Embed Size (px)
Citation preview

Systèmes d'exploitation Temps Réel

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 2
Plan du cours● fonctionnalités d'un système d'exploitation● fonctionnalités d'un système d'exploitation temps réel● exemples

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 3
système d'exploitation
● un programme qui permet à un utilisateur « ordinaire » d'accéder à toutes les fonctionnalités du processeur :
➢ à la CPU➢ à la mémoire➢ aux fichiers➢ aux périphériques ➢ au réseau➢ etc...
● cache la complexité des opérations● permet d'accéder à des ressources privilégiées sans avoir
besoin de droits spéciaux (et dangereux...)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 4
système d'exploitation
● suivant le contexte de leur utilisation, on trouve➢ les OS simple utilisateur
✔ par opposition aux OS multi-utilisateurs➢ les OS mono-tâches
✔ par opposition aux OS multi-tâches✘ préemptif✘ ou coopératifs
➢ les OS distribués✔ gérant les ressources de plusieurs machines reliées par un
réseau➢ les OS embarqués➢ les OS temps réels
● ils peuvent être➢ généralistes
✔ fonctionnant souvent en temps partagé➢ spécialisés
✔ développés pour un domaine restreint d'applications

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 5
exemples de systèmes d'exploitation
● OS généralistes➢ Windows➢ Linux (Fedora, Debian, Ubuntu, etc...)
● OS embarqués➢ uClinux➢ Windows CE
● OS temps réels➢ VxWorks➢ Linux + patch PREEMPT-RT➢ Xenomai
● OS spécialisés➢ Android➢ BlackberryOS➢ iOS➢ OSEK/VDX (automobile)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 6
systèmes d'exploitation temps réels
● un système d'exploitation avec des propriétés particulières liées à la nature des applications qu'il contribue à mettre en œuvre
➢ mécanismes « standards » pour la gestion des ressources (CPU , mémoire, etc...)
➢ mécanismes et outils spécifiques pour assurer✔ la prédictibilité du comportement ✔ le respect des échéances
✘ ordonnancement✘ gestion du temps avec une précision compatible avec l'échelle
de temps de l'application

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 7
services attendus d’un RTOS
● gestion des activités (threads)➢ création➢ suspension➢ destruction
● gestion du temps➢ horloges➢ timers
● communication et synchronisation➢ files de messages➢ mémoire partagée➢ sémaphores, mutexes, variables conditionnelles

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 8
services attendus d’un RTOS
● notifications asynchrones➢ signaux, événements
● gestion de la mémoire➢ mémoire virtuelle➢ verrouillage de la mémoire➢ protection de la mémoire
● entrées-sorties➢ open➢ read➢ write
directs ou asynchrones● gestion du réseau

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 9
la norme POSIX
● les services sont fournis par des fonctions spécifiques du système d'exploitation
● la norme POSIX propose une interface assurant la portabilité des applications
➢ Portable Operating System Interface➢ dans un environnement à la UNIX➢ développée par l'IEEE
● pour le temps réel ➢ POSIX1.b
✔ ordonnancement✔ signaux✔ timers, horloges✔ communication
➢ POSIX1.c✔ threads

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 10
architecture d'un RTOS
● dans la plupart des cas ➢ un noyau ou micro-noyau fournissant les fonctions de base➢ des couches logicielles fournissant les fonctions plus
élaborées
Matériel
gestion des tâches, IPC, temps, interrupts, etc...
interruptionsextérieures
appelssystèmes
exceptionshw/sw
interruptionshorloge
Espace utilisateur
Espace noyau

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 11
prise de contrôle par le noyauInterruptionsextérieures
exceptionshw/sw
appelssystèmes
interruptionsde l'horloge
Immediateinterruptservice
appel àl'ordonnanceur
Trap
switch
create_threadsuspend_threaddestroy_thread...create_timertimer_sleeptimer_notify...openread...etc...
retour d'exception
Services liésau temps et
ordonnanceur
Noyau

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 12
appels systèmes
● fonctions exécutées par le noyau au nom d'une tâche utilisateur
➢ permettent d'accéder de façon « sûre » à des ressources privilégiées
● implique un changement de contexte d'exécution➢ sauvegarde du contexte d'exécution de la tâche➢ passage de la CPU en mode privilégié (« noyau »)
● une fois la fonction terminée➢ le noyau exécute un « retour d'exception »➢ la CPU repasse en mode « normal »➢ l'ordonnanceur est appelé et la tâche de plus haute priorité
prend la CPU● dans beaucoup de processeurs embarqués
➢ pas de mode privilégié➢ l'appel système est traité comme une procédure ordinaire

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 13
services liés au temps
● l'ordonnancement des activités est au cœur du travail du noyau
➢ mis en œuvre périodiquement et dès qu'une tâche se termine
● l'activation périodique de l'ordonnanceur est provoquée par une horloge dédiée (pas celle de la CPU)
➢ génère une interruption à chaque tick (~ milliseconde)● à chaque interruption, le noyau
➢ gère tous les timers, en déclenchant éventuellement les actions liées aux timers qui viennent d'expirer
➢ gère les budgets de temps d'exécution des tâches ➢ met à jour la liste des tâches prêtes et invoque
l'ordonnanceur

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 14
interruptions extérieures
● le plus souvent dues à l'interaction avec du matériel➢ occurrences d'événements externes liés à des activités
sporadiques dues à des entrées/sorties✔ capteurs, interfaces réseaux, périphériques (disques)
➢ temps de réponse très variables● prise en charge par la CPU en passant par un mode
spécial « interruption »➢ niveaux de priorités dépendant de l'origine de l'interruption➢ désactivation de la prise en compte des interruptions➢ sauvegarde du contexte d'exécution et branchement à un
point spécial de l'OS➢ réactivation des interruptions et exécution d'une routine
dédiée (ISR)➢ reprise du cours normal d'exécution

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 15
interruptions extérieures
● si une interruption de priorité supérieure se produit pendant l'exécution de l'ISR, elle est prise en charge immédiatement par le système
➢ sinon, on attend la fin du traitement de l'interruption en courssystem shutdown priority
power down priorityclock interrupt priority
highest interrupt priority
lowest interrupt prioritydispatcher/scheduler priority
highest thread priority
lowest thread priority
other interrupt priorities
other interrupt priorities

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 16
interruptions extérieures
● en cas de partage de la même ligne d'interruptions (fréquent sur les systèmes embarqués)
➢ polling des dispositifs qui partagent la ligne✔ le dispositif responsable de l'interruption se signale à l'OS
➢ ou bien utilisation d'un vecteur d'interruption✔ le dispositif responsable passe à l'OS un « vecteur »
contenant l'adresse spécifique à laquelle se brancher
● le plus souvent l'ISR ne traite pas complètement l'interruption
➢ temps le plus court possible dans le mode interruption➢ réveil d'une tâche dédiée
✔ dans l'espace noyau ou utilisateur✔ ordonnancée

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 17
services liés au temps
● au moins une horloge présente dans les RTOS➢ à ne pas confondre avec l'horloge de la CPU➢ dans les systèmes POSIX : CLOCK_REALTIME
● pour chaque horloge➢ compteur➢ liste de timers➢ traitant d'interruption (handler) pour incrémenter le compteur
et voir quels timers ont expiré● résolution
➢ liée à la capacité à traiter les interruptions➢ de 10 ms à quelques centaines de µs➢ peut être très améliorée dans certaines architectures en
utilisant l'horloge de la CPU (Time Stamp Counter)● POSIX1.b : chaque thread/process peut avoir ses propres
horloges et timers, basés sur des temps absolus ou relatifs, synchrones ou asynchrones

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 18
services liés à l'ordonnancement
● implémentation d'algorithmes d'ordonnancement➢ algorithmes à priorités fixes
✔ SCHED_FIFO✔ SCHED_RR
➢ algorithme à priorités variables✔ EDF
➢ blocage de la préemption✔ le plus souvent par inhibition de l'ordonnanceur✔ pendant un temps le plus court possible
➢ gestion des serveurs de tâches apériodiques

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 19
communication et synchronisation
● fonctionnalités essentielles pour l'activité des tâches➢ communication
✔ échange d'informations de contrôle✔ échange d'informations de données
➢ synchronisation ✔ définir le moment et les conditions où ces échanges peuvent
avoir lieu

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 20
communication et synchronisation
● communication par files de messages➢ simple et efficace➢ possibilité de communiquer dans un environnement
distribué➢ possibilité de synchronisation par des mécanismes
d'écriture et de lecture bloquants➢ possibilité de notification asynchrone d'écriture dans une file
vide➢ possibilité de définir des niveaux de priorité des messages➢ possibilité d'implémenter un protocole d'héritage de priorité
● communication par mémoire partagée➢ très rapide➢ nécessite des moyens de synchronisation➢ possible de communiquer dans un environnement distribué
(projection de fichiers sur un disque)➢ complexe et très risqué !...

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 21
communication et synchronisation
● mécanismes de synchronisation➢ essentiels dans un environnement multithreadé
● plusieurs mécanismes➢ sémaphores➢ mutexes➢ variables conditionnelles➢ verrous lecteurs/écrivain
● peuvent permettre la mise en place des protocoles d'héritage de priorité ou de priorité plafonnée pour prendre en compte les problèmes d'inversion de priorité ou de deadlock

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 22
notification par événement
● nécessaire de notifier de façon asynchrone l'occurrence de faits importants
➢ expiration d'un timer➢ réception d'un message➢ terminaison d'une entrée-sortie asynchrone➢ etc...
● le plus souvent (POSIX) par le mécanisme de signaux➢ Asynchronous Procedure Calls sous Windows
● notification par un mécanisme analogue à celui des interruptions
➢ quand le thread est notifié par un signal ✔ il interrompt le cours de son exécution✔ le processeur passe en mode interruption✔ un traitant (handler) exécuté✔ le processeur repasse en mode normal et invoque
l'ordonnanceur

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 23
notification par événement
● la notification peut aussi s'effectuer de façon synchrone➢ le thread qui attend l'événement se bloque jusqu'à
l'occurrence du signal● limitations des signaux
➢ pas nombreux➢ pas de mise en queue➢ pas de déterminisme dans l'ordre de prise en compte➢ ne transportent pas d'information
● en partie résolu par les signaux temps réels de POSIX

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 24
les RTOS du marché
● il existe de nombreux systèmes d'exploitation ayant des propriétés conformes à la liste des fonctionnalités que nous venons de voir
● deux grandes catégories➢ OS généralistes
✔ VxWorks✔ Xenomai (Linux)✔ QNX✔ LynxOS
➢ OS spécialisés, développés dans le cadre d'un secteur d'activité déterminé (télécommunications, avionique, automobile, défense...)
✔ OSEK/VDX✔ iOS✔ Android
● ils peuvent être ouverts ou propriétaires

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 25
les RTOS du marché
● motivations pour des systèmes généralistes➢ la plupart des applications ont besoin de services
"généraux"✔ accès à des fichiers✔ accès au réseau
➢ souci de minimiser les phases de développement✔ minimiser les coûts✔ réutilisation de composants
➢ souci de portabilité des applications, indépendance vis-à-vis de la plate-forme d'exécution

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 26
les RTOS du marché
● motivations pour des systèmes spécialisés➢ performances
✔ adéquation au matériel utilisé➢ utilisations très spécifiques➢ marché captif
✔ automobile✔ avionique✔ télécoms
➢ quand le coût n'est pas un argument...

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 27
VxWorks
● RTOS propriétaire produit par Wind River (filiale de Intel)➢ le plus utilisé dans le monde de l'embarqué➢ rendu célèbre par la mission Pathfinder sur Mars➢ équipe la plupart des missions NASA (Curiosity)➢ dernière version : VxWorks 7 (février 2014)
● peu d'informations sur l'architecture de l'OS➢ non UNIX, mais interface conforme à POSIX➢ construit autour d'un micronoyau (WIND)➢ les applications, les protocoles de communication sont
complètement séparés du noyau✔ évolution du système plus facile et sûre
➢ accent mis sur la connectivité➢ supporte les architectures multiprocesseurs, symétriques et
asymétriques, aussi bien que monoprocesseur➢ supporte les architectures avec ou sans MMU

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 28
VxWorks
● faible empreinte mémoire➢ 20 kB pour le micronoyau➢ adaptable à la configuration utilisateur
● disponible sur de nombreuses architectures➢ ARM (9, 11)➢ Intel Pentium (2, 3, 4, M)➢ Intel XScale (IXP425, IXP465)➢ MIPS (4K, 5K, ...)➢ PowerPC ➢ SuperH (4, 4a)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 29
Linux
● Linux n'est pas un RTOS● points forts
➢ fiable➢ bon marché➢ performant➢ portable (conforme à POSIX)➢ ouvert aux autres systèmes
● points faibles➢ empreinte➢ opensource (licence GPL)
● il existe des solutions pour faire de Linux un RTOS :➢ adjonction d’un co-noyau temps réel➢ modifier Linux pour avoir un noyau entièrement préemptible

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 30
Linux
● approche « noyau entièrement préemptible »➢ modifier le noyau pour que les tâches non temps réel et
dont les temps d’exécutions ne sont pas connus n’interfèrent pas avec les tâches temps réel
➢ complexe (le noyau est gros)➢ mais seuls le cœur du noyau et quelques pilotes doivent
être modifiés (travail d’experts)➢ patch PREEMPT_RT
Real Time Linux Wiki (https://rt.wiki.kernel.org/)✔ prise en compte des interruptions par des threads noyaux✔ implémentation de l'héritage de priorité✔ remplacement des spinlocks par des mutex✔ mise en place de compteurs à haute précision pour exprimer
les délais et les échéances➢ approche généralement suffisante pour le temps réel mou
ou ferme

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 31
Linux
● approche « co-noyau »➢ solution « classique » (a existé même pour Windows : RTX)➢ impossible de faire confiance au noyau GPOS pour les
aspects temps réels ✔ délègue ceux-ci à un noyau spécialisé✔ le noyau Linux continue à servir les tâches classiques
➢ le noyau temps réel intercepte toutes les interruptions matérielles et les traite avant de les passer éventuellement au noyau Linux (PIC virtuel)
➢ Linux fonctionne avec une priorité inférieure à celle du noyau temps réel
➢ mais✔ nécessité de porter sur le noyau temps réel tous les pilotes
dont on attend une réponse temps réel✔ les appels aux fonctions de la glibc peuvent avoir des
latences importantes

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 32
Linux
➢ plusieurs approches✔ support pour l’exécution des tâches temps réel dans l’espace
utilisateur✘ Xenomai✘ RTAI
✔ tâches temps réel uniquement dans l’espace noyau (modules)
✘ RTLinux/GPL

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 33
Xenomai
● basé sur les spécifications ADEOS (Adaptive Domain Environment for Operating Systems) de Karim Yaghmour
● projet initialement créé pour faciliter le portage des applications temps réel vers un RTOS de type Linux (virtualisation)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 34
Xenomai
● abstraction des propriétés communes des RTOS traditionnels ➢ couche générique H/W (HAL) et S/W (SAL)➢ « peaux » pour émuler les RTOS traditionnels
I-PipeI-Pipe
SAL/HALSAL/HAL
couche générique temps réel(Xenomai core)
couche générique temps réel(Xenomai core)
interface appels systèmes Linuxinterface appels systèmes Linux
VxWorksVxWorks RTAIRTAI VRTXVRTX POSIXPOSIX ......
applications dans l’espace utilisateur
applications dansl’espace noyau
(pilotes)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 35
Xenomai
● « interrupt pipeline » pour organiser la distribution des interruptions de façon à ce que le noyau Linux ne retarde pas leur prise en compte par le RTOS
➢ implémentation de ADEOS➢ organise un ensemble de domaines connectés par le
pipeline✔ partagent le même espace d’adresses✔ implémentés sous forme de module
Interruptionset traps
Xenomai(primaire)
bouclier àinterruptions
Linux(secondaire)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 36
Xenomai
● deux types de threads peuvent coexister :➢ threads contrôlés par l'ordonnanceur du noyau Xenomai
(threads temps réels, ou threads Xenomai)✔ font appel à des fonctions spécifiques pour toutes les
opérations temps réel➢ threads contrôlés par Linux
● quand un thread Xenomai fait un appel système qui n'est pas pris en charge par le noyau Xenomai, il migre vers le domaine Linux, mais reste plus prioritaire que les threads non temps réels
● quand toutes les tâches temps réel ont été effectuées par Xenomai, le contrôle est redonné au noyau Linux

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 37
OSEK/VDX
● exécutif développé dans le cadre des applications embarquées pour le contrôle automobile (automotive)
➢ http://www.osek-vdx.org● Offene Systeme und deren Schnittstellen für die
Elektronik im Kraftfahrzeug (BMW, Bosch, DaimlerChrysler, Opel, Siemens, VW et l'Université of Karlsruhe)
➢ Open Systems and the Corresponding Interfaces for Automotive Electronics
➢ Systèmes Ouverts et les Interfaces Correspondantes pour l'Electronique Automobile
● Vehicle Distributed eXecutive (Renault)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 38
OSEK/VDX
● Consortium européen (franco-allemand) depuis 1995● pour les configurations mono processeur● avec des contraintes temps réel strictes● pour une grande variété d'applications, pour les phases
de mise au point aussi bien que pour la production (gestion des erreurs)
● indépendant du langage de programmation (syntaxe à la ANSI-C)
● portabilité et ré-utilisation du software

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 39
OSEK/VDX
● organisation du consortium (2011)
Comité de direction
Comité technique
Working GroupOperating System
Working Group Communication
Working GroupNetwork Manag.
Working GroupCertification
Groupe des UtilisateursGroupe des Utilisateurs
STEERING COMMITTEE, Accelerated Technology Inc.,ACTIA,AFT GmbH,Ashling,ATM Computer GmbH,Blaupunkt,Borg Instruments GmbH,C&C Electronics,Cambridge Consultants,Continental Teves,Cummins Engine Company,Delco Electronics,Denso,EDSEpsilon GmbH,
ETAS GmbH & Co KG,FIAT- Centro Ricerche,Ford (Europe),FZI, GM Europe GmbH,Greenhills,Grupo Antolin,Hella KG,Hewlett Packard France,Hitachi Micro Systems Europe Ltd.,Hitex, IBM Deutschland Entwicklung GmbH,Infineon,INRIA,Integrated Systems Inc.,
IRISA,LauterbachLucasVarity, MetrowerksMagneti Marelli,Mecel,Motorola,National Semiconductor,NEC Electronics GmbH,Noral,NRTA,Philips Car Systems,Porsche AG,Sagem Electronic Division,Softing GmbH,ST Microelectronics,
Stenkil Systems AB,Sysgo Real-Time Solutions GmbH,TECSI,Telelogic GmbH,TEMIC,Texas Instruments,Thomson-CSF Detexis,Trialog,UTA - United Technologies Automotive,Valeo Electronics,VDO Adolf Schindling GmbH,Vector Informatik,Visteon,Volvo Car Corporation,Wind River Systems,3Soft GmbH.
Adam Opel AG, BMW AG, Daimler AG, IIIT - Univ. Karlsruhe, GIE.RE. PSA, Renault, Robert Bosch GmbH, Continental Automotive GmbH, Volkswagen AG

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 40
OSEK/VDX
● exigences spécifiques dues au contexte de développement des applications automobiles
➢ l'OS est configuré et mis à l'échelle de façon statique (spécification statique du nombre de tâches, de ressources, de services)
➢ l'OS est capable de tourner à partir de mémoires ROM➢ l'OS fournit la portabilité des tâches applicatives➢ l'OS doit se comporter de façon prédictible et documentées
et se conformer aux exigences temps réel des applications automotives
➢ l'OS doit permettre l'implémentation de paramètres de performance prédictibles

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 41
OSEK/VDX
● architecture générale organisée autour des ECUs (Electronic Control Unit)
● 3 entités :➢ OSEK-OS (real time operating system) : environnement
d'exécution des ECUs➢ OSEK-COM (communication) : échange de données entre
et inter ECUs➢ OSEK-NM (network management) : configuration,
registration et monitoring des ECUs

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 42
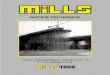
OSEK/VDX
Communication
Netw
or k Mana gem
en tApplication
Operating System
Interaction Layer (IL)
Transport Layer (TL)
Data Link Layer (DLL)
Data Link Layer (DLL)
Communication hardware
Réseau (CAN bus)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 43
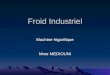
OSEK/VDX
● 3 niveaux d'exécution➢ interrupt➢ niveau logique (fonction-nement
de l'ordonnanceur)➢ niveau tâche
● les 3 niveaux vont en ordre décroissant de priorité
● les niveaux de priorité à l'intérieur d'un niveau d'exécution sont définis de façon statique
sans OS services
avec OS services
Niveaud'interruption
Niveau logique pour l'ordonnanceur
Niveaudes tâches
préemption : non/full/mixed
43
21
Tâches
attente : oui/non
Prioritéhaute
basse
Déroulementdu contexte

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 44
OSEK/VDX
● les services de l'OS gèrent les 3 niveaux d'exécution ainsi que
➢ l'administration des tâches➢ l'administration des événements (synchronisation des
tâches)➢ l'administration des ressources matérielles partagées➢ les compteurs et alarmes➢ la communication entre tâches par messages➢ le traitement des erreurs

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 45
OSEK/VDX
● développements récents➢ de plus en plus de technologies "assistées"
✔ freinage✔ direction
➢ beaucoup plus exigeantes en termes de déterminisme et de contraintes temporelles
➢ émergence de réseaux sécuritaires (TTP/C, TTCAN, Flexay)
➢ OSEKtime : OS temps réel qui peut gérer, en plus des tâches "classiques" d'OSEK, des tâches "Time Triggered" (TT)

F. Touchard Polytech Marselle Département MT Systèmes d'exploitation Temps Réel 46
Conclusions
● dans la conception des applications temps réels, la maîtrise de l'ordonnancement est primordiale
➢ partage de la CPU entre les différentes tâches constituant l'application
➢ gestion des dépendances entre les tâches (partage de ressources exclusives)
➢ gestion des situations de surcharges● en plus des fonctionnalités normales d'un système
d'exploitation classique, un système d'exploitation temps réel va permettre
➢ de mettre en place les algorithmes d'ordonnancement✔ priorités relatives des tâches
➢ de synchroniser les tâches✔ en particulier l'accès aux ressources partagées
➢ de communiquer et d'échanger des données entre les tâches