Embed Size (px)
Citation preview

Sciences Industriellesde l’Ingénieur
CI 3 – CIN : ÉTUDE DU COMPORTEMENT CINÉMATIQUE DES
SYSTÈMES
CHAPITRE 8 – ÉTUDE GRAPHIQUE DES MOUVEMENTS PLANS
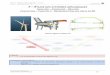
Système EPAS Schématisation 3D Modélisation plane
On s’intéresse au déploiement de l’Échelle Pivotante Automatique à commande Séquentielle. Lors de cette phase, lestourelles sont bloquées. Le mouvement de l’échelle est réalisé grâce à la sortie de la tige du vérin.
Ce mouvement à la particularité d’être "plan". En effet, les liaisons qui constituent le mécanisme ne génèrent que desmouvements dans le plan
−→x ;−→y
. Dans ce cas, il est possible d’utiliser des outils graphiques pour déterminer les vitessesde déplacement des solides.
Problém
atique
Problématique :– Comment déterminer graphiquement les vitesses des solides dans les systèmes mécaniques ?
Savoir
Savoirs :Résoudre :– Rés-C1-S2 : Déterminer graphiquement le champ des vecteurs vitesses des points d’un solide dans le cas de
mouvements plan sur plan.
1 Cinématique plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
1.1 Forme du torseur cinématique pour des mouvements plans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Représentation du vecteur vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Champ des vitesses pour un solide en translation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
1.4 Champ des vitesses pour un solide en rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5 Notion de point appartenant à deux solides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Résolution des problèmes graphiques en utilisant l’équiprojectivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Résolution des problèmes graphiques en utilisant les centres instantanés de rotation . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Ce document est en évolution permanente. Merci de signaler toutes erreurs ou coquilles.
2013 – 2014Xavier PESSOLES
1 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
1 Cinématique plane
Définitio
n
Problème plan
Soient deux solides S1 et S2 en mouvement l’un par rapport à l’autre auxquels on associe les repères R0 et R1. Leproblème est dit plan lorsque
∀t ∈R+,−→z 1 ∧−→z 0 =−→0
Le mouvement est alors contenu dans le planP−→x1 ;−→y1
.
1.1 Forme du torseur cinématique pour des mouvements plans
Résultat
Torseur cinématique
Lorsqu’un mouvement a lieu dans le plan−→x ;−→y
, le torseur cinématique associé au mouvement est de la forme :
V (S2/S1)=
˜ ux
˜ u y
ωz ˜
O,R
Exem
ple
Donner les torseurs associés aux liaisons suivantes dans le plan−→x ;−→y
.
L (3/2) L (4/3)Sphère cylindre
de normale −→x
Sphère cylindre
de normale −→z
1.2 Représentation du vecteur vitesse
Définitio
n
Le vecteur vitesse est représenté par un glisseur. Ce glisseur est caractérisé par :– une direction ;– un sens ;– une norme ;– un point d’application.En cinématique graphique, déterminer le vecteur vitesse revient à déterminer les glisseurs de chacun des points.
Exem
ple
Représentation d’un glisseur
2013 – 2014Xavier PESSOLES
2 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
Exem
ple
1.3 Champ des vitesses pour un solide en translation
Résultat
Soit un solide S2 en translation par rapport à un solide S1. Connaissant−−−−−−−−→V (A ∈S2/S1), on a :
∀M ∈S2,−−−−−−−−−→V (M ∈S2/S1) =
−−−−−−−−→V (A ∈S2/S1)
Exem
ple
Tracer−−−−−−−→V (B ∈ 3/4) et
−−−−−−−→V (D ∈ 4/3).
1.4 Champ des vitesses pour un solide en rotation
Résultat
Soit un solide S2 en rotation par rapport à un solide S1. Soit O le centre de la liaison. On a donc,−−−−−→Ω(S2/S1) =ω
−→z ,ω
étant une vitesse de rotation exprimée en r a d /s . Soit un point A appartenant au planP−→x0 ;−→y0
tel que−→OA = r−→x1
D’après la relation du champ de moment,
−−−−−−−−→V (A ∈S2/S1) =
−−−−−−−−→V (O ∈S2/S1)+
−→AO ∧
−−−−−→Ω(S2/S1) = rω−→y1
2013 – 2014Xavier PESSOLES
3 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
Exem
ple
Tracer−−−−−−−→V (B ∈ 1/0) Tracer
−−−−−−−→V (C ∈ 1/0)
Donner ||−−−→Ω(1/0)||
1.5 Notion de point appartenant à deux solides
Résultat
Soient deux solides S1 et S2. La liaisons entre les deux solides est de centre A et ne permet aucune translation dansP . Soit S0 le bâti. On a alors :
−−−−−−−−→V (A ∈S2/S0) =
−−−−−−−−→V (A ∈S2/S1)︸ ︷︷ ︸
−→0
+−−−−−−−−→V (A ∈S1/S0)
Exem
ple
Déterminer−−−−−−−→V (D ∈ 5/3) et
−−−−−−−→V (D ∈ 5/2).
2013 – 2014Xavier PESSOLES
4 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
2 Résolution des problèmes graphiques en utilisant l’équiprojectivité
Résultat
Equiprojectivité
Soit un solide S1 en mouvement par rapport à un repère fixeR0. Soient deux points A et B appartenant au solide S1.On démontre qu’à chaque instant t :
−−−−−−−−−→V (A ∈S1/R0) ·
−→A B =
−−−−−−−−−→V (B ∈S1/R0) ·
−→A B
Exem
ple
Interprétation graphique
Démonstration
D’après la relation du champ de moment,
−−−−−−−−−→V (B ∈S1/R0) =
−−−−−−−−−→V (A ∈S1/R0)+
−→BA ∧
−−−−−−→Ω(S1/R0)
⇐⇒−−−−−−−−−→V (B ∈S1/R0) ·
−→A B =
−−−−−−−−−→V (A ∈S1/R0) ·
−→A B +
−→BA ∧
−−−−−−→Ω(S1/R0)
· −→A B︸ ︷︷ ︸
=−→
A B∧−→BA
·−−−−−→Ω(S1/R0)=0
CQFD
Métho
de
1. Identifier les données connues :– fréquence de rotation des moteurs ;– vitesse de déplacement des vérins ...
2. Tracer les vecteurs vitesses connus en respectant l’échelle
3. Identifier la direction du vecteur vitesse aux points caractéristiques du mécanisme
4. Utiliser la décomposition du vecteur vitesse si besoin
5. Tracer le vecteur vitesse final en utilisant l’équiprojectivité
6. Mesurer la norme du vecteur vitesse et comparer avec le cahier des charges.
2013 – 2014Xavier PESSOLES
5 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
3 Résolution des problèmes graphiques en utilisant les centres instantanésde rotation
Définitio
n
Glisseur
Soit le torseur suivant :
V (S2/S1)=
( −−−−−→Ω(S2/S1)−−−−−−−−→V (A ∈S2/S1)
)
A
V est un glisseur si et seulement si :
–−−−−−→Ω(S2/S1) 6=
−→0 ;
–−−−−−→Ω(S2/S1) ·
−−−−−−−−→V (A ∈S2/S1) = 0.
Résultat
Centre instantané de rotation - CIR
Au vu de la forme des torseurs en cinématique plane, le torseur cinématique est un glisseur. Il existe donc un point
I tel−−−−−−−−→V (I ∈S2/S1) =
−→0 .
I est appelé le centre instantané de rotation du solide 1 par rapport au solide 2. On le note I21.
L’axe instantané est de même direction que−−−−−→Ω(S2/S1). Il est perpendiculaire au plan du mouvement.
Résultat Construction du CIR
−−−−−−−−→V (A ∈S2/S1) et
−−−−−−−−→V (B ∈S2/S1) étant connu, I12 est à l’intersection des perpendiculaires aux vecteurs vitesses en A et
en B .
Exem
ple
Interprétation graphique
Rem
arqu
e
– Pour un solide en translation, le CIR n’existe pas.– Pour un solide en rotation autour d’un point fixe, le CIR est au centre de la liaison.– Pour un mouvement plan quelconque, le CIR change à chaque instant.
2013 – 2014Xavier PESSOLES
6 CI 3 : CIN – CoursCh. 8 : Cinématique graphique

Sciences Industriellesde l’Ingénieur
Définitio
n Base et roulante
Soit un solide S1 en mouvement dans un solideR0. On appelle base la trajectoire du CIR par rapport àR . On appelleroulante la trajectoire du CIR par rapport à S1.
Théorèm
e
Soient 3 solides S1, S2 et S3 en mouvement plan. I12, I23 et I13 sont alignés
Résultat
L’alignement des CIR peut permettre de déterminer la direction d’un vecteur vitesse.
Exem
ple
Agitateur médical
Système à double excentrique (transformation d’un mouvement de rotation continue en rotation discontinue). Lessolides S1 et S3 sont en liaison pivot avec le bâti S0. La bielle S2 est en liaison pivot avec S1 et S3.
Mouvement de 1/0 rotation autour de l’axe (O1,−→z 0 ) : CIR I1/0 =O1. Liaison 2/1 pivot d’axe (A,−→z 0 ) : CIR I2/1 = A : CIR I2/0
est sur l’axe (O1A).
Mouvement de 3/0 rotation autour de l’axe (O3,−→z 0 ) : CIR I3/0 =O3. Liaison 3/2 pivot d’axe (B ,−→z 0 ) : CIR I3/2 = B : CIRI2/0 est sur l’axe (O3 B ).
On en déduit I2/0 intersection entre les droites (O3 B ) et (O1A).
On connaît le CIR I1/0 =O1 et le CIR I3/0 =O3 par conséquent le CIR I3/1 est sur l’axe (O1O3).
On connaît le CIR I3/2 = A et le CIR I2/1 = B par conséquent le CIR I3/1 est sur l’axe (A B ).
On en déduit I3/1 intersection entre les droites (O1O3) et (A B ).
2013 – 2014Xavier PESSOLES
7 CI 3 : CIN – CoursCh. 8 : Cinématique graphique