Embed Size (px)
Citation preview
Anatomie compréhensive des fonctions motricesPierre Rabischong Préface de Madjid Samii
Phot
othèque
i n c l u s e
© De Boeck Supérieur SAÉditions De Boeck UniversitéRue des Minimes, 39B-1000 Bruxelles
Tous droits réservés pour tous pays.Il est interdit, sauf accord préalable et écrit de l’éditeur, de reproduire (notamment par photocopie) partiellement ou totalement le présent ouvrage, de le stocker dans une banque de données ou de le communiquer au public, sous quelque forme ou de quelque manière que ce soit.
Composition : Anne GuillouxImprimé en Belgique
Dépôt légal :Bibliothèque nationale, Paris : novembre 2013 ISBN : 978-2-35327-237-2
Pour toute information sur notre fonds et les nouveautés dans votre domaine de spécialisation, consultez notre site web :
www.deboeck.com
Anatomie compréhensive des fonctions motricesPierre RabischongPréface de Madjid Samii
V
Remerciements
Je souhaiterais dédier ce livre :
à tous les étudiants auxquels j’ai eu le grand plaisir d’enseigner l’anatomie ;
à mes anciens assistants du laboratoire d’Anatomie de Montpellier ;
à mes amis du Collège Médical Français des Professeurs d’Anatomie qui continuent de défendre efficacement notre discipline ;
aux généreux donateurs qui, par le don de leur corps à notre laboratoire, ont permis la réalisation des images montrant la beauté du corps humain ;
à mes collaborateurs de l’Unité 103 de Recherches Biomécaniques de l’INSERM avec lesquels j’ai pu mener de nombreuses recherches et établir des coopérations avec des industriels, principalement de l’automobile, de l’aéronautique et du génie biologique et médical ;
à mes amis cliniciens, en particulier, les neurochirurgiens de la WFNS (World Federation on Neurosurgical Societies) qui m’ont permis de participer à des cours internationaux de formation, ainsi que les chirurgiens du GEM, le groupe d’étude de la main, dont j’ai été l'un des cinq membres fondateurs ;
à Fabrice et Amaury, pour leur soutien éditorial précieux ; et
à Anne, qui a assuré la composition de l'ouvrage.


VII
Préface
C’est pour moi un réel plaisir ainsi qu’un honneur d’écrire une préface au nouveau livre du Professeur Pierre Rabischong – que j’ai toujours admiré en tant qu’homme et que savant. Il est incontestablement l’un des hommes de science médicale les plus remarquables de ces cinquante dernières années. Ses activités de chercheur, qui vont bien au-delà du domaine de l’anatomie classique, de même que l’originalité de ses idées, ont influencé toute la médecine.
Le Professeur Pierre Rabischong a maîtrisé très tôt l’anatomie descriptive, mais cela ne lui a pas suffi. Il voulait comprendre l’interconnexion existant entre les fonctions du corps et les organes et systèmes spécifiques. L’étape suivante de ses recherches fut la biomécanique – les frontières artificielles entre spécialités n’existant pas pour lui. Il a apporté, dans chacun de ces domaines, une large et innovante contribution.
En réalité, le Professeur Pierre Rabischong n’est pas seulement un anatomiste – c’est un savant d’une grande érudition à qui l’on doit des contributions essentielles en matière d’anatomie, de physiologie, de chirurgie aidée par informatique, de neuroprothèse et de technologies médicales.
Un autre trait important du caractère du Professeur Pierre Rabischong réside dans ses efforts et son enthousiasme à expliquer à tous les étudiants en médecine et à ses collègues comment le corps humain est agencé et comment il fonctionne. Il a donné de nombreuses conférences dans le monde entier, auxquelles j’ai assisté à plusieurs occasions et que j’ai beaucoup appréciées. Dans le présent ouvrage, son objectif est de nous montrer « comment on doit comprendre l’anatomie au lieu d’en décrire seulement les structures ». Je suis très heureux qu’il ait décidé de condenser ses idées dans un nouveau livre consacré aux fonctions du corps humain. Cet ouvrage regroupe des sujets tels que l’appareil moteur, les fonctions spinales, la respiration, la locomotion, la préhension et même le langage, la déglutition, les fonctions sexuelles et celles de la vessie. Par conséquent, cet ouvrage est très utile pour tout le corps médical, toutes spécialités et domaines confondus. La lecture de ce livre est un réel plaisir ainsi qu’un défi intellectuel.
Madjid Samii, M.D., Ph.D., Professeur de NeurochirurgiePrésident de l'Institut International des Neurosciences (INI), Hanovre
IX
Chapitre 1 : Généralités sur la fonction de mobilité ...............................................................................................1
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Composantsdel’appareilmoteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.1.Leslevierssquelettiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22.2.Lesarticulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52.3.Lesmuscles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3. Commandeetcontrôlemoteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.1.Lacommandeproportionnelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.Larégulationmotrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3.Lecontrôlecentraldelamobilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Chapitre 2 : Les fonctions rachidiennes ......................................................................................................................................23
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
2. Stabilisationrachidienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242.1.Lesentréesduservomécanismerachidien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.2.Lescorrectionsmusculaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3. Rachiscervicaletservomécanismeœil/tête . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .293.1.Leprogrammevisuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2.Lajonctioncrânio-cervicale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.3.L’artèrevertébrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4. Rachisthoraciqueetdynamiquerespiratoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .394.1.Lediaphragme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2.Lecontrôlerespiratoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5. Rachislombaletanneaupelvien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .445.1.LavertèbreintermédiaireT12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.2.Lesquatrecolonnesmusculaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.3.Leconceptd’anneaupelvienbrisé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4.Importancefonctionnelledesmusclesdelaparoiabdominale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.5.Lesdouleursrachidiennes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
Chapitre 3 : La locomotion .................................................................................................................................................................................55
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
2. Postureverticale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.1.Lesentréesduservomécanismepostural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.2.Lescorrectionsmusculairesdel’équilibrationparimpulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3. Lamarche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.1.Lesniveauxdecontrôledelamarche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.2.Labiomécaniquedelamarche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3.Lacinématiquedelamarche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733.4.Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Sommaire
X S O M M A I R E
Chapitre 4 : La préhension ..................................................................................................................................................................................75
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .761.1.Lamobilitéspatiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 761.2.Lamain,outilmultiprisenonspécialisé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
2. Complexepoignet/main . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .792.1.Lesquatredoigtsmédians . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 792.2.Lepouce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.3.Lemassifcarpien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3. Ensemblehuméro-ulno-radial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .833.1.Laflexiondel’avant-bras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 833.2.L’extensiondel’avant-bras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 873.3.Laprono-supination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4. Complexecléïdo-scapulo-huméral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .874.1.Legroupemusculairescapulo-huméral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894.2.Legroupemusculairescapulo-rachidien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Chapitre 5 : La motricité oculaire ...........................................................................................................................................................93
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94
2. Centragefonctionneldesglobesoculaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3. Contrôlecentraldelamobilitéoculaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4. Nerfscrâniensoculo-moteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Chapitre 6 : La mimique faciale ..............................................................................................................................................................101
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
2. Constructiondel’étageorbitaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1042.1.Lesespacesliquidiensdelacornée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052.2.L’appareillacrymal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052.3.L’évacuationdeslarmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
3. Orificebuccalunique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
Chapitre 7 : La fonction masticatoire ...........................................................................................................................................113
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
2. Mouvementsdel’ATM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1152.1.L’articulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152.2.Lamobilisationarticulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3. Contrôledelaposturemandibulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1223.1.Rappeldesprincipesducontrôlemoteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1223.2.Positionetmouvementsmandibulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1233.3.Postureverticaleetposturemandibulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
XIS O M M A I R E
Chapitre 8 : La déglutition et la phonation .......................................................................................................................125
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.1.Lepremier:l’arcmandibulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.2.Ledeuxième:l’archyoïdien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.3.Letroisième:l’archyo-thyroïdien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1261.4.Lequatrième:l’arcthyro-aryténo-cricoïdien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
2. Carrefouraéro-digestif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
3. Déglutition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.1.Laphasebuccale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.2.Lafermeturedularynx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.3.Laphasepharyngienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4. Phonation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1354.1.Lesprincipesdebase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1354.2.Lamécaniquephonatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1364.3.Commandeetcontrôledelaphonation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
5. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Chapitre 9 : Les continences vésicale et rectale ...........................................................................................................151
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
2. Problèmesetsolutionstechniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1522.1.Lesréservoirspelviens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1522.2.Leprocessusd’évacuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
3. Commandeetcontrôle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1553.1.Leplexushypogastrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1563.2.Lesynchronismed’actiondesdeuxsphinctersstriés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Chapitre 10 : L’éjaculation et l’orgasme ...................................................................................................................................157
1. Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
2. Problèmestechniquesdelacopulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1582.1.Uninjecteuràrigiditévariable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1582.2.Unepompeurétralebulbo-spongieusepourl’injectionspermatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1592.3.Lacrisepérinéaleparoxystiquedel’éjaculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
3. Moteurd’inférence:l’orgasme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161
4. Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Conclusion ......................................................................................................................................................................................................................................165
Index ...........................................................................................................................................................................................................................................................167
Chapitre 1 : Généralités sur la fonction de mobilité ...............................................................................................1
Figure 1.1 Structure ostéonique de l’os compact sur lames minces d’os sec ............................................................................................ 3Figure 1.2 Méthodes extensométriques pour les études de résistance des matériaux .................................................................... 4Figure 1.3 Structure trabéculaire de l’os spongieux ......................................................................................................................................................... 4Figure 1.4 Sutures crâniennes .............................................................................................................................................................................................................. 5Figure 1.5 Symphyse pubienne en coupe axiale (sujet âgé)...................................................................................................................................... 8Figure 1.6 Coupes histologiques du rachis lombaire d’un enfant de trois ans ...................................................................................... 8Figure 1.7 Anatochronèse discale sur une coupe IRM sagittale du rachis lombaire ...................................................................... 9Figure 1.8 Pseudo-articulation unco-vertébrale ................................................................................................................................................................ 9Figure 1.9 Coupes sérielles du processus épineux de l’arrière vers l’avant .............................................................................................. 10Figure 1.10 Dessin d’un myocyte (entre 10 et 100 µm) formé par la fusion d’une centaine de myoblastes .............. 12Figure 1.11 Ultrastructure du sarcomère ................................................................................................................................................................................. 12Figure 1.12 Micro-dissection d’un fuseau neuromusculaire (1 cm) avec imprégnation argentique montrant les fibres nerveuses intrafusales .................................................................................................................................................. 16Figure 1.13 Organe de Golgi (coupes)......................................................................................................................................................................................... 17Figure 1.14 Robot de peinture (Régie Renault) ................................................................................................................................................................. 18Figure 1.15 Représentation corticale des claviers moteur (A) et sensitif (B) (Homonculus de Penfield) .................. 19Figure 1.16 Noyaux gris centraux ..................................................................................................................................................................................................... 19Figure 1.17 Injection micro-vasculaire du noyau olivaire inférieur de la moelle allongée (coupe axiale) ....................... 20
Chapitre 2 : Les fonctions rachidiennes ......................................................................................................................................23
Figure 2.1 Coupe axiale de L3 .......................................................................................................................................................................................................... 25Figure 2.2 Macule utriculaire sur une coupe sagittale du temporal ............................................................................................................. 25Figure 2.3 Muscles du rachis ............................................................................................................................................................................................................. 26Figure 2.4 Dissection des muscles spinaux ........................................................................................................................................................................... 27Figure 2.5 Ligament jaune sur coupes sagittales du rachis cervical .............................................................................................................. 28Figure 2.6 Ligament jaune lombal ................................................................................................................................................................................................ 28Figure 2.7 Le caméléon ........................................................................................................................................................................................................................... 29Figure 2.8 Coupes axiales du cardan ........................................................................................................................................................................................... 31Figure 2.9 Cardan occipito-cervical ............................................................................................................................................................................................ 32Figure 2.10 Muscles du cardan occipito-cervical............................................................................................................................................................... 33Figure 2.11 Coupes axiales du rachis cervical ........................................................................................................................................................................ 34Figure 2.12 Différents types d’arthrose cervicale ............................................................................................................................................................. 35Figure 2.13 Coupe axiale asymétrique du rachis cervical ........................................................................................................................................... 36
Liste des figures
XIIIL I S T E D E S F I G U R E S
Figure 2.14 Coupe axiale du rachis cervical ............................................................................................................................................................................ 36Figure 2.15 Coupes para-sagittales du cardan ..................................................................................................................................................................... 37Figure 2.16 Coupe axiale gauche au niveau du foramen occipital (vue par en dessous) .............................................................. 38Figure 2.17 Coupes sagittales et axiale de la jonction occipito-cervicale ................................................................................................... 38Figure 2.18 Anastomose par convergence des deux artères vertébrales ..................................................................................................... 39Figure 2.19 Rachis dorsal .......................................................................................................................................................................................................................... 40Figure 2.20 Diaphragme et cœur, vue de 3/4 avant ....................................................................................................................................................... 40Figure 2.21 Coupes coronales du cœur ...................................................................................................................................................................................... 41Figure 2.22 Coupes axiales du thorax vues par au-dessus ........................................................................................................................................ 42Figure 2.23 Articulation sacro-iliaque ......................................................................................................................................................................................... 45Figure 2.24 Anato chro nèse du disque lombal ...................................................................................................................................................................... 46Figure 2.25 Rupture de la partie postérieure du disque sans hernie discale............................................................................................. 47Figure 2.26 Dissection du canal inguinal .................................................................................................................................................................................. 49Figure 2.27 Ganglion spinal dans sa loge sous-pédiculaire .................................................................................................................................... 50Figure 2.28 Ganglion spinal lombal et fourreau dural ................................................................................................................................................. 51Figure 2.29 Foramen intervertébral lombal ............................................................................................................................................................................ 52
Chapitre 3 : La locomotion .................................................................................................................................................................................55
Figure 3.1 Les mécanorécepteurs de type Pacini ............................................................................................................................................................ 57Figure 3.2 Dissection des muscles antérieurs de la hanche ................................................................................................................................. 61Figure 3.3 Coupes coronale et sagittale de la hanche ................................................................................................................................................. 62Figure 3.4 Face postérieure de la hanche................................................................................................................................................................................ 62Figure 3.5 Muscles moyen et petit fessier .............................................................................................................................................................................. 63Figure 3.6 Coupes axiales de l’articulation coxo-fémorale .................................................................................................................................... 63Figure 3.7 Ouverture antérieure du genou gauche en flexion ............................................................................................................................ 64Figure 3.8 Coupes sagittales du genou ..................................................................................................................................................................................... 65Figure 3.9 Vue supérieure des ménisques ............................................................................................................................................................................. 65Figure 3.10 Coupe transversale du genou gauche au niveau de la rotule du genou gauche ..................................................... 66Figure 3.11 Dissection des muscles de la partie médiale du genou .................................................................................................................. 66Figure 3.12 Phase propulsive de la marche avec appui sur le triangle antérieur .................................................................................. 67Figure 3.13 Coupes coronale et axiale de la jonction tibio-fibulo-talienne droite ............................................................................ 68Figure 3.14 Coupes coronale et transversale du tarse du pied droit ................................................................................................................ 69Figure 3.15 Vue antérieure du cardan suro-podal gauche ........................................................................................................................................ 69Figure 3.16 Dessin de la face inférieure du tarse ............................................................................................................................................................... 70Figure 3.17 Coupes transversales de l’avant-pied gauche (vues de l’avant) ............................................................................................. 71Figure 3.18 Les tendons et ligaments du pied droit ........................................................................................................................................................ 72
XIV L I S T E D E S F I G U R E S
Chapitre 4 : La préhension ..................................................................................................................................................................................75
Figure 4.1 Les différents types de prise ..................................................................................................................................................................................... 76Figure 4.2 Test de reconnaissance d’un cube et de son orientation spatiale en l’absence de vision ................................... 77Figure 4.3 Capteur de mesure de force de prise au cours de tests de préhension (Unité 103 de l’INSERM) ........... 78Figure 4.4 Robotique anthropomorphe japonaise ........................................................................................................................................................ 78Figure 4.5 Les muscles longs fléchisseurs de la chaîne digitale ......................................................................................................................... 80Figure 4.6 Extension de la chaîne digitale ............................................................................................................................................................................. 81Figure 4.7 Coupes transversales de P1 (appareil extenseur dorsal et fléchisseur ventral) ....................................................... 81Figure 4.8 Dissection de l’appareil extenseur des doigts sur une main gauche ................................................................................ 82Figure 4.9 Les muscles du pouce .................................................................................................................................................................................................... 84Figure 4.10 Articulation du poignet ............................................................................................................................................................................................... 85Figure 4.11 Coupes transversales et IRM de la paume de la main ................................................................................................................... 86Figure 4.12 Coupes transversales du tronc en vue supérieure ............................................................................................................................... 88
Chapitre 5 : La motricité oculaire ...........................................................................................................................................................93
Figure 5.1 Cortex visuel occipital et noyau géniculé latéral (NGL) ............................................................................................................. 94Figure 5.2 Coupes de l’orbite ............................................................................................................................................................................................................. 95Figure 5.3 Coupes frontales droites et axiales de l’orbite ........................................................................................................................................ 96Figure 5.4 Le muscle oblique supérieur ................................................................................................................................................................................... 97Figure 5.5 Dessin de la loge caverneuse et du cavum trigéminal .................................................................................................................... 98Figure 5.6 Nerfs oculo-moteurs et trijumeau gauches ............................................................................................................................................. 99Figure 5.7 Nerfs oculo-moteurs et nerf trijumeau ........................................................................................................................................................ 99
Chapitre 6 : La mimique faciale ..............................................................................................................................................................101
Figure 6.1 Le nerf facial (VII) à sa sortie du temporal ...........................................................................................................................................102Figure 6.2 Le nerf facial (VII) intra-pétreux ...................................................................................................................................................................103Figure 6.3 Coupes sérielles coronales d’une oreille droite (vues de l’avant) ......................................................................................104Figure 6.4 Coupes axiales sérielles des fosses nasales (vues par en dessous) .....................................................................................105Figure 6.5 Ganglion ptérygo-palatin du VII (secrétion lacrymale et muqueuse) ........................................................................106Figure 6.6 Sac lacrymal et muscle de Horner ..................................................................................................................................................................107Figure 6.7 Le canal lacrymo-nasal pour l’évacuation des larmes .................................................................................................................107Figure 6.8 Le nerf facial (VII) à son entrée dans l’os temporal ......................................................................................................................109Figure 6.9 Vue de face du masque facial .............................................................................................................................................................................110Figure 6.10 Vue latérale du masque facial .............................................................................................................................................................................110Figure 6.11 Coupes anatomiques axiales de l’hémiface gauche chez un sujet jeune (vues par au-dessus) ...................111
XVL I S T E D E S F I G U R E S
Chapitre 7 : La fonction masticatoire ...........................................................................................................................................113
Figure 7.1 Muscles temporal et masséter gauches .....................................................................................................................................................114Figure 7.2 Articulation temporo-mandibulaire (ATM) ......................................................................................................................................116Figure 7.3 IRM de l’articulation temporo-mandibulaire droite en coupes coronales .............................................................117Figure 7.4 Coupes sagittales obliques selon l’axe du muscle ptérygoïdien latéral (MPL à 45°) .....................................118Figure 7.5 Coupes axiales de l’ATM droite vues par au-dessus ....................................................................................................................118Figure 7.6 Les muscles masticateurs en coupes coronales sériées (vues de l’avant) ...................................................................119Figure 7.7 Coupes sagittales et axiale de la région infra-temporale droite .........................................................................................120Figure 7.8 Coupe axiale vue par en dessous : le compromis biomécanique du muscle ptérygoïdien latéral .............121Figure 7.9 Coupes coronales de l’hémiface inférieure droite ...........................................................................................................................121Figure 7.10 Commande centrale de la motricité avec boucle de régulation stato-kinétique ...............................................122
Chapitre 8 : La déglutition et la phonation .......................................................................................................................125
Figure 8.1 Topographie générale sur une coupe sagittale médiane de la face ouverte en deux moitiés .................127Figure 8.2 Coupes axiales d’une tête de nouveau-né (vues par en dessous) .......................................................................................129Figure 8.3 Coupes axiales de la base du crâne vues par en dessous – os temporal .......................................................................129Figure 8.4 Coupes parasagittales de la face et du rachis cervical d’un nouveau-né ....................................................................130Figure 8.5 Coupes sérielles coronales du larynx de l’avant vers l’arrière (cadavre non injecté) .......................................131Figure 8.6 Dissection de la face postérieure du larynx ...........................................................................................................................................132Figure 8.7 Schéma de la déglutition .........................................................................................................................................................................................133Figure 8.8 Coupes sérielles axiales du larynx vues par au dessus (du haut vers le bas) ............................................................134Figure 8.9 Étude en coupes sagittales IRM des résonateurs naso-buccaux .....................................................................................137Figure 8.10 Dissection de la partie antéro-latérale gauche du cou ................................................................................................................138Figure 8.11 Schéma de la dynamique vélo-tubaire .......................................................................................................................................................139Figure 8.12 Muscles du voile du palais .....................................................................................................................................................................................140Figure 8.13 Anatomie sérielle de la chaîne ossiculaire sur coupes coronales et sagittales d’une oreille droite .........141Figure 8.14 Coupes axiales d’une oreille droite en vue supérieure .................................................................................................................142Figure 8.15 Ostium pharyngien de la trompe auditive sur une coupe parasagittale des fosses nasales .....................143Figure 8.16 Coupe axiale de la tête ...............................................................................................................................................................................................143Figure 8.17 Coupes coronales, moitié droite, vues de l’arrière ........................................................................................................................144Figure 8.18 Bases anatomiques de l’ouverture tubaire ..............................................................................................................................................145
Chapitre 9 : Les continences vésicale et rectale ...........................................................................................................151
Figure 9.1 Dissection de l’ampoule rectale ........................................................................................................................................................................152Figure 9.2 Sangle du muscle pubo-rectal sur une vue de profil interne de l’os coxal droit ..................................................153Figure 9.3 Vue générale du pelvis et des sphincters ..................................................................................................................................................154Figure 9.4 Rectum et sphincters du canal anal ..............................................................................................................................................................155

XVI L I S T E D E S F I G U R E S
Chapitre 10 : L’éjaculation et l’orgasme ...................................................................................................................................157
Figure 10.1 Dissection du périnée antérieur chez l’homme .................................................................................................................................159Figure 10.2 Dissection des muscles du périnée antérieur chez l’homme et de la pompe bulbo-spongieuse ........160Figure 10.3 Système de mesure des contractions musculaires anale et vaginale ..............................................................................160Figure 10.4 Enregistrement de la crise périnéale orgasmique............................................................................................................................162Figure 10.5 Enregistrement de la crise périnéale orgasmique chez la femme ....................................................................................162Figure 10.6 Vue antérieure de la vulve ......................................................................................................................................................................................163
1
1. Généralités
2. Composants de l’appareil moteur
3. Commande et contrôle moteur
4. Références
Généralités sur la fonction de mobilité
1Chapitre

2 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
1. GÉNÉRALITÉSLa mobilité est l’une des quatre fonctions gérées par
le système nerveux. Elle permet les déplacements des différents segments du corps dans l’espace, ou le maintien de ceux-ci dans une position contrôlée (posture). Elle occupe une très grande partie de la masse corporelle et forme l’appareil moteur, comprenant :• les os assemblés dans le squelette ;• les articulations qui les réunissent ; et• les muscles qui les mobilisent ou les immobilisent.
Le système nerveux de la commande motrice occupe une très grande place dans le système nerveux central (encéphale avec cerveau, tronc cérébral et cervelet) et dans le système nerveux périphérique (racines, plexus et nerfs). Des notions précises de biomécanique sont indis-pensables pour comprendre la complexité et l’intelligence de conception de tous ces organes [1–4] .
2. COMPOSANTS DE L’APPAREIL MOTEUR
2.1. Les leviers squelettiques Ils sont formés par les os qui constituent la charpente
squelettique et sont formés de deux types de tissu osseux.
2.1.1. Os spongieux et os compact [5–14]Les os sont des structures résistantes grâce à leur
contenu minéral formé principalement de microcristaux d’hydroxyl-apatite, de phosphate et de carbonate de calcium, et qui est fixé sur une matrice protéique formant la substance fondamentale faite à 90 % de collagène et de mucoprotéines. Ils ont différentes formes ce qui permet de les classer en os courts, longs et plats.
Leur formation au cours de l’embryogenèse se fait selon deux modalités :• soit directement sur une membrane fibreuse (os de la
voûte du crâne) ; et• soit indirectement par l’intermédiaire d’un moule
carti lagineux qui s’ossifie secondairement après péné-tration de vaisseaux sanguins.On distingue deux types de tissu osseux : compact et
spongieux.Le tissu osseux compact est constitué de groupements
d’unités fonctionnelles, les ostéons, centrés par un micro-vaisseau qui apporte sur place les ostéoblastes issus du sang circulant (Fig . 1 .1). Grâce à leur phosphatase alcaline, ces derniers amorcent la construction d’une structure circulaire faite de lamelles concentriques dans lesquelles se placent les ostéocytes. Ce sont les véritables cellules osseuses qui assurent la minéralisation de l’os et son maintien. Elles sont placées dans des microcavités, les ostéoplastes, qui communiquent entre elles grâce à de très fins canalicules, créant ainsi un réseau d’inter com-
munication ostéocytaire. L’ensemble compose une structure fasciculaire regroupant les minicylindres ostéoniques, dont le comportement mécanique viscoélastique est fonction de la pente des fibres collagènes de la matrice protéique, déterminant leur déformation longitudinale et transversale sous facteur de charge.
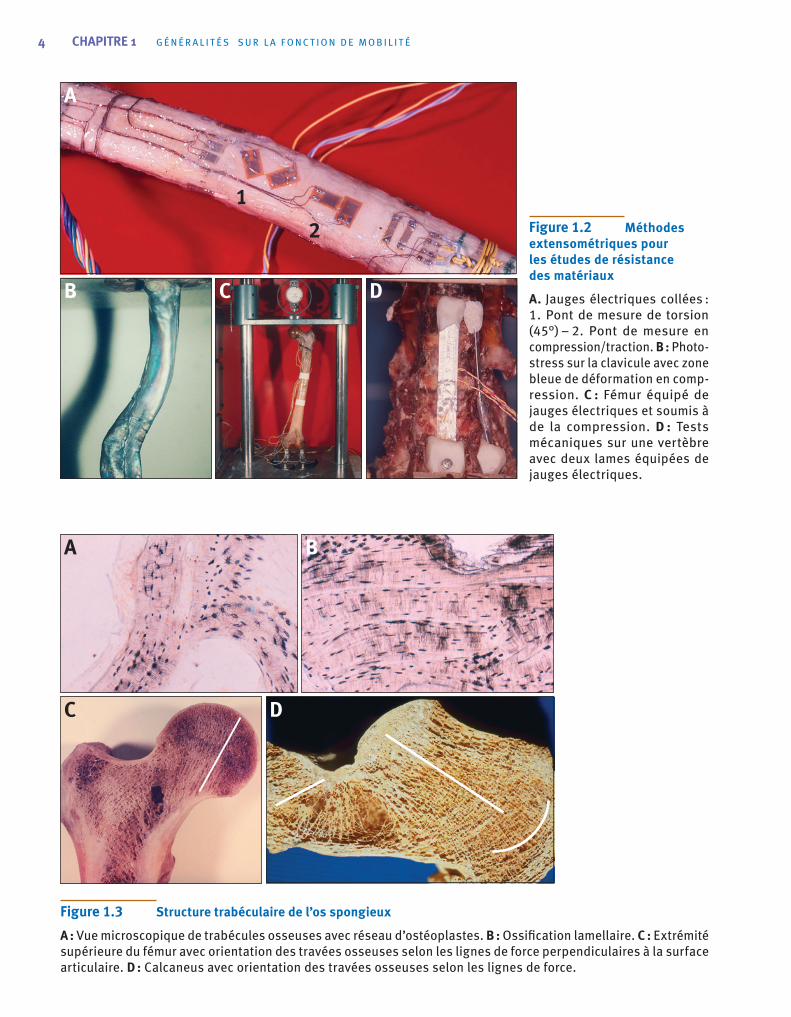
Sur le plan mécanique, la contrainte caractérise la réaction d’un matériau à une sollicitation mécanique. Elle ne se mesure pas directement, mais par la déformation du matériau entraînée par cette sollicitation. L’extensométrie est le domaine de la mesure de ces déformations qui peut en particulier se faire en utilisant des jauges électriques qui sont des circuits électriques collés sur les structures à étudier (Fig . 1 .2). Leur variation de résistance permet de mesurer très précisément la valeur de la déformation. Le module d’élasticité longitudinal (E, module d’Young) de l’os compact est de l’ordre de 15 000 à 20 000 MPa (2 000 daN/mm2) et il varie d’un os à l’autre [7]. Le coefficient de Poisson est le rapport entre la déformation longitudinale (ε1) et transversale (ε2). L’os est donc un matériau non homogène et anisotrope. Il faut tenir compte de ces paramètres pour comprendre le comportement mécanique d’un montage d’ostéosynthèse par plaques et vis en métal, de module d’Young très différent de celui de l’os, et de l’ordre de 200 000 MPa (20 000 daN/mm2).
Le tissu osseux spongieux a une structure en nid d’abeille avec des travées osseuses longitudinales qui suivent les lignes de force principales, et de fines travées transversales de « frettage » assurant la solidité de l’ensemble. Cette orientation selon les lignes de force est déjà présente chez le fœtus avant la mise en charge du squelette (Fig . 1 .3). Cette structure peut être comparée à celle du ferraillage du béton avec des tiges épaisses et de minces entrelacs de fils métalliques assurant la cohésion de l’arma-ture. Mécaniquement, le tissu spongieux est résistant grâce à sa géométrie et non à la quantité de matériau osseux, qui est réduite avec l’avantage d’un gain de poids important. Toutefois, il est faiblement élastique et il garde des déformations résiduelles en cas de compression excessive, comme c’est le cas des fractures par tassement des corps vertébraux ou des plateaux tibiaux. A l’intérieur de ses mailles, le fragile tissu hématopoïétique qui produit les éléments figurés du sang se trouve protégé. Les ailes des avions modernes ont cette structure en nid d’abeille dans laquelle circule le kérosène.
2.1.2. Le capteur de force ostéoniqueOn sait qu’il existe une relation entre les facteurs
mécaniques et l’os, mais il n’avait pas été possible jusqu’à présent de trouver des capteurs de force au niveau de l’os, sauf quelques corpuscules de Pacini dans le périoste. Ceux-ci ci ne peuvent pas rendre compte des sollicitations mécaniques exercées sur l’os dans les trois directions. Compte tenu de la structure ostéonique décrite précé-demment avec son réseau interconnecté de microcanalicules, tout l’os devient un capteur de force sensible aux sollicitations mécaniques et principalement à la compression.
32. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R 3
1
A
C
B
D
2
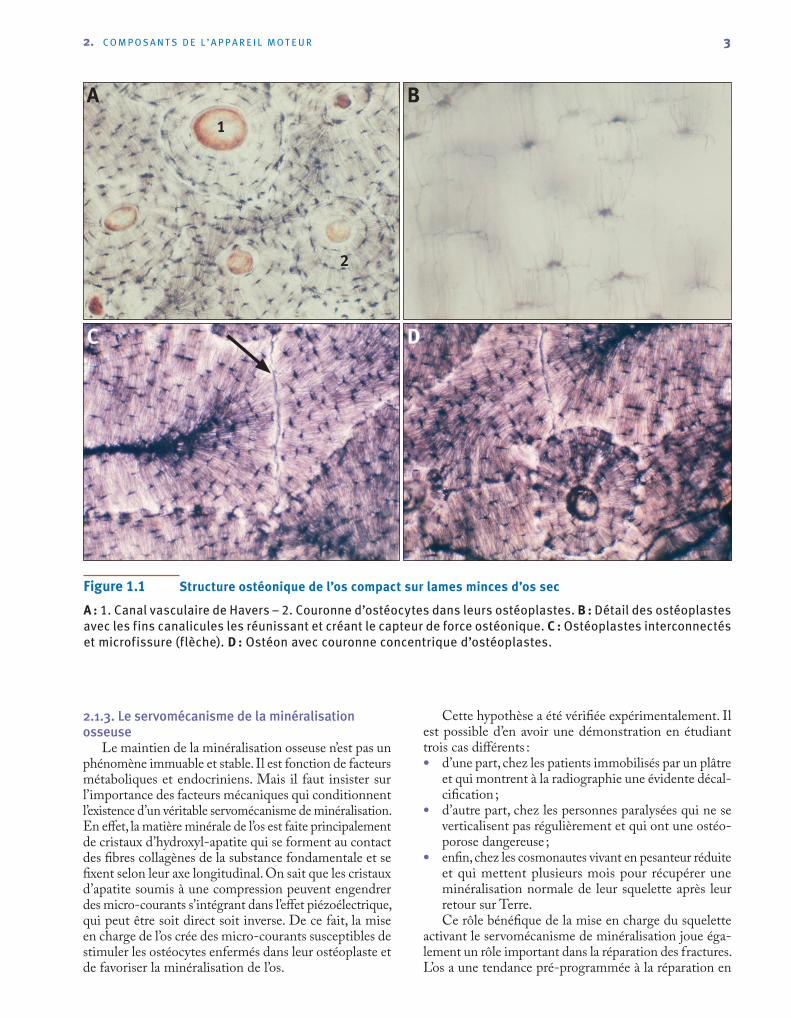
Figure 1.1 Structure ostéonique de l’os compact sur lames minces d’os sec
A : 1 . Canal vasculaire de Havers – 2 . Couronne d’ostéocytes dans leurs ostéoplastes . B : Détail des ostéoplastes avec les fins canalicules les réunissant et créant le capteur de force ostéonique . C : Ostéoplastes interconnectés et microfissure (flèche) . D : Ostéon avec couronne concentrique d’ostéoplastes .
2.1.3. Le servomécanisme de la minéralisation osseuse
Le maintien de la minéralisation osseuse n’est pas un phénomène immuable et stable. Il est fonction de facteurs métaboliques et endocriniens. Mais il faut insister sur l’importance des facteurs mécaniques qui conditionnent l’existence d’un véritable servomécanisme de minéralisation. En effet, la matière minérale de l’os est faite principalement de cristaux d’hydroxyl-apatite qui se forment au contact des fibres collagènes de la substance fondamentale et se fixent selon leur axe longitudinal. On sait que les cristaux d’apatite soumis à une compression peuvent engendrer des micro-courants s’intégrant dans l’effet piézoélectrique, qui peut être soit direct soit inverse. De ce fait, la mise en charge de l’os crée des micro-courants susceptibles de stimuler les ostéocytes enfermés dans leur ostéoplaste et de favoriser la minéralisation de l’os.
Cette hypothèse a été vérifiée expérimentalement. Il est possible d’en avoir une démonstration en étudiant trois cas différents :• d’une part, chez les patients immobilisés par un plâtre
et qui montrent à la radiographie une évidente décal-cification ;
• d’autre part, chez les personnes paralysées qui ne se verticalisent pas régulièrement et qui ont une ostéo-porose dangereuse ;
• enfin, chez les cosmonautes vivant en pesanteur réduite et qui mettent plusieurs mois pour récupérer une minéralisation normale de leur squelette après leur retour sur Terre.Ce rôle bénéfique de la mise en charge du squelette
activant le servomécanisme de minéralisation joue éga-lement un rôle important dans la réparation des fractures. L’os a une tendance pré-programmée à la réparation en
4 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
A
C
B
D
Figure 1.3 Structure trabéculaire de l’os spongieux
A : Vue microscopique de trabécules osseuses avec réseau d’ostéoplastes . B : Ossification lamellaire . C : Extrémité supérieure du fémur avec orientation des travées osseuses selon les lignes de force perpendiculaires à la surface articulaire . D : Calcaneus avec orientation des travées osseuses selon les lignes de force .
1
2
A
B C D
Figure 1.2 Méthodes extensométriques pour les études de résistance des matériaux
A. Jauges électriques collées : 1 . Pont de mesure de torsion (45°) – 2 . Pont de mesure en compression/traction . B : Photostress sur la clavicule avec zone bleue de déformation en compres sion . C : Fémur équipé de jauges électriques et soumis à de la compression . D : Tests mécaniques sur une vertèbre avec deux lames équipées de jauges électriques .
52. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R
cas de rupture. Des galeries se forment au travers de la zone de rupture grâce à l’action des ostéoclastes, cellules capables de résorber l’os, qui sont suivis par une cohorte d’ostéoblastes capables d’assurer la reconstruction osseuse. Toutefois, pour que ce travail précis et microscopique puisse s’exécuter dans de bonnes conditions, il faut impé-rativement que les deux fragments osseux soient pour un temps rigoureusement immobilisés. Ceci justifie toutes les méthodes orthopédiques et chirurgicales : plâtres, vis, clous… Comme l’a bien montré l’équipe du Professeur Müller de Berne et Davos, la mise en compression cor-rectement dosée du foyer de fracture après immobilisation stimule notablement les progrès de la régénération osseuse.
2.2. Les articulationsUne articulation est la jonction de deux pièces sque-
lettiques. Elle est faite soit pour empêcher le mouvement en bloquant les pièces squelettiques après la phase de croissance, soit pour le mouvement dont l’amplitude est variable en fonction de la forme des surfaces articulaires en présence et de leurs moyens de contention capsulaire et ligamentaire.
2.2.1. Articulations immobiles : les sutures crâniennesLe crâne est formé de deux parties :
• le neurocrâne, qui abrite l’encéphale ; et
• le splanchnocrâne qui forme la charpente des cavités de la face (partie inférieure de l’orbite, fosses nasales et cavité buccale).Le but ultime de la croissance crânienne est de former
un bloc osseux avec une pièce mobile, la mandibule, et une jonction avec la colonne cervicale, le cardan occipito-cervical. L’encéphale est formé au début du développement par trois formations :• des vésicules télencéphaliques paires donnant les
hémisphères cérébraux, et une formation impaire les reliant par la zone des commissures ;
• une vésicule diencéphalique donnant les thalamus ; et• une vésicule rhombencéphalique, donnant le tronc
cérébral avec ses trois étages : mésencéphalique, pon-tique et médullaire auquel est appendu le cervelet.Chez l’embryon, la croissance neurale est rapide et
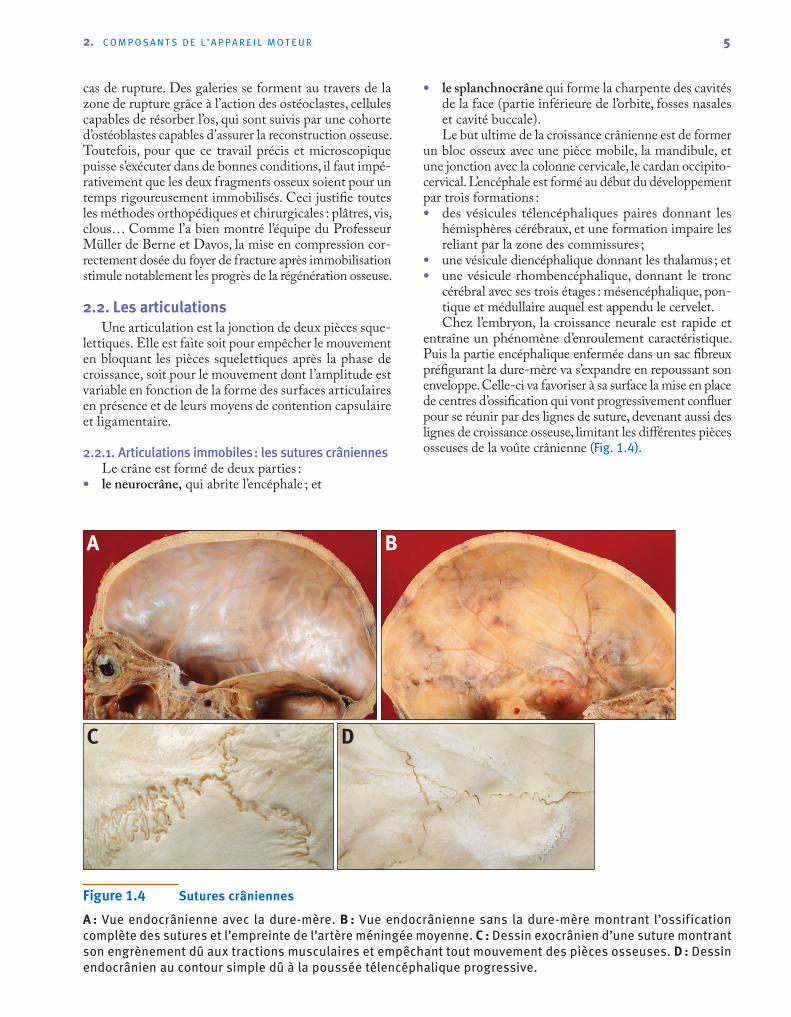
entraîne un phénomène d’enroulement caractéristique. Puis la partie encéphalique enfermée dans un sac fibreux préfigurant la dure-mère va s’expandre en repoussant son enveloppe. Celle-ci va favoriser à sa surface la mise en place de centres d’ossification qui vont progressivement confluer pour se réunir par des lignes de suture, devenant aussi des lignes de croissance osseuse, limitant les différentes pièces osseuses de la voûte crânienne (Fig . 1 .4) .
5
A
C
B
D
Figure 1.4 Sutures crâniennes
A : Vue endocrânienne avec la duremère . B : Vue endocrânienne sans la duremère montrant l’ossification complète des sutures et l’empreinte de l’artère méningée moyenne . C : Dessin exocrânien d’une suture montrant son engrènement dû aux tractions musculaires et empêchant tout mouvement des pièces osseuses . D : Dessin endocrânien au contour simple dû à la poussée télencéphalique progressive .

6 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
a. La base du crâneLa base du crâne qui sert de socle pour l’encéphale se
forme différemment. La chorde dorsale, qui est avec l’axe nerveux central l’inducteur de la croissance des corps vertébraux et de l’arc neural postérieur, se prolonge jusqu’à l’intérieur de la base du crâne au voisinage de la partie postérieure de la selle turcique, carrefour central de la base qui abrite l’hypophyse. De ce fait, la fosse postérieure de la base du crâne a une partie médiane d’ « inspiration vertébrale » formant le clivus par la réunion du processus basilaire de l’occipital et de la partie postérieure du corps du sphénoïde. En avant de la selle turcique se trouve la partie préchordale de la base avec, au centre, le crible olfactif ethmoïdal et sur les côtés, les toits orbitaires. Entre les deux parties existe une angulation qui est fonction du degré de développement de l’encéphale et du massif facial. On parle chez l’homme d’une angulation cyphotique et chez les animaux d’une angulation lordotique. Cette cyphose de la base du crâne chez l’homme a été qualifiée par Bolk de « foetalisation », car ce sens de l’angulation basale est celui du fœtus. L’ouverture anatomique des fosses nasales est toujours, quelle que soit l’angulation cyphotique ou lordotique de la base, parallèle au plan du crible olfactif.
En réalité, le fort développement du télencéphale chez l’homme amène, d’une part, au cours du développement chez l’embryon une voussure caractéristique de la région frontale, puis une rotation vers l’arrière, entraînant les structures nerveuses internes, telles que le noyau caudé et les cavités ventriculaires hémisphériques. D’autre part, en poussant en avant sur le mur frontal, il empêche le compas basal de s’ouvrir, ce qui n’est pas le cas chez les animaux. Les deux facteurs morphogénétiques fonda-mentaux sont la croissance du télencéphale et celle de la face. Il faut noter que la partie postérieure clivo-vertébrale centrée par l’axe nerveux moelle allongée/moelle cervicale présente une angulation quasiment identique chez tous les vertébrés (angle de Dabelow), ce qui permet d’établir une représentation dynamique des variations du crâne des oiseaux à l’homme.
b. La voûte crâniennePour ce qui est de la voûte, ou calvarium, la plasticité
des enveloppes crâniennes se modifie durant la croissance en devenant progressivement moins déformable du fait des centres d’ossification, ce que l’on peut appeler l’acco-modation neurocrânienne. En effet, le télencéphale a chez l’embryon sa partie superficielle corticale parfaitement lisse. La mise en place de la matrice corticale neuronale verticale et horizontale, par migration des neuroblastes de la zone périventriculaire vers la superficie du cortex, entraîne des phénomènes de croissance tangentielle allant vers une augmentation, non seulement volumétrique, mais également de surface. Cette expansion durant la fin de la période fœtale se heurte à la moindre plasticité de l’enveloppe dure mérienne et crânienne, ce qui entraîne un phénomène de plicature du cortex, dominé par des
facteurs mécano-géométriques bien étudiés par Brummel-kamp. Ainsi naissent les sillons et les circonvolutions (gyri) qui présentent de nombreuses variations individuelles, mais qui néanmoins gardent des marques anatomiques identiques chez tous les individus. C’est le cas des sillons centraux (Rolando) et latéraux (Sylvius) avec un rôle fixateur, dans la rotation vers l’arrière des vésicules télencé-phaliques, des structures internes, telles que l’insula et les noyaux gris centraux. Le corps calleux, la plus importante commissure télencéphalique, impose une fissuration parallèle du cortex interhémisphérique qui n’existe pas en cas d’agénésie du corps calleux.
c. Le rôle important du télencéphaleIl est important de considérer que, dans cette accom-
modation neurocrânienne, le moteur de l’expansion crânienne est le télencéphale et que rien ne peut contrarier sa force de croissance. Autrement dit, la forme du crâne cérébral est l’expression même du développement du télencéphale, c’est-à-dire du cerveau. Il y a, dans la panoplie phénotypique de l’homme, des gros cerveaux et des petits cerveaux. La « soufflure occipitale » peut être considérée comme un indice de sur-développement du cerveau. Il est assez logique de penser que compte tenu de la valeur fonctionnelle des composants neuronaux dans la spé-culation mentale et la compréhension des problèmes, les gros cerveaux doivent garder un avantage. Pour en atténuer l’importance, on peut dire aussi que, à égalité d’instrument, il y a beaucoup de façons d’en jouer. Mais on ne peut pas jouer du violoncelle avec un violon, ce qui permet d’insister sur l’importance des facteurs génétiques dans la construc-tion de l’instrument cérébral.
La poussée de la croissance télencéphalique ne peut pas être freinée par une anomalie d’une ligne de croissance suturaire. On connaît les déformations crâniennes (turi-céphalie, scaphocéphalie, etc.) qui sont la marque de la compensation de croissance trouvée naturellement dans une autre direction que celle de la suture déficiente. De même, les déformations ethniques du crâne telle que celles des Mayas, qui entourent à la naissance le crâne du nouveau-né dans un bonnet serré, n’empêchent pas l’expansion télencéphalique. Certains croient encore à la théorie émise par Virchow qui, observant le crâne d’un microcéphale débile mental profond, nota une synostose précoce des sutures crâniennes et en conclut que cette fermeture prématurée avait étouffé le développement du télencéphale, expliquant l’arriération mentale. Mais jamais le crâne ne peut empêcher le cerveau de croître et il est illusoire, en opérant les synostoses prématurées de certaines sutures entraînant des déformations crâniennes chez les jeunes enfants, de croire que l’on peut améliorer le développement cérébral.
Une malformation congénitale, par agénésie du télencéphale créant l’anencéphalie, se traduit par une absence de voûte crânienne avec cependant une base du crâne et un splanchnocrâne sensiblement normaux. Il n’y a donc pas de voûte crânienne sans télencéphale. Dans

72. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R 7
l’autre sens, le maintien anormal de la poussée télencépha-lique, comme c’est le cas de l’hydrocéphalie par trouble de la circulation du liquide céphalo-rachidien intracérébral, entraîne une croissance anormale de la voûte crânienne qui peut prendre des proportions impressionnantes.
Quand la croissance du cerveau est terminée, vers l’âge de 20 ans, les sutures arrêtent leur croissance et se ferment par synostose en commençant par leur versant endocrânien. Dans une suture, il y a en effet deux parties séparées par une mince couche de tissu spongieux, le diploë, subissant des influences mécaniques différentes : la partie endocrâ-nienne a un dessin de suture quasi linéaire, ce qui est en rapport avec la nature de la poussée expansive télencé pha -li que qui est progressive et régulière ; en revanche, la partie exocrânienne est soumise à des sollicitations mécaniques intermittentes et d’intensité variable. Il s’agit des tractions exercées par les muscles masticateurs et principalement le muscle temporal et par les muscles de la nuque qui s’appuient sur l’os occipital et maintiennent la tête en position. Quand ces muscles ont une puissance suffisante permettant le port de la tête et la mastication d’aliments durs, ils exercent des tractions tangentielles sur l’exocrâne expliquant à terme le dessin festonné des sutures. Leur engrènement rend difficile la séparation des pièces osseuses et la rend impossible quand la synostose crânienne est achevée. On a pu démontrer expérimentalement chez le chien nouveau-né que la section du muscle temporal entraîne une suppression du dessin festonné des sutures latérales. Une hydrocéphalie post-traumatique du jeune adulte peut engendrer une dissociation des sutures, mais chez le sujet de 50 ans, elle crée une hypertension intracrânienne avec ses répercussions percep-tibles cliniquement sur l’appareil visuel et principalement la rétine. Le fond d’œil peut dans ce cas faire le diagnostic.
De ce fait, chez le fœtus et le nouveau-né, les sutures sont rectilignes, unissant les pièces osseuses qui gardent pendant une à deux années des zones de coalescence uniquement fibreuses, les fontanelles : au niveau du bregma à la jonction des os frontal et pariétaux, et au niveau du lambda, à la jonction des pariétaux et de l’occipital. Chez l’adulte, les sutures se ferment d’abord du côté endocrânien puis exocrânien où elles restent visibles, mais non mobilisables ou dissociables.
L’ostéopathie dite crânienne est basée sur la perception d’un rythme particulier au travers de la peau du crâne, et sur une tentative de mobilisation des sutures. Or, celle-ci est impossible à partir d’un certain âge. L’efficacité réelle de cette technique est donc à rechercher non pas dans une mobilisation impossible des pièces osseuses, mais sur une action sur la peau de l’extrémité céphalique, très riche en récepteurs de toutes sortes et en complexes neurovas-culaires. Il semblerait important que les ostéopathes changent leurs explications, ce qui, compte tenu de ce que l’on sait des habitudes dans le domaine des thérapies de ce type, prendra sûrement beaucoup de temps.
2.2.2. Articulations mobilesElles permettent le mouvement des segments sque-
lettiques qu’elles réunissent selon deux modalités : soit
sans contact direct entre les pièces squelettiques (amphi-arthroses) avec interposition d’un tissu fibreux (synfibroses) ou cartilagineux (synchondroses), soit avec contact direct qui implique un joint cartilagineux interposé (diarthroses).
a. Les amphiarthrosesElles se trouvent dans le plan sagittal antérieur et
postérieur.
b. La symphyse pubienne (Fig . 1 .5)Elle s’intègre dans la triangulation articulaire sacro-
iliaque qui brise l’anneau pelvien en augmentant sa résistance mécanique. Elle est formée par des fibres transversales très résistantes, amarrées sur une plaque cartilagineuse. Elle est soumise à des contraintes de cisaillement vertical qui aboutissent à terme à la création d’une fissuration, qui peut être à l’origine de pubalgies, en particulier chez les footballeurs en rapport avec le balancement puissant du membre inférieur avec choc sur le ballon.
c. Les amphiarthroses intervertébralesElles forment le disque intervertébral [15,16] dont le
rôle est de maintenir un espace incompressible mais déformable entre les vertèbres pour permettre l’amortis-sement des sollicitations verticales, principalement au cours de la locomotion (choc talonnier de la marche, course, saut) et les mouvements du rachis dans les trois directions de l’espace. Le seul milieu incompressible est le liquide, mais il est difficile d’imaginer de mettre une poche d’eau entre les vertèbres qui ne résisterait pas aux pressions exercées.
La solution originale est de piéger l’eau dans un matériau hydrophile constituant un « gel armé » fibrillaire, grâce aux fibres de protéoglycan (65 %) associées à des fibres collagènes (25 % type II), placées dans la partie centrale (nucleus pulposus) du disque. Celle-ci est maintenue par la partie périphérique (annulus fibrosus) faite de 60 % de collagène types I et II et de 20 % de protéoglycan dans des lamelles fibreuses concentriques, épaisses et orientées selon trois directions, circulaire et obliques [17].
L’amarrage du disque se fait sur une plaque cartila-gineuse (tissu avasculaire), traversée par les fibres de la zone périphérique qui vont se fixer sur l’os du plateau vertébral. Au centre, le matériel hydrophile est en contact avec la plaque cartilagineuse qui est un tissu poreux semi-perméable (Fig . 1 .6) .
Il existe donc des échanges liquidiens entre le disque et les plexus sous-chondraux du corps vertébral sous facteur de charge (fluage discal), qui s’inversent dans le repos allongé, créant ainsi un effet de pompe discale. L’intérêt fonctionnel de cette pompe discale est de créer un gradient de pression à l’intérieur du tissu spongieux du corps vertébral qui favorise la sortie des éléments figurés du sang élaborés dans le tissu hémato-poïétique vers la grosse veine vertébrale postérieure reliée aux plexus veineux épiduraux. La validation de ce concept se trouve
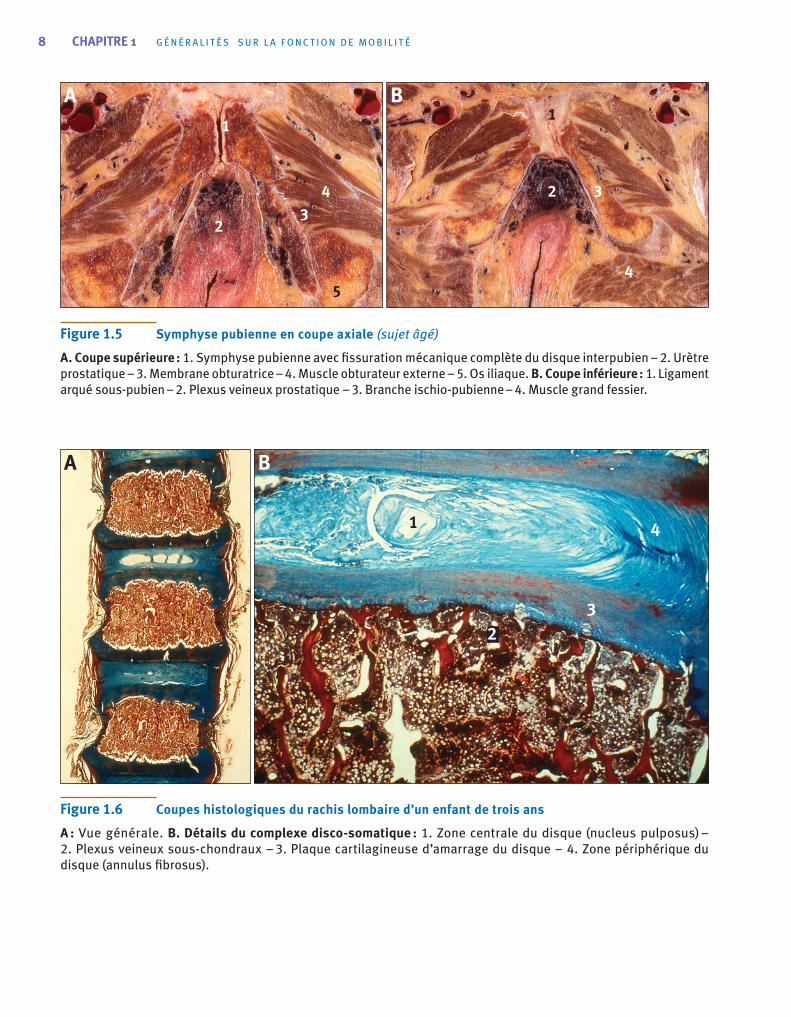
8 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
Figure 1.5 Symphyse pubienne en coupe axiale (sujet âgé)
A. Coupe supérieure : 1 . Symphyse pubienne avec fissuration mécanique complète du disque interpubien – 2 . Urètre prostatique – 3 . Membrane obturatrice – 4 . Muscle obturateur externe – 5 . Os iliaque . B. Coupe inférieure : 1 . Ligament arqué souspubien – 2 . Plexus veineux prostatique – 3 . Branche ischiopubienne – 4 . Muscle grand fessier .
Figure 1.6 Coupes histologiques du rachis lombaire d’un enfant de trois ans
A : Vue générale . B. Détails du complexe disco-somatique : 1 . Zone centrale du disque (nucleus pulposus) – 2 . Plexus veineux souschondraux – 3 . Plaque cartilagineuse d’amarrage du disque – 4 . Zone périphérique du disque (annulus fibrosus) .
4
32
1
A B
4 3
11
3
2
54
2
BA
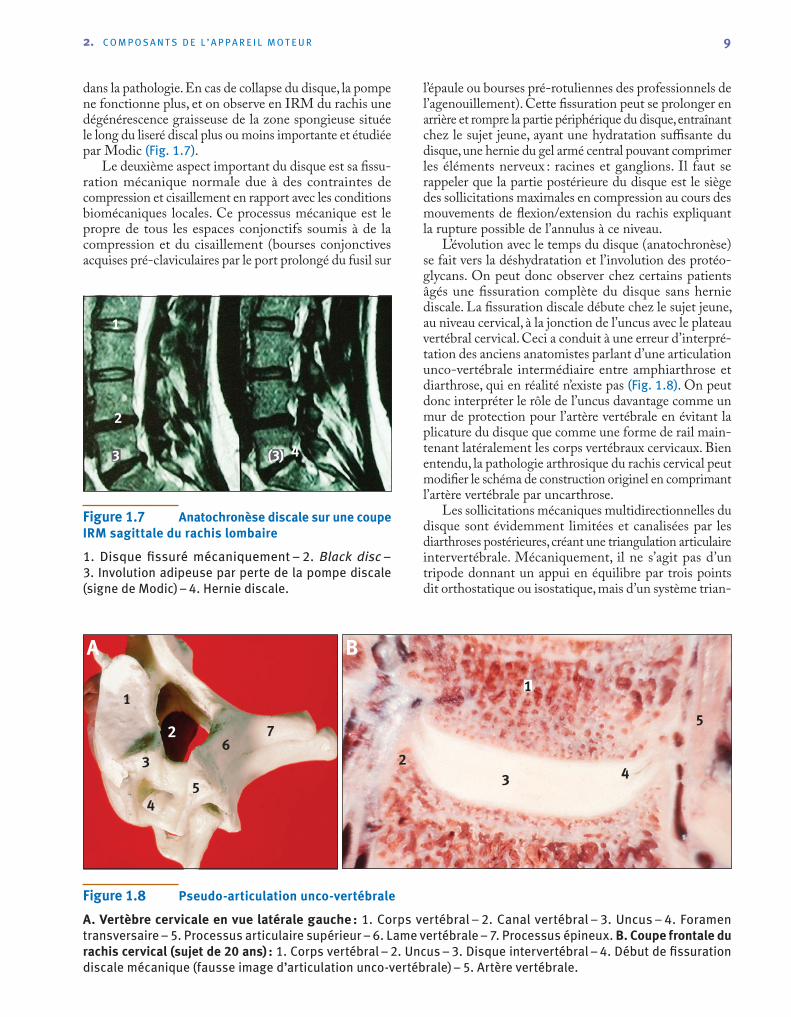
92. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R
dans la pathologie. En cas de collapse du disque, la pompe ne fonctionne plus, et on observe en IRM du rachis une dégénérescence graisseuse de la zone spongieuse située le long du liseré discal plus ou moins importante et étudiée par Modic (Fig . 1 .7).
Le deuxième aspect important du disque est sa fissu-ration mécanique normale due à des contraintes de compression et cisaillement en rapport avec les conditions biomécaniques locales. Ce processus mécanique est le propre de tous les espaces conjonctifs soumis à de la compression et du cisaillement (bourses conjonctives acquises pré-claviculaires par le port prolongé du fusil sur
Figure 1.7 Anatochronèse discale sur une coupe IRM sagittale du rachis lombaire
1 . Disque fissuré mécaniquement – 2 . Black disc – 3 . Involution adipeuse par perte de la pompe discale (signe de Modic) – 4 . Hernie discale .
1
2
3 (3) 4
l’épaule ou bourses pré-rotuliennes des professionnels de l’agenouillement). Cette fissuration peut se prolonger en arrière et rompre la partie périphérique du disque, entraînant chez le sujet jeune, ayant une hydratation suffisante du disque, une hernie du gel armé central pouvant comprimer les éléments nerveux : racines et ganglions. Il faut se rappeler que la partie postérieure du disque est le siège des sollicitations maximales en compression au cours des mouvements de flexion/extension du rachis expliquant la rupture possible de l’annulus à ce niveau.
L’évolution avec le temps du disque (anatochronèse) se fait vers la déshydratation et l’involution des protéo-glycans. On peut donc observer chez certains patients âgés une fissuration complète du disque sans hernie discale. La fissuration discale débute chez le sujet jeune, au niveau cervical, à la jonction de l’uncus avec le plateau vertébral cervical. Ceci a conduit à une erreur d’interpré-tation des anciens anatomistes parlant d’une articulation unco-vertébrale intermédiaire entre amphiarthrose et diarthrose, qui en réalité n’existe pas (Fig . 1 .8). On peut donc interpréter le rôle de l’uncus davantage comme un mur de protection pour l’artère vertébrale en évitant la plicature du disque que comme une forme de rail main-tenant latéralement les corps vertébraux cervicaux. Bien entendu, la pathologie arthrosique du rachis cervical peut modifier le schéma de construction originel en comprimant l’artère vertébrale par uncarthrose.
Les sollicitations mécaniques multidirectionnelles du disque sont évidemment limitées et canalisées par les diarthroses postérieures, créant une triangulation articulaire intervertébrale. Mécaniquement, il ne s’agit pas d’un tripode donnant un appui en équilibre par trois points dit orthostatique ou isostatique, mais d’un système trian-
Figure 1.8 Pseudo-articulation unco-vertébrale
A. Vertèbre cervicale en vue latérale gauche : 1 . Corps vertébral – 2 . Canal vertébral – 3 . Uncus – 4 . Foramen transversaire – 5 . Processus articulaire supérieur – 6 . Lame vertébrale – 7 . Processus épineux . B. Coupe frontale du rachis cervical (sujet de 20 ans) : 1 . Corps vertébral – 2 . Uncus – 3 . Disque intervertébral – 4 . Début de fissuration discale mécanique (fausse image d’articulation uncovertébrale) – 5 . Artère vertébrale .
6
1
7
1
45
33 4
5
2
2
A B

10 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
gulaire hyperstatique, c’est-à-dire non géométriquement calculable. La forme des processus articulaires postérieurs est variable selon les étages rachidiens et intervient for-tement dans la limitation ou mieux l’orientation des mouvements intervertébraux :• à l’étage cervical de grande mobilité, les surfaces arti-
culaires sont planes et circulaires regardant en haut et en arrière, et formant une colonne cylindrique ;
• à l’étage dorsal, elles sont également planes mais plus inclinées vers l’arrière et l’extérieur. Leur voisinage avec l’articulation costo-vertébrale double : tête costale appuyée sur le corps et tubérosité sur le processus transverse, limite beaucoup les mouvements de rotation axiale en laissant néanmoins une certaine amplitude pour la flexion/extension ; et
• à l’étage lombaire, le problème mécanique est de limiter le cisaillement horizontal tout en autorisant flexion, extension, latéralité et rotation axiale. C’est pourquoi le processus articulaire prend la forme d’un segment de cylindre vertical congruent, formant une articulation de type trochoïde avec une zone d’appui surtout antérieure. Les deux interlignes s’inscrivent sur une coupe horizontale dans un cercle, ce qui rend possible la rotation axiale. L5 en appui oblique sur
S1 a des facettes postérieures larges avec une orien-tation à 45° sur une coupe horizontale, ce qui augmente le rayon de courbure du cercle décrit précédemment permettant une légère rotation axiale, mais surtout bloquant le glissement antéro-postérieur. Celui-ci toutefois peut se voir en pathologie sous forme d’un listhésis antérieur ou postérieur.Pour être complet, il faut ajouter que les mouvements
du rachis lombaire sont canalisés par les facettes posté-rieures et limités par la capsule articulaire résistante et fixée au plus près de l’interligne. On peut voir également sur le pourtour de l’articulation une formation synoviale qui comble l’espace, en forme de ménisque, mais en réalité qui n’en est pas un parce que constitué uniquement de tissu synovial sans renforcement fibreux ou cartilagineux. Quand le disque intervertébral fissuré et déshydraté se collapse, le jeu des articulaires postérieures devient limité, pouvant générer des douleurs spécifiques par distension capsulaire, que l’on peut atténuer par infiltration. De même, les processus épineux dans ce cas de collapse discal viennent au contact, ce qui peut aboutir par friction à une fissuration mécanique du système fibreux interposé, qui peut créer une douleur réveillée à la palpation des processus épineux au travers de la peau (Fig . 1 .9) .
2
23
3
4
4
5
1 1A CB
Figure 1.9 Coupes sérielles du processus épineux de l’arrière vers l’avant
A : Délamination du tissu fibreux interépineux par friction mécanique due au collapse discal (flèche noire) . B : 1 . Lame vertébrale – 2 . Coussinet adipeux – 3 . Processus épineux – 4 . Faisceau court épineux du multifidus – 5 . Faisceau long épineux du multifidus . C : 1 . Processus articulaire supérieur – 2 . Pédicule postérieur – 3 . Lame vertébrale (image du « petit chien ») – 4 . Articulation zygapophysaire postérieure .

112. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R
d. Les diarthrosesElles se caractérisent par un contact direct entre les
pièces squelettiques qui imposent une interface particulière autorisant le glissement. Le tissu cartilagineux répond bien à cette fonction. Il n’a pas de vaisseaux sanguins et est formé par une substance fondamentale, résistante et souple, au sein de laquelle se trouvent des chondrocytes. C’est le joint idéal d’étalement des contraintes et de l’alignement des isostatiques, ou lignes de force. L’usure normale ou accélérée de ce joint fait la plus grande partie de la pathologie articulaire. L’absence de vaisseaux impose une nutrition par du liquide interposé dont les caracté-ristiques de viscosité favorisent la glissance des surfaces articulaires. Le mouvement des articles reste indispensable à la pénétration dynamique du liquide dans la couche superficielle du cartilage. Ce liquide synovial formé par des complexes protéiniques hyaluronates est sécrété à partir du sang par la membrane synoviale comportant des plis et des villosités [18–21].
Un des problèmes sémantiques est la notion de glis-sement et de roulement. Le glissement est comparable au freinage brutal d’une automobile qui déplace le même secteur de contact sur une bande de terrain. Le roulement au contraire oppose point par point le déplacement d’une partie sur l’autre. Il y a fréquemment combinaison des deux types de mouvements en fonction de la synthèse articulaire et aussi des dysfonctionnements articulaires.
La mobilité des diarthroses est conditionnée par deux facteurs. En premier lieu, par la forme des surfaces articulaires et leur rapport réciproque.• La jonction de deux segments de sphère permet
3 degrés de liberté (DL), comme les énarthroses de l’épaule ou la hanche.
• Deux cylindres ou deux segments de cylindre à 1 ou 2 DL, comme les trochoïdes de la radio-cubitale ou de l’atlanto-axoïdienne.
• Deux cylindres courbés, comme les condyliennes de la radio-carpienne.
• Deux poulies à gorge centrale à 1 DL, comme la trochlée huméro-cubitale.
• Deux segments plats avec des DL non matérialisés, comme les arthrodies des processus articulaires pos-térieurs cervicaux.Des surfaces faiblement concordantes (petite surface
d’un côté et grande de l’autre, comme dans l’articulation scapulo-humérale) augmentent la mobilité par diminution de la congruence. En second lieu, les moyens de synthèse des pièces squelettiques conditionnent beaucoup les amplitudes articulaires.• La capsule articulaire est un sac fibreux, plus ou moins
serré, qui se fixe sur la bordure du cartilage articulaire et enferme la membrane synoviale. Elle contient des mécanorécepteurs qui n’ont pas un rôle important dans la perception des mouvements.
• Les ligaments sont des bandelettes fibreuses inexten-sibles qui limitent les mouvements et sont placés soit sur la capsule en la renforçant (ligaments capsulaires
ou intracapsulaires), soit en dehors de la capsule et séparés par un espace (ligaments extracapsulaires). Certains peuvent être à la fois extrasynovial et intra-capsulaire, comme les ligaments croisés du genou ou le ligament rond de la tête fémorale. Un seul ligament est réellement élastique, le ligament jaune qui unit les lames vertébrales et donne un amortissement élastique des mouvements de flexion. A ces moyens de conten-tion passifs, il faut insister sur l’importance des éléments musculaires péri-articulaires qui sont de vrais ligaments actifs, comme par exemple le muscle piriforme à la hanche, le muscle poplité au genou ou le muscle anconé au coude.
• Il faut également insister sur le rôle mécanique impor-tant des tendons péri-articulaires qui passent en pont au-dessus d’une articulation, en la stabilisant quand leurs muscles sont contractés, comme c’est le cas du poignet ou de la cheville. Toutes ces structures peuvent être étirées au-delà de leur limite normale de fonc-tionnement, ce qui crée une entorse avec son cortège de signes pathognomoniques : douleur et œdème, en rapport avec la richesse neurale des ligaments en mécanorécepteurs et en fibres végétatives.
2.3. Les muscles
Les muscles sont des actionneurs silencieux, visco-élastiques, non réversibles et non linéaires, qui n’ont pas leur équivalent dans l’industrie. Il y en a près de 600 dans le corps. Ils représentent environ 45 % du poids du corps et fournissent une force par leur capacité active de rac-courcissement qui se fait dans le même sens (non réversible) et ne peut excéder le tiers de la longueur, ce qui conditionne toute l’organisation des systèmes musculaires.
2.3.1. L’unité fonctionnelle : le myocyte Les myocytes se forment dans la période embryonnaire
par la fusion de plusieurs myoblastes. Après cette fusion, le myocyte ne se divise plus par mitose, ce qui explique que la croissance des muscles se fait plus par hypertrophie des myocytes que par hyperplasie. Certains myoblastes deviennent des cellules satellites qui gardent leur capacité de division et peuvent éventuellement intervenir dans la régénération des myocytes. Ceux-ci comprennent des myofibrilles (Fig . 1 .10) avec une structure complexe de sarcomères formés de deux bandes, sombre et claire (Fig . 1 .11), justifiant le nom de fibre musculaire striée.
Ils se groupent en faisceaux. Les protéines musculaires sont nombreuses et peuvent se ranger en trois groupes: les protéines contractiles, actine (myofilaments fins) et myosine (myofilaments épais), les protéines régulatrices jouant le rôle d’interrupteur de la contraction musculaire (troponine et tropomyosine), et les protéines structurales garantissant la stabilité et l’élasticité des myofibrilles.
Il existe plusieurs types de fibres musculaires avec des caractéristiques métaboliques particulières répondant aux besoins d’efforts prolongés ou rapides :
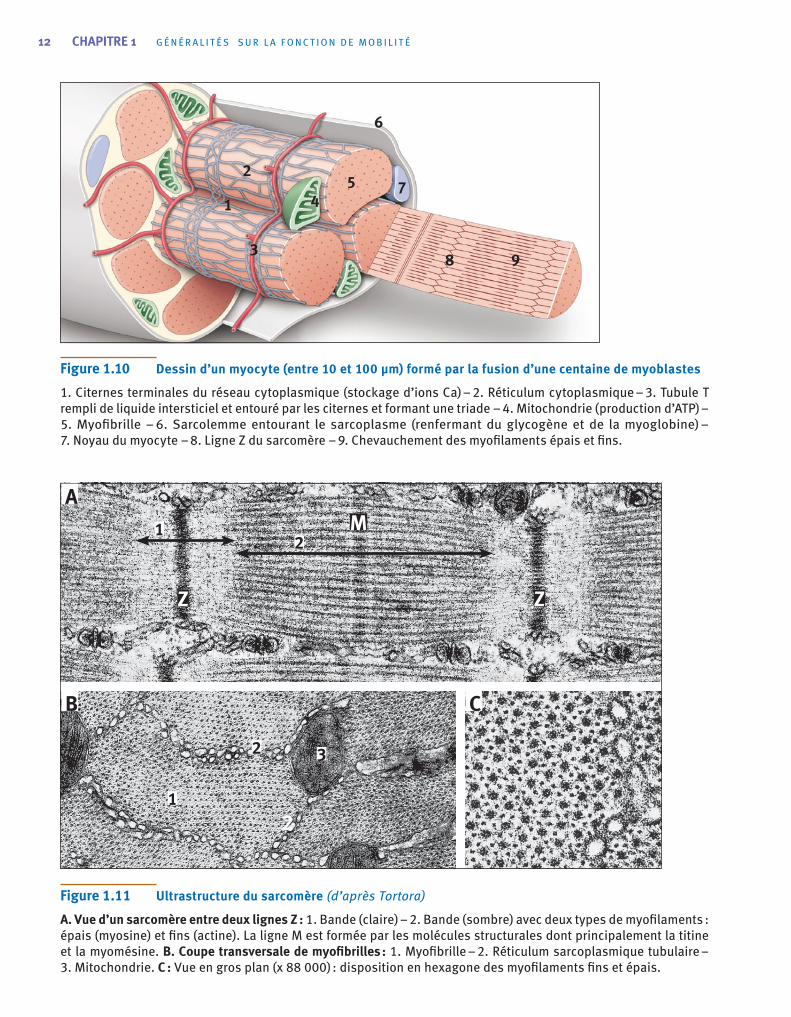
12 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
Figure 1.10 Dessin d’un myocyte (entre 10 et 100 µm) formé par la fusion d’une centaine de myoblastes
1 . Citernes terminales du réseau cytoplasmique (stockage d’ions Ca) – 2 . Réticulum cytoplasmique – 3 . Tubule T rempli de liquide intersticiel et entouré par les citernes et formant une triade – 4 . Mitochondrie (production d’ATP) – 5 . Myofibrille – 6 . Sarcolemme entourant le sarcoplasme (renfermant du glycogène et de la myoglobine) – 7 . Noyau du myocyte – 8 . Ligne Z du sarcomère – 9 . Chevauchement des myofilaments épais et fins .
Figure 1.11 Ultrastructure du sarcomère (d’après Tortora)
A. Vue d’un sarcomère entre deux lignes Z : 1 . Bande (claire) – 2 . Bande (sombre) avec deux types de myofilaments : épais (myosine) et fins (actine) . La ligne M est formée par les molécules structurales dont principalement la titine et la myomésine . B. Coupe transversale de myofibrilles : 1 . Myofibrille – 2 . Réticulum sarcoplasmique tubulaire – 3 . Mitochondrie . C : Vue en gros plan (x 88 000) : disposition en hexagone des myofilaments fins et épais .
1
2
3
Z
M
Z
45
6
7
8 9
2
1
1
2
32
A
B C

132. C O M P O S A N T S D E L ’ A P P A R E I L M O T E U R
• type I (rouge) : lentes, oxydatives, métabolisme aérobie, riche en mitochondries ;
• type IIA (blanche) : rapides, oxydatives-glycolytiques, métabolisme intermédiaire, riche en mitochondries ;
• type IIB (blanche) : rapides, glycolytiques, métabolisme anaérobie, faible densité mitochondriale Les fibres musculaires forment des paquets enrobés
dans une membrane fibreuse, l’epimysium. Ces paquets isolables par la dissection se groupent pour former un muscle déterminé, entouré de son aponévrose (fascia), qui lui donne une réalité anatomique, et terminé par un tendon de morphologie variable en fonction de son rôle et de sa position topographique. Les fibres tendineuses sont résistantes et inextensibles, donc peu élastiques. La fixation des fibres musculaires sur les tendons est un problème mécaniquement complexe pour garantir une résistance suffisante. La taille des tendons est en partie déterminée génétiquement avec un coefficient de sécurité théoriquement suffisant. Certaines ruptures tendineuses, en particulier celle du tendon d’Achille, peuvent survenir en cas de surdéveloppement musculaire chez un sujet avec un profil génétique à petit tendon. Ce phénomène est en partie comparable au diastème dentaire inter incisif de sujets ayant hérité d’un côté parental d’une mâchoire forte et de l’autre côté de dents petites. L’inverse peut se voir aussi avec dents volumineuses et petite mâchoire, entraînant des chevauchements et rotations dentaires.
2.3.2. L’architecture musculaire interne fonctionnelle [23]
Le muscle, à partir de son principe de fonctionnement par raccourcissement actif, peut adopter différentes architectures qui vont permettre une grande souplesse de motorisation. Il y a en général des extrémités tendineuses (chefs) qui permettent de définir des muscles fusiformes, à deux chefs (biceps), à trois chefs (triceps) ou quatre chefs (quadriceps). Au lieu d’un tendon sensiblement cylindrique, on peut trouver une lame tendineuse plate, recouverte elle-même par une aponévrose fibreuse comme dans les muscles larges de l’abdomen (muscle oblique externe et fascia de Cooper). Le muscle peut être trian-gulaire avec concentration des fibres musculaires sur un tendon pénétrant plus ou moins dans la masse musculaire, comme le muscle deltoïde. Des fibres tendineuses peuvent interrompre la continuité d’un muscle (muscle digastrique ou polygastrique). Les muscles peuvent activer une seule articulation (muscles monoarticulaires) ou plusieurs (muscles polyarticulaires), ce qui est important pour le contrôle des synergies musculaires.
2.3.3. Les principes de la construction fonctionnelle des groupes musculaires
Sur le plan de la mécanique, il n’y a que deux mou-vements possibles : la translation ou la rotation. Rares sont les mouvements articulaires en translation pure (arthrodies spinales cervicales ou dorsales). La plupart sont des rotations, qui cependant peuvent être associées
à des translations, comme c’est le cas par exemple du déplacement du scapulum sur la paroi thoracique. Il y a donc deux types de rotation :• la rotation centrée ou équilibrée par action d’un couple
musculaire de rotation (deux composantes musculaires de sens opposé, comme dans la rotation de la tête par l’action synergique hétéro-latérale du sterno-cléïdo-mastoïdien et des splénius, avec toutefois une com-posante de compression verticale due à l’obliquité nécessaire de ces muscles, ou comme la pro-supination du radius par le couple biceps/supinateur) ; et
• la rotation sur appui osseux avec un seul muscle et une surface articulaire courbe absorbant les contraintes de compression dans la rotation, comme par exemple la flexion de l’avant-bras sur le bras. Certaines arti-culations condyliennes ont une surface articulaire à deux rayons de courbure, et donc deux rotations selon deux axes perpendiculaires avec une troisième rotation combinant les deux axes, qui est dite à axe instantané de rotation. C’est aussi le cas des cardans à deux axes matérialisés et un troisième combiné, comme par exemple dans le cardan occipito-cervical.S’agissant des mouvements segmentaires, on peut
distinguer les mouvements de flexion-extension, d’abduc-tion-adduction et de rotation axiale, avec pour chacun d’eux un plan de construction logique compte tenu des caractéristiques des actionneurs.
a. Les mouvements de flexion du coude, de la hanche et du genouIl est intéressant de rappeler que la contrainte technique
de la limitation du raccourcissement actif d’un muscle au tiers de sa longueur interdit d’utiliser le muscle dans les meilleures conditions techniques d’un bras de levier de la puissance maximum, qui serait l’insertion du muscle sur l’extrémité distale du segment à fléchir (par exemple, sur le poignet pour la flexion de l’avant bras sur le bras au MS et du bassin sur la cheville pour la flexion du genou sur le genou pour la hanche, et la cheville au MI). Il faut donc rapprocher l’insertion distale de l’axe articulaire de rotation ce qui permet de gagner en raccourcissement, mais de perdre en puissance (ce qui a aussi l’avantage de ne pas construire une aile). Ce faisant, une résistance exercée sur l’extrémité du levier dispose d’un bras de levier de la puissance maximum, ce qui met l’action musculaire dans une position difficile. La solution originale est donc d’associer à une première composante musculaire, com-binant un muscle polyarticulaire à un muscle monoarti-culaire, puis une seconde, et de la faire se contracter automatiquement de façon réflexe contre résistance en donnant le supplément de force nécessaire et en respectant un principe d’économie.• Pour la flexion du coude, la première composante est
formée par le biceps polyarticulaire et le brachial monoarticulaire, et la deuxième composante par l’huméro-stylo-radial ou brachio-radial symétrique de la première composante et qui ne se contracte (ce

14 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
qu’on peut facilement vérifier sur soi) uniquement en cas de résistance appliquée sur l’avant bras.
• Pour la flexion de la hanche, la première composante est formée par l’ilio-psoas (mono- et poly-articulaire) et la seconde par le droit fémoral et le sartorius.
• Pour la flexion du genou, la première composante, polyarticulaire et monoarticulaire vient des ischio-jambiers et du court biceps, la deuxième de la partie polyarticulaire du triceps sural (les jumeaux).Ce réflexe de contraction contre résistance de la
deuxième composante de flexion n’a jamais été étudié avec beaucoup de précision. Il est bouclé au niveau de la moelle et disparaît en cas d’atteinte médullaire du segment correspondant. Il est la marque d’une grande intelligence d’organisation et d’une recherche d’optimisation en fonction des contraintes techniques.
b. Les mouvements d’extensionIls sont couplés avec la flexion et souvent moins
puissants. Mais au coude et au genou, ils sont placés sous la dépendance de deux muscles puissants : le triceps brachial (mono- et poly-articulaire) et le quadriceps, dont le problème dans la locomotion est la nécessaire direction de sa force dans l’axe de la jambe. Ceci justifie la présence de la rotule (le sésamoïde du quadriceps) guidée dans son déplacement par la trochlée fémorale, et bridée latéralement par des ailerons fibreux. De ce fait, les désaxassions de la rotule sont sources de dysfonctionnements du genou.
c. Les mouvements d’abduction/adductionIls se situent dans un plan frontal. L’exemple le plus
démonstratif est l’abduction du bras. Elle se fait par le muscle deltoïde. Mais se retrouve alors le problème du raccourcissement limité des muscles. En effet, le deltoïde, raccourci du tiers de sa longueur en contraction maximale, ne peut arriver à une abduction du bras qu’à l’horizontale. La solution mécanique, pour aller au-delà et mettre la main en l’air au dessus de la tête, est de basculer le scapulum qui porte l’humérus. Ceci implique la « libération » du scapulum qui n’a plus d’attache avec le squelette axial que par l’articulation sterno-claviculaire. La bascule du scapulum est assurée par le trapèze (muscle de l’épaule et non de la tête), fixé sur l’épine du scapulum qui joue le rôle de levier et par le serratus antérieur (grand dentelé) qui pousse vers l’avant le bord médial du scapulum. Une paralysie du trapèze ne permet pas une abduction à l’horizontale due au ballant du membre supérieur et à l’absence de bascule. Le contraire du mouvement de bascule est la contrebascule de l’omoplate, exécutée par le rhomboïde qui ramène le scapulum médialement, et le petit pectoral qui abaisse la ceinture scapulaire.
À cela s’ajoute l’adduction active du membre supérieur assurée par une très puissante sangle d’adduction, regrou-pant le grand pectoral, le grand rond et le grand dorsal (les trois grands). On peut se demander pourquoi il existe une sangle aussi puissante dont l’un des actionneurs musculaires se fixe jusqu’à la région lombo-pelvienne.
La réponse est dans la nécessité du grimper qui consiste à soulever le corps entier à partir d’une prise manuelle au-dessus de la tête (et non comme une réminiscence de la vie arboricole de nos prétendus cousins).
Au membre inférieur, l’abduction est fonctionnellement intéressante par la possibilité d’ouvrir le compas des deux membres inférieurs pour accéder au périnée. Mais l’action la plus intéressante mécaniquement est la stabilisation latérale du bassin, et donc du tronc, dans la station sur un pied ou dans la phase d’appui monopodal de la marche. Ceci peut se faire par l’action combinée du moyen et petit fessier et du tenseur du fascia lata, qui crée une rotation interne du membre inférieur le pied libre de son appui ou une rotation du bassin avec fixation latérale responsable du pas pelvien. L’adduction a la fonction inverse de protection et sauvegarde du périnée (custodes virginitatis) et aussi de la stabilisation médiale du bassin.
d. Les rotations axialesElles se font, comme vu précédemment, selon trois
modalités : • par rotation centrée et équilibrée par couple de rota-
tion comme dans la prono-supination de la main grâce à la double trochoïde inversée du radius sur l’ulna, activée par le couple biceps (fixé sur le radius)/court supinateur (attaché sur l’ulna) ;
• par rotation axiale non équilibrée de l’humérus par un couple musculaire à composante antérieure (infra-scapulaire) et postérieure (infra-épineux et grand dorsal), ou dans la rotation en synergie hétéro latérale de la tête (SCM/splenius capitis et cervicis) et du tronc (oblique externe/oblique interne) ; et
• par rotation sur appui osseux au niveau du cotyle pelvien pour la rotation du membre inférieur, interne par le moyen et petit fessier et externe par l’ensemble : piriforme, obturateur interne, jumeaux, carré fémoral.Au total, dans ces constructions de groupes musculaires,
on peut donc parler de synergies, qui associent plusieurs muscles différents pour une action complémentaire, soit du même côté :• homolatérales, comme par exemple sterno-cléïdo-
mastoïdien, splenius, scalènes, élévateur de la scapula droits pour une inclinaison latérale droite de la tête, soit des deux côtés ;
• hétéro-latérales, comme par exemple SCM du côté droit et splénius du côté gauche pour une rotation gauche de la tête ; et
• bilatérales, comme par exemple dans le redressement du tronc depuis la position couchée avec une synergie des SCM et des droits de l’abdomen.Il faut ajouter les synergies de fixation qui entraînent
la cocontraction des agonistes et des antagonistes d’un segment pour le bloquer en position ou pour exercer une poussée de tout le corps avec appui manuel contre résistance. Le terme de synergies semble plus correct que celui de chaînes musculaires qui est souvent une construction mentale sans fondement physiologique sérieux. En effet,
153. C O M M A N D E E T C O N T R Ô L E M O T E U R
toutes ces synergies sont automatisées et non commandées volontairement de façon analytique. Leur mécanisme intime et leurs voies dans le système nerveux ne sont pas encore totalement claires et mériteraient une étude complémentaire. Ce qui est sûr, c est que le pilote de la machine pilote des mouvements et non des muscles, car il ne sent ses muscles que quand ils sont douloureux et de plus il n’a pas besoin de savoir qu’il a des muscles – ni a fortiori de connaître leurs noms – pour effectuer des tâches motrices complexes.
3. COMMANDE ET CONTRÔLE MOTEURLa commande motrice est dominée par deux notions
essentielles.D’une part le système moteur est d’une grande com-
plexité ce qui sous-tend le niveau élevé des performances observées. Ceci, compte tenu la plupart du temps de l’ignorance technique quasi-totale de l’utilisateur de la machine, impose une commande simplifiée avec une exécution compliquée, et donc un haut niveau d’automa-tisation des processus qui reste le maître-mot de l’orga-nisation cérébrale. Celle-ci fait que, devant l’apparente simplicité de la commande des tâches motrices, la tendance est de sous-estimer leur difficulté de réalisation et en cas de dysfonctionnements, de ne pas toujours comprendre facilement pour un patient donné, pourquoi le rétablis-sement d’une fonction peut ne pas être possible. C’est le cas en particulier pour les paralysies.
Vu avec l’œil d’un ingénieur, on peut saisir la nécessité technique des automatismes et servo-mécanismes que l’on peut décrire dans les différents niveaux d’intégration neurale, tout au long des longues voies de conduction ascendantes, de la périphérie vers les centres encéphaliques, et des centres vers la périphérie, jusqu’aux multiples action neurs qui doivent être choisis avec précision pour une tâche déterminée.
On ne peut cependant pas échapper à une tendance réductionniste pour en exposer le fonctionnement, en se rappelant cependant que plusieurs systèmes neuronaux très différents peuvent fonctionner en même temps dans le cerveau grâce à cette architecture de type parallèle et non séquentielle, qui caractérise l’activité cérébrale. Aussi est-il impossible d’avoir une perception holistique de ce vaste réseau neuronal interconnecté.
D’autre part, compte tenu de cela, le contrôle des fonctions motrices est de type hétérarchique, c’est-à-dire avec des interactions multiples entre les niveaux, sans une centralisation de type hiérarchique. Ceci implique l’invention d’une quantité énorme de capteurs et un câblage intelligent, dont l’une des caractéristiques essentielles est l’orientation sélective des influx au travers d’un réseau discontinu avec des portes, où la clé est biochimique et donc précise. Ceci donne aux neurotransmetteurs une valeur considérable. Les liaisons synaptiques sont, grâce au microscope élec-tronique et à la neurochimie moderne, bien connues. Deux
processus fondamentaux en assurent la gestion : ou la facilitation ou l’inhibition. Nous avons certes du mal à percevoir, ou même d’imaginer, les milliards de neurones qui travaillent ensemble avec un succès technique que nous pouvons cependant apprécier constamment.
Un certain nombre de problèmes techniques doivent être expliqués : la commande proportionnelle, la régulation motrice et le contrôle central.
3.1. La commande proportionnelleIl y a deux types de commande : tout ou rien et
proportionnelle. Le premier type consiste par exemple à allumer la lumière dans une pièce. Les fibres musculaires obéissent à ce principe : elles se contractent ou non. Le deuxième type est la possibilité d’une proportionnalité dans la commande en fonction des besoins. C’est le cas du muscle qui dispose d’un certain nombre de fibres musculaires qui peuvent donner par leur mise en activité une force minimale ou maximale. Les fibres nerveuses motrices issues des motoneurones, par leurs plaques motrices réalisant une jonction neuromus culaire, tiennent sous leur dépendance un certain nombre de fibres mus-culaires, représentant les unités motrices qui peuvent être « recrutées » pour accomplir un effort déterminé. Elles sont donc les incréments de force de la commande proportionnelle.
L’intelligence du système est de ne pas donner à toutes les unités motrices la même valeur fonctionnelle. L’incrément de force utilisable pour doser la force dans un muscle strié oculaire n’est pas le même que celui du muscle grand fessier [28]. Dans le premier cas, l’unité motrice est de l’ordre de 25 fibres, et dans l’autre de 6 000, expliquant la variation de finesse de contrôle dans le système musculaire. Il apparaît donc clairement que des capteurs « d’effort à fournir » et « d’effort fourni » devront être placés dans l’actionneur musculaire pour assurer la gestion des unités motrices.
3.2. La régulation motriceOn distingue, dans la commande et le contrôle, deux
types possibles de régulation.• Le premier type est dit en boucle ouverte, et dans ce
cas la commande d’un effecteur ne dépend pas du mode d’exécution qui est indépendant des conditions locales d’environnement. Par exemple, si un piéton passe sans regarder devant un véhicule en déplacement, le pilote de celui-ci donne un coup de frein brutal sans aucun dosage proportionnel « en boucle ouverte».
• Le second type est dit en boucle fermée, c’est-à-dire que la commande est directement liée à l’exécution et peut être modifiée en fonction de facteurs extérieurs ou intérieurs à l’effecteur. Ceci implique donc que soient mis au niveau de l’effecteur des systèmes de renseignement appelés capteurs qui renvoient sur la commande les informations permettant d’ajuster celle-ci dans un mode adaptatif.
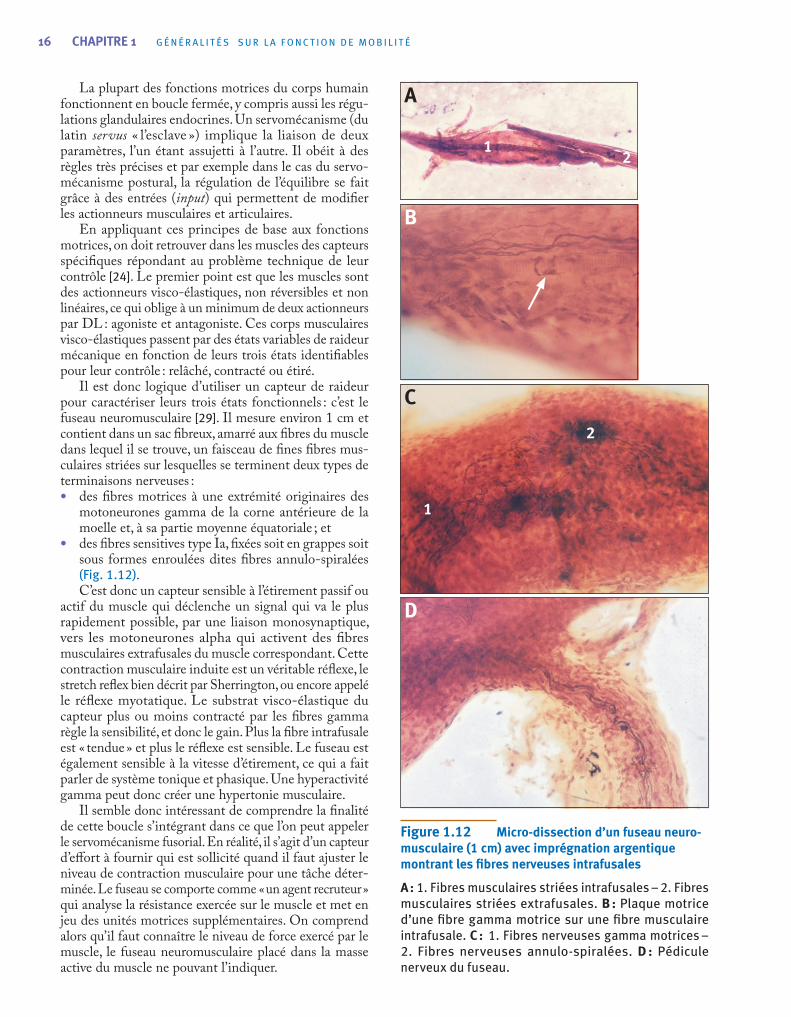
16 CHAPITRE 1 G É N É R A L I T É S S U R L A F O N C T I O N D E M O B I L I T É
La plupart des fonctions motrices du corps humain fonctionnent en boucle fermée, y compris aussi les régu-lations glandulaires endocrines. Un servomécanisme (du latin servus « l’esclave ») implique la liaison de deux paramètres, l’un étant assujetti à l’autre. Il obéit à des règles très précises et par exemple dans le cas du servo-mécanisme postural, la régulation de l’équilibre se fait grâce à des entrées (input) qui permettent de modifier les actionneurs musculaires et articulaires.
En appliquant ces principes de base aux fonctions motrices, on doit retrouver dans les muscles des capteurs spécifiques répondant au problème technique de leur contrôle [24]. Le premier point est que les muscles sont des actionneurs visco-élastiques, non réversibles et non linéaires, ce qui oblige à un minimum de deux actionneurs par DL : agoniste et antagoniste. Ces corps musculaires visco-élastiques passent par des états variables de raideur mécanique en fonction de leurs trois états identifiables pour leur contrôle : relâché, contracté ou étiré.
Il est donc logique d’utiliser un capteur de raideur pour caractériser leurs trois états fonctionnels : c’est le fuseau neuromusculaire [29]. Il mesure environ 1 cm et contient dans un sac fibreux, amarré aux fibres du muscle dans lequel il se trouve, un faisceau de fines fibres mus-culaires striées sur lesquelles se terminent deux types de terminaisons nerveuses :• des fibres motrices à une extrémité originaires des
motoneurones gamma de la corne antérieure de la moelle et, à sa partie moyenne équatoriale ; et
• des fibres sensitives type Ia, fixées soit en grappes soit sous formes enroulées dites fibres annulo-spiralées (Fig . 1 .12).C’est donc un capteur sensible à l’étirement passif ou
actif du muscle qui déclenche un signal qui va le plus rapidement possible, par une liaison monosynaptique, vers les motoneurones alpha qui activent des fibres musculaires extrafusales du muscle correspondant. Cette contraction musculaire induite est un véritable réflexe, le stretch reflex bien décrit par Sherrington, ou encore appelé le réflexe myotatique. Le substrat visco-élastique du capteur plus ou moins contracté par les fibres gamma règle la sensibilité, et donc le gain. Plus la fibre intra fusale est « tendue » et plus le réflexe est sensible. Le fuseau est également sensible à la vitesse d’étirement, ce qui a fait parler de système tonique et phasique. Une hyperactivité gamma peut donc créer une hypertonie musculaire.
Il semble donc intéressant de comprendre la finalité de cette boucle s’intégrant dans ce que l’on peut appeler le servomécanisme fusorial. En réalité, il s’agit d’un capteur d’effort à fournir qui est sollicité quand il faut ajuster le niveau de contraction musculaire pour une tâche déter-minée. Le fuseau se comporte comme « un agent recruteur » qui analyse la résistance exercée sur le muscle et met en jeu des unités motrices supplémentaires. On comprend alors qu’il faut connaître le niveau de force exercé par le muscle, le fuseau neuromusculaire placé dans la masse active du muscle ne pouvant l’indiquer.
2
1
1
2
Figure 1.12 Micro-dissection d’un fuseau neuro - musculaire (1 cm) avec imprégnation argentique montrant les fibres nerveuses intrafusales
A : 1 . Fibres musculaires striées intrafusales – 2 . Fibres musculaires striées extrafusales . B : Plaque motrice d’une fibre gamma motrice sur une fibre musculaire intra fusale . C : 1 . Fibres nerveuses gamma motrices – 2 . Fibres nerveuses annulospiralées . D : Pédicule nerveux du fuseau .
A
B
C
D
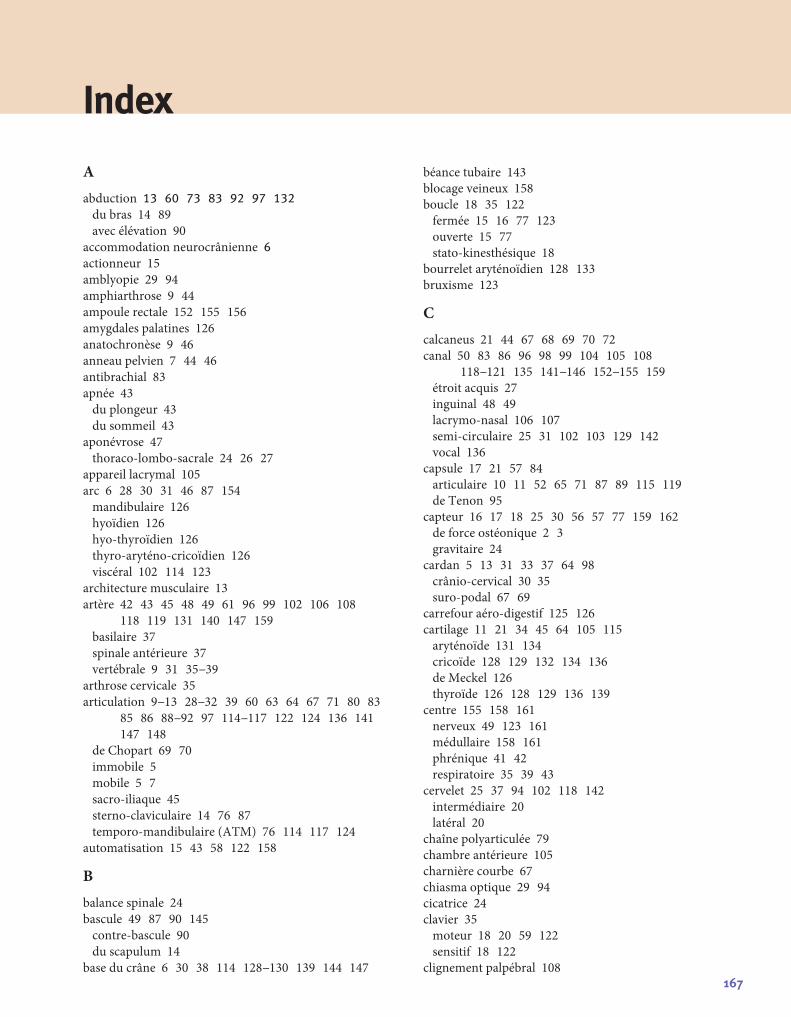
Aabduction 13 60 73 83 92 97 132
du bras 14 89avec élévation 90
accommodation neurocrânienne 6actionneur 15amblyopie 29 94amphiarthrose 9 44ampoule rectale 152 155 156amygdales palatines 126anatochronèse 9 46anneau pelvien 7 44 46antibrachial 83apnée 43
du plongeur 43du sommeil 43
aponévrose 47thoraco-lombo-sacrale 24 26 27
appareil lacrymal 105arc 6 28 30 31 46 87 154
mandibulaire 126hyoïdien 126hyo-thyroïdien 126thyro-aryténo-cricoïdien 126viscéral 102 114 123
architecture musculaire 13artère 42 43 45 48 49 61 96 99 102 106 108
118 119 131 140 147 159basilaire 37spinale antérieure 37vertébrale 9 31 35–39
arthrose cervicale 35articulation 9–13 28–32 39 60 63 64 67 71 80 83
85 86 88–92 97 114–117 122 124 136 141 147 148
de Chopart 69 70immobile 5 mobile 5 7sacro-iliaque 45sterno-claviculaire 14 76 87temporo-mandibulaire (ATM) 76 114 117 124
automatisation 15 43 58 122 158
Bbalance spinale 24bascule 49 87 90 145
contre-bascule 90du scapulum 14
base du crâne 6 30 38 114 128–130 139 144 147
Index
béance tubaire 143blocage veineux 158boucle 18 35 122
fermée 15 16 77 123ouverte 15 77stato-kinesthésique 18
bourrelet aryténoïdien 128 133bruxisme 123
Ccalcaneus 21 44 67 68 69 70 72canal 50 83 86 96 98 99 104 105 108
118–121 135 141–146 152–155 159étroit acquis 27inguinal 48 49lacrymo-nasal 106 107semi-circulaire 25 31 102 103 129 142vocal 136
capsule 17 21 57 84articulaire 10 11 52 65 71 87 89 115 119de Tenon 95
capteur 16 17 18 25 30 56 57 77 159 162de force ostéonique 2 3gravitaire 24
cardan 5 13 31 33 37 64 98crânio-cervical 30 35suro-podal 67 69
carrefour aéro-digestif 125 126cartilage 11 21 34 45 64 105 115
aryténoïde 131 134cricoïde 128 129 132 134 136de Meckel 126thyroïde 126 128 129 136 139
centre 155 158 161nerveux 49 123 161médullaire 158 161phrénique 41 42respiratoire 35 39 43
cervelet 25 37 94 102 118 142intermédiaire 20latéral 20
chaîne polyarticulée 79chambre antérieure 105charnière courbe 67chiasma optique 29 94cicatrice 24clavier 35
moteur 18 20 59 122sensitif 18 122
clignement palpébral 108167
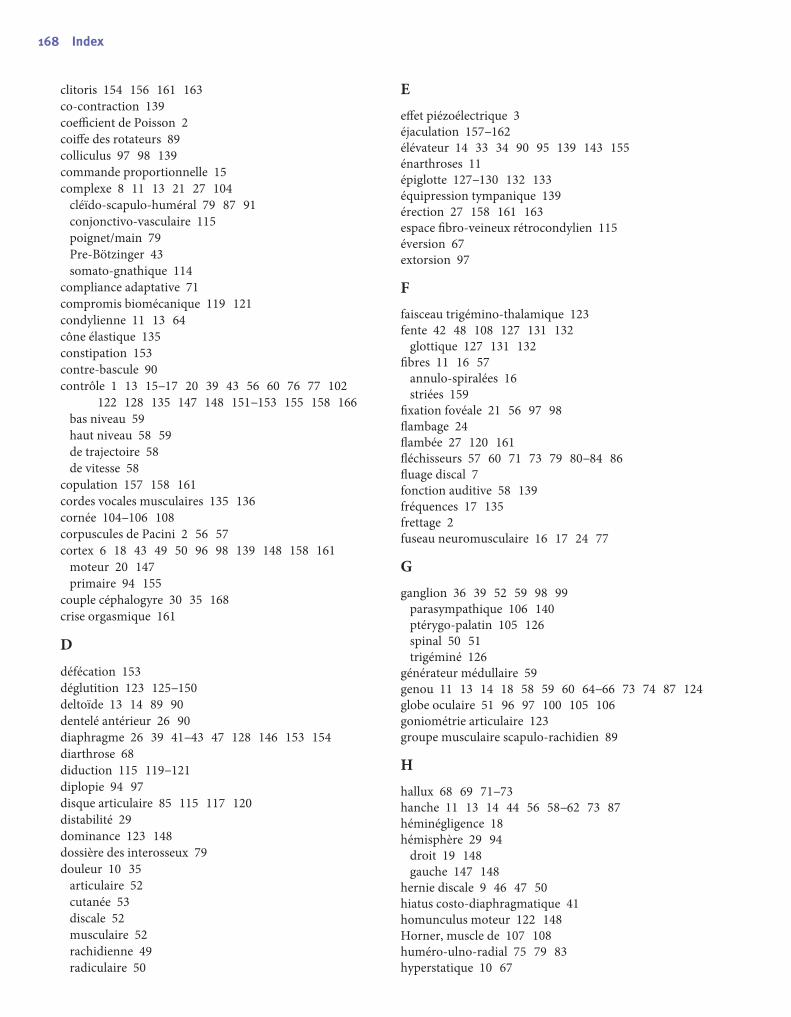
clitoris 154 156 161 163co-contraction 139coefficient de Poisson 2coiffe des rotateurs 89colliculus 97 98 139commande proportionnelle 15complexe 8 11 13 21 27 104
cléïdo-scapulo-huméral 79 87 91conjonctivo-vasculaire 115poignet/main 79Pre-Bötzinger 43somato-gnathique 114
compliance adaptative 71compromis biomécanique 119 121condylienne 11 13 64cône élastique 135constipation 153contre-bascule 90contrôle 1 13 15–17 20 39 43 56 60 76 77 102
122 128 135 147 148 151–153 155 158 166bas niveau 59haut niveau 58 59de trajectoire 58de vitesse 58
copulation 157 158 161cordes vocales musculaires 135 136cornée 104–106 108corpuscules de Pacini 2 56 57cortex 6 18 43 49 50 96 98 139 148 158 161
moteur 20 147primaire 94 155
couple céphalogyre 30 35 168crise orgasmique 161
D
défécation 153déglutition 123 125–150deltoïde 13 14 89 90dentelé antérieur 26 90diaphragme 26 39 41–43 47 128 146 153 154diarthrose 68diduction 115 119–121diplopie 94 97disque articulaire 85 115 117 120distabilité 29dominance 123 148dossière des interosseux 79douleur 10 35
articulaire 52cutanée 53discale 52musculaire 52rachidienne 49radiculaire 50
Eeffet piézoélectrique 3éjaculation 157–162élévateur 14 33 34 90 95 139 143 155énarthroses 11épiglotte 127–130 132 133équipression tympanique 139érection 27 158 161 163espace fibro-veineux rétrocondylien 115éversion 67extorsion 97
Ffaisceau trigémino-thalamique 123fente 42 48 108 127 131 132
glottique 127 131 132fibres 11 16 57
annulo-spiralées 16striées 159
fixation fovéale 21 56 97 98flambage 24flambée 27 120 161fléchisseurs 57 60 71 73 79 80–84 86fluage discal 7fonction auditive 58 139fréquences 17 135frettage 2fuseau neuromusculaire 16 17 24 77
Gganglion 36 39 52 59 98 99
parasympathique 106 140ptérygo-palatin 105 126spinal 50 51trigéminé 126
générateur médullaire 59genou 11 13 14 18 58 59 60 64–66 73 74 87 124globe oculaire 51 96 97 100 105 106goniométrie articulaire 123groupe musculaire scapulo-rachidien 89
Hhallux 68 69 71–73hanche 11 13 14 44 56 58–62 73 87héminégligence 18hémisphère 29 94
droit 19 148gauche 147 148
hernie discale 9 46 47 50hiatus costo-diaphragmatique 41homunculus moteur 122 148Horner, muscle de 107 108huméro-ulno-radial 75 79 83hyperstatique 10 67
168 Index
169
Iinfraduction 97inhibition 15 29 50
maculaire 29intercuspidation 115 117 120interneurones 59intorsion 97inversion 44 67IRM 9 24 47 50 52 86 97 115 117 118 137 145
148 154 156
Jjonction 5 7 9 11 15 30 38 43 44 53 67 68 98
130 155humérus-ulna 83scapulo-humérale 87talo-calcanéenne 70
Kkératite trophique 106 108
Llame tendineuse 13 24 26 47 48 62 67 71 73 79
83 87tricipito-plantaire 73
langue 29 76 111 114 126–128 132 133 135 136 139 146–148
larynx 43 114 119 126 127 131–136 139 143 148fermeture 128musculature extrinsèque 136
latéralité 10 24 123 148latissimus dorsi 24–27 91ligament 24 28 31 32 34 48 53 61 62 65 71 72
83 84 87 89 106 126 128 131 134 141calcanéo-cuboïdien 70calcanéo-naviculaire 70jaune 11 27rétinaculaire 79 82triangulaire 79 81–83
ligne de référence axiale 24liquide 7 12 30 43 57 105 128 133 145
synovial 11listhésis 10locomotion bipède 56lombo-sacral 24 26 27
tendon 24 26 27losange tendineux dorsal 79
Mmacula 29 94 102macule utriculaire 24 102 103maladie de Ménière 30manipulation 76 90
marche 7 14 44 46 55–60 64 67 73 74 161cinématique 56 73 74 92
masséter 96 108 110 114 117 119–121 129 144massif carpien 83mécanique phonatoire 136Meckel, cartilage de 39 126 167médecine manuelle 50 53 54Ménière, maladie de 30ménisque 10 89 115–118miction 152 153 155mode d’articulation 136modèle robionique 17Modic 9 46module d’élasticité longitudinal 2motoneurones gamma 16mouvement 5 7 11 14 18 27 29 30 35 44 45 53
58–60 64 67 73 76 87 90 94 98 106 114 115 117 119 122 123 128
ATM 102 103 113–118 123 124 141muscle 11 15 16 21 22 38 42 53 57 60 62 65
71 73 77 79 83 84 86 91 92 100 124 128 132–138 147 150 152 153 156 159 160 163
de Horner 107 108deltoïde 13 14 89dentelé antérieur 26droit 61 63 95 154épi-épineux 44 58extenseur 81génio-glosse 121hyo-glosse 34 121 131ilio-costal 44large 90lombrical 17 82long dorsal 44masticateur 7 114 119 120 123 126multifidus 10 25 27 44mylo-hyoïdien 96 121 131oblique 13 35 47 48 49 90 95 97orbiculaire 106–108pronateur 87ptérygoïdien 114–119 121releveur de l’anus 154releveur du voile 139 144spino-appendiculaire 26stapédien 103supinateur 87temporal 95tenseur du tympan 141 146tenseur du voile 119 126 139 140 145tibial 68 69 70 72triangulaire 89 108
Nnerf
facial 17 102–106 108–110 114 123 126 146
170 Index
glossopharyngien 126 146hypoglosse 17 100 102 139 147phrénique 138pneumogastrique 126 156trijumeau 17 98 99 102 105 109 114 123 126
144 146trochléaire 97 99vague 109
neurocrâne 5noyau 6 19 43 98 108 123 124 146 154 158
géniculé latéral 94vestibulaire 20
nystagmographie 30nystagmus 30 98
Oolive inférieure 20 122organe de Golgi 17orgasme 157 158 160–162os hyoïde 114 126 128 131 134 139oscillateur 44
de la marche 59ventilatoire 43
ostéoblastes 2 5ostéopathie 7ouverture buccale 114 119 121
Pparoi abdominale 26 39 43 47 48 135pas pelvien 14 60 73pectoral 88 91
petit 14 90pharyngo-larynx 126 148phases de la marche 60phonation 18 19 114 115 123 125 126 128 130
132 134–144 146–148 150phonétique 135 136 145 146phrénique 138
centre 41 42nerf 42
pied 14 44 46 56–60 64 67 69–74 78 83 123 148pince myo-vertébrale 47plaisir orgasmique 161plexus 2 7 35 91 104 118 123 139
147 153–155 158brachial 34 77 79 88hypogastrique 156triangulaire 39 98 99 144
poche entoblastique 126point d’articulation 136pompe
discale 7 9 46lacrymale 108urétrale bulbo-spongieuse 159
posture
mandibulaire 113 122 123verticale 56 73 123
posturographie 56posturologie 30 56 123poutre
composite 44musculaire 146
processusarticulaire postérieur 27 35odontoïde 30
prono-supination 14 87protéoglycan 7ptérygoïdien 99
latéral 114–121 124 140 144 145médial 114 117–120 140 144
Rrachis lombal 26 27 44rangée du carpe
distale 83 85proximale 83 85
rebord palpébral 106récepteur
de Ruffini 18métabo- 18 52
réflexeano-rectal 153de toux 133myotatique 16 17 24 123 146stapédien 146
régulationmotrice 15osmotique 30respiratoire 43
réservoirs pelviens 43 47 152 155résonateurs supra-glottiques 135 136rétinaculaire 79 81 82rétinaculum 66 68 82 84
des fléchisseurs 83 86rhomboïde 88rideau palpébral 105 106 108robotique 17 76 122Romberg 56 73rotation
centrée 13 14sur appui 13 14
Ruffini, récepteurs de 18
Ssac lacrymal 106–108sangle 14 44 47 79 91 114 117 120 128 139 140
144 153sarcomère 12scapula 14 33 34 87 88–91scissure calcarine 94
171
semispinalis de la tête 35 90sens haptique 76séquence
de marche 58 59 73éjaculatoire 161
serratus antérieur 14servomécanisme
de la minéralisation osseuse 3fusorial 16 17œil/tête 23 29 30 98postural 16 24 56 57 123
sésamoïde rotulien 65sinus piriformes 132soufflerie sous-glottique 135spasticité 17sphincter 126 133
anal 159 161lisse 152 154 156strié 152–156 159 161
splanchnocrâne 5 6 126splenius 35 98
capitis 14 30 33 34cervicis 34 35
stabilisation latérale du bassin 14 60 73stabilométrie 56 73station
bipodale 57monopodale 56 57
stéréoscopie 29 94 95sterno-cléïdo-mastoïdien 13 14 30 34 90 134supraduction 97sustentaculum tali 67suture 5 6 7 97 102
crânienne 5 6symétrie mésaxonique 76symphyse pubienne 8 153 154synergie 44 47 90 139 146
bilatérale 120 121de fixation 14hétéro-latérale 48homo-latérale 30 35
systèmeantitorsion 87limbique 158
Ttalus 44 67 68 69 70télencéphale 6tendon lombo-sacral 24 26 27Tenon, capsule de 95tissu hématopoïétique 2tissu osseux
compact 2 21spongieux 2
transversaire épineux 27
trapèze 14 26 34 35 37 83 89 90 129 139triangles d’appui 67triangulaire 9 13 39 47 71 79 81 82 85 87 89 98
99 108 135 144 145trigone vésical 153trochlée 11 14 60 65 67 83 87trochoïde 10 14 60 67 87trompe auditive 118 121 126 139 140 143–145tympan 118
muscle tenseur 119 126 139–141 145 146typologie orgasmique 161
Uuncus 9 35unité motrice 15
Vventre
antérieur du digastrique 114 119 128 147postérieur 102 114 126 147
vertèbre intermédiaire 44vessie 63 154 155vestibule 103 104 129 134 142vestibulométrie 30vision panoramique 29voie corticospinale 20voile du palais 127 128 133 135 136 139 140 143
144 148
Zzone
bilaminaire 115 116glottique 135

Une approche originale de l’anatomie qui privilégie la compréhension des structures anatomiques à leur seule mémorisation.
Comprendre l’anatomieLa méthode d’approche compréhensive consiste, en premier lieu, à observer une fonction et à en identifier les problèmes techniques à résoudre pour sa réalisation et, en second lieu, à aller vers la solution anatomique pour la valider.Les déviations pathologiques doivent être bien comprises afin d’être traitées dans les meilleures conditions possibles. Cet ouvrage aborde donc les problèmes anatomiques dans une perspective bioméca-nique mettant l’accent sur la compréhension du fonctionnement des structures décrites. De nombreuses photographiesL’anatomie est une discipline rigoureuse qui nécessite de « voir » l’objet d’étude : notre corps. Ce livre contient un nombre important d’illustra-tions faites à partir de dissections ou de coupes anatomiques, permettant d’entrer progressivement dans la réalité anatomique. Le CD joint au livre donne la possibilité à l’étudiant de voir simultanément, d’une part l’illustra-tion annotée et légendée dans le livre, et d’autre part la même image mais sans annotations. Pour l’étudiant, ceci favorise la compréhension optimale de la notion traitée. Pour l’enseignant, cela permet l’enseignement ou le contrôle des connaissances d’après un matériel de qualité.
PublicsCe livre s’adresse à tous ceux qui sont des apôtres du mouvement et ont l’obligation de bien connaître les fonctions motrices du corps humain pour en traiter les déficiences et les déviations pathologiques :
Médecins et chirurgiens en toutes spécialités
Radiologues et manipulateurs radio
Kinésithérapeutes
Ergothérapeutes
Orthophonistes
Orthoptistes
Ostéopathes
Infirmiers
Pierre Rabischong s’est spécialisé en neuropsychiatrie. Il a été chef de travaux d’anatomie à l’Institut d’anatomie de Lausanne dirigé par le Professeur Georges Winckler. Agrégé des facultés de médecine en anatomie et organogenèse, il a été nommé à la faculté de médecine de Montpellier, où il fut professeur titulaire de la chaire d’anatomie, biologiste des hôpitaux, et chef du service d’explorations fonctionnelles de l’appareil moteur du CHU. Il est membre fondateur du Collège médical français des professeurs d’anatomie et a fait partie du Comité consultatif des universités (CCU). Il obtient en 1971 la création de l’Unité 103 de recherches biomécaniques de l’INSERM. Il a fondé le Centre Propara pour le traitement des lésions de la moelle épinière. Il est président et co-fondateur de l’ESEM (European Society for engineering and medicine), de l’ISCAS (International Society for computer aided surgery) et, à l’UNESCO, de la WABT (World Academy of biomedical technologies). Il a coordonné le projet EUREKA-CALIES et le projet SUAW (Stand up and walk) du programme BIOMED II de la CEE. Il est actuellement professeur émérite et doyen honoraire de la faculté de médecine de Montpellier.
Les « plus » Plus de 300 photographies
anatomiques en couleurs.
L’ensemble des fonctions motrices.
Un CD contenant toute la photothèque de l’ouvrage. 9 782353 272372www.deboeck.fr
ISBN : 978-2-35327-237-2ANAFONC
+
L’auteur
Conc
eptio
n gr
aphi
que
: Bap
tiste
Man
chon













![Sensibilité viscérale digestive - Inserm · 2019. 3. 20. · neuronal du nerf vague [ 4]. Les affé rences spinales cheminent dans les voies orthosympathiques assurant l'innervation](https://img.pdfslide.fr/doc/110x75/6145aed607bb162e665fd7e9/sensibilit-viscrale-digestive-inserm-2019-3-20-neuronal-du-nerf-vague.jpg)