-
7/27/2019 V, Saouma FEM I.pdf
1/304
DraftDRAFT
Lecture Notes in:
FINITE ELEMENT IFramed Structures
CVEN4525/5525
cVICTOR E. SAOUMA,
Fall 2002
Dept. of Civil Environmental and Architectural Engineering
University of Colorado, Boulder, CO 80309-0428
-
7/27/2019 V, Saouma FEM I.pdf
2/304
Draft02
Blank page
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
3/304
Draft
Contents
1 INTRODUCTION 111.1 Why Matrix Structural Analysis? . . . . . .
. . . . . . . . . . . . . . . . . . . . . 111.2 Overview of
Structural Analysis . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 121.3 Structural Idealization . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 13
1.3.1 Structural Discretization . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 141.3.2 Coordinate Systems . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 15
1.3.3 Sign Convention . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 161.4 Degrees of Freedom . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 161.5 Course
Organization . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 19
I Matrix Structural Analysis of Framed Structures 111
2 ELEMENT STIFFNESS MATRIX 212.1 Introduction . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2
Influence Coefficients . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 212.3 Flexibility Matrix (Review) . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 222.4 Stiffness
Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 232.5 Force-Displacement Relations . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 24
2.5.1 Axial Deformations . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 242.5.2 Flexural Deformation . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 242.5.3 Torsional
Deformations . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 272.5.4 Shear Deformation . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 29
2.6 Putting it All Together, [k] . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 2112.6.1 Truss Element . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 2122.6.2 Beam
Element . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 212
2.6.2.1 Euler-Bernoulli . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 2132.6.2.2 Timoshenko Beam . . . . . . . . . . . .
. . . . . . . . . . . . . . 213
2.6.3 2D Frame Element . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 215
2.6.4 Grid Element . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 2152.6.5 3D Frame Element . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 216
2.7 Remarks on Element Stiffness Matrices . . . . . . . . . . .
. . . . . . . . . . . . . 2172.8 Homework . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 218
3 STIFFNESS METHOD; Part I: ORTHOGONAL STRUCTURES 313.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 313.2 The Stiffness Method . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 31
-
7/27/2019 V, Saouma FEM I.pdf
4/304
Draft02 CONTENTS
3.3 Examples . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 33E 3-1 Beam . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 33E 3-2 Frame . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 35E 3-3 Grid . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 38
3.4 Observations . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 311
3.5 Homework . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 312
4 TRANSFORMATION MATRICES 414.1 Preliminaries . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.1.1 [ke] [Ke] Relation . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 414.1.2 Direction Cosines . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 42
4.2 Transformation Matrices For Framework Elements . . . . . . .
. . . . . . . . . . 444.2.1 2 D cases . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 45
4.2.1.1 2D Frame . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 454.2.1.2 Grid . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 454.2.1.3 2D Truss . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 46
4.2.2 3D Frame . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 474.2.3 3D Truss . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 411
5 STIFFNESS METHOD; Part II 515.1 Direct Stiffness Method . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.1.1 Global Stiffness Matrix . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 515.1.1.1 Structural Stiffness Matrix . . . .
. . . . . . . . . . . . . . . . . 525.1.1.2 Augmented Stiffness
Matrix . . . . . . . . . . . . . . . . . . . . 52
5.2 Logistics . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 535.2.1 Boundary Conditions, [ID]
Matrix . . . . . . . . . . . . . . . . . . . . . . 535.2.2 LM
Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 545.2.3 Assembly of Global Stiffness Matrix . . . . . .
. . . . . . . . . . . . . . . 54
E 5-1 Assembly of the Global Stiffness Matrix . . . . . . . . .
. . . . . . . . . . 555.2.4 Algorithm . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 57E 5-2 Direct Stiffness
Analysis of a Truss . . . . . . . . . . . . . . . . . . . . . . 57E
5-3 Analysis of a Frame with MATLAB . . . . . . . . . . . . . . . .
. . . . . 512E 5-4 Analysis of a simple Beam with Initial
Displacements . . . . . . . . . . . 515
5.3 Skyline Storage of Global Stiffness Matrix, MAXA Vector . .
. . . . . . . . . . . 5195.4 Computer Program Organization . . . .
. . . . . . . . . . . . . . . . . . . . . . . 5225.5 Computer
Program Flow Charts (FORTRAN) . . . . . . . . . . . . . . . . . .
524
5.5.1 Input . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 5255.5.2 Element Stiffness Matrices . . . .
. . . . . . . . . . . . . . . . . . . . . . . 5285.5.3 Assembly . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
528
5.5.4 Decomposition . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 5315.5.5 Load . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 5315.5.6
Backsubstitution . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 5315.5.7 Internal Forces and Reactions . . . . . . .
. . . . . . . . . . . . . . . . . . 531
5.6 Computer Implementation with MATLAB . . . . . . . . . . . .
. . . . . . . . . . 5355.6.1 Program Input . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 535
5.6.1.1 Input Variable Descriptions . . . . . . . . . . . . . .
. . . . . . . 5365.6.1.2 Sample Input Data File . . . . . . . . . .
. . . . . . . . . . . . . 5375.6.1.3 Program Implementation . . . .
. . . . . . . . . . . . . . . . . . 538
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
5/304
DraftCONTENTS 03
5.6.2 Program Listing . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 5385.6.2.1 Main Program . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 5385.6.2.2 Assembly ofID Matrix .
. . . . . . . . . . . . . . . . . . . . . . 5405.6.2.3 Element
Nodal Coordinates . . . . . . . . . . . . . . . . . . . . .
5415.6.2.4 Element Lengths . . . . . . . . . . . . . . . . . . . .
. . . . . . . 542
5.6.2.5 Element Stiffness Matrices . . . . . . . . . . . . . . .
. . . . . . 5425.6.2.6 Transformation Matrices . . . . . . . . . .
. . . . . . . . . . . . 5435.6.2.7 Assembly of the Augmented
Stiffness Matrix . . . . . . . . . . . 5445.6.2.8 Print General
Information . . . . . . . . . . . . . . . . . . . . . 5455.6.2.9
Print Load . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 5455.6.2.10 Load Vector . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 5465.6.2.11 Nodal Displacements . . . . . . . . .
. . . . . . . . . . . . . . . 5475.6.2.12 Reactions . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 5485.6.2.13 Internal
Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5495.6.2.14 Sample Output File . . . . . . . . . . . . . . . . . .
. . . . . . . 550
5.7 Homework . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 552
6 EQUATIONS OF STATICS and KINEMATICS 616.1 Statics Matrix [B] .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 61
6.1.1 Statically Determinate . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 61E 6-1 Statically Determinate Truss Statics
Matrix . . . . . . . . . . . . . . . . . 62E 6-2 Beam Statics
Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
636.1.2 Statically Indeterminate . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 64E 6-3 Statically Indeterminate Truss
Statics Matrix . . . . . . . . . . . . . . . . 65E 6-4 Selection of
Redundant Forces . . . . . . . . . . . . . . . . . . . . . . . .
676.1.3 Kinematic Instability . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 69
6.2 Kinematics Matrix [A] . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 69E 6-5 Kinematics Matrix of a Truss .
. . . . . . . . . . . . . . . . . . . . . . . . 610
6.3 Statics-Kinematics Matrix Relationship . . . . . . . . . . .
. . . . . . . . . . . . 6106.3.1 Statically Determinate . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 6116.3.2 Statically
Indeterminate . . . . . . . . . . . . . . . . . . . . . . . . . . .
611
6.4 Kinematic Relations through Inverse of Statics Matrix . . .
. . . . . . . . . . . . 6126.5 Congruent Transformation Approach to
[K] . . . . . . . . . . . . . . . . . . . . 612
E 6-6 Congruent Transformation . . . . . . . . . . . . . . . . .
. . . . . . . . . . 613E 6-7 Congruent Transformation of a Frame .
. . . . . . . . . . . . . . . . . . . 615
7 FLEXIBILITY METHOD 717.1 Introduction . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 717.2
Flexibility Matrix . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 71
7.2.1 Solution of Redundant Forces . . . . . . . . . . . . . . .
. . . . . . . . . . 727.2.2 Solution of Internal Forces and
Reactions . . . . . . . . . . . . . . . . . . 737.2.3 Solution of
Joint Displacements . . . . . . . . . . . . . . . . . . . . . . . .
73E 7-1 Flexibility Method . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 73
7.3 Stiffness Flexibility Relations . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 757.3.1 From Stiffness to Flexibility
. . . . . . . . . . . . . . . . . . . . . . . . . . 75E 7-2
Flexibility Matrix . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 767.3.2 From Flexibility to Stiffness . . . . . . . .
. . . . . . . . . . . . . . . . . . 76E 7-3 Flexibility to
Stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
6/304
Draft04 CONTENTS
7.4 Stiffness Matrix of a Curved Element . . . . . . . . . . . .
. . . . . . . . . . . . . 797.5 Duality between the Flexibility and
the Stiffness Methods . . . . . . . . . . . . . 7107.6 Homework . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 711
8 SPECIAL ANALYSIS PROCEDURES 81
8.1 Semi-Rigid Beams . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 818.2 Nonuniform Torsion . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 838.3 Inclined
Supports . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 838.4 Condensation . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 838.5 Substructuring . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 838.6 Reanalysis . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 838.7 Constraints . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
II Introduction to Finite Elements 85
9 REVIEW OF ELASTICITY 91
9.1 Stress . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 919.1.1 Stress Traction Relation . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 92E 9-1 Stress
Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 92
9.2 Strain . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 949.3 Fundamental Relations in
Elasticity . . . . . . . . . . . . . . . . . . . . . . . . . 95
9.3.1 Equation of Equilibrium . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 95E 9-2 Equilibrium Equation . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 969.3.2 Compatibility
Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
9.4 Stress-Strain Relations in Elasticity . . . . . . . . . . .
. . . . . . . . . . . . . . . 979.5 Strain Energy Density . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 989.6
Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 98
10 VARIATIONAL AND ENERGY METHODS 10110.1 Work, Energy &
Potentials; Definitions . . . . . . . . . . . . . . . . . . . . . .
. . 101
10.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 10110.1.2 Internal Strain Energy . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 102
10.1.2.1 Internal Work versus Strain Energy . . . . . . . . . .
. . . . . . 10310.1.3 External Work . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 104
10.1.3.1 Path Independence of External Work . . . . . . . . . .
. . . . 10510.1.4 Virtual Work . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 10610.1.5 Complementary Virtual
Work . . . . . . . . . . . . . . . . . . . . . . . . . 106
10.1.5.1 Internal Virtual Work . . . . . . . . . . . . . . . . .
. . . . . . . 10610.1.5.1.1 Elastic Systems . . . . . . . . . . . .
. . . . . . . . . . 106
10.1.5.1.2 Linear Elastic Systems . . . . . . . . . . . . . . .
. . . 10810.1.5.2 External Virtual Work W . . . . . . . . . . . . .
. . . . . . . . 109
10.1.6 Complementary Virtual Work . . . . . . . . . . . . . . .
. . . . . . . . . . 10910.1.6.1 Internal Complementary Virtual
Strain Energy U . . . . . . . 109
10.1.6.1.1 Arbitrary System . . . . . . . . . . . . . . . . . .
. . . 10910.1.6.1.2 Linear Elastic Systems . . . . . . . . . . . .
. . . . . . 1010
10.1.6.2 External Complementary Virtual Work W . . . . . . . . .
. . 101010.1.7 Potential Energy . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 1011
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
7/304
DraftCONTENTS 05
10.1.7.1 Potential Functions . . . . . . . . . . . . . . . . . .
. . . . . . . 101110.1.7.2 Potential of External Work . . . . . . .
. . . . . . . . . . . . . . 101110.1.7.3 Potential Energy . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1011
10.2 Principle of Virtual Work and Complementary Virtual Work .
. . . . . . . . . . 101110.2.1 Principle of Virtual Work . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1012
10.2.1.1 Derivation . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 1012E 10-1 Tapered Cantiliver Beam, Virtual
Displacement . . . . . . . . . . . . . . . 101510.2.2 Principle of
Complementary Virtual Work . . . . . . . . . . . . . . . . . .
1017
10.2.2.1 Derivation . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 1017E 10-2 Tapered Cantilivered Beam; Virtual Force .
. . . . . . . . . . . . . . . . . 1018E 10-3 Three Hinged
Semi-Circular Arch . . . . . . . . . . . . . . . . . . . . . . .
1020E 10-4 Cantilivered Semi-Circular Bow Girder . . . . . . . . .
. . . . . . . . . . . 1021
10.3 Potential Energy . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 102310.3.1 Derivation . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 102310.3.2
Euler Equations of the Potential Energy . . . . . . . . . . . . . .
. . . . 102510.3.3 Castiglianos First Theorem . . . . . . . . . . .
. . . . . . . . . . . . . . . 1027E 10-5 Fixed End Beam, Variable I
. . . . . . . . . . . . . . . . . . . . . . . . . . 102810.3.4
Rayleigh-Ritz Method . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1029E 10-6 Uniformly Loaded Simply Supported Beam;
Polynomial Approximation . 1031E 10-7 Uniformly Loaded Simply
Supported Beam; Fourrier Series . . . . . . . . 1032E 10-8 Tapered
Beam; Fourrier Series . . . . . . . . . . . . . . . . . . . . . . .
. 1033
10.4 Complementary Potential Energy . . . . . . . . . . . . . .
. . . . . . . . . . . . 103510.4.1 Derivation . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 103510.4.2
Castiglianos Second Theorem . . . . . . . . . . . . . . . . . . . .
. . . . . 1035E 10-9 Cantilivered beam . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 1036
10.4.2.1 Distributed Loads . . . . . . . . . . . . . . . . . . .
. . . . . . . 1036E 10-10Deflection of a Uniformly loaded Beam
using Castiglianos second Theorem1036
10.5 Comparison of Alternate Approximate Solutions . . . . . . .
. . . . . . . . . . . 1037
E 10-11Comparison of MPE Solutions . . . . . . . . . . . . . . .
. . . . . . . . . 103710.6 Summary . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 103810.7
Variational Calculus; Preliminaries . . . . . . . . . . . . . . . .
. . . . . . . . . . 1041
10.7.1 Euler Equation . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 104110.7.2 Boundary Conditions . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 1045E 10-12Extension
of a Bar . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 1045E 10-13Flexure of a Beam . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 1047
10.8 Homework . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 1048
11 INTERPOLATION FUNCTIONS 11111.1 Introduction . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
111
11.2 Shape Functions . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 11111.2.1 Axial/Torsional . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 11211.2.2
Generalization . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 11311.2.3 Flexural . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 11411.2.4 Constant Strain
Triangle Element . . . . . . . . . . . . . . . . . . . . . .
115
11.3 Interpolation Functions . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 11711.3.1 C0: Lagrangian Interpolation
Functions . . . . . . . . . . . . . . . . . . . 118
11.3.1.1 Constant Strain Quadrilateral Element . . . . . . . . .
. . . . . 11811.3.1.2 Solid Rectangular Trilinear Element . . . . .
. . . . . . . . . . . 119
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
8/304
Draft06 CONTENTS
11.3.2 C1: Hermitian Interpolation Functions . . . . . . . . . .
. . . . . . . . . . 111011.4 Interpretation of Shape Functions in
Terms of Polynomial Series . . . . . . . . . 1110
12 FINITE ELEMENT FORMULATION 12112.1 Strain Displacement
Relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
121
12.1.1 Axial Members . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 12112.1.2 Flexural Members . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 12212.2 Virtual
Displacement and Strains . . . . . . . . . . . . . . . . . . . . .
. . . . . . 12212.3 Element Stiffness Matrix Formulation . . . . .
. . . . . . . . . . . . . . . . . . . 122
12.3.1 Stress Recovery . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 124
13 SOME FINITE ELEMENTS 13113.1 Introduction . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13113.2
Truss Element . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 13113.3 Flexural Element . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 13213.4
Triangular Element . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 132
13.4.1 Strain-Displacement Relations . . . . . . . . . . . . . .
. . . . . . . . . . 133
13.4.2 Stiffness Matrix . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 13313.4.3 Internal Stresses . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 13413.4.4
Observations . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 134
13.5 Quadrilateral Element . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 13513.6 Homework . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
14 DYNAMIC ANALYSIS 14114.1 Introduction . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 14114.2
Variational Formulation . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 141
14.2.1 Explicit Time Integration; Central Difference . . . . . .
. . . . . . . . . . 14314.2.2 Implicit Time Integration . . . . . .
. . . . . . . . . . . . . . . . . . . . . 144
14.2.2.1 Linear Case . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 14414.2.2.2 NonLinear Case . . . . . . . . . . . .
. . . . . . . . . . . . . . . 14414.3 Time Discretization . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
14.3.1 Explicit Time Integration . . . . . . . . . . . . . . . .
. . . . . . . . . . . 14514.3.1.1 Linear Systems . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 145
E 14-1 MATLAB Code for Explicit Time Integration . . . . . . . .
. . . . . . . . 14814.3.1.2 NonLinear Systems . . . . . . . . . . .
. . . . . . . . . . . . . . 149
14.3.2 Implicit Case . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 14914.3.2.1 Newmark Method; Forward
difference . . . . . . . . . . . . . . . 14914.3.2.2 Linear Case .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
141114.3.2.3 NonLinear Case . . . . . . . . . . . . . . . . . . . .
. . . . . . . 1411
14.4 Free Vibration . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 141114.5 Homework . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1413
15 GEOMETRIC NONLINEARITY 15115.1 Introduction . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
15.1.1 Strong Form . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 15215.1.1.1 Lower Order Differential
Equation; Essential B.C. . . . . . . . . 15215.1.1.2 Higher Order
Differential Equation; Essential and Natural B.C. 153
15.1.2 Weak Form . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 156
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
9/304
DraftCONTENTS 07
15.1.2.1 Strain Energy . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 15615.1.2.2 Euler Equation . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 157
15.2 Finite Element Discretization . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 15815.3 Elastic Instability;
Bifurcation Analysis . . . . . . . . . . . . . . . . . . . . . . .
159
E 15-1 Column Stability . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 1510
E 15-2 Frame Stability . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 151315.4 Second-Order Elastic Analysis;
Geometric Non-Linearity . . . . . . . . . . . . . . 1515
E 15-3 Effect of Axial Load on Flexural Deformation . . . . . .
. . . . . . . . . . 1516E 15-4 Bifurcation . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 1519
15.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 1522
16 REFERENCES 161
A REVIEW of MATRIX ALGEBRA A1A.1 Definitions . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A1A.2
Elementary Matrix Operations . . . . . . . . . . . . . . . . . . .
. . . . . . . . . A3A.3 Determinants . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . A3
A.4 Singularity and Rank . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . A4A.5 Inversion . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . A5A.6
Eigenvalues and Eigenvectors . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . A5
B SOLUTIONS OF LINEAR EQUATIONS B1B.1 Introduction . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B1B.2 Direct Methods . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . B1
B.2.1 Gauss, and Gaus-Jordan Elimination . . . . . . . . . . . .
. . . . . . . . . B1E B-1 Gauss Elimination . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . B2E B-2 Gauss-Jordan
Elimination . . . . . . . . . . . . . . . . . . . . . . . . . . .
B3
B.2.1.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . B4
B.2.2 LU Decomposition . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . B4B.2.2.1 Algorithm . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . B5E B-3 Example . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . B5B.2.3
Choleskys Decomposition . . . . . . . . . . . . . . . . . . . . . .
. . . . . B6E B-4 Choleskys Decomposition . . . . . . . . . . . . .
. . . . . . . . . . . . . . B7B.2.4 Pivoting . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . B8
B.3 Indirect Methods . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . B8B.3.1 Gauss Seidel . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . B8
B.4 Ill Conditioning . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . B9B.4.1 Condition Number . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . B9B.4.2 Pre
Conditioning . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . B9B.4.3 Residual and Iterative Improvements . . . . . . .
. . . . . . . . . . . . . . B10
C TENSOR NOTATION C1C.1 Engineering Notation . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . C1C.2 Dyadic/Vector
Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . C1C.3 Indicial/Tensorial Notation . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . C2
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
10/304
Draft08 CONTENTS
D INTEGRAL THEOREMS D1D.1 Integration by Parts . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . D1D.2
Green-Gradient Theorem . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . D1D.3 Gauss-Divergence Theorem . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . D1
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
11/304
Draft
List of Figures
1.1 Global Coordinate System . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 161.2 Local Coordinate Systems . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 161.3 Sign
Convention, Design and Analysis . . . . . . . . . . . . . . . . . .
. . . . . . 161.4 Total Degrees of Freedom for various Type of
Elements . . . . . . . . . . . . . . 171.5 Independent
Displacements . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 171.6 Examples of Global Degrees of Freedom . . . . . . . . .
. . . . . . . . . . . . . . 191.7 Organization of the Course . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 110
2.1 Example for Flexibility Method . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 222.2 Definition of Element Stiffness
Coefficients . . . . . . . . . . . . . . . . . . . . . . 252.3
Stiffness Coefficients for One Dimensional Elements . . . . . . . .
. . . . . . . . . 262.4 Flexural Problem Formulation . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 262.5 Torsion Rotation
Relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 282.6 Deformation of an Infinitesimal Element Due to Shear . . .
. . . . . . . . . . . . 292.7 Effect of Flexure and Shear
Deformation on Translation at One End . . . . . . . 2112.8 Effect
of Flexure and Shear Deformation on Rotation at One End . . . . . .
. . . 2122.9 Coordinate System for Element Stiffness Matrices . . .
. . . . . . . . . . . . . . . 212
3.1 Problem with 2 Global d.o.f. 1 and 2 . . . . . . . . . . . .
. . . . . . . . . . . . 323.2 Frame Example (correct K23) . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 363.3 Grid Example
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 39
4.1 Arbitrary 3D Vector Transformation . . . . . . . . . . . . .
. . . . . . . . . . . . 434.2 3D Vector Transformation . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 434.3 2D Frame
Element Rotation with respect to Z (or z) . . . . . . . . . . . . .
. . . 454.4 Grid Element Rotation . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 464.5 2D Truss Rotation . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.6
Reduced 3D Rotation . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 484.7 Special Case of 3D Transformation for
Vertical Members . . . . . . . . . . . . . . 494.8 Complex 3D
Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 410
5.1 Frame Example . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 515.2 Example for [ID] Matrix
Determination . . . . . . . . . . . . . . . . . . . . . . . 545.3
Simple Frame Analyzed with the MATLAB Code . . . . . . . . . . . .
. . . . . . 555.4 . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 585.5 Simple Frame Analyzed
with the MATLAB Code . . . . . . . . . . . . . . . . . . 5135.6
Stiffness Analysis of one Element Structure . . . . . . . . . . . .
. . . . . . . . . 5165.7 Example of Bandwidth . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 5205.8 Numbering
Schemes for Simple Structure . . . . . . . . . . . . . . . . . . .
. . . 521
-
7/27/2019 V, Saouma FEM I.pdf
12/304
Draft02 LIST OF FIGURES
5.9 Program Flowchart . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 5265.10 Programs Tree Structure . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 5275.11
Flowchart for the Skyline Height Determination . . . . . . . . . .
. . . . . . . . . 5295.12 Flowchart for the Global Stiffness Matrix
Assembly . . . . . . . . . . . . . . . . . 5305.13 Flowchart for
the Load Vector Assembly . . . . . . . . . . . . . . . . . . . . .
. . 532
5.14 Flowchart for the Internal Forces . . . . . . . . . . . . .
. . . . . . . . . . . . . . 5335.15 Flowchart for the Reactions . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 5345.16
Structure Plotted with CASAP . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 550
6.1 Example of [B] Matrix for a Statically Determinate Truss . .
. . . . . . . . . . . 626.2 Example of [B] Matrix for a Statically
Determinate Beam . . . . . . . . . . . . . 646.3 Example of [B]
Matrix for a Statically Indeterminate Truss . . . . . . . . . . . .
656.4 Example 1, Congruent Transfer . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 6146.5 Example 2 . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 616
7.1 Stable and Statically Determinate Element . . . . . . . . .
. . . . . . . . . . . . 75
8.1 Flexible, Rigid, and Semi-Rigid Beams . . . . . . . . . . .
. . . . . . . . . . . . . 818.2 Deformations of a Semi-Rigid Beams
. . . . . . . . . . . . . . . . . . . . . . . . . 828.3 Fixed End
Forces in a Semi-Rigid Beams . . . . . . . . . . . . . . . . . . .
. . . 82
9.1 Stress Components on an Infinitesimal Element . . . . . . .
. . . . . . . . . . . . 919.2 Stresses as Tensor Components . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 929.3 Stress
Traction Relations . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 939.4 Equilibrium of Stresses, Cartesian Coordinates
. . . . . . . . . . . . . . . . . . . 959.5 Fundamental Equations
in Solid Mechanics . . . . . . . . . . . . . . . . . . . . . 99
10.1 Strain Energy and Complementary Strain Energy . . . . . . .
. . . . . . . . . . . 10210.2 Effects of Load Histories on U and Wi
. . . . . . . . . . . . . . . . . . . . . . . . 104
10.3 Torsion Rotation Relations . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 10710.4 Flexural Member . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 10710.5
Tapered Cantilivered Beam Analysed by the Vitual Displacement
Method . . . . 101510.6 Tapered Cantilevered Beam Analysed by the
Virtual Force Method . . . . . . . . 101910.7 Three Hinge
Semi-Circular Arch . . . . . . . . . . . . . . . . . . . . . . . .
. . . 102110.8 Semi-Circular Cantilevered Box Girder . . . . . . .
. . . . . . . . . . . . . . . . . 102210.9 Single DOF Example for
Potential Energy . . . . . . . . . . . . . . . . . . . . . .
102410.10Graphical Representation of the Potential Energy . . . . .
. . . . . . . . . . . . . 102510.11Variable Cross Section Fixed
Beam . . . . . . . . . . . . . . . . . . . . . . . . . .
102810.12Uniformly Loaded Simply Supported Beam Analysed by the
Rayleigh-Ritz Method103110.13Example xx: External Virtual Work . .
. . . . . . . . . . . . . . . . . . . . . . . 1034
10.14Summary of Variational Methods . . . . . . . . . . . . . .
. . . . . . . . . . . . . 103910.15Duality of Variational
Principles . . . . . . . . . . . . . . . . . . . . . . . . . . .
104010.16Variational and Differential Operators . . . . . . . . . .
. . . . . . . . . . . . . . 1042
11.1 Axial Finite Element . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 11211.2 Flexural Finite Element . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11411.3
Shape Functions for Flexure of Uniform Beam Element. . . . . . . .
. . . . . . . 11611.4 Constant Strain Triangle Element . . . . . .
. . . . . . . . . . . . . . . . . . . . . 11611.5 Constant Strain
Quadrilateral Element . . . . . . . . . . . . . . . . . . . . . . .
. 119
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
13/304
DraftLIST OF FIGURES 03
11.6 Solid Trilinear Rectangular Element . . . . . . . . . . . .
. . . . . . . . . . . . . 1110
15.1 Level of Analysis . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 15115.2 Euler Column . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15215.3
Simply Supported Beam Column; Differential Segment; Effect of Axial
Force P . 154
15.4 Solution of the Tanscendental Equation for the Buckling
Load of a Fixed-HingedColumn . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 15515.5 Summary of
Stability Solutions . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 1523
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
14/304
Draft04 LIST OF FIGURES
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
15/304
Draft
List of Tables
1.1 Example of Nodal Definition . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 141.2 Example of Element Definition . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 151.3 Example of
Group Number . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 151.4 Degrees of Freedom of Different Structure Types Systems
. . . . . . . . . . . . . 18
2.1 Examples of Influence Coefficients . . . . . . . . . . . . .
. . . . . . . . . . . . . 21
4.1 3D Transformations of Linear Elements . . . . . . . . . . .
. . . . . . . . . . . . 47
6.1 Internal Element Force Definition for the Statics Matrix . .
. . . . . . . . . . . . 626.2 Conditions for Static Determinacy,
and Kinematic Instability . . . . . . . . . . . 69
10.1 Possible Combinations of Real and Hypothetical Formulations
. . . . . . . . . . . 101210.2 Comparison of 2 Alternative
Approximate Solutions . . . . . . . . . . . . . . . . 103810.3
Summary of Variational Terms Associated with One Dimensional
Elements . . . 104110.4 Essential and Natural Boundary Conditions .
. . . . . . . . . . . . . . . . . . . . 1046
11.1 Characteristics of Beam Element Shape Functions . . . . . .
. . . . . . . . . . . 11511.2 Interpretation of Shape Functions in
Terms of Polynomial Series (1D & 2D) . . . 1111
11.3 Polynomial Terms in Various Element Formulations (1D &
2D) . . . . . . . . . . 1111
-
7/27/2019 V, Saouma FEM I.pdf
16/304
Draft02 LIST OF TABLES
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
17/304
DraftLIST OF TABLES 03
NOTATION
a Vector of coefficcients in assumed displacement fieldA AreaA
Kinematics Matrixb Body force vectorB Statics Matrix, relating
external nodal forces to internal forces[B] Statics Matrix relating
nodal load to internal forces p = [B]P[B] Matrix relating assumed
displacement fields parameters to joint displacementsC
Cosine[C1|C2] Matrices derived from the statics matrix{d} Element
flexibility matrix (lc){dc}[D] Structure flexibility matrix (GC)E
Elastic Modulus[E] Matrix of elastic constants (Constitutive
Matrix)
{F
}Unknown element forces and unknown support reactions
{F0} Nonredundant element forces (lc){Fx} Redundant element
forces (lc){Fe} Element forces (lc){F0} Nodal initial forces{Fe}
Nodal energy equivalent forces{F} Externally applied nodal
forcesFEA Fixed end actions of a restrained memberG Shear modulusI
Moment of inertia[L] Matrix relating the assumed displacement field
parameters
to joint displacements
[I] Idendity matrix[ID] Matrix relating nodal dof to structure
dof J St Venants torsional constant[k] Element stiffness matrix
(lc)[p] Matrix of coefficients of a polynomial series[kg] Geometric
element stiffness matrix (lc)[kr] Rotational stiffness matrix ( [d]
inverse )[K] Structure stiffness matrix (GC)[Kg] Structures
geometric stiffness matrix (GC)L LengthL Linear differential
operator relating displacement to strains
lij Direction cosine of rotated axis i with respect to original
axis j{LM} structure dof of nodes connected to a given element{N}
Shape functions{p} Element nodal forces = F (lc){P} Structure nodal
forces (GC)P , V , M , T Internal forces acting on a beam column
(axial, shear, moment, torsion)R Structure reactions (GC)S Sinet
Traction vector
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
18/304
Draft04 LIST OF TABLES
t Specified tractions along tu Displacement vectoru Neighbour
function to u(x)
u(x) Specified displacements along uu,v,w Translational
displacements along the x, y, and z directions
U Strain energyU Complementary strain energyx, y loacal
coordinate system (lc)X, Y Global coordinate system (GC)W Work
Coefficient of thermal expansion[] Transformation matrix{} Element
nodal displacements (lc){} Nodal displacements in a continuous
system{} Structure nodal displacements (GC) Strain vector
0Initial strain vector
{} Element relative displacement (lc){0} Nonredundant element
relative displacement (lc){x} Redundant element relative
displacement (lc) rotational displacement with respect to z
direction (for 2D structures) Variational operatorM Virtual momentP
Virtual force Virtual rotationu Virtual displacement Virtual
curvatureU Virtual internal strain energy
W Virtual external work Virtual strain vector Virtual stress
vector Surfacet Surface subjected to surface tractionsu Surface
associated with known displacements Stress vector0 Initial stress
vector Volume of body
lc: Local Coordinate systemGC: Global Coordinate System
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
19/304
Draft
Chapter 1
INTRODUCTION
1.1 Why Matrix Structural Analysis?
1 In most Civil engineering curriculum, students are required to
take courses in: Statics,
Strength of Materials, Basic Structural Analysis. This last
course is a fundamental one whichintroduces basic structural
analysis (determination of reactions, deflections, and internal
forces)of both statically determinate and indeterminate
structures.
2 Also Energy methods are introduced, and most if not all
examples are two dimensional. Sincethe emphasis is on hand
solution, very seldom are three dimensional structures analyzed.
Themethods covered, for the most part lend themselves for back of
the envelope solutions andnot necessarily for computer
implementation.
3 Those students who want to pursue a specialization in
structural engineering/mechanics, dotake more advanced courses such
as Matrix Structural Analysis and/or Finite Element Analysis.
4 Matrix Structural Analysis, or Advanced Structural Analysis,
or Introduction to StructuralEngineering Finite Element, builds on
the introductory analysis course to focus on those meth-ods which
lend themselves to computer implementation. In doing so, we will
place equalemphasis on both two and three dimensional structures,
and develop a thorough understandingof computer aided analysis of
structures.
5 This is essential, as in practice most, if not all, structural
analysis are done by the computerand it is imperative that as
structural engineers you understand what is inside those
blackboxes, develop enough self assurance to be capable of opening
them and modify them toperform certain specific tasks, and most
importantly to understand their limitations.
6 With the recently placed emphasis on the finite element method
in most graduate schools,many students have been tempted to skip a
course such as this one and rush into a finite elementone. Hence it
is important that you understand the connection and role of those
two courses.The Finite Element Method addresses the analysis of two
or three dimensional continuum. Assuch, the primary unknowns is u
the nodal displacements, and internal forces are usuallyrestricted
to stress . The only analogous one dimensional structure is the
truss.
7 Whereas two and three dimensional continuum are essential in
civil engineering to modelstructures such as dams, shells, and
foundation, the majority of Civil engineering structuresare
constituted by rod one-dimensional elements such as beams, girders,
or columns. Forthose elements, displacements and internal forces
are somehow more complex than those
-
7/27/2019 V, Saouma FEM I.pdf
20/304
Draft12 INTRODUCTION
encountered in continuum finite elements.
8 Hence, contrarily to continuum finite element where
displacement is mostly synonymous withtranslation, in one
dimensional elements, and depending on the type of structure,
generalizeddisplacements may include translation, and/or flexural
and/or torsional rotation. Similarly,internal forces are not
stresses, but rather axial and shear forces, and/or flexural or
torsionalmoments. Those concepts are far more relevant in the
analysis/design of most civil engineeringstructures.
9 Hence, Matrix Structural Analysis, is truly a bridge course
between introductory analysisand finite element courses. The
element stiffness matrix [k] will first be derived using
methodsintroduced in basic structural analysis, and later using
energy based concepts. This laterapproach is the one exclusively
used in the finite element method.
10 An important component of this course is computer programing.
Once the theory and thealgorithms are thoroughly explained, you
will be expected to program them in either Fortran(preferably 90)
or C (sorry, but no Basic) on the computer of your choice. The
program(typically about 3,500 lines) will perform the analysis of 2
and 3 dimensional truss and frame
structures, and many students have subsequently used it in their
professional activities.
11 There will be one computer assignment in which you will be
expected to perform sim-ple symbolic manipulations using
Mathematica. For those of you unfamiliar with the
BechtelLaboratory, there will be a special session to introduce you
to the operation of Unix on Sunworkstations.
1.2 Overview of Structural Analysis
12 To put things into perspective, it may be helpful to consider
classes of Structural Analysiswhich are distinguished by:
1. Excitation model
(a) Static
(b) Dynamic
2. Structure model
(a) Global geometry
small deformation ( = ux ) large deformation (x = dudx +
12
dvdx
2
, P- effects), chapter 15
(b) Structural elements element types: 1D framework (truss,
beam, columns) 2D finite element (plane stress, plane strain,
axisymmetric, plate or shell ele-
ments), chapter 13
3D finite element (solid elements)(c) Material Properties:
Linear Nonlinear
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
21/304
Draft1.3 Structural Idealization 13
(d) Sectional properties:
Constant Variable
(e) Structural connections:
Rigid Semi-flexible (linear and non-linear)(f) Structural
supports:
Rigid Elastic
3. Type of solution:
(a) Continuum, analytical, Partial Differential Equation
(b) Discrete, numerical, Finite ELement, Finite Difference,
Boundary Element
13 Structural design must satisfy:
1. Strength ( < f)
2. Stiffness (small deformations)
3. Stability (buckling, cracking)
14 Structural analysis must satisfy
1. Statics (equilibrium)
2. Mechanics (stress-strain or force displacement relations)
3. Kinematics (compatibility of displacement)
1.3 Structural Idealization
15 Prior to analysis, a structure must be idealized for a
suitable mathematical representation.Since it is practically
impossible (and most often unnecessary) to model every single
detail,assumptions must be made. Hence, structural idealization is
as much an art as a science. Someof the questions confronting the
analyst include:
1. Two dimensional versus three dimensional; Should we model a
single bay of a building,or the entire structure?
2. Frame or truss, can we neglect flexural stiffness?
3. Rigid or semi-rigid connections (most important in steel
structures)
4. Rigid supports or elastic foundations (are the foundations
over solid rock, or over claywhich may consolidate over time)
5. Include or not secondary members (such as diagonal braces in
a three dimensional anal-ysis).
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
22/304
Draft14 INTRODUCTION
6. Include or not axial deformation (can we neglect the axial
stiffness of a beam in a build-ing?)
7. Cross sectional properties (what is the moment of inertia of
a reinforced concrete beam?)
8. Neglect or not haunches (those are usually present in zones
of high negative moments)
9. Linear or nonlinear analysis (linear analysis can not predict
the peak or failure load, andwill underestimate the
deformations).
10. Small or large deformations (In the analysis of a high rise
building subjected to windload, the moments should be amplified by
the product of the axial load times the lateraldeformation, P
effects).
11. Time dependent effects (such as creep, which is extremely
important in prestressed con-crete, or cable stayed concrete
bridges).
12. Partial collapse or local yielding (would the failure of a
single element trigger the failureof the entire structure?).
13. Load static or dynamic (when should a dynamic analysis be
performed?).
14. Wind load (the lateral drift of a high rise building
subjected to wind load, is often themajor limitation to higher
structures).
15. Thermal load (can induce large displacements, specially when
a thermal gradient ispresent.).
16. Secondary stresses (caused by welding. Present in most
statically indeterminate struc-tures).
1.3.1 Structural Discretization
16 Once a structure has been idealized, it must be discretized
to lend itself for a mathematicalrepresentation which will be
analyzed by a computer program. This discretization shoulduniquely
define each node, and member.
17 The node is characterized by its nodal id (node number),
coordinates, boundary conditions,and load (this one is often
defined separately), Table 1.1. Note that in this case we have
two
Node No. Coor. B. C.X Y X Y Z
1 0. 0. 1 1 0
2 5. 5. 0 0 03 20. 5. 0 0 04 25. 2.5 1 1 1
Table 1.1: Example of Nodal Definition
nodal coordinates, and three degrees of freedom (to be defined
later) per node. Furthermore,
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
23/304
Draft1.3 Structural Idealization 15
a 0 and a 1 indicate unknown or known displacement. Known
displacements can be zero(restrained) or non-zero (as caused by
foundation settlement).
18 The element is characterized by the nodes which it connects,
and its group number, Table1.2.
Element From To GroupNo. Node Node Number
1 1 2 12 3 2 23 3 4 2
Table 1.2: Example of Element Definition
19 Group number will then define both element type, and
elastic/geometric properties. Thelast one is a pointer to a
separate array, Table 1.3. In this example element 1 has element
code
1 (such as beam element), while element 2 has a code 2 (such as
a truss element). Materialgroup 1 would have different
elastic/geometric properties than material group 2.
Group Element Material
No. Type Group
1 1 12 2 13 1 2
Table 1.3: Example of Group Number
20 From the analysis, we first obtain the nodal displacements,
and then the element internalforces. Those internal forces vary
according to the element type. For a two dimensional frame,those
are the axial and shear forces, and moment at each node.
21 Hence, the need to define two coordinate systems (one for the
entire structure, and one foreach element), and a sign convention
become apparent.
1.3.2 Coordinate Systems
22 We should differentiate between 2 coordinate systems:
Global: to describe the structure nodal coordinates. This system
can be arbitrarily selected
provided it is a Right Hand Side (RHS) one, and we will
associate with it upper case axislabels, X , Y , Z , Fig. 1.1 or
1,2,3 (running indeces within a computer program).
Local: system is associated with each element and is used to
describe the element internalforces. We will associate with it
lower case axis labels, x,y,z (or 1,2,3), Fig. 1.2.
23 The x-axis is assumed to be along the member, and the
direction is chosen such that it pointsfrom the 1st node to the 2nd
node, Fig. 1.2.
24 Two dimensional structures will be defined in the X-Y
plane.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
24/304
Draft16 INTRODUCTION
X X
Y
BEAM2D TRUSS
FRAME
X
Y
3D TRUSSGRID & FRAME
Z
Figure 1.1: Global Coordinate System
BEAM, TRUSS
x, 1x, 1
y, 2
z, 3
GRID, FRAME
Figure 1.2: Local Coordinate Systems
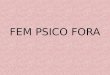
1.3.3 Sign Convention
25 The sign convention in structural analysis is completely
different than the one previouslyadopted in structural
analysis/design, Fig. 1.3 (where we focused mostly on flexure and
defineda positive moment as one causing tension below. This would
be awkward to program!).
26
In matrix structural analysis the sign convention adopted is
consistent with the prevailingcoordinate system. Hence, we define a
positive moment as one which is counter-clockwise, Fig.1.3
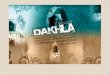
27 Fig. 1.4 illustrates the sign convention associated with each
type of element.
28 Fig. 1.4 also shows the geometric (upper left) and elastic
material (upper right) propertiesassociated with each type of
element.
1.4 Degrees of Freedom
29 A degree of freedom (d.o.f.) is an independent generalized
nodal displacement of a node.
30 The displacements must be linearly independent and thus not
related to each other. For
+-
+ve M
+ve M
Analysis Sign COnventionDesign Sign Convention (US)
Figure 1.3: Sign Convention, Design and Analysis
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
25/304
Draft1.4 Degrees of Freedom 17
I , Lx
v1
v 2 3 4
A, I , Lx
v2
3
1 4
v5
u1
u1
I , I , Lx y A, L A, I , I , I , Lx y z
u1 u 2
v2
v8
u1
E A, L EBeam 2D Truss 2D Frame E
6
u2
v3
4
5
6u
7
v9
10
11
12
E E EGrid 3D Truss 3D Frame
v2
v
u4
5
3 6
Figure 1.4: Total Degrees of Freedom for various Type of
Elements
Figure 1.5: Independent Displacements
example, a roller support on an inclined plane would have three
displacements (rotation , andtwo translations u and v), however
since the two displacements are kinematically constrained,we only
have two independent displacements, Fig. 1.5.
31 We note that we have been referring to generalized
displacements, because we want this termto include translations as
well as rotations. Depending on the type of structure, there maybe
none, one or more than one such displacement. It is unfortunate
that in most introductorycourses in structural analysis, too much
emphasis has been placed on two dimensional structures,and not
enough on either three dimensional ones, or two dimensional ones
with torsion.
32 In most cases, there is the same number of d.o.f in local
coordinates as in the global coordinate
system. One notable exception is the truss element. In local
coordinate we can only have oneaxial deformation, whereas in global
coordinates there are two or three translations in 2D and3D
respectively for each node.
33 Hence, it is essential that we understand the degrees of
freedom which can be associatedwith the various types of structures
made up of one dimensional rod elements, Table 1.4.
34 This table shows the degree of freedoms and the corresponding
generalized forces.
35 We should distinguish between local and global d.o.f.s. The
numbering scheme follows the
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
26/304
Draft18 INTRODUCTION
Type Node 1 Node 2 [k] [K]
(Local) (Global)
1 Dimensional
{p} Fy1, Mz2 Fy3, Mz4Beam 4 4 4 4
{} v1, 2 v3, 42 Dimensional{p} Fx1 Fx2
Truss 2 2 4 4{} u1 u2{p} Fx1, Fy2, Mz3 Fx4, Fy5, Mz6
Frame 6 6 6 6{} u1, v2, 3 u4, v5, 6{p} Tx1, Fy2, Mz3 Tx4, Fy5,
Mz6
Grid 6 6 6 6{} 1, v2, 3 4, v5, 6
3 Dimensional
{p}
Fx1, Fx2Truss 2 2 6 6
{} u1, u2{p} Fx1, Fy2, Fy3, Fx7, Fy8, Fy9,
Tx4 My5, Mz6 Tx10 My11, Mz12Frame 12 12 12 12
{} u1, v2, w3, u7, v8, w9,4, 5 6 10, 11 12
Table 1.4: Degrees of Freedom of Different Structure Types
Systems
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
27/304
Draft1.5 Course Organization 19
Figure 1.6: Examples of Global Degrees of Freedom
following simple rules:
Local: d.o.f. for a given element: Start with the first node,
number the local d.o.f. in the sameorder as the subscripts of the
relevant local coordinate system, and repeat for the
secondnode.
Global: d.o.f. for the entire structure: Starting with the 1st
node, number all the unrestrained
global d.o.f.s, and then move to the next one until all global
d.o.f have been numbered,Fig. 1.6.
1.5 Course Organization
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
28/304
Draft110 INTRODUCTION
Figure 1.7: Organization of the Course
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
29/304
Draft
Part I
Matrix Structural Analysis ofFramed Structures
-
7/27/2019 V, Saouma FEM I.pdf
30/304
Draft
-
7/27/2019 V, Saouma FEM I.pdf
31/304
Draft
Chapter 2
ELEMENT STIFFNESS MATRIX
2.1 Introduction
1 In this chapter, we shall derive the element stiffness matrix
[k] of various one dimensionalelements. Only after this important
step is well understood, we could expand the theory andintroduce
the structure stiffness matrix [K] in its global coordinate
system.
2 As will be seen later, there are two fundamentally different
approaches to derive the stiffnessmatrix of one dimensional
element. The first one, which will be used in this chapter, is
based onclassical methods of structural analysis (such as moment
area or virtual force method). Thus,in deriving the element
stiffness matrix, we will be reviewing concepts earlier seen.
3 The other approach, based on energy consideration through the
use of assumed shape func-tions, will be examined in chapter 12.
This second approach, exclusively used in the finiteelement method,
will also be extended to two and three dimensional continuum
elements.
2.2 Influence Coefficients
4 In structural analysis an influence coefficient Cij can be
defined as the effect on d.o.f. i due toa unit action at d.o.f. j
for an individual element or a whole structure. Examples of
InfluenceCoefficients are shown in Table 2.1.
Unit Action Effect on
Influence Line Load ShearInfluence Line Load MomentInfluence
Line Load Deflection
Flexibility Coefficient Load Displacement
Stiffness Coefficient Displacement Load
Table 2.1: Examples of Influence Coefficients
5 It should be recalled that influence lines are associated with
the analysis of structures sub-jected to moving loads (such as
bridges), and that the flexibility and stiffness coefficients
are
-
7/27/2019 V, Saouma FEM I.pdf
32/304
Draft22 ELEMENT STIFFNESS MATRIX
Figure 2.1: Example for Flexibility Method
components of matrices used in structural analysis.
2.3 Flexibility Matrix (Review)
6 Considering the simply supported beam shown in Fig. 2.1, and
using the local coordinatesystem, we have
12
=
d11 d12d21 d22
p1p2
(2.1)
Using the virtual work, or more specifically, the virtual force
method to analyze this problem,(more about energy methods in
Chapter 10), we have:l
0M
M
EIzdx
Internal
= P + M External
(2.2)
where M, MEIz , P and are the virtual internal force, real
internal displacement, virtualexternal load, and real external
displacement respectively. Here, both the external virtual forceand
moment are usualy taken as unity.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
33/304
Draft2.4 Stiffness Coefficients 23
Virtual Force:
U =
x x dvol
x =Mxy
I
x = xE = MyEIy2dA = I
dvol = dAdx
U = l0
MM
EIdx
W = PU = W
l0
MM
EIdx = P (2.3)
Hence:
EI 1M
d11
= L
0 1 xL2
MM
dx =L
3(2.4)
Similarly, we would obtain:
EI d22 =
L0
x
L
2dx =
L
3(2.5-a)
EI d12 =
L0
1 x
L
x
Ldx = L
6= EI d21 (2.5-b)
7 Those results can be summarized in a matrix form as:
[d] =L
6EIz
2 1
1 2
(2.6)
8 The flexibility method will be covered in more detailed, in
chapter 7.
2.4 Stiffness Coefficients
9 In the flexibility method, we have applied a unit force at a
time and determined all theinduced displacements in the statically
determinate structure.
10 In the stiffness method, we
1. Constrain all the degrees of freedom
2. Apply a unit displacement at each d.o.f. (while restraining
all others to be zero)
3. Determine the reactions associated with all the d.o.f.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
34/304
Draft24 ELEMENT STIFFNESS MATRIX
{p} = [k]{} (2.7)
11 Hence kij will correspond to the reaction at dof i due to a
unit deformation (translation orrotation) at dof j, Fig. 2.2.
12 The actual stiffness coefficients are shown in Fig. 2.3 for
truss, beam, and grid elements interms of elastic and geometric
properties.
13 In the next sections, we shall derive those stiffness
coefficients.
2.5 Force-Displacement Relations
2.5.1 Axial Deformations
14 From strength of materials, the force/displacement relation
in axial members is
= E AP
=AE
L1
(2.8)
Hence, for a unit displacement, the applied force should be
equal to AEL . From statics, the forceat the other end must be
equal and opposite.
2.5.2 Flexural Deformation
15 Our objective is to seek a relation for the shear and moments
at each end of a beam, in termsof known displacements and rotations
at each end.
V1 = V1(v1, 1, v2, 2) (2.9-a)
M1 = M1(v1, 1, v2, 2) (2.9-b)
V2 = V2(v1, 1, v2, 2) (2.9-c)
M2 = M2(v1, 1, v2, 2) (2.9-d)
16 We start from the differential equation of a beam, Fig. 2.4
in which we have all positiveknown displacements, we have from
strength of materials
M =
EI
d2v
dx2
= M1
V1x (2.10)
17 Integrating twice
EI v = M1x 12
V1x2 + C1 (2.11-a)
EI v = 12
M1x2 1
6V1x
3 + C1x + C2 (2.11-b)
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
35/304
Draft2.5 Force-Displacement Relations 25
Figure 2.2: Definition of Element Stiffness Coefficients
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
36/304
Draft26 ELEMENT STIFFNESS MATRIX
Figure 2.3: Stiffness Coefficients for One Dimensional
Elements
V
M
M
Vvv
1
1
1
12
2 2
2
Figure 2.4: Flexural Problem Formulation
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
37/304
Draft2.5 Force-Displacement Relations 27
18 Applying the boundary conditions at x = 0
v = 1v = v1
C1 = EI 1C2 = EI v1 (2.12)
19 Applying the boundary conditions at x = L and combining with
the expressions for C1 andC2
v = 2v = v2
EI 2 = M1L 12 V1L2 EI 1EI v2 = 12 M1L2 16 V1L3 EI 1L EI v1
(2.13)
20 Since equilibrium of forces and moments must be satisfied, we
have:
V1 + V2 = 0 M1 V1L + M2 = 0 (2.14)
or
V1 =(M1 + M2)
LV2 = V1 (2.15)
21 Substituting V1 into the expressions for 2 and v2 in Eq. 2.13
and rearrangingM1 M2 = 2EIzL 1 2EIzL 2
2M1 M2 = 6EIzL 1 + 6EIzL2 v1 6EIzL2 v2(2.16)
22 Solving those two equations, we obtain:
M1 =2EIz
L(21 + 2) +
6EIzL2
(v1 v2) (2.17)
M2 =2EIz
L(1 + 22) +
6EIzL2
(v1 v2) (2.18)
23 Finally, we can substitute those expressions in Eq. 2.15
V1 =6EIz
L2(1 + 2) +
12EIzL3
(v1 v2) (2.19)
V2 = 6EIzL2
(1 + 2) 12EIzL3
(v1 v2) (2.20)
2.5.3 Torsional Deformations
24 From Fig. 2.2-d. Since torsional effects are seldom covered
in basic structural analysis, andstudents may have forgotten the
derivation of the basic equations from the Strength of
Materialcourse, we shall briefly review them.
25 Assuming a linear elastic material, and a linear strain (and
thus stress) distribution alongthe radius of a circular cross
section subjected to torsional load, Fig. 2.5 we have:
T =
A
cmax
stress
dAarea
Force
arm
torque
(2.21-a)
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
38/304
Draft28 ELEMENT STIFFNESS MATRIX
Figure 2.5: Torsion Rotation Relations
=max
c
A
2dA J
(2.21-b)
max =T c
J(2.21-c)
Note the analogy of this last equation with = McIz .
26
A
2dA is the polar moment of inertia J. It is also referred to as
the St. Venants torsion
constant. For circular cross sections
J =
A
2dA =
c0
2 (2d)
=c4
2=
d4
32(2.22-a)
For rectangular sections b d, and b < d, an approximate
expression is given by
J = kb3
d (2.23-a)
k =0.3
1 +
bd
2 (2.23-b)For other sections, J is often tabulated.
27 Note that J corresponds to Ixx where x is the axis along the
element.
28 Having developed a relation between torsion and shear stress,
we now seek a relation betweentorsion and torsional rotation. In
Fig. 2.5, we consider the arc length BD
maxdx = dc
d
dx= maxc
max = maxG d
dx= maxGc
max = T CJ d
dx
=T
GJ
(2.24)
29 Finally, we can rewrite this last equation as
Tdx =
Gjd and obtain:
T =GJ
L (2.25)
Note the similarity between this equation and Equation 2.8.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
39/304
Draft2.5 Force-Displacement Relations 29
dvs
y
xdx
dy
Figure 2.6: Deformation of an Infinitesimal Element Due to
Shear
2.5.4 Shear Deformation
30 In general, shear deformations are quite small. However, for
beams with low span to depthratio, those deformations can not be
neglected.
31 Considering an infinitesimal element subjected to shear, Fig.
2.6 and for linear elastic ma-terial, the shear strain (assuming
small displacement, i.e. tan ) is given by
tan = dvsdx
Kinematics
=
GMaterial
(2.26)
where dvs
dxis the slope of the beam neutral axis from the horizontal
while the vertical sections
remain undeformed, G is the shear modulus, the shear stress, and
vs the shear induceddisplacement.
32 Along a beam cross section, the shear stress is not constant.
For example for rectangularsections, it varies parabolically, and
in I sections, the flange shear components can be neglected.
=V Q
Ib(2.27)
where V is the shear force, Q is the first moment (or static
moment) about the neutral axis ofthe portion of the cross-sectional
area which is outside of the section where the shear stress isto be
determined, I is the moment of inertia of the cross sectional area
about the neutral axis,
and b is the width of the rectangular beam.33 The preceding
equation can be simplified as
=V
As(2.28)
where As is the effective cross section for shear (which is the
ratio of the cross sectional areato the area shear factor)
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
40/304
Draft210 ELEMENT STIFFNESS MATRIX
34 Let us derive the expression of As for rectangular sections.
The exact expression for theshear stress is
=V Q
Ib(2.29)
where Q is the moment of the area from the external fibers to y
with respect to the neutral
axis; For a rectangular section, this yields
=V Q
Ib(2.30-a)
=V
Ib
h/2y
bydy =V
2I
h2
4 y2
(2.30-b)
=6V
bh3
h2
4 y2
(2.30-c)
and we observe that the shear stress is zero for y = h/2 and
maximum at the neutral axiswhere it is equal to 1.5 Vbh .
35 To determine the form factor of a rectangular section such
that As = A (clarify)
= V QIb= k VA
Q =
h/2y
bydy =b
2
h2
4 y2
k = QAIb =A2I
h2
4 y2
bhA
=
A
k2dydz
= 1.2 (2.31)Thus, the form factor may be taken as 1.2 for
rectangular beams of ordinary proportions,
and As = 1.2AFor I beams, k can be also approximated by 1.2,
provided A is the area of the web.
36 Combining Eq. 2.26 and 2.28 we obtain
dvsdx
= VGAs
(2.32)
Assuming V to be constant, we integrate
vs =V
GAsx + C1 (2.33)
37 If the displacement vs is zero at the opposite end of the
beam, then we solve for C1 andobtain
vs = VGAs
(x L) (2.34)
38 We define
def=
12EI
GAsL2(2.35)
= 24(1 + )A
As
r
L
2(2.36)
Hence for small slenderness ratio rL compared to unity, we can
neglect .
39 Next, we shall consider the effect of shear deformations on
both translations and rotations
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
41/304
Draft2.6 Putting it All Together, [k] 211
1
6EI
6EI
12EI
12EI
L2
L2
L3
L3
Figure 2.7: Effect of Flexure and Shear Deformation on
Translation at One End
Effect on Translation Due to a unit vertical translation, the
end shear force is obtained fromEq. 2.19 and setting v1 = 1 and 1 =
2 = v2 = 0, or V =
12EIzL3 . At x = 0 we have, Fig.
2.7, and Eq. 2.34vs =
V LGAs
= V
V = 12EIzL3 = 12EIGAsL2
vs = (2.37)Hence, the shear deformation has increased the total
translation from 1 to 1+. Similar
arguments apply to the translation at the other end.
Effect on Rotation Considering the beam shown in Fig. 2.8, even
when a rotation 1 isapplied, an internal shear force is induced,
and this in turn is going to give rise to shear
deformations (translation) which must be accounted for. The
shear force is obtained fromEq. 2.19 and setting 1 = 1 and 2 = v1 =
v2 = 0, or V =
6EIzL2 . At x = 0,
vs =V L
GAsV = 6EIzL2 = 12EIGAsL2
vs = 0.5L (2.38)in other words, the shear deformation has moved
the end of the beam (which was supposedto have zero translation) by
0.5L.
2.6 Putting it All Together, [k]
40 Using basic structural analysis methods we have derived
various force displacement relationsfor axial, flexural, torsional
and shear imposed displacements. At this point, and keeping inmind
the definition of degrees of freedom, we seek to assemble the
individual element stiffnessmatrices [k]. We shall start with the
simplest one, the truss element, then consider the beam,2D frame,
grid, and finally the 3D frame element.
41 In each case, a table will cross-reference the force
displacement relations, and then the elementstiffness matrix will
be accordingly defined.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
42/304
Draft212 ELEMENT STIFFNESS MATRIX
4EI2EI
6EI
6EI
LL
L2
L2
0.5L1
0.5L1
1
1=1
Figure 2.8: Effect of Flexure and Shear Deformation on Rotation
at One End
X
Y
Beam Element
X
Y
Z
Frame Element
X
Z
Y
Grid Element
Figure 2.9: Coordinate System for Element Stiffness Matrices
42 Fig. 2.9 illustrates the coordinate syatems used for the
element stiffness matrix definitionsin this section.
2.6.1 Truss Element
43 The truss element (whether in 2D or 3D) has only one degree
of freedom associated witheach node. Hence, from Eq. 2.8, we
have
[kt] =AE
L
u1 u2p1 1 1p2 1 1 (2.39)
2.6.2 Beam Element
44 There are two major beam theories:
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
43/304
Draft2.6 Putting it All Together, [k] 213
Euler-Bernoulli which is the classical formulation for
beams.
Timoshenko which accounts for transverse shear deformation
effects.
2.6.2.1 Euler-Bernoulli
45 Using Equations 2.17, 2.18, 2.19 and 2.20 we can determine
the forces associated with eachunit displacement.
[kb] =
v1 1 v2 2
V1 Eq. 2.19(v1 = 1) Eq. 2.19(1 = 1) Eq. 2.19(v2 = 1) Eq. 2.19(2
= 1)M1 Eq. 2.17(v1 = 1) Eq. 2.17(1 = 1) Eq. 2.17(v2 = 1) Eq. 2.17(2
= 1)V2 Eq. 2.20(v1 = 1) Eq. 2.20(1 = 1) Eq. 2.20(v2 = 1) Eq. 2.20(2
= 1)M2 Eq. 2.18(v1 = 1) Eq. 2.18(1 = 1) Eq. 2.18(v2 = 1) Eq. 2.18(2
= 1)
(2.40)
46 The stiffness matrix of the beam element (neglecting shear
and axial deformation) will thus
be
[kb] =
v1 1 v2 2V1
12EIzL3
6EIzL2 12EIzL3 6EIzL2
M16EIz
L24EIz
L 6EIzL2 2EIzLV2 12EIzL3 6EIzL2 12EIzL3 6EIzL2M2
6EIzL2
2EIzL 6EIzL2 4EIzL
(2.41)
2.6.2.2 Timoshenko Beam
47 If shear deformations are present, we need to alter the
stiffness matrix given in Eq. 2.41 in
the following manner
1. Due to translation, we must divide (or normalize) the
coefficients of the first and thirdcolumns of the stiffness matrix
by 1 + so that the net translation at both ends is unity.
2. Due to rotation and the effect of shear deformation
(a) The forces induced at the ends due to a unit rotation at end
1 (second column)neglecting shear deformations are
V1 = V2 = 6EIL2
(2.42-a)
M1 = 4EIL (2.42-b)
M2 =2EI
L(2.42-c)
(b) There is a net positive translation of 0.5L at end 1 when we
applied a unit rotation(this parasitic translation is caused by the
shear deformation) but no additionalforces are induced.
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
44/304
Draft214 ELEMENT STIFFNESS MATRIX
(c) When we apply a unit rotation, all other displacements
should be zero. Hence,we should counteract this parasitic shear
deformation by an equal and oppositeone. Hence, we apply an
additional vertical displacement of 0.5L and the forcesinduced at
the ends (first column) are given by
V1 = V2 =12EI
L31
1 + kbt11
(0.5L) vs
(2.43-a)
M1 = M2 =6EI
L21
1 + kbt21
(0.5L) vs
(2.43-b)
Note that the denominators have already been divided by 1 + in
kbt.
(d) Summing up all the forces, we have the forces induced as a
result of a unit rotationonly when the effects of both bending and
shear deformations are included.
V1 = V2 = 6EIL2
Due to Unit Rotation
+ 12EIL3
11 +
kbt11
(0.5L) vs
Due to Parasitic Shear
(2.44-a)
= 6EIL2
1
1 + (2.44-b)
M1 =4EI
L Due to Unit Rotation
+6EI
L21
1 + kbt21
(0.5L) vs
Due to Parasitic Shear
(2.44-c)
=4 +
1 +
EI
L (2.44-d)
M2 =2EI
L Due to Unit Rotation
+6EI
L21
1 + kbt21
(0.5L) vs
Due to Parasitic Shear
(2.44-e)
=2 1 +
EI
L(2.44-f)
48 Thus, the element stiffness matrix given in Eq. 2.41
becomes
[kbV] =
v1 1 v2 2V1
12EIzL3(1+y)
6EIzL2(1+y)
12EIzL3(1+y) 6EIzL2(1+y)M1
6EIzL2(1+y)
(4+y)EIz(1+y)L
6EIzL2(1+y)(2y)EIz
L(1+y)
V2 12EIzL3(1+y) 6EIzL2(1+y) 12EIzL3(1+y) 6EIzL2(1+y)M2
6EIzL2(1+y)
(2y)EIzL(1+y)
6EIzL2(1+y)(4+y)EIz
L(1+y)
(2.45)
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
45/304
Draft2.6 Putting it All Together, [k] 215
2.6.3 2D Frame Element
49 The stiffness matrix of the two dimensional frame element is
composed of terms from thetruss and beam elements where kb and kt
refer to the beam and truss element stiffness
matricesrespectively.
[k2df r] =
u1x v1y 1z u2x v2y 2zP1x k
t11 0 0 k
t12 0 0
V1y 0 kb11 k
b12 0 k
b13 k
b14
M1z 0 kb21 k
b22 0 k
b23 k
b24
P2x kt21 0 0 k
t22 0 0
V2y 0 kb31 k
b32 0 k
b33 k
b34
M2z 0 kb41 k
b42 0 k
b43 k
b44
(2.46)
Thus, we have:
[k2df r] =
u1x v1y 1z u2x v2y 2z
P1xEA
L 0 0 EA
L 0 0V1y 0
12EIzL3
6EIzL2 0 12EIzL3 6EIzL2
M1z 06EIz
L24EIz
L 0 6EIzL2 2EIzLP2x EAL 0 0 EAL 0 0V2y 0 12EIzL3 6EIzL2 0
12EIzL3 6EIL2M2z 0
6EIzL2
2EIzL 0 6EIzL2 4EIzL
(2.47)
50 Note that if shear deformations must be accounted for, the
entries corresponding to shearand flexure must be modified in
accordance with Eq. 2.45
2.6.4 Grid Element
51 The stiffness matrix of the grid element is very analogous to
the one of the 2D frame element,except that the axial component is
replaced by the torsional one. Hence, the stiffness matrix is
[kg] =
1x u1y 1z 2x u2y 2z
T1x Eq. 2.25 0 0 Eq. 2.25 0 0V1y 0 k
b11 k
b12 0 k
b13 k
b14
M1z 0 kb21 k
b22 0 k
b23 k
b24
T2x Eq. 2.25 0 0 Eq. 2.25 0 0V2y 0 k
b31 k
b32 0 k
b33 k
b34
M2z 0 kb
41 kb
42 0 kb
43 kb
44
(2.48)
Victor Saouma Finite Element I; Framed Structures
-
7/27/2019 V, Saouma FEM I.pdf
46/304
Draft216 ELEMENT STIFFNESS MATRIX
Upon substitution, the grid element stiffness matrix is given
by
[kg] =
1x u1y 1z 2x u2y 2zT1x
GIxL 0 0 GIxL 0 0
V1y
0 12EIzL3
6EIz
L20
12EIz
L3
6EIz
L2M1z 06EIz
L24EIz
L 0 6EIzL2 2EIzLT2x GixL 0 0 GIxL 0 0V2y 0 12EIzL3 6EIzL2 0
12EIzL3 6EIzL2M2z 0
6EIzL2
2EIzL3 0 6EIzL2 4EIzL
(2.49)
52 Note that if shear deformations must be accounted for, the
entries corresponding to shearand flexure must be modified in
accordance with Eq. 2.45
2.6.5 3D Frame Element
[k3df r] =
u1 v1 w1 x1 y1 z1 u2 v2 w2 x2 y2 z2
Px1 kt11 0 0 0 0 0 k
t21 0 0 0 0 0
Vy1 0 kb11 0 0 0 k
b12 0 k
b13 0 0 0 k
b14V z1 0 0 kb11 0 kb12 0 0 0 kb13 0 kb14 0Tx1 0 0 0 k
g11 0 0 0 0 0 k
g12 0 0
My1 0 0 kb32 0 k
b22 0 0 0 k
b12 0 k
b24 0
Mz1 0 kb21 0 0 0 k
b22 0 kb12 0 0 0 kb24
Px2 kt21 0 0 0 0 0 k
t22 0 0 0