Embed Size (px)
Citation preview
Académie d’Amiens Session 2004
Sciences et Technologies Industrielles Génie Electronique
SIEGE MOTORISE
POUR COUPE PEUGEOT 406
- Dossier technique - - Elève -
I R E I L L E R E N E T
YC E E S L
M G
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 2 sur 115
SOMMAIRE
1. INTRODUCTION :...........................................................................................................5 2. MISE EN SITUATION : ..................................................................................................6
2.1 REGLAGES ELECTRIQUES DU SIEGE CONDUCTEUR : ..................................................... 6 2.2 MEMORISATION DES POSITIONS ET RAPPEL D’UNE POSITION ....................................... 7
2.2.1 Mémorisation des positions de conduite............................................................ 7 2.2.2 Rappel d’une position mémorisée ...................................................................... 7
3. ENVIRONNEMENT DU SYSTEME..............................................................................8 3.1 DIAGRAMME D’ASSOCIATION...................................................................................... 8 3.2 DIAGRAMME SAGITTAL............................................................................................... 8
4. ANALYSE FONCTIONNELLE DE L’OBJET TECHNIQUE :................................10 4.1 FONCTION D’USAGE DE L’OBJET TECHNIQUE............................................................. 10 4.2 CAHIER DES CHARGES DE L’OBJET TECHNIQUE.......................................................... 11
5. Description des fonctions du siège 406 : .............................................................13 5.1 SCHEMA FONCTIONNEL DU SIEGE 406. ...................................................................... 13 5.2 FONCTION F1 : « GERER LE FONCTIONNEMENT DU SIEGE » ...................................... 14 5.3 FONCTION F2 : « ASSURER LE MOUVEMENT » .......................................................... 16 5.4 FONCTION F3 : « RECEVOIR LE CONDUCTEUR » ........................................................ 16
6. DESCRIPTION DES SOUS-FONCTIONS DE F1 « GÉRER LE FONCTIONNEMENT DU SIÈGE » : ..................................................................................17
6.1 SCHEMA FONCTIONNEL DE F1 « GERER LE FONCTIONNEMENT »............................... 17 6.2 FONCTION F11 : « ACQUERIR LA VITESSE DE ROTATION » ........................................ 19 6.3 FONCTION F12 : « ACQUERIR LES CONSIGNES »........................................................ 20 6.4 FONCTION F13 : « CALCULER LA POSITION COURANTE ».......................................... 21
6.4.1 Fonction F131 : « Détecter changement d’état sur les capteurs ».................. 22 6.4.2 Fonction F132 : « Sauvegarder les états des capteurs » ................................. 23 6.4.3 Fonction F133 : « Détecter le sens de rotation des moteurs » ........................ 23 6.4.4 Fonction F134 : « Déterminer le capteur modifié » ........................................ 24 6.4.5 Fonction F135 : « Modifier la variable position du capteur modifié » ........... 24
6.5 FONCTION F14 : « MEMORISER UNE POSITION » ....................................................... 25 6.6 FONCTION F15 : « GERER LA GRANDE VITESSE » ...................................................... 26 6.7 FONCTION F16 : « RAPPELER UNE POSITION » .......................................................... 27 6.8 FONCTION F17 : « ADAPTER EN PUISSANCE » ........................................................... 28
6.8.1 Fonction F171 : « Amplifier en puissance » .................................................... 29 6.8.2 Fonction F172 : « Distribuer l’énergie »......................................................... 30
6.9 FONCTION F18 : « PRODUIRE UN SIGNAL SONORE ».................................................. 31 6.9.1 Fonction F181 : « Produire le signal de commande» ..................................... 31 6.9.2 Fonction F182 : « Traduire la commande électrique en signal sonore »........ 31
6.10 FONCTION F1A : « ALIMENTER » ............................................................................. 32 7. DESCRIPTION DES SOUS-FONCTIONS DE F2 « ASSURER LE MOUVEMENT » : ..................................................................................................................33
7.1 PERSPECTIVE ECLATEE :............................................................................................ 34 7.2 SCHEMA CINEMATIQUE : ........................................................................................... 35 7.3 SCHEMA FONCTIONNEL DE F2 « ASSURER LE MOUVEMENT ».................................... 36 7.4 SCHEMA FONCTIONNEL DE F21 « ASSURER LE MOUVEMENT DE REHAUSSE » ........... 38
7.4.1 Fonction F212, F222, F232 et F242 : « Transformer l’énergie »................... 40 7.4.2 Fonctions F211, F221, F231 et F241 : « Protéger contre les surcharges » ... 40 7.4.3 Fonctions F213, F223, et F233 : « Réduire la vitesse » .................................. 41 7.4.4 Fonction F214 : « Modifier l’angle A,H,G » ................................................. 44
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 3 sur 115
7.4.5 Fonction F215 : « Modifier la hauteur du siège » .......................................... 44 7.5 SCHEMA FONCTIONNEL DE F22 « ASSURER LE MOUVEMENT DU DOSSIER» ............... 46 7.6 SCHEMA FONCTIONNEL DE F23 « ASSURER LE MOUVEMENT DE SITE » ..................... 48
7.6.1 Fonction F234 : « Modifier l’angle F, G, D » ............................................... 50 7.6.2 Fonction F235 : « Modifier l’inclinaison du siège »....................................... 50
7.7 SCHEMA FONCTIONNEL DE F24 « ASSURER LE MOUVEMENT DE LA GLISSIERE»........ 52 8. SCHEMAS STRUCTURELS :.....................................................................................54
8.1 FONCTIONS F11 « ACQUERIR LA VITESSE DE ROTATION » ET F12(PARTIEL) « ACQUERIR LES CONSIGNES » .............................................................................................. 55 8.2 FONCTIONS F13 « CALCULER LA POSITION COURANTE », F14 « MEMORISER LA POSITION COURANTE », F16 « RAPPELER UNE POSITION », F15 « GERER LA VITESSE GLISSIERE », F18 « PRODUIRE UN SIGNAL SONORE » ET F12(PARTIEL) « ACQUERIR LES CONSIGNES » ......................................................................................................................... 56 8.3 FONCTION F17 « ADAPTER EN PUISSANCE » ............................................................. 57
9. ALGORIGRAMMES : ...................................................................................................58 9.1 PROGRAMME PRINCIPAL DU SIEGE 406 ...................................................................... 58 9.2 SOUS-PROGRAMME « GV »....................................................................................... 60 9.3 SOUS-PROGRAMME « DETECT_SENS..................................................................... 61 9.4 PROGRAMME D’INTERRUPTION « CALCULER_LA_POSITION_COURANTE » .. 62 9.5 SOUS-PROGRAMME « DECREMENTER POS_GLI » .............................................. 63 9.6 SOUS-PROGRAMME « DECREMENTER POS_REHA » .......................................... 63 9.7 SOUS-PROGRAMME « DECREMENTER POS_SITE » ............................................ 64 9.8 SOUS-PROGRAMME « DECREMENTER POS_DOS »............................................. 64 9.9 SOUS-PROGRAMME « INCREMENTER POS_GLI » ............................................... 65 9.10 SOUS-PROGRAMME « INCREMENTER POS_REHA » ........................................... 65 9.11 SOUS-PROGRAMME « INCREMENTER POS_SITE ».............................................. 66 9.12 SOUS-PROGRAMME « INCREMENTER POS_DOS» ............................................... 66 9.13 SOUS-PROGRAMME « PROD_SIGN_SONORE »..................................................... 67 9.14 SOUS-PROGRAMME « TEMPO » ............................................................................... 68
10. Programmes : ...............................................................................................................69 10.15 SOUS PROGRAMME GESTION GRANDE VITESSE : GV ............................................. 69 10.16 SOUS PROGRAMME DETECTION DE LA DIRECTION : DETECT_SENS ................... 72 10.17 PROGRAMME D’INTERRUPTION : CALCULER LA POSITION COURANTE ................... 74 10.18 SOUS PROGRAMME PRODUIRE UNE SIGNAL SONORE : PROD_SIGN_SONORE ... 77 10.19 SOUS PROGRAMME TEMPORISATION : TEMPO..................................................... 77 10.20 SOUS PROGRAMMES DE DECREMENTATION DE LA POSITION COURANTE : DEC_POS_MVT.................................................................................................................. 78 10.21 SOUS PROGRAMMES D’INCREMENTATION DE LA POSITION COURANTE : INC_POS_MVT................................................................................................................... 79 10.22 SOUS PROGRAMMES DE MEMORISATION DES POSITIONS COURANTES : MEM1 ET MEM2 .............................................................................................................................. 80 10.23 SOUS PROGRAMMES DE MEMORISATION DE LA POSITION COURANTE DE LA GLISSIERE : MEM_POS_COUR_GLI .................................................................................. 88 10.24 RECUPERATION DES POSITIONS MEMORISEES ........................................................ 89 10.25 DECLARATION DE LA ZONE EEPROM .................................................................. 96 10.26 SOUS PROGRAMME ECRITURE EN EEPROM : ECR_EEPROM............................. 97 10.27 SOUS PROGRAMME D’INITIALISATION : INIT ........................................................ 98 10.28 SOUS PROGRAMME VARIABLES ........................................................................... 102 10.29 SOUS PROGRAMME DECLARATIONS .................................................................... 104
11. documents de fabrication : .....................................................................................107
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 4 sur 115
11.1 CARTE DE SORTIE : ........................................................................................... 107 11.1.1 Carte de sortie - schéma structurel :.............................................................. 107 11.1.2 Carte de sortie-implantation des composants :.............................................. 109 11.1.3 Carte de sortie-côté cuivre :........................................................................... 109 11.1.4 Carte de sortie-côté composants :.................................................................. 110 11.1.5 Carte de sortie - nomenclature : .................................................................... 111
11.2 CARTE PIC : ......................................................................................................... 112 11.2.1 Carte PIC - schéma structurel : ..................................................................... 112 11.2.2 Carte PIC - implantation des composants :................................................... 113 11.2.3 Carte PIC - côté cuivre :................................................................................ 113 11.2.4 Carte PIC - côté composant :......................................................................... 114 11.2.5 Carte PIC - nomenclature :............................................................................ 115

I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 5 sur 115
1. INTRODUCTION : Certaines versions du coupé Peugeot 406 proposent des automatismes
intégrés à l’habitacle : - ordinateur de bord - rétroviseur électrique - siège électrique C’est l’automatisme siège électrique que nous allons étudier dans ce
dossier : nous le nommerons « siège 406 ».
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 6 sur 115
2. MISE EN SITUATION : Ce siège 406, en option, a été conçu pour optimiser le confort du conducteur.
Le siège a été dessiné en tenant compte de la morphologie humaine et des contraintes ergonomiques liées à son utilisation.
Son utilisation est la suivante (extrait du guide d’utilisation du coupé Peugeot
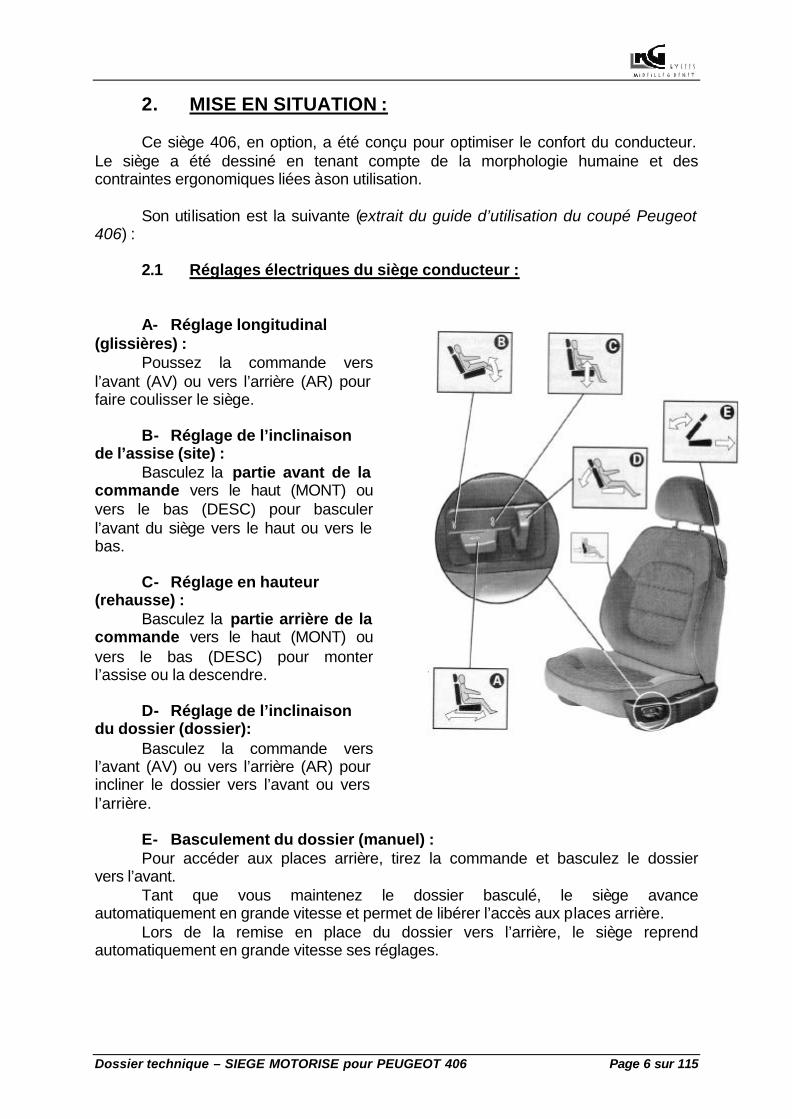
406) : 2.1 Réglages électriques du siège conducteur : A- Réglage longitudinal
(glissières) : Poussez la commande vers
l’avant (AV) ou vers l’arrière (AR) pour faire coulisser le siège.
B- Réglage de l’inclinaison
de l’assise (site) : Basculez la partie avant de la
commande vers le haut (MONT) ou vers le bas (DESC) pour basculer l’avant du siège vers le haut ou vers le bas.
C- Réglage en hauteur
(rehausse) : Basculez la partie arrière de la
commande vers le haut (MONT) ou vers le bas (DESC) pour monter l’assise ou la descendre.
D- Réglage de l’inclinaison
du dossier (dossier): Basculez la commande vers
l’avant (AV) ou vers l’arrière (AR) pour incliner le dossier vers l’avant ou vers l’arrière.
E- Basculement du dossier (manuel) : Pour accéder aux places arrière, tirez la commande et basculez le dossier
vers l’avant. Tant que vous maintenez le dossier basculé, le siège avance
automatiquement en grande vitesse et permet de libérer l’accès aux places arrière. Lors de la remise en place du dossier vers l’arrière, le siège reprend
automatiquement en grande vitesse ses réglages.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 7 sur 115
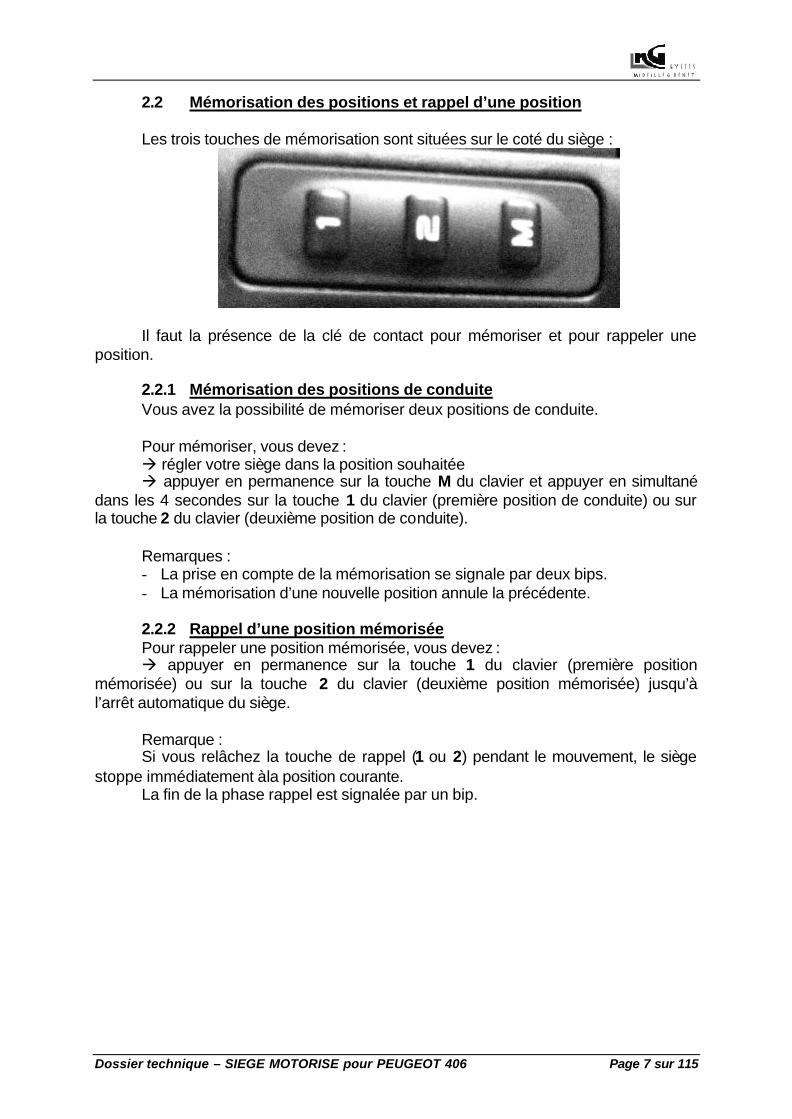
2.2 Mémorisation des positions et rappel d’une position Les trois touches de mémorisation sont situées sur le coté du siège :
Il faut la présence de la clé de contact pour mémoriser et pour rappeler une
position. 2.2.1 Mémorisation des positions de conduite Vous avez la possibilité de mémoriser deux positions de conduite. Pour mémoriser, vous devez : à régler votre siège dans la position souhaitée à appuyer en permanence sur la touche M du clavier et appuyer en simultané
dans les 4 secondes sur la touche 1 du clavier (première position de conduite) ou sur la touche 2 du clavier (deuxième position de conduite).
Remarques : - La prise en compte de la mémorisation se signale par deux bips. - La mémorisation d’une nouvelle position annule la précédente. 2.2.2 Rappel d’une position mémorisée Pour rappeler une position mémorisée, vous devez : à appuyer en permanence sur la touche 1 du clavier (première position
mémorisée) ou sur la touche 2 du clavier (deuxième position mémorisée) jusqu’à l’arrêt automatique du siège.
Remarque : Si vous relâchez la touche de rappel (1 ou 2) pendant le mouvement, le siège
stoppe immédiatement à la position courante. La fin de la phase rappel est signalée par un bip.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 8 sur 115
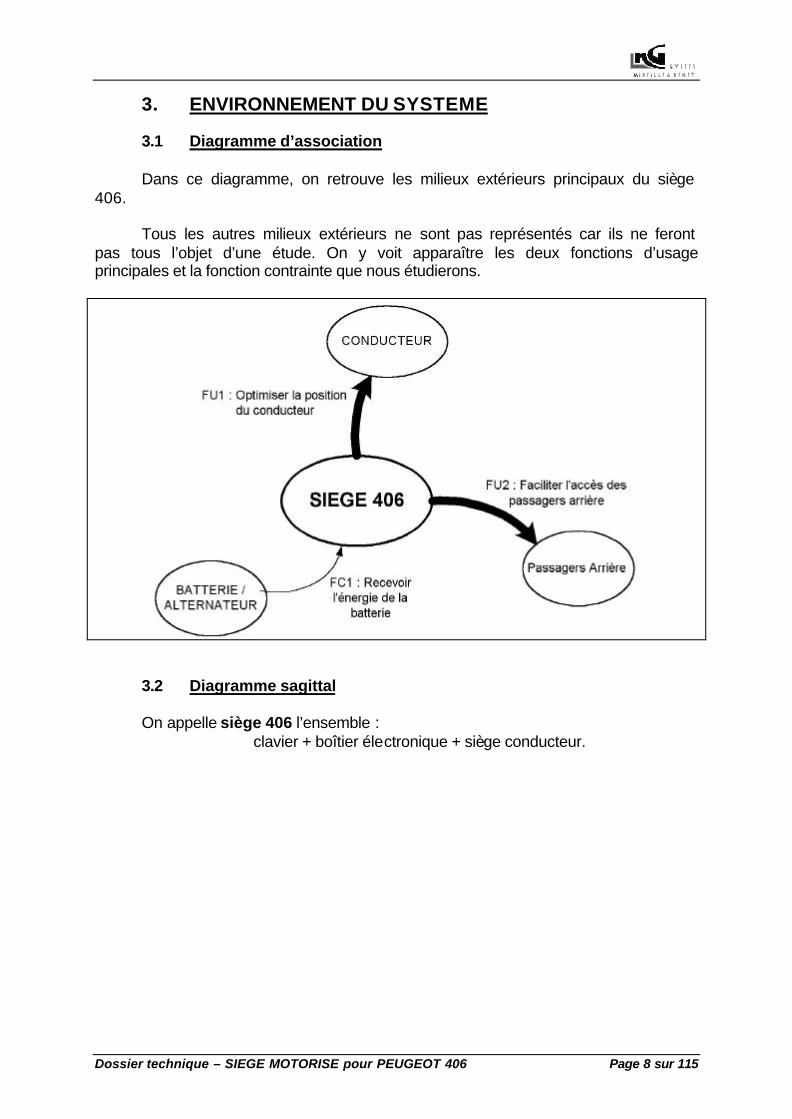
3. ENVIRONNEMENT DU SYSTEME 3.1 Diagramme d’association
Dans ce diagramme, on retrouve les milieux extérieurs principaux du siège
406. Tous les autres milieux extérieurs ne sont pas représentés car ils ne feront
pas tous l’objet d’une étude. On y voit apparaître les deux fonctions d’usage principales et la fonction contrainte que nous étudierons.
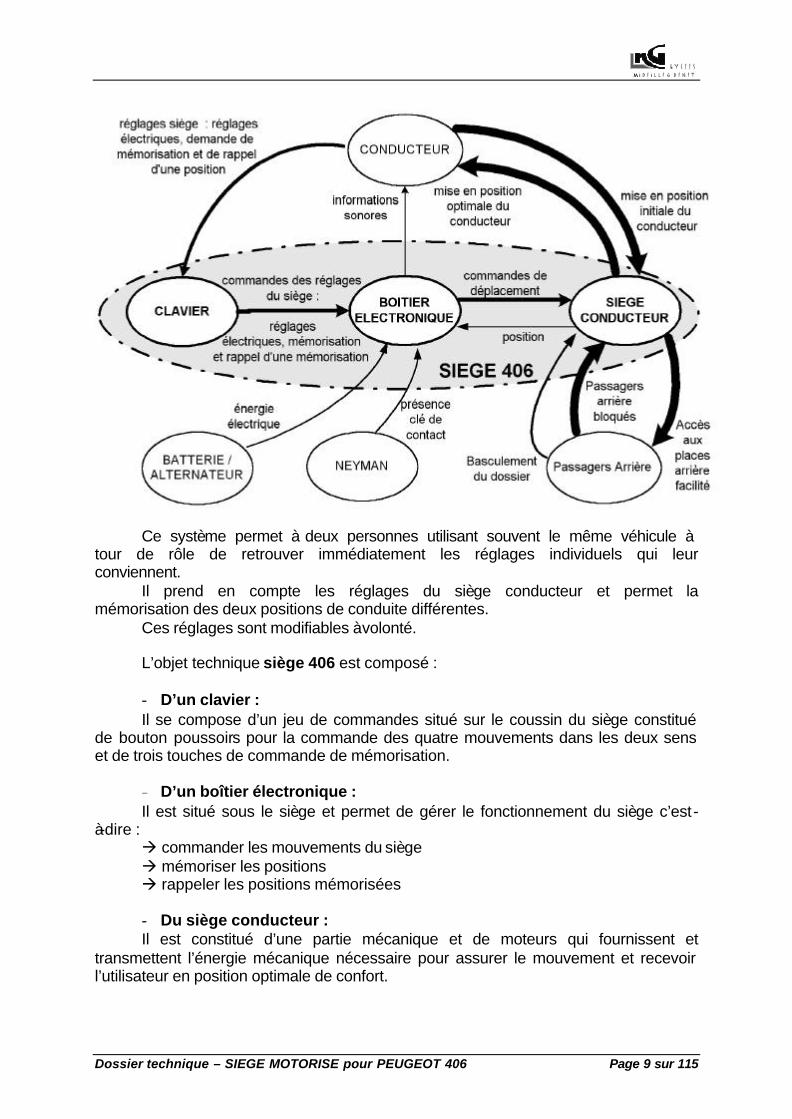
3.2 Diagramme sagittal On appelle siège 406 l’ensemble :
clavier + boîtier électronique + siège conducteur.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 9 sur 115
Ce système permet à deux personnes utilisant souvent le même véhicule à tour de rôle de retrouver immédiatement les réglages individuels qui leur conviennent.
Il prend en compte les réglages du siège conducteur et permet la mémorisation des deux positions de conduite différentes.
Ces réglages sont modifiables à volonté. L’objet technique siège 406 est composé : - D’un clavier : Il se compose d’un jeu de commandes situé sur le coussin du siège constitué
de bouton poussoirs pour la commande des quatre mouvements dans les deux sens et de trois touches de commande de mémorisation.
− D’un boîtier électronique : Il est situé sous le siège et permet de gérer le fonctionnement du siège c’est-
à-dire : à commander les mouvements du siège à mémoriser les positions à rappeler les positions mémorisées - Du siège conducteur : Il est constitué d’une partie mécanique et de moteurs qui fournissent et
transmettent l’énergie mécanique nécessaire pour assurer le mouvement et recevoir l’utilisateur en position optimale de confort.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 10 sur 115
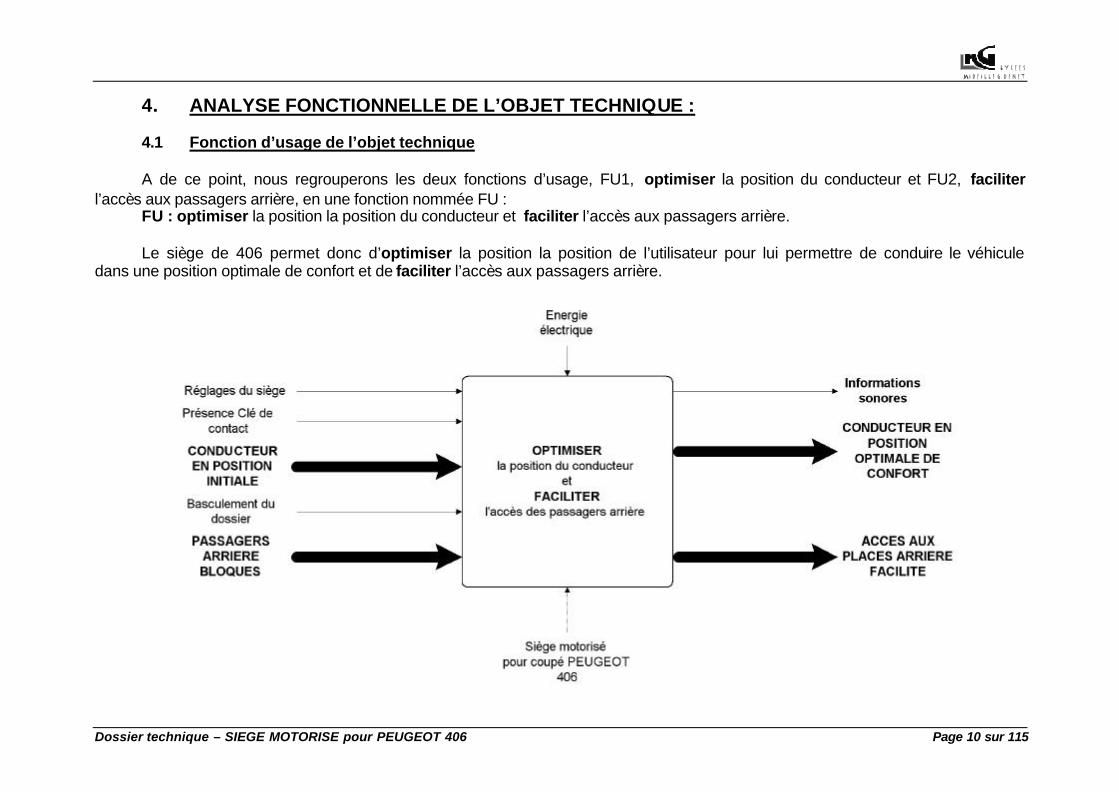
4. ANALYSE FONCTIONNELLE DE L’OBJET TECHNIQUE : 4.1 Fonction d’usage de l’objet technique A de ce point, nous regrouperons les deux fonctions d’usage, FU1, optimiser la position du conducteur et FU2, faciliter
l’accès aux passagers arrière, en une fonction nommée FU : FU : optimiser la position la position du conducteur et faciliter l’accès aux passagers arrière. Le siège de 406 permet donc d’optimiser la position la position de l’utilisateur pour lui permettre de conduire le véhicule
dans une position optimale de confort et de faciliter l’accès aux passagers arrière.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 11 sur 115
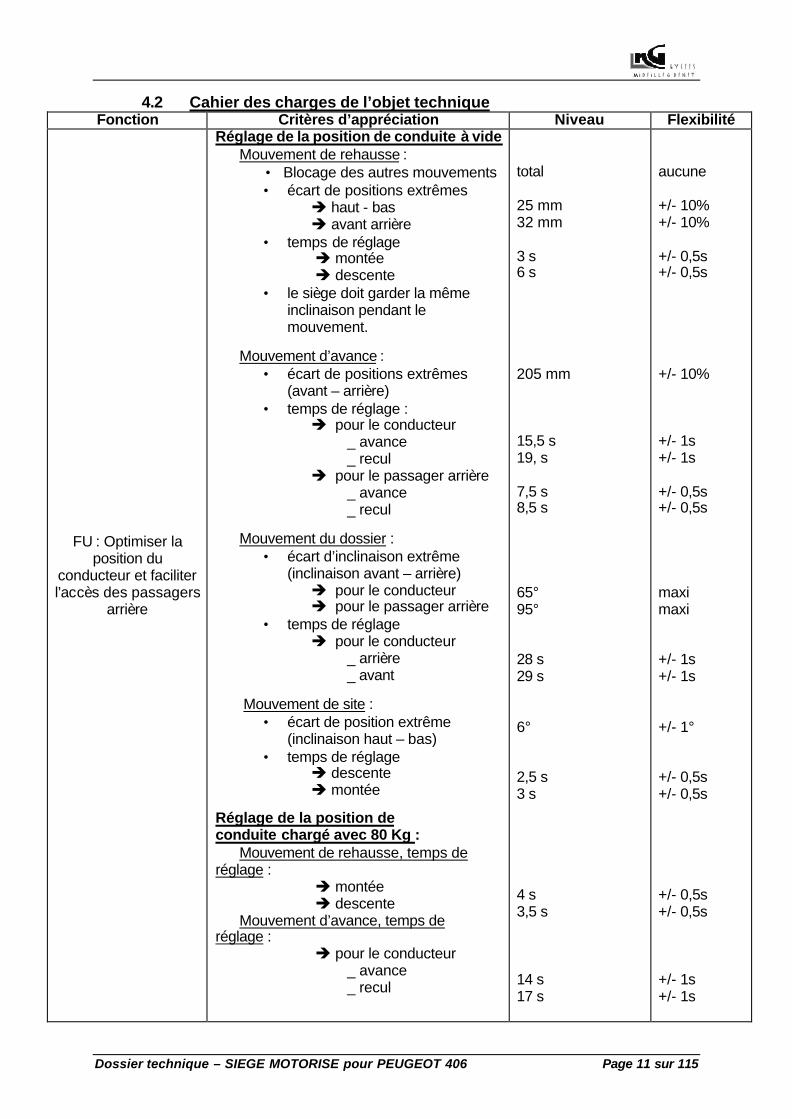
4.2 Cahier des charges de l’objet technique Fonction Critères d’appréciation Niveau Flexibilité
FU : Optimiser la position du
conducteur et faciliter l’accès des passagers
arrière
Réglage de la position de conduite à vide Mouvement de rehausse :
• Blocage des autres mouvements • écart de positions extrêmes è haut - bas è avant arrière • temps de réglage è montée
è descente • le siège doit garder la même
inclinaison pendant le mouvement.
Mouvement d’avance : • écart de positions extrêmes
(avant – arrière) • temps de réglage :
è pour le conducteur _ avance _ recul
è pour le passager arrière _ avance _ recul
Mouvement du dossier : • écart d’inclinaison extrême
(inclinaison avant – arrière) è pour le conducteur è pour le passager arrière
• temps de réglage è pour le conducteur _ arrière _ avant
Mouvement de site : • écart de position extrême
(inclinaison haut – bas) • temps de réglage è descente è montée
Réglage de la position de conduite chargé avec 80 Kg : Mouvement de rehausse, temps de réglage :
è montée è descente Mouvement d’avance, temps de réglage :
è pour le conducteur _ avance _ recul
total 25 mm 32 mm 3 s 6 s 205 mm 15,5 s 19, s 7,5 s 8,5 s 65° 95° 28 s 29 s 6° 2,5 s 3 s 4 s 3,5 s 14 s 17 s
aucune +/- 10% +/- 10% +/- 0,5s +/- 0,5s +/- 10% +/- 1s +/- 1s +/- 0,5s +/- 0,5s maxi maxi +/- 1s +/- 1s +/- 1° +/- 0,5s +/- 0,5s +/- 0,5s +/- 0,5s +/- 1s +/- 1s
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 12 sur 115
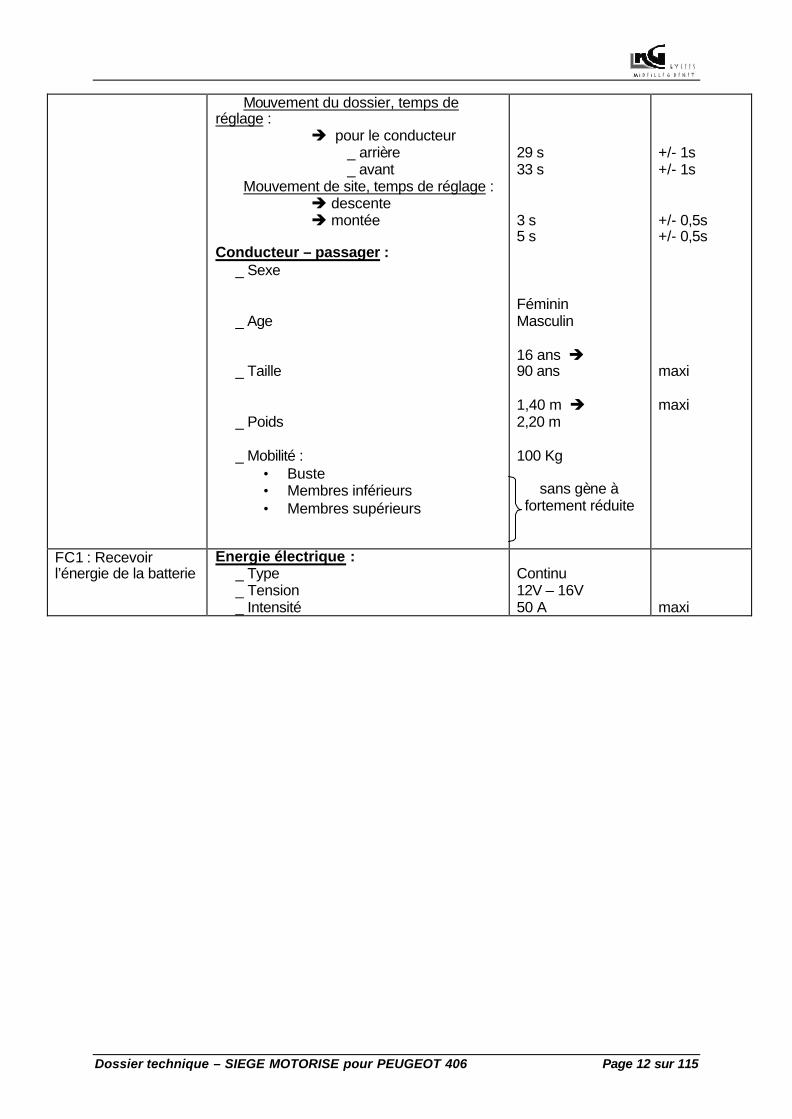
Mouvement du dossier, temps de réglage :
è pour le conducteur _ arrière _ avant
Mouvement de site, temps de réglage : è descente è montée
Conducteur – passager : _ Sexe _ Age _ Taille _ Poids _ Mobilité :
• Buste • Membres inférieurs • Membres supérieurs
29 s 33 s 3 s 5 s Féminin Masculin 16 ans è 90 ans 1,40 m è 2,20 m 100 Kg
sans gène à fortement réduite
+/- 1s +/- 1s +/- 0,5s +/- 0,5s maxi maxi
FC1 : Recevoir l’énergie de la batterie
Energie électrique : _ Type _ Tension _ Intensité
Continu 12V – 16V 50 A
maxi
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 13 sur 115
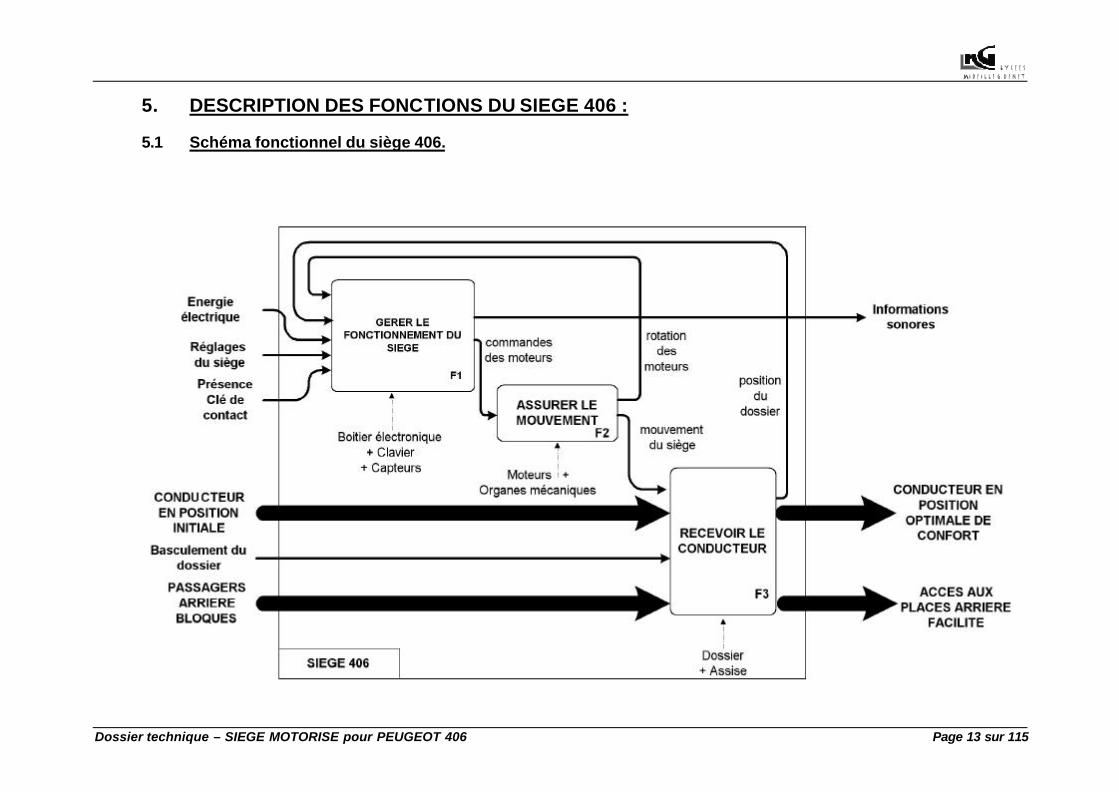
5. DESCRIPTION DES FONCTIONS DU SIEGE 406 : 5.1 Schéma fonctionnel du siège 406.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 14 sur 115
5.2 Fonction F1 : « Gérer le fonctionnement du siège » Entrées : Energie électrique : différence de potentiel +12V fournie par la batterie ou
par l’alternateur Réglages du siège : action manuelle du conducteur sur :
- des boutons poussoirs pour le réglage des différents mouvements - trois touches (1, 2 et M) pour la mémorisation et le rappel d’une position.
Présence clé de contact : différence de potentiel image de la présence de la clé de contact tournée : +12V : clé de contact présente et tournée ; 0V : clé de contact absente. Lorsque la clé de contact est absente, on ne peut pas mémoriser la position courante et rappeler une position mémorisée.
Rotation des moteurs : vitesses de rotation à partir desquelles le calcul de la position courante sera réalisé.
Position du dossier : - soit le dossier est en position avant (basculé). - soit le dossier est en position arrière (en place). Sorties : Commandes des moteurs : différences de potentiels analogiques permettant
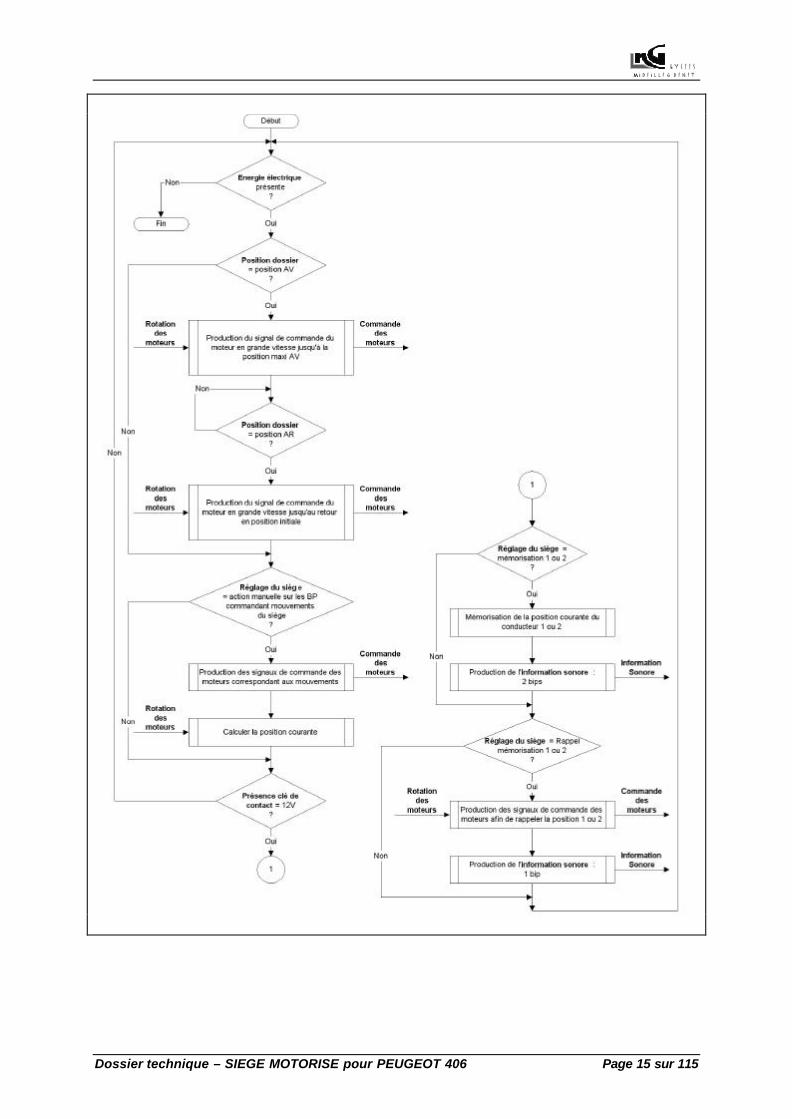
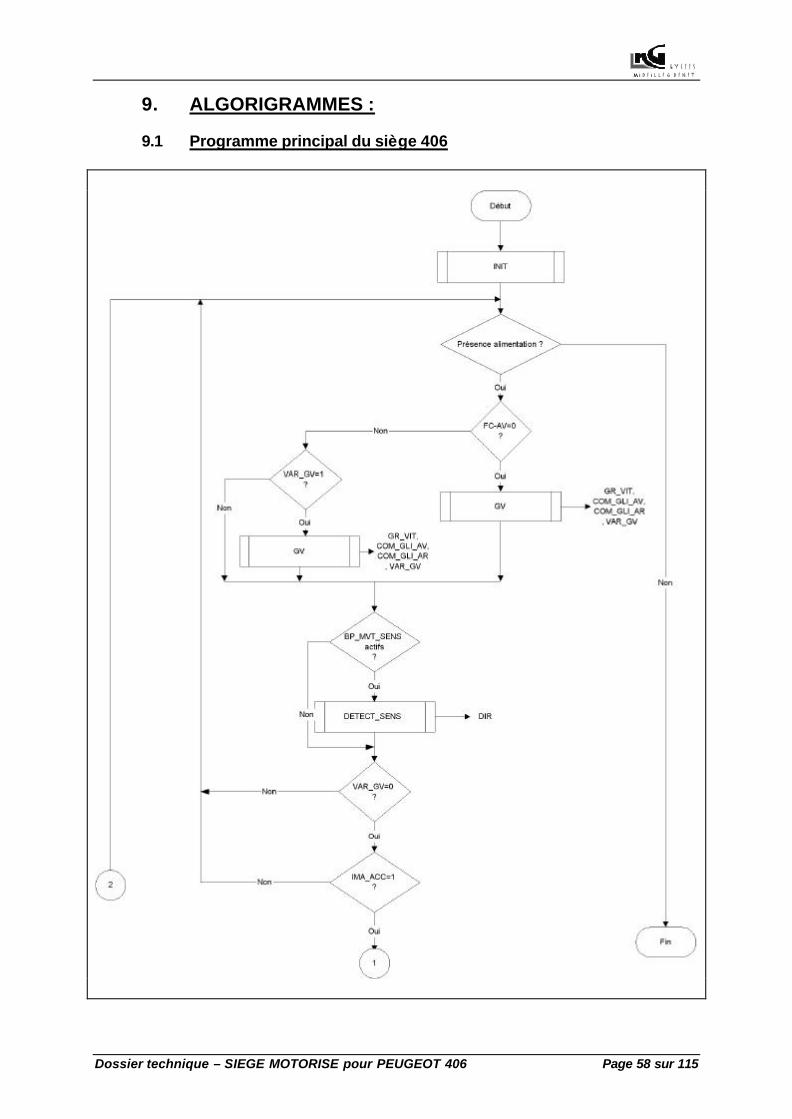
de commander les moteurs conformément aux réglages demandés. +12V : commande du moteur dans le sens positif (AV, MONT), -12V : commande du moteur dans le sens négatif (AR, DESC), 0V : arrêt du moteur. Informations sonores : 2 bips: indique que la mémorisation est prise en compte, 1 bip : indique que la phase de rappel est terminée. Fonction de transfert : F1 permet de produire les différences de potentiels de commande des
moteurs en fonction des réglages demandés par le conducteur. L’algorigramme page suivante présente la fonction de transfert de F1 : « Gérer
le fonctionnement du siège ».
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 15 sur 115
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 16 sur 115
5.3 Fonction F2 : « Assurer le mouvement » Entrées : Commandes des moteurs : différences de potentiels analogiques permettant
de commander les moteurs conformément aux réglages demandés. +12V : commande du moteur dans le sens positif (AV, MONT), -12V : commande du moteur dans le sens négatif (AR, DESC), 0V : arrêt du moteur. Sorties : Rotation des moteurs : vitesses de rotation à partir desquelles le calcul de l a
position courante sera réalisé. Mouvement du siège : déplacement physique du siège Fonction de transfert : F2 permet de déplacer mécaniquement le siège en fonction des commandes
électriques des moteurs. 5.4 Fonction F3 : « Recevoir le conducteur » Entrées : Mouvement du siège : déplacement physique du siège Conducteur en position initiale : position du conducteur lors de sa mise en
place sur le siège. Basculement du siège : action manuelle sur le dossier du siège vers la
position avant Sorties : Conducteur en position optimale de confort : position du conducteur après
réglages électriques ou rappel de mémorisation. Position du dossier : - soit le dossier est en position avant (basculé). - soit le dossier est en position arrière (en place). Fonction de transfert : F3 permet d’optimiser la position du conducteur à partir du mouvement du
siège fourni par F2 « Assurer le mouvement ».
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 17 sur 115
6. DESCRIPTION DES SOUS-FONCTIONS DE F1 « GÉRER LE FONCTIONNEMENT DU SIÈGE » :
Notation pour le tout le dossier : L’indication MVT renvoie d’une manière générale aux 4
déplacements du siège à savoir GLI, REHA, SITE et DOS. - On parlera de MVT pour parler d’un des signaux des quatre mouvements que sont GLI pour glissière, REHA pour rehausse, SITE pour site et DOS pour dossier.
Ex : POS_MVT désigne les 4 signaux POS_GLI, POS_DOS, … - On utilisera SENS pour citer un des deux sens de chaque
mouvement, à savoir AV pour avant ou AR pour arrière et MONT pour montée ou DESC pour descente.
Exemple : les signaux POS_GLI_SENS sont les signaux
POS_GLI_AV et POS_GLI_AR. 6.1 Schéma fonctionnel de F1 « Gérer le fonctionnement » Voir page suivante
I R E I L L E R E N E T
Y C E E S L
M G
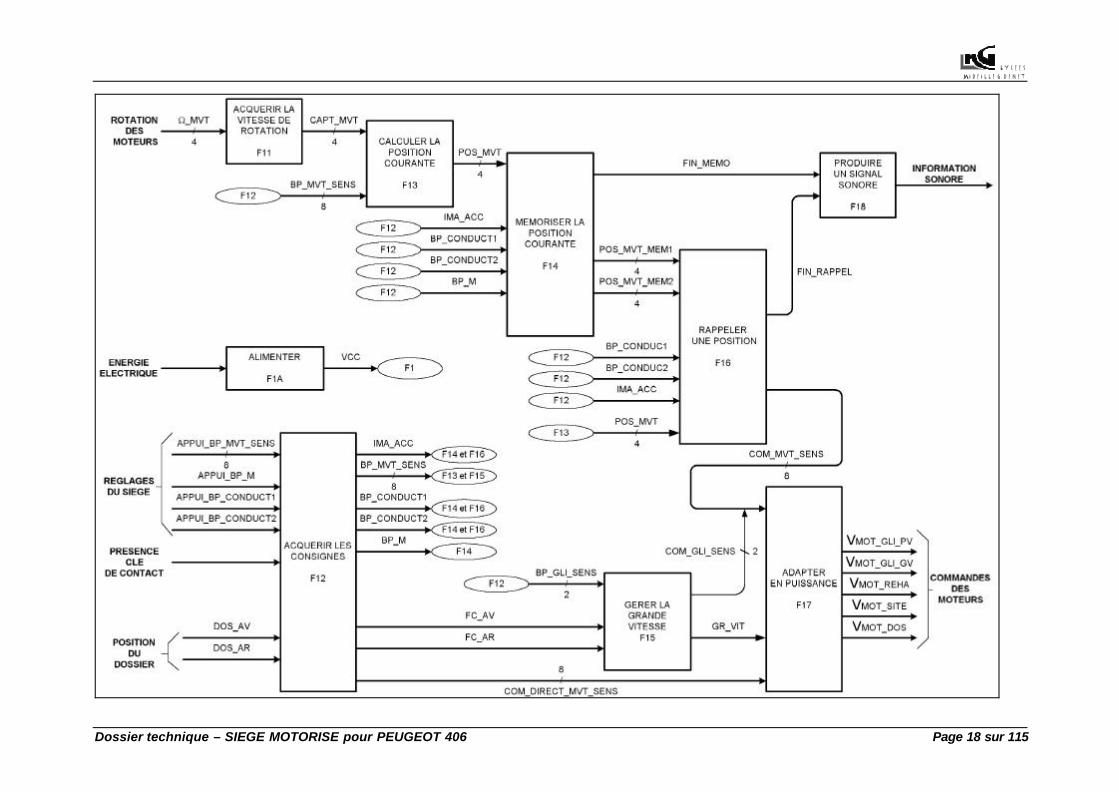
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 18 sur 115
I R E I L L E R E N E T
Y C E E S L
M G
Dossi er technique – SIEGE MOTORISE pour PEUGEOT 406 Page 19 sur 115
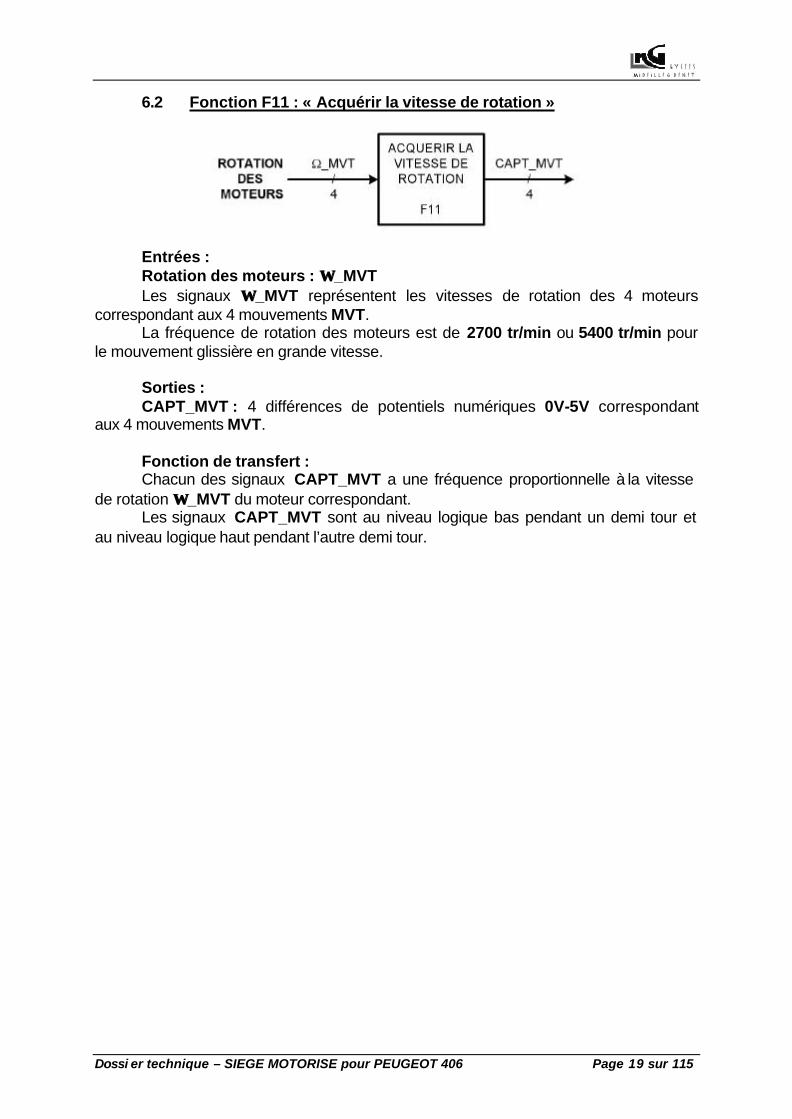
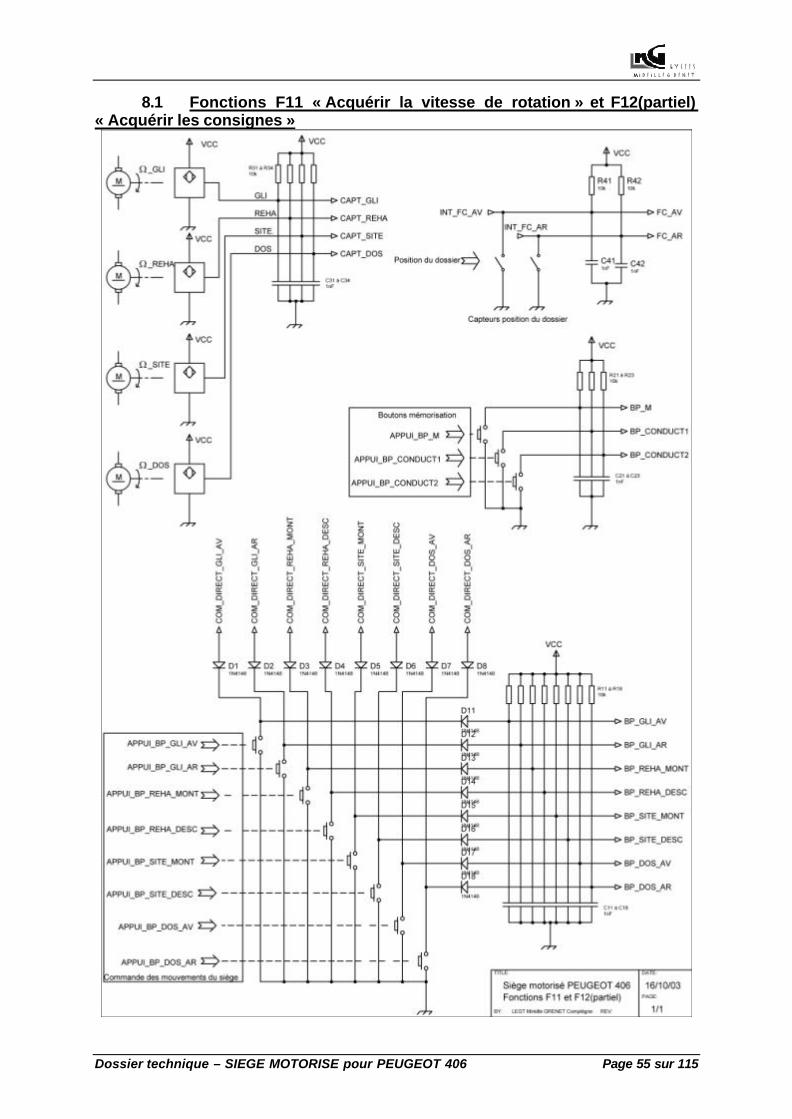
6.2 Fonction F11 : « Acquérir la vitesse de rotation »
Entrées : Rotation des moteurs : ΩΩ _MVT Les signaux ΩΩ _MVT représentent les vitesses de rotation des 4 moteurs
correspondant aux 4 mouvements MVT. La fréquence de rotation des moteurs est de 2700 tr/min ou 5400 tr/min pour
le mouvement glissière en grande vitesse. Sorties : CAPT_MVT : 4 différences de potentiels numériques 0V-5V correspondant
aux 4 mouvements MVT. Fonction de transfert : Chacun des signaux CAPT_MVT a une fréquence proportionnelle à la vitesse
de rotation ΩΩ _MVT du moteur correspondant. Les signaux CAPT_MVT sont au niveau logique bas pendant un demi tour et
au niveau logique haut pendant l’autre demi tour.
I R E I L L E R E N E T
Y C E E S L
M G
Dossi er technique – SIEGE MOTORISE pour PEUGEOT 406 Page 20 sur 115
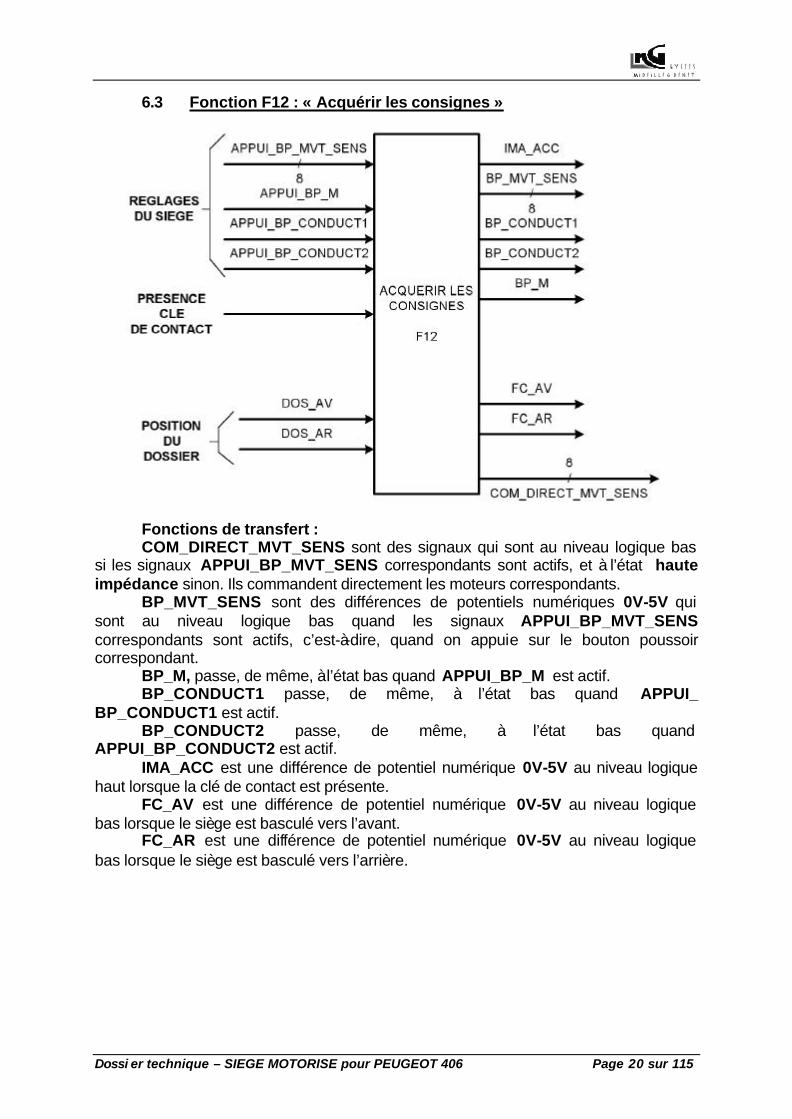
6.3 Fonction F12 : « Acquérir les consignes »
Fonctions de transfert : COM_DIRECT_MVT_SENS sont des signaux qui sont au niveau logique bas
si les signaux APPUI_BP_MVT_SENS correspondants sont actifs, et à l’état haute impédance sinon. Ils commandent directement les moteurs correspondants.
BP_MVT_SENS sont des différences de potentiels numériques 0V-5V qui sont au niveau logique bas quand les signaux APPUI_BP_MVT_SENS correspondants sont actifs, c’est-à-dire, quand on appuie sur le bouton poussoir correspondant.
BP_M, passe, de même, à l’état bas quand APPUI_BP_M est actif. BP_CONDUCT1 passe, de même, à l’état bas quand APPUI_
BP_CONDUCT1 est actif. BP_CONDUCT2 passe, de même, à l’état bas quand
APPUI_BP_CONDUCT2 est actif. IMA_ACC est une différence de potentiel numérique 0V-5V au niveau logique
haut lorsque la clé de contact est présente. FC_AV est une différence de potentiel numérique 0V-5V au niveau logique
bas lorsque le siège est basculé vers l’avant. FC_AR est une différence de potentiel numérique 0V-5V au niveau logique
bas lorsque le siège est basculé vers l’arrière.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PE UGEOT 406 Page 21 sur 115
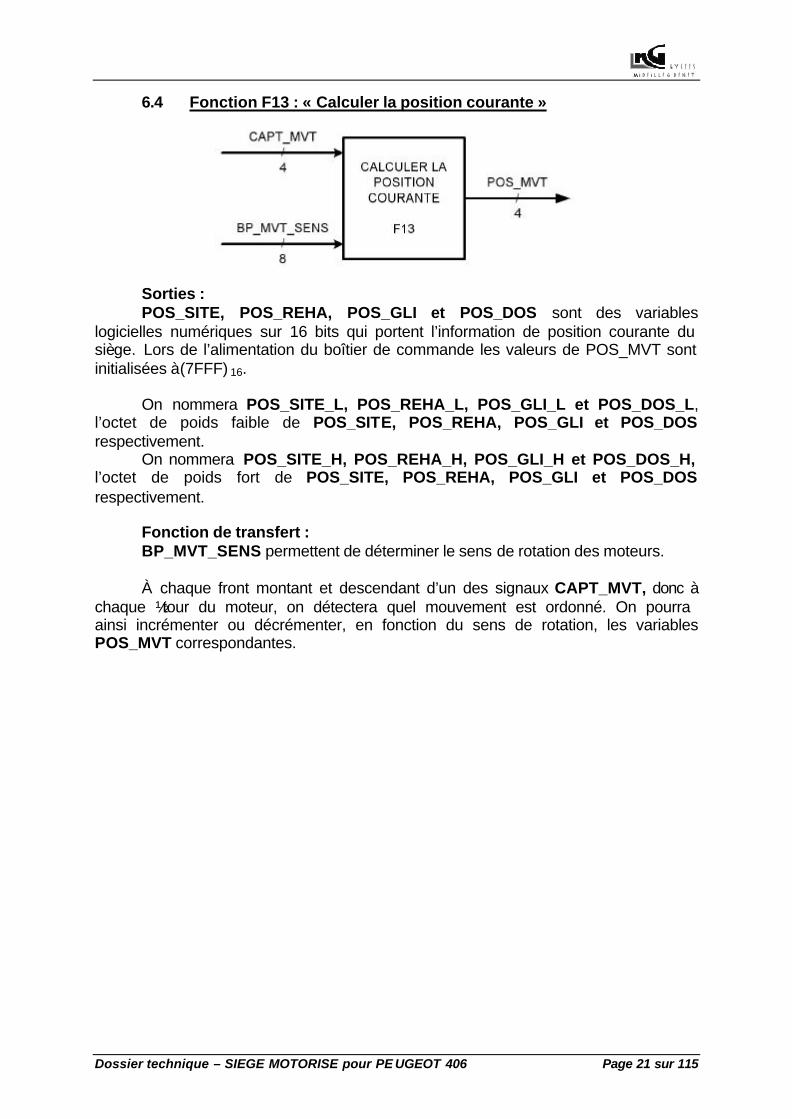
6.4 Fonction F13 : « Calculer la position courante »
Sorties : POS_SITE, POS_REHA, POS_GLI et POS_DOS sont des variables
logicielles numériques sur 16 bits qui portent l’information de position courante du siège. Lors de l’alimentation du boîtier de commande les valeurs de POS_MVT sont initialisées à (7FFF) 16.
On nommera POS_SITE_L, POS_REHA_L, POS_GLI_L et POS_DOS_L,
l’octet de poids faible de POS_SITE, POS_REHA, POS_GLI et POS_DOS respectivement.
On nommera POS_SITE_H, POS_REHA_H, POS_GLI_H et POS_DOS_H, l’octet de poids fort de POS_SITE, POS_REHA, POS_GLI et POS_DOS respectivement.
Fonction de transfert : BP_MVT_SENS permettent de déterminer le sens de rotation des moteurs. À chaque front montant et descendant d’un des signaux CAPT_MVT, donc à
chaque ½ tour du moteur, on détectera quel mouvement est ordonné. On pourra ainsi incrémenter ou décrémenter, en fonction du sens de rotation, les variables POS_MVT correspondantes.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 22 sur 115
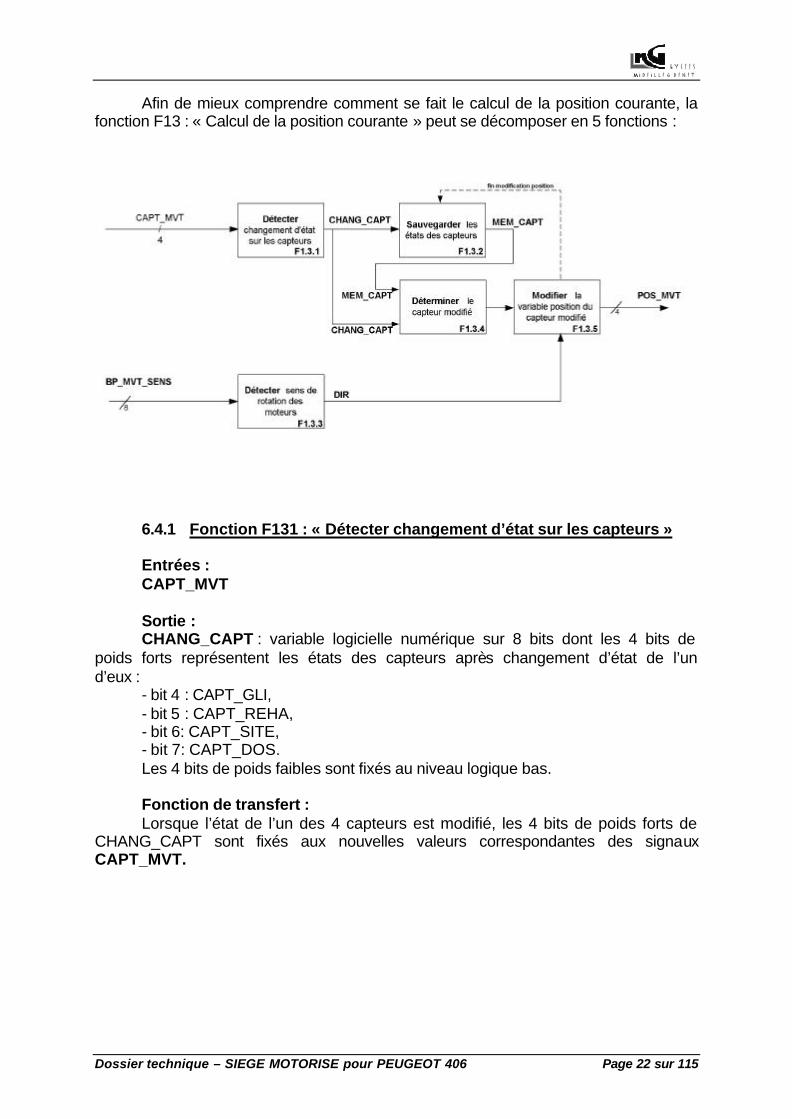
Afin de mieux comprendre comment se fait le calcul de la position courante, la fonction F13 : « Calcul de la position courante » peut se décomposer en 5 fonctions :
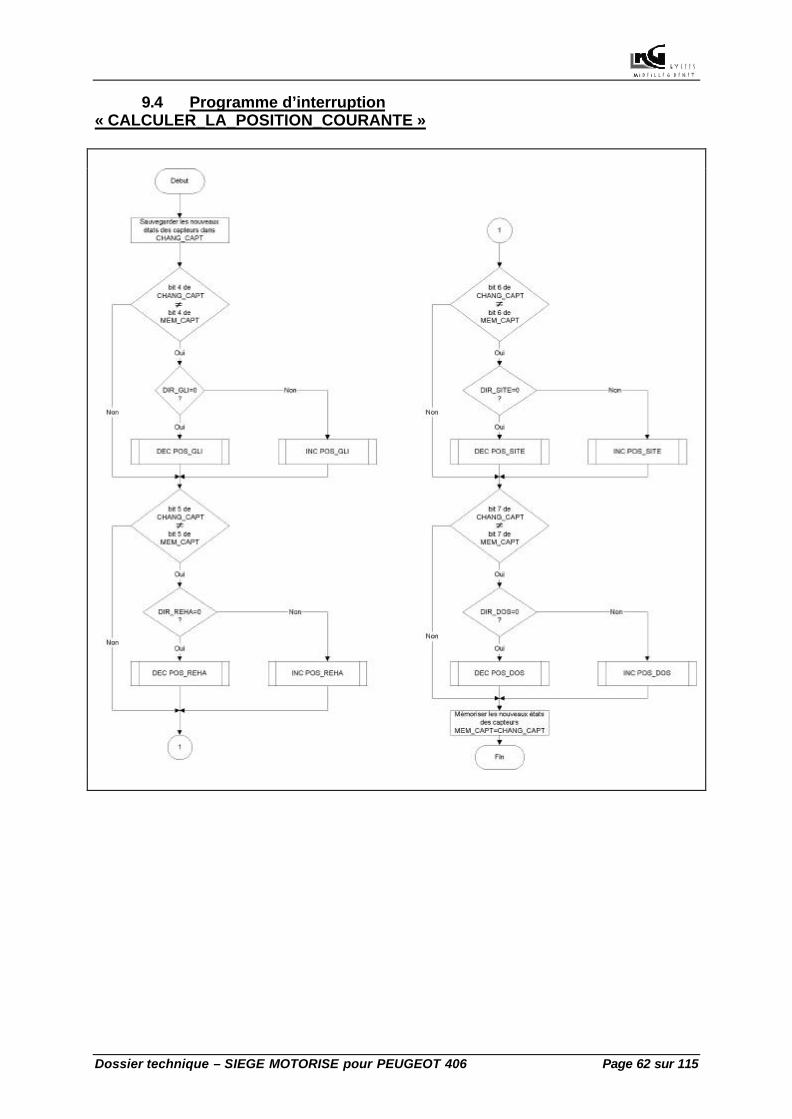
6.4.1 Fonction F131 : « Détecter changement d’état sur les capteurs » Entrées : CAPT_MVT Sortie : CHANG_CAPT : variable logicielle numérique sur 8 bits dont les 4 bits de
poids forts représentent les états des capteurs après changement d’état de l’un d’eux :
- bit 4 : CAPT_GLI, - bit 5 : CAPT_REHA, - bit 6: CAPT_SITE, - bit 7: CAPT_DOS. Les 4 bits de poids faibles sont fixés au niveau logique bas. Fonction de transfert : Lorsque l’état de l’un des 4 capteurs est modifié, les 4 bits de poids forts de
CHANG_CAPT sont fixés aux nouvelles valeurs correspondantes des signaux CAPT_MVT.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 23 sur 115
6.4.2 Fonction F132 : « Sauvegarder les états des capteurs » Entrées : CHANG_CAPT, fin modification position Sortie : MEM_CAPT : variable logicielle numérique sur 8 bits dont les 4 bits de poids
forts représentent les états des capteurs avant un changement d’état de l’un d’eux. - bit 4 : CAPT_GLI, - bit 5 : CAPT_REHA, - bit 6: CAPT_SITE - bit 7: CAPT_DOS. Les 4 bits de poids faibles sont fixes au niveau logique bas. Fonction de transfert : À l’initialisation, les 4 bits de poids forts de la variable MEM_CAPT seront
fixés aux valeurs correspondantes de CAPT_MVT. Après modification de la variable position POS_MVT, on sauvegarde la valeur
de la variable CHANG_CAPT (nouveaux états de CAPT_MVT) dans la variable MEM_CAPT.
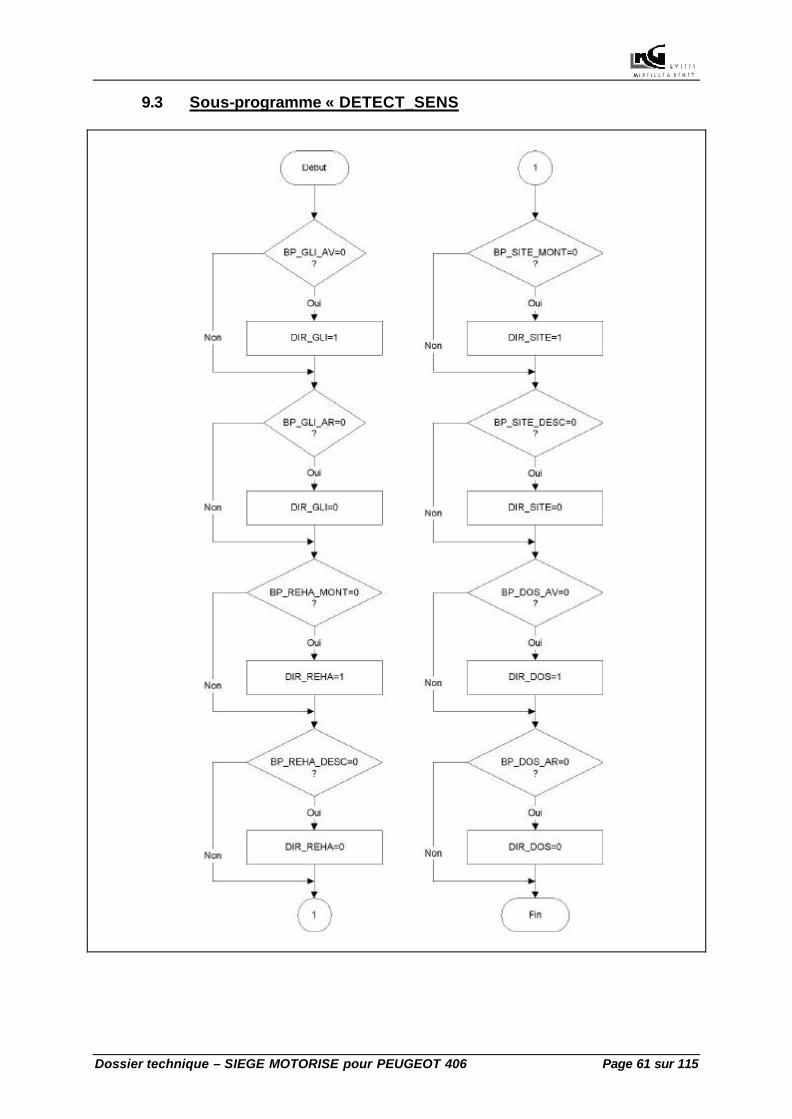
6.4.3 Fonction F133 : « Détecter le sens de rotation des moteurs » Entrées : BP_MVT_SENS Sortie : DIR : variable logicielle numérique sur 8 bits dont les 4 bits de poids faibles
représentent le sens de rotation des 4 moteurs. - bit 0 : sens de rotation glissière (DIR_GLI), - bit 1 : sens de rotation rehausse (DIR_REHA), - bit 2 : sens de rotation site (DIR_SITE), - bit 3 : sens de rotation dossier (DIR_DOS). Fonction de transfert : Lorsqu’un bouton du type BP_MVT_AV ou BP_MVT_MONT est activé, le bit
de la variable DIR correspondant au mouvement est fixé au niveau logique haut. Dans le cas contraire (bouton du type BP_MVT_AR ou BP_MVT_DESC) il est
fixé au niveau logique bas.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 24 sur 115
6.4.4 Fonction F134 : « Déterminer le capteur modifié » Entrées : MEM_CAPT, CHANG_CAPT Sortie : indication de la variable modifiée, Fonction de transfert : Permet de comparer les variables MEM_CAPT et CHANG_CAPT et
d’indiquer à la fonction F135 « Modifier la variable position correspondante », quel est le capteur CAPT_MVT qui a été modifié, et donc, quel mouvement est en cours.
6.4.5 Fonction F135 : « Modifier la variable position du capteur modifié » Entrées : indication de la variable modifiée, DIR Sorties : POS_MVT Fonction de transfert : Permet d’incrémenter ou décrémenter la variable position courante en
fonction : - de la valeur de la variable DIR, - et du mouvement en cours.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 25 sur 115
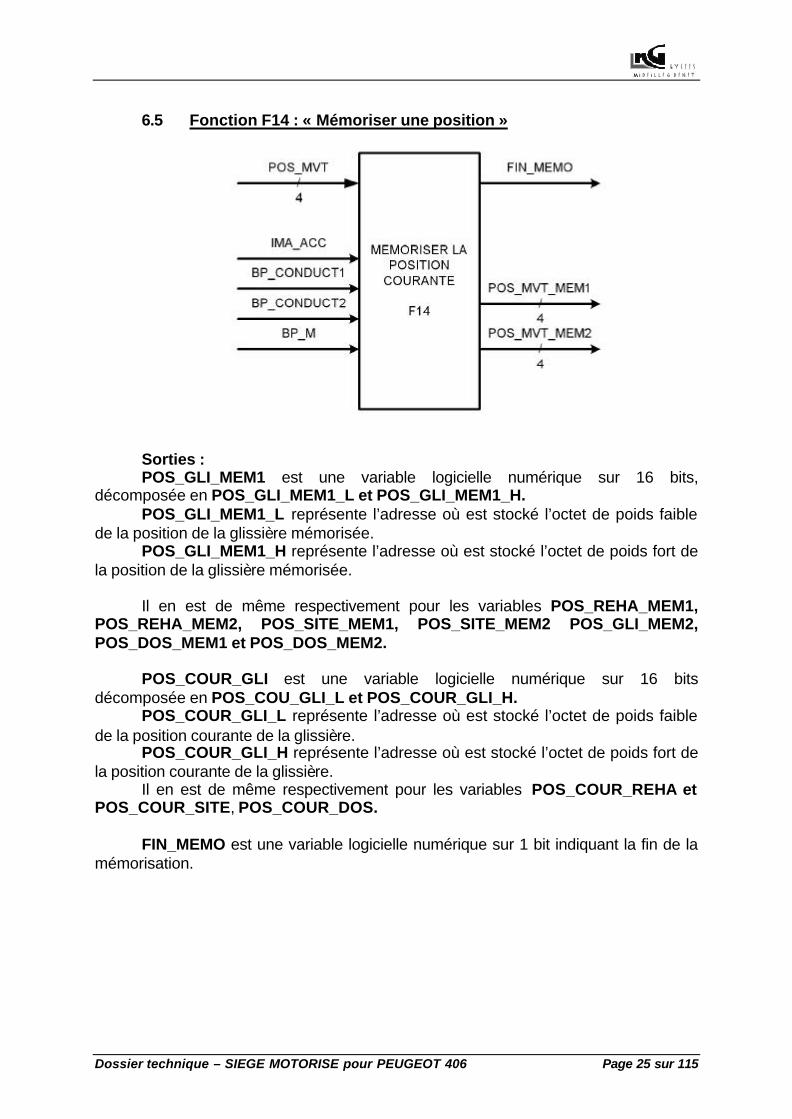
6.5 Fonction F14 : « Mémoriser une position »
Sorties : POS_GLI_MEM1 est une variable logicielle numérique sur 16 bits,
décomposée en POS_GLI_MEM1_L et POS_GLI_MEM1_H. POS_GLI_MEM1_L représente l’adresse où est stocké l’octet de poids faible
de la position de la glissière mémorisée. POS_GLI_MEM1_H représente l’adresse où est stocké l’octet de poids fort de
la position de la glissière mémorisée. Il en est de même respectivement pour les variables POS_REHA_MEM1,
POS_REHA_MEM2, POS_SITE_MEM1, POS_SITE_MEM2 POS_GLI_MEM2, POS_DOS_MEM1 et POS_DOS_MEM2.
POS_COUR_GLI est une variable logicielle numérique sur 16 bits
décomposée en POS_COU_GLI_L et POS_COUR_GLI_H. POS_COUR_GLI_L représente l’adresse où est stocké l’octet de poids faible
de la position courante de la glissière. POS_COUR_GLI_H représente l’adresse où est stocké l’octet de poids fort de
la position courante de la glissière. Il en est de même respectivement pour les variables POS_COUR_REHA et
POS_COUR_SITE, POS_COUR_DOS. FIN_MEMO est une variable logicielle numérique sur 1 bit indiquant la fin de la
mémorisation.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 26 sur 115
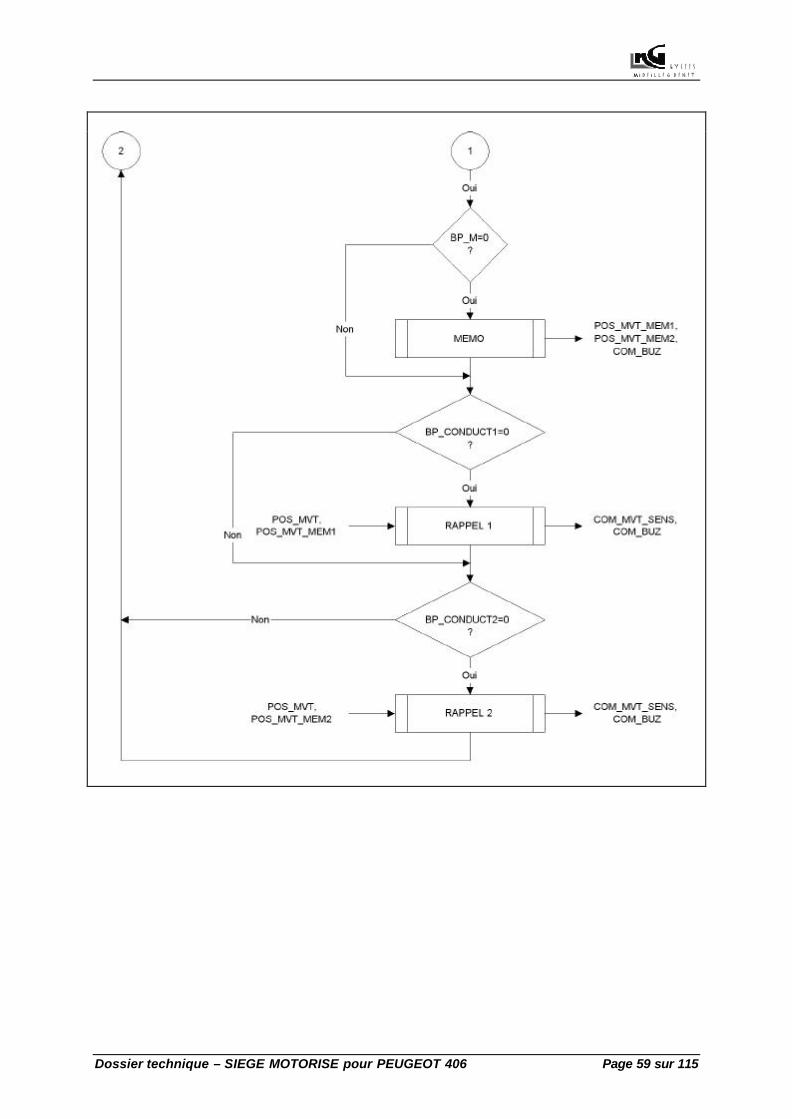
Fonctions de transfert : Lorsque BP_M est au niveau logique bas et qu’avant 4 secondes
BP_CONDUCT1 ou BP_CONDUCT2 passe au niveau logique bas, on mémorise les variables POS_MVT aux adresses POS_MVT_MEM1 ou POS_MVT_MEM2 correspondantes.
Lorsque la mémorisation est terminée la variable FIN_MEMO passe au niveau logique haut.
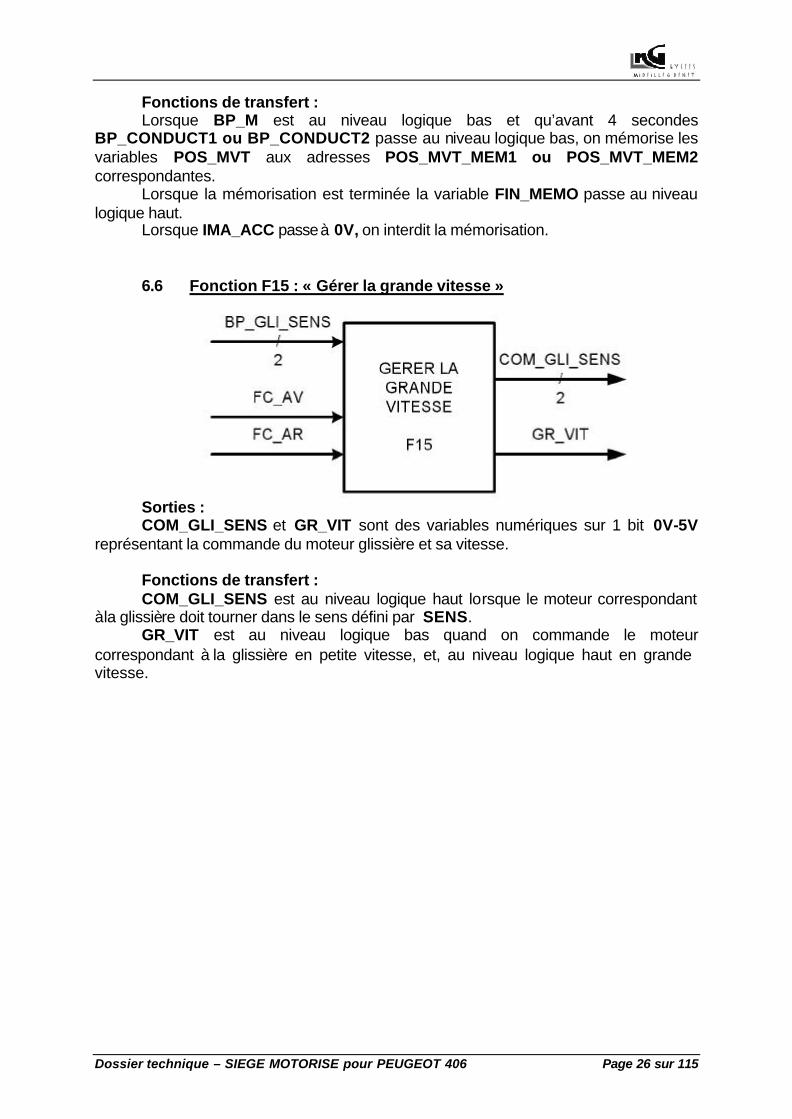
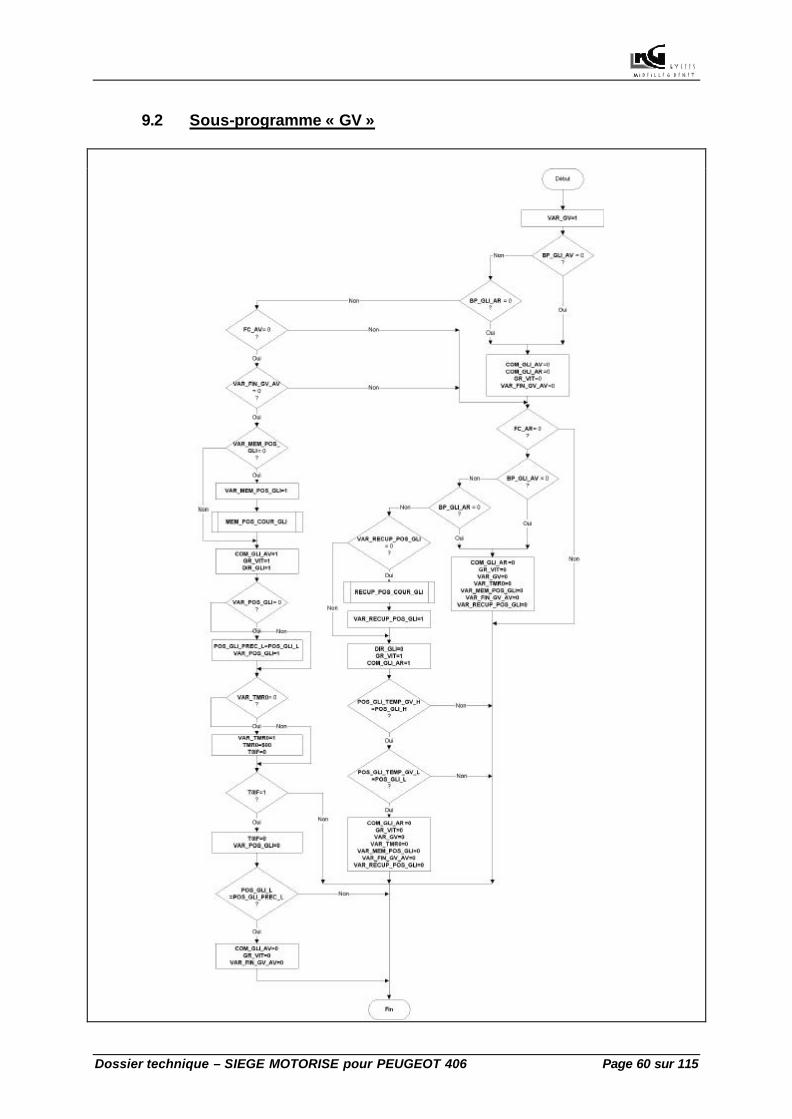
Lorsque IMA_ACC passe à 0V, on interdit la mémorisation. 6.6 Fonction F15 : « Gérer la grande vitesse »
Sorties : COM_GLI_SENS et GR_VIT sont des variables numériques sur 1 bit 0V-5V
représentant la commande du moteur glissière et sa vitesse. Fonctions de transfert : COM_GLI_SENS est au niveau logique haut lorsque le moteur correspondant
à la glissière doit tourner dans le sens défini par SENS. GR_VIT est au niveau logique bas quand on commande le moteur
correspondant à la glissière en petite vitesse, et, au niveau logique haut en grande vitesse.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 27 sur 115
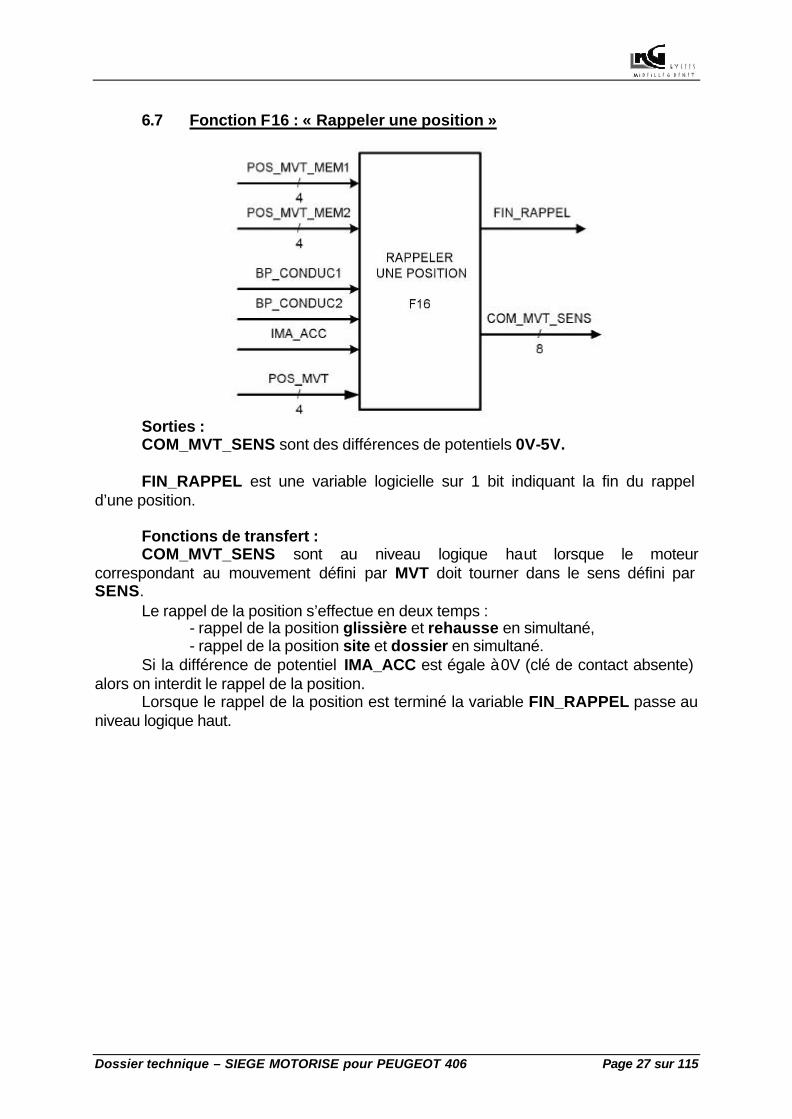
6.7 Fonction F16 : « Rappeler une position »
Sorties : COM_MVT_SENS sont des différences de potentiels 0V-5V. FIN_RAPPEL est une variable logicielle sur 1 bit indiquant la fin du rappel
d’une position. Fonctions de transfert : COM_MVT_SENS sont au niveau logique haut lorsque le moteur
correspondant au mouvement défini par MVT doit tourner dans le sens défini par SENS.
Le rappel de la position s’effectue en deux temps : - rappel de la position glissière et rehausse en simultané, - rappel de la position site et dossier en simultané. Si la différence de potentiel IMA_ACC est égale à 0V (clé de contact absente)
alors on interdit le rappel de la position. Lorsque le rappel de la position est terminé la variable FIN_RAPPEL passe au
niveau logique haut.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 28 sur 115
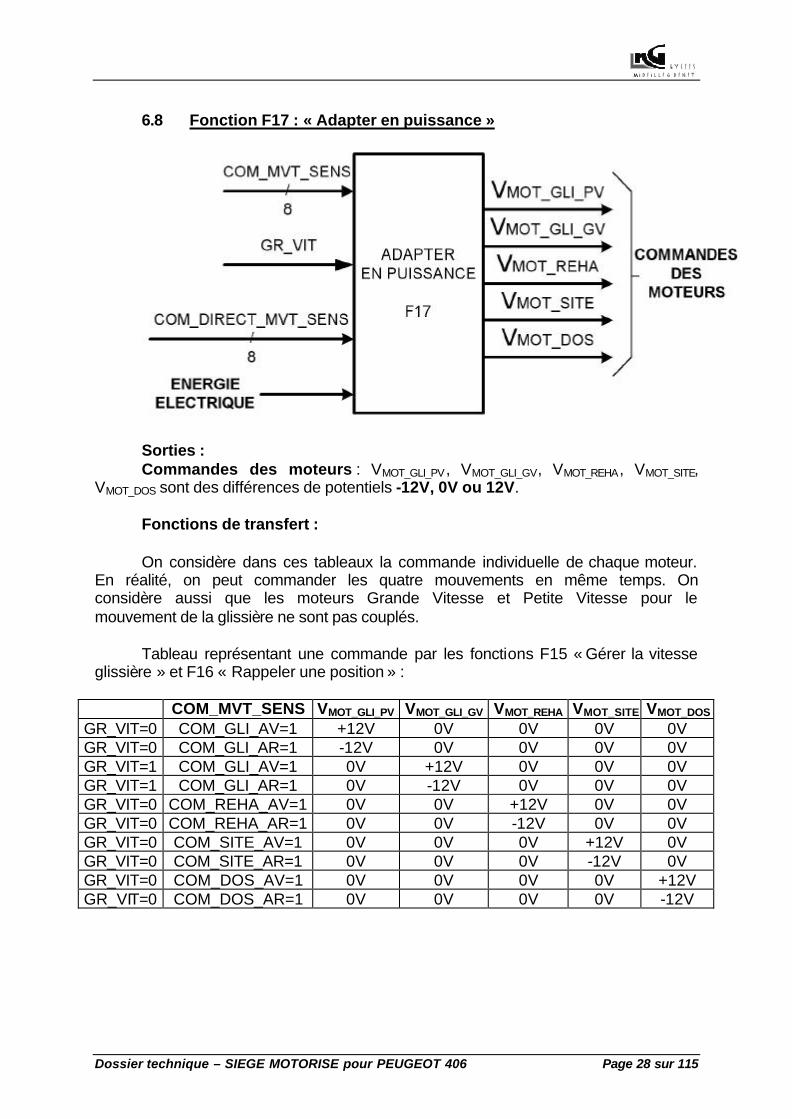
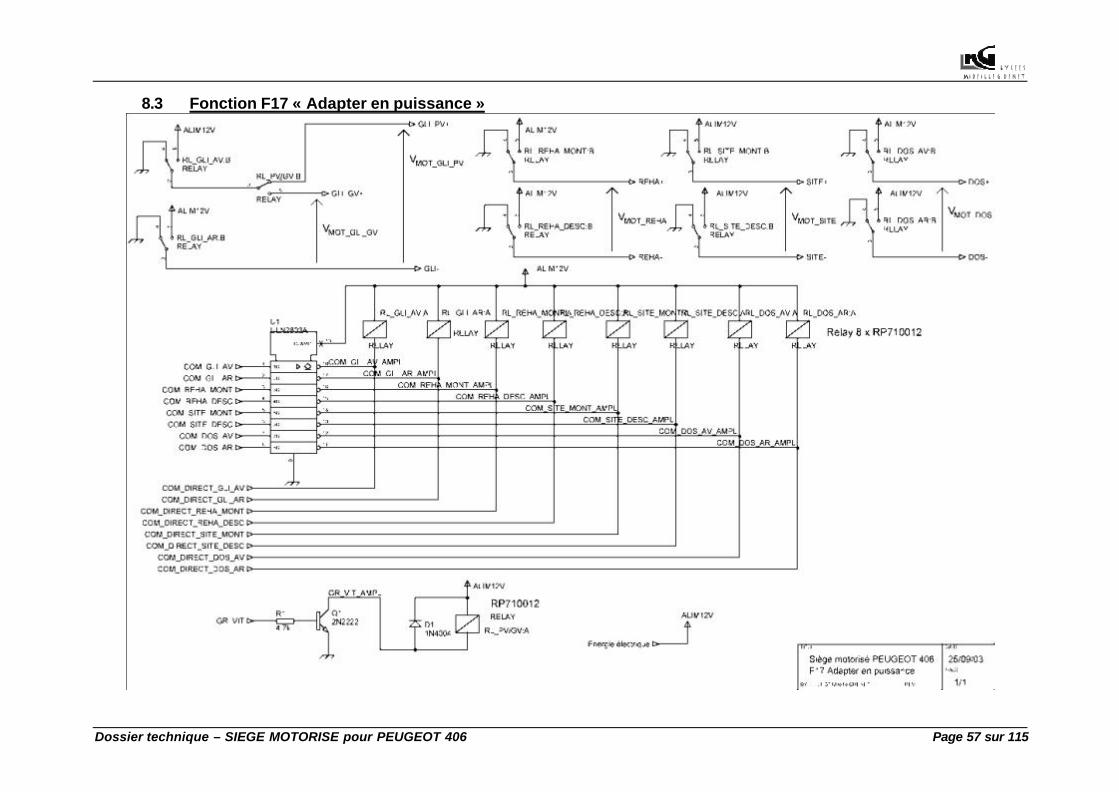
6.8 Fonction F17 : « Adapter en puissance »
Sorties : Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE,
VMOT_DOS sont des différences de potentiels -12V, 0V ou 12V. Fonctions de transfert : On considère dans ces tableaux la commande individuelle de chaque moteur.
En réalité, on peut commander les quatre mouvements en même temps. On considère aussi que les moteurs Grande Vitesse et Petite Vitesse pour le mouvement de la glissière ne sont pas couplés.
Tableau représentant une commande par les fonctions F15 « Gérer la vitesse glissière » et F16 « Rappeler une position » :
COM_MVT_SENS VMOT_GLI_PV VMOT_GLI_GV VMOT_REHA VMOT_SITE VMOT_DOS GR_VIT=0 COM_GLI_AV=1 +12V 0V 0V 0V 0V GR_VIT=0 COM_GLI_AR=1 -12V 0V 0V 0V 0V GR_VIT=1 COM_GLI_AV=1 0V +12V 0V 0V 0V GR_VIT=1 COM_GLI_AR=1 0V -12V 0V 0V 0V GR_VIT=0 COM_REHA_AV=1 0V 0V +12V 0V 0V GR_VIT=0 COM_REHA_AR=1 0V 0V -12V 0V 0V GR_VIT=0 COM_SITE_AV=1 0V 0V 0V +12V 0V GR_VIT=0 COM_SITE_AR=1 0V 0V 0V -12V 0V GR_VIT=0 COM_DOS_AV=1 0V 0V 0V 0V +12V GR_VIT=0 COM_DOS_AR=1 0V 0V 0V 0V -12V
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 29 sur 115
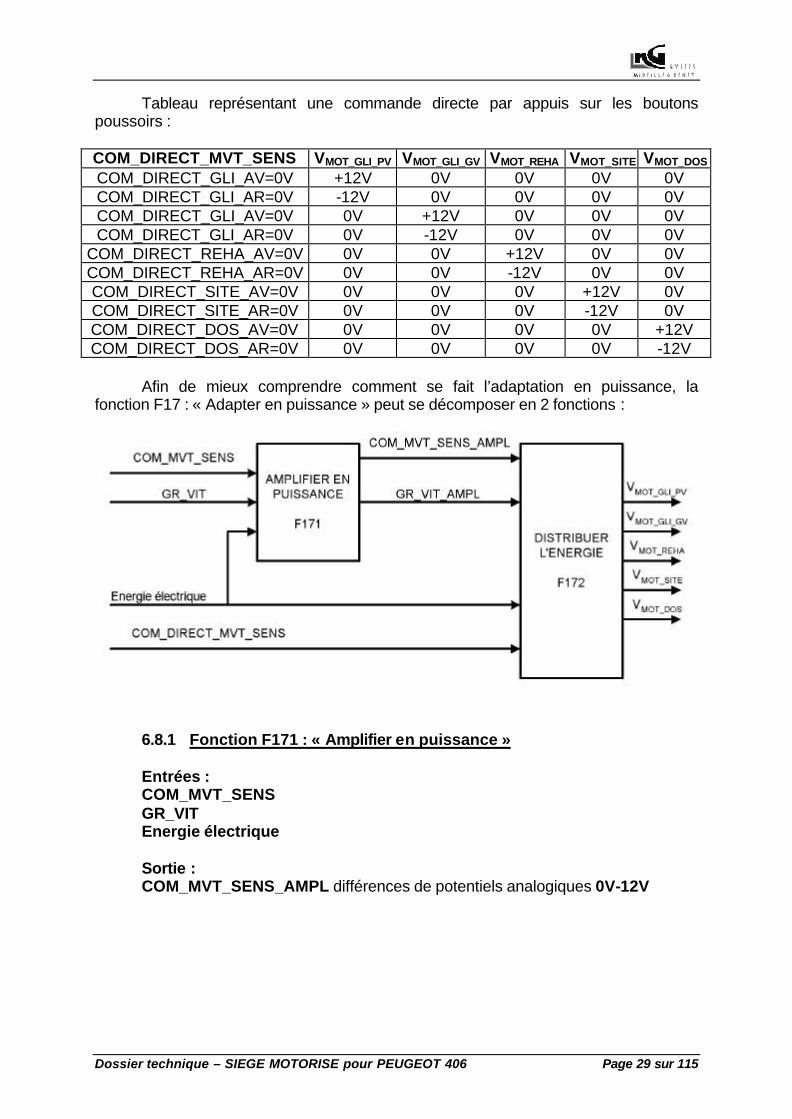
Tableau représentant une commande directe par appuis sur les boutons poussoirs :
COM_DIRECT_MVT_SENS VMOT_GLI_PV VMOT_GLI_GV VMOT_REHA VMOT_SITE VMOT_DOS COM_DIRECT_GLI_AV=0V +12V 0V 0V 0V 0V COM_DIRECT_GLI_AR=0V -12V 0V 0V 0V 0V COM_DIRECT_GLI_AV=0V 0V +12V 0V 0V 0V COM_DIRECT_GLI_AR=0V 0V -12V 0V 0V 0V
COM_DIRECT_REHA_AV=0V 0V 0V +12V 0V 0V COM_DIRECT_REHA_AR=0V 0V 0V -12V 0V 0V COM_DIRECT_SITE_AV=0V 0V 0V 0V +12V 0V COM_DIRECT_SITE_AR=0V 0V 0V 0V -12V 0V COM_DIRECT_DOS_AV=0V 0V 0V 0V 0V +12V COM_DIRECT_DOS_AR=0V 0V 0V 0V 0V -12V
Afin de mieux comprendre comment se fait l’adaptation en puissance, la
fonction F17 : « Adapter en puissance » peut se décomposer en 2 fonctions :
6.8.1 Fonction F171 : « Amplifier en puissance » Entrées : COM_MVT_SENS GR_VIT Energie électrique Sortie : COM_MVT_SENS_AMPL différences de potentiels analogiques 0V-12V
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 30 sur 115
Fonction de transfert : Lorsque les différences de potentiels COM_MVT_SENS sont égales à 0V
alors les différences de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 12V.
Lorsque les différences de potentiels COM_MVT_SENS sont égales à 5V alors les différences de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 0V.
Le fonctionnement est identique avec les signaux GR_VIT et GR_VIT_AMPL. 6.8.2 Fonction F172 : « Distribuer l’énergie » Entrées : COM_MVT_SENS_AMPL COM_DIRECT_MVT_SENS Energie électrique
Sortie : Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE,
VMOT_DOS sont des différences de potentiels –12V, 0V et 12V.
Fonction de transfert : Lorsqu’ aucune commande n’est active, alors les signaux de commande des moteurs sont à 0V. Lorsque les commandes COM_MVT_AV (ou MONT) ou COM_DIRECT_MVT_AV (ou MONT) sont égales à 0V, les différences de potentiels de commande des moteurs correspondantes sont égales à +12V. Lorsque les commandes COM_MVT_AR (ou DESC) ou COM_DIRECT_MVT_AR (ou DESC) sont égales à 0V, les différences de potentiels de commande des moteurs correspondantes sont égales à -12V.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 31 sur 115
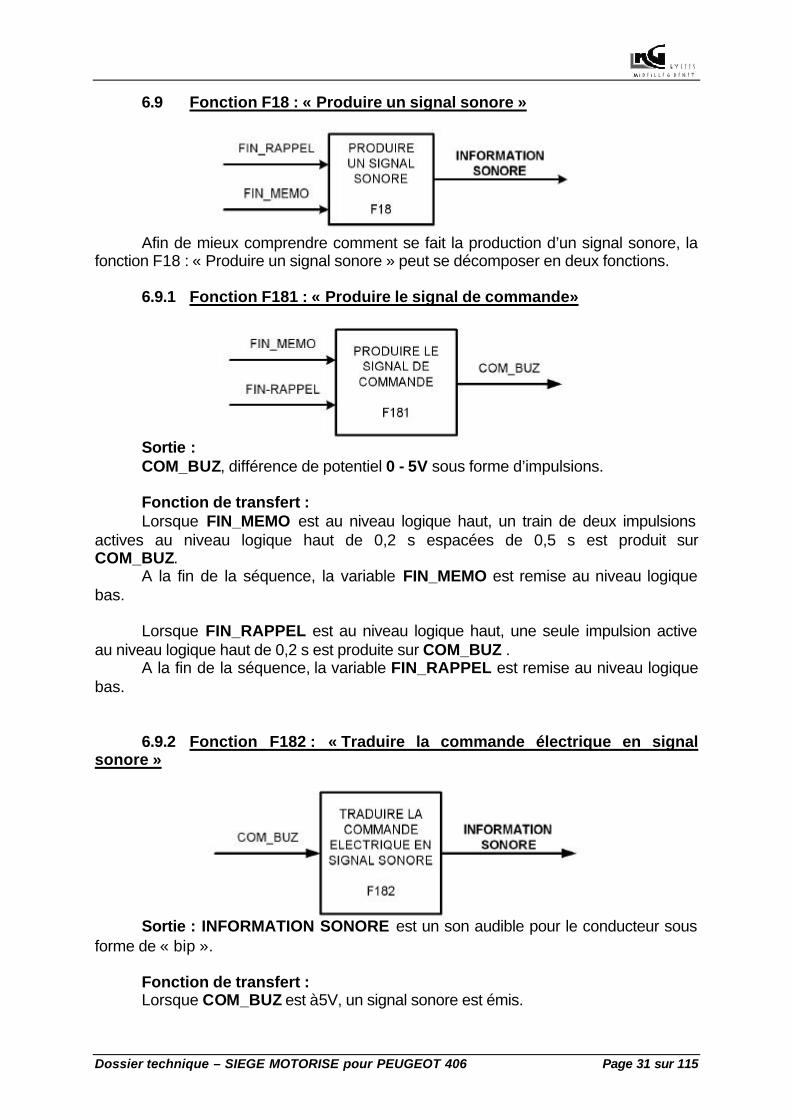
6.9 Fonction F18 : « Produire un signal sonore »
Afin de mieux comprendre comment se fait la production d’un signal sonore, la
fonction F18 : « Produire un signal sonore » peut se décomposer en deux fonctions. 6.9.1 Fonction F181 : « Produire le signal de commande»
Sortie : COM_BUZ, différence de potentiel 0 - 5V sous forme d’impulsions. Fonction de transfert : Lorsque FIN_MEMO est au niveau logique haut, un train de deux impulsions
actives au niveau logique haut de 0,2 s espacées de 0,5 s est produit sur COM_BUZ.
A la fin de la séquence, la variable FIN_MEMO est remise au niveau logique bas.
Lorsque FIN_RAPPEL est au niveau logique haut, une seule impulsion active
au niveau logique haut de 0,2 s est produite sur COM_BUZ . A la fin de la séquence, la variable FIN_RAPPEL est remise au niveau logique
bas. 6.9.2 Fonction F182 : « Traduire la commande électrique en signal
sonore »
Sortie : INFORMATION SONORE est un son audible pour le conducteur sous
forme de « bip ». Fonction de transfert : Lorsque COM_BUZ est à 5V, un signal sonore est émis.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 32 sur 115
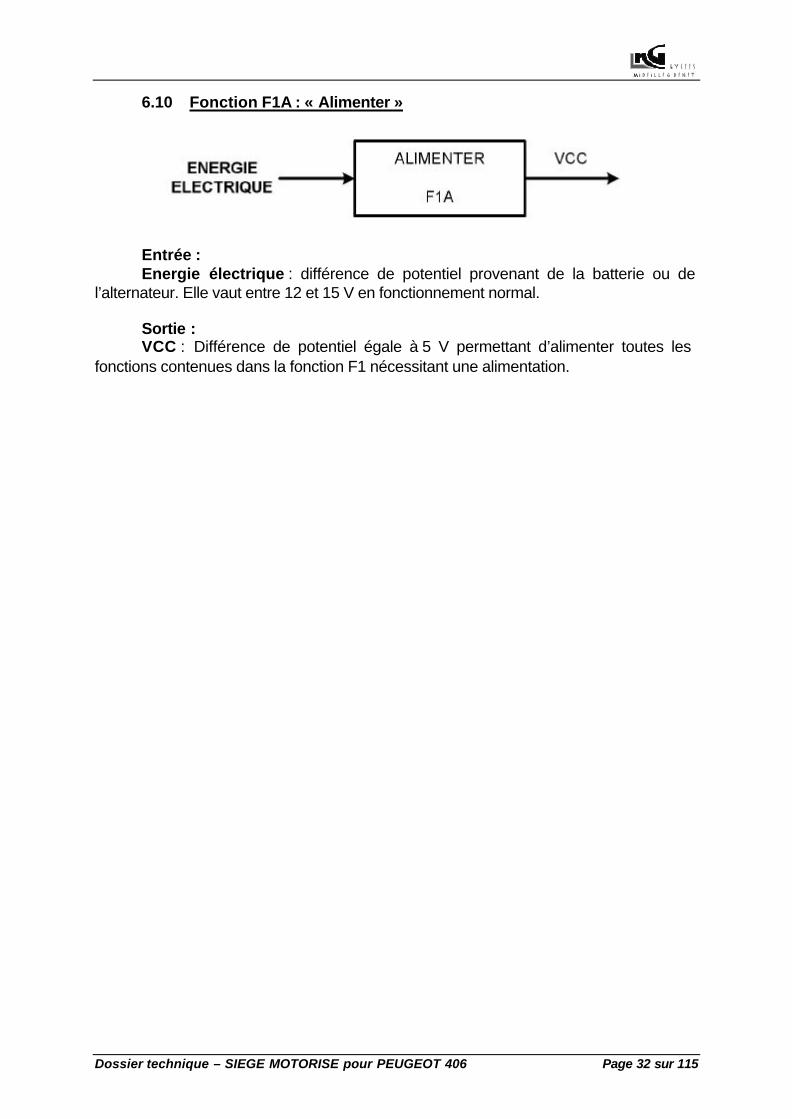
6.10 Fonction F1A : « Alimenter »
Entrée : Energie électrique : différence de potentiel provenant de la batterie ou de
l’alternateur. Elle vaut entre 12 et 15 V en fonctionnement normal. Sortie : VCC : Différence de potentiel égale à 5 V permettant d’alimenter toutes les
fonctions contenues dans la fonction F1 nécessitant une alimentation.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 33 sur 115
7. DESCRIPTION DES SOUS-FONCTIONS DE F2 « ASSURER LE MOUVEMENT » :
RAPPEL : Notation pour le tout le dossier : L’indication MVT renvoie d’une manière générale aux 4
déplacements du siège à savoir GLI, REHA, SITE et DOS. - On parlera de MVT pour parler d’un des signaux des quatre mouvements que sont GLI pour glissière, REHA pour rehausse, SITE pour site et DOS pour dossier.
Ex : POS_MVT désigne les 4 signaux POS_GLI, POS_DOS, … - On utilisera SENS pour citer un des deux sens de chaque
mouvement, à savoir AV pour avant ou AR pour arrière et MONT pour montée ou DESC pour descente.
Exemple : les signaux POS_GLI_SENS sont les signaux
POS_GLI_AV et POS_GLI_AR.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 34 sur 115
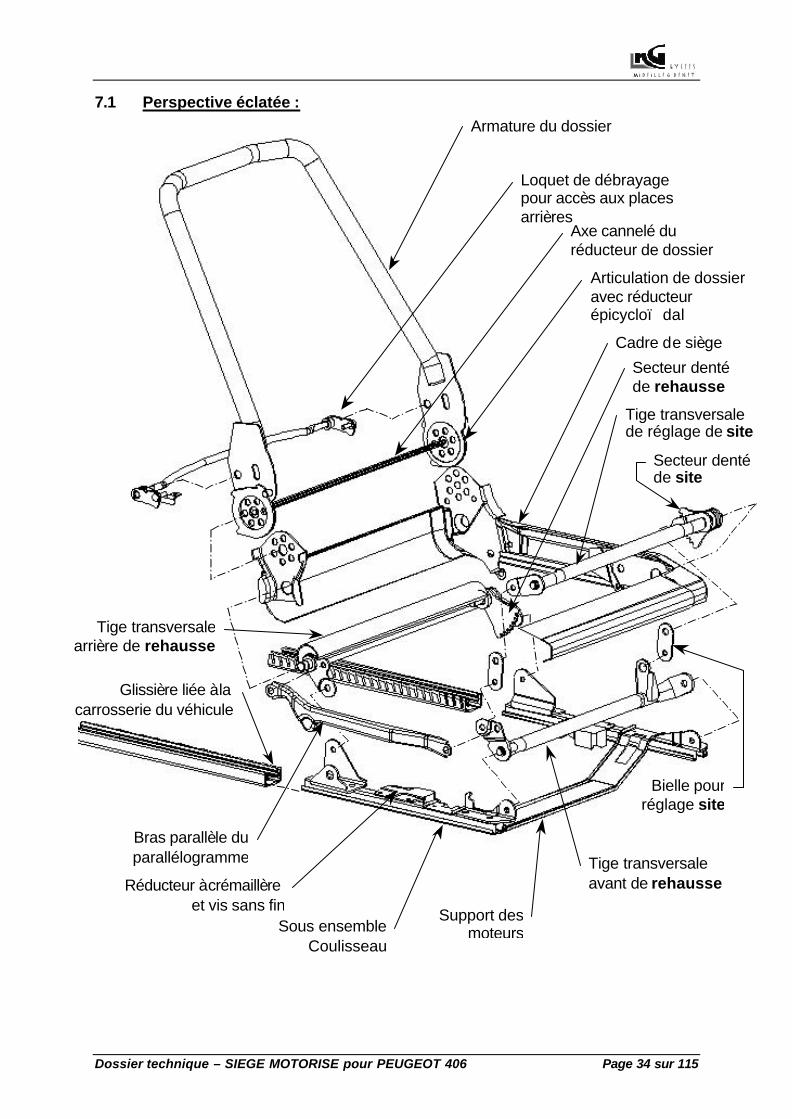
7.1 Perspective éclatée :
Glissière liée à la carrosserie du véhicule
Sous ensemble Coulisseau
Réducteur à crémaillère et vis sans fin
Support des moteurs
Bras parallèle du parallélogramme Tige transversale
avant de rehausse
Tige transversale arrière de rehausse
Tige transversale de réglage de site
Secteur denté de rehausse
Secteur denté de site
Bielle pour réglage site
Cadre de siège
Articulation de dossier avec réducteur épicycloï dal
Axe cannelé du réducteur de dossier
Armature du dossier
Loquet de débrayage pour accès aux places arrières
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 35 sur 115
7.2 Schéma cinématique :
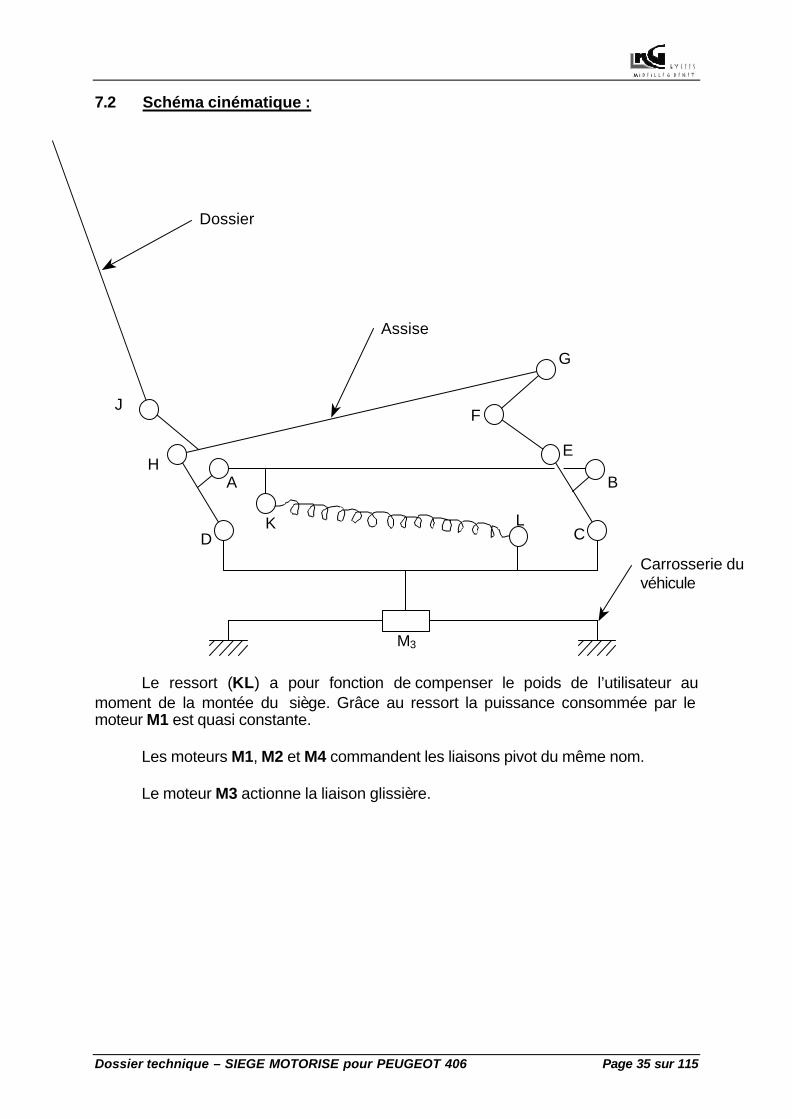
Le ressort (KL) a pour fonction de compenser le poids de l’utilisateur au
moment de la montée du siège. Grâce au ressort la puissance consommée par le moteur M1 est quasi constante.
Les moteurs M1, M2 et M4 commandent les liaisons pivot du même nom. Le moteur M3 actionne la liaison glissière.
Carrosserie du véhicule
A B
C D
F
E
G
H
M3
J
Dossier
Assise
K L
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 36 sur 115
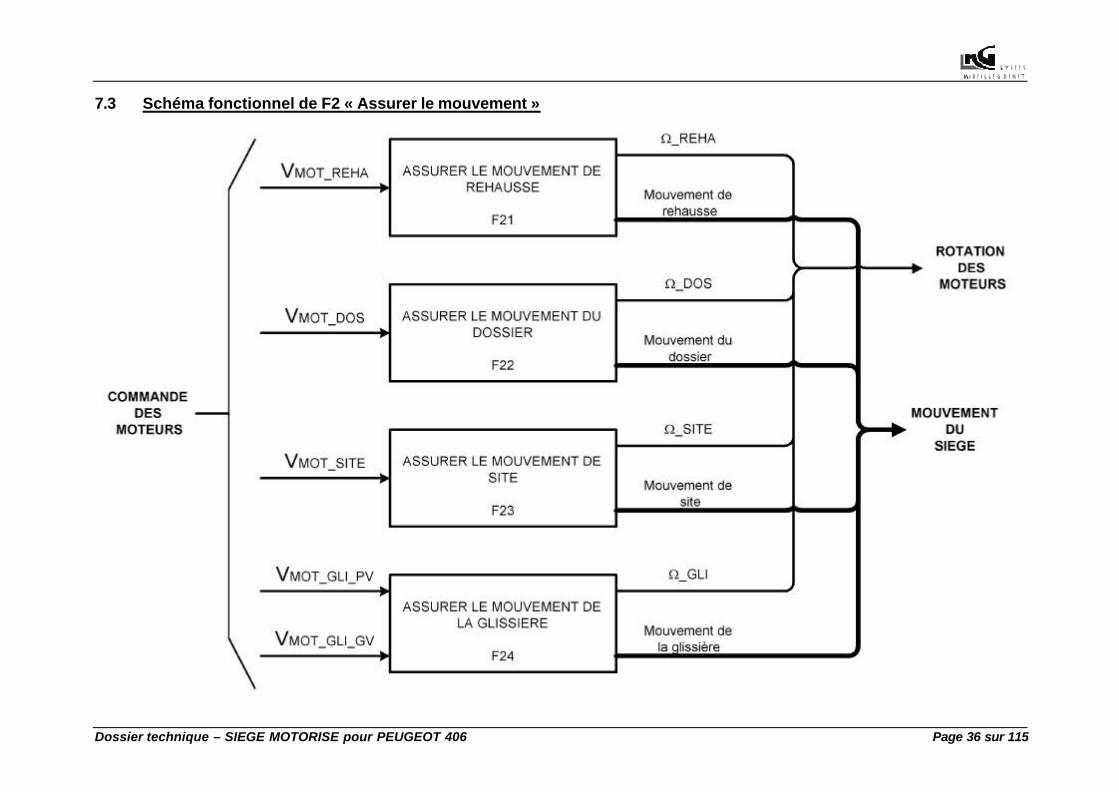
7.3 Schéma fonctionnel de F2 « Assurer le mouvement »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 37 sur 115
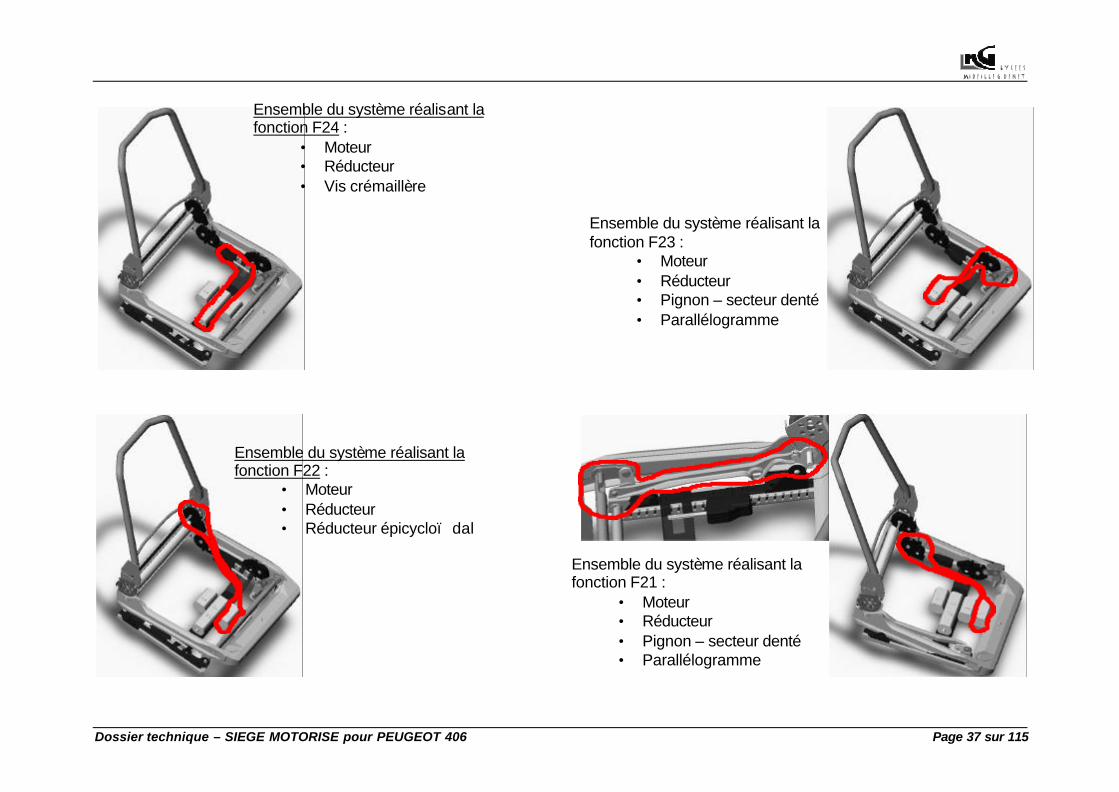
Ensemble du système réalisant la fonction F24 :
• Moteur • Réducteur • Vis crémaillère
Ensemble du système réalisant la fonction F23 :
• Moteur • Réducteur • Pignon – secteur denté • Parallélogramme
Ensemble du système réalisant la fonction F21 :
• Moteur • Réducteur • Pignon – secteur denté • Parallélogramme
Ensemble du système réalisant la fonction F22 :
• Moteur • Réducteur • Réducteur épicycloï dal
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 38 sur 115
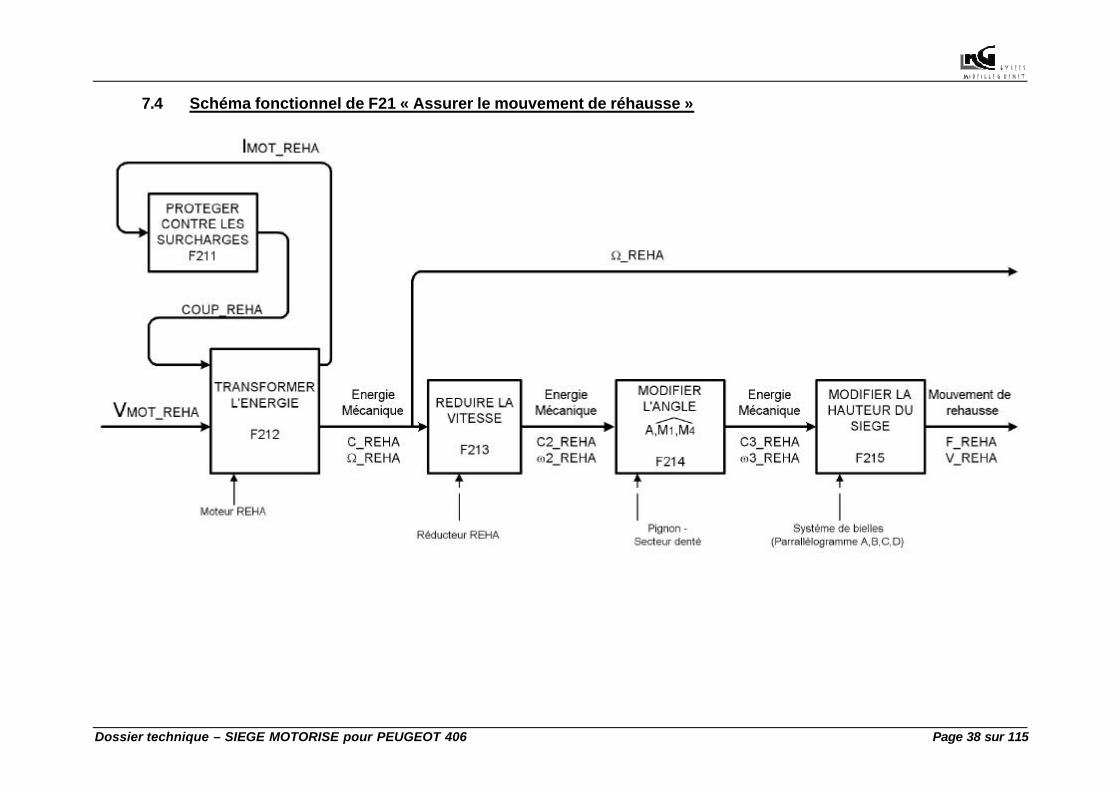
7.4 Schéma fonctionnel de F21 « Assurer le mouvement de réhausse »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 39 sur 115
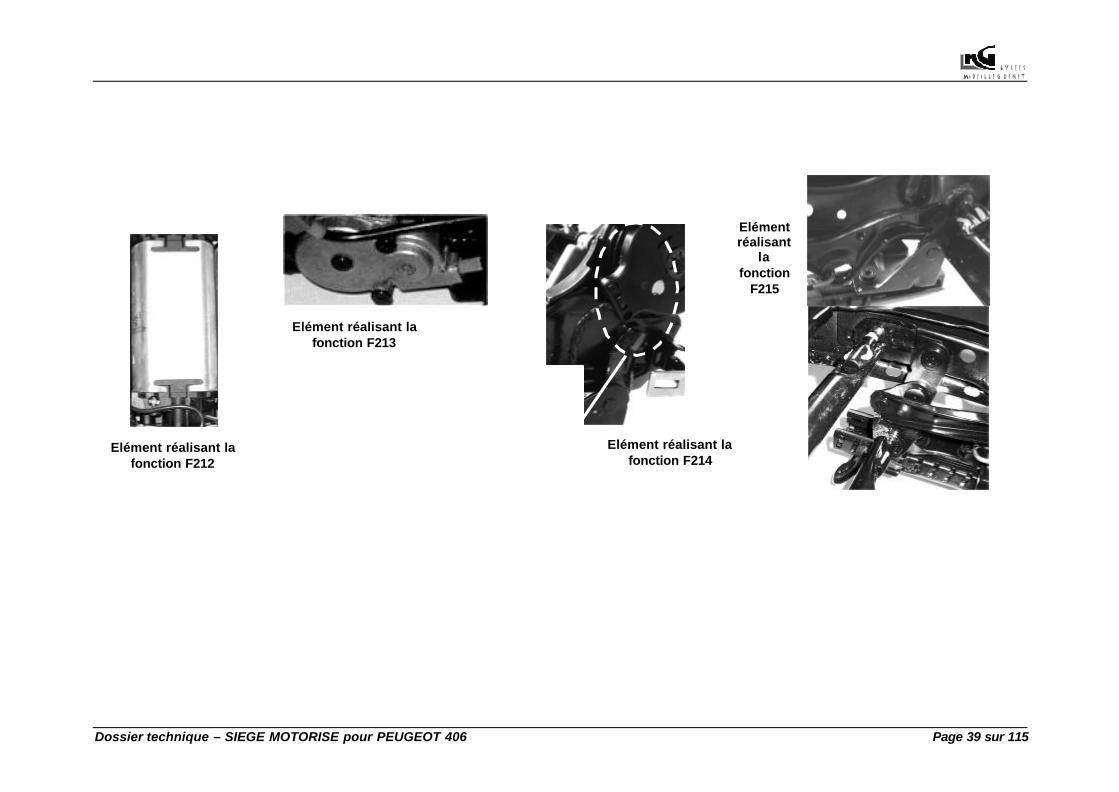
Elément réalisant la fonction F212
Elément réalisant la fonction F213
Elément réalisant la fonction F214
Elément réalisant
la fonction
F215
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 40 sur 115
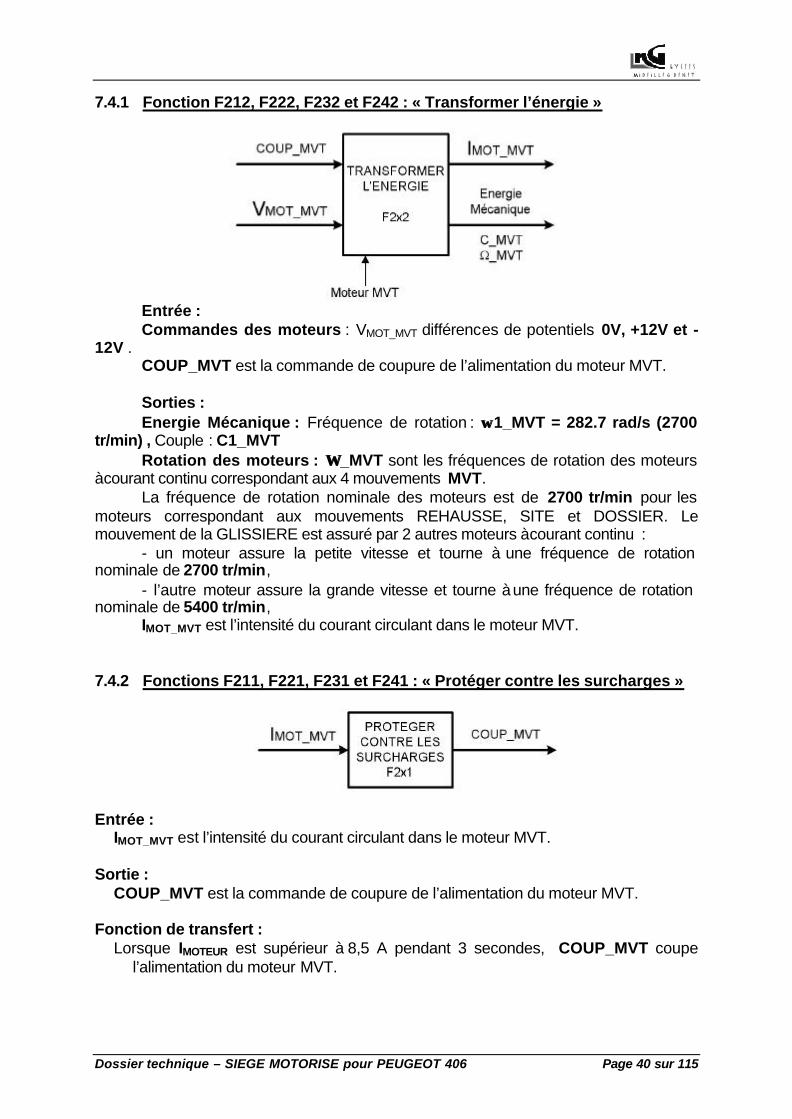
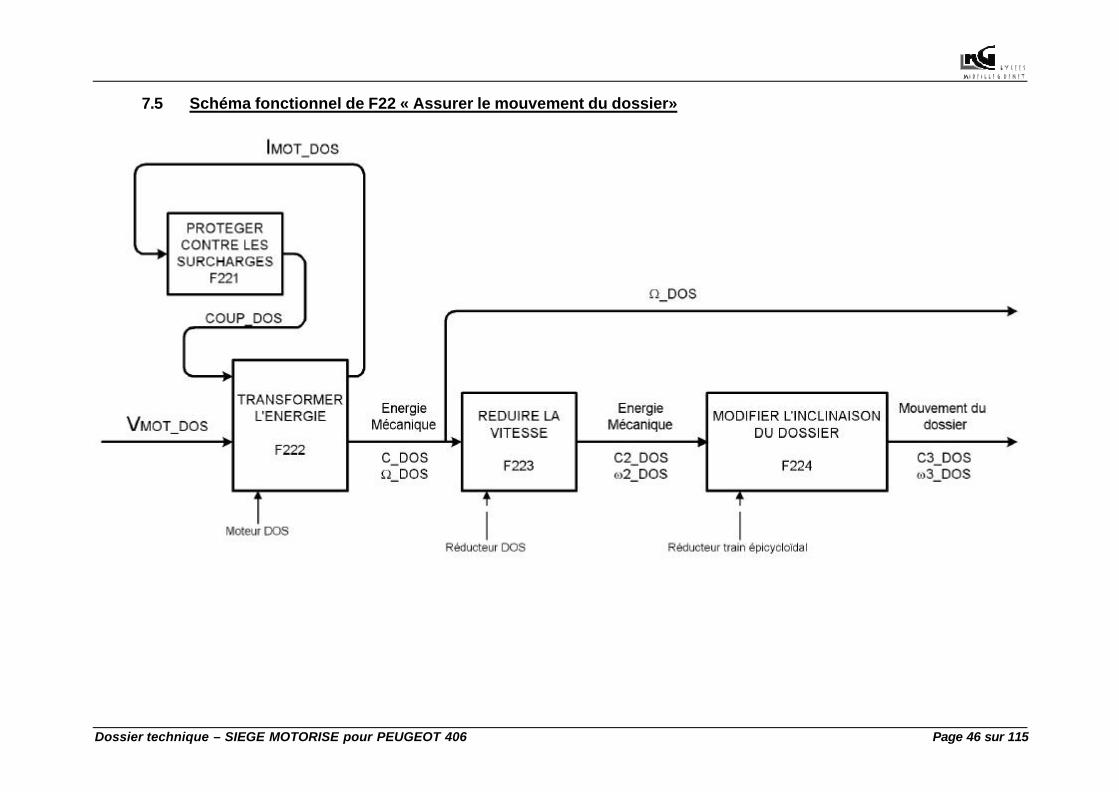
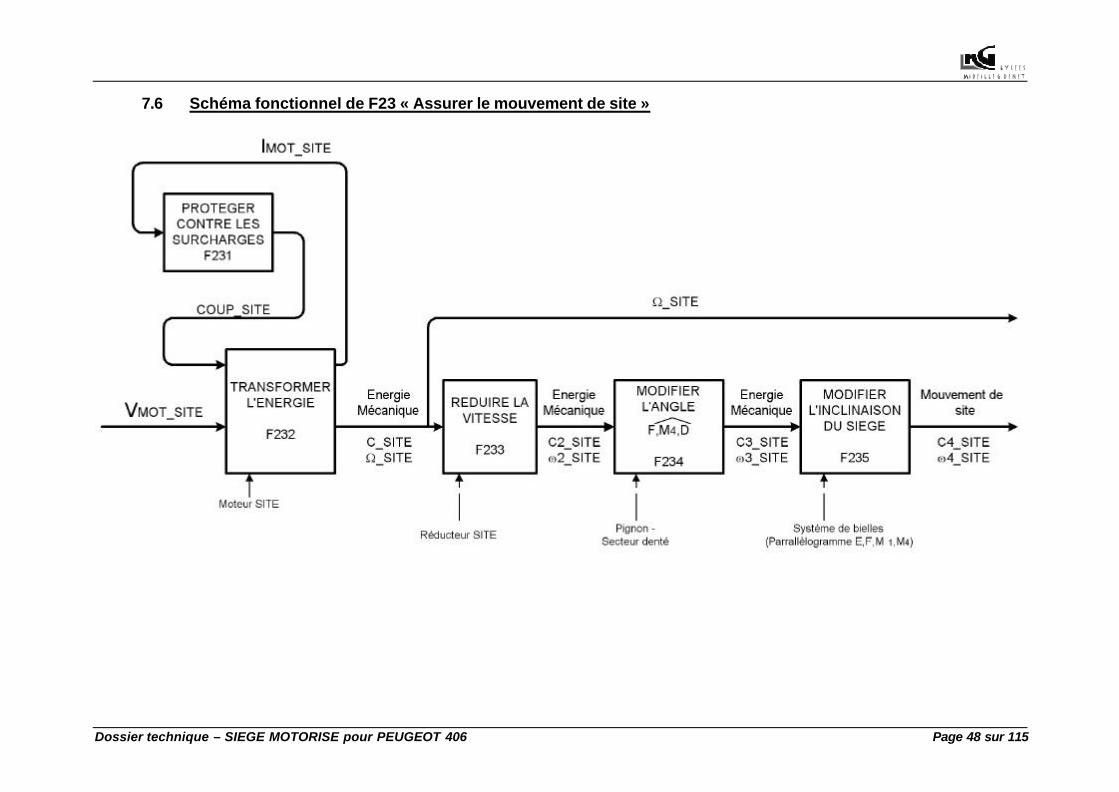
7.4.1 Fonction F212, F222, F232 et F242 : « Transformer l’énergie »
Entrée : Commandes des moteurs : VMOT_MVT différences de potentiels 0V, +12V et -
12V . COUP_MVT est la commande de coupure de l’alimentation du moteur MVT. Sorties : Energie Mécanique : Fréquence de rotation : ωω1_MVT = 282.7 rad/s (2700
tr/min) , Couple : C1_MVT Rotation des moteurs : ΩΩ _MVT sont les fréquences de rotation des moteurs
à courant continu correspondant aux 4 mouvements MVT. La fréquence de rotation nominale des moteurs est de 2700 tr/min pour les
moteurs correspondant aux mouvements REHAUSSE, SITE et DOSSIER. Le mouvement de la GLISSIERE est assuré par 2 autres moteurs à courant continu :
- un moteur assure la petite vitesse et tourne à une fréquence de rotation nominale de 2700 tr/min,
- l’autre moteur assure la grande vitesse et tourne à une fréquence de rotation nominale de 5400 tr/min,
IMOT_MVT est l’intensité du courant circulant dans le moteur MVT.
7.4.2 Fonctions F211, F221, F231 et F241 : « Protéger contre les surcharges »
Entrée : IMOT_MVT est l’intensité du courant circulant dans le moteur MVT.
Sortie :
COUP_MVT est la commande de coupure de l’alimentation du moteur MVT. Fonction de transfert :
Lorsque IMOTEUR est supérieur à 8,5 A pendant 3 secondes, COUP_MVT coupe l’alimentation du moteur MVT.
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 41 sur 115
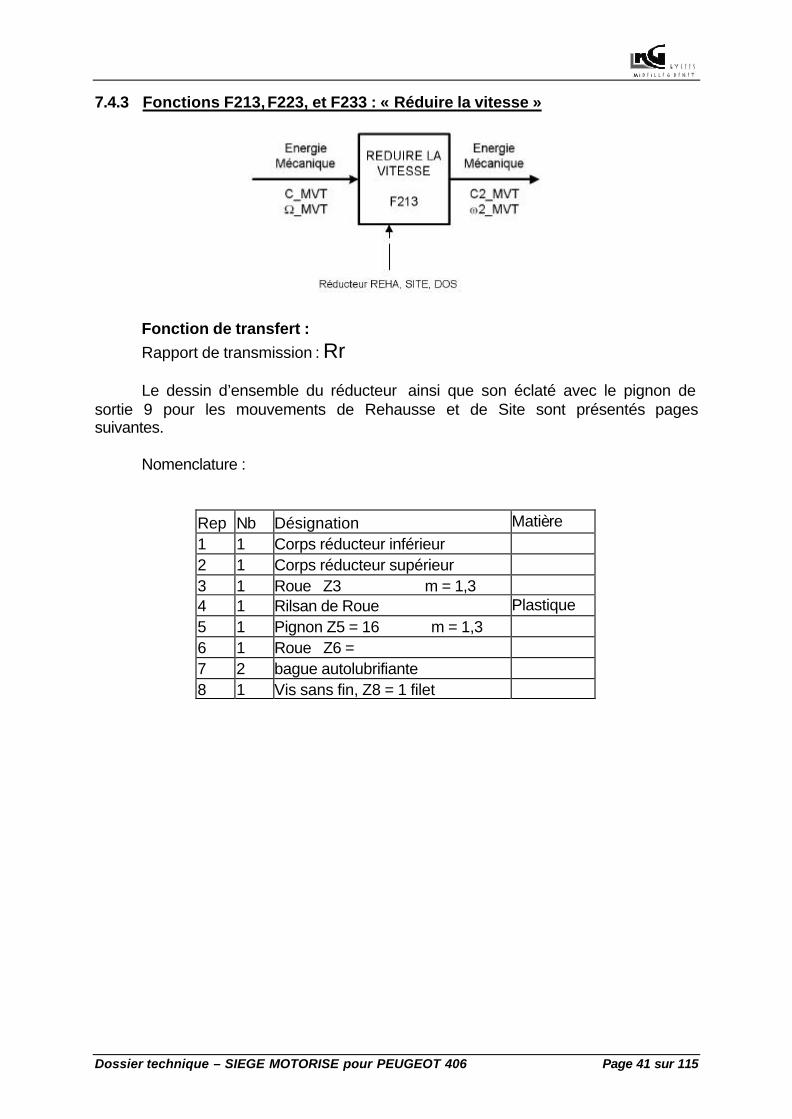
7.4.3 Fonctions F213, F223, et F233 : « Réduire la vitesse »
Fonction de transfert :
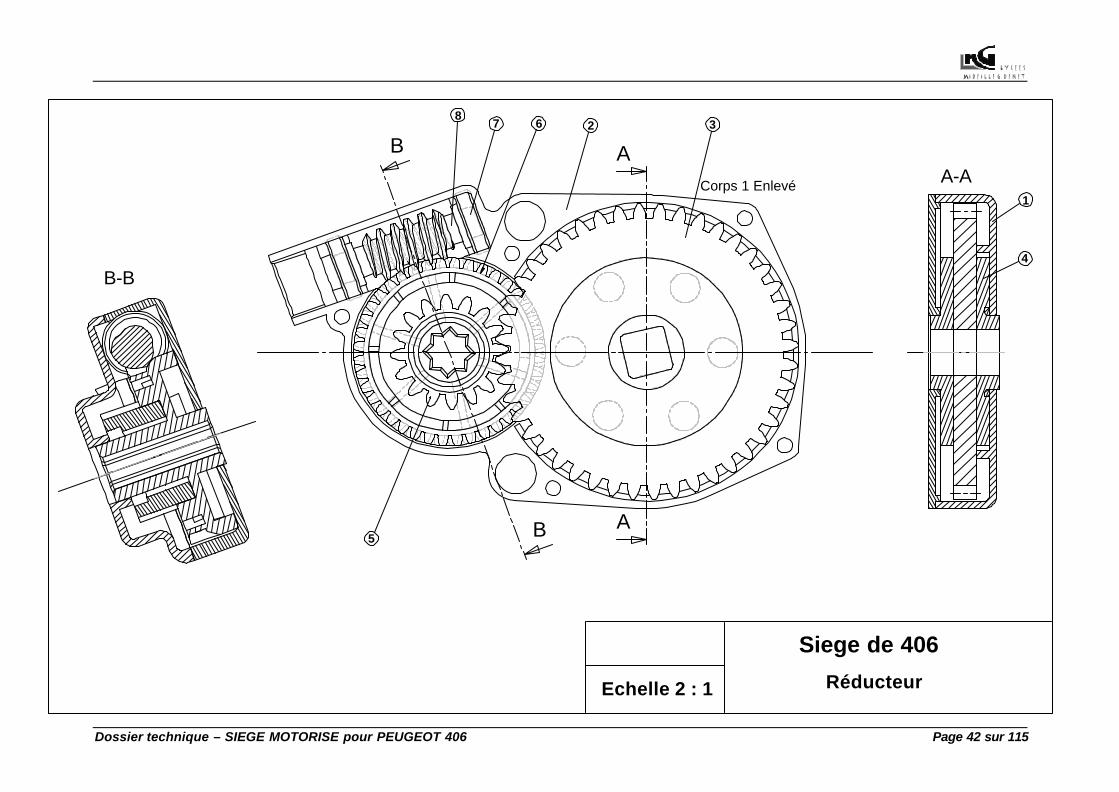
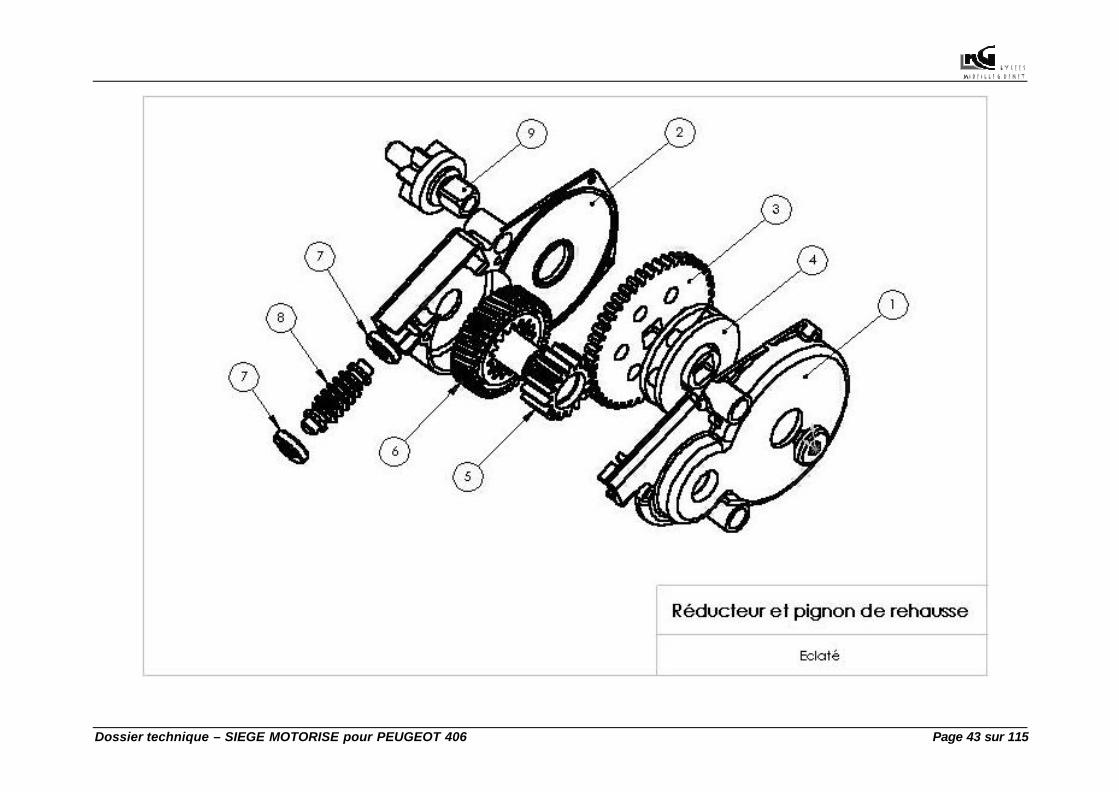
Rapport de transmission : Rr Le dessin d’ensemble du réducteur ainsi que son éclaté avec le pignon de
sortie 9 pour les mouvements de Rehausse et de Site sont présentés pages suivantes.
Nomenclature :
Rep Nb Désignation Matière
1 1 Corps réducteur inférieur 2 1 Corps réducteur supérieur 3 1 Roue Z3 m = 1,3 4 1 Rilsan de Roue Plastique 5 1 Pignon Z5 = 16 m = 1,3 6 1 Roue Z6 = 7 2 bague autolubrifiante 8 1 Vis sans fin, Z8 = 1 filet
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 42 sur 115
Corps 1 Enlevé A-A
4
1
B-B
A
A
B
B
2 38
5
67
Siege de 406
RéducteurEchelle 2 : 1
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 43 sur 115
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 44 sur 115
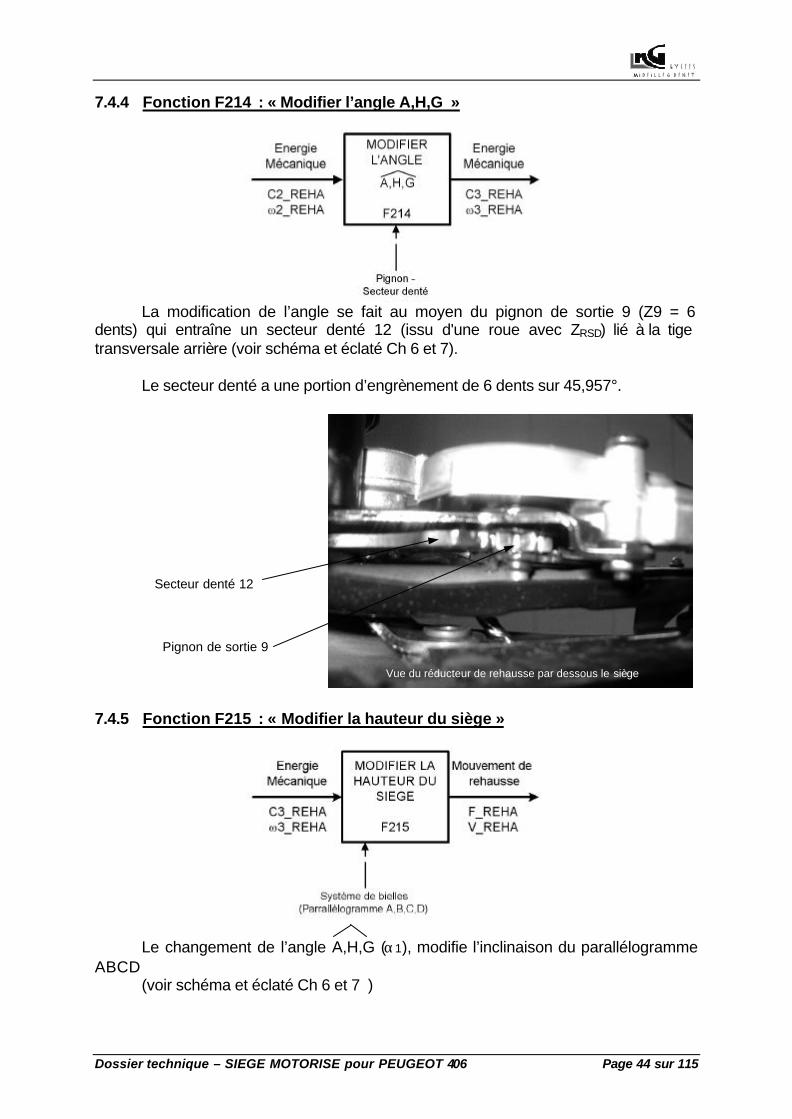
7.4.4 Fonction F214 : « Modifier l’angle A,H,G »
La modification de l’angle se fait au moyen du pignon de sortie 9 (Z9 = 6
dents) qui entraîne un secteur denté 12 (issu d'une roue avec ZRSD) lié à la tige transversale arrière (voir schéma et éclaté Ch 6 et 7).
Le secteur denté a une portion d’engrènement de 6 dents sur 45,957°.
7.4.5 Fonction F215 : « Modifier la hauteur du siège »
Le changement de l’angle A,H,G (α1), modifie l’inclinaison du parallélogramme
ABCD (voir schéma et éclaté Ch 6 et 7 )
Vue du réducteur de rehausse par dessous le siège
Secteur denté 12
Pignon de sortie 9
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 45 sur 115
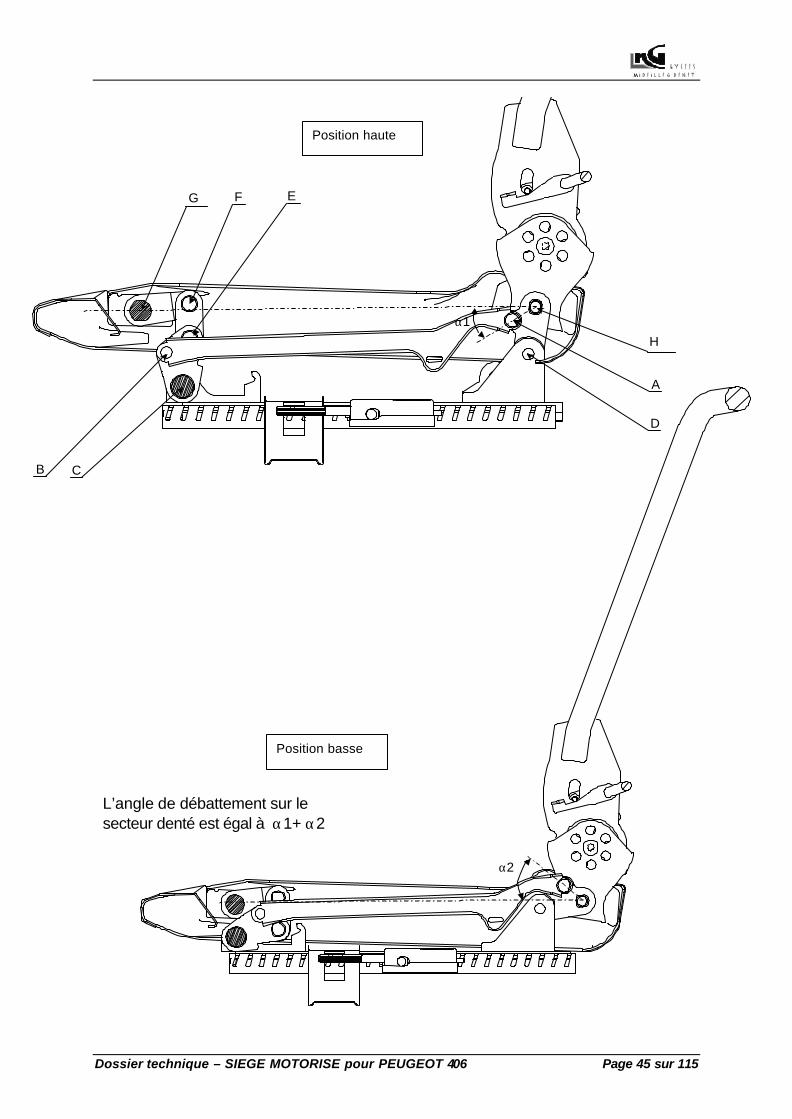
E F G
C B
Position haute
A
D
H
α1
Position basse
α2
L’angle de débattement sur le secteur denté est égal à α1+ α2
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 46 sur 115
7.5 Schéma fonctionnel de F22 « Assurer le mouvement du dossier»
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 47 sur 115
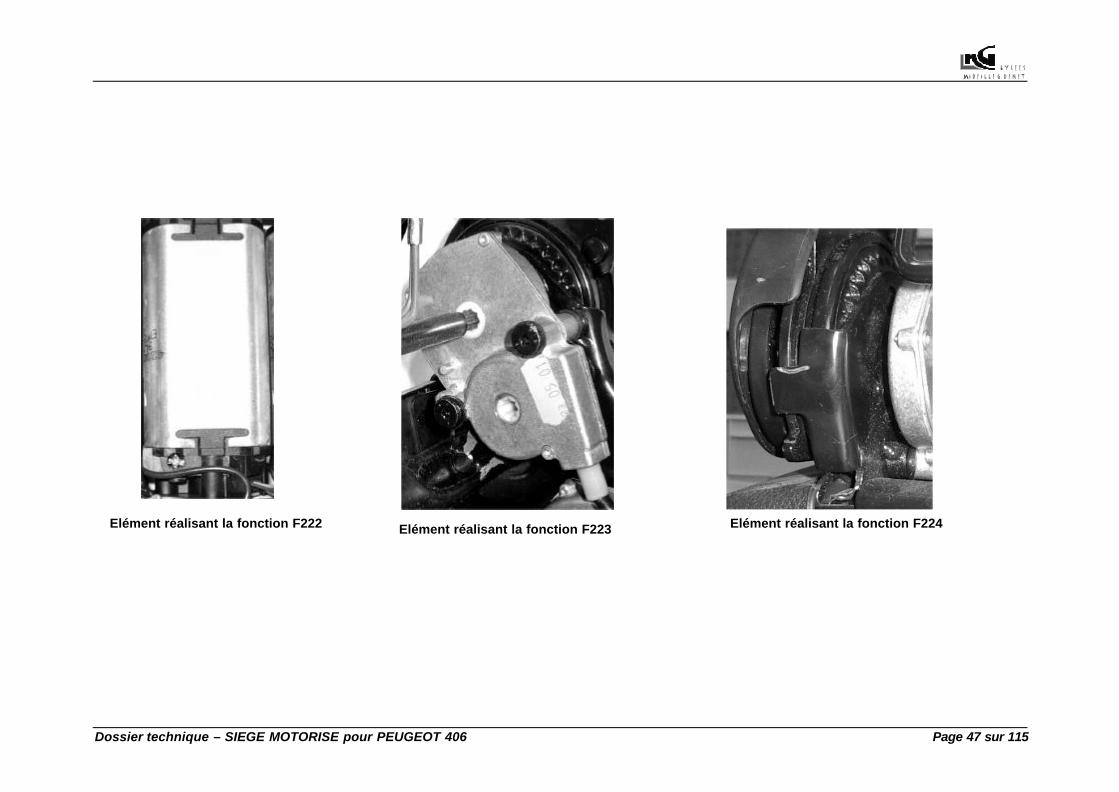
Elément réalisant la fonction F223 Elément réalisant la fonction F224 Elément réalisant la fonction F222
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 48 sur 115
7.6 Schéma fonctionnel de F23 « Assurer le mouvement de site »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 49 sur 115
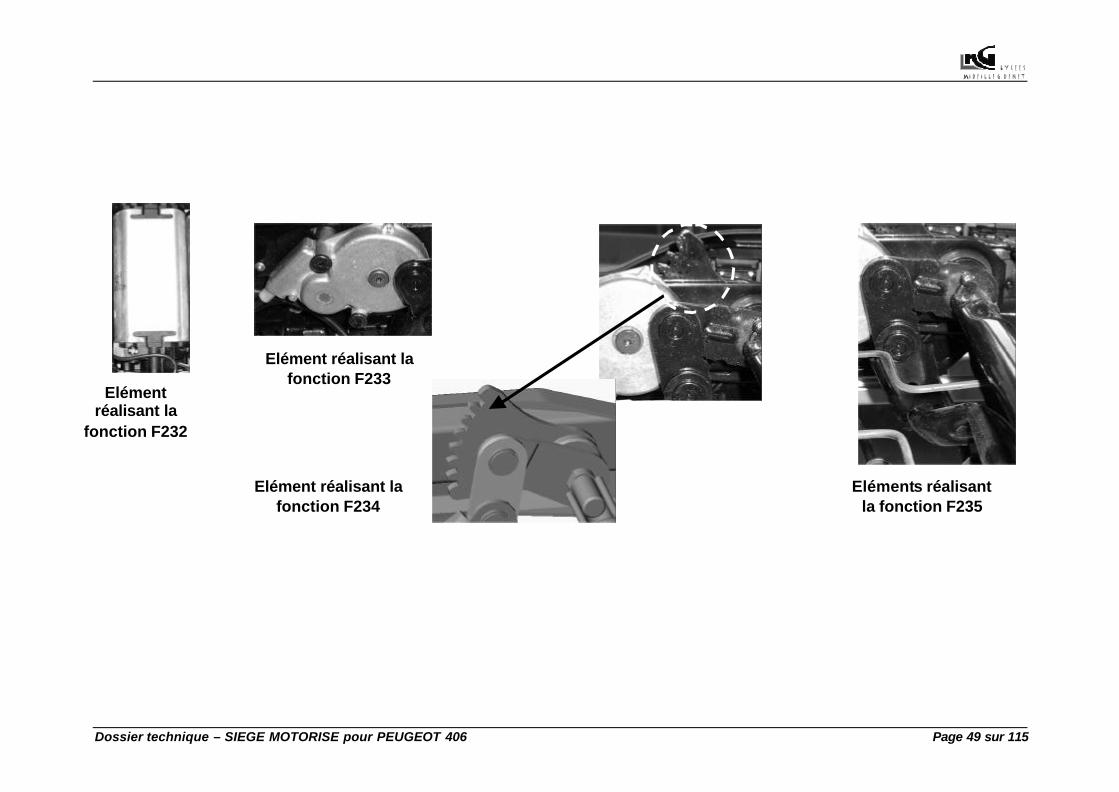
Elément réalisant la
fonction F232
Elément réalisant la fonction F233
Elément réalisant la fonction F234
Eléments réalisant la fonction F235
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 50 sur 115
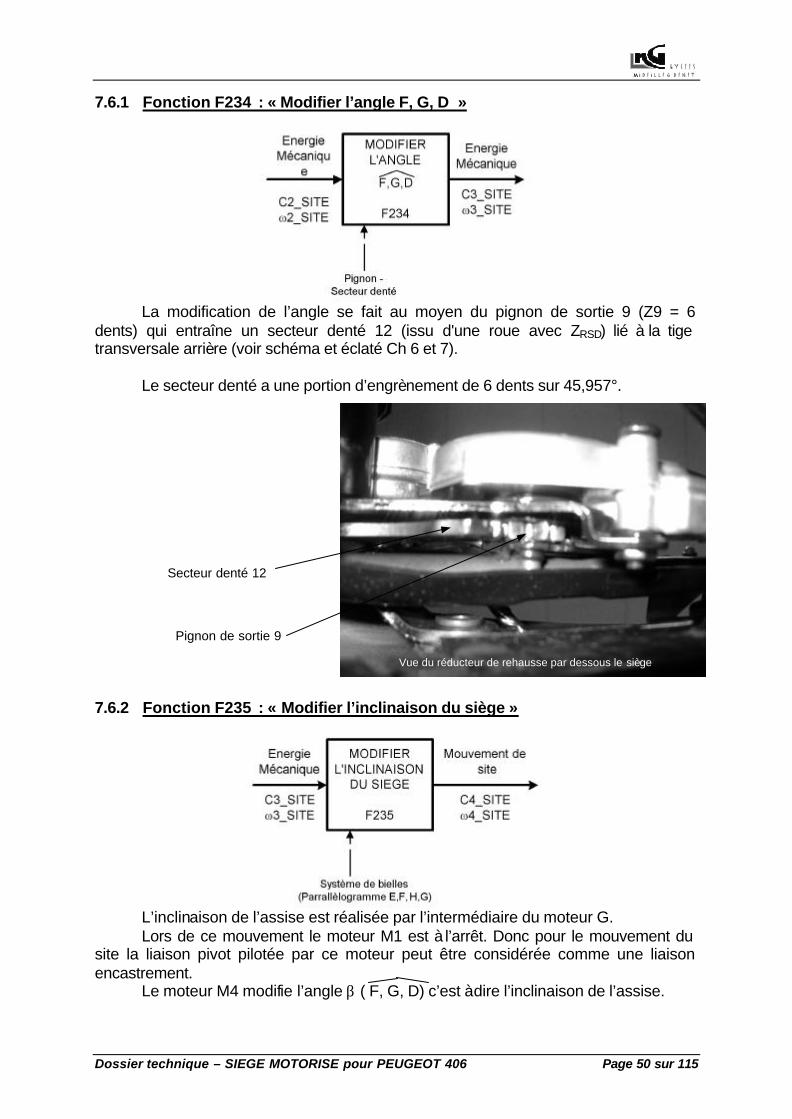
7.6.1 Fonction F234 : « Modifier l’angle F, G, D »
La modification de l’angle se fait au moyen du pignon de sortie 9 (Z9 = 6
dents) qui entraîne un secteur denté 12 (issu d'une roue avec ZRSD) lié à la tige transversale arrière (voir schéma et éclaté Ch 6 et 7).
Le secteur denté a une portion d’engrènement de 6 dents sur 45,957°.
7.6.2 Fonction F235 : « Modifier l’inclinaison du siège »
L’inclinaison de l’assise est réalisée par l’intermédiaire du moteur G. Lors de ce mouvement le moteur M1 est à l’arrêt. Donc pour le mouvement du
site la liaison pivot pilotée par ce moteur peut être considérée comme une liaison encastrement.
Le moteur M4 modifie l’angle β ( F, G, D) c’est à dire l’inclinaison de l’assise.
Vue du réducteur de rehausse par dessous le siège
Secteur denté 12
Pignon de sortie 9
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 51 sur 115
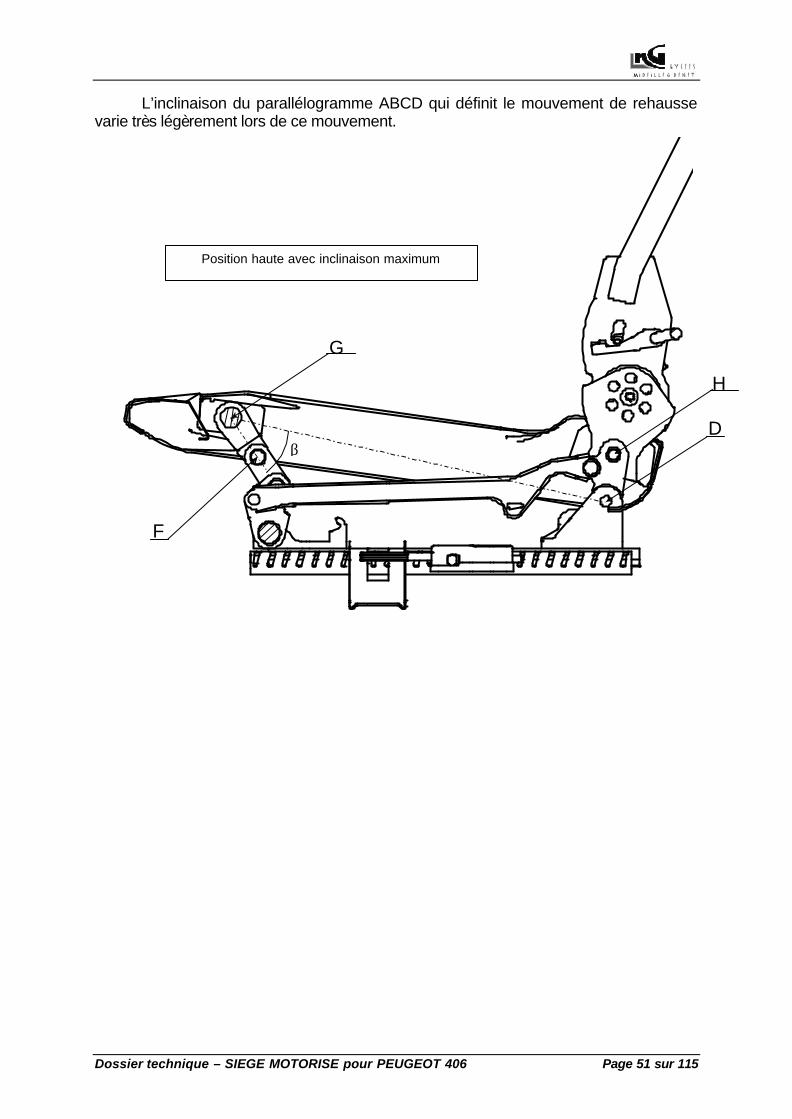
L’inclinaison du parallélogramme ABCD qui définit le mouvement de rehausse varie très légèrement lors de ce mouvement.
Position haute avec inclinaison maximum
G
βD
F
H
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 52 sur 115
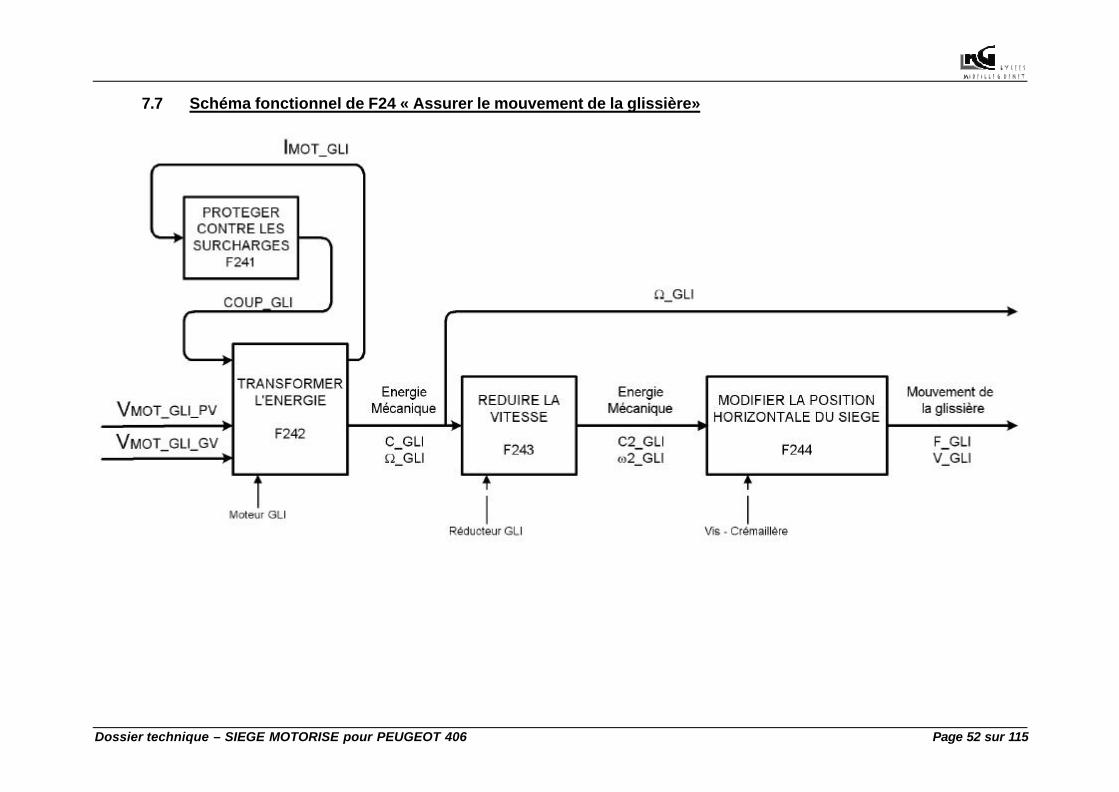
7.7 Schéma fonctionnel de F24 « Assurer le mouvement de la glissière»
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 53 sur 115
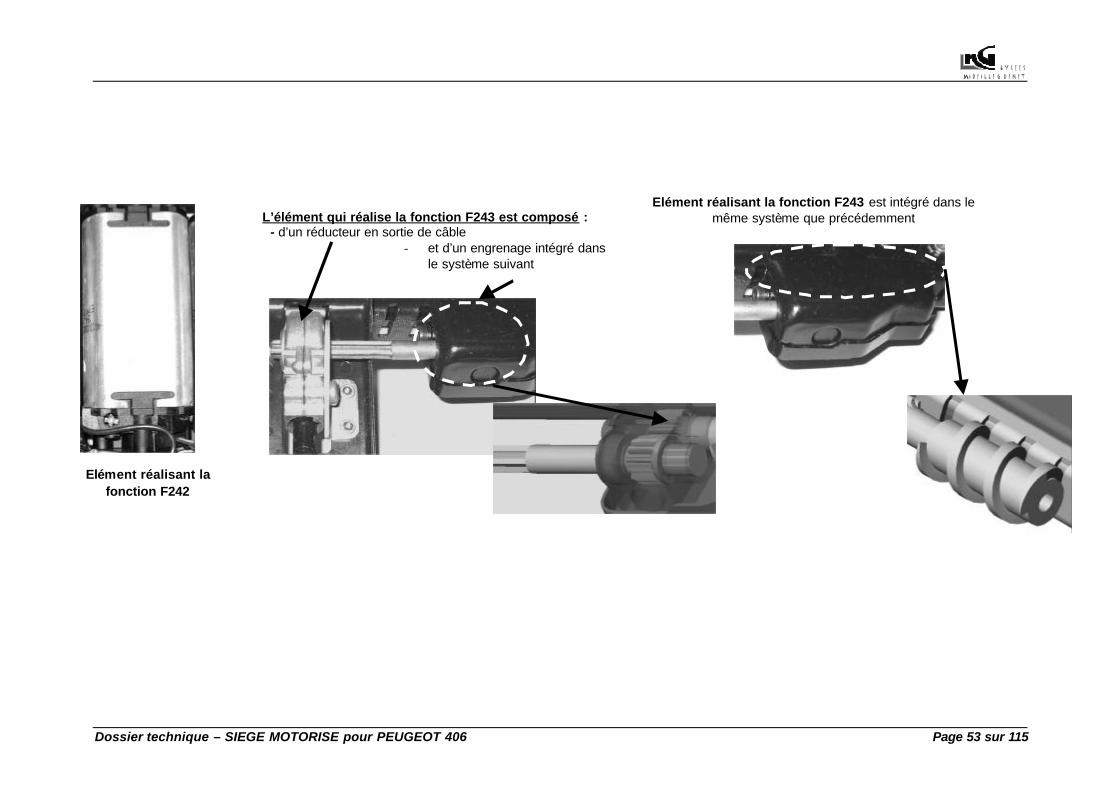
Elément réalisant la fonction F242
L’élément qui réalise la fonction F243 est composé : - d’un réducteur en sortie de câble
- et d’un engrenage intégré dans le système suivant
Elément réalisant la fonction F243 est intégré dans le même système que précédemment

I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 54 sur 115
8. SCHEMAS STRUCTURELS :
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 55 sur 115
8.1 Fonctions F11 « Acquérir la vitesse de rotation » et F12(partiel) « Acquérir les consignes »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 56 sur 115
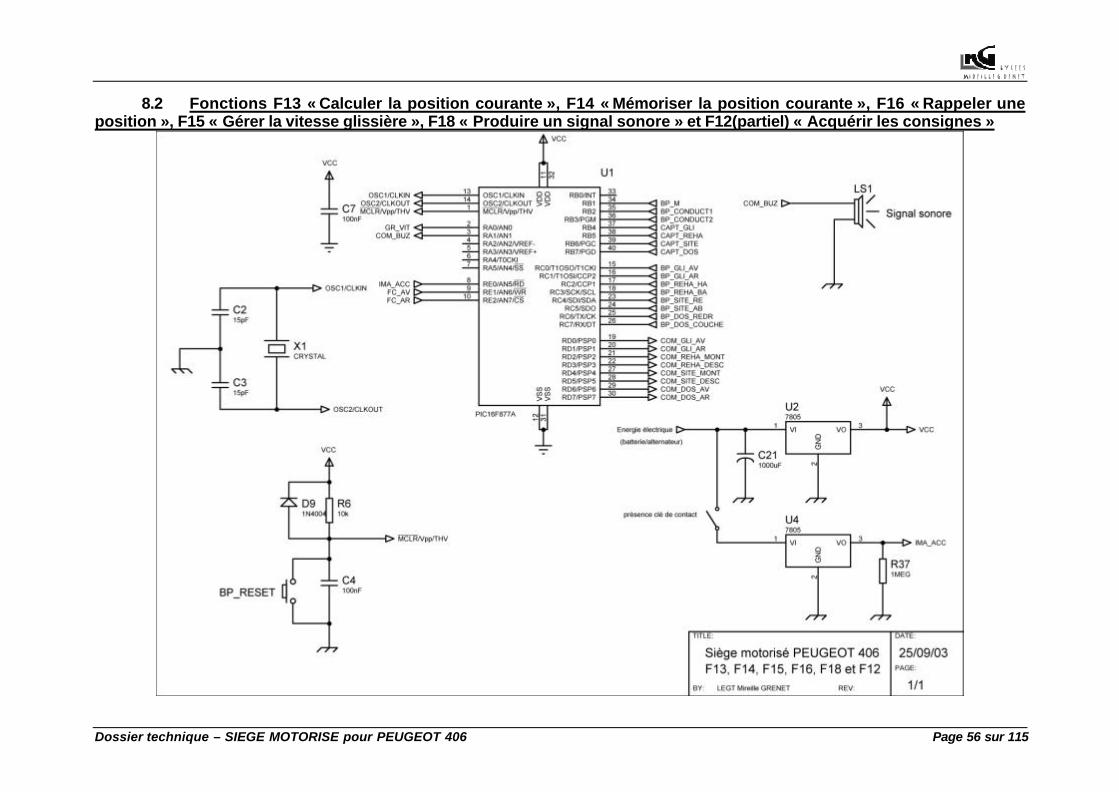
8.2 Fonctions F13 « Calculer la position courante », F14 « Mémoriser la position courante », F16 « Rappeler une position », F15 « Gérer la vitesse glissière », F18 « Produire un signal sonore » et F12(partiel) « Acquérir les consignes »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 57 sur 115
8.3 Fonction F17 « Adapter en puissance »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 58 sur 115
9. ALGORIGRAMMES : 9.1 Programme principal du siège 406
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 59 sur 115
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 60 sur 115
9.2 Sous-programme « GV »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 61 sur 115
9.3 Sous-programme « DETECT_SENS
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 62 sur 115
9.4 Programme d’interruption « CALCULER_LA_POSITION_COURANTE »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 63 sur 115
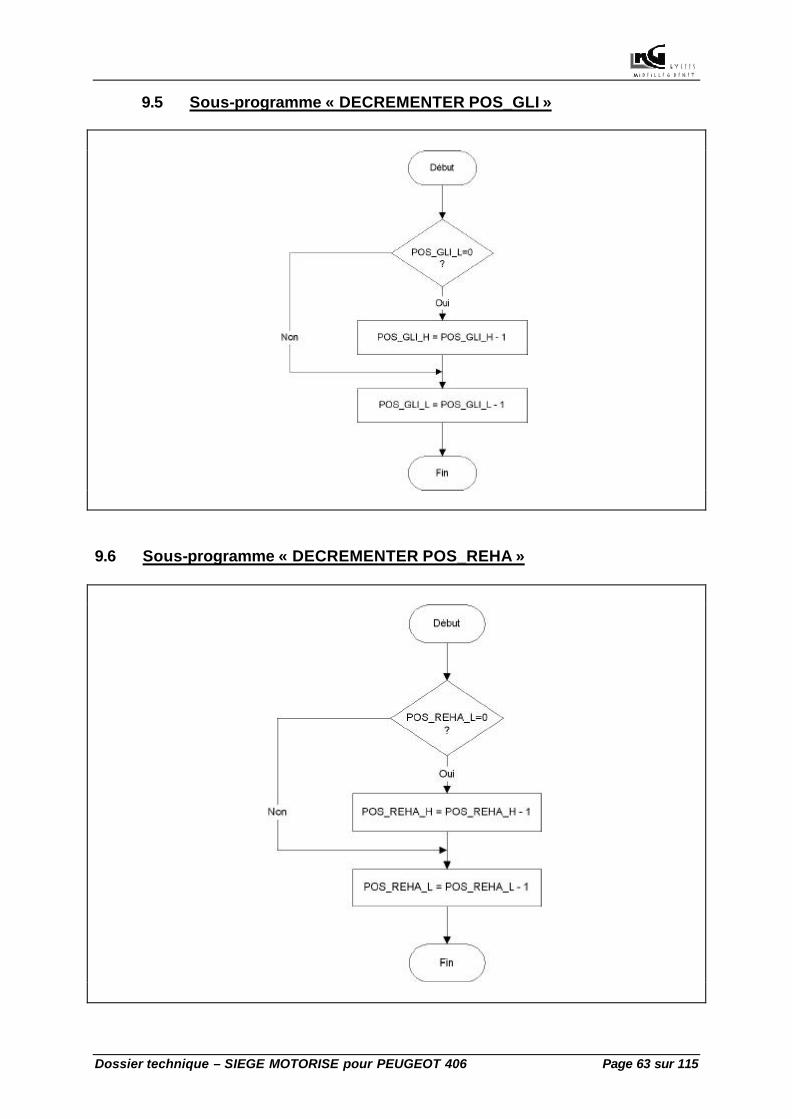
9.5 Sous-programme « DECREMENTER POS_GLI »
9.6 Sous-programme « DECREMENTER POS_REHA »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 64 sur 115
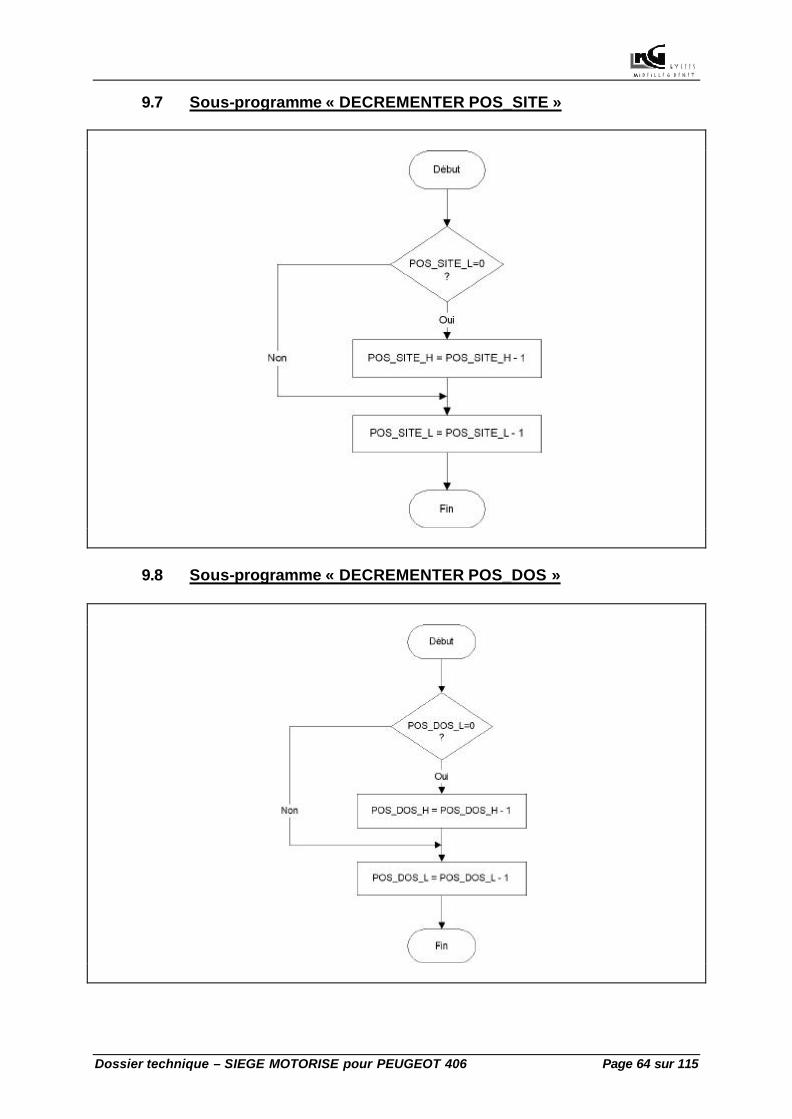
9.7 Sous-programme « DECREMENTER POS_SITE »
9.8 Sous-programme « DECREMENTER POS_DOS »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 65 sur 115
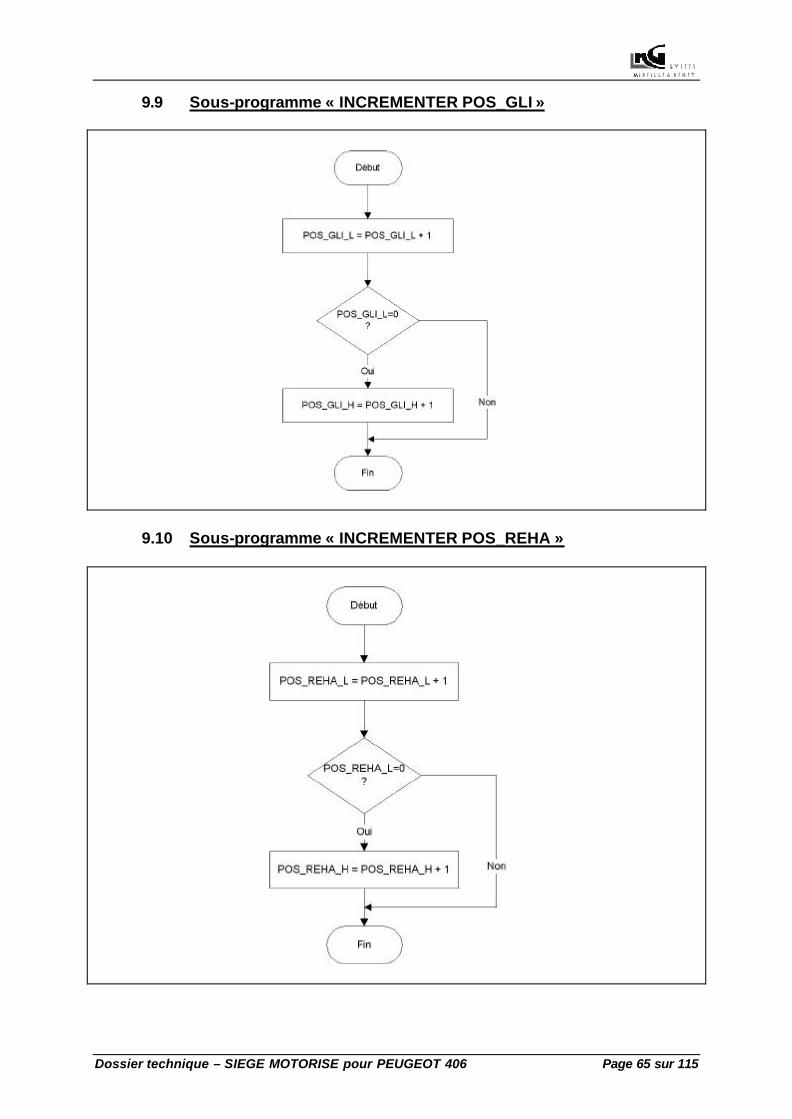
9.9 Sous-programme « INCREMENTER POS_GLI »
9.10 Sous-programme « INCREMENTER POS_REHA »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 66 sur 115
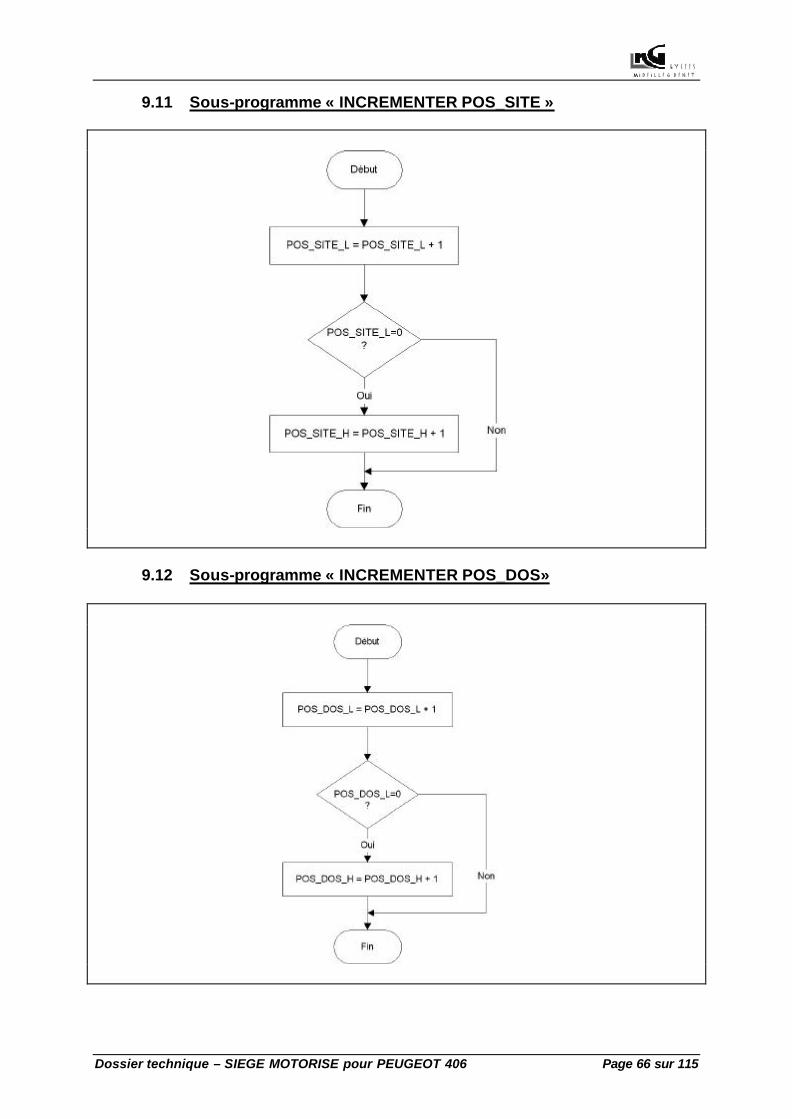
9.11 Sous-programme « INCREMENTER POS_SITE »
9.12 Sous-programme « INCREMENTER POS_DOS»
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 67 sur 115
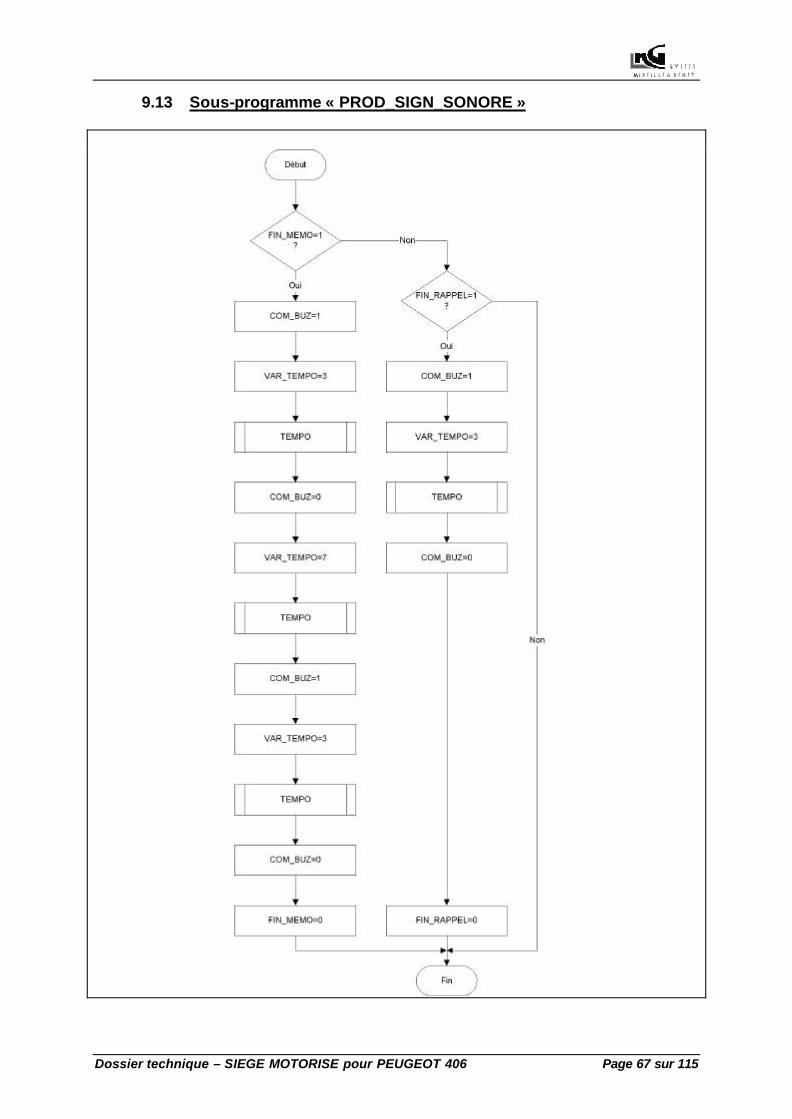
9.13 Sous-programme « PROD_SIGN_SONORE »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 68 sur 115
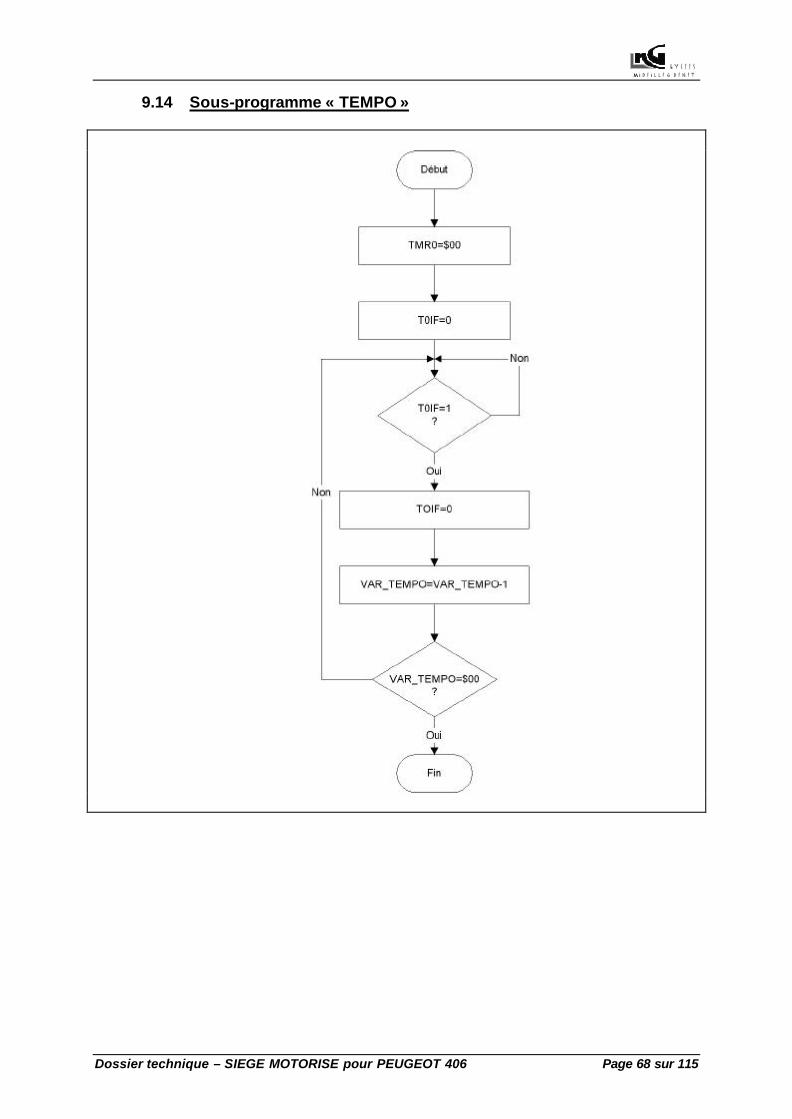
9.14 Sous-programme « TEMPO »
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 69 sur 115
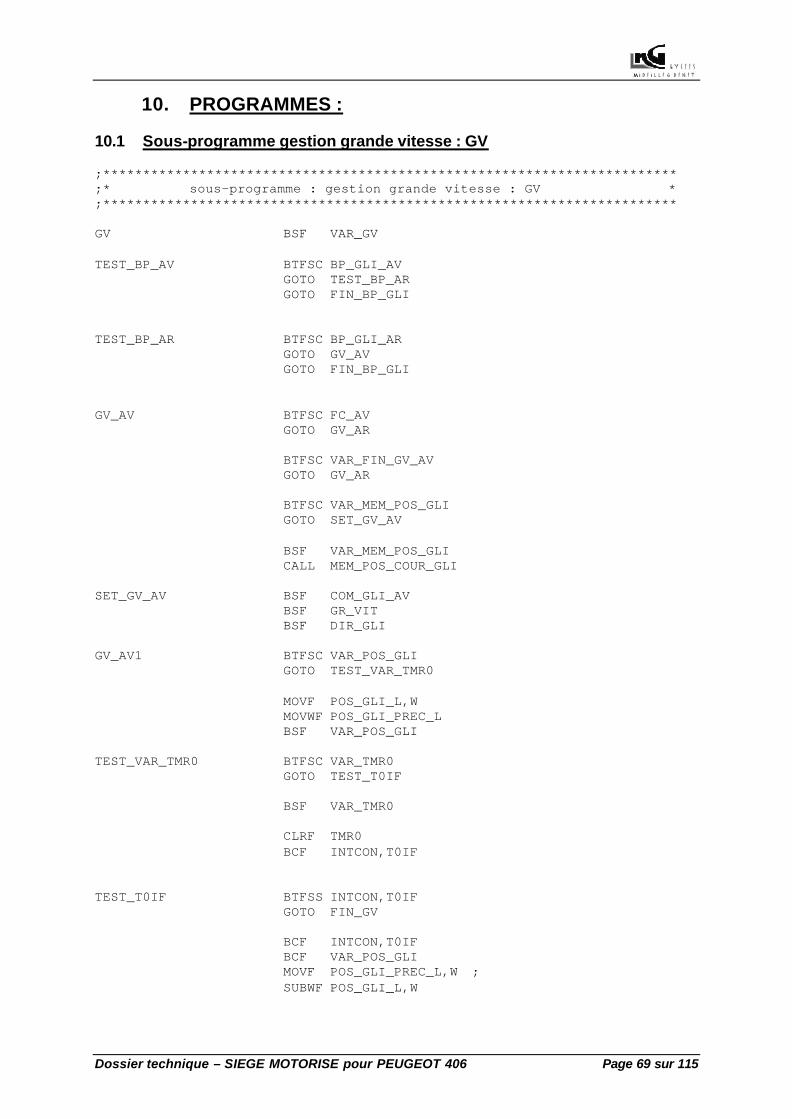
10. PROGRAMMES : 10.1 Sous-programme gestion grande vitesse : GV ;************************************************************************ ;* sous-programme : gestion grande vitesse : GV * ;************************************************************************ GV BSF VAR_GV TEST_BP_AV BTFSC BP_GLI_AV GOTO TEST_BP_AR GOTO FIN_BP_GLI TEST_BP_AR BTFSC BP_GLI_AR GOTO GV_AV GOTO FIN_BP_GLI GV_AV BTFSC FC_AV GOTO GV_AR BTFSC VAR_FIN_GV_AV GOTO GV_AR BTFSC VAR_MEM_POS_GLI GOTO SET_GV_AV BSF VAR_MEM_POS_GLI CALL MEM_POS_COUR_GLI SET_GV_AV BSF COM_GLI_AV BSF GR_VIT BSF DIR_GLI GV_AV1 BTFSC VAR_POS_GLI GOTO TEST_VAR_TMR0 MOVF POS_GLI_L,W MOVWF POS_GLI_PREC_L BSF VAR_POS_GLI TEST_VAR_TMR0 BTFSC VAR_TMR0 GOTO TEST_T0IF BSF VAR_TMR0 CLRF TMR0 BCF INTCON,T0IF TEST_T0IF BTFSS INTCON,T0IF GOTO FIN_GV BCF INTCON,T0IF BCF VAR_POS_GLI MOVF POS_GLI_PREC_L,W ; SUBWF POS_GLI_L,W
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 70 sur 115
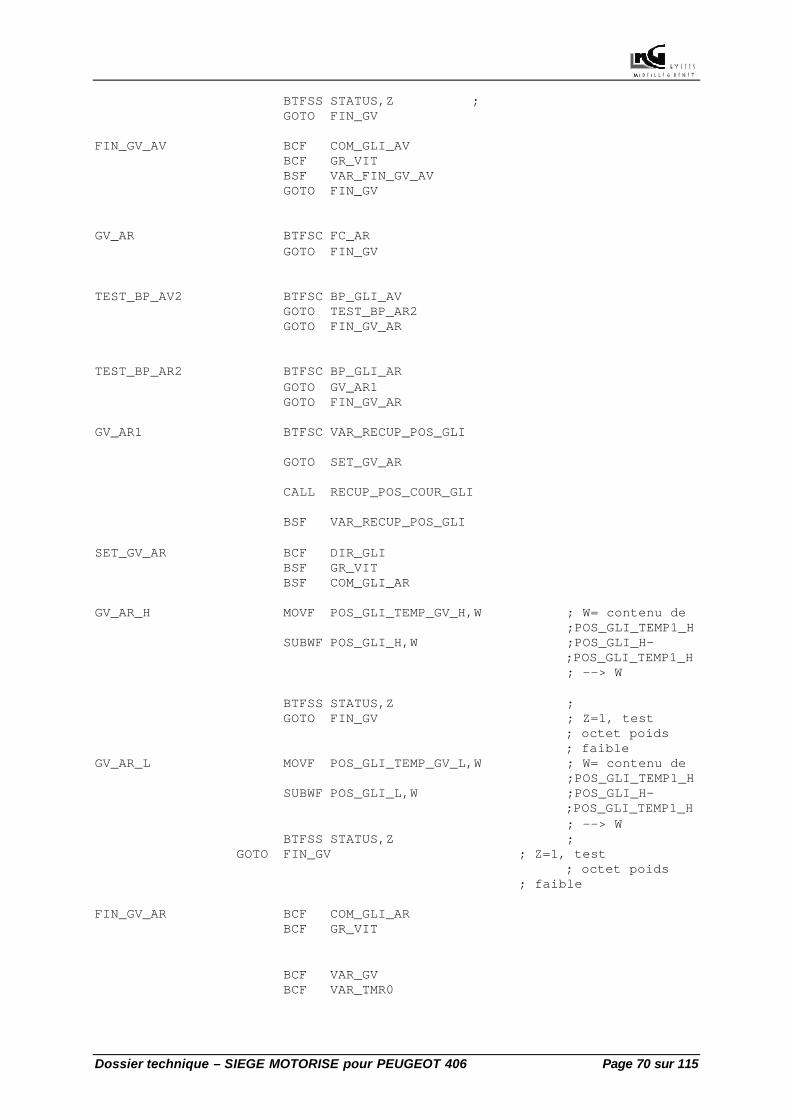
BTFSS STATUS,Z ; GOTO FIN_GV FIN_GV_AV BCF COM_GLI_AV BCF GR_VIT BSF VAR_FIN_GV_AV GOTO FIN_GV GV_AR BTFSC FC_AR GOTO FIN_GV TEST_BP_AV2 BTFSC BP_GLI_AV GOTO TEST_BP_AR2 GOTO FIN_GV_AR TEST_BP_AR2 BTFSC BP_GLI_AR GOTO GV_AR1 GOTO FIN_GV_AR GV_AR1 BTFSC VAR_RECUP_POS_GLI GOTO SET_GV_AR CALL RECUP_POS_COUR_GLI BSF VAR_RECUP_POS_GLI SET_GV_AR BCF DIR_GLI BSF GR_VIT BSF COM_GLI_AR GV_AR_H MOVF POS_GLI_TEMP_GV_H,W ; W= contenu de ;POS_GLI_TEMP1_H SUBWF POS_GLI_H,W ;POS_GLI_H-
;POS_GLI_TEMP1_H ; --> W BTFSS STATUS,Z ; GOTO FIN_GV ; Z=1, test
; octet poids ; faible
GV_AR_L MOVF POS_GLI_TEMP_GV_L,W ; W= contenu de ;POS_GLI_TEMP1_H SUBWF POS_GLI_L,W ;POS_GLI_H-
;POS_GLI_TEMP1_H ; --> W BTFSS STATUS,Z ; GOTO FIN_GV ; Z=1, test
; octet poids ; faible
FIN_GV_AR BCF COM_GLI_AR BCF GR_VIT BCF VAR_GV BCF VAR_TMR0
I R E I L L E R E N E T
Y C E E S L
M G
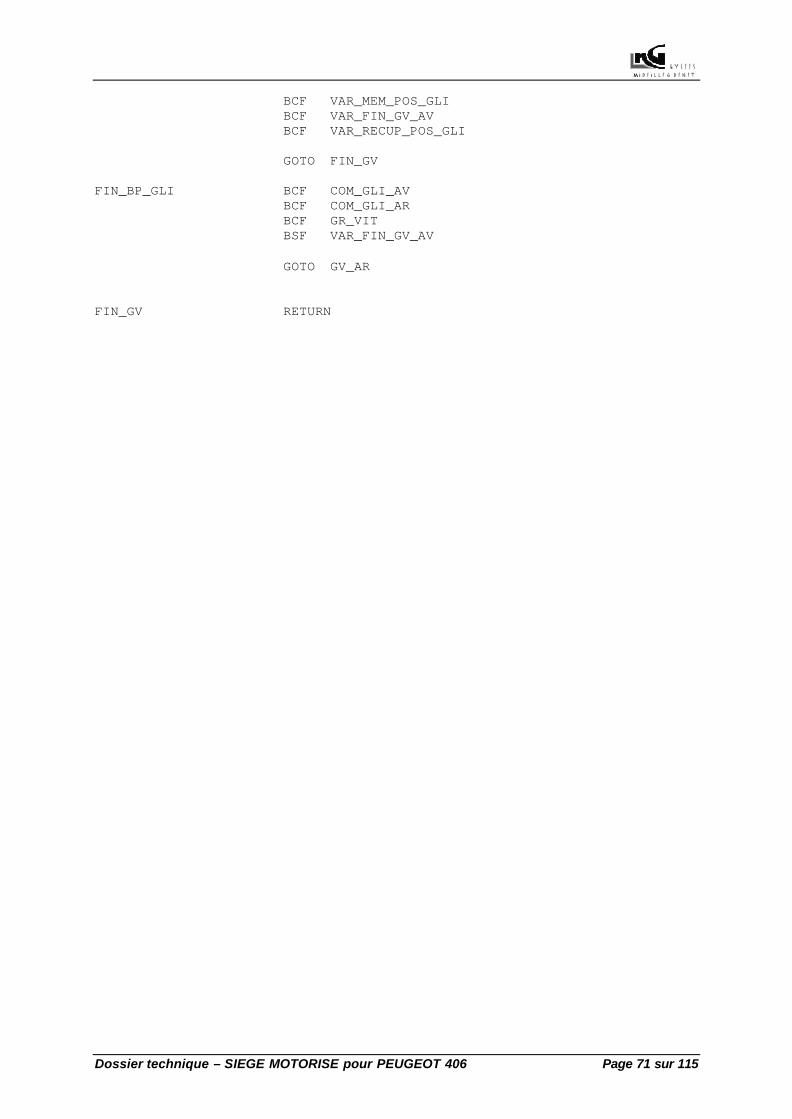
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 71 sur 115
BCF VAR_MEM_POS_GLI BCF VAR_FIN_GV_AV BCF VAR_RECUP_POS_GLI GOTO FIN_GV FIN_BP_GLI BCF COM_GLI_AV BCF COM_GLI_AR BCF GR_VIT BSF VAR_FIN_GV_AV GOTO GV_AR FIN_GV RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 72 sur 115
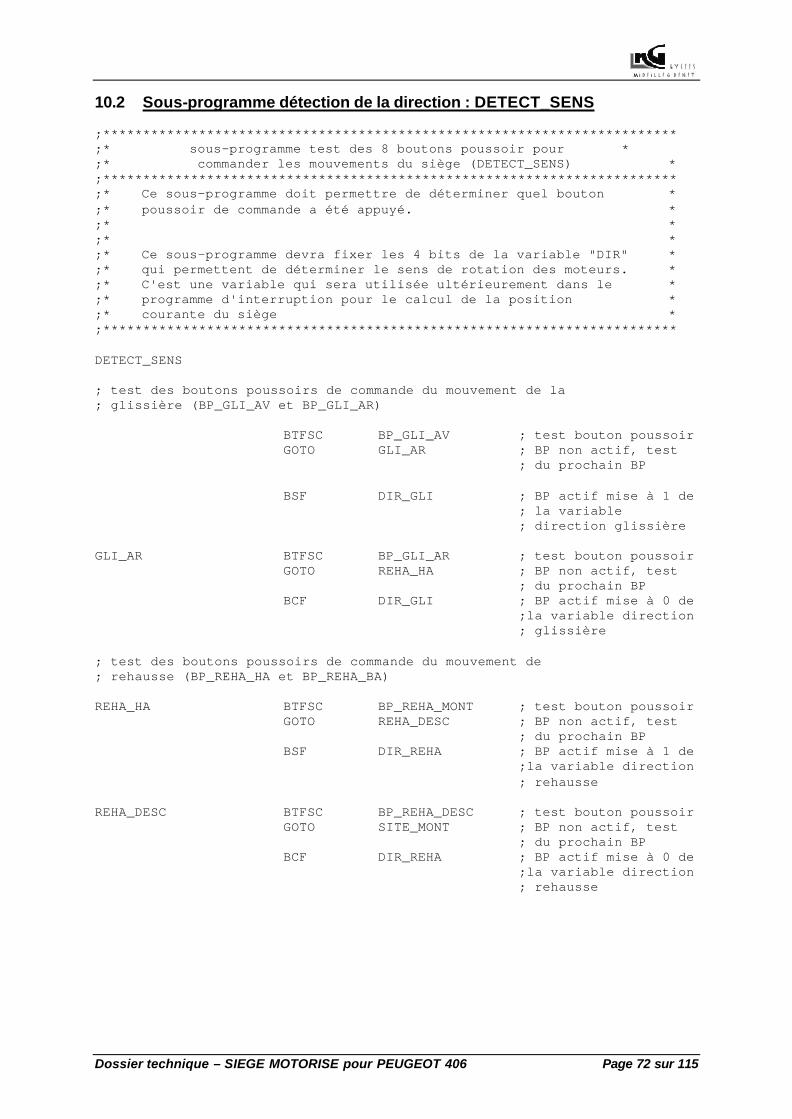
10.2 Sous-programme détection de la direction : DETECT_SENS ;************************************************************************ ;* sous-programme test des 8 boutons poussoir pour * ;* commander les mouvements du siège (DETECT_SENS) * ;************************************************************************ ;* Ce sous-programme doit permettre de déterminer quel bouton * ;* poussoir de commande a été appuyé. * ;* * ;* * ;* Ce sous-programme devra fixer les 4 bits de la variable "DIR" * ;* qui permettent de déterminer le sens de rotation des moteurs. * ;* C'est une variable qui sera utilisée ultérieurement dans le * ;* programme d'interruption pour le calcul de la position * ;* courante du siège * ;************************************************************************ DETECT_SENS ; test des boutons poussoirs de commande du mouvement de la ; glissière (BP_GLI_AV et BP_GLI_AR) BTFSC BP_GLI_AV ; test bouton poussoir GOTO GLI_AR ; BP non actif, test
; du prochain BP BSF DIR_GLI ; BP actif mise à 1 de
; la variable ; direction glissière
GLI_AR BTFSC BP_GLI_AR ; test bouton poussoir GOTO REHA_HA ; BP non actif, test
; du prochain BP BCF DIR_GLI ; BP actif mise à 0 de ;la variable direction ; glissière ; test des boutons poussoirs de commande du mouvement de ; rehausse (BP_REHA_HA et BP_REHA_BA) REHA_HA BTFSC BP_REHA_MONT ; test bouton poussoir GOTO REHA_DESC ; BP non actif, test
; du prochain BP BSF DIR_REHA ; BP actif mise à 1 de ;la variable direction ; rehausse REHA_DESC BTFSC BP_REHA_DESC ; test bouton poussoir
GOTO SITE_MONT ; BP non actif, test ; du prochain BP
BCF DIR_REHA ; BP actif mise à 0 de ;la variable direction ; rehausse
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 73 sur 115
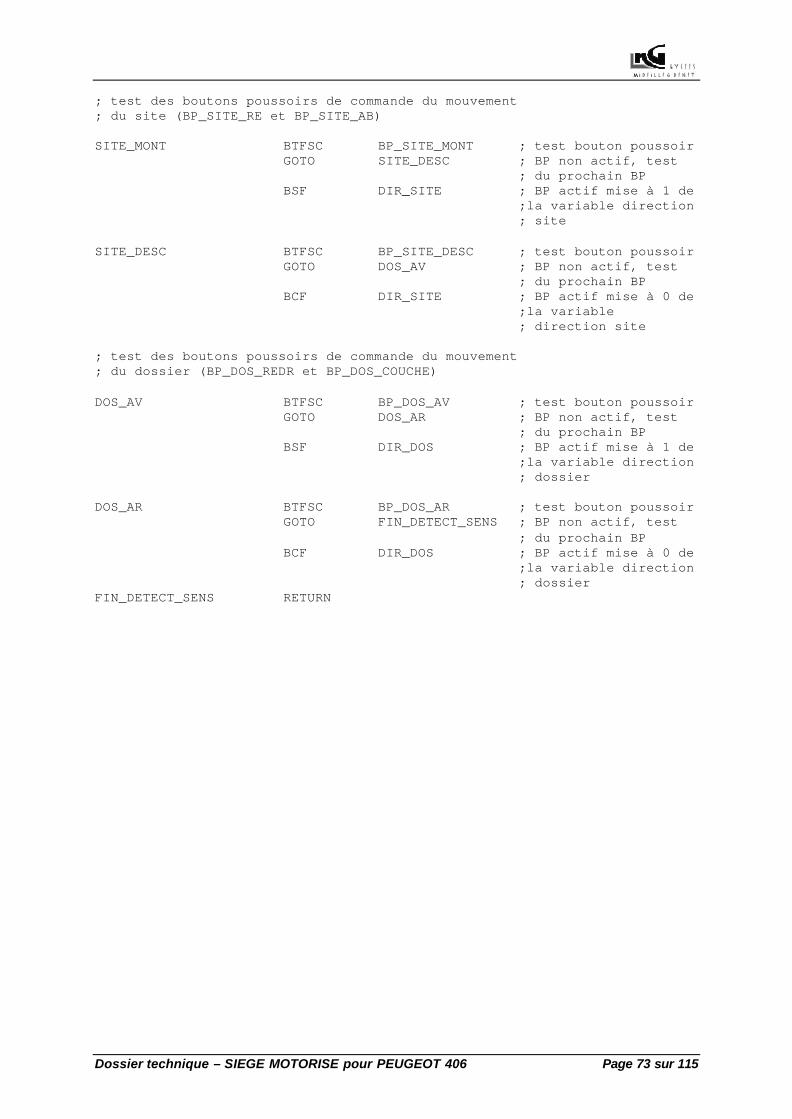
; test des boutons poussoirs de commande du mouvement ; du site (BP_SITE_RE et BP_SITE_AB) SITE_MONT BTFSC BP_SITE_MONT ; test bouton poussoir GOTO SITE_DESC ; BP non actif, test ; du prochain BP BSF DIR_SITE ; BP actif mise à 1 de
;la variable direction ; site SITE_DESC BTFSC BP_SITE_DESC ; test bouton poussoir GOTO DOS_AV ; BP non actif, test ; du prochain BP BCF DIR_SITE ; BP actif mise à 0 de ;la variable
; direction site ; test des boutons poussoirs de commande du mouvement ; du dossier (BP_DOS_REDR et BP_DOS_COUCHE) DOS_AV BTFSC BP_DOS_AV ; test bouton poussoir GOTO DOS_AR ; BP non actif, test ; du prochain BP BSF DIR_DOS ; BP actif mise à 1 de ;la variable direction ; dossier DOS_AR BTFSC BP_DOS_AR ; test bouton poussoir GOTO FIN_DETECT_SENS ; BP non actif, test ; du prochain BP BCF DIR_DOS ; BP actif mise à 0 de ;la variable direction ; dossier FIN_DETECT_SENS RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 74 sur 115
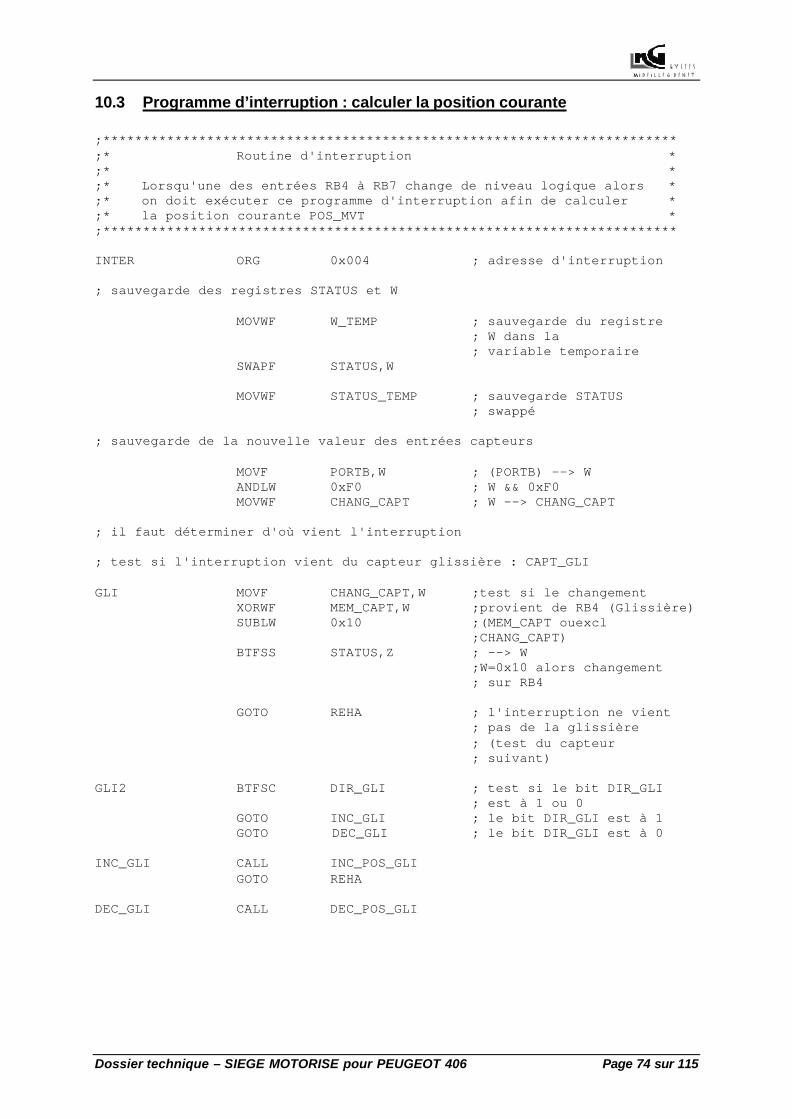
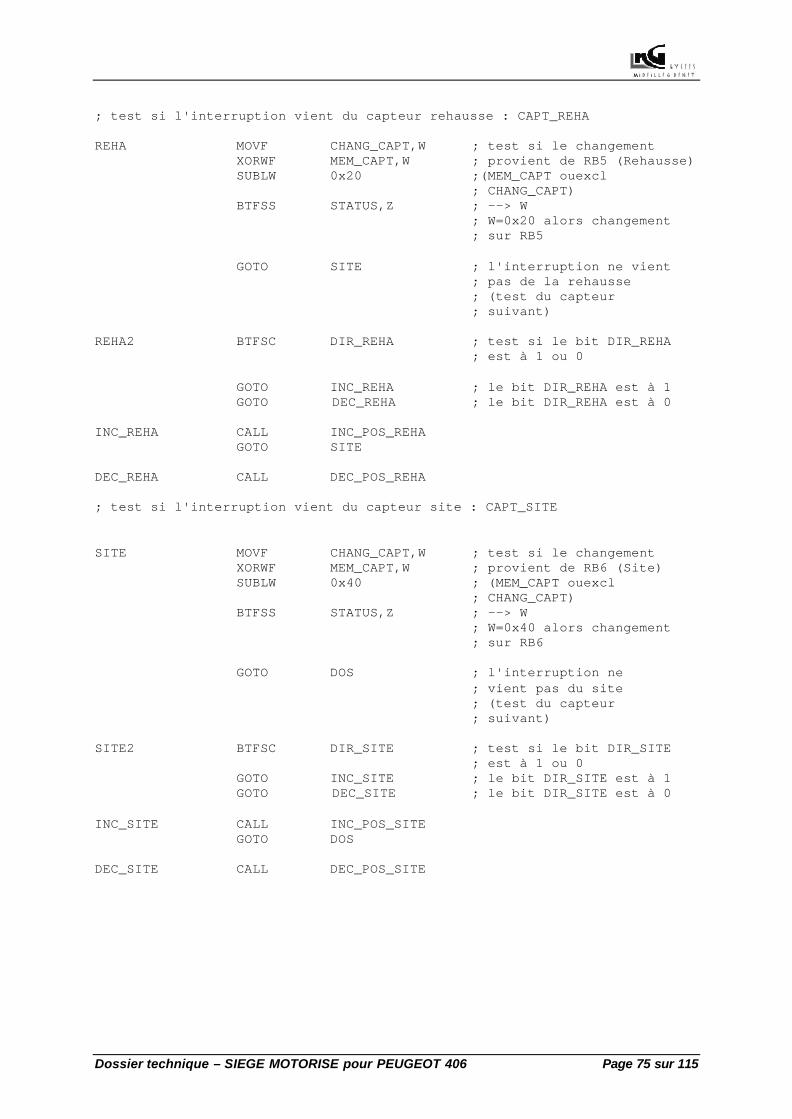
10.3 Programme d’interruption : calculer la position courante ;************************************************************************ ;* Routine d'interruption * ;* * ;* Lorsqu'une des entrées RB4 à RB7 change de niveau logique alors * ;* on doit exécuter ce programme d'interruption afin de calculer * ;* la position courante POS_MVT * ;************************************************************************ INTER ORG 0x004 ; adresse d'interruption ; sauvegarde des registres STATUS et W MOVWF W_TEMP ; sauvegarde du registre ; W dans la ; variable temporaire SWAPF STATUS,W MOVWF STATUS_TEMP ; sauvegarde STATUS ; swappé ; sauvegarde de la nouvelle valeur des entrées capteurs MOVF PORTB,W ; (PORTB) --> W ANDLW 0xF0 ; W && 0xF0 MOVWF CHANG_CAPT ; W --> CHANG_CAPT ; il faut déterminer d'où vient l'interruption ; test si l'interruption vient du capteur glissière : CAPT_GLI GLI MOVF CHANG_CAPT,W ;test si le changement XORWF MEM_CAPT,W ;provient de RB4 (Glissière) SUBLW 0x10 ;(MEM_CAPT ouexcl
;CHANG_CAPT) BTFSS STATUS,Z ; --> W ;W=0x10 alors changement
; sur RB4 GOTO REHA ; l'interruption ne vient ; pas de la glissière ; (test du capteur ; suivant) GLI2 BTFSC DIR_GLI ; test si le bit DIR_GLI ; est à 1 ou 0 GOTO INC_GLI ; le bit DIR_GLI est à 1 GOTO DEC_GLI ; le bit DIR_GLI est à 0 INC_GLI CALL INC_POS_GLI GOTO REHA DEC_GLI CALL DEC_POS_GLI
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 75 sur 115
; test si l'interruption vient du capteur rehausse : CAPT_REHA REHA MOVF CHANG_CAPT,W ; test si le changement XORWF MEM_CAPT,W ; provient de RB5 (Rehausse) SUBLW 0x20 ;(MEM_CAPT ouexcl
; CHANG_CAPT) BTFSS STATUS,Z ; --> W ; W=0x20 alors changement
; sur RB5 GOTO SITE ; l'interruption ne vient ; pas de la rehausse ; (test du capteur ; suivant) REHA2 BTFSC DIR_REHA ; test si le bit DIR_REHA ; est à 1 ou 0 GOTO INC_REHA ; le bit DIR_REHA est à 1 GOTO DEC_REHA ; le bit DIR_REHA est à 0 INC_REHA CALL INC_POS_REHA GOTO SITE DEC_REHA CALL DEC_POS_REHA ; test si l'interruption vient du capteur site : CAPT_SITE SITE MOVF CHANG_CAPT,W ; test si le changement XORWF MEM_CAPT,W ; provient de RB6 (Site) SUBLW 0x40 ; (MEM_CAPT ouexcl
; CHANG_CAPT) BTFSS STATUS,Z ; --> W ; W=0x40 alors changement
; sur RB6 GOTO DOS ; l'interruption ne ; vient pas du site ; (test du capteur ; suivant) SITE2 BTFSC DIR_SITE ; test si le bit DIR_SITE ; est à 1 ou 0 GOTO INC_SITE ; le bit DIR_SITE est à 1 GOTO DEC_SITE ; le bit DIR_SITE est à 0 INC_SITE CALL INC_POS_SITE GOTO DOS DEC_SITE CALL DEC_POS_SITE
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 76 sur 115
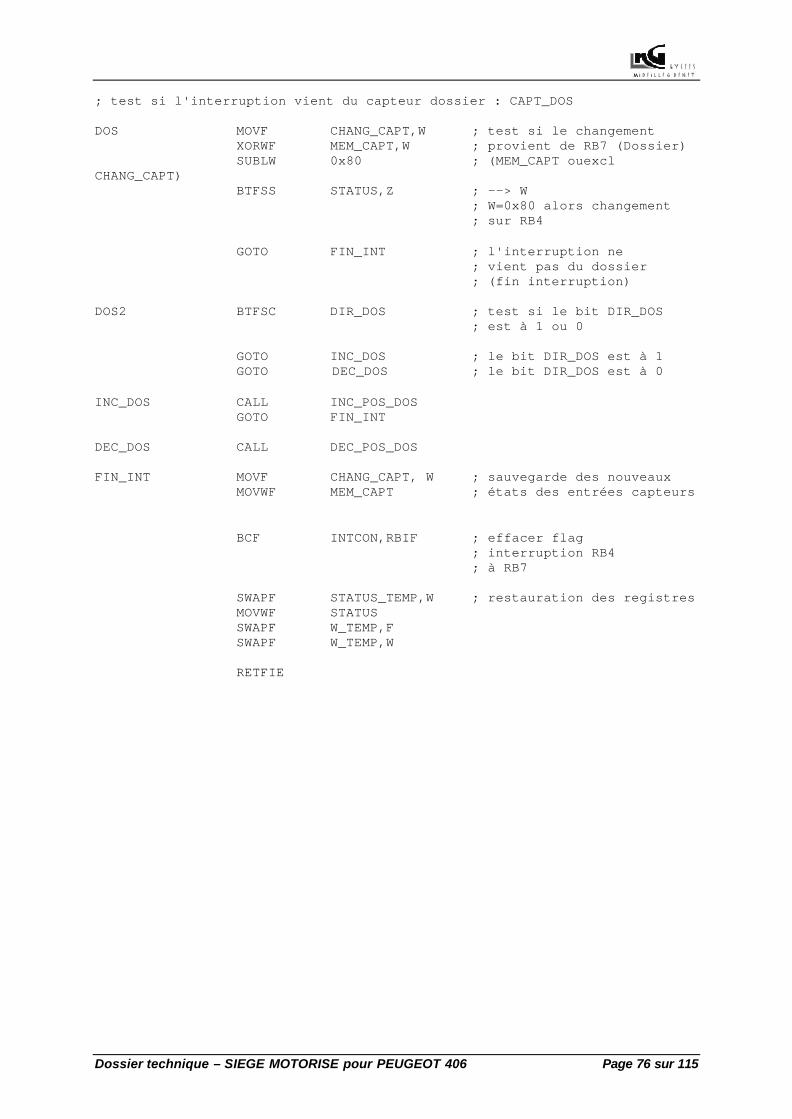
; test si l'interruption vient du capteur dossier : CAPT_DOS DOS MOVF CHANG_CAPT,W ; test si le changement XORWF MEM_CAPT,W ; provient de RB7 (Dossier) SUBLW 0x80 ; (MEM_CAPT ouexcl CHANG_CAPT) BTFSS STATUS,Z ; --> W ; W=0x80 alors changement
; sur RB4 GOTO FIN_INT ; l'interruption ne ; vient pas du dossier ; (fin interruption) DOS2 BTFSC DIR_DOS ; test si le bit DIR_DOS ; est à 1 ou 0 GOTO INC_DOS ; le bit DIR_DOS est à 1 GOTO DEC_DOS ; le bit DIR_DOS est à 0 INC_DOS CALL INC_POS_DOS GOTO FIN_INT DEC_DOS CALL DEC_POS_DOS FIN_INT MOVF CHANG_CAPT, W ; sauvegarde des nouveaux MOVWF MEM_CAPT ; états des entrées capteurs BCF INTCON,RBIF ; effacer flag ; interruption RB4 ; à RB7 SWAPF STATUS_TEMP,W ; restauration des registres MOVWF STATUS SWAPF W_TEMP,F SWAPF W_TEMP,W RETFIE
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 77 sur 115
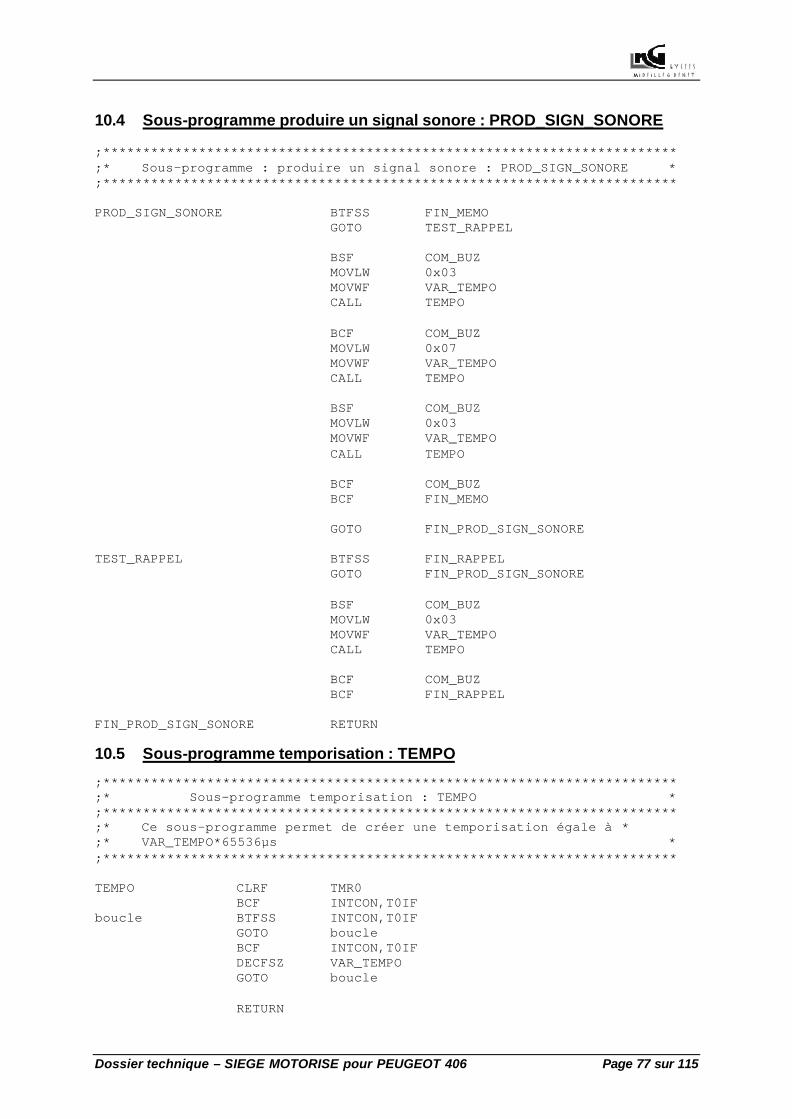
10.4 Sous-programme produire un signal sonore : PROD_SIGN_SONORE ;************************************************************************ ;* Sous-programme : produire un signal sonore : PROD_SIGN_SONORE * ;************************************************************************ PROD_SIGN_SONORE BTFSS FIN_MEMO GOTO TEST_RAPPEL BSF COM_BUZ MOVLW 0x03 MOVWF VAR_TEMPO CALL TEMPO BCF COM_BUZ MOVLW 0x07 MOVWF VAR_TEMPO CALL TEMPO BSF COM_BUZ MOVLW 0x03 MOVWF VAR_TEMPO CALL TEMPO BCF COM_BUZ BCF FIN_MEMO GOTO FIN_PROD_SIGN_SONORE TEST_RAPPEL BTFSS FIN_RAPPEL GOTO FIN_PROD_SIGN_SONORE BSF COM_BUZ MOVLW 0x03 MOVWF VAR_TEMPO CALL TEMPO BCF COM_BUZ BCF FIN_RAPPEL FIN_PROD_SIGN_SONORE RETURN
10.5 Sous-programme temporisation : TEMPO ;************************************************************************ ;* Sous-programme temporisation : TEMPO * ;************************************************************************ ;* Ce sous-programme permet de créer une temporisation égale à * ;* VAR_TEMPO*65536µs * ;************************************************************************ TEMPO CLRF TMR0 BCF INTCON,T0IF boucle BTFSS INTCON,T0IF GOTO boucle BCF INTCON,T0IF DECFSZ VAR_TEMPO GOTO boucle RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 78 sur 115
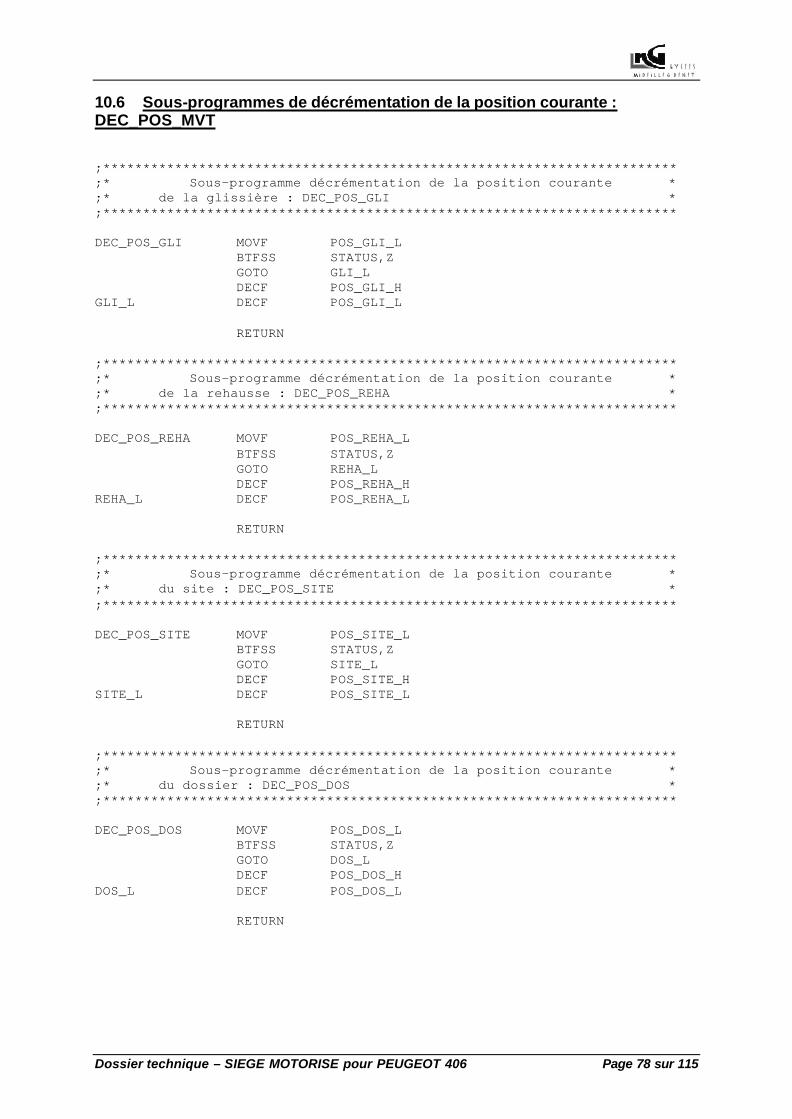
10.6 Sous-programmes de décrémentation de la position courante : DEC_POS_MVT ;************************************************************************ ;* Sous-programme décrémentation de la position courante * ;* de la glissière : DEC_POS_GLI * ;************************************************************************ DEC_POS_GLI MOVF POS_GLI_L BTFSS STATUS,Z GOTO GLI_L DECF POS_GLI_H GLI_L DECF POS_GLI_L RETURN ;************************************************************************ ;* Sous-programme décrémentation de la position courante * ;* de la rehausse : DEC_POS_REHA * ;************************************************************************ DEC_POS_REHA MOVF POS_REHA_L BTFSS STATUS,Z GOTO REHA_L DECF POS_REHA_H REHA_L DECF POS_REHA_L RETURN ;************************************************************************ ;* Sous-programme décrémentation de la position courante * ;* du site : DEC_POS_SITE * ;************************************************************************ DEC_POS_SITE MOVF POS_SITE_L BTFSS STATUS,Z GOTO SITE_L DECF POS_SITE_H SITE_L DECF POS_SITE_L RETURN ;************************************************************************ ;* Sous-programme décrémentation de la position courante * ;* du dossier : DEC_POS_DOS * ;************************************************************************ DEC_POS_DOS MOVF POS_DOS_L BTFSS STATUS,Z GOTO DOS_L DECF POS_DOS_H DOS_L DECF POS_DOS_L RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 79 sur 115
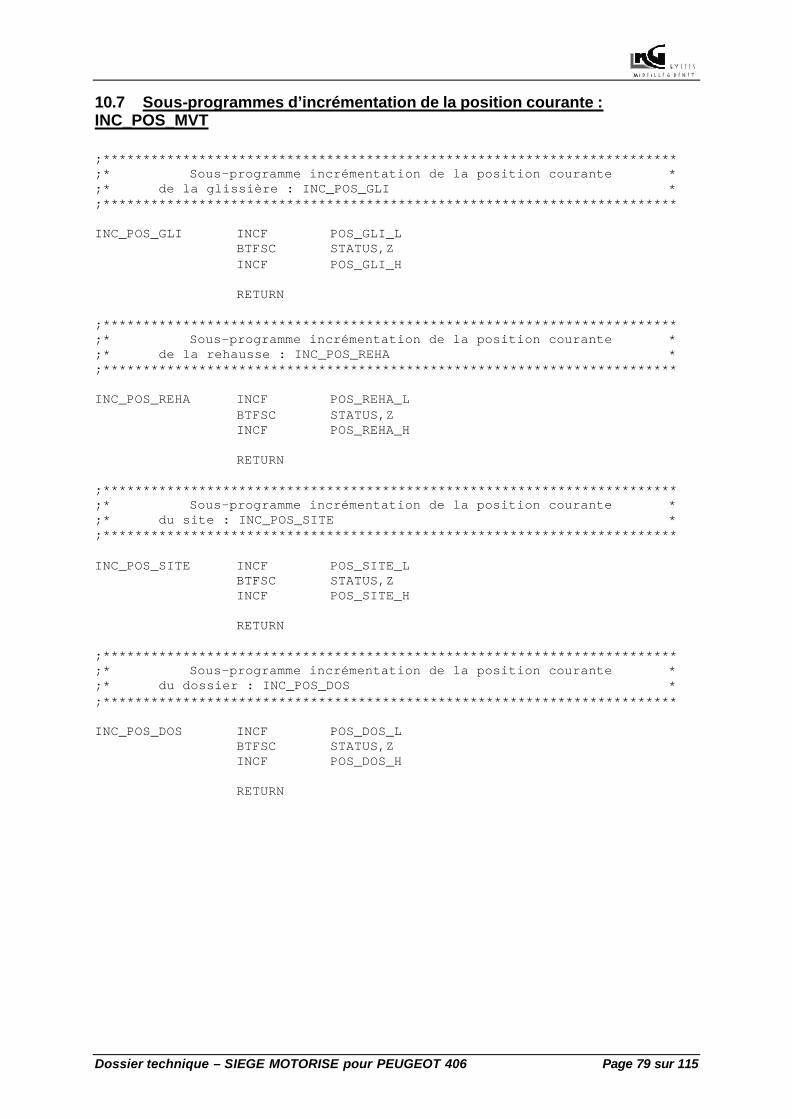
10.7 Sous-programmes d’incrémentation de la position courante : INC_POS_MVT ;************************************************************************ ;* Sous-programme incrémentation de la position courante * ;* de la glissière : INC_POS_GLI * ;************************************************************************ INC_POS_GLI INCF POS_GLI_L BTFSC STATUS,Z INCF POS_GLI_H
RETURN ;************************************************************************ ;* Sous-programme incrémentation de la position courante * ;* de la rehausse : INC_POS_REHA * ;************************************************************************ INC_POS_REHA INCF POS_REHA_L BTFSC STATUS,Z INCF POS_REHA_H RETURN ;************************************************************************ ;* Sous-programme incrémentation de la position courante * ;* du site : INC_POS_SITE * ;************************************************************************ INC_POS_SITE INCF POS_SITE_L BTFSC STATUS,Z INCF POS_SITE_H RETURN ;************************************************************************ ;* Sous-programme incrémentation de la position courante * ;* du dossier : INC_POS_DOS * ;************************************************************************ INC_POS_DOS INCF POS_DOS_L BTFSC STATUS,Z INCF POS_DOS_H RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 80 sur 115
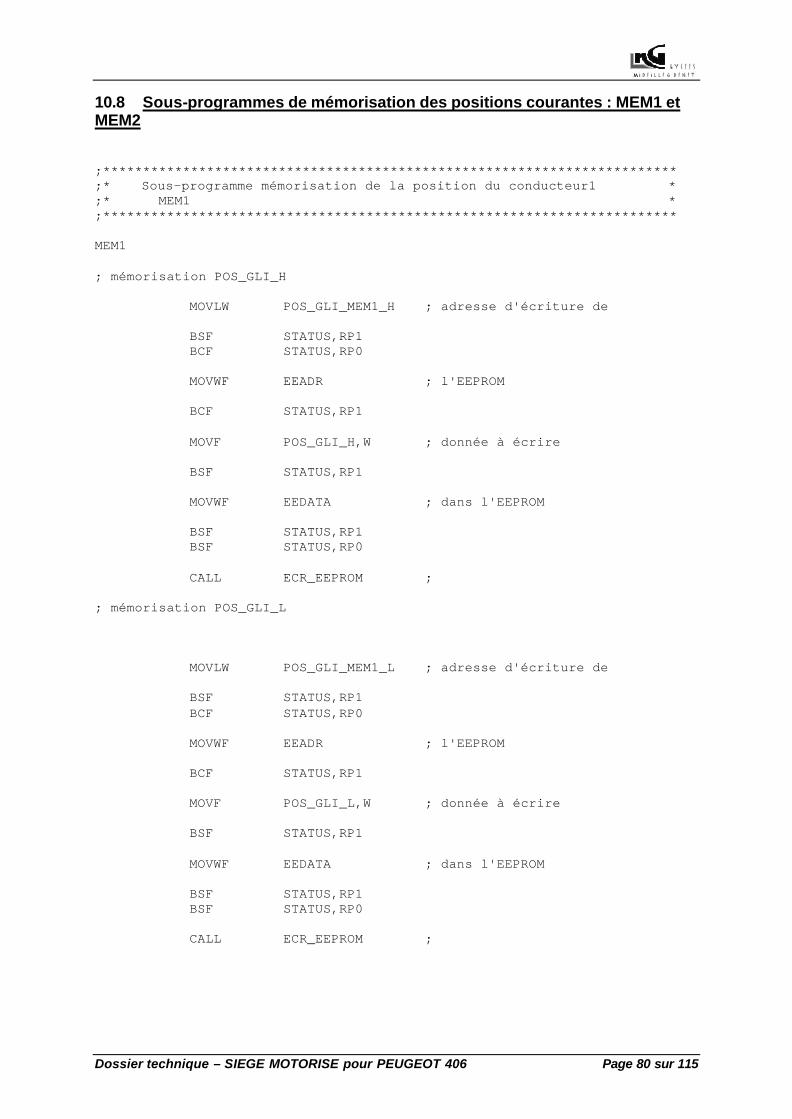
10.8 Sous-programmes de mémorisation des positions courantes : MEM1 et MEM2 ;************************************************************************ ;* Sous-programme mémorisation de la position du conducteur1 * ;* MEM1 * ;************************************************************************ MEM1 ; mémorisation POS_GLI_H MOVLW POS_GLI_MEM1_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_GLI_L MOVLW POS_GLI_MEM1_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 81 sur 115
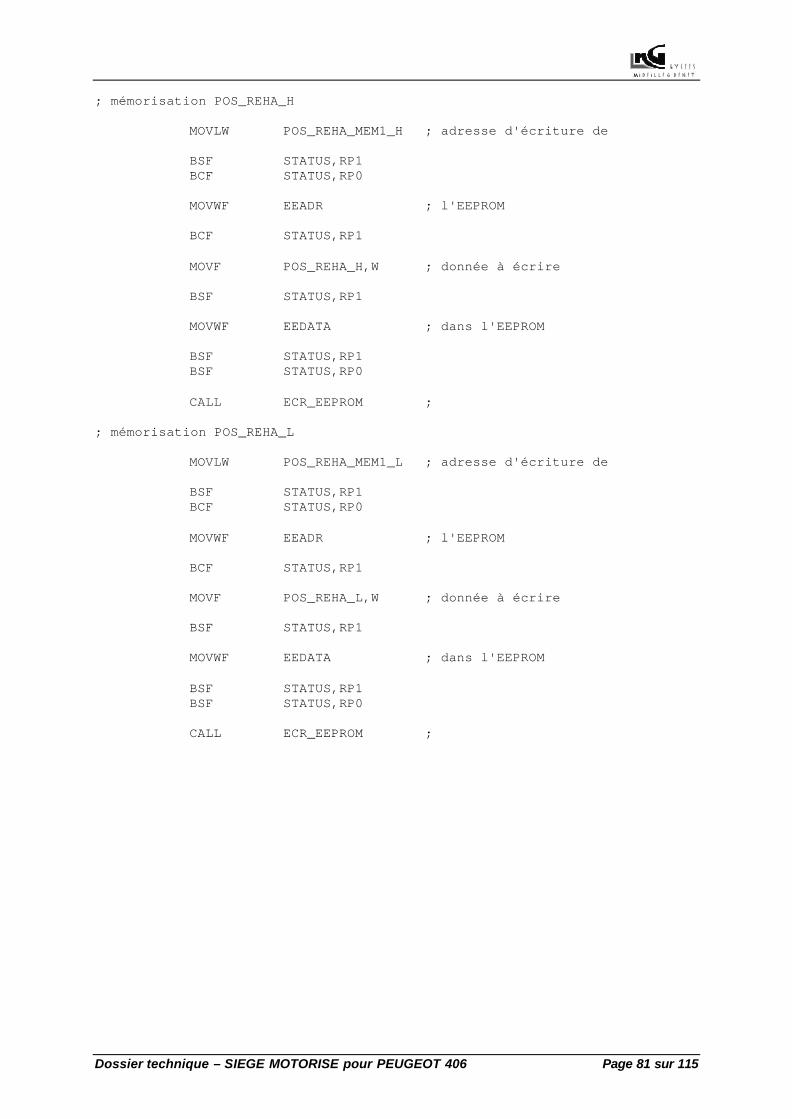
; mémorisation POS_REHA_H MOVLW POS_REHA_MEM1_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_REHA_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_REHA_L MOVLW POS_REHA_MEM1_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_REHA_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 82 sur 115
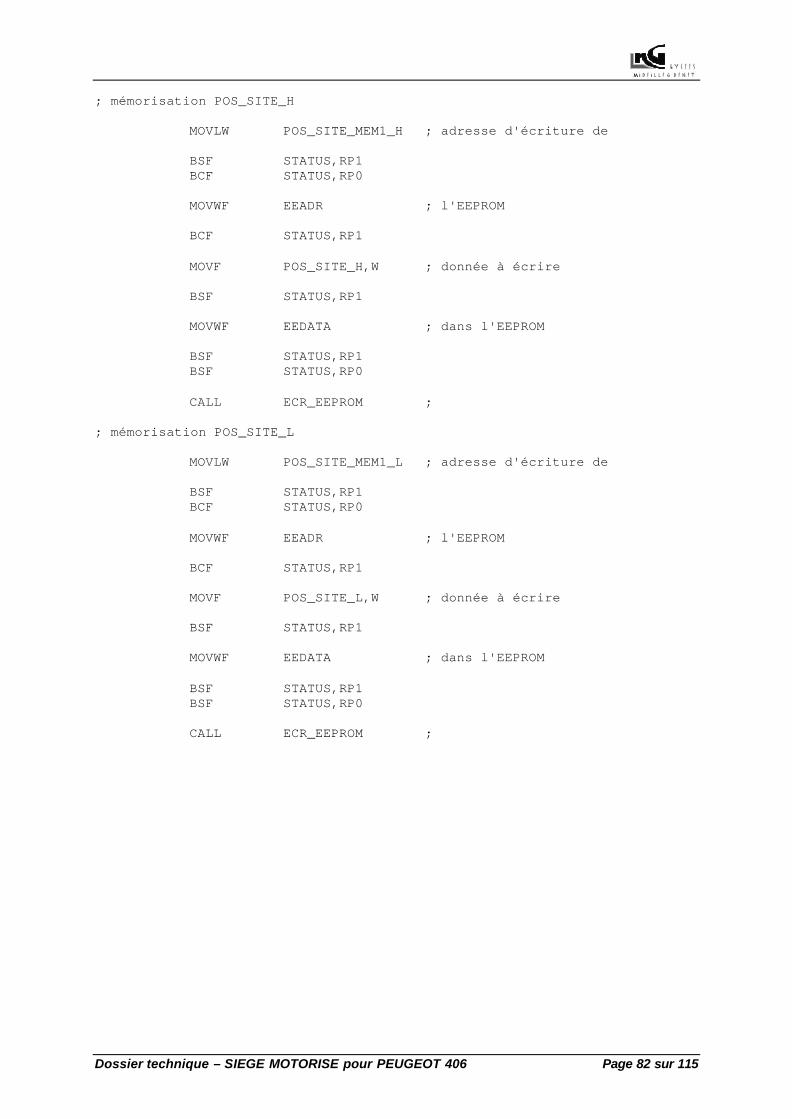
; mémorisation POS_SITE_H MOVLW POS_SITE_MEM1_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_SITE_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_SITE_L MOVLW POS_SITE_MEM1_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_SITE_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 83 sur 115
; mémorisation POS_DOS_H MOVLW POS_DOS_MEM1_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_DOS_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_DOS_L MOVLW POS_DOS_MEM1_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_DOS_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 84 sur 115
;************************************************************************ ;* Sous programme mémorisation de la position du conducteur2 * ;* MEM2 * ;************************************************************************ MEM2 ; mémorisation POS_GLI_H MOVLW POS_GLI_MEM2_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_GLI_L MOVLW POS_GLI_MEM2_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 85 sur 115
; mémorisation POS_REHA_H MOVLW POS_REHA_MEM2_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_REHA_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_REHA_L MOVLW POS_REHA_MEM2_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_REHA_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 86 sur 115
; mémorisation POS_SITE_H MOVLW POS_SITE_MEM2_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_SITE_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_SITE_L MOVLW POS_SITE_MEM2_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_SITE_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ;
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 87 sur 115
; mémorisation POS_DOS_H MOVLW POS_DOS_MEM2_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_DOS_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_DOS_L MOVLW POS_DOS_MEM2_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_DOS_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 88 sur 115
10.9 Sous-programmes de mémorisation de la position courante de la glissière : MEM_POS_COUR_GLI ;************************************************************************ ;* Sous-programme mémorisation de la position courante de la * ;* glissière : MEM_POS_COUR_GLI * ;************************************************************************ MEM_POS_COUR_GLI ; mémorisation POS_GLI_H MOVLW POS_COUR_GLI_H ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_H,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; ; mémorisation POS_GLI_L MOVLW POS_COUR_GLI_L ; adresse d'écriture de BSF STATUS,RP1 BCF STATUS,RP0 MOVWF EEADR ; l'EEPROM BCF STATUS,RP1 MOVF POS_GLI_L,W ; donnée à écrire BSF STATUS,RP1 MOVWF EEDATA ; dans l'EEPROM BSF STATUS,RP1 BSF STATUS,RP0 CALL ECR_EEPROM ; RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 89 sur 115
10.10 Récupération des positions mémorisées ;************************************************************************ ;* Sous-programme RECUP_POS_MEM * ;************************************************************************ RECUP_POS_MEM BSF STATUS,RP1 BCF STATUS,RP0 ; récupération POS_GLI_MEM1_L MOVLW POS_GLI_MEM1_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP1_L ; récupération POS_GLI_MEM1_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_GLI_MEM1_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP1_H ; récupération POS_REHA_MEM1_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_REHA_MEM1_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_TEMP1_L
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 90 sur 115
; récupération POS_REHA_MEM1_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_REHA_MEM1_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_TEMP1_H ; récupération POS_SITE_MEM1_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_SITE_MEM1_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_TEMP1_L ; récupération POS_SITE_MEM1_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_SITE_MEM1_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_TEMP1_H
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 91 sur 115
; récupération POS_DOS_MEM1_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_DOS_MEM1_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_TEMP1_L ; récupération POS_DOS_MEM1_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_DOS_MEM1_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_TEMP1_H FIN_RECUP RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 92 sur 115
;************************************************************************ ;* Sous-programme RECUP_POS_MEM2 * ;************************************************************************ RECUP_POS_MEM2 BSF STATUS,RP1 BCF STATUS,RP0 ; récupération POS_GLI_MEM2_L MOVLW POS_GLI_MEM2_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP2_L ; récupération POS_GLI_MEM2_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_GLI_MEM2_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP2_H ; récupération POS_REHA_MEM2_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_REHA_MEM2_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_TEMP2_L
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 93 sur 115
; récupération POS_REHA_MEM2_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_REHA_MEM2_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_TEMP2_H ; récupération POS_SITE_MEM2_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_SITE_MEM2_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_TEMP2_L ; récupération POS_SITE_MEM2_H
BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_SITE_MEM2_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_TEMP2_H
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 94 sur 115
; récupération POS_DOS_MEM2_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_DOS_MEM2_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_TEMP2_L ; récupération POS_DOS_MEM2_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_DOS_MEM2_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_TEMP2_H FIN_RECUP2 RETURN
I R E I L L E R E N E T
Y C E E S L
M G
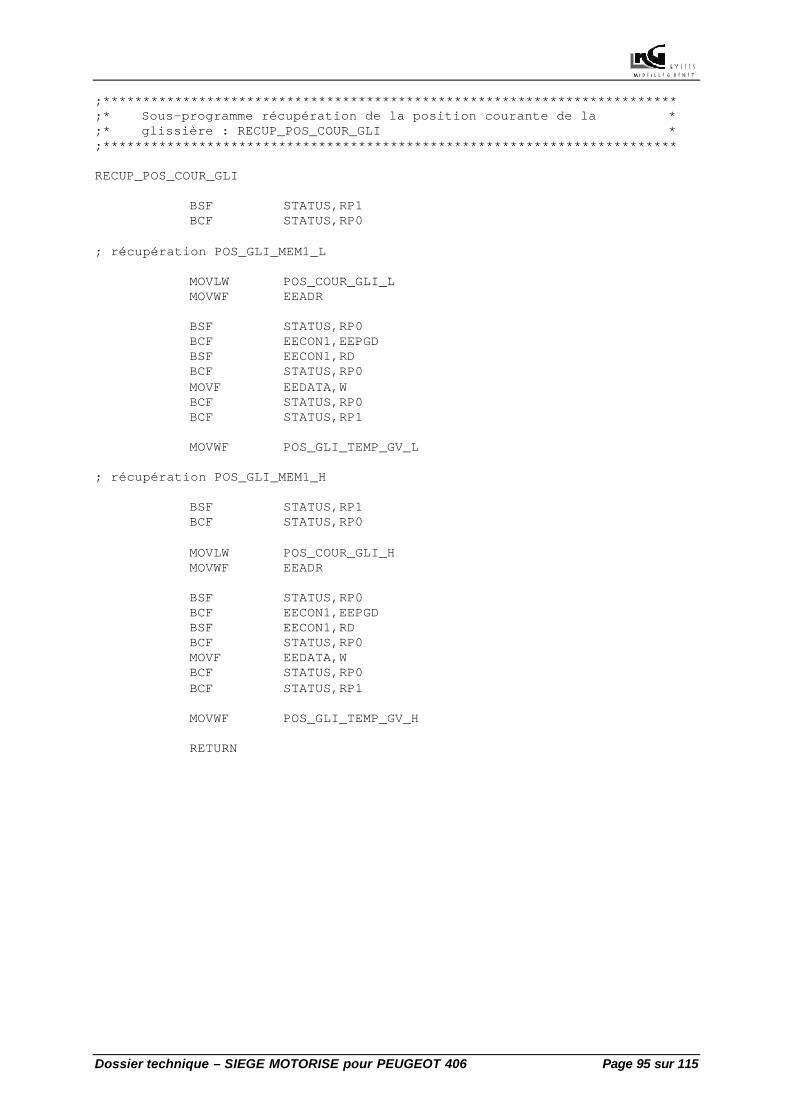
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 95 sur 115
;************************************************************************ ;* Sous-programme récupération de la position courante de la * ;* glissière : RECUP_POS_COUR_GLI * ;************************************************************************ RECUP_POS_COUR_GLI BSF STATUS,RP1 BCF STATUS,RP0 ; récupération POS_GLI_MEM1_L MOVLW POS_COUR_GLI_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP_GV_L ; récupération POS_GLI_MEM1_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_GLI_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_TEMP_GV_H RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 96 sur 115
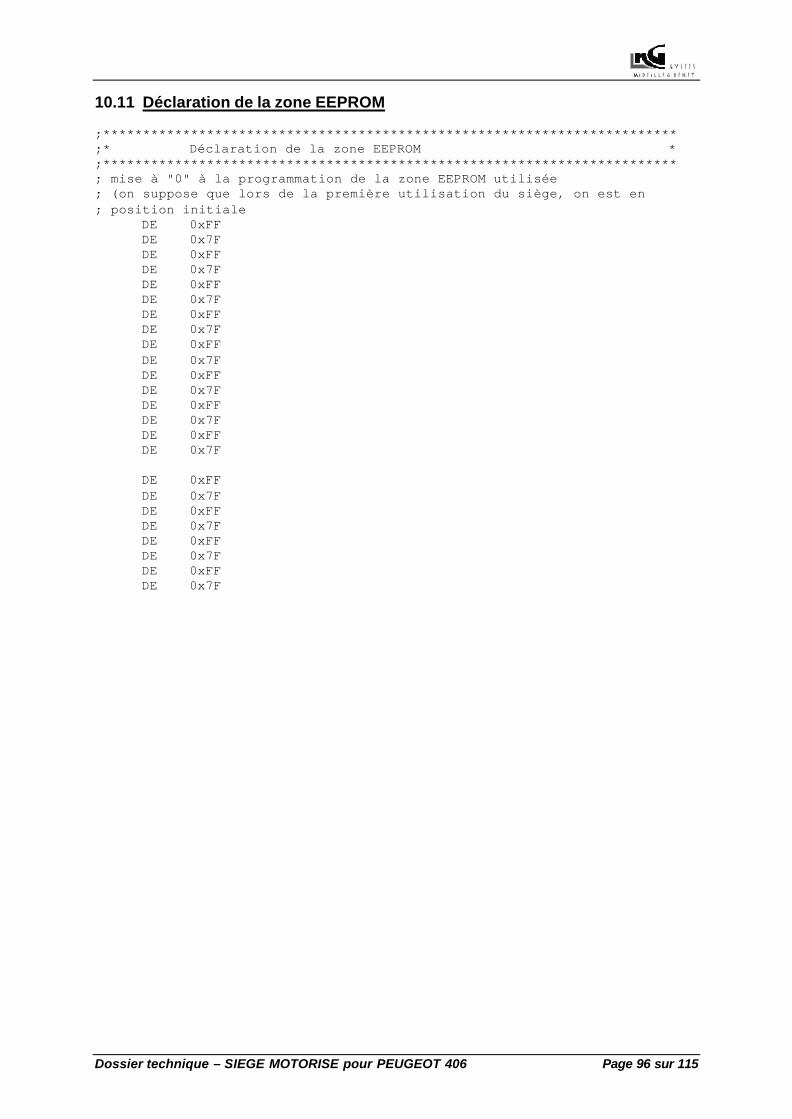
10.11 Déclaration de la zone EEPROM ;************************************************************************ ;* Déclaration de la zone EEPROM * ;************************************************************************ ; mise à "0" à la programmation de la zone EEPROM utilisée ; (on suppose que lors de la première utilisation du siège, on est en ; position initiale DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F DE 0xFF DE 0x7F
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 97 sur 115
10.12 Sous-programme écriture en EEPROM : ECR_EEPROM ;************************************************************************ ;* Sous-programme écriture dans l'EEPROM * ;************************************************************************ ECR_EEPROM BSF STATUS, RP0 BCF EECON1,EEPGD BSF EECON1,WREN BCF INTCON,GIE MOVLW 0x55 MOVWF EECON2 MOVLW 0xAA MOVWF EECON2 BSF EECON1,WR BSF INTCON,GIE WRITE BTFSC EECON1,WR GOTO WRITE BCF EECON1,WREN BCF STATUS, RP0 BCF STATUS, RP1 RETURN
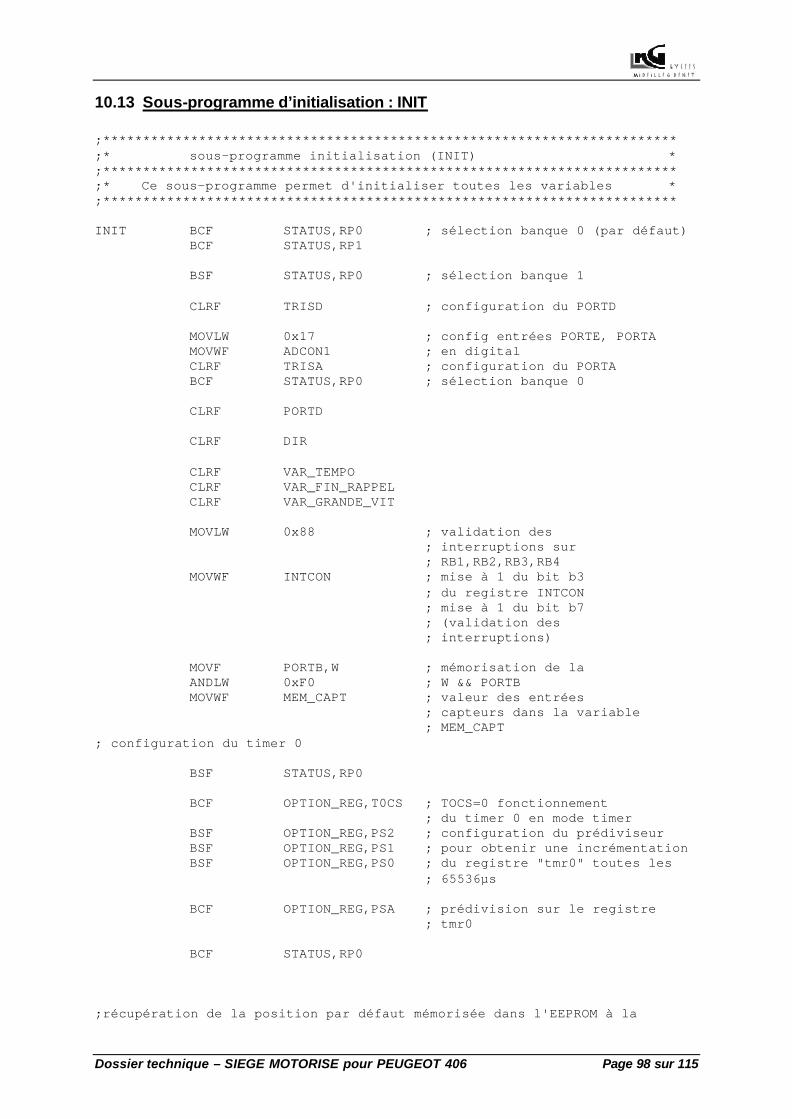
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 98 sur 115
10.13 Sous-programme d’initialisation : INIT ;************************************************************************ ;* sous-programme initialisation (INIT) * ;************************************************************************ ;* Ce sous-programme permet d'initialiser toutes les variables * ;************************************************************************ INIT BCF STATUS,RP0 ; sélection banque 0 (par défaut) BCF STATUS,RP1 BSF STATUS,RP0 ; sélection banque 1 CLRF TRISD ; configuration du PORTD MOVLW 0x17 ; config entrées PORTE, PORTA MOVWF ADCON1 ; en digital CLRF TRISA ; configuration du PORTA BCF STATUS,RP0 ; sélection banque 0 CLRF PORTD CLRF DIR CLRF VAR_TEMPO CLRF VAR_FIN_RAPPEL CLRF VAR_GRANDE_VIT MOVLW 0x88 ; validation des ; interruptions sur ; RB1,RB2,RB3,RB4 MOVWF INTCON ; mise à 1 du bit b3 ; du registre INTCON ; mise à 1 du bit b7 ; (validation des ; interruptions) MOVF PORTB,W ; mémorisation de la ANDLW 0xF0 ; W && PORTB MOVWF MEM_CAPT ; valeur des entrées ; capteurs dans la variable ; MEM_CAPT ; configuration du timer 0 BSF STATUS,RP0 BCF OPTION_REG,T0CS ; TOCS=0 fonctionnement ; du timer 0 en mode timer BSF OPTION_REG,PS2 ; configuration du prédiviseur BSF OPTION_REG,PS1 ; pour obtenir une incrémentation BSF OPTION_REG,PS0 ; du registre "tmr0" toutes les ; 65536µs BCF OPTION_REG,PSA ; prédivision sur le registre ; tmr0 BCF STATUS,RP0 ;récupération de la position par défaut mémorisée dans l'EEPROM à la
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 99 sur 115
; mise sous tension ; récupération POS_COUR_GLI_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_GLI_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_L ; récupération POS_COUR_GLI_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_GLI_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_GLI_H ; récupération POS_COUR_REHA_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_REHA_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_L
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 100 sur 115
; récupération POS_COUR_REHA_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_REHA_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_REHA_H ; récupération POS_COUR_SITE_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_SITE_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_L ; récupération POS_COUR_SITE_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_SITE_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_SITE_H
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 101 sur 115
; récupération POS_COUR_DOS_L BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_DOS_L MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_L ; récupération POS_COUR_DOS_H BSF STATUS,RP1 BCF STATUS,RP0 MOVLW POS_COUR_DOS_H MOVWF EEADR BSF STATUS,RP0 BCF EECON1,EEPGD BSF EECON1,RD BCF STATUS,RP0 MOVF EEDATA,W BCF STATUS,RP0 BCF STATUS,RP1 MOVWF POS_DOS_H RETURN
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 102 sur 115
10.14 Déclaration des variables ;************************************************************************ ;* Variables * ;************************************************************************ CBLOCK 0x030 ; début de la zone variables DIR:1 ; variable sens mouvement W_TEMP:1 ; variable temporaire de ; sauvegarde de W lors d'une ; interruption STATUS_TEMP:1 ; variable temporaire de ; sauvegarde de STATUS ; lors d'une interruption MEM_CAPT:1 ; variable permettant de connaître les ; valeurs des entrées capteurs ; précédentes CHANG_CAPT:1 ; variable permettant de connaître de ; quel capteur provient l'interruption POS_GLI_L:1 ;variable position glissière (octet de
; poids faible)
POS_GLI_H:1 ; variable position glissière (octet de ; poids fort)
POS_REHA_L:1 ; variable position rehausse (octet de
; poids faible)
POS_REHA_H:1 ; variable position rehausse (octet de ; poids fort)
POS_SITE_L:1 ; variable position site (octet de
; poids faible)
POS_SITE_H:1 ; variable position site (octet de ; poids fort)
POS_DOS_L:1 ; variable position dossier (octet de
; poids faible)
POS_DOS_H:1 ; variable position dossier (octet de ; poids fort)
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 103 sur 115
; déclarations des variables temporaires où seront stockées ; les positions mémorisées en EEPROM POS_GLI_TEMP1_L:1 POS_GLI_TEMP1_H:1 POS_REHA_TEMP1_L:1 POS_REHA_TEMP1_H:1 POS_SITE_TEMP1_L:1 POS_SITE_TEMP1_H:1 POS_DOS_TEMP1_L:1 POS_DOS_TEMP1_H:1 POS_GLI_TEMP2_L:1 POS_GLI_TEMP2_H:1 POS_REHA_TEMP2_L:1 POS_REHA_TEMP2_H:1 POS_SITE_TEMP2_L:1 POS_SITE_TEMP2_H:1 POS_DOS_TEMP2_L:1 POS_DOS_TEMP2_H:1 VAR_SON:1 VAR_FIN_RAPPEL:1 VAR_TEMPO:1 POS_GLI_PREC_L:1 POS_GLI_TEMP_GV_L:1 POS_GLI_TEMP_GV_H:1 VAR_GRANDE_VIT:1 ENDC
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 104 sur 115
10.15 Sous-programme Déclarations ;************************************************************************ ; Déclarations * ;************************************************************************ ; définitions des boutons poussoirs mémorisation(RB1), conduct1(RB2) et ; conduct2(RB3) #DEFINE BP_M PORTB,1 #DEFINE BP_CONDUCT1 PORTB,2 #DEFINE BP_CONDUCT2 PORTB,3 ; définition de l'image de la tension de clé de contact #DEFINE IMA_ACC PORTE,0 ; définition des capteurs de courses pour la gestion grande vitesse ; du dossier #DEFINE FC_AV PORTE,1 #DEFINE FC_AR PORTE,2 ; définition commande du buzzer #DEFINE COM_BUZ PORTA,1 ; définitions des variables permettant de connaître le sens de rotation ; des différents moteurs variable=1 : sens positif, ; variable=0 : sens négatif #DEFINE DIR_GLI DIR,0 ; b0 de la variable ; DIR est équivalent ; à la direction de la
; glissière #DEFINE DIR_REHA DIR,1 ; b1 de la variable ; DIR est équivalent ; à la direction de la
;rehausse #DEFINE DIR_SITE DIR,2 ; b2 de la variable ; DIR est équivalent ; à la direction du site #DEFINE DIR_DOS DIR,3 ; b3 de la variable ; DIR est équivalent ; à la direction du dossier ; définitions des boutons poussoirs de commande ; directe des différents mouvements du siège #DEFINE BP_GLI_AV PORTC,0 #DEFINE BP_GLI_AR PORTC,1 #DEFINE BP_REHA_MONT PORTC,2 #DEFINE BP_REHA_DESC PORTC,3 #DEFINE BP_SITE_MONT PORTC,4 #DEFINE BP_SITE_DESC PORTC,5 #DEFINE BP_DOS_AV PORTC,6 #DEFINE BP_DOS_AR PORTC,7
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 105 sur 115
; déclarations des adresses mémorisées dans l'EEPROM ; ces adresses sont virtuelles (l'adresse virtuelle 0x00 correspond ; à l'adresse réelle 0x2100 et ainsi de suite....) #DEFINE POS_GLI_MEM1_L 0x00 #DEFINE POS_GLI_MEM1_H 0x01 #DEFINE POS_REHA_MEM1_L 0x02 #DEFINE POS_REHA_MEM1_H 0x03 #DEFINE POS_SITE_MEM1_L 0x04 #DEFINE POS_SITE_MEM1_H 0x05 #DEFINE POS_DOS_MEM1_L 0x06 #DEFINE POS_DOS_MEM1_H 0x07 #DEFINE POS_GLI_MEM2_L 0x08 #DEFINE POS_GLI_MEM2_H 0x09 #DEFINE POS_REHA_MEM2_L 0x0A #DEFINE POS_REHA_MEM2_H 0x0B #DEFINE POS_SITE_MEM2_L 0x0C #DEFINE POS_SITE_MEM2_H 0x0D #DEFINE POS_DOS_MEM2_L 0x0E #DEFINE POS_DOS_MEM2_H 0x0F #DEFINE POS_COUR_GLI_L 0x10 #DEFINE POS_COUR_GLI_H 0x11 #DEFINE POS_COUR_REHA_L 0x12 #DEFINE POS_COUR_REHA_H 0x13 #DEFINE POS_COUR_SITE_L 0x14 #DEFINE POS_COUR_SITE_H 0x15 #DEFINE POS_COUR_DOS_L 0x16 #DEFINE POS_COUR_DOS_H 0x17 ; déclarations des commandes moteurs #DEFINE COM_GLI_AV PORTD,0 #DEFINE COM_GLI_AR PORTD,1 #DEFINE COM_REHA_MONT PORTD,2 #DEFINE COM_REHA_DESC PORTD,3 #DEFINE COM_SITE_MONT PORTD,4 #DEFINE COM_SITE_DESC PORTD,5 #DEFINE COM_DOS_AV PORTD,6 #DEFINE COM_DOS_AR PORTD,7 ; déclaration sélection grande vitesse #DEFINE GR_VIT PORTA,0 ; définition du bit indiquant la fin de mémorisation #DEFINE FIN_MEMO VAR_SON,0 ; définition du bit indiquant la fin du rappel ; de mémorisation #DEFINE FIN_RAPPEL VAR_SON,1
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 106 sur 115
;définition de la variable déplacement #DEFINE DEP_RAP1 VAR_DEP,0 #DEFINE DEP_RAP2 VAR_DEP,1 #DEFINE DEP_SITE_DOS_RAP1 VAR_DEP,2 #DEFINE DEP_SITE_DOS_RAP2 VAR_DEP,3 #DEFINE DEP VAR_DEP,4 ;définition des variables fin rappel #DEFINE FIN_GLI_RAP1 VAR_FIN_RAPPEL,0 #DEFINE FIN_REHA_RAP1 VAR_FIN_RAPPEL,1 #DEFINE FIN_SITE_RAP1 VAR_FIN_RAPPEL,2 #DEFINE FIN_DOS_RAP1 VAR_FIN_RAPPEL,3 #DEFINE FIN_GLI_RAP2 VAR_FIN_RAPPEL,4 #DEFINE FIN_REHA_RAP2 VAR_FIN_RAPPEL,5 #DEFINE FIN_SITE_RAP2 VAR_FIN_RAPPEL,6 #DEFINE FIN_DOS_RAP2 VAR_FIN_RAPPEL,7 ; définitions des variables utilisées dans le ; sous programme gestion de la grande vitesse : GV #DEFINE VAR_GV VAR_GRANDE_VIT,0 #DEFINE VAR_TMR0 VAR_GRANDE_VIT,1 #DEFINE VAR_MEM_POS_GLI VAR_GRANDE_VIT,2 #DEFINE VAR_FIN_GV_AV VAR_GRANDE_VIT,3 #DEFINE VAR_POS_GLI VAR_GRANDE_VIT,4 #DEFINE VAR_RECUP_POS_GLI VAR_GRANDE_VIT,5
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 107 sur 115
11. DOCUMENTS DE FABRICATION : 11.1 CARTE DE SORTIE : 11.1.1 Carte de sortie - schéma structurel :
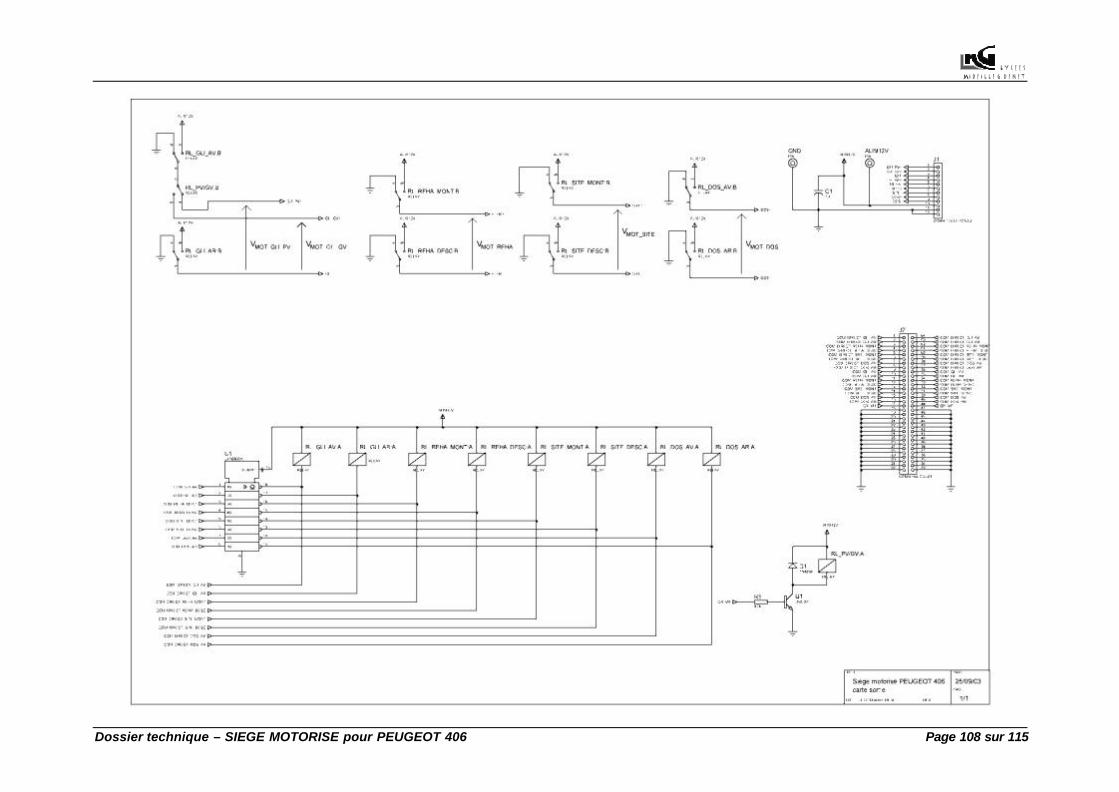
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 108 sur 115
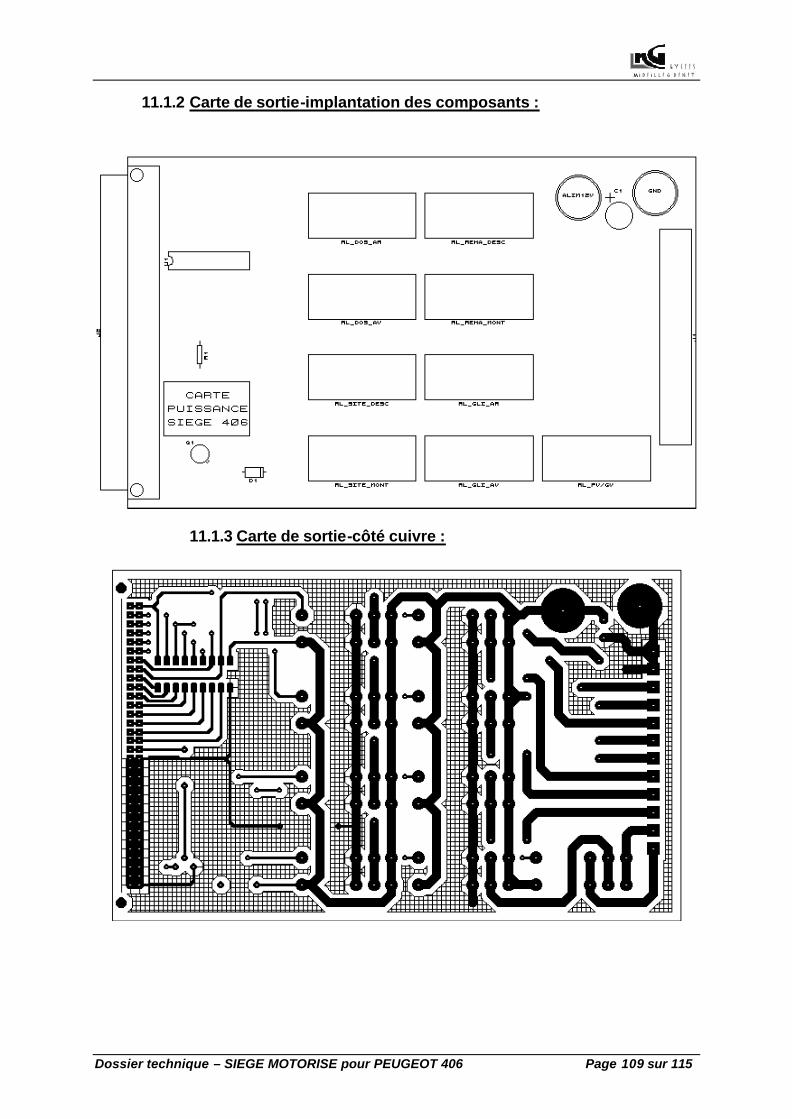
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 109 sur 115
11.1.2 Carte de sortie-implantation des composants :
11.1.3 Carte de sortie-côté cuivre :
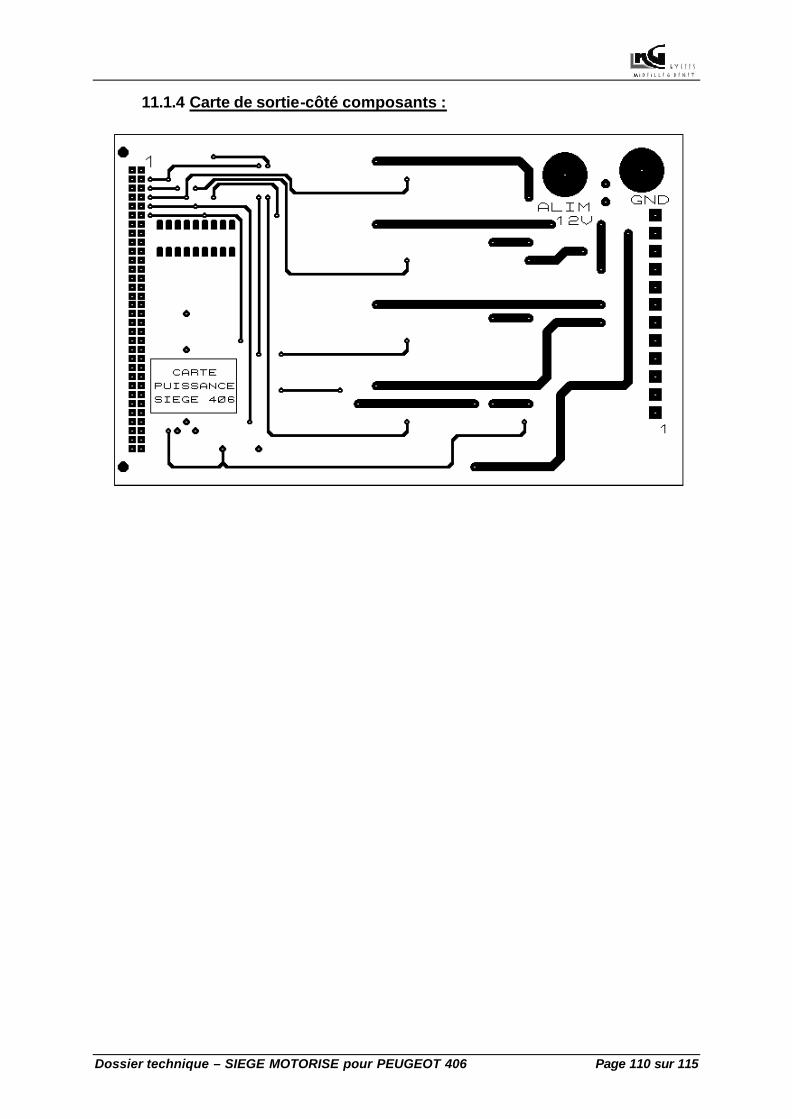
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 110 sur 115
11.1.4 Carte de sortie-côté composants :
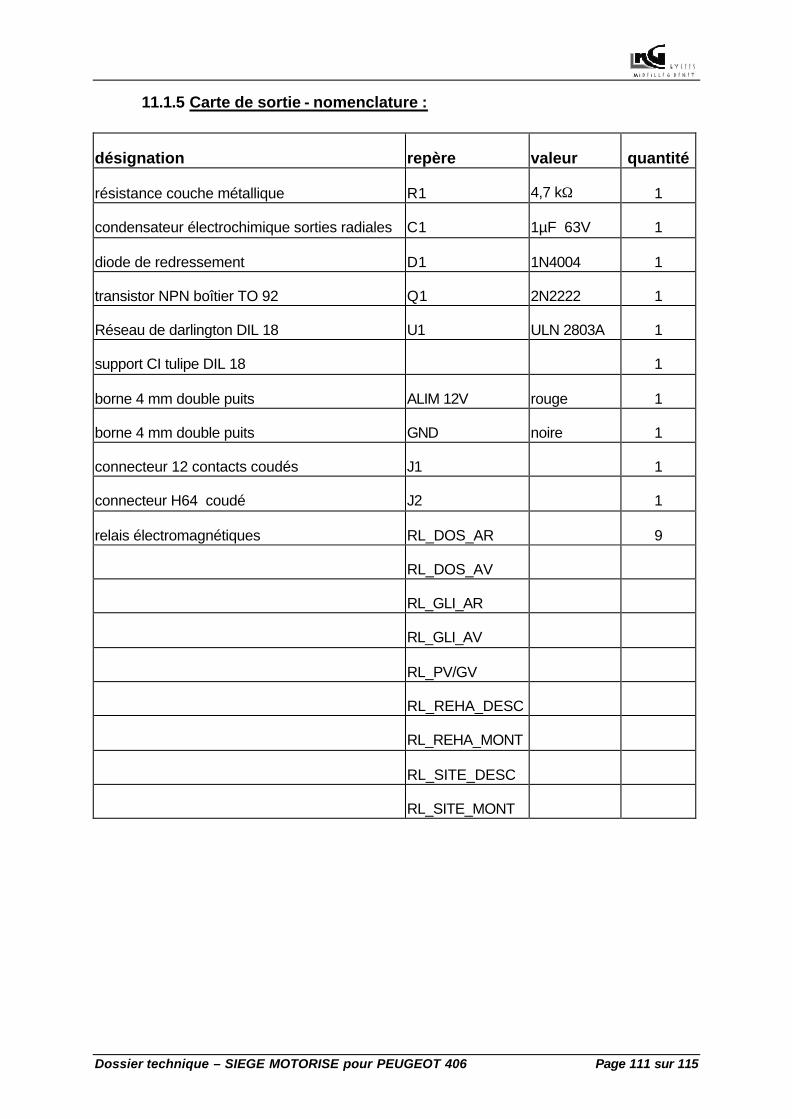
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 111 sur 115
11.1.5 Carte de sortie - nomenclature :
désignation repère valeur quantité
résistance couche métallique R1 4,7 kΩ 1
condensateur électrochimique sorties radiales C1 1µF 63V 1
diode de redressement D1 1N4004 1
transistor NPN boîtier TO 92 Q1 2N2222 1
Réseau de darlington DIL 18 U1 ULN 2803A 1
support CI tulipe DIL 18 1
borne 4 mm double puits ALIM 12V rouge 1
borne 4 mm double puits GND noire 1
connecteur 12 contacts coudés J1 1
connecteur H64 coudé J2 1
relais électromagnétiques RL_DOS_AR 9
RL_DOS_AV
RL_GLI_AR
RL_GLI_AV
RL_PV/GV
RL_REHA_DESC
RL_REHA_MONT
RL_SITE_DESC
RL_SITE_MONT
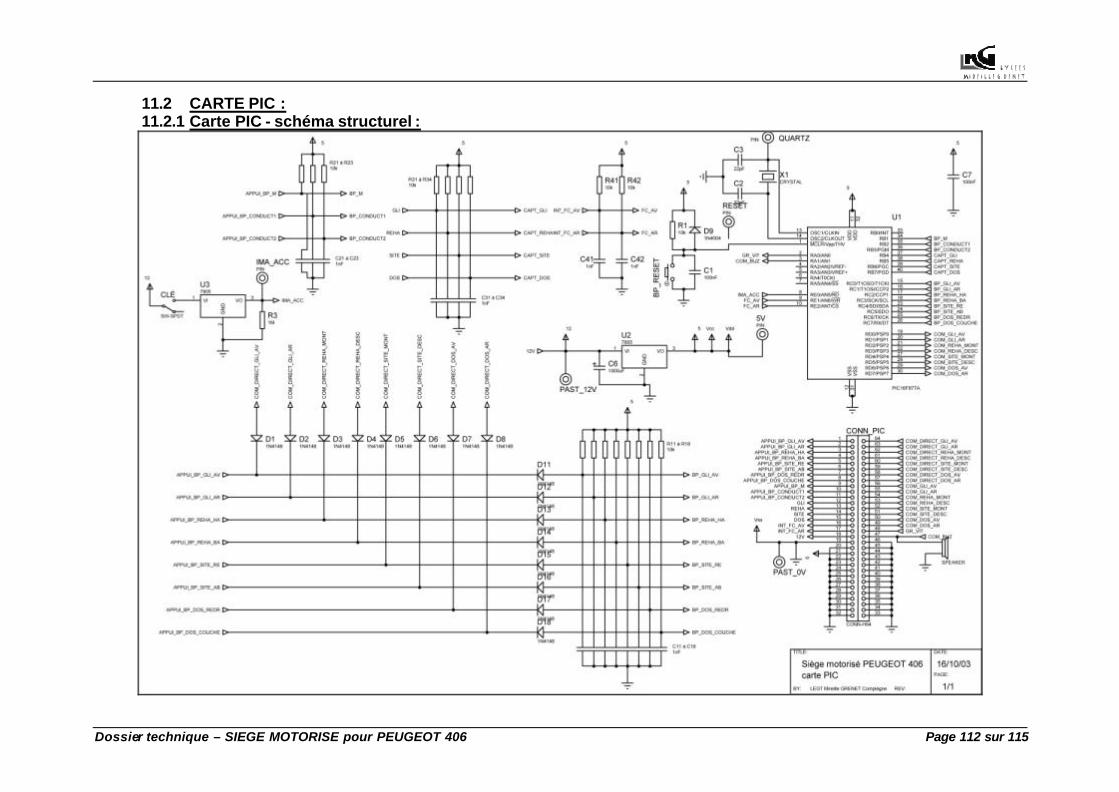
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 112 sur 115
11.2 CARTE PIC : 11.2.1 Carte PIC - schéma structurel :
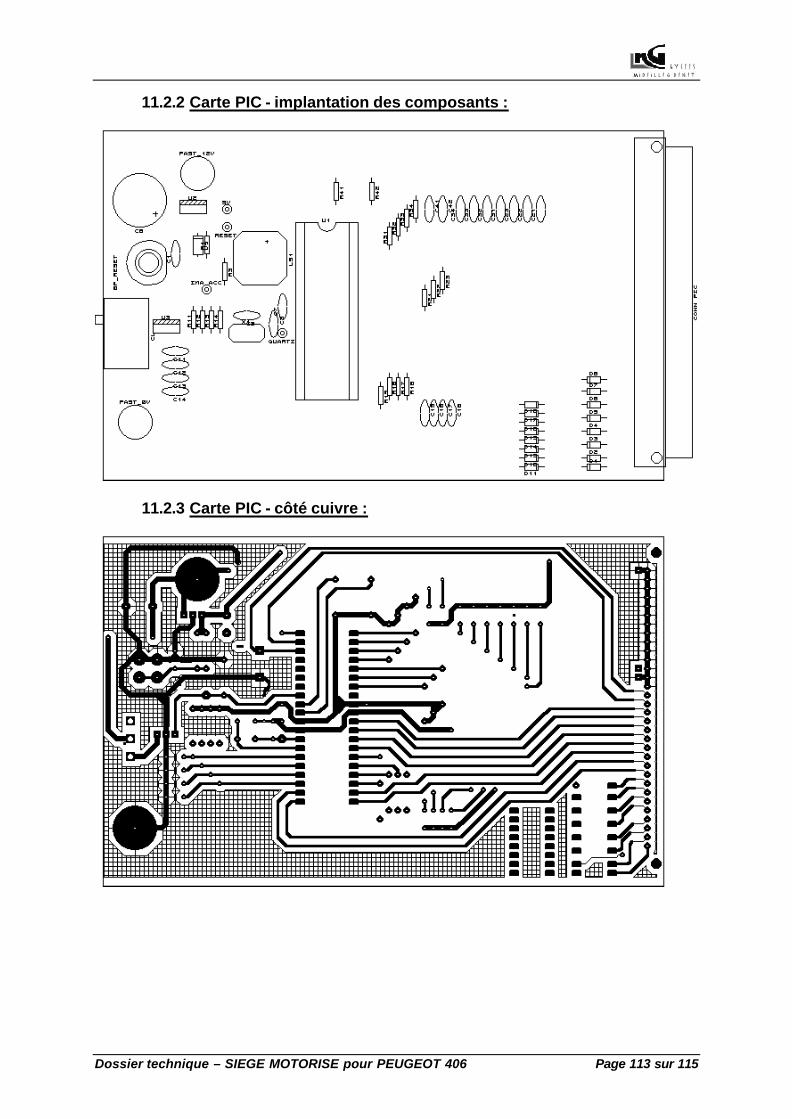
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 113 sur 115
11.2.2 Carte PIC - implantation des composants :
11.2.3 Carte PIC - côté cuivre :
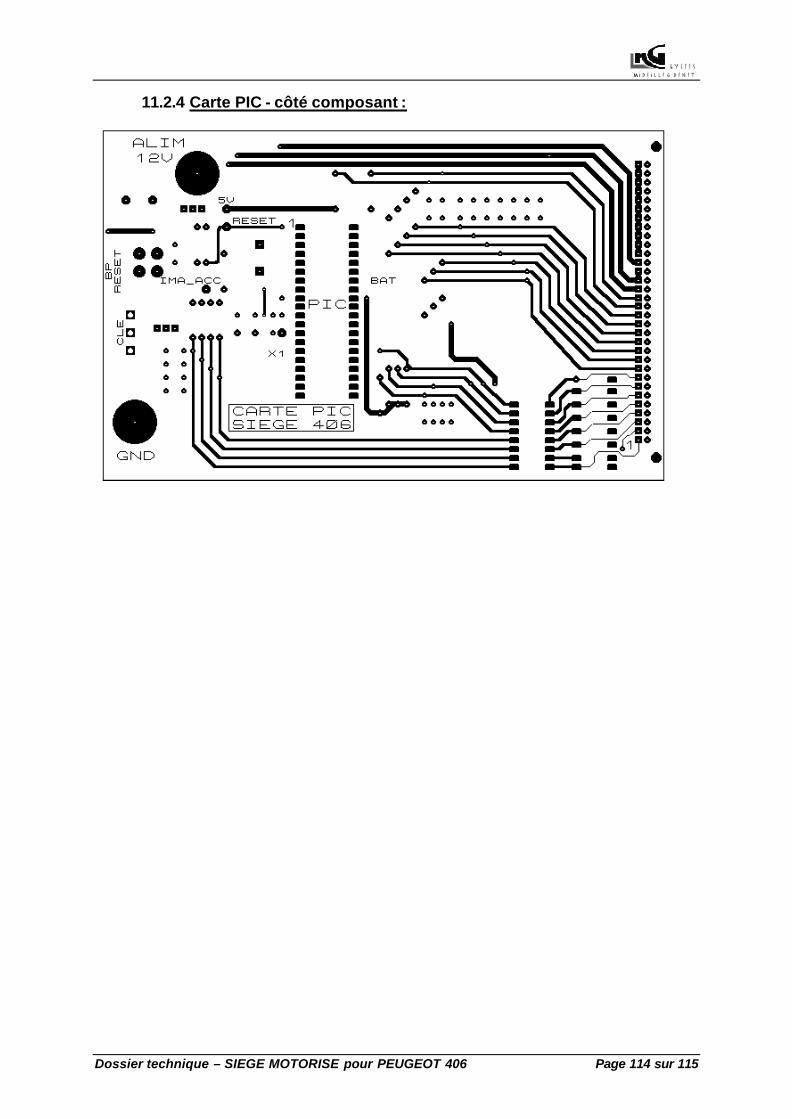
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 114 sur 115
11.2.4 Carte PIC - côté composant :
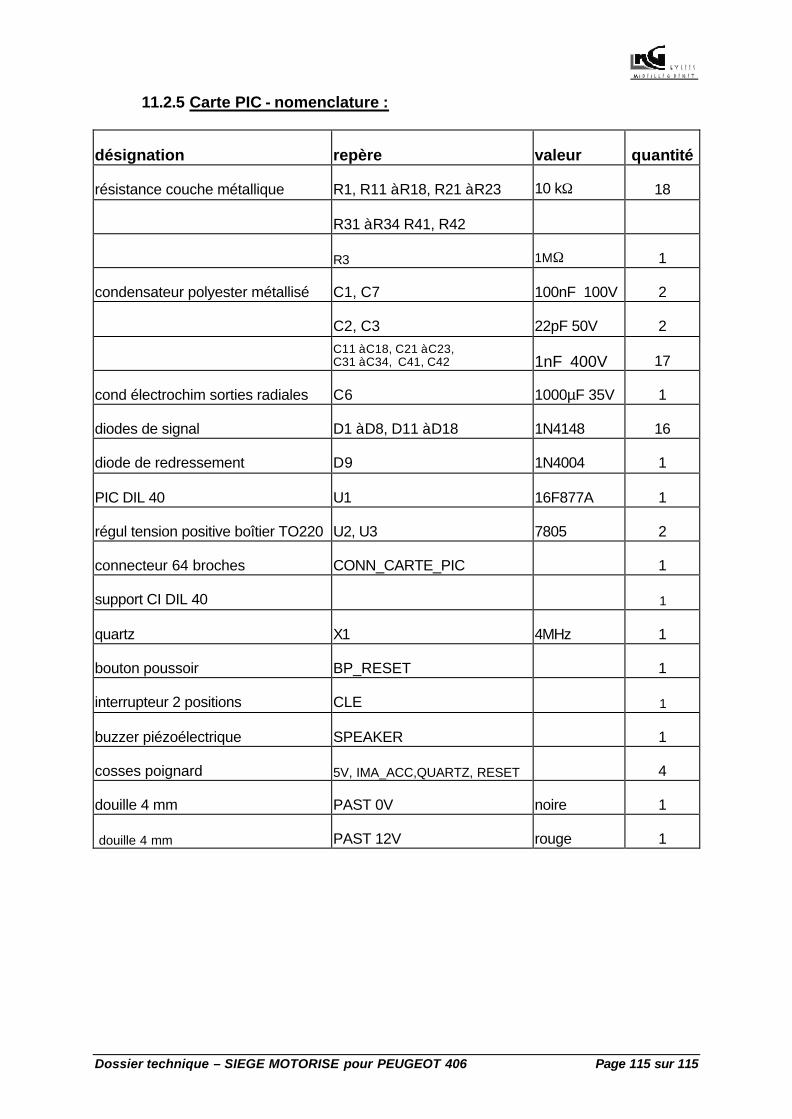
I R E I L L E R E N E T
Y C E E S L
M G
Dossier technique – SIEGE MOTORISE pour PEUGEOT 406 Page 115 sur 115
11.2.5 Carte PIC - nomenclature :
désignation repère valeur quantité
résistance couche métallique R1, R11 à R18, R21 à R23 10 kΩ 18
R31 à R34 R41, R42
R3 1MΩ 1
condensateur polyester métallisé C1, C7 100nF 100V 2
C2, C3 22pF 50V 2
C11 à C18, C21 à C23, C31 à C34, C41, C42 1nF 400V 17
cond électrochim sorties radiales C6 1000µF 35V 1
diodes de signal D1 à D8, D11 à D18 1N4148 16
diode de redressement D9 1N4004 1
PIC DIL 40 U1 16F877A 1
régul tension positive boîtier TO220 U2, U3 7805 2
connecteur 64 broches CONN_CARTE_PIC 1
support CI DIL 40 1
quartz X1 4MHz 1
bouton poussoir BP_RESET 1
interrupteur 2 positions CLE 1
buzzer piézoélectrique SPEAKER 1
cosses poignard 5V, IMA_ACC,QUARTZ, RESET 4
douille 4 mm PAST 0V noire 1
douille 4 mm PAST 12V rouge 1





























