Embed Size (px)
Citation preview
Analyse statique d’une pièce
Contrainte de Von Mises sur une chape taillée dans la masse
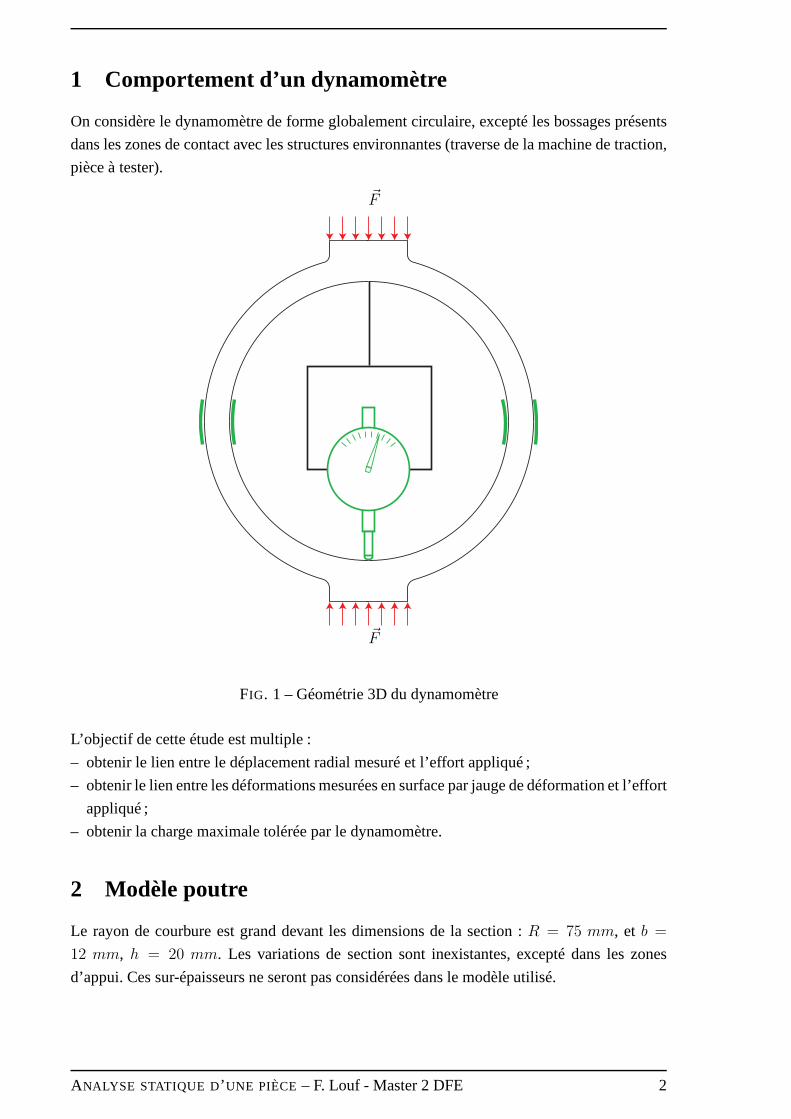
1 Comportement d’un dynamomètre
On considère le dynamomètre de forme globalement circulaire, excepté les bossages présents
dans les zones de contact avec les structures environnantes(traverse de la machine de traction,
pièce à tester).
~F
~F
FIG. 1 – Géométrie 3D du dynamomètre
L’objectif de cette étude est multiple :
– obtenir le lien entre le déplacement radial mesuré et l’effort appliqué ;
– obtenir le lien entre les déformations mesurées en surfacepar jauge de déformation et l’effort
appliqué ;
– obtenir la charge maximale tolérée par le dynamomètre.
2 Modèle poutre
Le rayon de courbure est grand devant les dimensions de la section : R = 75 mm, et b =
12 mm, h = 20 mm. Les variations de section sont inexistantes, excepté dansles zones
d’appui. Ces sur-épaisseurs ne seront pas considérées dansle modèle utilisé.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 2
2.1 Symétries
2.1 Symétries
Le chargement correspond à une compression diamétrale du dynamomètre. Il y a donc symétrie
du chargement par rapport aux deux plans(O,~x, ~z) et (O, ~y, ~z).
Par ailleurs, la géométrie issue de la modélisation, tout comme la structure réelle, est elle aussi
symétrique par rapport à ces deux plans.
Globalement, le problème de mécanique présente donc deux plans de symétrie que l’on ex-
ploitera par la suite.
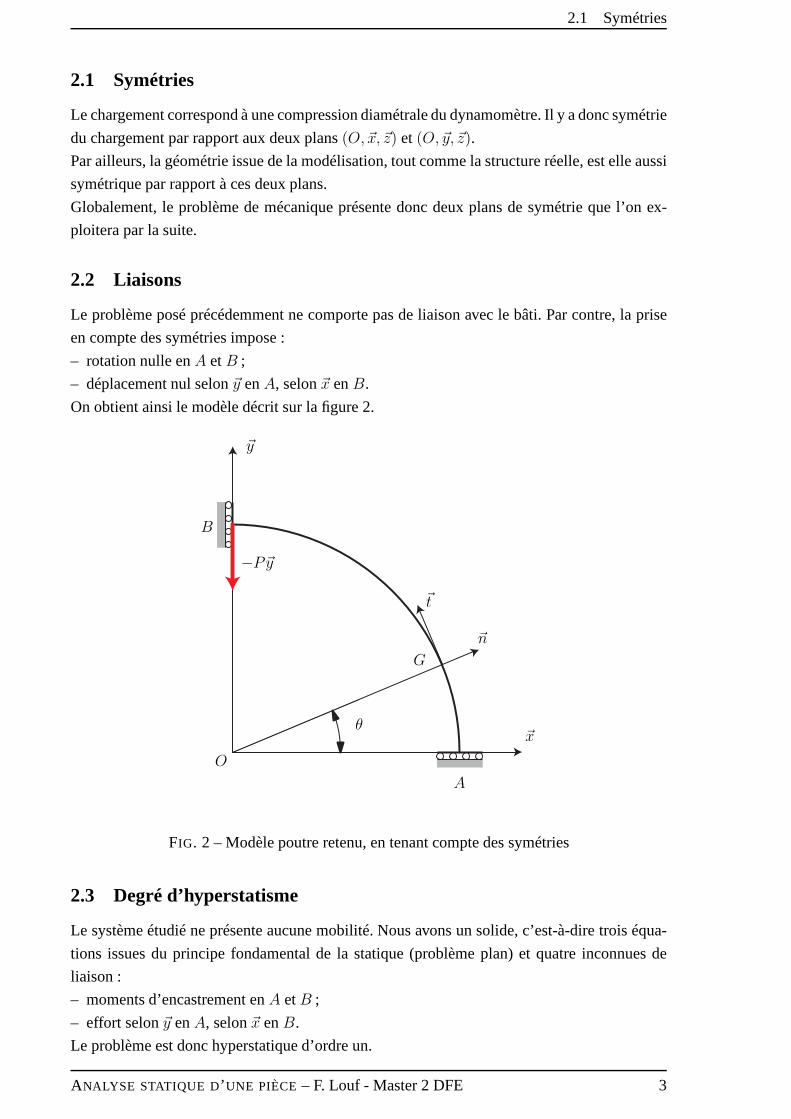
2.2 Liaisons
Le problème posé précédemment ne comporte pas de liaison avec le bâti. Par contre, la prise
en compte des symétries impose :
– rotation nulle enA etB ;
– déplacement nul selon~y enA, selon~x enB.
On obtient ainsi le modèle décrit sur la figure 2.
A
B
O
G
~x
~y
−P~y
~t
~n
θ
FIG. 2 – Modèle poutre retenu, en tenant compte des symétries
2.3 Degré d’hyperstatisme
Le système étudié ne présente aucune mobilité. Nous avons unsolide, c’est-à-dire trois équa-
tions issues du principe fondamental de la statique (problème plan) et quatre inconnues de
liaison :
– moments d’encastrement enA etB ;
– effort selon~y enA, selon~x enB.
Le problème est donc hyperstatique d’ordre un.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 3
2.4 Résolution
2.4 Résolution
La résolution d’un problème hyperstatique passe par l’utilisation, par exemple, de théorèmes
énergétiques.
2.4.1 Equations de la statique
L’isolement du quart de la structure, et l’application du principe fondamental de la statique
donnent trois équations :
XB = 0 (1)
YA − F = 0 (2)
MA + MB + RF = 0 (3)
2.4.2 Efforts de cohésion
Le torseur des efforts de cohésion en un pointG(θ) de la poutre est défini comme l’opposé
du torseur des efforts extérieurs appliqué sur la partieP− de la poutre définie par le secteur
angulaire[0, θ]. En isolant la partieP− de la poutre, on obtient pour le torseur des efforts
extérieurs :
{
TExt→P−
}
=
0 ×
F ×
× MA
(A,(~x,~y,~z))
=
0 ×
F ×
× MA + FR(1 − cos(θ))
(G,(~x,~y,~z))
(4)
Ainsi le torseur des efforts de cohésion est :
{
TCoh
}
= −
0 ×
F ×
× MA + FR(1 − cos(θ))
(G,(~x,~y,~z))
(5)
soit dans la base locale de la poutre, de manière à voir quelles sont les sollicitations :
{
TCoh
}
=
N(θ) ×
Ty(θ) ×
× Mfz(θ)
(G,(~t,~n,~b))
= −
F cos(θ) ×
F sin(θ) ×
× MA + FR(1 − cos(θ))
(G,(~t,~n,~b))
(6)
2.4.3 Energie de déformation
L’énergie de déformation totale est, en négligeant l’énergie de cisaillement devant les autres :
Ed =1
2
∫ L
0
M2fz
EIgz
+N2
ESds (7)
2.4.4 Obtention de l’équation manquante
Le théorème de l’énergie complémentaire dit que la solutionen effort du problème réalise le
minimum de l’énergie complémentaire sur l’ensemble des champs statiquement admissibles.
On rappelle que l’énergie complémentaire est définie par :
Ec = Ed − W (8)
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 4
2.4 Résolution
oùW représente le travail des efforts calculés dans les déplacement imposés.
Il est donc impératif d’écrire l’énergie de déformation en tenant compte de l’équilibre statique.
Pour cela, on choisit une inconnue hyperstatique (MA par exemple), et on écrit tout en fonction
de cette inconnue et des données du problème :
Ed =1
2
∫ L
0
(MA + FR(1 − cos(θ)))2
EIgz
+(F cos(θ))2
ESds (9)
Dans notre cas,W = 0 puisque tous les déplacements et rotations imposés sont nuls. Ainsi, le
théorème de l’énergie complémentaire conduit à (cf théorème de Ménabréa) :
dEc
dMA
=dEd
dMA
= 0 (10)
soit encore, avecds = Rdθ :
∫ π
2
0
R(MA + FR(1 − cos(θ)))
EIgz
dθ = 0 (11)
Cette dernière équation conduit à :
MA
π
2+ FR(
π
2− 1) = 0 (12)
Finalement, le moment d’encastrement enA est :
MA =2 − π
πFR (13)
et donc :
MB = −2
πFR (14)
Le moment fléchissant est donc connu :
Mfz(θ) = −FR
(
2
π− cos(θ)
)
(15)
2.4.5 Contrainte normale en surface
Sur la peau intérieure, la contrainte normale est donnée par:
σn(θ, R − h/2) =N(θ)
S+
Mfz
Igz
h
2(16)
= −F
Scos(θ) −
6FR
bh2
(
2
π− cos(θ)
)
(17)
Sur la peau extérieure, la contrainte normale est donnée par:
σn(θ, R + h/2) =N(θ)
S−
Mfz
Igz
h
2(18)
= −F
Scos(θ) +
6FR
bh2
(
2
π− cos(θ)
)
(19)
Les déformations aux "points" de mesure (θ = 0) peuvent alors être déduites de la contrainte
par la loi de Hooke.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 5

2.4 Résolution
2.4.6 Obtention de la raideur de l’anneau
L’utilisation du théorème de Castigliano permet de trouverle lien entre l’effort−F~y appliqué
enB et le déplacement−δ~y qui en résulte :
dEd
dF= δ (20)
Il suffit de calculer :
dEd
dF=
1
2R
∫ π
2
0
d
dF
[
M2fz
EIgz
]
+d
dF
[
N2
ES
]
dθ (21)
= R
∫ π
2
0
MA + FR(1 − cos(θ))
EIgz
(
R2 − π
π+ R(1 − cos(θ))
)
+F (cos(θ))2
ESdθ (22)
= R
∫ π
2
0
MA + FR(1 − cos(θ))
EIgz
R
(
2
π− cos(θ)
)
+F (cos(θ))2
ESdθ (23)
= R
∫ π
2
0
2
πR
MA + FR
EIgz
− R(MA + (1 + 2
π)FR) cos(θ)
EIgz
+
(
FR2
EIgz
+F
ES
)
(cos(θ))2dθ
(24)
= R2 MA + FR
EIgz
− R2 (MA + (1 + 2π)FR)
EIgz
+
(
FR3
EIgz
+FR
ES
)
π
4(25)
= R2 2
π
FR
EIgz
− R2 4
π
FR
EIgz
+
(
FR3
EIgz
+FR
ES
)
π
4(26)
Finalement :
δ = F
(
π
4−
2
π
)
R3
EIgz
+ Fπ
4
R
ES(27)
La raideur vaut alors :
k =1
(
π4− 2
π
)
R3
EIgz
+ π4
RES
(28)
La raideur ainsi calculée est bien celle de l’anneau dynamométrique complet :
– le déplacement radial total vaut2δ ;
– l’effort appliqué sur l’anneau complet vaut2F .
On remarquera que le second terme du déplacement est très faible par rapport au premier. La
souplesse de la structure est essentiellement due à la flexion, et très peu à la compression. La
correction apportée sur le déplacement est de l’ordre de1%.
En effet la différence relative des déplacements calculés avec et sans prise en compte de la
compression est :
π2
π2 − 8
Igz
R2S=
π2
π2 − 8
bh3
12R2bh=
π2
π2 − 8
h2
12R2= 0.44
h2
R2(29)
A partir du moment où on fait l’hypothèse d’un rayon de courbure R important devant les
dimensions de la section (h notamment), la compression peut être négligée.
2.4.7 Applications numériques
Les caractéristiques dimensionnelles et matériau de l’anneau dynamométrique sont :
– Rayon intérieur :Rint = 69 mm ;
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 6
– Rayon extérieur :Rext = 81 mm ;
– Rayon moyen :R = (Rint + Rext)/2 ;
– Epaisseur selon un rayon :h = Rext − Rint ;
– Epaisseur selon~z : b = 20 mm ;
– Module de Young :E = 210000 MPa.
La raideur calculée avec ces éléments est :
k = 9529 N.mm−1 (30)
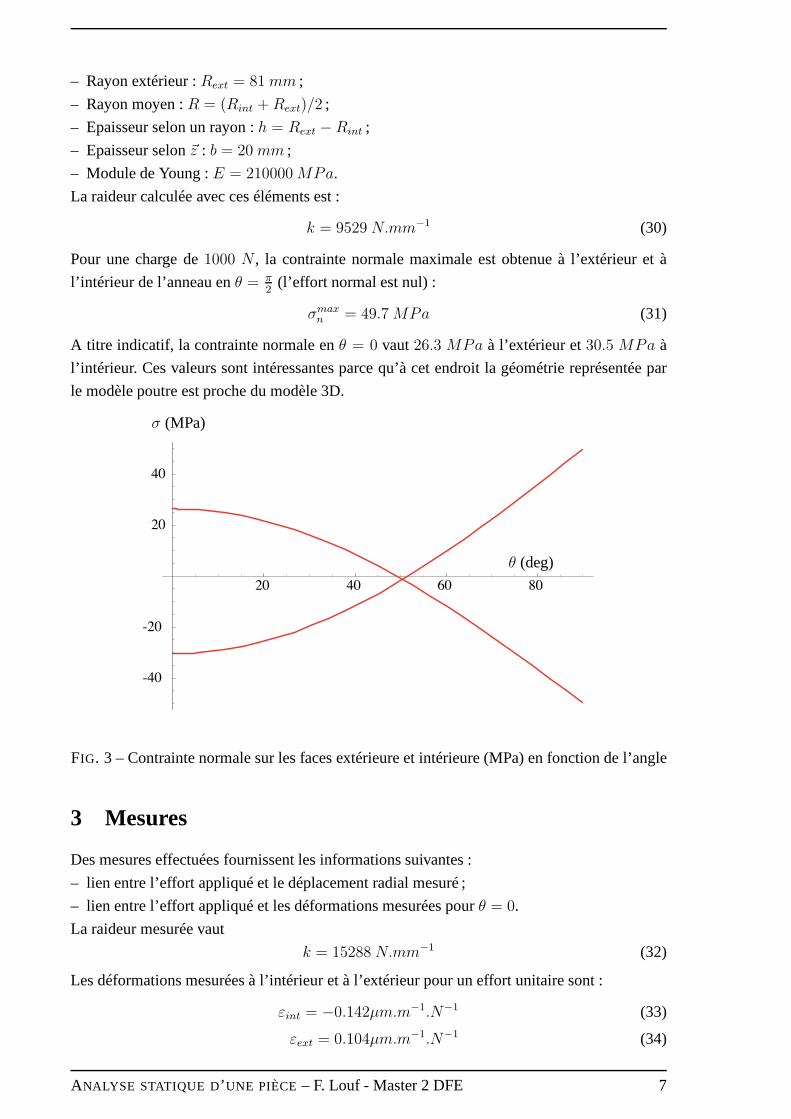
Pour une charge de1000 N , la contrainte normale maximale est obtenue à l’extérieur et à
l’intérieur de l’anneau enθ = π2
(l’effort normal est nul) :
σmaxn = 49.7 MPa (31)
A titre indicatif, la contrainte normale enθ = 0 vaut26.3 MPa à l’extérieur et30.5 MPa à
l’intérieur. Ces valeurs sont intéressantes parce qu’à cetendroit la géométrie représentée par
le modèle poutre est proche du modèle 3D.
20 40 60 80
-40
-20
20
40
σ (MPa)
θ (deg)
FIG. 3 – Contrainte normale sur les faces extérieure et intérieure (MPa) en fonction de l’angle
3 Mesures
Des mesures effectuées fournissent les informations suivantes :
– lien entre l’effort appliqué et le déplacement radial mesuré ;
– lien entre l’effort appliqué et les déformations mesuréespourθ = 0.
La raideur mesurée vaut
k = 15288 N.mm−1 (32)
Les déformations mesurées à l’intérieur et à l’extérieur pour un effort unitaire sont :
εint = −0.142µm.m−1.N−1 (33)
εext = 0.104µm.m−1.N−1 (34)
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 7
Un rapide calcul permet d’estimer la contrainte normale à l’extérieur et à l’intérieur de l’anneau
dynamométrique, pourθ = 0˚. On obtient :
σextn = 23, 1 Mpa et σint
n = 31, 3 Mpa
4 Modèle éléments finis
4.1 Géométrie 3D
La géométrie 3D est déjà créée et peut être récupérée dans le fichier Dynamometre.CATPart
mais ne prend pas en compte les symétries. Il faut couper le volume par les trois plans de
symétrie. Pour faire cela, double-cliquer sur l’icônecoupe(afin de maintenir celle-ci active) et
sélectionner successivement les trois plans de symétrie. Une fois que cela est fait, cliquer sur
annuler pour fermer la fenêtre de l’outil.
Remarque. – On fera en sorte de conserver le volume dont les points matériels sont de coor-
donnéesx, y et z positives. Pour modifier la zone conservée après coupe, on peut cliquer sur
la flèche orange apparaissant sur le volume lors de l’utilisation de l’outil.
Maintenant que la géométrie est adaptée au modèle que l’on souhaite traiter, on peut lancer
l’atelier d’analyse éléments finis :Analyse et simulation/Generative Structural Analysis. A
l’ouverture de l’atelier une fenêtre propose de choisir le type d’analyse à effectuer : sélection-
nerAnalyse statique.
4.2 Maillage
Le maillage tétraédrique est pré-défini dès que l’on entre dans l’atelier. La taille des éléments
est calculée en fonction de la géométrie (dimension, détails, ...). Le maillage sera mis à jour lors
du calcul. Pour le visualiser dès maintenant, cliquer droitsur le nœudMaillage, et sélectionner
visualiser le maillage. Une fois que cela est fait, désactiver l’image en cliquant droit sur le
maillage dans l’arbre.
4.3 Définition de groupes
Afin de visualiser aisément des quantités mécaniques (déplacements, contraintes) dans des
zones particulières telles que des petites surfaces, des arêtes, des points, et de les exporter, il
est intéressant d’utiliser la notion de groupes. Un groupe peut être vu comme une interface
entre une géométrie (sous-jacente au maillage ou pas) et lesnoeuds d’un maillage.
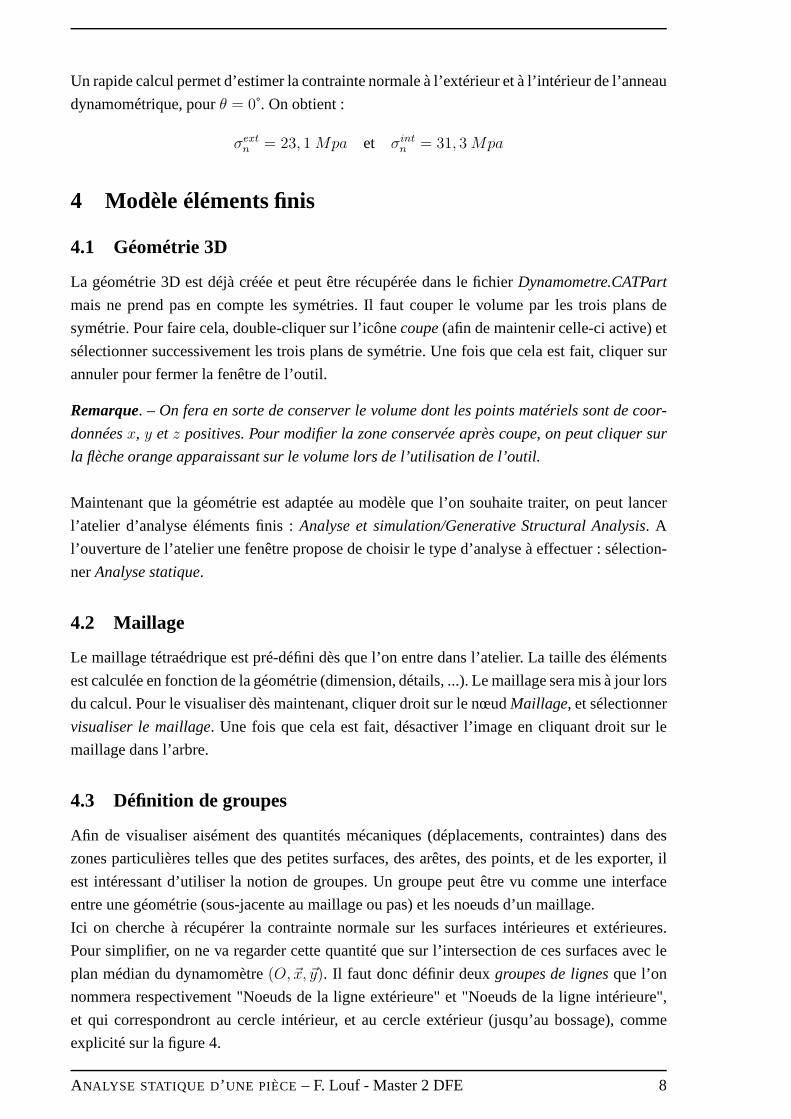
Ici on cherche à récupérer la contrainte normale sur les surfaces intérieures et extérieures.
Pour simplifier, on ne va regarder cette quantité que sur l’intersection de ces surfaces avec le
plan médian du dynamomètre(O,~x, ~y). Il faut donc définir deuxgroupes de lignesque l’on
nommera respectivement "Noeuds de la ligne extérieure" et "Noeuds de la ligne intérieure",
et qui correspondront au cercle intérieur, et au cercle extérieur (jusqu’au bossage), comme
explicité sur la figure 4.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 8
4.4 Conditions aux limites
(a) Ligne intérieure (b) Ligne extérieure
FIG. 4 – Lignes intérieures et extérieures à sélectionner pour définir les groupes
Une fois ces éléments définis, il est possible de visualiser les entités qui y sont rattachées et
notamment les nœuds ; pour cela il suffit de cliquer droit sur un groupe (dans l’arbre) et de
choisir Analyse du groupe. En cochant la caseNoeuds, les nœuds associés au groupe sont
tracés.
4.4 Conditions aux limites
Les conditions aux limites sont ici issues uniquement des trois conditions de symétrie. Il s’agit
donc d’appliquer un déplacement nul selon les normales des plans de symétrie, sur les plans
de symétrie. Une façon simple d’appliquer cette condition est d’utiliser l’outil Glissement Sur-
faciqueen sélectionnant les faces concernées. Une autre méthode consiste à utiliser l’outil
Fixations définies par l’utilsateur. Il faut alors cocher les degrés de liberté que l’on souhaite
bloquer (et pas l’inverse).
4.5 Prise en compte de la traverse
En pratique, si l’on considère que la traverse qui impose l’effort sur le dynamomètre est très
rigide, on peut imposer que les points du plan du bossage restent dans un plan après déforma-
tion. Pour cela, on peut imposer que la face d’application del’effort demeure rigide pendant le
chargement à l’aide de l’outilPièce virtuelle rigidedans lequel on aura sélectionné la face en
question.
Remarque. – On aurait pu contourner ce problème en imposant le déplacement normal au
bossage et en mesurant la réaction dans ce déplacement imposé.
4.6 Chargement
Le premier chargement considéré est une pression sur la faceplane d’appui. On choisira une
pression telle que la résultante soit égale à1000 N qui correspond à la charge pour laquelle des
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 9
4.7 Premier calcul
mesures ont été réalisées.. On peut naturellement calculerla pression équivalente à la main,
mais une méthode plus élégante est proposée ci-dessous.
Un paramètre associé à l’effort doit tout d’abord être créé.Pour cela, dans la fenêtreOu-
tils/Formules, créer un paramètre de type force :
– choisir le type du paramètre (Force) ;
– créer un nouveau paramètre ;
– le renommer sous le nomEffort ;
– lui donner la valeur 1000 (N par défaut).
Cliquer sur l’icône associée à l’outilPression: une fenêtre s’ouvre.
– Sélectionner la face sur laquelle on souhaite appliquer lapression ;
– Dans la ligne précisant la valeur de la pression, cliquer droit, et dans le menu déroulant,
sélectionnerEditer formule;
– La fenêtre qui s’ouvre permet de définir la pression en fonction de paramètres déjà définis :
la taille de la face supportant le chargement et l’effort appliqué ;
– dans les paramètres renommés, double cliquer surEffort ; le paramètre est inséré dans la
ligne de formule ;
– insérer à la suite le signe/ dans la ligne de formule ;
– pour calculer l’aire de la face, il suffit de faire le produitdes paramètres de longueur et de
largeur du bossage ;
– entourer finalement ce produit de parenthèses et fermet la fenêtre.
La pression qui apparaît alors est calculée automatiquement en fonction de la géométrie et du
paramètre d’effort que l’on pourra modifier par la suite. Fermer la fenêtre associée à l’outil
Pression.
4.7 Premier calcul
Pour lancer le calcul, cliquer sur l’icôneCalcul.
4.8 Extraction des contraintes normales
Cliquer droit sur l’objetsolution statiquede l’arbre, et dans le menu contextuel, sélection-
ner Génération d’images. Choisir dans la liste proposée de tracer le tenseur des contraintes,
par composante, aux noeuds. L’image est créée et insérée dans l’arbre sous le nœudSolution
statique.
Il faut maintenant définir quelle contrainte on souhaite tracer, et dans quel repère. Pour cela,
éditer l’image créée (double clique), et cliquer surPluspour avoir accès au choix des compo-
santes et du repère. Préciser que le repère choisi est implicite : cela permet de travailler dans
un repère cylindrique bien adapté à la géométrie. On peut éventuellement tracer localement ce
repère pour vérifier qu’il correspond à ce que l’on souhaite.Dans ce repère, la composante qui
nous intéresse estσθθ c’est à direC22 pour le logiciel.
Dans l’onglet supérieurSélection, choisir de tracer cette quantité uniquement sur l’un des
groupes (lignes) créés précédemment.
Il est alors simple d’exporter les valeurs tracées dans un fichier texte en cliquant droit sur
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 10
4.9 Vérification de l’hypothèse d’Euler Bernoulli
l’image dans l’arbre et en sélectionnantExporter les résultats. Importer le fichier texte dans
Excel, et ordonner correctement les valeurs en allant du plan (~x, ~z) au plan(~y, ~z) (il faut
passer en coordonnées cylindrique). Insérer ensuite ces valeurs dans le fichier Excel fourni et
comparer les contraintes obtenues à celles du modèle poutreet aux valeurs locales issues des
mesures.
Répéter cette opération pour l’autre groupe créé, et commenter la qualité des résultats obtenus.
Remarque. – Lorsque l’on souhaite tracer un champ de contraintes on a toujours le choix
entre des contraintes aux noeuds des éléments ou au noeuds. Cela veut dire que l’on peut, soit
tracer les contraintes directement issues du calcul éléments finis, c’est à dire aux points de
Gauss, soit interpoler ces quantités sur les fonctions de formes éléments finis. Cette deuxième
solution est impérative ici pour exporter la contrainte surune arête car celle-ci ne comporte
pas de point de Gauss.
4.9 Vérification de l’hypothèse d’Euler Bernoulli
Le modèle analytique a été réalisé avec l’hypothèse que les sections droites restent perpendi-
culaires à la ligne moyenne après déformation. On peut vérifier ce point.
Dans la pièce, créer unSet géométriqueet construire un plan incliné de45˚ par rapport au plan
(~x, ~z). Réaliser, dans l’atelierGenerative Shape DesignuneIntersectionde la structure par ce
plan. Remplir le contour obtenu.
Dans l’atelier d’analyse éléments finis, créer ungroupe de surfaces par proximitébasé sur
cette section droite. Ensuite, tracer le résultat en déplacement, dans le repère cylindrique, pour
visualiser le champ de déplacementur sur cette section. Exporter ces résultats dans Excel et
conclure quant à la validité de l’hypothèse cinématique.
4.10 Etude de convergence
Les quantités d’intérêt considérées pour cette étude de convergence sont :
– la contrainte normale maximale ;
– le déplacement radial dans la zone de chargement ;
– la raideur du dynamomètre.
Pour faire cette étude il suffit de diminuer progressivementet uniformément la taille du maillage
imposée au départ.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 11
5 Etude d’un treillis rigide : modélisation poutre
12
133.33
400
60°
60
°60
°
4
(B2) (B1)
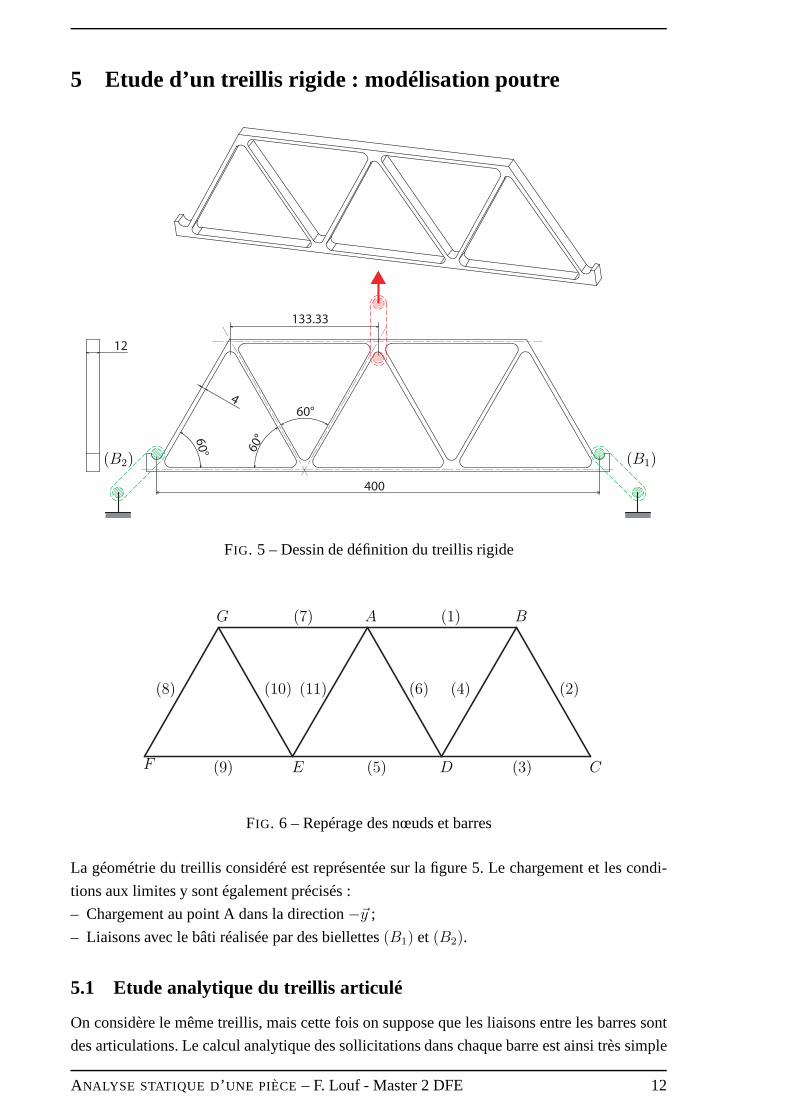
FIG. 5 – Dessin de définition du treillis rigide
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10) (11)
A B
CDEF
G
FIG. 6 – Repérage des nœuds et barres
La géométrie du treillis considéré est représentée sur la figure 5. Le chargement et les condi-
tions aux limites y sont également précisés :
– Chargement au point A dans la direction−~y ;
– Liaisons avec le bâti réalisée par des biellettes(B1) et (B2).
5.1 Etude analytique du treillis articulé
On considère le même treillis, mais cette fois on suppose queles liaisons entre les barres sont
des articulations. Le calcul analytique des sollicitations dans chaque barre est ainsi très simple
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 12

5.1 Etude analytique du treillis articulé
à réaliser puisque le problème est par ailleurs isostatique.
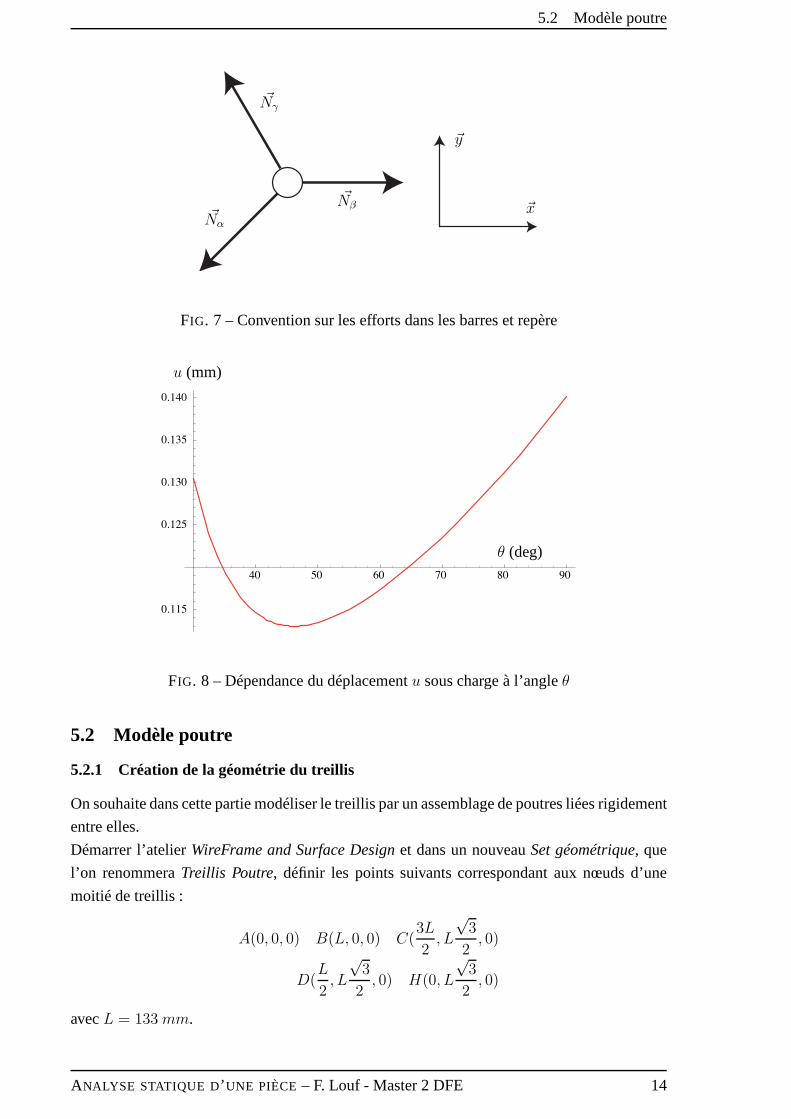
On choisit la convention suivante : les efforts des barres sur un nœud sont dirigés du centre de
ce nœud vers l’extérieur, comme indiqué sur la figure 7.
Si l’effort obtenu après résolution est positif, la barre sera donc sollicitée en traction et inver-
sement. On noteNα l’effort dans la barre(α). La quantitéN0 désigne l’effort normal dans une
des biellettes. Enfin, on noteθ l’angle que font les biellettes avec l’axe longitudinal du treillis.
– L’équilibre du nœud A donne immédiatement :
N6 = F1√
3
– L’équilibre du nœud D donne ensuite :
N4 = −F1√
3et N3 − N5 = F
1√
3
– Ce qui, combiné avec l’équilibre du nœud B donne :
N1 = F1√
3et N2 = F
1√
3
– Enfin, l’équilibre du nœud C donne :
N0 = F1
2 sin(θ)et N3 = F
1
2 tan(θ)− F
1
2√
3
– D’où finalement :
N5 = F1
2 tan(θ)− F
3
2√
3
Le calcul du déplacementu dans la direction de la chargeF peut être obtenu en appliquant le
théorème de Castigliano et en supposant par exemple, les biellettes infiniment rigides :
∂Ed
∂F= u
oùEd désigne l’énergie de déformation donnée par :
Ed =1
2
11∑
i=1
Li
N2i
ES
On obtient (seule la barre(5) n’est pas présente deux fois) :
Ed =L
2ESF 2
[
21
3+ 2
1
3+ 2
(
1
2 tan(θ)−
1
2√
3
)2
+ 21
3+
(
1
2 tan(θ)−
3
2√
3
)2
+ 21
3
]
Ed =L
2ESF 243 − 10
√3 cot(θ) + 9 cot2(θ)
12
Finalement, le déplacementu vaut donc :
u = F43 − 10
√3 cot(θ) + 9 cot2(θ)
12
L
ES
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 13
5.2 Modèle poutre
~Nα
~Nβ
~Nγ
~x
~y
FIG. 7 – Convention sur les efforts dans les barres et repère
40 50 60 70 80 90
0.115
0.125
0.130
0.135
0.140
u (mm)
θ (deg)
FIG. 8 – Dépendance du déplacementu sous charge à l’angleθ
5.2 Modèle poutre
5.2.1 Création de la géométrie du treillis
On souhaite dans cette partie modéliser le treillis par un assemblage de poutres liées rigidement
entre elles.
Démarrer l’atelierWireFrame and Surface Designet dans un nouveauSet géométrique, que
l’on renommeraTreillis Poutre, définir les points suivants correspondant aux nœuds d’une
moitié de treillis :
A(0, 0, 0) B(L, 0, 0) C(3L
2, L
√3
2, 0)
D(L
2, L
√3
2, 0) H(0, L
√3
2, 0)
avecL = 133 mm.
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 14
5.2 Modèle poutre
Remarque. – On pourra définir cette longueur comme un paramètre et y faireappel dans la
définition des points. De même, on pourra définir les dimensions de la section de chaque barre
(e × h = 4mm × 12mm).
Relier dans l’ordre suivant les points par des droites renomméesBarre 1, Barre 2, etc :
– Barre 1 : du point A au point B ;
– Barre 2 : du point B au point C ;
– Barre 3 : du point C au point D ;
– Barre 4 : du point D au point B ;
– Barre 5 : du point D au point H (projeté de E sur le plan de symétrie) ;
– Barre 6 : du point D au point A.
A l’aide de l’outil Joindre, assembler les six droites définies précédemment. Décocherles
casesCheck Manifoldet Check Connexitysous peine d’obtenir un message d’erreur. Renom-
mer cet assemblageTreillisPoutrepar exemple. Appliquer un matériau (Aluminium) à l’objet
TreillisPoutre.
5.2.2 Repères locaux
Afin de définir proprement les conditions aux limites associées aux biellettes dans le calcul
éléments finis, on introduit dans la géométrie un repère, centré sur le point d’appuiC, et dont
l’axe ~x est incliné d’un angleθ par rapport au repère global (dans l’axe de la biellette(B1)).
Pour cela :
– Dans le menuOutil/Formules, créer un nouveau paramètre de typeAngle;
– Insérer un nouveauSet géométrique;
– Créer une droite de typePoint-Direction, d’origine le pointC ; la direction de la droite sera
paramétrée par l’angleθ : pour cela cliquer dans la caseDirection et choisir de définir la
direction par les coordonnées ; imposer une valeur nulle pour la coordonnée sur~z, et pour
les coordonnées sur~x et~y, imposer respectivement via une formule les relations :cos(θ) et
sin(θ) ;
– Imposer une longueur raisonnable de la droite (20 mm par exemple) puis fermer la fenêtre ;
– Insérer unSystème d’axesd’origine le pointC et dont l’axe~X est défini par la droite précé-
demment créée ; fermer la fenêtre ;
– Vérifier que la modification du paramètreθ modifie convenablement l’orientation du repère ;
5.2.3 Lancement du calcul
Lancer maintenant le module d’analyse par éléments finis. Commencer par mailler la structure
à l’aide du menu déroulant de maillage. Sélectionner comme support l’objet TreillisPoutre
dans l’arbre et spécifier ensuite une taille de10 mm pour les éléments.
Définir ensuite les propriétés associées aux poutres. Pour cela, utiliser l’icônePropriété de
poutres. Une fois la fenêtre ouverte :
– cliquer sur la structure ;
– choisir une géométrie d’orientation : il s’agit ici d’orienter le repère local de chaque poutre
(G, ~X, ~Y , ~Z) dont seul~X est défini comme tangent à la ligne moyenne ; le choix du plan
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 15
5.2 Modèle poutre
(~x, ~y) est intéressant car il permet d’orienter l’axe local~Y dans la direction de l’axe global
~z ;
– préciser que la section est rectangulaire (les dimensionssont données sur la figure 5).
Dans le cas d’un treillis spatial une géométrie d’orientation ne peut convenir à toutes les
poutres. Dans ce cas, pour chacune des poutres mal orientées, il faut suivre la démarche sui-
vante :
– cliquer droit sur l’objetPropriétés de poutre(il vient d’être défini) dans l’arbre ;
– dans le menu déroulant, sélectionnerPropriété de poutre locale;
– dans la fenêtre ouverte, cliquer sur la poutre dont on veut modifier les propriétés, préciser
la géométrie d’orientation qui lui est associée, et préciser le type et les dimensions de la
section.
Les liaisons au bâti peuvent être appliquées de la même manière qu’en 3D en sélectionnant
les points extrémités. On utilisera ici lesContraintes avancées. Au point C, on bloquera le
déplacement dans la direction~X du système d’axe précédemment créé.
Imposer enfin un effort de typeForce distribuée, d’intensité500 N sur le nœud adéquat.
Lancer le calcul.
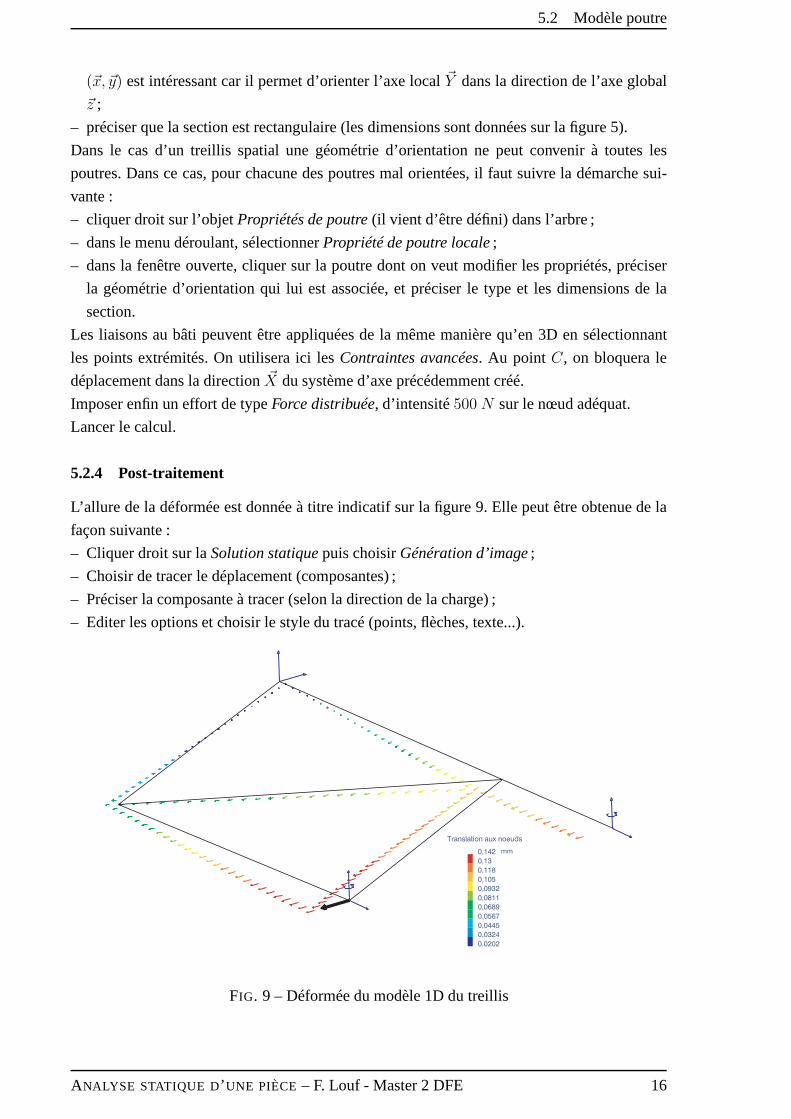
5.2.4 Post-traitement
L’allure de la déformée est donnée à titre indicatif sur la figure 9. Elle peut être obtenue de la
façon suivante :
– Cliquer droit sur laSolution statiquepuis choisirGénération d’image;
– Choisir de tracer le déplacement (composantes) ;
– Préciser la composante à tracer (selon la direction de la charge) ;
– Editer les options et choisir le style du tracé (points, flèches, texte...).
mm
FIG. 9 – Déformée du modèle 1D du treillis
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 16
5.2 Modèle poutre
5.2.5 Comparaison des résultats
Créer un capteur local de type déplacement donnant le déplacement au pointA, notéu, dans
la direction~y et lui associer un paramètre de type longueur notéu dans la suite. Comparer les
résultats obtenus avec la solution analytique. Faire ensuite varier l’angleθ manuellement et
vérifier la cohérence de la variation du déplacement constatée (figure 8).
5.2.6 Utilisation d’une macro
Pour automatiser le calcul de la dépendance du déplacementu à l’angleθ, on peut créer une
macro qui va lancer les multiples calculs les uns après les autres et écrire un fichier texte
contenant deux colonnes :
– l’angleθ courant :
– le déplacementu calculé pour cet angleθ ;
Comme dans les logiciels Excel, ou Word, un premier jet de la macro peut être créé en enre-
gistrant des opérations. Elle sera ensuite modifiée pour insérer une boucle sur le paramètreθ.
Avant tout, afin de voir comment récupérer la valeur d’un paramètre, on va créer un paramètre
de type longueurtoto et lui imposer une valeur quelconque. Pour créer la macro, onsuivra la
démarche suivante :
– Dans le menuOutils/Macros, choisirDémarrer l’enregistrement; donner un nom pertinent
à la macro (par exemple Lien-u-theta.catvbs) et sélectionner le répertoire où elle sera enre-
gistrée ;
– Lancer l’enregistrement ;
– Dans la géométrie, modifier la valeur du paramètre angulaireθ (50˚ par exemple) ;
– Relancer le calcul éléments finis ;
– Double-cliquer sur le paramètretoto dans l’arbre de façon et modifier sa valeur (20 mm par
exemple) ;
– Stopper l’enregistrement de la macro puis éditer celle-ciavec un éditeur quelconque.
Le langage de la macro est à base de Visual Basic, et n’est pas forcément très lisible de prime
abord. Dans les lignes de codes écrites on peut repérer :
– Set parameters1 = part1.Parameterscontient tous les paramètres utilisateurs définis dans la
géométrie ;
– Set parameters2 = analysisManager1.Parameterscontient tous les paramètres utilisateurs
définis dans l’analyse éléments finis ;
– Set angle1 = parameters1.Item("theta")puis angle1.Value = 50.000: c’est par ce moyen
qu’on peut modifier la valeur du paramètreθ ;
– Set length1 = parameters1.Item("toto")puis length1.Value = 20.000: c’est par ce moyen
qu’on a accès au paramètretoto ;
– part1.Updatepermet de mettre à jour la géométrie suite à la modification duparamètreθ ;
– analysisCase1.Computepermet de calculer la nouvelle solutionu ;
Il suffit maintenant de réorganiser le fichier et d’insérer quelques lignes permettant de boucler
en modifiant la valeur de l’angleθ :
theta_min = 10
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 17
5.2 Modèle poutre
theta_max = 80
nmax = 11
n = 1
While (n <= nmax)
angle1.Value = theta_min+(theta_max-theta_min)*(n-1)/(nmax-1)
part1.Update
analysisCase1.Compute
n = n + 1
WEnd
Lancer la macro ainsi modifiée, et vérifier que tout se passe bien (évolution des paramètresθ
etu).
Il ne reste plus qu’à récupérer la valeur du déplacementu dans la boucle et à l’écrire dans
un fichier texte. Pour créer le fichier texte dans le répertoire souhaité, et pour écrire une ligne
d’entête on écrira le code suivant, hors de la boucle bien sûr:
Set objectFSO = CreateObject("Scripting.FileSystemObject")
Repertoire = "C:\Documents and Settings\...\Au choix"
Fichier_Sortie = Repertoire & "Lien_U_Theta.txt"
Set ObjetFichierF = objectFSO.CreateTextFile(Fichier_Sortie, TRUE)
ObjetFichierF.WriteLine("Theta (deg) U(mm)")
Pour écrire la valeur de l’angleθ et du déplacementu dans le fichier après chaque calcul, on
écrira la ligne suivante, après avoir remplacéSet length1 = parameters1.Item("toto")par Set
length1 = parameters1.Item("u"):
ObjetFichierF.WriteLine( (angle1.Value)& " " & (length1.Value))
Récupérer le fichier généré par la macro avec Excel par exemple, et tracer la courbe de com-
portement. Créer une nouvelle donnant le déplacement théorique et comparer les courbes as-
sociées au calcul analytique et numérique :
u = F43 − 10
√3 cot(θ) + 9 cot2(θ)
12
L
ES
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 18
5.2 Modèle poutre
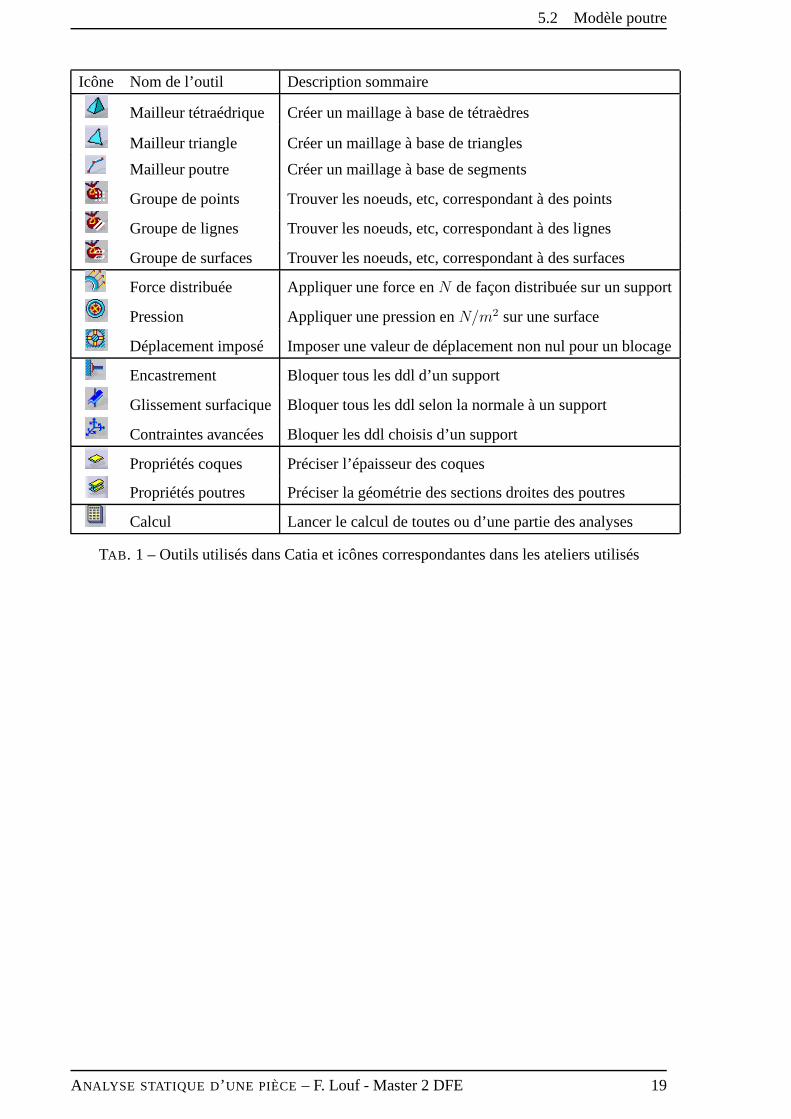
Icône Nom de l’outil Description sommaire
Mailleur tétraédrique Créer un maillage à base de tétraèdres
Mailleur triangle Créer un maillage à base de triangles
Mailleur poutre Créer un maillage à base de segments
Groupe de points Trouver les noeuds, etc, correspondant à des points
Groupe de lignes Trouver les noeuds, etc, correspondant à des lignes
Groupe de surfaces Trouver les noeuds, etc, correspondant à des surfaces
Force distribuée Appliquer une force enN de façon distribuée sur un support
Pression Appliquer une pression enN/m2 sur une surface
Déplacement imposé Imposer une valeur de déplacement non nul pour un blocage
Encastrement Bloquer tous les ddl d’un support
Glissement surfaciqueBloquer tous les ddl selon la normale à un support
Contraintes avancées Bloquer les ddl choisis d’un support
Propriétés coques Préciser l’épaisseur des coques
Propriétés poutres Préciser la géométrie des sections droites des poutres
Calcul Lancer le calcul de toutes ou d’une partie des analyses
TAB. 1 – Outils utilisés dans Catia et icônes correspondantes dans les ateliers utilisés
ANALYSE STATIQUE D’ UNE PIÈCE– F. Louf - Master 2 DFE 19