Upload
sarah-coleman
View
94
Download
10
Embed Size (px)
Citation preview
Cours, Travaux dirigs et Travaux pratiques
AA a iquuuttoommattiquee eett rrgguullaattiioonn
Cours, Travaux dirigs et Travaux pratiques
Maher CHAABENE (Matre assistant GEII) Mohamed DAMMAK (Assistant technologue GEII)
kat
1K
)ap(1e
)!1K(tLP =
Maher CHAABENE (Matre assistant GEII) Mohamed DAMMAK (Assistant technologue GEII)
Institut Suprieur des tudes technologiques de Sfax
x.bdtdxb
dtdxb...
dtdxby.a
dtdya
dtdya...
dtdya 012
2
2m
m
m012
2
2n
n
n ++++=++++
)t(e.K)t(sdt
)t(ds =+p.1
K)p(E)p(S)p(H +==
)t(ue1K)t(s t = ).t(u.texp.)t(.Ka)t(y
+=
( ) ( )
=
+=+++=
wK)H(jw)(Imw1K)H(jw)(Re
.w1jK
.w1KH(j.w)
+1
1pww 02
z.2pK
wp.w.z.2pw.K
)p(E)p(S)p(H
0
222
20 =++== 00 ++
( )2 .t.z1wsin.e.z1
11K)t(s 0tzw
20
+
= Pour le technicien suprieur
Cours, Travaux dirigs et Travaux pratiques
10-3 10-2 10-1 100 101-100
-80
-60
-40
-20
0
20
Pulsation W
G dB
-3 dB
f1 10.f1
-40 dB/d c
wo
20.logK
e
z=2 1 z=z=0.7
z=0.5
z=0.1
10-3 10-2 10-1 100 101-200
-150
-100
-50
0Pulsation W Dephasage
-90
-180
wo
z=2
z=1 z=0.7 z=0.5
z=0.1
0 100 200 300 400 500 60000.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Step R sponse
Time (sec)
Ampl
itude
e
z=0.1
z=0.3
z=0.5 z=0. 7
z=1
z=2
AAuuttoommaattiiqquuee et rgu ationet rgulation l
Plan du cours
Nomenclature Chapitre 1 : Notion de systmes lineaires asservis 1. Notion de systmes................................................................................................................. 2
1.1. Dfinition........................................................................................................................... 2 1.2. Classification des systmes.............................................................................................. 2
1.2.1. Les systmes linaires .............................................................................................. 2 1.2.2. Les systmes invariants ............................................................................................ 3 1.2.3. Les systmes modle dterministe ........................................................................ 3 1.2.4. Les systmes asservis .............................................................................................. 3
1.3. Performances des systmes asservis .............................................................................. 5 1.3.1. Notion de stabilit...................................................................................................... 5 1.3.2. Notion de rapidit ...................................................................................................... 5 1.3.3. Notion de prcision ................................................................................................... 6
2. Notion de signal....................................................................................................................... 6 2.1. Dfinition........................................................................................................................... 6 2.2. Signaux canoniques ......................................................................................................... 6
3. Rponses particulires dun systme scalaire ..................................................................... 7 3.1. Rponse impulsionnelle.................................................................................................... 7 3.2. Rponse indicielle............................................................................................................. 7
4. Rponse un signal quelconque........................................................................................... 7 Chapitre 2 : Les systmes linaires continus 1. Prsentation........................................................................................................................... 10
1.1. Dfinition......................................................................................................................... 10 1.2. Principe de proportionnalit ............................................................................................ 10 1.3. Principe d'additivit ou de superposition......................................................................... 11
2. Mise en quation dun systme linaire .............................................................................. 11 3. Transforme de Laplace ....................................................................................................... 12
3.1. Formulation mathmatique ............................................................................................. 13 3.2. Proprits et thormes ................................................................................................. 13 3.3. Table des transformes de Laplace................................................................................ 14 3.4. Exemple.......................................................................................................................... 17
4. Srie de TD N1...................................................................................................................... 19
Cours dautomatique et rgulation - I -
Chapitre 3 : Reprsentation graphique des systmes linaires continus 1. Fonction de transfert............................................................................................................. 21 2. Diagramme fonctionnel......................................................................................................... 22
2.1. Dfinition......................................................................................................................... 22 2.2. Exemple de schma bloc dun systme en boucle ferme ............................................. 22 2.3. Rgles de simplification .................................................................................................. 22
2.3.1. Mise en srie........................................................................................................... 22 2.3.2. Mise en parallle ..................................................................................................... 23 2.3.3. Structure en boucle ferme ..................................................................................... 23 2.3.4. Dplacement des nuds dinformations ................................................................. 24 2.3.5. Permutation de deux nuds successifs.................................................................. 24 2.3.6. Dplacement de sommateurs ................................................................................. 24 2.3.7. Permutation de deux sommateurs successifs ......................................................... 25
2.4. Principales transmittances lectriques et mcaniques ................................................... 25 2.5. Applications .................................................................................................................... 26
2.5.1. Systme lectronique.............................................................................................. 26 2.5.2. Moteur courant continu......................................................................................... 28
3. Lieux de transfert................................................................................................................... 29 3.1. Introduction..................................................................................................................... 29 3.2. Interprtation dans le plan complexe .............................................................................. 29 3.3. Les lieux de transfert ...................................................................................................... 30
3.3.1. Lieu de Bode ........................................................................................................... 30 3.3.2. Lieu de Nyquist ....................................................................................................... 30 3.3.3. Lieu de Black........................................................................................................... 31 3.3.4. Abaque de Black ..................................................................................................... 31
4. Srie de TD N2...................................................................................................................... 32 Chapitre 4 : Etudes des systmes lmentaires 1. Etude d'un systme de premier ordre.................................................................................. 35
1.1. Etude temporelle............................................................................................................. 35 1.1.1. Dfinition ................................................................................................................. 35 1.1.2. Rponse impulsionnelle .......................................................................................... 35 1.1.3. Rponse indicielle ................................................................................................... 36 1.1.4. Application............................................................................................................... 36 1.1.5. Relation tempsfrquence ...................................................................................... 37
1.2. Etude harmonique .......................................................................................................... 37 1.2.1. Reprsentation de Bode.......................................................................................... 38 1.2.2. Reprsentation deNyquist ....................................................................................... 39 1.2.3. Reprsentation de Black ......................................................................................... 40
2. Etude d'un systme de second ordre .................................................................................. 41 2.1. Dfinition......................................................................................................................... 41 2.2. Etude temporelle............................................................................................................. 42
2.2.1. Rponse impulsionnelle .......................................................................................... 42 2.2.2. Rponse indicielle ................................................................................................... 43
Cours dautomatique et rgulation - II -
2.3. Etude harmonique .......................................................................................................... 47
2.3.1. Diagrammes de Bode.............................................................................................. 47 2.3.2. Reprsentation dans le plan de Nyquist.................................................................. 50 2.3.3. Reprsentation dans le plan de Black ..................................................................... 50 2.3.4. Exemple .................................................................................................................. 51
3. Srie de TD N2...................................................................................................................... 52 Chapitre 5 : Performances des systmes linaires asservis 1. Introduction............................................................................................................................ 58 2. Stabilit................................................................................................................................... 58
2.1. Dfinition......................................................................................................................... 58 2.2. Condition de stabilit ...................................................................................................... 58
2.2.1. Critre de Routh ...................................................................................................... 59 2.2.2. Applications ............................................................................................................. 59
2.3. Critre de Nyquist ........................................................................................................... 60 2.3.1. Critre de Nyquist simplifi...................................................................................... 60 2.3.2. Marge de gain ......................................................................................................... 61 2.3.3. Marge de phase ...................................................................................................... 61
2.4. Critre de Black .............................................................................................................. 62 2.4.1. Critre de Black....................................................................................................... 62 2.4.2. Abaque de BlackNichols....................................................................................... 63
2.5. Critre de Bode............................................................................................................. 64 2.5.1. Critre de Rivers ..................................................................................................... 64 2.5.2. Critre de Bode ....................................................................................................... 64
3. Prcision ................................................................................................................................ 64 3.1. Dfinition......................................................................................................................... 64 3.2. Classe dun systme....................................................................................................... 65
4. Rapidit .................................................................................................................................. 66 4.1. Rappel et dfinition ......................................................................................................... 66 4.2. Critre de Naslin ............................................................................................................. 66
5. Srie de TD N3...................................................................................................................... 68 6. Srie de TD N4...................................................................................................................... 69 Chapitre 6 : Les rgulateurs 1. Gnralits ............................................................................................................................. 72
1.1. Tches du rgulateur...................................................................................................... 72 1.2. Inventaire........................................................................................................................ 72
2. Rles des rgulateurs ou correcteurs ................................................................................. 73 3. Rglage proportionnel .......................................................................................................... 73
3.1. Principe........................................................................................................................... 73 3.2. Statisme.......................................................................................................................... 73 3.3. Correcteur action Proportionnelle ................................................................................ 74 3.4. Correcteur action Drive............................................................................................. 74 3.5. Correcteur action Intgrale........................................................................................... 75
Cours dautomatique et rgulation - III -
4. Types de correcteurs ............................................................................................................ 75
4.1. Correcteur action Proportionnelle Drive................................................................... 75 4.2. Correcteur action Proportionnelle Intgrale ................................................................. 75 4.3. Correcteur action Proportionnelle Intgrale Drive .................................................... 76
5. Srie de TD N5...................................................................................................................... 77 Problmes 1. Problme n1 ......................................................................................................................... 80 2. Problme n2 ......................................................................................................................... 80 3. Problme n3 ......................................................................................................................... 81 4. Problme n4 ......................................................................................................................... 81 5. Problme n5 ......................................................................................................................... 82 6. Problme n6 ......................................................................................................................... 82 7. Problme n7 ......................................................................................................................... 84 Travaux Pratiques TP d'initiation : Equipement du laboratoire............................................................................. 87 TP1 : tude dun systme de premier ordre............................................................................ 94 TP2 : tude dun systme de second ordre .......................................................................... 101 TP3 : Simulation dun systme de premier et de second ordre........................................... 109 TP4 : Simulation de la rgulation de vitesse dun moteur .................................................. 114 Annexe Bibliographie
Cours dautomatique et rgulation - IV -
Nomenclature
Arg Argument. C Capacit. Classe d'un systme. z Coefficient damortissement d'un systme de second ordre. Constante du temps ou temps de rponse d'un systme de premier ordre. Dk Dpassement relatif dordre k. Dphasage en degrs. ( )tu chelon de position unitaire. e(t) Entre d'un systme. Erreur ou cart. f.e.m Force lectromotrice.
cf Frquence de coupure d'un systme de premier ordre. Gdb Gain en dcibels. d Gain statique du rgulateur Drive. i Gain statique du rgulateur Intgral. KP Gain statique du rgulateur Proportionnel. K Gain statique d'un systme de premier ordre ou de second ordre.
)(t Impulsion de Dirac. L Inductance. Am Marge de gain.
m Marge de phase. J Moment d'inertie.
chC Moment du couple de charge. k Ordre du dpassement relatif. Im Partie imaginaire. Re Partie relle. m Ples de lquation caractristique d'un systme. Ta
Pseudopriode.
aw Pulsation amortie.
cw Pulsation de coupure d'un systme de premier ordre.
Rw Pulsation de rsonance. w0 Pulsation propre non amortie d'un systme de second ordre. w Pulsation.
Cours dautomatique et rgulation - V -
D Rgulateur Drive. I Rgulateur Intgral. PD Rgulateur Proportionnel Drive. PID Rgulateur Proportionnel Intgral Drive. PI Rgulateur Proportionnel Intgral. P Rgulateur Proportionnel.
chR Rsistance de charge. R Rsistance. s(t) Sortie d'un systme. tm Temps de monte. Tpic Temps de pic. t10% Temps de rponse 10%. t5% Temps de rponse 5%. t90% Temps de rponse 90%. Ts Temps de stabilisation tk Temps du dpassement relatif dordre k. LP-1 Transforme Laplace inverse. LP Transforme Laplace. p Variable de Laplace Vitesse de rotation angulaire. n Zros de lquation caractristique d'un systme.
Cours dautomatique et rgulation - VI -
Notion de systmes linaires asservis
Cours dautomatique et rgulation - A -
Chapitre 1
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 2
Chapitre 1 : Notion de systmes lineaires asservis
1. Notion de systmes 1.1. Dfinition
Un systme peut tre dfini comme un ensemble dlments exerant collectivement une fonction dtermine. Un systme communique avec lextrieur par lintermdiaire de grandeurs, fonctions du temps, appels signaux.
Dans la suite, on essaiera de garder les notations suivantes : x1(t)xN(t) pour les signaux dentre de commande. y1(t)yM(t) pour les signaux de sortie.
Les signaux de sortie dun systme sont aussi appels rponse du systme.
Remarque
Les systmes une entre et une sortie sont appels systmes monovariables ou systmes scalaires.
Un systme est connu par son action sur le milieu extrieur. Lorsquon applique certains signaux dentre, le systme se manifeste en mettant des signaux de sortie particuliers. Le systme est parfaitement connu par la connaissance des relations liant les entes avec les sorties.
Exemple Soit le circuit lectrique suivant :
( ) ( ) ( )dt.tiC1ti.Rtx +=
avec ( ) ( )dt.tiC1ty = .
On a donc lquation du systme : ( ) ( ) ( )txty
dttdy.C.R =+ .
1.2. Classification des systmes 1.2.1. Les systmes linaires
Un systme est linaire si la rponse de ce systme une combinaison linaire de signaux dentre est gale la combinaison linaire des rponses.
Si on applique lentre : ( ) ( ) ( )tx.btx.atx 21 += . On obtient en sortie : ( ) ( ) ( )ty.bty.aty 21 += . Cette proprit des systmes linaires est aussi appele principe de superposition.
SYSTEME x1(t) y1(t)
xN(t) yM(t)
SYSTEME y1(t)x1(t)
SYSTEME y2(t)x2(t)
R
( )tx C ( )ty ( )ti
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 3
1.2.2. Les systmes invariants Un systme est dit invariant (stationnaire) si la rponse du systme un signal x(t)
diffr dun temps est la mme que la rponse y(t) du systme mais diffre de .
Un systme invariant est aussi appel systme paramtres constants localiss ou
constantes localises. Cette proprit des systmes invariants est aussi appele principe de permanence.
Exemple: Moteur
Si on nglige lusure, le moteur nvolue pas dans le temps : le systme est invariant.
1.2.3. Les systmes modle dterministe Un modle dterministe ( stochastique) possde des entres et des paramtres non
bruits de telle faon que son comportement soit parfaitement prvisible en avance.
1.2.4. Les systmes asservis Ltude des systmes est destine commander au mieux les diffrents processus
rencontrs. Il existe deux solutions pour commander un systme :
1. Commande en boucle ouverte Dans ce cas, la commande est envoye en entre sans contrle sur les sorties.
Exemple :
Pour utiliser ce type de commande, il est ncessaire de connatre le systme et les
rponses aux commandes envoyes. Malgr tout, de multiples perturbations peuvent modifier laction de ces commandes : si la porte du four reste ouverte, les graduations du rhostat ne correspondent plus la temprature intrieure.
2. Commande en boucle ferme Pour amliorer les performances dune commande, il est indispensable dobserver
les sorties du systme pour les comparer ce que lon dsire obtenir. Dans ce deuxime type de commande, les sorties du systme sont contrles. Cest ce niveau que lon rencontre la notion de systme asservi.
( )tx Entre Entre
t-Sortie Sortie
t-
( )ty
( )tx
( )ty t t
tt
Rsistance chauffante Four Rhostat
MOTEUR Couple Courant
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 4
Un systme asservi est un systme dont le rle consiste essentiellement tablir une correspondance dfinie entre une ou plusieurs grandeurs dentre, de faibles niveaux nergtiques, et une ou plusieurs grandeurs de sortie de niveaux nergtiques plus levs.
Un systme asservi est caractris par la prsence de : Chanes directes: Elles comprennent des lments amplificateurs et ventuellement,
des convertisseurs de puissance, en liaison avec la source dnergie. Chanes de retour : Elle sont constitues dlments de prcision gnralement
passifs. Ce ne sont pas des chanes de puissance ; elles transmettent lentre des informations sur les grandeurs de sortie. Ces informations sont compares aux signaux dentre au moyen de comparateurs. Ces derniers laborent les diffrences ou carts entre les signaux dentre et les informations images des signaux de sortie.
Exemple : Chauffage dun immeuble
La figure A reprsente le systme. La temprature lintrieur de limmeuble est
fonction de la temprature T de leau chaude envoy dans les radiateurs et de la temprature extrieure e . Nous reprsentons cette description, volontairement simplifie par une boite munie dune sortie , dune entre de commande T la disposition de loprateur et dune perturbation e .
Le rayonnement solaire dans limmeuble, le vent ou dautres grandeurs agissant aussi sur la temprature . Cest volontairement que ces grandeurs ne sont pas prises en compte par notre modle qui doit, avant tout, tre simple. Cest lutilisateur qui rgle T, en
Systme
Figure A
Systme T a -
+
Figure B
Systme T a
P
- + + -
Figure C
e
T
e e
0
e e C
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 5
vue dobtenir C19= par exemple (en rgime permanent). Il sait, par exprience, quil obtient un bon rsultat en rglant T.
La figure B reprsente alors une premire tentative de rglage automatique de T, tel que ( e.aT ) = . Dans cette configuration, loprateur naura plus besoins de retoucher T en fonction de la temprature extrieure. En effet, T va varier automatiquement en sens inverse de e . Quand e0 = on a T=0, ce qui signifie quon doit bien entendue, couper le chauffage. Cette commande en boucle ouverte donne de bons rsultats.
La figure C reprsente une amlioration du rglage automatique de T. Supposons que par temps froide le soleil pntre lintrieur de limmeuble. La temprature va slever sans pour autant que la temprature T de leau des radiateurs ne soit rduite puisquil ne dpend que e . Il se produira une surchauffe et on doit modifier T, cest dire pour diminuer 0 . Il est clair que cette opration peut seffectuer de faon automatique en rendant 0 dpendant de la temprature effectivement atteinte dans limmeuble. Pour cela est compare une consigne C , rglable par lutilisateur laide dune boucle dasservissement.
1.3. Performances des systmes asservis 1.3.1. Notion de stabilit
On dit quun systme est stable, lorsque celui-ci tend revenir son tat dquilibre lorsquon lui applique une perturbation de courte dure.
1.3.2. Notion de rapidit La rapidit quantifie le temps de rponse du systme.
Le temps mis par la rponse pour ne plus dpasser 5% de la valeur finale. Ce temps est retenu comme critre de rapidit : t5%
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 6
1.3.3. Notion de prcision La prcision quantifie lerreur lorsque lquilibre est atteint.
Avec et ( )te ( )ts de mme nature. Autrement, lerreur est mesure la sortie du comparateur.
2. Notion de signal 2.1. Dfinition
Un signal dans un systme de commande automatique reprsente une grandeur physique qui peut tre une temprature, une force, une pression, une vitesse, une tension, un dbit. Ce signal peut tre sous forme logique (binaire), analogique, numrique (cod), selon la nature de commande : analogique ou numrique.
Dans notre cas, nous tudions les signaux analogiques relatif la commande linaire continue des processus. En pratique, un signal est une tension entre 0 et 5V ou un courant entre 0 et 20 mA, cas de processus industriels.
Un signal ( )ts est causal si ( ) 0ts = 0t < . Un signal ( )ts est dterministe si ( )ts est connu. Un signal ( )ts est alatoire si t tel que ( )ts est inconnu.
2.2. Signaux canoniques
Impulsion de Dirac Si alors 01 . Si 0 alors
1 .
( )te est une impulsion de Dirac idale.
Echelon de position Si : . 0t > ( ) 0ete =Si : . 0t < ( ) 0te =Si : est un chelon de 1e0 = ( )teposition unitaire not . ( )tu
Echelon de vitesse ( ) ( )tu.t.tgte = . Si 1tg = : ( ) ( )tu.tte =
( )te est appele chelon de vitesse unitaire.
t
e(t)
t
e(t)
e0
t
e(t)=(t)
1
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 7
Echelon dacclration ( ) ( )tu.t.ate 2= .
Si a=1 : appele chelon ( )te dacclration unitaire. unitaire.
Sinusode Sinusode ( ) ( ) ( )tu.tsin.Ete m( ) ( ) ( )tu.tsin.Ete m = . Si Em=1 : appele ( )te sinusode unitaire.
3. Rponses particulires dun systme scalaire On considre ici un systme scalaire, cest dire une entre et une sortie.
Pour connatre le comportement du systme et le comparer dautres systmes, on
tudie les rponses quelques signaux particuliers.
3.1. Rponse impulsionnelle On appelle rponse impulsionnelle, la rponse note ( )th , obtenue par lapplication
dune impulsion de Dirac )(t lentre du systme, celui- ci tant initialement au repos.
3.2. Rponse indicielle
On appelle rponse indicielle, la rponse note ( )t , obtenue par lapplication dun chelon unit lentre du systme, celui-ci tant initialement au repos. ( )tu
4. Rponse un signal quelconque
Dfinition de la convolution temporelle On considre un systme scalaire linaire invariant de rponse impulsionnelle ( )th .
Pour un systme scalaire, linaire et invariant, initialement au repos, la rponse un ( )ty
Systme x(t) y(t)
1
y(t)=h(t)
t t
)(t
t t
( ) ( )tty =( )tu1
t
e(t)
t
e(t)
Chapitre 1 Notion de systmes linaires asservis
Cours dautomatique et rgulation 8
signal dentre quelconque est donne par le produit de convolution entre et la rponse impulsionnelle du systme :
( )tx ( )tx
( ) ( ) ( ) ( ) ( )+
== thtxdv.vth.vxty
Cette expression est fondamentale. Elle permet, en connaissant le systme par sa rponse impulsionnelle et lentre( )th ( )tx , de dterminer ( )ty . Elle peut donc remplacer totalement lquation diffrentielle rgissant le systme.
Cette expression se note de faon condense : ( ) ( ) ( )thtxty = . est l'oprateur de convolution ; est la convolution du signal d'entre avec la rponse impulsionnelle du systme.
( )ty
Remarques Le produit de convolution est commutatif : ( ) ( ) ( ) ( ) (txththtxty )== . Limpulsion de Dirac et la rponse impulsionnelle (si x et y ont la mme dimension) sont homognes linverse dun temps. Ce sont des lments mathmatiques qui permettent de formaliser les comportements des systmes mais qui nont pas de ralit physique. Si limpulsion de Dirac est applique linstant zro, la rponse impulsionnelle est forcment nulle pour car vt < ( ) 0vth = , le systme tant suppos causal (cas des systmes physiquement ralisables). De plus, si le signal est lui-mme causal (appliqu au temps ), alors si 0t = ( ) 0vx = 0v < . Les bornes de lintgrale de convolution se simplifient et le produit de convolution scrit :
( ) ( ) ( )+
=0
dv.vth.vxty Exemple: Calcul de la rponse indicielle dun circuit RC partir de sa rponse impulsionnelle.
La rponse impulsionnelle dun circuit RC scrit : t
exp.1)t(h= avec C.R= .
On se propose dutiliser la convolution pour dterminer la rponse indicielle ( )t du circuit RC un chelon damplitude E partir de sa rponse impulsionnelle . ( )th
d).t(hEd).(u.E).t(h)t(u.E)t(h)t(w0 0
+ +=== .
Soit
=
== + +
)texp(1.E)texp(.Ed).texp(.1.E)t(w0 0
.
Les systmes linaires continus
Cours dautomatique et rgulation 9
Chapitre 2
Chapitre 2 Les systmes linaires continus
Chapitre 2 : Les systmes linaires continus
1. Prsentation On appelle systme dynamique un systme dont l'tude ne peut tre ralise quen
prenant en compte les valeurs passes du phnomne. Les grandeurs de sortie dpendent des valeurs prsentes et passes des grandeurs d'entres. Les phnomnes d'inertie (inertie mcanique, inertie thermique...) influent sur le comportement du systme.
Nous limiterons notre tude aux seuls systmes linaires continus et invariants.
1.1. Dfinition Un systme linaire est un systme pour lequel les relations entre les grandeurs
d'entre et de sortie peuvent se mettre sous la forme d'un ensemble d'quations diffrentielles coefficients constants. Les systmes linaires se caractrisent principalement par deux proprits, la proportionnalit et ladditivit.
1.2. Principe de proportionnalit Leffet est proportionnel la cause
Remarque L'effet de proportionnalit n'est effectif que lorsque le systme a atteint sa position d'quilibre ou que le rgime permanent s'est tabli.
La caractristique Entre/Sortie d'un systme linaire est une droite dont la pente
XY
est appele gain du systme.
Cours dautomatique et rgulation 10
Chapitre 2 Les systmes linaires continus
La rponse, en rgime dfinitif, dun systme linaire une entre donne est un signal de mme nature que lentre.
1.3. Principe d'additivit ou de superposition
Le principe de superposition est important car il va nous permettre, connaissant la
rponse d'un systme des sollicitations simples de dterminer par additivit et proportionnalit la rponse des sollicitations plus complexes.
2. Mise en quation dun systme linaire Un systme dynamique linaire peut tre reprsent par une quation diffrentielle
coefficients constants liant les grandeurs dentre et de sortie.
Systme linaire
Sortie y
Entre x
Lquation gnrale dun systme linaire est de la forme :
x.bdtdxb
dtdxb...
dtdxb
dtdxby.a
dtdya
dtdya...
dtdya
dtdya 012
2
21m
1m
1mm
m
m012
2
21n
1n
1nn
n
n +++++=+++++
Nous ne savons rsoudre dans le cas gnral que les quations diffrentielles du
premier et du second ordre et dans quelques cas particuliers des quations dordre suprieur.
Le problme de lautomatisation est plus complexe que la rsolution puisquil sagit de dterminer la loi dentre x qui permet dobtenir la sortie dsire y. La reprsentation par l'quation diffrentielle ncessite pour connatre la rponse une entre de rsoudre l'quation.
Principe de la rsolution La solution dune quation diffrentielle est la somme dune solution gnrale et de
la solution particulire. La solution gnrale reprsente la composante transitoire, la solution particulire reprsente la composante permanente. La solution gnrale est
Cours dautomatique et rgulation 11
Chapitre 2 Les systmes linaires continus
dtermine par la rsolution de l'quation sans second membre. La solution particulire est dtermine en fonction de la forme de ( )tx . Exemple circuit RC
C ue us
R En utilisant la loi des mailles on obtient :
==
dtdu
.Ci
)t(i.R)t(u)t(us
se
Do lquation diffrentielle en substituant i dans la premire quation :
dtdu
.C.R)t(u)t(u sse =
)t(udt
du.C.R)t(u ss
e +=
La solution gnrale est solution de lquation suivante :
0)t(udt
du.C.R ss =+
La solution est de la forme atg e.K)t(s =Par identification, on dtermine le coefficient a .
1
RC1a ==
Le coefficient K sera dterminer en fonction des conditions initiales.
La solution particulire dans le cas o 0e U)t(u = est solution de lquation ci-
dessous :
0ss U)t(u
dtdu.C.R =+
La solution particulire est de la mme forme que lentre. Ici 0p U)t(s =
La solution complte est la somme des deux solutions :
0RCt
pgs Ue.K)t(s)t(s)t(u +=+=
La dernire constante est dtermine en fonction des conditions initiales (on suppose ici que le condensateur est compltement dcharg).
0s UK0)0t(u ===
Do
= RC
t
0s e1U)t(u .
3. Transforme de Laplace L'tude des systmes s'accompagne invitablement de la manipulation d'quations diffrentielles. Or les oprations lies cette manipulation sont souvent dlicates et la rsolution des quations n'est pas toujours simple. Pour faciliter les calculs, on utilise un outil mathmatique puissant: la transforme de Laplace.
Cours dautomatique et rgulation 12
Chapitre 2 Les systmes linaires continus
Cours dautomatique et rgulation 13
3.1. Formulation mathmatique Soit une fonction relle de la variable relle t , dfinie pour toute valeur de t ,
sauf ventuellement pour certaines valeurs, en nombre fini dans tout intervalle fini, et nulle pour .
( )tf0t 0)
)0(f)0(f.p...)0(f.p)p(F.p 1n2n1nn +++
Intgration dt).t(f p )p(F Retard )t(f )p(F.e p
Changement dchelle
)t.a(f
apF.
a1
A ces proprits, on doit joindre les thormes suivants :
Thorme de la valeur finale : )t(flim)p(F.plim
t0p =
Thorme de la valeur initiale : )t(flim)p(F.plim
0tp =
Thorme de Borel : Si ( )tf et ( )tg ont respectivement pour transforme de Laplace ( )pF et ( )pG , alors ( ) ( ) ( )tgtfth = a pour transforme :
( )pG.p . ( ) ( )FpH =
Chapitre 2 Les systmes linaires continus
Thorme du dveloppement de Heaviside : Pour trouver loriginale dune fraction rationnelle
)p(G)p(F , o le degr de ( )pF est infrieur au degr de ( )pG , on la
dcompose en lments simples de premire espce, et lon applique la formule:
kat
1K
)ap(1e
)!1K(tLP =
3.3. Table des transformes de Laplace Il est souvent plus simple de calculer la transforme de Laplace dune fonction
partir de la transforme connue dune autre fonction en utilisant les proprits et thormes noncs. A partir de quelques rsultats de base, on peut ainsi retrouver rapidement les Transformes de Laplace de la plupart des fonctions utilises en lectronique ou en automatique dans les asservissements. Afin dviter le calcul systmatique de ces fonctions de base, on les regroupe dans des tables de Transformes de Laplace. Une table rsume des Transformes de Laplace les plus usuelles en lectronique est la suivante :
( )tf ( )pF )t( 1
)t()n( 0np n > A p
A
t.A pA
)!1n(t 1n
n entier 1n npA
Tt
Tt
Tt
TeTt
e1
e.T1
+
)Tp1(p1
)Tp1(p1Tp1
1
+
+
+
21 Tt
Tt
21ee
TT1
21 Tt
2Tt
121
e.Te.TTT
11
( )
+
12 Tt
21
Tt
22
2121 e.Te.TTT
1TTt
)pT1).(pT1(1
21 ++
)pT1).(pT1.(p1
21 ++
)pT1).(pT1.(p1
21 ++
Cours dautomatique et rgulation 14
Chapitre 2 Les systmes linaires continus
( )tf ( )pF Tt
3 e).tT(T1
Tt
2 e.Tt
Tt
e.Tt11
+
Tt
e).T2t(T2t++
2)Tp1(p
+
2)Tp1(1
+
2)Tp1.(p1+
22 )Tp1.(p1+
( )zcosArc
0tzw
20 tz1wsin.e.
z1w
0
=
+
( ) 1z0tz1wsin.e.z1
w0
tzw0 0
Chapitre 2 Les systmes linaires continus
( )tf ( )pF
Si : 22 ba >
+ tptp212 21 e1
e1
pp1
b1
avec
=+=
222
221
baapbaap
Si : 22 ba = ( )atat2 e.t.ae1a1 Si : 22 ba <
+
)wtcos.wwtsin.a(
we1
b1 at2
+=
)wtsin(.
we.b1
b1 at2
avec 22 abw = et awtg =
( )222 bap2p 1 ++
)wtsin(.e.w1 at ( ) 22 wap
1+
)wtcos(.eat ( ) 22 wapap+
)wt(sh.w1 22 wp
1
)wt(ch 22 wpp
)wt(sh.e.w1 at ( ) 22 wap
1
)wt(ch.eat ( ) 22 wapap
abee atbt
( ) )bp(ap
1
abe.ae.b atbt
( ) )bp(ap
p
abe).bc(e).ac( atbt
( ) )bp(ap
cp
+
)cb)(ca(e
)bc)(ba(e
)ac)(ab(e ctbtat
++
)cp)(bp)(ap(1
+++
3w.2)wtcos(.t.w)wtsin( 222 )wp(
1+
Cours dautomatique et rgulation 16
Chapitre 2 Les systmes linaires continus
( )tf ( )pF
)wtsin(.t.w21 222 )wp(
p+
w.2)wtcos(.t.w)wtsin( 222
2
)wp(p+
)wtsin(.t.w21)wtcos( 222
3
)wp(p+
)wtcos(.t 222
22
)wp(wp
+
=+=
)x(ch)ixcos()x(sh.i)ixsin(
avec Formules en
22 wp1
changer w en iw
+
2wt3
2
2wt
ewt.23coswt.
23sin3
w.3e
33 wp1+
+
2wt32
wt
ewt.23sin3wt.
23cos
w.3e 33 wp
p+
+ wt.
23cos.e.2e
31 2
wtwt
33
2
wpp
3
atbt
t.).ab(2
ee
bpap1
+++
t.e t4
a
pe pa
.t2
a3
t4a
e pae
( )atbt eet1
++
bpapLn
3.4. Exemple
us
R
C ue
i(t)
Cours dautomatique et rgulation 17
Chapitre 2 Les systmes linaires continus
Cours dautomatique et rgulation 18
Le comportement de chaque constituant est dcrit par les quations suivantes :
==
dtdu
.Ci
)t(i.R)t(u)t(us
se
Passons dans le domaine symbolique On pose :
)p(U)]t(u[L ss = , )p(U)]t(u[L ee = , )p(I)]t(i[L = . Nous savons que la drive premire dune fonction temporelle est :
)0(f)p(F.pdt
)t(dfL +=
, si )p(F)]t(f[L = de mme pour la drive seconde :
)0(f)0(f.p)p(F.pdt
)t(dfL 222 ++ =
Nous supposons que les conditions initiales sont nulles :
)p(I.R)p(U)p(U)t(i.R)t(u)t(u sese == )p(U.p.C)p(I
dtdu
.Ci ss ==
En substituant I(p), on obtient :
)p(U.p.1
1)p(U)p(U.C.R)p(U)p(U essse +==
On prend pour lentre , donc dans le domaine symbolique0e U)t(u = pU
)p(U 0e = .
pU
.p.1
1)p(U 0s +=
Dcomposition en lments simples :
+++=
++=+= p)p.1(
)p.1.(Bp.AU)p(UpB
p.1AU
pU.
p.11)p(U 0s00s
On dduit donc == A1B La dcomposition scrit
++
=p1
p.1U)p(U 0s
.
Do la solution :
= RC
t
0s e1U)t(u
Chapitre 2 Les systmes linaires continus
Cours dautomatique et rgulation 19
4. Srie de TD N1
Exercice n1 1. ( )exp.2)t(s1 t.5,0= 2. ( ) ( )t.1,0exp1.4)t(s2 =3. t3)t( s3 =Calculer la transforme de Laplace des signaux causaux, on vrifiera les thormes des valeurs finale et initiale. Donner la rponse indicielle de ces trois fonctions.
Exercice n2 Donner les transformes de Laplace des fonctions suivantes : 1. ( ) ( )tu.t.aexp.t)t(y1 = . 2. ( ) ( ) ( )tu.t.wsin.t.aexp)t(y2 = . 3. ( ) ( )tu.t.w . sin)t(y 23 =4. ( )tu.wt . sin.tsin)t(y .4 =Exercice n3 Inverser la transformation de Laplace (p est la variable de Laplace) en utilisant la table de Laplace.
1. 3p0,1
4(p)F1 += .
2. 2p3p
3(p)F22 ++
= .
3. ( )p1
p2exp0,5.(p)F3 += .
4. p)p(1p)24(1(p)F4 +
+= . Si est la rponse indicielle dun processus P, donner la rponse impulsionnelle. )t(f4
Exercice n4 Calculer la transforme de Laplace inverse de chacune des fonctions suivantes :
1. ( )
1pp
1pF1
+= .
2. ( ) ( ) ( )22pp1p 1pF 2.32 +++= . 3. ( )4p.p 1(p)F 43 += . 4.
10)p2(p1)p(p
p)3exp(1(p)F224 +++
= .
Reprsentation graphique des systmes linaires
continus
Cours dautomatique et rgulation 20
Chapitre 3
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 21
Chapitre 3 : Reprsentation graphique des systmes linaires continus
1. Fonction de transfert
Un systme linaire dentre ( )tx et de sortie ( )ty est rgi par une quation diffrentielle coefficients constants du type :
x.bdtdxb
dtdxb...
dtdxb
dtdxby.a
dtdya
dtdya...
dtdya
dtdya 012
2
21m
1m
1mm
m
m012
2
21n
1n
1nn
n
n +++++=+++++
Si on crit la transformation de la Laplace de lquation diffrentielle conditions initiales nulles on trouve :
)p(X)p(Y)p(H = appele fonction de transfert ou transmittance du systme :
( )pH est appele fonction de transfert du systme.
Le but de cette reprsentation est de pouvoir dterminer les caractristiques de la sortie connaissant la fonction de transfert ( )ty ( )pH du systme et le signal dentre ( )tx . On peut mettre ( )pH sous la forme :
01n
1nn
n
01m
1mm
m
a.......p.ap.ab.......p.bp.b
)p(X)p(Y)p(H +++
+++==
( )pH peut scrire sous la forme : ( )
)pp)......(pp).(pp()zp)......(zp).(zp(kpH
n21
m210
= ;
Lensemble des forme les zros deiz ( )pH , lensemble des forme les ples deip ( )pH , et n est lordre de systme.
Exemple Le circuit intgrateur : circuit RC : ( ) ( ) += dt).t(iC1ti.Rtx . ( ) ( )ty
dtdy(t).RCtx += .
avec y(t) = ( ) = dt).t(iC1ty
( )txL
P LP
( )pH( ) ( )( )txLPpX =
( ) ( )( )pYLPty 1=
( ) ( ) ( )pX.pHpY =
y(t)
R
x(t) C
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 22
On appliquant la transforme de Laplace on trouve :
( ) ( ) ( )pXpYpY.p.RC =+ ( ) ( ) ( )pXpY.1p.RC =+ Do la fonction de transfert de ce systme ( )
p.RC11
X(p)Y(p)pH +== .
2. Diagramme fonctionnel 2.1. Dfinition Le diagramme fonctionnel ou schma bloc, constitue une reprsentation graphique dun systme asservi ou dune partie du systme. Chaque diagramme fonctionnel est constitu dun certains nombre de symbole graphique qui sont :
Elment ou groupe dlment :
* Comparateur algbrique * Branchement dun signal
2.2. Exemple de schma bloc dun systme en boucle ferme
2.3. Rgles de simplification 2.3.1. Mise en srie Soit un systme form par la mise en srie de deux sous systmes de fonction de transfert et . La fonction de transfert de lensemble est( )pG1 ( )pG2 ( ) ( ) ( )pG.pGpG 21= .
Equivalent :
( ) ( )pG.pG 21 ( )pX ( )pY
( )pG ( )pY ( )pX
( )pY
( )pX ( )p + _ ( )pY
( )pY
( )pG1 ( )pY ( )pX ( )p+ _ ( )pG2
Capteur
Deux signaux de mme nature
( )pG1 ( )pG2( )pX ( )pY
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 23
2.3.2. Mise en parallle Soit un systme form par la mise en parallle de deux sous systmes de fonction de
transfert et . La fonction de transfert de lensemble est : .
( )pG1 ( )pG2( ) ( ) ( )pGpGpG 21 +=
Equivalent :
2.3.3. Structure en boucle ferme
Equivalent :
On a ( ) ( ) ( )pG.ppY 1= et ( ) ( ) ( ) ( )pG.pYpXp 2= .
)p(G)).p(G).p(Y)p(X()p(Y 12= .)p(X).p(G))p(G).p(G1).(p(Y 121 =+ .
Do ( ) ( )( ) ( )pG.pG1pG
)p(X)p(YpF
21
1
+== : Formule de Black.
)p(G)p(T 1= : Fonction de transfert en boucle ouverte. )p(F : Fonction de transfert en boucle ferme.
Remarques :
* Dans le cas o 1)p(G2 = ( ) ( )( )pG1pG
)p(X)p(YpF
1
1
+== .
)(pF a une chane de retour de transmittance 1.
* Il est toujours possible de ramener un systme retour non unitaire un systme retour unitaire.
( )pY ( )pX ( )pF
( ) ( )pGpG 21 + ( )pX ( )pY
( )pG1 ( )pY ( )pX +
+( )pG2
( )pG1 ( )pY ( )pX ( )p+ _ ( )pG2
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 24
Equivalent :
2.3.4. Dplacement des nuds dinformations
De lamant laval
De laval lamant
2.3.5. Permutation de deux nuds successifs
2.3.6. Dplacement de sommateurs
De lamant laval
( )pY( )pX ( )p+ _ ( ) ( )p2G.pG1 )p(G1
2
( )pG1 ( )pY ( )pX ( )p+ _ ( )pG2
G(p)
X(p)
Y(p) X(p) = G(p)
X(p)
Y(p) X(p)
)(1pG
G(p)
Y(p)
Y(p) X(p) G(p)
Y(p)
Y(p) X(p)
G(p)
=
N1 N2
N1 N2 =
G(p) G(p) Y(p) + + X1(p)
X2(p)
Y(p) + + X1(p)
X2(p) G(p)
=
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 25
De laval lamant
2.3.7. Permutation de deux sommateurs successifs
2.4. Principales transmittances lectriques et mcaniques
Rsistance
Inductance
Condensateur
Ressort
Frottement visqueux
(amortisseur)
Masse
Inertie en rotation
G(p) Y(p)+ + = X1(p)
X2(p)
G(p) Y(p) + + X1(p)
X2(p) )(1pG
= Y(p)+ + + + X(p)
X1(p) X2(p)
Y(p)+ + + + X(p)
X2(p) X1(p)
F(p) X(p)
R i
u u=Ri
R U(p) I(p)
1/R I(p) U(p)
I(p) U(p)
L i
u dtdi
Lu =
U(p) Lp
I(p)
1/Lp
i
u
C
= idtC1
u
I(p)
U(p) I(p)
U(p) 1/Cp
Cp
FF
F=KxF(p) X(p)
K
1/K
dt
dxfvF =
F F X(p) F(p)
fv.p
F
m dt
xdmF = X(p) F(p) m.p
w (p)
dt
dwJC = C(p)J.p
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 26
2.5. Applications 2.5.1. Systme lectronique
Les quations rgissant ce systme sont :
( ) ( ) ( )( ) ( ) ( )
=
=
32
11
RpSpUpI
RpVpEpI
( ) ( ) ( )( ) ( ) ( )( )
( ) ( )
==
+=
p.CpIpS
pIpIRpU
pUp.CpIpV
2
2
212
1
1
Le diagramme fonctionnel relatif ces systmes dquations :
Avec : p.C.R1
1
p.C.R11
p.C.R1
B23
23
231 +=+
=
e(t)
R1 R3
R2
C1
C2 s(t) v(t) u(t)
i2(t)i1(t)
1R1
E(p) _
+
pC1
1
R2 S(p)_ +_ + 3R
1
pC1
2
V(p) + +
U(p)I1(p) I2(p)
1R1
E(p) _
+
pC1
1
R2 S(p)_ +_ + pC.R1
23
pC2
B1 +
+ V(p)
U(p)I1(p)
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 27
Avec : p.C.R.B1
B.RB221
122 +=
Avec :
++=
p.C.B1
B1
RR1
RB
B
12112
12
3
1R1
E(p) _
+
pC1
1
R2 _ +
pC2
B1
1B1
B2
+ +
V(p)
S(p) U(p)I1(p)
1R1
E(p)
pC1
1
_ + B2
1B1+
+
S(p)
V(p)
I1(p)
E(p)
pC.B1
12
_ +
1B1+
+V(p)
S(p) 21
B.R1
E(p)
pC.B1
B1
121+
_ +
B3
1
2
RB
V(p)
S(p)
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 28
2.5.2. Moteur courant continu Vu de lextrieur, la machine peut tre reprsente par la mise en srie dune
rsistance R, d'une inductance L et dune f.e.m vide donne par la relation Ev.KEv = , si est la vitesse de rotation. Nous supposerons que l'ensemble fix l'arbre
de la machine est de moment d'inertie J et que le moment du couple de frottement est .fC = (frottement visqueux).
Equation lectrique : )t(.K
dt)t(di.L)t(i.R)t(e ++=V
Soit en variable de Laplace )p(.K)p(I.p.L)p(I.R)p(Ve ++= Equation mcanique : )t(C)t(.f)t(i.K
dt)t(d.J ch=
Soit en variable de Laplace )p(C)p(.f)p(I.K)p(.p.J ch= )t(Cch est le moment du couple de charge. Si lon suppose que la charge mcanique
de notre moteur est une gnratrice courant continu dbitant sur une charge , alors on peut dire que :
chR
.R
KRE.KI.KC
chchchch === soit '.K.R
KCch
ch == . Le systme peut tre reprsent par :
On peut crire alors :
p.Jf)p(C
)p(I.p.Jf
K)p( ch++= et )p(.p.LRK
p.LR)p(V
)p(I e ++= Le digramme fonctionnel de ce systme est le suivant :
Ve(p)
Systme Ve(p) )p(
Cch(p)
p.LR1
+
p.LRK
+
+ _ _
+ Ve(p) )p(
Cch(p)
I(p) p.Jf
K+
p.Jf1
+
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 29
3. Lieux de transfert 3.1. Introduction On applique au systme une entre harmonique : ).wtsin(.u)t(u o= En rgime permanent ; on admet que la sortie est galement un signal sinusodal dphas ; on a donc : ).wtsin(.u.A)t(y o += On peut dire la mme chose de lentre ).wtcos(.u)t(u o= Donc galement de lentre qui ; daprs le thorme de superposition nous donne la sortie :
jwtooo e.u)wtsin(.u.j)wtcos(.u)t(u =+=
.e.u).w(A)wtsin(.u).w(A.j)wtcos(.u).w(A)t(y jwtooo +=+++=
Plus gnralement ; on peut donc considrer une entre de la forme ; qui nous
donnera une sortie de la forme :
jwto e.u
.e.u).w(A jwto+
Appliquons cette entre lquation diffrentielle ;
x.bdtdxb...
dtdub
dtduby.a
dtdya...
dtdya
dtdya 011m
1m
1mm
m
m011n
1n
1nn
n
n ++++=++++
On obtient : [ ][ ] jwto001m1mmm
)wt(jo
00
1n1n
nn
e.u.)jw.(b...)jw.(b)jw.(b
e.u.A.)jw.(a...)jw.(a)jw.(a
+++=+++
+
.
Ou bien : [ ][ ]001n1nnn
00
1m1m
mmj
)jw.(a...)jw.(a)jw.(a)jw.(b...)jw.(b)jw.(b
e.A)jw(u)jw(y
++++++==
.
Il apparat dans cette expression que le terme de droite nest rien dautre que la fonction de transfert dans la quelle on a remplac les "p" par des "jw". On a donc : ; )jwp(He).w(A j ==o A est le gain en amplitude du signal et le dphasage de ce signal.
3.2. Interprtation dans le plan complexe
)wt(j
o e.u.A+ est le vecteur damplitude A et de dphasage par rapport au vecteur
dorigine : . jwto e.u
Re
Im
[ ])wtsin(.j)wtcos(u).w(A o +++[ ])wtsin(.j)wtcos(uo +
[ ])wtcos(u).w(A o +
[ ])wtsin(u).w(A o +
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 30
On obtient donc le gain en prenant le module du nombre complexe et le
dphasage
)w(A )jw(H
en recherchant langle )cossintg(
= donc :
=
=
))jw(HRe())jw(HIm(arctg
;)jw(H).jw(HA *
Remarque : Attention la dfinition de larctg : on doit en considrer deux dfinitions diffrentes pour les demi-plans rels positifs et ngatifs.
Pour les parties rels positifs : La dfinition prcdente est bonne.
=
))jw(HRe())jw(HIm(arctg
Pour les parties rels ngatifs : .))jw(HRe())jw(HIm(arctg
+=
Lorsque la partie relle est nulle, on na pas besoin de cette dfinition, on considre directement laffixe (le vecteur est sur laxe des imaginaires).
01n
1nn
n
01m
1mm
m
a...)jw.(a)jw.(ab...)jw.(b)jw.(b)jw(H +++
+++=
Pour un systme physique; le gain tend vers 0 quand la frquence tend vers ; on a donc : m
Chapitre 3 Reprsentation graphique des systmes linaires continus
Dans le plan complexe, le lieu de Nyquist reprsente pour chaque point (frquence donne); la partie relle en l'abscisse; la partie imaginaire en l'ordonne.
3.3.3. Lieu de Black Le lieu de Black est une reprsentation comportant en abscisse; la phase en chelle linaire; et en ordonne le gain; en chelle linaire; mais exprim en dcibels.
3.3.4. Abaque de Black Le diagramme de Black est une reprsentation de la rponse harmonique du systme, c'est dire une reprsentation de ( )jwH quand parcourt R, o est la fonction de transfert du systme.
w ( )pHo en abscisse: phase (en degrs) o en ordonne: gain (en dcibels)
Cours dautomatique et rgulation 31
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 32
4. Srie de TD N2
Exercice n1 : Dduire les diagrammes fonctionnels suivants afin de se ramener dans les deux cas la structure suivante :
et donner les expressions de D(p) et de R(p). Cas 1 :
Cas 2 :
_ + E(p) S(p)
R(p)
D(p)
_ + G3 G1 E(p) + + _ +_
G2 + +
H2
H1
H3
S(p)
E(p) 2R
1 S(p) 1R
1pC
12
_ + _ +
pC11
_ +
Chapitre 3 Reprsentation graphique des systmes linaires continus
Cours dautomatique et rgulation 33
Exercice n2 : Simplifier le schma fonctionnel suivant et dterminer sa fonction de transfert.
Exercice n3 : Dterminer la transmittance des circuits suivants : 1-
2-
_ + G1 G3
G2
H1
++
_ +H2
G4
E(p) S(p)
e(t)
R1 C1
C2s(t)
R3
R2 I1 I
I2 I3 I4
V1 V2
e(t) s(t)
R
C
R
C
Etudes des systmes lmentaires
Cours dautomatique et rgulation 34
Chapitre 4
Chapitre 4 Etude des systmes lmentaires
Chapitre 4 : Etudes des systmes lmentaires
1. Etude d'un systme de premier ordre 1.1. Etude temporelle
1.1.1. Dfinition Un systme physique dentre e(t) et de sortie s(t) est du premier ordre, sil est rgi par une quation diffrentielle du premier ordre coefficients constants :
)t(e.K)t(sdt
)t(ds =+ o K est le gain du systme et est la constante du temps. Si les conditions initiales sont nulles (s(0)=0), la fonction de transfert dans le domaine de Laplace scrit : ( ) )p(E.K)p(S.1p. =+ Soit
p.1K
)p(E)p(S)p(H +==
1.1.2. Rponse impulsionnelle Lentre est dfinie par )t()t(e = , soit dans le domaine de Laplace E(p)=1.
La sortie a donc pour expression dans le domaine de Laplace : .p1
K
p.1K)p(S
+=+=
La rponse temporelle a donc pour expression : )t(u.e.K)t(st
= .
La reprsentation graphique de la rponse impulsionnelle dun systme de premier ordre est donne par la figure ci-dessous :
Cours dautomatique et rgulation 35
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 36
1.1.3. Rponse indicielle
Lentre est dfinie par e(t)=u(t), soit dans le domaine de Laplace .p1)p(E =
La sortie a donc pour expression dans le domaine de Laplace : .)p.1(p
K)p(S +=
Une dcomposition en lments simples nous donne : p.1
.KpK
p.1B
pA)p(S
+=++= .
La rponse temporelle a donc pour expression : )t(ue1K)t(st
= .
La reprsentation graphique de la rponse indicielle dun systme de premier ordre est donne par la figure ci-dessous :
Particularits : Pente lorigine.
t
e.K)t('s= do
K)t('slim0t
=+ . Temps de rponse 5%.
On cherche t5% tel que s(t5%)=0.95.K.
%5t
e05.0= soit
%5t05.0Ln =
.3t %5 . Dtermination exprimentale des paramtres du modle dordre 1. Utiliser la valeur finale pour dterminer le gain K. Utiliser la pente lorigine pour dterminer la constante de temps . Utiliser 63% de la valeur finale pour dterminer la constante de temps .
1.1.4. Application Rponse un chelon de vitesse (rampe)
x(t) = a.t, on obtient alors : 2pa.
p.1K)p(Y += .
p.a.K
pa.K
p.1.a.K
p1.
p11.Ka)p(Y 22
++=+
= .
Do ).t(u.texp.)t(.Ka)t(y
+=
Pente lorigine : ( ) )0('sKtg ==
Chapitre 4 Etude des systmes lmentaires
1.1.5. Relation tempsfrquence Le comportement dynamique dun systme est entirement dcrit par sa constante
de temps. Cette dynamique est aussi appel espace frquentiel. On dfinie pulsation de coupure
1wc = , donc la frquence de coupure est .2 1=cf . On appelle temps de monte du systme : cest le temps ncessaire pour passer
de10% de la valeur finale de la sortie 90 % de la valeur finale pour un chelon dentre.
)t(u).texp(1(K)t(w = . On a et K.1,0)t(w %10 = k.9,0)t(w %90 = Or %10%90m ttt =Aprs tout calcul fait on obtient tm=2,2. Donc
cm f
35.0t = .
1.2. Etude harmonique
( )p.1
KpH += et en posant p=jw ( ) wj1jwHK
+= . )jexp(.H))w(jArctgexp(.
)w(1)w.j(H K =+=
( ) ( )
+=+=+
++=w1
K)H(jw)(Imw1K)H(jw)(Re
.w1jK
.w1KH(j.w)
.
Dans la pratique trois mthodes de reprsentations sont utilises.
Cours dautomatique et rgulation 37
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 38
1.2.1. Reprsentation de Bode On trace les deux courbes suivantes :
dBwjH ).( de la fonction )w.j(H en fonction de la pulsation w.
))w.j(H(Arg= de la fonction )w.j(H en fonction de la pulsation w. Reprsentation du module en dB
( ) ( ) ( )[ ]21010210dB w.1log.10Klog.20w.1 Klog.20)w.j(H +=+= Etude des asymptotes
Pour 1ww
c> ( )w.log.20)w.j(H 10dB .
( ) ( )( )110110dB1dB1 w.log.20w.10.log.20)w.j(H)w.10.j(H = ( ) ( )( )110110 w.logw.10.log.20 = ( ) dB2010log.20w.
w.10.log.20 101
110 ===
Cest une droite de pente 20dB/dcade. ou ( ) ( )( )110110dB1dB1 w.log.20w.2.log.20)w.j(H)w.2.j(H = ( ) ( )( )110110 w.logw.2.log.20 = ( ) dB62log.20w.
w.2.log.20 101
110 ===
Cest une droite de pente 6dB/octave.
Reprsentation de la phase = w.arctg))w.j(H(Arg = . Etude des asymptotes Pour 0w 0= : asymptote horizontale. Pour
1w = 4
1Arctg == . Pour w
2arctg))w.j(H(Arg === : asymptote horizontale
2 = .
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 39
1.2.2. Reprsentation de Nyquist
On trace la courbe ( ) ( )( )( )jwHRef).j(HIm = Soient ( )( )jwHRex = et ( )( )jwHImy = . Do ( )2w.1
Kx += (1) ; ( )2w.1w..Ky
+= (2)
(y
Chapitre 4 Etude des systmes lmentaires
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0K/2
-K/2
K
0
Im Re
w w 0
wc
1.2.3. Reprsentation de Black On reprsente ( )fGdb = : Cest un diagramme contract obtenu en liminant w. Etude des asymptotes :
Pour 0w Klog.20)w.j(H 10dB ; =0.
Pour 1w = dB3Klog.20)w.j(H 10dB = ; 4
= .
Pour w 2
et)w.j(H dB .cest une asymptote.
-90 -75 -60 -45 -30 -15 0-70
-60
-50
-40
-30
-20
-10
0Nichols Chart
pp
()
wc -3dB
GdB
Phase
Cours dautomatique et rgulation 40
Chapitre 4 Etude des systmes lmentaires
Exemple
C x(t)
R Le circuit intgrateur : circuit RC :
( ) ( ) += i(t).dtC1ti.Rtx y(t) avec ( ) = i(t).dtC1ty
( ) ( ) ( )tydt
tdy.RCtx += On conclue que = RC et K=1. ( ) ( ) ( )ty
dttdy.tx +=
A.N. : R=10k ; C=10F ; 1,0= et K=1.
W(rd/s) 0 0.01 0.1 0.12 0.5 1 2 5 10 20 50 100 200 500 103
H
dbH
)jw(H(e
)jw(HIm(
Remplir le tableau. Faire ltude temporelle et dgager les diffrents paramtres (fc, tm, ). Effectuer ltude harmonique par les trois mthodes.
2. Etude d'un systme de second ordre 2.1. Dfinition Un systme physique dentre e(t) et de sortie s(t) est du deuxime ordre, sil est rgi par une quation diffrentielle du second ordre coefficients constants :
)t(e.K)t(sdt
)t(ds.w
z.2dt
)t(sd.w1
02
2
20
=++
o K est le gain du systme. w0 est la pulsation propre non amortie positif. z est le coefficient damortissement positif.
Cours dautomatique et rgulation 41
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 42
Si les conditions initiales sont nulles (s(0)=s(0)=0) , la fonction de transfert dans le
domaine de Laplace scrit : )p(E.K)p(S.1pw
z2pw1
0
220
=
++
Soit 1p
wz.2
wp
Kwp.w.z.2p
w.K)p(E)p(S)p(H
020
2200
2
20
++=++==
2.2. Etude temporelle 2.2.1. Rponse impulsionnelle Lentre est dfinie par )t()t(e = , soit dans le domaine de Laplace E(p)=1. La sortie a donc pour expression dans le domaine de Laplace :
200
2
20
wp.w.z.2pw.K)p(S ++= .
Discriminant : ( )1zw4 220 = . Cas 1 : z>1 , le systme est amorti est le dnominateur possde deux racines relles : 0> ( ) .01zzwp 2021
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 43
Cas 3 : z
Chapitre 4 Etude des systmes lmentaires
Reprsentation graphique :
s()=K.E
t10% tm
t90% t5%
Particularits : Pente lorigine :
( )tptp2
20 21 ee
1z2
Kw)t('s
= do 0)t('slim
0t=+
Temps de rponse 5% : Il ny pas de formule simple. Temps de monte :
tm=t90% t10% Cas 2 : z=1, amortissement critique. La sortie dans le domaine de Laplace scrit :
.pK
wpK
)wp(w.K
p.)wp(w.K
)p(S0
20
02
0
20 ++
++=+=
La rponse temporelle a pour expression : ( )( )tw0 0etw11K)t(s += . Particularits : Pente lorigine.
( )( ) tw20000tw 00 e.w.Kwtw1we.K)t('s =+= do 0)t('slim0t
=+ Temps de rponse 5%.
Il ny pas de formule simple.
Cas 3 : z
Chapitre 4 Etude des systmes lmentaires
On modifie le dnominateur dordre 2 pour faire apparatre un carr parfait :
( ) ( )22020 02020220202 0 z1ww.zpw.z.K.2p.K
pK
ww.zw.zp.w.z.2pw.z.K.2p.K
pK)p(S
+++=+++
+= .
Une nouvelle transformation permet didentifier les transformes de Laplace des cosinus et sinus amortis :
( ) ( ) ( ) ( )
++
+++= 2
20
20
20
2220
20
0
z1ww.zp
z1w
z1
z
z1ww.zp
w.zpp1K)p(S .
La rponse dans le domaine temporel scrit donc : ( ) ( ) .t.z1wsin.e.z1
zt.z1wcos.e1K)t(s 20tzw
22
0tzw 00
=
On pose zcos = et 2z1sin = . La rponse temporelle scrit : ( ) .t.z1wsin.e.
z1
11K)t(s 20tzw
20
+
=
Reprsentation graphique :
Particularits : Pseudopriode.
La rponse prsente des oscillations amorties dont la priode, appele pseudopriode, est :
a20w2
z1w
2Ta =
= o 20a z1ww = est la pulsation amortie.
Pente lorigine. ( )t.z1.wsin.e.z1
w.K)t('s 20tzw
20 0
= donc 0)t('slim
0t=+ et la pente est nulle.
Dpassements relatifs. Les dpassements relatifs sont donns pour les instants tk tels que s(tk)=0.
Donc 2
0k
z1wkt
= avec k entier.
On dfinit le dpassement relatif dordre k par :
( ) 2k0 z1 .k.zk202tzwkrk et.z1wsin.z1e)(s )t(s)(sD
=+
==
.
Cours dautomatique et rgulation 45
Chapitre 4 Etude des systmes lmentaires
Les dpassements relatifs ne dpendent donc que du coefficient damortissement z :
2z1
.k.z
rk eD
=
. On utilise cette particularit pour identifier z partir dun trac exprimental modlisable par une fonction de transfert de second ordre. Le premier dpassement est retenu et on a :
( )( )21r2
21r
DlnDlnz += avec )(s
DD 11r = . (Voir annexe)
Temps de rponse.
Il ny a pas dexpression simple. Un abaque donne la valeur du temps de rponse rduit, t5%.w0, en fonction du coefficient damortissement. Le temps de rponse minimum est obtenu pour un dpassement relatif de 5% ce qui correspond un coefficient damortissement de valeur z=0,7. On a alors : t5% : w0=3.
Pulsation de rsonance Pour z< 0,7 Alors la rponse prsente une rsonance pour la pulsation :
z1ww 0R = Temps de stabilisation
Le temps de stabilisation est dfinit par : Ts 3/z.w0 5% pour z< 0,7. Ts 4/z.w0 2% pour z< 0,7.
0 100 200 300 400 500 6000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Step Response
Time (sec)
Ampl
itude
z=0.1
z=0.3
z=0.5 z=0.7
z=1
z=2
Cours dautomatique et rgulation 46
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 47
2.3. Etude harmonique On a jwp = , ce qui donne :
0
2
0
022
0
20
ww.z.j.2
ww1
Kw.w.z.j.2ww
w.K)w.j(H
+
=+=
On a alors : ( ) ( )( )2202440102010dB w.w.2z.4ww10.log-w.Klog.20)w.j(H ++= ( )
+
=
2
0
22
01010dB w
w.z.2ww110.log-Klog.20)w.j(H
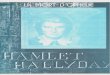
2.3.1. Diagrammes de Bode A/ Reprsentation du module
( )
+
=
2
0
22
01010dB w
w.z.2ww110.log-Klog.20)w.j(H
Etude des asymptotes :
Pour 1ww
0>
010dB w
wlog40)w.j(H .
=
0
110
0
110dB1dB1 w
wlog.40w
w.10log.40)w.j(H)w.10.j(H
=
0
110
0
110 w
wlog.40w
w.10log.40 ( ) dB4010log.40www
w.10
log.40 10
0
1
0
1
10 ==
=
Cest une droite de pente 40dB/dcade.
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 48
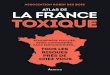
B/ Reprsentation de la phase
ou
=
0
110
0
110dB1dB1 w
wlog40ww.2log40)w.j(H)w.2.j(H
=
0
110
0
110 w
wlog.40ww.2log.40 ( ) dB122log.40
wwww.2
log.40 10
0
1
0
1
10 ==
=
Cest une droite de pente 12dB/octave.
.arctg))w.j(H(Arg == 20
0
ww1
ww.z.2
arctg)w.j(H
=
Etude des asymptotes :
On a asymptote horizontale de
Pour 0w 0 : asymptote horizontale.
Pour 0w w = ( ) 2Arctg +=
=
Pour w ( ) =
= 0 arctg))w.j(H(Arg= .
10-3 10-2 10-1 100 101-100
-80
-60
-40
-20
0
20
Pulsation W
G dB
-3 dB
f1 10.f1
-40 dB/dec
wo
20.logK
z=2 z=1
z=0.7 z=0.5
z=0.1
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 49
10-3 10-2 10-1 100 101-200
-150
-100
-50
0Pulsation W Dephasage
-90
-180
wo
z=2
z=1 z=0.7 z=0.5
z=0.1
Chapitre 4 Etude des systmes lmentaires
2.3.2. Reprsentation dans le plan de Nyquist ( )( ) ( ) ( ) ( )2022202
02
0222
0
220
20
w.w.z.2ww
w.w.K2j
w.w.z.2ww
ww.w.K)w.j(H
+
+=
-3 -2 -1 0 1 2 3-6
-5
-4
-3
-2
-1
0Re Im
z=0.1
z=0.5
z=0.7 z=1
z=2
2.3.3. Reprsentation dans le plan de Black 20log ( )f)w.j(Hlog.20 10 = Cest un diagramme contract obtenu en liminant w. Etude des asymptotes :
Pour 0w kwjHdB
log20).( ; =0. Pour 0w w = dBkwjH dB 3log20).( = ; = 2
=
22z
Pour w dB)w.j(H et = y .Cest une asymptote.
-180 -135 -90 -45 0-120
-100
-80
-60
-40
-20
0
20Nichols Chart
z=0.1
z=0.7 z=1
z=2
GdB
Dephasage
Cours dautomatique et rgulation 50
Chapitre 4 Etude des systmes lmentaires
2.3.4. Exemple Le circuit Oscillateur amorti :
dt)t(iC1i(t) R
dt)t(diL x(t) ++=
x(t) y(t) C L R
avec dt)t(iC1)t(y =
)t(ydt
)t(dy RC dt
)t(ydLC x(t) ++= 1RCpLCp
1 H(p) ++= Identifions les paramtres :
LC1 w0 = est la pulsation propre dun circuit oscillant LC.
CL.2
R z = est le facteur damortissement.
A.N. : R=100 ; C=100F et L=1H.
W(rd/s) 0 0.1 1 2 5 10 20 50 100 200 500 103 2.103 5.103 104
H
dbH
)jw(H(e
W(rd/s)
Remplir le tableau. Faire ltude temporelle et dgager les diffrents paramtres (fc, tm, ). Effectuer ltude harmonique par les trois mthodes.
Cours dautomatique et rgulation 51
Chapitre 4 Etude des systmes lmentaires
3. Srie de TD N2 Exercice n1 :
Un systme physique a pour fonction de transfert : )20p4p).(1p(
2p)p(H 2 ++++=
1. Dcomposer H(p) en lments simples. 2. En dduire la rponse impulsionnelle du systme.
Exercice n2 : Soit un processus linaire dfini par la fonction de transfert suivante :
)5p2p).(1p(4pp)p(F 2
2
+++++= transforme de f(t).
1. Calculer f(0) et )(f + partir de F(p). 2. Dcomposer F(p) en lments simples et en dduire la rponse impulsionnelle f(t). 3. En dduire la rponse indicielle s(t), vrifier en calculant directement s(0) et )(s +
partir de F(p). Exercice n3 : On considre le rseau suivant :
K100R1 = ; K200R2 = ; F10C1 = ; F50C2 = .
1. Dterminer la fonction de transfert )p(Ve)p(Vs et en dduire la nature de ce correcteur.
2. Tracer dans le lieu de Bode la rponse harmonique relle. Exercice n4 : Soit le rseau suivant
Avec K1R = ; H1L = et F100C = .
Cours dautomatique et rgulation 52
Chapitre 4 Etude des systmes lmentaires
Cours dautomatique et rgulation 53
1. Montrer que la fonction de transfert du rseau peut se mettre sous la forme :
2BpAp1K)p(F ++= en prcisant les valeurs de K, A et B.
2. En dduire le gain statique, la frquence propre non amortie et le coefficient damortissement du rseau.
3. En dduire que la fonction de transfert prcdente est quivalente deux lments du premier ordre en srie.
Exercice n5 : On souhaite identifier un systme par une analyse harmonique. Pour ceci on enregistre la rponse du procd des sinusodes A.sin(wt) pour diffrentes valeurs de w. on relve la phase (en degrs) et le gain G (en dB).
W(rd.s-1) (degrs) G(db) 0
0.1 0.3 0.5 0.7 0.8 0.9
1.00 2 3 5
10
0 -5.8
-18.2 -33.7 -53.9 -65.8 -78.1 -90.0
-146.3 -159.4 -168.2 -174.2
20.00 20.04 20.37 20.90 21.25 21.14 20.7 20.0 8.9 1.4 -7.8 -20
1. Dessiner ces courbes dans le plan de Bode. 2. Dire en le justifiant sil sagit dun systme du premier ou du deuxime ordre. 3. donner la fonction de transfert du prcd.
Exercice n6 : Reprsenter dans le plan de Nyquist, Bode et Black le lieu des fonctions de transfert suivantes :
1. Intgrateur pur : p1)p(H = .
2. Drivateur pur : p)p( . H =3. Double intgrateur pur : 2p
1)p(H = . Exercice n7 : On considre un systme du second ordre ayant comme fonction de transfert :
2
00 wpp
wz21
K)p(H
++
=
avec z=0,1 ; K=1 et w0=1.
Ce systme est insr dans une boucle retour unitaire afin deffectuer un asservissement.
1. Le systme en boucle ouverte possde-t-il des rsonances ? 2. Tracer H(p) dans le diagramme de Bode en boucle ouverte puis en boucle ferme.
H(p)E(p) + - S(p)
Chapitre 4 Etude des systmes lmentaires
Exercice n8 :
1. Tracer H(p) dans labaque de Black en prenant les points suivants pour la pulsation w :
w (rd/s) 0.4 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 2. Dterminer laide de labaque de Black le facteur de surtension Mw et la pulsation de
rsonance wRW en boucle ferme. Tracer la fonction de transfert en boucle ferme dans le lieu de Bode. 3. Peut-on rgler K afin de diminuer le facteur de surtension pour obtenir MWdb=10dB ?
Justifier votre rponse laide de labaque de Black puis par un calcul direct.
Pour cela, exprimer la fonction de transfert en boucle ferme E(p)S(p)W(p) = sous la forme :
2
W0W0
W
W
wpp
wz.2
1
K)p(W
++
=
Et donner les expressions de zW, KW et w0W. En dduire wRW et MW. Comparer avec les rsultats obtenus laide de labaque de Black.
Exercice n9 : On considre un systme du second ordre ayant comme fonction de transfert :
2p.10p.523)p(H ++= .
1. Dduire z ; K et w0. 2. Tracer la rponse indicielle. 3. Tracer la rponse du systme dans le lieu de Bode, le lieu de Nyquist et le lieu de
Black. Corrig exercice n9 :
1. K = 1,5. z = 0,56. w0 = 0,447. 2. Rponse indicielle
( )k12,2exp.100Dk% = . %12D1 = , %44,1D2 = .
7,2..kTpic = . s5,8Tp1 = , s17Tp2 = .
s17Ta = . s12Tr5% = , . s16Tr2% =
Cours dautomatique et rgulation 54
Chapitre 4 Etude des systmes lmentaires
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
System: sys Time (sec): 8.5 Amplitude: 1.68
System: sys Time (sec): 12 Amplitude: 1.57
System: sys Time (sec): 17 Amplitude: 1.48
Step Response
Time (sec)
Ampl
itude
3. Etude Harmonique. Lieu de Bode
-60
-40
-20
0
20
Mag
nitu
de (d
B)
10-2
10-1
100
101
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Cours dautomatique et rgulation 55
Chapitre 4 Etude des systmes lmentaires
Lieu de Nyquist
-1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Lieu de Black
-180 -135 -90 -45 0-60
-50
-40
-30
-20
-10
0
10Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)
Cours dautomatique et rgulation 56
Performances des systmesasservis linaires
Cours dautomatique et rgulation 57
Chapitre 5
Chapitre 5 Performances des systmes asservis linaires
Chapitre 5 : Performances des systmes linaires asservis
1. Introduction On sintresse ltude des systmes asservis retour unitaire, puisque tout systme pouvant tre transform en systme retour unitaire.
T(p) S(p) (p) + _ E(p)
)p(T : Fonction de transfert en boucle ouverte.
( )( )pT1
pT)p(F += : fonction de transfert en boucle ferme.
( ) ( )( )pDpN
pa...papaapb...pbpbb
pF nn210
mm
2210 =++++
++++= , o n m. Analyser le systme asservi linaire revient tudier la fonction de transfert en boucle ouverte ( )p(T1 + ). Ltude des performances consiste tudier :
La stabilit et la rapidit qui sont deux critres dynamiques. La prcision qui est un critre statique.
( ) n22210 pa...papaapD +++= : sappelle quation caractristique. Les racines de N(p) sappellent les zros de F(p). Les racines de D(p) sappellent les ples de F(p).
2. Stabilit 2.1. Dfinition
Un systme initialement au repos est stable si pour une entre impulsion de Dirac, le systme rejoint une position dquilibre aprs un certain temps.
2.2. Condition de stabilit Ltude de la stabilit revient rsoudre lquation caractristique D(p)=0. Soit : iii jp = une racine de D(p). La condition ncessaire et suffisante pour que le systme soit stable est : toutes les racines de D(p) sont partie relle strictement ngative. i
Remarque Cette condition ncessaire est suffisante exige un calcul des racines ce qui rend cette
condition inexploitable lorsque lordre du systme devient important, pour cela on propose le critre algbrique suivant.
Cours dautomatique et rgulation 58
Chapitre 5 Performances des systmes asservis linaires
2.2.1. Critre de Routh Pour cette section, l'approche est purement algbrique et ne requiert pas de reprsentation graphique. Le polynme dnominateur du systme en boucle ferme est crit sous sa forme dveloppe et on utilise les proprits des polynmes pour tirer des conclusions concernant les racines, mais sans les calculer explicitement. Les racines de ce polynme sont les ples du systme :
011n
1nn
n apa...papa)p(D +++= On construit d'abord un tableau de n lignes et (n+1)/2 colonnes, arrondi l'entier suprieur. Les lments des deux premires lignes sont les coefficients du polynme D(p). Pour le reste du tableau, on dfinit le terme de la ligne i et la colonne j.
1,1i
1j,1i1,2i1j,2i1,1ij,i A
A.AA.AA
++ =
pn an an-2 an-4 a0 pn-1 an-1 an-3 an-5 pn-2 b1 b2 b3 pn-3 c1 c2 p1 y1 y0 p0 z0
1n
3nn2n1n1 a
a.aa.ab
= ; 1n
5nn4n1n2 a
a.aa.ab
=
1
1n23n11 b
a.ba.bc = ; 1
1n35n12 b
a.ba.bc =
La condition ncessaire est suffisante de stabilit sexprime par un tableau de Routh par : Tous les ai doivent tre prsents et sont strictement positifs. Tous les coefficients de la premire colonne du tableau doivent tre strictement
positifs.
Remarques Si un seul coefficient est nul alors le systme est dit marginalement instable. Le nombre de changement de signe dans la premire colonne du tableau est gal au
nombre de ples partie relle positive.
2.2.2. Applications
1/ ( ) 3p.3p.4p.3ppD 234 ++++=Etudier la stabilit de ce systme.
p4 1 4 3 p3 3 3 0 p2 3 3 0 p1 0 > 0 0 p0 3
Cours dautomatique et rgulation 59
Chapitre 5 Performances des systmes asservis linaires
33
312b1 == ; 3309b2 == ; 0b3 = .
Le coefficient de la deuxime colonne, quatrime ligne est nul donc le systme est marginalement instable. Do on peut crire le polynme auxiliaire.
3.p2 + 3 = 0 p = j .
2/ D(p) = p3+a.p2 +b.p+c. Etudier la stabilit de ce systme en fonction de a, b, et c.
p3 1 b
p2 a c
p1 a
cab 0 p0 c
Condition de stabilit a, b, c >0 et ab>c.
3/ Soit)3p)(1p(p
K)p(T ++= . tudier la stabilit de ce systme en boucle ferme en fonction de K.
)(pD = p3+4.p2+3.p +K
p3 1 3 p2 4 k
p1 4
K12 0
p0 K K > 0 0
4K12 > K
Chapitre 5 Performances des systmes asservis linaires
Enonc : Le critre de Nyquist simplifi ou critre du Rivers s'nonce ainsi: Si, en parcourant la courbe de rponse harmonique en boucle ouverte )j(T dans les sens des pulsations croissantes, on laisse le point "1" gauche, le systme en boucle ferme est stable.
( )jwG0
mA
1
m ( )1w
w1
-1
2
3
1
w
w
w
Re
1 Systme stable
2 Systme en limite de stabilit
3 Systme instable
On est souvent intress une rponse plus nuance que stable ou instable. Les notions de marge de gain Am ou de phase m permettent d'apporter cette nuance.
2.3.2. Marge de gain La marge de gain permet d'indiquer la qualit de la stabilit en exprimant la distance sur l'axe rel par rapport au point critique "1". L'intersection de la rponse harmonique avec l'axe rel a lieu pour une pulsation note w, car la phase pour cette pulsation vaut .
)jw(T1Am
= avec =))jw(Targ(
2.3.3. Marge de phase La marge de phase permet d'indiquer la qualit de la stabilit en exprimant la distance angulaire par rapport au point critique "1". L'intersection de la rponse harmonique avec le cercle unit a lieu pour une pulsation note w1, car le module pour cette pulsation vaut "1".
+= ))jw(Targ( 1m avec 1)jw(T 1 =
Cours dautomatique et rgulation 61
Chapitre 5 Performances des systmes asservis linaires
Cours dautomatique et rgulation 62
2.4. Critre de Black 2.4.1. Critre de Black
Le critre du Rivers peut aussi tre exprim dans le plan de BLACK. Ici le point "1" devient le point (0 dB; 180). Pour pouvoir appliquer le critre, les conditions sont les mmes que pour le critre de Nyquist : le systme en boucle ouverte ne doit compter aucun ple partie relle positive.
nonc : Un systme linaire F(p) en boucle ferme est stable si, en parcourant le lieu de BLACK de sa rponse harmonique en boucle ouverte dans le sens des pulsations croissantes, on laisse le point critique (0 dB; 180) droite.
Sur la figure prcdente, les marges de phase et de gain peuvent tre lues directement sur les deux axes. La pulsation est celle qui dtermine le point de la rponse harmonique l'intersection avec l'axe horizontal 0[dB]. La pulsation est celle qui dtermine le point de la rponse harmonique l'intersection avec l'axe vertical 180 et
avec l'axe vertical 135.
1w
w
cw
2 3 1
cw
1w
w Am
m
1 Systme stable
2 Systme en limite de stabilit
3 Systme instable
-135
Chapitre 5 Performances des systmes asservis linaires
2.4.2. Abaque de BlackNichols L'abaque de BlackNichols est form d'un systme de coordonnes curvilignes, superpos au plan de BLACK, sur lesquelles on peut directement lire les valeurs de module et d'argument du systme en boucle ferme . Pour appliquer l'abaque, le systme boucl doit tre retour unitaire.
)jw(F
On procde de la manire suivante: On trace le lieu de BLACK de la rponse harmonique en boucle ouverte )jw(T d'aprs
le systme de coordonnes rectilignes. Par exemple, pour la pulsation wx, on a calcul module et argument : [ ]dB2)jw(T x = et 0 . x 125))jw(Targ( =
On peut alors lire sur la mme courbe pour une valeur de pulsation donne les valeurs de module et d'argument du systme en boucle ferme )jw(F sur les coordonnes curvilignes. Pour cette mme pulsation, et le mme point, on lit en coordonne curviligne : [ ]dB1)jw(F x et 0 . x 50))jw(Farg( =
La pulsation de rsonance est dtermine pour le point o le module de la rponse harmonique en boucle ouverte a la valeur la plus leve (ici ~1,3 [dB]). On peut encore dterminer la pulsation , au-del de laquelle le module de la rponse harmonique en boucle ferme est toujours plus fa








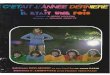





![ARCHIVÉ - PDF, 337.83[ARCHIVÉ - PDF, 337.83 kb ]](https://img.pdfslide.fr/doc/110x75/588428861a28abf4188bf543/archive-pdf-33783archive-pdf-33783-kb-.jpg)

![Pdf pdf projet_educatif-2[1]](https://img.pdfslide.fr/doc/110x75/5499da0bac7959092e8b5a10/pdf-pdf-projeteducatif-21.jpg)