Embed Size (px)
Citation preview
opés par les fulgurants progrès de
la technologie, les appareils sans
fil investissent peu à peu le monde de la
production. Leur percée reste toutefois
timide: qui donc n’a pas utilisé une
liaison sans fil pour configurer un équi-
pement de terrain ou contrôler un
moteur ? Mais de là à résoudre le pro-
blème complexe d’un asservissement avec
des capteurs sans fil et sans batterie…
Le pari industriel du sans-fil
Ces dernières années ont été marquées
par l’explosion des technologies de trans-
mission sans fil. Les vastes marchés de
l’électronique nomade et du grand public
ont proposé des solutions de communi-
cation avancées, à des prix dérisoires. Les
télécommunications leur ont d’ailleurs
facilité la tâche avec des normes interna-
tionales et universelles, comme la 802.11,
Bluetooth, GSM, ZigBee…
Conscient que l’essor des technologies
modernes de l’information industrielle se
fonde sur le progrès des solutions
câblées et sans fil, ABB s’est intéressé de
près aux idées, aux techniques et aux
entreprises qui font les beaux jours de la
bureautique et des télécommunications.
Une démarche confortée par la société
d’étude de marché américaine ARC qui,
dès mai 2001, classait le sans-fil parmi
« les technologies clés des cinq années à
venir dans le secteur des automatismes. »
42 Revue ABB 4/2002
Technology review
Christoffer Apneseth, Dacfey Dzung, Snorre Kjesbu, Guntram Scheible, Wolfgang Zimmermann
De nos jours, il n’est pas de ligne de fabrication sans une armada de capteurs et d’actionneurs,
truffés d’écheveaux de câbles de puissance et d’échange de données dont l’installation n’est
pas seulement coûteuse mais aussi source fréquente de dysfonctionnements.
Pour y remédier, ABB propose un nouveau détecteur de proximité sans fil doté d’un module de
communication assurant l’alimentation, la transmission des signaux et le dialogue homme-
machine: bref, une installation sans fil à retordre!
D
«Le sans-fil est appelé à jouer, au cours des cinq prochaines années, un rôle majeur dans lemanufacturier. » ARC, mai 2001
Les détecteurs de proximité coupent le cordon
Sans fil!
Revue ABB 4/2002 43
Mais quels sont les atouts décisifs de
cette technologie pour l’industrie et que
peut-on en attendre?
Les vertus du sans-fil sont triples :
baisse des coûts (installation plus facile,
conception et développement simplifiés,
moins de matériels) ; gains de productivi-
té (mobilité, flexibilité et rapidité d’accès
aux réseaux) ; création de valeur (offre
de nouveaux services et applications
comme les postes clients et les terminaux
de conduite portables, les tableaux de
contrôle, le télédiagnostic…).
Ces bienfaits sont pleinement exploi-
tés par le nouveau détecteur de proximité
sans fil d’ABB.
Détecteurs de proximité sans fil
Les détecteurs de proximité inductifs sont
les capteurs de position les plus utilisés
en automatisation industrielle . Extrê-
mement fiables et sans contact, ils rensei-
gnent l’automate sur le mouvement de la
machine. Conçus pour détecter des cibles
métalliques, ils sont en général insensi-
bles aux ambiances poussiéreuses.
Ce qui pose toutefois problème, c’est
la connectique entre capteurs et com-
mande, à savoir les câbles multiconduc-
teurs fixes, équipés d’une prise ou d’un
1
Montage de boîtes de vitesses : l’une des nombreuses applications
industrielles multipliant les détecteurs de proximité
1
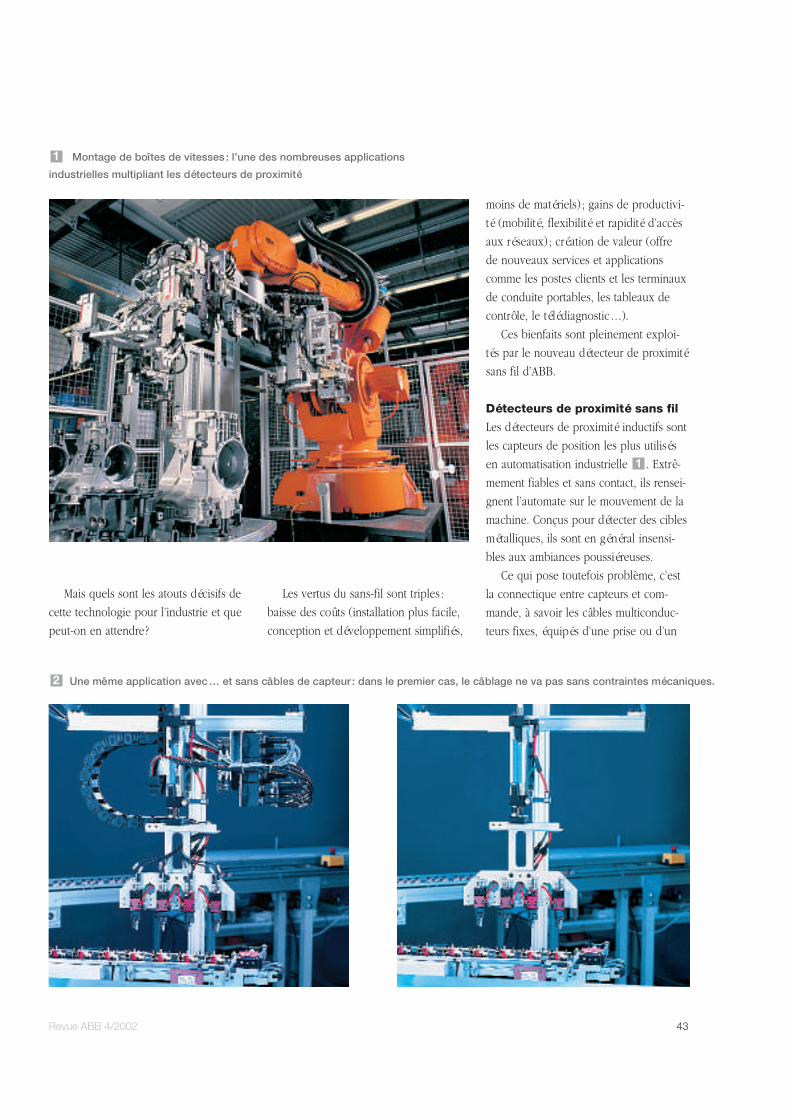
Une même application avec… et sans câbles de capteur : dans le premier cas, le câblage ne va pas sans contraintes mécaniques.2

44 Revue ABB 4/2002
Technology review
bornier. Si l’intégration du détecteur de
proximité inductif dans la machine s’avè-
re aujourd’hui relativement simple, la
conception et l’installation des câbles res-
tent assez laborieuses, surtout lorsqu’il
s’agit de suivre chaque mouvement de la
machine .
De nos jours, le concepteur de ma-
chine dispose de plusieurs solutions tech-
niques pour fiabiliser les connexions
électriques entre les constituants mobiles
de la machine. Cependant, la plupart
d’entre elles, comme les transmetteurs à
bague collectrice, ne conviennent qu’à
certaines applications précises. On leur
préfère couramment les gaines souples et
les câbles ultra flexibles.
Néanmoins, les câbles restent les
grands responsables des défauts capteurs
et des arrêts de production. L’idéal est
donc de s’en débarrasser ! [1]. C’est préci-
sément l’objectif des nouveaux détecteurs
de proximité sans fil d’ABB.
De l’idée à la réalisation:
un parcours épineux
Le problème soumis à un groupe de
chercheurs d’ABB en 1998 était aussi sim-
ple à définir que difficile à résoudre :
substituer au traditionnel détecteur de
proximité un appareil sans fil et sans
batterie. Un défi de taille ! Et pourtant, ce
qui semblait il y a quatre ans une «mis-
sion impossible » est bel et bien devenu
aujourd’hui réalité.
Nos chercheurs de Norvège, d’Allema-
gne et de Suisse ont décomposé ce pro-
blème en trois volets : le système de com-
munication sans fil, l’alimentation sans fil
et le capteur à faible consommation
d’énergie.
Premier défi : le système de communi-
cation sans fil doit être aussi fiable que la
solution filaire. Ces capteurs faisant partie
de systèmes de contrôle-commande en
boucle fermée, ils sont aussi soumis à des
contraintes temporelles strictes. Leur
technologie doit concilier économie et
faible consommation. Pour ajouter à la
difficulté, il leur faut coexister avec des
systèmes perturbateurs comme Bluetooth
et les réseaux locaux sans fil (WLAN), et
s’accommoder de tous les parasites
engendrés par le parc de capteurs sans fil
de l’usine (plusieurs milliers d’unités).
Voilà en clair la somme d’exigences
qu’aucun standard radio ne satisfait en-
core à ce jour.
L’alimentation sans fil posait un défi
tout aussi crucial, sinon pire. Si la techno-
logie des batteries a progressé tout au
long de cette dernière décennie, aucun
équipement n’est capable de fonctionner
sans la moindre maintenance pendant
au minimum dix ans, comme l’exige le
système. Parmi les solutions envisagées
(thermocouples, piles photovoltaïques,
piles à combustible…), la seule déclarée
viable a été le couplage inductif grâce
auquel un faible champ électrique généré
dans le volume d’une machine est
converti en énergie électrique utilisable
par les capteurs.
La troisième facette du problème visait
à développer une technologie de cap-
teurs offrant une consommation deux fois
moins élevée qu’à l’ordinaire.
Au cœur des solutions à tous les
aspects de cette problématique se situe
l’architecture globale du système, qui
constituera notre premier sujet d’intérêt.
L’architecture du système
Le système comporte quatre boucles
primaires (E) ceinturant la cellule de
fabrication. Elles sont alimentées en
courant alternatif par deux sources (D),
ce qui produit un champ magnétique
dans toute la cellule. Les détecteurs de
proximité sans fil (A) de la cellule intè-
grent des petites bobines qui captent
l’énergie de ce champ magnétique et le
convertissent en électricité. Ces capteurs
sont également munis de petits émet-
teurs-récepteurs radio et de composants
électroniques à faible consommation
qui assurent la transmission sans fil ; ils
communiquent avec un module d’entrée
(C) par le biais de deux antennes (B)
montées dans la cellule. Ce module se
comporte comme son homologue câblé.
Capable de gérer en même temps jusqu’à
60 détecteurs de proximité sans fil, il est
3
2
A
A
A
A
B
C
DD
E
Constituants type d’une cellule d’assemblage de moteurs : préhenseur de
robot bardé de détecteurs de proximité sans fil (A), boucles primaires (E), deux
alimentations (D), deux antennes (B) et module d’entrée (C)
3
Revue ABB 4/2002 45
raccordé au système de contrôle-com-
mande par une connexion universelle
FieldBusPlug d’ABB [2]. Cinq modules
d’entrée peuvent ainsi se partager une
même zone et desservir jusqu’à 300
capteurs équipant une seule cellule de
fabrication.
La convivialité fut le grand précepte
de toute la phase de développement ;
elle se concrétisa par l’élaboration de
consignes d’installation et de procédures
de configuration particulièrement sim-
ples. Résultat : pour installer le système,
inutile d’être un expert de la transmission
ou de l’alimentation sans fil ! Les capteurs
sont facilement configurés avec l’affi-
cheur à cristaux liquides et les touches
tactiles du module d’entrée. Conforme à
toutes les exigences du système câblé
classique, la voie du sans-fil offre nombre
d’avantages supplémentaires tels que le
diagnostic et l’auto-contrôle ; de plus, la
recherche de pannes et le remplacement
des capteurs sont bien plus faciles qu’en
technique traditionnelle.
L’alimentation sans fil :
plusieurs pistes
Si l’on juge acceptable de charger ou de
remplacer périodiquement les batteries
des produits grand public, il n’en va pas
de même dans l’industrie ; les capteurs
s’y comptent en effet par centaines, dans
des endroits inaccessibles ou sur des
machines fonctionnant 24 h/24. La solu-
tion ? Des capteurs autoalimentés [3] ou
une alimentation sans fil, associés à une
électronique très peu gourmande en
énergie.
En règle générale, l’énergie auxiliaire
peut être :
n intégrée au système: c’est le cas des
batteries, piles à combustible…,
n tirée de l’environnement du système:
lumière, chaleur, vibrations, manœuvre
de l’opérateur…,
n transmise au système par voie optique,
acoustique ou radio.
Néanmoins, la définition du problème
écarte d’emblée la première option,
tandis que la seconde manque cruelle-
ment de fiabilité et est totalement
inadaptée aux exigences strictes de
l’industrie en la matière. Enfin, il ressort
d’une étude approfondie sur les diverses
possibilités offertes par la troisième
approche que la seule solution viable
est celle basée sur le couplage magné-
tique.
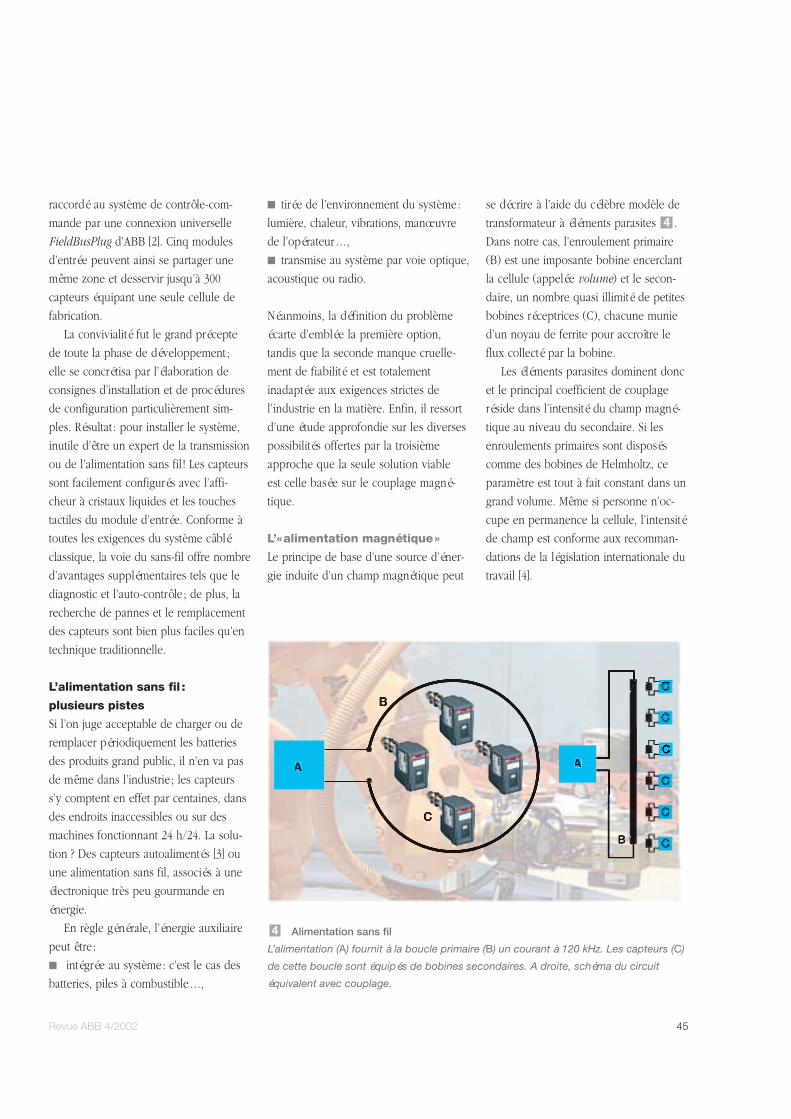
L’«alimentation magnétique»
Le principe de base d’une source d’éner-
gie induite d’un champ magnétique peut
se décrire à l’aide du célèbre modèle de
transformateur à éléments parasites .
Dans notre cas, l’enroulement primaire
(B) est une imposante bobine encerclant
la cellule (appelée volume) et le secon-
daire, un nombre quasi illimité de petites
bobines réceptrices (C), chacune munie
d’un noyau de ferrite pour accroître le
flux collecté par la bobine.
Les éléments parasites dominent donc
et le principal coefficient de couplage
réside dans l’intensité du champ magné-
tique au niveau du secondaire. Si les
enroulements primaires sont disposés
comme des bobines de Helmholtz, ce
paramètre est tout à fait constant dans un
grand volume. Même si personne n’oc-
cupe en permanence la cellule, l’intensité
de champ est conforme aux recomman-
dations de la législation internationale du
travail [4].
4
A
CCC
CCCA
Alimentation sans fil
L’alimentation (A) fournit à la boucle primaire (B) un courant à 120 kHz. Les capteurs (C)
de cette boucle sont équipés de bobines secondaires. A droite, schéma du circuit
équivalent avec couplage.
4

46 Revue ABB 4/2002
Technology review
Les pertes sont paradoxalement mini-
mes et principalement liées aux pertes
par conduction dans les enroulements
dues à l’effet de peau et aux courants de
Foucault.
Alimentation par résonance à
fréquence moyenne
Ce « transformateur » fonctionne mieux en
mode résonant dans lequel la forte induc-
tance (fuite) est compensée. Son exploi-
tation sous une tension ou un courant
faible est alors possible. Cette alimenta-
tion doit aussi pouvoir pallier deux types
de problèmes:
n modifications de l’environnement,
provoquées notamment par de gros
obstacles métalliques en mouvement
(robots),
n fortes dispersions de la «charge»
conduisant à des dimensionnements dif-
férents des bobines primaires (valeurs
d’inductance) et des pertes variables
(courants de Foucault dans les objets
métalliques avoisinants).
L’alimentation primaire nécessite donc un
système de contrôle-commande automa-
tique, rapide et extrêmement précis pour
maintenir à 120 kHz la fréquence de
résonance fixe.
Un récepteur omnidirectionnel
Pour gagner en puissance, côté récepteur,
les bobines doivent aussi fonctionner sur
un mode résonant. De plus, pour obtenir
une sortie de puissance constante quelle
que soit l’orientation par rapport au vec-
teur champ primaire, le choix d’ABB s’est
porté sur un agencement orthogonal de
trois bobines. Facilement réglable, cette
disposition est en effet bien adaptée à la
production de masse.
Champ magnétique tournant
Sachant qu’un champ unidirectionnel
pouvait être involontairement canalisé
par l’intrusion de pièces métalliques, on
opta pour un champ tournant.
Dans les conditions les plus défavora-
bles (intensité de champ minimale et
canalisée), les niveaux de puissance
atteints au secondaire dépendent princi-
palement de trois facteurs : taille de la
bobine, taille et forme du noyau magné-
tique. Dans pareil cas, les valeurs obte-
nues sur les premiers prototypes furent
de 1 mW/cm2 à 6 A/m. Des puissances
nettement plus élevées peuvent être four-
nies pour répondre aux besoins, par
exemple, des actionneurs industriels
(vannes, petits entraînements).
Cette alimentation doit convenir à des
cellules de fabrication type de 6×3×3 m2.
Modulaire, elle peut être étendue pour
desservir plusieurs cellules de ce genre.
La transmission sans fil
Le système de communication sans fil
transmet les signaux des capteurs au
module d’entrée. Comparable à la station
de base d’un réseau cellulaire, celui-ci
doit en outre se plier aux impératifs du
milieu industriel : offrir des temps de
réponse très courts (généralement bien
inférieurs à 10–15 ms), piloter un grand
nombre de capteurs dans une cellule de
plusieurs mètres de rayon, garantir l’inté-
grité de la transmission d’un grand nom-
bre de données même lorsque la trans-
mission radio est entravée par des obsta-
cles et des interférences .
Or aucun des systèmes existants pas-
sés au crible de notre étude ne répondait
5
Transmission sans fil
Chaque module d’entrée collecte les données des capteurs de «sa» zone qu’il
rapatrie vers l’automate (PLC) sur un bus de terrain (FB).
5

Revue ABB 4/2002 47
à ces besoins ; les systèmes d’étiquetage
électronique utilisés dans les grandes sur-
faces, par exemple, péchaient par leur
portée limitée et leur manque de souples-
se ; de même, les réseaux locaux ou les
liaisons radio courte distance, dont Blue-
tooth [5], ne résistaient pas à la contrainte
de traiter une multitude de capteurs.
D’où la décision de concevoir un nou-
veau système capable de coller aux exi-
gences du capteur sans fil tout en réutili-
sant un maximum de composants stan-
dard et économiques du marché.
Ce système exploite la bande de fré-
quences ISM (industrielle, scientifique et
médicale) des 2,4 GHz. Le module
d’entrée d’ABB concentre toute la com-
plexité et la sophistication du système,
simplifiant d’autant le capteur. Un seul de
ces modules peut gérer jusqu’à 60 cap-
teurs sans fil. Semblable à bien des
égards à une station de base WLAN, il
s’en distingue par plusieurs caractéris-
tiques qui font sa spécificité :
n Emission et réception simultanées des
signaux radio ; rappelons au passage que
le duplex intégral ou full duplex est
impossible sur Bluetooth et les WLAN.
n Réception simultanée des signaux les
plus forts et les plus faibles, la différence
de puissance entre ces deux extrêmes
pouvant varier de un à un million !
n Suppression des parasites : il est possi-
ble de recevoir un message ou un signal
capteur extrêmement faible, même en
présence d’un important signal parasite
émis à une fréquence voisine.
n Possibilité de commuter périodique-
ment les antennes émettrices et réceptri-
ces des modules d’entrée pour multiplier
les chemins de propagation: une excel-
lente parade aux phénomènes d’affaiblis-
sement et aux effets d’écran.
Le matériel de transmission du capteur
s’appuie sur un émetteur-récepteur radio
Bluetooth classique, ce qui se traduit par
des économies d’échelle, une miniaturisa-
tion des composants et une faible
consommation. Plus précisément, le
choix de l’antenne située sur l’émet-
teur-récepteur du capteur mérite une
attention particulière : son rayonnement
doit être omnidirectionnel pour garantir
une transmission uniforme quelle que
soit l’orientation du capteur par rapport
aux antennes du module d’entrée.
Un module d’entrée et un capteur
optimisés sont des facteurs clés de réus-
site, mais pas suffisants ! D’autres exigen-
ces (fiabilité élevée, faibles retards de
transmission et gestion de multiples cap-
teurs) entrent en ligne de compte. Pour y
répondre, un protocole de communica-
tion sur mesure s’impose, capable d’assu-
rer aux capteurs un accès radio sans
collision en allouant à chacun d’eux un
créneau de temps et de fréquence pen-
dant lequel il est autorisé à transmettre.
Les paramètres de cet accès multiple
réparti dans le temps et de ce multiple-
xage fréquentiel (TDMA/FDM) sont choi-
sis pour satisfaire aux exigences d’une
profusion de capteurs, garantir les temps
de réponse courts et exploiter pleinement
la bande radio disponible. Grâce à une
nouvelle technique de saut de fréquence,
associée à la détection d’erreurs et à la
retransmission automatique en cas de
panne, les messages issus des capteurs
6
L’électronique du module de communication
Bobine de réception omnidirectionnelle destinée à l’alimentation et, au premier plan,
antenne intégrée pour la transmission radio
6

48 Revue ABB 4/2002
Technology review
sont délivrés en toute fiabilité, même en
présence de systèmes perturbateurs
(Bluetooth, WLAN, fours à micro-ondes
et systèmes d’identification automatique).
Pour réduire au minimum la consom-
mation d’énergie, le module de commu-
nication du capteur reste en sommeil tant
que le capteur ne change pas d’état. Sur
apparition d’un événement, le capteur
établit de suite une liaison radio à l’aide
d’un signal pilote fourni par le module
d’entrée, puis envoie son message, le
tout en 2 ms ou, au pire, 10 à 15 ms si ce
message nécessite plusieurs retransmis-
sions. A des fins de diagnostic du sys-
tème, les capteurs signalent leur présence
deux fois par seconde.
Une consommation réduite
Le détecteur de proximité règne en maî-
tre parmi les capteurs de position utilisés
dans les machines et les robots. Son
constituant principal est un oscillateur
basse fréquence créant un champ électro-
magnétique à l’avant de sa face sensible.
L’entrée d’une pièce métallique dans le
champ rayonné entraîne un déséquilibre
de l’oscillateur. Cette modification de
la forme d’onde est alors détectée et le
capteur délivre un signal de sortie appro-
prié.
Cela étant, il faut minimiser la
consommation de ces appareils sans fil.
Deux solutions existent : faire usage de
composants électroniques du marché à
ultra faible consommation ou diminuer le
facteur de marche du capteur. Dans ce
dernier cas, l’acquisition des données
n’est pas continue; le capteur n’est activé
que pour effectuer sa mesure, puis désac-
tivé sur une « longue» période. Après
avoir travaillé sur ces deux possibilités,
ABB opta pour une tête de détection du
commerce équipée d’une électronique
basse consommation qu’il adapta à ses
besoins.
Le succès commercial au
rendez-vous
La Foire de Hanovre 2002 (Allemagne)
fut pour ABB l’occasion de présenter les
tout premiers exemplaires de détecteurs
de proximité sans fil ; ceux-ci ont sus-
cité l’enthousiasme des constructeurs de
machines et utilisateurs qui ont pu cons-
tater l’intérêt de ces capteurs montés sur
des machines d’assemblage, des lignes de
production et des robots.
Leur commercialisation débutera au
deuxième trimestre 2003. L’offre sera
initialement constituée de détecteurs de
proximité sans fil, d’un type d’alimenta-
tion, d’un câble de boucle primaire,
7
Détecteurs de proximité sans fil montés sur un préhenseur de robot (Foire de Hanovre 2002)7

Revue ABB 4/2002 49
d’une antenne radio et d’un module d’en-
trée communiquant avec le contrôle-com-
mande de la machine via une connexion
ABB FieldBusPlug.
Le détecteur de proximité sans fil
d’ABB se compose essentiellement d’un
module de communication et d’une tête
de détection . L’alimentation, la trans-
mission et le dialogue homme-machine
sont assurés par un seul et unique type
de module de communication. Pour cou-
vrir des distances de détection allant de
1,5 mm à 15 mm, les têtes de détection
sont proposées en plusieurs tailles
(M8×1, M12×1, M18×1 et M30×1,5), en
montage noyé ou non noyé.
Un potentiel illimité
Une fois relevés les trois grands défis que
sont la distribution de puissance, la fiabi-
lité et le retard de transmission, les nou-
veaux détecteurs de proximité sans fil
d’ABB annoncent le décollage du sans-fil
dans l’automatisation industrielle.
Si le système exposé dans cet article
se prête avant tout aux détecteurs de pro-
ximité sans fil, il va sans dire qu’il peut
être étendu à d’autres capteurs et action-
neurs. Ses techniques d’alimentation et
de transmission génériques pourraient
faire merveille dans des applications ABB
inédites.
8
Auteurs
Christoffer ApnesethSnorre KjesbuDr Dacfey DzungDr Guntram Scheible ABB Corporate [email protected]@[email protected]@de.abb.com
Wolfgang Zimmermann ABB STOTZ-KONTAKT [email protected]
References[1] W. Zimmermann: Kabel eliminiert (Cabling eliminated). Computer & Automation 10/2002 Mindelheim, Germany, Oct 2002.
[2] ABB FieldBusPlug – LA solution à l’hétérogénéité des bus de terrain. Revue ABB 1/2002, 30–34.
[3] G. Scheible : Wireless energy autonomous systems: Industrial use? Sensoren und Messysteme VDE/IEEE Conference, Ludwigsburg, Germany,
March 11–12 2002.
[4] International Commission on Non-Ionizing Radiation Protection (ICNIRP): Guidelines for Limiting Exposure to Time-Varying Electric, Magnetic, and
Electromagnetic Fields (up to 300 GHz). Health Physics vol 74, no 4, 494–522, 1998.
[5] J. Endresen, et collaborateurs: BluetoothTM – Une nouvelle norme de communication sans fil… aux «dents longues». Revue ABB 2/2001, 35–43.
Le détecteur de proximité sans fil est composé de deux parties : au premier
plan, le module de communication avec touche tactile et DEL; à l’arrière plan, la
tête de capteur cylindrique.
8





























