Embed Size (px)
Citation preview



Radio frequency propagation mathematics
Project RF Karma
J.B.Lange
Defence R&D Canada – Ottawa
Technical Memorandum DRDC Ottawa TM 2010-082 August 2010

Principal Author
Original signed by J.B.Lange
J.B.Lange
Principle Author
Approved by
Original signed by J.F.Rivest
J.F.Rivest
H/REW
Approved for release by
Original signed by B.Eatock
B.Eatock
H/DRP
© Her Majesty the Queen in Right of Canada, as represented by the Minister of National Defence, 2010
© Sa Majesté la Reine (en droit du Canada), telle que représentée par le ministre de la Défense nationale, 2010

DRDC Ottawa TM 2010-082 i
Abstract ……..
DRDC Ottawa has been tasked to formulate the means by which to extend the Karma simulation framework that was developed by DRDC Valcartier from the electro-optic and infrared regions of the electromagnetic spectrum to include the radio frequency portion as well. This document identifies the factors which affect the propagation of radar signals in a benign environment, including atmospheric and terrain effects. A selection of relevant models available in the open literature is described and discussions of the background physics of these models are given where necessary. Finally, recommendations for the implementation of target engagement through active rather than passive tracking are outlined.
Résumé ….....
RDDC Ottawa s’est vu confié la tâche d’étendre le cadre de simulation Karma, créé par RDDC Valcartier pour les composantes électro-optique et infrarouge du spectre électromagnétique, à la composante des radiofréquences. Le présent document cerne les facteurs, dont les effets atmosphériques et les effets du terrain, qui influent sur la propagation des signaux radar dans un environnement anodin. Le document comporte aussi les descriptions d’un choix de modèles pertinents publiés dans la littérature non classifiée, et des discussions sur les principes de physique derrière ces modèles sont données où nécessaire. Enfin, sont indiquées des recommandations favorisant l’engagement de cible par la poursuite active plutôt que passive.

ii DRDC Ottawa TM 2010-082
Introspection of
One’s own nature allows for
Karmic expansion.

DRDC Ottawa TM 2010-082 iii
Executive Summary
Radio frequency propagation mathematics: Project RF Karma
J.B.Lange; DRDC Ottawa TM 2010-082; Defence R&D Canada – Ottawa; August 2010.
Introduction: The Karma modeling environment was developed by DRDC Valcartier in the early 2000’s as a flexible framework which allows for diverse models to interact within various configurations for real-time electronic warfare simulation. The environment was developed around the electro-optic/infrared portion of the electromagnetic spectrum. DRDC Ottawa has been tasked to investigate the feasibility of extending the Karma framework to include the radio frequency portion of the electromagnetic spectrum as well. This document presents a review of models from the open literature that are required to generate a realistic environment for radio frequency signal propagation. Characteristics internal to radar models are not covered here.
Factors: There are a numbers of factors that affect the propagation of radar signals, beginning with simple free space loss. As the medium of propagation, the atmosphere impacts radar signals through refraction, gaseous absorption and attenuation by weather. Terrain can cause multipath from ground reflection, interference in field formation as well as partial masking of targets. Clutter interference can arise either from interaction with the earth’s surface or from airborne elements or both. Models for each of these factors are identified with a discussion of the relevant background physics where appropriate.
Issues: The main issue with extending the Karma framework to include radio frequency signals is a migration from a sensor-driven approach to an emitter-driven approach. Since electro-optic and infrared signals are always present, the related passive sensors are able to request scene generation for instances of time as required. Radar is by its nature active, and signals are the result of discrete transmissions. The arrival of target information at a sensor is therefore independent of the readiness of that sensor to receive the information. Data queues must be created so that information can be presented to sensors at the appropriate time. Secondary issues that must be accommodated are Doppler shifts due to radar and sensor motions, interference arising from multiple emitters and/or multipath effects, changes in signal polarization due to platform motion and antenna pattern management.
Future plans: This document should be considered as an initial subject matter report. The mathematics covered herein are sufficient to develop a realistic radio frequency environment. This information is being provided to the Karma architects at DRDC Valcartier for their review and comment. There are other factors that can be considered to increase the suitability of a scenario, but they are aligned to specific scenarios and can be spelled out as required.

iv DRDC Ottawa TM 2010-082
Sommaire .....
Radio frequency propagation mathematics: Project RF Karma
J.B.Lange; DRDC Ottawa TM 2010-082; R & D pour la défense Canada – Ottawa; Août 2010.
Introduction: L’environnement de modélisation Karma, mis au point au début des années 2000 par RDDC Valcartier pour les composantes électro-optique et infrarouge du spectre électromagnétique, est un cadre souple permettant à divers modèles d’interagir au sein de configurations variables lors de simulations en temps réel de guerre électronique. RDDC Ottawa a été chargé d’étudier la faisabilité d’étendre le cadre Karma à la composante radioélectrique du spectre. Le document examine les modèles de la littérature non classifiée qui sont nécessaires à la création d’un environnement réaliste pour la propagation des signaux radioélectriques. Les caractéristiques intrinsèques des modèles radars ne sont pas abordées.
Facteurs: Plusieurs facteurs influencent la propagation des signaux radar, dont le simple affaiblissement en espace libre. La propagation dans l’atmosphère a également incidence sur les signaux radar : réfraction, absorption gazeuse, atténuation due aux conditions météorologiques. Le terrain peut causer la propagation par trajets multiples, par la réflexion du sol, le brouillage du champ et le masquage partiel des cibles. En outre, la surface de la terre ou des éléments en suspension dans l’air peuvent produire des échos parasites. Des modèles pour chacun de ces facteurs sont décrits et si nécessaire comportent une discussion sure les principes de physique pertinents derrière ceux-ci.
Enjeux: La transition d’une méthode basée sur les capteurs vers une méthode basée sur les émetteurs est le principal problème lorsque l’on veut étendre le cadre Karma aux signaux radioélectriques. Puisque des signaux électro-optiques et infrarouges sont toujours présents, les capteurs passifs connexes peuvent demander la génération de scènes pour des instances de temps au besoin. Le radar est fondamentalement actif et les signaux résultent d’émissions discrètes. L’arrivée d’informations sur une cible à un capteur est donc indépendante de sa disposition à recevoir ces informations. Des files de données doivent être créées pour envoyer les informations au capteur au moment opportun. Les décalages Doppler causés par les mouvements du radar et des capteurs, le brouillage causé par des émetteurs multiples ou les effets de la propagation par trajets multiples, des changements dans la polarisation des signaux causés par le mouvement de la plateforme et la gestion des diagrammes d’antenne sont aussi des problèmes dont il faut tenir compte.
Recherches futures: Le présent document constitue un premier rapport sur la question. Les éléments mathématiques qui y sont décrits suffisent à la création d’un environnement radioélectrique réaliste. Cette information est fournie aux architectes du Karma de RDDC Valcartier, pour fins d’étude et de mise en œuvre. D’autres facteurs peuvent être considérés pour augmenter la pertinence d’un scénario, mais ils sont liés à des scénarios particuliers et peuvent êtres décrits au besoin.

DRDC Ottawa TM 2010-082 v
Table of Contents
Abstract …….. ................................................................................................................................. iRésumé …..... ................................................................................................................................... iExecutive Summary ....................................................................................................................... iiiSommaire ....................................................................................................................................... ivTable of Contents ........................................................................................................................... vList of Figures .............................................................................................................................. viiList of Tables .................................................................................................................................. x1....Introduction............................................................................................................................... 1
1.1 Background ................................................................................................................... 11.2 Document Scope............................................................................................................ 21.3 RF Transmission Considerations................................................................................... 31.4 Document Layout .......................................................................................................... 5
2....Free Space Loss ........................................................................................................................ 63....Atmospheric Effects ................................................................................................................. 8
3.1 Atmospheric Refraction................................................................................................. 83.2 Atmospheric Absorption ............................................................................................. 133.3 Weather Attenuation.................................................................................................... 15
3.3.1 Clouds ........................................................................................................... 163.3.2 Rain ............................................................................................................... 18
4....Environmental Effects ............................................................................................................ 214.1 Surface Clutter............................................................................................................. 214.2 Volume Clutter ............................................................................................................ 27
4.2.1 Hydrometers.................................................................................................. 284.2.2 Biologics ....................................................................................................... 304.2.3 Chaff.............................................................................................................. 31
5....Terrain Effects ........................................................................................................................ 355.1 Determining Surface Roughness ................................................................................. 355.2 Multipath ..................................................................................................................... 365.3 Terrain Loss................................................................................................................. 47
5.3.1 Ground .......................................................................................................... 485.3.2 Vegetation ..................................................................................................... 49
5.4 Knife Edge Diffraction ................................................................................................ 506....Discussion............................................................................................................................... 58
6.1 Scenario Preparation.................................................................................................... 586.2 Scenario Execution...................................................................................................... 59
References ..... ............................................................................................................................... 62

vi DRDC Ottawa TM 2010-082
Annex A .. Signal Flow in an RF Engagement .............................................................................. 67Annex B .. Surface Roughness and the Rayleigh Criterion........................................................... 68Annex C .. Terrain Bounce Geometry with a Spherical Earth....................................................... 70Annex D .. Determination of a Synthetic Diffraction Point........................................................... 74List of Abbreviations, Acronyms, Initialisms & Symbols ............................................................ 77

DRDC Ottawa TM 2010-082 vii
List of Figures
Figure 1: The electromagnetic spectrum. ........................................................................................ 1
Figure 2: Conceptual layout of the Karma simulation architecture................................................. 2
Figure 3: Elements which can contribute to an RF engagement. .................................................... 3
Figure 4: Target signal timing diagram for EO/IR (passive) and RF (active) sensors. ................... 4
Figure 5: Radiation zones for a radar operating at 10 GHz with a 3.0 m dish antenna. .................. 5
Figure 6: Optical and EM lines of sight for the earth. ..................................................................... 9
Figure 7: Temperature as a function of altitude for the atmosphere.............................................. 10
Figure 8: Pressure as a function of altitude for the atmosphere. ................................................... 10
Figure 9: Water vapour pressure as a function of altitude for the atmosphere. ............................. 11
Figure 10: Refractivity as a function of altitude for the atmosphere. ............................................ 11
Figure 11: EO and RF lines of sight for an expanded earth. ......................................................... 12
Figure 12: Absorption rate as a function of frequency for molecular oxygen and water vapour. . 14
Figure 13: Cloud attenuation coefficient as a function of frequency for different temperatures. . 17
Figure 14: log10(kH) as a function of frequency............................................................................. 19
Figure 15: H as a function of frequency....................................................................................... 19
Figure 16: log10(kV) as a function of frequency............................................................................. 20
Figure 17: V as a function of frequency....................................................................................... 20
Figure 18: The division of energy from a beam that illuminates the earth’s surface. ................... 22
Figure 19: Surface clutter can arise from vertical surfaces. .......................................................... 22
Figure 20: The radar footprint and resolution cell depth determine the surface clutter region ..... 22
Figure 21: The dependence of the backscatter coefficient of sea water on grazing angle............. 24
Figure 22: Backscatter coefficient as a function of grazing angle for different terrain types at 6.0 GHz. ...................................................................................................................... 24
Figure 23: Pett model sea backscatter coefficient as a function of frequency for a vertically polarized signal in sea state 2 conditions at different grazing angles.......................... 26
Figure 24: Pett model sea backscatter coefficient as a function of frequency for a vertically polarized signal at a grazing angle of 1.0 degres in different sea state conditions...... 26
Figure 25: The impact of atmospheric effects depends on their location relative to a radar resolution cell (purple). ............................................................................................... 27
Figure 26: Different cloud types.................................................................................................... 30
Figure 27: Normalized RCS of a single chaff strip averaged over all possible orientations [32]. ............................................................................................................................. 31

viii DRDC Ottawa TM 2010-082
Figure 28: The location of chaff relative to a radar resolution cell. .............................................. 33
Figure 29: Radar signals can reach a target via multiple paths. .................................................... 37
Figure 30: Fresnel zones between a radar and a target. ................................................................. 38
Figure 31: Maximum width of the first Fresnel zone as a function of target range. ..................... 39
Figure 32: Required mainlobe beam width for a radar signal to reach widest part of the first Fresnel zone as a function of target range................................................................... 39
Figure 33: The geometry of a ship radar tracking a low flying target. .......................................... 41
Figure 34: Signal strength as a function of target range for a target 30 m above the sea surface at three different frequencies....................................................................................... 41
Figure 35: Signal strength envelope for the three curves in Figure 34.......................................... 41
Figure 36: Reflection coefficient magnitude for sea water at three different frequencies for vertical and horizontal polarizations. .......................................................................... 43
Figure 37: Reflection coefficient phase for sea water at three frequencies for vertical and horizontal polarizations. .............................................................................................. 43
Figure 38: Reflection coefficient magnitude for different materials: vertical polarization. .......... 44
Figure 39: Reflection coefficient magnitude for different materials: horizontal polarization....... 44
Figure 40: Radar beams project different areas when reflected off flat and curved surfaces........ 45
Figure 41: Propagation factor as a function of elevation angle for a radar located 10 m above the sea.......................................................................................................................... 47
Figure 42: Rough surfaces can prevent a beam from fully forming by blocking parts of the lobe.............................................................................................................................. 48
Figure 43: Loss due to vegetation as a function of frequency for 4 different vegetation depths... 49
Figure 44: Diffraction of RF waves through an aperture in a barrier. ........................................... 50
Figure 45: Fresnel diffraction geometry for a single-sided barrier................................................ 51
Figure 46: The effect of obstacle location on the sign of the Fresnel-Kirchhoff diffraction parameter..................................................................................................................... 52
Figure 47: Diffraction loss as a function of the Fresnel-Kirchhoff parameter for a single edged diffractor...................................................................................................................... 54
Figure 48: Diffraction around an extended obstacle. .................................................................... 55
Figure 49: Three methods to determine diffraction loss around multiple obstacles...................... 57
Figure 50: Far-field radiation pattern for a sin(x)/x antenna. ........................................................ 60
Figure 51: The effect of orientation on observed polarization. ..................................................... 61
Figure A-1: Generic layout of an RF propagation model.............................................................. 67
Figure B-1: Reflection of a wave by a textured surface. .............................................................. 68
Figure B-2: Signals must differ in phase by at least /2 to be resolvable....................................... 69

DRDC Ottawa TM 2010-082 ix
Figure C-1: Geometry of target tracking above a spherical earth. ................................................ 71
Figure D-1: The geometry of diffraction around two knife edges by a synthetic obstacle. ......... 75

x DRDC Ottawa TM 2010-082
List of Tables
Table 1: Characteristics of the ITU standard atmosphere. .............................................................. 9
Table 2: The eight most common atmospheric gases by volume. ................................................. 14
Table 3: Typical moisture content values for various fog density................................................. 17
Table 4: Radar reflectivity coefficients for different types of rain. ............................................... 29
Table 5: Representative parameters of a chaff cloud..................................................................... 33
Table 6: The Douglas sea state table. ............................................................................................ 36
Table 7: Electrical characteristics of common environmental surfaces. ....................................... 42
Table 8: Components of a standardized parameter list for RF simulations................................... 58

DRDC Ottawa TM 2010-082 1
1 Introduction
The purpose of this document is to identify factors which critically affect the propagation of radio waves through the atmosphere. A variety of Radio Frequency (RF) modelling tools such as the Advanced Refractive Effects Prediction System [1] and the Matlab RF toolbox are commercially available. However, they are not necessarily appropriate in their current form to be used within DRDC’s Karma simulation framework. In fact, the modelling and simulation designer ought to have at least a basic understanding of the physics of RF propagation and an appreciation of the limits of these models. This document is intended, therefore, to provide the Karma project with a single source of the basic information necessary to reproduce a realistic RF environment for the purpose of modelling and simulation.
1.1 Background
The Karma modeling environment was developed by DRDC Valcartier in the early 2000’s as a flexible framework which allows for diverse models to interact within various configurations for Electronic Warfare (EW) simulation [2]. Every model used in Karma is written to a rigid interface specification. This is the key feature of the framework as it allows any model that has been written to the Karma standard to interact with any other Karma-compliant model, which has the added benefit of promoting the reusability of models. Karma was developed without any inherent restrictions with regard to the type of environment to be simulated. However, as it was developed at DRDC Valcartier, the initial environment was based in the Elctro-Optic/Infra-Red (EO/IR) portion of the Electro-Magnetic (EM) spectrum (Figure 1). As the agency experts in RF transmission, DRDC Ottawa has been tasked with formulating the means to extend the Karma framework to encompass the RF portion of the spectrum as well.
The structure of a Karma simulation framework is built around the concepts of a simulation manager, SimulationEvironment (SE), a theatre and autonomous models referred to as base entities (see Figure 2) [3]. The theatre represents the three dimensional space where the simulation takes place. All of the base entities reside within the theatre and their motions are restricted to this space. Also contained within the theatre is an environment model which governs
Figure 1: The electromagnetic spectrum.

2 DRDC Ottawa TM 2010-082
Figure 2: Conceptual layout of the Karma simulation architecture.
the transmission of signals within the theatre. Simulations are managed by the SE which is external to the theatre. The main tasks of the SE are to coordinate and manage the simulation, including the passing of information from one model to another. In the case of EO warfare, the sources will provide a transmittance to the SE which will then compute the irradiance with the help of the environment model and report this data, either as a mean value or as a spectrum, according to the requirement of the requesting sensor model. The focus of this document, therefore, is on the expansion of the environment model to include the RF portion of the electromagnetic spectrum.
Every effort has been made to reproduce model equations as they appear in the supporting references. However, symbols have been changed, without annotation, where necessary to maintain the naming convention used throughout this document. Additionally, the backscatter coefficient models cited here generate estimates of cross-section magnitudes relative to 1 m2 with the opposite sign than is normally used (e.g. for a 0.1 dB cross-section, the cited models produce values of 10 dBm2 rather than -10 dBm2.) This has been changed to adhere to the gain convention used in this document in which losses are treated at negative gains. This is explicitly mentioned in other documentation and implicitly assumed to be understood hereafter in this document.
1.2 Document Scope
Realistic engagements in the RF spectrum are rarely simple interactions between a radar and a target as there are many external factors which can affect the transmission of signals at these frequencies. Figure 3 shows some of the contributing elements for the case of a ground based radar tracking an aircraft. Besides the radar itself, ground clutter due to terrain and foliage, atmospheric attenuation, absorption and backscatter due to weather and the presence of external interference sources can all have significant impact on an encounter. The target aircraft itself will have a Radar Cross-Section (RCS), and will likely carry its own radar, a Radar Warning Receiver

DRDC Ottawa TM 2010-082 3
Figure 3: Elements which can contribute to an RF engagement.
(RWR), a jammer and a chaff dispenser. The scope of this document is limited to the physics of propagation of RF signals in an external environment. That is, only those factors identified in boxes in Figure 3 are considered. A general implementation scheme for these factors appears in Annex A.
Radar models are expected to provide their own processing of pulse information and apply antenna patterns, receiver gain (including radome effects), filtering, Doppler shift due to the radar’s own motion and any internal losses. The nominal unit, therefore, is that of the electric field density (W/m2) rather than power (W). However, the practical implementation of RF propagation modelling within Karma may require the SE to have access to some factors that would normally be associated with a radar model. This is discussed in Section 6.
In general, this document follows the Recommendations of the International Telecommunication Union (ITU) [4]. Founded in 1865 as an independent organization to regulate international radio and telecommunications1, it was subsumed by the United Nations as a special agency in 1950. The standards established by the ITU (known as Recommendations) carry a high degree of formal recognition within the international community. The environmental models provided by the ITU are empirically based rather than theoretically derived.
1.3 RF Transmission Considerations
There are two main differences between EO/IR and RF interactions. The first, transmission mechanics, is the subject of this document. The existence of sensor sidelobes is but one example of factors which are not present for EO/IR propagations but can significantly impact RF signals. These are discussed in subsequent sections.
1 The ITU is the second only to the Rhine Commission (1815) as the oldest international organization still in existence.

4 DRDC Ottawa TM 2010-082
Figure 4: Target signal timing diagram for EO/IR (passive) and RF (active) sensors.
The second difference is that RF sensing is generally both active and coherent in nature. (Exceptions include radar warning receivers, anti-radiation missiles and the emerging class of passive RF tracking systems. Nevertheless, such systems still rely upon the presence of an active RF source.) In the Karma framework, passive tracking systems strobe the SE when they want to receive input. The SE then compiles the picture and presents the information to the requesting sensor. This is possible because targets continually emanate energy in these bands and therefore there is a continuous target signal available to be tracked, as shown in Figure 4(a). Note that signals are received when the “Receive Interrupt” signal is low.
In the case of sensing with active emissions, target signals are the reflections of energy originating from a signal source. Active detection and tracking can provide greater capability than that of passive sensors through the use of matched filters to eliminate unwanted signals such as noise. This increases the sensitivity of the receiver. Additionally, the target range can be determined through time delay analysis. The reader is referred to standard radar reference texts such as Skolnik [5] or Stimson [6] for more information on radar technology and methods.
Signals arising from active emissions are received during the inter-pulse transmission period, a time span referred to as the Pulse Repetition Interval (PRI). The reciprocal of the PRI is the Pulse Repetition Frequency (PRF). For low PRF radars, target signals received by a radar are nominally associated with the most recently transmitted pulse. However, this is not the case for medium and high PRF radars, as illustrated in Figure 4(b). Here, target returns are shown arriving at the receiver before, during and after the transmission of the subsequent pulse. Information arriving during a transmission period (when the receiver interrupt signal is high) is lost.
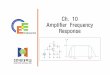
Antenna radiation patterns are divided into four zones: the reactive near-field, the near-field, the transition field and the far-field. All RF systems (both transmission and sensing) will be assumed to be operating under far-field conditions where the antenna pattern is fully formed. This is where the antenna gain is only a function of angle and where both electric and magnetic fields of the radiation are perpendicular to each other and to the direction of travel for the wave front and so free space loss applies. The distance threshold from the antenna to the far-field, thff, is given by:

DRDC Ottawa TM 2010-082 5
Figure 5: Radiation zones for a radar operating at 10 GHz with a 3.0 m dish antenna.
2
2 dth ff (1)
where d is the length of the largest dimension of the antenna and is the wavelength of the transmission. By way of illustration, Figure 5 shows the location of the various field zones for a radar operating at 10 GHz with a 3 m dish antenna, with the far field beginning at 1.8 m. In the case of a long range search radar operating at 3 GHz with a 10 m dish antenna, the onset of the far-field is pushed out to 600 m.
One final comment is in order here. The loss factors discussed in Sections 2 to 5 are one-way losses. RF signals propagating from a radar to a target and then back to the radar are subject to these losses in both directions.
1.4 Document Layout
This document is organized into four sections. Section 1 provides the background and scope of the document. Section 2 describes the radar range equation and the corresponding free space loss. Section 3 outlines the various effects that the atmosphere can have on RF signals. Section 4 covers different forms of clutter. Section 5 details different ways in which terrain can impact RF propagation. Finally, Section 6 discusses the practical aspects of implementing the mathematical relations within the Karma framework.

6 DRDC Ottawa TM 2010-082
2 Free Space Loss
As mentioned by Seybold, path loss is the most significant factor in determining radar detection due to its magnitude relative to internal receiver gains and losses [7]. Path loss is comprised of both Free Space Loss (FSL) and environmental losses. FSL describes the natural spherical spreading of EM waves and the corresponding decrease in amplitude of a wave as it propagates away from its source. All external contributions to amplitude reduction (i.e. losses), including those arising from the propagation medium are considered to be environmental losses.
FSL was first reported by Friis [8] as:
22dAA
PP tr
t
r (2)
where Pr is the power received by the radar, Pt is the transmitted power, Ar and At are the effective antenna areas of the receive and transmit antennas, respectively, d is the distance the wave travels and is the wavelength of the transmission. Equation (2) is the basis for the radar equation:
LrAGPP rt
r1
4 22 (3)
where G is the gain of the antenna, is the radar cross-section of the target, Ar is the physical size of the receive antenna, r is the range from the radar to its target (identical to d in equation (2)), and L is the total propagation loss due to factors other than FSL. The physical size of an antenna is related to its gain through the following relation:
2
4 rAG (4)
Equation (3) can then be re-written as:
2
2
22
411
4 rLGPP t
r (5)
which separates the equation into the contributions from (left to right) the radar, target, environment and FSL. Mathematically, FSL is denoted as LFS which is given by:

DRDC Ottawa TM 2010-082 7
241r
LFS (6)
It should be noted that the FSL term in equation (5) represents a two-way loss, as indicated by the value of the exponent. FSL is sometimes defined to include the 2 term which makes the loss unitless. However, this factor is a function of the sensor rather than the dissipation of the signal energy and so is best left out of the FSL term.
FSL can be taken as the general baseline for simulations in a benign environment (L 1). However, the nature of the situation may preclude the use of FSL and/or require additional corrective factors. These cases are discussed in later sections.

8 DRDC Ottawa TM 2010-082
3 Atmospheric Effects
There are three effects that arise from EM waves traveling through the atmosphere: refraction of the signal, attenuation by absorption of the wave by the atmosphere and scattering of the wave by weather. While the magnitude of each mechanism is dependant upon local atmospheric conditions (temperature, pressure, etc.) they are independent of each other.
3.1 Atmospheric Refraction
The speed at which radio waves propagate through a material is determined by the physical composition of the material. The properties of the atmosphere are known to vary with altitude, and hence, so does the atmosphere’s index of refraction [9]. As a result, EM waves bend downwards from their initial direction of travel as illustrated in Figure 6. One consequence of this is that targets which seem to lie in the direction of the antenna (black line) actually lie along the RF propagation path (blue line). A second effect is that radars are able to see beyond the visible (i.e. EO) horizon due to the curvature of the earth.
The radius of curvature for the EM wave, , is equal to the rate of change in the height above the ground for the EM wave, h, as a function of the index of refraction, n:
dndh
(7)
with positive. Following the ITU prescription, the index of refraction can be described as [10]:
6101 Nn (8)
where N is the refractivity of the atmosphere. The refractivity, as a function of altitude, can be computed as follows:
hThhP
hThN 48106.77
(9)
where T is the absolute temperature (K), P is the total atmospheric pressure (hPa) and is water vapour pressure (hPa). The ITU divides the globe into three zones: low latitude (<22o), mid latitude (22o to 45o) and high latitude (>45o) [10]. Figure 7 to Figure 10 display the temperature, atmospheric pressure, water vapour pressure and refractivity as a function of altitude for the various zones. The low latitude curves are identical for both summer and winter conditions and so only one curve is shown. The ITU standard atmosphere (blue line) represents an average of the

DRDC Ottawa TM 2010-082 9
Figure 6: Optical and EM lines of sight for the earth.
five other conditions and so can be used when specific knowledge of the environment is lacking [11]. The upshot of these curves is that the variation in the refractivity of the atmosphere is very small across all latitudes. The computations that follow in this section shall therefore use standard atmospheric data.
For a standard atmosphere, refractivity decreases exponentially with height:
0/0
HheNN (10)
where H0 is 7.35 km. Substitution of equations (8) and (10) into equation (7) yields:
16/
0
0 1010 kme
HN
dhdn Hh (11)
Using the values in Table 1, dn/dh is -42.9×10-6 for a standard atmosphere at the ITU suggested elevation of 1 km.
The analysis of wave propagation and target ranging is difficult with curved ray paths such as the one shown in Figure 6. However, it is possible to effectively make the RF signal path straight by using an equivalent earth radius, Req, rather than the true earth radius of R = 6370 km, as illustrated in Figure 11. The value of Req is computed by:
Table 1: Characteristics of the ITU standard atmosphere.
PARAMETER VALUE PARAMETER VALUE
T 288.15 K 9.37 hPa
P 1013.25 hPa N0 315 N-units

10 DRDC Ottawa TM 2010-082
Figure 7: Temperature as a function of altitude for the atmosphere [10].
Figure 8: Pressure as a function of altitude for the atmosphere [10].

DRDC Ottawa TM 2010-082 11
Figure 9: Water vapour pressure as a function of altitude for the atmosphere [10].
Figure 10: Refractivity as a function of altitude for the atmosphere [10].

12 DRDC Ottawa TM 2010-082
Figure 11: EO and RF lines of sight for an expanded earth.
111RReq
(12)
For a standard atmosphere, Req = 8360 km. It is also useful to define the ratio of Req to R :
RR
k eq (13)
For a standard atmosphere, k = 1.31 4/3, which gives rise to the common “four-thirds earth model” terminology. By using Req it is now easy to determine the direct distance, r, to the radar horizon for a radar at an elevation of h km. Following the geometry indicated in Figure 11:
222
222
2 hhRrhRrR
eq
eqeq (14)
Assuming a maximum radar altitude of 15 km (~51 kft), h << Req, and so equation (14) can be simplified to:
hRr
hRr
LOS
eqRF
2
2 (15a)
(15b)
The ratio of the EM and LOS horizons, therefore, is k . A special case is when equals R .When this happens, the EM wave bends towards the earth at the same rate as the earth’s curvature and so Req = .

DRDC Ottawa TM 2010-082 13
The atmospheric property curves shown in Figure 7 to Figure 10 will always result in the downward curvature of EM waves as illustrated in Figure 6. It should be noted that these curves represent the average of measurements taken over years in diverse locations and so may not accurately reflect local conditions of particular scenarios of interest. In some cases, the direction of curvature may be away from the earth, an effect known as sub-refraction. (Mirages are an example of this effect.) In other cases, the curvature may be greater than predicted by standard atmospheres, which is referred to as super-refraction. Finally, it should be noted that the atmosphere is not homogeneous but rather a stacking of different strata. It is this aspect of the atmosphere that allows for ducting to occur. EM waves entering a duct are continuously refracted away from the boundaries to the center of the duct. This causes the energy to be more focussed than would be the case for FSL and greater detection ranges can occur. This effect can be captured by using a (1/r) rather than a (1/r2) dissipation factor while the wave is within the duct.
3.2 Atmospheric Absorption
Atmospheric attenuation of electromagnetic waves occurs when the individual particles that comprise the atmosphere absorb photons of energy which allow them to go into excited states. The allowed energy levels of atoms and molecules are regulated by quantum theory, and so, for a particular material, certain photon frequencies have a strong chance of being absorbed while others have a lower likelihood of being absorbed. These frequencies are referred to individually as spectral lines and collectively as the absorption spectrum of the material.
As with other forms of penetration loss, the rate at which photons are absorbed is dependant upon the intensity of the photon beam. For a given path length, the ratio of the number of photons incident on, to the number of photons exiting from (i.e. not absorbed) a section of material is constant. That is, the fractional loss per unit length is constant. Therefore the corresponding loss in intensity due to atmospheric attenuation rate is expressed in dB/km. The atmospheric absorption loss, Latm, is therefore given by:
dBrL atmatm (16)
where atm is the atmospheric absorption rate and r is the distance in km that the wave travels.
Table 2 provides a list of the eight largest components by volume of the U.S. Standard Atmosphere as reported by the CRC Handbook [12]. The four most common gases (the left hand side of the table) account for 99.99% of the atmosphere. The volume fractions of the next four most common gases are so small that they must be listed in parts-per-million rather than in percent. The U.S. Standard Atmosphere model contains no water vapor and assumes all gaseous components to be homogeneously mixed. Since gases behave independently when mixed, the atmospheric absorption rate can be expanded as:
kmdBwCOAroNatm /222
(17)
where w denotes the absorption rate of water vapour. It may be argued that water vapour represents humidity and therefore ought to be treated as weather. However, it has been included


DRDC Ottawa TM 2010-082 15
result, argon displays no dipole moment to couple to the electromagnetic wave and so has no noticeable effect. Carbon dioxide is a linear molecule and so it too has no dipole moment and so can also be neglected. Finally, water has a strong dipole moment and so couples easily to electromagnetic waves. Thus, equation (15) reduces to
kmdBwoatm / (18)
where O is understood to refer to molecular oxygen and thus the subscript ‘2’ has been dropped.
A well-established means of calculating the attenuation of RF waves by the atmosphere is provided by the ITU in [14]. For a given frequency, the resonance of that frequency with each line in the absorption spectrum for both the molecular oxygen and water vapour spectra are computed and summed with the results shown in Figure 12. The method is sufficiently complex to preclude computation in real time. (The ITU list includes 48 absorption lines for oxygen and 35 for water, spanning almost 2 GHz.) As atmospheric conditions are unlikely to change during the course of an engagement, it should suffice to use the ITU method to populate an attenuation look-up table for use by the simulation. The data shown in Figure 12 are tabulated elsewhere [15].
3.3 Weather Attenuation
The two most important forms of weather from an attenuation perspective are clouds (including fog) and rain. Collectively, these are referred to as hydrometers since they are comprised of water. The effect of dust on RF signals is a function of its moisture content and so can be treated similar to rain, but with a rain rate adjusted to reflect the amount of moisture. Wind does not affect RF propagation except for transport of hydrometers into and out of the transmission space. Clouds are composed of as very dense water vapour unlike rain, which is an amalgamation of individual scatterers similar to chaff. As a result, the mathematical description of the scattering is different for these two forms of atmospheric moisture.
Unlike the atmosphere which attenuates the intensity of an RF wave through absorption of the wave’s photons, weather scatters the photons away. This is because the particles are large (relative to the atomic scale) and thus interact with the wave as a local medium. The computation of weather attenuation loss is similar to that of atmospheric loss, namely:
dBrL (19)
where is the absorption rate and r is the path length through the weather. If the weather is localized, the weather path length will be less than the target range. This is illustrated in Figure 25 which is located on page 27 in Section 4.1.

16 DRDC Ottawa TM 2010-082
3.3.1 Clouds
The absorption rate of a cloud (which includes fog), c , is a function of the concentration of water within the cloud and the resonance between the transmission frequency and the permittivity of water, which is a relatively complex relation. According to the ITU model for cloud (fog) attenuation, the absorption rate is given by [16]:
kmdBMKlf / (20)
where M is the liquid moisture density of the cloud bank in (g/m3) and Kl is the attenuation coefficient of the cloud. Kl can be computed using:
321819.0
mg
kmdBfKl (21)
where f is the frequency of the RF signal, is given by:
2(22)
where ' and are the frequency dependent real and imaginary components of the complex permittivity of water. They can be determined using:
22
220
1
97.1
1
48.5
1
97.1
1
48.551.3
s
s
p
o
p
sp
fff
f
fff
ff
ff
ff
f (23a)
(23b)
where 0 is given by:
13003.1036.770
T
(24)

DRDC Ottawa TM 2010-082 17
Figure 13: Cloud attenuation coefficient as a function of frequency for different temperatures [16].
with T being the prevailing atmospheric temperature in degrees Kelvin while the principle and secondary relaxation frequencies are:
1500590
29414209.20 2
s
p
f
f (25a)
(25b)
Table 3 lists values of M for fog as recommended by the ITU. These values are appropriate for clouds as well. Figure 13 shows the frequency dependent of the attenuation coefficient Kl for selected temperatures. The ITU recommends that for clouds a temperature of 273.15 K should be used [16].
Table 3: Typical moisture content values for various fog density.
DENSITY VISIBILITY M (g/m3)
Medium 300 m 0.05
Thick 50 m 0.50

18 DRDC Ottawa TM 2010-082
3.3.2 Rain
Just as the attenuation due to clouds is dependent upon the water density of the cloud, the attenuation due to rain depends upon the characteristics of the rain. Relevant factors include droplet size, density and rain rate. Although the values of all three parameters are interlinked, only rain rate is easily measured. The specific ITU rain attenuation model, therefore, is based solely on rain rate [17]. The model gives the absorption rate for rain as:
kmdBRRkR / (26)
where RR is the rain rate in mm/hr, while k and are the regression coefficients of the model.3
The ITU model provides formulas to calculate the values of k and as a function of frequency, polarization and transmission elevation angle. In particular:
2coscos
2coscos
221
221
VVHHVVHHk
VHVH
kkkk
kkkkk (27a)
(27b)
where is the elevation angle of the radar beam, is the polarization tilt angle, and XH and XV
are the regression coefficients for horizontal and vertical polarizations with X as either k or .The value of is either 0, /4 or /2 for horizontal, circular or vertical polarizations, respectively. The frequency dependence of the regression coefficients are shown in Figure 14 to Figure 17. The data displayed in these figures are tabulated elsewhere [15].
The main ITU model for rain attenuation applies an extra correction known as the distance factor to equation (26) [18]. This factor is necessary for the analysis of communications under maximum rain rates for the determination of the reliability and expected maximum range of a link. Since the main purpose of the ITU is the standardization of international communications, the maintenance of such links under extreme weather conditions is highly relevant. EW simulations, however, explore the specific conditions required to break a radar link rather than assess the performance of a link against standardized weather distributions [19]. The distance factor is therefore not relevant to Karma applications and so the specific model has been presented.
3 The ITU model specifically uses the terms k and . Bars have been added to these terms to distinguish them in this document from the effective earth radius ratio and grazing angle, respectively.

DRDC Ottawa TM 2010-082 19
Figure 14: log10(kH) as a function of frequency [17].
Figure 15: H as a function of frequency [17].

20 DRDC Ottawa TM 2010-082
Figure 16: log10(kV) as a function of frequency [17].
Figure 17: V as a function of frequency [17].

DRDC Ottawa TM 2010-082 21
4 Environmental Effects
It is impossible for radar transmissions to illuminate only targets of interest; they also interact with various parts of the physical environment. This gives rise to clutter, which is defined as any unwanted radar return. While clutter can occur at any range and at any angle, it is only the clutter in the vicinity of a target(s) that is important. Since clutter is a response to a radar’s transmission, it is coherent from pulse to pulse and therefore will pass through many of the radar receiver’s filters. This means that the impact of clutter is potentially more significant than that of noise. Therefore, EW simulations must include clutter to be representative of the real world.
The power in the radar arising from clutter, Pc, is given by:
LR
CGPP t
c1
44
2
22
2
(28)
This is precisely the same as in equation (3) but with the target radar cross-section replaced by the parameter C, which is the clutter cross-section. The clutter cross-section is the sum of the clutter signals from all of the scatterers within the clutter region. This can be computed as either the sum of discrete elements or from a statistical average over the clutter region. The two main sources of clutter are the earth (surface clutter from the terrain and sea) and the atmosphere (volume clutter). These are described separately below.
The discussions that follow are presented in terms of mainlobe clutter only. However, it is quite possible for signals to enter through a radar’s sidelobes. The mechanics of sidelobe clutter are the same as that of mainlobe clutter; only the associated antenna gains are different (i.e. lower).
4.1 Surface Clutter
When a radar beam hits the surface of the earth (either terrain or the sea) the beam is split into four paths as shown in Figure 18. A small portion of the energy is absorbed by the surface and the rest is reflected back into the atmosphere. Some of the reflection is specular, like that of a mirror, some is diffuse and the rest returns along the initial transmission path. This last reflection type is known as backscatter and is the basis for ground imaging radar. For all other radars, this is the source of surface clutter. While surface clutter is normally associated with radars beams using negative elevation angles, mountains can also be a source of surface clutter as indicated in Figure 19.
For surface clutter, the clutter region is an area. The size of this area depends on the beam footprint on the earth and the depth of the radar’s resolution cell as indicated by the purple regions in Figure 20. Since the impact of clutter is the possible suppression of target signals, only clutter falling within the same resolution cell as the target is of concern. Figure 20(a) illustrates the case of a wide pulse incident upon the earth. In this case, the resolution cell is long enough to illuminate the entire radar footprint, which is shown in Figure 20(c). This is referred to as beam-limited clutter. The width of the footprint is R Az where R is the range to the center of the foot-

22 DRDC Ottawa TM 2010-082
Figure 18: The division of energy from a beam that illuminates the earth’s surface.
Figure 19: Surface clutter can arise from vertical surfaces.
Figure 20: The radar footprint and resolution cell depth determine the surface clutter region

DRDC Ottawa TM 2010-082 23
print and Az is the effective beam width in radians. The length of the foot print is R El divided by the sin of the grazing angle, . According the Blake, the appropriate values of Az and El are approximately 75% of the 3-dB beamwidths in azimuth and elevation as this takes into account the spreading of the beam energy along the return path [20]. Figure 20(b) shows the case when the resolution cell is not deep enough to illuminate the entire foot print. In this case, referred to as range-gate limited clutter, the width of the clutter region remains unaffected, but the depth is restricted to the projected area of the range cell onto the ground. The size of the clutter region for surface clutter is therefore defined as:
2
sin4;
cos2min m
RcR ElAzS (29)
where the extra factor of /4 in the second term accounts for the rounded shape of the clutter region shown in Figure 20(c). The ground clutter signal is then:
20 mC S (30)
where 0 is referred to at the backscatter coefficient. The normal units for backscatter coefficients are square-meters-per-square-meter and so are expressed in dB.
The four factors that determine the value of 0 are grazing angle, polarization, surface texture and transmission wavelength [21]. Figure 21 indicates the relationship between 0 and the grazing angle for seawater. Three regions are readily apparent: the low-angle region, the high-angle region and a plateau region between them.
The low angle region shows a strong correlation between 0 and the grazing angle. Here, the radar footprint is at its largest, but the surface is considered to be smooth and so the reflection is mostly specular. This zone extends from zero degrees until the surface is no longer considered to be smooth, which occurs when the signal return from the top-most layer to the surface texture is discernable of that from the bottom-most layer. The angle at which this occurs is denoted R.Using the Rayleigh criterion which states that two signals can only be resolved if they are separated by at least one quarter of a wavelength, R can be determined using:
sR h8
sin 1(31)
where is the wavelength of the signal and hs is the mean height of the surface texture. A derivation of equation (31) is provided in Annex B. Rougher surfaces produce stronger signals than do smooth surfaces in this region due to the diffuse nature of the reflectivity. In addition, smaller wavelengths produce larger backscatter since they are more likely to scatter from terrain features compared to longer wavelength signals.

24 DRDC Ottawa TM 2010-082
Figure 21: The dependence of the backscatter coefficient of sea water on grazing angle.
Figure 22: Backscatter coefficient as a function of grazing angle for different terrain types at 6.0 GHz [27].

DRDC Ottawa TM 2010-082 25
Reflection in the high angle region is mostly specular. While the radar footprint is smallest in this region, the physical separation between the backscatter and specular reflections approaches zero and so the response increases with angle. In contrast with the low angle region, smooth surfaces produce stronger signals in the high angle region as rough surfaces will scatter more of the available signal away from the radar. The onset of the high angle region is around 60 degrees, which is consistent for most surface conditions.
In the plateau region, the backscatter coefficient is a mixture of both diffuse and specular reflection, moving from the former to the latter as the grazing angle increases. The nature of the scattering is such that 0 shows little variation with grazing angle in this region. The scattering coefficient curves for land are similar to that of the sea. However, the slope of the low angle region is not as large and that of the plateau region is larger so they become nearly indistinguishable, as illustrated in Figure 22. A quick inspection of Figure 22 suggests that terrain type also plays a factor in the amount of backscatter produced.
Backscatter coefficients are difficult, if not impossible to determine mathematically and so they must either be measured or approximated with an average value based on some distribution. The reader is referred to general discussions on the nature of clutter for more information [22][23][24]. In lieu of a tractable theoretical approach, three models based on empirical data are described.
The first, by Petts, gives the backscatter coefficient in dBm2 for the sea as [25]:
dBfI3132.0
log376.3 100 (32)
where f is the transmission frequency in GHz and both I and are the model parameters which are functions of the grazing angle and sea state, up to sea state 5. Figure 23 shows the model’s output for a vertically polarized signal in sea state 2 conditions at different grazing angles and Figure 24 shows the model’s output for a vertically polarized signal at a grazing angle of 1.0 degree for different sea state conditions. For ease of comparison, the green curve in each figure represents the same condition. The values of I and as functions of grazing angle, polarization and sea state, as well as the output of the Pett model for a variety of conditions are documented elsewhere [15].
The second model is also for sea clutter and was produced by the NATO Anti-Air Warfare System Program Office and provides a number of look-up tables of reflectivity coefficients [26]. The model has a proven track record and is well regarded by a wide audience.
The third model was produced by the Georgia Institute of Technology (GIT) and gives the backscatter coefficient for terrain in dBm2 as [27]:
dBh
DCAs
B
10/1exp0 (33)

26 DRDC Ottawa TM 2010-082
Figure 23: Pett model sea backscatter coefficient as a function of frequency for a vertically polarized signal in sea state 2 conditions at different grazing angles [25].
Figure 24: Pett model sea backscatter coefficient as a function of frequency for a vertically polarized signal at a grazing angle of 1.0 degres in different sea state conditions [25].

DRDC Ottawa TM 2010-082 27
Figure 25: The impact of atmospheric effects depends on their location relative to a radar resolution cell (purple).
where hs is the thickness of the surface in centimetres. The model parameters A, B, C and D are defined for particular terrain types at specific frequencies. The terrain types include, in order of surface thickness: soil/sand, grass, crops, trees, and urban environments. The model also provides limited estimates for snow at 10 and 35 GHz. The values of A, B, C and D, as well as the output of the GIT model for different conditions are documented elsewhere [15].
4.2 Volume Clutter
Volume clutter is backscatter from volume scatterers such as rain that occur within the resolution cell of a radar and interfere with a target return. Only the radar reflective material within the resolution cell contributes to volume clutter. Outside the resolution cell, its impact is described in terms of attenuation of the radar signal as indicated in Figure 25. The volume clutter backscatter is determined using:
2mC V (34)
where V is the size of the resolution cell and is the volume backscattering density, which is expressed in (m2/m3). The volume of the resolution cell (the purple region in Figure 25) is the size of the elliptical cross section of the cell measured at its middle multiplied by its depth. That is:
32
8mRc
ElAxV (35)


DRDC Ottawa TM 2010-082 29
where n is the index of refraction of the medium, which in this case is the atmosphere. The nature of the atmospheric index of refraction is discussed in Section 3.1. Mahafza gives approximate values for as 0.93 for rain between 0oC and 20oC and 0.20 for ice, which would be appropriate for sleet and/or hail [28].
It is convenient to define Z, the radar reflectivity factor, as:
N
iidZ 6ˆ (39)
Practically speaking, Z is of little use because it cannot be measured directly. However, according to Skolnik, the radar reflectivity factor and the rain rate are related in the following way [29]:
bRRaZ (40)
where a and b are coefficients derived from fits to empirical data. When RR is expressed in mm/hr, Z will have units of mm6/m3. Intuitively, the form of equation (40) makes sense as light rains and mists are composed of small water droplets, whereas large droplets are associated with heavier rainfalls. Skolink provides coefficient values for three levels of rainfall and these are listed in Table 4.
Statiform precipitation is produced when warm and cold air meet. The warmer air (which will have a higher moisture content) is forced to move over the colder air to form sheet-like nimbostratus clouds which are dark grey and visually featureless. The altitude of such clouds generally does not exceed 2400 m. Orographic precipitation occurs when moist air is forced upwards by geographic land forms such as the coastal mountains of British Columbia. Such clouds are at altitudes of less than 2500 m and appear as bands of clouds or as thin wisps across the sky. Convective precipitation is the result of the earth’s warmth causing an updraft, bringing atmospheric moisture upwards to form cumulonimbus (puffy) clouds at altitudes ranging from 2000 to 16,000 m. These clouds produce heavy rains up to and including thunderstorms. Examples of these cloud types are shown in Figure 26.
Table 4: Radar reflectivity coefficients for different types of rain.
ASSOCIATED CLOUDS PARAMETERS PRECIPITATION CLASS Type Altitudes (m) a b gp
Stratiform Nimbostratus < 2400 200 1.60 7.03
Orographic Orographic < 2500 31 1.71 1.09
Convective Cumulonimbus 2000 – 16000 486 1.37 17.07

30 DRDC Ottawa TM 2010-082
Nimbostratus Orographic Cumulonimbus
Figure 26: Different cloud types.
Substitution of equations (37) to (40) into equation (36) provides the following equation for the volume clutter density:
321214, /10 mmRRfg b
pph (41)
where the subscript p refers to the precipitation class (s:stratiform, o:orographic, c:convective), gpis an amalgamation of constants (with values for rain listed in Table 4), f is the radar frequency measured in GHz and RR is the rain rate in mm/hr.
4.2.2 Biologics
Animals are another potential source of volume clutter as reflections from each creature can generate an undesired radar target. Admittedly, aircraft are unlikely to knowingly fly into regions with dense bird populations as the risk of catastrophic damage due to a bird strike is too great. However, this case is included here for completeness. The RCS of biologic reflectors (birds and insects) is given by Edde as [30]:
210log8.546 dBmwbb (42)
where wb is the weight of the bird (or insect). Assuming only one type of creature within the volume cell, using an average mass value results in an average RCS for each animal. The total biologic volume clutter density can then be computed by multiplying the average RCS by the animal density, :
32 / mmbb (43)

DRDC Ottawa TM 2010-082 31
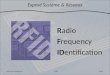
Figure 27: Normalized RCS of a single chaff strip averaged over all possible orientations [32].
4.2.3 Chaff
A chaff cloud is a collection of fibreglass strips coated with radar reflective material. The RCS of a single strip of chaff is frequency dependent, reaching its maximum value when the length of the chaff strip is one half of the wavelength of the radar. Mahafza gives a maximum RCS for a single strip as 0.88 2 dBm2 [31]. When averaged over all aspect angles and polarizations, the average RCS for a single chaff strip is commonly accepted to be:
22, 15.0 dBmic (44)
Kashyap and Louie have plotted the RCS of a single chaff strip averaged over all orientations and polarizations as a function of strip length, reproduced here with permission as Figure 27 [32]. In this figure, the cross-section and chaff length have been expressed in terms of radar wavelength to normalize the data with regard to radar frequency. The figure shows that for any radar wavelength, the average RCS of a chaff strip will depend on how much the strip resonates with the radar emission, undergoing several maxima and minima. The greatest resonances occur when the chaff is cut to a multiple of one quarter of the radar signal’s wavelength. (The maximums actually occur at chaff lengths approximately 2% less than multiples of a quarter radar wave-length due to coupling effects that are not important to this discussion.) From their findings, the average RCS for a single chaff strip is 0.19 2 dBm2 which is in keeping with values reported elsewhere [33].
Chaff is delivered by rockets which deploy hundreds of thousands of pieces of chaff to form a chaff cloud. While it is true that chaff is known to clump when being dispersed it is reasonable to presume a homogeneous distribution throughout the cloud. As chaff clouds develop the individual strips tumble and fall, taking on random orientations with respect to the radar. In order to

32 DRDC Ottawa TM 2010-082
determine the density of a chaff cloud it is therefore appropriate to treat each chaff strip as a sphere. The radius or such a sphere is given by:
22, mriic (45)
while the volume of each individual sphere is:
3,3
4 23
21
mV ici (46)
where equation (45) has been used.
For a cloud containing N pieces of chaff, the total volume and RCS of the cloud would be:
iN
iN
NNVV (47a)
(47b)
only when the cloud is one chaff sphere thick and viewed broadside. Kashyap and Louie state, using the Kepler conjecture, that a more representative chaff cloud volume, V0, is given by [32]:
30
18 mVNV i (48)
and show that for a spherical cloud, the total RCS of the cloud, 0, is given by:
2,
32
018 mN
ic (49)
Comparison of equations (36) and (49) indicates that the chaff density is:
32
18Nc (50)
Kashyap and Louie also provide representative value for an typical chaff cloud which are listed in Table 5. The striking feature is the difference in RCS between a loose ( N) and a tightly packed ( 0) chaff cloud. It is suggested that the lower value be used unless particular data is available.

DRDC Ottawa TM 2010-082 33
Figure 28: The location of chaff relative to a radar resolution cell.
There are two more aspects unique to chaff that must be considered for realistic simulation of EW engagements. The first is that chaff clouds are not static. They often appear as a result of external stimulation, take time to fully form and fall to the ground.5 The time dependence of a chaff cloud’s RCS as it blooms is given by:
ctc et 10 (51)
where tc is the time constant of the chaff bloom. Typical fall rates for chaff are 0.10 m/s at an altitude of 1.0 km, increasing to approximately 2.5 m/s at altitudes of 6.0 km and above [34].
The second aspect is the size and position of the chaff cloud to the radar resolution cell. If the size and location of the cloud is such that it is completely contained within the resolution cell, then equation (49) can be used. However, if part of the chaff cloud is outside the resolution cell, only the fraction of the cloud within the boundary of the cell will contribute to the volume clutter.
A further refinement to this is when a portion of the chaff cloud lies in between the radar and the resolution cell, as illustrated in Figure 28. As shown, only the chaff within the resolution cell (black) contributes to the volume clutter. Neither the chaff outside the beam width of the radar (red) nor the chaff behind the resolution cell (green) contributes to volume clutter. However, the chaff in front of the resolution cell (blue) does affect the situation as it will attenuate signals both entering the cell and returning to the radar. This decreases the amount of power incident upon any targets present within or behind the resolution cell.
Table 5: Representative parameters of a chaff cloud.
PARAMETER VALUE PARAMETER VALUE
N 4.0 × 108N 6000 m2
ic, 1.5 × 10-5 m20 9.95 m2
V0 24.1 m3c 6.63 × 105
5 Rain also falls but is continuously replenished whereas the amount of chaff is limited.

34 DRDC Ottawa TM 2010-082
Hayes provides the following formula for attenuation of radar signals due to chaff [35]:
mdBcc /2 (52)
When multiplied by the depth of the attenuation chaff cloud (blue), the result is the two-way loss for signals returning to the radar. The decrease in power for signals entering the cell is one half of this value. Recently, the theory of chaff attenuation has been revisited by Sherman who gives the following formula for the one-way attenuation rate due to chaff [36]:
mdBcc /655.0 2 (53)
which is 30% greater than the Hayes model.

DRDC Ottawa TM 2010-082 35
5 Terrain Effects
When a wave traveling in one medium encounters another medium, the result is either redirection and/or attenuation of the wave. A radar beam interacts similarly with the surface of the earth. While the word “terrain” is commonly understood to refer to ground only, it is used in this document as a generic term to refer to the earth’s surface, and so includes ground, vegetation and the sea. Particular terrain types are mentioned specifically when required throughout this document.
The parameter that determines the nature of the interaction between a radar beam and the earth’s surface is the terrain thickness [37]. For smooth surfaces, the only effect of significance is specular reflection which enables radar beams to interact with a target by bouncing off the ground in addition to direct path propagation, an effect known as multipath. For rough surfaces the terrain can partially interfere with the mainlobe of the radar, thereby preventing the beam from being fully formed as assumed in Section 1.3. Finally, terrain can be high enough to fully impede the direct transmission path an outcome referred to as terrain masking. These effects are discussed separately, below.
5.1 Determining Surface Roughness
Surface roughness is a function of the thickness of the surface texture, the wavelength of the radar transmission and the grazing angle [37]. The condition for a surface to be considered rough was given by equation (31) which is repeated here for convenience:
sh8sin 1 (31)
where is the grazing angle and hs is the thickness of the surface texture. The derivation of this relation is provided in Annex B. Ground texture data can be obtained from topographic maps. Vegetation depth is equal to the height of the foliage in the area. (In complex scenarios involving rolling forested hills, both effects must be taken into account.) Sea texture, on the other hand, is dynamic and is determined by the prevailing weather conditions.
The sea surface has historically been characterized by the Douglas sea scale [39]. While the World Meteorological Organization has recently redefined the sea scale table in terms of the Beaufort wind scale, the Douglas scale, provided in Table 6, remains valid for radar applications. Waves in the open sea are not of uniform height, and so, in the table, wave height refers to the average heights of the largest third of the waves present for each state. Mahafza gives the following formula for the root-mean-square wave height as a function of sea state, SS, [40]:
mSh Srms72.1046.0025.0 (54)
These values, along with the associated rough-surface grazing angle threshold (derived using equation (31)) appear in Table 6 to the right of the double barrier. Larger target distances result

36 DRDC Ottawa TM 2010-082
in smaller grazing angles, and so as an engagement develops, a surface can change from smooth to rough. Consider, for instance, the case of a ship with a radar 20 m above the surface tracking a sea skimming missile at an altitude of 10 m [41]. In this case, the sea will be considered to be smooth so long as the grazing angle is less than R. For sea state 4, this occurs at a target range of 26 km. Once the distance decreases below this value, the sea surface must then be considered to be rough.
5.2 Multipath
If the altitude of either the radar or the target is low enough, multipath can occur as depicted in Figure 29. This happens when a radar signal can reach a target via the direct path (blue arrow) and by being reflected by some object (red arrow), in this case the ground. This effect is particularly important for ships engaging low-flying targets such as sea skimming missiles.
Due to the curvature of the earth, the location of the reflection point G is not necessarily at the midpoint of the path. Thus, in general, r1 r2. The determination of the reflection point location and the magnitude of the grazing angle, , at the surface (which is not the same as the elevation angle of the radar beam, d) for a spherical earth is outlined in Annex C.
If the difference in length between the direct path (RTR) and reflected path (e.g. RTGR) is large enough, targets can appear twice on a radar display. For example, the target returns in Figure 4b can be generated either by four targets without multipath or by two targets with the two signals on the left due to the direct path and the two signals on the right due to a reflected path. It should be noted that the Doppler shift of a target viewed along the reflected path will be different than that observed along the direct path because the target will have a different radial velocity.
Table 6: The Douglas sea state table.
SEASTATE
DESCRIPTIONWAVE
HEIGHT (m) WIND
SPEED (kts) hrms
(m)R
(deg)
0 Calm (glassy) 0.0 0 0.025 8.63
1 Calm (rippled) 0 – 0.1 0 0.071 3.03
2 Smooth 0.1 – 0.5 0 – 6 0.177 1.22
3 Slight 0.5 – 1.2 6 – 12 0.329 0.65
4 Moderate 1.2 – 2.5 12 – 15 0.524 0.41
5 Rough 2.5 – 4.0 15 – 20 0.758 0.28
6 Very rough 4.0 – 6.0 20 – 25 1.028 0.21
7 High 6.0 – 9.0 25 – 30 1.332 0.16
8 Very high 9.0 – 14.0 30 – 50 1.670 0.13
9 Phenomenal > 14.0 > 50 2.039 0.11

DRDC Ottawa TM 2010-082 37
Figure 29: Radar signals can reach a target via multiple paths.
When the path length difference is small, the two target returns will interfere with each other. With reference to Figure 29, the difference in path length, , is:
2121 rrll (55)
with:
222,12,1 hrl (56)
For interference to occur, the difference in path length must be less than the depth of the resolution cell of the radar, ½c , (see Figure 25) which implies that h is small (i.e. h << r1,r2).This assumption allows equation (56) to be expanded to:
22,1
2
2,12,1 21
rhrl (57)
Thus, equation (55) becomes:
21
2 112 rr
h(58)

38 DRDC Ottawa TM 2010-082
Figure 30: Fresnel zones between a radar and a target.
and the phase difference between the two paths, , is given by:
21
2122
rrrrh
(59)
The interference will be strongest when = N , which will occur when:
21
21
rrrrNh (60)
Solutions of equation (60) define a series of unique, concentric ellipsoids about the radar and each target. These are known as Fresnel zones. Figure 30 shows two dimensional projections of the different Fresnel zones for a single radar/target pairing. It should be noted that the size and orientation of the Fresnel zones are dynamic and will change as the radar and/or target move. When N is odd (red lines in Figure 30), the interference will be destructive, but when N is even (black lines), the interference will be constructive.
The widest point of a Fresnel zone occurs at the midpoint of the zone where r1 = r2. Figure 31 plots the maximum diameter of the first Fresnel zone as a function of target range for three different frequencies. The largest diameter plotted is 70 m (i.e. h = 35 m) for a 3 GHz signal tacking a target at 50 km, which validates the assumption that h << r1,r2.
To put the information in Figure 31 into perspective from a radar’s point of view, Figure 32 shows the 3-dB beamwidth required for the mainlobe to encompass the entire first Fresnel zone at its widest part. For example, a radar operating at 10 GHz with a beamwidth of 0.14 degrees will contain all of the first Fresnel zone when the target range is 20 km or greater. So, while multipath

DRDC Ottawa TM 2010-082 39
Figure 31: Maximum width of the first Fresnel zone as a function of target range.
Figure 32: Required mainlobe beam width for a radar signal to reach widest part of the first Fresnel zone as a function of target range.

40 DRDC Ottawa TM 2010-082
can still occur when the radar beam width does not reach the edge of the first Fresnel zone, the magnitude of the interference will not be enough to fully suppress the target return from the direct path.
In order to illustrate the importance and the dynamic nature of this effect, consider a shipborne radar tracking a low flying target above the sea surface, as illustrated in Figure 33. For simplicity assume the radar and target are 10 m above the sea surface and so the multipath reflection point occurs at one half of the target range. That is, r1 = r2 = ½ r. For a given frequency, the phase difference between the direct and multipath signals, as determined using equation (59), will oscillate between 0 and 2 as the target approaches the radar. Figure 34, known as a lobbing diagram, plots the vector sum of the two signals as a function of range for three frequencies. If chosen correctly, frequency agility can be used to fill in the destructive interference gaps encountered by single frequency radars. This is illustrated in Figure 35 which plots the maximum of the three curves as a function of range.
Now, just as the amount of surface clutter seen by a radar is defined by the backscatter coefficient, 0 (see section 4.1), the magnitude of a reflected signal is determined by the reflection coefficient of the surface, . Blake gives the total reflection coefficient as [42]:
Ri
VHVH SDe VH ,,, (61)
where is the dielectric reflection coefficient, is the phase angle shift in the signal due to reflection of the signal from the surface, D is a divergence factor and SR is a surface reflection factor. The subscripts H and V refer to horizontal and vertical polarizations, respectively.
The capacity of a material to reflect an electromagnetic wave is a function of its dielectric constant and conductivity. For horizontal and vertical polarizations, the surface reflection coefficient is given by:
2
2
2
2
cossin
cossin
cossin
cossin
V
H (62a)
(62b)
where is the complex permittivity of the reflecting material and is the grazing angle6. The complex permittivity of the substance is given by:
fir18 (63)
6 In fact, the term refers to the ratio of the dielectric constants of the reflecting material to the propagation material. For radar signals, the propagation material is air which has a dielectric constant of 1.0006.

DRDC Ottawa TM 2010-082 41
Figure 33: The geometry of a ship radar tracking a low flying target.
Figure 34: Signal strength as a function of target range for a target 30 m above the sea surface at three different frequencies.
Figure 35: Signal strength envelope for the three curves in Figure 34.

42 DRDC Ottawa TM 2010-082
where r is the relative permittivity, is the electrical conductivity of the material and f is the frequency of the reflected signal measured in GHz. The reflection coefficient for elliptically polarized signals is determined by using equations (62) on the horizontal and vertical component vectors individually and then combining their effects.
Table 7 lists typical electrical characteristics of common environmental surfaces for reference. The data for ground terrain (i.e. soil) is relevant to scenarios involving aircraft, especially when they or their targets are at low altitudes. The permittivity of soil is strongly impacted by its moisture content and so ground has been separated into three classes: dry (deserts and rocks), average (grasslands), and wet (swamps). The composition of ground terrain is varied unlike sea water, and it is reasonable to presume a number of different ground types (clay, loam, etc.) to be present within a radar’s footprint, and so the permittivity data in Table 7 are expressed as ranges rather than as single values. The data for water is relevant for both naval and air scenarios and comes from extensive research over many years. Sea water has a higher concentration of electrolytes than fresh water and so has a much higher conductivity.
Plots of the reflection coefficient and phase angle as functions of grazing angle, based on the data in Table 7, appear as Figure 36 to Figure 39. The horizontal axis has been plotted on a log scale for each of these four figures to highlight the dependence of the reflection coefficient at low grazing angles which are common for naval applications and suggested for air applications by the data in Figure 31. For reference, the red curve in all plots represents the same conditions: a 10 GHz signal reflected by sea water.
Figure 36 shows the effect that transmission frequency has on the magnitude of the reflection coefficient of sea water. Despite the fact that this material has the largest conductivity of the substances listed in Table 7 and therefore the strongest susceptibility to changes in frequency, the impact is small, verging on the negligible compared to the importance of the grazing angle. The effect is less important for horizontal polarizations than for vertical.
The phase angle generated by sea water reflections is shown in Figure 37 for sea water at three different frequencies. While horizontally polarized signals are generally reflected with a 180 degree phase shift (slightly smaller at larger grazing angles), the same is true for vertically polarized signals only up to a critical angle, B, which is known as Brewster’s angle, the value of which is given by [43]:
Table 7: Electrical characteristics of common environmental surfaces.
MATERIAL r (mho/m)
Ground Dry 4 – 7 0.001
Average 15 0.005
Wet 25 – 30 0.02
Sea Fresh 81 0.01
Sea 81 5

DRDC Ottawa TM 2010-082 43
Figure 36: Reflection coefficient magnitude for sea water at three different frequencies for vertical and horizontal polarizations.
Figure 37: Reflection coefficient phase for sea water at three frequencies for vertical and horizontal polarizations.

44 DRDC Ottawa TM 2010-082
Figure 38: Reflection coefficient magnitude for different materials: vertical polarization.
Figure 39: Reflection coefficient magnitude for different materials: horizontal polarization.



DRDC Ottawa TM 2010-082 47
Figure 41: Propagation factor as a function of elevation angle for a radar located 10 m above the sea.
Figure 41 plots the propagation factor as a function of elevation angle for a radar located 10 m above the sea surface. When the propagation factor is greater than one, the radar experiences greater sensitivity than that which would be expected in the case of only free space loss. The reverse is true when the propagation factor is less than one. As the elevation angle increases, the magnitude of the multipath effect decreases and so the propagation factor trends towards unity. Similar to Figure 34, multiple frequencies have been plotted to indicate how frequency agility can be used to mitigate this effect. In the special case of a small grazing angle, the reflection coefficient can be approximated by equation (65). This condition implies a smooth surface and so SR 1. Should the target range also be small, then D 1. Seybold gives the following approximation for the propagation factor in this case as, [47]:
2sin4 2
FSLF (71)
5.3 Terrain Loss
Terrain loss is only a factor if the mainlobe of the radar beam illuminates the ground. When this happens, diffraction loss, target shadowing and multipath can occur [48]. Empirically based models combine all of these effects into one result. Many of the models that replicate signal loss due to terrain interference have been developed for link planning for the establishment of communications networks. As such, they are focussed on determining the median path loss for a given source – receiver link (for 50% certainty). What this means is that as the conditions (primarily weather, but also atmospheric) change, the loss will be just as likely to be less than the model prediction as it is to be over the prediction. For general EW simulations the median condition is an acceptable value to use. For conservative studies (i.e. worst-case scenario investigations) an additional factor (say ±10 dB) can be included at the discretion of the modeller.

48 DRDC Ottawa TM 2010-082
Figure 42: Rough surfaces can prevent a beam from fully forming by blocking parts of the lobe.
5.3.1 Ground
There are three widely accepted models that can be used to calculate terrain loss as a function of bare ground. These are the ITU model, the Egli model and the Longley-Rice model. Each of these models is a function of the distance of the surface from the center of the radar mainlobe.
By way of example, Figure 42 depicts the case of a radar tracking an aircraft at low altitude. Within the radar footprint are four large peaks. The distance of each peak from the center of the radar beam, ha to hd, is indicated by the arrows. As illustrated, three of the four peaks cast shadows (grey regions) as the second peak is within the shadow of the first peak. Consistent with the Fresnel zone analysis, the arrows are drawn in the positive direction. Ground loss is determined using the minimum value of h, which in the case of Figure 42 is ha. Only positive values of h should be used to determine ground loss, however. If h is negative, the terrain rises above the centroid of the beam (the dotted line in Figure 42) and should be considered to impede the beam. In such cases diffraction loss (see Section 5.4) should be used instead.
The ITU model gives terrain loss as [49]:
dBFhLTI 1020
1(72)
where F1 is the width of the first Fresnel zone defined by the radar and the target and is computed using (60). Figure 31 plots twice the value of F1 for various conditions. The ITU model is a median estimation of terrain loss, between that from simple knife edge diffraction and that from a purely spherical earth. As such, the ITU cautions that the model should only be considered reliable when LTI is at least 15 dB, although it does suggest that values as low at 6 dB can be used.
The Egli model, on the other hand, was derived from fits to empirical data, and gives the median path loss due to terrain effects as [50]:

DRDC Ottawa TM 2010-082 49
Figure 43: Loss due to vegetation as a function of frequency for 4 different vegetation depths.
dBfr
hhL tr
TE
2
2
04.0log10 (73)
where hr is the altitude of the radar, ht is the altitude of the target, f is measured in GHz and r is the target range. The form of equation (73) has been altered from that which commonly appears in the literature so that the frequency is expressed in GHz rather than MHz in order to be consistent with other formulas that appear in this document. For worst case scenarios at radar frequencies, a further loss of 15 dB should be added for 90% certainty and 25 dB for 95% certainty [51].
Careful inspection of equation (73) shows that the height of the terrain does not explicitly appear. That is due to the nature of the formula which is a statistical average over many terrain conditions. The Egli model provides very good results when the thickness of the surface texture, hs (not the same as h used by the ITU model; see Annex B) is no more than 50 m. It should be further noted that the output of the Egli model also includes FSL unlike the ITU and Longley-Rice models, an important distinction.
The Longley-Rice model produces an accurate (i.e. not median) terrain loss based on precise terrain information, such as would be provided from Digitized Terrain Elevation Data (DTED) data sets [52]. The model is complex and cannot be described in a single equation unlike the ITU and Egli models. It was designed for fixed communication link applications and so is not well suited to the dynamic calculations typical of EW simulations.
5.3.2 Vegetation
Vegetation reacts to radar signals by scattering them diffusely, thereby reducing their power density along the direction of interest. Vegetation is not expected to play a significant role in Karma simulations with the possible exception as an augmentation to ground losses as defined in the previous section. The most recent ITU model provides formulas for many specific situations,


DRDC Ottawa TM 2010-082 51
Figure 45: Fresnel diffraction geometry for a single-sided barrier.
wave (amplitude and direction of travel) is therefore modified if the contribution from a portion of the wave is impeded (or blocked in the case for a barrier). Thus, objects without direct line-of-sight to a radar can still be visible to the radar, depending on the radar’s transmit power, target angle and the magnitude of the diffraction loss. The mathematics of the mechanism depends on the type of diffraction that takes place. This is determined by the Fresnel number, FN:
1
2
raFN (75)
where a is the radius of the diffracting aperture, is the wavelength of the wave and r1 is the distance from the source to the aperture (see Figure 44). Fraunhoffer diffraction occurs when FN < 1 (r1 >> a), otherwise Fresnel diffraction takes place. For most radar applications, diffraction will involve single objects such as a mountain or a building. In such cases, the barrier can be taken to be single-sided (i.e. have an aperture of infinite diameter). Hence, a and so Fresnel diffraction occurs.
Figure 45 presents the geometry of a radar beam interacting with a target in the diffraction zone behind an obstacle, in this case a mountain. All geometry is expressed relative to the base vector, which is the direct path from the radar to its target. An obstacle of height h lies a distance r1 from the radar and a distance r2 from the target. The distance h is measured perpendicular to the base vector rather than from the ground, and so is independent of the Above-Ground-Level (AGL) altitudes of the radar and target. This is desirable since AGL altitudes are function of the elevation of the ground. The wave travels a distance l1 to the peak of the obstruction, diffracts through an angle and travels a further distance l2 to the target. Note that the angles increase in

52 DRDC Ottawa TM 2010-082
Figure 46: The effect of obstacle location on the sign of the Fresnel-Kirchhoff diffraction parameter.
the direction of the arrows as shown in Figure 45, so if the diffraction point occurs below the base vector, then h, 1, 2, and are all negative.
A convenient parameter, the Fresnel-Kirchhoff diffraction parameter, v, can be expressed in terms of the diffraction angle, , or in terms of h [55]:
LFhv
Fv
2
2 (76a)
(76b)
where FL is the focal length of the aperture. For small angles ( < 0.2 radians; h << l1, l2) the focal length can be approximated as:
21
21
21
21
rrrr
llllFL (77)
Note that the focal length is a function of both the locations of the radar and the target and will change as either moves. Figure 46 shows the sign of h and v for various interference cases within the first Fresnel zone. As suggested by the chaff cloud and the building, the direction of the obstacle is unimportant to the sign of the diffraction parameter. Both will be positive when the diffracting object impedes the line-of-sight path from the radar to the target, otherwise they will both be negative.

DRDC Ottawa TM 2010-082 53
The diffraction co-efficient, D, gives the ratio of the electromagnetic field strength of the diffracted wave to that which would be the case for simple FSL. For a thin (i.e. knife-edge) barrier, this is given by [56]:
2
1
221
21, 21
v
v
si
FSL
diff dseiEE
vvD (78)
where v1 and v2 are the diffraction parameters for the lower and upper edges of the aperture, respectively. Using the Taylor expansion of the integrand, and noting that for single-sided barrier diffraction, v2 , equation (78) can be re-written as:
vCvSivCvSvD
dssidssi
dssidssivD
vv
v v
122
1
sin21cos
21
21
sincos2
1
0
221
0
221
2212
21
(79)
where v = v1 and the Fresnel cosine and sine relations have been used:
dssvS
dssvC
v
v
0
221
0
221
sin
cos (80a)
(80b)
The diffraction loss over an above the FSL, Ld, is given by:
dBvDLd 10log20 (81)
with D(v) given in equation (79). The integrals in equation (80) can be evaluated numerically using [57]:

54 DRDC Ottawa TM 2010-082
Figure 47: Diffraction loss as a function of the Fresnel-Kirchhoff parameter for a single edged diffractor.
0
3412
2
0
142
2
34!121
14!21
n
nnn
n
nnn
vnn
vS
vnn
vC (82a)
(82b)
Figure 47 plots the diffraction loss as a function of the Fresnel-Kirchhoff diffraction parameter. The red dot represents the case when an obstacle spans the entire first Fresnel zone. Such a blockage entails a 16 dB one-way loss. The yellow square represents a blockage of 50%, giving a 6 dB one-way loss. The green diamond represents the largest obstacle that can be tolerated without insuring the necessity to compute a diffraction loss. This occurs at v = -0.8 which corresponds to 0.6 h1, which is an important threshold to note. This implies that if the obstacle blocks less than 20% of the first Fresnel zone, FSL applies; otherwise, a diffraction loss must be computed. Barton gives a useful approximation for Ld when | v | < 1 [58]:
vLd 86 (83)

DRDC Ottawa TM 2010-082 55
Figure 48: Diffraction around an extended obstacle.
Thus far, only knife-edge diffraction has been considered. Real life objects are not so thin. To account for extended obstacles, a correction factor, Lex, is added to the Fresnel diffraction loss [59]:
exdd LLL (84)
This loss is given by :
RLex 7.11 (85)
where R is the radius of curvature of the diffracted wave around the obstacle as illustrated in Figure 48. The method of evaluating R is given in Annex D.
While it is possible for impeding obstacles to occur in isolation, the case of diffraction by multiple objects must also be considered [60][61]. There are three general methods for determining the diffraction loss by more than one object. Figure 49 depicts the approach of each method to diffraction by the same string of three mountains. The red triangles represent the diffraction angles for each method.
The first method, by Bullington, is to determine the diffraction loss from a single synthetic diffraction point base on the minimum elevation angles seen by the radar and the target [62]. As illustrated in Figure 49(a), the diffraction is defined by the first and third mountains. The diffraction is not necessarily due to the obstacles closest to the radar and the target, especially if they are quite low relative to subsequent features. The location and height of the synthetic diffraction point is found by locating the intersection of the lowest lines of sight from the radar and the target. The mathematics of this solution are provided in Annex D. Once found, the situation is then treated as diffraction from a single knife-edge.

56 DRDC Ottawa TM 2010-082
The approach proposed by Epstein and Peterson is to treat the scenario as a series of single diffractions with the total loss being the sum of the losses from each diffraction as shown in Figure 49(b) [63]. Depending on the heights of the objects some may not contribute. For example, if the height of the middle mountain were such that its peak lay outside the first Fresnel zone defined by the first and third mountains then no diffraction from this mountain would occur.
The final approach, by Deygout, considers the diffraction to be due primarily to the strongest obstacle with the contributions for the other obstacles treated as corrections [64]. To implement this method, the primary diffractor must be identified. This is done by determining the diffraction loss due to each obstacle in isolation. The obstacle which gives the greatest loss is then designated as the primary diffractor. As illustrated in Figure 49(c), the primary diffractor is the second mountain (with the dark red triangle). The contributions from the other obstacles are determined to the base vectors from the primary diffractor to the radar and target (light red triangles). The total loss is given by the sum of each loss.
There is one final aspect of diffraction loss to consider. The underlying mechanics of terrain loss and diffraction loss are the same: the impeding of the formation of the far field condition. Normally, these losses would be considered to be independent of each other and combined linear-ly. However, Blomquist has found empirically that a more representative result is given by the incoherent sum of the individual losses [65]:
22dT LLL (86)

DRDC Ottawa TM 2010-082 57
Figure 49: Three methods to determine diffraction loss around multiple obstacles.

58 DRDC Ottawa TM 2010-082
6 Discussion
This section raises issues regarding the simulation of a radar engaging a target in a hostile environment. One instance of a radar transmission and the impact of that signal upon the other players within a synthetic environment is examined. As topics of concern are raised, available options are proposed and recommendations made as appropriate. The topics raised in this discussion will be, by and large, common to all RF sensors within a scenario but implementations will, in some cases, need to be tailored to address the individual requirements of specific systems.
6.1 Scenario Preparation
When a radar transmits, its waveform will have certain defining characteristics. Similarly, RF sensors will also be looking for particular information. In order for individual entity models to be truly plug and play as per the Karma philosophy [2], this suggests the creation of a Standardized Parameter List (SPL) that will be populated by all emitters and presented to all sensors. Not every item in the SPL will be relevant to every player, of course, but use of a standard parameter list will facilitate the ability of the SE (see Section 1.1) to manage RF players in a uniform manner. Table 8 provides and initial list of parameters to include in the SPL.
A second aspect that must be decided is the time resolution that the scenario will have. Radars can operate with continuous wave signals (functionally similar to IR simulation) or alter their waveforms with each transmission (pulse-to-pulse agility) or after set periods of time (burst-to-burst agility). Modern radar systems can incorporate multiple modes and switch between them as an engagement evolves. Notionally it is simplest to progress a scenario on a pulse-by-pulse basis, but this requires increased computing power (versus fixed time interval processing) to achieve results in real-time. The nominal driver is the player with the finest time resolution since it is easier to collect information on a pulse-by-pulse basis and construct a burst response for a system with a large time step than it is to deconstruct a burst response to generate individual pulse information to provide the required input to a system with a small time step. The final solution will be determined by the scenario architect as a balance between scenario execution time and computational complexity.
Table 8: Components of a standardized parameter list for RF simulations.
WAVEFORM TRANSMISSION
Parameter Symbol Units Parameter Symbol Units
Bandwidth BW MHz Time t s
Field Density P W/m2 Direction
Frequency f GHz Azimuth az rad
Polarization rad Elevation el rad
Pulse Width s


60 DRDC Ottawa TM 2010-082
Figure 50: Far-field radiation pattern for a sin(x)/x antenna.
a. Alternative paths to the target (i.e. multipath ; Section 5.2)
b. Shadowing loss from terrain interference (Section 5.3)
c. Diffraction loss (Section 5.4).
4. Compute the FSL along the direct path from the emitter to the player.
5. Apply any atmospheric effects, including:
a. Absorption by atmospheric gasses (Section 3.2), and
b. Attenuation due to weather (Section 3.3)
6. Compute the effect of clutter along the direction (Section 4).
7. Apply the antenna pattern of the player to reflect its sensitivity to receiving signals along this direction.
8. Compute the radial velocity (if any) of the player along the direction and apply a Doppler shift to the signal.
9. Determine the time of flight for the signal from the emitter to the player and place it in a dedicated queue for presentation to the player.
Beyond this general list, there are two issues that require further discussion regarding their implementation.

DRDC Ottawa TM 2010-082 61
Figure 51: The effect of orientation on observed polarization.
The first issue is signal polarization and player orientation. Signals that are not co-polarized with a receiver will suffer some loss, referred to as polarization mismatch. This is expected to be handled by the receiver models. Models however are not expected to know their orientation. For example, consider an airborne radar that uses vertical polarization. The radar model will use and report vertical polarization through its SPL throughout a scenario, regardless of what happens. However, should the aircraft turn on its side such as during a turn, the radar will continue to produce vertically polarized signals in the aircraft frame, but these signals will appear to be horizontally polarized to observers on the ground. The SE, therefore, must convert all polarizations to a master reference frame before processing their propagation and then convert the resulting signals into the frame of the receiver.
The other issue is multipath. If signals overlap at a receiver, either due to multipath or competing signals from different sources, the SE will have to compute a compound signal before entering the data into the queue of that sensor.

62 DRDC Ottawa TM 2010-082
References .....
[1] Patterson,W.L. (2001), Advanced Refractive Effects Prediction System (AREPS), (A242434) Space and Naval Warfare Systems Center San Diego.
[2] Gilbert,B. et al. (2002), Project KARMA: Definition and requirements, (DRDC Valcartier TM 2001-271) Defence R&D Canada – Valcartier.
[3] Belhumeur, C. et al. (2010), VRAPP systems overview : KARMA, (DRDC Valcartier TM 2010-208) Defence R&D Canada - Valcartier
[4] ITU: Committed to connecting the world (online), International Telecommunication Union, http://www.itu.int/en/pages/default.aspx, (Access date: 10 December 2009).
[5] Skolnik,M.I. (1980), Introduction to Radar Systems, New York: McGraw-Hill, Inc.
[6] Stimson,G.W. (1998), Introduction to Airborne Radar, 2nd ed., Mendham: SciTech Publishing, Inc.
[7] Seybold,J.S. (2005), Introduction to RF Propagation, Hoboken: John Wiley & Sons, Inc., p.67.
[8] Friis,H.T. (1946), A Note on a Simple Transmission Formula, Proc. of the IRE, 34 (5), p.254-256.
[9] Bogush,A.J. (1989), Radar and the Atmosphere, Norwood: Artech House, p.286.
[10] ITU-R Recommendations, The radio refractive index: its formula and refractivity data,ITU-R P.453-9, Geneva, 2003.
[11] ITU-R Recommendations, Reference standard atmospheres, ITU-R P.835-4, Geneva, 2005.
[12] Lide,D.R. ed., (1993), CRC Handbook of Chemistry and Physics, 74th ed., Boca Raton: The Chemical Rubber Company, p.14-12.
[13] Strandberg,M.W.P, Meng,C.Y. and Ingersoll,J.G. (1949), The Microwave Absorption Spectrum of Oxygen, Physical Review, 75 (10), p.1524-1528.
[14] ITU-R Recommendations, Attenuation by atmospheric gases, ITU-R P.676-7, Geneva, 2007.
[15] Lange,J.B. (2010), Radio Frequency Propagation Tables: Project RF Karma, (DRDC Ottawa TN 2010-081) Defence R&D Canada – Ottawa. (internal publication)
[16] ITU-R Recommendations, Attenuation due to clouds and fog, ITU-R P.840-3, Geneva, 1999.


64 DRDC Ottawa TM 2010-082
[34] Ince,A.N., Vogt,I.M. and Gössl,H. (1976), Design of Chaff and Chaff-Supported Communication Systems, IEEE Trans. Comm., 24 (8), p.785-803.
[35] Hayes,R.D. (2001), Electronic Warfare and Countermeasures in The RF and Microwave Handbook, Golia.J.M. ed., Boca Raton: CRC Press LLC, p.2-214.
[36] Marcus,S.W. (2007), Electromagnetic Wave Propagation Through Chaff Clouds, IEEETrans. Ant. Prop., 55 (7), p.2032-2042.
[37] Bertoni,H.L. et. al. (1994), UHF Propagation Prediction for Wireless Personal Communications, Proc. of the IEEE, 82 (9), p.1333-1359.
[38] Lee,W.C.Y. (1998), Mobile Communications Engineering, Theory and Applications, 2nd
ed., New York: McGraw-Hill, Inc., p.109-114.
[39] World Meteorological Organization (1995) Manual on Codes; International Codes; Volume I.1; Part A – Alphanumeric Codes, WMO-No. 306, Geneva, p.I.1-C-105.
[40] Mahafza, B.R. (1998), Introduction to Radar Analysis, Boca Raton: CRC Press LLC, p.188.
[41] Kopp,C. (2000), Sunburns, Yakhonts, Alfas and the Region, Australian Aviation, Sept. 2000.
[42] Blake,L.V. (1986), Radar Range-Performance Analysis, Norwood: Artech House, p.258-271.
[43] Brewster’s Angle – from Eric Weisstein’s World of Physics (online), Eric W. Weisstein, http://scienceworld.wolfram.com/physics/BrewstersAngle.html (Access date 08 Feb 2010).
[44] Kerr,D.E., ed. (1951), Propagation of Short Radio Waves, M.I.T. Radiation Laboratory Series, vol. 13, New York: McGraw-Hill, p. 406.
[45] Ament,W.S. (1953), Toward a Theory of Reflection by a Rough Surface, Proc. IRE, 41 (1), p.142-146.
[46] Barton,D.K. (1988), Modern Radar System Analysis, Norwood: Artech House, Inc., p.290-296.
[47] Seybold,J.S. (2005), Introduction to RF Propagation, Hoboken: John Wiley & Sons, Inc., p.170.
[48] Donohue,D.J. (2000), Propagation Modeling Over Terrain Using the Parabolic Wave Equation, IEEE Transactions on Antennas and Propagation, 48 (2), p.260-277.
[49] ITU-R Recommendations, Multipath propagation and parameterization of its characteristics, ITU-R P.1407-3, Geneva, 2007.
[50] Egli,J.J. (1957), Radio Propagation Above 40 MC Over Irregular Terrain, Proc. of the IRE,45 (10), p.1383-1391.

DRDC Ottawa TM 2010-082 65
[51] Parsons,J.D. (2000), The Mobile Radio Propagation Channel, 2nd ed., West Sussex: Wiley, p.53-54.
[52] Blaunstein,N. (2000), Radio Propagation in Cellular Networks, Norwood: Artech House, p.159-163.
[53] ITU-R Recommendations, Attenuation by vegetation, ITU-R P.833-6, Geneva, 2007.
[54] Keller,J.B. (1962), Geometrical Theory of Diffraction, Journal of the Optical Society of America, 52 (2), p.116-130.
[55] ITU-R Recommendations, Propagation by diffraction, ITU-R P.526-10, Geneva, 2007.
[56] Electromagnetic Waves and Antennas (online), Orfanidis,S.J., http://www.ece.rutgers.edu/~orfanidi/ewa/ (Access date: 19 December 2009).
[57] Abramowitz,M. and Stegun,I.A. (1972), Handbook of Mathematical Functions With Formulas, Graphs and Mathematical Tables, U.S. Department of Commerce, p.300.
[58] Barton,D.K. (1988), Modern Radar System Analysis, Norwood: Artech House, Inc., p.290-296.
[59] Seybold,J.S. (2005), Introduction to RF Propagation, Hoboken: John Wiley & Sons, Inc., p.182.
[60] Giovaneli,C.L. (1984), An Analysis of Simplified Solutions for Multiple Knife-Edge Diffraction, IEEE Transactions on Antennas and Propagation, 32 (3), p.297-301.
[61] Carlson,A. and Waterman,A.Jr. (1966), Microwave Propagation Over Mountain-Diffraction Paths, IEEE Transactions on Antennas and Propagation, 14 (4), p.489-496.
[62] Bullington,K. (1955), Characteristics of Beyond-the-Horizon Radio Transmission, Proc.IRE, 43 (10), p.1175-1180.
[63] Epstein,J. and Peterson,D.W. (1953), An Experimental Study of Wave Propagation at 850 Mc/s, Proc. Inst. Radio Engrs., 41 (5), p.595-611.
[64] Deygout,J. (1966), Multiple Knife-Edge Diffraction of Microwaves, IEEE Transactions on Antennas and Propagation, 14 (4), p.480-489.
[65] Blomquist,A. and Ladell,L. (1974), Prediction and Calculation of Transmission Loss in Different Types of Terrain, NATO AGARD Conf. Pub. CP 144, Res. Inst. Nat. Defense, Dept. 3, S-10450, Stockholm 80, Sweden, p.32/1-32.17.
[66] Lange,J.B. (2005), A Methodology for Complex RF Target Synthesis, (DSTO-TR-1802) Defence Science and Technology Organisation.

66 DRDC Ottawa TM 2010-082
[67] Arslan,A.N., Koskinen,J., Pulliainen,J. and Hallikainen,M. (2000), A Semi Empirical Backscattering Model of Forest Canopy Covered by Snow Using SAR Data, , (), p.1904-1906.
[68] Fishback,W.T. (1943), Simplified Methods of Field Intensity Calculations in the Interface Region, MIT Radiation Laboratory Report 461.
[69] Blake,L.V. (1986), Radar Range-Performance Analysis, Norwood: Artech House, p.253-258.
[70] Miller,A.R. and Vegh,E. (1993) Exact Result for the Grazing Angle of Specular Reflection from a Sphere, SIAM Review, 35 (3), p.472-480.

DRDC Ottawa TM 2010-082 67
Annex A Signal Flow in an RF Engagement
This annex provides a general RF propagation flow diagram, linking the elements identified in Section 1.2, in the context of the Karma simulation environment.
Figure A-1: Generic layout of an RF propagation model.

68 DRDC Ottawa TM 2010-082
Annex B Surface Roughness and the Rayleigh Criterion
This annex provides a geometrical derivation of equation (31) which gives the threshold for rough terrain. Consider a wave incident upon a textured surface at some grazing angle as shown in Figure B-. The depth of the surface texture is hs. The largest differential in phase occurs when the wave reflects from the highest (point A; blue ray) and lowest (point B; red ray) parts of the surface. This causes a lateral offset of the wave, x, that is important here only for geometric analysis.
Figure B-1: Reflection of a wave by a textured surface.
The physical path difference, , between these two cases is given by:
br rr2 (B.1)
where rr is one half of the path length of the red ray from point B back up to an elevation of hs(indicated by the wide red line) and rb is the length of the blue ray from point A to the same wave front as indicated by the wide blue line. Any common wave front position along the reflected path will suffice, but selecting the wave front to be at this location simplifies the math. Careful inspection of Figure B-1 reveals the following relations:
cos2sincossin
r
b
ryyxxzrz (B.2a)
(B.2b)
(B.2c)
(B.2d)
Substitution of these equations into equation (B.1) results in:

DRDC Ottawa TM 2010-082 69
Figure B-2: Signals must differ in phase by at least /2 to be resolvable.
2sin2 rr (B.3)
Now rr is related to the depth of the surface texture and grazing angle by:
sins
rh
r (B.4)
and so:
sin2 sh (B.5)
The phase difference between the two paths, , is given by:
sin42 sh(B.6)
The Rayleigh criterion for two signals to be resolvable is for the phase difference between them to be at least /2. Substitution of this value into equation (B.6) gives a surface roughness threshold of:
Rsh
sin8 (B.7)
where R is the threshold grazing angle for a rough surface.

70 DRDC Ottawa TM 2010-082
Annex C Terrain Bounce Geometry with a Spherical Earth
This annex derives the equations necessary to derive the parameters required to characterize the indirect terrain bounce path from an elevated radar to an airborne target. Most references in the open literature to this problem refer to Fishback’s derivation of the cubic equation [68]:
02232 21
21
31 dhRhhRddddd reqtreq (C.1)
with his solution of:
3sin
21 pdd (C.2)
where:
31
2
2sin
2/3
2
phhdR
dhhRp
rteq
treq (C.3a)
(C.3b)
and do nothing more. Blake expands upon this, but his derivation is not well aligned with the requirements of a radar engagement simulation [69] . The work presented here modifies Blake’s work to this perspective. A more in-depth analysis of this problem is provided by Miller and Vegh [70] but it is beyond the scope of what is necessary here.
Figure C-1 displays the geometry of the situation. The direct path (RT) and the indirect ground bounce path (RGT) are shown. The following information is assumed to be known: the height of the radar, hr, the height of the target, ht, the radius of the earth, Req, and the ground separation between the radar and the target, d. These parameters are shown in blue in the figure and provide the information required to solve for d1 and d2. The required parameters are the target range, r,the distances from the radar along the reflection path, r1 and r2, the grazing angle, , the elevation angle from the radar’s local horizontal to the target, u, and the look down angle from the radar’s local horizontal to the ground bounce point d. These parameters are shown in red.
The first step is to determine the direct target range, r, which is accomplished by examining the large triangle (RTC) with point (C) located at the center of the earth. Since straight atmospheric ray paths are used, the equivalent earth radius, Req, must be used (see Section 3.1). Using the law of cosines:

DRDC Ottawa TM 2010-082 71
Figure C-1: Geometry of target tracking above a spherical earth.

72 DRDC Ottawa TM 2010-082
21222 cos2 eqteqreqteqr RhRhRhRhr (C.4)
With d1 determined using equation (C.2) the following angles become known:
eq
eq
eq
Rdd
RdRd
12
11
(C.5a)
(C.5b)
(C.5c)
Using the following relation:
2/sin2cos1 2 (C.6)
equation (C.4) can be rewritten as:
eqeqteqrrt R
dRhRhhhr2
sin4 222 (C.7)
Recall that hr and ht are less than 15 km and a reasonable maximum ground range for a search radar is 400 km. Using the 4/3 earth model radius of 8360 km, will be no larger than 0.048 radians. Equation (C.7) can then be simplified to:
eq
trrt R
hhdhhr 122 (C.8)
The range from the radar to the ground is found by applying the law of cosines to the triangle (RCG):
1222
1 cos2 eqreqeqreq RhRRhRr (C.9)
Following the same methodology as above, solutions for the slant paths are found:

DRDC Ottawa TM 2010-082 73
eq
tt
eq
rr
Rh
dhr
Rhdhr
1
1
22
22
21
21 (C.10a)
(C.10b)
where the solution for r2 comes from triangle (TCG).
The next step is to determine the look angles for the radar. The look-up angle to the target is found by applying the law of cosines to triangle (RTC):
ueqreqreqt RhrrRhRh 2222 cos2 (C.11)
which leads to:
eq
rtu R
rr
hh2
sin (C.12)
The look down angle is solved for by applying the law of cosines to triangle (RCG):
deqreqreq RhrrRhR 212
122 cos2 (C.13)
which leads to:
eq
rd R
rrh
2sin 1
1
(C.14)
Finally the grazing angle, , can be found by examining the interior angles of triangle (RCG):
1
122
d
d
(C.15)

74 DRDC Ottawa TM 2010-082
Annex D Determination of a Synthetic Diffraction Point
Consider a radar at point A tracking a target at point B, separated by a distance r with two obstacles between them as shown in Figure D-1. The first obstacle has a height of h1 and is a distance r1 from the radar, while the second obstacle is located a distance r2 from the target and has a height of h2. The first step in determining the diffraction loss, J(v), is to locate the projected diffraction point C. From the figure, it is clear that:
4321 rrrrr (D.1)
and that:
31
3
1
11tan
rrh
rh
(D.2a)
(D.2b)
and so:
42
3
2
22tan
rrh
rh (D.3a)
(D.3b)
Substitution of equations (D.2b) and (D.3b) into equation (D.1) gives
21
213 tantan
tantanhr (D.4)
This can be re-written in terms of the known parameters through the substitution of equations (D.2a) and (D.3a) into equation (D.4):
1221
213 rhrh
hhrh (D.5)
Since h3 is now known, r3 and r4 can be found by solving equations (D.2b) and (D.3b), respectively.

DRDC Ottawa TM 2010-082 75
Figure D-1: The geometry of diffraction around two knife edges by a synthetic obstacle.
The final requirement is to solve for R, the effective radius of the diffraction. This is accomplished by examining the quadrilateral formed at point C by the ray paths and the radii of curvature. By symmetry it is apparent that:
2/tanilR (D.6)
with li being the minimum of {l3,l4}. These values are determined by the formula:
23
2iii hhrl (D.7)

76 DRDC Ottawa TM 2010-082
This page intentionally left blank.

DRDC Ottawa TM 2010-082 77
List of Abbreviations, Acronyms, Initialisms & Symbols
DRDC Defence R&D Canada
EM Electro-Magnetic
EO Electro-Optic
EW Electronic Warfare
FSL Free Space Loss
IR Infrared
ITU International Telecommunications Union
LOS Line of Sight
NATO North Atlantic Treaty Organization
PRF Pulse Repetition Frequency
PRI Pulse Repetition Interval
RCS Radar Cross-Section
RF Radio Frequency
RWR Radar Warning Receiver
SE Simulation Environment (Karma)
SPL Standardized Parameter List
Latm Atmospheric loss
Ld Loss due to diffraction
Lex Loss due to diffraction by an extended obstacle
LFS Free space loss
Lmp Loss due to multipath
LT,X Terrain loss computed by model ‘X’
LV Vegetation loss
atm Atmospheric absorption rate
c Attenuation rate of chaff
f Absorption rate of fog (including clouds)
o Absorption rate of oxygen
r Rain (and all other hydrometers)
w Absorption rate of water

78 DRDC Ottawa TM 2010-082
Grazing angle
Polarization angle
(Az,El,u,d) Radar look angle (azimuth, elevation, up, down)
(Az,El) Radar 3-dB beamwidth in (azimuth, elevation)
Diffraction angle
c Speed of light
C Clutter response
C(v) Fresnel cosine
d Ground distance
D Divergence factor
D(v) Diffraction co-efficient
d̂ Rain droplet diameter
f Frequency
fp,s Relaxation frequency (primary, secondary)
F Propagation factor
FL Focal length
FN Fresnel number
G Gain (antenna)
hr,s,t Height (radar, surface (thickness), target)
k Ratio of equivalent to true earth radii
Kl Attenuation coefficient (clouds)
k Regression scaling factor (rain)
l Radar path length
M Moisture density (clouds)
n Index of refraction
N Refractivity
P(h) Pressure (atmospheric)
Pr,t Power – Receiver,Transmitter
r Radar Range
rV Vegetation depth
Req Equivalent earth radius
R True earth radius

DRDC Ottawa TM 2010-082 79
RR Rain rate
S(v) Fresnel sine
SR Surface reflection factor
T Temperature
V Volume
Z Radar reflectivity factor (rain)
R Grazing angle threshold for a rough surface
Regression exponent (rain)
H,V Reflection coefficient (horizontal; vertical polarization)
Difference in path lengths (phase)
Difference in path lengths (linear)
(h) Pressure (water vapour)
Permittivity
' Permittivity – real component
Permittivity – imaginary component
Volume clutter density
Medium factor (related in index of refraction)
Wavelength
v Fresnel-Kirchhoff diffraction parameter
Rate of curvature of RF signals within the atmosphere.
H,V Dielectric reflection coefficient (horizontal; vertical polarization)
Cross-section 0 Backscatter coefficient
Pulse width
S Clutter region (surface)
v Clutter region (volume)

80 DRDC Ottawa TM 2010-082
This page intentionally left blank.

DOCUMENT CONTROL DATA (Security classification of title, body of abstract and indexing annotation must be entered when the overall document is classified)
(The name and address of the organization preparing the document. Organizations for whom the document was prepared, e.g. Centre sponsoring a contractor's report, or tasking agency, are entered in section 8.)
(Overall security classification of the document including special warning terms if applicable.)
(The complete document title as indicated on the title page. Its classification should be indicated by the appropriate abbreviation (S, C or U) in parentheses after the title.)
(last name, followed by initials – ranks, titles, etc. not to be used)
(Month and year of publication of document.) (Total containing information, including Annexes, Appendices, etc.)
4
(Total cited in document.)
(The category of the document, e.g. technical report, technical note or memorandum. If appropriate, enter the type of report, e.g. interim, progress, summary, annual or final. Give the inclusive dates when a specific reporting period is covered.)
(The name of the department project office or laboratory sponsoring the research and development – include address.)
(If appropriate, the applicable research and development project or grant number under which the document was written. Please specify whether project or grant.)
(If appropriate, the applicable number under which the document was written.)
(The official document number by which the document is identified by the originating activity. This number must be unique to this document.)
(Any other numbers which may be assigned this document either by the originator or by the sponsor.)
(Any limitations on further dissemination of the document, other than those imposed by security classification.)
(Any limitation to the bibliographic announcement of this document. This will normally correspond to the Document Availability (11). However, where further distribution (beyond the audience specified in (11) is possible, a wider announcement audience may be selected.))

13. ABSTRACT (A brief and factual summary of the document. It may also appear elsewhere in the body of the document itself. It is highly desirable that the abstract of classified documents be unclassified. Each paragraph of the abstract shall begin with an indication of the security classification of the information in the paragraph (unless the document itself is unclassified) represented as (S), (C), (R), or (U). It is not necessary to include here abstracts in both official languages unless the text is bilingual.)
DRDC Ottawa has been tasked to formulate the means to extend the Karma simulationframework that was developed by DRDC Valcartier from the electro-optic and infrared regionsof the electromagnetic spectrum to include the radio frequency portion as well. This documentidentifies the factors which affect the propagation of radar signals in a benign environment,including atmospheric and terrain effects. A selection of relevant models available in the openliterature is described and discussions of the background physics of these models are givenwhere necessary. Finally, recommendations for the implementation of target engagementthrough active rather than passive tracking are outlined.
RDDC Ottawa s’est vu confié la tâche d’étendre le cadre de simulation Karma, créé par RDDCValcartier pour les composantes électro-optique et infrarouge du spectre électromagnétique, à lacomposante des radiofréquences. Le présent document cerne les facteurs, dont les effetsatmosphériques et les effets du terrain, qui influent sur la propagation des signaux radar dans unenvironnement anodin. Le document comporte aussi les descriptions d’un choix de modèlespertinents publiés dans la littérature non classifiée, et des discussions sur les principes dephysique derrière ces modèles sont données où nécessaire. Enfin, sont indiquées desrecommandations favorisant l’engagement de cible par la poursuite active plutôt que passive.
14. KEYWORDS, DESCRIPTORS or IDENTIFIERS (Technically meaningful terms or short phrases that characterize a document and could be helpful in cataloguing the document. They should be selected so that no security classification is required. Identifiers, such as equipment model designation, trade name, military project code name, geographic location may also be included. If possible keywords should be selected from a published thesaurus, e.g. Thesaurus of Engineering and Scientific Terms (TEST) and that thesaurus identified. If it is not possible to select indexing terms which are Unclassified, the classification of each should be indicated as with the title.)
RF ; Propagation