Embed Size (px)
Citation preview

trIrobot-P
rojet d’étude et réalisation transversal1
trI-robot
Projet d’E
tude et Réalisation transversal
trIrobot-P
rojet d’étude et réalisation transversal2
Gam
elTrophy
-Le projet de S
1
Thèm
esInform
atique embarquée
Electrotechnique
Electronique de puissance
Electronique analogique
Com
pétences U
tilisation d’un logiciel de CA
O A
ltium-
ProtelD
XP
Utilisation d’une chaîne de développem
ent pour microcontrôleur
Travail en équipe de 6
Faire un gâteau
300 étudiants : 48 robots … 200 euros / robot

trIrobot-P
rojet d’étude et réalisation transversal3
trI-robot
–Le projet de S
2
Thèm
es A
utomatism
es industriels
Electronique analogique
Informatique em
barquée
Com
pétencesU
tilisation d’une chaîne de développement pour autom
ates
Utilisation des outils de conception d’un filtre
Travail en équipe de 6
150 étudiants : 8 parties opératives … 800 euros / par
tie opérative
trIrobot-P
rojet d’étude et réalisation transversal4
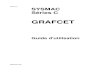
Vérin 3
Chargement
Vérin 0poubelle
Vérin 1
Gamelle
Stockage pièces bleues
Vérin 2goulotte
IS1
IS2
IS3
Présen
ce
Pièces
PS
Hauteur
Pièces
HP0 HP1
HP2
Ejection autres pièces
IS4
trI-robot
–présentation du projet
La partie opérative de triage

trIrobot-P
rojet d’étude et réalisation transversal5
Vérin 3
Chargement
Vérin 0poubelle
Vérin 1
Gamelle
Stockage pièces bleues
Vérin 2goulotte
IS1
IS2
IS3
Présen
ce
Pièces
PS
Hauteur
Pièce
sHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3
Chargement
Vérin 0poubelle
Vérin 1
Gamelle
Stockage pièces bleues
Vérin 2goulotte
IS1
IS2
IS3
Présen
ce
Pièces
PS
Hauteur
Pièce
sHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3Chargement
Vérin 0poubelle
Vérin 1Gamelle
Stockage pièces bleues Vérin 2goulotte
IS1
IS2
IS3
Présence
Pièces PS
Hauteur
PiècesHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3Chargement
Vérin 0poubelle
Vérin 1Gamelle
Stockage pièces bleues Vérin 2goulotte
IS1
IS2
IS3
Présence
Pièces PS
Hauteur
PiècesHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3
Chargement
Vérin 0poubelle
Vérin 1
Gamelle
Stockage pièces bleues
Vérin 2goulotte
IS1
IS2
IS3
Présen
ce
Pièces
PS
Hauteur
Pièce
sHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3
Chargement
Vérin 0poubelle
Vérin 1
Gamelle
Stockage pièces bleues
Vérin 2goulotte
IS1
IS2
IS3
Présen
ce
Pièces
PS
Hauteur
Pièce
sHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3Chargement
Vérin 0poubelle
Vérin 1Gamelle
Stockage pièces bleues Vérin 2goulotte
IS1
IS2
IS3
Présence
Pièces PS
Hauteur
PiècesHP0 HP1
HP2
Ejection autres pièces
IS4
Vérin 3Chargement
Vérin 0poubelle
Vérin 1Gamelle
Stockage pièces bleues Vérin 2goulotte
IS1
IS2
IS3
Présence
Pièces PS
Hauteur
PiècesHP0 HP1
HP2
Ejection autres pièces
IS4
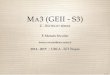
Poteau + B
alise1600 H
z -IR
Poste 1
Poste 2
Poste 3
Poste 4
trI-robot
–présentation du projet
10
10
2200 Hz
11
00
1000 Hz
verte
jaune
rouge
blanche
trIrobot-P
rojet d’étude et réalisation transversal6
Simuler un filtre
sous ProtelDXP (co
mportement temporel et fré
quentiel)
6
Définir la
forme d'une carte et ajouter un plan de masse
5
Mettre
àjour un PCB àpartir d
'un sch
éma et ro
uter un circu
it4
Simuler un sch
éma et affich
er les fo
rmes d'ondes so
uhaitées
3
Saisir u
n sch
éma et inclure une librairie
2
Créer un projet avec sch
éma et PCB etl'enregistre
r dans un répertoire précis
1
Objectifs
Altiu
m-ProtelDXP
Utilise
r le mode monitor pour déboguer un programme
5
Se connecter àl'automate et lancer l'e
xécution du programme.
4
Traduire des branches exclu
sives en ladder(OU)
3
Traduire une séquence linéaire en ladder
2
Créer un projet so
us Cx-programmerpour un automate donné
1
Objectifs
Cx-Programmer
Concevoir un filtre à partir d'un cahier des charges
5
Utiliser les séquences exclusives (divergence en O
U)
4
Traduire un cahier des charges sim
ple sous forme de G
RA
FC
ET
3
Connaître l'architecture d'un systèm
e automatisé de production
2
Faire un schém
a fonctionnel à partir d'un cahier des charges1
Objectifs
théoriq
ues

trIrobot-P
rojet d’étude et réalisation transversal7
Les étapes intermédiaires
Recherches bibliographique et fonctionnelle (questionnaire)
Apprentissage de la program
mation d'autom
ates. e1/e2, e3/e4, e5/e6
Objectif 1 : R
otation du plateau. (étudiants e1/e3) O
bjectif 1 bis détection de la couleur bonus (étudiants e5/e4 et e2/e6)
Objectif 2 tri des pièces bleues (étudiants e5/e2)
Objectif 2 bis détection de la couleur bonus (étudiant e1/e4 et e3/e6)
examen 1
Préparer la coupe
examen 2
Coupe trIrobot
trIrobot-P
rojet d’étude et réalisation transversal8
La conception du filtre1 –
Déterm
ination du gabarit (2nd ordre résonant)
2 –U
tilisation de Matlab
pour trouver les coefficients du filtre
3 –S
imulation du filtre sous M
atlab
4 –R
echerche d’une structure appropriée
5 –S
aisie du schéma sous A
ltium-P
rotel
6 –S
imulation tem
porelle et fréquentielle
7 –A
jout des potentiomètres, d’un détecteur de crête et
d’un comparateur, des m
ises à niveau 0-5V
8 –R
outage du typon / réalisation / test

trIrobot-P
rojet d’étude et réalisation transversal9
Bilan
-P
artie opérative simple m
ais complète. E
ncore quelques soucis de fiabilité.
-Auto-apprentissage
de la programm
ation des autom
ates à l’aide d’un tutorial.
-D
ifficultés des étudiants en électronique analogique-
gabarit moins exigeant =
> filtres du 1er ordre
-utilisation d’un logiciel de conception de filtre
-centrer les tensions sur 0 V
introduction à la 2nde année : parcours MO
SA
R…