Embed Size (px)
Citation preview
Structure cinématique page 1 / 4
Structure cinématique.doc
S tr uctur e cinématique
1. Introduction.L’objectif est d’étudier les mécanismes, c.a.d. d’étudier leurs mouvements et les efforts transmis etsubis par ces mécanismes. Toutes ces grandeurs dépendent de la structure des mécanismes, et de lamanière dont sont assemblées les pièces les unes par rapport aux autres. Il faut donc modéliser lesassemblages entre les solides.
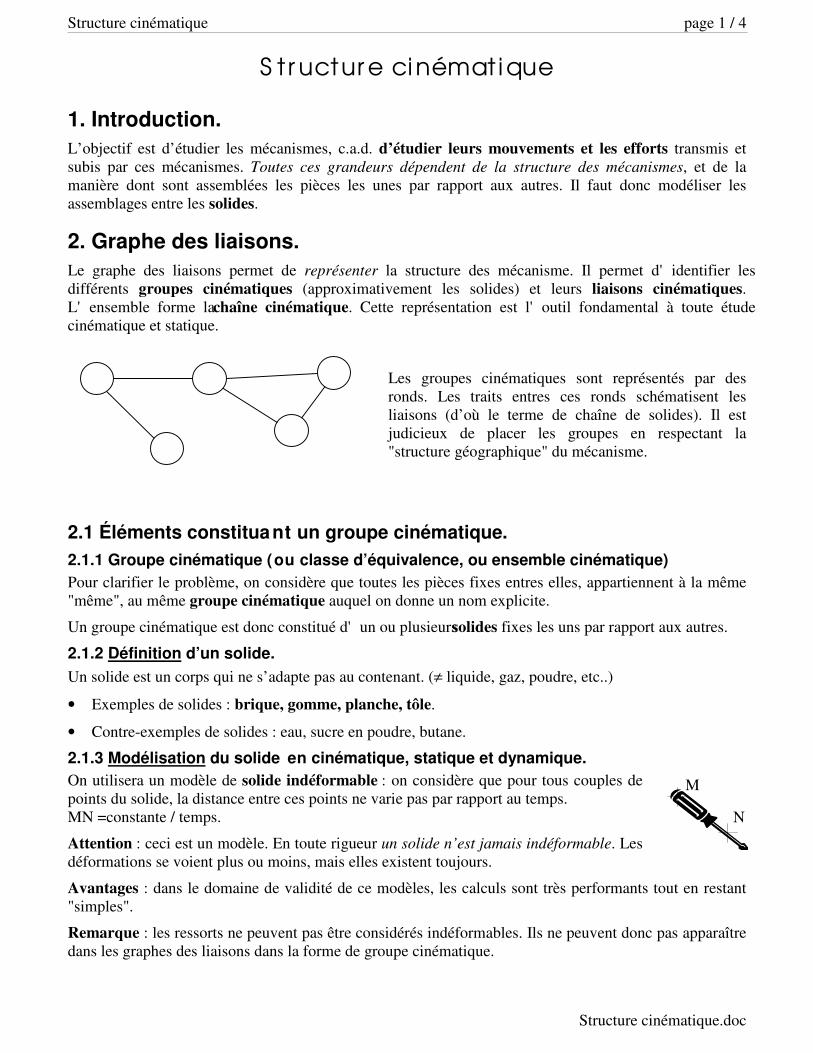
2. Graphe des liaisons.Le graphe des liaisons permet de représenter la structure des mécanisme. Il permet d'identifier lesdifférents groupes cinématiques (approximativement les solides) et leurs liaisons cinématiques.L'ensemble forme la chaîne cinématique. Cette représentation est l'outil fondamental à toute étudecinématique et statique.
Les groupes cinématiques sont représentés par desronds. Les traits entres ces ronds schématisent lesliaisons (d’où le terme de chaîne de solides). Il estjudicieux de placer les groupes en respectant la"structure géographique" du mécanisme.
2.1 Éléments constituant un groupe cinématique.2.1.1 Groupe cinématique (ou classe d’équivalence, ou ensemble cinématique)Pour clarifier le problème, on considère que toutes les pièces fixes entres elles, appartiennent à la même"même", au même groupe cinématique auquel on donne un nom explicite.
Un groupe cinématique est donc constitué d'un ou plusieurs solides fixes les uns par rapport aux autres.
2.1.2 Définition d’un solide.Un solide est un corps qui ne s’adapte pas au contenant. (≠ liquide, gaz, poudre, etc..)
• Exemples de solides : brique, gomme, planche, tôle.
• Contre-exemples de solides : eau, sucre en poudre, butane.
2.1.3 Modélisation du solide en cinématique, statique et dynamique.On utilisera un modèle de solide indéformable : on considère que pour tous couples depoints du solide, la distance entre ces points ne varie pas par rapport au temps.MN =constante / temps.
Attention : ceci est un modèle. En toute rigueur un solide n’est jamais indéformable. Lesdéformations se voient plus ou moins, mais elles existent toujours.
Avantages : dans le domaine de validité de ce modèles, les calculs sont très performants tout en restant"simples".
Remarque : les ressorts ne peuvent pas être considérés indéformables. Ils ne peuvent donc pas apparaîtredans les graphes des liaisons dans la forme de groupe cinématique.
M
N
Structure cinématique page 2 / 4
Structure cinématique.doc
2.1.4 Grandeurs définissant la nature des solides.• La masse d’un corps.
Elle est lié à l’existence de la matière. Elle est fonction de la forme du corps (en particulier de sonvolume) et de sa masse volumique.
Propriété : la masse est conservative : C’est à dire qu’elle ne varie pas au cours du temps. Elle estconstante quelque soit l’endroit où se trouve le solide (terre ou lune).
Unité (kg ou g), notation (m, M). exemple : m = 10 kg
• Le volume :
Lié à la forme du corps. Unité (m3, dm3, l), notation (v, V). exemple : v = 3 l
• La masse volumique.
C’est la grandeur qui différentie les différents matériaux qui composent les corps (donc les solides aussi).
Propriété : cette grandeur est constante et intrinsèque à la matière.
Unité (kg/m3) , notation ρ. Exemple ρ = 3000 kg/m3
eau 1000 kg/m3. aluminium 2700 kg/m3
Acier 7860 kg/m3 plomb 11300 kg/m3
Caoutchouc 950 kg/m3 ainsi que les huiles
• Relation entre les trois grandeurs.
m = ρρ.V attention : ρ = mV n’a pas le même sens physique
2.2 Modélisation des assemblages par des liaisons.2.2.1 Définition d’un assemblage.Un assemblage est l’association de deux solides par l’intermédiaire d’une zone de contact. Selon de typed’assemblage les mouvements relatifs entre les solides sont différents Les assemblages sont choisis parle concepteur en fonction de leurs propriétés cinématique.
2.2.2 Mouvements relatifs.• Le mouvement relatif est lié au déplacement relatif.
• Dans le cas d'une étude dans l'espace les mouvements relatifs entre deux peuvent être décomposésen 6 mouvements élémentaires : 3 translations & 3 rotations.
• Dans le cas d'une étude dans le plan (2D) : 2 translations & 1 rotation
• Un mouvement est toujours relatif. « mouvement de quelque chose par rapport à autre chose ».
• Le nombre de mouvements élémentaires entre deux solides va dépendre du type d’assemblage. Achaque assemblage (réel est plein de défauts) sera associée une liaison (parfaite et normalisée)définie par ces caractéristiques cinématique : démarche de modélisation des assemblages. Le nombre de mouvements relatifs entre deux solides est égal au degré de liberté de la liaison.
2.2.3 Liaisons principales.• En 3D, Il existe dix liaisons (voire onze) couramment utilisées (cf. tableaux pages suivantes).
• En 2D, il n'y en a que 3 : pivot, glissière et ponctuelle.Ce qui explique qu'on s'arrange pour souvent étudier les mécanismes en 2D.
A chaque liaison sont associés un nom, des caractéristiques géométriques, une représentation (avecdeux couleurs) et un tableau des mobilités.
Structure cinématique page 3 / 4
Structure cinématique.doc
3. Schéma cinématique.Le graphe de structure (graphe des liaisons) d’un mécanisme s’accompagne parfois d’un schémacinématique qui permet de visualiser le squelette du mécanisme.Le schéma cinématique n’est pas une fin en soit, mais il est assez visuel à condition d'utiliser lesreprésentations normalisées des liaisons et de respecter les règles de dessin industriel (disposition etcorrespondances des vues).
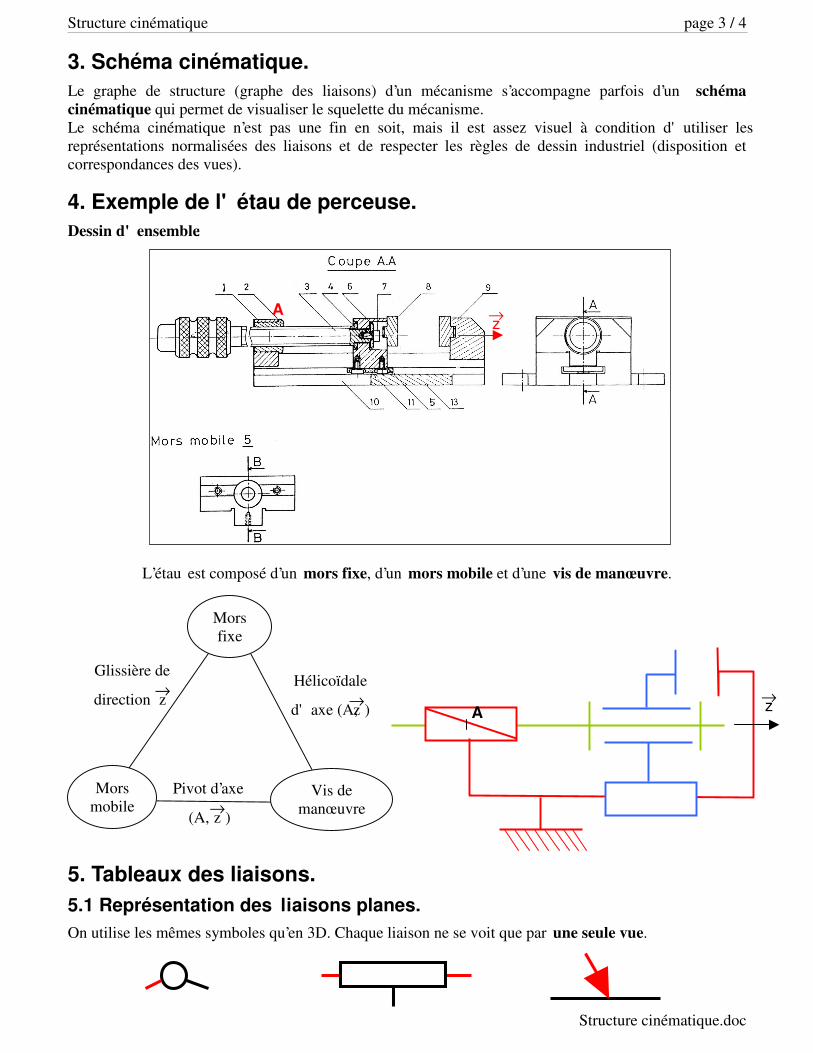
4. Exemple de l'étau de perceuse.Dessin d'ensemble :
L’étau est composé d’un mors fixe, d’un mors mobile et d’une vis de manœuvre.
5. Tableaux des liaisons.5.1 Représentation des liaisons planes.On utilise les mêmes symboles qu’en 3D. Chaque liaison ne se voit que par une seule vue.
Morsfixe
Morsmobile
Vis demanœuvre
Pivot d’axe
(A,→z )
Hélicoïdale
d'axe (A,→z )
Glissière de
direction →zA
→z
A →z
Structure cinématique page 4 / 4
Structure cinématique.doc
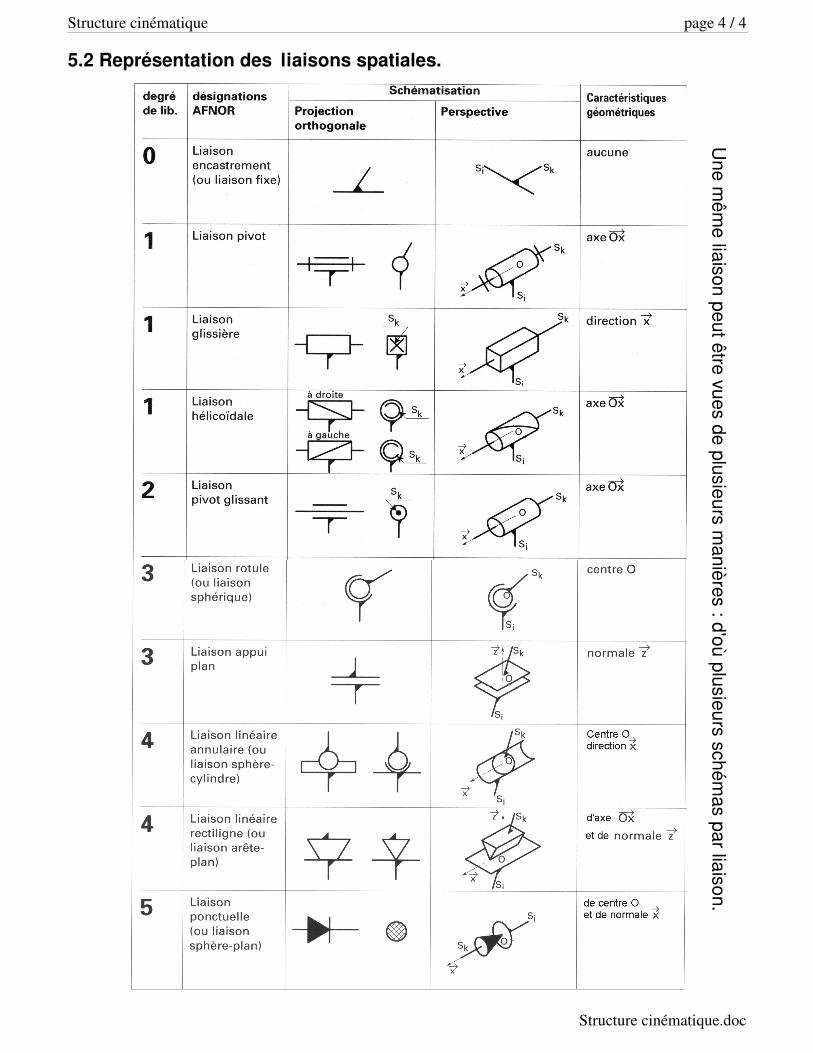
5.2 Représentation des liaisons spatiales.
Une m
ême liaison peut être vues de plusieurs m
anières : d'où plusieurs schémas par liaison.





























