Embed Size (px)
Citation preview
Préparé Par S.C.
Université libanaise – faculté
de génie II
S.C. ULFG2-2009
2
Introduction:
Ce projet a pour but l'étude de la commande d'une machine a courant
continu a vitesse variable.
L'alimentation de cette machine, sera à travers un pont redresseur commandé qui fournira à cette machine un courant continu.
Nous cherchons dans ce travail à asservir deux paramètres de la machine:
le courant absorbé qui ne doit pas dépasser en aucun cas le courant maximale supporte par la machine; ainsi que la vitesse de rotation qu'on cherche à varier.
Dans ce but là; ce projet comportera trois parties principales:
1- Choix et modélisation de la machine
2- Modélisation du convertisseur utilisé (pont redresseur a thyristors) 3- Correction du système asservi.
I- Choix et modélisation de la machine a courant
continu.
1- Modélisation et schéma bloc. La commande de cette machine est effectuée à travers la variation
de la tension d'induit; le flux inducteur est donc considéré constant égale au flux maximal.
- Machine fonctionnant a vide:
Deux équations fondamentales régissent le fonctionnement d'une
machine à courant continu:
S.C. ULFG2-2009
3
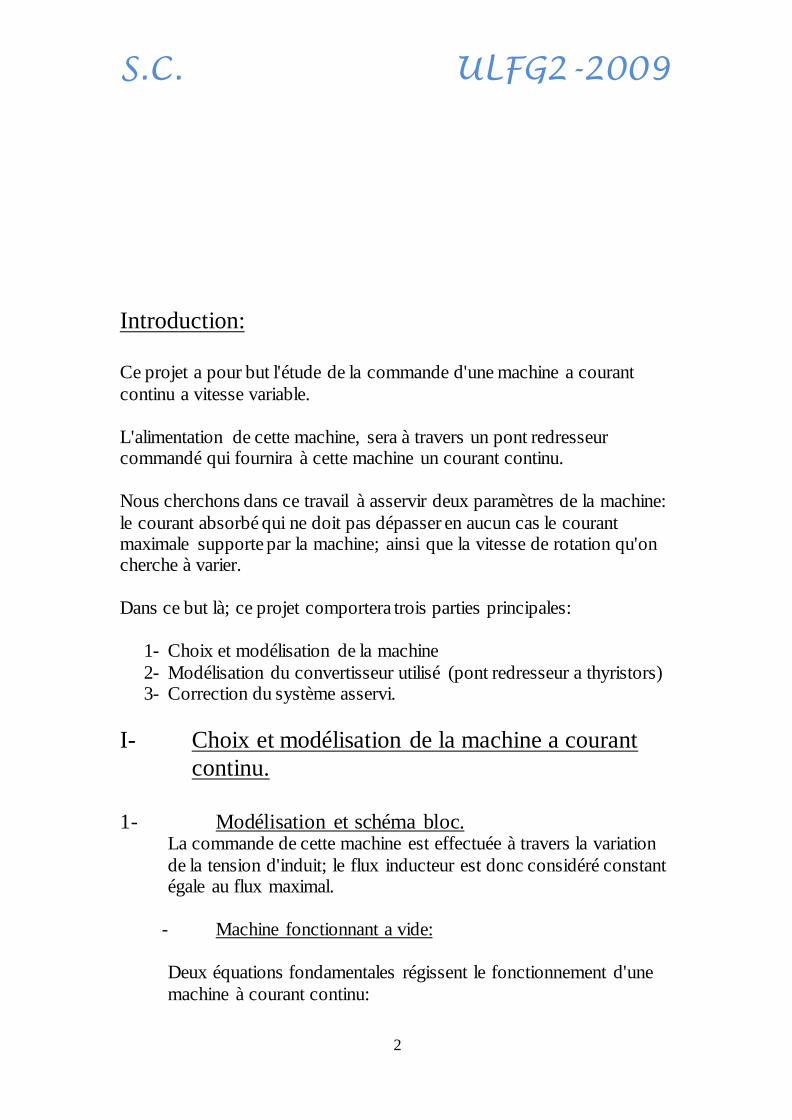
Soit E la force électromotrice à vide; Ω la vitesse de rotation du rotor; Ce le couple électromagnétique développé par la machine; et
Ia le courant circulant dans l'induit.
Ia .k Ce
.k E
max
max Avec cte
maxmax k k
La tension Va aux bornes de l'induit serait:
dt
dILIREV a
aaaa
Appliquons la transformée de Laplace sur ces équations:
)()().()(
)(.)(
)(.)(
max
max
pEpIpLRpV
pIkpC
pkpE
aaaa
ae
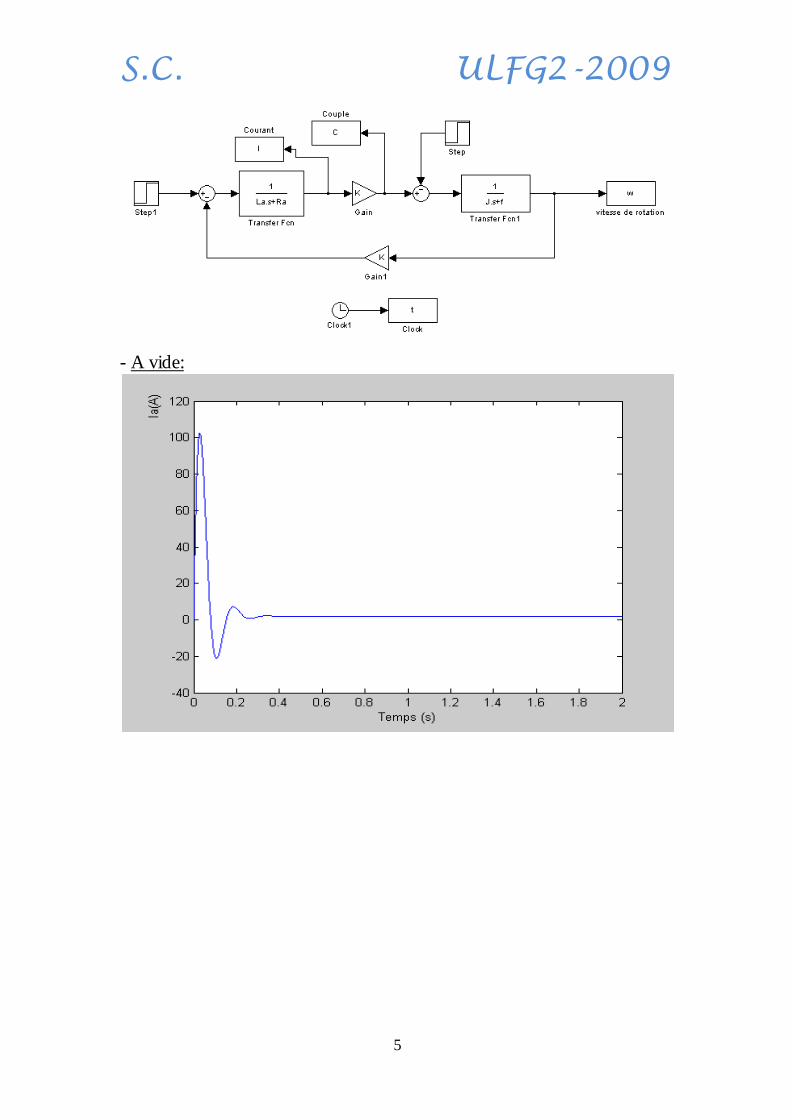
D’où le schéma bloc de la machine a courant continu a vide
commande par la tension d'induit
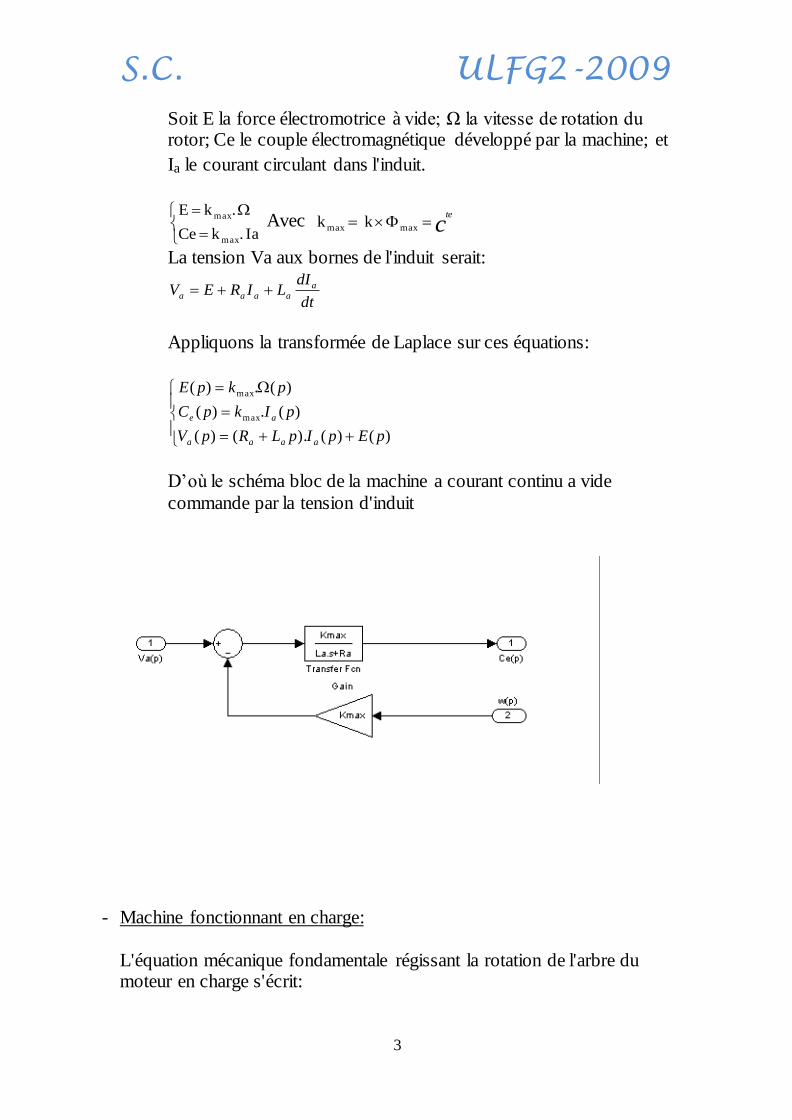
- Machine fonctionnant en charge:
L'équation mécanique fondamentale régissant la rotation de l'arbre du moteur en charge s'écrit:
S.C. ULFG2-2009
4
dt
dJCCe tresis tan
Avec CrfC tresis .tan
Ou :
f est le coefficient de frottement fluides de l'ensemble moteur + charge J est le moment d'inertie de l'ensemble moteur + charge
- Schéma bloc final:
Le schéma bloc fonctionnel du moteur a courant continu pilote par tension d'induit est le suivant:
2- Simulation du modèle de la machine sur Matlab-Simulink
Pour simuler le modèle de la machine nous allons appliquer comme entrée du système une tension en échelon et visualiser comme sortie la
vitesse de rotation ainsi que le couple fourni par la machine et le courant absorbe. Les caractéristiques de la machine choisie sont: - Tension d'alimentation nominale: Un=260V
- Vitesse de rotation nominale: Nn=2150 tr/min= 225 rad/s - Résistance d'induit: Ra=1.26 Ω
- Inductance d'induit: La=34 mH - Couple nominal fourni par la machine en charge: Cn=14 N.m
- Courant nominal absorbe Ian=13.5 A - Coefficient de frottement visqueux f = 0.01
- Moment d'inertie du rotor J = 0.02 kg.m2
S.C. ULFG2-2009
5
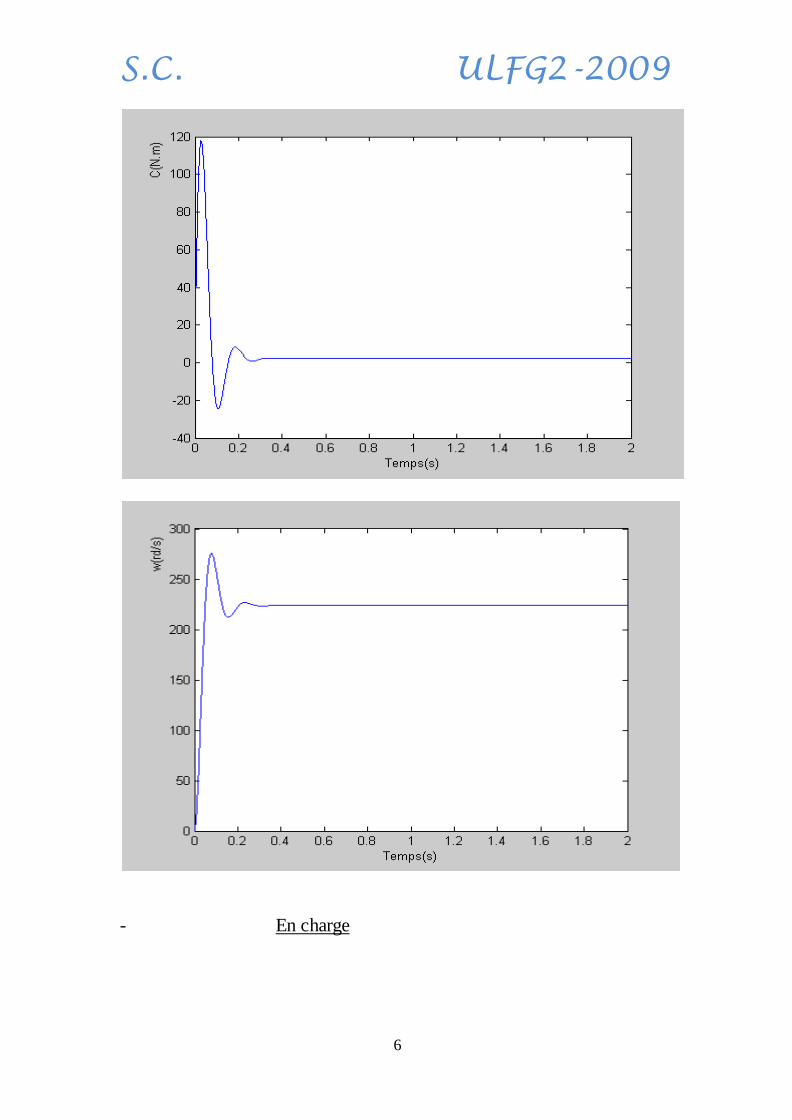
- A vide:
S.C. ULFG2-2009
6
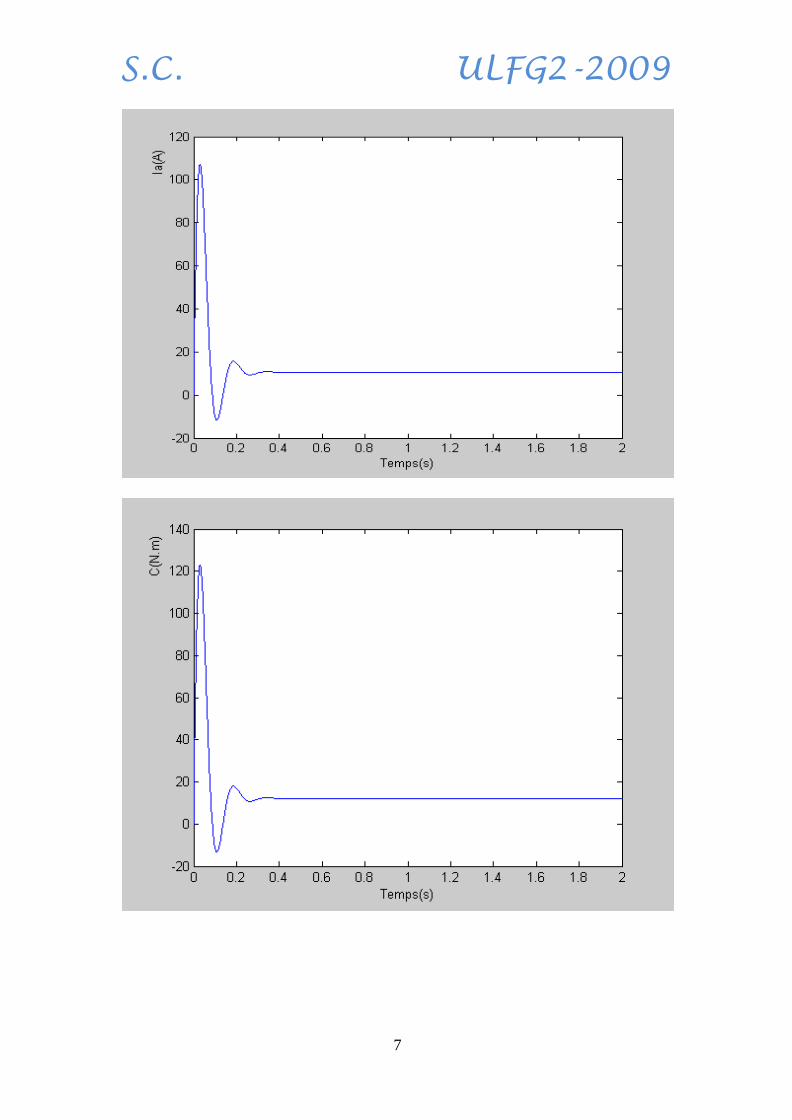
- En charge
S.C. ULFG2-2009
7
S.C. ULFG2-2009
8
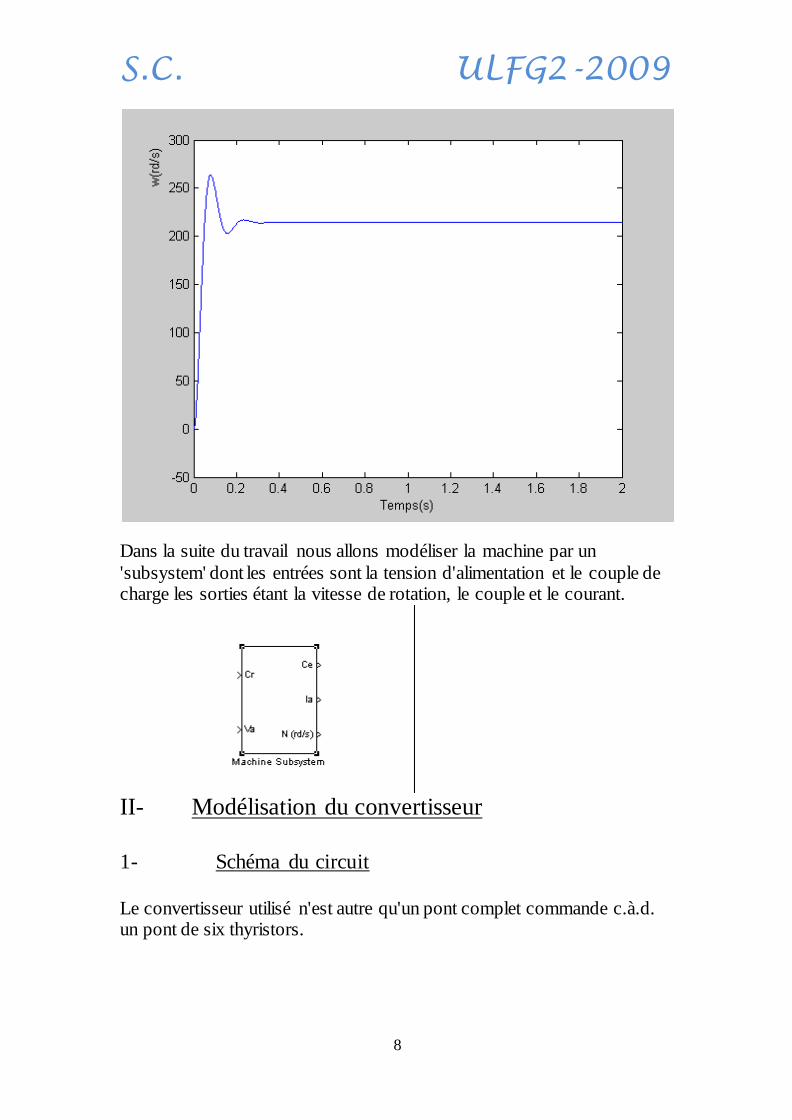
Dans la suite du travail nous allons modéliser la machine par un
'subsystem' dont les entrées sont la tension d'alimentation et le couple de charge les sorties étant la vitesse de rotation, le couple et le courant.
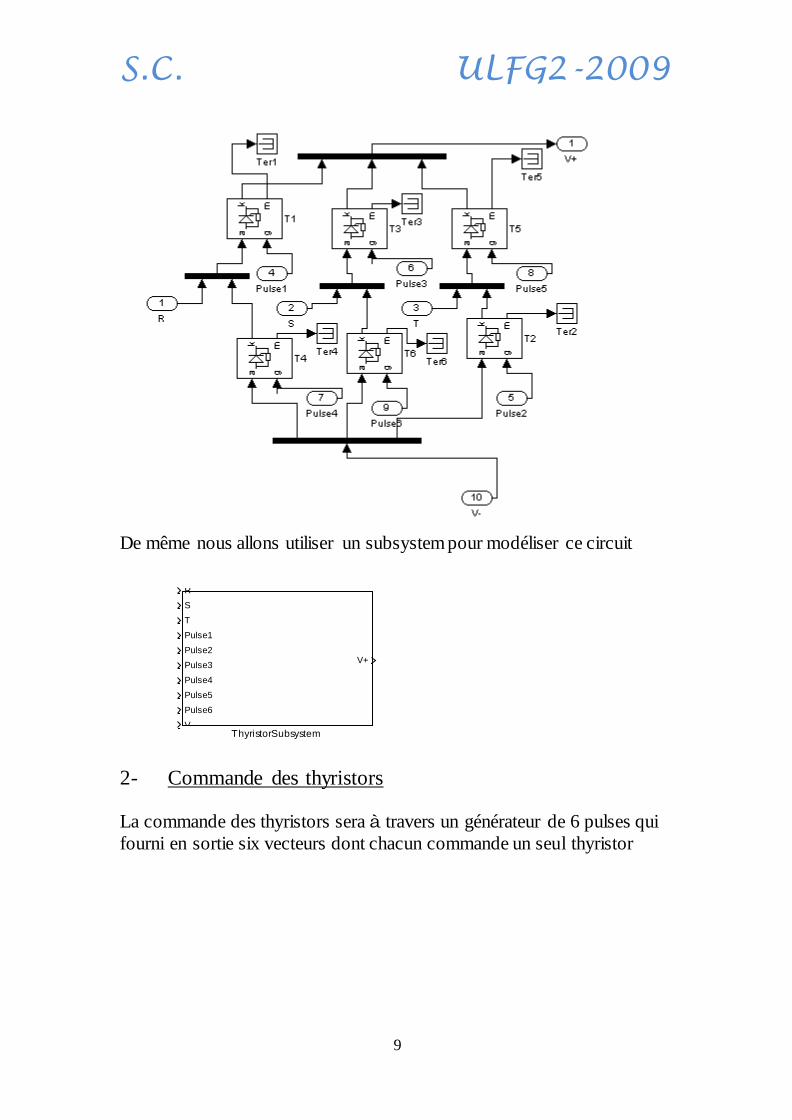
II- Modélisation du convertisseur
1- Schéma du circuit
Le convertisseur utilisé n'est autre qu'un pont complet commande c.à.d. un pont de six thyristors.
S.C. ULFG2-2009
9
De même nous allons utiliser un subsystem pour modéliser ce circuit
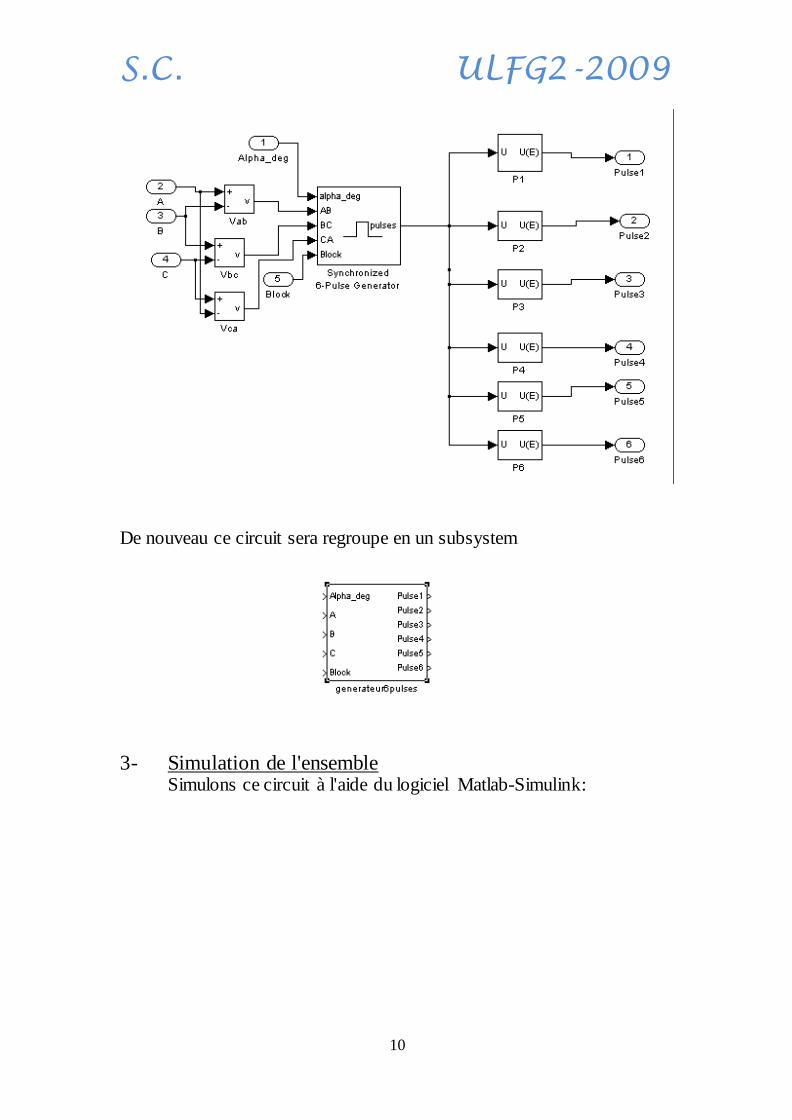
2- Commande des thyristors
La commande des thyristors sera à travers un générateur de 6 pulses qui
fourni en sortie six vecteurs dont chacun commande un seul thyristor
R
S
T
Pulse1
Pulse2
Pulse3
Pulse4
Pulse5
Pulse6
V-
V+
ThyristorSubsystem
S.C. ULFG2-2009
10
De nouveau ce circuit sera regroupe en un subsystem
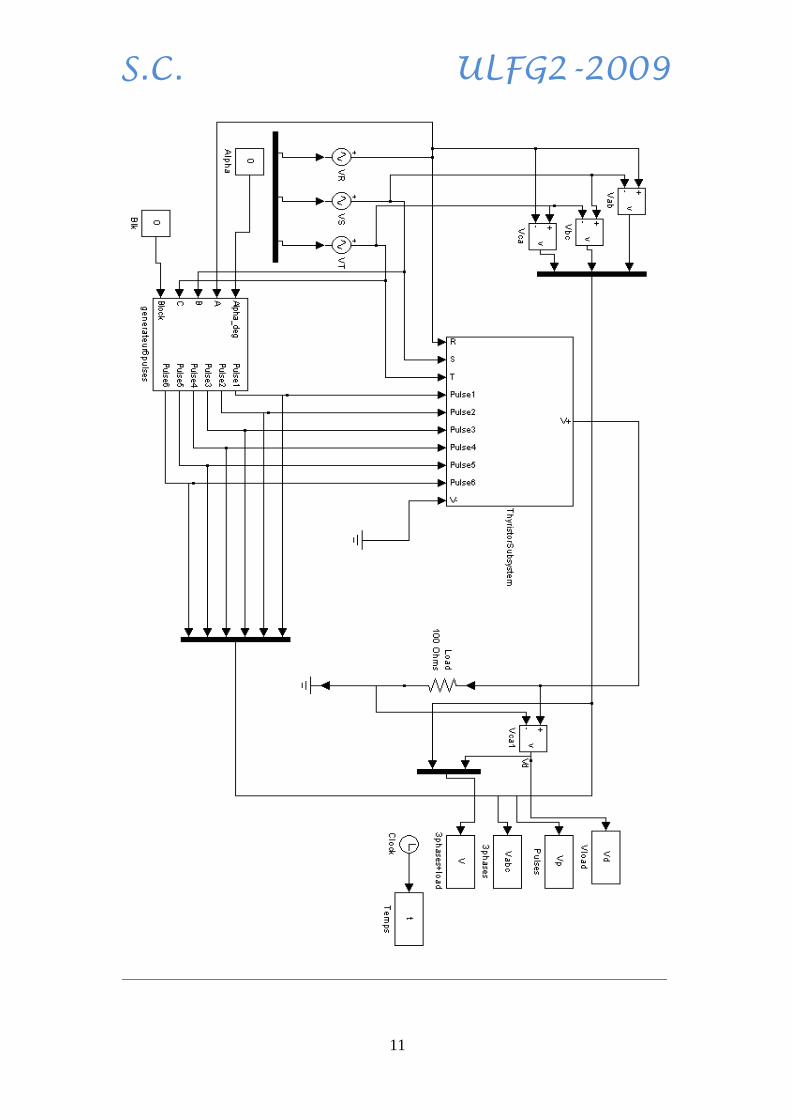
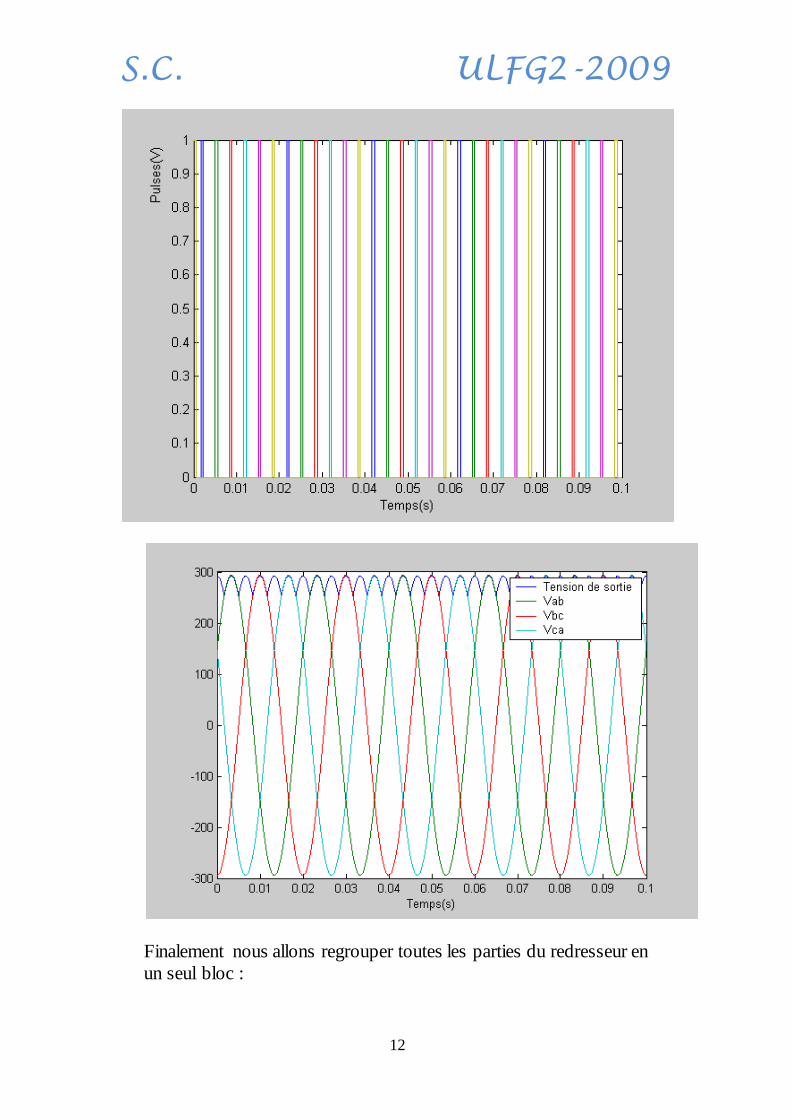
3- Simulation de l'ensemble Simulons ce circuit à l'aide du logiciel Matlab-Simulink:
S.C. ULFG2-2009
11
S.C. ULFG2-2009
12
Finalement nous allons regrouper toutes les parties du redresseur en
un seul bloc :
S.C. ULFG2-2009
13
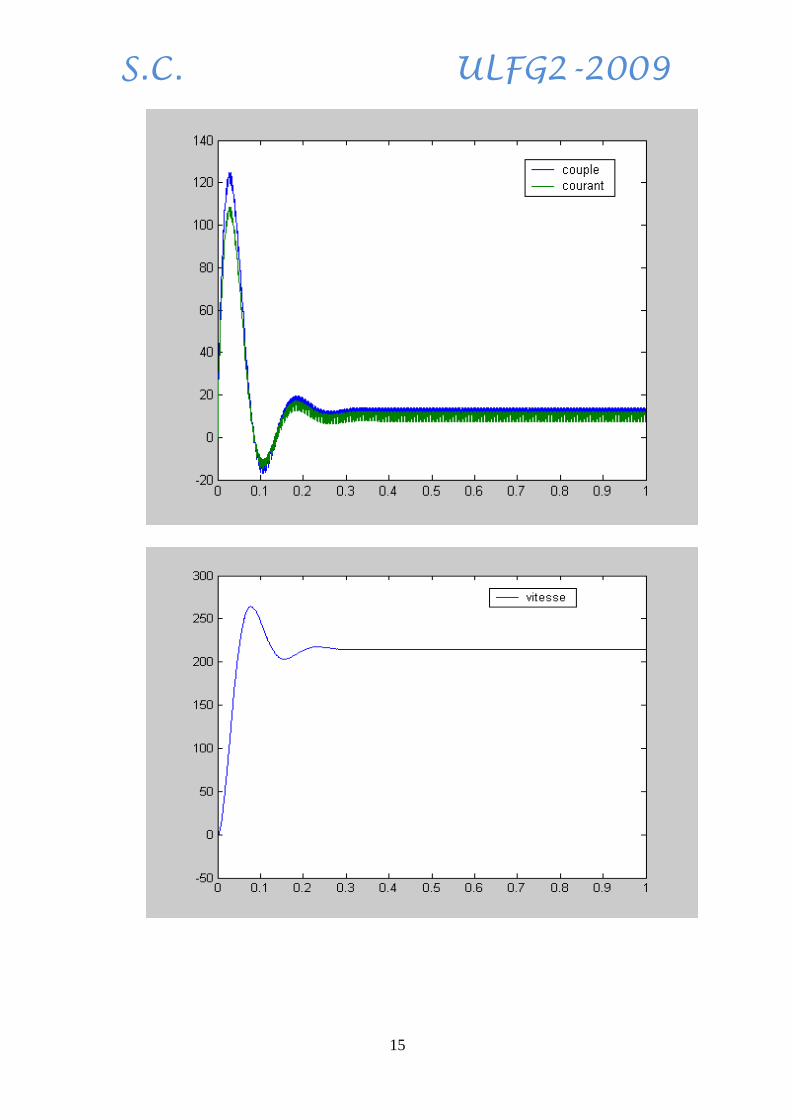
4- Simulation du système complet (machine et convertisseur) Pour mieux clarifier les idées nous allons utiliser ce bloc pour alimenter
la machine à courant continu et simuler notre système sans correction
Alpha_deg
R
S
T
V-
V+
mes_pulses
TriggeredPontThyristor

S.C. ULFG2-2009
14
S.C. ULFG2-2009
15
S.C. ULFG2-2009
16
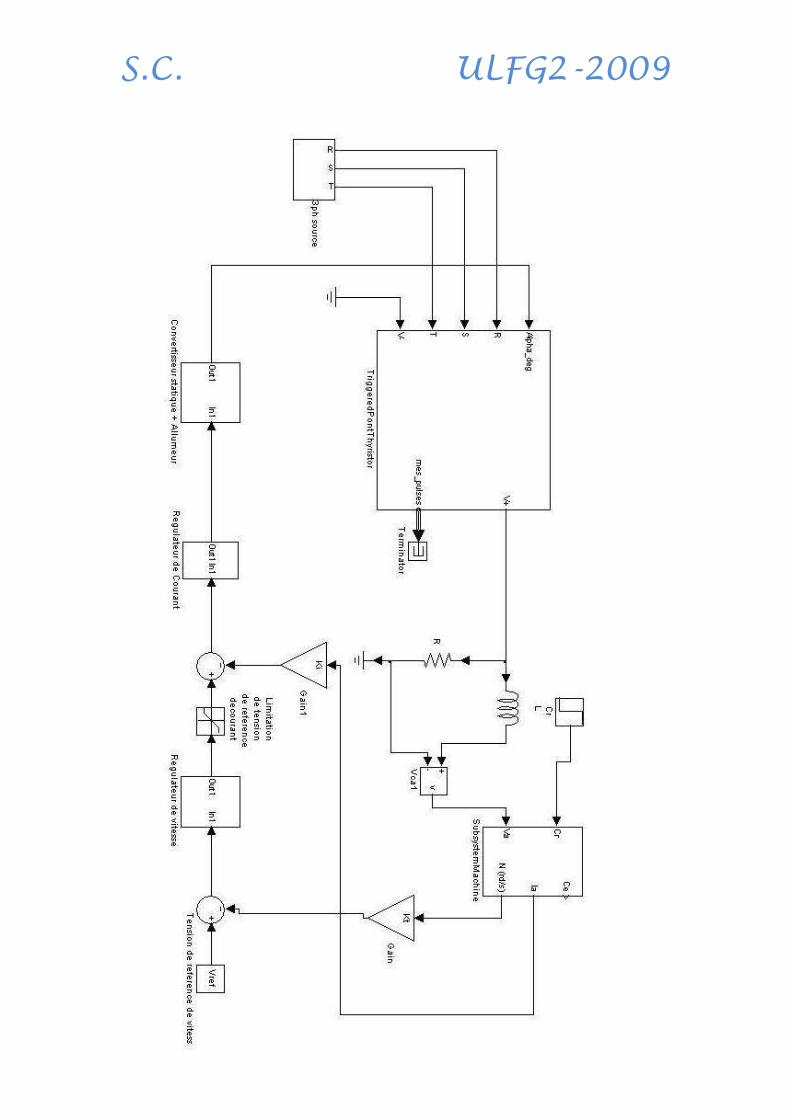
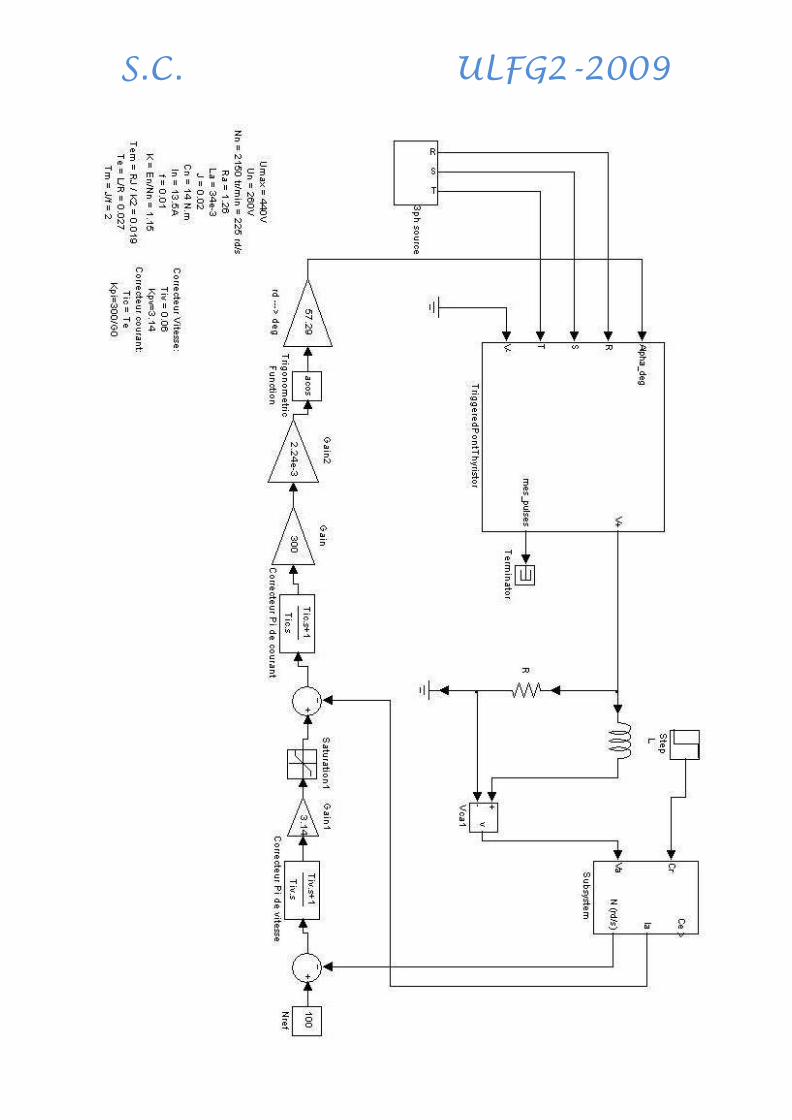
III- Correction du système
1- Structure de la correction
La correction utilisée est une correction en cascade; les deux
grandeurs corrigées sont le courant et la vitesse de rotation du moteur le système corrigé aura la forme suivante:
S.C. ULFG2-2009
17
S.C. ULFG2-2009
18
Cahier de charge : Boucle de courant :
tm=0.35ms
εs <4%
D%<10% Boucle de Vitesse :
tm=0.2s
εs =0
D%<15%
Régulateurs : Remarque : Lors de l'alimentation de l'inducteur d’une machine à courant continu, les convertisseurs généralement utilisés sont de type hacheur ou
pont à thyristors. Ils sont généralement assimilés en première approche à un gain constant. On dit alors qu'on utilise un modèle à valeur moyenne
instantanée, c'est-à-dire que l'on assimile la tension de sortie sur une période de fonctionnement du convertisseur à sa valeur moyenne. Un tel
type de modélisation est satisfaisant si le circuit alimenté par cette source de tension présente une constante de temps relativement grande devant la période de fonctionnement du convertisseur. Dans le cas contraire, il faut
rechercher une modélisation rendant compte du fonctionnement échantillonné du convertisseur, ainsi que des retards pouvant être
introduit par le mode de commande.
Le principe du réglage est le suivant: 1- Introduction d'un correcteur proportionnel. C1(p) K
2- Réglage de K (temps de réponse, dépassement, marge de phase...)
3- Introduction d'un correcteur Proportionnel intégrale. C(p) =1+τp
τp
4- Réglage de 1/τ à une valeur << c où c représente la pulsation de
coupure en boucle ouverte du système avec la correction proportionnelle.
Note : il est possible de prendre une valeur de 1/τ inférieur à
c/10, mais la vitesse d'intégration est alors plus lente, et on
obtient une réponse du type:
S.C. ULFG2-2009
19
Remarque : Il est alors plus simple de traiter l’asservissement comme un système à retour unitaire, puis de prendre en compte dans un deuxième
temps le gain du capteur.
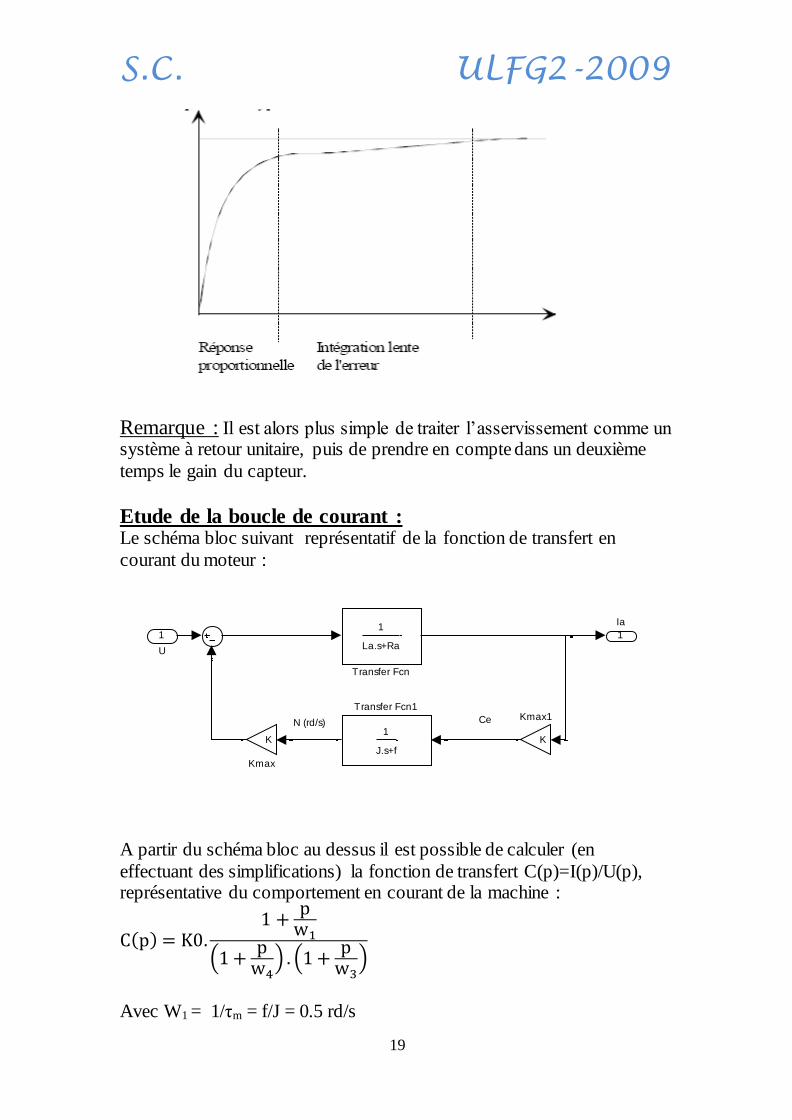
Etude de la boucle de courant : Le schéma bloc suivant représentatif de la fonction de transfert en
courant du moteur :
A partir du schéma bloc au dessus il est possible de calculer (en
effectuant des simplifications) la fonction de transfert C(p)=I(p)/U(p), représentative du comportement en courant de la machine :
C(p) = K0.1 +
pw1
(1 +p
w4) . (1 +
pw3
)
Avec W1 = 1/τm = f/J = 0.5 rd/s
CeN (rd/s)
1
Ia
1
J.s+f
Transfer Fcn1
1
La.s+Ra
Transfer Fcn
K
Kmax1
K
Kmax
1
U
S.C. ULFG2-2009
20
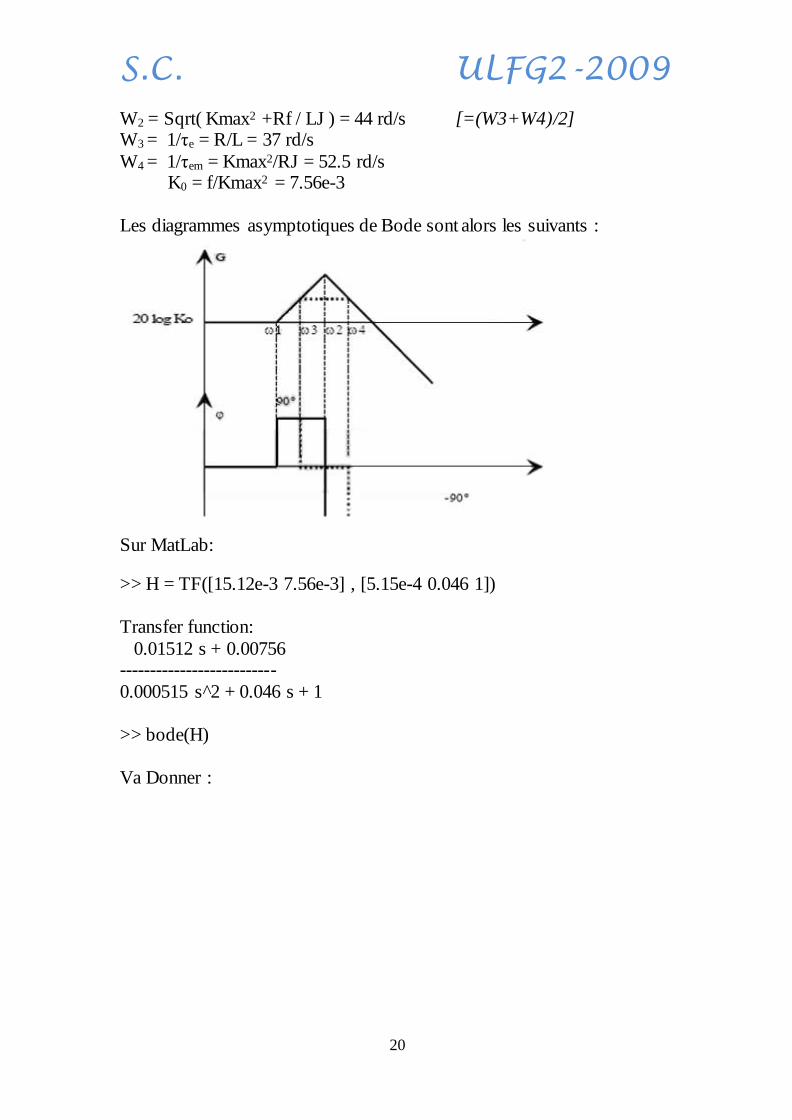
W2 = Sqrt( Kmax2 +Rf / LJ ) = 44 rd/s [=(W3+W4)/2] W3 = 1/τe = R/L = 37 rd/s
W4 = 1/τem = Kmax2/RJ = 52.5 rd/s K0 = f/Kmax2 = 7.56e-3
Les diagrammes asymptotiques de Bode sont alors les suivants :
Sur MatLab:
>> H = TF([15.12e-3 7.56e-3] , [5.15e-4 0.046 1])
Transfer function:
0.01512 s + 0.00756 --------------------------
0.000515 s^2 + 0.046 s + 1
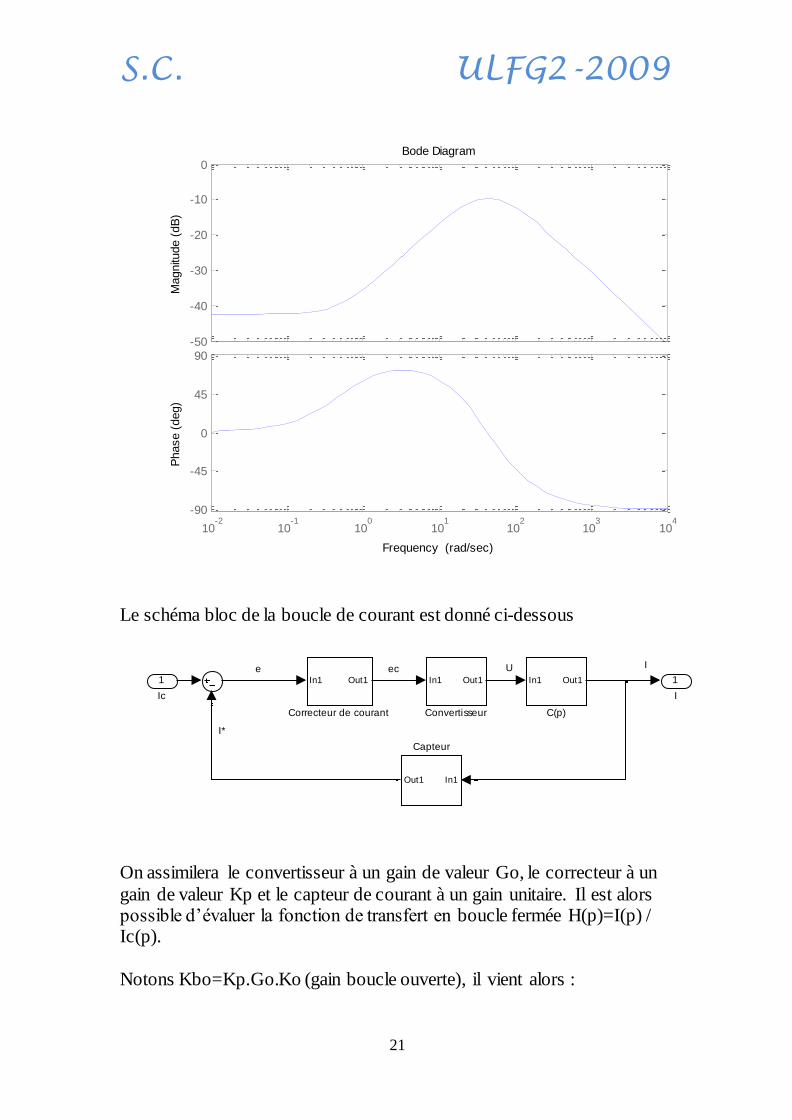
>> bode(H)
Va Donner :
S.C. ULFG2-2009
21
Le schéma bloc de la boucle de courant est donné ci-dessous
On assimilera le convertisseur à un gain de valeur Go, le correcteur à un
gain de valeur Kp et le capteur de courant à un gain unitaire. Il est alors possible d’évaluer la fonction de transfert en boucle fermée H(p)=I(p) / Ic(p).
Notons Kbo=Kp.Go.Ko (gain boucle ouverte), il vient alors :
-50
-40
-30
-20
-10
0M
agnitu
de (
dB
)
10-2
10-1
100
101
102
103
104
-90
-45
0
45
90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
e
I*
ec U I
1
I
In1 Out1
Correcteur de courant
In1 Out1
Convertisseur
In1Out1
Capteur
In1 Out1
C(p)
1
Ic
S.C. ULFG2-2009
22
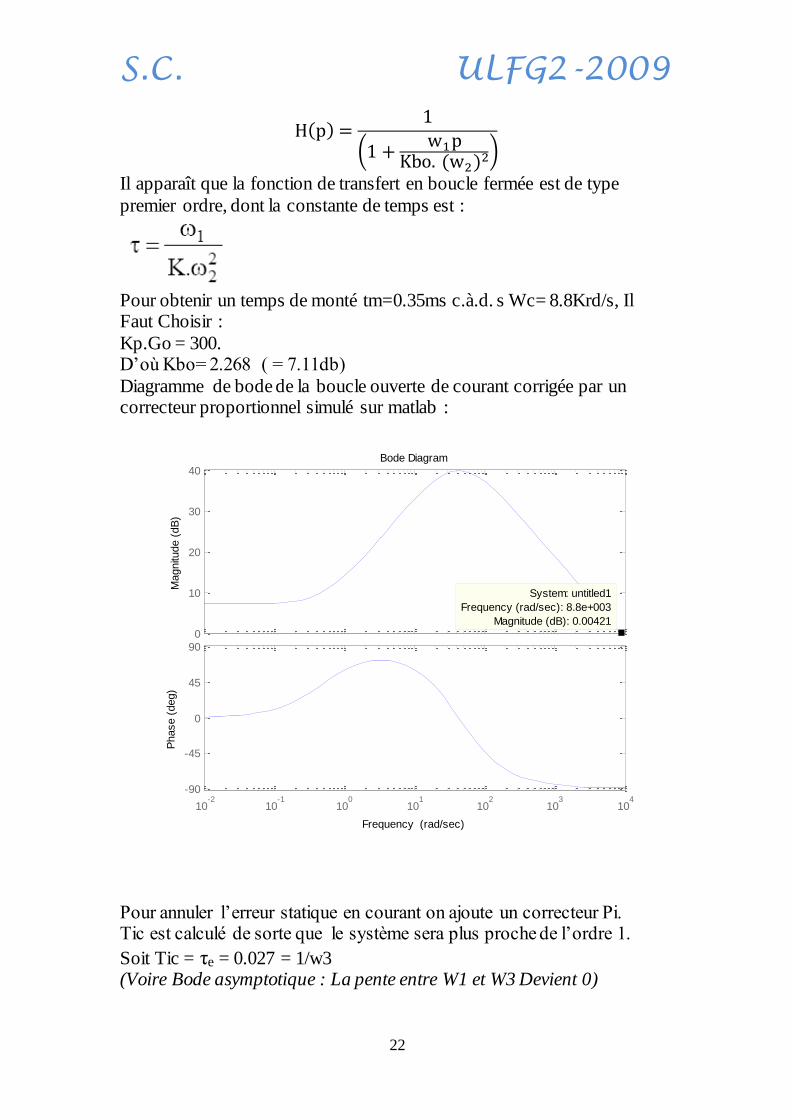
H(p) =1
(1 +w1p
Kbo. (w2)2)
Il apparaît que la fonction de transfert en boucle fermée est de type
premier ordre, dont la constante de temps est :
Pour obtenir un temps de monté tm=0.35ms c.à.d. s Wc= 8.8Krd/s, Il Faut Choisir :
Kp.Go = 300. D’où Kbo= 2.268 ( = 7.11db)
Diagramme de bode de la boucle ouverte de courant corrigée par un correcteur proportionnel simulé sur matlab :
Pour annuler l’erreur statique en courant on ajoute un correcteur Pi. Tic est calculé de sorte que le système sera plus proche de l’ordre 1.
Soit Tic = τe = 0.027 = 1/w3 (Voire Bode asymptotique : La pente entre W1 et W3 Devient 0)
10-2
10-1
100
101
102
103
104
-90
-45
0
45
90
Phase (
deg)
0
10
20
30
40
Magnitu
de (
dB
)
System: untitled1
Frequency (rad/sec): 8.8e+003
Magnitude (dB): 0.00421
Bode Diagram
Frequency (rad/sec)
S.C. ULFG2-2009
23
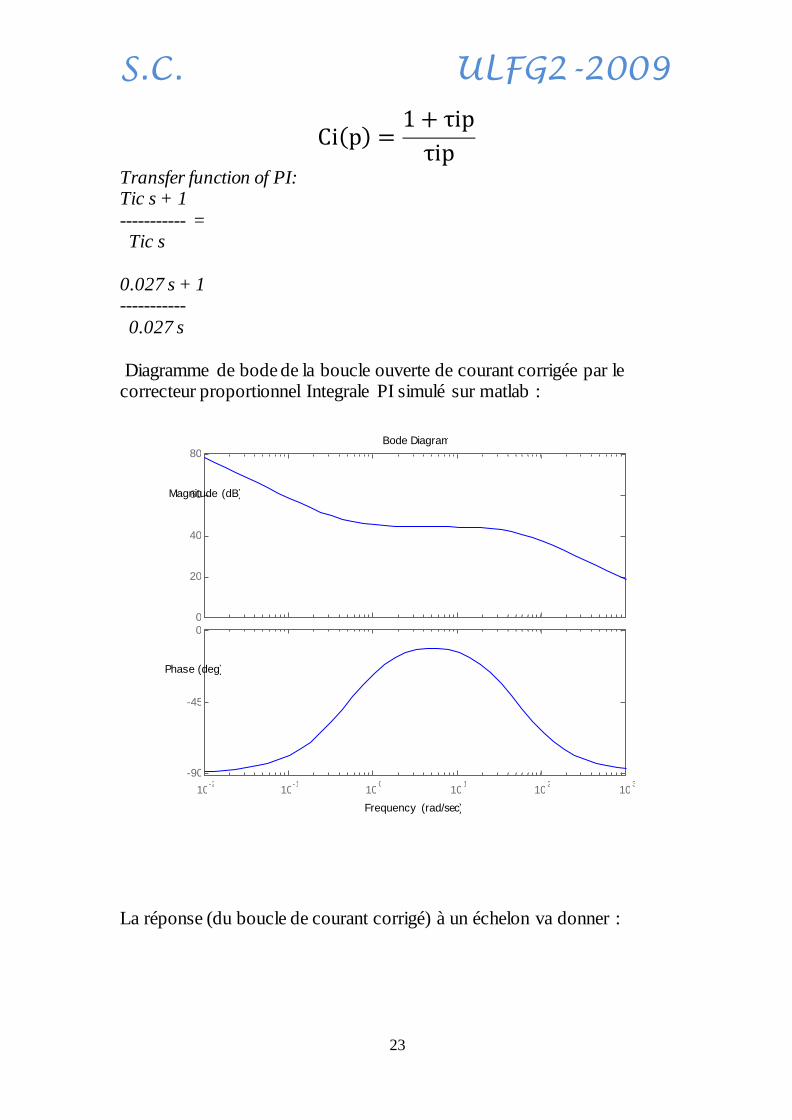
Ci(p) =1 + τip
τip
Transfer function of PI: Tic s + 1
----------- = Tic s
0.027 s + 1 -----------
0.027 s
Diagramme de bode de la boucle ouverte de courant corrigée par le correcteur proportionnel Integrale PI simulé sur matlab :
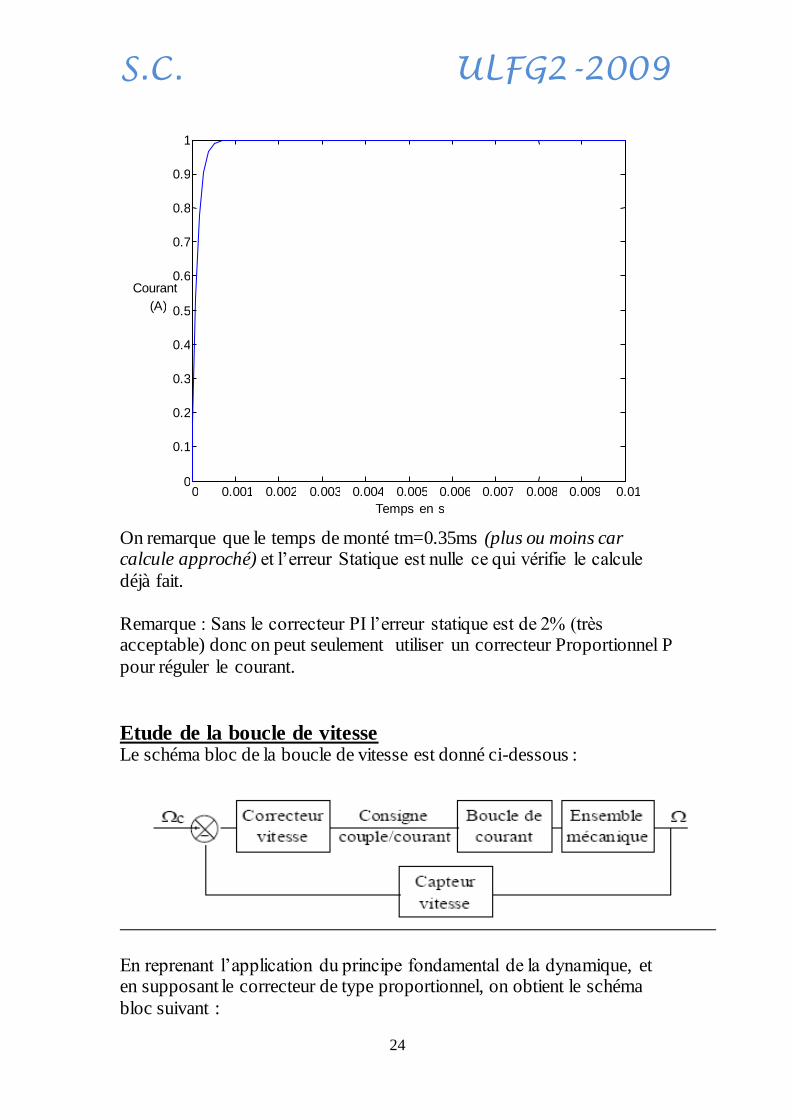
La réponse (du boucle de courant corrigé) à un échelon va donner :
0
20
40
60
80
Magnitude (dB)
10 -2 10 -1
10 0 10 1
10 2 10 3
-90
-45
0
Phase (deg)
Bode Diagram
Frequency (rad/sec)
S.C. ULFG2-2009
24
On remarque que le temps de monté tm=0.35ms (plus ou moins car calcule approché) et l’erreur Statique est nulle ce qui vérifie le calcule
déjà fait.
Remarque : Sans le correcteur PI l’erreur statique est de 2% (très acceptable) donc on peut seulement utiliser un correcteur Proportionnel P
pour réguler le courant.
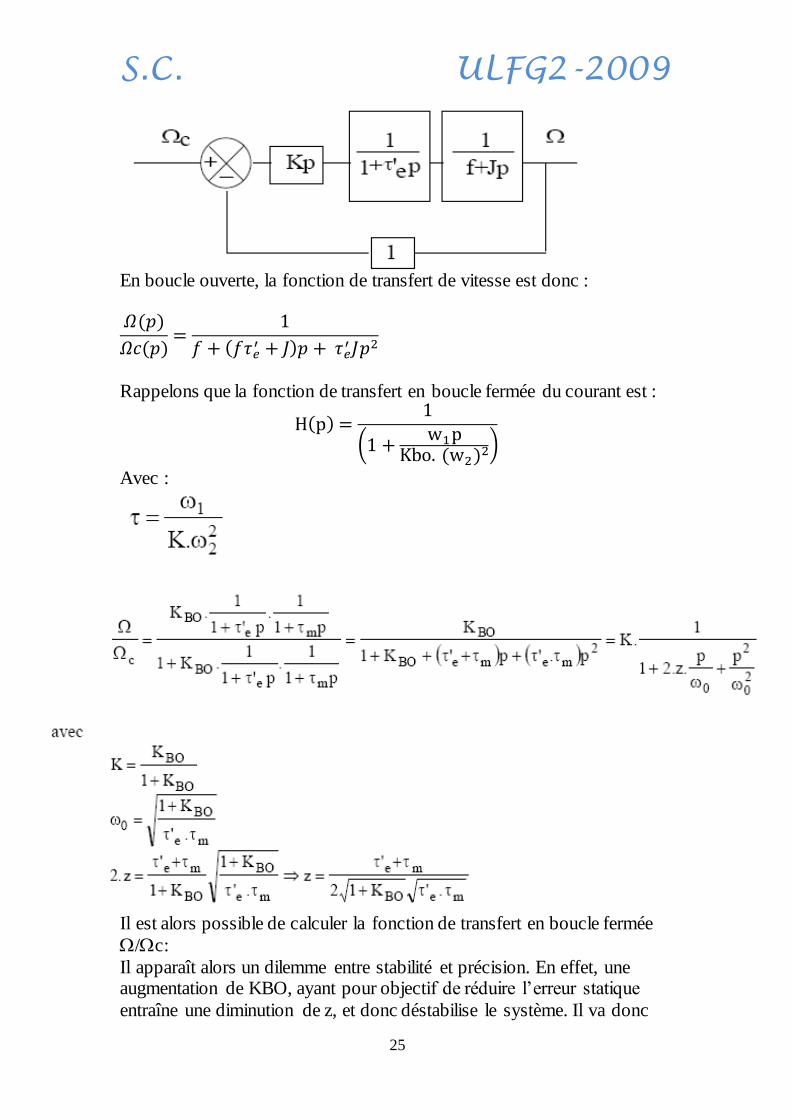
Etude de la boucle de vitesse Le schéma bloc de la boucle de vitesse est donné ci-dessous :
En reprenant l’application du principe fondamental de la dynamique, et en supposant le correcteur de type proportionnel, on obtient le schéma
bloc suivant :
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps en s
Courant (A)
S.C. ULFG2-2009
25
En boucle ouverte, la fonction de transfert de vitesse est donc : 𝛺(𝑝)
𝛺𝑐(𝑝)=
1
𝑓 + (𝑓𝜏𝑒′ + 𝐽)𝑝 + 𝜏𝑒
′ 𝐽𝑝2
Rappelons que la fonction de transfert en boucle fermée du courant est :
H(p) =1
(1 +w1p
Kbo. (w2)2)
Avec :
Il est alors possible de calculer la fonction de transfert en boucle fermée
/c:
Il apparaît alors un dilemme entre stabilité et précision. En effet, une augmentation de KBO, ayant pour objectif de réduire l’erreur statique
entraîne une diminution de z, et donc déstabilise le système. Il va donc
S.C. ULFG2-2009
26
être nécessaire d’introduire un le correcteur PI ayant pour rôle d’annuler l’erreur statique, sans pour autant déstabiliser le système.
AN : K= 0.7 τe’= 3.69e-4
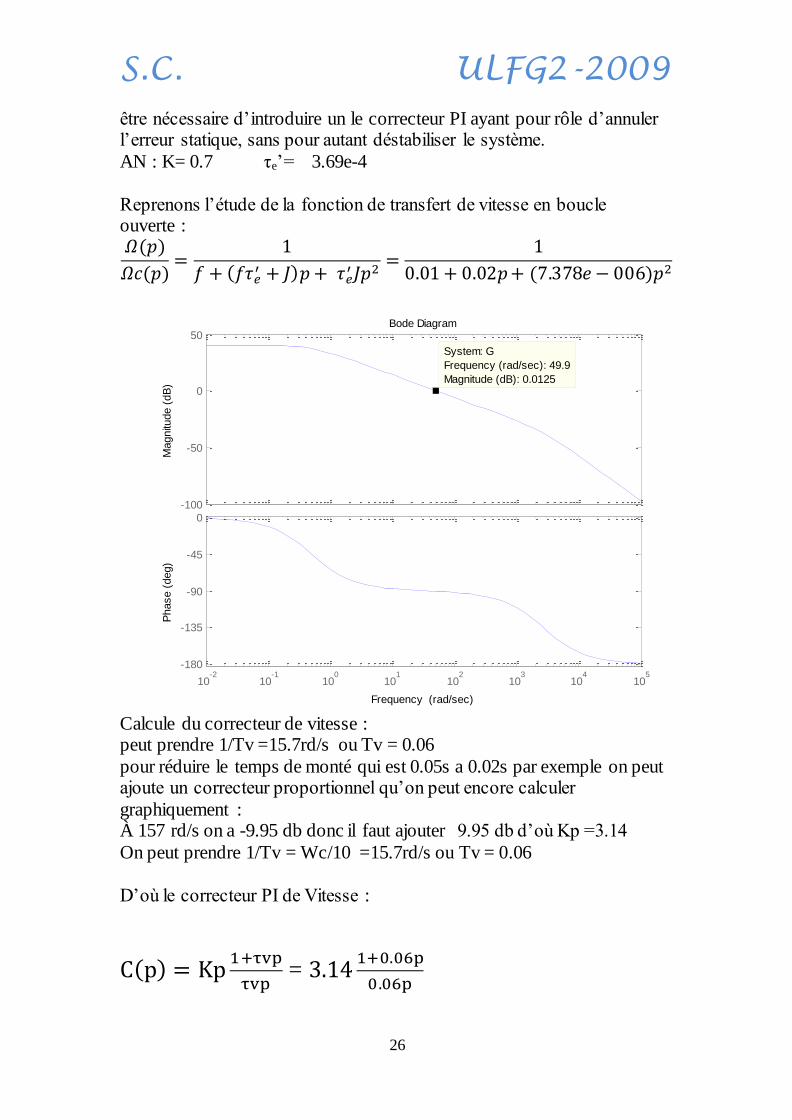
Reprenons l’étude de la fonction de transfert de vitesse en boucle ouverte : 𝛺(𝑝)
𝛺𝑐(𝑝)=
1
𝑓 + (𝑓𝜏𝑒′ + 𝐽)𝑝 + 𝜏𝑒
′ 𝐽𝑝2=
1
0.01 + 0.02𝑝 + (7.378𝑒 − 006)𝑝2
Calcule du correcteur de vitesse : peut prendre 1/Tv =15.7rd/s ou Tv = 0.06
pour réduire le temps de monté qui est 0.05s a 0.02s par exemple on peut ajoute un correcteur proportionnel qu’on peut encore calculer
graphiquement : À 157 rd/s on a -9.95 db donc il faut ajouter 9.95 db d’où Kp =3.14
On peut prendre 1/Tv = Wc/10 =15.7rd/s ou Tv = 0.06
D’où le correcteur PI de Vitesse :
C(p) = Kp1+τvp
τvp = 3.14
1+0.06p
0.06p
10-2
10-1
100
101
102
103
104
105
-180
-135
-90
-45
0
Phase (
deg)
-100
-50
0
50
Magnitu
de (
dB
)
System: G
Frequency (rad/sec): 49.9
Magnitude (dB): 0.0125
Bode Diagram
Frequency (rad/sec)
S.C. ULFG2-2009
27
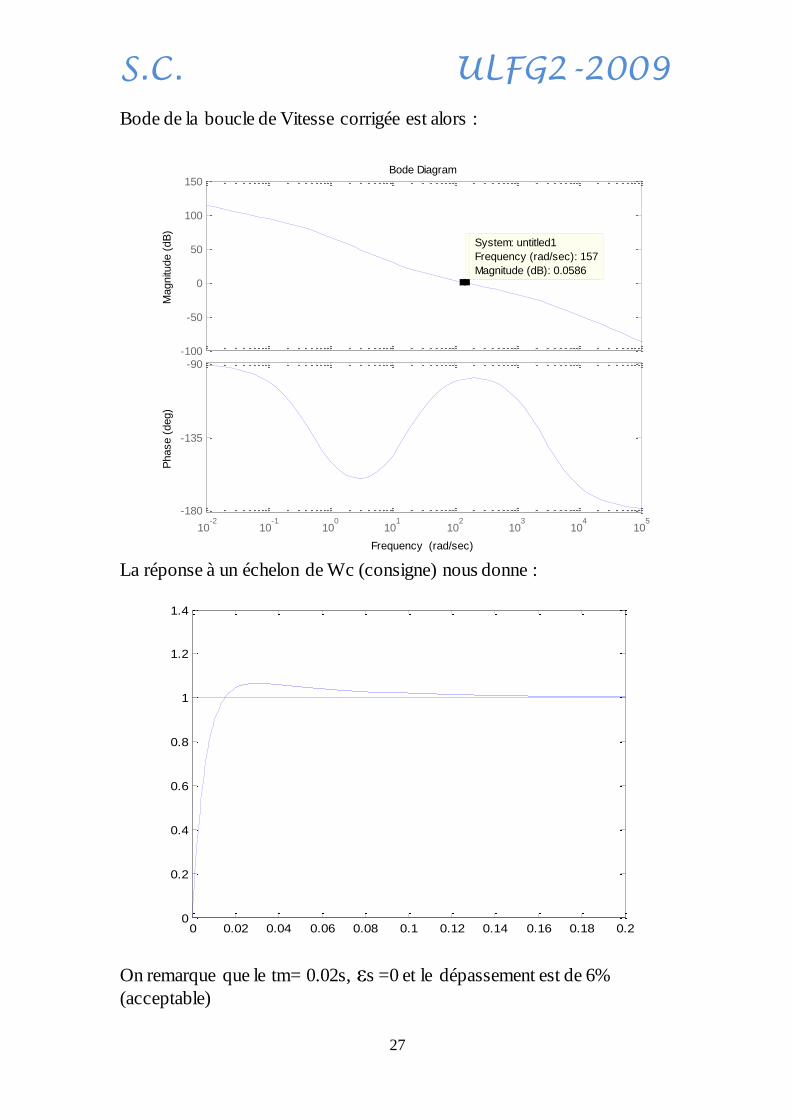
Bode de la boucle de Vitesse corrigée est alors :
La réponse à un échelon de Wc (consigne) nous donne :
On remarque que le tm= 0.02s, εs =0 et le dépassement est de 6%
(acceptable)
10-2
10-1
100
101
102
103
104
105
-180
-135
-90
Phase (
deg)
-100
-50
0
50
100
150
System: untitled1
Frequency (rad/sec): 136
Magnitude (dB): 1.27
System: untitled1
Frequency (rad/sec): 157
Magnitude (dB): 0.0586
Magnitu
de (
dB
)Bode Diagram
Frequency (rad/sec)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.2
0.4
0.6
0.8
1
1.2
1.4
S.C. ULFG2-2009
28
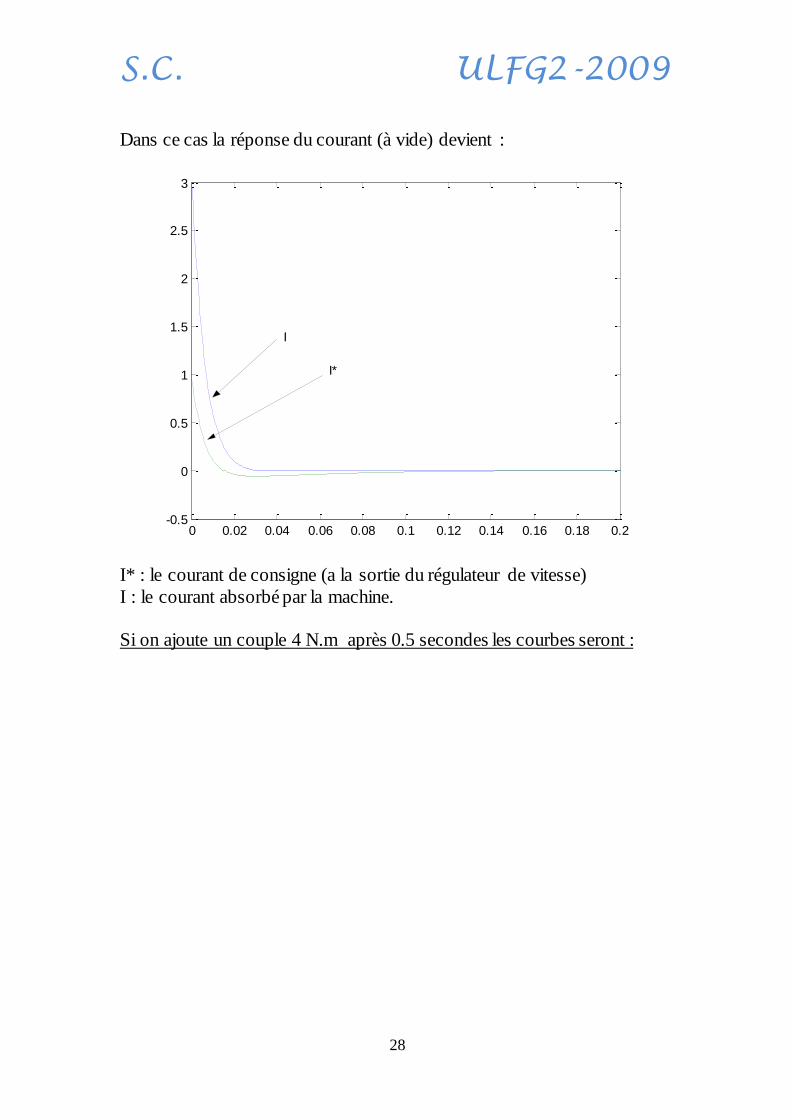
Dans ce cas la réponse du courant (à vide) devient :
I* : le courant de consigne (a la sortie du régulateur de vitesse)
I : le courant absorbé par la machine.
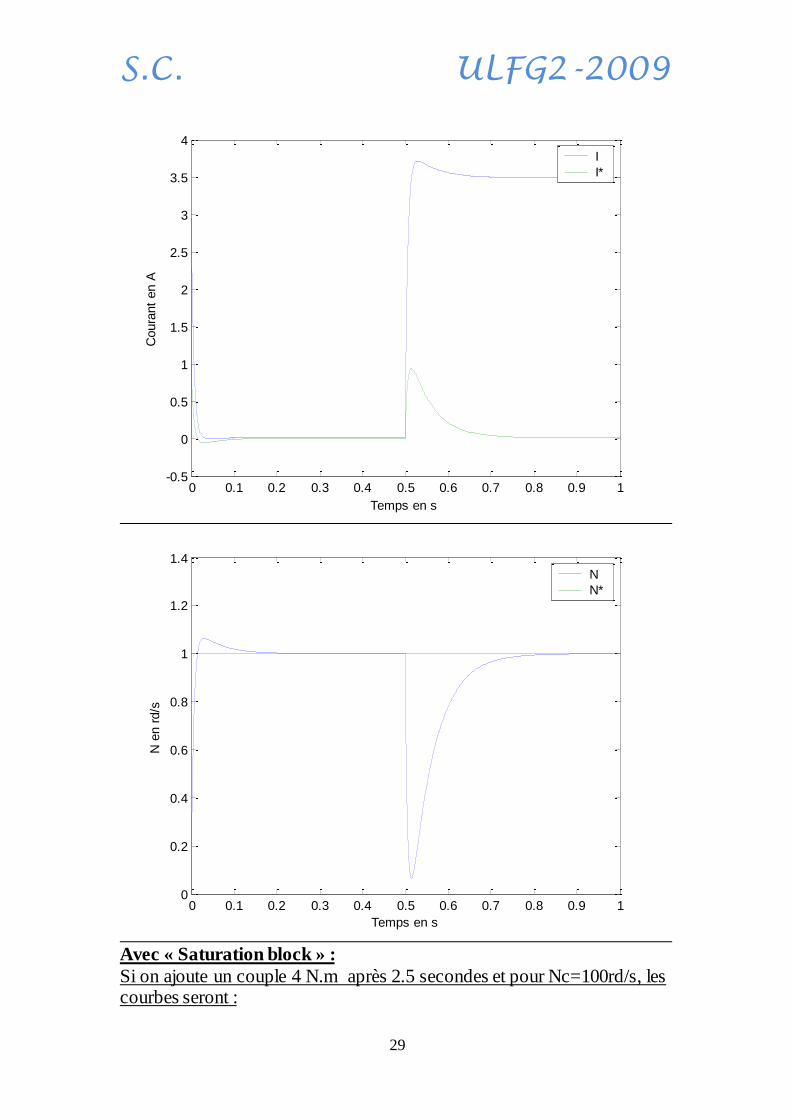
Si on ajoute un couple 4 N.m après 0.5 secondes les courbes seront :
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.5
0
0.5
1
1.5
2
2.5
3
I*
I
S.C. ULFG2-2009
29
Avec « Saturation block » :
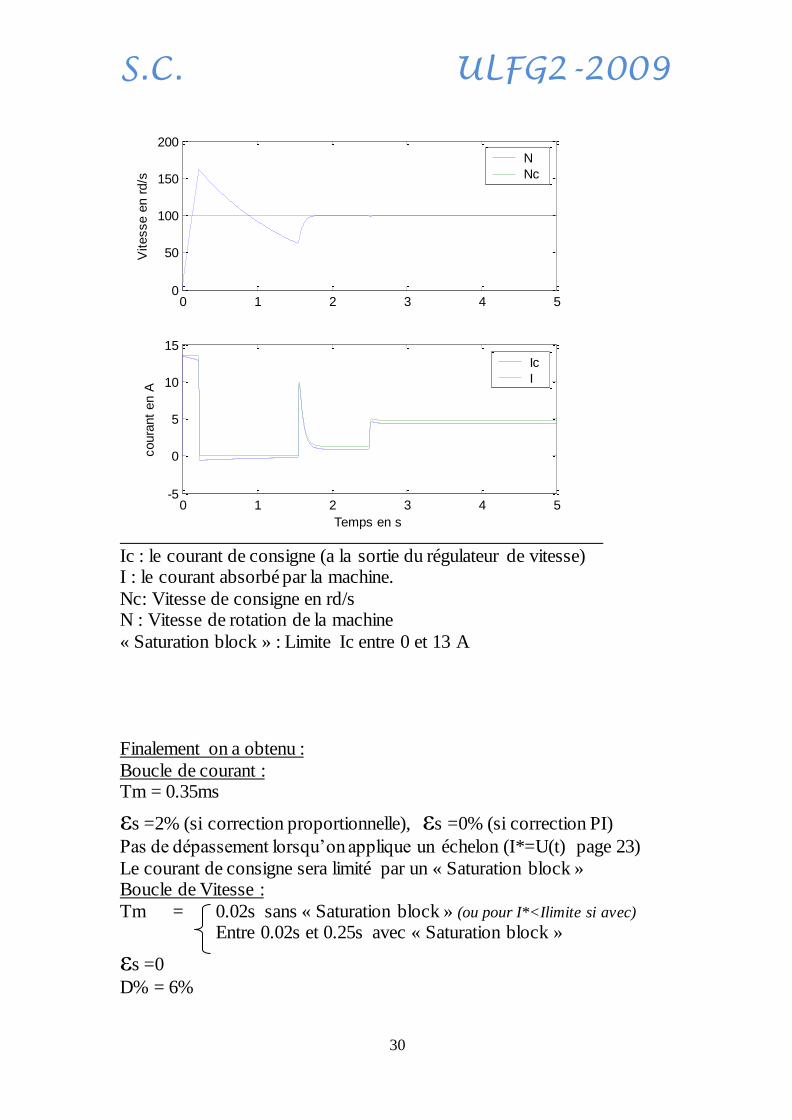
Si on ajoute un couple 4 N.m après 2.5 secondes et pour Nc=100rd/s, les courbes seront :
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Temps en s
Coura
nt
en A
I
I*
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Temps en s
N e
n r
d/s
N
N*
S.C. ULFG2-2009
30
Ic : le courant de consigne (a la sortie du régulateur de vitesse) I : le courant absorbé par la machine.
Nc: Vitesse de consigne en rd/s N : Vitesse de rotation de la machine
« Saturation block » : Limite Ic entre 0 et 13 A
Finalement on a obtenu :
Boucle de courant : Tm = 0.35ms
εs =2% (si correction proportionnelle), εs =0% (si correction PI)
Pas de dépassement lorsqu’on applique un échelon (I*=U(t) page 23)
Le courant de consigne sera limité par un « Saturation block » Boucle de Vitesse :
Tm = 0.02s sans « Saturation block » (ou pour I*<Ilimite si avec) Entre 0.02s et 0.25s avec « Saturation block »
εs =0
D% = 6%
0 1 2 3 4 50
50
100
150
200V
itesse e
n r
d/s
0 1 2 3 4 5-5
0
5
10
15
Temps en s
coura
nt
en A
N
Nc
Ic
I
S.C. ULFG2-2009
31





























