Embed Size (px)
Citation preview

LYCEE CHAPTAL
TD 4
PTSI
Séquence 2
Comportement et Modélisation des
systèmes linéaires continus
invariants
CPGE
PTSI/PT*
Demie
classe
A3 - Conduire l'analyse B2 - Proposer un modèle B3 - Valider un modèle D1 - Découvrir le fonctionnement d’un système complexe D2 - Justifier et/ou proposer un protocole expérimental D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé G1 - Élaborer, rechercher et traiter des informations G2 - Mettre en œuvre une communication
2h
SLCI – 2ème ordre
Sciences Industrielles
pour l’Ingénieur
Figure : Quadricoptère équipé d’un système d’asservissement lui permettant une meilleure stabilité
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 2 sur 11
Exercice 1 : Identification
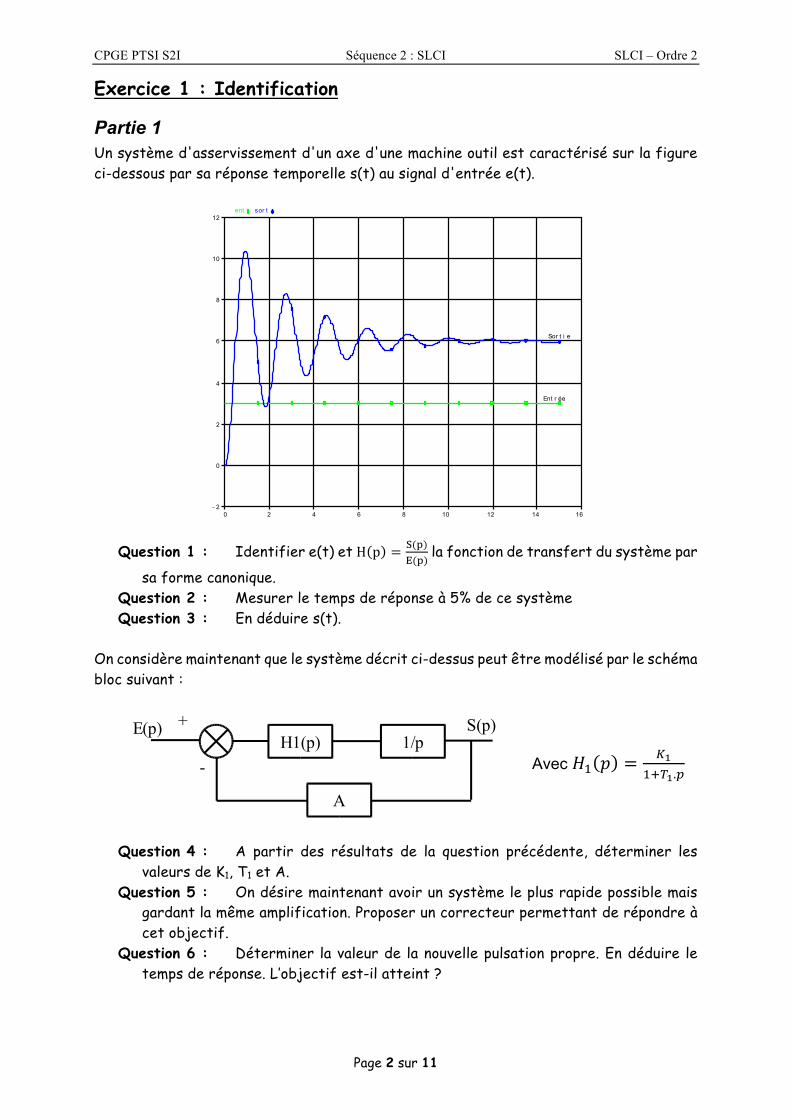
Partie 1 Un système d'asservissement d'un axe d'une machine outil est caractérisé sur la figure ci-dessous par sa réponse temporelle s(t) au signal d'entrée e(t).
Question 1 : Identifier e(t) et H p = $(&)((&)
la fonction de transfert du système par
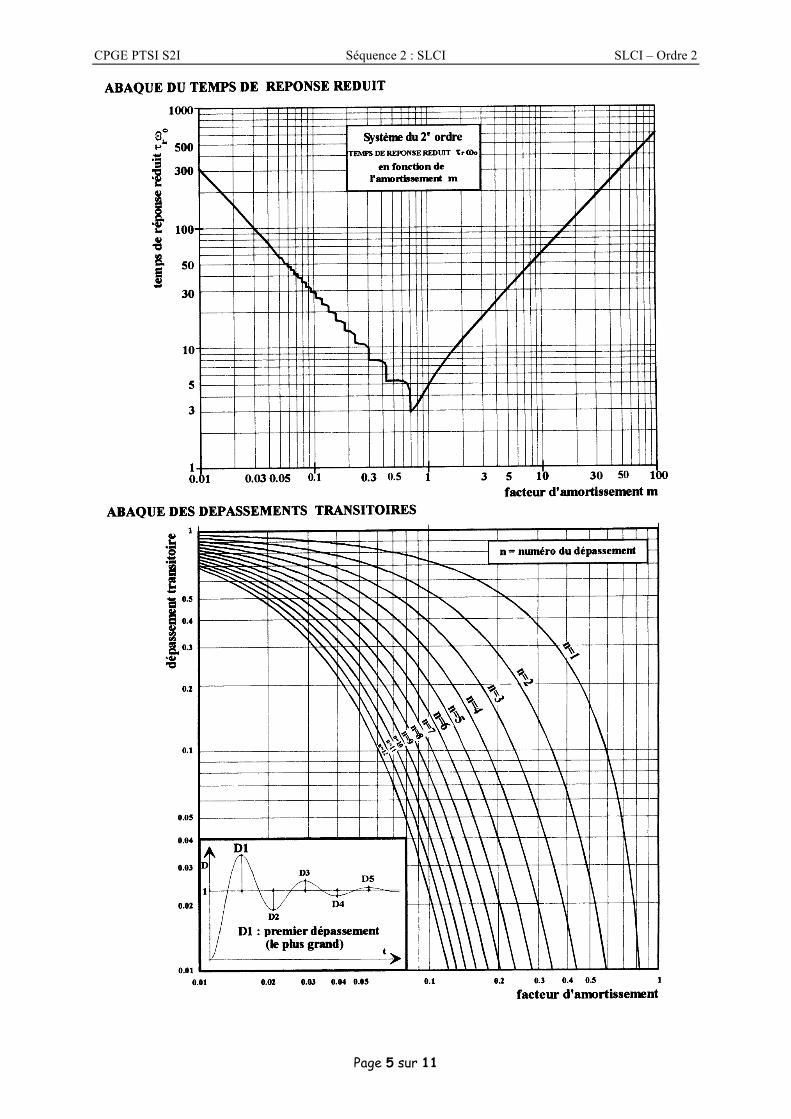
sa forme canonique. Question 2 : Mesurer le temps de réponse à 5% de ce système Question 3 : En déduire s(t).
On considère maintenant que le système décrit ci-dessus peut être modélisé par le schéma bloc suivant :
Avec 𝐻* 𝑝 = ,-*./-.1
Question 4 : A partir des résultats de la question précédente, déterminer les
valeurs de K1, T1 et A. Question 5 : On désire maintenant avoir un système le plus rapide possible mais
gardant la même amplification. Proposer un correcteur permettant de répondre à cet objectif.
Question 6 : Déterminer la valeur de la nouvelle pulsation propre. En déduire le temps de réponse. L’objectif est-il atteint ?
12/ 10/ 0508: 38: 43
AAAL. TMPAAAK. TMP
DI D' ACSYDE REPONSE TEMPORELLE
0 2 4 6 8 10 12 14 16- 2
0
2
4
6
8
10
12
TEMPS
ent sor t
Ent r ée
Sor t i e
1/p
A
H1(p)+
-
E(p) S(p)
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 3 sur 11
Partie 2 Soit le schéma bloc ci-dessous représentant un système asservi à retour unitaire dont l'entrée est E(p) et la sortie est S(p):
L'objet de l'exercice est la mesure des performances temporelles du système asservi. Les valeurs suivantes de H(p) sont envisagées:
H* p =4
2 + 0,1. petH; p =
42 + 0,2. p + 0,02. p;
Question 7 : En prenant Kv=1: calculer en prenant les deux valeurs ci-dessus pour
H(p), pour un échelon unitaire en entrée : - la précision relative - le temps de réponse à 5% - le dépassement éventuel
Question 8 : Déterminer la valeur de Kv minimale lorsque H(p) = H1(p) avec une erreur relative au plus égale de 10% et un temps de réponse à 5% au plus égal à 0,01s.
Question 9 : En prenant H(p) = H2(p), montrer que, quel que soit Kv, le système bouclé présente des dépassements.
Question 10 : Avec Kv=10, tracer l'allure de la réponse à l'échelon e(t)=20.u(t) du système bouclé en faisant apparaître les points particuliers de cette réponse.
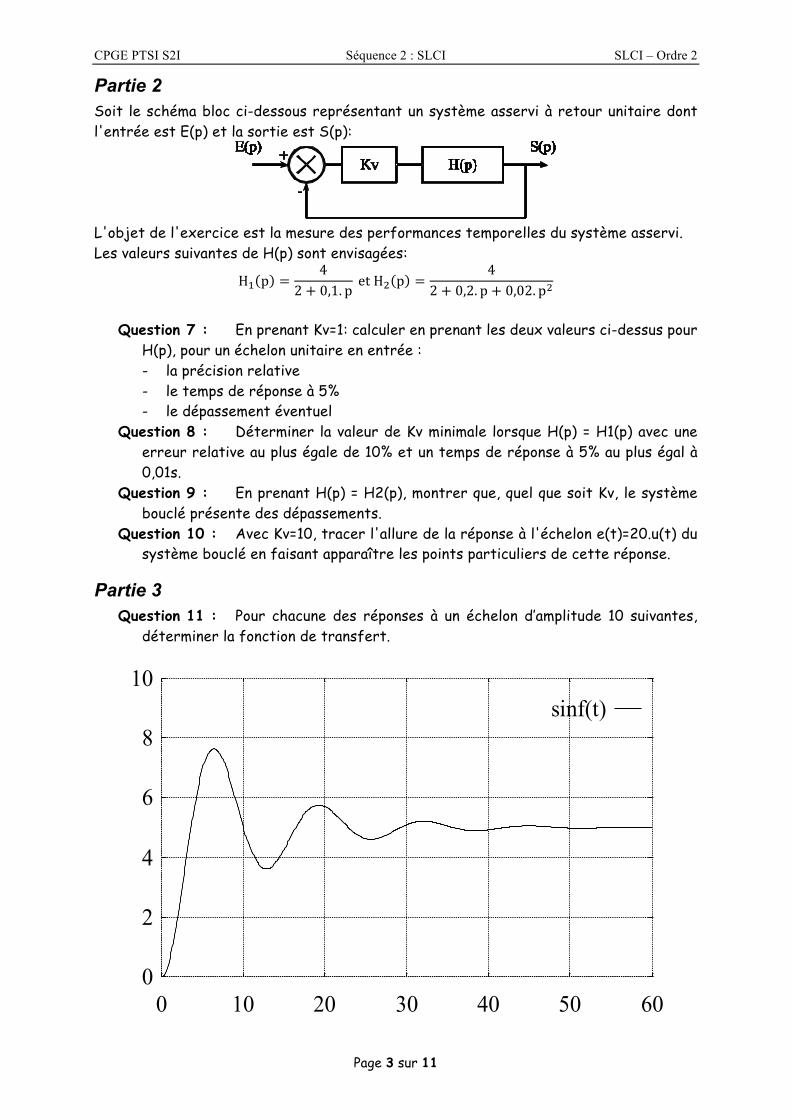
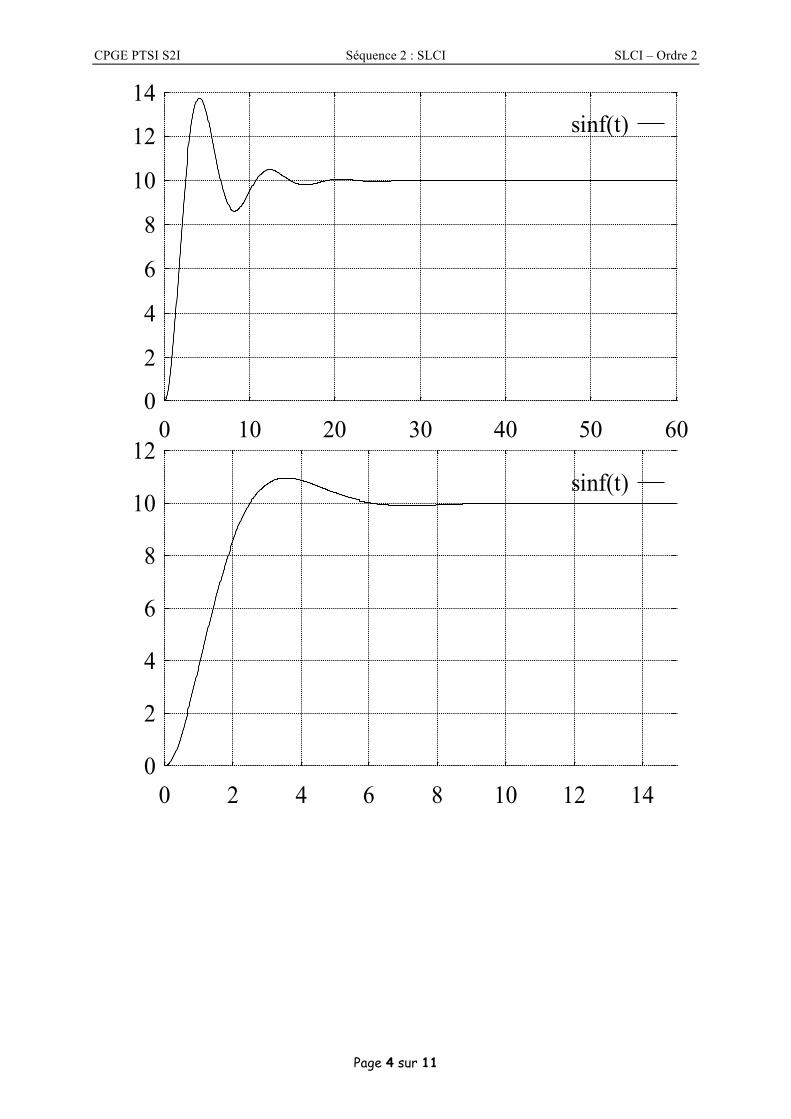
Partie 3 Question 11 : Pour chacune des réponses à un échelon d’amplitude 10 suivantes,
déterminer la fonction de transfert.
0
2
4
6
8
10
0 10 20 30 40 50 60
temps : t
sinf(t)
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 4 sur 11
0
2
4
6
8
10
12
14
0 10 20 30 40 50 60
temps : t
sinf(t)
0
2
4
6
8
10
12
0 2 4 6 8 10 12 14
temps : t
sinf(t)
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 5 sur 11
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 6 sur 11
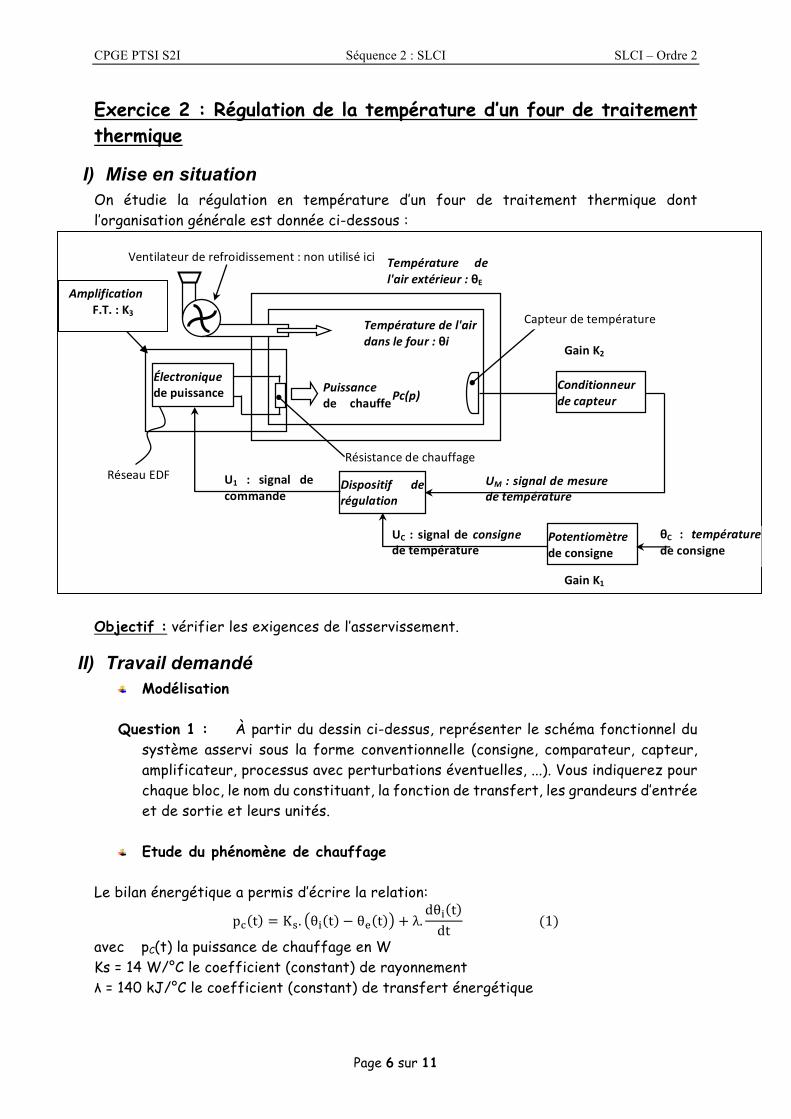
Exercice 2 : Régulation de la température d’un four de traitement thermique
I) Mise en situation On étudie la régulation en température d’un four de traitement thermique dont l’organisation générale est donnée ci-dessous :
Objectif : vérifier les exigences de l’asservissement.
II) Travail demandé Modélisation
Question 1 : À partir du dessin ci-dessus, représenter le schéma fonctionnel du
système asservi sous la forme conventionnelle (consigne, comparateur, capteur, amplificateur, processus avec perturbations éventuelles, ...). Vous indiquerez pour chaque bloc, le nom du constituant, la fonction de transfert, les grandeurs d’entrée et de sortie et leurs unités.
Etude du phénomène de chauffage
Le bilan énergétique a permis d’écrire la relation:
p< t = K>. θ@ t − θB t + λ.dθ@ tdt
(1)
avec pC(t) la puissance de chauffage en W Ks = 14 W/°C le coefficient (constant) de rayonnement λ = 140 kJ/°C le coefficient (constant) de transfert énergétique
Conditionneurdecapteur
Dispositif derégulation
Électroniquedepuissance Puissance
de chauffePcPC
Ventilateurderefroidissement:nonutiliséici Température del'airextérieur:θE
Températuredel'airdanslefour:θi
Résistancedechauffage
Capteurdetempérature
UM:signaldemesuredetempérature
U1 : signal decommande
UC : signaldeconsignedetempérature
RéseauEDF
Potentiomètredeconsigne
θC : températuredeconsigne
Pc(p)
GainK2
GainK1
AmplificationF.T.:K3
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 7 sur 11
On se propose d’étudier le phénomène de chauffage en hiver dans les conditions les plus défavorables rencontrées dans le lieu d’utilisation du four et correspondant à θi(0) = 0 °C.
Question 2 : Montrer que Θ@ p = **.F.&
α. P< p + ΘB p , avec α et T à calculer
littéralement. On se place dans le cas particulier où θe(t) = 0°C ∀ t.
Question 3 : Donner littéralement puis numériquement le gain statique du système de chauffage et la constante de temps de ce système de chauffage d’entrée la puissance pC(t) et de sortie la température θi(t).
À l’instant t = 0, la puissance PC(t) passe brutalement de la valeur nulle à la valeur PCO = 10 kW (ce qui n’est absolument pas physiquement cohérent, mais bien pratique pour l’étude qui suit) et est ensuite maintenue constante au cours du temps.
Question 4 : Définir le type et l’amplitude du signal d’entrée, la température finale atteinte θif et le temps de réponse à 5 %.
Question 5 : En utilisant les théorèmes des valeurs initiale et finale, représenter l’allure de la courbe d’évolution de θi(t) en indiquant précisément les valeurs remarquables.
Question 6 : Déterminer l’expression de θi(t).
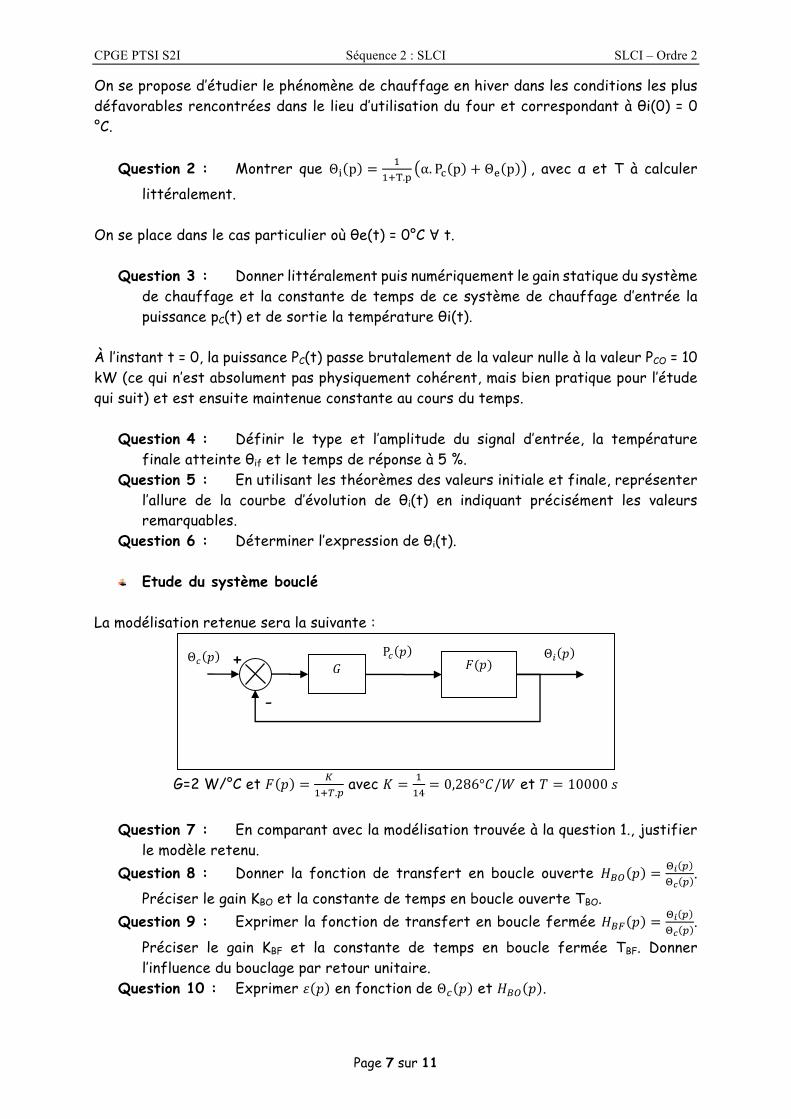
Etude du système bouclé La modélisation retenue sera la suivante :
G=2 W/°C et 𝐹 𝑝 = ,
*./.1 avec 𝐾 = *
*K= 0,286°𝐶/𝑊 et 𝑇 = 10000𝑠
Question 7 : En comparant avec la modélisation trouvée à la question 1., justifier
le modèle retenu. Question 8 : Donner la fonction de transfert en boucle ouverte 𝐻TU 𝑝 = VW 1
VX 1.
Préciser le gain KBO et la constante de temps en boucle ouverte TBO. Question 9 : Exprimer la fonction de transfert en boucle fermée 𝐻TY 𝑝 = VW 1
VX 1.
Préciser le gain KBF et la constante de temps en boucle fermée TBF. Donner l’influence du bouclage par retour unitaire.
Question 10 : Exprimer 𝜀 𝑝 en fonction de Θ[ 𝑝 et 𝐻TU 𝑝 .
𝐹(𝑝) +
- +
Θ[(𝑝) 𝐺
Θ](𝑝) P[(𝑝)
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 8 sur 11
Question 11 : Pour une entrée échelon 𝜃[ 𝑡 = 𝜃[`, calculer l’erreur statique pour le système non bouclé et pour le système bouclé. Exprimer l’erreur en pourcentage de l’entrée. Conclusions.
Question 12 : Pour le système bouclé et pour le système non bouclé, représenter 𝜃[ 𝑡 , 𝜃] 𝑡 sur un même graphe pour une entrée en échelon unitaire. Faire apparaître l’erreur statique.
Question 13 : Calculer le gain G qui permet d’annuler l’erreur statique pour le système non bouclé. Quelle est alors l’erreur statique en boucle fermée. Peut-on diminuer, voire annuler l’erreur statique pour le système bouclé ?
Étude du phénomène de refroidissement
III) Condition initiale : θi(0) = θif. IV) On suppose de plus que θe(t) = θE = constante ∀ t et θE < θif.
Question 14 : Montrer, à partir de la relation (1), que θi(p) peut s’écrire :
θ@(p) = F*(p). θ@b + F;(p). θ( + Fc(p). Pd(p) où F1(p) et F2(p) sont des fonctions dépendant de T et F3(p) est une fonction dépendant de T et α définis à la question 2.
V) On se propose maintenant d’étudier une panne intempestive de chauffage, ce qui
correspond à PC(p) = 0.
Question 15 : Calculer, en fonction des données θif et θE, les valeurs limites de la fonction θi(t) et de sa dérivée efW g
eg lorsque t → 0 et lorsque t → + ∞. Tracer l’allure
de θi(t). Question 16 : En utilisant le tableau des transformées de Laplace, déterminer
l’expression de θi(t). Question 17 : Calculer en fonction de T le temps mis par la température θi(t) pour
atteindre la température θE à 5 % près. AN : θE = 20°C et θif = 1000°C.
2ème consigne de chauffage
VI) À l’instant t = 0, on impose une loi de montée en puissance de telle façon que celle-ci
évolue linéairement de la valeur nulle à la valeur PCO = 20 kW en t1 = 1 heure (ce qui n’est pas si facile). Cette valeur est ensuite maintenue constante au cours du temps. On suppose à nouveau θ e(t) = 0°C ∀ t
Question 18 : Définir le type et l’amplitude des signaux d’entrée pour t ∈ [0 ; t1] puis pour t > t1.
Question 19 : En utilisant les théorèmes des valeurs initiale et finale, indiquer précisément les valeurs remarquables pour t ∈ [0 ; t1] puis pour t > t1.
Question 20 : En utilisant le tableau des transformées de Laplace, déterminer l’expression de θi(t) pour t ∈ [0 ; t1] puis pour t > t1. Représenter la courbe d’évolution de θi(t).
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 9 sur 11
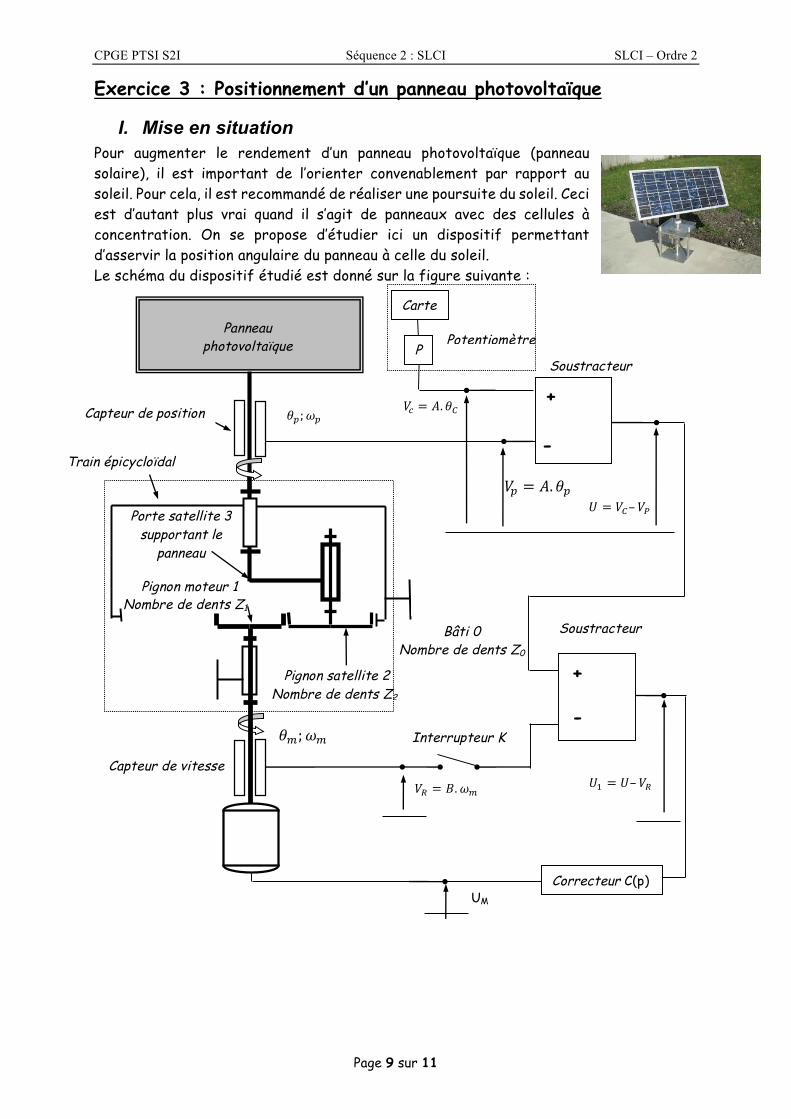
Exercice 3 : Positionnement d’un panneau photovoltaïque
I. Mise en situation Pour augmenter le rendement d’un panneau photovoltaïque (panneau solaire), il est important de l’orienter convenablement par rapport au soleil. Pour cela, il est recommandé de réaliser une poursuite du soleil. Ceci est d’autant plus vrai quand il s’agit de panneaux avec des cellules à concentration. On se propose d’étudier ici un dispositif permettant d’asservir la position angulaire du panneau à celle du soleil. Le schéma du dispositif étudié est donné sur la figure suivante :
Porte satellite 3 supportant le
panneau
Correcteur C(p)
Capteur de position
Train épicycloïdal
Panneau photovoltaïque P
Carte
Soustracteur
Soustracteur
Potentiomètre
𝑉[ = 𝐴. 𝜃j
Pignon moteur 1 Nombre de dents Z1
𝑈 = 𝑉j– 𝑉m
-
Bâti 0 Nombre de dents Z0
Pignon satellite 2 Nombre de dents Z2
Interrupteur K -
+
+
UM
𝑈* = 𝑈– 𝑉n 𝑉n = 𝐵. 𝜔q Capteur de vitesse
𝜃1; 𝜔1
𝑉1 = 𝐴. 𝜃1
𝜃q; 𝜔q
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 10 sur 11
Fonction de transfert du moteur : 𝑀 𝑝 = tu 1vu 1
=*
*.Fu.1 avec Tm=100s
Capteur de vitesse : Vn 𝑝 = 𝐵. Ωq 𝑝
Potentiomètre :Vj 𝑝 = 𝐴. θ[(𝑝) Capteur de position angulaire : V1 𝑝 = 𝐴. θ1(𝑝)
AN : 𝐴 = *`y𝑉. 𝑟𝑎𝑑}*
Correcteur : Uq 𝑝 = 𝐶(𝑝). U* 𝑝 On considèrera que C(p) = 1 On considère le train épicycloïdal constitué des pièces 0, 1, 2 et 3.
On peut montrer que : ��(g)�u(g)
= 0,1
Objectif : vérifier les exigences de l’asservissement en positon et en vitesse.
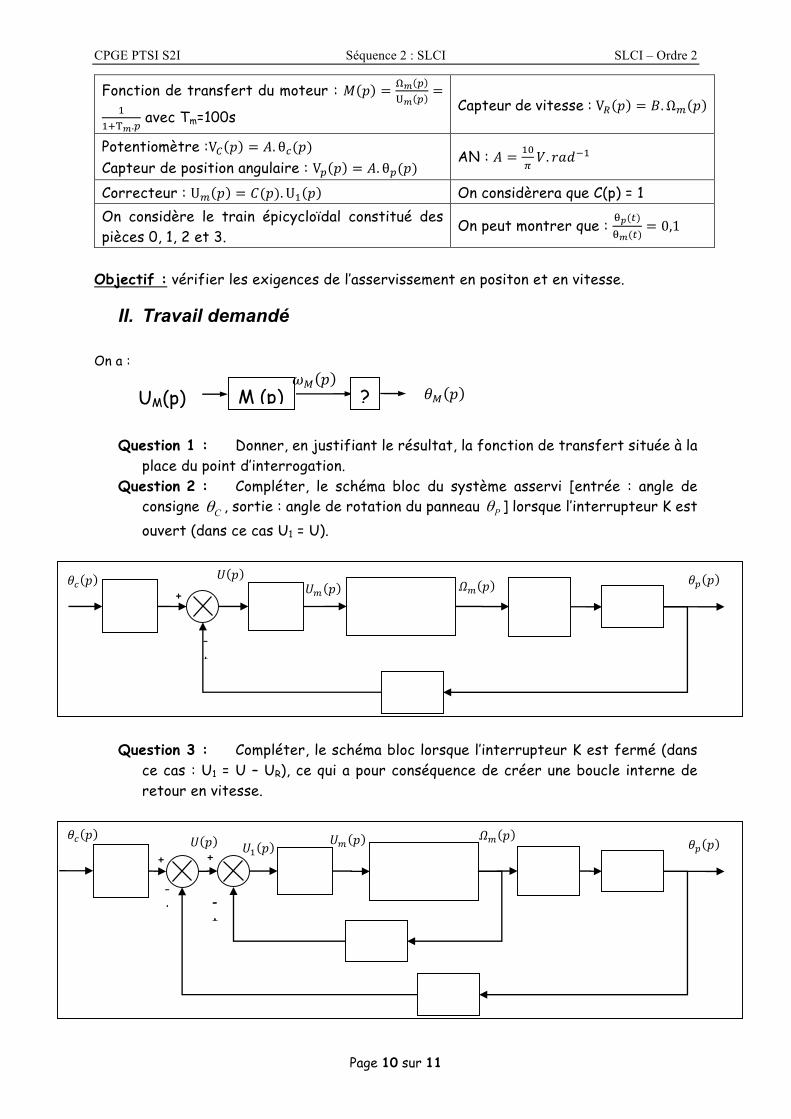
II. Travail demandé On a :
Question 1 : Donner, en justifiant le résultat, la fonction de transfert située à la
place du point d’interrogation. Question 2 : Compléter, le schéma bloc du système asservi [entrée : angle de
consigne Cθ , sortie : angle de rotation du panneau Pθ ] lorsque l’interrupteur K est ouvert (dans ce cas U1 = U).
Question 3 : Compléter, le schéma bloc lorsque l’interrupteur K est fermé (dans ce cas : U1 = U – UR), ce qui a pour conséquence de créer une boucle interne de retour en vitesse.
M (p) ? UM(p) 𝜃�(𝑝) 𝜔�(𝑝)
+
- +
𝜃1(𝑝)
𝜃[(𝑝)
𝑈q(𝑝) 𝛺q(𝑝)
𝑈(𝑝)
+
- +
𝜃1(𝑝)
𝜃[(𝑝)
𝑈q(𝑝) 𝛺q(𝑝)𝑈(𝑝) +
- +
- +
𝑈*(𝑝)
CPGE PTSI S2I Séquence 2 : SLCI SLCI – Ordre 2
Page 11 sur 11
Question 4 : On considère le système sans retour tachymétrique (interrupteur K
ouvert) : a. Déterminer la fonction de transfert 𝐻(𝑝) = �� 1
�X 1
b. Donner les valeurs de la pulsation propre ω0, du coefficient d’amortissement z et du gain statique K du système.
c. L’entrée est un échelon d’angle : θC(t) = θ0.u(t). Après avoir déterminé la valeur du premier dépassement D1% et la période des oscillations TP, tracer l’allure de la réponse indicielle de ce système. Donner le temps de réponse à 5 % en utilisant l’abaque du cours.
Question 5 : On considère le système avec retour tachymétrique (interrupteur K fermé) :
d. Déterminer la fonction de transfert 𝐻(𝑝) = �� 1�X 1
en fonction de B
e. Donner les expressions de la pulsation propre ω0, du coefficient d’amortissement z et du gain K en fonction de B.
f. Déterminer la valeur de B pour avoir le système le plus rapide. g. Donner alors les valeurs de la pulsation propre ω0 du système. h. L’entrée est un échelon d’angle : θC(t) = θ0.u(t). Tracer l’allure de la
réponse indicielle de ce système. Donner le temps de réponse à 5 % en utilisant l’abaque fourni.
Question 6 : Quelle a été l’influence du retour tachymétrique ?





























