Embed Size (px)
Citation preview
Coupe de robotique
« Eurobot 2007 »
Mons Polytech Team 2007
Dossier de presse Mons Polytech Team 2007
Sommaire
1. Introduction........................................................................................... 5
2. Déroulement du concours..................................................................... 7
3. En résumé............................................................................................ 8
4. Concours précédents............................................................................ 9
4.1. Eurobot 2001-2002 : Le billard........................................................9
4.2. Eurobot 2002-2003 : Piles ou Faces.............................................11
4.3. Eurobot 2003-2004 : Coconuts Rugby..........................................13
4.4. Eurobot 2004-2005 : Le bowling................................................... 17
4.5. Eurobot 2005-2006 : Le golf......................................................... 20
5. Publicité et image............................................................................... 22
6. Contacts & liens.................................................................................. 23
2
Dossier de presse Mons Polytech Team 2007
La MONS POLYTECH TEAM 2007 est une équipe de 5 étudiants ingénieurs civils mécaniciens en 5ème année. Soudés, dynamiques et ambitieux, nous profitons de notre dernière année pour relever entre amis ce défi que représentent le développement et la réalisation d’un robot autonome destiné à disputer des matches face à d’autres robots tant au niveau national qu’européen.
Ci-dessous, nous présentons les membres de l’équipe MONS POLYTECH TEAM 2007 :
Christophe ChariotCoordinateur
Responsable électronique
Charles – Etienne GonsetteTrésorier – Responsable logistique
Responsable conception mécanique
Maxime MoinetSecrétaire
Responsable stratégie et assistance conception mécanique
3
Dossier de presse Mons Polytech Team 2007
Shita NaïmContacts extérieurs
Responsable fabrication mécanique
Benjamin LecrenierWeb master – Responsable
règlementResponsable programmation
Dans un contexte de dépassement de soi au travers d’une compétition où la technologie de pointe est omniprésente, lors d’un évènement réellement divertissant, devant un public chaleureux, enthousiaste, diversifié et de plus en plus nombreux, face à une presse régionale, nationale et internationale interpellée par cette manifestation hors du commun, la MONS POLYTECH TEAM 2007 représentera votre société de manière efficace.
D'ores et déjà, nous vous remercions de l'attention que vous portez à notre projet et vous souhaitons bon parcours de ce fascicule explicatif.
4

Dossier de presse Mons Polytech Team 2007
1. Introduction
Le concept des concours de robotique n’est pas neuf. Il est né voilà plus de 30 ans aux Etats-Unis. Ces concepts se sont ensuite développés en Europe et particulièrement en France où Planète Sciences organise la coupe de France de Robotique depuis 1994. Suite au succès de celle-ciet à l’intérêt croissant d’équipes d’autres pays, Planète Sciences a lancé voici 6 ans le concours international Eurobot.
Fig.1.1. Logos de planète sciences et d’Eurobot
En France, ces rencontres annuelles de robotique sont désormais un événement attendu avec impatience par un public très large ! Elles regroupent aujourd’hui plus de 1500 étudiants et ingénieurs avec plus de 160 robots, 4000 spectateurs et 4 millions de téléspectateurs grâce à lachaîne de télévision M6.
Fig.1.2. Eurobot 2004 (La Ferté Benard, France)
5
Dossier de presse Mons Polytech Team 2007
Face à un tel succès, la Belgique ne voulait pas être en reste ! C’est ainsi que le Parc d’aventures scientifiques (Pass - Frameries) organise depuis 2001 la Coupe de Belgique de robotique.Cette compétition est « une coupe qualificative » drainant chaque année un public de plus en plus nombreux et qui permet aux concurrents belges se plaçant dans les trois premières positions de participer à la phase finale d’Eurobot.
Dans le but de promouvoir l’intérêt de ses étudiants, d’améliorer leurs connaissances dans ce domaine et de se créer une solide réputation dans la coupe de robotique, la Faculté Polytechnique de Mons et en particulier le service de Génie Mécanique, propose à ses étudiants de dernière année ce projet original, constructif et ludique.
Fig.1.3. Logos de la FPMs
Pour la sixième année consécutive donc, une équipe de 5 étudiants encadrée par du personnel technique et académique relève le challenge suivant : les conception et construction complètes d’un robot autonome répondant au règlement Eurobot de l’année.
Dans les 5 éditions précédentes, les équipes de la F.P.Ms se sont remarquablement illustrées ! En effet, pour une première participation à la Coupe de Belgique 2002, la « F.P.Ms team » a terminé à la seconde place. L’année suivante, les résultats furent encore plus prestigieux, vu que l’équipe a décroché le titre de Champion de Belgique et a terminé à une honorable 11ème place pour sa première participation à la compétition internationale. Il y a trois ans : troisième équipe belge au Pass et une excellente 10 ème place à l’Eurobot. L’année 2004-2005 ne fut pas en reste : cinquième équipe belge au Pass et prix de la créativité. Enfin l’année dernière une belle 3ème à la coupe natinonale avec en prime une nouvelle fois le prix de la créativité, nous a ouvert les portes de l’Italie où nous avons terminé 14 ème.
Nos prédécesseurs nous laissent donc une lourde responsabilité : faire au moins aussi bien qu’eux !!! Tâche ardue certes, mais la « Mons Polytech Team 2007 », constituée de 5 étudiants mécaniciens dynamiques et hyper motivés, est prête à relever ce défi…
6

Dossier de presse Mons Polytech Team 2007
2. Déroulement du concours
Eurobot est un challenge technique, scientifique et ludique. C’est la raison pour laquelle, le règlement de la compétition diffère chaque année. Ceci tant pour donner leur chance aux équipes nouvelles, que pour stimuler celles qui ont déjà participé et renouveler l’intérêt du public face à la compétition.
La coupe de Belgique de robotique se déroulera les 14 et 15 avril 2007 au PASS (Frameries) tandis que la finale de la neuvième édition d’Eurobot est accueillie cette année par la Ville de la Ferté Bernard, en France du 16 au 20 mai 2007.
Voici le moment venu pour vous présenter les grandes lignes du règlement du concours qui nous occupera tout au long de cette année…
Après les thèmes du Billard (2001-2002), de Piles ou Faces (2002-2003), de Coconuts Rugby (2003-2004), de Bowling (2004-2005) et enfin du golf l’année passée (2005-2006), celui du robot 2007 est le Tri Party.
Le but du concours cette année, est en fait de nettoyer la table de jeu. Celle-ci comprendra divers détritus tels que des piles, des bouteilles et des cannettes que le robot aura pour tâche de ramasser et de jeter dans la poubelle adéquate.
Fig.2.1. Représentation de l’aire de jeu du concours 2007
Au cours d'un match, le robot de chaque équipe doit ramasser un maximum de détritus. Les bouteiles et cannettes sont communes aux
7
Dossier de presse Mons Polytech Team 2007
deux équipes tandis que les piles sont étiquettées au couleur de l'équipe (elles sont recouvertes d'un film bleu ou rouge selon l'équipe). Une fois que le robot à ramassé un ou plusieurs détritus, il doit aller le jeter dans la poubelle ad hoc. Chaque équipe dispose de deux poubelles : une pour les cannettes et une pour les bouteilles. Pour ce qui est des piles, elles doivent être placées dans un récipient disposé aléatoirement sur la table.
Cette année encore, les organisateurs ont fait preuve de créativité et proposent un défi aussi intéressant que complexe.
Nous devons dès lors plancher activement sur les développements de systèmes électroniques et mécaniques innovants, performants et fiables.
Tout cela pour répondre à la liste non exhaustive des actions ci-dessous :
• Déplacement du robot• Avalement des piles, des cannettes et des bouteilles• Détection de couleur des piles• Triage des déchets et placement de ceux-ci aux endroits adéquats• Gestion du positionnement aléatoire du récipient à piles• …
3. En résumé
Nous voici donc plongés au beau milieu d’une aventure ambitieuse et passionnante ! En nous engageant dans ce projet, nous avons l’occasion de nous impliquer dans une activité de pointe du point de vue technologique au moyen d’un challenge ludique demandantimagination, créativité et rigueur.
En une dizaine d'années, Eurobot est devenu un événement très populaire en France. De nombreuses entreprises ne se sont d'ailleurs pas trompées en profitant de cet événement pour nouer de premiers contacts avec les participants.
Sans nul doute, la coupe de robotique est un événement qui est amené à se développer de la même manière en Belgique. Dès lors, profitez de l’opportunité que nous vous offrons d’être parmi les premières entreprises belges à promouvoir un tel événement !
8
Dossier de presse Mons Polytech Team 2007
Rejoignez-nous et devenons partenaires afin de faire de ce projet ambitieux, une belle réussite à laquelle nos noms seront associés !
4. Concours précédents
4.1.Eurobot 2001-2002 : Le Billard
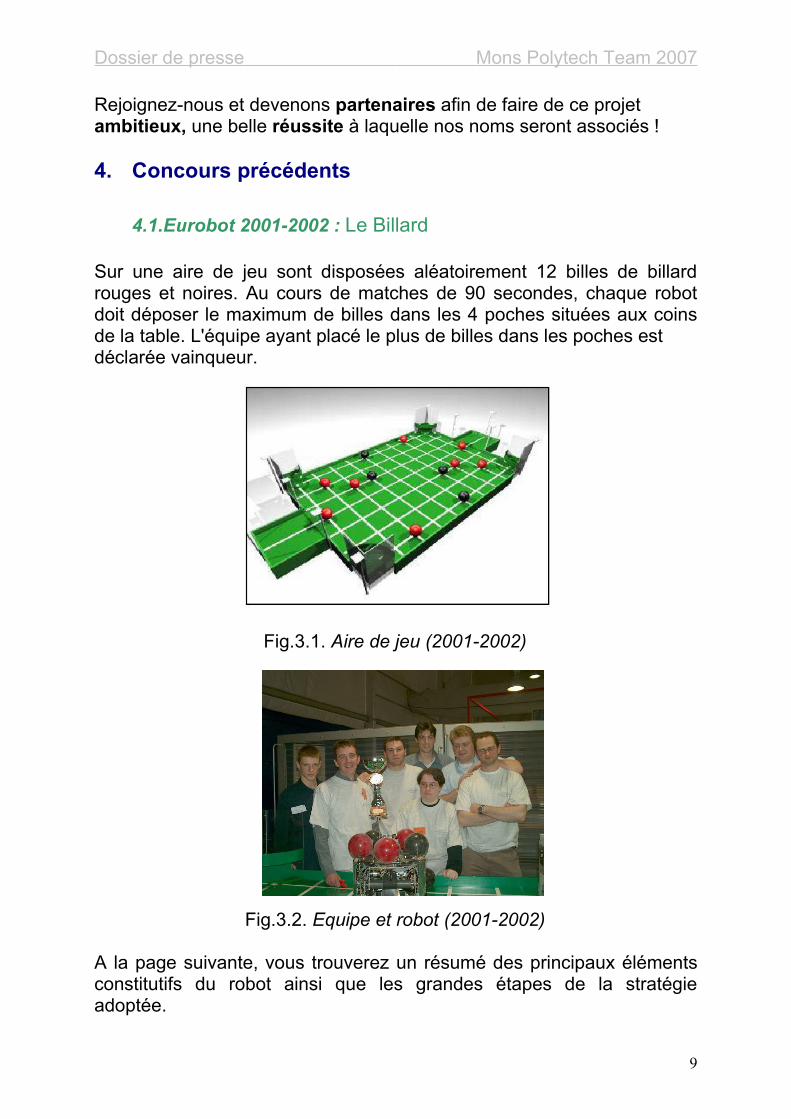
Sur une aire de jeu sont disposées aléatoirement 12 billes de billard rouges et noires. Au cours de matches de 90 secondes, chaque robot doit déposer le maximum de billes dans les 4 poches situées aux coins de la table. L'équipe ayant placé le plus de billes dans les poches estdéclarée vainqueur.
Fig.3.1. Aire de jeu (2001-2002)
Fig.3.2. Equipe et robot (2001-2002)
A la page suivante, vous trouverez un résumé des principaux éléments constitutifs du robot ainsi que les grandes étapes de la stratégie adoptée.
9
Dossier de presse Mons Polytech Team 2007
10
Dossier de presse Mons Polytech Team 2007
4.2.Eurobot 2002-2003 : Piles ou Faces
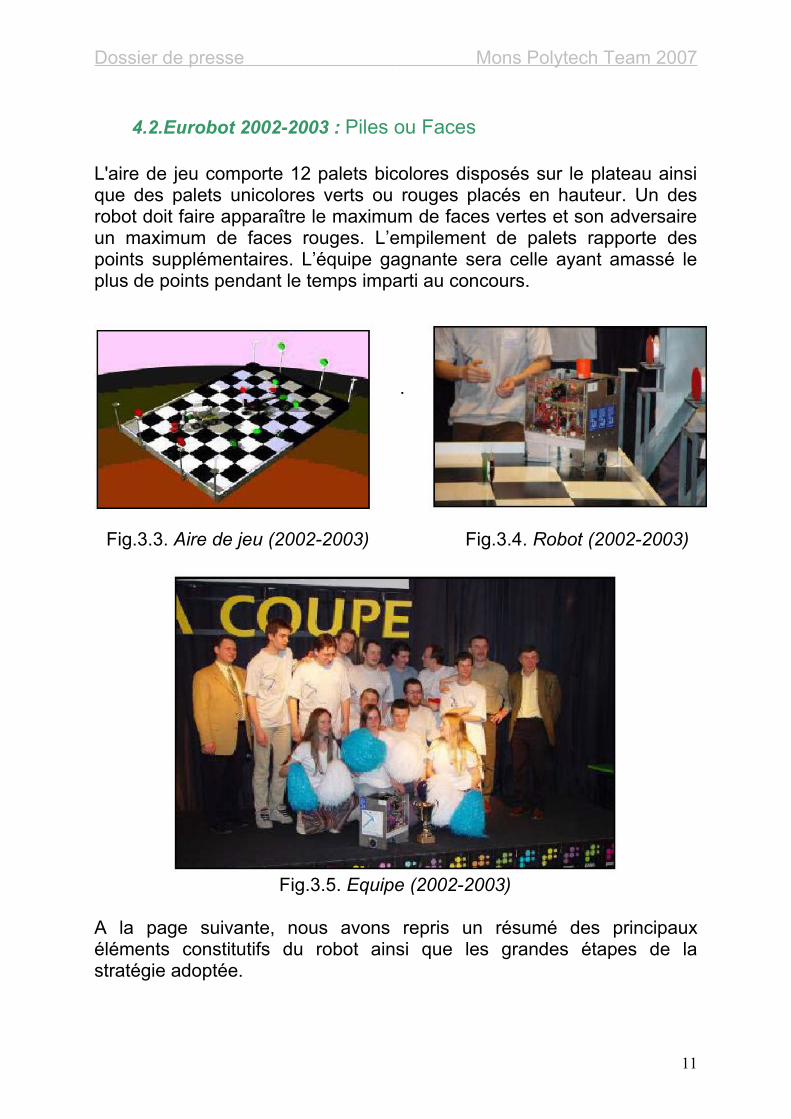
L'aire de jeu comporte 12 palets bicolores disposés sur le plateau ainsi que des palets unicolores verts ou rouges placés en hauteur. Un des robot doit faire apparaître le maximum de faces vertes et son adversaire un maximum de faces rouges. L’empilement de palets rapporte des points supplémentaires. L’équipe gagnante sera celle ayant amassé le plus de points pendant le temps imparti au concours.
.
Fig.3.5. Equipe (2002-2003)
A la page suivante, nous avons repris un résumé des principaux éléments constitutifs du robot ainsi que les grandes étapes de la stratégie adoptée.
11
Fig.3.3. Aire de jeu (2002-2003) Fig.3.4. Robot (2002-2003)
Dossier de presse Mons Polytech Team 2007
12
Dossier de presse Mons Polytech Team 2007
4.3.Eurobot 2003-2004 : Coconuts Rugby
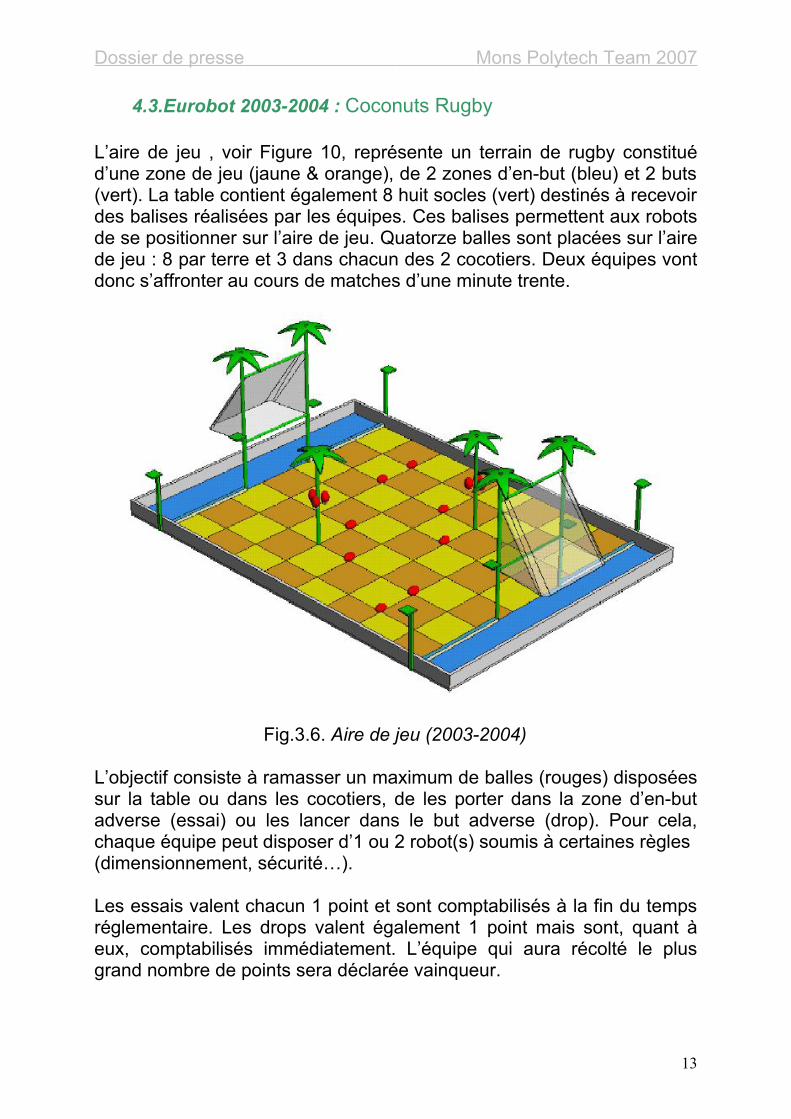
L’aire de jeu , voir Figure 10, représente un terrain de rugby constitué d’une zone de jeu (jaune & orange), de 2 zones d’en-but (bleu) et 2 buts (vert). La table contient également 8 huit socles (vert) destinés à recevoir des balises réalisées par les équipes. Ces balises permettent aux robots de se positionner sur l’aire de jeu. Quatorze balles sont placées sur l’aire de jeu : 8 par terre et 3 dans chacun des 2 cocotiers. Deux équipes vont donc s’affronter au cours de matches d’une minute trente.
Fig.3.6. Aire de jeu (2003-2004)
L’objectif consiste à ramasser un maximum de balles (rouges) disposées sur la table ou dans les cocotiers, de les porter dans la zone d’en-but adverse (essai) ou les lancer dans le but adverse (drop). Pour cela, chaque équipe peut disposer d’1 ou 2 robot(s) soumis à certaines règles(dimensionnement, sécurité…).
Les essais valent chacun 1 point et sont comptabilisés à la fin du temps réglementaire. Les drops valent également 1 point mais sont, quant à eux, comptabilisés immédiatement. L’équipe qui aura récolté le plus grand nombre de points sera déclarée vainqueur.
13

Dossier de presse Mons Polytech Team 2007
Fig.3.7. Robot (2003-2004)
Les principales caractéristiques des éléments constitutifs du robot sont reprises ci dessous.
Vision
Pour mieux se diriger sur les balles au sol, une caméra (CMUcam) détecte le rouge et renvoie une information au robot suivant la position de la balle par rapport au robot.
Détection des palmiers
Afin de localiser la position des palmiers, un sonar a été placé à l’avant du robot. Une fois la position des palmiers enregistrée, le robot peut éviter les collisions avec ceux-ci et aller y
chercher les balles avec la poêle.
14
Dossier de presse Mons Polytech Team 2007
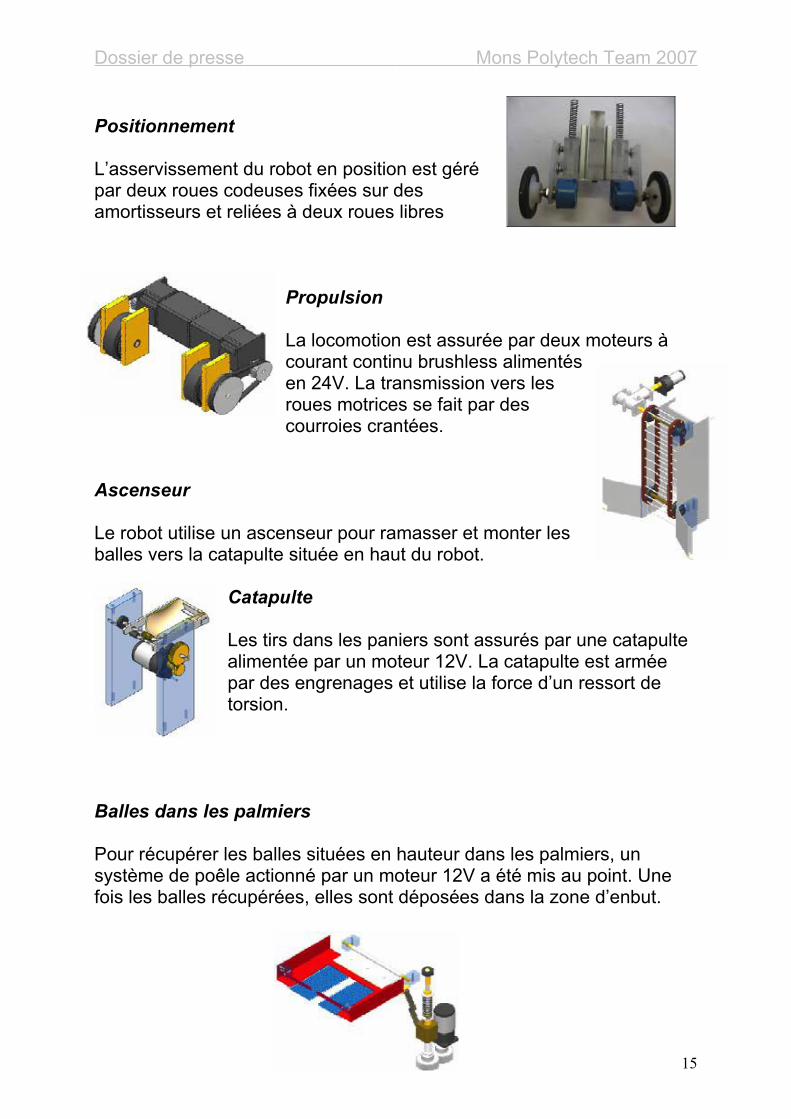
Positionnement
L’asservissement du robot en position est géré par deux roues codeuses fixées sur des amortisseurs et reliées à deux roues libres
Propulsion
La locomotion est assurée par deux moteurs à courant continu brushless alimentés en 24V. La transmission vers les roues motrices se fait par des courroies crantées.
Ascenseur
Le robot utilise un ascenseur pour ramasser et monter les balles vers la catapulte située en haut du robot.
Catapulte
Les tirs dans les paniers sont assurés par une catapulte alimentée par un moteur 12V. La catapulte est armée par des engrenages et utilise la force d’un ressort de torsion.
Balles dans les palmiers
Pour récupérer les balles situées en hauteur dans les palmiers, un système de poêle actionné par un moteur 12V a été mis au point. Une fois les balles récupérées, elles sont déposées dans la zone d’enbut.
15
Dossier de presse Mons Polytech Team 2007
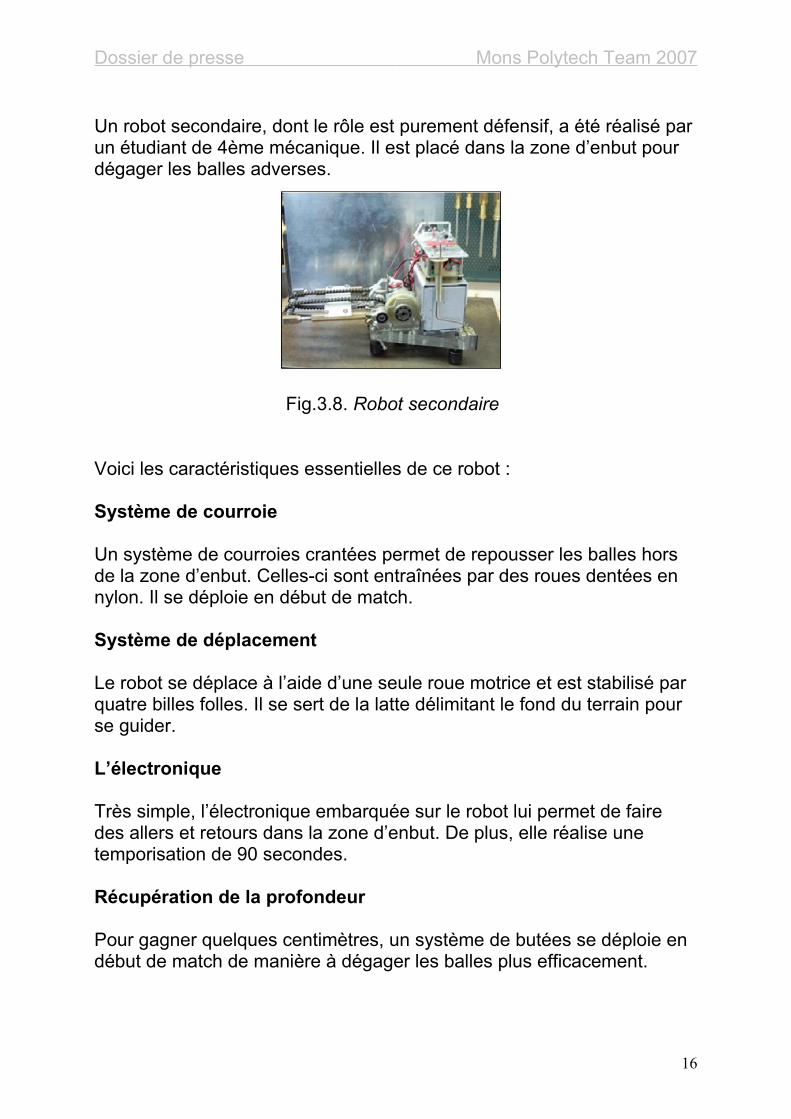
Un robot secondaire, dont le rôle est purement défensif, a été réalisé par un étudiant de 4ème mécanique. Il est placé dans la zone d’enbut pour dégager les balles adverses.
Voici les caractéristiques essentielles de ce robot :
Système de courroie
Un système de courroies crantées permet de repousser les balles hors de la zone d’enbut. Celles-ci sont entraînées par des roues dentées en nylon. Il se déploie en début de match.
Système de déplacement
Le robot se déplace à l’aide d’une seule roue motrice et est stabilisé par quatre billes folles. Il se sert de la latte délimitant le fond du terrain pour se guider.
L’électronique
Très simple, l’électronique embarquée sur le robot lui permet de faire des allers et retours dans la zone d’enbut. De plus, elle réalise une temporisation de 90 secondes.
Récupération de la profondeur
Pour gagner quelques centimètres, un système de butées se déploie en début de match de manière à dégager les balles plus efficacement.
16
Fig.3.8. Robot secondaire
Dossier de presse Mons Polytech Team 2007
4.4.Eurobot 2004-2005 : Le bowling
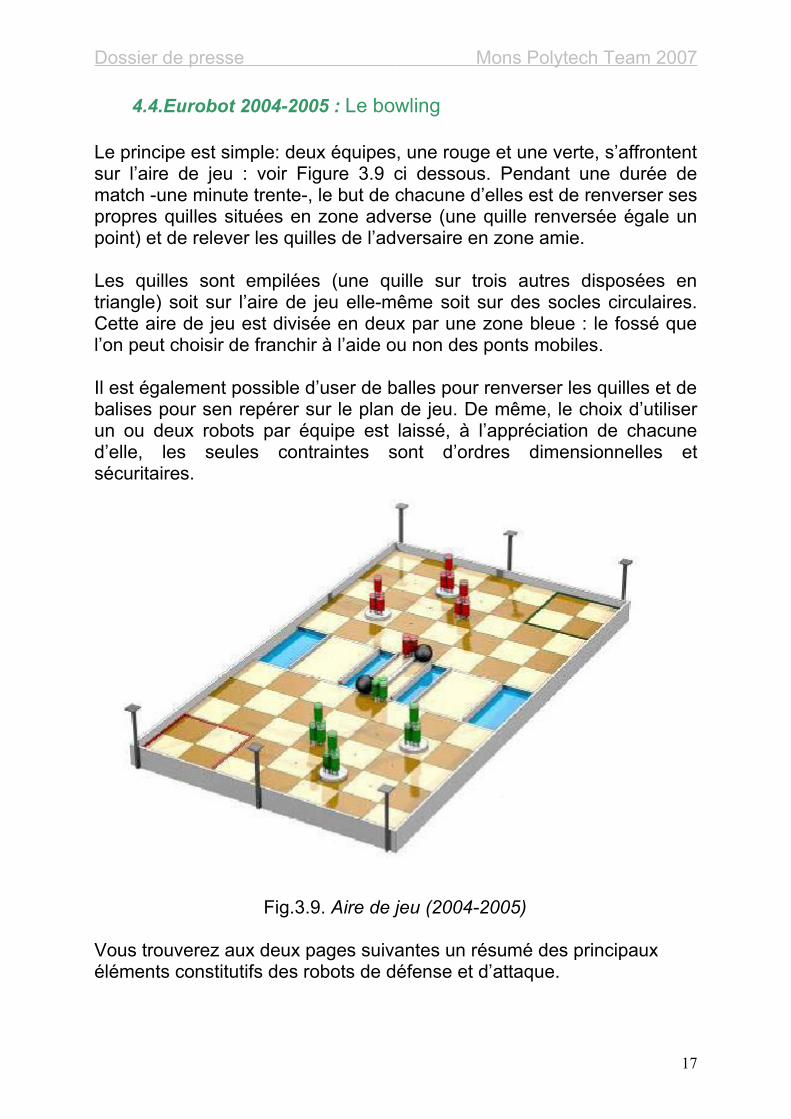
Le principe est simple: deux équipes, une rouge et une verte, s’affrontent sur l’aire de jeu : voir Figure 3.9 ci dessous. Pendant une durée de match -une minute trente-, le but de chacune d’elles est de renverser ses propres quilles situées en zone adverse (une quille renversée égale un point) et de relever les quilles de l’adversaire en zone amie.
Les quilles sont empilées (une quille sur trois autres disposées en triangle) soit sur l’aire de jeu elle-même soit sur des socles circulaires. Cette aire de jeu est divisée en deux par une zone bleue : le fossé que l’on peut choisir de franchir à l’aide ou non des ponts mobiles.
Il est également possible d’user de balles pour renverser les quilles et de balises pour sen repérer sur le plan de jeu. De même, le choix d’utiliser un ou deux robots par équipe est laissé, à l’appréciation de chacune d’elle, les seules contraintes sont d’ordres dimensionnelles et sécuritaires.
Fig.3.9. Aire de jeu (2004-2005)
Vous trouverez aux deux pages suivantes un résumé des principaux éléments constitutifs des robots de défense et d’attaque.
17
Dossier de presse Mons Polytech Team 2007
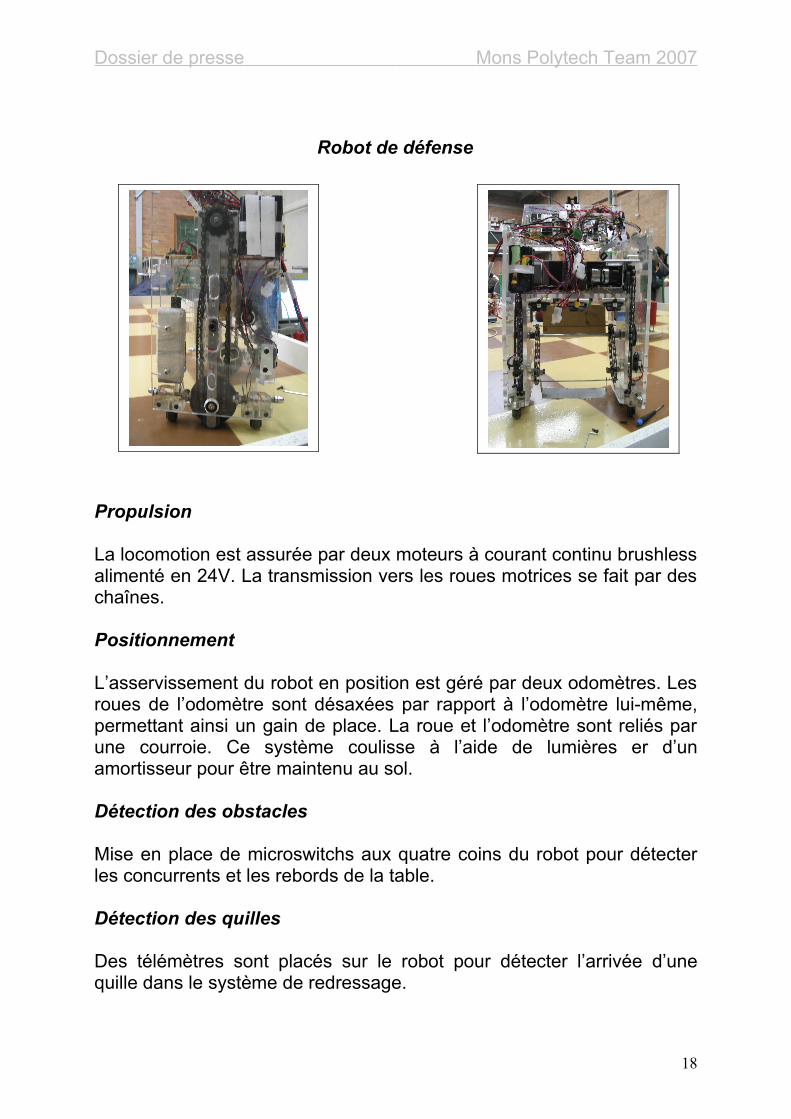
Robot de défense
Propulsion
La locomotion est assurée par deux moteurs à courant continu brushless alimenté en 24V. La transmission vers les roues motrices se fait par des chaînes.
Positionnement
L’asservissement du robot en position est géré par deux odomètres. Les roues de l’odomètre sont désaxées par rapport à l’odomètre lui-même, permettant ainsi un gain de place. La roue et l’odomètre sont reliés par une courroie. Ce système coulisse à l’aide de lumières er d’un amortisseur pour être maintenu au sol.
Détection des obstacles
Mise en place de microswitchs aux quatre coins du robot pour détecter les concurrents et les rebords de la table.
Détection des quilles
Des télémètres sont placés sur le robot pour détecter l’arrivée d’une quille dans le système de redressage.
18
Dossier de presse Mons Polytech Team 2007
Redressage des quilles
Le robot utilise une bande d’aimants attachée à un ascenseur pour ramasser et redresser les quilles. Une fois la quille redressée, une roue libre permet à l’aimant de reprendre sa position d’attente.
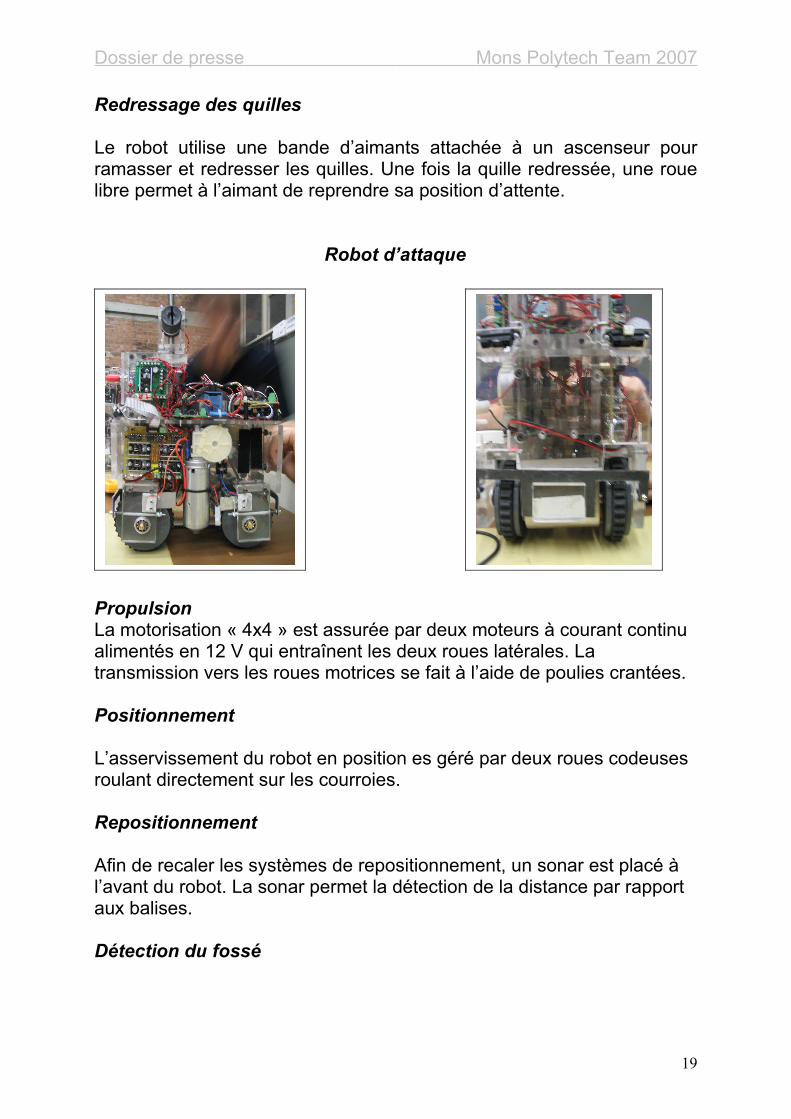
Robot d’attaque
PropulsionLa motorisation « 4x4 » est assurée par deux moteurs à courant continu alimentés en 12 V qui entraînent les deux roues latérales. La transmission vers les roues motrices se fait à l’aide de poulies crantées.
Positionnement
L’asservissement du robot en position es géré par deux roues codeuses roulant directement sur les courroies.
Repositionnement
Afin de recaler les systèmes de repositionnement, un sonar est placé à l’avant du robot. La sonar permet la détection de la distance par rapport aux balises.
Détection du fossé
19
Dossier de presse Mons Polytech Team 2007
Afin de ne pas rouler à cheval sur le pont et dans le fossé, le robot possède deux télémètres.Détection des obstacles
Mise en place de microswitchs aux quatre coins du robot pour détecter les concurrents et les rebords de la table.
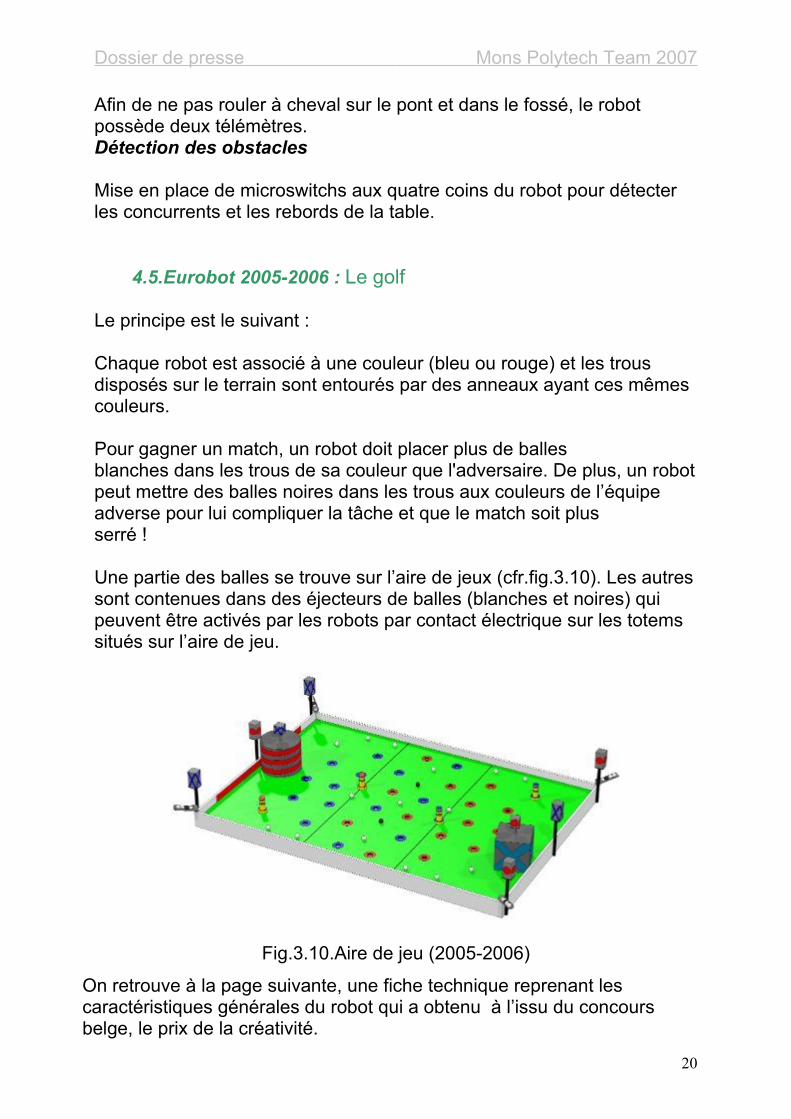
4.5.Eurobot 2005-2006 : Le golf
Le principe est le suivant :
Chaque robot est associé à une couleur (bleu ou rouge) et les trous disposés sur le terrain sont entourés par des anneaux ayant ces mêmes couleurs.
Pour gagner un match, un robot doit placer plus de ballesblanches dans les trous de sa couleur que l'adversaire. De plus, un robot peut mettre des balles noires dans les trous aux couleurs de l’équipe adverse pour lui compliquer la tâche et que le match soit plusserré !
Une partie des balles se trouve sur l’aire de jeux (cfr.fig.3.10). Les autres sont contenues dans des éjecteurs de balles (blanches et noires) qui peuvent être activés par les robots par contact électrique sur les totems situés sur l’aire de jeu.
Fig.3.10.Aire de jeu (2005-2006)
20
On retrouve à la page suivante, une fiche technique reprenant les caractéristiques générales du robot qui a obtenu à l’issu du concours belge, le prix de la créativité.
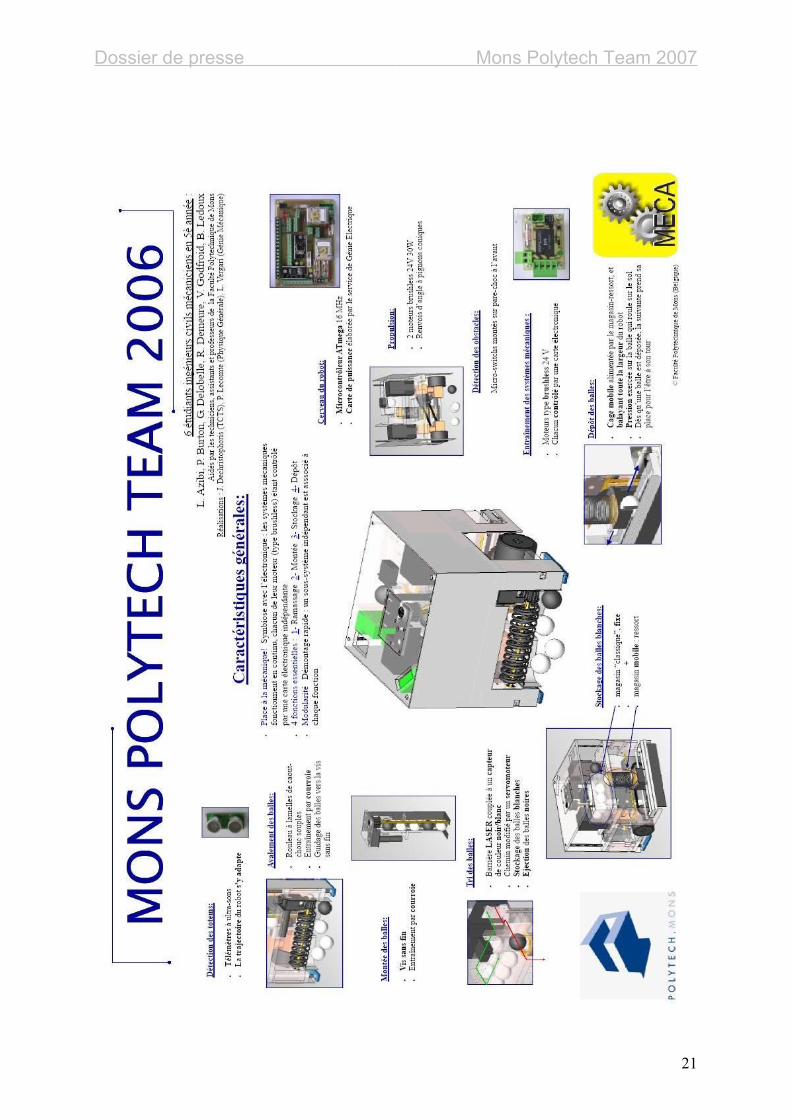
Dossier de presse Mons Polytech Team 2007
21
Dossier de presse Mons Polytech Team 2007
5. Publicité et image
Comme vous pouvez vous en douter, la coupe nationale de robotique et l’Eurobot en règle générale, rassemble autour d’eux un grand nombre de personnes venant de touts horizons (participants, publics, médias,…).
C’est donc une vitrine parfaite pour tout investisseur qui voudrait sponsoriser une équipe participante, en l’occurrence ici la Mons Polytech Team 2007.
En effet, votre sponsoring se marquerait par la pose de votre logo autocollant sur le robot mis en compétition à la fois au Pass et durant les finales internationales en France, si ce dernier se qualifie. Ne voulant présumer de rien, disons juste que nos chances d’y parvenir sont assez conséquentes si l’on se réfère au palmarès des participations antérieures de la Faculté.
Ces deux événements permettent donc à votre entreprise via son logo d’être vu pendant cinq jours de compétition par toute personne présente soit comme participant soit comme spectateur mais aussi par toute personne assis devant son petit écran visionnant la retransmission des compétitions effectué par les télévisions régionales.
Notons également qu’une fois les compétitions terminées, le robot sera mis en vitrine dans les couloirs de la Faculté et en présentation lors des journées d’accueil organisées par celle-ci, augmentant encore le poids de l’image accordée à votre sponsoring.
Votre logo figurera également sur le site d’Eurobot de la Faculté, au dos des tee-shirts que portera l’équipe durant les compétitions ainsi que sur divers posters de présentation de l’activité que nous réaliserons durant l’année.
Si ceci ne vous a pas encore convaincu de la publicité que peut véhiculer le concours Eurobot, nous vous invitons à aller visiter notre site où figurent différents articles paru ces dernières années dans la presse.
22
Dossier de presse Mons Polytech Team 2007
6. Contacts & liens
Pour toute information complémentaire vous pouvez nous contacter par l’intermédiaire de notre délégué aux relations extérieures, soit par :
• Courrier :
• Email : [email protected]
• Téléphone : 0479/371513
Nous vous proposons également quelques liens utiles :
• Site Internet Euobot de La Faculté Polytechnique de Mons
http://www.robot.fpms.ac.be
• Site du concours Eurobot
http://www.eurobot.org
• Site du parc d’aventures scientifiques
http://www.pass.be
23
M. Naïm ShitaCité Houzeau de Lehaie (chambre 1015)Boulevard Dolez 697000 Mons