Embed Size (px)
DESCRIPTION
Utilisation de coorecteurd'avance de phase
Citation preview

Généralités
Cahier des charges
Rappel Théorique
1) Correction par avance de phase
2) Détermination des paramètres
Manipulations
I. Vérification des paramètres du système non corrigé
1) Etude du système en boucle ouverte
2) Etude du système en boucle fermée
II. Détermination des paramètres des régulateurs
1) Détermination de Kc
2) Détermination du facteur d'avance de phase "a"
3) Détermination de "T" du correcteur
4) Détermination de la fonction de transfert du correcteur
III. Conception et simulation du circuit électrique du correcteur
Conclusion

Généralités
Un servomoteur est un moteur électrique muni d'engrenages et commandé par un circuit
interne de détection de position. Outre la tension d'alimentation, on applique à un servomoteur
un signal de commande qui lui indique la position à prendre. Il surveille donc lui-même son
attitude et la maintient ou la modifie, selon les ordres. Ce type de machines est utilisé
couramment dans le robotique .
L'amélioration de la précision du système c'est à dire la position précis à prendre nous amène
à concevoir un correcteur avance de phase pour le control de servomoteur et répondre aux
exigences de cahier des charges. Pour cela nous allons déterminer les paramètres du
correcteur avance de phase et étudier son effet sur le système à l'aide du logiciel MATLAB
d'une part, et d'autre part nous allons établir son schéma électronique pour sa réalisation.
Parmi les Objectifs de ce TP sont:
Simulation de fonctions de transferts sous MATLABR
Familiarisation avec la structure de correction avance de phase.
Analyse des performances d'un système après correction
Réalisation du correcteur sous forme de circuit électronique
Cahier des charges
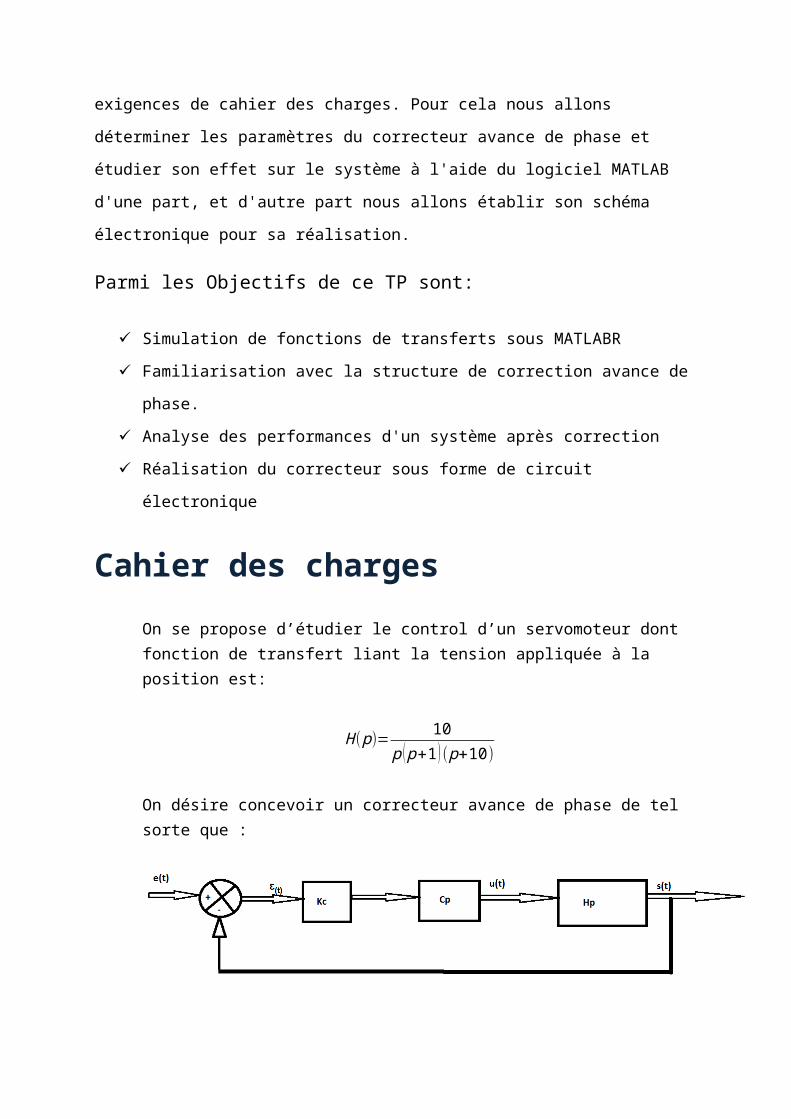
On se propose d’étudier le control d’un servomoteur dont fonction de transfert liant la tension appliquée à la position est:
H ( p)= 10p (p+1 )(p+10)
On désire concevoir un correcteur avance de phase de tel sorte que :
avec : 1+aTp1+aTp
le cahier de charge exige d'avoir les critères suivants après la correction du système :1. Erreur de vitesse ≤ 0.25 s-1
2. Marge de phase ≥ 45°3. Marge de gain ≥ 8dB
Rappel Théorique
1) Correction par avance de phase
Un correcteur par avance de phase est défini par sa fonction de transfert sous la forme :
C ( p )=Kr 1+a .T . p1+T . p
diagramme de Bode d'un correcteur par avance de phase :

Figure1 : Diagramme de Bode du correcteur avance de phase
Resultats Principaux : ϕM=arcsina−1a+1
ωMax= 1T √a
2) Détermination des paramètres
Dans cette partie, on procède les étapes suivantes pour calculer les différents paramètres inconnus de la fonction de transfert du correcteur :
1- Définir par une condition sur la précision de la boucle le gain Kr et repérer la phase 𝛟(0dB) pour la
pulsation 𝜔(0dB) de fonction du transfert de boucle ouverte avec seulement Kr .
2 - Calculer la marge de phase résultante M𝛟r=180+𝛟(𝜔0dB) et l’apport de phase du correcteur 𝛟max=M𝛟desiré - M𝛟r pour respecter la marge de phase désirée M𝛟desiré .3 - En déduire a=
1+sin (ϕmax)1−sin (ϕmax )
et T= 1ω(0dB)√a

Manipulations
I. Vérification des paramètres du système non corrigé
1) Etude du système en boucle ouverte
la fonction du transfert en boucle ouvert est :
H ( p)= 10p (p+1 )(p+10)
pour tracer cette fonction sous MATLAB on utilise certains codes :
code :pour définition de la fonction du transfert
code :tracage de diagramme de Bode de la fonction du transfert

code : la marge de phase et celle du gain
donc la marge du gain MG =11 dB et la marge de phase correspondante est MF =47,4°
code : calcul des pôles de la fonction du transfert

le système est en limite de stabilité car certain à partie réelle nul
code :le gain de la fonction du transfert
le système est instable , le gain est infinie. dans ce cas on ne parle pas du gain.
code : carte des poles
Il y a un pole nul (sur l'axe des imaginaires) donc le système est instable.
2) Etude du système en boucle fermée

la réponse indicielle du système bouclé à retour unitaire.
code : calcul du numérateur et dénominateur de la nouvelle fonction de transfert en boucle
fermée
code : calcul de la fonction du transfert en BF
code : Réponse indicielle

Le dépassement est : D1=0,21
Temps de réponse à 5% est : Tr5% =8,49 s
stabilité en boucle fermée:
on utilise le critère de ROUTH :
on a H bf=10
10+10 p+11 p2+ p3
p3 1 10
p2 11 10
p 9,1 0
1 10 0Le premier colonne est constitué des valeur de signe positive, alors le système est stable en
boucle fermée selon le critère de ROUTH.
code : Réponse à une rampe

l'erreur de vitesse est : ɛv =8-7,006 =0,994 s-1 .
Conclusion
On remarque que l'erreur de vitesse est supérieur à celui demandé par cahier de charge 0,25s-1
donc on est obliger d'ajouter un correcteur pour améliorer la précision du système tout en
répondant à ce qui est demandé par le cahier des charges.
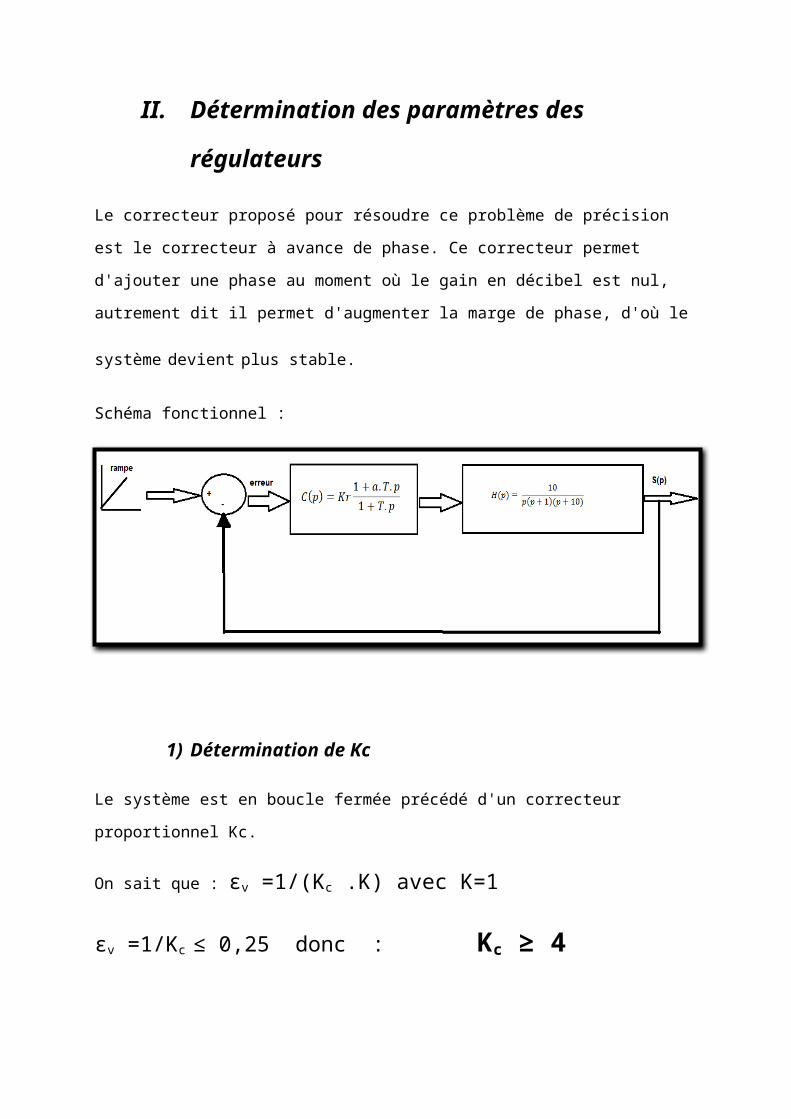
II. Détermination des paramètres des régulateurs
Le correcteur proposé pour résoudre ce problème de précision est le correcteur à avance de
phase. Ce correcteur permet d'ajouter une phase au moment où le gain en décibel est nul,
autrement dit il permet d'augmenter la marge de phase, d'où le système devient plus stable.

Schéma fonctionnel :
1) Détermination de Kc
Le système est en boucle fermée précédé d'un correcteur proportionnel Kc.
On sait que : ɛv =1/(Kc .K) avec K=1
ɛv =1/Kc ≤ 0,25 donc : Kc ≥ 4
on prend Kc = 4 donc : Kc . H ( p)= 4010 p+11 p2+ p3
code : réponse à une rampe
ɛv =9,4-9,179=0,221 s-1 ≤ 0,25 s-1
NB : Condition sur l'erreur de vitesse est vérifié pour Kc=4.
Remarque : l'augmentation du gain rend le système plus précis(la sortie suit l'entrée).
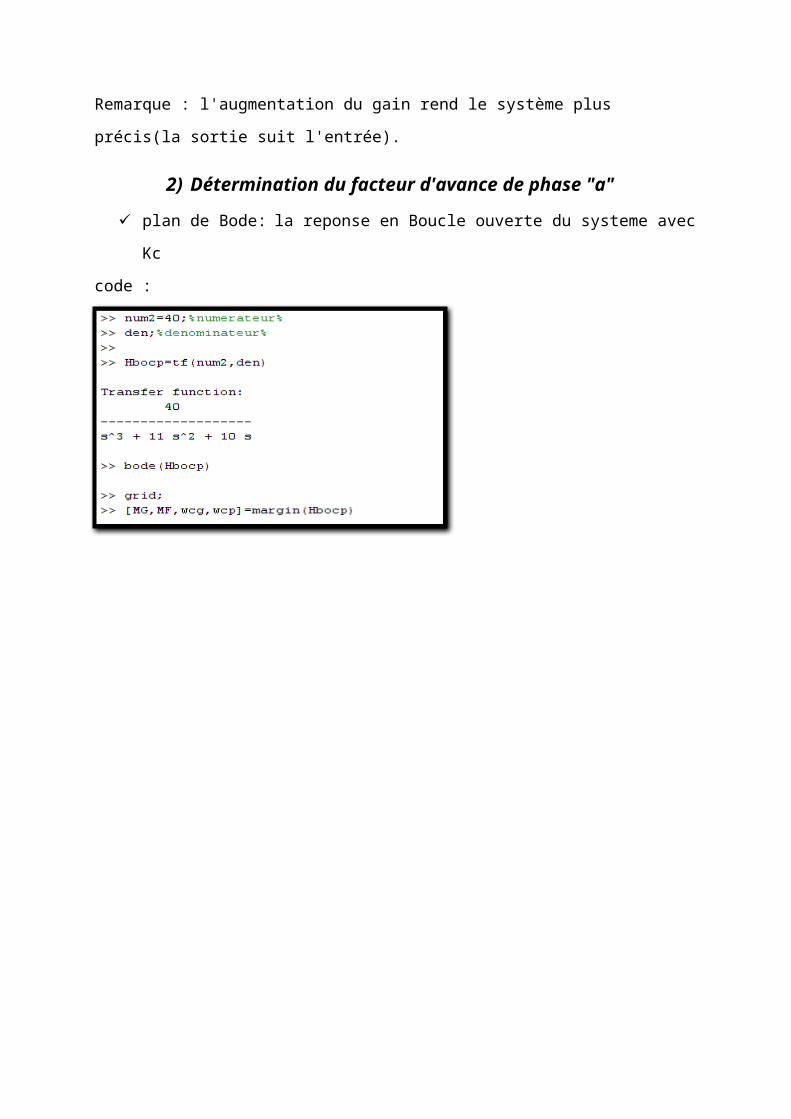
2) Détermination du facteur d'avance de phase "a"
plan de Bode: la reponse en Boucle ouverte du systeme avec Kc
code :

les marges de stabilité
la marge de phase MF =17,7° et marge de gain est MG=2,75 dB et wcg = 3.1623
rad/s et wcp = 1.8612 rad/s.
Si le système est en boucle fermée sans correcteur on a :
Remarques :
1 - on remarque les marges de phase et de gain ont diminué lorsqu'on a introduit le
correcteur proportionnel, alors le système s'approche de l'instabilité en augmentant le
gain du système.
2 - la marge de phase M𝛟 =17,7° ≤ 45° ,le système ne respecte pas le cahier du
charge.
Phase ajouté par correcteur 𝛟max
𝛟demandé = 𝛟sys+ 𝛟max alors : 𝛟max = 𝛟demandé - 𝛟sys
𝛟max =45-17,7 𝛟max =27,3°
En pratique, on ajoute 5° à 12° comme sécurité à la marge de phase souhaité.
On va ajouté 𝛟ajouté =(5°+12°)/2 =8,5°
donc M𝛟demandé = 45+8,5 =53,5° donc 𝛟max =53,5-17,7°
𝛟max=35,8°
Calcul de a
a=1+sin (ϕmax)1−sin (ϕmax )

alors a=3,818
3) Détermination de "T" du correcteur
4) Détermination de la fonction de transfert du correcteur