Embed Size (px)
Citation preview
1
La cinématique : Elle permet d'étudier les mouvements d’une particule mobile, par rapport à un repère de référence, en fonction du temps indépendamment des causes qui les produisent. Elle a pour but de préciser les trajectoires et les lois horaires.
Pour étudier le mouvement d’une particule M,on doit repérer la position de cette particule :
dans le temps et dans l’espace.
On suppose que l’espace est de dimension au plus 3 et que le temps est absolu indépendant du lieu.
En mécanique classique, et au cours de cet élément du module, on considère que tout
système physique est réduit à un point matériel (particule M) coïncidant avec son
centre de gravité et contenant sa masse m. Nous admettons que sa vitesse v est
négligeable devant la célérité de la lumière c.
2
RepèreRepère d’espace d’espace
Pour repérer la position d’une particule, il est nécessaire de définir un repère d’espace :
A un solide, lié à ce repère d’espace, on fixe une origine O et une base ( i , j , k ) :
Le trièdre (O , i , j , k ) est le repère d’espace.
Repère de tempsRepère de temps
Pour étudier le mouvement d’une particule, on a aussi besoin d’un repère de temps :
On définie un repère de temps par une origine et une unité à l’aide d’une horloge.
RéférentielRéférentiel
Le repère d’espace et le repère de temps définissent un REFERENTIEL.
Un référentiel est donc un « objet » par rapport auquel on étudie le mouvement. Tout mouvement est relatif au référentiel utilisé.
3
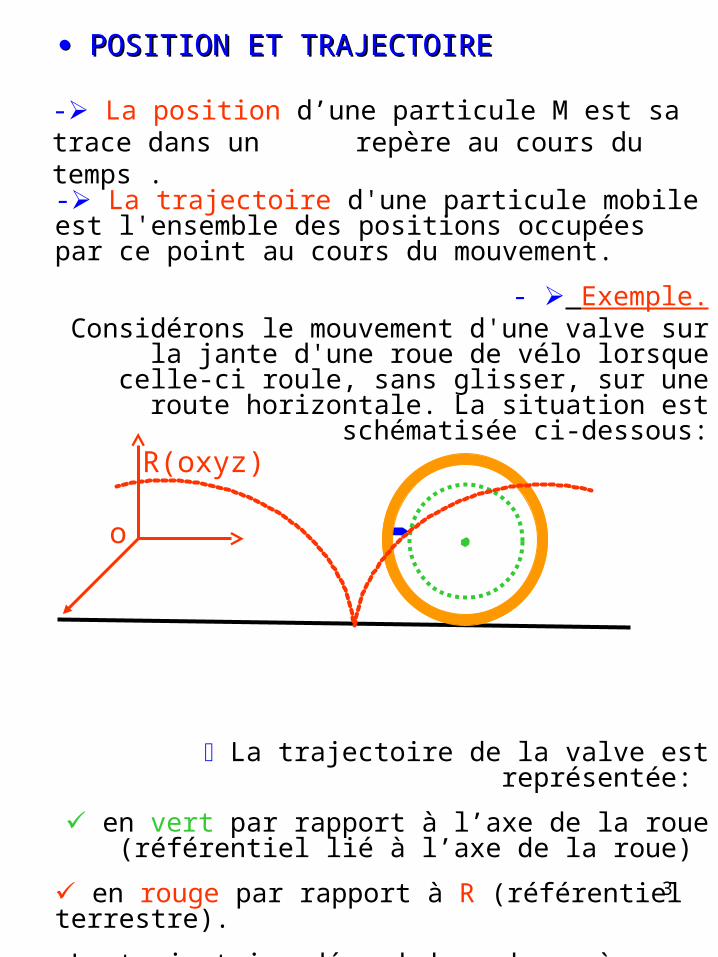
- La trajectoire d'une particule mobile est l'ensemble des positions occupées par ce point au cours du mouvement.
- Exemple.Considérons le mouvement d'une valve sur la jante
d'une roue de vélo lorsque celle-ci roule, sans glisser, sur une route horizontale. La situation est schématisée
ci-dessous:
La trajectoire de la valve est représentée:
en vert par rapport à l’axe de la roue (référentiel lié à l’axe de la roue)
en rouge par rapport à R (référentiel terrestre).
La trajectoire dépend donc du repère, on dit que la trajectoire est relative.
- La position d’une particule M est sa trace dans un repère au cours du temps .
POSITION ET TRAJECTOIREPOSITION ET TRAJECTOIRE
R(oxyz)
o
4
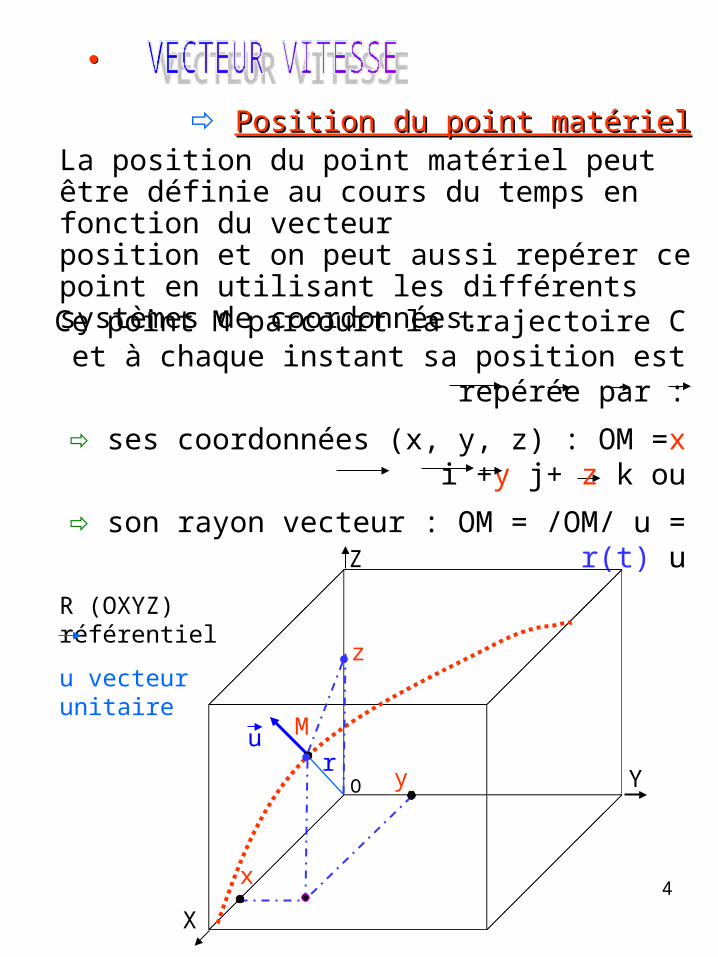
Position du point matérielPosition du point matériel La position du point matériel peut être définie au cours du temps en fonction du vecteurposition et on peut aussi repérer ce point en utilisant les différents systèmes de coordonnées.
Ce point M parcourt la trajectoire C et à chaque instant sa position est repérée par :
ses coordonnées (x, y, z) : OM =x i +y j+ z k ou
son rayon vecteur : OM = /OM/ u = r(t) u
R (OXYZ) référentiel
u vecteur unitaire
X
Y
Z
O
M
ru
y
x
z
5
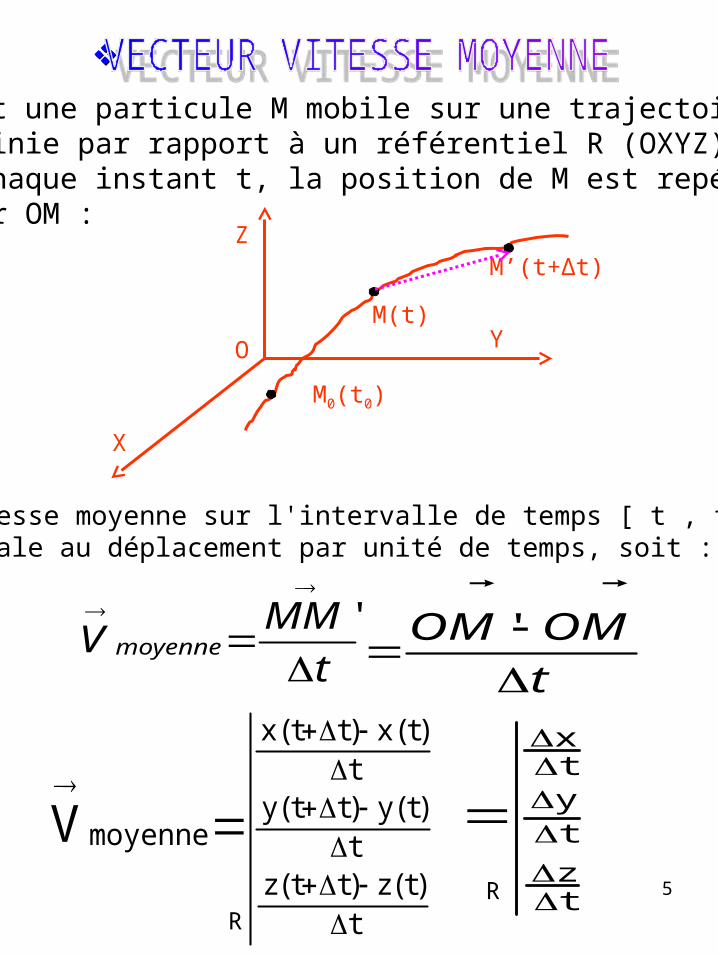
La vitesse moyenne sur l'intervalle de temps [ t , t+ Δt ] est égale au déplacement par unité de temps, soit :
Soit une particule M mobile sur une trajectoire définie par rapport à un référentiel R (OXYZ). A chaque instant t, la position de M est repérée par OM :
t)t(z)tt(z
t)t(y)tt(y
t)t(x)tt(x
moyenneV
tz
tytx
RR
t
MMV moyenne
'
t
MOMO
'
O
X
YM(t)
M0(t0)
M’(t+Δt)Z
6
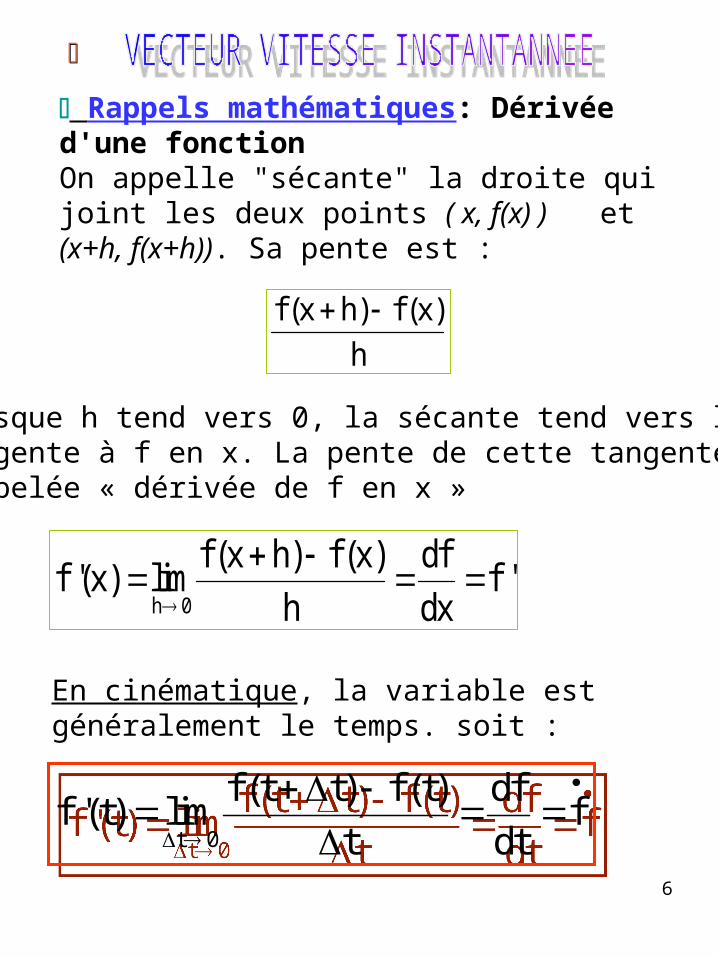
Rappels mathématiques: Dérivée d'une fonction On appelle "sécante" la droite qui joint les deux points ( x, f(x) ) et (x+h, f(x+h)). Sa pente est :
Lorsque h tend vers 0, la sécante tend vers la tangente à f en x. La pente de cette tangente est appelée « dérivée de f en x »
En cinématique, la variable est généralement le temps. soit :
f (x h) f (x)
h
h 0
f (x h) f (x) dff '(x) lim f '
h dx
t 0
f (t t) f (t) dff '(t) lim f
t dt
t 0
f (t t) f (t) dff '(t) lim f
t dt
7
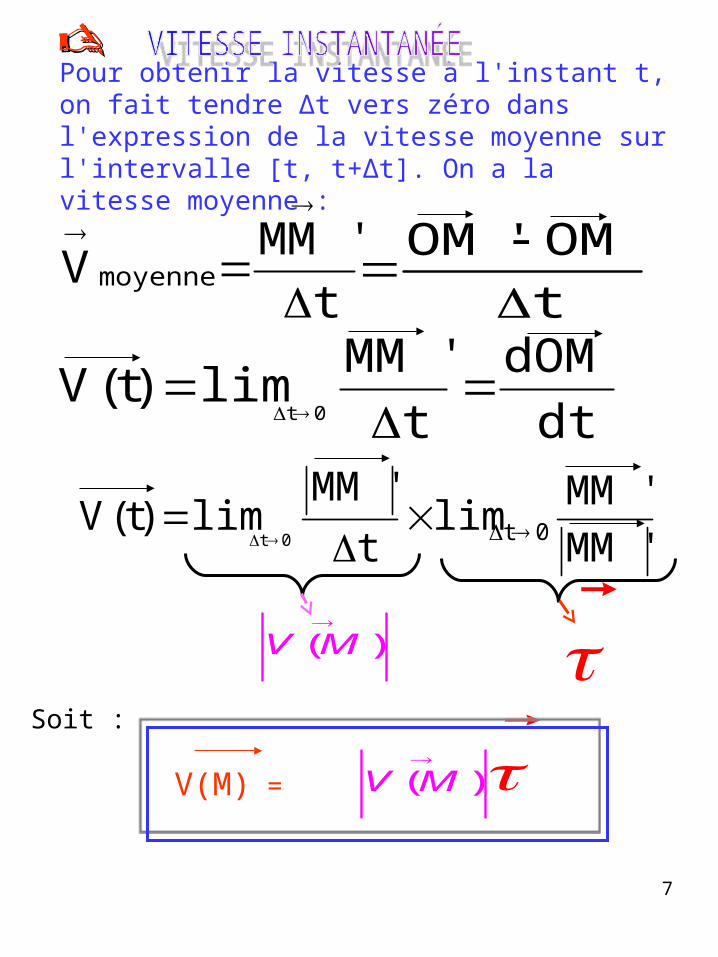
Pour obtenir la vitesse à l'instant t, on fait tendre Δt vers zéro dans l'expression de la vitesse moyenne sur l'intervalle [t, t+Δt]. On a la vitesse moyenne :
t
OM'OM
t
'MMVmoyenne
'MM
'MMlim
t
'MMlim)t(V 0t0t
dt
dOM
t
'MMlim)t(V
0t
Soit :
V(M) = ( )V M
( )V M
8
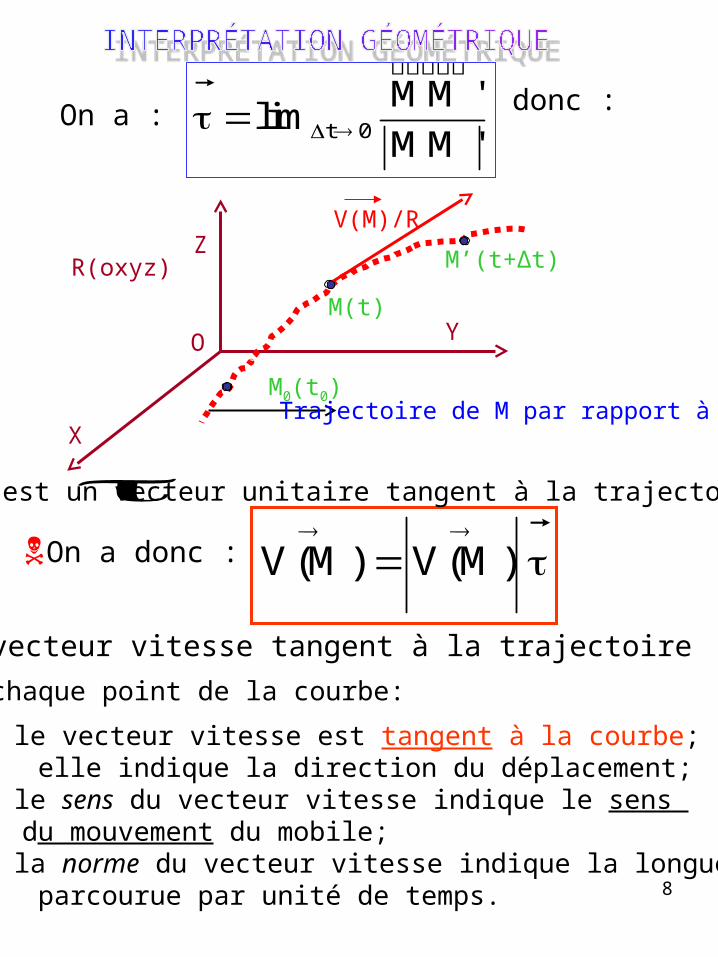
En chaque point de la courbe:
le vecteur vitesse est tangent à la courbe; elle indique la direction du déplacement; le sens du vecteur vitesse indique le sens du mouvement du mobile; la norme du vecteur vitesse indique la longueur parcourue par unité de temps.
)M(V)M(V
On a donc :
O
X
YM(t)
M0(t0)
M’(t+Δt)Z
R(oxyz)
Trajectoire de M par rapport à R
V(M)/R
vecteur vitesse tangent à la trajectoire
est un vecteur unitaire tangent à la trajectoire
t 0
MM 'lim
MM ' """"""""""""""
On a : donc :
9
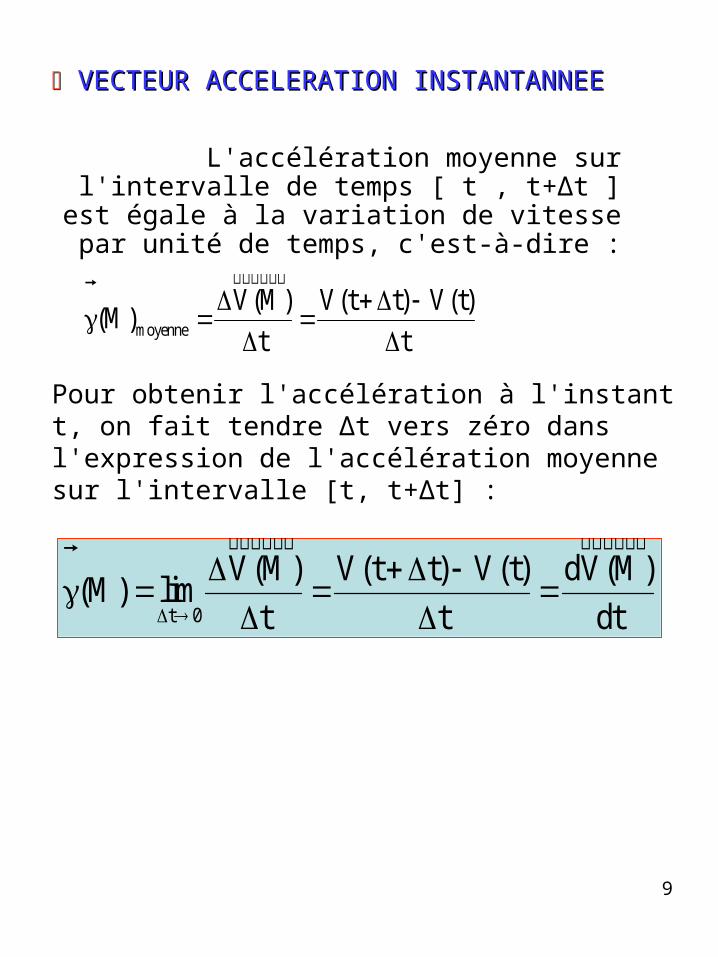
VECTEUR ACCELERATION INSTANTANNEEVECTEUR ACCELERATION INSTANTANNEE
L'accélération moyenne sur l'intervalle de temps [ t , t+Δt ] est égale à la variation de
vitesse par unité de temps, c'est-à-dire :
Pour obtenir l'accélération à l'instant t, on fait tendre Δt vers zéro dans l'expression de l'accélération moyenne sur l'intervalle [t, t+Δt] :
moyenne
V(M) V(t t) V(t)(M)
t t
""""""""""""""
t 0
V(M) V(t t) V(t) dV(M)(M) lim
t t dt
""""""""""""""""""""""""""""
10
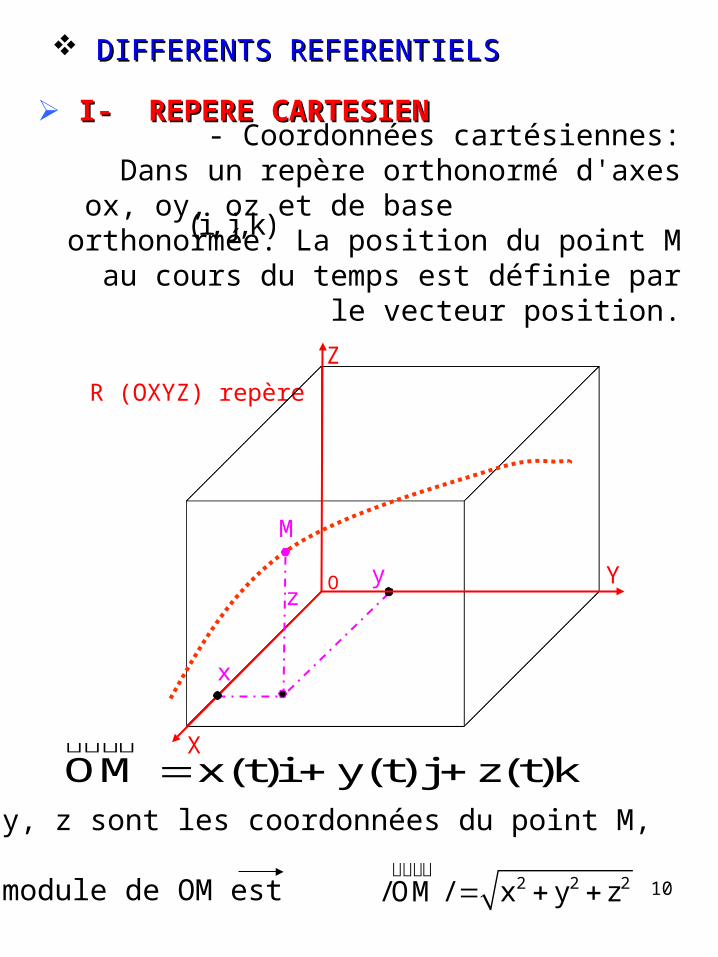
DIFFERENTS REFERENTIELSDIFFERENTS REFERENTIELS
I- REPERE CARTESIENI- REPERE CARTESIEN - Coordonnées cartésiennes:
Dans un repère orthonormé d'axes ox, oy, oz et de base orthonormée. La position du point M au cours du temps est définie par le
vecteur position.
)k ,j ,i(
X
R (OXYZ) repère
Y
Z
O
M
y
x
z
x, y, z sont les coordonnées du point M,
Le module de OM est 2 2 2/ OM / x y z """"""""""""""
OM x(t)i y(t) j z(t)k """"""""""""""""""""""""""""""""""""""""""""""""""""""""
11
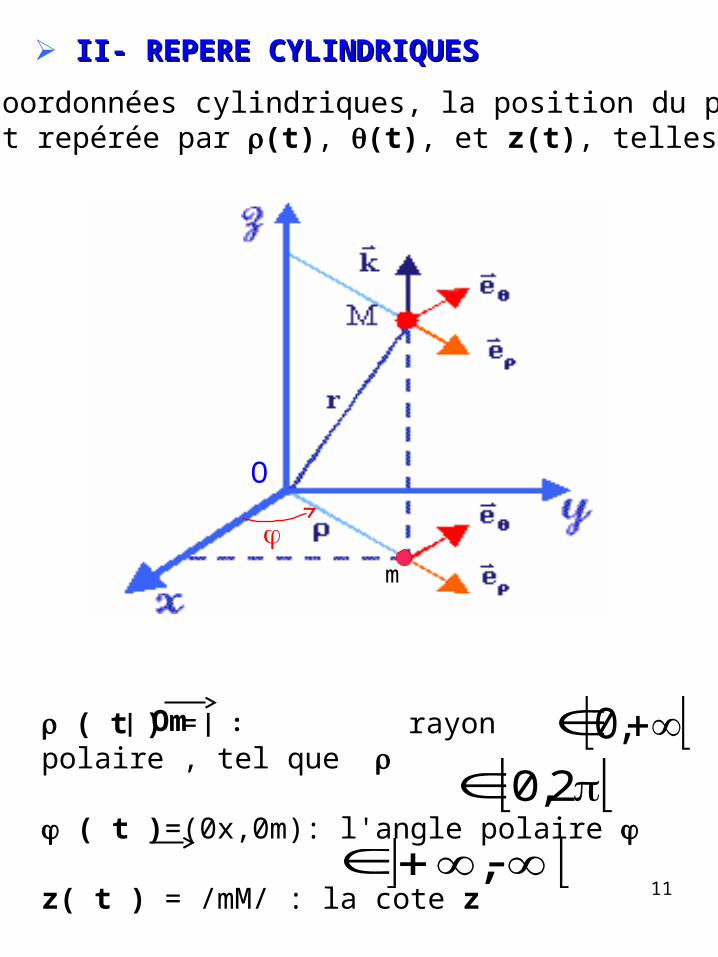
II- REPERE CYLINDRIQUESII- REPERE CYLINDRIQUES
En coordonnées cylindriques, la position du pointM est repérée par (t), (t), et z(t), telles que :
( t ) = rayon polaire , tel que
( t )=(0x,0m): l'angle polaire
z( t ) = /mM/ : la cote z
,0
2,0
,
| Om | :
O
m
12
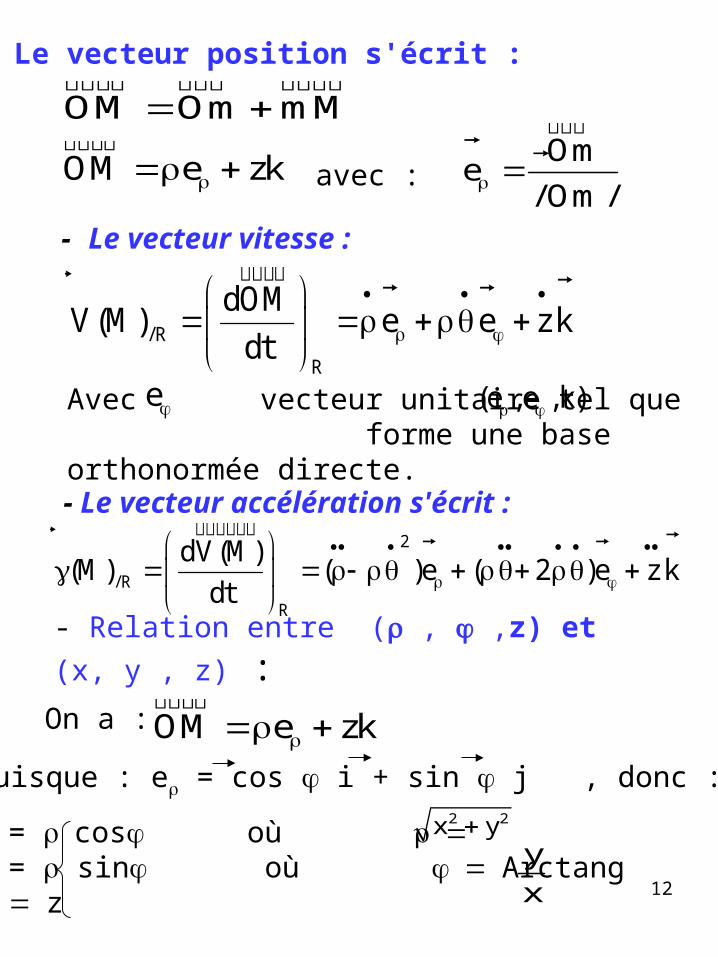
- Relation entre ( , ,z) et (x, y , z) :
- Le vecteur vitesse :
- Le vecteur accélération s'écrit :
- Le vecteur position s'écrit :
Et puisque : e = cos i + sin j , donc :
OM e zk """""""""""""" OM Om mM """"""""""""""""""""""""""""""""""""""""""
Avec vecteur unitaire tel que forme une base orthonormée directe.
OM e zk """""""""""""" On a :
Ome
/ Om /
""""""""""""""
""""""""""""""avec :
/ R
R
dOMV(M) e e z k
dt
""""""""""""""""""""""""""""
e
(e , e , k)
2
/ R
R
dV(M)(M) ( )e ( 2 )e z k
dt
""""""""""""""""""""""""""""
x = cosoùy = sinoùArctangz z
2 2x yy
x
13
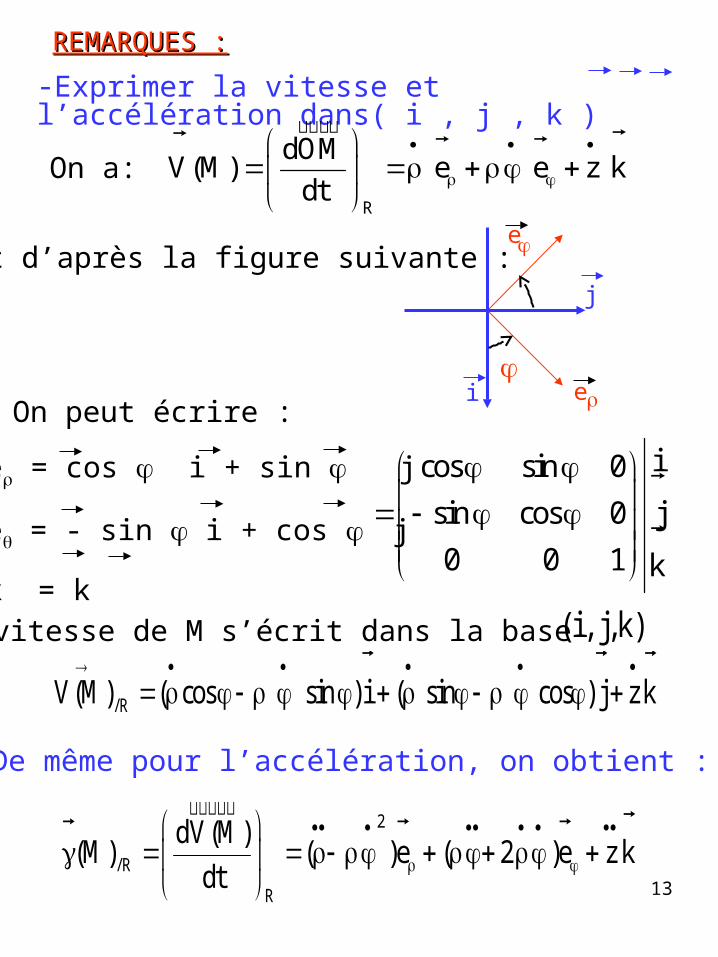
REMARQUES :REMARQUES :
Et d’après la figure suivante :
e = cos i + sin j
e = - sin i + cos j
k = k
- De même pour l’accélération, on obtient :
On peut écrire :i
j
e
e
icos sin 0
sin cos 0 j
0 0 1 k
On a:
Et la vitesse de M s’écrit dans la base :
-Exprimer la vitesse et l’accélération dans( i , j , k )
R
dOMV(M) e e z k
dt
""""""""""""""
2
/ R
R
dV(M)(M) ( )e ( 2 )e z k
dt
""""""""""""""
/ RV(M) ( cos sin )i ( sin cos ) j z k
( i , j, k)
14
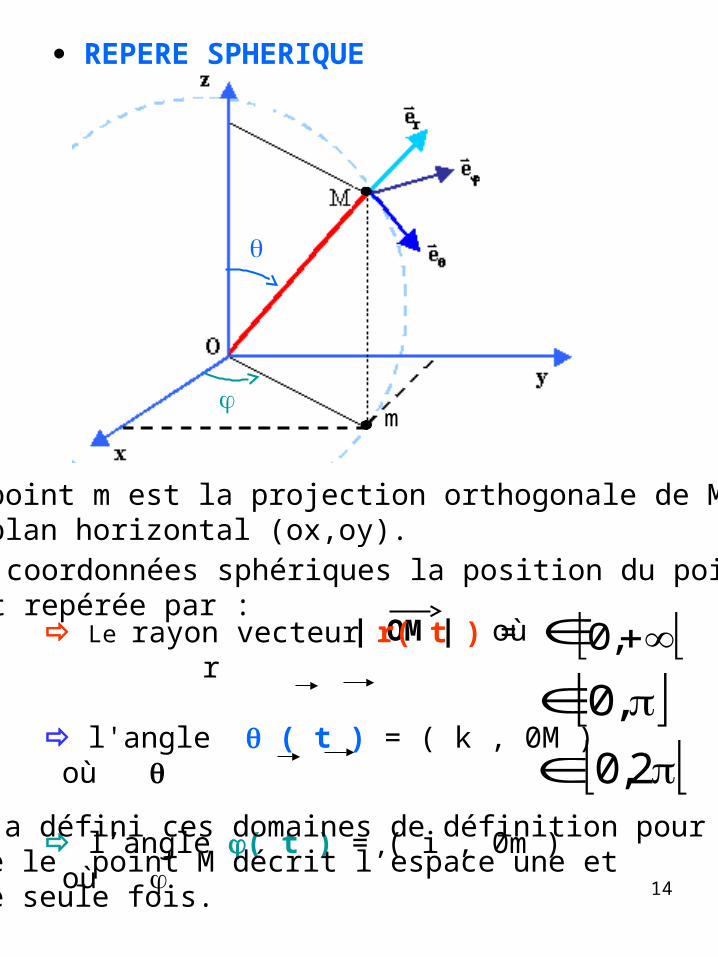
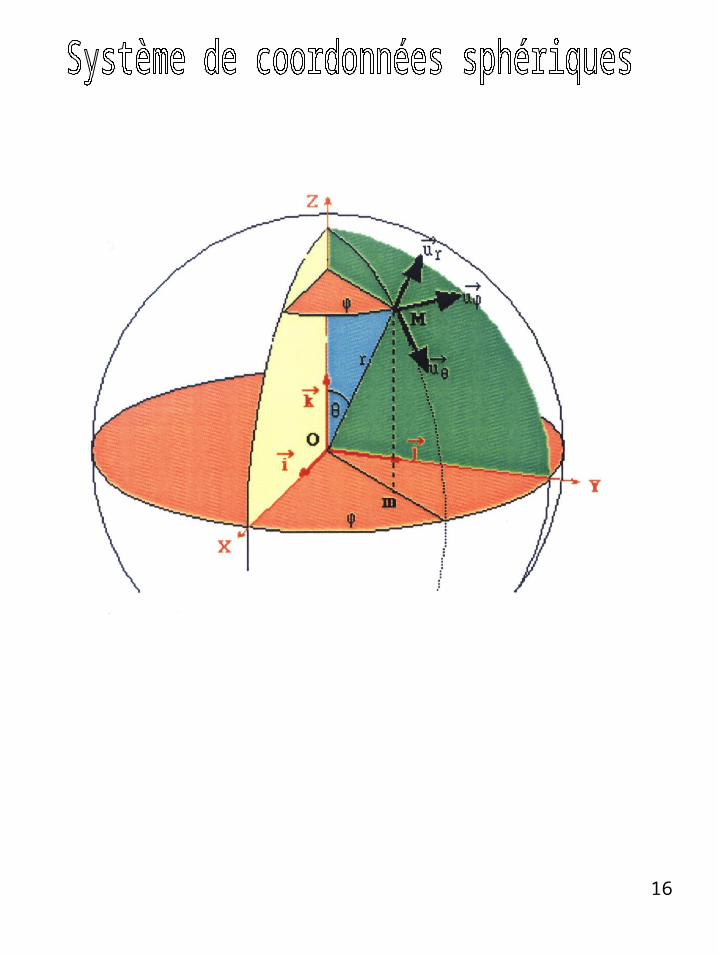
REPERE SPHERIQUE
En coordonnées sphériques la position du point M est repérée par :
| OM | où Le rayon vecteur r( t ) = r
l'angle ( t ) = ( k , 0M ) où
l’angle ( t ) = ( i , 0m ) où
,0
,0
2,0On a défini ces domaines de définition pour Que le point M décrit l’espace une et une seule fois.
m
Le point m est la projection orthogonale de M sur le plan horizontal (ox,oy).
15
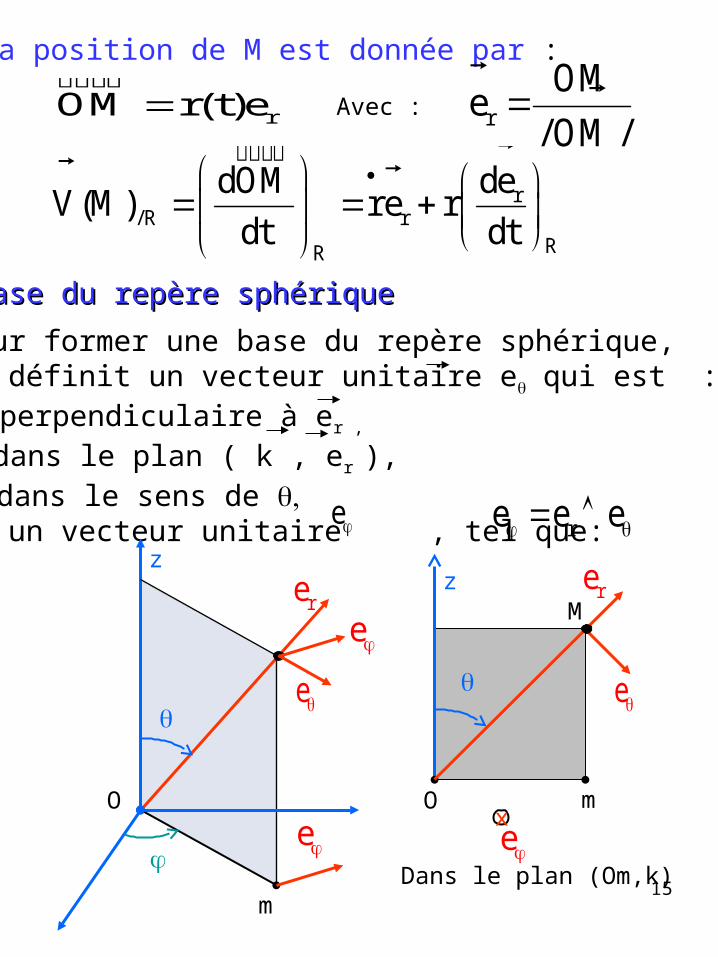
La position de M est donnée par :
Avec :
r/ R r
RR
dedOMV(M) r e r
dt dt
""""""""""""""
r
OMe
/ OM /
rOM r(t)e
""""""""""""""
-Base du repère sphériqueBase du repère sphérique
Pour former une base du repère sphérique, on définit un vecteur unitaire equi est : perpendiculaire à er ,
dans le plan ( k , er ),
dans le sens de et un vecteur unitaire , tel que:
m
M
z
re
e
O
e
re
e
z
O mxe
Dans le plan (Om,k)
e
e
re e e
16
17
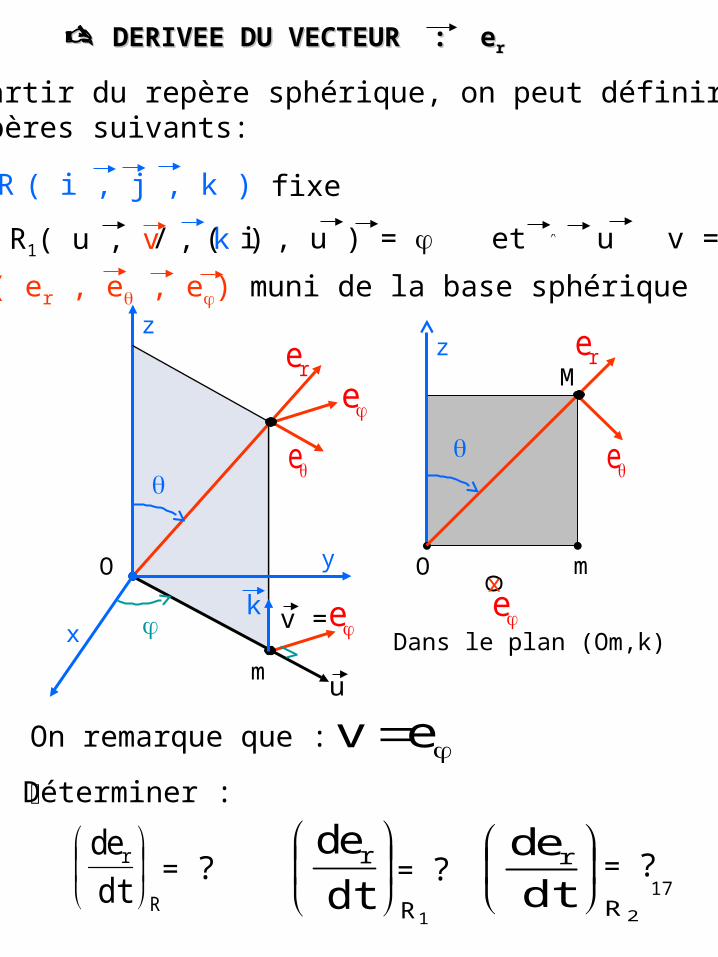
DERIVEE DU VECTEUR : eDERIVEE DU VECTEUR : err
A partir du repère sphérique, on peut définir les repères suivants:
R ( i , j , k )
R1( u , v , k )
R2( er , e , e) muni de la base sphérique
fixe
/ ( i , u ) = et u v = k
On remarque que :
Déterminer :
1R
r
dt
ed
= ?
2R
r
dt
ed
= ?
ev
= ?R
r
dt
ed
m
z
re
e
O
e
M
re
e
z
O mxe
Dans le plan (Om,k)
e
u
v =x
y
k
18
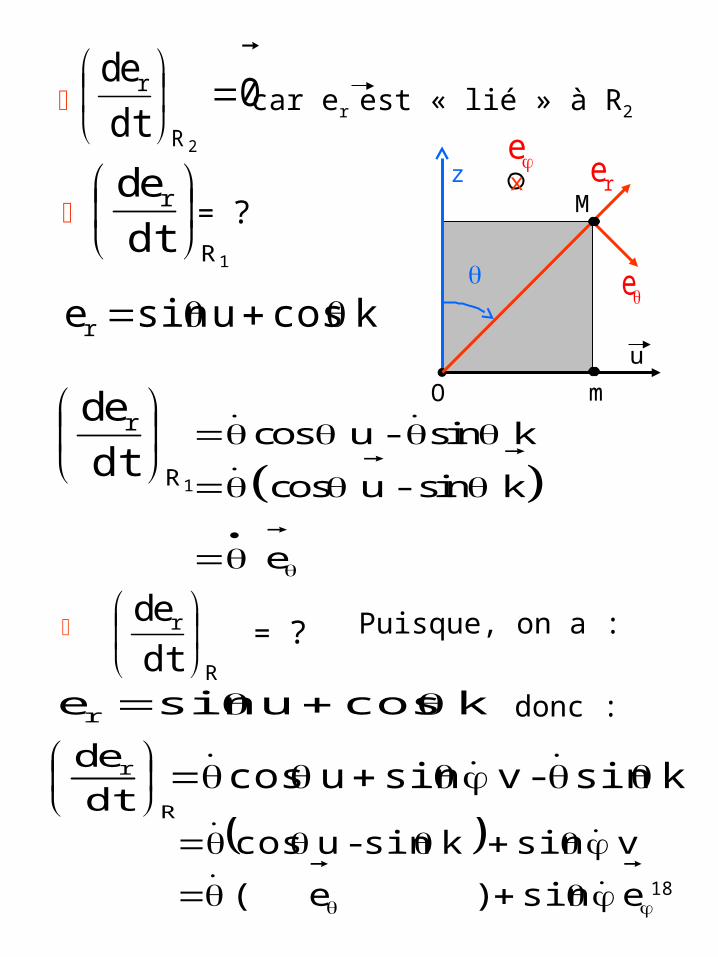
car er est « lié » à R20
dt
ed
2R
r
1R
r
dt
ed
k cos u siner
1R
r
dt
ed
= ? M
re
e
z
O m
xe
cos u - sin k
cos u - sin k
e
u
= ? Puisque, on a :
R
r
dt
ed
k cos u siner
donc :
k sin - v sin u cos
R
r
dt
ed
e sin ) e (
v sin k sin - u cos
19
RELATION ENTRERELATION ENTRE
( er , e , e) et ( i , j , k )
er
eer ٨ e
= +u v k+ ( er k )
( er u ) ( er v )
cos er= +u ksin
Et puisque, on a : u = cosi + sinj
donc : er = sincosi + sin sin j + cos k
Dans la base ( u , v , k ) , er peut s’écrire :
Soit :
e = coscosi + cos sin j - sin k
De la même façon, on obtient :
Et la relation : , nous donne :
e = - sini + cos j
Expression du rayon vecteur OM
Dans R2 : OM = /OM/ er = r er
Dans R1 :
Dans R :
r cos OM=
+u kr sin
OM = rsincosi +rsinsin j +rcos k
1R
r
d
ede
ou bien, on peut remarquer :
20
VITESSE ET ACCELERATION DE MVITESSE ET ACCELERATION DE M
R
R/ dt
OMd)M(V
On a :
R
rr
R
rR/ dt
edre
dt
dr
dt
erd)M(V
R
r
dt
ed
et on a démontré que :
e sin e
Et l’accélération de M par rapport à R :
R
R/R/ dt
)M(Vd)M(
Et puisque : OM = r er , donc :
e sin re r e r)M(V rR/
21
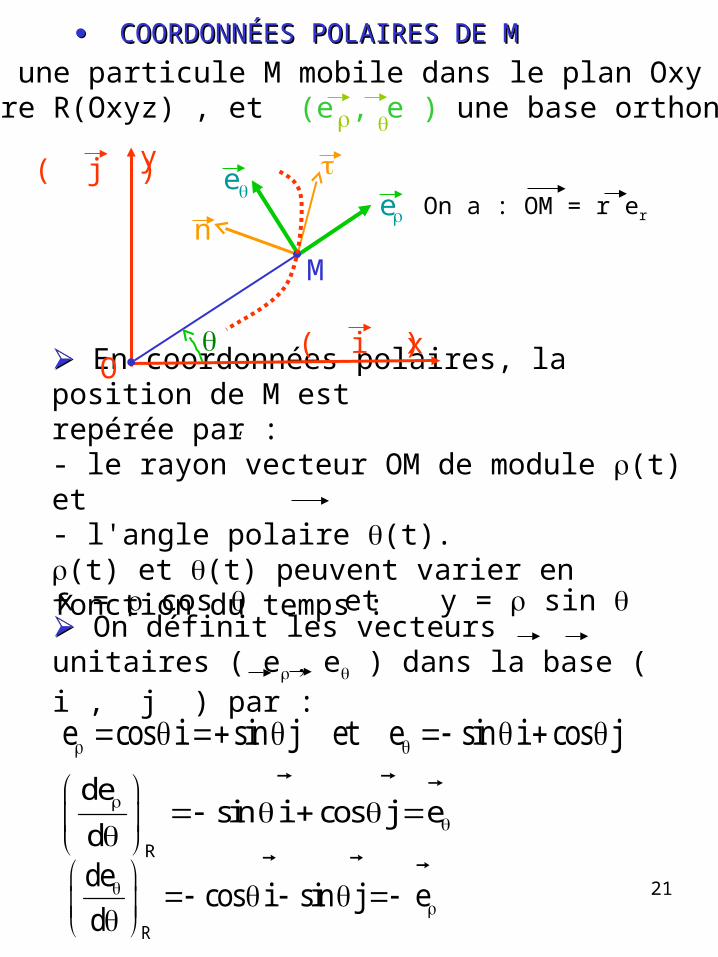
COORDONNÉES POLAIRES DE MCOORDONNÉES POLAIRES DE M
En coordonnées polaires, la position de M est repérée par :- le rayon vecteur OM de module (t) et - l'angle polaire (t). (t) et (t) peuvent varier en fonction du temps : x = cos et y = sin
,
On définit les vecteurs unitaires ( e e ) dans la base ( i , j ) par :
ee
n
M
x
y
O
( j )
( i )
Soit une particule M mobile dans le plan Oxy du repère R(Oxyz) , et (e , e ) une base orthonormée.
e cos i sin j et e sin i cos j
R
desin i cos j e
d
R
decos i sin j e
d
On a : OM = r er
22
Dans la base des coordonnées polaires le vecteur position s'écrit :
VITESSE ET ACCELERATION
eOM
R
R/ dt
OMd)M(V
RR/ )e
dt
de
dt
d(
dt
d)M(
R/)M(V
edt
d
e
dt
d
e) 2 (e) ()M( 2 Remarques :
Dans le cas où dépend du temps, les accélérations radiale et orthoradiale sont
différentes de celles normale et orthonormale.
Dans le cas où est une constante (mouvement circulaire), on aura :
e = et e= - n
23
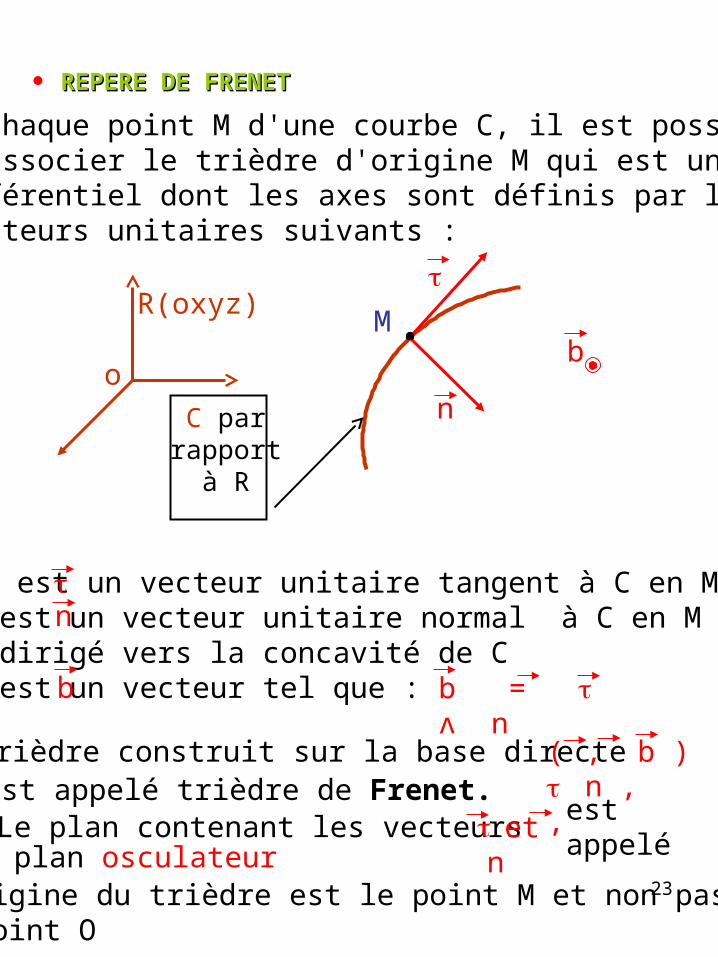
REPERE DE FRENETREPERE DE FRENET
A chaque point M d'une courbe C, il est possibled'associer le trièdre d'origine M qui est un référentiel dont les axes sont définis par les vecteurs unitaires suivants :
Le trièdre construit sur la base directe est appelé trièdre de Frenet.
est appelé
Le plan contenant les vecteurs
b = ʌ n
est un vecteur unitaire tangent à C en Mest un vecteur unitaire normal à C en Mdirigé vers la concavité de Cest un vecteur tel que :
n
b
M
n
b
, n ,( ,
b )
et n plan osculateur
C par rapport à R
L'origine du trièdre est le point M et non pas le point O
R(oxyz)
o
24
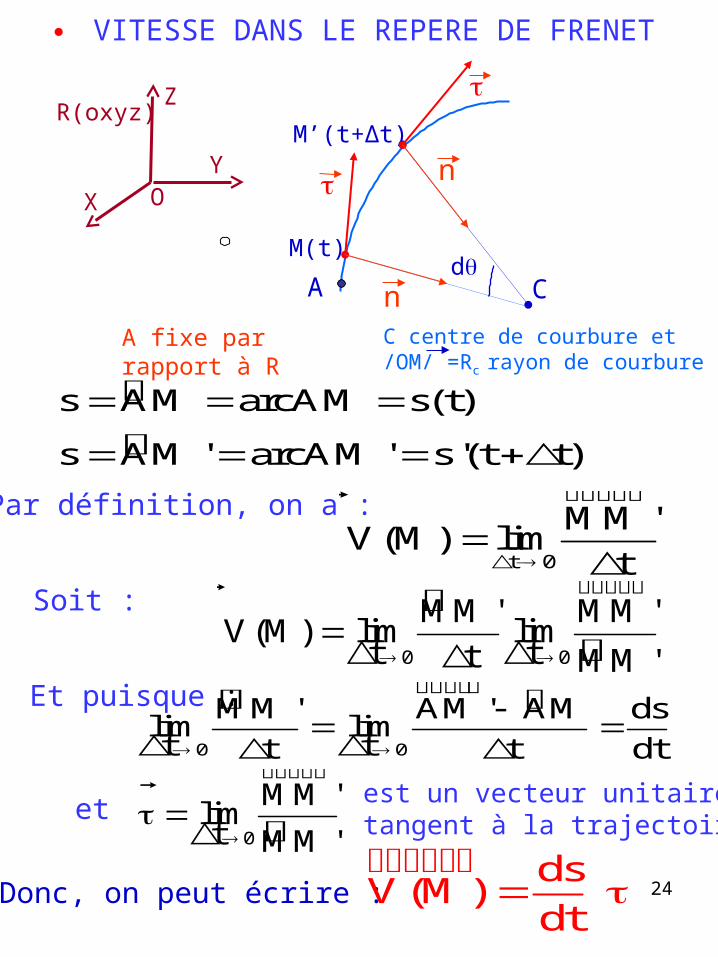
VITESSE DANS LE REPERE DE FRENET
Par définition, on a :
t 0
MM 'V(M) lim
t
""""""""""""""""""""""""""""
Soit :
est un vecteur unitaire tangent à la trajectoire
0 0
MM ' MM 'V(M) lim lim
t tt MM '
""""""""""""""""""""""""""""
A fixe par rapport à R
OX
Y
ZR(oxyz)
M(t)
M’(t+Δt)
n
nd
C centre de courbure et /OM/ =Rc rayon de courbure
CA
0 0
MM ' AM ' AM dslim limt tt t dt
""""""""""""""
0
MM 'limt MM '
""""""""""""""
s AM arcAM s(t)
s AM ' arcAM ' s '(t t)
Et puisque :
et
Donc, on peut écrire :ds
V(M) dt
""""""""""""""""""""""""""""
25
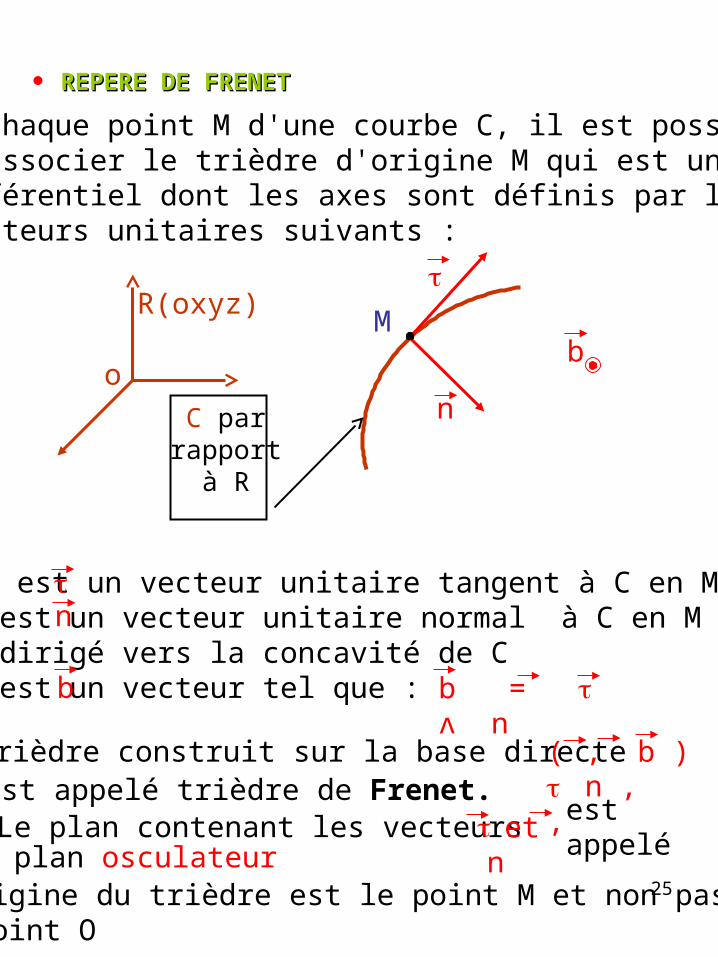
REPERE DE FRENETREPERE DE FRENET
A chaque point M d'une courbe C, il est possibled'associer le trièdre d'origine M qui est un référentiel dont les axes sont définis par les vecteurs unitaires suivants :
Le trièdre construit sur la base directe est appelé trièdre de Frenet.
est appelé
Le plan contenant les vecteurs
b = ʌ n
est un vecteur unitaire tangent à C en Mest un vecteur unitaire normal à C en Mdirigé vers la concavité de Cest un vecteur tel que :
n
b
M
n
b
, n ,( ,
b )
et n plan osculateur
C par rapport à R
L'origine du trièdre est le point M et non pas le point O
R(oxyz)
o
26
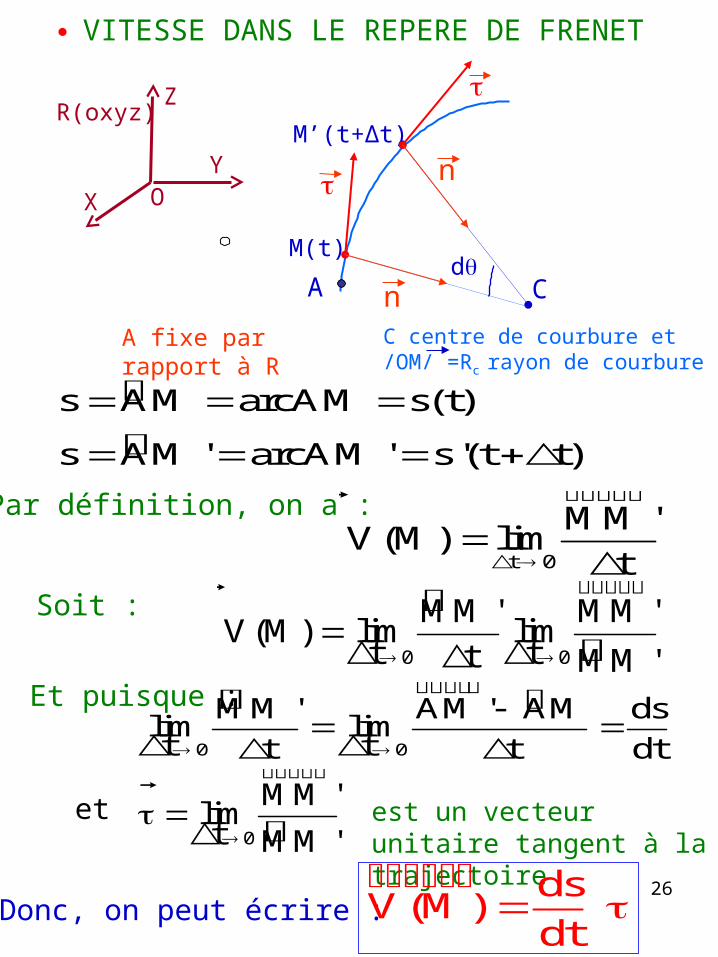
VITESSE DANS LE REPERE DE FRENET
Par définition, on a :
t 0
MM 'V(M) lim
t
""""""""""""""""""""""""""""
Soit :
est un vecteur unitaire tangent à la trajectoire
0 0
MM ' MM 'V(M) lim lim
t tt MM '
""""""""""""""""""""""""""""
A fixe par rapport à R
OX
Y
ZR(oxyz)
M(t)
M’(t+Δt)
n
nd
C centre de courbure et /OM/ =Rc rayon de courbure
CA
0 0
MM ' AM ' AM dslim limt tt t dt
""""""""""""""
0
MM 'limt MM '
""""""""""""""
s AM arcAM s(t)
s AM ' arcAM ' s '(t t)
Et puisque :
et
Donc, on peut écrire :ds
V(M) dt
""""""""""""""""""""""""""""
27
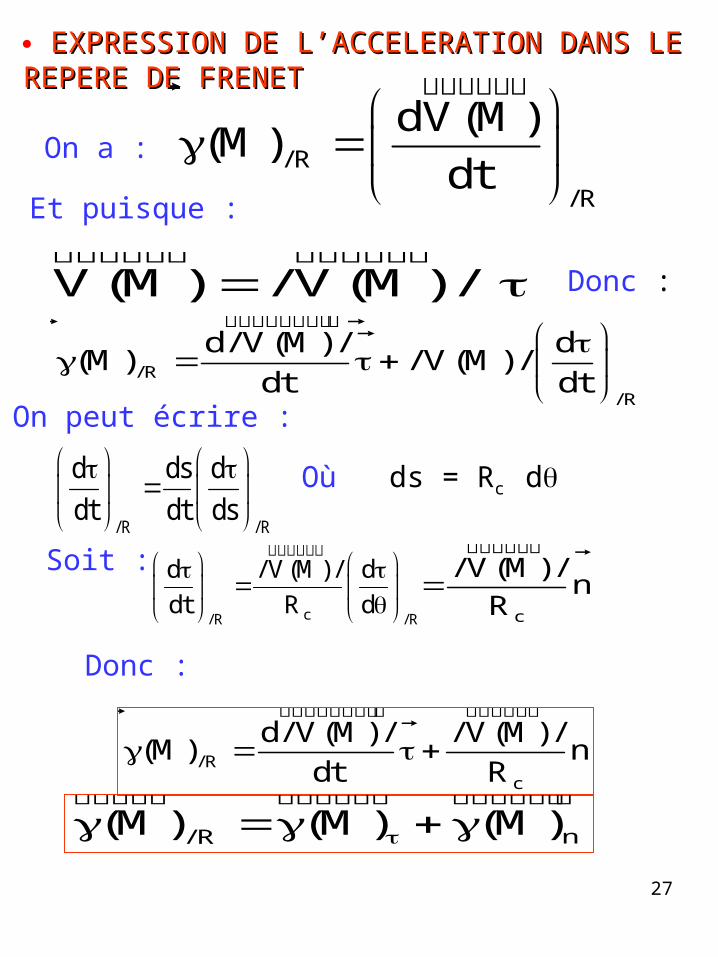
EXPRESSION DE L’ACCELERATION DANS LEEXPRESSION DE L’ACCELERATION DANS LEREPERE DE FRENETREPERE DE FRENET
V(M) / V(M) / """"""""""""""""""""""""""""""""""""""""""
On a : / R
/ R
dV(M)(M)
dt
""""""""""""""""""""""""""""
Et puisque :
/ R
/ R
d/ V(M) / d(M) / V(M) /
dt dt
""""""""""""""""""""""""""""""""""""""""""""""""""""""""
/ R / R
d ds d
dt dt ds
Donc :
On peut écrire :
Où ds = Rc d
Soit :
c/ R / R
d / V(M) / d
dt R d
"""""""""""""""""""""""""" ""
c
/ V(M) /n
R
""""""""""""""
Donc :
/ Rc
d/ V(M) / / V(M) /(M) n
dt R
""""""""""""""""""""""""""""""""""""""""""""""""""""""""
n/ R(M) (M) (M) """"""""""""""""""""""""""""""""""""""""""
28
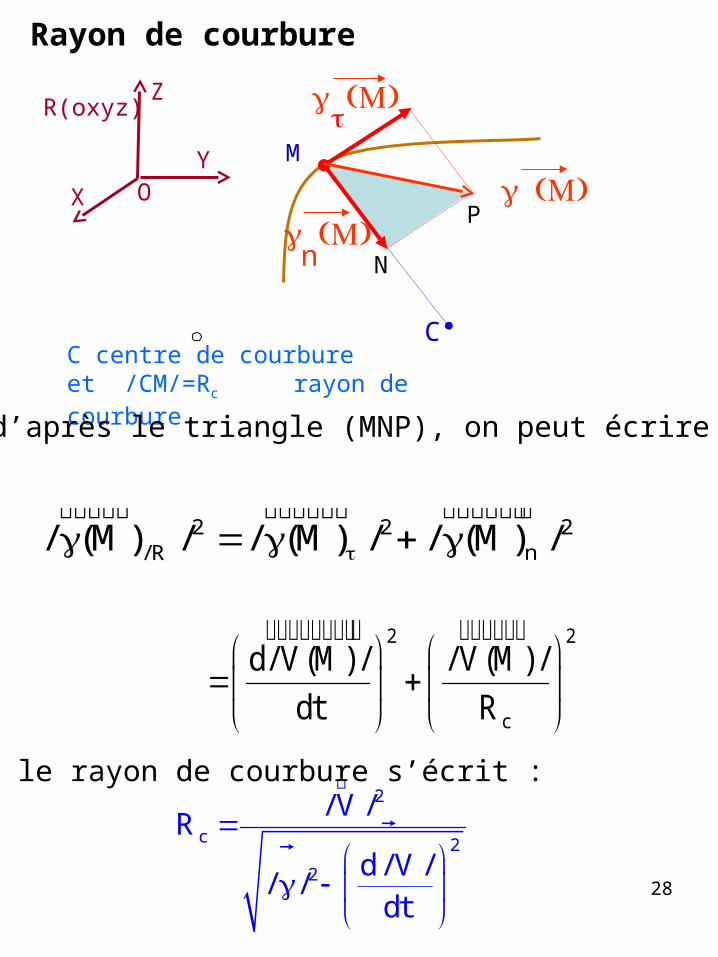
Rayon de courbure
OX
Y
ZR(oxyz)
C centre de courbure et /CM/=Rc rayon de courbure
M
C
n
2 2 2n/ R/ (M) / / (M) / / (M) /
""""""""""""""""""""""""""""""""""""""""""
Et d’après le triangle (MNP), on peut écrire :
N
P
2 2
c
d/ V(M) / / V(M) /
dt R
""""""""""""""""""""""""""""
2
c 2
2
/ V /R
d / V // /
dt
""""""""""""""
""""""""""""""
Et le rayon de courbure s’écrit :
29
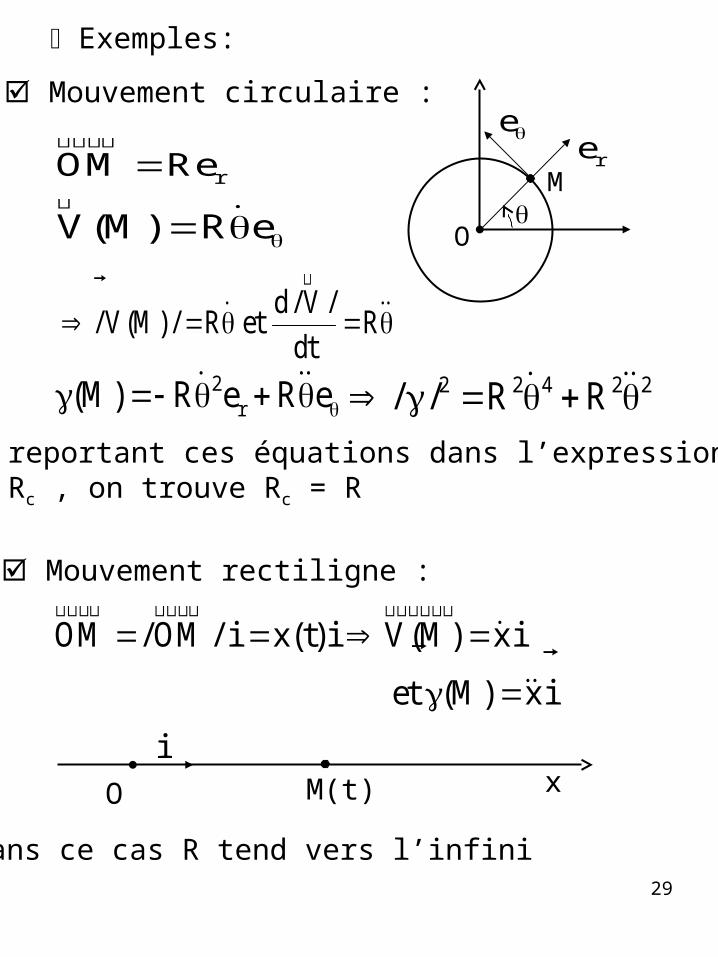
Exemples:
Mouvement circulaire :
rOM Re""""""""""""""
2r(M) R e R e
V(M) R e """"""""""""""
2 2 4 2 2/ / R R
d / V // V(M) / R et R
dt
""""""""""""""""""""""""""""
En reportant ces équations dans l’expression de Rc , on trouve Rc = R
Mouvement rectiligne :
OM / OM / i x(t) i V(M) xi
et (M) xi
""""""""""""""""""""""""""""""""""""""""""
""""""""""""""
Dans ce cas R tend vers l’infini
xM(t)i
O
O
M
ree
30
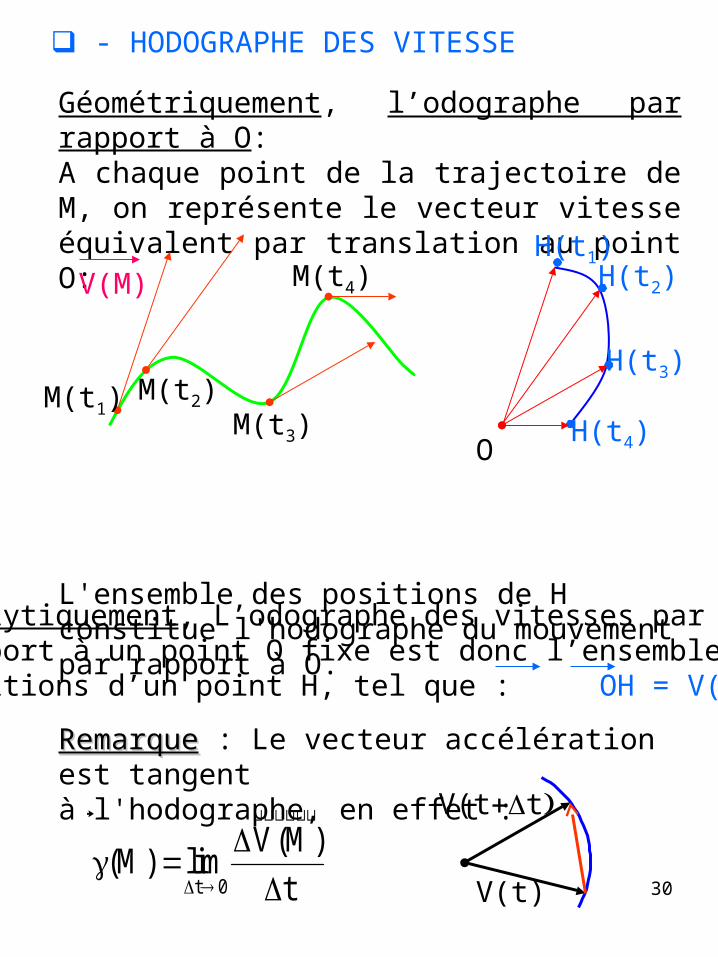
- HODOGRAPHE DES VITESSE
Géométriquement, l’odographe par rapport à O:A chaque point de la trajectoire de M, on représente le vecteur vitesse équivalent par translation au point O:
L'ensemble des positions de H constitue l'hodographe du mouvement par rapport à O.
O
M(t1) M(t2)M(t3)
M(t4)H(t1)
H(t2)
H(t3)
H(t4)
V(M)
RemarqueRemarque : Le vecteur accélération est tangent à l'hodographe, en effet :
t 0
V(M)(M) lim
t
""""""""""""""""""""""""""""
V(t)
V(tt
Analytiquement, L’odographe des vitesses par rapport à un point O fixe est donc l’ensemble des positions d’un point H, tel que : OH = V(M)
31
Exemple à faire
32
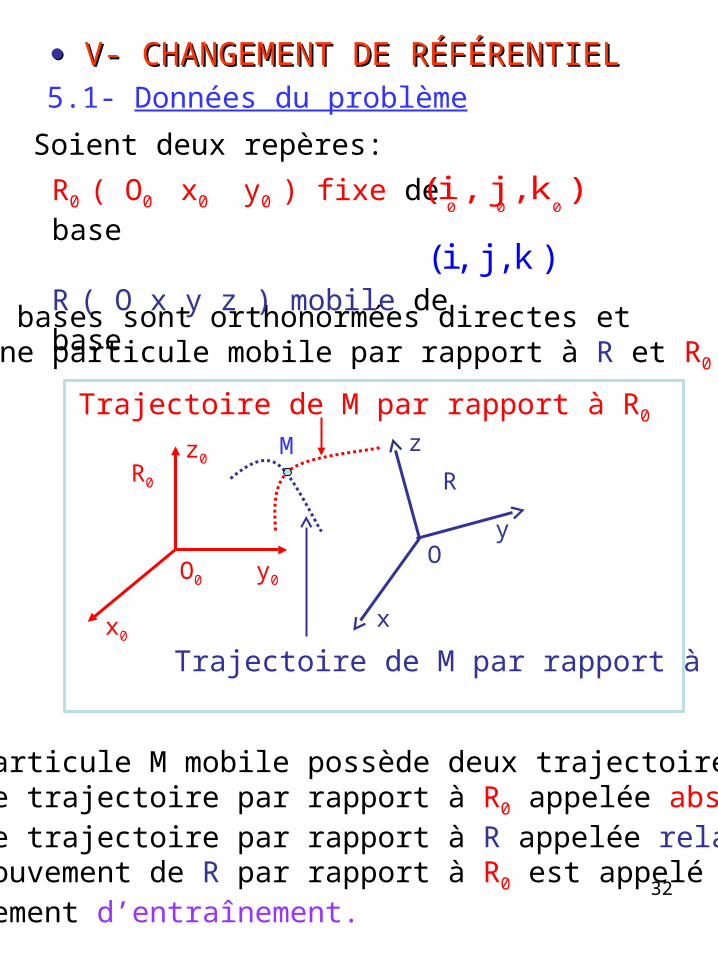
V- CHANGEMENT DE RÉFÉRENTIELV- CHANGEMENT DE RÉFÉRENTIEL5.1- Données du problème
Soient deux repères:
Les bases sont orthonormées directes et M une particule mobile par rapport à R et R0 :
R0 ( O0 x0 y0 ) fixe de base
R ( O x y z ) mobile de base
0 0 0( i , j , k )
( i , j , k )
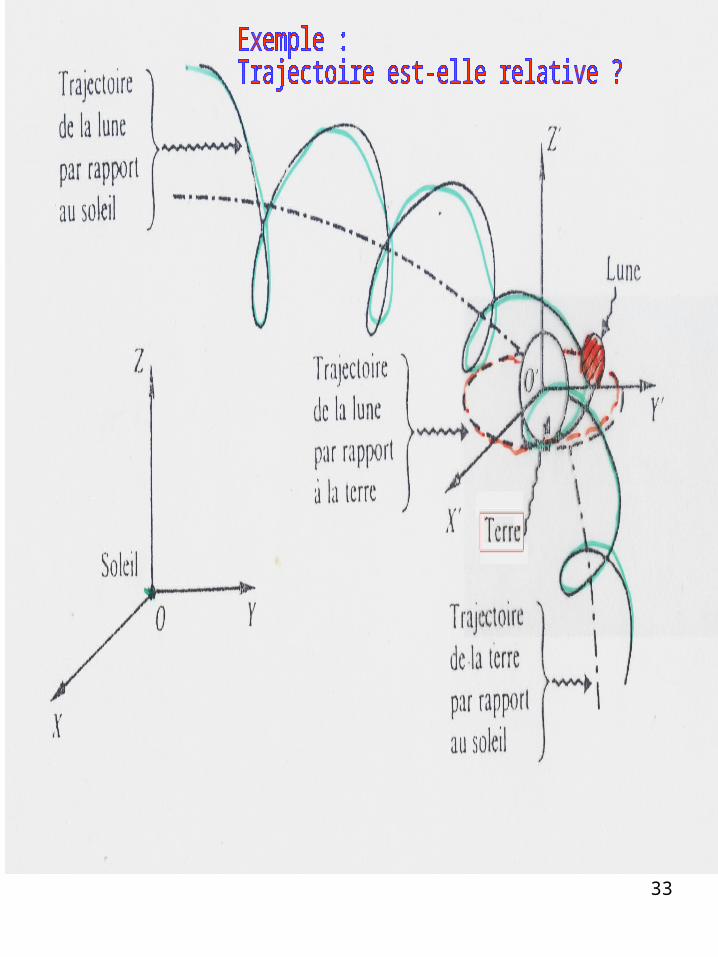
La particule M mobile possède deux trajectoires :- une trajectoire par rapport à R0 appelée absolue- une trajectoire par rapport à R appelée relative.Le mouvement de R par rapport à R0 est appelé mouvement d’entraînement.
M
OO0
R0 R
y0
x0
z0z
y
x
Trajectoire de M par rapport à R
Trajectoire de M par rapport à R0
33
34
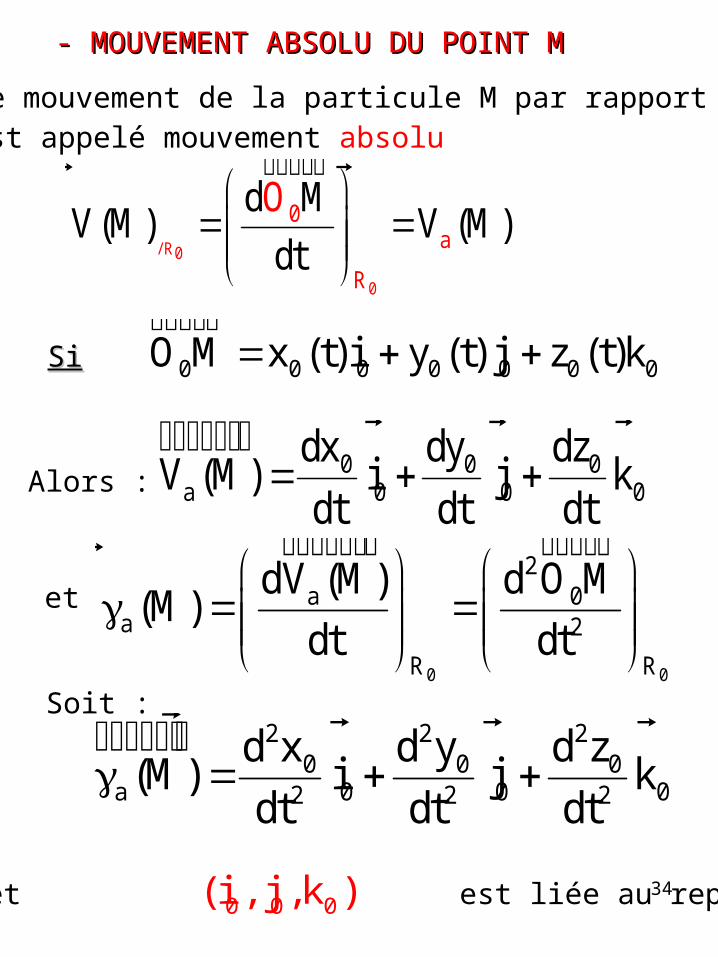
- MOUVEMENT ABSOLU DU POINT M- MOUVEMENT ABSOLU DU POINT M
Le mouvement de la particule M par rapport à R0 est appelé mouvement absolu
/ R0
0
0a
R
d MV(M) V (M)
d
O
t
""""""""""""""""""""""""""""""""""""""""""
SiSi 0 0 0 0 0 0 0O M x (t) i y (t) j z (t)k """"""""""""""
Alors :0 0 0
a 0 0 0
dx dy dzV (M) i j k
dt dt dt
""""""""""""""
En effet est liée au repère R00 0 0( i , j , k )
2 2 20 0 0
a 0 0 02 2 2
d x d y d z(M) i j k
dt dt dt """"""""""""""
et
0 0
2a 0
a 2
R R
dV (M) d O M(M)
dt dt
""""""""""""""""""""""""""""""""""""""""""
Soit :
35
MOUVEMENT RELATIF DU POINT MMOUVEMENT RELATIF DU POINT M
Le mouvement de la particule M par rapport à R est appelé mouvement relatif. La vitesse relative s’écrit :
SiSi
Alors :
et
Soit :
/ R r
R
d MV(M) V (M)
dt
O
""""""""""""""""""""""""""""""""""""""""""
OM x(t) i y(t) j z(t)k """"""""""""""
r
dx dy dzV (M) i j k
dt dt dt
""""""""""""""
2r
r 2
RR
dV (M) d OM(M)
dt dt
"""""""""""""" """"""""""""""""""""""""""""
2 2 2
r 2 2 2
d x d y d z(M) i j k
dt dt dt """"""""""""""
En effet est liée au repère R( i , j, k)
36
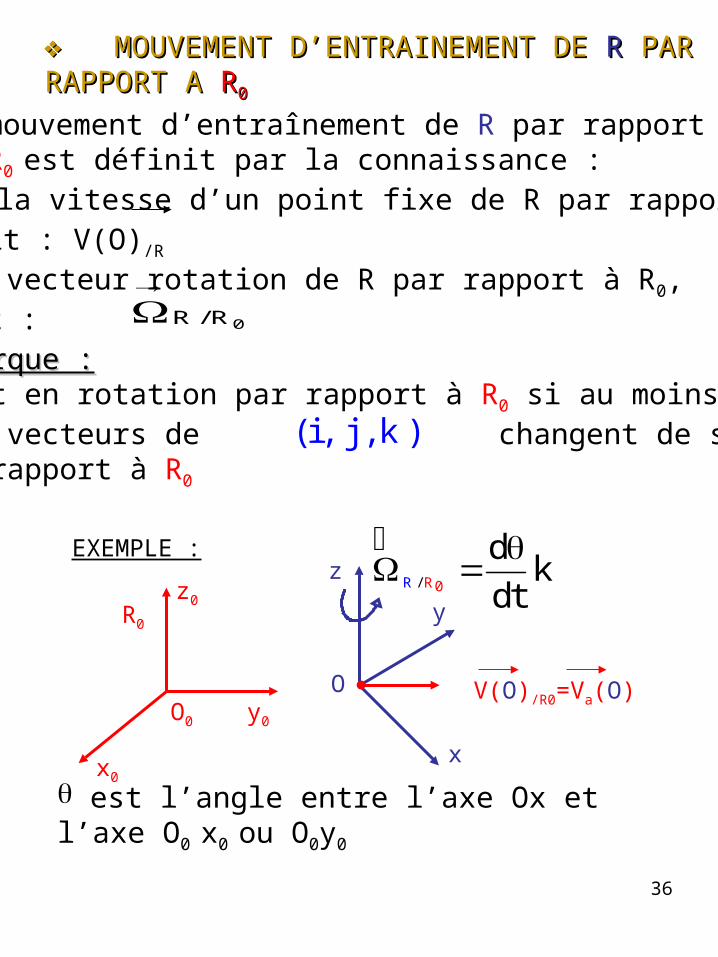
MOUVEMENT D’ENTRAINEMENT DE MOUVEMENT D’ENTRAINEMENT DE RR PAR PAR RAPPORT A RAPPORT A RR00
Le mouvement d’entraînement de R par rapport à R0 est définit par la connaissance :de la vitesse d’un point fixe de R par rapport à R0, soit : V(O)/R
du vecteur rotation de R par rapport à R0, soit : 0R / R
OO0
R0
V(O)/R0=Va(O)y0
x0
z0
z
y
x
Remarque :Remarque :R est en rotation par rapport à R0 si au moins deux vecteurs de changent de sens par rapport à R0
( i , j , k )
EXEMPLE :R0/R
dk
dt
""""""""""""""""""""""""""""
est l’angle entre l’axe Ox et l’axe O0 x0
ou O0y0
37
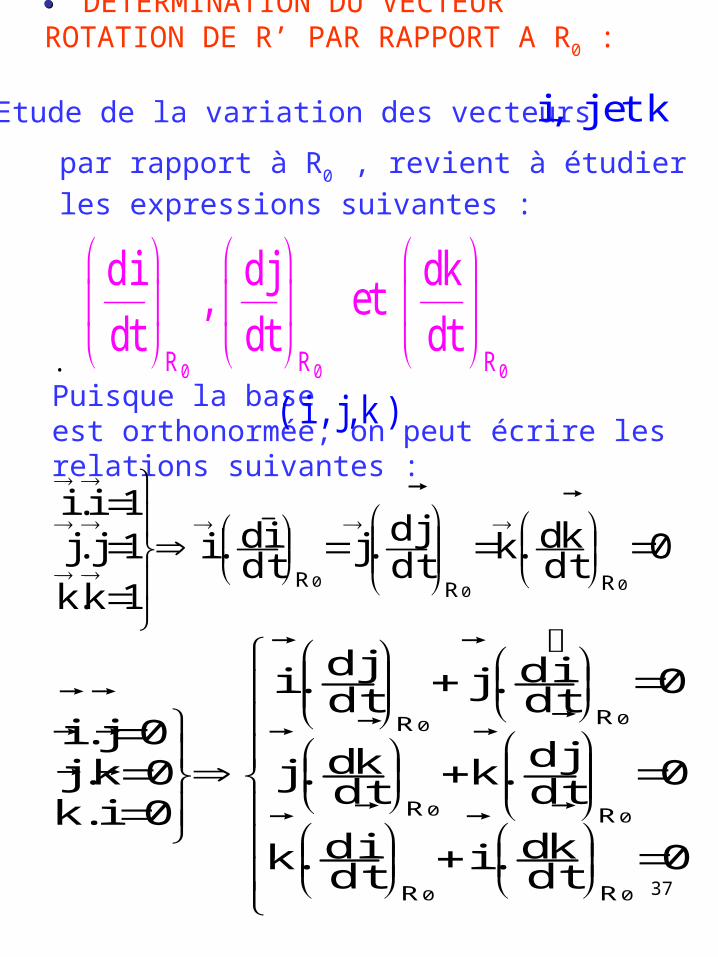
DETERMINATION DU VECTEUR ROTATION DE R’ PAR RAPPORT A R0 :
1.Etude de la variation des vecteurs
par rapport à R0 , revient à étudier les expressions suivantes :
0 0 0R R R
di dj dk, et
dt dt dt
.Puisque la base est orthonormée, on peut écrire les relations suivantes :
( i , j, k )
0dtkd.k
dtjd.j
dtid.i
1k.k
1j.j1i.i
000 RRR
0dtkd.i
dtid.k
0dt
jd.kdtkd.j
0dt
id.jdt
jd.i
0i.k0k.j0j.i
00
00
00
RR
RR
RR
T
i, j et k
38
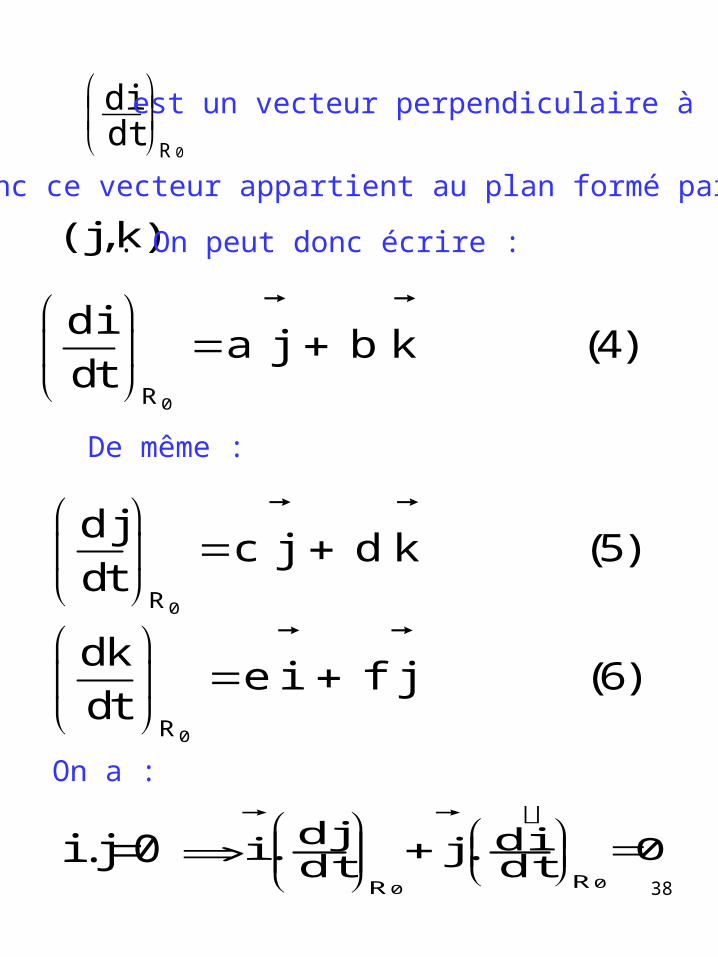
0Rdt
id
est un vecteur perpendiculaire à
donc ce vecteur appartient au plan formé par
( j, k)
. On peut donc écrire :
0R
dia j b k (4)
dt
0R
d jc j d k (5)
dt
0R
dke i f j (6)
dt
De même :
On a :
0dt
id.jdt
jd.i00 RR
T0j.i
39
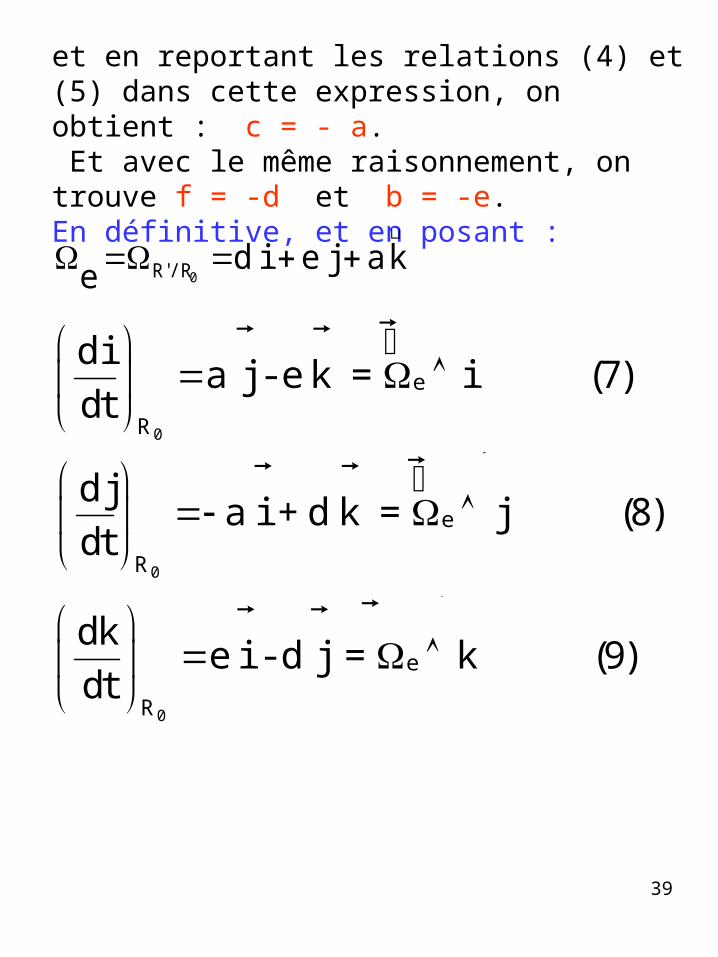
et en reportant les relations (4) et (5) dans cette expression, on obtient : c = - a. Et avec le même raisonnement, on trouve f = -d et b = -e. En définitive, et en posant :
k a j ei d e 0/RR'
T
0
e
R
dia j - e k = i (7)
dt
"""""""""""""""""""""""""" ""
0
e
R
d ja i + d k = j (8)
dt
"""""""""""""""""""""""""" ""
0
e
R
dke i - d j = k (9)
dt
"""""""""""""""""""""""""" ""
40
k
j
i
0de
d0a
ea0
dt
kd
dt
jd
dt
id
0
0
0
R
R
R
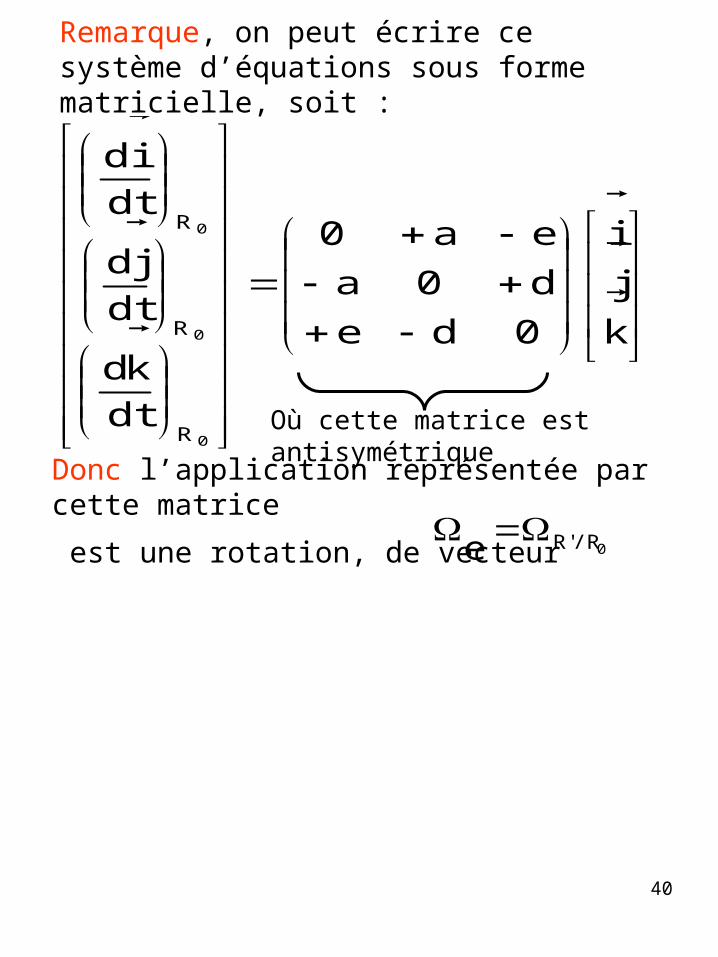
Donc l’application représentée par cette matrice
est une rotation, de vecteur
Où cette matrice est antisymétrique
0/RR' e
Remarque, on peut écrire ce système d’équations sous forme matricielle, soit :
41
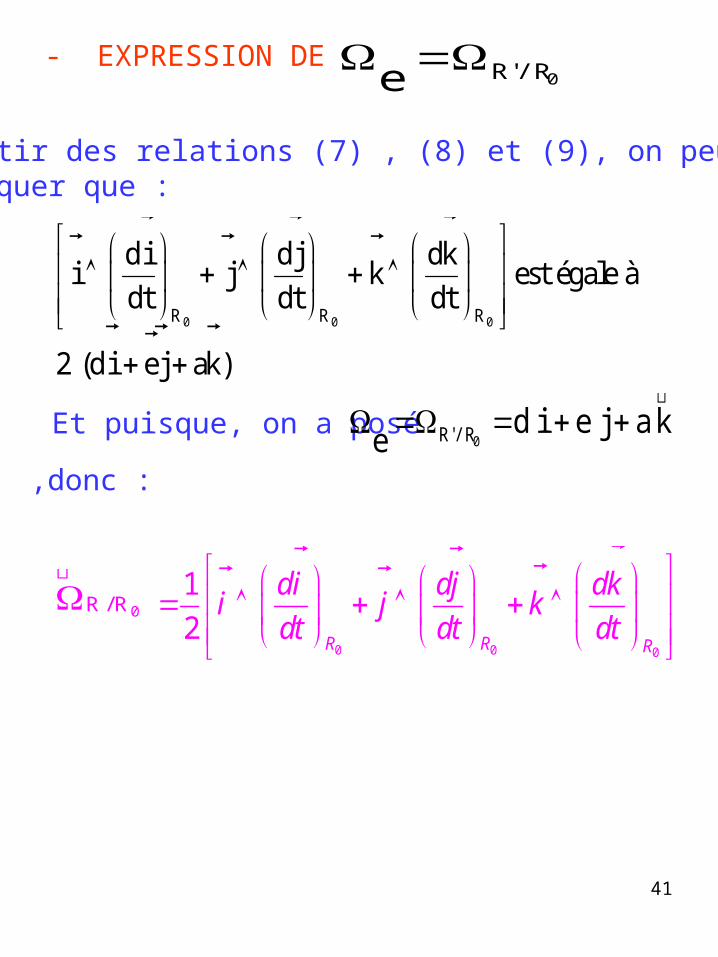
- EXPRESSION DE 0/RR'
e
A partir des relations (7) , (8) et (9), on peut remarquer que :
0 0 0R R R
di dj dki j k est égale à
dt dt dt
2 (di ej ak)
Et puisque, on a posé k a j ei d e 0/RR'
T
,donc :
0 0 0
1
2R R R
di dj dki j k
dt dt dt
0R / R
""""""""""""""
42
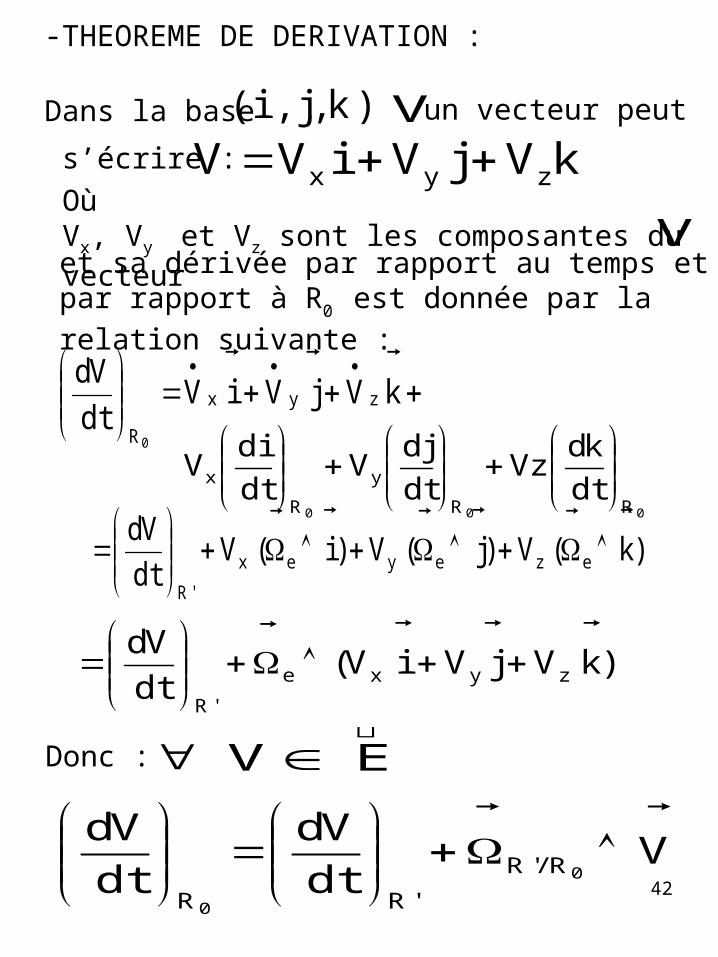
-THEOREME DE DERIVATION :
Dans la base ) k ,j , i (
, un vecteur peut
V
s’écrire : x y zV V i V j V k
et sa dérivée par rapport au temps et par rapport à R0 est donnée par la relation suivante :
Où Vx, Vy et Vz sont les composantes du vecteur
V
kVjViVdt
Vdzyx
R0
000 RR
y
R
x dt
kdVz
dt
jdV
dt
idV
)k( V)j( V)i( Vdt
Vdezeyex
'R
)k VjVi V(dt
Vdzyxe
'R
Vdt
Vd
dt
Vd0
0
R/'R
'RR
Donc : V E """"""""""""""
43
DECOMPOSITION DES VITESSESDECOMPOSITION DES VITESSESLa vitesse de M par rapport à R0 est la vitesse absolue de M, On a :
0
0
0a/ R
R
dO MV(M) V (M)
dt
""""""""""""""""""""""""""""""""""""""""""
On a :
Et d’après la relation ( ), on peut écrire :
0 0O M O O OM """"""""""""""""""""""""""""""""""""""""""Et puisque :
Donc :
00
0a
RR
dO O dOMV (M)
dt dt
"""""""""""""" """"""""""""""""""""""""""""
0
a a
R
dOMV (M) V (O)
dt
""""""""""""""""""""""""""""""""""""""""""
Et on obtient :
0
0
R / R
R R
dOM dOMOM
dt dt
""""""""""""""""""""""""""""""""""""""""""""""""""""""""
0R / Ra r aV (M) V (M) V (O) OM """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
44
Soit :
0R / RaV (O) OM """"""""""""""""""""""""""""""""""""""""""
Puisque l’entraînement de R/R0 est caractérisé par la vitesse absolue de O et la rotation de R/R0 ,
Le terme représente la Vitesse d’entraînement de R/R0 , on pose donc :
a r e 0V (M) V (M) V (R / R ) """"""""""""""""""""""""""""""""""""""""""
0R / Re 0 aV (R / R ) V (O) OM """"""""""""""""""""""""""""""""""""""""""""""""""""""""
La vitesse d’entraînement est donc équivalente à la vitesse absolue de la trace (point coïncidant)de M dans R.
0
0e 0
R
dO MV (R / R ) avec M fixe dans R
dt
""""""""""""""""""""""""""""
0
0a r e 0
R
dO MV (M) V (M) V (R / R )
dt
""""""""""""""""""""""""""""""""""""""""""""""""""""""""
Remarque :Remarque :
On a :
SiSi M est fixe dans R alors et dans ce casOn peut écrire :
rV (M) 0""""""""""""""
45
COMPOSITION DES ACCELERATIONSCOMPOSITION DES ACCELERATIONS
0 0
2a 0
a 2
R R
dV d O M
dt dt
""""""""""""""""""""""""""""""""""""""""""
0R / Ra r aV (M) V (M) V (O) OM """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
0
aa
R
dV (O)(O)
dt
""""""""""""""""""""""""""""
0 0
0
0 0 0
R / R R / RR / R
R R R
d( OM) d dOMOM
dt dt dt
""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
Et on a :
Par définition :
0
0
rrR / R r
RR
dV (M) dV (M)V (M)
dt dt
"""""""""""""" """"""""""""""""""""""""""""""""""""""""""
Et puisque :
0R / R rr (M) V (M) """""""""""""""""""""""""" ""
0
0
R / R
R R
dOM dOMOM
dt dt
""""""""""""""""""""""""""""""""""""""""""""""""""""""""
0R / Rr V (M) OM """"""""""""""""""""""""""""""""""""""""""
Et on a:
46
ra )(M) (M
r ea c ((M) MM )) (( M)
a rd
(O) OM OMdt
2 V (M)
""""""""""""""
""""""""""""""""""""""""""""""""""""""" """ """"""""""""""""""""""""""""""""""""""""""
D’après ces relations, l’expression de l’accélération absolue de M, s’écrit :
e a
d(O) (O) OM OM
dt
"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" """"
rc (M) 2 V (M) """""""""""""""""""""""""" ""
Terme qui représente l’entraînement de R/R0
Terme Complémentaire« Coriolis »
On a donc :
Où :
est l’accélération d’entraînement de M et
est l’accélération de Coriolis de M.
Remarques :
Sachant que :
Montrer que : 0
e 0 ce
R
dV (R / R ) (M)(M)
dt 2
""""""""""""""
0R / Re a0V (R / R ) V (O) OM """"""""""""""""""""""""""""""""""""""""""""""""""""""""
47
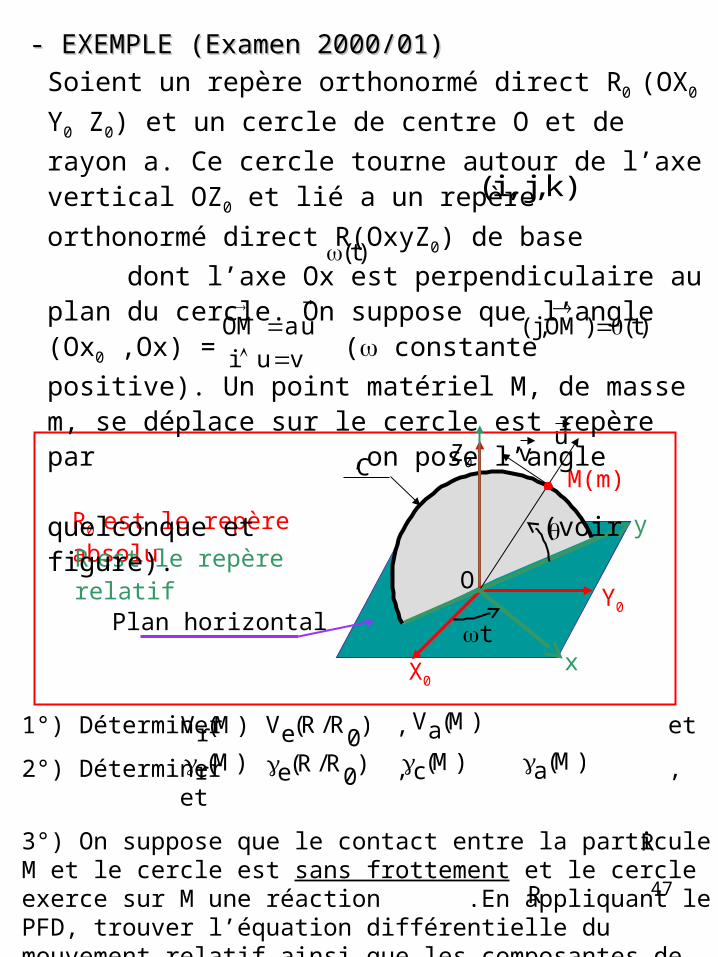
- EXEMPLE (Examen 2000/01)- EXEMPLE (Examen 2000/01)
1°) Déterminer , et
2°) Déterminer , , et
3°) On suppose que le contact entre la particule M et le cercle est sans frottement et le cercle exerce sur M une réaction .En appliquant le PFD, trouver l’équation différentielle du mouvement relatif ainsi que les composantes de la réaction .
)M(rV
)0
R/R(eV
)M(aV
)M(a
)M(c
)M(r
)0
R/R(e
R
R
y
x
M(m)
O
X0
Y0
CZ0
t
uv
R0 est le repère absolu
R est le repère relatif
Soient un repère orthonormé direct R0 (OX0 Y0 Z0) et un
cercle de centre O et de rayon a. Ce cercle tourne autour de l’axe vertical OZ0 et lié a un repère
orthonormé direct R(OxyZ0) de base dont l’axe
Ox est perpendiculaire au plan du cercle. On suppose que l’angle (Ox0 ,Ox) = ( constante positive). Un
point matériel M, de masse m, se déplace sur le cercle est repère par ,on pose l’angle quelconque et (voir figure).
)k,j,i(
u a OM
)t()OM,j(
)t(
vui
Plan horizontal
48
XX00
YY00
ZZ00
xx
yy
tt
M(m)M(m)
OO
uuvv
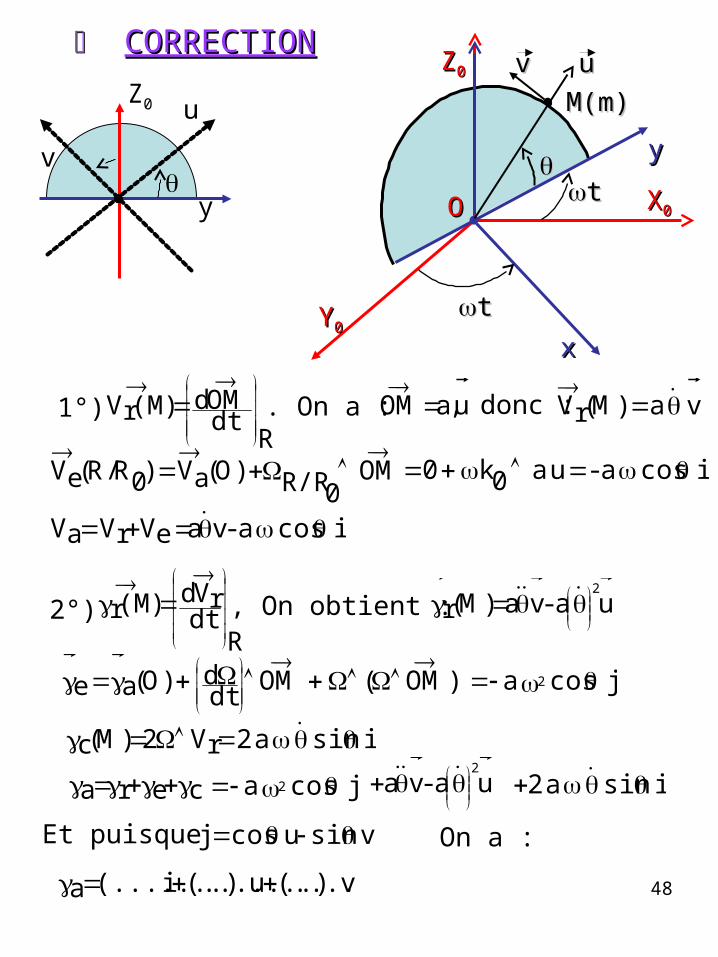
1°) R
dtOMd(M)rV
u aOM
v a )M(rV
OM
0R/R )O(aV )0R/R(eV
u a 0k 0
i cos a -
i cos a -va eVrV aV
2°) R
dtrVd(M)r
ua -va)M(r
2
i sin a 2 rV2)M(c
y
Z0 u
v
v sinu cos j
)OM( OMdtd )O(a e
j cos a 2
j cos a 2
cera
ua -va
2
i sin a 2
v(.......)u(.......)i(.......)a
CORRECTIONCORRECTION
Et puisque On a :
. On a : , donc :
, On obtient :
tt