Embed Size (px)
Citation preview

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE SETIF-1
MEMOIRE
Présenté à la Faculté des Sciences
Département de Physique
Pour l’obtention du Diplôme de
MAGISTER
Option : Energies Renouvelables
Par
IMAKHLAF Anis
Thème
Analyse d’un problème inverse de conduction-convection forcée dans un
échangeur de chaleur
Soutenu le : 06 /11/ 2013
Devant le jury composé de:
Président: Dr A. HAROUN Professeur Université Sétif 1
Rapporteur: Dr M. GUELLAL Maître de conférences A Université Sétif 1
Examinateur : Dr M. CHEGAAR Professeur Université Sétif 1
Examinateur : Dr S. NACEF Professeur Université Sétif 1
2013

Remerciements
Je tiens tout d’abord à remercier Dieu le tout Puissant qui m’a donné le courage et
la persévérance pour la réalisation de ce modeste mémoire
Je tiens à remercier Monsieur M. GUELLAL pour son aide, ses conseils
considérables et précieuses et d’avoir donné le maximum de son savoir et de son
temps pour contribuer à la réussite de ce modeste travail.
Aussi je tiens à remercier Monsieur M. AFRID pour son aide et son grand soutien.
Aussi je remercie en rendant un grand hommage aux membres de ma grande famille
et mes amis, ainsi qu’aux personnes qui m’ont encouragé et tous les enseignants qui
m’ont sculpté pour arriver à ce niveau avancé d’étude;
Et sans oublier, je remercie les membres du jury d’avoir accepté d’évaluer ce
modeste travail.

Table des Matières
Nomenclature
Liste des figures et tableaux
Introduction générale ……………………………………………………………………… 1
Chapitre I : Généralités et synthèse bibliographique ………………………………….... 3
I-1- Introduction………………………………………………………………………... 4
I-2- Généralités sur les problèmes thermiques inverses………………………………... 5
I-2-1- Problèmes directs en conduction thermique …………………………………. 6
I-2-2- Méthode du gradient conjugué ……………………………………………….. 6
I-3-Méthodes inverses en conduction de la chaleur……………………………………. 7
I-3-1- Problèmes inverses rétrogrades de la conduction de la chaleur……..………… 8
I-3-2- Problèmes inverses pour l’estimation/identification de conditions aux limites... 8
I-3-3- Problèmes inverses pour l’estimation des paramètres caractéristiques
du milieu………………………………………………………………………... 8
I-3-4- Problèmes inverses de design…………………………………………………. 8
I-4- Méthodes inverses en convection …………………………………………………. 8
I-5- Méthodes inverses en conduction-convection ………………………………………. 9
I-6- Méthodes d’optimisation ……………………………………………………………. 15
I-6-1- Méthode de la descente.………………………………………………………… 16
I-6-2- Méthode du gradient.………………………………………………………..... 18
I-6-3- Méthode du gradient conjugué.……………………………………………….. 18
I-6-4- La fonction de sensibilité.………………………………………………………. 20
I-6-5- La méthode de l’état adjoint.………………………………………………….. 20
I-7- Conclusion ………………………………………………………………………. 20
Chapitre II : Développement analytique et résolution numérique
du problème direct de la convection forcée ………………………………. 21
II-1- Développement mathématique………………………………………….…………... 22
II-1-1- Cas d’un écoulement dans un canal à plaques parallèles……………………… 22
II-1-2- Cas d’un écoulement dans une conduite cylindrique…………………….…… 27
II-2- Développement numérique…………………………………………………………. 30
II-2-1- Principe du calcul numérique par différences finies…………………………... 30
II-2-2- Application au cas d’une conduite à plaques parallèles……………………….. 33
II-2-3- Application au cas d’une conduite cylindrique……………………………….. 37
II-3- Résultats et discussions…………………………………………………………….. 43
II-4- Conclusion……………………………………………………………………….. 48
II-5- Partie du programme informatique du problème direct ……………….…..…….. 49
Chapitre III : Résolution du problème inverse par la méthode du gradient conjugué…51
III-1- Introduction………………………………………………………………………… 52
III-2-Problème inverse de la configuration plane ………………………………………... 53
III-2-1- La fonctionnelle J …………………………………………………...………... 54

III-2-2- Le problème sensitif……………...…………………………………………… 54
III-2-3- Problème adjoint et équations du gradient…………………………………….56
III-2-4- Gradient du critère……………………………………………………………. 63
III-2-5- Calcul du pas de la descente ………………………………..…………………63
III-2-6- Calcul de la descente ………………………………..……………………….. 64
III-3- Résolution numérique du problème inverse de la configuration plane……………. 64
III-3-1- Discrétisation de l’équation adjointe ………………………………………… 64
III-3-2- Equation de sensibilité ………………………………………………………. 67
III-4- Problème inverse de la configuration cylindrique ………………………………… 71
III-4-1- Problème sensitif ………………………………………………………...…… 71
III-4-2- Problème adjoint et équation du gradient ……………………………………. 72
III-5- Résolution numérique du problème inverse de la configuration cylindrique……… 77
III-5-1- Discrétisation des équations du problème direct……………………………... 77
III-5-2- Discrétisation de l’équation adjointe…………………………………………. 81
III-5-3- Discrétisation de l’équation de sensibilité……………………………………. 85
III-6- Application de la méthode du gradient conjugué pour la minimisation…………… 91
III-7- Organigramme de la procédure inverse …………………………………………… 94
III-8-Résultats et discussions……………………………………………………………... 95
III-9- Conclusion …………………………………………………………………….…... 103
III-10- Partie du programme informatique du problème inverse………………………….104
Conclusion générale …………………………………………………………….…………..106
Références bibliographiques.…………………………………………………………………108

Nomenclature
A : Diffusivité adimensionnelle
b : largeur du conduit (m)
d : direction de la descente
D1, D2 : largeur (m)
E : épaisseur du conduit (m)
J : fonction objectif
K : conductivité adimensionnelle
k : conductivité thermique
L : largeur du conduit (m)
: nombre de pas temporel
Pe : nombre de Peclet
Q : flux de chaleur adimensionnel
q : flux de chaleur (
: flux de référence
R : rayon interieur du conduit (m)
Re : nombre de Rynolds
T : température (K)
: température initiale (K)
t : emps (s)
U : vitesse du fluide (
X, Y : coordonnées adimensionnelles
x, y : coondonneés cartésiennes (m)
Z : température mesurée (K)

Symboles grecques
Indices et exposants
p : pème
itération
f : fluide
s : solide

Liste des figures et tableaux
Figure I.1. Paramètres volumiques et surfaciques ………….……………………………… 6
Figure I.2. Configuration du système de la conduite……………………………………… 10
Figure I.3. Configuration du système de la conduite……………………………………….. 10
Figure I.4. Algorithme de la méthode de résolution du problème inverse………………… 11
Figure I.5. Organigramme général de mise en œuvre d'une procédure inverse……………. 11
Figure I.6. Modélisation du problème par D. Maillet et A. Degiovanni……………………. 13
Figure I.7. Présentation du système par Y. Tamene et al…………………………………… 13
Figure I.8. Canal contenant un seul obstacle Chauffé……………………………………. 14
Figure II.1. Configuration du problème posé………………………………………………. 22
Figure II.2. Configuration du problème de géométrie cylindrique…………………………. 28
Figure II.3. Eléments de maillage du domaine de calcul en (i, j)…………………………... 33
Figure II.4. Variation du flux thermique en fonction de temps Configuration triangulaire…. 44
Figure II.5. Variation de l’erreur relative en fonction du temps Configuration triangulaire... 45
Figure II.6. Variation du flux thermique en fonction de temps (flux exact et calculé).
Configuration sinusoïdal……………………………………………………… 45
Figure II.7. Variation de l’erreur relative en fonction du temps Configuration sinusoïdal…. 45
Figure II.8. Variation du flux thermique en fonction de temps
Configuration spatio-temporelle……………………………………………….. 46
Figure II.9. Variation de l’erreur relative en fonction du temps
Configuration spatio-temporelle……………………………………………….. 46
Figure II.10. Distribution de température en fonction de la coordonnée vertical………….. 47
Figure II.1. Distribution du flux thermique en fonction des coordonnées X et Y
Configuration spatio-temporelle………………………………………………. 47
Figure II.12. Evolution du flux thermique en fonction du temps à différentes positions
verticale Y. Configuration spatio-temporelle……………………………….… 48
Figure III.1. Estimation du flux par l’analyse inverse pour . Fonction sinusoïdale…….. 95
Figure III.2. Estimation du flux par l’analyse inverse Résultats de David, T.W et al……... 96
Figure III.3. Estimation du flux par l’analyse inverse pour .
Fonction triangulaire…………………………………………………………... 96
Figure III.4. Estimation du flux par l’analyse inverse pour
Résultats de David, T.W et al…………………………………………………. 97
Figure III.5. Estimation du flux par l’analyse inverse pour .
Fonction sinusoïdale………………………………..…………………………..97
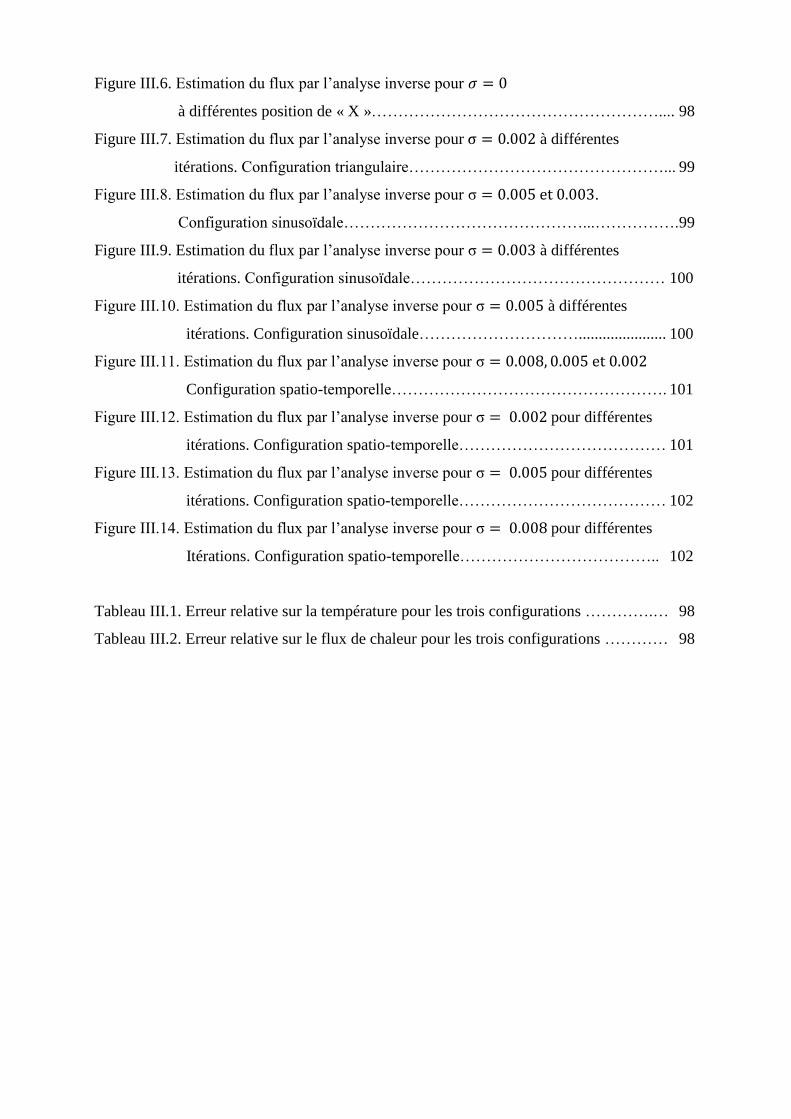
Figure III.6. Estimation du flux par l’analyse inverse pour
à différentes position de « X »……………………………………………….... 98
Figure III.7. Estimation du flux par l’analyse inverse pour à différentes
itérations. Configuration triangulaire…………………………………………... 99
Figure III.8. Estimation du flux par l’analyse inverse pour .
Configuration sinusoïdale………………………………………...……………. 99
Figure III.9. Estimation du flux par l’analyse inverse pour à différentes
itérations. Configuration sinusoïdale………………………………………… 100
Figure III.10. Estimation du flux par l’analyse inverse pour à différentes
itérations. Configuration sinusoïdale…………………………...................... 100
Figure III.11. Estimation du flux par l’analyse inverse pour
Configuration spatio-temporelle……………………………………………. 101
Figure III.12. Estimation du flux par l’analyse inverse pour pour différentes
itérations. Configuration spatio-temporelle………………………………… 101
Figure III.13. Estimation du flux par l’analyse inverse pour pour différentes
itérations. Configuration spatio-temporelle………………………………… 102
Figure III.14. Estimation du flux par l’analyse inverse pour pour différentes
Itérations. Configuration spatio-temporelle……………………………….. 102
Tableau III.1. Erreur relative sur la température pour les trois configurations ………….… 98
Tableau III.2. Erreur relative sur le flux de chaleur pour les trois configurations ………… 98

1
Introduction générale
’ère des énergies fossiles est proche de sa fin; d’après les spécialistes du domaine
pétrolier, elles vont s’épuiser d’ici une centaine d’année au maximum , et vu que la
demande cruciale de l’énergie sous toutes ses formes a atteint son apogée, les spécialistes
ont recours aux énergies dites renouvelables pour servir les besoins énergétiques; et sans
réciproque, la maitrise de ces nouvelles procédures repose sur une base fondamentale: les échanges
thermiques, d’où la connaissance de leurs différents modes : la conduction, la convection et le
rayonnement, qui s’avère plus qu’une nécessité pour bien dimensionner les systèmes énergétiques.
L’un des éléments essentiels d’un système énergétique est l’échangeur de chaleur, qui est
impliqué presque dans tous les procédés d’échanges thermiques. Une grande part de l’énergie
thermique utilisée dans les procédés industriels transite au moins une fois par un échangeur de
chaleur.
Dans tout dimensionnement d’un échangeur de chaleur, la mesure exacte du flux de chaleur
entre les fluides chaud et froid est indispensable pour évaluer le coefficient global d’échange
thermique qui est un paramètre essentiel pour répartir la performance de l'échangeur.
Au cours de ces dernières années, les études sur les problèmes inverses de la conduction de
la chaleur a offert des méthodes qui ont pu réduire la quantité du travail expérimental pour obtenir
des quantités thermiques exactes telles que les sources de la chaleur, les propriétés thermiques des
matériaux et la température de la paroi ou les distributions de flux de chaleur. Bien que ces
problèmes inverses de la conduction de la chaleur soient largement étudiés, il y a peu d’études sur
les problèmes inverses de la convection/conduction impliquant l’échange de chaleur conjugué,
vraisemblablement dû à la nature complexe de ces systèmes.
Dans cette étude, on propose d’estimer le flux de chaleur sur la paroi externe d'une conduite
par la méthode inverse, impliquant l’échange de chaleur par convection forcée. Le système est
constitué d’un fluide en écoulement dans une conduite, une paroi solide et un flux de chaleur
appliqué sur la paroi externe de la conduite. C’est un problème inverse de transfert thermique par
convection forcée. Il y a plusieurs approches pour résoudre un problème inverse. Parmi ces
méthodes, celle du gradient conjugué qui consiste à transformer l'équation d'énergie (dit problème
direct), en une équation adjointe et une équation de sensibilité (équation de variation) et résoudre
ces trois équations itérativement pour minimiser l'erreur de l'estimation. L’objectif du travail, est
L

2
l’utilisation de la méthode inverse pour estimer le flux de chaleur appliqué à la paroi supérieure en
utilisant la température simulée et les conditions aux limites.
L'outil de base sera un code numérique réalisé en MATLAB simulant la convection forcée entre
deux plaques parallèles, soumise à une densité de flux variable sur sa paroi externe.
Dans cette optique, notre travail est scindé en trois chapitres :
Le premier rassemble des généralités et une synthèse bibliographique sur les principaux
travaux déjà réalisés et qui gravitent autour de la problématique inverse en thermique.
Le second concerne le développement analytique et la résolution numérique du problème
direct de la convection forcée en régime instationnaire. Le schéma implicite des directions alternées
ADI de la méthode des différences finies est utilisé pour résoudre le problème direct ainsi que pour
transformer le système d’équations aux dérivées partielles en un autre tridiagonal qui se résout par
l’algorithme de Thomas. Un code de calcul est développé en MATLAB pour résoudre le système
d’équations avec leurs conditions spatio-temporelles.
Le troisième chapitre est consacré à la résolution du problème inverse en utilisant la
méthode du gradient conjugué afin de reconstituer en espace et en temps la fonction du flux de
chaleur. Pour faire, l’établissement des équations d’état adjoint et de sensibilité permet de trouver la
direction de la descente et le pas respectivement, avant de passer au calcul du nouveau paramètre à
estimer. Des essais numériques ont permis de valider la méthode proposée.

3
Chapitre I
Généralités et synthèse bibliographique

4
I-1- INTRODUCTION
a recherche dans le domaine des échangeurs de chaleur est intensifiée ces dernières années
en raison du souci d’économiser de l'énergie, en impliquant le combat contre le
réchauffement global. Le point focal de la recherche sur les échangeurs de chaleur est le
perfectionnement du phénomène de transfert de chaleur, qui est l'une des questions clé
pour améliorer le fonctionnement de ces appareils et établir des systèmes thermiques plus rentables,
ce qui justifie le choix de notre travail qui porte sur l’analyse d’un problème inverse en conduction-
convection forcée dans un échangeur de chaleur. On propose, ainsi de décrire quantitativement (en
espace et temps) l’évolution des grandeurs caractéristiques du système, en particulier la distribution
de températures, entre l’état d’équilibre initial et l’état d’équilibre final [1].
Une compréhension quantitative des processus de transfert de chaleur apparaissant dans plusieurs
applications industrielles nécessite une connaissance précise des sources internes, des propriétés
thermiques du matériau ou des conditions de surface. Cependant, il existe des situations où les
conditions expérimentales ne permettent pas une mesure directe de ces grandeurs. Face à une telle
situation, les spécialistes ont recours aux problèmes inverses, et leurs résolutions deviennent
incontournables.
Le problème direct de conduction de la chaleur consiste à résoudre l'équation de la chaleur afin de
calculer le champ de température complet dans tout le domaine. Cette résolution s'effectue
connaissant, la géométrie du domaine, les paramètres volumiques ou surfaciques, une condition
limite par contour et les termes sources. Du point de vue de la modélisation, le résultat du problème
direct est comparé à l'expérience dans une procédure de validation. Une étude qualitative ou
quantitative conduit alors à la validation ou non de la solution numérique du modèle.
La résolution est dite inverse lorsque l'une des conditions, nécessaires pour résoudre le problème
direct de l'équation de la chaleur, n'est pas connue. Par exemple, nous trouvons des problèmes
inverses consacrés à l'estimation de propriétés physiques des matériaux, à l'estimation de sources de
chaleur (surfacique ou volumique), à l'estimation de la géométrie du domaine. En ce qui nous
concerne nous avons porté notre attention sur l'estimation du flux de chaleur appliqué à la paroi
supérieure d’un conduit (deux plaques parallèles) en utilisant la température simulée. Par la suite, la
distribution de la température dans cette conduite peut être obtenue.
Cette démarche conduit en général à la résolution de problèmes mal posés au sens de Hadamard.
Une conséquence du caractère mal posé du problème inverse en thermique est l'extrême sensibilité
de la solution aux erreurs de mesure, ce qui conduit la plupart du temps à des solutions non uniques,
d’où la nécessité de développer un code de calcul pour simuler la convection forcée dans une
conduite soumise à une densité de flux variable sur sa paroi externe.
L
5
I-2- GENERALITES SUR LES PROBLEMES THERMIQUES INVERSES
Les problèmes inverses interviennent dans une grande variété de champs d’application tels que les
énergies renouvelables, la géophysique, le contrôle non destructif, l’imagerie médicale,
l’assimilation de données météorologiques ou océanographiques, la restauration de signaux ou
d’images, le recalage de modélisations, etc… [2, 3]
L’avènement, puis les progrès fulgurants réalisés par les méthodes de simulation ont conduit, à
travers le concept de problème inverse, à repenser profondément le concept de mesure, qui repose
de plus en plus sur l’imbrication de trois éléments: l’expérimentation, les techniques de simulation
directe, et les algorithmes d’inversion.
Les problèmes inverses constituent un champ scientifique fortement multidisciplinaire, et font
partie des préoccupations scientifiques d’un nombre important d’équipes de recherche.
Les relations reliant les grandeurs accessibles à la grandeur recherchée n'admettent pas toujours une
formulation mathématique simple et font fréquemment intervenir des équations
Intégrales ou aux dérivées partielles EDP. Dans le problème direct, la résolution des EDP
permettent le plus souvent de calculer des observables en fonction des grandeurs inconnues. Dans le
problème inverse, l'obtention de grandeurs inconnues à partir des observables, conduit à résoudre
les équations de la physique dans le sens inverse de celui usuellement pratiqué et maîtrisé; le
problème inverse est en général, de par sa nature, plus difficile que le problème direct.
C'est en particulier dans le domaine de la thermique, à travers ses diverses composantes et
thématiques, qu'a pu être exploitée la richesse de ces techniques d'inversion. En effet, grâce aux
progrès rapides des méthodes de calcul, des moyens de mesure et de la puissance des ordinateurs, la
métrologie des températures, des flux de chaleur, des propriétés d'interface (coefficients d'échanges,
résistances de contact) ainsi que la caractérisation des grandeurs thermophysiques des milieux ont
considérablement évolué par la mise en œuvre et la maîtrise du problème inverse appliqué aux
systèmes thermiques [4].
I-2-1- Problèmes directs en conduction thermique
Le problème direct de conduction de chaleur consiste à résoudre l’équation de la chaleur afin de
calculer le champ de température complet dans tout le domaine. Cette résolution s’effectue
connaissant la géométrie du domaine, les paramètres volumiques ou surfaciques, une condition
limite par contour et les termes sources. Bien évidemment, du point de vue de la modélisation, le
résultat du problème est comparé à l’expérience dans une procédure de validation [5, 6].
6
I-2-2-Méthode du gradient conjugué
Pour résoudre un problème inverse, on a souvent recours à la méthode du gradient conjugué (CG -
Conjugate gradient) associée à une méthode de résolution numérique telle que la technique des
différences finies [7, 8, 9].
La plupart des méthodes utilisent la technique du gradient conjugué pour évaluer les paramètres. La
forme quadratique minimisée par la technique du gradient conjugué est une somme des carrés de la
différence de la solution théorique ou expérimentale et de l'expression analytique du problème
direct. Cette expression analytique est, dans la plupart des cas, une série illimitée solution du
problème direct de conduction considérée. La difficulté réside dans le fait qu'un programme ne peut
pas calculer une série illimitée. En faisant ainsi, on augmente les erreurs. En effet, il existe une
erreur sur la discrétisation du domaine, une deuxième erreur sur la solution approchée et il y aura
une troisième erreur sur la méthode de minimisation elle-même. Le principe consiste à minimiser
une fonctionnelle par itérations successives en donnant à chaque itération une solution sous la
forme : AX = B
avec A une matrice positive et la solution exacte du système. La méthode du gradient conjugué
consiste à construire une suite (pk) N de n vecteurs A-conjugués. Dès lors, la suite p1, p2,…, pn
forme une base de Rn. La solution exacte peut donc se décomposer comme suit :
La solution exacte peut-être également vue comme étant l'unique minimisant de la
fonctionnelle :
On a donc clairement avec
On définit le résidu du système d'équations comme suit :
Sollicitations : sources Sorties ou observation :
Volumique ou flux température en certains point
Surfacique
Figure I.1. Paramètres volumiques et surfaciques
Figure I.1. Schéma d’un problème direct.
Système thermique

7
représente donc la direction du gradient de la fonctionnelle J en (à un signe près). La nouvelle
direction de descente suit donc celle du résidu et sa A-conjugaison avec , on a alors :
C’est le choix du coefficient
qui assure la A-conjugaison des directions
I-3-METHODES INVERSES EN CONDUCTION DE LA CHALEUR
Le problème direct de conduction de la chaleur consiste à résoudre l'équation de la chaleur afin de
calculer le champ de température complet dans tout le domaine. Cette résolution s'effectue
connaissant, la géométrie du domaine, les paramètres volumiques ou surfaciques, une condition
limite par contour et les termes sources. La résolution est inverse lorsque l'une des conditions,
nécessaires pour résoudre le problème direct de l'équation de la chaleur, n'est pas connue. Par
exemple, nous trouvons des problèmes inverses consacrés à l'estimation de propriétés physiques des
matériaux, à l'estimation de sources de chaleur (surfaciques ou volumiques), ou à l'estimation de la
géométrie du domaine.
En ce qui nous concerne nous avons porté notre attention sur l'estimation de conditions aux limites
inconnues.
Ce problème inverse particulier est appelé le Problème Inverse de Conduction de la Chaleur
(PICC) ; pour sa résolution, l'obtention de mesure est nécessaire pour l'inversion du schéma
classique causes→effets. Cette démarche conduit en général à la résolution de problèmes mal posés
au sens de Hadamard. Une conséquence du caractère mal posé du PICC est l'extrême sensibilité de
la solution aux erreurs de mesure, ce qui conduit la plupart du temps à des solutions non uniques.
Dans les travaux de T. Lu et al.[10], une étude sur le problème inverse de conduction de chaleur a
permis d’estimer la température d’un fluide dans un pipeline, les travaux de Cheng-Hung Huang et
Yao-Long Tsai [11], et ceux de L. Momayez et al.[12] entrent dans le même cadre.
Les problèmes inverses en conduction de la chaleur (PICC) peuvent être classés en quatre grandes
familles :
I-3-1-Problèmes inverses rétrogrades de la conduction de la chaleur
Ils consistent à retrouver le champ de température initial ou le champ de température à un instant
donné dans un domaine [13,14].

8
I-3-2- Problèmes inverses pour l'estimation/identification des conditions aux limites.
Il s'agit soit d'estimer un flux de chaleur appliqué sur une surface en fonction de l'espace et/ou du
temps soit d'identifier un paramètre thermique [15,16].
I-3-3- Problèmes inverses pour l'estimation des paramètres caractéristiques du milieu.
Ce sont des problèmes d'estimation de propriétés thermophysiques [17].
I-3-4-Problèmes inverses de design
Il est question d'estimer le flux de chaleur à imposer sur une surface d'un domaine dans le but
d'avoir la distribution de température désirée sur une autre paroi du domaine.
Nous pouvons globalement distinguer deux directions de recherche dans les problèmes inverses
d'identification en thermique.
I-4- METHODES INVERSES EN CONVECTION
La convection de chaleur dans les écoulements internes a suscité ces dernières décennies un intérêt
considérable qui se traduit par la production d’une bibliographie abondante, en raison de
nombreuses applications qui concernent par exemples les échangeurs de chaleur, les collecteurs
solaires, le refroidissement des composants électroniques, etc... D’autre part, la compréhension des
phénomènes physiques inhérents à l’interaction de la convection libre et forcée constitue en soi un
objectif très important [18, 19].
Selon Benyousef et al [20], La convection forcée dans des géométries complexes trouve son
importance dans de nombreuses applications industrielles et plus particulièrement dans les réacteurs
nucléaires, les échangeurs de chaleur, les capteurs solaires, le refroidissement des turbomachines et
des composants électroniques. Un travail considérable a été effectué ces dernières années sur les
écoulements et les transferts thermiques dans les échangeurs à faisceaux et à calandres. Ces études
sont de natures aussi bien expérimentales que numériques. Elles montrent essentiellement que
l'écoulement est caractérisé par des fortes déformations et de grandes régions de recirculation et
qu’en général, le nombre de Nusselt et le coefficient de frottement augmentent avec le nombre de
Reynolds.
Les problèmes de convection naturelle et forcée sont d’une grande importance pour la simulation de
phénomènes physiques rencontrés en industrie. En différences finies, la simulation des phénomènes
de convection naturelle et forcée a principalement été réalisée par l’utilisation de la formulation
et le modèle . On peut citer comme exemple les travaux de Robichaud [21] et
Benyousef [20].
9
Redjem Saad Lotfi [22] a proposé une étude de simulation numérique des transferts par convection
forcée dans des écoulements turbulents pleinement développés.
Dans cette même perspective, nombreux, sont les travaux effectués par les chercheurs et les
scientifiques concernant la convection sous ses trois formes et peu sont ceux qui ont pris le relais de
la conduction – convection forcée et sa résolution par les méthodes inverses dans cette
synchronisation.
I-5- METHODES INVERSES EN CONDUCTION-CONVECTION
Nombreuses publications et articles concernant les méthodes inverses ont vu le jour ces 20
dernières années, on donne ci-dessous quelques références de travaux réalisés sur la méthode du
graduant conjugué ainsi que sur les problèmes de la convection forcée.
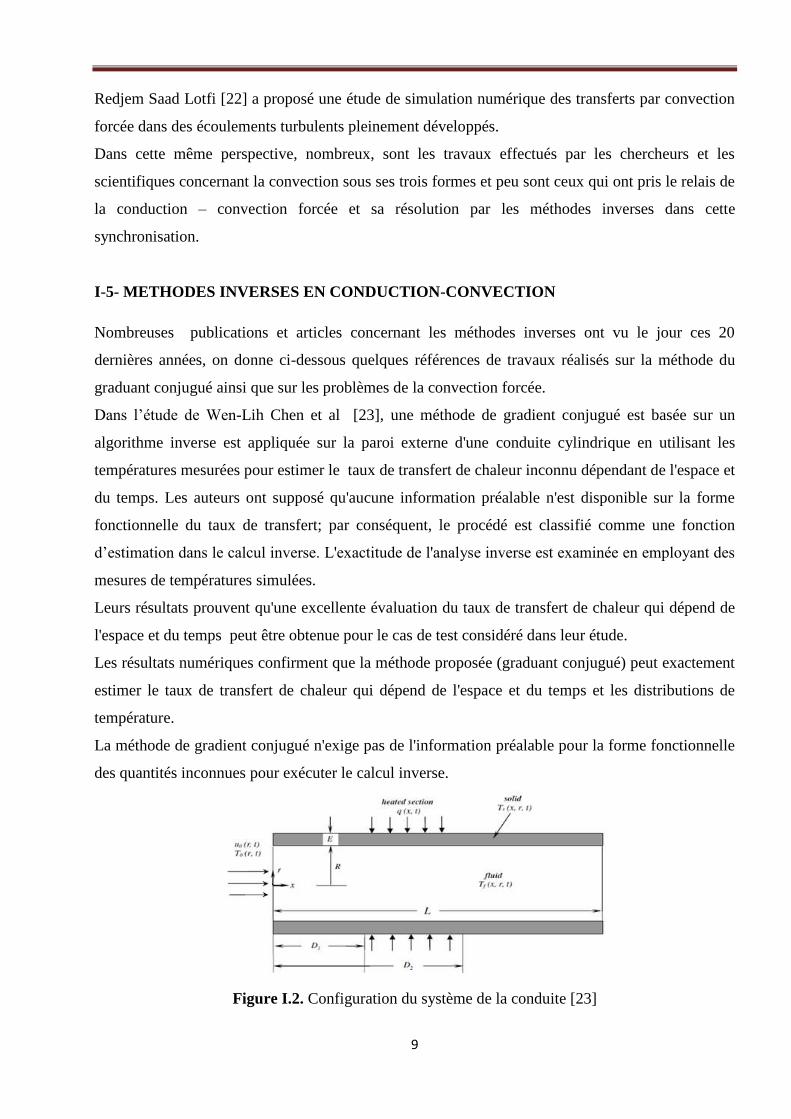
Dans l’étude de Wen-Lih Chen et al [23], une méthode de gradient conjugué est basée sur un
algorithme inverse est appliquée sur la paroi externe d'une conduite cylindrique en utilisant les
températures mesurées pour estimer le taux de transfert de chaleur inconnu dépendant de l'espace et
du temps. Les auteurs ont supposé qu'aucune information préalable n'est disponible sur la forme
fonctionnelle du taux de transfert; par conséquent, le procédé est classifié comme une fonction
d’estimation dans le calcul inverse. L'exactitude de l'analyse inverse est examinée en employant des
mesures de températures simulées.
Leurs résultats prouvent qu'une excellente évaluation du taux de transfert de chaleur qui dépend de
l'espace et du temps peut être obtenue pour le cas de test considéré dans leur étude.
Les résultats numériques confirment que la méthode proposée (graduant conjugué) peut exactement
estimer le taux de transfert de chaleur qui dépend de l'espace et du temps et les distributions de
température.
La méthode de gradient conjugué n'exige pas de l'information préalable pour la forme fonctionnelle
des quantités inconnues pour exécuter le calcul inverse.
Figure I.2. Configuration du système de la conduite [23]

10
David T.W. Lin et al [24] ont proposé un algorithme inverse basé sur la méthode de gradient
conjugué pour estimer les conditions aux limites de ces problèmes, et ils ont réduit l’erreur prévue
en minimisant la fonction objective. Ils ont constaté que l’évaluation du flux thermique appliqué
est fortement liée à la température et bien entendu à l’épaisseur de la paroi, et à la manière de
chauffage. Les résultats prouvent que les conditions aux limites prévues par la méthode inverse
employée sont compatibles à celles spécifiées au début.
Figure I.3. Configuration du système de la conduite [24]
Une méthode de gradient a été utilisée par PUJOS C. et al. [25], et s’appuyant sur la résolution des
équations adjointes a permis la prise en compte des contraintes phénoménologiques. L’algorithme
de la méthode est explicité dans le schéma ci-dessous :
Figure I.4. Algorithme de la méthode de résolution du problème inverse [25]
D’autres organigrammes de résolution d’un problème inverse ont été utilisés, on peut citer celui de
Garnier [26] présenté comme suit (Figure I.5):

11
Figure I.5. Organigramme général de mise en œuvre d'une procédure inverse [26]
A. Korichi et al. [27] ont présenté une étude numérique de la convection forcée laminaire transitoire
dans un canal en présence d’un cylindre à section carrée. Les calculs sont effectués pour le cas de
l'air (Pr=0.71) et pour un rapport d’aspect H/D=0.1. Les champs dynamique et thermique sont
obtenus pour Re=50, 100 et 200. Une analyse des lignes de courants, de température et du nombre
de Nusselt est réalisée afin de prédire la structure d’écoulement et le transfert convectif en régimes
permanent et transitoire. La valeur du nombre de Reynolds critique du passage permanent-
transitoire est également déterminée.
Abdeslam Omara et Said Abboudi [28] ont effectué une simulation numérique de la convection
mixte transitoire et conjuguée dans une conduite cylindrique verticale. La surface externe de la
conduite est soumise à un flux de chaleur constant et uniforme, appliqué sur une section centrale de
longueur égale à dix fois le diamètre hydraulique. Les résultats obtenus montrent que la présence du
renversement de l’écoulement près de la paroi déforme fortement le profil radial de température.
Par ailleurs, ils ont constaté une redistribution du flux de chaleur imposé dans la région de
préchauffage. Cette dernière est d’autant plus proche de l’entrée de la section chauffée que les
valeurs de l’épaisseur de la paroi au diamètre hydraulique et des conductivités thermiques K du
fluide et du solide sont faibles.
Jean-Marie Buchlin [29] a réalisé une étude expérimentale sur le transfert de chaleur en convection
forcée et libre le long de cylindres verticaux minces. Le coefficient convectif local est déterminé à
MODELE DE CALCUL
DES
VARIABLES X(p)
METHODE
D'ESTIMATION
TECHNIQUE
D'OPTIMISATION DE
(p)
VALIDITE DE LA
PROCEDURE

12
partir de la distribution axiale de température de surface mesurée par thermographie infrarouge. Il a
montré que le coefficient de transfert de chaleur dépend fortement du rayon de courbure du cylindre
et de son incidence dans l'écoulement. L'effet de proximité des deux cylindres est mis en évidence
dans le cas de la convection forcée. Le coefficient de transfert de chaleur en convection libre
turbulente peut être aussi important que celui de convection forcée en régime laminaire. Son étude
démontre l'aptitude de la thermographie infrarouge quantitative à résoudre les problèmes d'échange
thermique complexes et à fournir une meilleure compréhension du transfert de chaleur dans les
cylindres minces.
D. Maillet et A. Degiovanni [30] ont établi un modèle analytique permanent bidimensionnel de
transfert de chaleur permettant de calculer la température interne à partir d’un profil surfacique du
coefficient de transfert sur un cylindre. Ils ont prouvé que les méthodes directes de mesure du
coefficient local de transfert de chaleur sur la paroi présentent des limitations intrinsèques. Pour
cela ils ont développé une méthode inverse, basée sur un modèle analytique de conduction de la
chaleur dans un tube cylindrique. Elle permet, à partir des seules mesures de température à
l’intérieur du cylindre, de remonter au profil de coefficient de transfert en surface (Figure I.6).
Figure I.6. Modélisation du problème par D. Maillet et A. Degiovanni [30]
Y. Tamene et al. [31]ont réalisé une étude numérique, par différences finies, sur le transfert de
chaleur dans un mur multicouche (à deux ou trois couches) soumis à une condition de rayonnement
solaire sur le côté extérieur et prenant en compte les échanges de chaleur par convection sur ses
deux faces. Les résultats numériques ont montré qu’il est possible de choisir et d’optimiser les
matériaux qui composent le mur multicouche. En outre ils ont analysé l’influence, sur le transfert de
chaleur, de quelques paramètres clés du système comme le choix des matériaux, l’optimisation de
leur épaisseur et également la nature variable du flux solaire (Figure I.7).

13
Figure I.7. Présentation du système [31]
Young et al. [32]ont effectué une investigation numérique de la convection forcée pour un fluide
compressible dans un canal contenant une rangée d’obstacles chauffés et attachés à sa paroi
inférieure. Ils ont étudié les effets du nombre de Reynolds, de la hauteur, de la largeur et de
l’espacement des obstacles ainsi que de leur conductivité thermique. Les résultats montrent que tous
ces paramètres ont des influences remarquables sur la variation du nombre de Nusselt moyen, des
composantes de la vitesse et de la distribution de la température au sein du fluide (Figure I.8).
Figure I.8. Canal contenant un seul obstacle Chauffé [32]
En 2001, Huang [33] a présenté un problème inverse 3D sur l’estimation d’une source de chaleur
volumique pour un matériau composite. La méthode présentée est basée sur la mise en œuvre d’une
conjointe de l’algorithme du gradient conjugué et d’un code commercial pour la méthode des
volumes finis. La géométrie étudiée est une géométrie irrégulière 3D dont la troisième dimension
(z) est petite devant les deux autres (x et y).
Ces deux plaques ont des propriétés thermophysiques différentes. Dans l’une d’elle se trouve une
source surfacique dont l’intensité n’est fonction que de x, y et du temps. Une condition aux limites
de type Fourier est imposée sur la frontière du domaine. Pour la résolution du problème inverse, les
informations supplémentaires sont des informations surfaciques.
Une autre approche est proposée par Abou Khachfe [34] utilisant la méthode de l'état adjoint et une
minimisation par gradient conjugué. Cette méthode devrait permettre d'estimer le terme source

14
volumique. L’algorithme du gradient conjugué en alternance est utilisé pour déterminer
simultanément l’intensité et la position des sources de chaleur.
Un ensemble d’expériences a été effectué par Bhowmik et Tou [35] dans le but d’étudier le
transfert de chaleur en régime transitoire monophasé en convection forcée. Le dispositif
expérimental comporte quatre sources de chaleur montées dans un canal vertical rectangulaire.
L’eau est utilisée comme fluide de refroidissement et l’écoulement comprend une large gamme du
nombre de Reynolds en régime laminaire, variant de 800 à 2625. Les résultats expérimentaux
indiquent que le transfert de chaleur est fortement lié au nombre de sources et au nombre de
Reynolds. Les résultats montrent aussi que plus la hauteur du composant est plus grande, plus le
transfert de chaleur est plus important.
Fu et Tong [36] ont réalisé une simulation numérique de la convection forcée en étudiant
l’influence d’un cylindre oscillant sur le transfert de chaleur au niveau d’un nombre de sources de
chaleur soumises à un écoulement dans un canal horizontal. La méthode de Lagrange-Euler de
description cinématique a été adoptée pour décrire les champs d’écoulement et de température, et la
méthode des éléments finis a été appliquée pour résoudre les équations gouvernantes. Les résultats
montrent que le transfert de chaleur augmente avec l’augmentation du nombre de Reynolds et
s’améliore remarquablement pour des oscillations importantes du cylindre.
Plusieurs travaux concernant la méthode du graduant conjugué ont été réalisés, on note ceux de
Huang et Ozisik [37] Neto et Ozisik [38, 39, 40] pour l’estimation de sources ponctuelles de
chaleur. Ces travaux sont basés sur la mise en œuvre conjointe de la méthode des différences finies
et de l’algorithme du gradient conjugué. Un critère d’arrêt, construit sur le principe de régularisation
itérative d’Alifanov [41, 42] permet de traiter le caractère mal posé du problème sans introduire de
termes de régularisation supplémentaires. Des exemples numériques sont présentés pour des
systèmes dont les propriétés thermophysiques sont constantes.
Silva Neto et Ozisik [40] proposent l’algorithme du gradient conjugué pour estimer de manière
simultanée la position et l’intensité d’une source ponctuelle pour des transferts de chaleur 1D. La
géométrie étudiée est un mur dont les parois sont isolées ; la température sur les deux parois est
donnée pour l’inversion.
I-6- METHODES D’OPTIMISATION
L’optimisation (c’est-à-dire les techniques permettant de chercher les minima ou les maxima de
fonctions ou de fonctionnelles) intervient dans pratiquement tous les processus de modélisation
actuels. Qu’il s’agisse de problèmes directs (ajustement de données, contrôle optimal, résolution de
systèmes linéaires par moindres carrés, etc. . . .) ou inverses (identification de paramètres, contrôle

15
de frontières libres etc..), il est rare qu’un problème d’optimisation plus ou moins complexe
n’intervienne pas à un stade donné de la modélisation et/ou de la simulation. De ce que suit, on
donne les définitions et principes de base de la théorie de l’optimisation.
Tous les problèmes d’optimisation peuvent s’écrire sous la forme générale suivante [43, 44]:
{
Où
est une fonction de plusieurs variables à valeurs réelles. Cette fonction
(que l’on minimise) est appelée indifféremment fonction coût, objectif ou critère [43].
est une fonction à plusieurs variables ayant des valeurs dans . Elle a p
composantes, et on peut écrire :
( )
Chaque fonction étant définie sur et a des valeurs dans . La fonction représente les
contraintes en inégalité. La notation signifie qu’on considère les inégalités composante
par composante : .
est une fonction de plusieurs variables ayant des valeurs dans . Elle a q
composantes, et on peut écrire :
( ),
Chaque fonction étant définie sur et ayant des valeurs dans . La fonction représente les
contraintes en égalité.
On présentera dans ce qui suit quelques méthodes (algorithmes) de minimisation de la fonction
objectif.
I-6-1- Méthode de la descente
i) Le gradient
Soit une fonction différentiable, la fonction notée est appelée le
gradient de ; il est défini par :

16
(
)
ii) La pente
Soit une fonction différentiable. Soient .
La quantité :
‖ ‖
Représente la pente de la fonction en dans la direction .
iii) Le point critique
Soit une fonction différentiable. Tout vecteur tel que , est appelé
point critique ou point stationnaire de .
iv) La courbure
Soit une fonction deux fois différentiable. Soient . La quantité
‖ ‖
représente la courbure de la fonction en dans la direction .
v) Direction de descente [45, 46, 47]
Soit une fonction différentiable. Soient . La direction est dite direction de
descente en si
Les algorithmes de ce type sont appelés méthodes du gradient en raison de la relation de la direction
et le gradient .
La direction du gradient est celle dans laquelle la fonction a la plus forte pente. La direction
opposée au gradient est donc celle dans laquelle la fonction a la plus forte descente.
vi) Descente
Soit une fonction différentiable. Soient tel que et . Si est
une direction de descente en alors il existe tel que :

17
[ ]
En utilisant ce résultat, on construit un algorithme de minimisation, nommé algorithme de descente.
Il consiste à suivre une direction de descente de façon itérative jusqu’à l’obtention d’un bon
minimiseur. On utilise souvent plus d’un critère d’arrêt. Habituellement, on trouvera :
- Un critère sur le déplacement, si ‖ ‖ est très petit, c’est qu’on ne progresse plus
beaucoup.
- Un critère sur la progression de l’objectif, si ‖ ‖ est très petit, on peut être
presque arrivé à un minimum. On peut aussi mesurer la norme du gradient.
- Un critère sur le temps de calcul ou le nombre d’itérations.
Algorithme de la descente
1
2
3
4
5
6
7
Données : une fonction différentiable et un point initial
tant que critère d’arrêt non satisfait faire
trouver une direction de descente telle que ;
trouver un pas tel que ;
;
;
Fin
I-6-2- Méthode du gradient [46, 47, 48]
L’idée de base consiste à utiliser le gradient comme direction de descente, soit :
Les points sont ainsi successivement générés par la méthode du gradient de la manière suivante :
( )
Remarquons que la méthode s’arrête lorsque car dans ce cas .
I-6-3-Méthode du gradient conjugué [46, 47, 48, 49, 50, 51, 52]
La méthode de gradient conjugué est la méthode itérative principale pour la résolution de grands
systèmes creux d'équations linéaires. La méthode peut être utilisée aussi pour la minimisation d'une
fonction dont le gradient est connu. Nous présentons d'abord la théorie de la méthode de descente,
puis les directions conjugués et finalement les algorithmes.

18
La méthode du gradient conjugué est une méthode de descente à pas optimal permettant de
minimiser une fonction quadratique de dans en au plus n itérations.
La méthode du gradient conjugué fait partie des méthodes de descente, qui ont comme principe
commun la recherche de suivant le procédé itératif :
Avec : la direction de la descente
: le pas de descente
Et une fois les paramètres de la méthode de la descente sont définis (fixer et ), on peut calculer
facilement un pas de descente optimal.
Quant à la direction de descente, plusieurs choix sont possibles, ce qui nous permet de distinguer :
la méthode de relaxation : la base canonique de ;
la méthode du gradient : ;
la méthode du gradient conjugué : , avec les directions de descente conjuguées par
rapport à la matrice A, c'est-à-dire ( .
L’efficacité de la méthode du gradient conjugué réside dans ses propriétés remarquables, notons que
pour l’itération i on a :
les directions de descente sont construites de telle manière que les gradients
soient tous orthogonaux entre eux, i.e. (ce n’est pas dans le
cas da la méthode du gradient, où seulement deux gradients successifs sont orthogonaux)
d’un point de vue pratique, les directions de descente sont faciles à calculer, à partir des
gradients , et la méthode nécessite le stockage de seulement trois vecteurs
supplémentaires.
Une formulation optimisée de l’algorithme est la suivante :
Le gradient conjugué pour résoudre le système linéaire
Soient la valeur initiale et la précision (fixée)
Pour

19
( )
( ) STOP
I-6-4- La fonction de sensibilité
Il s’agit de la méthode la plus naturelle pour calculer le gradient de J. Elle consiste à dériver
l’équation d’état explicitement par rapport au paramètre m, puis à utiliser la règle de dérivation
d’une fonction composée. Nous précisons que cette méthode donne un résultat exact. On a :
Une première idée est de calculer le Jacobien de défini de façon implicite par :
( )
Le principal désavantage de cette méthode réside dans le fait que le calcul de demande la
résolution d’une équation d’état (linéarisée) pour chaque valeur de .
En contrepartie, cette méthode fournit plus que le gradient, puisqu’elle calcule le jacobien de .
Une fois disponible, on l’exploite pour le calcul de ses valeurs singulières.
I-6-5- La méthode de l’état adjoint
Nous avons déjà noté que la méthode des fonctions de sensibilité fournissait plus que le gradient de
J. Si nous n’avons besoin que du gradient, nous pouvons réarranger le calcul menant à (A) pour
éviter le calcul du Jacobien complet.
I-7-Conclusion
A la lumière des travaux exposés, on propose dans notre étude d’estimer la température d’entrée ou
le flux de chaleur à travers la paroi externe d’un conduit (deux plaques parallèles) par la méthode
inverse, impliquant l’échange de chaleur par convection forcée. Le système est constitué d’un fluide
en écoulement dans une conduite. C’est un problème inverse de transfert thermique par convection
forcée. Il y a plusieurs approches pour résoudre un problème inverse et on va choisir celle du
graduant conjugué qui consiste à transformer l’équation d’énergie en une équation adjointe et une
équation de sensibilité et résoudre les trois équations itérativement pour minimiser l’erreur
d’estimation.
L’objectif du travail est l’utilisation de la méthode inverse pour estimer le flux de chaleur appliqué à
la paroi de la conduite en utilisant la température simulée, par la suite, la distribution de la
température peut être déterminée également.

20
L’outil de base sera un code numérique simulant la convection forcée entre deux plaques parallèles,
soumises à une densité de flux variable sur sa paroi externe.

21
Chapitre II
Développement analytique et résolution numérique
du problème direct de la convection forcée
ans ce deuxième chapitre nous nous intéressons aux développements mathématique et
numérique du problème direct de la convection forcée. Nous exposons les deux cas,
l’écoulement dans un canal à plaques parallèles et l’écoulement dans une conduite
cylindrique. Le système est constitué d’un fluide en écoulement dans une conduite à paroi
solide soumise à un flux de chaleur variable.
D

22
II-1- DEVELOPPEMENT MATHEMATIQUE
II-1-1- Cas d’un écoulement dans un canal à plaques parallèles
On considère le transfert de chaleur par convection forcée en régime variable laminaire dans
une conduite à parois parallèles avec une largeur b et d’une épaisseur δ. L’écoulement entrant a une
distribution de vitesse développée et une température constante à l’entrée T0.
Initialement, les deux plaques parallèles sont isolées thermiquement. Soudainement, à temps t=0, la
condition d’adiabacité de la paroi supérieure est modifiée par un flux de chaleur variable en
fonction de la position « x » et du temps « t ».
Nous supposons dans la suite que le fluide a des propriétés constantes et une pression négligeable.
La figure II-1 décrit la géométrie et les coordonnées du problème
Figure II.1. Configuration du problème posé
II-1-1-1- Hypothèses simplificatrices
Ecoulement instationnaire
Ecoulement unidirectionnel suivant la coordonnée « x »
Ecoulement développé suivant x (
)
Ecoulement unidimensionnel : Ux dépend de y et Uy = 0
Les deux plaques sont immobiles
x
y
q(x,t)
U (y)
b
δ
Paroi adiabatique

23
le rayonnement n'est pas pris en considération (les propriétés émissives des parois étant
négligées).
Nous admettons que le problème est bidimensionnel, le régime est variable et l’écoulement
est laminaire.
II-1-1-2-Equations gouvernantes
Les équations de conservation de la masse, de quantité de mouvement et de l’énergie
s’écrivent en forme vectorielle sous la forme :
- Equation de continuité :
(1)
- Equation de mouvement :
(
) (2)
-Equation de la chaleur:
(3)
Avec :
Masse volumique du fluide ;
: viscosité dynamique
Conductivité thermique;
Cp : Capacité calorifique massique du fluide à pression constante ;
P : pression ;
: Vitesse du fluide ;
: Accélération de la pesanteur.
Les équations deviennent en formulation indicielle :
-Equation de continuité :
(4)
-Equation de mouvement :
(
)
(
)
(5)

24
-Equation de la chaleur :
( )
( )
(
) (6)
Avec :
P : pression du fluide.
: tenseur des contraintes visqueuses dont les éléments dépendent du taux de déformation du fluide
soumis au champ de vitesse.
Le problème étant bidimensionnel et variable, donc les équations s'écrivent respectivement :
(7)
(
) (8)
(
)
(9)
(
)
(10)
En tenant compte des hypothèses simplificatrices suscitées et de l’objectif tracé, on ne s’intéresse
que de l’équation de la chaleur, il en reste :
(
)
(11)
On définit la diffusivité thermique α =
, l’équation devient alors :
(
)
(12)
Et du fait que, la diffusion thermique suivant « y » est très supérieure à celle suivant « x », on peut
négliger le terme
devant
, Il en reste de l’équation de la chaleur :

25
(13)
Celle-ci se scinde en deux parties, la partie fluide et la partie solide :
- Partie fluide (l’écoulement)
L’équation prend la forme suivante :
(14)
Avec :
- Partie solide (les parois solides)
L’équation s’écrit sous la forme :
(15)
Le système d’équations est alors sous la forme :
{
(16)
Avec : { é
II-1-1-3-Formulation des conditions initiale et aux limites
Condition initiale :
à t = 0 on a T(x,y,t = 0) = T0
Conditions aux limites :
à x = 0, 0< y < b: Tf (x,y,t) = T0 ;
à y = -δ, :
;
à y= 0, :
;
à y= b, :
;
à y= b+ δ, :
.

26
II-1-1-4- Adimensionnement des équations
L'adimensionnement des équations a pour avantage de simplifier les équations et de généraliser les
résultats.
Posons les quantités adimensionnelles suivantes :
Avec :
b : largeur entre les deux plaques, prise comme référence.
: Nombre de Peclet
[ ] : vitesse adimensionnée
: conductivité thermique de la paroi solide
: conductivité thermique du fluide
: épaisseur adimensionnelle
: diffusivité thermique de la paroi solide
:diffusivité thermique du fluide
: vitesse moyenne de l’écoulement
: flux thermique de référence
A : diffusivité thermique adimensionnée
K : conductivité thermique adimensionnelle
Après remplacement, le système d’équations différentielles prend ainsi la forme suivante :
Partie fluide :
(17)
Partie solide :
(18)
On pose

27
On aura ainsi la forme suivante :
(19)
I-1-1-5-Adimensionnement des conditions initiale et aux limites
La condition initiale devient dans la forme adimensionnelle:
à ,
Les conditions aux limites s’écrivent dans la forme adimensionnelle :
à X= 0 ,
à ,
à Y = 0 ,
à Y = 1 ,
à Y=1+ ,
Ainsi, les équations différentielles et les conditions aux limites adimensionnelles se résument
comme suit :
{
II-1-2- Cas d’un écoulement dans une conduite cylindrique
On considère le problème de transfert de chaleur schématisé dans la Figure II.2, décrivant la
géométrie d'un écoulement laminaire en régime variable dans une conduite cylindrique de longueur
L, de rayon R et d'épaisseur E. La température initiale du système (comprenant le fluide et les
parois solides) est T0. Supposons que le fluide est soudainement soumis à un processus de
chauffage en appliquant un flux thermique variable en espace et en temps sur la région de la paroi x,
(D1< x < D2), tandis que le reste de la paroi externe de la conduite reste dans des conditions
adiabatiques. La chaleur est alors conduite de la paroi extérieure vers la paroi intérieure de la

28
r
conduite où la chaleur est transférée au fluide froid par transfert de chaleur conjugué. Elle est par la
suite portée en aval par la convection forcée.
II-1-2-1- Equations gouvernantes
La formulation mathématique de ce problème de transfert de chaleur, couvrant les domaines
solides et fluides, peut être exprimée comme suit :
Flux imposé q(x, t)
Paroi solide Ts(x, r, t)
u0(x, t)
R
x fluide Tf (x, r, t)
T0(x, t)L
D1
D2 paroi adiabatique
Figure II.2. Configuration du problème de géométrie cylindrique
Partie fluide
(
)
[ (
)
]
Partie solide
(
)
E E

29
Avec :
: diffusivité thermique du solide ;
: diffusivité thermique du fluide ;
: température du fluide ;
: température du solide.
Avec les conditions initiale et aux limites suivantes :
à t=0 : ;
à x=0 : ;
à x = L et 0 < r < R+E
;
à r = 0 et 0 < x < L
= 0;
à r = R et 0 < x < L ;
à r = R et 0 < x < L Ks
= Kf
;
à r = R+E et Ks
= q(x, t) ;
à r = R+E et 0 < x < et < x < L
=0.
Avec q(x, t) le flux thermique appliqué à la surface comme indiqué par la figure II.2 .
K est la conductivité thermique.
II-1-2-1- Adimensionnement des équations gouvernantes
Pour l’adimensionnement du système d’équations, on considère les grandeurs suivantes :
Ce qui donne :
Pour le fluide
(
)

30
Avec :
Nombre de Reynolds
Nombre de Prandtl
Pour le solide
[
(
)
]
Avec :
Les conditions initiale et aux limites adimensionnelles sont définies comme suit :
à
à X=0 ; ;
à X=1 et
;
à et 0 < X < 1
;
à et 0 < X < 1 ;
à et 0 < X < 1 ;
;
à et
;
à et
II-2- DEVELOPPEMENT NUMERIQUE
II-2-1- Principe du calcul numérique par différences finies
A part dans quelques cas très particuliers, il est impossible de calculer explicitement des
solutions des différents problèmes de la thermique. Il est donc nécessaire d’avoir recours au calcul
numérique sur ordinateur pour estimer qualitativement et quantitativement ces solutions. Le
principe de toutes les méthodes de résolution numérique des équations aux dérivées partielles est
d’obtenir des valeurs numériques discrètes (c’est-à-dire en mode fini) qui approchent (en un sens
convenable à préciser) la solution exacte. Dans ce procédé il faut bien être conscient du point
fondamental suivant : on discrétise le problème en représentant des fonctions par un nombre fini de
valeurs, c’est-à-dire que l’on passe du continu au discret [1, 53, 54]

31
Pour discrétiser le continuum spatio-temporel, on introduit deux pas d’espace Δx> 0, Δy > 0 et un
pas de temps Δt > 0 qui seront les plus petites échelles représentées par la méthode numérique. On
définit un maillage ou des coordonnées discrètes de l’espace et du temps (tn, xi, yj) = (nΔt, iΔx,
jΔy).On note la valeur d’une solution discrète approchée au point (tn, xi, yj) et T(t, x, y) la
solution exacte (inconnue). Le principe de la méthode des différences finies est de remplacer les
dérivées par des différences finies en utilisant des formules de Taylor dans lesquelles on néglige les
restes. Par exemple, on approche la dérivée seconde en espaces par :
,
En plus, on a le choix dans la formule de différences finies entre plusieurs schémas :
- La différence finie centrée
( )
Conduit au schéma complètement symétrique par rapport à n, i et j, appelé schéma centré ou
schéma de Richardson
- La différence finie décentrée amont (ou à gauche)
( )
Appelé aussi schéma d’Euler rétrograde (on remonte dans le temps)
- La différence finie décentrée aval (ou à droite)
( )
Appelée aussi schéma d’Euler progressif (on avance dans le temps)
La différence principale entre ces deux dernier schémas est que le schéma décentré amont est
implicite car il faut résoudre un système d’équations linéaires pour calculer les valeurs( ) en
fonction des valeurs précédentes ( ) , tandis que le schéma décentré aval est explicite puisqu’il
donne immédiatement les valeurs ( ) en fonction des (
)
- Méthode implicite des directions alternées
Pour chaque pas de temps la méthode A.D.I ( Alterning Direction Implicite) donne lieu à un
système matriciel tridiagonal à résoudre, l’un résultant de la discrétisation implicite suivant X et

32
l’autre de la discrétisation suivant Y. cette méthode divise le pas de temps en deux parties égales,
dans le premier demi pas de temps le système est résolu implicitement en X, mais explicitement en
Y. Dans le deuxième demi-pas de temps, la procédure est inversée. Notons que cette méthode est
inconditionnellement stable. Pour chaque étape de temps, la résolution est obtenue en balayant le
domaine de calcul dans la direction de X puis dans celle des Y. [55, 56, 57]
Cette méthode se base sur un schéma à pas fractionnaire, aux directions alternées, implicite et
explicite. En effet, il s’agit de considérer un demi pas de temps intermédiaire entre et , à
savoir
[58, 59]
La méthode implicite des directions alternées (A.D.I) est séparée en deux demi-étapes ; dans
chacune un système tridiagonal est à résoudre (l’algorithme de Thomas pouvant être utilisé). Dans
la première demi-étape, la discrétisation est implicite en une direction et explicite dans l’autre [60].
Par exemple, dans l’équation de la convection ci-dessus cela donne :
Suivi de :
Ci- dessus, le premier demi pas, est implicite dans la direction horizontale et explicite dans la
direction verticale, par contre le deuxième demi pas et explicite dans la direction horizontale et
implicite dans la direction verticale [61, 62].
- Schéma explicite: à chaque instant, la température en tout point est calculable en fonction de la
répartition de température à l’instant précédent.
- Schéma implicite: dans ce cas, la température à l’instant t+Δt n’est plus explicitement calculable
en fonction des températures à l’instant t.
La discrétisation des équations adimensionnelles, consiste à appliquer la méthode des
différences finies, en développant chaque terme selon la série de Taylor pour chaque nœud du
maillage adopté (Figure II.3).
En réalité, l’application des différences va nous permettre de substituer le système d’équations
différentielles aux dérivées partielles par un autre dont ces équations sont algébriques, ce qui rend
sa résolution mathématique plus simple, par une des méthodes numériques connue.

33
( i-1, j+1) (i, j+1) (i+1, j+1)
( i-1, j) (i, j) (i+1, j)
(i-1, j-1) (i, j-1) (i+1, j-1)
1…………….........i-1, i, i+1………………..n
Figure II.3. Eléments de maillage du domaine de calcul en (i, j).
II-2-2- Application au cas d’une conduite à plaques parallèles
Dans le cas d’une conduite à plaques parallèles, les équations différentielles, les conditions
initiales et aux limites sont définies par :
à ;
à X=0 : ;
à ;
= 0;
à
;
à
;
1
……
……
……
……
...j
-1,
j
, j+
1…
……
……
…..
……
m

34
à
= Q(X,
Le développement en série de Taylor des termes du système donne :
Premier pas de temps : de
, implicite suivant la direction X et explicite suivant la
direction Y
Le système prend ainsi la forme suivante :
Le système s’écrit alors :
Partie fluide
(
)
[
]
On pose

35
On obtient ainsi :
L’équation peut donc s’écrire sous la forme :
Partie solide
Ce qui donne :
[
]
On pose :
Avec :
En réarrangeant les termes on trouve :
Deuxième pas de temps :
De
, explicite suivant la direction X et implicite suivant la direction Y. C’est un
schéma aux différences centrées, au temps (
) pour les dérivées en X et au temps (n+1) pour les
dérivées en Y. La discrétisation des dérivées partielles est donnée par :

36
,
Le système d’équations prend ainsi la forme :
-Partie fluide
[
]
[
]
Avec :
Ce qui donne :
Qui peut s’écrire sous la forme:
Discrétisation des conditions aux limites
|
|
|
37
|
|
|
Ainsi, le système avec les conditions aux limites sous sa forme discrétisée s’écrit :
Suivi de :
Et
ligne ‘j= m2 ’ligne ‘j= m’
Avec
[
]
[
]
Ligne ‘j= m1 ’ligne j= 1
i
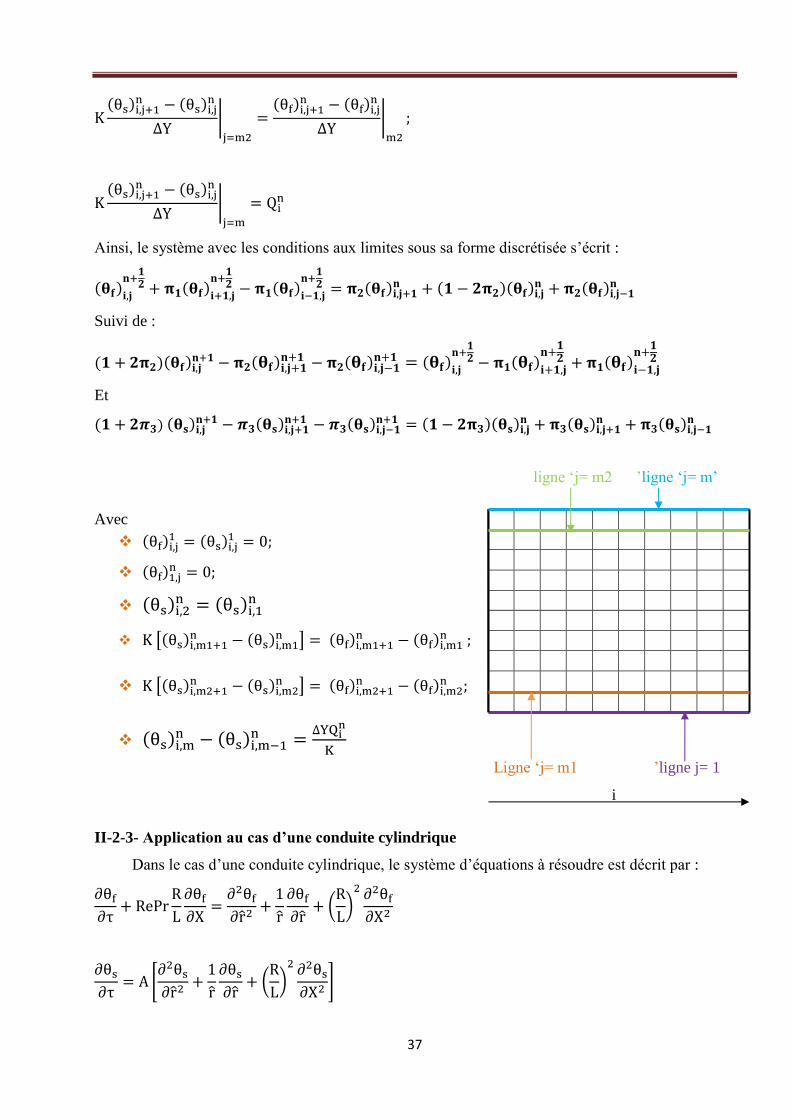
II-2-3- Application au cas d’une conduite cylindrique
Dans le cas d’une conduite cylindrique, le système d’équations à résoudre est décrit par :
(
)
[
(
)
]

38
à
à X=0 ; ;
à X=1 et
;
à et 0 < X < 1
;
à et 0 < X < 1 ;
à et 0 < X < 1 ;
;
à et
;
à et
De la même manière, on utilise le même schéma de discrétisation présenté ci-dessus (ADI) :
Premier pas de temps :
De
, implicite suivant la direction X et explicite suivant la direction du rayon
Partie fluide
|
|
|
|
Ce qui donne :
[
]
(
)
En réarrangeant tous ces termes on trouve :
Avec :

39
[
(
)
]
[
(
)
]
[(
)
]
Partie solide
|
|
|
[
(
)
]
[
]
[(
)
]
On trouve
Avec :
[
(
)
] [
(
)
] [
(
)
]
Deuxième pas de temps : Schéma explicite en et implicite en X. C'est un schéma aux différences
centrées, au temps (n +1/2) pour les dérivées en et au temps (n+1) pour les dérivées en X. La
discrétisation des dérivées partielles est donnée par:
Partie fluide
|
|

40
|
|
Ce qui donne :
(
)
Qui peut s’écrire sous la forme :
Avec :
(
)
(
)
(
)
[
]
[
]
[
]
Partie solide
[
(
)
]
|
|
|
Ce qui donne :
[
]
[(
)
]

41
Et sous la forme finale :
Avec :
(
)
(
)
[
]
[
]
[
]
Le système d’équations s’écrit alors :
Suivi de pour la partie fluide
Et
Suivi de pour la partie solide
Discrétisation des conditions aux limites
à : ; |
|
à : ; |
|
à : et ;
|
|
à : et ; |
|
à : et ; |
|
à : et ;
|
|
à : et
;
|

42
à : et
{
|
|
Avec :
mr : la valeur maximale ou bien finale du compteur des « j » suivant le rayon
mr/2 : le milieu du conduit qui correspond à r = 0
mr1 : interface solide fluide
mx : la valeur maximale du compteur des « i » suivant la longueur
mx1 : la valeur du compteur des « i » à D1
mx2 : la valeur du compteur à D2
Ainsi, le système d’équations aux dérivées partielles avec les conditions aux limites géométriques
de la deuxième configuration s’écrit :
Suivi de pour la partie fluide
et
Suivi de pour la partie solide
Suivi des conditions initiale et aux limites suivantes :
à : ; |
|
à : ; |
|
à : et ;
|
|
à : et ; |
|
à : et ; |
|
à : et ;
|
|

43
à : et
;
|
à : et
on a :
{
|
|
II-3- RESULTATS ET DISCUSSIONS
Pour chaque pas de temps la méthode de différences finies donne lieu à un système matriciel
tridiagonal, que nous résolvons par l'algorithme de Thomas TDMA (Tri-Diagonal Matrix
Algorithm).
Les calculs ont été effectués uniquement sur la partie fluide dans une conduite à plaques parallèles,
avec trois configurations différentes du flux imposé. La première est une fonction triangulaire du
temps, la seconde est sinusoïdale et la troisième est fonction de la position « x » et du temps.
Les figures ci-dessous représentent l’évolution du flux de chaleur en fonction du temps pour une
position x donnée.
Première configuration : Evolution triangulaire du flux imposé en fonction du temps
Q( ) = 20
Q(
Deuxième configuration : Evolution sinusoïdale du flux imposé en fonction du temps
Q( )=20 sin( )
Troisième configuration : Evolution spatio-temporelle du flux imposé
Q )=20Xsin( )
Les résultats issus de la simulation numérique ont été comparés à la solution exacte, et montrent un
excellent accord pour =0 pour les trois configurations étudiées (Figures II-4, II-6 et II-8).
Si on définit l’erreur relative comme étant le rapport suivant :

44
Avec : : flux simulé
: flux exact
alors les faibles valeurs de l’erreur représentée dans les figures II.5, II.7 et II.9 montrent également
une bonne adéquation entre les flux simulé et exact.
La figure II-10 décrit l’évolution de la température en fonction de la position Y pour différents
instants du régime variable. On remarque que la température reste presque constante à des positions
proches de la paroi inférieure de la conduite (qui correspond à la condition de flux nul) , puis les
variations deviennent importantes et rapides au fur et à mesure qu’on se rapproche de la paroi
supérieure (qui correspond à la condition de flux imposé).
Figure II.4. Variation du flux thermique en fonction de temps
Configuration triangulaire
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
t
Q1
Flux calculé
Flux exact

45
Figure II.5. Variation de l’erreur relative en fonction du temps
Configuration triangulaire
Figure II.6. Variation du flux thermique en fonction de temps (flux exacte et calculé)
Configuration sinusoïdale
Figure II.7. Variation de l’erreur relative en fonction du temps
Configuration sinusoïdale
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2x 10
-15
t
Err
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
t
Q1
Flux calculé
Flux exact
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5x 10
-15
t
Err

46
Figure II.8. Variation du flux thermique en fonction du temps
Configuration spatio-temporelle
Figure II.9. Variation de l’erreur relative en fonction du temps
Configuration spatio-temporelle
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
14
16
18
20
t
Q1
Flux exact
Flux calculé
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.03
-0.02
-0.01
0
t
Err

47
Figure II.10. Distribution de température en fonction de la coordonnée verticale.
La figure II.11 représente la distribution en 2D du flux de chaleur à l’intérieur du domaine étudié,
tandis que la figure II.12 montre que le flux thermique reste presque constant à des niveaux proches
de la paroi inférieure, puis ses variations augmentent en s’approchant de la paroi supérieure.
Figure II.11. Distribution du flux thermique en fonction des coordonnées X et Y
Configuration spatio-temporelle
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
y
Tt= 0.5
t= 0.75
t= 0.975
05
1015
2025
3035
4045
0
10
20
30
40
50
0
5
10
15
20
X
Y
Flu
x "
Q"
0
2
4
6
8
10
12
14
16
18
20

48
Figure II.12. Evolution du flux thermique en fonction du temps à différentes positions verticale Y
Configuration spatio-temporelle
II-4- CONCLUSION
Dans ce deuxième chapitre, nous avons présenté les outils nécessaires pour la formulation et
la résolution numérique du problème direct de la convection forcée, la méthode ADI utilisée a
permis de résoudre les équation aux dérivées partielles, en développant un code de calcul sous
l’environnement MATLAB. Les résultats obtenus montrent un bon accord entre les flux thermiques
calculé et exact.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
14
16
temps
Q1
Y = 0.975
Y = 0.9
Y = 0.6
Y = 0.3

49
II-5- PARTIE DU PROGRAMME INFORMATIQUE DU PROBLEME DIRECT
%programme de résolution du problème direct de la convection forcée % Résolution de la partie solide % déclaration de tous les paramètres % introduction des conditions aux limites géométriques et celles du temps %résolution du système tridiagonal avec l'algorithme de Thomas % Auteur:------IMAKHLAF Anis------ clc; clear all;
%-------------------------------------------------% %Déclaration de toutes les constantes qui figurent% % dans l'équation solide % %---------------------------------- ---------------% % REMPLACEMENT DE THETA PAR 'T' % LE TEMPS PAS LE PETIT SYMBOLE 't' % LAMBDA: épaisseur adimensionnelle PAR 'H' % ALPHA: diffusivité thermique PAR 'P' Ks=17; Kf=0.6; Pf=1.5e-7;Ps=4.4e-6;%diffusivité thermique it=41 ; m=41; n=41; K=Ks/Kf; %conductivité thermique adimensionnelle A=Ps/Pf;%diffusivité adimensionnelle z=1:it; dt=1/(it-1); dy=1/(m-1);% le pas de y dx=1/(n-1); %dt=(dy)^2; t(z)=(z-1)* dt; pis2=dt/(2*(dy^2));% BETA
%************ Calcul température par méthode différences finies*********% for i=1:n; x(i)=(i-1)*dx; %#ok<SAGROW> end
for j=1:m; y(j)=(j-1)*dy; %#ok<SAGROW> U(j)=(3/2)*[1-((2*y(j)-1)^2)]; %#ok<SAGROW,NBRAK> %#ok<MSNU> pis1(j)=U(j)*dt/(4*dx); %#ok<SAGROW> end
for z= 1:it; t(z)=(z-1)*dt;
end %Le flux %Première configuration % for i=1:n % for z=1:21; % Q(z)=20*t(z); %#ok<SAGROW> % end % for z=21:41; % Q(z)=20*(1-t(z)); % end % end %%%%%%%%%%%%%%%%%%%%%%%%%%% %la deuxième configuration

50
% for z=1:it; % Q(z)=20*(sin(pi*t(z))); %#ok<SAGROW> % end %troisième configuration for i=1:n for z=1:it; Q(i,z)=20*x(i)*sin(pi*t(z)); %#ok<SAGROW> end end %***********la condition initiale************************ z=1; for i=1:n; for j=1:m; T(i,j,1)=0; %#ok<SAGROW> tpp(i)= T(i,j,z); %#ok<SAGROW> end end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Predicteur % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for z=2:it; for j=1:m; for i=1:n; tp(i,j,z)= tpp(i); %#ok<SAGROW> end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for j=2:m-1;
%premier noeud% (calorifugeage)
a(1)=0; b(1)=1; c(1)=0; d(1)=0;
%nœuds courants%
for i=2:n-1; a(i)=-pis1(j); %#ok<SAGROW> b(i)=1; %#ok<SAGROW> c(i)=pis1(j); %#ok<SAGROW> d(i)=(1-(2*pis2))*tp(i,j,z-1)+(pis2)*tp(i,j+1,z-1)+(pis2)*tp(i,j-
1,z-1); %#ok<SAGROW> end

51
Chapitre III
Résolution du problème
inverse par la méthode du gradient conjugué
ans cette dernière partie on introduira la méthode du gradient conjugué qui
consiste à transformer l’équation d’énergie (dit problème direct) en une équation
adjointe et une équation de sensibilité (équation de variation) et résoudre les trois
équations itérativement pour minimiser l’erreur de l’estimation. L’objectif est
ainsi d’estimer le flux de chaleur appliqué à la paroi de la conduite en utilisant la température
simulée.
D

52
III-1- INTRODUCTION
L’optimisation est un sujet très ancien qui connait un nouvel essor depuis l’apparition
des ordinateurs et dont les méthodes s’appliquent dans de très nombreux domaines :
économie, gestion, planification, logistique, automatique, robotique, conception optimale,
sciences de l’ingénieur, traitement de signal, etc. L’optimisation est aussi un sujet très vaste
qui touche aussi bien au calcul des variations, qu’à la recherche opérationnelle (domaine de
l’optimisation des processus de gestion ou de décision), en passant par le contrôle optimal.
D’une certaine manière, l’optimisation peut être vue comme une discipline indépendante de
l’analyse numérique des équations aux dérivées partielles que nous avons étudiées dans le
chapitre précédent. Cependant, les interactions entre ces deux disciplines sont extrêmement
nombreuses et fécondes.
Après l’étape de modélisation d’un phénomène physique ou d’un système industriel
(éventuellement à l’aide d’équations aux dérivées partielles), après l’étape de simulation
numérique sur ce modèle, la démarche du mathématicien appliqué (qu’il soit ingénieur ou
chercheur) ne s’arrête pas là : il lui faut souvent agir sur le phénomène ou le système afin d’en
améliorer certaines performances. Cette troisième étape est celle de l’optimisation, c’est-à-
dire celle de la minimisation (ou de la maximisation) d’une fonction qui dépend de la solution
du modèle [56].
Dans le cas le plus simple, le modèle sera une simple équation algébrique et il s’agira
simplement d’optimiser une fonction définie sur un simple espace de dimension finie
(disons ). Typiquement c’est la situation la plus fréquente en recherche opérationnelle.
La deuxième catégorie de problèmes correspond au cas où la fonction à optimiser dépend de
la solution d’une équation différentielle ordinaire (autrement dit, cette fonction est définie sur
un espace de dimension infinie). On parle ici de commande optimale, et les applications sont
très nombreuses en automatique et robotique.
La troisième et dernière catégorie correspond à l’optimisation de fonction d’une solution
d’une équation aux dérivées partielles. Il s’agit ici de la théorie du contrôle optimal où
s’inscrit notre étude.
Dans le problème direct, la distribution de vitesse (profil), les conditions initiales et les
conditions aux limites sont données pour ainsi trouver la distribution de température dans le
domaine étudié ; dans le problème inverse on tient compte de la température mesurée ou
simulée à l’intérieur de l’écoulement ou bien entre le fluide et la paroi solide.

53
L’objectif est ici de résoudre le problème inverse de conduction-convection forcée qui
consiste à estimer le flux thermique en ayant recours à la méthode du gradient conjugué avec
un problème adjoint et un problème sensitif ; cette méthode est basée sur l’introduction d’un
critère (différence entre la réponse mesurée (ou exacte) et celle calculée issue de la résolution
du problème direct) d’une part et sur la fonction à estimer d’autre part.
La méthode utilisée dans nos calculs est celle d’Alifanov [42] connue sous le nom de la
méthode du gradient conjugué avec problème adjoint. Le problème inverse est considéré
comme un problème d’optimisation dans lequel les multiplicateurs de Lagrange sont
introduits comme étant des contraintes d’optimisation et la fonction objectif est minimisée par
la méthode du gradient conjugué.
La connaissance du flux à partir de températures mesurées est un problème inverse et son
estimation peut être construite à partir d’un problème de minimisation de la fonction objectif
définie par [23, 24, 63, 64] :
∑∑( )
Où :
[ ] ∫ ∑[ ]
III-2- PROBLEME INVERSE DE LA CONFIGURATION PLANE
Dans le problème direct la distribution de vitesse, les conditions initiales et les
conditions aux limites sont connues, et permettent de déterminer la distribution de
température dans le domaine.
Dans le problème inverse on mesure la température à l’intérieur du fluide ou à l’interface
entre le solide et le fluide pour estimer le flux de chaleur.
Dans le cas présent, l’épaisseur de la paroi du cylindre est supposée très faible de
sorte que la conduction soit négligeable et les mêmes conditions appliquées sur la paroi solide
sont appliquées sur les limites du fluide.
La connaissance du flux de chaleur à partir de la mesure de température peut être construite
comme un problème de minimisation de la fonction objectif décrite comme suit :

54
III-2-1- La fonctionnelle J (ou bien la fonction objectif)
La fonction J ou fonction objectif est définie par [24]:
∑∑( )
Avec est la température calculée du problème direct pour un flux de
chaleur connu
est la température mesurée.
La température mesurée est simulée en ajoutant des erreurs aléatoires à la température calculée à
partir de la solution du problème direct [ ] :
où est à l'écart type des données de mesure, est une variable aléatoire de distribution
normale à zéro tel que :
III-2-2- Le problème sensitif
Il s’agit globalement dans le problème sensitif de dégager les équations et conditions spatio-
temporelles qui permettront de concevoir une estimation optimale, c’est-à-dire un système qui
permettra de déterminer avec la plus grande précision possible les paramètres à estimer.
Quelle que soit la méthode inverse à utiliser, la qualité des résultats à estimer dépend
énormément de la sensibilité des mesures aux variations de paramètres, c’est pour quoi il faut
choisir avec un grand soin le critère de sensibilité parmi les paramètres ajustables et les
entrées contrôlables du système.
Le coefficient de sensibilité (issu du problème sensitif) indique physiquement et
quantitativement la variation de la température en un point X à l’instant t lorsque le paramètre
à estimer varie. Cette estimation nous procure une grande précision lorsque ce coefficient est
grand, ce qui permet de calculer la variation de la température engendrée par la variation du
paramètre à estimer.
Le problème sensitif est obtenu en perturbant la température et le flux respectivement, c'est-à-
dire la température par et le flux par ; on les remplace dans le problème
direct puis on fait une soustraction entre les deux équations en négligeant le second ordre.
Il en reste :

55
{
Dans notre cas et pour des raisons de simplification on a pris uniquement l’équation
concernant la partie fluide du système. Les conditions appliquées sont les suivantes :
Avec :

56
III-2-3- Problème adjoint et équations du gradient
Pour obtenir le problème de l’état adjoint, on intègre les équations du domaine solide
et fluide sur leur contour respectif et en temps et on les multiplie respectivement par les
coefficients de l’état adjoint dont la dénomination est respectivement et
. La quantité obtenue est ajoutée à la partie droite de la fonctionnelle .
[ ] ∑∑( )
∫ ∫ ∫ [
]
∫ ∫ ∫ [
]
Formulation du gradient de la fonctionnelle :
Le terme
désigne le gradient de la fonction objectif [ ]
Pour cela on doit d’abord calculer
On a ainsi :
∑∑[ ]
∫ ∫ ∫ [
]
∫ ∫ ∫ [
]
Avec :
{
On intègre par partie le deuxième et troisième terme.

57
Intégrale1
∫ ∫ ∫
∫ ∫
|
∫ ∫ ∫
On trouve :
∫ ∫ ( )
( ) ∫ ∫
∫ ∫ ∫
Intégrale 2
∫ ∫ ∫
∫ ∫
|
∫ ∫ ∫
On trouve :
∫ ∫
∫
∫
∫ ∫ ∫
Intégrale 3
∫ ∫ ∫
∫ ∫
|
∫ ∫ ∫

58
On trouve :
∫ ∫
∫ ∫
∫ ∫ ∫
On nomme l’intégrale :
∫ ∫ ∫
On fait une intégration par partie pour cette intégrale également :
∫ ∫
|
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
On trouve :
∫ ∫
∫ ∫
∫ ∫ ∫

59
L’intégrale 3 s’écrit alors:
∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
Intégrale 4
∫ ∫ ∫
∫ ∫
|
∫ ∫ ∫
On trouve :
∫ ∫ ( )
( ) ∫ ∫
∫ ∫ ∫

60
Intégrale 5
∫ ∫ ∫
∫ ∫
|
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫
|
∫ ∫ ∫
On trouve :
∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
On a donc pour la partie fluide :
Ce qui donne :

61
∫ ∫ ( )
( ) ∫ ∫
∫ ∫ ∫
∫ ∫
∫
∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
Pour la partie solide :
∫ ∫ ( )
( ) ∫ ∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
Compte tenu des conditions aux limites il en reste pour la partie fluide en la faisant tendre
vers zéro :

62
∫ ∫ ∫
∫ ∫ ∫
∫ ∫ ∫
∑∑[ ]
Ou encore :
[
]
[ ]
En divisant par , il en reste :
[
] [ ]
Avec les conditions :
( )
[ ]
[ ]
Le système d’équation différentielle avec les conditions aux limites est appelé équation
Adjointe ou problème adjoint.

63
III-2-4- Gradient du critère
Le choix du critère repose sur le choix de l’intégrale double qui définit les frontières du
paramètre à estimer (le flux est en fonction de « X » et « ») et qui fournit l’information sur
le sujet à estimer, dans notre cas c’est le flux de chaleur, on déduit donc le gradient du critère :
( ) ∫ ∫
Et on par définition :
( ) ∫ ∫
Ce qui donne :
III-2-5- Calcul du pas de la descente
Le procès itératif est donné par [21] :
On a :
(
) (
) ∑∑( )
Et par le développement du Taylor on obtient :
( ) (
) (
) ∑∑
Et :
(
) ∑∑[( (
) ∑∑
) ]
∑∑[( (
) ∑∑
)]
∑∑[( (
) ) ∑∑
( (
) )
( ∑∑
)
]

64
La condition d’optimalité s’écrit :
Ce qui donne :
∑∑( ∑∑
( (
) ))
(∑∑
)
Et:
∑ ∑ ( (
) ) ∑ ∑
(∑ ∑
)
III-2-6- Calcul de la descente
La descente
est définie par :
Dans le cas où p = 0, la direction de la descente devient le gradient du critère.
Avec :
∑ ∑ (
)
∑ ∑ ( )
Et :
III-3- RESOLUTION NUMERIQUE DU PROBLEME INVERSE DE LA
CONFIGURATION PLANE
III-3-1- Discrétisation de l’équation adjointe
III-3-1-1- Premier demi-pas de temps
Dans notre cas on utilise la méthode ADI pour discrétiser cette équation
On a :

65
On aura ainsi :
(
)
(
)
Elle devient :
Avec :
III-3-1-2- Deuxième demi-pas de temps

66
On aura ainsi :
Avec :
[ ]
Ce qui donne :
(
)
(
)
Ou enfin :
Avec les conditions suivantes :

67
[ ]
[ ]
Ainsi le problème adjoint se résume comme suit :
Avec les conditions suivantes :
[ ]
[ ]
III-3-2- Equation de sensibilité
De même, on procède à la discrétisation par la méthode ADI
III-3-2-1- Premier demi-pas de temps

68
On aura ainsi :
(
)
(
)
Il en reste :
III-3-2-2- Deuxième demi-pas du temps
On aura ainsi :

69
(
)
(
)
Elle devient :
Avec les conditions suivantes :
Le problème sensitif se résume comme suit :
Avec les conditions suivantes :

70
Les étapes de résolution du problème adjoint se résument comme suit :
1- Trouver
2- connu, on calcule
3- connu, on calcule
4- connu, on calcule
Ce qui implique que le problème d’état adjoint nous mène à calculer la direction de la
descente.
Les étapes de résolution de l’équation sensitive se résument comme suit :
1- Trouver
2- et Δ connus, on procède au calcul de
Dans ce genre de problème sensitif, on calcule le pas de la descente
et connus, on calcule la nouvelle valeur de
.
La condition peut être utilisée pour déterminer le processus itératif où est un
nombre positif très petit.
Comme critère d’arrêt on choisi , on aura ainsi:
( ) où : est l’écart type de mesure.
La procédure numérique utilisée pour la résolution du problème inverse est résumée de la
façon suivante :
Etape 1 : résoudre le problème sensitif afin de calculer le coefficient sensitif
Etape 2 : choisir un flux initial
Etape 3 : résoudre le problème direct pour obtenir les
Etape 4 : calculer de la fonction objectif. Finir le processus itératif si le critère d’arrêt est
satisfait sinon aller à l’étape 5.
Etape 5 : connaissant , et on calcule le gracient de la fonction objectif .
Etape 6 : connaissant on procède au calcul de et
.
Etape 7 : connaissant , , et
on calcule .
Etape 8 : connaissant et
on calcule
.
On met p = p+1 puis on recommence de l’étape 3.
Le flux initial est pris zéro ( .

71
III-4- PROBLEME INVERSE DE LA CONFIGURATION CYLINDRIQUE
Dans le problème inverse on cherche à trouver l’inconnue q (x, t) tout en admettant
que toute les inconnues du problème direct sont connues.
La solution du présent problème inverse est obtenue tout en minimisant la fonction objectif :
[ ] ∫ ∑[ ]
(Durant toute la résolution qui suit on a utilisé la forme dimensionnelle des variables telles
quelles sont définies dans les équations (voir chapitre II))
représente la température calculée dans le problème direct au point de
coordonnée en utilisant un flux qui représente la quantité estimée à la Kème
itération. représente le temps final de mesure.
III-4-1- Problème sensitif
Le problème sensitif est construit du problème direct en perturbant le flux par
, par , puis en remplaçant respectivement par et par
puis on soustrait le problème direct du problème qu’on trouvera et on néglige les termes du
second ordre, le problème sensitif prend la forme suivante ::
(
)
(
)
à x = 0 : ;
à x = L et 0 < r < R+E :
;
à r = 0 et 0 < x < L :
= 0;
à r = R et 0 < x < L : ;

72
à r = R et 0 < x < L : Ks
= Kf
;
à r = R+E et : Ks
=
à r = R+E et 0 < x < , < x < L :
=0.
Le problème sensitif peut être résolu comme le problème direct.
III-4-2- Problème adjoint et équations du gradient
Pour obtenir le problème de l’état adjoint on intègre les équations du domaine solide et
fluide sur leur contour respectif et en temps et on les multiplie respectivement par les
coefficients de l’état adjoint dont la dénomination est respectivement et .
La quantité obtenue est ajoutée à la partie droite de la fonctionnelle .
[ ] ∫ ∑[ ]
∫ ∫ ∫ [
]
∫ ∫ ∫ [
]
La variation est obtenue en perturbant par et par dans l’équation précédente,
puis on soustrait l’équation précédente de celle résultante en négligeant les termes de second
ordre, on trouve :

73
[ ] ∫ ∫ ∫ [ ]
∫ ∫ ∫ [
]
∫ ∫ ∫ [
]
Où est la fonction de Dirac, on peut intégrer le deuxième et le troisième termes par partie,
puis en utilisant les conditions initiales et aux limites et on fait tendre vers zéro, les
intégrales contenant étant nulles ce qui permet de déterminer les valeurs de et
, on trouve ainsi:
Intégrale1 :
∫ ∫ ∫ [
]
∫ ∫
∫ ∫
∫ ∫ ∫
Intégrale 2
∫ ∫
∫ [
]
∫ ∫
∫ ∫
∫ ∫ ∫

74
Intégrale 3
∫ ∫ ∫ [
]
∫ ∫
∫ ∫
∫ ∫ ∫
Intégrale 4
∫ ∫ ∫ [
]
∫ ∫
∫ ∫
∫ ∫ ∫ [
]
La somme des intégrales nous donne :

75
∫ ∫
∫ ∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫ ∫ ∫
En résonnant de la même manière que pour la partie fluide, c'est-à-dire par intégration par
partie et en tenant compte des conditions aux limites et initiale, on simplifie cette écriture et
on aura ainsi :

76
à x=0
à x= L, R< r < R+E
à x = L, 0< r <R
, à r = 0, 0 <x< L
, à r = 0, 0 <x< L
, à r = 0, 0 <x< L
, à r = R, 0 <x< L
, à
Le problème de l’état adjoint est différent du problème standard de l’état initial dans la
condition finale de temps à : , qui est spécifiée à l’état initial. Toutefois le problème de
l’état adjoint peut être transformé en un problème de l’état initial en posant ainsi,
le problème de l’état adjoint peut être résolu comme le problème direct.
Comme dans la résolution du problème à deux plaques on choisit l’intégrale qui nous fournit
d’information sur le flux de chaleur car c’est le paramètre à estimer, on trouve ainsi :
∫ ∫
Et de la définition utilisée dans [63] on a :
∫ ∫
Où, est le gradient de la fonctionnelle [ ] on trouve par comparaison :
.

77
III-5- RESOLUTION NUMERIQUE DU PROBLEME INVERSE DE LA
CONFIGURATION CYLINDRIQUE
III-5-1- Discrétisation des équations du problème direct
De la même manière, on utilise le même schéma de discrétisation (ADI) :
Premier pas de temps :
De
, implicite suivant la direction « x » et explicite suivant la direction du rayon
Partie fluide
|
|
|
|
Ce qui donne :
D’où ;
[
]
[
]
[
]
[
]

78
On pose :
On trouve :
Partie solide
|
|
|
Ce qui donne
En réarrangent les termes on trouve :
[
]
[
]
[
]
On pose :
D’où ;

79
Deuxième demi pas de temps : Schéma explicite en et implicite en « x ». C'est un schéma
aux différences centrées, au temps (n +1/2) pour les dérivées en et au temps (n+1) pour les
dérivées en « x ». La discrétisation des dérivées partielles est donnée par:
Partie fluide
|
|
|
|
Ce qui donne :
En réarrangent les termes on trouve :
[
]
[
]
[
]
[
]
Avec :
D’où ;
Partie solide

80
|
|
|
Ce qui donne :
En réarrangent les termes on trouve :
[
]
[
]
[
]
Avec :
D’où :
Discrétisation des conditions aux limites
à : ; |
|
à : ; |
|
à : et ;
|
|
à : et ; |
|
à : et ; |
|

81
à : et ;
( )
( )
|
( )
( )
|
à : et ;
( )
( )
|
à : et
{
( ) ( )
|
( )
( )
|
III-5-2-Discrétisation de l’équation adjointe
L’équation adjointe est donnée par :
[ ]
On pose :
[ ]
Premier demi-pas de temps
Partie fluide
On utilise la méthode ADI pour discrétiser cette équation :
|
|
|
|
Ce qui donne :

82
En réarrangent les termes on aura :
[
]
[
]
[
]
[
]
Avec :
Ce qui donne
Partie solide
On prend :
|
|
|
|
Ce qui implique :
En réarrangent les termes de l’équation on trouve :
[
]
[
]
[
]

83
Ce qui donne :
Avec les conditions spatio-temporelles suivantes :
Deuxième demi-pas de temps
Schéma explicite en et implicite en « x ». C'est un schéma aux différences centrées, au
temps (n +1/2) pour les dérivées en et au temps (n+1) pour les dérivées en « x ». La
discrétisation des dérivées partielles est donnée par:
|
|
|
|
Partie fluide

84
En réarrangent les termes de cette l’équation on trouve :
[
] [
]
[
] [
]
Ce qui donne :
Partie solide
D’où ;
[
] [
]
[
]
Ce qui donne :
Ainsi le système d’équation s’écrit :
Partie fluide
{
Partie solide
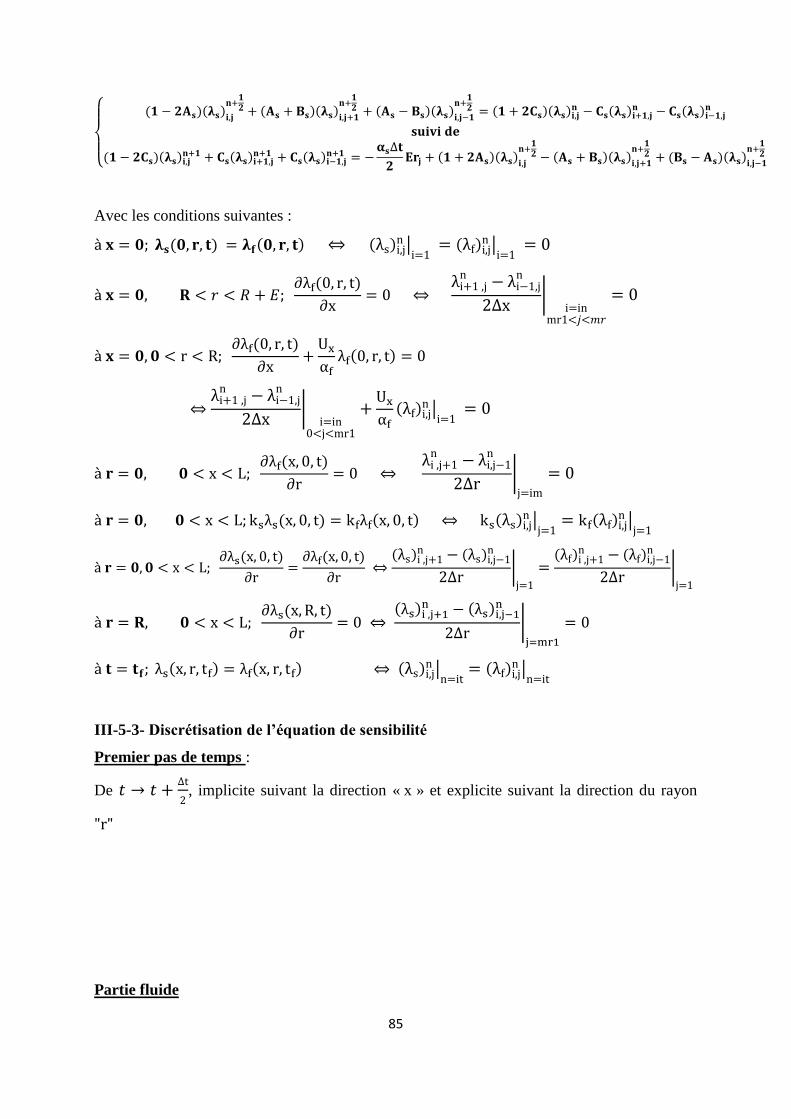
85
{
Avec les conditions suivantes :
|
|
|
|
|
|
|
|
|
|
|
|
|
III-5-3- Discrétisation de l’équation de sensibilité
Premier pas de temps :
De
, implicite suivant la direction « x » et explicite suivant la direction du rayon
Partie fluide

86
|
|
|
|
Ce qui donne :
D’où ;
[
]
[
]
[
]
[
]
En réarrangeant les termes on trouve :
avec :
D’où :
Partie solide

87
|
|
|
Ce qui donne
En réarrangent les termes on trouve :
[
]
[
]
[
]
avec :
D’où :
Deuxième demi pas de temps : Schéma explicite en et implicite en « x ». C'est un schéma
aux différences centrées, au temps (n +1/2) pour les dérivées en et au temps (n+1) pour les
dérivées en « x ». La discrétisation des dérivées partielles est donnée par:
Partie fluide

88
|
|
|
|
Ce qui donne :
En réarrangent les termes on trouve :
[
]
[
]
[
]
[
]
Avec :
D’où :

89
Partie solide
|
|
|
Ce qui donne :
En réarrangent les termes on trouve :
[
]
[
]
[
]
Avec :
D’où :
Discrétisation des conditions aux limites

90
à : ; |
|
à : ; |
|
à : et ;
|
|
à : et ; |
|
à : et ; |
|
à : et ;
( )
( )
|
( )
( )
|
à : et ;
( )
( )
|
à : et
{
( )
( )
|
( )
( )
|
Ainsi le problème sensitif se résume au système suivant :
Partie fluide
{
Partie solide
{
Avec les conditions aux limites suivantes :

91
à : ; |
|
à : ; |
|
à : et ;
|
|
à : et ; |
|
à : et ; |
|
à : et ;
( )
( )
|
( )
( )
|
à : et ;
( )
( )
|
à : et
{
( )
( )
|
( )
( )
|
III-6- APPLICATION DE LA METHODE DU GRADIENT CONJUGUE POUR LA
MINIMISATION
On suppose que et sont disponibles à la Kème
itération, le processus itératif de la méthode du gradient conjugué est utilisé pour estimer le
flux de chaleur , et ça en minimisant la fonctionnelle [ ].
La fonction (flux de chaleur ) peut être évaluée à la Kème+1
itération comme suit :
Avec :
: le pas
: la direction de la descente qui est déterminée comme suit :
: est le coefficient conjugué qui est donné par la formule :

92
∫ ∫ [
]
∫ ∫ [ ]
Pour calculer le et vérifier ainsi le processus itératif, on doit calculer et le
gradient de la fonctionnelle .
La fonctionnelle [ ] à l’itération est obtenue en réécrivant l’équation :
[ ] ∫ ∑[ ]
sous la forme :
[ ] ∫ ∑[ ( ) ]
( ) (
) (Linéarisation par la série de Tylor) ainsi,
[ ] ∫ ∑[ ( )
]
Où, ( ) est la solution du problème direct,
est prise comme solution du problème
sensitif, est déterminée en minimisant la fonctionnelle J, il est donné comme suit :
∫ ∑
[ ( ) ]
∫ ∑ [ ]
Critère d’arrêt
Si le problème ne contient pas d’erreurs de mesure, la condition de minimisation du critère
est : ( ) ,
Où, dépend de l’exactitude de la solution du problème direct.

93
Pour des mesures de températures Y, perturbées par des petites variations (erreurs relatives
avec la déviation standard ou bien l’écart type de mesures ) ainsi, on pose :
Ainsi, la procédure numérique utilisée pour la résolution de problème inverse est résumée de
la façon suivante :
Etape 1 : résoudre le problème direct et déterminer et , respectivement.
Etape 2 : vérifier le critère d’arrêt, sinon on continue ;
Etape 3 : résoudre le problème d’état adjoint pour trouver et ;
Etape 4 : calculer le gradient de la fonctionnelle (
Etape 5 : calculer le coefficient conjugué et la direction de la descente respectivement ;
Etape 6 : mettre et résoudre le problème sensitif pour trouver et
, respectivement ;
Etape 7 : calculer le pas
Etape 8 : calculer la nouvelle estimation et retourner à l’étape 1
III-7- ORGANIGRAMME DE LA PROCEDURE INVERSE

94
NON OUI
III-8 – RESULTATS ET DISCUSSIONS
Résolution du problème
direct 𝐐𝒌
Solution numérique exacte
ou valeurs expérimentales
𝐉 ∑∑(𝜃𝑓 𝑖 𝑘 𝑍 𝑖 𝑘)
𝑖𝑡
𝑧
𝑛
𝑖
Calcul de la fonction
objectif
𝐉 𝜀 Résolution du problème adjoint pour
trouver 𝛌
Calcul du graduent de la fonction
objectif 𝐉
Calcul de 𝛄
Calcul de la direction de la
descente 𝐝𝒌
Résolution du problème sensitif ou
de variation pour calculer 𝚫𝛉
Calcul du pas ou profondeur de la
descente 𝐁𝒌
Calcul de 𝐐𝒌 𝟏 𝐐𝒌
𝐁𝒌𝐝𝒌
k=k+
1
Fin
Organigramme de la méthode du gradient conjugué avec le problème
adjoint et le problème sensitif utilisé dans notre démarche

95
Pour prouver la fiabilité de la méthode proposée, l’estimation du flux de chaleur
appliqué sur la paroi supérieure à partir de températures simulées est investie.
La température mesurée Z est simulée en ajoutant une erreur aléatoire à la valeur de la
température du problème direct [23] :
Où, est l’écart type
est une erreur aléatoire telle que : [24]
Dans nos calculs l’erreur aléatoire est prise égale :
Dans ce travail, on considère deux configurations du flux thermique (une fonction triangulaire
et une fonction sinusoïdale dépendantes du temps).
On définit l’erreur absolue moyenne comme étant :
∑ | |
,
Où, est le résultat estimé et est le résultat mesuré, est le pas de temps, ainsi pour des
petites valeurs de on a une meilleure estimation.
Nos résultats ont été validés en les comparant aux résultats de David, T.W et al. [24] (figures
III.1 et III.2, figures III.3 et III.4)
Les figures (III.1, III.3, III.5 et III.6) représentent la solution du problème inverse pour deux
configurations du flux (triangulaire et sinusoïdale) et pour un écart type . Les résultats
montrent que les valeurs du flux simulé sont très proches dans chaque cas des valeurs du flux
mesuré.
Figure III.1 : Estimation du flux par l’analyse inverse pour .
Fonction sinusoidale
0 0.2 0.4 0.6 0.8 10
5
10
15
20
25
t
Q
Résultat exacte
sigma =0

96
Figure III.2. Estimation du flux par l’analyse inverse.
Résultats de David, T.W et al. [21]
Figure III.3. Estimation du flux par l’analyse inverse pour
Fonction triangulaire
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2
0
2
4
6
8
10
Temps
Flu
x Q
Flux exacte
Itération h = 20
Itération h = 15

97
Figure III.4. Estimation du flux par l’analyse inverse.
Résultats de David, T.W et al. [21]
Figure III.5. Estimation du flux par l’analyse inverse pour
Fonction sinusoïdale
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
Temps
le f
lux
Q
Itération h = 15
Itération h = 20
Flux exacte

98
Figure III.6. Estimation du flux par l’analyse inverse pour à différentes position de « X »
Fonction sinusoïdale
Les résultats obtenus avec les trois configurations (triangulaire, sinusoïdale et spatio-
temporelle) pour différentes valeurs de l’écart type montrent
que les valeurs calculées du flux thermique se rapprochent des valeurs mesurées au fur et à
mesure que le nombre d’itérations augmentent (Figures III.7 à III.14). Les tableaux III.1 et
III.2 donnent les erreurs relatives sur le flux et la température respectivement après 40
itérations.
Tableau III.1 : Erreur relative sur la température pour les trois configurations
Configuration
triangulaire
Configuration
sinusoïdale
Configuration spatio-
temporelle
ErrT(%) 0.5355 0.4921 0.5690
Tableau III.2 : Erreur relative sur le flux de chaleur pour les trois configurations
Configuration
triangulaire
Configuration
sinusoïdale
Configuration spatio-
temporelle
ErrQ(%) 3.32 1.34 5.67
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
14
16
18
t
Q
Flux exacte pour X=0.3
Flux exacte pour X=0.6
Flux exacte pour X=0.9
Flux estimé à X=0.3
Flux estimé à X=0.6
Flux estimé à X=0.9

99
Figure III.7. Estimation du flux par l’analyse inverse pour
à différentes itérations, Configuration triangulaire
Figure III.8. Estimation du flux par l’analyse inverse pour
après 40 itérations, configuration sinusoïdale
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2
0
2
4
6
8
10
12
14
temps
Flu
x
estim
é
Q2
Flux exact
itération h = 10
itération h = 30
itération h = 40
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
temps
Flu
x e
stim
é
Q2
Flux exact
sigma = 0.003
sigma = 0.005

100
Figure III.9. Estimation du flux par l’analyse inverse pour à différentes itérations
Configuration sinusoïdale
Figure III.10. Estimation du flux par l’analyse inverse pour à différentes itérations
Configuration sinusoïdale
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
temps
Flu
x e
stim
é Q
2
Flux exact
itération h = 10
itération h = 30
itération h = 40
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
30
temps
Flu
x e
stim
er
Q2
Flux exact
itération h = 10
itération h = 25
itération h = 40

101
Figure III.11. Estimation du flux par l’analyse inverse pour
Configuration spatio-temporelle
Figure III.12. Estimation du flux par l’analyse inverse pour pour différentes itérations
Configuration spatio-temporelle
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
temps
Flu
x e
stim
é Q
2
Flux exact
sigma = 0.008
sigma = 0.005
sigma = 0.002
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
temps
Flu
x e
stim
é Q
2
Flux exact
itération h = 10
itération h = 20
itération h = 40

102
Figure III.13. Estimation du flux par l’analyse inverse pour pour différentes itérations
Configuration spatio-temporelle
Figure III.14. Estimation du flux par l’analyse inverse pour pour différentes itérations
Configuration spatio-temporelle
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
30
temps
Flu
x e
stim
é Q
2
Flux exact
itération h = 10
itération h = 20
itération h = 40
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
30
35
temps
Flu
x e
stim
é Q
2
Flux exact
itération h = 10
itération h = 20
itération h = 40

103
L’erreur relative sur la température est définie par :
∑∑∑|
|
Avec :
: Température calculée en utilisant la méthode inverse ;
: Température ‘mesurée’ ;
: Nombre total de nœuds selon l’abscisse de la position x ;
: Nombre total de nœuds selon l’abscisse de la position y ;
: Nombre total de nœuds selon l’abscisse du temps.
L’erreur relative sur le flux est définie par :
∑|
|
Avec :
: flux calculé par la méthode inverse ;
: flux exact ;
: Nombre total de nœuds selon l’abscisse du temps.
III-9- CONCLUSION
Dans ce chapitre, nous avons développé un code de calcul basé sur la méthode du gradient
conjugué pour résoudre le problème inverse de la convection forcée dans une conduite à
plaques parallèles à deux dimensions, afin d’estimer le flux de chaleur appliqué à la paroi
supérieure du conduit.
Le schéma de discrétisation en deux pas du temps (méthode ADI) appliqué a abouti à un
système tridiagonal qui a été résolu par l’algorithme de Thomas.
L’exécution du programme numérique a donné des résultats très intéressants puisqu’on a pu
estimer la température et le flux thermique avec des erreurs relatives faibles.

104
III-10- PARTIE DU PROGRAMME INFORMATIQUE DU PROBLEME INVERSE
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % DEMARRAGE DU PROBLEME INVERSE EN DEUX DIMENSIONS % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% for z=1:it %for j=m; for i=1:n; ECT(i,z)=(T(i,m,z)-Z(i,m,z));%#ok<SAGROW>% %#ok<SAGROW>l'erreur
Err(i)Z: températurecalculée.
cgc1(i,z)=(((T(i,m,z)-Z(i,m,z))^2)); %#ok<SAGROW>
end %end end J(h)=sum(sum(cgc1(:,:)));%#ok<SAGROW>% critère du gradiant(nit:
nombre d'itérations)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % resolution de l'équation adjointe par méthode numérique de différences % % finies%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
z=it; for j=1:m; for i=1:n; P(i,j,it)=0;%#ok<SAGROW> % % %condition finale sur les coefficient de
lagrange pp(i)=P(i,j,z); %#ok<SAGROW> end end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%% % le prédicteur % %%%%%%%%%%%%%%%%%%%%% for j=1:m; for i=1:n; p(i,j,z)=pp(i); %#ok<SAGROW> end end for z=2:it;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% for j=2:m-1; %premier noeud a(1)=0; b(1)=1; c(1)=0; d(1)=0; %Noeuds courants for i=2:n-1 a(i)=-pis1(j); %#ok<SAGROW> b(i)=1; %#ok<SAGROW> c(i)=pis1(j); %#ok<SAGROW>
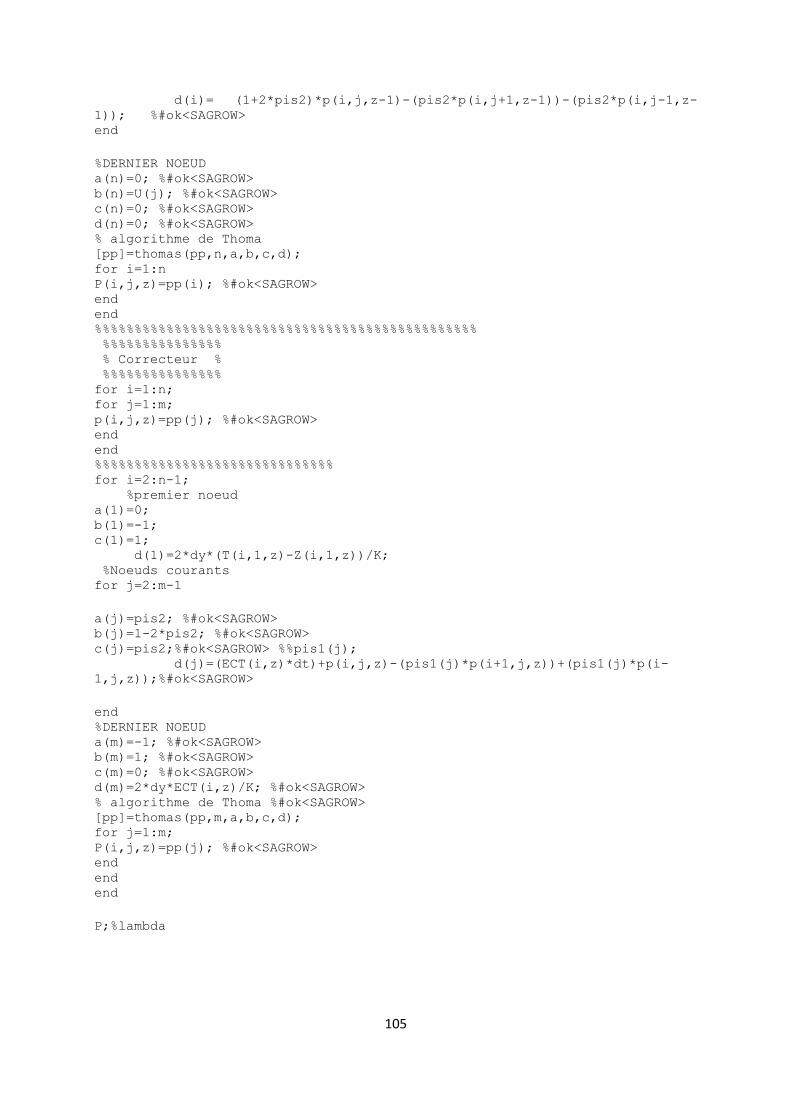
105
d(i)= (1+2*pis2)*p(i,j,z-1)-(pis2*p(i,j+1,z-1))-(pis2*p(i,j-1,z-
1)); %#ok<SAGROW> end
%DERNIER NOEUD a(n)=0; %#ok<SAGROW> b(n)=U(j); %#ok<SAGROW> c(n)=0; %#ok<SAGROW> d(n)=0; %#ok<SAGROW> % algorithme de Thoma [pp]=thomas(pp,n,a,b,c,d); for i=1:n P(i,j,z)=pp(i); %#ok<SAGROW> end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% % Correcteur % %%%%%%%%%%%%%%% for i=1:n; for j=1:m; p(i,j,z)=pp(j); %#ok<SAGROW> end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% for i=2:n-1; %premier noeud a(1)=0; b(1)=-1; c(1)=1; d(1)=2*dy*(T(i,1,z)-Z(i,1,z))/K; %Noeuds courants for j=2:m-1
a(j)=pis2; %#ok<SAGROW> b(j)=1-2*pis2; %#ok<SAGROW> c(j)=pis2;%#ok<SAGROW> %%pis1(j); d(j)=(ECT(i,z)*dt)+p(i,j,z)-(pis1(j)*p(i+1,j,z))+(pis1(j)*p(i-
1,j,z));%#ok<SAGROW>
end %DERNIER NOEUD a(m)=-1; %#ok<SAGROW> b(m)=1; %#ok<SAGROW> c(m)=0; %#ok<SAGROW> d(m)=2*dy*ECT(i,z)/K; %#ok<SAGROW> % algorithme de Thoma %#ok<SAGROW> [pp]=thomas(pp,m,a,b,c,d); for j=1:m; P(i,j,z)=pp(j); %#ok<SAGROW> end end end
P;%lambda

106
Conclusion Générale
Le travail réalisé dans le cadre de ce mémoire est destiné à mieux comprendre les
processus de la convection forcée impliquée dans le dimensionnement des échangeurs
thermiques. Une condition de flux imposé est appliquée à la paroi supérieure de la conduite
constituant l’échangeur de chaleur.
Le sujet traité nous a permis de connaitre et de mettre en œuvre plusieurs méthodes
analytiques et numériques :
- méthode des différences finies où le système d’équations est discrétisé selon la
méthode implicite des directions alternées (ADI).
- méthode du gradient conjugué
- méthode de résolution matricielle basée sur l’algorithme de Thomas TDMA (Tri-
DiagonalMatrixAlgorithm).
L’étude s’est focalisée sur le problème d’estimation du flux de chaleur en régime
instationnaire impliquant l’échange de chaleur par convection forcée entre deux plaques
parallèles. L’objectif principal était la mise en œuvre d’une méthode inverse utilisant le
gradient conjugué permettant pour la résolution des équations dans un système
bidimensionnel.
Afin de réduire les équations aux dérivées partielles décrivant le phénomène des
échanges thermiques par convection forcée à un système différentiel ordinaire, difficilement
résolvable à cause de sa non linéarité, un algorithme de résolution du problème direct à deux
dimensions combine la discrétisation spatiale et temporelle par une technique des différences
finies dite méthode implicite des directions alternées ADI a été appliqué.
Pour estimer le flux thermique appliqué sur la paroi de la conduite, la méthode du
gradient conjugué a été utilisée, et qui consiste à transformer l’équation d’énergie (dit
problème direct) en une équation adjointe et une équation de sensibilité (équation de
variation) et résoudre les trois équations itérativement pour minimiser l’erreur de l’estimation.
Les résultats numériques obtenus, montrent l'efficacité de la méthode, tant au niveau
précision qu'au niveau implantation et exécution.

107
L’exécution du programme numérique a donné des résultats très intéressant dans le cas
du problème direct puisqu’on a pu aboutir à la solution exacte avec des erreurs relatives
faibles pour le flux thermique, et ce pour trois configurations différentes du flux imposé : une
évolution rectangulaire en fonction du temps, une évolution sinusoïdale en fonction du temps
et une évolution spatio-temporelle.
Dans le cas du problème inverse, le code numérique développé a permis d’obtenir des
solutions très proches de celles obtenues dans des travaux antérieurs comme ceux de David,
T.W et al.
La simulation numérique présentée pourrait être poursuivie dans des cas plus
complexes tels que : géométrie cylindrique, transferts couplés, …
108
Références Bibliographiques
[1]. Jannot, Y.2009. Transferts thermiques : Cours Transferts thermiques 2 ème année
Ecole Mines Nancy.
[2]. Bobin, J.L., Huffer, E., Nifenecker, H .2005. L’énergie de demain : technique
environnement économie. Paris : EDP sciences. 371p.
[3]. Meunier, F. 2005. Domestiquer l’effet de serre : énergies et développement durable.
Paris : Dunod. p. 71-78.
[4]. BOULAADJOUL, Y. Estimation de fonctions en conduction inverse. Mémoire de
magistère : université de Boumerdes. 102p.
[5]. HAMADA, K. étude du transfert de chaleur à travers une ailette verticale. Thèse de
magistère : université de Constantine. 78p.
[6]. Kern, M. 2002.Problèmes inverses. Ecole supérieur d’ingénieurs Léonard de
Vinci.140p.
[7]. Volle, F. 2006. Conduction inverse sur un cylindre en rotation : cas de l’ébullition
convective induite par l’impact d’un jet d’eau. Thèse de doctorat : université Henri
Poincaré – Nancy1. 196p.
[8]. Le Niliot (2002). La méthode des Eléments de Frontière pour la Résolution de
Problèmes Inverses en Conduction de la Chaleur : Applications numériques et
Expérimentales. Habilitation à diriger des recherches : Université de Provence. 150p.
[9]. Luciani, S.E. (2009). Instrumentation locale et techniques inverses appliquées à la
caractérisation de l’ébullition convective en microgravité au sein de minicanaux.
Thèse de doctorat : université d’Aix- Marseille I. 304p.
[10]. Lu. T. et all. 2011. A two-dimensional inverse heat conduction problem in estimating
the fluid temperature in a pipeline, Applied Thermal Engineering, Mars 2010, vol.30,
p.1574- 1579.
[11]. Huang, C.H., Tsai, Y.L. 2005. A transient 3-D inverse problem in imaging the time-
dependent local heat transfer coefficients for plate fin, Applied Thermal Engineering,
Février 2005, vol.25, p.2478- 2495.
[12]. Momayez, L. et All. 2009. Genetic algorithm based correlations for heat transfer
calculation on concave surfaces, Applied Thermal Engineering, Juin 2009, vol.29,
p.3476-3481.

109
[13]. Alifanov, O., et al.(2007). An experimental-computational system for materials
thermal properties determination and its application for spacecraft structures testing.
Acta Astronautica, Vol.61, p.341–351.
[14]. Muuniz, W., Velho, H. F. C., and Ramos, F. M. (1999). A comparison of some
inverse methods for estimating the initial condition of the heat equation. Journal of
Computation Applied Mathematics, Vol.103, p.145–163.
[15]. Huang, C. H. and Chen, W. C. (2000). A three dimensional inverse forced
convection problem in estimating surface heat flux by conjugate gradient method.
IJHMT, Vol.43, p. 3171–3181.
[16]. Li, H.Y., Yan, W.M. (2003). Identification of wall heat flux for turbulent forced
convection by inverse analysis. IJHMT, Vol.46, n°6, p.1041–1048.
[17]. Ching, S.C., Huang, C.H. (2000). A two dimensional inverse problem in imaging the
thermal conductivity of a non-homogenous medium. IJHMT, Vol.43, p.4061–4071.
[18]. Popa, C.V. Novembre2004. Etude théorique et expérimentale du comportement
Transitoire d’un écoulement laminaire en convection mixte dans un tube vertical.
Thèse de doctorat : Université de Reims Champagne-Ardenne. 183p.
[19]. Moitsheki, R.J., Rowjee, A. 2011. Steady heat transfer through a two dimensional
rectangular straight fin, Mathematical problems in engineering, Hindawi Publishing
Corporation, Johannesburg (South Africa), 13p.
[20]. Benyousef, B. et al. 2007. Analyse numérique de la convection forcée turbulente
dans les tubes munis des chicanes transversales, 13èmes Journées Internationales de
Thermique, Aout 2007, 5p.
[21]. ROBICHAUD, M. et al. 1987. Simulation bidimensionnelle de phénomène de
convection naturelle et forcée en formulation primitive. The Canadian journal of
chemical engineering, aout 1987, vol.65, p.550-558.
[22]. Redjem Saad, L.2008. Simulation numérique des transferts de chaleur turbulents par
convection forcée dans des conduites cylindriques et des espaces annulaires. Thèse
de doctorat : université Paris est Marne-la-vallée.159p.
[23]. Chen, W.L. Et al. 2008. Inverse problem of estimating transient heat transfer rate on
external wall of forced convection pipe. Energy Conversion and Management, avril
2008, vol. 49, p. 2117-2123.
[24]. David T.W. LIN. Et al. 2007. Inverse problem of unsteady conjugated forced
convection in parallel plate channels. International Journal of Heat and Mass
Transfer, aout 2008, vol.51, p. 993-1002.

110
[25]. Pujos, C. et al. 2007. Influence des incertitudes paramétriques sur l’estimation d’un
modèle rhéologique par inversion de mesures de débit et de températures. 18ème
Congrès Français de Mécanique, Grenoble (France), 27-31 aout 2007. 4 p.
[26]. Garnier, P. 1996. Détermination des caractéristiques hydrodynamique de sols
déformables par la méthode inverse. Thèse de doctorat : université Nancy 1. 151p.
[27]. Korichi, A. et al.2005. Transfert convectif lors d’un écoulement oscillatoire en
présence d’un barreau cylindrique. 17ème Congrès Français de Mécanique,
Troyes(France), septembre 2005.6p.
[28]. Omara, A., Abboudi, S.2007.Effet de la conduction axiale sur le transfert de chaleur
conjugue par convection mixte défavorable. 13èmes Journées Internationales de
Thermique, Albi(France), 28- 30 Aout 2007, 5p.
[29]. Buchlin, J.M. 1998.Natural and forced convective heat transfer on slender cylinders.
Revue générale de Thermique, Sept 1998, vol.37, n°8. p.653-660.
[30]. Maillet, D., Degiovanni, A. 1989. Méthode analytique de conduction inverse
appliquée à la mesure du coefficient de transfert local sur un cylindre en convection
forcée. Revue de physique appliqué, juillet 1989, vol.24, n°7. p. 741-759.
[31]. Tamene, Y. et al. 2009. Simulation des transferts thermiques transitoire à travers un
mur multicouche soumis à des conditions de flux solaire et de convection. Revue des
Energies Renouvelables, mars 2009, Vol. 12, n°1. p. 117 – 124.
[32]. Young, T.J., Vafai, K.1998. Convective flow and heat transfer in a channel
containing multiple heated obstacles, International Journal of Heat and Mass
Transfer, vol.41. p. 3279-3298.
[33]. Huang, C.H., Shih, W.Y. 1999. An inverse problem in estimating interfacial cracks
in bimaterials by boundary element technique, Int. J. for Num. Methods in
Engineering, Vol.45. p.1547-1567.
[34]. Abou Khachfe, R. 2000. Résolution numérique de problèmes inverses 2D non
linéaires de conduction de la chaleur par la méthode des éléments finis et
l'algorithme du gradient Conjugué. Thèse de Doctorat : Université de Nantes, Ecole
polytechnique de Nantes.
[35]. Bhowmik, H., Tou, K.W.(2005). An experimental study of transient heat transfer
from discrete heat sources in water cooled vertical rectangular channel, Journal of
Electronic Packaging, vol.127.p.193-199.

111
[36]. Fu, W.S., Tong, B.H.(2004). Numerical investigation of heat transfer characteristics
of The heated blocks in the channel with transversally oscillating cylinder,
International Journal of Heat Transfer, Vol.47. p. 341-351.
[37]. Huang, C.H., Ozisik, M. N. 1992. Inverse problem of determining the unknown
strength of an internal plane heat source, Journal of the Franklin Institute, vol.329,
n°4, p. 751-764.
[38]. Silva Neto, A.J., Özisik, M.N. 1992. Two-dimensional inverse heat conduction
problem of estimating the time-varying strength of a line heat source, Journal of
Applied Physics, vol.71, p. 5357-5362.
[39]. Silva Neto, A.J., Özisik, M.N. 1993.Inverse problem of simultaneously estimating
the Timewise-varying strengths of two plane heat sources, Journal of Applied
Physics, vol.73, n°5, p. 2132-2137.
[40]. Silva Neto, A.J., Özisik, M.N. 1993. Simultaneous Estimation of Location and
Timewise Varying Strength of a Plane Heat Source, Numerical Heat Transfer, Part
A, vol.24, p. 467-477.
[41]. Alifanov, O.M., Artyukhin, E. A. 1975. Regularized numerical solution of nonlinear
inverse heat-conduction problem, Journal of Engineering Physics, vol. 29, p. 934-
938.
[42]. Alifanov, O.M. Inverse Heat Transfer Problems, Springer-Verlag, Berlin, 1994.
[43]. Ecoto, F. 1986.Initiation à la Recherche Opérationnelle. Paris : édition Ellipses.
[44]. Plevris, V., Papadrakakis, M. 2011. A hybrid particle swarm gradient algorithm for
global structural optimization, Computer Aided Civil and Infrastructure Engineering,
vol.26, p.48-68.
[45]. Cea, J. 1968. Les méthodes de descente dans la théorie de l’optimisation, Revue
française d’informatique et de la recherche opérationnelle, série rouge, tome2, n°3,
p.79-101.
[46]. Laurent, G. 2010. Optimisation sans contrainte de fonctions continues non
linéaires(notes de cours).25p.
[47]. Mottelet, S. 2003. Recherche opérationnelle : Optimisation non linéaire (notes de
cours) : université de technologie de Compiègne. 111p.
[48]. Koepfler, G. 2010. Optimisation et algorithme : université Paris Descartes. 50p.

112
[49]. Wan, Z., Yang, Z., Wang, Y. 2010. New spectral PRP conjugate gradient method for
unconstrained optimization, Applied Mathematics letters, aout 2010, vol.24, p.16-22.
[50]. Asch, M. 2008. Optimisation, régression et problèmes inverse. Amiens. 79p.
[51]. Danaila, I. Hecht, F. Pironneau, O.2003.simulation numérique en C++.InDanaila, I.
Algorithmes et techniques avancées de programmation. Paris : édition Dunod. p. 1-
4.
[52]. Diallo, T. 2006. Etude et illustration de méthodes itératives d’optimisation non
linéaire. Projet de master : Ecole Polytechnique Fédérale de Lausanne. 60p.
[53]. Scheid, J.F. 2007. Méthode numérique pour la dynamique des fluides (notes de
cours) : université H.POINCARE, NancyI.
[54]. Quarteroni, A., Sacco, R., Saleri, F. 2007. Méthodes numériques : Algorithmes,
Analyse et applications. Milano: Springer-Verlag Italie.540p.
[55]. Tikhonov, A. and Arsenin, V. (1977). Solutions of Ill-Posed Problems. V.H. Winston
and Sons.
[56]. Allaire, G. Analyse numérique et optimisation. Paris : Les éditions de l’école
polytechnique. 459p
[57]. Ionut, D., Pascal, J., Sidi Mahmoud, K., Marie, P. 2005. Introduction au calcul
scientifique par la pratique .Paris : édition Dunod.306p.
[58]. Anderson, D.A., Tannehil, J.C., Pletcher, R.H. 1984.Series in computational methods
in mechanics and thermal sciences: Computational fluid mechanics and heat
transfer. Washington: McGraw-Hill book company.599p.
[59]. PATANKAR,S.V. 1980. Series in computational and physical processes in
mechanics and thermal sciences: Numerical heat transfer and fluid flow. USA:
Hemisphere Publishing Corporation-Taylor & Francis.197p.
[60]. Goncalves, E. septembre 2005. Méthodes, analyse et calculs numériques (notes de
cours) : Institut Polytechnique de Grenoble. 99p.
[61]. Liu, J.K., Zou, L.M., Song, X.Q. 2011. Global converging of a nonlinear conjugate
gradient method, Mathematical problems in engineering, Hindawi Publishing
Corporation, Chine, 22p.
[62]. Dorfman, A., Renner, Z. 2009. Conjugate problems in convective heat transfer:
Review Mathematical problems in engineering, Hindawi Publishing Corporation,
Michigan (USA), 27p.
[63]. Zhang, J., Xiao, Y., Wei, Z. 2009. Nonlinear conjugated gradient methods with
sufficient descent condition for large-scale unconstrained optimization,

113
Mathematical problems in engineering, Hindawi Publishing Corporation, Chine,
16p.
[64]. Alifanov OM. Inverse heat transfer problem. Springer-Verlag; 1994.p.172-178.
[65]. Guide de présentation des normes bibliographiques. Mars 2005- Centre
international de hautes études agronomiques méditerranéen. Décembre1987-.
Montpellier : Institut agronomique méditerranéen. Document en français.
D’après la norme Z 44-005 de décembre 1987 : Documentation : Références
bibliographiques : contenu, forme et structure (ISO 690)
Résumé
Dans cette étude, on propose d’estimer le flux de chaleur à travers la paroi externe d'une
conduite par la méthode inverse, impliquant l’échange de chaleur par convection forcée. Le
système est constitué d’un fluide en écoulement dans une conduite, une paroi solide et un flux
de chaleur appliqué sur la paroi externe de la conduite. C’est un problème inverse des
transferts thermiques convection/conduction. La méthode du gradient conjugué utilisée
consiste à transformer l'équation d'énergie (dit problème direct), en une équation adjointe et
une équation de sensibilité (équation de variation) et résoudre ces trois équations
itérativement pour minimiser l'erreur de l'estimation.
Mots clés : Différences finies, convection forcée, Méthode inverse, Méthode du gradient
conjugué.
Abstract
The main objective of this study is to estimate the heat flux through the outer wall of a pipe
using the inverse method, involving the exchange of forced convection. The system consists
of a fluid flowing in a pipe, solid wall and a heat flux applied to the outer wall of the pipe. It
is an inverse problem of heat transfer convection / conduction. The conjugate gradient method
is used to transform the energy equation (called direct problem) into adjoin equation and
sensitivity equation (equation of variation) and solve these three equations iteratively to
minimize the error of the estimation.
Key words: Finite difference, forced convection, Inverse method, Conjugate gradient
method.
ملخص
األنموذج العكسيالخارجي ألنبوب بواسطة السطح على مستوى يتدفق الحرارالتقدير هو هدف الرئيسي من هذا البحثال
على الجدار مطبق ي، وجدار وتدفق حرارنبوبمن سائل يتدفق في أ المترافق. ويتكون النظام يحرارالتبادل بال المرتبط
مترافقة معادلة إلىالخارجي لألنبوب. يتم استخدام أسلوب التدرج المتقارن لتحويل معادلة الطاقة )تسمى مشكلة مباشرة(
.تقديرالخطأ من تقليل للبطريقة تكرارية معادلة تباين وحل هذه المعادالت الثالث و
: لمفتاحكلمات ا
ج العكسي، طريقة التدرج المتقارناألنموذالفوارق المنتهية، الحمل الحراري القسري ،