Embed Size (px)
Citation preview
ENERGETIQUE ET DYNAMIQUE Mécanique
DYNAMIQUE DU SOLIDE
Lycée Jean DYNAMIQUE DU
Référence au programme S.T.I Référence au module 4- Energétique et dynamique. 4-2 Dynamique du solide
Module 13: :Dynamique
1- Objectifs de la séquence : Déterminer les actions extérieures permettant d’obtenir une accélération spécifiée. 2- Situation pédagogique : prérequis
Modélisation des A.M Cinématique.
connaissances visées
Principe Fondamental de la dynamique..
nature de la démarche
Acquisition de connaissances.
à savoir Appliquer le principe Fondamental de la statique..
1 EXPERIENCE. Question a un euro !!!:
« Si je laisse tomber deux sphères identiques l’une epolystyrène, qu’elle est la sphère qui touche le sol en
Réponse : Elles arrivent quasiment en même temps…
JAURES ARGENTEUIL
S. PIGOT M_42-01.Doc (word7) DYNAMIQUE
realise par : Ayoub Hamssi lycéejaber ben hayen
SOLIDE
n acier et l’au premier ? »
Contenu d
tre
u d
en
ossier : 4 pages Version 02
2 SOLIDE EN MOUVEMENT DE TRANSLATION RECTILIGNE.
PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
Il se présente sous la forme de deux relations vectorielles pour un solide 1 de masse m et de centre de gravité G par rapport à un repère absolu 0.
=∑ 1/extF m. WC<
=∑1/, extFG
M e<
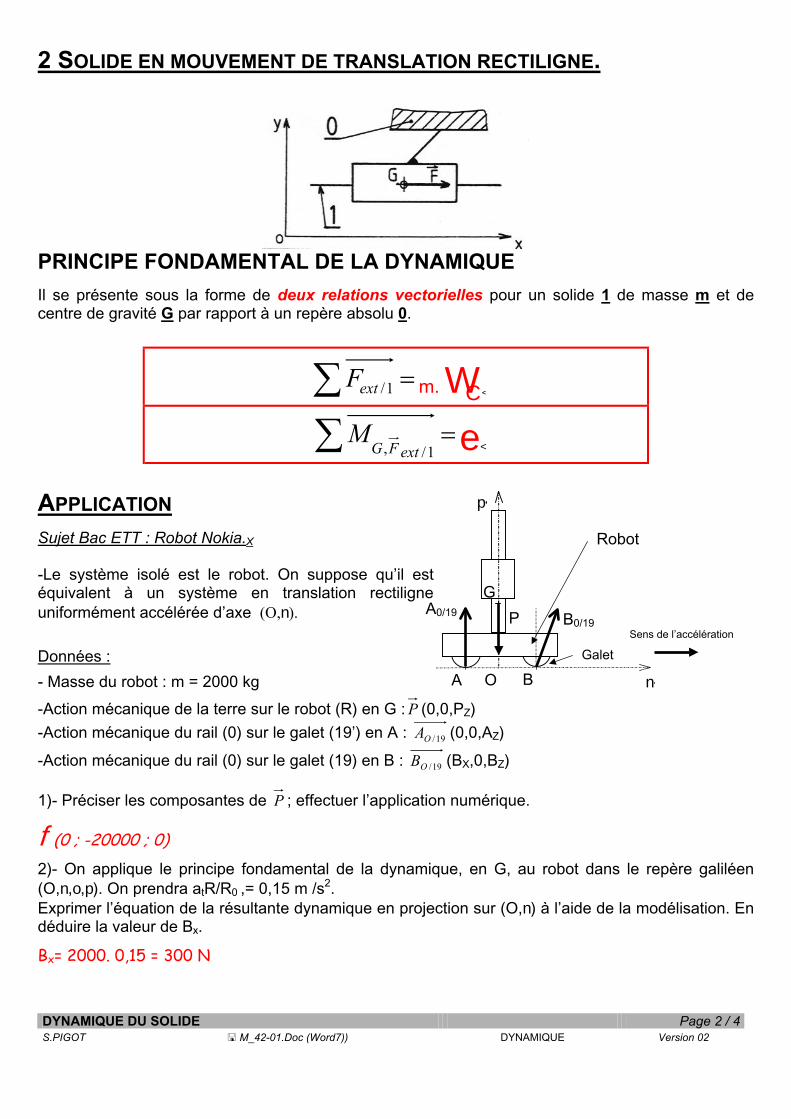
APPLICATION
Sujet Bac ETT : Robot Nokia.X
-Le système isolé est le robot. On suppose qu’il est équivalent à un système en translation rectiligne uniformément accélérée d’axe (O,n).
G
P Sens de l’accélération
B0/19
O
p<
n<
Robot
B A
A0/19
Galet
Données :
- Masse du robot : m = 2000 kg
-Action mécanique de la terre sur le robot (R) en G :P (0,0,PZ)
-Action mécanique du rail (0) sur le galet (19’) en A : 19/OA (0,0,AZ)
-Action mécanique du rail (0) sur le galet (19) en B : 19/OB (BX,0,BZ)
1)- Préciser les composantes de P ; effectuer l’application numérique.
f(0 ; -20000 ; 0) 2)- On applique le principe fondamental de la dynamique, en G, au robot dans le repère galiléen (O,n,o,p). On prendra atR/R0 ,= 0,15 m /s2. Exprimer l’équation de la résultante dynamique en projection sur (O,n) à l’aide de la modélisation. En déduire la valeur de Bx.
Bx= 2000. 0,15 = 300 N
DYNAMIQUE DU SOLIDE Page 2 / 4 S.PIGOT M_42-01.Doc (Word7)) DYNAMIQUE Version 02
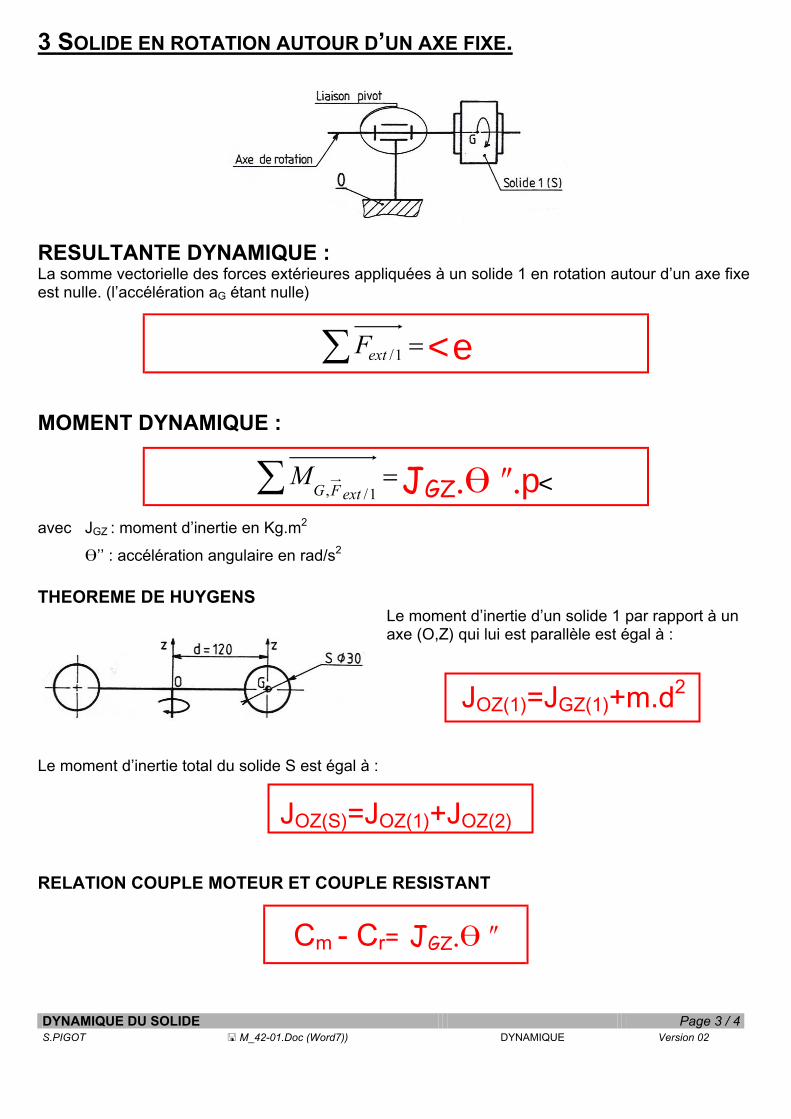
3 SOLIDE EN ROTATION AUTOUR D’UN AXE FIXE.
RESULTANTE DYNAMIQUE : La somme vectorielle des forces extérieures appliquées à un solide 1 en rotation autour d’un axe fixe est nulle. (l’accélération aG étant nulle)
=∑ 1/extF <e
MOMENT DYNAMIQUE :
=∑1/, extFG
M JGZ. .p<
avec JGZ : moment d’inertie en Kg.m2 ’’ : accélération angulaire en rad/s2 THEOREME DE HUYGENS
Le moment d’inertie d’un solide 1 par rapport à un axe (O,Z) qui lui est parallèle est égal à :
JOZ(1)=JGZ(1)+m.d2
Le moment d’inertie total du solide S est égal à :
JOZ(S)=JOZ(1)+JOZ(2)
RELATION COUPLE MOTEUR ET COUPLE RESISTANT
Cm - Cr= JGZ.
DYNAMIQUE DU SOLIDE Page 3 / 4 S.PIGOT M_42-01.Doc (Word7)) DYNAMIQUE Version 02
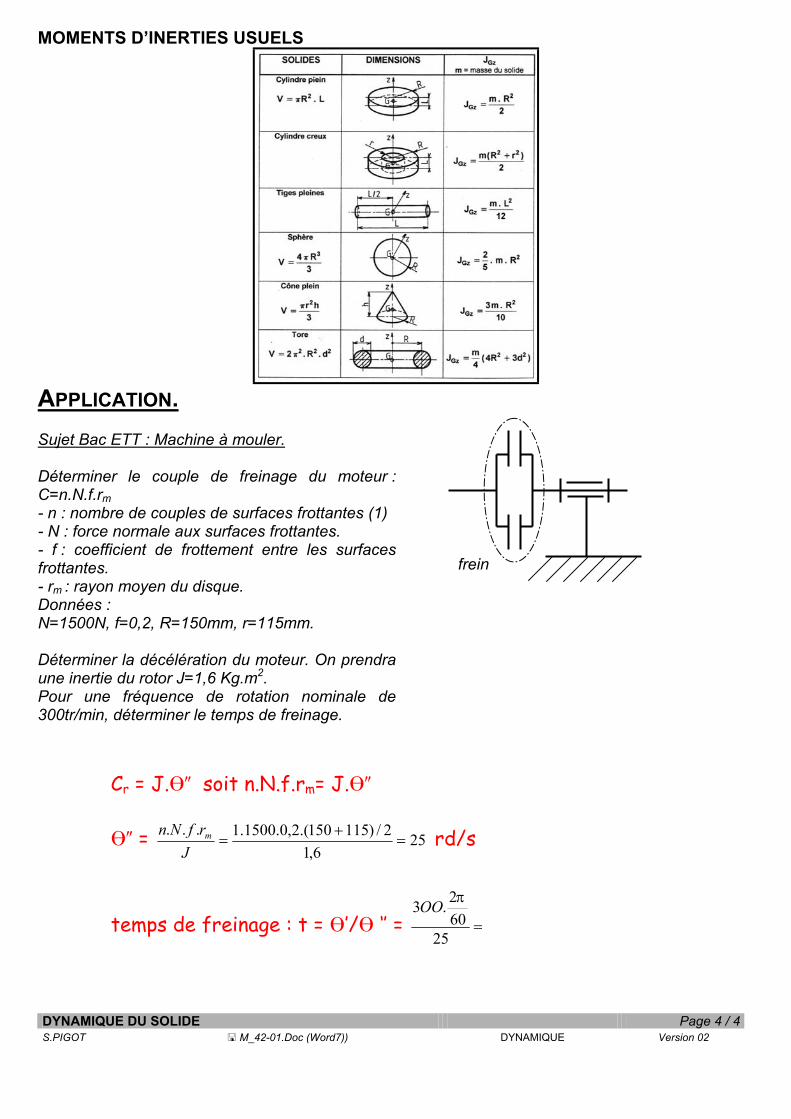
MOMENTS D’INERTIES USUELS
APPLICATION.
frein
Sujet Bac ETT : Machine à mouler. Déterminer le couple de freinage du moteur : C=n.N.f.rm - n : nombre de couples de surfaces frottantes (1) - N : force normale aux surfaces frottantes. - f : coefficient de frottement entre les surfaces frottantes. - rm : rayon moyen du disque. Données : N=1500N, f=0,2, R=150mm, r=115mm. Déterminer la décélération du moteur. On prendra une inertie du rotor J=1,6 Kg.m2. Pour une fréquence de rotation nominale de 300tr/min, déterminer le temps de freinage.
Cr = J. soit n.N.f.rm= J.
= 256,1
2/)115150.(2,0.1500.1...=
+=
J
rfNn m rd/s
temps de freinage : t = ’/ ‘’ = =25
60
2.3π
OO
DYNAMIQUE DU SOLIDE Page 4 / 4 S.PIGOT M_42-01.Doc (Word7)) DYNAMIQUE Version 02

















![Cours Mecanique Du Solide Rigide[1]](https://img.pdfslide.fr/doc/110x75/577d35a91a28ab3a6b910c72/cours-mecanique-du-solide-rigide1.jpg)










