Embed Size (px)
Citation preview

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
71
I. Introduction
Le terme de machine asynchrone ’’MAS’’ regroupe toutes les machines dont la vitesse de
rotation de l’arbre mécanique est différente de la vitesse de rotation du champ tournant. En
fait, le fonctionnement moteur de cette machine correspond au cas où elle transformerait
l’énergie électrique qu’elle absorbe en énergie mécanique rotationnelle. L’opération inverse
correspond au fonctionnement générateur. Entre autres, nous pouvons distinguer deux
principaux types de MAS :
- Les machines à induction où une des armatures (le rotor en général) n’est pas alimentée. Les
courants qui y circulent sont induits par l’autre armature.
- Les machines à collecteur (à double alimentation) où l’armature tournante est reliée au
réseau par un collecteur. Ceci permet d’apporter ou de prélever de la puissance du rotor sans
imposer la fréquence des courants dans celui-ci.
Bien que la MAS fut pendant très longtemps destinée principalement au fonctionnement
moteur. Le développement de l’électronique de puissance a permit de montrer les
performances très intéressantes de cette machine lorsqu’elle opère en génératrice.
II. Constitution de la machine asynchrone
La MAS à induction, fait appel à un principe simple de champs tournant qui lui permet un
fonctionnement sans contacts électriques glissants. Ceci conduit à une machine très robuste, à
l’entretien aisé, qui convient aujourd’hui très bien dans les applications en vitesse variable.
Dans ce programme, on se limite à étudier la machine à induction en fonctionnement moteur.
Ce dernier est composé d’une partie fixe dite ’’stator’’ et une partie tournante dite ’’rotor’’.
II. 1. Stator
Le stator des moteurs asynchrones triphasés est le même que celui du moteur synchrone ou de
l'alternateur, c'est lui qui crée le champ tournant. Il comporte en fait un circuit magnétique
entièrement feuilleté en forme de couronne dont la périphérie intérieure est entaillée
régulièrement d’un certain nombre d’encoches identiques. Dans ces encoches viennent se
placer les faisceaux des conducteurs formant l'enroulement statorique.
Figure V.1. Exemple de stator d’une MAS
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
72
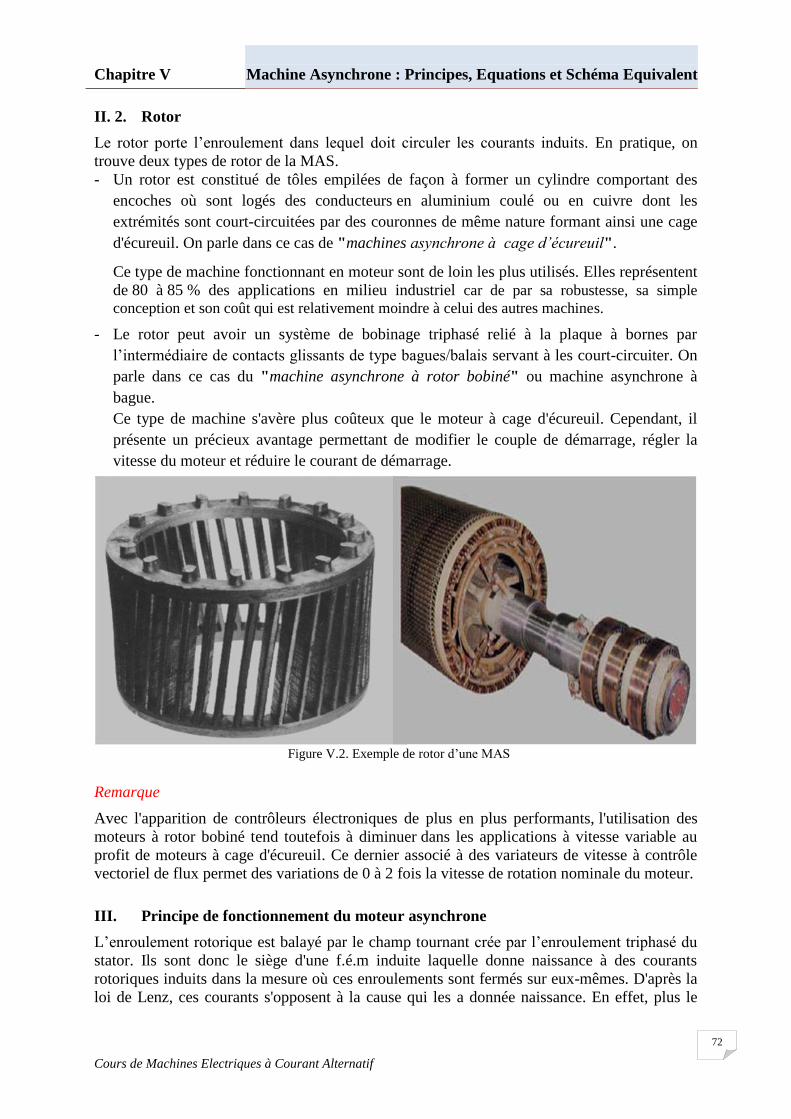
II. 2. Rotor
Le rotor porte l’enroulement dans lequel doit circuler les courants induits. En pratique, on
trouve deux types de rotor de la MAS.
- Un rotor est constitué de tôles empilées de façon à former un cylindre comportant des
encoches où sont logés des conducteurs en aluminium coulé ou en cuivre dont les
extrémités sont court-circuitées par des couronnes de même nature formant ainsi une cage
d'écureuil. On parle dans ce cas de "machines asynchrone à cage d’écureuil".
Ce type de machine fonctionnant en moteur sont de loin les plus utilisés. Elles représentent
de 80 à 85 % des applications en milieu industriel car de par sa robustesse, sa simple
conception et son coût qui est relativement moindre à celui des autres machines.
- Le rotor peut avoir un système de bobinage triphasé relié à la plaque à bornes par
l’intermédiaire de contacts glissants de type bagues/balais servant à les court-circuiter. On
parle dans ce cas du "machine asynchrone à rotor bobiné" ou machine asynchrone à
bague.
Ce type de machine s'avère plus coûteux que le moteur à cage d'écureuil. Cependant, il
présente un précieux avantage permettant de modifier le couple de démarrage, régler la
vitesse du moteur et réduire le courant de démarrage.
Remarque
Avec l'apparition de contrôleurs électroniques de plus en plus performants, l'utilisation des
moteurs à rotor bobiné tend toutefois à diminuer dans les applications à vitesse variable au
profit de moteurs à cage d'écureuil. Ce dernier associé à des variateurs de vitesse à contrôle
vectoriel de flux permet des variations de 0 à 2 fois la vitesse de rotation nominale du moteur.
III. Principe de fonctionnement du moteur asynchrone
L’enroulement rotorique est balayé par le champ tournant crée par l’enroulement triphasé du
stator. Ils sont donc le siège d'une f.é.m induite laquelle donne naissance à des courants
rotoriques induits dans la mesure où ces enroulements sont fermés sur eux-mêmes. D'après la
loi de Lenz, ces courants s'opposent à la cause qui les a donnée naissance. En effet, plus le
Figure V.2. Exemple de rotor d’une MAS

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
73
rotor accélère, plus sa vitesse relative par rapport au champ tournant devient réduite. S'ils
tournent tous les deux à la même vitesse, il y a une immobilité relative de l’enroulement
rotorique par rapport au champ, donc il n’y aura plus de courants induits, donc plus de couple
d'entraînement. On aura donc toujours un écart entre la vitesse du champ tournant et celle du
rotor. Cet écart rapporté à la vitesse synchrone est dit le glissement. Il est définit comme suit :
𝑔 =𝑛𝑠−𝑛
𝑛𝑠 (V.1)
III. 1. Principe de fonctionnement de la MAS à rotor bobiné
III. 1. 1. Fonctionnement à rotor ouvert
Dans le cas du moteur à rotor bobiné, le circuit rotorique étant ouvert et le circuit statorique
étant alimenté par le réseau, la machine asynchrone se comporte exactement comme un
transformateur à vide. Il n’y a pas de courant au secondaire donc il n’aura plus du couple et
pas de mouvement du rotor. Le flux statorique induit dans chaque phase du primaire (stator)
une f.c.é.m "𝐸𝑠" et dans chaque phase du secondaire (rotor) une f.é.m "𝐸𝑟" tel que :
𝐸𝑠 = 𝐾𝑠𝑁𝑠𝑓𝜙 et 𝐸𝑟 = 𝐾𝑟𝑁𝑟𝑓𝜙 (V.2)
Avec : 𝐾𝑠 et 𝐾𝑟 sont les coefficients de KAPP des enroulements statorique et rotorique
𝑁𝑠 et 𝑁𝑟 sont les nombres de conducteurs des enroulements statorique et rotorique
𝑓 est la fréquence d’alimentation de l’enroulement statorique
𝜙 est le flux utile sous un pôle
Le rapport de transformation est définit par :
𝑚 =𝐸𝑠
𝐸𝑟=
𝐾𝑠𝑁𝑠
𝐾𝑟𝑁𝑟 (V.3)
Comme pour le transformateur, le courant statorique est faible et très déphasé en arrière par
rapport à la tension car le primaire crée un flux que le secondaire ouvert ne peut le compenser.
En négligeant la chute de tension résistive et inductive au primaire, le rapport de
transformation est déduit approximativement de l’essai à vide (MAS à rotor ouvert) comme
suit :
𝑚 =𝐸𝑠
𝐸𝑟≅
𝑉𝑠
𝑉𝑟 (V.4)
Tel que 𝑉𝑠 est la tension simple d’une phase du primaire 𝑉𝑠 ≅ 𝐸𝑠 et 𝑉𝑟 est la tension simple
d’une phase du secondaire 𝑉𝑟 = 𝐸𝑟 .
III. 1. 2. Fonctionnement à rotor en court-circuit
Quand en met en court-circuit l’enroulement secondaire, les f.é.m induites créent un système
équilibré de courant secondaire.
Avant le démarrage (n= 0), les f.é.m induites au rotor sont de la même fréquence que les
f.c.é.m. statoriques. L’enroulement statorique se trouve en court-circuit avec la totalité de la
f.é.m et une faible impédance ce qui provoque un très fort courant et ainsi un fort couple
mettant la machine en rotation.
Quand la vitesse du moteur augmente, les lignes du champ tournant (à la vitesse de
synchronisme) traversent les sections du bobinage du rotor à une vitesse égale la différence

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
74
entre la vitesse de synchronisme et la vitesse de rotation. La pulsation des flux rotoriques (de
même que les f.é.m, les courants et les tensions) seraient donc égale :
𝜔𝑟 = 𝜔𝑠 −𝜔 = 𝑔𝜔𝑠 (V.5)
Avec 𝜔 = 𝑝Ω est la pulsation de rotation mécanique et Ω est la vitesse angulaire du rotor.
Le passage des courant dans l’enroulement du secondaire créent une f.m.m tournante à la
vitesse Ω𝑟 tel que :
Ω𝑟 =𝜔𝑟
𝑝= 𝑔Ω𝑠 (V.6)
L’enroulement du secondaire étant lui même tournant par rapport au stator à la vitesse
mécanique Ω, donc le champ tournant du secondaire est tournant à la somme des deux
vitesses "Ω + Ω𝑟" qui est égale à la vitesse de synchronisme.
Au sein d’une machine asynchrone, les deux f.m.m (du stator et rotor) sont tournantes à la
même vitesse (la vitesse de synchronisme) quelque soit le glissement.
III. 2. Principe de fonctionnement de la MAS à cage
On suppose qu’à chaque pôle fictif du champ tournant du stator correspond un seul
conducteur actif (figure V.3). A l’état initial où chaque conducteur est placé sous un pôle,
nous appliquons la règle des trois doigts de la main droite (𝐹 = 𝐼.𝑑𝑙 ⋀𝐵 ) pour retenir le sens de
déplacement de chaque conducteur par rapport au sens du champ tournant.
Le conducteur A exposé au pôle nord est le siège d’une f.é.m qui s’ajoute à celle du
conducteur B exposé au pôle sud. Les deux couronnes aux extrémités des deux conducteurs
permettent au courant induit à refermer le circuit formant ainsi une section. La force de
LAPLACE appliquée sur ces deux conducteurs suivant la règle des trois doigts de la main
droite met en mouvement ces conducteurs dans le même sens que le champ tournant. Même
phénomène se produit dans la section formée des deux conducteurs C et D.
Remarques
- Le nombre de pôle du rotor doit être le même que le stator.
- Dans les conducteur situés sur l’axe inter polaire n’existe ni courant ni couple moteur.
Dans une machine à un seul conducteur par pôle, Le couple s’annule périodiquement. En
complétant l’enroulement rotorique par plusieurs conducteurs dont leurs extrémités sont
Figure V.3. Position des conducteur par rapport aux pôles du champ tournant
N
S S
N
B
A
B
C
D I
F
F
Conducteur B
Conducteur A
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
75
réunies aux deux couronnes de grosse section et de résistance négligeable par rapport à celle
des conducteurs, le couple ne s’annulera jamais car les conducteurs qui ne sont pas exposés à
l’axe inter polaire assurent la continuité du couple. Le nombre total des conducteurs doit être
multiple du nombre de pôle pour assurer que ce dernier est le même pour le stator que pour le
rotor.
IV. Schéma Equivalent Monophasé
IV. 1. Mise en Equations
Pour établir des relations simples entre les tensions d’alimentation de la MAS et ses courants
primaires et secondaires, nous adopterons un certain nombre d’hypothèses.
- On néglige la saturation du circuit magnétique, ainsi que les pertes par hystérésis et
courant de Foucault dans celui-ci. Cela permet de définir facilement les inductances
propres ou mutuelles des bobinages.
- On suppose que l’enroulement de chaque phase, tant au stator qu’au rotor, crée un flux
à répartition sinusoïdale. Cela simplifie l’expression des mutuelles-inductances entre
phase du stator et du rotor.
- La construction de la machine est supposée symétrique, l’entrefer est constant et
l’échauffement n’est pas pris en compte.
- On néglige les effets complexes tels que l’effet de peau, effet des extrémités,
papillonnement,…
Ces hypothèses signifient entre autres que les flux sont additifs, que les inductances propres
sont constantes et qu’il y a une variation sinusoïdale des inductances mutuelles entre les
enroulements statoriques et rotoriques en fonction de l'angle électrique de leurs axes
magnétiques.
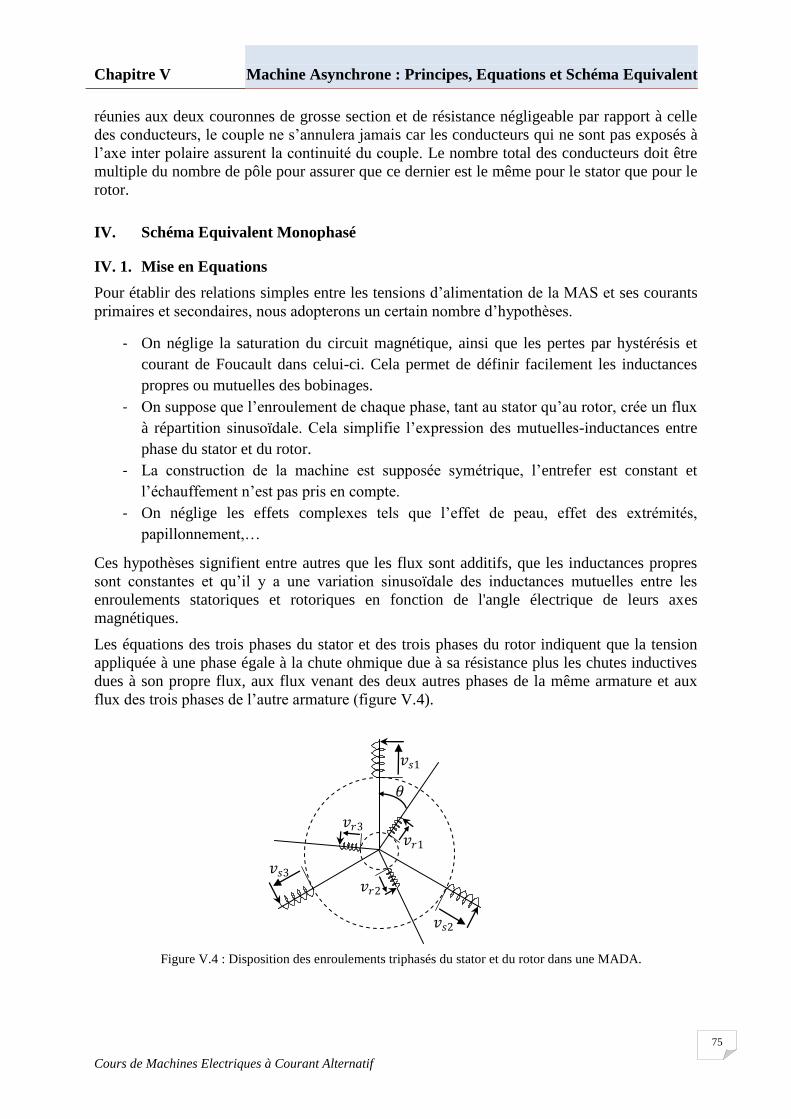
Les équations des trois phases du stator et des trois phases du rotor indiquent que la tension
appliquée à une phase égale à la chute ohmique due à sa résistance plus les chutes inductives
dues à son propre flux, aux flux venant des deux autres phases de la même armature et aux
flux des trois phases de l’autre armature (figure V.4).
𝑣𝑠1
𝑣𝑠2
𝑣𝑠3
𝑣𝑟1
𝑣𝑟2
𝑣𝑟3
𝜃
Figure V.4 : Disposition des enroulements triphasés du stator et du rotor dans une MADA.

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
76
vs = Rs is +
d
dt ℒs is +
d
dt Mrs ir
vr = Rr ir +d
dt ℒr ir +
d
dt Msr is
(V.7)
Avec
𝑣𝑠 =
𝑣𝑠1
𝑣𝑠2
𝑣𝑠3
, 𝑣𝑟 =
𝑣𝑟1
𝑣𝑟2
𝑣𝑟3
les tensions simples d’alimentation du stator et du rotor
respectivement
𝑖𝑠 = 𝑖𝑠1
𝑖𝑠2
𝑖𝑠3
, 𝑖𝑟 = 𝑖𝑟1
𝑖𝑟2
𝑖𝑟3
les courants dans les enroulements du stator et du rotor
respectivement
ℒ𝑠 =
𝑙𝑠 𝑚𝑠 𝑚𝑠
𝑚𝑠 𝑙𝑠 𝑚𝑠
𝑚𝑠 𝑚𝑠 𝑙𝑠
, ℒ𝑟 =
𝑙𝑟 𝑚𝑟 𝑚𝑟
𝑚𝑟 𝑙𝑟 𝑚𝑟
𝑚𝑟 𝑚𝑟 𝑙𝑟
les matrices des inductances du stator et du
rotor respectivement où 𝑙𝑠 et 𝑙𝑟 sont les inductances propres d’une phase. Alors que 𝑚𝑠 et 𝑚𝑟
sont les inductances mutuelles entre deux phases de la même armature.
𝑀𝑟𝑠 =
𝑚𝑟1𝑠1𝑚𝑟2𝑠1
𝑚𝑟3𝑠1
𝑚𝑟1𝑠2𝑚𝑟2𝑠2
𝑚𝑟3𝑠2
𝑚𝑟1𝑠3𝑚𝑟2𝑠3
𝑚𝑟3𝑠3
, 𝑀𝑠𝑟 = 𝑀𝑟𝑠 𝑡 les matrices des inductances mutuelles entre
une phase d’une armature et une phase de l’autre armature tel que :
𝑚𝑟𝑖𝑠𝑗
= 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 + 𝑖 − 𝑗 2𝜋
3
𝑚𝑠𝑖𝑟𝑗= 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 + 𝑗 − 𝑖
2𝜋
3
𝑒𝑡 𝑖 = 1,2,3 𝑒𝑡 𝑗 = 1,2,3 (V.8)
𝜃 est l’angle mécanique que fait la phase 𝑟𝑖 de l’armature tournante par rapport à la phase 𝑠𝑖 de l’armature fixe et 𝑝 représente le nombre de paire de pôle.
En remplaçant chaque vecteurs et matrices par ces valeurs, nous aboutissons au système
global suivant :
𝑣𝑠1 = 𝑅𝑠𝑖𝑠1 + 𝑙𝑠
𝑑𝑖𝑠1
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠2
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠1
𝑖𝑟1 + 𝑚𝑟2𝑠1𝑖𝑟2 + 𝑚𝑟3𝑠1
𝑖𝑟3
𝑣𝑠2 = 𝑅𝑠𝑖𝑠2 + 𝑙𝑠𝑑𝑖𝑠2
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠1
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠2
𝑖𝑟1 + 𝑚𝑟2𝑠2𝑖𝑟2 + 𝑚𝑟3𝑠2
𝑖𝑟3
𝑣𝑠3 = 𝑅𝑠𝑖𝑠3 + 𝑙𝑠𝑑𝑖𝑠3
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠1
𝑑𝑡+ 𝑚𝑠
𝑑𝑖𝑠2
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠3
𝑖𝑟1 + 𝑚𝑟2𝑠3𝑖𝑟2 + 𝑚𝑟3𝑠3
𝑖𝑟3
𝑣𝑟1 = 𝑅𝑟 𝑖𝑟1 + 𝑙𝑟𝑑𝑖𝑟1
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟2
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟1
𝑖𝑠1 + 𝑚𝑠2𝑟1𝑖𝑠2 + 𝑚𝑠3𝑟1
𝑖𝑠3
𝑣𝑟2 = 𝑅𝑟 𝑖𝑟2 + 𝑙𝑟𝑑𝑖𝑟2
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟1
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟2
𝑖𝑠1 + 𝑚𝑠2𝑟2𝑖𝑠2 + 𝑚𝑠3𝑟2
𝑖𝑠3
𝑣𝑟3 = 𝑅𝑟 𝑖𝑟3 + 𝑙𝑟𝑑𝑖𝑟3
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟1
𝑑𝑡+ 𝑚𝑟
𝑑𝑖𝑟2
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟3
𝑖𝑠1 + 𝑚𝑠2𝑟3𝑖𝑠2 + 𝑚𝑠3𝑟3
𝑖𝑠3
(V.9)
Le système d’équation (V.9) admet une écriture plus simple puisque la machine fonctionne en
régime équilibré où les relations suivantes sont vérifiées ;
𝑖𝑠1 + 𝑖𝑠2 + 𝑖𝑠3 = 0 𝑒𝑡 𝑖𝑟1 + 𝑖𝑟2 + 𝑖𝑟3 = 0
𝑚𝑟𝑖𝑠𝑗= 𝑚𝑠𝑖𝑟𝑗
= 0 3𝑖=1
3𝑖=1 𝑝𝑜𝑢𝑟 𝑗 = 1.3
(V.10)

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
77
Et devient comme suit :
𝑣𝑠1 = 𝑅𝑠𝑖𝑠1 + 𝐿𝑠
𝑑𝑖𝑠1
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠1
𝑖𝑟1 + 𝑚𝑟2𝑠1𝑖𝑟2 + 𝑚𝑟3𝑠1
𝑖𝑟3
𝑣𝑠2 = 𝑅𝑠𝑖𝑠2 + 𝐿𝑠𝑑𝑖𝑠2
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠2
𝑖𝑟1 + 𝑚𝑟2𝑠2𝑖𝑟2 + 𝑚𝑟3𝑠2
𝑖𝑟3
𝑣𝑠3 = 𝑅𝑠𝑖𝑠3 + 𝐿𝑠𝑑𝑖𝑠3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠3
𝑖𝑟1 + 𝑚𝑟2𝑠3𝑖𝑟2 + 𝑚𝑟3𝑠3
𝑖𝑟3
𝑣𝑟1 = 𝑅𝑟 𝑖𝑟1 + 𝐿𝑟𝑑𝑖𝑟1
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟1
𝑖𝑠1 + 𝑚𝑠2𝑟1𝑖𝑠2 + 𝑚𝑠3𝑟1
𝑖𝑠3
𝑣𝑟2 = 𝑅𝑟 𝑖𝑟2 + 𝐿𝑟𝑑𝑖𝑟2
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟2
𝑖𝑠1 + 𝑚𝑠2𝑟2𝑖𝑠2 + 𝑚𝑠3𝑟2
𝑖𝑠3
𝑣𝑟3 = 𝑅𝑟 𝑖𝑟3 + 𝐿𝑟𝑑𝑖𝑟3
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟3
𝑖𝑠1 + 𝑚𝑠2𝑟3𝑖𝑠2 + 𝑚𝑠3𝑟3
𝑖𝑠3
(V.11)
Avec 𝐿𝑠 = 𝑙𝑠 −𝑚𝑠 et 𝐿𝑟 = 𝑙𝑟 −𝑚𝑟 sont les inductances cycliques statoriques et rotoriques.
Ce sont les équations utilisables pour l’étude de tous les régimes équilibré, déséquilibré,
transitoire et permanent.
En régime permanent, lorsque le moteur est alimenté par un système équilibré de tensions
sinusoïdales de pulsation 𝜔𝑠, les courants primaires et secondaires sont aussi sinusoïdaux et
ont respectivement pour pulsation 𝜔𝑠 et 𝑔𝜔𝑠. Prenant pour origine l’instant où les axes du
stator et du rotor sont confondus :
𝜃𝑠 = 𝜔𝑠𝑡, 𝜃𝑟 = 𝑔𝜔𝑠𝑡, 𝜃 = 𝜔𝑡,
Les tensions au primaire sont :
𝑣𝑠1 = 𝑉𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠
𝑣𝑠2 = 𝑉𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 −2𝜋
3
𝑣𝑠3 = 𝑉𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 −4𝜋
3
Les courants au primaire sont :
𝑖𝑠1 = 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑
𝑖𝑠2 = 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 −2𝜋
3
𝑖𝑠3 = 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 −4𝜋
3
Les courants au secondaire sont :
𝑖𝑟1 = 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾
𝑖𝑟2 = 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 −2𝜋
3
𝑖𝑟3 = 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 −4𝜋
3
Il suffit d’étudier le fonctionnement d’une seule phase au stator et au rotor, ce qui se passe
aux autres étant identique à 2𝜋
3 ou
4𝜋
3 près. Le système se réduit à :
𝑉𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 = 𝑅𝑠𝑖𝑠1 + 𝐿𝑠
𝑑𝑖𝑠1
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑟1𝑠1
𝑖𝑟1 + 𝑚𝑟2𝑠1𝑖𝑟2 + 𝑚𝑟3𝑠1
𝑖𝑟3
0 = 𝑅𝑟 𝑖𝑟1 + 𝐿𝑟𝑑𝑖𝑟1
𝑑𝑡+
𝑑
𝑑𝑡 𝑚𝑠1𝑟1
𝑖𝑠1 + 𝑚𝑠2𝑟1𝑖𝑠2 + 𝑚𝑠3𝑟1
𝑖𝑠3 (V.12)

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
78
Substituons les courants et les mutuelles par ces équations, nous trouverons :
𝑚𝑟1𝑠1
𝑖𝑟1 + 𝑚𝑟2𝑠1𝑖𝑟2 + 𝑚𝑟3𝑠1
𝑖𝑟3 =3
2𝑀𝑚𝑎𝑥 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝛾
𝑚𝑠1𝑟1𝑖𝑠1 + 𝑚𝑠2𝑟1
𝑖𝑠2 + 𝑚𝑠3𝑟1𝑖𝑠3 =
3
2𝑀𝑚𝑎𝑥 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝜑
Car :
𝑚𝑟1𝑠1𝑖𝑟1 + 𝑚𝑟2𝑠1
𝑖𝑟2 + 𝑚𝑟3𝑠1𝑖𝑟3
= 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾
+ 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 +2𝜋
3 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 −
2𝜋
3
+ 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 +4𝜋
3 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 −
4𝜋
3
=3
2𝑀𝑚𝑎𝑥 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 + 𝑔𝜃𝑠 − 𝛾
=3
2𝑀𝑚𝑎𝑥 𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝛾
Puisque 𝜃 + 𝑔𝜃𝑠 = 𝜃𝑠
De même
𝑚𝑠1𝑟1𝑖𝑠1 + 𝑚𝑠2𝑟1
𝑖𝑠2 + 𝑚𝑠3𝑟1𝑖𝑠3
= 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 −𝜑
+ 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 −2𝜋
3 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 −
2𝜋
3
+ 𝑀𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃 −4𝜋
3 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 −
4𝜋
3 = 𝑀𝑚𝑎𝑥 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜃 − 𝜑
=3
2𝑀𝑚𝑎𝑥 𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝜑
Puisque 𝜃𝑠 − 𝜃 = 𝑔𝜃𝑠
On pose : 𝑀 =3
2𝑀𝑚𝑎𝑥
Après substitution et dérivation dans (V.12), nous aboutissons au système suivant :
𝑉𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 = 𝑅𝑠𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 + 𝐿𝑠𝜔𝑠𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝜑 +
𝜋
2 + 𝑀𝜔𝑠𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝜃𝑠 − 𝛾 +
𝜋
2
0 = 𝑅𝑟𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 + 𝐿𝑟𝑔𝜔𝑠𝐼𝑟𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝛾 +𝜋
2 + 𝑀𝑔𝜔𝑠𝐼𝑠𝑚𝑎𝑥 𝑐𝑜𝑠 𝑔𝜃𝑠 − 𝜑 +
𝜋
2
(V.13)
On vérifie que la pulsation est bien que 𝜔𝑠 pour tous les termes de l’équation du stator, et 𝑔𝜔𝑠
pour tous les termes de l’équation du rotor.
Normalement, il faut tracer deux diagrammes vectoriels distincts,
- L’un relatif à une phase du stator représentant :
𝑅𝑠𝐼𝑠 + 𝑗𝐿𝑠𝜔𝑠𝐼𝑠 + 𝑗𝑀𝜔𝑠𝐼𝑟 = 𝑉𝑠
Où tous les vecteurs tournent à la vitesse 𝜔𝑠 y compris le vecteur 𝐼𝑟
- L’autre relatif à une phase du rotor représentant :
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
79
𝑅𝑟𝐼𝑟 + 𝑗𝐿𝑟𝑔𝜔𝑠𝐼𝑟 + 𝑗𝑀𝑔𝜔𝑠𝐼𝑠 = 0
Où tous les vecteurs tournent à la vitesse 𝑔𝜔𝑠 y compris le vecteur 𝐼𝑠
Mais on ne change pas les relations établies à partir d’un diagramme vectoriel si on respecte
les modules des vecteurs et leurs déphasages relatifs.
Si on admet que tous les grandeurs secondaires tournent à la pulsation 𝜔𝑠, on retrouve le
déphasage de 𝜋
2 entre la chute ohmique due à 𝐼𝑟 passant dans 𝑅𝑟 et la chute inductive due à
son passage dans l’inductance 𝐿𝑟 . On conserve le déphasage de 𝜑 − 𝛾 entre 𝑗𝑀𝜔𝑠𝐼𝑟 et
𝑗𝐿𝑠𝜔𝑠𝐼𝑠 de l’équation statorique et entre 𝑗𝐿𝑟𝜔𝑠𝐼𝑟 et 𝑗𝑀𝜔𝑠𝐼𝑠 de l’équation rotorique. En
ramenant tous les tensions et tous les courants à la pulsation 𝜔𝑠, on peut écrira donc :
𝑅𝑠𝐼𝑠 + 𝑗𝐿𝑠𝜔𝑠𝐼𝑠 + 𝑗𝑀𝜔𝑠𝐼𝑟 = 𝑉𝑠𝑅𝑟
𝑔𝐼𝑟 + 𝑗𝐿𝑟𝜔𝑠𝐼𝑟 + 𝑗𝑀𝜔𝑠𝐼𝑠 = 0
(V.14)
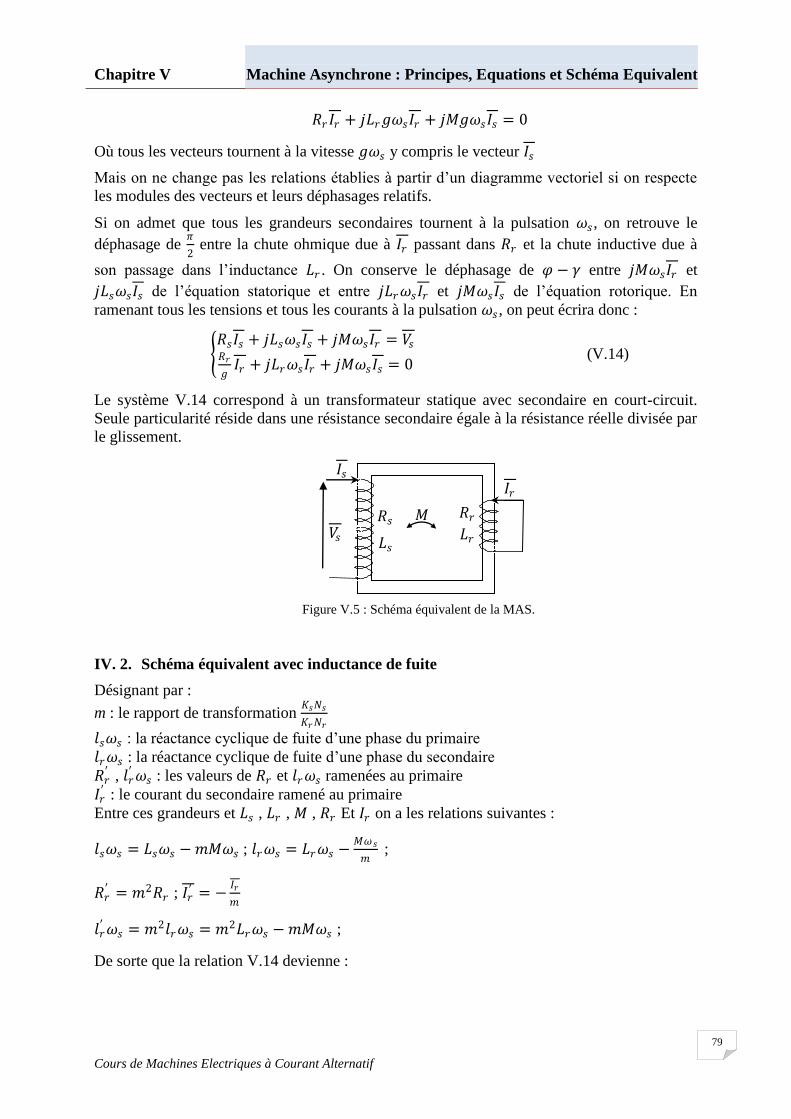
Le système V.14 correspond à un transformateur statique avec secondaire en court-circuit.
Seule particularité réside dans une résistance secondaire égale à la résistance réelle divisée par
le glissement.
IV. 2. Schéma équivalent avec inductance de fuite
Désignant par :
m : le rapport de transformation 𝐾𝑠𝑁𝑠
𝐾𝑟𝑁𝑟
𝑙𝑠𝜔𝑠 : la réactance cyclique de fuite d’une phase du primaire
𝑙𝑟𝜔𝑠 : la réactance cyclique de fuite d’une phase du secondaire
𝑅𝑟′ , 𝑙𝑟
′ 𝜔𝑠 : les valeurs de 𝑅𝑟 et 𝑙𝑟𝜔𝑠 ramenées au primaire
𝐼𝑟′ : le courant du secondaire ramené au primaire
Entre ces grandeurs et 𝐿𝑠 , 𝐿𝑟 , 𝑀 , 𝑅𝑟 Et 𝐼𝑟 on a les relations suivantes :
𝑙𝑠𝜔𝑠 = 𝐿𝑠𝜔𝑠 −𝑚𝑀𝜔𝑠 ; 𝑙𝑟𝜔𝑠 = 𝐿𝑟𝜔𝑠 −𝑀𝜔𝑠
𝑚 ;
𝑅𝑟′ = 𝑚2𝑅𝑟 ; 𝐼𝑟′ = −
𝐼𝑟
𝑚
𝑙𝑟′ 𝜔𝑠 = 𝑚2𝑙𝑟𝜔𝑠 = 𝑚2𝐿𝑟𝜔𝑠 −𝑚𝑀𝜔𝑠 ;
De sorte que la relation V.14 devienne :
Figure V.5 : Schéma équivalent de la MAS.
𝑉𝑠
𝐼𝑟
𝑅𝑠
𝐿𝑠
𝑅𝑟 𝐿𝑟
𝑀
𝐼𝑠
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
80
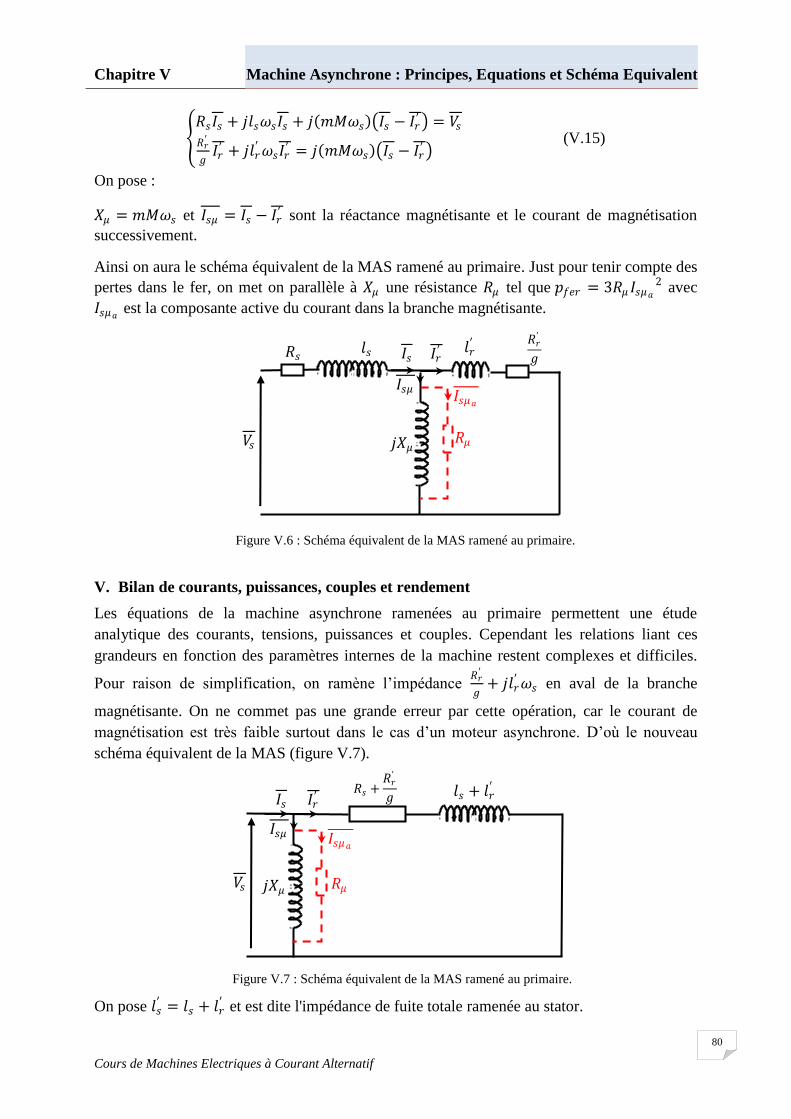
𝑅𝑠𝐼𝑠 + 𝑗𝑙𝑠𝜔𝑠𝐼𝑠 + 𝑗 𝑚𝑀𝜔𝑠 𝐼𝑠 − 𝐼𝑟′ = 𝑉𝑠𝑅𝑟′
𝑔𝐼𝑟′ + 𝑗𝑙𝑟
′ 𝜔𝑠𝐼𝑟′ = 𝑗 𝑚𝑀𝜔𝑠 𝐼𝑠 − 𝐼𝑟′ (V.15)
On pose :
𝑋𝜇 = 𝑚𝑀𝜔𝑠 et 𝐼𝑠𝜇 = 𝐼𝑠 − 𝐼𝑟′ sont la réactance magnétisante et le courant de magnétisation
successivement.
Ainsi on aura le schéma équivalent de la MAS ramené au primaire. Just pour tenir compte des
pertes dans le fer, on met on parallèle à 𝑋𝜇 une résistance 𝑅𝜇 tel que 𝑝𝑓𝑒𝑟 = 3𝑅𝜇 𝐼𝑠𝜇𝑎2 avec
𝐼𝑠𝜇𝑎 est la composante active du courant dans la branche magnétisante.
V. Bilan de courants, puissances, couples et rendement
Les équations de la machine asynchrone ramenées au primaire permettent une étude
analytique des courants, tensions, puissances et couples. Cependant les relations liant ces
grandeurs en fonction des paramètres internes de la machine restent complexes et difficiles.
Pour raison de simplification, on ramène l’impédance 𝑅𝑟′
𝑔+ 𝑗𝑙𝑟
′ 𝜔𝑠 en aval de la branche
magnétisante. On ne commet pas une grande erreur par cette opération, car le courant de
magnétisation est très faible surtout dans le cas d’un moteur asynchrone. D’où le nouveau
schéma équivalent de la MAS (figure V.7).
On pose 𝑙𝑠
′ = 𝑙𝑠 + 𝑙𝑟′ et est dite l'impédance de fuite totale ramenée au stator.
Figure V.7 : Schéma équivalent de la MAS ramené au primaire.
𝑉𝑠
𝐼𝑟′ 𝑅𝑠 +
𝑅𝑟′
𝑔
𝑙𝑠 + 𝑙𝑟′
𝐼𝑠
𝐼𝑠𝜇
𝑅𝜇
𝑗𝑋𝜇
𝐼𝑠𝜇𝑎
Figure V.6 : Schéma équivalent de la MAS ramené au primaire.
𝑉𝑠
𝐼𝑟′ 𝑅𝑠 𝑙𝑠 𝑙𝑟′
𝑅𝑟′
𝑔 𝐼𝑠
𝐼𝑠𝜇
𝑅𝜇
𝑗𝑋𝜇
𝐼𝑠𝜇𝑎

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
81
V. 1. Courants
V. 1. 1. Le courant statorique
Il est calculé à partir de l’impédance 𝑍𝑠 de la MAS vue de l’entrée comme suit :
𝐼𝑠 =𝑉𝑠
𝑍𝑠 avec 𝑍𝑠 est donnée par :
𝑍𝑠 = 𝑅𝜇 +𝑗𝑋𝜇 𝑅𝑠+
𝑅𝑟′
𝑔+𝑗 𝑙𝑠
′𝜔𝑠
𝑅𝜇 +𝑗𝑋𝜇 +𝑗𝑅𝜇𝑋𝜇 𝑅𝑠+𝑅𝑟′
𝑔+𝑗 𝑙𝑠
′𝜔𝑠 (V.16)
Lorsque le glissement est nul (à la vitesse synchrone), Le courant statorique égale au courant
magnétisant car l'impédance 𝑅𝑠 +𝑅𝑟′
𝑔+ 𝑗𝑙𝑠
′𝜔𝑠 est infinie. Le courant 𝐼𝑠 est faible et très
déphasé en arrière par rapport à la tension. Plus le glissement croit, plus l'impédance 𝑅𝑠 +𝑅𝑟′
𝑔+ 𝑗𝑙𝑠
′𝜔𝑠 diminue ce qui provoque une diminution de l'impédance totale est ainsi le courant
𝐼𝑠 augmente et son déphasage diminue. A l'arrêt (𝑔 = 0), l'impédance en parallèle à la
branche magnétisante est faible, ce qui donne une impédance totale relativement faible. Ainsi
le courant est très fort et de nouveau très déphasé par rapport à la tension. Lorsque le
glissement prend des valeurs assez élevée (marche dans le sens inverse du champ tournant),
l'impédance totale diminuera encore plus et le courant deviendra de plus en plus important.
V. 1. 2. Le courant rotorique
Le courant rotorique est déduit de celui ramené au primaire qui est calculé comme suit :
𝐼𝑟′ =𝑉𝑠
𝑅𝑠+𝑅𝑟′
𝑔+𝑗 𝑙𝑠
′𝜔𝑠
(V.17)
Lorsque le glissement est nul (à la vitesse synchrone), Le courant rotorique est nul car
l'impédance 𝑅𝑠 +𝑅𝑟′
𝑔+ 𝑗𝑙𝑠
′𝜔𝑠 est infinie. Plus le glissement croit, plus l'impédance 𝑅𝑠 +𝑅𝑟′
𝑔+
𝑗𝑙𝑠′𝜔𝑠 diminue ce qui provoque une croissance du courant 𝐼𝑟′ et son déphasage est presque
égale à celui du courant statorique. A l'arrêt (𝑔 = 0), l'impédance en parallèle à la branche
magnétisante est faible et le courant est très fort et de nouveau très déphasé par rapport à la
tension. Lorsque le glissement prend des valeurs assez élevée (marche dans le sens inverse du
champ tournant), l'impédance 𝑅𝑠 +𝑅𝑟′
𝑔+ 𝑗𝑙𝑠
′𝜔𝑠 diminuera encore plus et le courant deviendra
de plus en plus important.
V. 2. Puissances
V. 2. 1. Puissances statoriques
La puissance absorbée par le moteur est :
𝑃𝑠 = 3 𝑅𝑒(𝑍𝑠)𝐼𝑠2 (V.18)

Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
82
La puissance transmise au rotor est définit comme la puissance absorbée par le moteur
diminuée des pertes localisées au stator à savoir les pertes dans le fer du stator et les pertes
Joule due à la résistance de l'enroulement du stator. Elle est donnée par :
𝑃𝑠′ = 𝑃𝑠 − 𝑝𝑓𝑒𝑟 − 𝑝𝑗𝑠 (V.19)
Avec : 𝑝𝑓𝑒𝑟 = 3𝑅𝜇 𝐼𝑠𝜇𝑎2 = 3
𝑉𝑠2
𝑅𝜇 et 𝑝𝑗𝑠 = 3𝑅𝑠𝐼𝑠
2
D'autre part cette puissance peut être déduite directement du schéma équivalent de la figure
V.6 comme suit:
𝑃𝑠′ = 3
𝑅𝑟′
𝑔 𝐼𝑟′ 2
=𝑝𝑗𝑟
𝑔 (V.20)
V. 2. 2. Puissance mécanique
La puissance mécanique est la puissance transmise au rotor diminuée des pertes non
mécaniques localisées au rotor à savoir les pertes Joule due à la résistance de l'enroulement du
rotor et les pertes dans le fer du rotor. Ces derniers sont négligeables car elles sont
proportionnelle au carrée de la fréquence, cependant la fréquence au niveau du rotor en
fonctionnement normale est très faible.
La puissance mécanique est donnée par :
𝑃𝑚𝑒𝑐 = 𝑃𝑠′ − 𝑝𝑗𝑟 (V.21)
Avec : 𝑝𝑗𝑟 = 3𝑅𝑟𝐼𝑟2 = 3𝑅𝑟
′ 𝐼𝑟′ 2
, ces pertes peuvent être évaluer en fonction de la puissance
transmise au rotor comme suit:
𝑝𝑗𝑟 = 𝑔𝑃𝑠′ (V.22)
Par substitution, on aura l'expression de la puissance mécanique
𝑃𝑚𝑒𝑐 = 1 − 𝑔 𝑃𝑠′ (V.23)
La puissance utile est la puissance mécanique diminuée des pertes mécaniques dues aux
frottements et à la ventilation.
𝑃𝑢 = 𝑃𝑚𝑒𝑐 − 𝑝𝑚𝑒𝑐 = 1 − 𝑔 𝑃𝑠′ − 𝑝𝑚𝑒𝑐 (V.24)
D'autre coté, elle peut être exprimée par :
𝑃𝑢 = 𝛤𝑢Ω (V.25)
Dont "𝛤𝑢" représente le couple utile exercé sur la charge mécanique et Ω représente la vitesse
angulaire du rotor.
V. 3. Le couple mécanique
C'est la puissance mécanique rapportée à la vitesse angulaire du rotor. Il est donné ainsi :
𝛤𝑚𝑒𝑐 =𝑃𝑚𝑒𝑐
Ω=
𝑃𝑠′
Ω𝑠 (V.26)
Ce couple est dit le couple synchrone car il est dépend que de la vitesse synchrone quelque
soit le glissement.
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
83
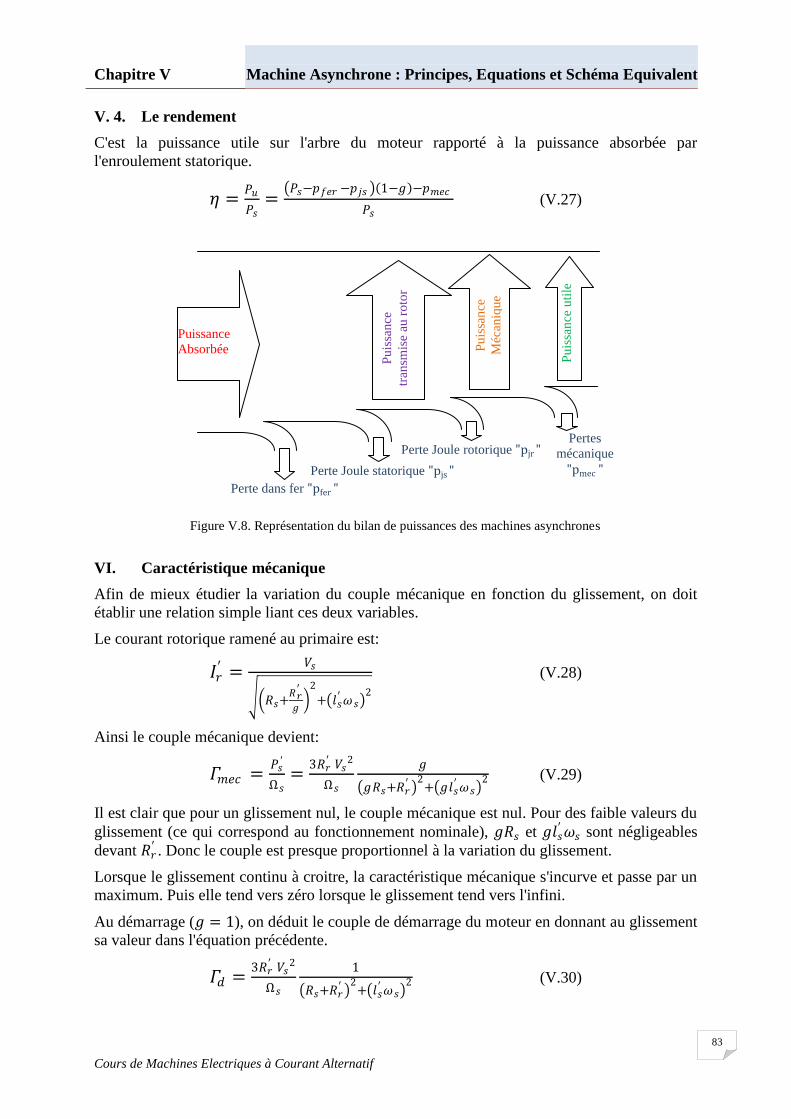
V. 4. Le rendement
C'est la puissance utile sur l'arbre du moteur rapporté à la puissance absorbée par
l'enroulement statorique.
𝜂 =𝑃𝑢
𝑃𝑠=
𝑃𝑠−𝑝𝑓𝑒𝑟 −𝑝𝑗𝑠 1−𝑔 −𝑝𝑚𝑒𝑐
𝑃𝑠 (V.27)
VI. Caractéristique mécanique
Afin de mieux étudier la variation du couple mécanique en fonction du glissement, on doit
établir une relation simple liant ces deux variables.
Le courant rotorique ramené au primaire est:
𝐼𝑟′ =
𝑉𝑠
𝑅𝑠+𝑅𝑟′
𝑔
2
+ 𝑙𝑠′𝜔𝑠
2
(V.28)
Ainsi le couple mécanique devient:
𝛤𝑚𝑒𝑐 =𝑃𝑠
′
Ω𝑠=
3𝑅𝑟′ 𝑉𝑠
2
Ω𝑠
𝑔
𝑔𝑅𝑠+𝑅𝑟′
2+ 𝑔𝑙𝑠
′𝜔𝑠 2 (V.29)
Il est clair que pour un glissement nul, le couple mécanique est nul. Pour des faible valeurs du
glissement (ce qui correspond au fonctionnement nominale), 𝑔𝑅𝑠 et 𝑔𝑙𝑠′𝜔𝑠 sont négligeables
devant 𝑅𝑟′ . Donc le couple est presque proportionnel à la variation du glissement.
Lorsque le glissement continu à croitre, la caractéristique mécanique s'incurve et passe par un
maximum. Puis elle tend vers zéro lorsque le glissement tend vers l'infini.
Au démarrage (𝑔 = 1), on déduit le couple de démarrage du moteur en donnant au glissement
sa valeur dans l'équation précédente.
𝛤𝑑 =3𝑅𝑟
′ 𝑉𝑠2
Ω𝑠
1
𝑅𝑠+𝑅𝑟′
2+ 𝑙𝑠
′𝜔𝑠 2 (V.30)
Figure V.8. Représentation du bilan de puissances des machines asynchrones
Perte dans fer "pfer "
Perte Joule statorique "pjs "
Pertes
mécanique
"pmec "
Puissance
Absorbée
Pu
issa
nce
Méc
aniq
ue
Pu
issa
nce
tran
smis
e au
ro
tor
Pu
issa
nce
uti
le
Perte Joule rotorique "pjr "
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
84
D'autre côté le couple de démarrage peut être calculé par l'équation suivante car la puissance
transmise au rotor égale aux pertes Joule rotorique à 𝑔 = 1.
𝛤𝑑 =𝑃𝑠
′ 𝑔=1
Ω𝑠=
𝑝𝑗𝑟
Ω𝑠 (V.31)
Lorsque la résistance rotorique varie, le couple de démarrage sera maximum pour la valeur
donnée ainsi :
𝑅𝑟′ = 𝑅𝑠
2 + 𝑙𝑠′𝜔𝑠 2 (V.32)
Pour trouver l'expression du couple maximum et celle du glissement correspondant, on
calcule la dérivée du couple mécanique en fonction du glissement. Après un développement
analytique, on trouvera les expressions suivantes :
𝑔/𝛤𝑚𝑎𝑥 =𝑅𝑟′
𝑅𝑠2+ 𝑙𝑠
′𝜔𝑠 2 (V.33)
et
𝛤𝑚𝑎𝑥 =3𝑉𝑠
2
2Ω𝑠
1
𝑅𝑠+ 𝑅𝑠2+ 𝑙𝑠
′𝜔𝑠 2 (V.34)
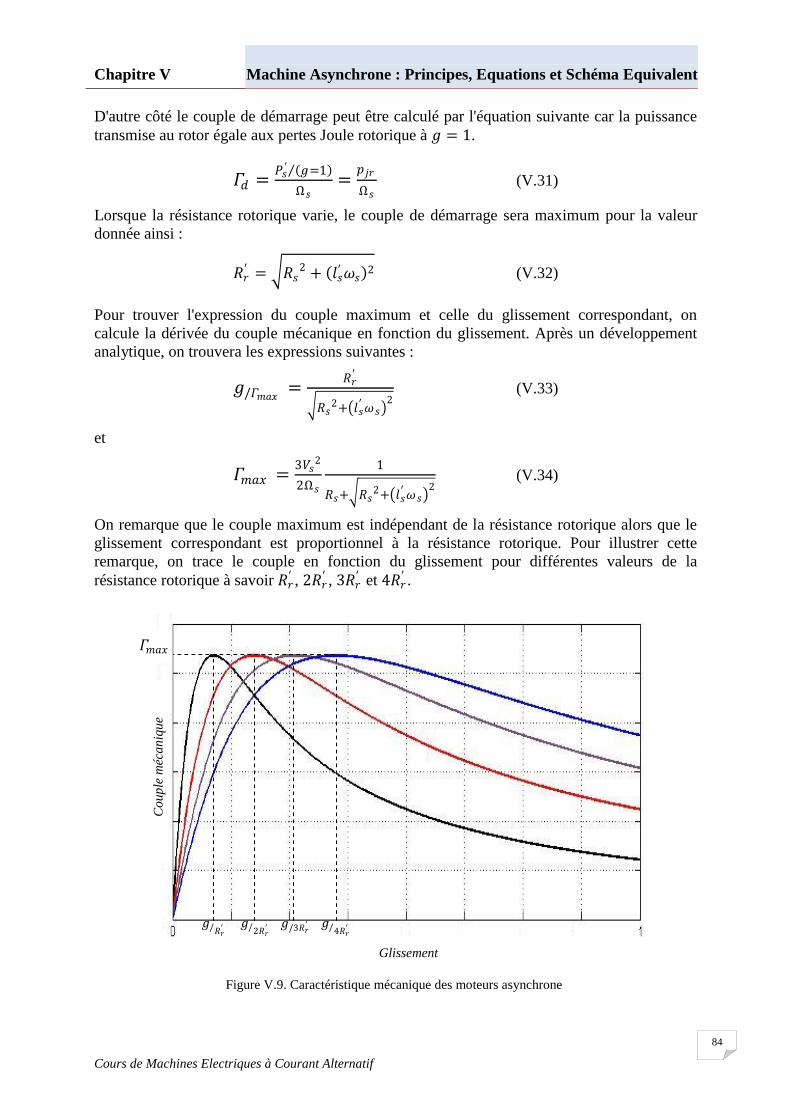
On remarque que le couple maximum est indépendant de la résistance rotorique alors que le
glissement correspondant est proportionnel à la résistance rotorique. Pour illustrer cette
remarque, on trace le couple en fonction du glissement pour différentes valeurs de la
résistance rotorique à savoir 𝑅𝑟′ , 2𝑅𝑟
′ , 3𝑅𝑟′ et 4𝑅𝑟
′ .
Figure V.9. Caractéristique mécanique des moteurs asynchrone
Co
up
le m
éca
niq
ue
𝛤𝑚𝑎𝑥
𝑔/𝑅𝑟′ 𝑔/2𝑅𝑟
′ 𝑔/3𝑅𝑟′ 𝑔/4𝑅𝑟
′
Glissement
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
85
Remarques
- Ces courbes présentent deux parties, une partie comprise entre le fonctionnement à
vide (𝑔 = 0) et le point où le couple est maximum. L'autre comprise entre ce point et
le point de démarrage (moteur calé où 𝑔 = 1). La première partie est stable où le
couple mécanique développé par le moteur augmente avec l'augmentation du couple
de charge mécanique. Hors la première partie, si le couple de charge continu à
augmenter, le moteur ne peut développer un tel couple pour rester en équilibre. Ainsi,
le moteur s'arrête. Le fonctionnement dans cette partie est donc instable.
- L'augmentation de la résistance rotorique ne modifie pas l'allure de la courbe de
variation 𝛤(𝑔). Mais elle l'étale vers les glissements élevés. Par conséquence, le couple
de démarrage et le glissement donnant le couple maximum augmentent.
- A un glissement donné, le couple est proportionnel au carré de la tension
d'alimentation.
- L'influence de la résistance rotorique montre les avantages du moteur à rotor bobiné à
bagues par rapport au moteur à cage d'écureuil.
Chapitre V Machine Asynchrone : Principes, Equations et Schéma Equivalent
Cours de Machines Electriques à Courant Alternatif
86
Table des matières
I. Introduction ....................................................................................................................... 71
II. Constitution de la machine asynchrone ........................................................................ 71
II. 1. Stator ............................................................................................................................ 71
II. 2. Rotor ............................................................................................................................. 72
III. Principe de fonctionnement du moteur asynchrone ..................................................... 72
III. 1. Principe de fonctionnement de la MAS à rotor bobiné ............................................. 73
III. 1. 1. Fonctionnement à rotor ouvert ............................................................................... 73
III. 1. 2. Fonctionnement à rotor en court-circuit................................................................. 73
III. 2. Principe de fonctionnement de la MAS à cage .......................................................... 74
IV. Schéma Equivalent Monophasé ................................................................................... 75
IV. 1. Mise en Equations ..................................................................................................... 75
IV. 2. Schéma équivalent avec inductance de fuite ............................................................. 79
V. Bilan de courants, puissances, couples et rendement ................................................... 80
V. 1. Courants ....................................................................................................................... 81
V. 1. 1. Le courant statorique .............................................................................................. 81
V. 1. 2. Le courant rotorique ............................................................................................... 81
V. 2. Puissances ..................................................................................................................... 81
V. 2. 1. Puissances statoriques ............................................................................................ 81
V. 2. 2. Puissance mécanique ............................................................................................. 82
V. 3. Le couple mécanique .................................................................................................... 82
V. 4. Le rendement ................................................................................................................ 83
VI. Caractéristique mécanique ........................................................................................... 83
Bibliographie
- G. Séguier, F. Notelet, ’’Electrotechnique industrielle’’, Téch et Doc, 1987.
- M. Kostenko et L. Piotrovski, ”Machines Electriques : Machines à Courant Alternatif ”
Tome II, 3ème édition, Édition MIR, 1979.
- A. Ivanov-Smolensky, ”Electrical Machines”, Édition MIR, 1982.
- J.L. Dalmasso, ”Cours d'électrotechnique 1 : Machines tournantes à courants
alternatifs”, Éditions Belin, 1985.
- A. Fouillé, ’’Electrotechnique a l 'usage des ingénieurs : Machines électriques’’, Tome II,
Édition Dunod, 1957.
- L. Lagron, ’’les Moteurs à Courants Alternatifs’’, Éditions Dunod, 1949.
- J. Châtelain, ’’Machines Electriques’’, Traité d'Electricité, Ecole Polytechnique Fédérale de
Lausanne, Éditions Georgi, 1983.





























