Embed Size (px)
Citation preview
UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire
MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Electrotechnique
Spécialité : Machines électriques et électronique de puissance
Présenté par :
BEN HAMMOU Mabrouk ET GUERROUT Bachir
Thème:
Devant le jury :
Année Universitaire 2016/2017
Mr : KHETTECHE Laid MA (A) Président UKM Ouargla
Mr : ZEHANI Soraya MA (A) Encadreur/rapporteur UKM Ouargla
Mr : LAAMAYAD Tahar MC (B) Examinateur UKM Ouargla
Commande sans capteur de vitesse d’une
machine asynchrone double étoiles
Remerciements
Remerciements
Mes premiers mots de remerciement s’adressent au bon Dieu tout puissant qui nous a
inspiré de santé, volonté et patience pour achever ce travail. Je tiens à exprimer mon profond
remerciement au professeur Mr KHETTACH LAID, mon encadreur de mémoire à
l’université d’Ouargla pour m’avoir proposé ce sujet de master, l’avoir dirigé, ses conseils
avisés tout au long de la réalisation de ce travail.
Mes remerciements les plus respectueux aux membres du jury pour avoir accepté d’évaluer
ce travail ZEHANI Soraya et LAAMAYAD Tahar.
Je dédie Je dédie Je dédie Je dédie CeCeCeCe modeste travail modeste travail modeste travail modeste travail àààà::::
Mes chers parentsMes chers parentsMes chers parentsMes chers parents MON PEREMON PEREMON PEREMON PERE etetetet MA MA MA MA
MMMMEEEERERERERE, pour, pour, pour, pour tous leurs sacrifices,tous leurs sacrifices,tous leurs sacrifices,tous leurs sacrifices,
AmiAmiAmiAmissss,,,, frères frères frères frères ETETETET sœurssœurssœurssœurs,,,,
TousTousTousTous mes mes mes mes AmisAmisAmisAmis et ma familleet ma familleet ma familleet ma famille....
Sommaire
Notations et symboles……………………………………………………..
Listes des figures………………………………………………………………...
Introduction générale……………………………………………………. 02
Chapitre I : Modélisation de la Machine Asynchrone double étoile
I. .1 Introduction les machines asynchrones double étoile………………….. 04
I. .2 Principe de fonctionnement de la machine asynchrone double étoile…. 04
I. .3 Avantage et inconvénients du moteur asynchrone double étoile………. 05
I.3.1. Avantage de la MASDE…………………………………………. 05
I.3.2.inconvénients de la MASDE…………………………………………. 05
I.4 .Modélisation de la machine asynchrone double étoile………………… 05
I.4 1.Description…………………………………………………………… 05
I.4.2.Hypothèses de la MASDE …………………………………………… 06
I.5. Modèle triphasé de la MASDE sur les axes reels………………………… 07
I.5. .1 Les équations électriques……………………………………………... 07
I.5. .2 Équations magnétique……………………………………………….. 08
I.5. .3 Equation mécanique…………………………………………………. 10
I.6. Modèle biphasé………………………………………………………… 10
I.7. Choix du référentiel.............................................................................. 12
I.7.1. Référentiel lié au stator………………………………………………. 12
I.7.2. Référentiel lié au rotor………………………………………………. 12
I.7.3. Référentiel lié au champ tournant…………………………………... 12
I.8. Application de la transformation de Park……………………………... 12
I.8.1. Equations des tensions……………………………………………….. 12
I.8.2. Equations des flux…………………………………………………… 14
I.8.3. Equation mécanique …………………………………………….. 14
I.9. Schéma bloc d’une machine asynchrone double étoile ……………….. 17
I.10.Les courbes Fonctionnement en charge ……………………………… 18
Sommaire
I.11. Interprétations des résultats………………………………………….. 19
II.12.Conclusion………………………………………………………….. 20
Chapitre II : la commande vectorielle de la MASDE
II.1.Introduction ………………………………………………………….. 22
II.2. Principe de la Commande Vectorielle………………………………… 22
II.3. Procède D’orientation du flux………………………………………… 23
II.4. Méthodes de la Commande Vectorielle……………………………... 24
II.4.1. Méthode directe…………………………………………………… 25
II.4.2. Méthode indirecte…………………………………………………… 25
II.5. Commande vectorielle indirecte avec régulateur de vitesse………….. 25
II.5.1. Synthèse des régulateurs PI………………………………………… 28
II.5.1. 1.Calcul des paramètres du régulateur des courants ……………… 28
II.5.1. 2.Calcul des paramètres du régulateur de vitesse…………………… 31
II.6. Bloc de défluxage……………………………………………………... 31
II.7. Schéma bloc………………………………………………………….. 32
II.8.Interprétations des résultats…………………………………………. 33
II.8. Conclusion…………………………………………………………...... 35
Chapitre III : Commande sans capteur de vitesse par la méthode
MRAS
III.1. Introduction ………………………………………………………….. 38
III.2. Le système adaptatif à modèle de référence (MRAS)………………...
III.2.1.Modèles basés sur le flux rotorique ………………………………...
38
39
III.3 La méthode MRAS basée sur la puissance réactive…………………... 39
III.3.1 Calcul de la puissance réactive……………………………………... 39
III.3.2 Mécanisme d'adaptation……………………………………………. 41
III.3.2.1 Description générale……………………………………………… 41
III.3.2.2 Application à la commande vectorielle…………………………... 43
III.4 Schéma globale de la commande DRFOC sans capteurs…………….. 43
Sommaire
III.5 Résultats de simulation……………………………………………….. 44
III.5.1 Test de variation paramétrique (robustesse)…………………….. 47
III.6 Conclusion …………………………………………………………… 47
Conclusion générale……………………………………………………….. 49
Annexe : paramètres de la (MASDE)……………………………………… 50
Références bibliographiques…………………………………………….. 51
Notations et symboles
Notations et symboles
MASDE Machine asynchrone double étoile.
S, R Indices respectifs du stator et du rotor.
FOC Commande vectorielle.
IFOC Commande vectorielle indirecte.
MRAS Système adaptatif à modèle de référence.
As1, Bs1, Cs1 Indices correspondants au trois phases de l'enroulement statorique 1
As2, Bs2, Cs2 Indices correspondants au trois phases de l'enroulement statorique 2
Ar, Br, Cr Indices correspondants au trois phases rotorique.
d1, q1, d2, q2 Axes correspondants au référentielles de PARK.
Rs1, Rs2 Résistances des enroulements statoriques 1 et 2.
Rr Résistance de l'enroulement rotorique.
Ls1, Ls2 Inductances propres de fuites statorique 1 et 2.
Lr Inductance propre de fuites rotorique.
Lm Inductance mutuelle entre les enroulements 1et 2 du stator et rotor.
Ls1, r et Ls2,r Inductances mutuelles entre phases statoriques et rotoriques.
Ls1, s2 Inductance mutuelle entre phases des enroulements 1 et 2 du stator.
φs1, φs2 Flux statorique.
Φr Flux rotorique.
φrd ou phrd Flux rotorique sur l'axe d.
φrq ou phrq Flux rotorique sur l'axe q.
Tr Constante de temps rotorique.
P Nombre de paire de pôles.
Cem ou Cem Couple électromagnétique.
J Moment d'inertie.
Kf Coefficient de frottement.
Cr Couple résistant.
Vitesse angulaires électriques statorique.
ωr ou wr Vitesse angulaires électriques rotorique.
Wgl Vitesse angulaires électriques de glissement.
Wr Vitesse mécanique du rotor.
Angle de déphasage entre les deux systèmes d'alimentation du
stator.

Notations et symboles
Angle de déphasage physique entre les deux bobines du stator.
Angle entre l’enroulement statorique 1 et l’axe d.
Angle entre l’enroulement statorique 1 et la première phase du rotor.
Angle entre la première phase du rotor et l’axe d.
∗ ou é Vitesse de référence.
∗ ou ℎé Flux rotorique de référence.
Cem ou é Couple électromagnétique de référence.
[M ]1et 2 Indice de modulation.
[R] Taux de modulation.
V Tension simple de phase.
Courants d'une phase de l'enroulement statorique 1.
Courants d'une phase de l'enroulement statorique 2.
Paramètre de l'action proportionnelle.
Paramètre de l'action intégrale.
∗ Flux rotorique estimé.
∗ Vitesses angulaires électriques statorique estimée.
L’erreur entre la valeur réelle et la valeur estimée.
Listes des figures
Listes des figures
Page
Chapitre I :Modélisation et simulation de la machine asynchrone double étoile
Figure (I.1) : Modes de fonctionnement suivant le glissement 05 Figure (I.2) : Représentation des enroulements de la MASDE 06
Figure (I.3) : Représentation des enroulements statoriques et rotoriques de la MASDE 7
Figure (I.4) : Représentation schématique du modèle de Park de la MSADE 12
Figure (I.5) : Schéma bloc de simulation de la MASDE 17
Figure (I.6) :La vitesse de rotation 18
Figure (I.7) : Le couple électromagnétique 18
Figure (I.8): Le courantsstatoriques. 19
Figure (I.9): Le courantsrotoriques 19
Figure (I.10): Le fluxe rotoriques 19
Chapitre II: commande vectorielle de la machine asynchrone double étoile
Figure (II.1) : Principe de la commande vectorielle 23
Figure (II.2) :Orientation du flux rotorique sur l’axe d 24
Figure (II.3) :Bloc de commande à flux Orienté 26
Figure (II.4) :Schéma de régulation des courants 28
Figure (II.5) :Bloc de découplage en tension (FOC) 30
Figure (II.6): Schéma réduit de régulation de vitesse 31
Figure (II.7) :Bloc dé fluxage 32
Figure (II.8) :Régulation de la vitesse par la méthode indirecte 32
Figure (II.9) :La vitesse de rotation 33
Figure (II.10) :La couple électromagnétique 33
Figure (II.11) :La courante statorique(iqs1-iqs2) 34
Figure (II.12) :La courante rotorique(iqr-idr) 34
Listes des figures
Figure (II.13) :La courante statorique (ids1-ids2) 35
Figure (II.14): Le fluxe rotoriques 35
Chapitre III : Commande sans capteur de vitesse par la méthode MRAS
Figure.III.1:Configuration de base de la méthode MRAS 38
Figure.III.2: Elaboration de la méthode MRAS à puissance réactive 41
Figure.III.3:système à rétroaction 42
Figure.III.4: système à rétroaction équivalent de la MRAS 42
Figure.III.5: Commande Vectorielle indirecte d'une MASDE et MRAS 43
Figure.III.6: Représentation de vitesse mécanique et estimé de MASDE Avec et sans
variation paramétrique
44
Figure.III.7: Représentation des courants statorique-1 (direct, quadrature) MASDE Avec
et sans variation paramétrique
45
Figure.III.8: Représentation du couple électromagnétique de MASDE 45
Figure.III.9: Représentation des courants rotorique (direct, quadrature) MASDE Avec et
sans variation paramétrique
46
Introduction générale
Introduction Générale
Page 2
Introduction Générale
Depuis la fin des années 1920, les machines à deux enroulements triphasés au stator
Avaient été introduites pour accroitre la puissance des alternateurs synchrones de très forte
Puissance. Les machines multipages ont par la suite fait un intérêt grandissant, et en
particulier
La machine asynchrone double étoile (MASDE), qui présente en plus des avantages Des
machines asynchrones à cage, ceux des machines multipages. En effet, les variateurs Multi
phases présentent plusieurs avantages par rapport aux machines conventionnelles triphasées,
Tels que : segmentation de puissance, minimisation des ondulations du couple et des Pertes
rotoriques, réduction des courants harmoniques, grande fiabilité et forte puissance Etc. [15],
[16], [23].
La commande vectorielle (FOC) constitue actuellement un domaine de recherche
particulièrement intéressant, sa plage s'étend des petites puissances jusqu'aux entraînements
de grandes puissances. Elle est l'évolution du contrôle scalaire tout en maintenant ses
performances en régimes transitoires. La grande différence entre ces deux stratégies de
commande, réside dans le fait que pour un contrôle vectoriel les paramètres de la machine
doivent être connus assez précisément, la dynamique du contrôle devient de plus en plus
efficace avec une bonne connaissance paramétrique.
la modélisation et l’analyse de la MASDE, constituent les trois chapitres faisant l’objet
de ce mémoire.
L’objectif principal de ce travail est l’étude d’une commande sans capteur de la machine
asynchrone double étoiles. Donc ce travail nous avons présenté la synthèse de loi de
commande et plus précisément une synthèse de deux stratégies de commande ,la commande
vectorielle et , commande sans capteur et puis nous allons appliqué de cette technique sur la
machine asynchrone double étoiles.
Dans le premier chapitre nous proposons une modélisation classique du moteur
asynchrone en utilisant la transformation de Park (triphasée / biphasée).
Le deuxième est consacré à la commande vectorielle indirecte par orientation du flux
rotorique et à la commande de l’onduleur.
Dans le troisième chapitre nous proposons une étude le technique système adaptatif à
modèle de référence (MRAS). L’un est basé sur le flux rotorique l’autre sur la puissance
réactive instantanée.
Introduction Générale
Page 3
Ce mémoire sera achevé par une conclusion générale sur la commande proposée de la
machine asynchrone double étoile, et les travaux qui peuvent être envisagés en perspectives.
Chapitre I
Modélisation et simulation de la machine asynchrone double
étoiles
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 4
I.1.Introduction
Ce chapitre permettra de présenter le principe de fonctionnement de la machine
asynchrone double étoile (MASDE), leurs applications, ses avantages et ses inconvénients.
D’autre part de modéliser de la machine électrique qui est basée sur la théorie unifiée des
machines électriques classiques, dites encore théorie généralisée.
Cette dernière est basée sur la transformation de Park qui rapporte les équations
électriques statoriques et rotoriques à des axes perpendiculaires électriquement (direct et en
quadrature), nous étudierons dans ce chapitre la MASDE directement alimentée par des
sources purement sinusoïdales et équilibrées. Enfin, des résultats de simulations seront
présentés et interprétés [1].
I.2 Principe de fonctionnement de la machine asynchrone double étoile
Les courants statoriques de la machine asynchrone double Etoile créent un champ
magnétique tournant dans les deux stators (l’étoile 1 alimenté par des courants triphasés et
l’étoile 2 alimenté par les mêmes courants triphasés mais décalé d’un angule α=30°). La
fréquence de rotation de ce champ est imposée par la fréquence des courants statoriques «fs»
c’est-à-dire que sa vitesse de rotation est proportionnelle à la fréquence de l'alimentation
électrique, la vitesse de ce champ tournant est appelée vitesse de synchronisme «». Elle
définit comme suite,[2].
=
[/]
Ces deux Champs tournants produisent par les deux enroulements statoriques vont induire
des courants dans les du rotor. Ainsi générant des forces électromotrices qui feront tourner le
rotor à une vitesse inférieure à celui du synchronisme ( < ), ainsi les effets de
l’induction statoriques sur les courants induits rotoriques se manifestent par l’élaboration
d’un couple de force électromagnétique sur le rotor tel que l’écart des vitesses soit réduit. La
différence de vitesse entre le rotor et le champ statorique est dite vitesse de glissement:
= − . [3]. On dira alors que ces deux champs glissent par rapport au rotor et on
définit ce glissement par le rapport :
=
=
Les différents modes de fonctionnement dépendent de la valeur du
glissement:
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 5
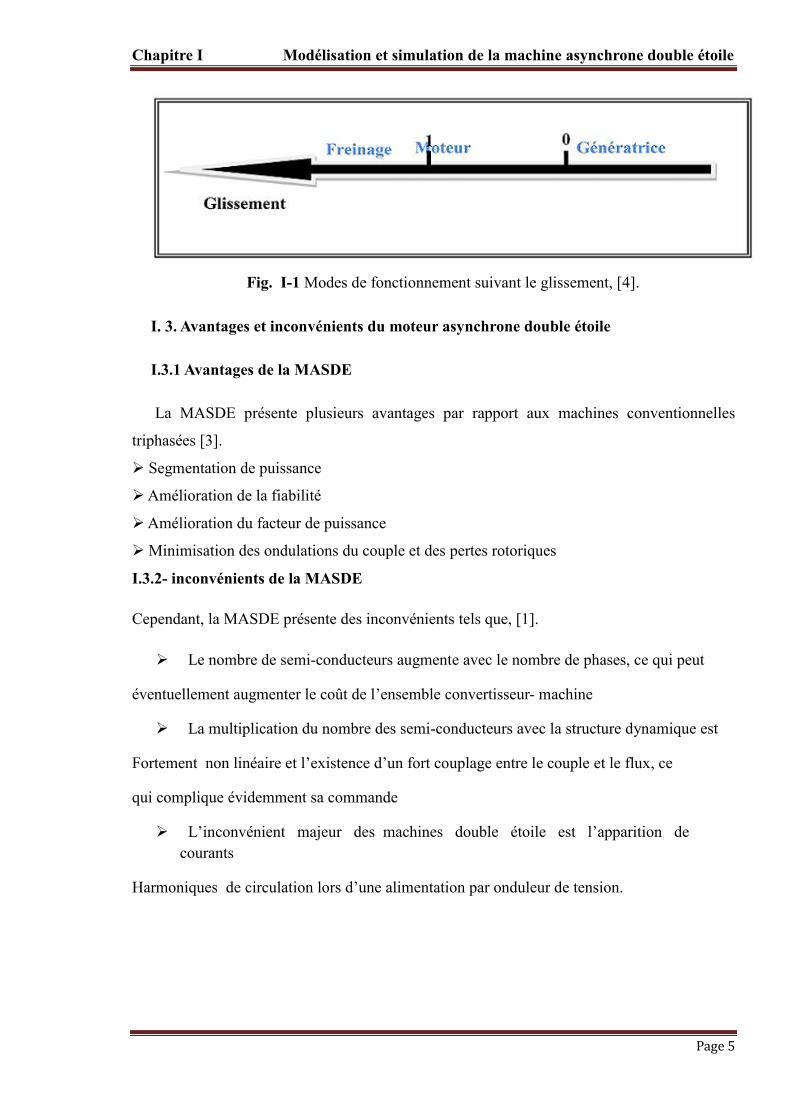
Fig. I-1 Modes de fonctionnement suivant le glissement, [4].
I. .3 Avantages et inconvénients du moteur asynchrone double étoile
I.3.1 Avantages de la MASDE
La MASDE présente plusieurs avantages par rapport aux machines conventionnelles
triphasées [3].
Segmentation de puissance
Amélioration de la fiabilité
Amélioration du facteur de puissance
Minimisation des ondulations du couple et des pertes rotoriques
I.3.2- inconvénients de la MASDE
Cependant, la MASDE présente des inconvénients tels que, [1].
Le nombre de semi-conducteurs augmente avec le nombre de phases, ce qui peut
éventuellement augmenter le coût de l’ensemble convertisseur- machine
La multiplication du nombre des semi-conducteurs avec la structure dynamique est
Fortement non linéaire et l’existence d’un fort couplage entre le couple et le flux, ce
qui complique évidemment sa commande
L’inconvénient majeur des machines double étoile est l’apparition de
courants
Harmoniques de circulation lors d’une alimentation par onduleur de tension.
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 6
.I.4: Modélisation de la machine asynchrone double étoile
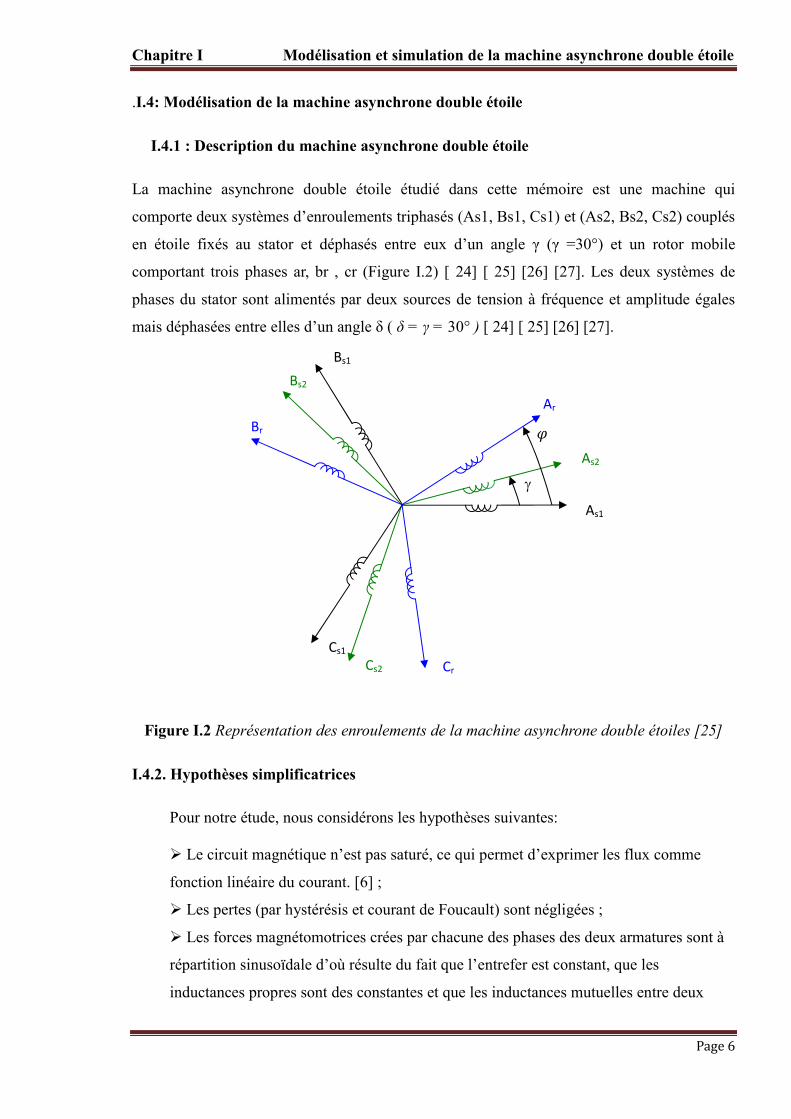
I.4.1 : Description du machine asynchrone double étoile
La machine asynchrone double étoile étudié dans cette mémoire est une machine qui
comporte deux systèmes d’enroulements triphasés (As1, Bs1, Cs1) et (As2, Bs2, Cs2) couplés
en étoile fixés au stator et déphasés entre eux d’un angle γ (γ =30°) et un rotor mobile
comportant trois phases ar, br , cr (Figure I.2) [ 24] [ 25] [26] [27]. Les deux systèmes de
phases du stator sont alimentés par deux sources de tension à fréquence et amplitude égales
mais déphasées entre elles d’un angle δ ( δ = γ = 30° ) [ 24] [ 25] [26] [27].
Figure I.2 Représentation des enroulements de la machine asynchrone double étoiles [25]
I.4.2. Hypothèses simplificatrices
Pour notre étude, nous considérons les hypothèses suivantes:
Le circuit magnétique n’est pas saturé, ce qui permet d’exprimer les flux comme
fonction linéaire du courant. [6] ;
Les pertes (par hystérésis et courant de Foucault) sont négligées ;
Les forces magnétomotrices crées par chacune des phases des deux armatures sont à
répartition sinusoïdale d’où résulte du fait que l’entrefer est constant, que les
inductances propres sont des constantes et que les inductances mutuelles entre deux
Bs1
As1
As2
Ar
Br
Cs1
Cs2 Cr
Bs2
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 7
enroulements sont fonction sinusoïdale de l’angle entre leurs axes magnétique [6] ;
Les résistances ne varient pas avec la température ;
Effet de peau négligé ;
La machine est de constitution symétrique.
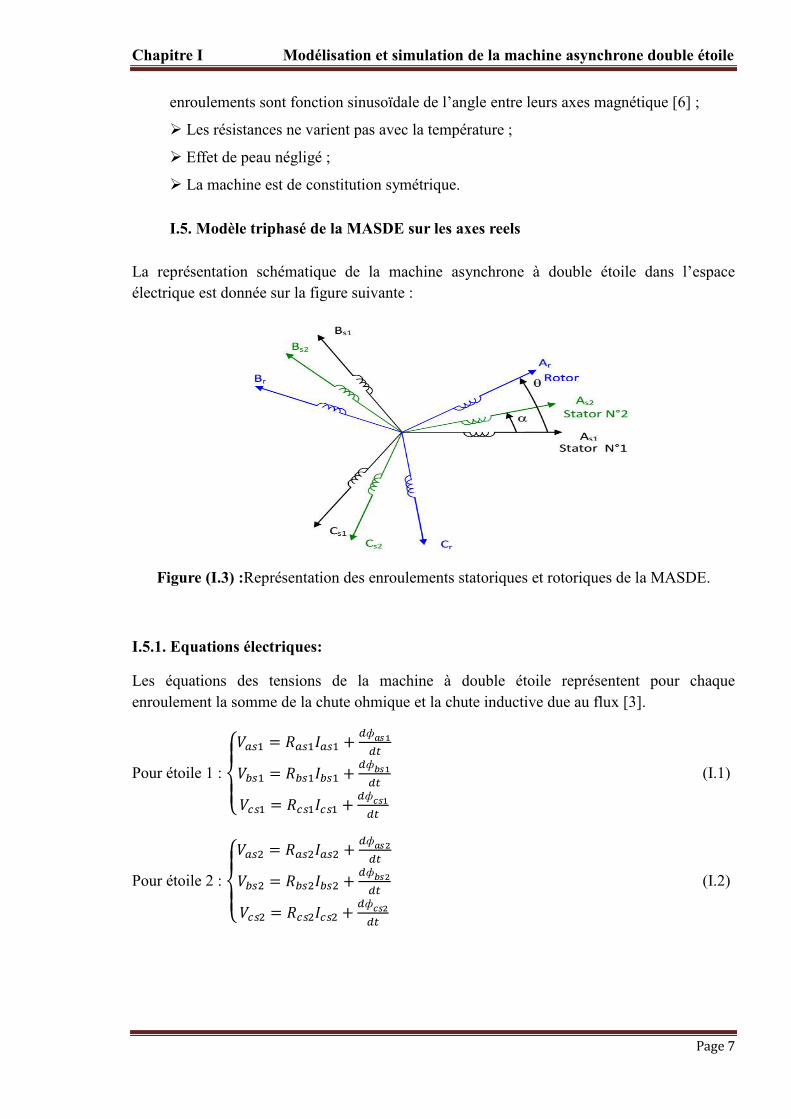
I.5. Modèle triphasé de la MASDE sur les axes reels
La représentation schématique de la machine asynchrone à double étoile dans l’espace
électrique est donnée sur la figure suivante :
Figure (I.3) :Représentation des enroulements statoriques et rotoriques de la MASDE.
I.5.1. Equations électriques:
Les équations des tensions de la machine à double étoile représentent pour chaque
enroulement la somme de la chute ohmique et la chute inductive due au flux [3].
Pour étoile 1 :
⎩⎪⎨
⎪⎧ = +
ф
= +ф
= +ф
(I.1)
Pour étoile 2 :
⎩⎪⎨
⎪⎧ = +
ф
= +ф
= +ф
(I.2)

Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 8
Pour le rotor :
⎩⎪⎨
⎪⎧0 = +
ф
0 = +ф
0 = +ф
(I.3)
Sous forme matricielle on a :
Pour étoile 1 : ,= [],+
∅,
Pour étoile 2 : ,= [],+
∅, (I.4)
Pour rotor : ,= [],+
∅,
On pose : = = = et = = =
[] =
0 00 00 0
; [] =
0 00 00 0
;[] = 0 00 00 0
:Résistance d’une phase statorique de l’étoile 1.
:Résistance d’une phase statorique de l’étoile 2.
: Résistance d’une phase rotorique.
1
1
1
1,
cs
bs
as
sabc
I
I
I
I ;
2
2
2
2,
cs
bs
as
sabc
I
I
I
I ;
cr
br
ar
rabc
I
I
I
I , .
1
1
1
1,
cs
bs
as
sabc
V
V
V
V ;
2
2
2
2,
cs
bs
as
sabc
V
V
V
V ;
cr
br
ar
rabc
V
V
V
V , .
1
1
1
1,
cs
bs
as
sabc
;
2
2
2
2,
cs
bs
as
sabc
;
cr
br
ar
rabc
, .
,,,,, :Matrices des courants statoriques de l’étoile 1,2 et des
courants
rotoriques.
,,,,,: Matrices des tensions statoriques de l’étoile 1,2 et des tensions
Rotoriques.
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 9
∅,,∅,,∅,: Matrices desflux statoriques de l’étoile 1,2 et des flux
Rotoriques.
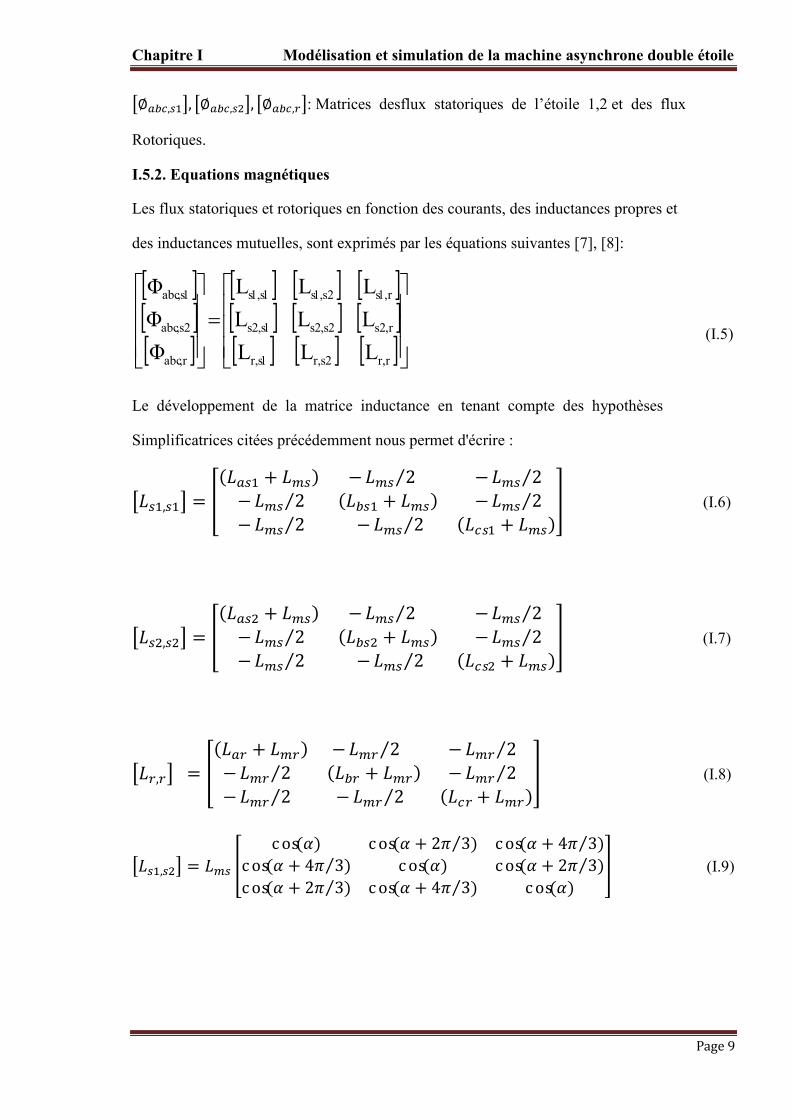
I.5.2. Equations magnétiques
Les flux statoriques et rotoriques en fonction des courants, des inductances propres et
des inductances mutuelles, sont exprimés par les équations suivantes [7], [8]:
r,rs,rs,r
r,ss,ss,s
r,ss,ss,s
r,abc
s,abc
s,abc
LLL
LLL
LLL
Φ
Φ
Φ
(I.5)
Le développement de la matrice inductance en tenant compte des hypothèses
Simplificatrices citées précédemment nous permet d'écrire :
,=
( + ) − 2 ⁄ − 2 ⁄
− 2 ⁄ ( + ) − 2 ⁄
− 2 ⁄ − 2 ⁄ ( + ) (I.6)
,=
( + ) − 2 ⁄ − 2 ⁄
− 2 ⁄ ( + ) − 2 ⁄
− 2 ⁄ − 2 ⁄ ( + ) (I.7)
, =
( + ) − 2 ⁄ − 2 ⁄
− 2 ⁄ ( + ) − 2 ⁄
− 2 ⁄ − 2 ⁄ ( + ) (I.8)
,=
cos() cos( + 2 3⁄ ) cos( + 4 3⁄ )
cos( + 4 3⁄ ) cos() cos( + 2 3⁄ )
cos( + 2 3⁄ ) cos( + 4 3⁄ ) cos()
(I.9)

Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 10
,=
() ( + 2 3⁄ ) ( + 4 3⁄ )
( + 4 3⁄ ) () ( + 2 3⁄ )
( + 2 3⁄ ) ( + 4 3⁄ ) ()
(I.10)
,=
( − ) ( − + 2 3⁄ ) ( − + 4 3⁄ )
( − + 4 3⁄ ) ( − ) ( − + 2 3⁄ )
( − + 2 3⁄ ) ( − + 4 3⁄ ) ( − ) (I.11)
,= ,; ,= ,
;,= ,
;
= = = : Iinductance propre du 1er stator.
= = = : Inductance propre du 2eme stator.
= = = : Inductance propre du rotor.
: La valeur maximale des coefficients d'inductance mutuelle statorique.
: La valeur maximale des coefficients d'inductance mutuelle rotorique.
: La valeur maximale des coefficients d'inductance mutuelle entre un stator et le rotor.
I.6.3. Equations mécaniques
L'équation mécanique de la machine s'écrit :
= − − Ω. (I.12)
Avec:
J : Moment d’inertie.
: Vitesse de rotation rotorique de la machine.
emC : Couple électromagnétique.
rC : Couple résistant (couple de charge).
fK : Cœfficient de frottement.
L'expression du couple électromagnétique est donnée par :
=
,
,,
+ ,
,,
(I.13)
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 11
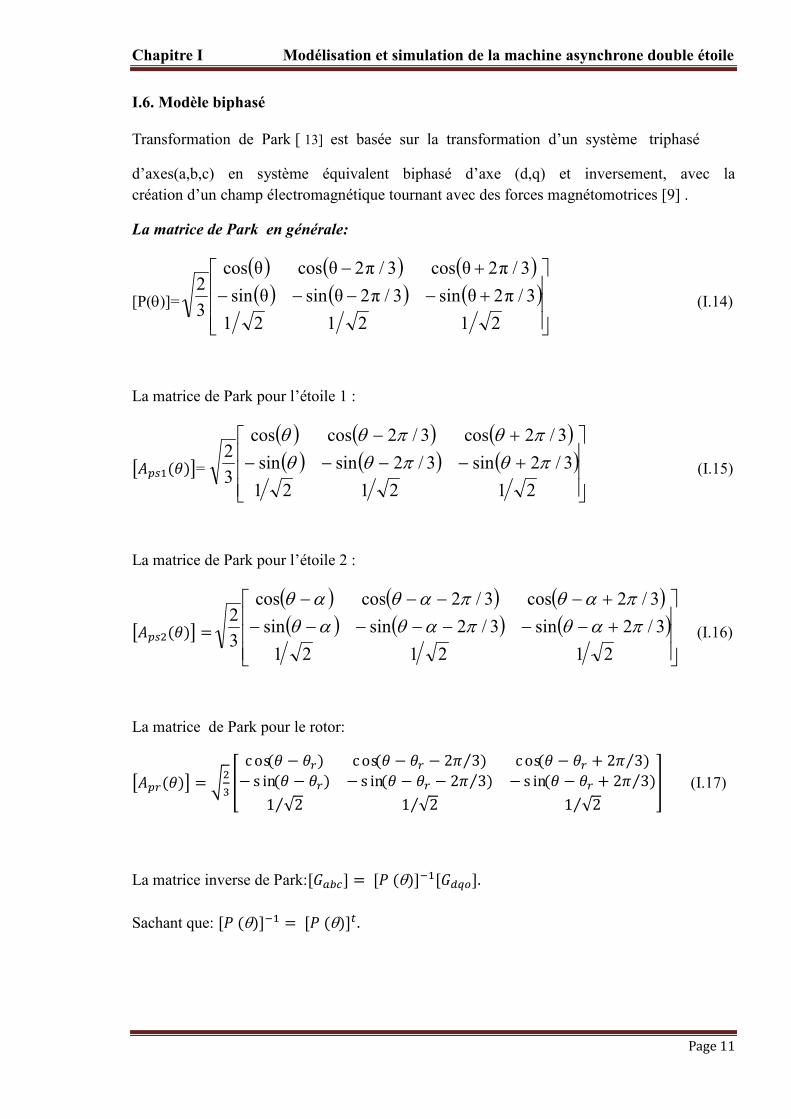
I.6. Modèle biphasé
Transformation de Park [ 13] est basée sur la transformation d’un système triphasé
d’axes(a,b,c) en système équivalent biphasé d’axe (d,q) et inversement, avec la
création d’un champ électromagnétique tournant avec des forces magnétomotrices [9] .
La matrice de Park en générale:
[P(q)]=
/πθsin/πθsinθsin
/πθcos/πθcosθcos
(I.14)
La matrice de Park pour l’étoile 1 :
()=
212121
3/2sin3/2sinsin
3/2cos3/2coscos
3
2qqq
qqq
(I.15)
La matrice de Park pour l’étoile 2 :
()=
212121
3/2sin3/2sinsin
3/2cos3/2coscos
3
2qqq
qqq
(I.16)
La matrice de Park pour le rotor:
()=
cos( − ) cos( − − 2 3⁄ ) cos( − + 2 3⁄ )
−sin( − ) −sin( − − 2 3⁄ ) −sin( − + 2 3⁄ )
1 √2⁄ 1 √2⁄ 1 √2⁄
(I.17)
La matrice inverse de Park:[] = [ (q)][].
Sachant que: [ (q)] = [ (q)].
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 12
[P(q)]-1=
213/2sin3/2cos
213/2sin3/2cos
21sincos
3
2
(I.18)
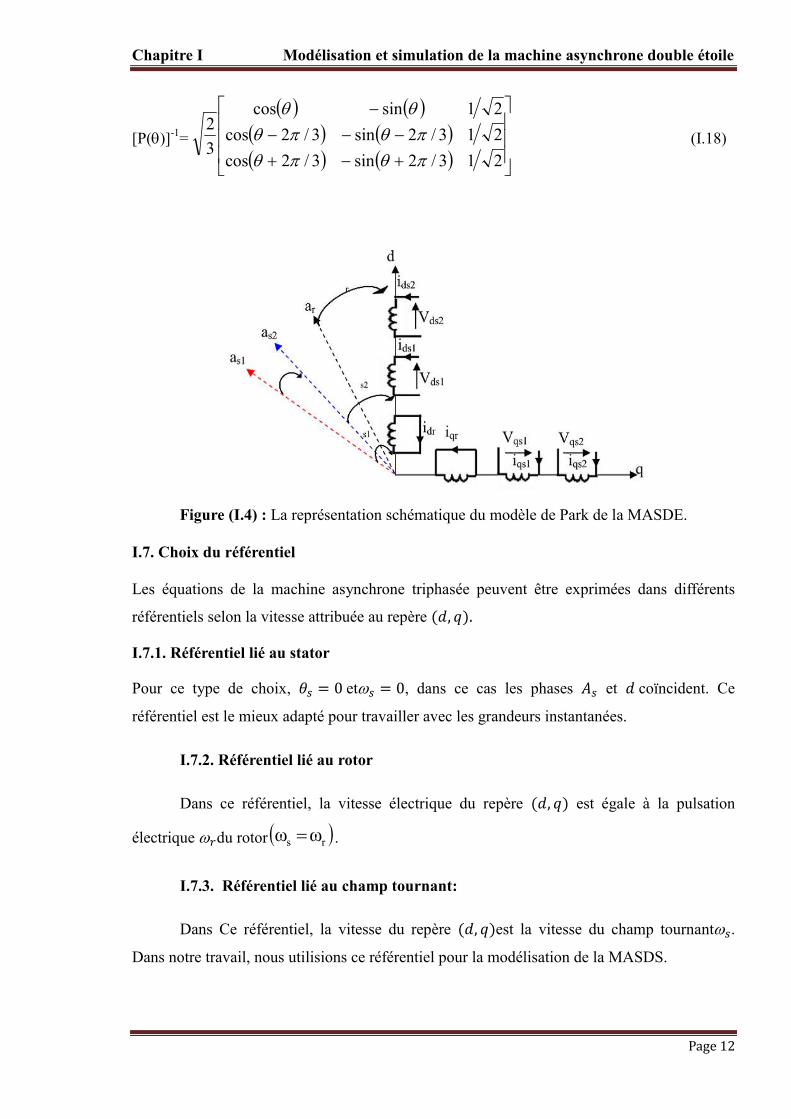
Figure (I.4) : La représentation schématique du modèle de Park de la MASDE.
I.7. Choix du référentiel
Les équations de la machine asynchrone triphasée peuvent être exprimées dans différents
référentiels selon la vitesse attribuée au repère (,).
I.7.1. Référentiel lié au stator
Pour ce type de choix, = 0 et = 0, dans ce cas les phases et coïncident. Ce
référentiel est le mieux adapté pour travailler avec les grandeurs instantanées.
I.7.2. Référentiel lié au rotor
Dans ce référentiel, la vitesse électrique du repère (,) est égale à la pulsation
électrique du rotor rs ωω .
I.7.3. Référentiel lié au champ tournant:
Dans Ce référentiel, la vitesse du repère (,)est la vitesse du champ tournant.
Dans notre travail, nous utilisions ce référentiel pour la modélisation de la MASDS.

Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 13
I.8. Application de la transformation de Park.
On choisi le référentiel lié au champ tournant et On applique la transformation de Park
Aux équations précédentes, nous obtenons le système d'équations suivant :
I.8.1. Equations des tensions
On applique la transformation de Park sur le système des équations (I.1), (I.2) et (I.3) on
Obtient :
Pour le stator 1 :
=
0 00 00 0
∅∅∅
+∅
0 −1 01 0 00 0 0
∅∅∅
(I.19)
Pour le stator 2:
=
0 00 00 0
∅∅∅
+∅
0 −1 01 0 00 0 0
∅∅∅
(I.20)
Pour le rotor : Le rotor étant en court-circuit :
= 0, = 0 , = 0
000 =
0 00 00 0
∅∅∅
+∅
0 −1 01 0 00 0 0
∅∅∅
(I.21)
Avec :
.)(
,)(
, 1121glrs
srs
sss
s
dt
d
dt
d
dt
d
dt
d
dt
d
qqq
q
Sous forme d’équation:
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 14
drgl
qr
qrr
qrgldr
drr
dss
qs
qssqs
qssds
dsssd
dss
qs
qssqs
qssds
dssds
Φωdt
ΦdiR
Φωdt
ΦdiR
Φωdt
ΦdiRv
Φωdt
ΦdiRv
Φωdt
ΦdiRv
Φωdt
ΦdiRv
(I.22)
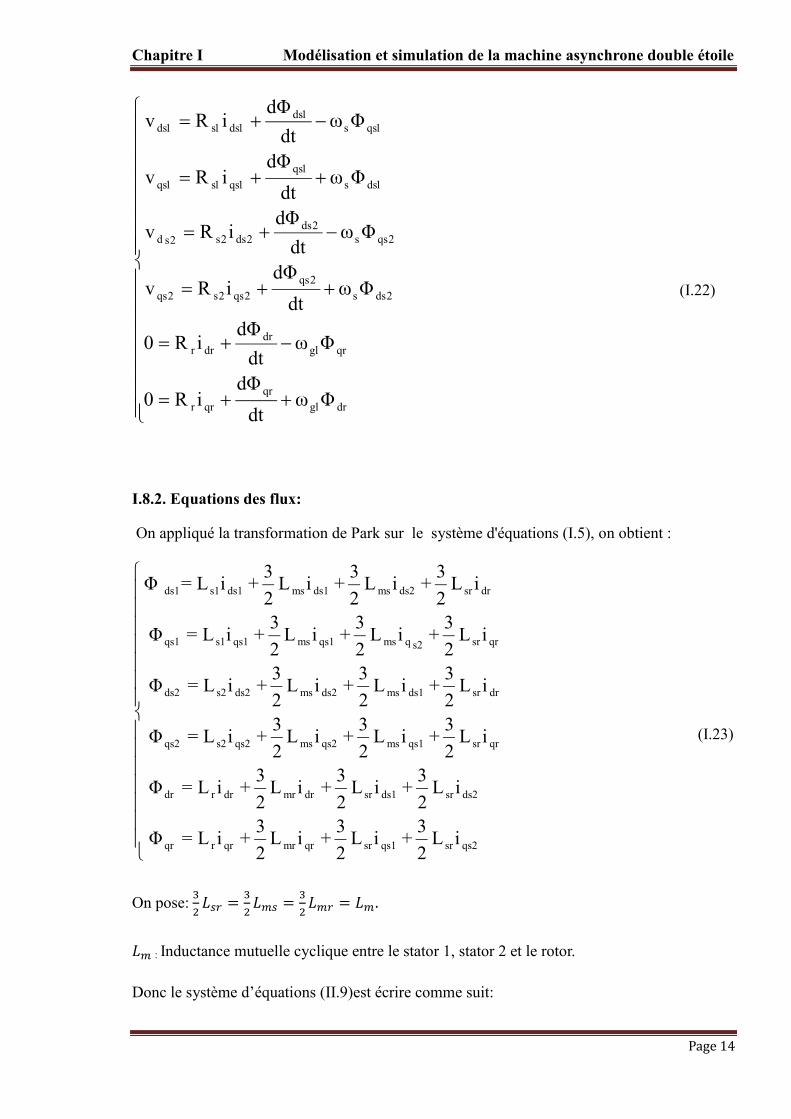
I.8.2. Equations des flux:
On appliqué la transformation de Park sur le système d'équations (I.5), on obtient :
iL 2
3+iL
2
3+iL
2
3 +iL=Φ
iL 2
3+iL
2
3+ iL
2
3 +iL=Φ
iL 2
3+iL
2
3+iL
2
3 +iL=Φ
iL 2
3+iL
2
3+iL
2
3+iL=Φ
iL 2
3+iL
2
3+iL
2
3 +iL=Φ
iL 2
3+iL
2
3+iL
2
3+iL= Φ
qs2srqs1srqrmrqrrqr
ds2srds1srdrmrdrrdr
qrsrqs1msqs2msqs2s2qs2
drsrds1msds2msds2s2ds2
qrsrs2qmsqs1msqs1s1qs1
drsrds2msds1msds1s1ds1
(I.23)
On pose:
=
=
= .
: Inductance mutuelle cyclique entre le stator 1, stator 2 et le rotor.
Donc le système d’équations (II.9)est écrire comme suit:
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 15
F
F
F
F
F
F
)i+i+(iL+iL=
)i+i+(iL+iL=
)i+i+(i L+iL=
)i+i+(i L+iL=
)i+i+(i L+iL=
)i+i+(i L+iL=
qrqs2qs1mqrrqr
drds2ds1mdrdr
qrqs2qs1mqs2s2qs2
drds2ds1mds2s2ds2
qrqs2qs1mqs1s1qs1
drds2ds1mds1s1ds1
r
(I.24)
Avec:
+ : Inductance propre cyclique du stator 1.
+ : Inductance propre cyclique du stator 2.
+ : Inductance propre cyclique du rotor.
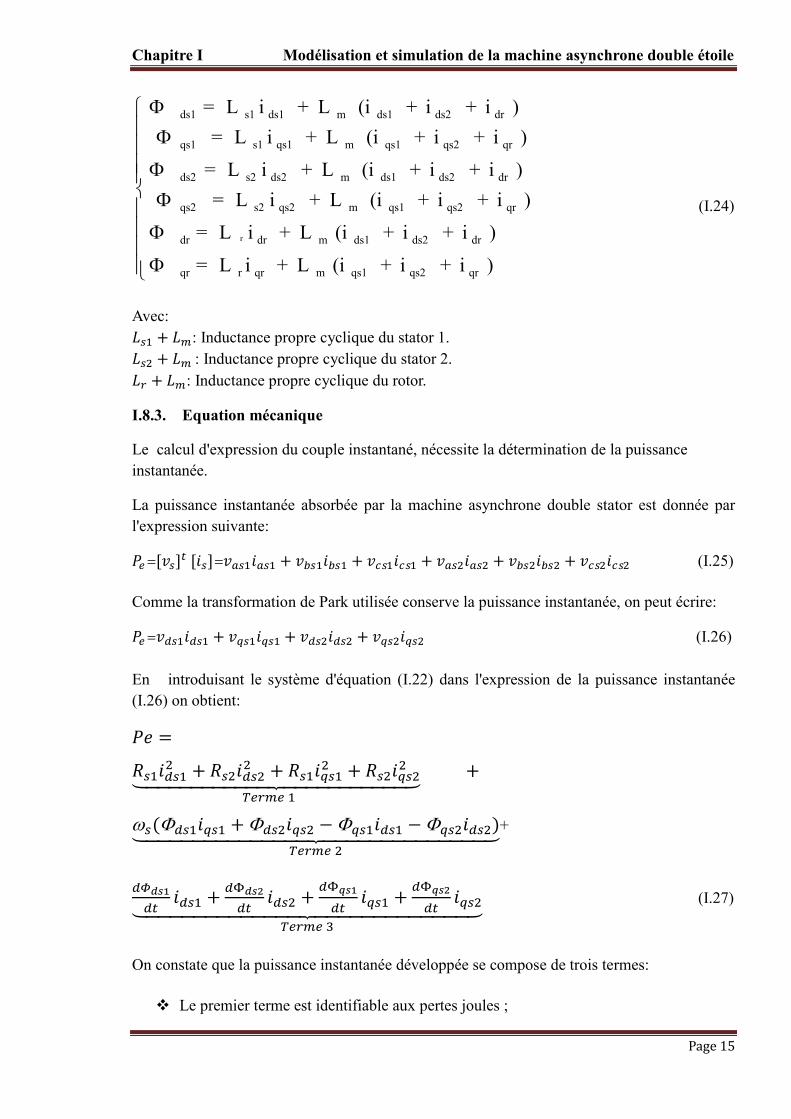
I.8.3. Equation mécanique
Le calcul d'expression du couple instantané, nécessite la détermination de la puissance
instantanée.
La puissance instantanée absorbée par la machine asynchrone double stator est donnée par
l'expression suivante:
[] [] + + + + + (I.25)
Comme la transformation de Park utilisée conserve la puissance instantanée, on peut écrire:
+ + + (I.26)
En introduisant le système d'équation (I.22) dans l'expression de la puissance instantanée
(I.26) on obtient:
=
+
+ +
+
(F + F −F −F)
+
+
+
+
(I.27)
On constate que la puissance instantanée développée se compose de trois termes:
Le premier terme est identifiable aux pertes joules ;

Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 16
Le second terme correspond à la puissance électromagnétique emmagasinée ;
Le troisième terme représente la puissance électrique transformée en puissance
mécanique (les pertes fer sont supposées négligeables).
La puissance et le couple électromagnétique peuvent s'écrire sous la forme:
= (F + F − F −F). (I.28)
= (F + F − F −F). (I.29)
Il est possible d'obtenir d'autres expressions du couple instantané en utilisant les expressions
des flux statoriques et en remplaçant (I.24) dans (I.29), on obtient:
. )i )i(i-i )i((i pLC qrds2ds1drqs2qs1mem (I.30)
Le couple électromagnétique peut être déduit à partir du flux rotorique:
F = + ( + + ).
F = + + + . (I.31)
=
F
−
( + ).
=F
−
+ .
(I.32)
En introduisant et dans l'expression (I.16), on obtient [9]:
= rm
m
LL
L
F + −F( + ). (I.33)
Le couple électromagnétique dans le repère de Park doit être multiplié par 3/2:
=3
2
rm
m
LL
L
F + −F( + ).
Enfin l'équation mécanique de la machine peut s'écrire comme suite:
= − − Ω . (I.34)
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 17
r
r
s
s
s
s
R
R
R
R
R
R
R
00000
00000
00000
00000
00000
00000
2
2
1
1
)(000
0)(00
0)(00
00)(0
00)(0
000)(
2
2
1
1
mrmm
mrmm
mmsm
mmsm
mmms
mmms
LLLL
LLLL
LLLL
LLLL
LLLL
LLLL
L
0)(00
)(000
00)(0
0)(00
000)(
00)(0
1
2
1
1
1
mrmm
mrmm
mmsm
mmsm
mmms
mmms
LLLL
LLLL
LLLL
LLLL
LLLL
LLLL
M
0)(00
)(000
000000
000000
000000
000000
2
mrmm
mrmm
LLLL
LLLL
M
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 18
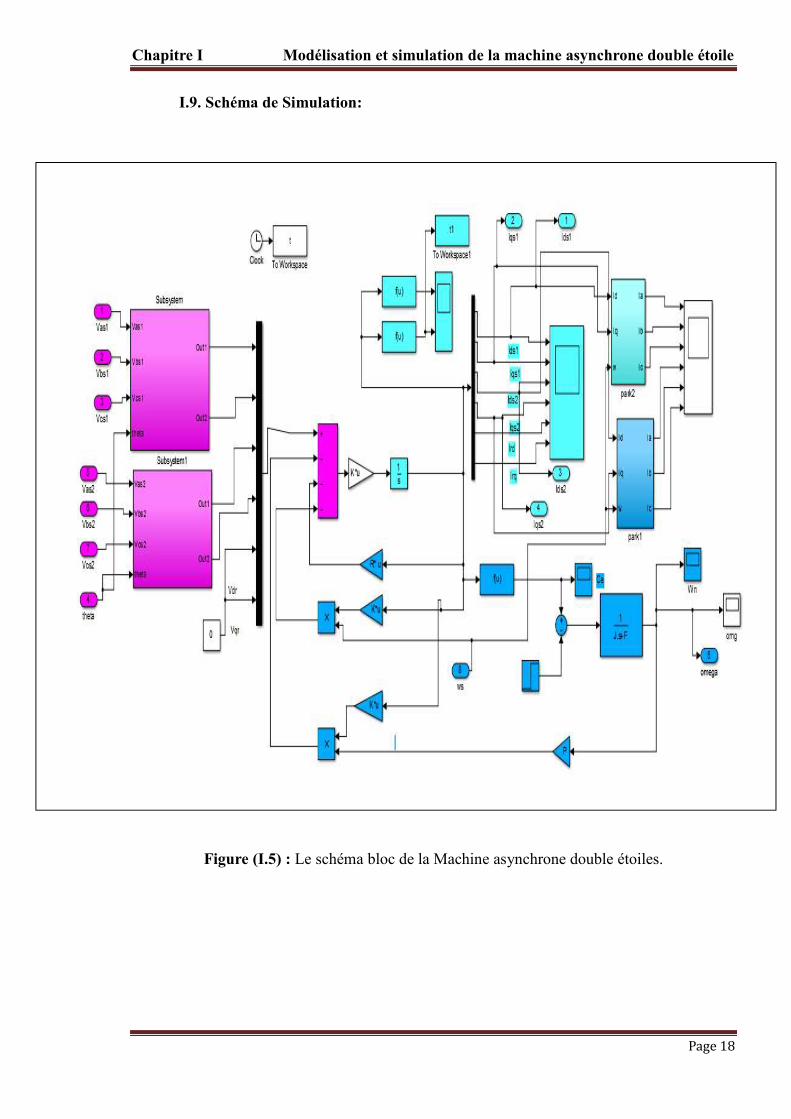
I.9. Schéma de Simulation:
Figure (I.5) : Le schéma bloc de la Machine asynchrone double étoiles.
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 19
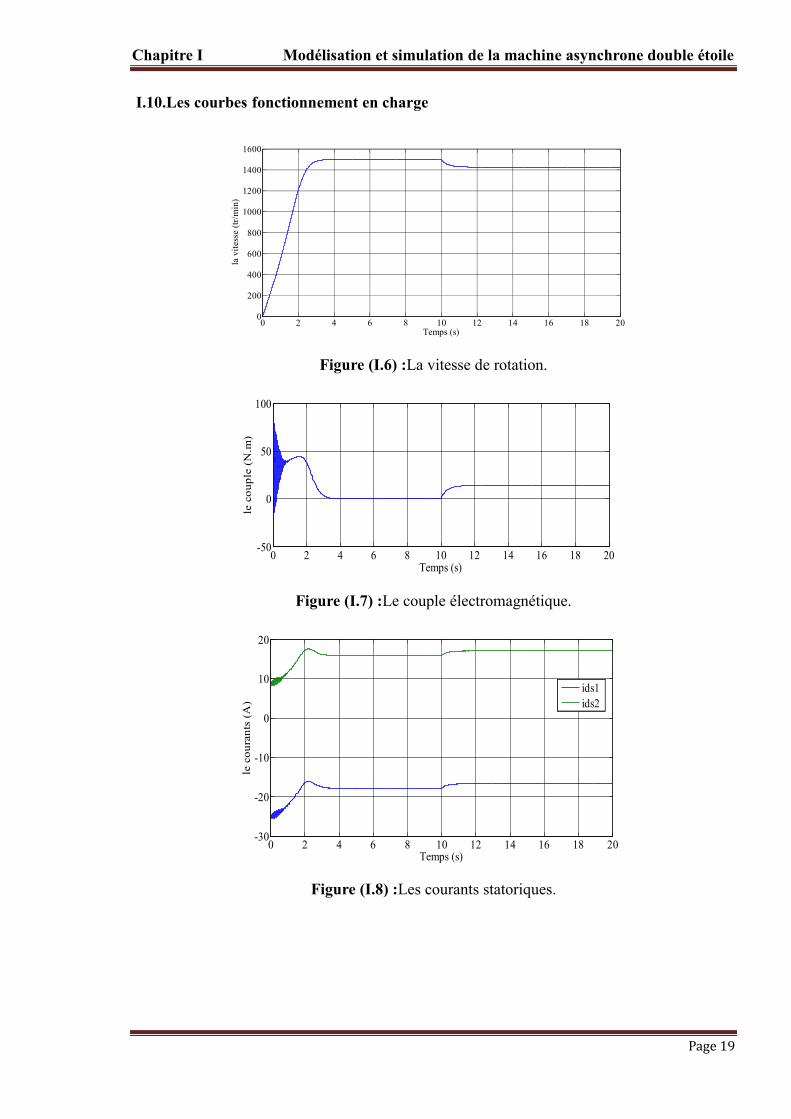
I.10.Les courbes fonctionnement en charge
Figure (I.6) :La vitesse de rotation.
Figure (I.7) :Le couple électromagnétique.
Figure (I.8) :Les courants statoriques.
0 2 4 6 8 10 12 14 16 18 200
200
400
600
800
1000
1200
1400
1600
Temps (s)
la v
ites
se (
tr/m
in)
0 2 4 6 8 10 12 14 16 18 20-50
0
50
100
Temps (s)
le c
ou
ple
(N
.m)
0 2 4 6 8 10 12 14 16 18 20-30
-20
-10
0
10
20
Temps (s)
le c
ou
ran
ts (
A)
ids1
ids2
Chapitre I Modélisation et simulation de la machine asynchrone double étoile
Page 20
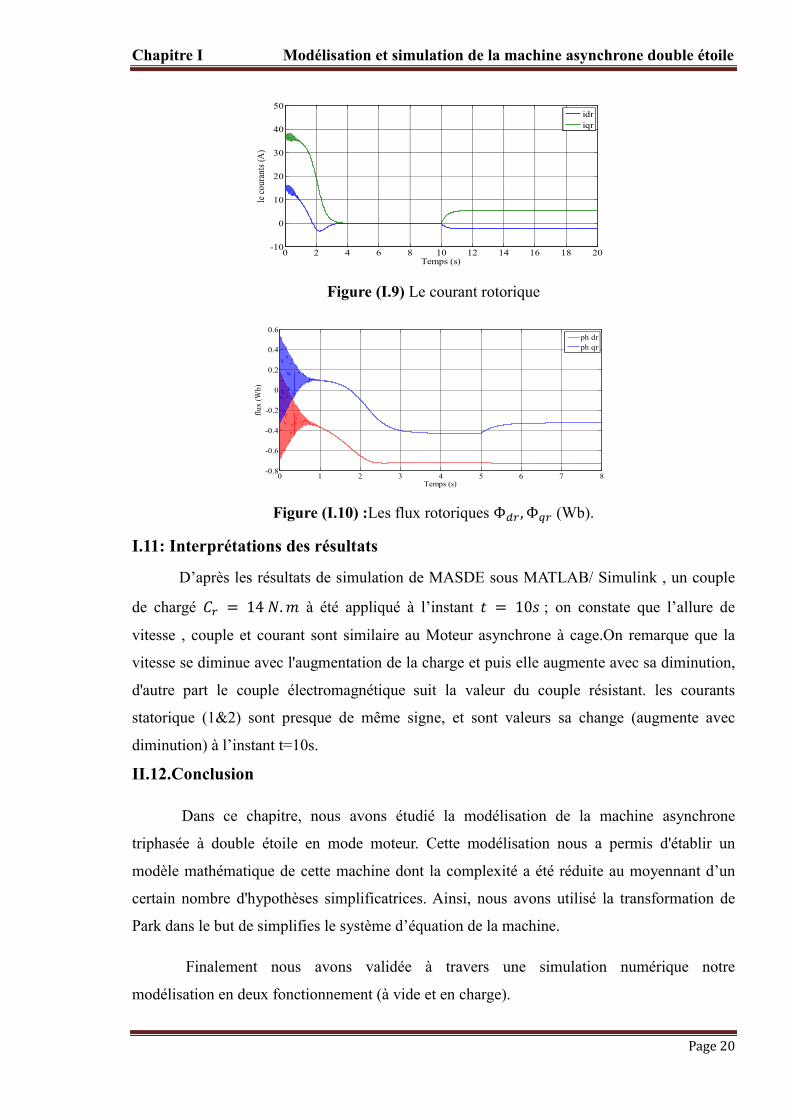
Figure (I.9) Le courant rotorique
Figure (I.10) :Les flux rotoriques Φ,Φ (Wb).
I.11: Interprétations des résultats
D’après les résultats de simulation de MASDE sous MATLAB/ Simulink , un couple
de chargé = 14 . à été appliqué à l’instant = 10 ; on constate que l’allure de
vitesse , couple et courant sont similaire au Moteur asynchrone à cage.On remarque que la
vitesse se diminue avec l'augmentation de la charge et puis elle augmente avec sa diminution,
d'autre part le couple électromagnétique suit la valeur du couple résistant. les courants
statorique (1&2) sont presque de même signe, et sont valeurs sa change (augmente avec
diminution) à l’instant t=10s.
II.12.Conclusion
Dans ce chapitre, nous avons étudié la modélisation de la machine asynchrone
triphasée à double étoile en mode moteur. Cette modélisation nous a permis d'établir un
modèle mathématique de cette machine dont la complexité a été réduite au moyennant d’un
certain nombre d'hypothèses simplificatrices. Ainsi, nous avons utilisé la transformation de
Park dans le but de simplifies le système d’équation de la machine.
Finalement nous avons validée à travers une simulation numérique notre
modélisation en deux fonctionnement (à vide et en charge).
0 2 4 6 8 10 12 14 16 18 20-10
0
10
20
30
40
50
Temps (s)le
cou
rant
s (A
)
idr
iqr
0 1 2 3 4 5 6 7 8-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Temps (s)
flux
(W
b)
ph dr
ph qr
Chapitre II
Commande vectorielle de la machine asynchrone double
étoiles
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 22
II.1.Introduction
La difficulté pour commander une machine asynchrone réside dans le fait qu'il existe
un couplage complexe entre les variables d'entrée, les variables de sortie et les variables
internes de la machine comme le flux, le couple et la vitesse ou la position. Parmi les
commandes scalaires proposées pour la commande de la machine on site la commande
=⁄ constante qui consiste à contrôler le couple par le glissement fréquentiel et le flux par
le rapport de la tension d'alimentation à la fréquence. Toutefois, ce type de commande ne peut
pas donner des performances dynamiques appréciables à basse vitesse.
En 1972. Blaschke a proposé une nouvelle théorie de commande, dite par flux orienté,
qui permet d'assimiler la machine asynchrone à une machine à courant continu. [13]
Aujourd’hui grâce à cette technique de commande et au développement des systèmes
numériques, de nombreux entraînements à courant continu sont remplacés par des variateurs à
machine asynchrone.
Dans le présent chapitre, nous allons appliquer la commande vectorielle par
orientation du flux rotorique sur la MASDE. Cependant, nous présentons au premier lieu un
rappel sur le principe et les différentes méthodes de la commande vectorielle, nous donnons
ensuite l’application de ces dernières sur la MASDE, et nous irons enfin commenter les
performances apportées par ce type de réglage après l’obtention et l’illustration des résultats
de simulation.
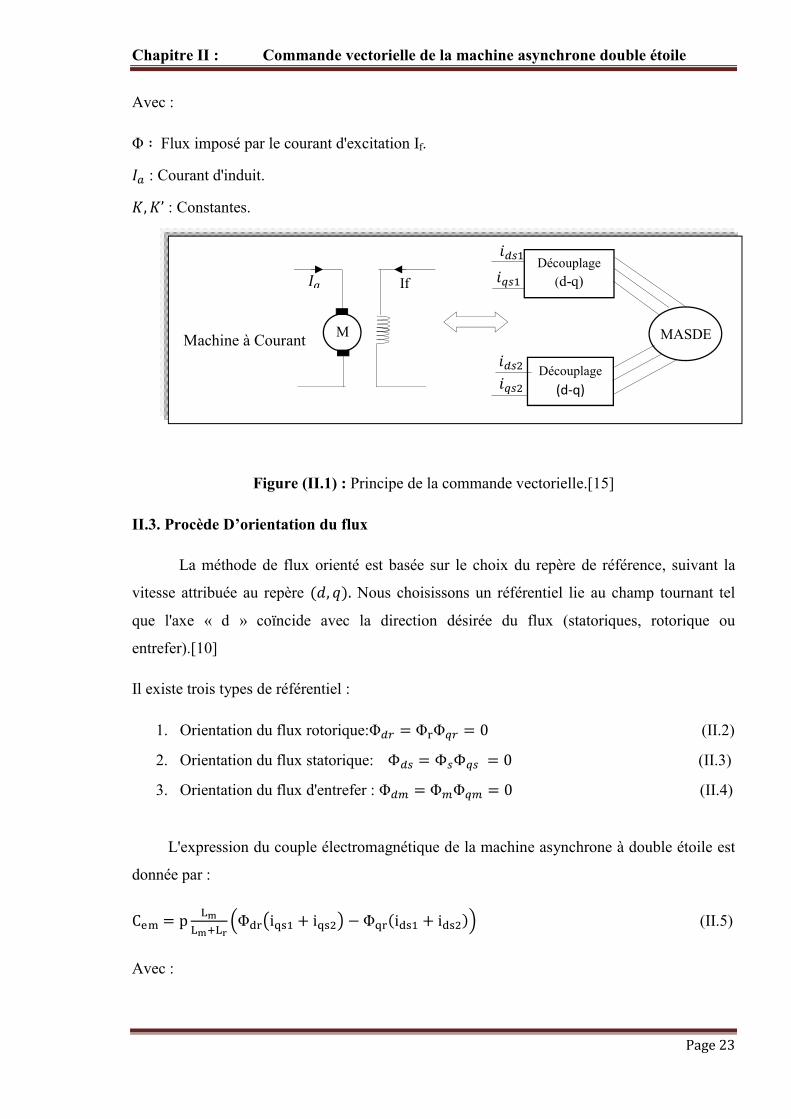
II.2. Principe de la Commande Vectorielle
Le principe de la commande vectorielle (ou commande par flux orienté) consiste à
orienter une des composantes de flux statoriques, rotorique ou de l’entrefer sur un axe du
référentiel tournant à la vitesse .
Le but de cette commande est d’assimiler le comportement de la machine asynchrone
double étoile à celui d’une machine à courant continu à excitation séparée (Fig.II.1).
En effet dans une machine à courant continu le courant d’induit contrôle le couple et
lecourant inducteurcontrôle le flux.
L’expression du couple électromagnétique de la MCC est donné par :
= ΦI = K′I I (II.1)
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 23
Avec :
Φ ∶ Flux imposé par le courant d'excitation If.
: Courant d'induit.
,’ : Constantes.
Figure (II.1) : Principe de la commande vectorielle.[15]
II.3. Procède D’orientation du flux
La méthode de flux orienté est basée sur le choix du repère de référence, suivant la
vitesse attribuée au repère (,). Nous choisissons un référentiel lie au champ tournant tel
que l'axe « d » coïncide avec la direction désirée du flux (statoriques, rotorique ou
entrefer).[10]
Il existe trois types de référentiel :
1. Orientation du flux rotorique:Φ = ΦΦ = 0 (II.2)
2. Orientation du flux statorique: Φ = Φ Φ = 0 (II.3)
3. Orientation du flux d'entrefer : Φ = ΦΦ = 0 (II.4)
L'expression du couple électromagnétique de la machine asynchrone à double étoile est
donnée par :
C = p
Φi + i − Φ(i + i) (II.5)
Avec :
M
If
Machine à Courant
Continu
Découplage
(d-q)
Découplage
(d-q)
MASDE

Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 24
rm
m
LL
L
pk
Pour la MASDE, nous optons pour le choix de l’orientation du flux rotorique (II.2),
car cela permet d’aboutir à un variateur de vitesse ou le flux et le couple électromagnétique
sont indépendamment commandés à travers les courants statoriques. C’est à dire :
Φ = Φ
Φ = 0
Figure (II.2) : Orientation du flux rotorique sur l’axe d.[16]
L’´équation (II.5). Devient :
=
+ =
(II.6)
Avec : =
= +
D'après l'équation (II.6) nous constatons que le couple électromagnétique résulte de
l'interaction d'un terme de flux et d'un terme de courant. Cette expression rappelle le couple
de la machine à courant continu à excitation séparée.
On déduit donc que le fonctionnement de la machine asynchrone à double étoile, avec
sa commande vectorielle est similaire à celui de la machine à courant continu à excitation
séparée.
II.4. Méthodes de la Commande Vectorielle
Pour la réalisation de la commande vectorielle d'une machine asynchrone à double
étoile, il existe deux méthodes : directe et indirecte.
q d
r=dr
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 25
II.4.1. Méthode directe
Cette méthode consiste à déterminer la position et le module du flux quelque soit le
régime de fonctionnement.
Pour cela deux procèdes sont utilisés :
1. la mesure du flux dans l'entrefer de la machine à l'aide de capteur. L'inconvénient
principal de cette technique réside dans le fait que les capteurs du flux sont mécaniquement
très fragiles.
2. l'estimation du flux à l'aide des méthodes mathématiques. Cette méthode est sensible
aux variations des paramètres de la machine. [11][13]
II.4.2. Méthode indirecte
Cette méthode n'utilise pas l'amplitude du flux de rotor mais seulement sa position.
Elle n'exige pas l'utilisation d'un capteur de flux rotorique mais nécessite l'utilisation d'un
capteur ou un estimateur de position (vitesse) du rotor. [14]
L'inconvénient majeur de cette méthode est la sensibilité de l'estimation envers la
variation des paramètres de la machine due à la saturation magnétique et la variation de la
température, surtout la constante de temps rotorique. [12]
II.5.Commande vectorielle indirecte avec régulateur de vitesse
La méthode indirecte consiste à ne pas estimer l'amplitude du flux rotorique mais à
utiliser directement l'amplitude de référenceΦ ∗ . L'intérêt de cette méthode est d'utiliser
uniquement des grandeurs de référence qui par définition ne sont pas bruitées. En effet, à
partir d'un couple électromagnétique de référence ∗ et du flux rotorique de référenceΦ
∗ ,
les courants de références statorique, Cette méthode se caractérise donc par le fait qu'aucune
estimation du flux n'est nécessaire, le contrôle vectoriel est alors simplifié. La méthode repose
en fait en grande partie sur la capacité de l'onduleur et de sa commande à imposer les courants
désirés dans la machine. En effet, à partir de l'instant où le système n'impose pas les courants
désirés, cette commande perd sa principale propriété de découplage entre flux et couple. Cette
méthode consiste à générer à l'aide d'un bloc IFOC (Indirect Field Orientée de Control), les
tensions d'alimentation afin d'obtenir un flux et un couple désirés
Le schéma bloc de cette méthode est donné par la figure suivante :

Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 26
Figure (II.3) : Bloc de commande à flux Orienté.[15]
Considérons comme références de commande le flux rotoriqueΦet le couple . En
tenant compte de la condition, Φ = Φet Φ=0, le système d’équation (I.23) devient :
rm
21m
LL
)i(iL-
dsdsrref (II.7)
rm
21m
LL
)i(iL-
qsqs
(II.8)
En remplaçant(Φ= Φ)dans les équations des tensions rotoriques(I.22), on obtient
= −Φ
= 0 (II.9)
En substituant ( = 0) dans l’équation (II.7), On tire :
Φ = ( + ) (II.10)
A partir de l’équation (II.8), on trouve :
+ = −( + ) (II.11)
En remplaçant (II.7) et (II.8) dans (I.24) on trouve :
⎩⎪⎨
⎪⎧Φ = + + Φ
Φ = + + Φ
Φ = + Φ = +
(II.12)
Avec :
=rm
m
LL
L
; , = , + .
En remplaçant (II.10), (II.11) et (II.12) dans le système d’équation (I.22) on trouve :
Φ
Commande à flux Orienté

Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 27
⎩⎪⎪⎨
⎪⎪⎧= +
− ( + Φ )
= +
− + Φ
= +
+ + Φ
= +
+ + Φ
(II.13)
Avec : =
et = −
On a:
+ =
()
Φ
=
()Φ( + )
(II.14)
Donc: =
Φ ( + )
L’expression du couple montre que le flux de référence et les courants statoriques en
quadrature ne sont pas parfaitement indépendants. Pour cela, il est nécessaire de découpler la
commande du couple et celle du flux de cette machine en introduisant de nouvelles variables :
⎩⎪⎪⎨
⎪⎪⎧ = +
= +
= +
= +
(II.15)
Le système (II.15) montre que les tensions statoriques(,,,) sont
directement reliées aux courants statoriques (,,,). Pour compenser l’erreur
introduite lors du découplage, les tensions statoriques de références,(,,)
àflux constantsontdonnés par:
⎩⎨
⎧= − = − = + = +
(II.16)
Avec :
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 28
⎩⎪⎨
⎪⎧ = + Φ
= ( + Φ )
= + Φ
= + Φ
(II.17)
Pour un découplage parfait, on ajoute les boucles de régulation des courants
statoriques(i,i,i,i) et on obtient à leurs sorties les tensions
statoriques (,,,).
II.5.1.Synthèse des régulateurs PI
Le but d’utilisation des régulateurs est d’assurer une meilleure robustesse vis-à-vis des
perturbations internes ou externes. Les régulateurs utilisés dans notre étude sont des
correcteurs à action proportionnelle-intégrale (PI).
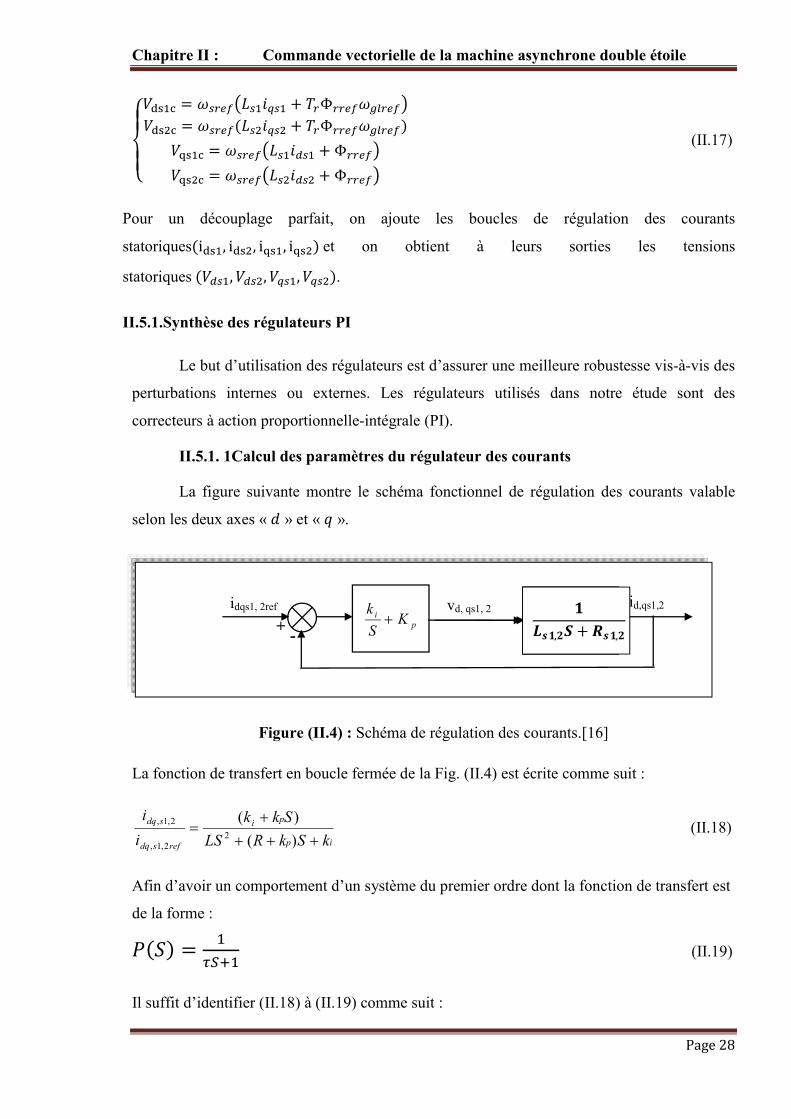
II.5.1. 1Calcul des paramètres du régulateur des courants
La figure suivante montre le schéma fonctionnel de régulation des courants valable
selon les deux axes « » et « ».
Figure (II.4) : Schéma de régulation des courants.[16]
La fonction de transfert en boucle fermée de la Fig. (II.4) est écrite comme suit :
ip
pi
refsdq
sdq
kSkRLS
Skk
i
i
)(
)(2
2,1,
2,1, (II.18)
Afin d’avoir un comportement d’un système du premier ordre dont la fonction de transfert est
de la forme :
()=
(II.19)
Il suffit d’identifier (II.18) à (II.19) comme suit :
id,qs1,2
R+LS
1 p
i KS
k
+ -
idqs1, 2ref vd, qs1, 2
, + ,

Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 29
()
=
(II.20)
Ce qui donne :
+ + + = + + + (II.21)
D’où : =
⁄
= (II.22)
Donc :
= ⁄
= ⁄
= ⁄
= ⁄ (II.23)
On prend =
pour avoir une dynamique du processus rapide, avec =
est
La constante de temps électrique (rotorique)du système.
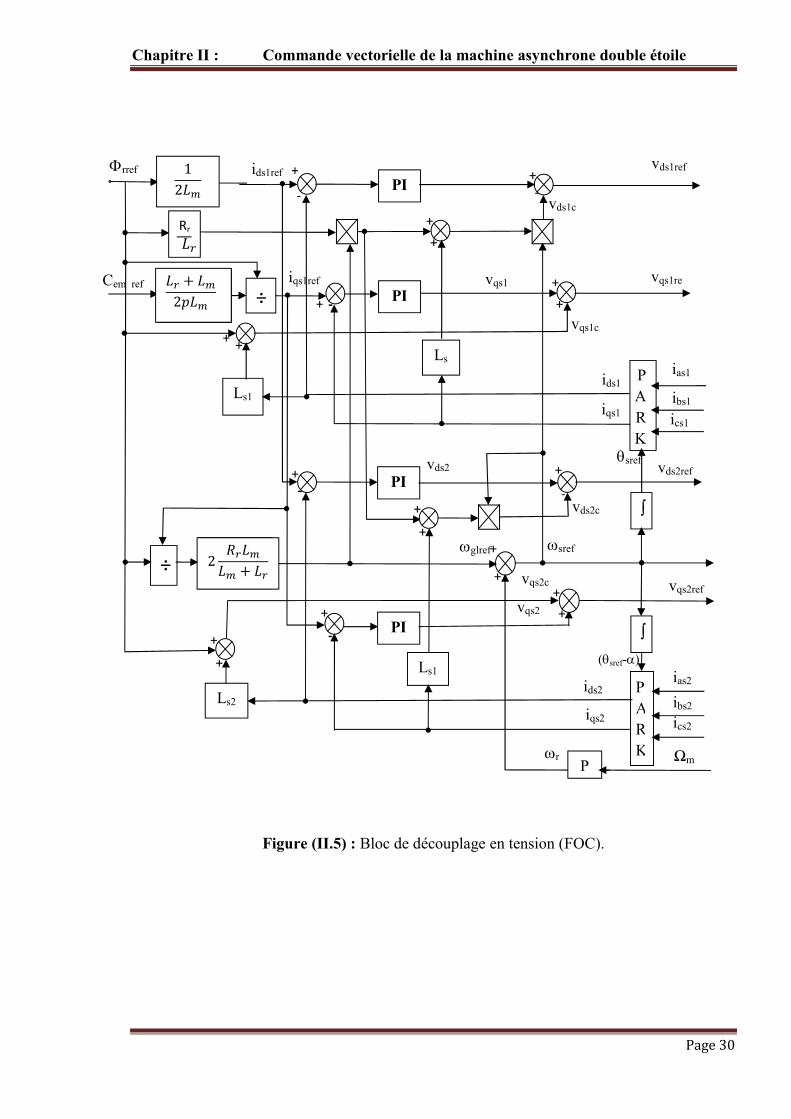
Le schéma bloc de découplage en tension (Field Oriente Control: FOC) est présenté sur la
figure(II.5)
On admet que et
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 30
Figure (II.5) : Bloc de découplage en tension (FOC).
PI
PI
ias1
ibs1
ics1
P
A
R
K
ias2
ibs2
ics2
-
+ vds1ref + -
- +
-
+
÷
glref
+
+
Ls
-
+
- +
Rr
P
A
R
K
(Lr+Lm)
2pLm
1
+
+
PI
PI
Ls1
Ls1
+
+
+ +
+
+
+
+
+
+
Ωm P
÷
ids2
ids1ref rref
Cem ref
vds2
vqs2ref
sref
ids1
iqs1
vqs1 iqs1ref
vds2ref
vqs1re
vqs2
iqs2
vds1c
vqs1c
vds2c
Ls2
vqs2c
r
(sref-)
sref
(Lr+Lm)
2pLm
1
2
+ 2
2 +
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 31
fJS
1
pw
iw
K+S
k
+ -
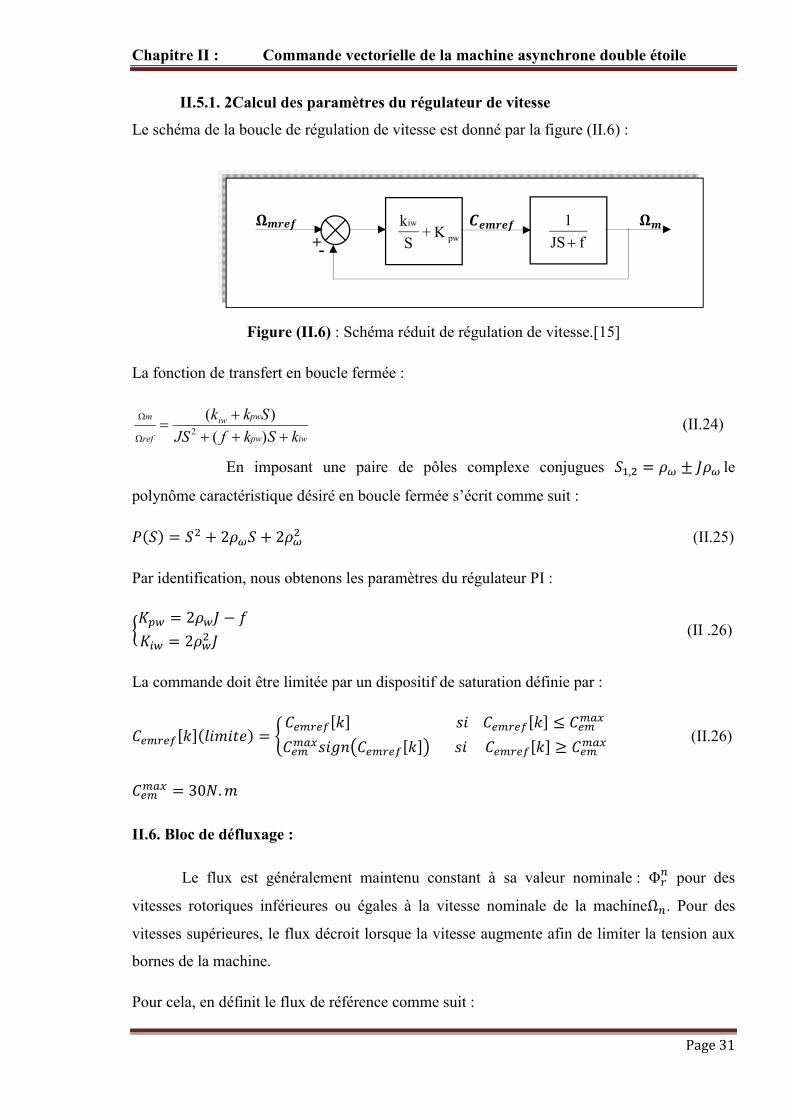
II.5.1. 2Calcul des paramètres du régulateur de vitesse
Le schéma de la boucle de régulation de vitesse est donné par la figure (II.6) :
Figure (II.6) : Schéma réduit de régulation de vitesse.[15]
La fonction de transfert en boucle fermée :
iwpw
pwiw
ref
m
kSkfJS
Skk
)(
)(2
(II.24)
En imposant une paire de pôles complexe conjugues , = ± le
polynôme caractéristique désiré en boucle fermée s’écrit comme suit :
()= + 2 + 2 (II.25)
Par identification, nous obtenons les paramètres du régulateur PI :
= 2 −
= 2
(II .26)
La commande doit être limitée par un dispositif de saturation définie par :
[]()= [] [] ≤
[] [] ≥
(II.26)
= 30.
II.6. Bloc de défluxage :
Le flux est généralement maintenu constant à sa valeur nominale : Φ pour des
vitesses rotoriques inférieures ou égales à la vitesse nominale de la machineΩ. Pour des
vitesses supérieures, le flux décroit lorsque la vitesse augmente afin de limiter la tension aux
bornes de la machine.
Pour cela, en définit le flux de référence comme suit :
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
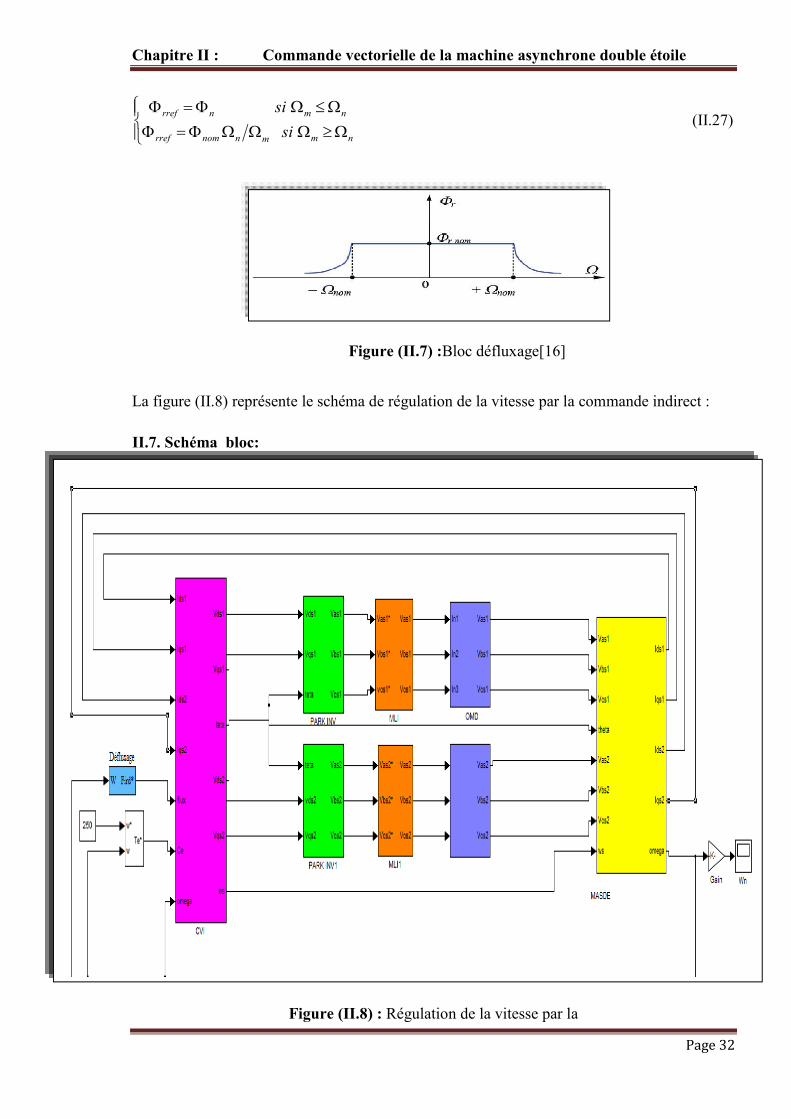
Page 32
nmmnnomrref
nmnrref
si
si
(II.27)
Figure (II.7) :Bloc défluxage[16]
La figure (II.8) représente le schéma de régulation de la vitesse par la commande indirect :
II.7. Schéma bloc:
Figure (II.8) : Régulation de la vitesse par la
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 33
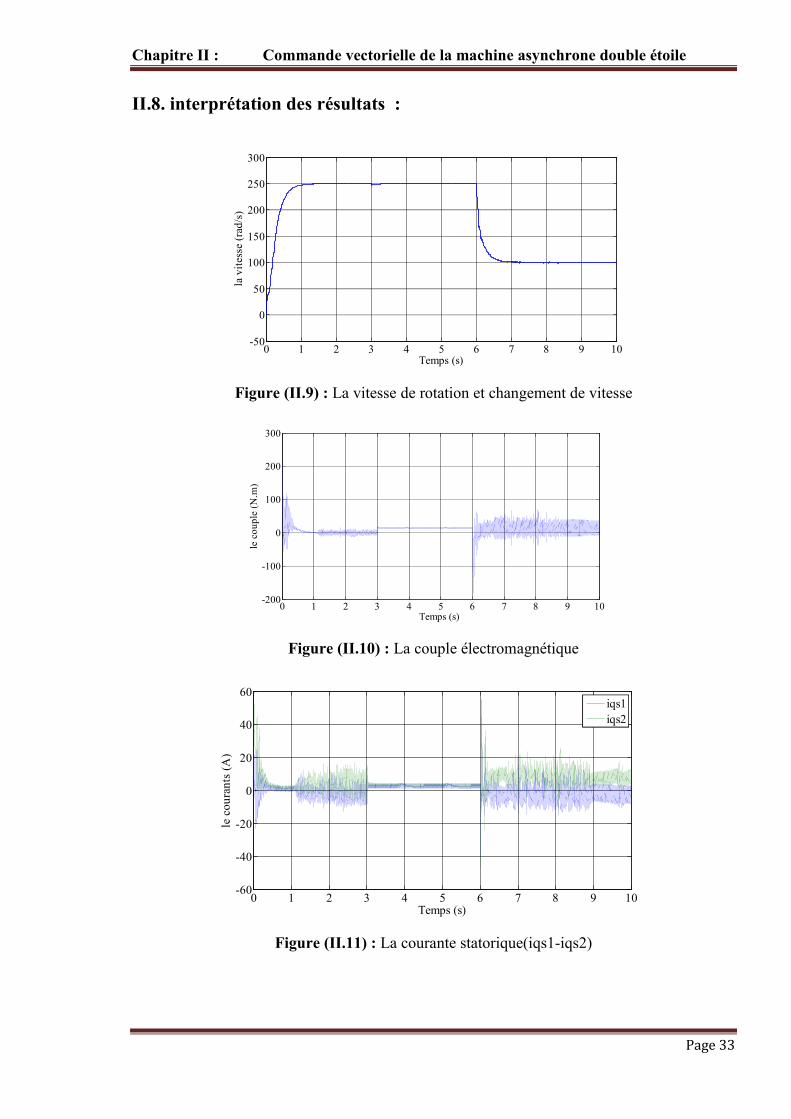
II.8. interprétation des résultats :
Figure (II.9) : La vitesse de rotation et changement de vitesse
Figure (II.10) : La couple électromagnétique
Figure (II.11) : La courante statorique(iqs1-iqs2)
0 1 2 3 4 5 6 7 8 9 10-50
0
50
100
150
200
250
300
Temps (s)
la v
ites
se (
rad
/s)
0 1 2 3 4 5 6 7 8 9 10-200
-100
0
100
200
300
Temps (s)
le c
ou
ple
(N
.m)
0 1 2 3 4 5 6 7 8 9 10-60
-40
-20
0
20
40
60
Temps (s)
le c
ou
ran
ts (
A)
iqs1
iqs2
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 34
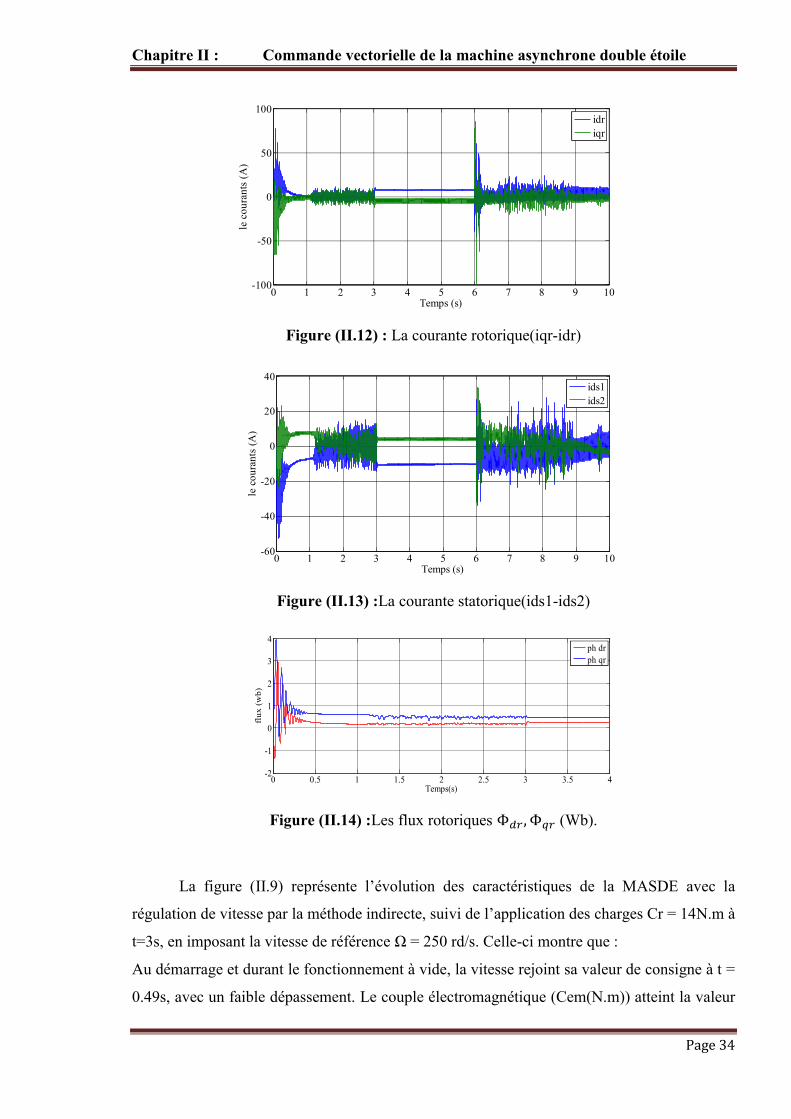
Figure (II.12) : La courante rotorique(iqr-idr)
Figure (II.13) :La courante statorique(ids1-ids2)
Figure (II.14) :Les flux rotoriques Φ ,Φ (Wb).
La figure (II.9) représente l’évolution des caractéristiques de la MASDE avec la
régulation de vitesse par la méthode indirecte, suivi de l’application des charges Cr = 14N.m à
t=3s, en imposant la vitesse de référence Ω = 250 rd/s. Celle-ci montre que :
Au démarrage et durant le fonctionnement à vide, la vitesse rejoint sa valeur de consigne à t =
0.49s, avec un faible dépassement. Le couple électromagnétique (Cem(N.m)) atteint la valeur
0 1 2 3 4 5 6 7 8 9 10-100
-50
0
50
100
Temps (s)
le c
ou
ran
ts (
A)
idr
iqr
0 1 2 3 4 5 6 7 8 9 10-60
-40
-20
0
20
40
Temps (s)
le c
ou
ran
ts (
A)
ids1
ids2
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
3
4
Temps(s)
flu
x (
wb
)
ph dr
ph qr
Chapitre II : Commande vectorielle de la machine asynchrone double étoile
Page 35
maximale de 200 N.m (couple de démarrage), par suite, il se stabilise à la grandeur due au
fonctionnement à vide (proche de 0). Une variation à été observé a t=6s qui due au
changement de consigne de vitesse mécanique 100rd/s.
Le courant statorique observe un courant d’appel d’environ 2 fois le courant nominal, et puis
durant le régime permanent ils évoluent d’une façon sinusoïdale et présente des harmoniques
dus aux deux onduleurs de tension. Le courant en quadrature (ıq1(A)) évolue pendant le
régime établi identiquement au couple électromagnétique. Les flux rotoriques progressent
d’une manière analogue à celle du couple électromagnétique pendant le régime transitoire,
toutefois ils se stabilisent et évoluent selon leurs consignes durant le régime permanent donc
la régulation du vitesse de la MASDE est similaire à celle de la Mcc à excitation séparée.
D’autre part un découplage entre les courant direct et quadrature statoriques qui signifié la
valide de notre commande.
II.9. Conclusion
Dans ce chapitre, nous avons présenté une commande à flux orienté (commande
vectorielle) de moteur asynchrone double stator (étoile).
La méthode d'orientation de flux rotorique qui a été développée c'est la méthode
indirecte.
Cette méthode nous a permis de maintenir parfaitement le découplage entre le couple
et le flux, et rendre la machine asynchrone similaire à une machine à courant continu, rendant
ainsi la commande de vitesse facile.
L’inconvénient de régulation par cette méthode c’est la sensibilité du régulateur PI
aux variations paramétriques de la machine ; Cette dernière qui permette d'avoir proposé une
technique de contrôle robuste (MRAS) aux variations paramétriques du moteur et fera l'objet
du chapitre suivant.
Chapitre III
Commande sans capteur de vitesse par la méthode MRAS
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 38
III.1.Introduction :
La suppression des capteurs de vitesse, est devenue une tâche inévitable dans les commandes à
hautes performances, car non seulement les capteurs augmentent le coût et la complexité des
machines, les mesures sont tachées par les bruits qui influent sur la robustesse des commandes,
surtout en milieux hostiles.
La méthode basé sur le système adaptatif à modèle de référence abrégé MRAS de l'anglais
(Model Reference Adaptive System) a été prouvé que c'est l'une des meilleurs techniques
Proposées par les chercheurs, ceci est dû aux grandes performances qu'elle présente en termes de
fiabilité, stabilité, et moins d'efforts de calculs [17][18].
Ce chapitre est organisé de la manière suivante, au début nous allons présenter les différentes
méthodes de base de la MRAS, ensuite nous développerons l'étude théorique de la méthode
choisie afin de l'appliquer à notre machine, enfin on passera à la simulation et à l'analyse des
résultats obtenus.
III.2.Le système adaptatif à modèle de référence (MRAS) :
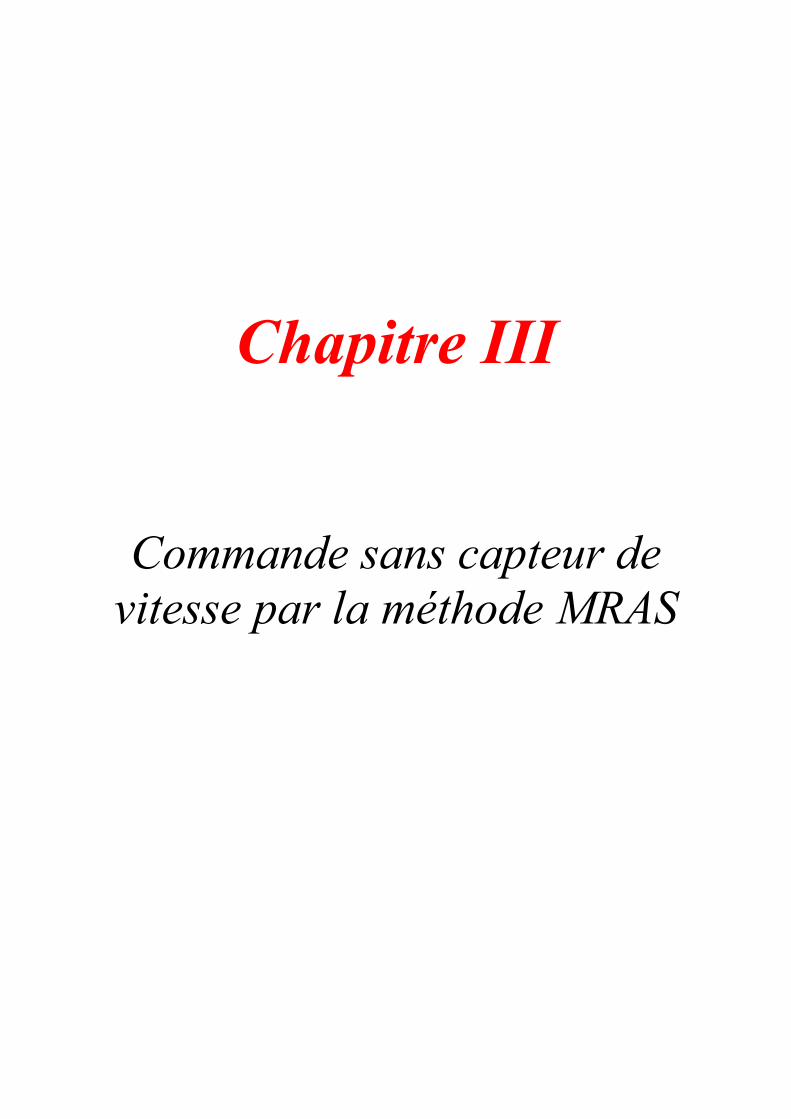
La MRAS a été initialement introduite pour la machine asynchrone par C. Schauder en 1989 [19],
la méthode est composée d'un modèle de référence et un modèle ajustable (adaptatif), avec un
mécanisme d'adaptation. Le modèle de référence est indépendant de l'information de la vitesse
alors que le modèle adaptatif en dépend. Basé sur l'idée de Landau, qui a utilisé le critère de
Popov sur l'hyper stabilité, les deux modèles sont comparés, et l'erreur qui s'en suit est introduite
dans un mécanisme d'adaptation (un régulateur PI) qui génère la vitesse, comme illustrer sur la
figure(III.1) :
Fig.III.1 :Configuration de base de la méthode MRAS.

Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 39
III.2.1.Modèles basés sur le flux rotorique :
Différentes méthodes de la MRAS ont été proposées par les chercheurs, la première, est celle qui
utilise le flux rotorique de la machine, et qui se base sur le modèle en tension choisi comme
référence, et le modèle en courant qui sera le modèle ajustable. Les équations de la machine
asynchrone double étoile sont écrites dans le repère stationnaire.
• Le modèle de tension :
=
− − ( + )
−
+ ( + ) +
(III-1)
=
− − ( + )
−
− ( + ) +
+
Φ (III-2)
= +
•Le modèle de courant (adaptatif) est lui décrit par:
=
( + )−
(III-3)
On voit bien la vitesse Ωqui apparaît explicitement dans (III-3), Le problème rencontré par cette
méthode, est l'intégration en en boucle ouverte, la solution d'utiliser des filtres passe-bas à la
place des intégrateurs purs a été efficace, mais pas en basses vitesses [20].
III.3.La méthode MRAS basée sur la puissance réactive :
III.3.1.Calcul de la puissance réactive :
Les équations des tensions :
Les équations des tensions de la machine asynchrone peuvent être exprimées dans le référentiel
dq par :
= + ∗ +
∗ +
∗ − [( +
) +
+
Φ (III-4)

Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 40
= + ∗ +
∗ +
∗ + [( +
) +
+
Φ (III-5)
Où: l'exposant •
indique la dérivée temporelle.
L'expression de la puissance réactive est donnée par:
Q = Im ∗ = + ( − ) (III-6)
Où : ∗est le conjugué de
En remplaçant: (III-3), et (III-4) dans (III-5) l'expression de la puissance réactive devient alors :
Q1= ∗ −
∗ +
∗ + ∗ −
∗ − ∗ +
[ +
+
+ + + +
( + )](III-7)
On remarque qu'en multipliant (III-4) par isq , et (III-5) par isd , et après soustraction, on arrivera
à la même équation de la puissance réactive exprimer dans (III-7), se qui fait qu'on a une autre
expression de la puissance réactive :
Q2 = - (III-8)
En utilisant l'approximation, que les valeurs réelles des tensions vont se rapprocher de
leursvaleurs de référence en régime permanent [21], l'équation (IV-13) peut s'écrire
Qref = = ∗ -
∗ (III-9)
Et en prenant en considération que dans la commande vectorielle = 0, et qu'en régime
permanent, les termes des dérivées temporelles disparaissent, sachant que, =
, l'équation (III-7) devient alors :
= [ +
+
+ + + +
] (III-10)
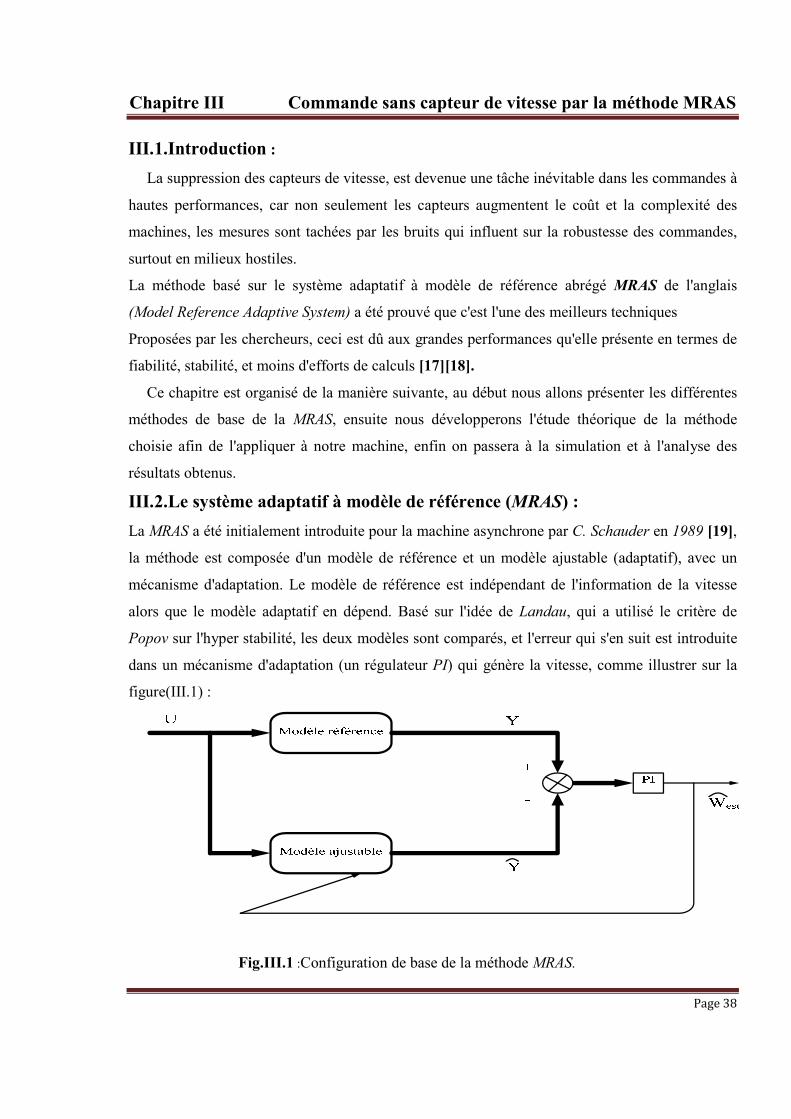
A partir de ces résultats, il est évident que pour le modèle de référence on prendra la puissance
réactive dans (III-9), et vu que (III-10) demande l'information de la vitesse, elle sera prise pour le
modèle ajustable, ceci est montré dans la figure III.2.
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 41
Fig.III.2 : Elaboration de la méthode MRAS à puissance réactive
III.3.2.Mécanisme d'adaptation :
III.3.2.1 Description générale :
Le mécanisme d'adaptation est très important car, il doit assurer la stabilité du système, et que la
valeur estimée converge vers la valeur de référence. Pour la MRAS le mécanisme d'adaptation est
élaboré à partir du concept proposé par Landau, fondé sur l'idée de comparer la sortie du modèle
de référence et celle du modèle ajustable, et de trouver un mécanisme d'adaptation pour
minimiser l'erreur entre les deux modèles en se basant sur leconcept d'hyper stabilité qui concerne
les systèmes à rétroaction qui peuvent être divisés en deux blocs. [20][21][22], (voir figure.III.3).
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 42
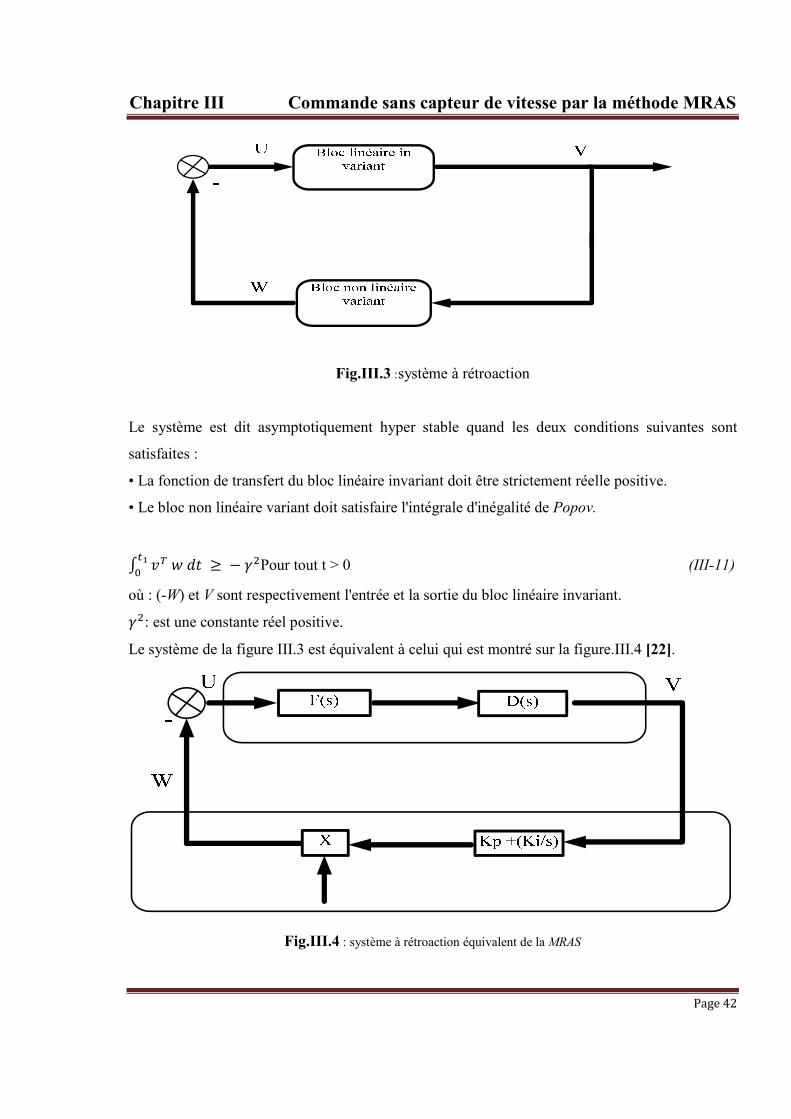
Fig.III.3 :système à rétroaction
Le système est dit asymptotiquement hyper stable quand les deux conditions suivantes sont
satisfaites :
• La fonction de transfert du bloc linéaire invariant doit être strictement réelle positive.
• Le bloc non linéaire variant doit satisfaire l'intégrale d'inégalité de Popov.
∫ ≥ −
Pour tout t ˃ 0 (III-11)
où : (-W) et V sont respectivement l'entrée et la sortie du bloc linéaire invariant.
: est une constante réel positive.
Le système de la figure III.3 est équivalent à celui qui est montré sur la figure.III.4 [22].
Fig.III.4 : système à rétroaction équivalent de la MRAS
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 43
La procédure d'adaptation est alors comme suit : définir D(s) de tel sorte que la fonction de
transfert du bloc linéaire invariant doit être strictement réel positive (première condition), après il
faut choisir Kp, et Ki, de sorte que l'inégalité de Popov soit satisfaite.
III.3.2.2.Application à la commande vectorielle:
Premièrement l'erreur entre le modèle de référence et le modèle ajustable est définit comme suit:
= − (III-12)
Cette erreur sera gouvernée par le mécanisme d'adaptation donné par l'équation
ŵ = ( +
) (III-13)
La vitesse issue de (III-13) est à son tour réinjectée dans le modèle ajustable de telle manière que
l'erreur converge vers zéro.
La démonstration de stabilité de la méthode est portée en annexe E.
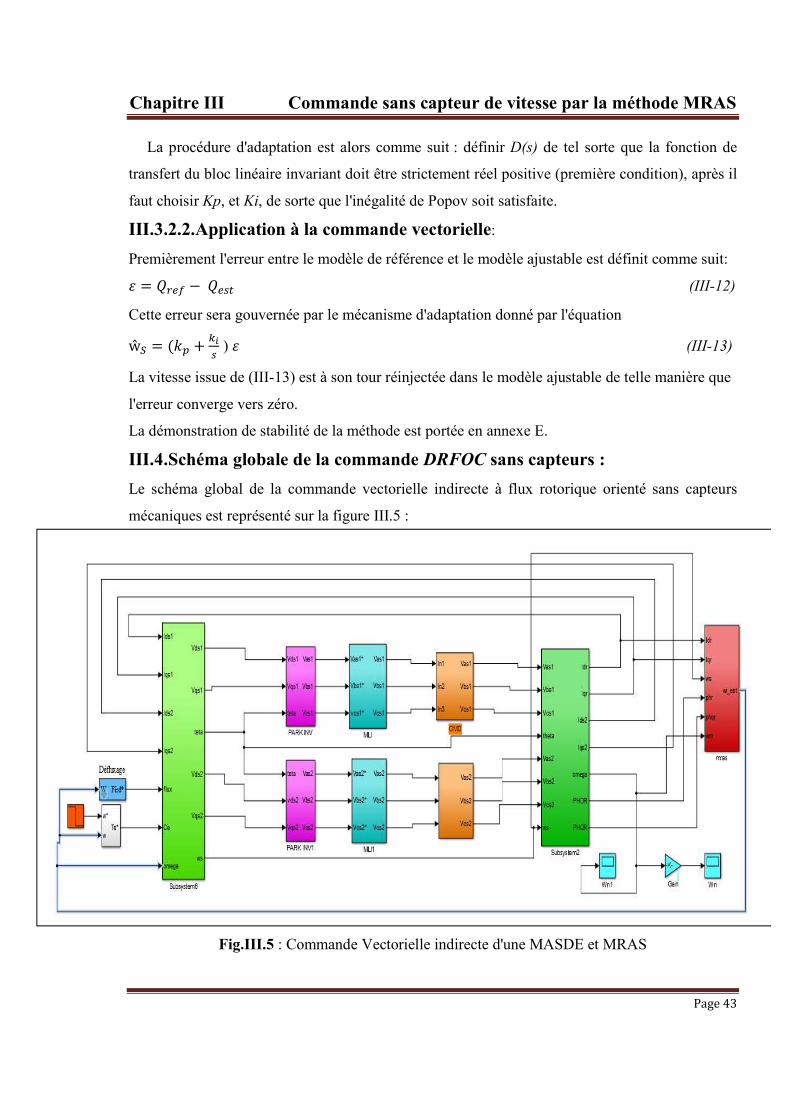
III.4.Schéma globale de la commande DRFOC sans capteurs :
Le schéma global de la commande vectorielle indirecte à flux rotorique orienté sans capteurs
mécaniques est représenté sur la figure III.5 :
Fig.III.5 : Commande Vectorielle indirecte d'une MASDE et MRAS
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 44
III.5.Résultats de simulation :
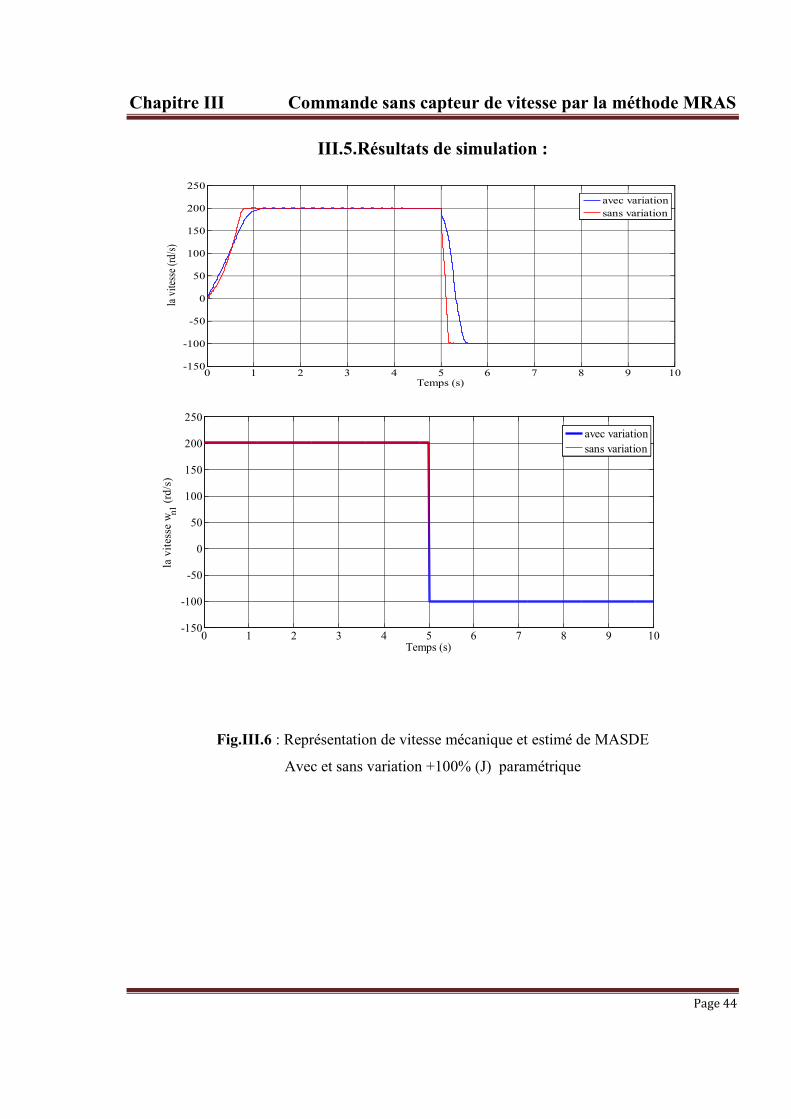
Fig.III.6 : Représentation de vitesse mécanique et estimé de MASDE
Avec et sans variation +100% (J) paramétrique
0 1 2 3 4 5 6 7 8 9 10-150
-100
-50
0
50
100
150
200
250
Temps (s)
la v
itess
e (r
d/s)
avec variation
sans variation
0 1 2 3 4 5 6 7 8 9 10-150
-100
-50
0
50
100
150
200
250
Temps (s)
la v
ites
se w
n1 (
rd/s
)
avec variation
sans variation
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 45
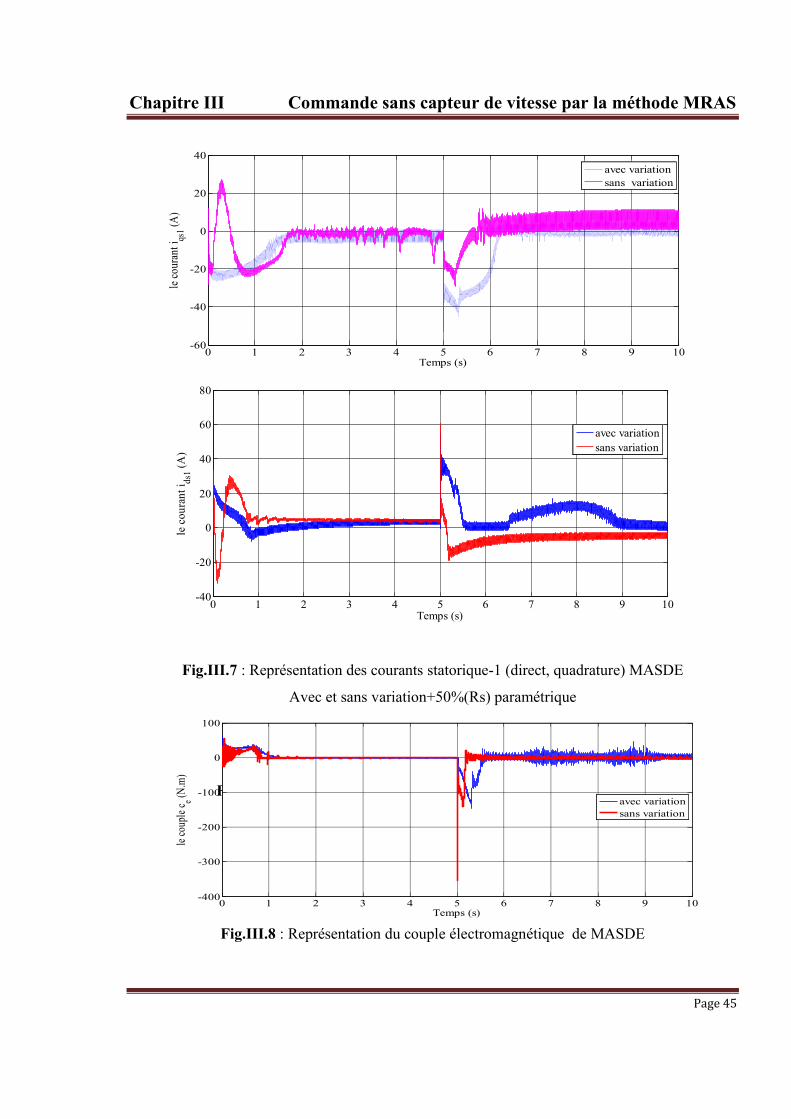
Fig.III.7 : Représentation des courants statorique-1 (direct, quadrature) MASDE
Avec et sans variation+50%(Rs) paramétrique
Fig.III.5 : Représentation de vitesse mécanique et estimé de MASDE
Avec et sans variation paramétrique
Fig.III.8 : Représentation du couple électromagnétique de MASDE
0 1 2 3 4 5 6 7 8 9 10-400
-300
-200
-100
0
100
Temps (s)
le c
oupl
e c e (N
.m)
avec variation
sans variation
0 1 2 3 4 5 6 7 8 9 10-40
-20
0
20
40
60
80
Temps (s)
le c
oura
nt
i ds1 (
A)
avec variation
sans variation
0 1 2 3 4 5 6 7 8 9 10-60
-40
-20
0
20
40
Temps (s)
le c
oura
nt i qs
1 (A
)
avec variation
sans variation
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 46
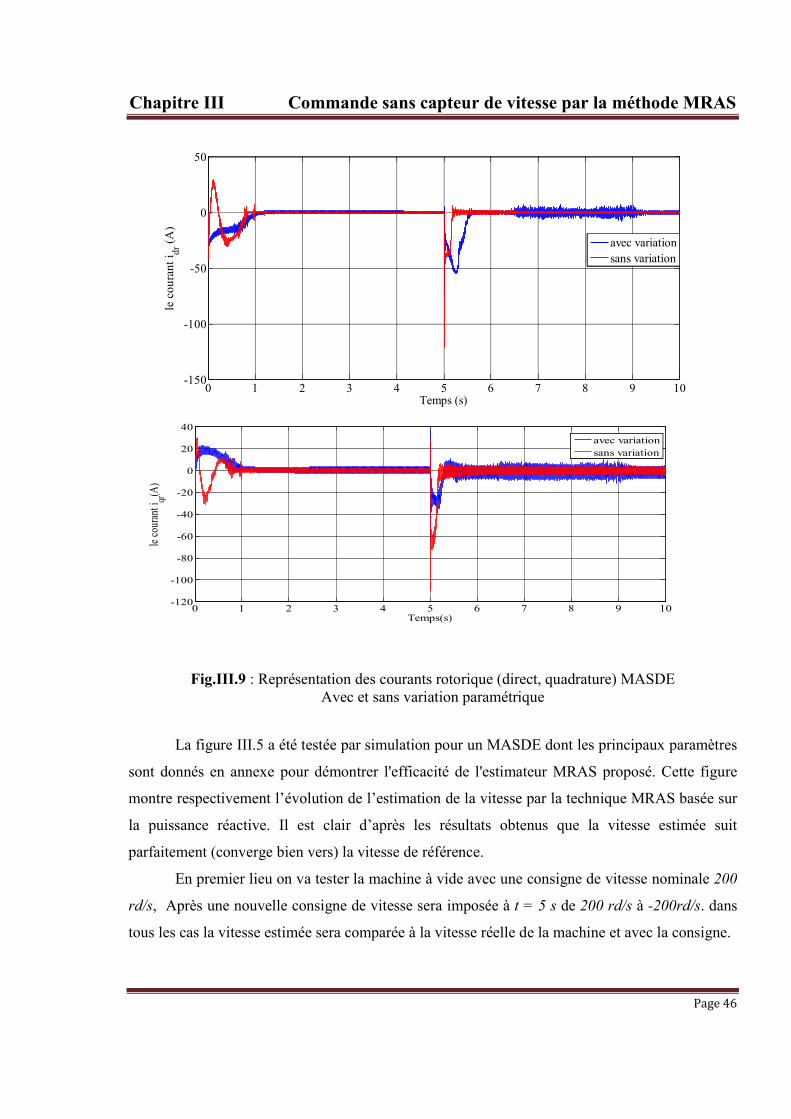
Fig.III.9 : Représentation des courants rotorique (direct, quadrature) MASDE
Avec et sans variation paramétrique
La figure III.5 a été testée par simulation pour un MASDE dont les principaux paramètres
sont donnés en annexe pour démontrer l'efficacité de l'estimateur MRAS proposé. Cette figure
montre respectivement l’évolution de l’estimation de la vitesse par la technique MRAS basée sur
la puissance réactive. Il est clair d’après les résultats obtenus que la vitesse estimée suit
parfaitement (converge bien vers) la vitesse de référence.
En premier lieu on va tester la machine à vide avec une consigne de vitesse nominale 200
rd/s, Après une nouvelle consigne de vitesse sera imposée à t = 5 s de 200 rd/s à -200rd/s. dans
tous les cas la vitesse estimée sera comparée à la vitesse réelle de la machine et avec la consigne.
0 1 2 3 4 5 6 7 8 9 10-150
-100
-50
0
50
Temps (s)
le c
ou
ran
t i d
r (A
)
avec variation
sans variation
0 1 2 3 4 5 6 7 8 9 10-120
-100
-80
-60
-40
-20
0
20
40
Temps(s)
le c
oura
nt i qr
(A)
avec variation
sans variation
Chapitre III Commande sans capteur de vitesse par la méthode MRAS
Page 47
III.5.1 Test de variation paramétrique(robustesse)
Afin de tester la robustesse de la commande vectorielle à base de MRAS, nous avons
simulé les variations de résistance (Rs+50%,Rr+50%), et les inductance (Ls-25%, Lr-25%, Lm-
25%) et moment d’inertie J de 100%.
Les figures (III.7 à 9) exposée les performances et la robustesse de cette commande lors de
ces variations paramétriques.
Nous constatons que lors de la variation les réponses évoluent normalement sans
augmentation importante du temps de réponse et rejoignent la consigne sans perturbation. Ce test
montre que la commande a été assure enbonnes performances vis-à-vis la variation des
paramètres (résistances, inductances et moment d’inertie), ainsi que le principe de découplage et
maintenu.
Ces résultats de simulation montrent la robustesse de la commande lorsque les paramètres
de la machine subissent une variation.
III.6.Conclusion :
Dans ce chapitre, nous avons étudié une méthode d'estimation de la vitesse afin d'éliminer
le capteur. La méthode mise en évidence est la MRAS, connue par sa simplicité et demandant
moins d'efforts de calcul. Après avoir présenté les différentes techniques de la MRAS, on a adopté
celle qui utilise la puissance réactive car elle utilise le moins de paramètres de la machine.
D’après les résultats obtenus, on peut conclure que la commande sans capteur mécanique
proposée est presque insensible vis-à-vis des critères qui ont été testé. Ces résultats ont montré
que la caractéristique de la vitesse estimée par la MRAS est satisfaisante et montre une bonne
réponse dynamique et ne montre influence sur le couple électromagnétique, sur les courants, et
sur le flux rotorique.
Conclusion générale
Conclusion générale
Conclusion générale :
Selon le travail que nous avons effectué on a constaté que La commande d'une MASDE
peut se faire suivant plusieurs techniques chacune d'elles offre des performances dynamiques et
statiques bien définies avec des limites d'applications. Le problème se pose dans le choix de telle
ou telle méthode. Le recours à une méthode ou à l'autre se fait normalement en fonction des
contraintes du cahier de charge, auxquelles s'ajoutent parfois les exigences nouvelles de
l'économie d'énergie et de l'économie du matériel qui devraient être prises en compte.
Au début nous nous sommes intéressés à présenter la commande vectorielle indirecte de la
machine asynchrone double étoile, basée sur le principe de l’orientation du flux rotorique et la
mise en œuvre de son schéma de simulation.
Afin d’améliorer la robustesse d’une telle commande de la MASDE, nous avons fait
appelle à la commande adaptative par modèle de référence et plus particulièrement a la structure
simplifie (MRAS), celle-ci est associée a à la MASDE alimentée en tension
Le choix d’une telle approche (MRAS) est justifié uniquement par raison de simplicité de
la structure de commande.
Enfin les tests effectués par simulation (MATLAB-SIMULINK) ont montré un cas de
robustesse très intéressante de ce type des techniques, notamment vis-à-vis de la variation
importante des paramètres de la machines.
Annexe
Page 50
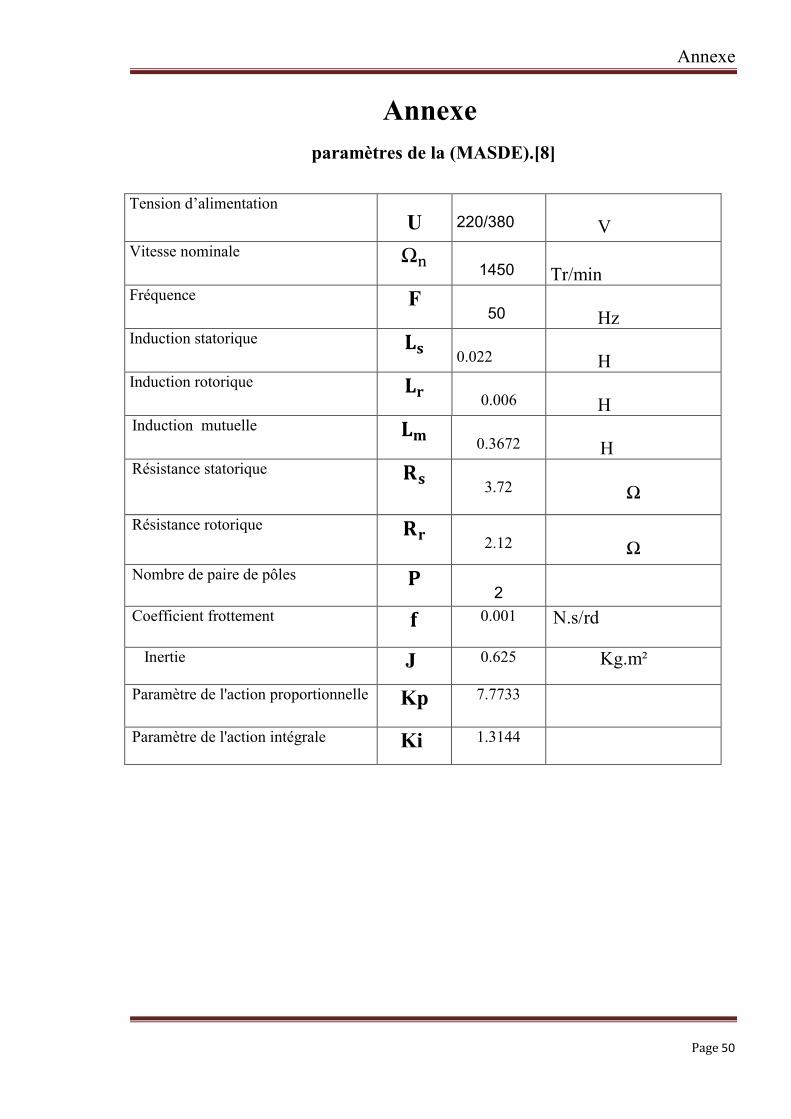
Annexe
paramètres de la (MASDE).[8]
Tension d’alimentation
U
220/380
V
Vitesse nominale Ω
1450
Tr/min
Fréquence F 50
Hz
Induction statorique
0.022
H
Induction rotorique
0.006
H
Induction mutuelle
0.3672
H
Résistance statorique
3.72
Ω
Résistance rotorique
2.12
Ω
Nombre de paire de pôles 2
Coefficient frottement
0.001 N.s/rd
Inertie
J 0.625 Kg.m²
Paramètre de l'action proportionnelle Kp 7.7733
Paramètre de l'action intégrale Ki 1.3144
BIBLIOGRAPHIES
Page 51
[1] M. Bernard, “Historique des machines électromagnétiques et plus particulières des
machines a réluctance variable,” Revue 3E.In˚3. pp. 3–8, Juin 1995.
[2] D. Hadiouche, ’’contribution à l’´étude de la machine asynchrone double étoile
modélisation, alimentation et structure’ ’Thèse de doctorat de l’Université Henri Poincaré,
Nancy-1.,2001.
[3] E. Merabet, ’’Commande Floue Adaptative d’une Machine Asynchrone Double Etoile’’,
Mémoire de Magister, l’Université de Batna 2008.
[4] L.Benalia,commande en tension des moteurs à induction a doublé alimente’’, Thèse
doctorat, l’Université de Batna 2010
[5] H. AMIMEUR, ‘Contribution à la Commande d’une Machine Asynchrone Double Etoiles
par Mode de Glissement’’, mémoire d’ingéniorat, Université de Batna 2008.
[6]KHALED FERKOUS ‘’Etude d’une chaine de conversion d’énergie éolienne’’ Université
Mentouri Constantine, 2009.
[7] Z.Oudjebour, E.M.Berkouk, N.Sami, S. Belgasmi, S. Arezki, I. Messaif, ’’Indirect Space
Vector Control of a double Star Induction Machine fed by two five-levels NPC VSI,”
International Conférence on Electric Machine, ICEM’04, Poland, 2004.
[8]E.Merabet, R.Abdessemed, H.Amimeur,F.Hamoudi,L.Abdelhamid, ’’Influence de la
charge sur une génératrice asynchrone double étoiles(GASDE)’, International Conférence on
Renewable Énergie ICRE’07, Université of Bejaia, pp. 63–68 (CDROM), 2007.
[9] Rachid Abdessamed,’’ Modélisation et simulation des machines électriques’’, Edition
Ellipses, 2011.
[10] V. Pant, G. K. Singh, S. N. Singh, “Modeling of a multi-phase induction machine finder
fault condition,” IEEE 1999 International Conference on Power Electronics and Drive
Systems, PEDS’99, pp. 92–97, Hong Kong, July 1999.
[11] Akkila BOUKHELIFA ,’’Les éléments d’optimisation du pilotage d’une machine
asynchrone en vue d’un contrôle vectoriel”. thèse, Ecole Nationale Polytechnique
.2007
BIBLIOGRAPHIES
Page 52
[12] HAFFAF Adil ;CHEBABHI Moqrane , ’’Commande d’une Machine à Induction
Par la Méthode H∞ ”, Mémoire master. Universitaire Batna. 2007
[13] Saadi Nour el houda ; Bakhti Ibtissam , ’’CONCEPTION D’UN OBSERVATEUR PAR
MODE GLISSANT D’UNE MACHINE A INDUCTION” Mémoire master, Université de
M’sila, 2007.
[14] Gabriel Buche, ’’ Commande vectorielle de machine asynchrone environnement temps
réel matlab /Simulink” mémoire master Université Chellef , 2001.
[15] « le moteur asynchrone ». https://f.adda.free.fr/ipst/index.html
[16] Guy sturtzer, Eddie Smigiel , ‘Modélisation et commande des moteurs triphasés :
Commande vectorielle des moteurs synchrones - Commande numérique par contrôleurs DSP :
Électrotechnique Broché’, 1 juillet 2000, http://www.editions-
ellipses.fr/product_info.php?products_id=739
[17] C. Schauder,“Adaptive speed identification for vector control of induction motors
without rotation al transducers”, Proc. IEEE Industry Applications Society Annual Meeting,
San Diego, California,pp.493- 499, 1989.
[18] Peng F., Fukao T., “Robust Speed Identification for Speed Sensor less Vector Control of
Induction Motors”, IEEE Industry Applications Society Annual Meeting, Vol.1, pp. 419-426.
1993.
[19] suman maiti, chandan chakraborty, sabyasachi sengupta, “Adaptive Estimation of Speed
and Rotor Time Constant for the Vector Controlled Induction Motor Drive Using Reactive
Power”, The 33rd Ann. Conf. IEEE Industrial Electronics Society, Taipei, Taiwan Nov. 2007.
[20] Haron A.R., Idris N.R.N., “Simulation of MRAS-based Speed Sensor less Estimation of
Induction Motor Drives using Matlab/Simulink”, Power and Energy Conference, IEEE
International Vol., pp. 411–415 Nov. 2006.
BIBLIOGRAPHIES
Page 53
[21] M. Rashid, A.F. Stronach, “A stable back-EMF MRAS-based sensor less low-speed
induction motor drive insensitive to stator resistance variation”, IEE Proc- Electr. Power
Appl., Vol. 151, No. 6, Nov. 2004.
[22] Joachim Holtz, “Senseless Control of Induction Motor Drives”, Proceedings of the
IEEE Proc- Electr. Power Appl., Vol. 90, No. 8, Aug 2002.
[23] H.Buhler « Réglage par mode de glissement » Thèse de Magister, Université Henri
Poincaré, Nancy, France, 1995.
[24]D. Hadiouche, ''Contribution à l'étude de la machine asynchrone double étoile,
modélisation, alimentation et structure", Thèse de doctorat, Université Henri Poincaré,
Nancy, France, 2000.
[25]D. Beriber, "Machine asynchrone à double stator alimentée par onduleurs à trois
niveaux à structure NPC", Mémoire de Magister, ENP Alger, 2004.
[26]K. Dahmane, "Contribution à la modélisation et à la commande d’une machine
asynchrone double étoiles alimentée par convertisseur matricielle", Mémoire de Magister,
ENP Alger, 2004.
[27]S. Arezki, "Contribution à l’étude et la commande d’une machine asynchrone à
double étoiles alimentée par onduleurs multiniveaux", Mémoire de Magister, Université
Houari Boumediene, Alger, 2005.
Résumé
Résumé La machine asynchrone double étoiles est utilisée pour sa fiabilité et de segmentation de puissance. Cependant, produire une commande sans capteur de vitesse pour cette machine, présente un intérêt économique, prévoit une diminution de bruit et rend le matériel moins complexe. Dans cette étude, un modèle de la machine asynchrone double étoiles et son alimentation composée de deux onduleurs, ont été présentés. Vu que le modèle de la machine est fortement couplé, nous avons opté pour une commande vectorielle par flux orienté. Après une présentation de l’ensemble des méthodes d'estimation de vitesse mécanique, nous avons appliqué les techniques de l’MRAS. Les résultats de simulation obtenus nous ont permis de constater que la commande vectorielle sans capteur de vitesse d’une MASDE est robuste face aux perturbations de la charge et/ou le changement de la vitesse de référence. Pour la techniques MRAS proposé une sensibles aux variations paramétriques ainsi que une bon robustes à été démontré. Mots clés –Machine asynchrone double étoiles (MASDE), régulateur PI, Commande vectorielle, , Estimateur, MRAS, Observateur.
Abstract The double star induction machine (DSIM) is used for its reliability and supply division. However, to produce a sensor less field-oriented control for this machine, eliminate the sensor cable, provide for better noise immunity and increase reliability. In this study, a model of the double star induction machine and the inverters are developed. Considering the mathematical model of the DSIM is strongly coupled, we chose a vector control by field oriented. After an overview of the state of art in the estimation of velocity of induction machine, we applied two methods to the DSIM, which are, the structure MRAS and the linear reduced observer. The results of simulation obtained enabled us to note that the sensor less field-oriented control of the DSIM is robust face to the disturbances of the load and/or the change of the reference speed. These two techniques are sensitive to the parametric variations at different degrees especially at low speed Key words – Double star induction machine (DSIM), three-level inverters, Vector control, field oriented control, sensor less control, estimators, MRAS, observers.
:ملخص تغذیتھاقمنا في البدایة بإعطاء نموذج . الالمتزامنة ثنائیة الساكن لآللةیھدف ھذا العمل لدراسة تحكم شعاعي بدون ملتقط السرعة
على التحكم المراد دراستھ تطرقنا إلى تفاصیل التحكم الحصول اجل ومن ذلك بعد.مستویات ثالثة ذويجین ممو في المتمثلة مما مكننا من فك ارتباط العزم الكھرومغناطیسي, PIباستعمال الطریقة الغیر مباشرة بتدفق موجة مع منظم لآللة ألشعاعيلتفادي ھذه السلبیة قمنا بتقدیر السرعة باستعمال . یعتبر ھشا ومكلفا الذي سرعةلل میكانیكي ملتقط إلى یحتاجھذا التحكم .والتدفق
النتائج .استعملنا في التقنیة األولى نظاما متأقلما ذا نموذج مرجعي وفي الثانیة استعملنا مالحظا خطیا مختصرا.تقنیتین مختلفتینالالمتزامنة ثنائیة الساكن متینة اتجاه أي تغیر في لآللةبدون ملتقط السرعة ألشعاعيالتحكم أنالمتحصل علیھا مكنتنا من استنتاج
بدرجة متفاوتة وخاصة عند اآللةكلتا التقنیتین المستعملتین حساستان لتغیر خصائص . الحمولة أو تغیر في السرعة المرجعیة . السرعات المنخفضة
السرعةتحكم شعاعي بدون ملتقط شعاعي،تحكم مستویات،ثالثة ذو مموجالساكن، ثنائیة آلة ال متزامنة:ةمفتاحی كلمات
.مرجعي، نظام متأقلم ذو نموذج ،مقدر،مالحظ





























