Embed Size (px)
Citation preview

Projet d’ingénierie mathématique
Identification inverse des sources de chaleur
Par Joffrey BOURIEZ, Sébastien OLIVE, Julien SIGUENZA

2
Objectifs :
Les méthodes inverses sont des techniques qui consistent à remonter aux causes d’un
phénomène physique à partir de mesures expérimentales. Ces outils sont applicables dans
plusieurs domaines de l’ingénierie à savoir la géophysique, la météorologie, l’imagerie médicale,
la thermographie, etc. La distribution surfacique de température dans un milieu donné peut
fournir des informations sur les propriétés thermomécaniques ainsi que la présence ou pas de
défauts mécaniques dans le matériau (détection et localisation). Dans cette optique on cherche à
déterminer les sources appliquées dans un milieu unidimensionnel connaissant les cartes de
températures à différents instants. La méthode repose sur une discrétisation spatio-temporelle de
l’équation de la chaleur 1D permettant d’écrire le problème sous sa forme matricielle.
Tout d’abord nous avons résolu le problème direct par deux méthodes différentes :
numériquement (Euler explicite et implicite) et analytiquement. Puis nous nous sommes attachés
au problème inverse c’est à dire identifier les sources de chaleur à partir de cartes de
températures.
Le logiciel utilisé tout au long de cette étude est Matlab.
The inverse methods are techniques that involve trace the causes of a physical
phenomenon from measurements experimental. These tools are applicable in several areas such
as engineering geophysics, meteorology, imaging of medical thermography, etc. The surface
distribution of temperature in a given environment can provide information on thermo-
mechanical properties and the presence or absence of defects mechanical material (detection and
location). In this optical seeking to determine the sources used in a medium knowing the one-
dimensional temperature maps at different moments. The method relies on a discrete space-time
1D heat equation to write the problem as it matrix.
First we solved the direct problem by two methods: numerically (Euler) and analytically.
Then we attached to the inverse problem is to say to identify heat sources from maps of
temperature.
The software use throughout this study is Matlab.

3
Table des matières
I. Mise en équation ............................................................................................................................ 4
II. Résolution analytique .................................................................................................................. 5
III. Résolution numérique ................................................................................................................. 7 1. Différences finies.................................................................................................................................. 7
a) Euler explicite ..............................................................................................................................................................7 b) Euler implicite .............................................................................................................................................................8
2. Résolution sous Matlab ................................................................................................................... 10 a) Euler explicite ........................................................................................................................................................... 10 b) Euler implicite .......................................................................................................................................................... 12
IV. Comparaison entre solution analytique et solutions numériques ..............................14 1. Euler explicite .................................................................................................................................... 14 2. Euler implicite .................................................................................................................................... 15 3. Erreur entre la solution analytique et la solution numérique implicite .......................... 16
V. Identification inverse de la source de chaleur ...................................................................17 1. Première méthode : différences finies ....................................................................................... 17 2. Deuxième méthode : séries de Fourier ....................................................................................... 18 3. Erreur entre la source appliquée et la résolution inverse ................................................... 19 4. Traitement du bruit.......................................................................................................................... 20
VI. Prolongement : Etude en 2 dimensions ................................................................................21 1. Résolution analytique ...................................................................................................................... 21 2. Résolution numérique 2D .............................................................................................................. 22
VII. Conclusion ......................................................................................................................................24
VIII. Bibliographie ..........................................................................................................................25
IX. Annexe :...........................................................................................................................................26
4
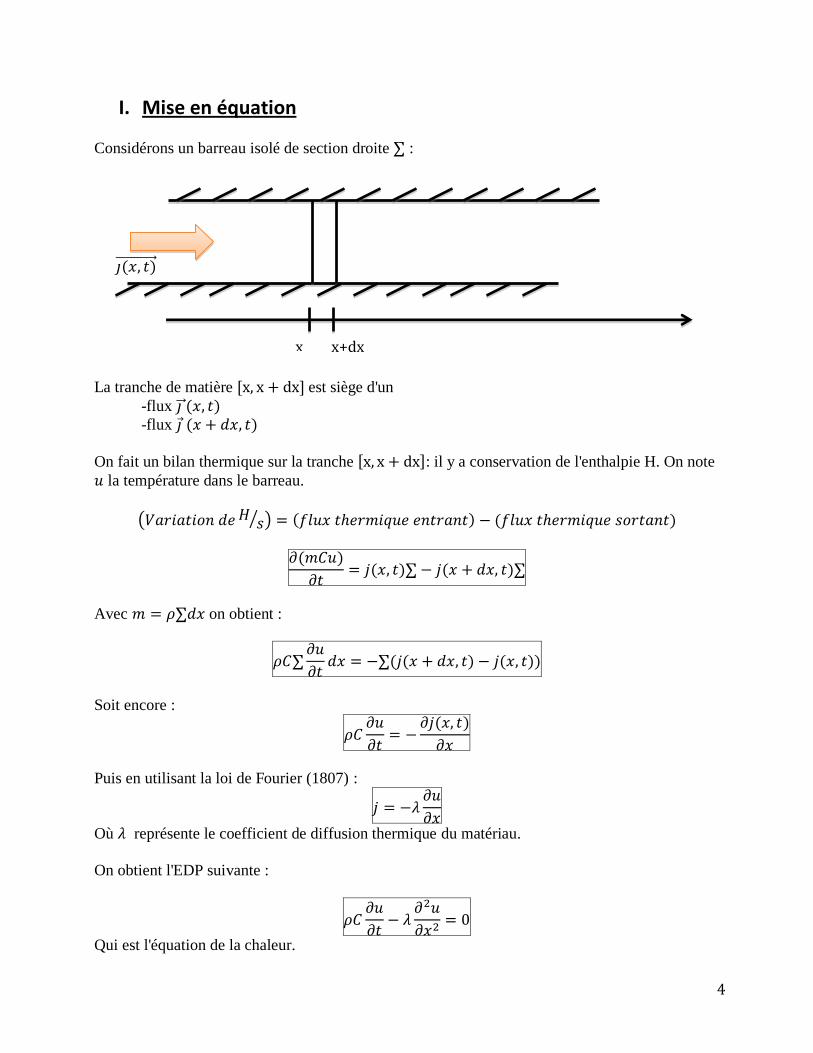
I. Mise en équation
Considérons un barreau isolé de section droite :
La tranche de matière est siège d'un
-flux -flux
On fait un bilan thermique sur la tranche : il y a conservation de l'enthalpie H. On note
la température dans le barreau.
Avec on obtient :
Soit encore :
Puis en utilisant la loi de Fourier (1807) :
Où représente le coefficient de diffusion thermique du matériau.
On obtient l'EDP suivante :
Qui est l'équation de la chaleur.
x x+dx

5
II. Résolution analytique
Pour faire l’identification inverse d’une source de chaleur, il faut qu’on se donne une carte
de température. On se propose donc d’étudier la diffusion de la chaleur dans un fil de longueur L
en appliquant une certaine source de chaleur.
Ensuite, à partir de la carte de température obtenue, on va remonter à la source de chaleur
en prenant soin de comparer la source obtenue avec la source que l’on avait appliquée.
Pour cela on va résoudre le système d’équation aux dérivées partielles suivant :
Pour commencer, on se propose de trouver les valeurs propres du Laplacien de
ainsi que les fonctions propres associées soit :
avec
Après résolution on obtient :
valeurs propres de . De même on obtient les
fonctions propres associées :
(Cf. annexe (A) pour le détail des calculs)
D’où :
En remplaçant par cette expression dans (1) et en utilisant la relation (2) on obtient l’équation suivante :
Pour commencer, on appliquera une source de chaleur égale à
sur toute la longueur de la
barre, la dernière expression devient donc :
K = coefficient de diffusion thermique (
ρ = masse volumique (
C = capacité calorifique ( (1)

6
En utilisant les propriétés d’orthogonalité de la base de fonction
, on projette
l’expression précédente sur cette base en effectuant le produit scalaire et on obtient finalement
l’EDO avec second membre suivante :
Dont la solution s’écrit :
(Cf. annexe (B) pour le détail des calculs)
La solution devient donc :
On cherche maintenant à déterminer . Pour cela, on va utiliser la condition initiale. En effet on a :
Soit On a donc :
Maintenant, on décide d’appliquer une source de chaleur égale à sur notre barre. On obtient donc l’expression suivante :
En utilisant la même méthode que précédemment, on obtient l’EDO suivante :
pour soit
pour soit
(Cf. annexe (C) pour le détail des calculs)

7
La solution devient donc :
On cherche maintenant à déterminer . Pour cela, on va utiliser la condition initiale. En effet
on a :
Soit On a donc :
III. Résolution numérique
1. Différences finies
a) Euler explicite
Le logiciel de calculs que nous utilisons, Matlab, peut résoudre l'EDP précédente à
condition de faire une discrétisation du temps et de l'espace.
A partir d'un développement limité de Taylor au premier ordre en temps et au 2ème ordre
en espace, on obtient une approximation de la dérivée première et seconde de la température par
rapport au temps et à l'espace :
Soit u la fonction qui représente la température. Elle dépend de la position x et du temps t. On
pose .
On applique la formule de Taylor à cette fonction :
Issue du développement de Taylor au premier ordre.
On obtient donc:
Ce qui donne avec les notations :

8
Puis pour la dérivée seconde en espace on procède de la même façon :
Posons tout d'abord puis et
On fait la somme on obtient l'approximation de la dérivée seconde en espace :
Ou encore avec les notations précédentes :
Au final l'équation de la chaleur démontrée obtenue dans la partie précédente peut être
résolue numériquement à l'aide du schéma suivant :
Ce qui nous donne :
C’est donc à partir de cette dernière relation que nous allons résoudre numériquement le
problème direct de l’équation de la chaleur sous Matlab.
b) Euler implicite
Pour la méthode implicite, nous allons reprendre le même raisonnement que
précédemment. Nous allons discrétiser l’espace et le temps à partir du développement de Taylor à
l’ordre 1 en temps et à l’ordre 2 en espace.
Suite au développement de Taylor vu précédemment on obtient la relation suivante en
négligeant les termes supérieurs à 1.

9
On obtient alors la dérivée de u par rapport au temps :
Ensuite, pour effectuer la dérivée spatiale, intéressons-nous au temps suivant. En
procédant de la même façon que précédemment on pose :
, puis et
On fait la somme on obtient l'approximation de la dérivée seconde en espace :
Nous pouvons donc écrire l’équation de la chaleur vue plus haut de la façon suivante en tenant
compte du terme source:
En revanche, nous ne pouvons pas résoudre numériquement le problème avec l’équation
sous cette forme. Utilisons alors une méthode matricielle et posons
, ainsi que T la
matrice tri-diagonale comportant des -2 sur sa diagonale et des 1 sur ses extra diagonales (matrice
du Laplacien). Nous pouvons maintenant écrire :
On obtient donc après avoir posé I la matrice identité et inversé la matrice (I-DT) :
C’est donc à partir de cette dernière relation que nous allons résoudre numériquement le
problème direct de l’équation de la chaleur sous Matlab.

10
2. Résolution sous Matlab
a) Euler explicite
On considère ici un fil de longueur , de coefficient de diffusion thermique
, de masse volumique , une capacité calorifique unitaire
de .
Le fil est chauffé de la façon suivante :
Il s’agit d’une fonction porte en espace: le fil est chauffé sur avec une
valeur de la source égale à
.
On choisit un pas de temps et un pas d’espace .
La répartition de température initiale du fil est nulle.
Afin d’obtenir une solution, nous avons programmé dans un premier temps la méthode
d’Euler explicite sur Matlab de la façon suivante :
Ici j représente l’indice de colonne de la matrice « u », u est donc une matrice dont les
colonnes représentent le temps et les lignes l’espace. Pour connaître la répartition de température
dans le fil à un instant donné, il suffit donc d’extraire une colonne de cette matrice.
Il reste à tracer la solution. Matlab s’avère être une nouvelle fois un bon outil. La fonction
imagesc nous permet d’avoir sur la même figure le temps, l’espace et la température (Figure 1) :
for j=2:length(t)
u(1,j)=0;
u(length(x),j)=0;
for i=2:length(x)-1
u(i,j)=u(i,j-1)+alpha*(u(i+1,j-1)…
…-2*u(i,j-1)+u(i-1,j-1))+delta_t*s(i)/(rho*C);
end
end
imagesc(t,x,u);
colorbar;
xlabel('temps(t)')
ylabel('espace(x)')
title('Evolution de la température (méthode numérique)')
Y=zeros(length(x),1);
for i=1:length(x)
if (x(i) > 0.7) & (x(i) <= 0.8)
Y(i)=2/(pi^2);
end
end

11
La Figure 1, représente la répartition de température (en Kelvin) en fonction de
l’espace(m) et du temps(s), pour un pas d’espace qui vaut 0,01 et un pas de temps de 0,1:
On constate que la chaleur s’est diffusée au sein su fil ou cours du temps. Bien entendu la
température obtenue est relative à la température ambiante prise pour référence.
Stabilité de la méthode :
Commençons par poser
. La condition de convergence de cette méthode est
pour limiter la propagation de l'erreur de troncature qui est faite dans les approximations
des dérivées.
Si on ne respecte pas cette condition, on obtient la courbe de la figure 2, qui représente la
température (en Kelvin) en fonction de la position (en mètre) à un pas de temps fixé. On constate
clairement que la méthode diverge :
C’est instable
Figure 1
Figure 2

12
K2=inv(eye(length(x))-alpha1*K);
theta(1,i)=0;
theta(length(x),i)=0;
for i=2:length(t)
theta(:,i)=K2*(theta(:,i-1)+ delta_t*s/(rho*C));
theta(1,i)=0;
theta(length(x),i)=0;
end
b) Euler implicite
Ici, on prend un pas de discrétisation spatiale de 0,001 car nous n’avons pas de problème
de divergence de la méthode. Les autres variables reprennent les mêmes caractéristiques que dans
la méthode explicite, ainsi que la valeur de la source (Figure 3).
Pour notre exemple on chauffe le fil de la façon suivante :
Le script permettant de résoudre le problème implicite est le suivant :
Ici nous avons K2 la matrice inverse de (I- T) vu plus haut, s la source appliquée.
Le graphe de la figure 3 représente la répartition de température (en Kelvin) en fonction
de l’espace (m) et du temps(s) :
Y=zeros(length(x),1);
for i=1:length(x)
if (x(i) > 0.7) & (x(i) <= 0.8)
Y(i)=2/(pi^2);
end
end
Figure 3

13
On obtient la même figure que celle obtenue avec Euler explicite. En fait, l’avantage de
cette méthode est qu’elle permet une meilleure discrétisation tout en ayant une bonne
convergence. On a plus de problème avec le coefficient qui devait être choisit inférieur à
.
Le fait de diminuer les pas de temps et d’espace permet en effet d’avoir une meilleure
précision sur les résultats, ce qui se traduit ici par une meilleure résolution sur les figures.
Mise en évidence de la stabilité :
On trace Figure 4 la température (en Kelvin) en fonction du temps (s) en un point de
l’espace donné. On a choisi un coefficient
.
Très rapidement on constate que la méthode d’Euler explicite diverge alors que la
méthode implicite est toujours convergente. On dit de cette méthode qu’elle est inconditionnellement stable. Elle converge pour n’importe quelle valeur de la constante
Figure 4

14
IV. Comparaison entre solution analytique et solutions numériques
Pour des pas d’espace différents, nous allons, dans cette partie, comparer les profils de température obtenues par les méthodes analytique et numériques.
1. Euler explicite
Nous avons dit plus haut que la valeur du pas d’espace influe sur la précision du résultat. Ceci est mis en évidence dans sur les Figure 5 et 6, qui représente l’évolution de la
température (en Kelvin) en fonction de l’espace (m) pour différentes valeurs du pas où le fil est chauffé de manière constante sur toute sa longueur (Figure 5), ou en sinus (Figure 6).
On constate sur la figure 5 que la solution analytique en bleue et la solution
numérique en rouge, avec le schéma numérique Euler explicite pour un pas d’espace égale à 0,05 sont quasiment superposées. Si le pas d’espace augmente, on s’éloigne de la solution
analytique. Il faut cependant toujours veiller à ce que le rapport
pour conserver
la convergence. Néanmoins on peut voir que lorsqu’on applique une source de chaleur plus complexe
(fonction sinus), la discrétisation doit être plus faible pour mieux approcher la solution analytique (figure 6). Or ici, on ne peut pas discrétiser comme on veut car on doit respecter
σ
. On atteint les limites de la méthode d’Euler explicite.
Figure 5 Figure 6

15
2. Euler implicite
Traçons la solution analytique et la solution obtenue par la méthode d’Euler implicite pour différents pas d’espace (Figure 7 et Figure 8) :
Nous pouvons observer sur les Figures 7 et 8, qui représentent la température (en
Kelvin) en fonction de l’espace (m) pour différentes valeurs du pas d’espace, que la méthode d’Euler implicite nous permet de résoudre le problème avec un pas de discrétisation en espace très petit. On remarque que plus le pas est petit et plus nous sommes proche de la solution analytique. De plus, on peut remarquer que pour la résolution sur une fonction simple, comme une source constante sur toute la barre, un « grand » pas de discrétisation suffit. Cependant, pour des fonctions plus complexes tels que la fonction sinus, nous devons discrétiser beaucoup plus pour nous rapprocher de la solution analytique. On observe aussi l’avantage de la méthode implicite car nous n’avons pas de problème de divergence de la méthode.
Comparaison entre la méthode implicite et explicite : On constate que la méthode implicite nous procure une grande précision de
résolution pour des pas très petits car nous n’avons pas de problème de divergence. On remarque que pour une fonction simple la solution donnée par la méthode explicite est une bonne approximation, en revanche pour une fonction telle que la fonction sinus la méthode explicite atteint ses limites. Il devient donc plus intéressant d’utiliser la méthode implicite pour des pas de discrétisation plus petits avec en contrepartie des temps de calcul plus importants.
Figure 7 Figure 8
16
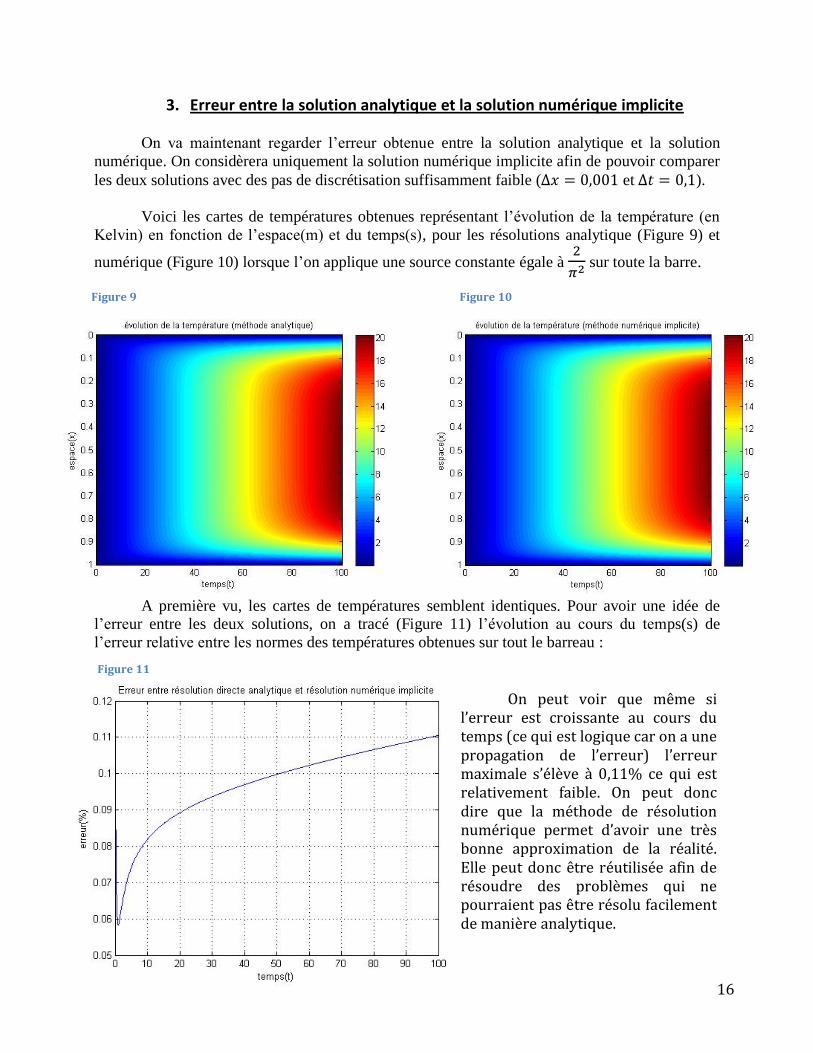
3. Erreur entre la solution analytique et la solution numérique implicite
On va maintenant regarder l’erreur obtenue entre la solution analytique et la solution
numérique. On considèrera uniquement la solution numérique implicite afin de pouvoir comparer
les deux solutions avec des pas de discrétisation suffisamment faible ( et ).
Voici les cartes de températures obtenues représentant l’évolution de la température (en
Kelvin) en fonction de l’espace(m) et du temps(s), pour les résolutions analytique (Figure 9) et
numérique (Figure 10) lorsque l’on applique une source constante égale à
sur toute la barre.
A première vu, les cartes de températures semblent identiques. Pour avoir une idée de l’erreur entre les deux solutions, on a tracé (Figure 11) l’évolution au cours du temps(s) de
l’erreur relative entre les normes des températures obtenues sur tout le barreau :
Figure 9 Figure 10
Figure 11
On peut voir que même si l’erreur est croissante au cours du temps (ce qui est logique car on a une propagation de l’erreur) l’erreur maximale s’élève à 0,11% ce qui est relativement faible. On peut donc dire que la méthode de résolution numérique permet d’avoir une très bonne approximation de la réalité. Elle peut donc être réutilisée afin de résoudre des problèmes qui ne pourraient pas être résolu facilement de manière analytique.

17
V. Identification inverse de la source de chaleur
1. Première méthode : différences finies Pour remonter à la source de chaleur en connaissant la carte de température nous utilisons les relations des méthodes vues plus haut. Pour la méthode d’Euler explicite, on reprend la relation suivante :
Il nous reste à isoler et on obtient :
La relation d’Euler implicite nous donne la relation suivante permettant de remonter à la source.
Cette relation est à appliquer à une carte de température pour retrouver la valeur et
la position de la source imposée à chaque instant, les deux méthodes sont équivalentes pour remonter à la source.
Nous allons donc utiliser les cartes de températures obtenues précédemment pour remonter à la source ayant entraînée cette température, grâce à la méthode inverse des différences finies. On a donc tracé, sur les figures 12 et 13, l’évolution de la source ( )
en fonction de l’espace(m) et du temps(s).
Fonction porte en espace : Fonction constante :
Figure 12 Figure 13
18
2. Deuxième méthode : séries de Fourier
Supposons que nous sommes en possession d’une carte de température . est donc une matrice de dimension X*T ou X est le plus grand indice d’espace et T le plus grand indice de temps.
Pour identifier une source de chaleur à partir de cette carte de température, on peut se baser sur la résolution analytique de l’équation de la chaleur. On sait que la solution de cette équation s’écrit sous la forme :
Ici on connait et on cherche à déterminer dans lequel intervient le terme source. Pour cela, on utilise les propriétés du produit scalaire :
Il ne reste plus que le terme k=i de la somme :
Soit en remplaçant l’indice muet i par k:
(Intégrales discrètes)
Une fois les valeurs connues, on peut remonter à la source en calculant successivement la dérivée première par rapport au temps en utilisant la forme discrétisée de la dérivée :
Ainsi que la dérivée seconde par rapport à (Laplac e e ér va t eu fo l’e pre o
:
Soit :

19
On obtient donc notre source de chaleur de la manière suivante :
On obtient donc, en utilisant les mêmes cartes de température que précédemment,
les sources suivantes (Figure 14 et Figure 15) : évolution de la source (en ) en fonction de l’espace(m) et du temps(s).
Fonction porte en espace : Fonction constante :
3. Erreur entre la source appliquée et la résolution inverse On va maintenant regarder l’erreur qu’il y a entre la source que l’on a initialement
appliquée pour obtenir la carte de température et la source obtenue par les méthodes d’identification inverse (Figure 16). Pour cela nous avons regardé l’évolution au cours du
temps(s) de l’erreur relative entre les normes des sources obtenues sur tout le barreau.
Figure 14 Figure 15
Figure 16

20
r=zeros(length(x),length(t)); r(:,:)=0.5; Bruit = (1/20)*(r-rand(length(x),length(t))); thetaB = theta + Bruit;
Pour la méthode des séries de Fourier, on remarque une erreur maximale de 2,7% pour une sommation allant de à . Elle peut être considérée comme faible. De plus, on remarque que la méthode des différences finies engendre une erreur plus faible sur la source obtenue que la méthode des séries de Fourier. On remarque aussi une diminution de l’erreur pour la méthode des séries de Fourier lorsque nous calculons plus de termes dans la somme (pour n plus grand). On peut donc conclure que les deux méthodes sont convenables pour remonter à la source de chaleur avec tout de même une meilleure précision pour la méthode des différences finies et une plus grande facilité de mise en œuvre.
4. Traitement du bruit
Dans cette partie, on se propose de réaliser un traitement du bruit, qui pourrait servir à
éventuellement traiter une carte de température bruitée et de pouvoir remonter à la source
appliquée.
Pour cela on va simuler du bruit afin d’avoir une carte de température « bruitée » qu’on
pourra par la suite traiter.
On prend donc notre carte de températures et on rajoute à chaque valeur de température
une valeur aléatoire comprise entre -0.025 et +0.025 de la manière suivante :
On obtient alors une carte de température « bruitée ». On créé ensuite une fonction Matlab
nommée TraitementBruit.m qui va nous permettre de traiter cette carte de température afin de la
« purifier » et ensuite de remonter à la source appliquée.
Dans cette fonction, on va commencer par calculer le coefficient vu dans la
méthode de résolution inverse faisant appel aux séries de Fourier.
En effet on a :
où représente les composantes de
notre carte « bruitée ».
Ensuite on réécrit notre température sous la forme :
On remonte ensuite à la source de la même manière que précédemment mais en utilisant la carte
de température « traitée » au lieu de la carte de température « bruitée ».
Comparons les deux sources obtenues, sans traitement du bruit (Figure 17), et avec traitement du
bruit (Figure 18) : évolution de la source (en ) en fonction de l’espace(m) et du temps(s).

21
On peut voir que la source obtenue avec traitement du bruit est plus lisse que la source
obtenue sans traitement du bruit. Pour nous conforter dans l’utilité de ce traitement, on va
regarder l’erreur maximale entre la norme de la source appliquée (à chaque pas de temps) et la
norme de la source obtenue (avec et sans traitement) :
Entre la source appliquée et la source sans traitement on obtient : 4.9572%
Entre la source appliquée et la source avec traitement on obtient : 4.7309%
On peut donc voir que l’impact du bruit est plus faible lorsqu’on effectue le traitement du
bruit, notre méthode de traitement du bruit fonctionne. Cependant la différence d’erreur avec la
source non traitée est faible, le traitement n’a donc pas une très grande utilité pour ce type de
source (fonction porte en espace).
VI. Prolongement : Etude en 2 dimensions
1. Résolution analytique
Dans cette partie, on va décrire les grandes lignes de la résolution analytique qui est particulièrement longue. Il s’agit de résoudre le système suivant :
t
Où
et est une fonction source, le domaine d’intégration et la
frontière de ce domaine. On suppose qu’il existe une fonction à variables séparables qui soit solution du système précédent telle que .
Figure 17 Figure 18

22
une fonction qui dépend du temps et égale à une fonction qui dépend seulement de l’espace. La seule possibilité est :
Puis il faut faire la même chose pour les fonctions g et h en posant une nouvelle constante :
Il faut étudier les signes des différentes constantes introduites et finir la résolution comme cela a été fait au chapitre 2. Compte tenu de la longueur des calculs, on se rend compte ici qu’il est utile d’utiliser une méthode numérique pour résoudre le système. C’est ce qui est présenté dans la partie suivante : on étudie la diffusion de chaleur dans une plaque. Puis on va montrer comment il est possible de remonter aux sources qui ont imposé cette répartition de chaleur.
2. Résolution numérique 2D
On va résoudre numériquement le système précédent en 2 dimensions. On va chauffer une plaque carrée de 1m2 en son centre sur une surface carrée.
La fonction meshgrid va ici nous servir à transformer un domaine spécifié par 2 vecteurs en un tableau qui va permettre d’évaluer les fonctions de 2 variables. [Matlab] Plus simplement, elle crée un maillage.
Avec le schéma numérique Euler explicite, et en suivant le même démarche que celle effectuée dans les parties précédentes, on transforme le système en :
A ce stade on peut obtenir la solution. En effet, nous avons déjà effectué ce type de calcul en 2a. Nous obtenons alors les figures 19, 20 et 21 qui représentent la température (en Kelvin) en fonction de la position (x, y) (m) pour différents instants t :

23
Dans la mesure où la carte de température est connue, nous sommes capables de
revenir à la source (figure 22). Pour cela il suffit de calculer chacun des termes de l’équation précédente un à un et de les sommer. Nous obtenons la Figure 22 qui est la source obtenue par identification inverse à un instant donné et la Figure 23 qui est la source appliquée. Source (en ) en fonction de la position (x, y) (m) pour un instant t quelconque :
La méthode de résolution inverse numérique nous permet donc bien de revenir à la
source appliquée. En effet, lorsque l’on compare la source obtenue (Figure 22) et la source appliquée (Figure 23), à un instant donné, on constate qu’elles sont quasiment identiques.
Figure 19
Figure 22 Figure 23
Figure 20 Figure 21

24
VII. Conclusion
Nous avons montré au cours de cette étude qu’il est possible de connaître la répartition de température au sein d’un matériau (1D et 2D) et qu’il est également possible de remonter à la source de chaleur qui a imposé cette répartition. La méthode analytique nous a tout d’abord permis de résoudre le problème d’équation aux dérivées partielles. Elle repose sur l’analyse spectrale de l’opérateur Laplacien. Puis nous avons mis en œuvre des méthodes numériques telles que Euler explicite et implicite. Ici s’est alors posé un problème de convergence qui a été résolu par un choix éclairé de constante, même si il n’est pas toujours bon d’utiliser Euler implicite, qui est inconditionnellement stable, car Euler explicite est souvent suffisante pour les problèmes qui ne nécessitent pas une grande précision.
L’identification inverse de sources de chaleur peut être faite de deux manières différentes. En effet, nous avons ici traité la méthode numérique via les différences finies et la méthode de Fourier.
L’outil numérique est donc le bienvenu dans la résolution des équations aux dérivées partielles car il s’avère être très performant et souvent il est le seul moyen de résoudre des équations qui ne peuvent pas être résolues analytiquement (notamment la résolution en 2D est nettement plus simple). Les méthodes numériques, qui donnent une bonne approximation de la réalité nous évitent en fin de compte de chercher une solution analytique, laborieuse suivant le cas envisagé.
D’un point de vu plus personnel, ce projet a été pour nous l’occasion de mettre en œuvre les concepts vus en cours, de mieux les assimiler et nous a permis de nous plonger plus profondément dans l’outil de calcul scientifique qu’est Matlab.
25
VIII. Bibliographie Livres :
L’équation de la chaleur : Méthode des différences finies, Transformation de Fourier, Une méthode de calcul, Gilles TISSIER
Technique de résolution des équations aux dérivées partielles, Jacques LEGRAS
Sites : Wikipédia : Conduction thermique : http://fr.wikipedia.org/wiki/Conduction_thermique P-Y Lagrée, Equation de la chaleur : http://www.lmm.jussieu.fr/~lagree/COURS/MECAVENIR/cours4_eqchal_loc.pdf Université le Mans : Equations aux dérivées partielles, Solutions classiques, Différences finies, Alexandre POPIER : http://perso.univ-lemans.fr/~apopier/enseignement/M1_Maths_EDP_sol_clas.pdf Calcul Scientifique pour les sciences de l’ingénieur, Bruno KOOBUS et Franck NICOUD http://www.maths.univ-montp2.fr/~nicoud/Cours/module%doctoral.ppt Cours : Mathématiques pour l’ingénieur (M. KOOBUS), Modélisation mathématique (Mme KRAZUCKI, M. AZERAD), (cours et TP4), Calcul scientifique (M. NICOUD), Analyse et traitement de données (M. WATRISSE), (cours et TP3).

26
IX. Annexe :
(A) :
On a soit
On obtient donc l’EDO suivante :
Prenons le cas < 0 :
On obtient on pose d’où :
Les conditions aux limites nous donnent :
Soit :
On doit donc avoir
Donc on a soit :
-
- d’où donc ou
Ces solutions sont valables mais sans aucun intérêt pour la résolution du problème, on prendra
donc .
Prenons le cas = 0 :
On obtient soit d’où
Les conditions aux limites nous donnent :

27
Donc on a soit :
- et
- et
Ces solutions sont valables mais sans aucun intérêt pour la résolution du problème, on prendra
donc .
On a donc > 0 :
On obtient on pose d’où :
soit co
Les conditions aux limites nous donnent :
Donc on a soit :
- et sans aucun intérêt pour la résolution du problème
- et
On a donc d’où les valeurs propres du Laplacien de :
Les fonctions propres associées sont donc :
(B) : On a :
On effectue le produit scalaire en procédant de la manière suivante :
Or on a =
On obtient donc:
L quand
0 quand

28
Soit :
étant une variable muette, on obtient l’EDO avec second membre suivante :
Or on a:
co
Soit :
L’EDO s’écrit donc de la manière suivante :
La résolution de l’équation homogène nous donne :
Soit :
Pour la solution particulière, on utilise la méthode de variation de la constante qui nous donne :
En réinjectant cette dernière expression dans l’EDO on obtient l’expression suivante :
On obtient donc :
Soit :
On a donc :

29
La solution générale de l’EDO s’écrit donc de la manière suivante :
Soit :
On a :
Soit :
D’où l’expression finale :
(C) : On a :
On effectue le produit scalaire :
On obtient:
Soit :
étant une variable muette, on obtient l’EDO avec second membre suivante :
On a:
co
co
30
Si on a alors :
D’où l’EDO suivante :
dont la solution est soit
Si on a on a l’EDO suivante :
Soit :
D’où :
La solution homogène nous donne :
La solution particulière s’écrit sous la forme :
En réinjectant cette dernière expression dans l’EDO on obtient l’expression suivante :
On obtient donc :
Soit :
On a donc :

31
La solution générale de l’EDO s’écrit donc de la manière suivante :
Soit :
On a :
Soit :
D’où l’expression finale :





























