-
8/12/2019 Design Trans
1/51
2/6/2002 2000 Alexander Slocum5-1
Topic 5Power Transmission Elements I
Topics : Transmissions Pulleys Belts & Cables
Winches Wheels Cams Shafts Couplings Robust Design Reminder
F
W
-
8/12/2019 Design Trans
2/51
2/6/2002 2000 Alexander Slocum5-2
Transmissions
A transmission transmits power from a motor (input) to an
actuator (output)that does useful work Often the transmission
transducts the power:
A high speed low torque motor (voltage is cheap, current is
expensive) is theinput
A low speed high torque output is desired (e.g., for a
winch)
Transmission design parameters: Motion profile
Optimal transmission ratio
Velocity check
Efficiency: Sliding contact systems (screws, sliding bearings) =
0.3 Rolling contact systems (gears, ball bearings, hard wheels)
= 0.95
-
8/12/2019 Design Trans
3/51
2/6/2002 2000 Alexander Slocum5-3
Transmissions: Motion Profiles
Given it is desired to move a specified load a specified
distance in a giventime:
Assume a parabolic profile is 100% efficient Triangular profile
is the fastest, but only 75% efficient A trapezoidal profile with
equal acceleration, slew (constant speed), and
deceleration times is 89% efficient Given the distance D that
the load is required to move
Time
V e l o c
i t y
t a t dt c
D = amax2
tc3
2 + amtc
3 2tc
3 + amax
2 tc
3
2
amax = 9D2t c
2 , maximum acceleration (m/s 2 or rad/ s 2)
vmax = 3D2tc
, maximum velocity (m/s or rad/s)
-
8/12/2019 Design Trans
4/51
2/6/2002 2000 Alexander Slocum5-4
Transmissions: Lightly Loaded Systems
There is an optimal transmission ratio which maximizes system
efficiency For low frictional and cutting forces, the matched
inertia doctrine can be used
to find the "optimal" transmission ratio First, the mass (kg) or
inertia (kg-m2) of the load and drive train components must
be known
Assume the power leaving the motor arrives at the load, and
power equals the
product of torque and angular speed:
Torque also equals the product of inertia and angular
acceleration, thus:
The transmission ratio n relates the motor and load velocities
by wmotor = nwload Differentiating this relation once with respect
to time, and substituting above:
motor load motor load = motor motor motor load load load J J
=
2 2 2 _ motor transmission ratio load load load J n J =
-
8/12/2019 Design Trans
5/51
2/6/2002 2000 Alexander Slocum5-5
Transmissions: Optimal Transmission Ratios
The "optimal" transmission ratio for a pure rotational motion
system dominated byinertial loads is:
For a friction or belt drive system, the optimal drive wheel
radius r is:
The optimal transmission ratio to be placed between a motor and
a wheel or pulley isfound by assuming the load inertia is:
For a leadscrew driven carriage, the optimal lead is:
It is a good idea to use metric (SI) units (mks)!
_ load
optimal ratiomotor
J n
J =
motor roller
load
J r
m=
2load roller transmissionroller load m J J J r = + +
2 motor load
J m
=
-
8/12/2019 Design Trans
6/51
2/6/2002 2000 Alexander Slocum5-6
Transmissions: Heavily Loaded Systems
Thermal power generated by the motor is to be minimized During a
trapezoidal move, total time t c, with a constant applied external
load, the motor
thermal power is:
The thermal power can be minimized with respect to the
transmission ratio n from
If the load is moving linearly, J load is the mass (kg), load is
the force (Newtons), load isthe maximum load speed (m/s) at the
maximum force level Varying load profiles can also be modeled to
find an overall optimal transmisssion ratio
for a system with complex loading patterns
Wthermal =cRmotor load2 J load2
Kt2 t c
n 2 JmotorJload
+ 1n2
2 + r
n2
c = tcta
+ tc td
r = load2 tc2
cload2 J load2
( )2/thermal W n nopt = Jload 1 + rJmotor = Jload
Jmotor @ r = 0
-
8/12/2019 Design Trans
7/51
2/6/2002 2000 Alexander Slocum5-7
Transmissions: Velocity Check
One must also check the required velocity and torque of the
motor For rotational systems the motor speed in rpm is:
For linear friction (capstan) or belt drives with a linear
carriage velocity inm/s, the motor speed in rpm is:
For leadscrew drives with lead and a linear carriage velocity V,
the motorspeed in rpm is:
When the load inertia is very large, the transmission ratio is
often very large
Select the largest ratio possible that results in a reasonable
motor speed
motor optimal load n =
30 load motor
roller
V
r
=
60 load motor
V
=
-
8/12/2019 Design Trans
8/51
2/6/2002 2000 Alexander Slocum5-8
Pulleys
Pulleys (Sheaves) are a most fundamental power transmission
element Mechanical advantage Capstans
Efficiency
Tracking
Mounting
F
W
-
8/12/2019 Design Trans
9/51
2/6/2002 2000 Alexander Slocum5-9
Pulleys: Mechanical Advantage For multiple strand sheave system
(like seen on large cranes),
Work in = efficiency*Work out!
Atwoods machines: 2 cables, F=W/2:
Look at cranes! What do all the pulleys (sheaves) and cables
do?
F
W
_ _ _
_ _ _
out number of cable strandsin
inout
number of cable strands
F N F
V V
N
=
=
-
8/12/2019 Design Trans
10/51
2/6/2002 2000 Alexander Slocum5-10
Pulleys: Capstans
A capstan is typically a fixed, or controlled rotation,
body-of-revolution whicha cable wraps around A Capstan can also
form the basis for a band brake, where a band is anchored to a
structure, and then wraps around a shaft
A cable wrapped around a capstan by radians with coefficient of
friction mand being held with a force F hold , can resist the pull
of a cable with many times
higher force F pull
hold pull e F F =
CapstanEnter numbers in BOLD
Angle of wrap (degrees, radians) 720 6.2832Coefficient of
friction 0.2Holding force Fhold 1Pulling force that can be resisted
Fpull 3.52
Hold
Pull
-
8/12/2019 Design Trans
11/51
2/6/2002 2000 Alexander Slocum5-11
Pulleys: Efficiency
If a belt or cable runs around a fixed shaft, then there is a
lot of friction between the beltand the shaft, and the efficiency
is low:
If the belt or cable rides on a pulley of diameter D with inside
sliding-contact-bearing-on-shaft diameter d, then the efficiency is
high:
For D = 20 mm, d = 3 mm, and = 0.1, F out/F in = 97%, vs. 85% in
above example!
Cable pulling around a shaftEnter numbers in BOLDAngle of wrap
(degrees, radians) 180 1.5708Coefficient of friction 0.1Pulling
force 10
Net force out 8.55Efficiency 85%
( ) ( )( ) _
2 2 2
out in friction losses
out in out in
out in
work work work
d D D F F F F
D d F F
D d
= = +
= +
-
8/12/2019 Design Trans
12/51
2/6/2002 2000 Alexander Slocum5-12
Pulleys: Tracking
Pulleys can be grooved to provide a guide for a cable Two
pulleys axes of rotation can never be perfectly parallel, so a flat
belt will
want to drift off (tracking) Pulleys must be crowned (round
profile) to keep a belt from walking off
The crown forces the belt material on either side to want to
climb towards themiddle.
The crown need not be accurate, and it is easily created on the
lathe
Neither side can win, so the system is stable
On a concave surface, the side with more belt in contact will
cause the belt to driftfurther to that side until it falls off
A flat pulley is at best neutrally stable Great, OK, bad, &
horrid pulleys:
-
8/12/2019 Design Trans
13/51
2/6/2002 2000 Alexander Slocum5-13
Pulleys: Mounting
The bore and the faces of a plastic pulley act as their own
radial and thrustsliding contact bearings
Minimize axle diameter to minimize friction, but beware of
bending the shaft! Do the bending stress calculations!
For a simply supported pin of length L, the maximum moment is
FL/4
Beware of deflections:
Can bending induced slope cause the belt to track off the pulley
despite thecrown?
-
8/12/2019 Design Trans
14/51
2/6/2002 2000 Alexander Slocum5-14
Belts & Cables
Engineering of Belts & Cables Linear motion Crawler
tracks
Rotary motion
Winches
Pulley center distance
Stresses around a pulley Tensioning Manufacturing
-
8/12/2019 Design Trans
15/51
2/6/2002 2000 Alexander Slocum5-15
Belts & Cables: Linear Motion
Belts & Cables are a very effective way to convert rotary to
linear motion
The force F in a belt with tension T on a pulley of diameter D
that can begenerated by the torque can be conservatively estimated
by:
F = 2 /D for toothed belts F = T D/2 for flat belts
A more exact model would consider the capstan effect
The speed is simply V linear =2 motor *D
Belts run on pulleys For flat belts, the pulleys must be crowned
to prevent the belt from coming off the
pulley due to pulley misalignment Timing belt pulleys must also
be carefully aligned to prevent premature failure
load
-
8/12/2019 Design Trans
16/51
2/6/2002 2000 Alexander Slocum5-16
Belts & Cables: Linear Motion
Cable (String) drives are often used on steering systems on
outboard motorboats Foot powered lathes also used this
principle!
Detailed design issues: Conservatively, the cable needs to be
held in tension equal to the desired force divided by the
coefficient of friction EVOLUTION: One can also anchor one end
of the string to one sideof the drum, and
anchor the other end of another string to the other side of the
drum, and create a windin/wind out winch with incredible force
capability!
The drum needs to be long enough so as the string winds, it has
enough room to translateaccording to the helix angle
If the total travel distance is L (+/- L/2), and the drum
diameter is D, then there must beSafetyFactor* LD (where SF is
typically 1.2)
Otherwise there is slip caused by stretched belt accumulating on
the drum and then beinglet off the other side
This is only important if linear position is to be determined
with a rotary encoder on thedrum
-
8/12/2019 Design Trans
17/51
2/6/2002 2000 Alexander Slocum5-17
Belts & Cables: Linear Motion Consider the early years of
industry:
Basic physics still existed, even if people did not know it!
People powered tools gave rise to craftsmanship and a feel for
machines and
materials which in turn gave birth to the industrial
revolution
2.007 machines provide the same critical get to know your
physics and materialsexperience
Ken Stone, Director of the MIT Hobby Shop,and his string-powered
latheweb.mit.edu/hobbyshop
-
8/12/2019 Design Trans
18/51
2/6/2002 2000 Alexander Slocum5-18
Belts & Cables: Linear Motion Cable drives can be
cascaded:
Can you change the design so that you are sure of the order of
extension?(hint, anchor one stage at a time, use one to pull
anotherteamwork!) Industrial lift systems often use this type of
system to raise telescoping sections
h t t p : / / w w w . g e ni e l i f t . c om / ml - s e r i e s
/ ml -1 - 5 .h t ml
-
8/12/2019 Design Trans
19/51
2/6/2002 2000 Alexander Slocum5-19
Belts & Cables: Crawler Tracks (Treads)
Treads only help when there is loose media or a surface into
which they can dig Treads DO NOT help on smooth surfaces
Smooth surfaces often are covered with a dust layer, and
sharp-groove treads can help
Treads can be created by cutting angled slices from a rubber
strip, and gluingthem onto the belt surface
-
8/12/2019 Design Trans
20/51
2/6/2002 2000 Alexander Slocum5-20
Belts & Cables: Rotary Motion
Synchronus Drives (timing or gear belts) can transmit torque
between shaftsand also achieve a transmission ratio They combine
the positive timing action of gears with the flexibility, speed and
low
noise level of belts
For an in-depth discusssion on synchronus drive design, see
Stock Drive Productson-line tech library:
http://www.sdp-si.com/Sdptech_lib.htm
Flat belts require higher tension to transmit torque
Conservatively, the belt needs to be held in tension equal to the
desired torque
divided by the coefficient of friction and the small pinion
radius
Vee-belts use the the principle of self help : Increased tension
caused by power being transmitted, wedges the belt in a
Vee-shaped pulley groove, so it can transmit more torque
http://www.emerson-ept.com/bnames/browning/Browning.htm
-
8/12/2019 Design Trans
21/51
2/6/2002 2000 Alexander Slocum5-21
Belts & Cables: Rotary Motion
Cables can be used to couple a small motor output shaft to a
large diameterwheel The capstan effect becomes an important design
parameter
Roto-Lok drive from Sagebrush Technology Inc.
http://www.sdp-si.com/Sdptech_lib.htm
-
8/12/2019 Design Trans
22/51
2/6/2002 2000 Alexander Slocum5-22
Belts & Cables: Pulley Center Distance
The equations for pulley center distanceas a function of pulley
pitch radius and
belt length are non-linear It is best to use a spreadsheet
pulleycenterdistance.xls
A
CR 2R
1
Pulley Center Distance Calculation
Belt pitch, P 0.25 Number of teeth, N 50Start with a guess for
C, and then use Goal Seek Center distance, C 3.861417Large pulley
pitch radius, R2 1Small pulley pitch radius, R1 0.5
Length of belt, L 12.5Tangent segment, A 3.828908
gamma, g 0.129851Phi, f 1.440946Theta, t 1.700647error
-5.6E-05
-
8/12/2019 Design Trans
23/51
2/6/2002 2000 Alexander Slocum5-23
Belts & Cables: Stress Around a Pulley
Before any belt or cable system can be conceived, the stresses
in the belt orcable as it passes around a round object need to be
considered The need for a reasonable diameter, can have a huge
effect on the space required
for the design
A cable or belt bending around a sheave (pulley) undergoes
stress For a wire rope, the ratio of pulley diameter to cable
diameter depends on
the number of strands. In general the ratio should be > 30:1.
50:1 is ideal. For string and hemp rope, 10:1 is minimum. Use
larger ratio for greater
life.
For a flat belt, thickness t, modulus E, Poisson ration , on a
pulley ofdiameter D, the strain is all in a plane (the cross
section remains rectangular) :
D
Et
=
2
1
-
8/12/2019 Design Trans
24/51
2/6/2002 2000 Alexander Slocum5-24
Belts & Cables: Tensioning Tension can be maintained by:
Stretching the belt by displacing one of the pulleys Use a
spring-loaded idler pulley (which also should be crowned)
The tension T is approximately a function of the belt
free-length L, belt lateraldeflection , and spring force F:
T = FL/2 One pulley is made moveable:
The bracket that holds the pulley axle has slots for the
attachment bolts, and it ismoved and locked down
A screw is used to pull on a yoke that holds the pulley axle The
latter two methods require tension adjustment as the belt stretches
MAKE SURE TO ALWAYS REMOVE THE TENSION EVERY NIGHT.
DO NOT LEAVE THE BELTS ON YOUR MACHINE TENSIONED, AS THEYCAN
CREEP
Real industrial belts do not have this problem
-
8/12/2019 Design Trans
25/51
2/6/2002 2000 Alexander Slocum 5-25
Belts & Cables: Manufacturing
Ideally, a belt is continuous For robotics contests:
Rubber sheet or O-Ring cord can be cut into strips
Overlap the rubber and cut through both layers with a knife
Butt-joint together the ends with Superglue
Nylon string can be cut to length
Tied (if the system can take the bump of the knot) Spliced by
holding both ends to a soldering iron and then jamming them
together
-
8/12/2019 Design Trans
26/51
2/6/2002 2000 Alexander Slocum 5-26
Winches A winch is a motorized drum that controls cable tension
(to take in or let out) and
position, see winchcable.xls A single wrap of cable on the drum
requires a longer drum
Effective drum diameter and winch force capability remain
constant Multiple wraps of cable on the drum allow for more cable
in a smaller place
Drum diameter and winch force capability vary
A fairleader is a device to control the input/output of the
cable so it winds on the drum in anorderly fashion
The simplest design just uses smooth rounded static features
Vertical and horizontal roller designs reduce cable wear A powered
fairleader moves back and forth ensuring that the cable winds in an
orderly
fashion without randomly overlapping itself Not often used, as
usually the tensioned cable causes it to wind properly
WinchCable.xlsMotor Torque (N-m) 0.4Drum Diameter (mm) 40
Drum Length (mm) 30cable diameter (mm) 1.5wrap number mm of
cable/wrap Total length Maximum cable force
1 2513 2513 202 2702 5215 193 2890 8105 174 3079 11184 16
-
8/12/2019 Design Trans
27/51
2/6/2002 2000 Alexander Slocum 5-27
Winches: Raising Booms Winches are often used used to raise a
crane boom: WinchBoom.xls
aa
B
bb
Extended: PeRetracted: Pc
aaa
bbb
A
L Fmax
WinchBoom.xlsMotor no load speed, Wm [RPM]: 47 Wn [rad/s]
4.9Motor Stall Torque, Ts, [Nm]: 3.02Drum radius r [inches]: 0.5 r
[m] 0.0127Length of boom La [inches]: 12.5 La [m]: 0.3175Angle of
boom (degrees) 45Vertical load at tip of arm [N]: 6Length of cable
connection along boom, Lw [inches]: 4 Lw [m]: 0.1016Vertical
distance above boom pivot point of cable (inches) 1 Lc [m)
0.0254Boom moment [N-m] 1.347
Cable vectors: I jR 0 0.0254
unit vector F -0.8398 0 .5429RxF 0.0213
Cable Tension (N) 63Torque needed by motor [Nm]: 0.802Speed of
Motor lifting arm, Wl [rad/s]: 3.6 Wl [RPM] 0.379Linear speed at
tip [m/s] 1.1
-
8/12/2019 Design Trans
28/51
2/6/2002 2000 Alexander Slocum 5-28
Winches: Design Issues
Winch design: The drum must be supported by its own bearings
Torque from the motor is to be supplied via a flexible coupling or
universal joint,
or a well-aligned spline
Long drums need bearingsupport at both ends, usea coupling
between motorand drum, fairleader may
be needed to ensure cablewinds properly
Drum lengthFairleader
Even cable winding
Beware of increasingeffective diameter oncable force
Drum diameter,length
Large cable capacity
Small diameter needed tominimize motor torque
Motor torqueDrum diameter
High cable force,speed
PhysicsDPFR
-
8/12/2019 Design Trans
29/51
2/6/2002 2000 Alexander Slocum 5-29
Wheels
System properties Traction & Controllability Overcoming
obstacles Manufacturing
Mounting
-
8/12/2019 Design Trans
30/51
2/6/2002 2000 Alexander Slocum 5-30
Wheels: System Properties
Bolt to flangeFlangeEasy attachment, torquetransmission
Plastic is slippery. Add rough ortacky material
Wheel surface material, normalload
Traction
One motor revolution will causeless travel
Diameter-make it smallControllability
When the motor is not torquelimited, increase diameter
Diameter-make it largeClimbing over obstacles
If motor is not torque limited,and you want speed, increase
diameter
Diameter-make it largeHigh speed
PhysicsDPFR
-
8/12/2019 Design Trans
31/51
2/6/2002 2000 Alexander Slocum 5-31
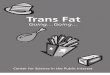
Wheels: Traction & Controllability
Two-Wheel Drive vehicles are simple to build, and for zipping
around, theywork fine In a pushing contest with a 4-Wheel Drive or
a Tracked vehicle, they lose
Remember, motor torque is NOT infinite!
The smaller the wheel:
The greater the traction force the motors can cause The slower
the vehicle per unit thumb input to the controller!
The slower the vehicle, the more controllable the vehicle
Some past robot contests feature big wheeled vehicles
careeningaround
Torque-Speed for Bosch Motor (MS-L 2/98 )
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.61.8
0 10 20 30 40 50 60 70 80 90 100
Speed (RPM)
T o r q u e
( N m
)
-
8/12/2019 Design Trans
32/51
2/6/2002 2000 Alexander Slocum 5-32
Wheels: Torque and Contact Pressure
The smaller the wheel diameter, the less the torque to turn the
shaft Ideally, the wheel just slips when maximum torque is
applied
This keeps you from stalling the motor and potentially burning
it out
The smaller the diameter, the higher the contact pressure, and
the greater thewear Use Hertz Contact Stress Theory to determine if
the wheels are too
heavily loaded!
Turning Torque = F*(2R)
2R R
Turning Torque = F*(R)
FF
Surface pressure:F/(2R*Length)
2R R
FF
Surface pressure:F/(R*Length)
-
8/12/2019 Design Trans
33/51
2/6/2002 2000 Alexander Slocum 5-33
Wheels: Traction Drives
Wheels can also be used to drive components Also known as
friction drives
A traction drive is used to control the paper motion in an
inkjet printer Micro roughness on the wheels imprint their own gear
rack into the paper
Coordinate Measuring Machines (CMMs, which account for 10% of
allmachine tool sales) often use friction drives
If a person gets in the way, they will slip before crushing The
primary design challenge is that the preload force must be equal to
the
desired drive force/coefficient of friction!
-
8/12/2019 Design Trans
34/51
2/6/2002 2000 Alexander Slocum 5-34
Wheels: Overcoming Obstacles
How big must a wheel be to make sure it can overcome
obstacles?
( ) 20 2 M d M F h dh h F = = 2
2
M dh h F F d h
-
8/12/2019 Design Trans
35/51
2/6/2002 2000 Alexander Slocum 5-35
Wheels: Manufacturing
Wheels can be made from any material, or by trimming the plastic
wheels provided
Modifying the wheel diameter
Cut the spokes on the bandsaw
Use a fixture for wheel diameter modification:
Mount the wheel in the fixture and turn the spoke stubs off to
create asmooth round wheel
Attaching the wheel to a shaft If the wheel is to be driven by a
motor, it must be securely attached to the shaft
A press-fit for plastic wheels is not reliable
An adhesive bond can work if extreme cleanliness is observed
The best method is to use a positive mechanical feature Square
the end of the shaft and fit it into:
A broached square hole The molded plastic square-hole-hub
-
8/12/2019 Design Trans
36/51
2/6/2002 2000 Alexander Slocum 5-36
Wheels: Mounting
Your kit contains a molded plastic part that forms an interface
between awheel and the square shaft that fits through the Bosch
motor gearbox
Thanks to Dean Kaman, and his company DEKA, for specially making
these parts for us!
The wheel-on-shaft subassembly should overhang the gearbox as
little as possible!
DO NOT drill a hole in the square shaft for a pin on the loaded
side of theshaft!
Did you know that a square shaft can be threaded! A round shafts
ends can be machined square to fit into a square-broached hole
Beware of system deformations and the fact that they can take up
all the
clearance in a system and cause it to bind!
-
8/12/2019 Design Trans
37/51
2/6/2002 2000 Alexander Slocum 5-37
Cams A cam is a rotating shape whose angular motion is converted
into output
motion by means of a cam follower which rides on the cam surface
Rolling elements provide the highest degree of efficiency, but they
take up more
space
Sliding elements are very compact, and can be efficient of the
speed is high enoughto maintain oil film lubrication
A cam follower is a rolling or sliding contact machine element
that follows thecontour of a surface and transmits the motion to a
mechanism
A cam profile can be designed to create corresponding
acceleration, velocityand dwell profiles in a mechanism (e.g., an
engine valve)
Stanley Tool Works YANKEE screwdriver
-
8/12/2019 Design Trans
38/51
2/6/2002 2000 Alexander Slocum 5-38
Shafts
Shafts transmit rotary and linear power via motors, leadscrews,
pistons Shafts are one of the most common machine elements
The primary design issues are: Shaft support
Component mounting
Bending & Stresses
Buckling Stability
BallscrewSupport BearingsBearing Housing Ballnut
Carriage
AC Brushless Motor
Rotary Encoder
Flexible Coupling
Shafts
-
8/12/2019 Design Trans
39/51
2/6/2002 2000 Alexander Slocum 5-39
Shafts: Axial Loading
Leadscrews are shafts that are axially loaded For heavy shock
loads, stress concentration factor increases by a factor of 2
See R.E. Peterson, Stress Concentration Factors, 1974, John
Wiley & Sons, New York
Stress concentration factor Stress
D dr
Dd
DCorner r Width bDepth t
r
Shaft loaded byaxial force F
2
4 F
d
=
0.36 0.2( / )( / )1
5 0.12/( / 1)
D d
t r d
K D d
= + +
( )0.2751 0.65/ /t d D K +20.25 F
dD D
24 F
d
=
20.25 F
bt D
1.5t K
B=D/4, t=D/8
0.511 0.34( /( 2 ) 1)
0.42( / )1
3 0.507/ ( / 2 1)
d d r
t r d K d d r
= + + D r d
-
8/12/2019 Design Trans
40/51
2/6/2002 2000 Alexander Slocum 5-40
Shafts: Torsional Loading
Motors and gears torque shafts For heavy shock loads, stress
concentration factor increases by a factor of 2
Stress concentration factor StressShaft loaded byTorque
D dr
Dd
Dr
DCorner r Width bDepth t
r
3
16
d
=
0.3 0.2( / )( / )113 0.3/ ( / 1)
D d
t r d
K D d
= ++
3 2/16 / 6d d D
= ( )
0.1971 1.47 /t d D K
= +
316
d
=0.609 0.146( /( 2 ) 1)
0.252( / )1
5 3.73/ ( /( 2 ) 1)
d d r
t r d K d d r
= + + 1.5t K
3
16
D
= B=D/4, t=D/8
d
-
8/12/2019 Design Trans
41/51
2/6/2002 2000 Alexander Slocum 5-41
Shafts: Bending
Radial loads (tangential and separation forces) from gears bend
shafts For heavy shock loads, stress concentration factor increases
by a factor of 2
Stress concentration factor StressShaft loaded byBending moment
M
D dr
Dd
DCorner r Width bDepth t
r
3
32 M
d
=
3 2/32 / 6d d D
=
332 M
d
=
3
32 M
D
=
0.66( / )111.14
t r d
K
= +B=D/4, t=D/8
0.59 0.184( /( 2 ) 1)
( / )15 0.081/( /( 2 ) 1)
d d r
t r d K d d r
= + +
0.73 0.42( / 1)
0.16( / )1
5 4.38/ ( / 1)
D d
t r d
K D d
= ++
( )0.2751 0.65/ /t d D K +
Dr, d
-
8/12/2019 Design Trans
42/51
2/6/2002 2000 Alexander Slocum 5-42
Shafts: Shaft Support
Abbe and Saint-Venants Principles and Exact Constraint Design
must becarefully considered when designing the mounting of
shafts
The system must be designed to accommodate misalignment between
bearingsor shafts Allow for clearance between bearing and shaft to
accommodate misalignment
Use flexible couplings or self-aligning (spherical) bearings
Use designs that automatically accommodate misalignment
Line-bore holes at the same time through mounting plates
OUCH!
EEOW!
Perpendicularity Horizontal Parallelism Vertical Parallelism
-
8/12/2019 Design Trans
43/51
2/6/2002 2000 Alexander Slocum 5-43
Shafts: Component Attachment The primary functional requirements
for attaching a component to a shaft (in
order of goodness) are: Prevent the component from slipping
Spline: Excellent torque transmission, but can be expensive
Circumferential clamp: Very good torque transmission, low
stress
concentration, modest price Keyway: Very good torque
transmission, modest stress concentration, low
cost
Pinned shaft: Good torque transmission, modest stress
concentration, low cost Setscrew: Your worst nightmare!
Minimize stress concentration Raised diameter with radiused
corner
Requires a lot of material to be removed from a long shaft
Rarely required in 2.007 machines where shaft size is large
compared to motor
size
-
8/12/2019 Design Trans
44/51
2/6/2002 2000 Alexander Slocum 5-44
Shafts: Thrust Shoulders Shafts often need a shoulder for a
thrust bearing
A radiused transition between a small and a large diameter
minimizes the stressconcentration
The radius will interfere with the edge of the thrust
bearing
An undercut is thus often used
The net strength, Ip/Kt, is maintained
From shaft_torsion.xls :
=>+
-
8/12/2019 Design Trans
45/51
2/6/2002 2000 Alexander Slocum 5-45
Shafts: Power Transmission
The higher the power, P (W), and the lower the speed, (rad/sec),
the higherthe shaft torque, (N-m):
Shafts see HUGE numbers of cycles, so design for fatigue is of
criticalimportance From shaft_torsion.xls :
P
=
-
8/12/2019 Design Trans
46/51
2/6/2002 2000 Alexander Slocum 5-46
Shafts: Bending & Stresses
All shafts are loaded, and will thus deform and be subject to
stress Bending, torsion, and shear stress for round shafts:
Bending: = Mc/I where I/c = D3/32 Torsion: = r/I where I/r = D3/16;
= L/GI where I = D4/32 Shear: = F/A where A = D2/4 Stress
Avoid fatigue and wear Avoid sharp transitions, even between
components mounted on the shaft and
the shaft itself NEVER put a pin through a shaft on the
load-side of the assembly
Deformations Minimize so as to not require inordinate bearing
clearances Minimize to prevent misalignment of components mounted
to the shaft (e.g.,
pulleys) Use simply supported instead of cantilevered designs
whenever possible
Wheel
Shaft
Sliding bearing in
structure!!Non Optimal!!Wheel
Shaft
Sliding bearing instructure
!!Optimal!!
-
8/12/2019 Design Trans
47/51
2/6/2002 2000 Alexander Slocum 5-47
Shafts: Stability
Rotate a shaft at its natural frequency and it will vibrate,
causing shaft whip Stable robust machines do NOT operate at the
natural frequency of their
components!
The increased stress can cause rapid failure
Load a long shaft with too high a load and it will buckle
It is straightforward to predict instability caused by shaft
whip or buckling : It is VERY difficult to achieve fixed-fixed
design
Remember Saint-Venant!
Use the ROOT diameter for leadscrew shaft calculations!
-
8/12/2019 Design Trans
48/51
2/6/2002 2000 Alexander Slocum 5-48
Couplings Do not overconstrain your system!
If you overconstrain the system, then: It will wear and bind and
fail! You will only harness a fraction of the potential power
(force)
A coupling is stiff in the required direction, yet allows for
motions along andabout other axes Essential to accommodate
misalignment between power transmission components
Couplings for linear motion systems Couplings for rotary motion
systems
Identifying the degrees of freedom on components is vital! Draw
the actuator output Draw the thing to be moved Attach the two with
a coupling element that is only stiff in the direction force is
to be transmitted!
Coupling materials in the kit: Plastic tube (between motor shaft
and driven shaft) Clevis (supplied or make your own)
Look at construction equipment:
-
8/12/2019 Design Trans
49/51
2/6/2002 2000 Alexander Slocum 5-49
Couplings: Linear Motion
Often a linear motion actuator and the carriage it is actuating
are not precisely aligned Example: A Piston must be clevis mounted
at each end with enough hole-pin clearance toaccommodate lateral
motions
The pin through a clevis should ideally be in shear
Super precision instruments may go to extreme measures to make
sure that the forcefrom the actuator is pure Wobble pins or wire
couplings are sometimes used:
If a machine element (ballnut) is located at the center of
stiffness, then error motions ofone machine element will not cause
pitch errors:
-
8/12/2019 Design Trans
50/51
2/6/2002 2000 Alexander Slocum 5-50
Couplings: Rotary Motion
To prevent over constraint from destroying bearings and
fatiguing shafts, use couplings In 2.007: Plastic tube pressed over
shafts with wire twisted about as a clamp Use clevis
connections
Oldham couplings and universal joints can be created
Helical couplings are ideal, and can be approximated by slits in
a shaft
Remember: Do shaft strength calculations if you drill through a
shaft to pin a coupling!
http://www.heli-cal.com/
http://www.sdp-si.com/Sdptech_lib.htm
-
8/12/2019 Design Trans
51/51
2/6/2002 2000 Alexander Slocum 5-51
Conclusion: Cables, Belts, & Wheels are SIMPLE
There are many different ways to achieve linear or rotary motion
Cable or belt systems are simple to design and manufacture, but
like all systems,
require careful attention to detail
Proper crowning of pulleys is the most often overlooked
detail
Wheels are simple to design and manufacture, but like all
systems, require carefulattention to detail
Couplings are critical elements to ensure that the
motor-to-transmission connectionis not over constrained