Embed Size (px)
Citation preview
1/43 30/09/2005Version 2.0SARI
PROJET SARI - PREDIT 3Surveillance Automatisée de la Route pour l’Information des
conducteurs et des gestionnaires
RADARR -
Livrable n o 1.6
Etude de faisabilité de substituercertains capteurs physiques
en capteurs virtuelsLivrable n o 1.6.2
Rapport sur les recensements de substitutions possiblessous le double aspect scientifique et économique
Date : 30/09/2005Version : 2.0
Partenaires : Laboratoire Heudiasyc UMR CNRS/UTC6599XLIM / DMI / MOD / GERME
Auteurs : Guillaume BAFFETAli CHARARADominique MEIZELJoanny STEPHANT
Thème : RADARR
Diffusion : Partenaires SARI
Financement : DSCR - Direction de la Sécurité et dela Circulation Routières Responsable : Ali CHARARA
2/43 30/09/2005Version 2.0Table des matières
1 Contexte 3
2 Introduction 4
3 Vitesse longitudinale entre le véhicule et la chaussée 53.1 Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2 Moyens de mesure directs de la vitesse - existants . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2.1 Moyens de mesure optique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2.2 Moyens de mesure micro-ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2.3 Utilisation du GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2.4 Utilisation de l’odométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3 Moyens de mesure directs de la vitesse - expérimental . . . . . . . . . . . . . . . . . . . . . . . . 63.3.1 Capteur de vitesse par micro-ondes : ENSEEIHT . . . . . . . . . . . . . . . . . . . . . . . 6
3.4 Capteurs virtuels existants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4.1 Méthode "classique" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4.2 Méthode proposée par Kiencke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4.3 Méthode proposée par Jiang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.4.4 Autres capteurs virtuels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.5 Instrumentation disponible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124 Pente et dévers 13
4.1 Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.2 Moyens de mesure directs de la pente et du dévers - existants . . . . . . . . . . . . . . . . . . . 134.3 Capteurs virtuels existants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.3.1 Méthodes analytiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.3.2 Pente et dévers identifés par traitement d’image . . . . . . . . . . . . . . . . . . . . . . . 164.3.3 Observateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.4 Instrumentation disponible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.4.1 Avantages et inconvénients des différents capteurs possibles . . . . . . . . . . . . . . . . 18
5 Efforts d’interaction pneumatiques/chaussée 195.1 Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.2 Moyens de mesure directs des efforts - existants . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.2.1 Capteurs de couple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.2.2 Capteurs d’efforts et de moments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.2.3 Capteurs d’efforts et de moments - expérimental . . . . . . . . . . . . . . . . . . . . . . . 205.2.4 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.3 Modélisation du système pour la construction de capteurs virtuels . . . . . . . . . . . . . . . . . 225.3.1 Modèle " plan 4 roues " . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.3.2 Modèle de type bicyclette . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.3.3 Modèle de dynamique des roues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.3.4 Définitions des différents rayons de la roue . . . . . . . . . . . . . . . . . . . . . . . . . . 245.3.5 Angles de dérives et vitesses des roues . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.3.6 Modélisation du transfert de charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.3.7 Les glissements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.3.8 Modèles des forces du contact pneumatique/chaussée . . . . . . . . . . . . . . . . . . . 27
5.4 Méthodes possibles de reconstructions des efforts de contacts pneumatique/chaussée . . . . . 325.4.1 Etude de L. Ray . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.4.2 Etude de A. RABHI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.4.3 Etudes effectuées au laboratoire HEUDIASYC . . . . . . . . . . . . . . . . . . . . . . . . 34
6 Conclusion générale 35
Bibliographie 36
3/43 30/09/2005Version 2.0A Centrale gyrospcopique (microstrain) 38
B Capteur de vitesse par micro-ondes (Corrsys-datron) 39
C Capteur de vitesse optique (Corrsys-datron) 41
D Comparaison de différents moyens de mesure de la vitesse (Co rrsys-datron) 42
1 Contexte
Dans le cadre du projet PREDIT-SARI-RADARR, la tâche 1.6. intitulée "Etude sur les capteurs virtuels" apour objectif de remplacer sur les véhicules expérimentaux des capteurs trop coûteux pour être déployés àgrande échelle ou pour obtenir certaines données inaccessibles à la mesure. Par capteur virtuel, on entend desalgorithmes, implantés dans un ou des calculateurs, utilisant des capteurs peu coûteux, supposés implantésde série dans des véhicules à l’horizon de l’année 2008.
Certaines variables explicatives de la dynamique du véhicule et donc utilisables pour diagnostiquer uncomportement anormal du véhicule ont été listées lors de la création du projet. Il s’agit de :
– la vitesse longitudinale entre le véhicule et la chaussée– la pente et le dévers de la chaussée– les efforts d’interactions entre le pneumatique et la chaussée.Parmi les acteurs de SARI-RADARR, deux équipes de recherche1 ont, parmi leur domaine de compétence,
selon la terminologie de l’automatique, l’observation d’état appelée vulgairement "capteurs virtuels" ou encore"reconstructeur d’état".
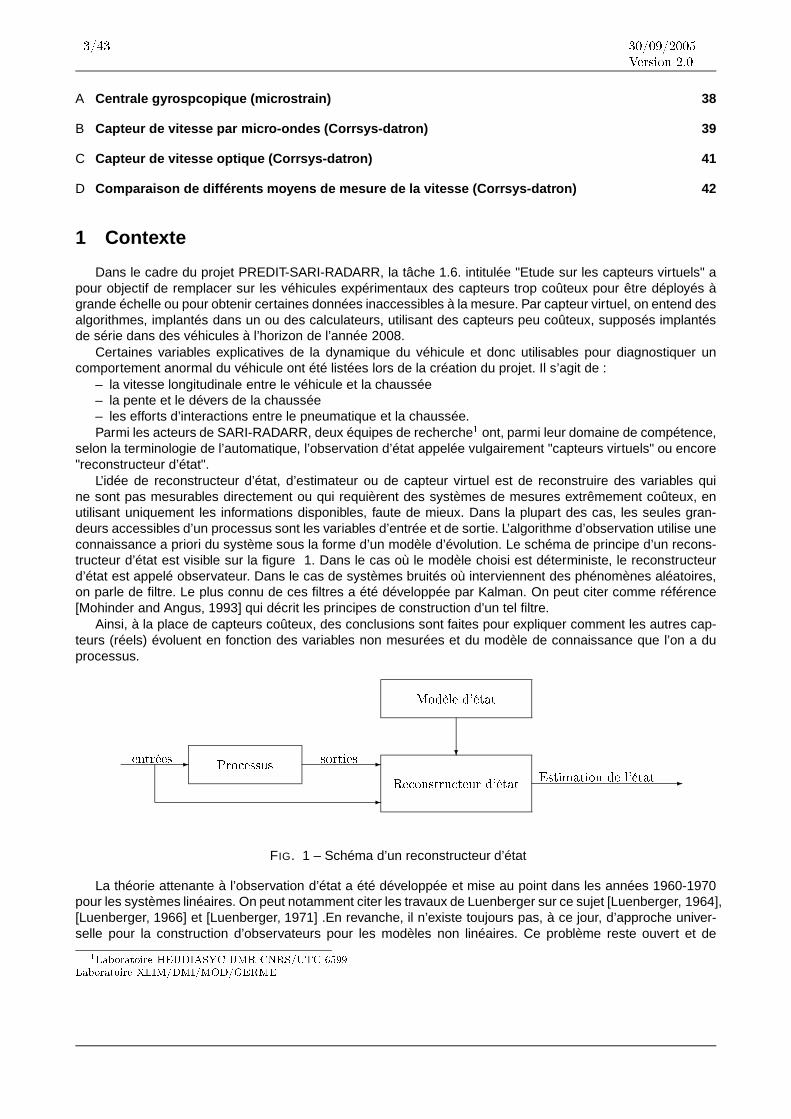
L’idée de reconstructeur d’état, d’estimateur ou de capteur virtuel est de reconstruire des variables quine sont pas mesurables directement ou qui requièrent des systèmes de mesures extrêmement coûteux, enutilisant uniquement les informations disponibles, faute de mieux. Dans la plupart des cas, les seules gran-deurs accessibles d’un processus sont les variables d’entrée et de sortie. L’algorithme d’observation utilise uneconnaissance a priori du système sous la forme d’un modèle d’évolution. Le schéma de principe d’un recons-tructeur d’état est visible sur la figure 1. Dans le cas où le modèle choisi est déterministe, le reconstructeurd’état est appelé observateur. Dans le cas de systèmes bruités où interviennent des phénomènes aléatoires,on parle de filtre. Le plus connu de ces filtres a été développée par Kalman. On peut citer comme référence[Mohinder and Angus, 1993] qui décrit les principes de construction d’un tel filtre.
Ainsi, à la place de capteurs coûteux, des conclusions sont faites pour expliquer comment les autres cap-teurs (réels) évoluent en fonction des variables non mesurées et du modèle de connaissance que l’on a duprocessus.
-entrées Pro essus -sorties-
Re onstru teur d'étatModèle d'état
?
-Estimation de l'étatFIG. 1 – Schéma d’un reconstructeur d’état
La théorie attenante à l’observation d’état a été développée et mise au point dans les années 1960-1970pour les systèmes linéaires. On peut notamment citer les travaux de Luenberger sur ce sujet [Luenberger, 1964],[Luenberger, 1966] et [Luenberger, 1971] .En revanche, il n’existe toujours pas, à ce jour, d’approche univer-selle pour la construction d’observateurs pour les modèles non linéaires. Ce problème reste ouvert et de1Laboratoire HEUDIASYC UMR CNRS/UTC 6599Laboratoire XLIM/DMI/MOD/GERME
4/43 30/09/2005Version 2.0nombreux travaux s’y rapportent. Bien sûr les véhicules automobiles sont des systèmes non linéaires com-plets et les deux équipes proposent de mettre en place des techniques afin de reconstruire les variablesprécédemment citées.
2 Introduction
Le présent document, s’intitule "Rapport sur les recencements de substitutions possibles sous le doubleaspect scientifique et économique".
Nous allons présenter, au cours de ce rapport, les différents moyens de mesures existant pour les diffé-rentes variables à reconstruire (pente et dévers, vitesse longitudinale entre le véhicule et la chaussée, effortsd’interaction entre les pneumatiques et la chaussée). Ensuite, nous présenterons quelques exemples de mé-thodes de "capteurs virtuels" issues de la littérature.
Les variables à reconstruire doivent être accessibles en temps-réel dans les calculateurs embarqués dansle véhicule expérimental. Nous ne présenterons donc, dans ce rapport que les capteurs et les méthodes dereconstruction des différentes variables qui peuvent être embarqués à bord du véhicule.
5/43 30/09/2005Version 2.03 Vitesse longitudinale entre le véhicule et la chaussée
3.1 Problématique
Le mesure de vitesse longitudinale du véhicule est indispensable vis-à-vis de l’application générale déve-loppée dans le cadre de SARI-RADARR. La connaissance de cette vitesse a deux objectifs principaux. Lepremier est la détermination de la vitesse de glissement des roues du véhicule. Cette vitesse de glissementest la variable principale nécessaire au calcul des efforts longitudinaux d’interaction entre le pneumatique etla chaussée. Le second objectif est le recalage des algorithmes de reconstruction du profil de la chaussée(pente, dévers et uni). En effet, les calculs sont effectués à bord du véhicule expérimental et ont une basede temps. Or, les informations présentant les caractéristiques de la chaussée sont utilisées à l’aide d’unebase géométrique. Le passage de la base temporelle à la base géométrique est dépendant de la vitesse duvéhicule.
Cette partie du rapport va présenter, dans un premier temps, différents moyens de mesure de la vitesse etdes moyens de mesures actuels disponibles dans le commerce. Les principes de mesure sont basés sur desmesures optiques, micro-ondes, odométriques et GPS.
Dans la seconde partie, des capteurs virtuels de reconstruction de la vitesse, issue de la bibliographie,seront présentés.
3.2 Moyens de mesure directs de la vitesse - existants
3.2.1 Moyens de mesure optique
La société Corrsys-Datron est spécialisée dans la mesure de vitesse de mobiles en mouvements. Cetteentreprise a développé de nombreux types de capteurs dont une série utilise un principe de mesure optique.Ce procédé consiste en l’analyse du défilement de la structure de la chaussée située en dessous du capteur.La série est nommée "Correvit". Un exemple de capteur est présenté dans l’annexe C. Le coût d’un tel capteurest de l’ordre de 15ke.
Ce type de capteur présente différents inconvénients. En effet, du fait de principe de mesure, il faut êtreattentif au positionnement du capteur sur le véhicule. Par exemple, lorsque le capteur est monté sur un des cô-tés de la masse suspendue du véhicule, il mesure une vitesse latérale complémentaire due au mouvement deroulis du véhicule. La qualité de la mesure de vitesse transversale s’en retrouve dégradée. De la même façon,le capteur voit une mesure de vitesse longitudinale complémentaire lors des phases de tangage importants.
De plus, ce type de capteur peut être mis en défaut lors de certaines conditions expérimentales. Prenons lecas d’une chaussée recouverte d’un film d’eau et du véhicule à l’arrêt. Si la piste d’essai est traversée par duvent, il se créé des ondulations sur la pellicule d’eau, le capteur détecte alors un mouvement de la chausséeet mesure une vitesse.
De la même façon, lorsque des revêtements particuliers sont utilisés, par exemple des plaques de verre,pour des essais à faible adhérence, le capteur n’arrive pas à détecter des variations dans la structure dela chaussée et commet des erreurs importantes. De la même façon, lorsqu’un film d’eau est présent sur lachaussée et de la réflexion qu’il induit, les données issues du capteur doivent être utilisées avec précautions.Ces problèmes sont illustrés dans l’annexe D.
Ce type de capteur donne de très bon résultats dans des conditions expérimentales de bonne qualité. Ilsservent d’ailleurs de mesure de vitesse de référence dans de nombreuses équipes de recherche ainsi quechez les constructeurs automobiles.
3.2.2 Moyens de mesure micro-ondes
Il existe aussi des moyens de mesure de la vitesse utilisant la mesure d’effet doppler sur les micro-ondesdans le cadre de la mesure de vitesse. Par exemple, le capteur présenté en annexe B utilise ce principe. Lecoût d’un tel capteur est de l’ordre de 15ke.
Du fait du principe de mesure basé sur le taux de réflexion des micro-ondes sur la surface examinée, cetype de mesure est fortement dépendant de la qualité du revêtement et des conditions expérimentales del’essai.
6/43 30/09/2005Version 2.0L’annexe D présente des résultats de comparaison entre différents capteurs utilisant différents principes de
mesure. Elle met en évidence la baisse de qualité de mesure du capteur par micro-ondes sur des surfacesmouillées.
3.2.3 Utilisation du GPS
Parmi les informations envoyées par un système GPS, il existe l’information de vitesse (contenue dans latrame vtg). L’avantage de ce capteur est que sa mesure est indépendante de la qualité du revêtement surlequel se trouve le véhicule. En revanche, la mesure est fortement dépendante de la vision satellitaire del’antenne. Plus le nombre de satellites visibles est grand et meilleur est l’estimation. De plus, les fréquencesd’acquisition actuelles sont de l’ordre de 20Hz, ce qui est trop faible dans certaines conditions expérimentales.De plus, le GPS présente un défaut non négligeable représenté par une latence variable sur les mesures. Eneffet, sur des essais de GPS différentiels, la latence peut être de l’ordre de 100ms. Or la mesure de vitesseest principalement utile pour la détermination du glissement de roue. Le retard de la donnée issue du GPS nepermet plus une reconstruction instantanée de ce glissement.
Le coût d’un système GPS différentiel est de l’ordre de 10ke.
3.2.4 Utilisation de l’odométrie
Le systèmes ABS (Anti-blocage de roue) utilisent l’information de vitesse rotationnelle des roues. Deuxgrands principes de mesures existent.
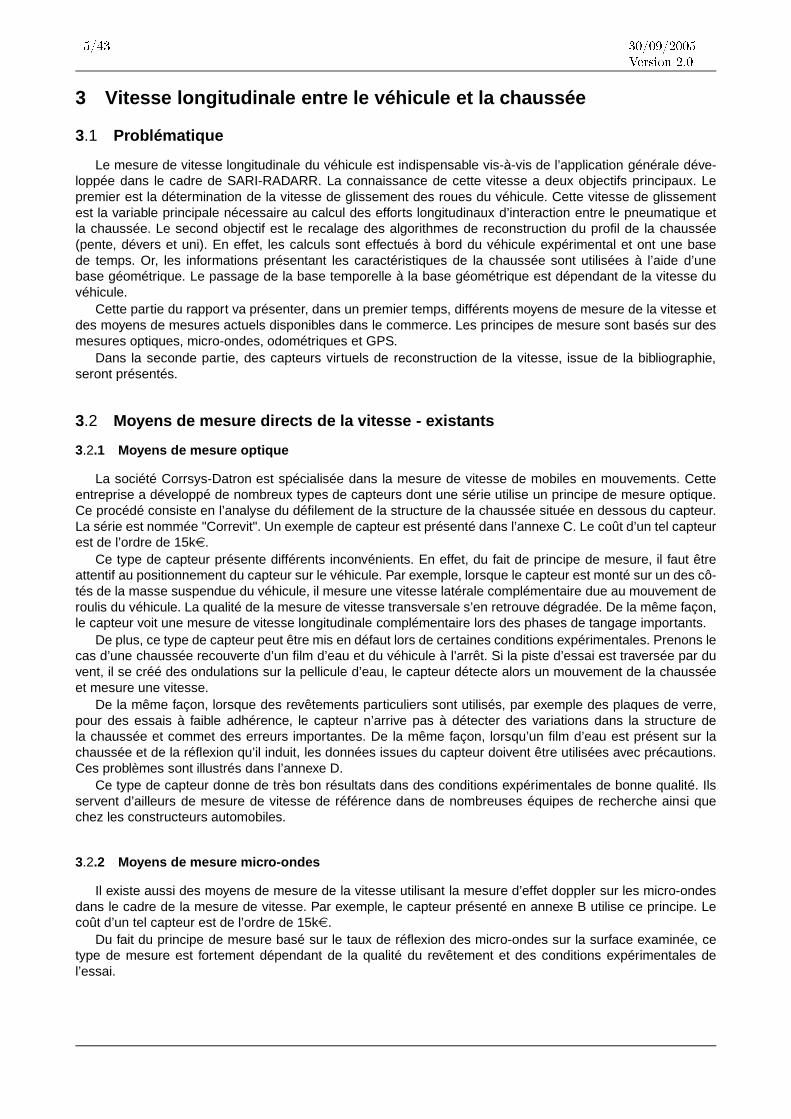
Dans le premier cas, la roue du véhicule est équipée d’une roue dentée. Un capteur inductif est placé per-pendiculairement à la roue dentée. Du fait du passage des dents au devant du capteurs, le champ magnétiqueest modifié, un courant est induit dans la bobine et la mesure de vitesse est reconstruite.
La figure 2(a) présente un tel système développé par la société BOSCH et utilisé dans les systèmes ABSdéveloppés par cette société.
(a) apteur indu tif BOSCH (b) roulement apteur SNRFIG. 2 – Mesure de vitesse de rotation de roues
Il est également possible de poser un anneau composé d’aimants de polarité différentes répartis le long dela couronne circulaire. Une sonde à effet Hall est placé au devant de cette couronne et détecte les variationsdu champ magnétique pour en déduire la vitesse de rotation de la roue. La figure 2(b) présente un tel systèmedéveloppé par la société SNR.
3.3 Moyens de mesure directs de la vitesse - expérimental
3.3.1 Capteur de vitesse par micro-ondes : ENSEEIHT
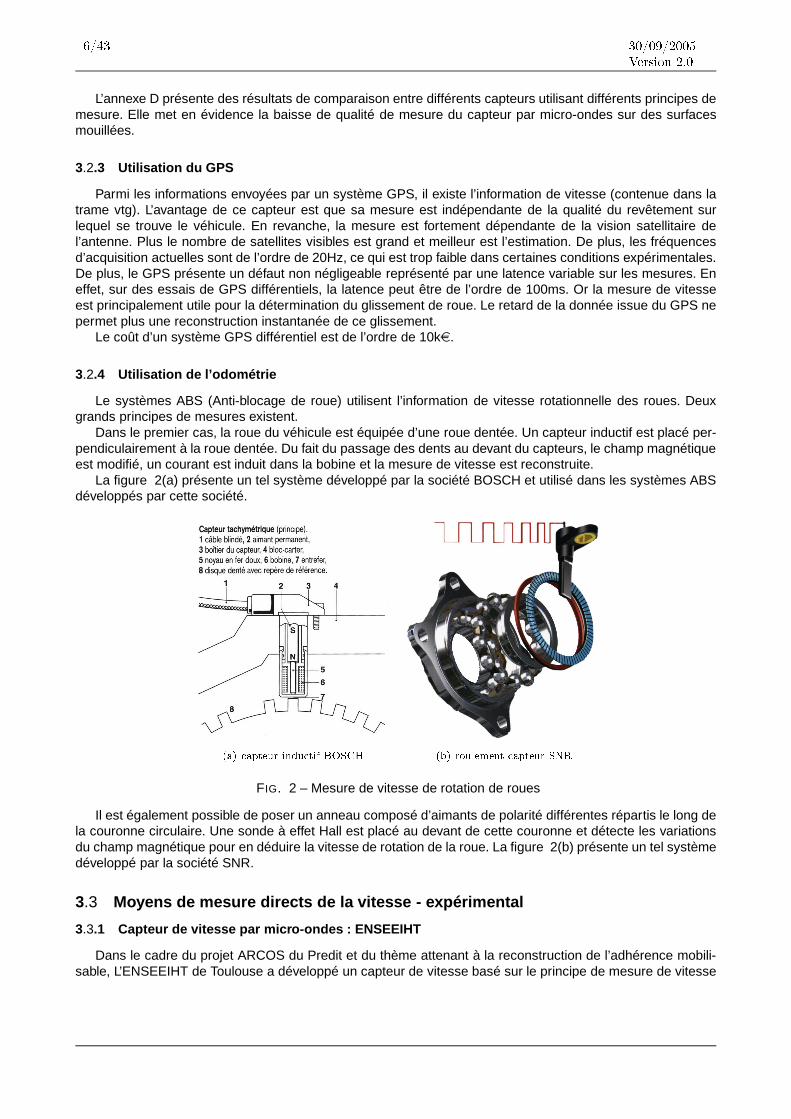
Dans le cadre du projet ARCOS du Predit et du thème attenant à la reconstruction de l’adhérence mobili-sable, L’ENSEEIHT de Toulouse a développé un capteur de vitesse basé sur le principe de mesure de vitesse
7/43 30/09/2005Version 2.0par effet doppler en micro-ondes.
FIG. 3 – Reconstruction de la vitesse longitudinale à l’aide des capteurs développés par l’ENSEEIHT
La photo de gauche de la figure 3 présente le montage des capteurs de l’ENSEEIHT sur le véhicule 307 del’INRETS-MA. La partie de droite présente le résultat d’une acquisition réalisée par l’INRETS-MA comparantla mesure issue d’un capteur Correvit aux capteurs de l’ENSEEIHT.
Les résultats donnés par ce type de capteurs sont encourageants. En effet, malgré une certaine imprécisionsur la valeur de la vitesse et le niveau de bruit sur la mesure, ce type de capteur présente l’avantage d’êtrepeu coûteux. Une étude plus approfondie doit être menée afin de limiter ces défauts.
Le capteur développé présente un coût de l’ordre de la centaine d’euros et est installé sur le véhiculeexpérimental du projet SARI-RADARR.
3.4 Capteurs virtuels existants
Cet état de l’art non exhaustif2 présente trois méthodes de reconstruction de la vitesse du véhicule. Lapremière et la plus facile à mettre en œuvre consiste à prendre la moyenne des vitesses linéaires des rouesarrières d’un véhicule de type "traction". La seconde a été proposée par Kiencke et fusionne les vitesses desquatre roues avec l’accéléromètre longitudinal. La troisième et dernière méthode étudiée ici a été proposéepar Jiang. Cette méthodologie est présentée comme un filtre adaptatif, qui limite les variations de la vitesse enfonction des possibilités de décélération du véhicule.
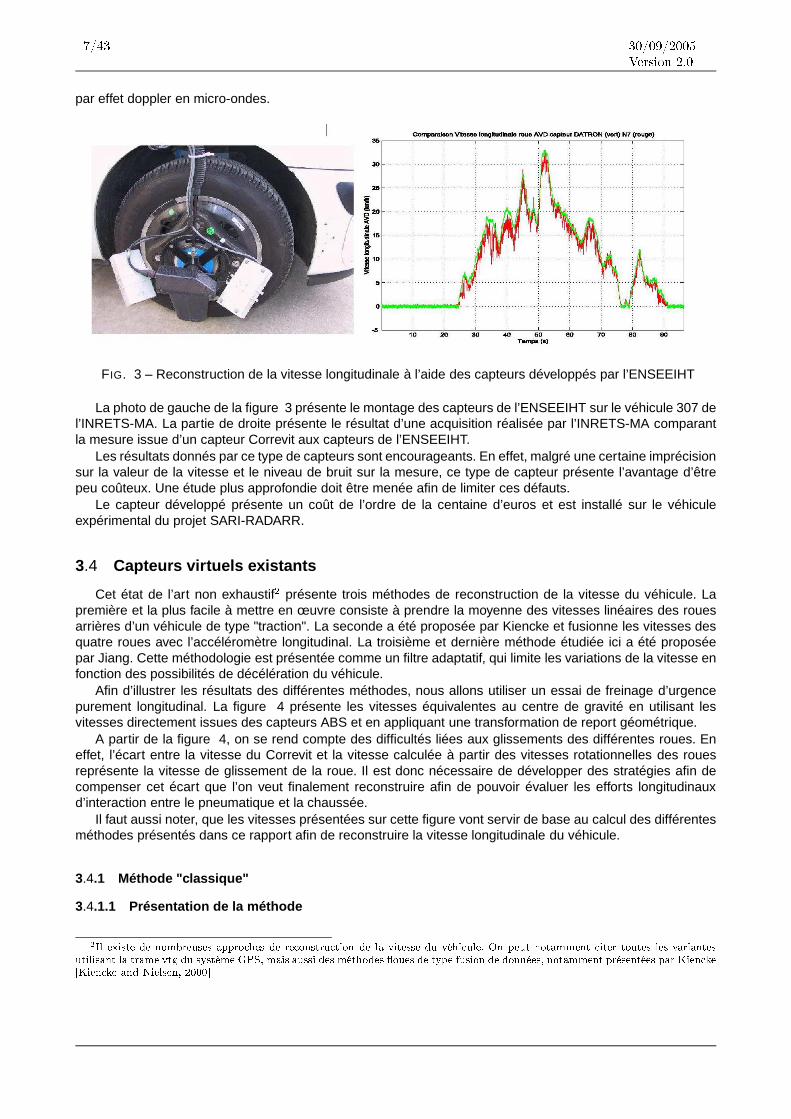
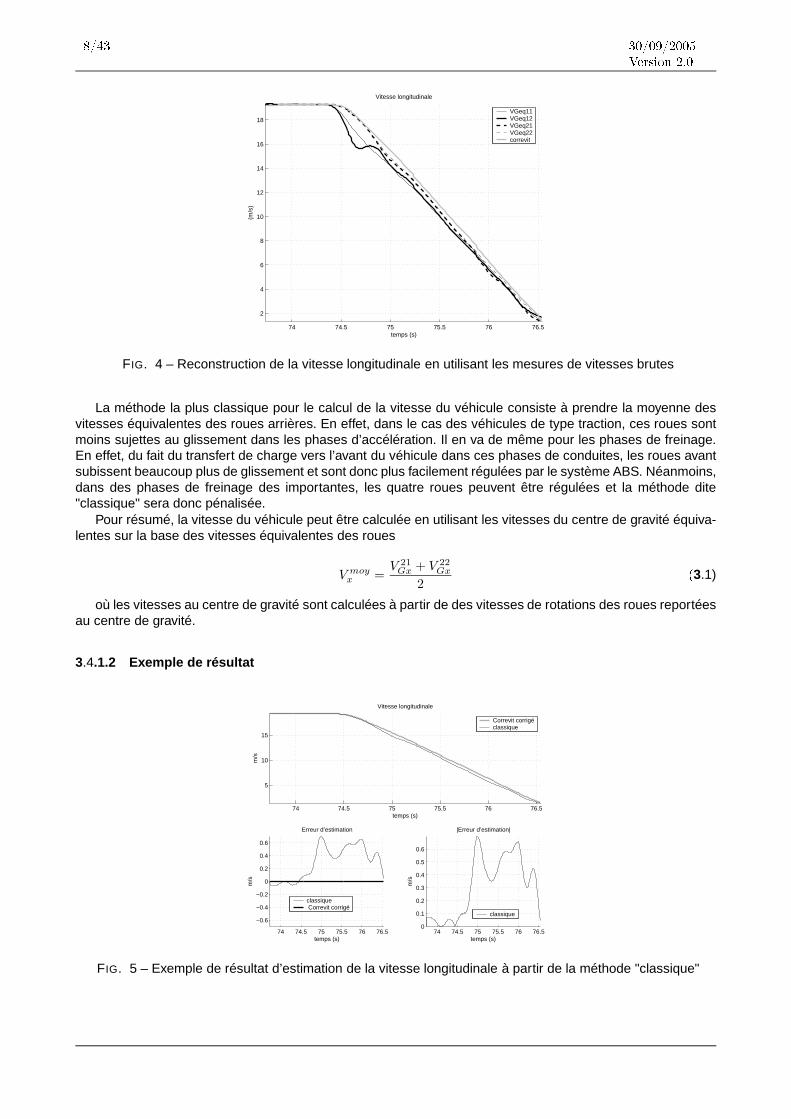
Afin d’illustrer les résultats des différentes méthodes, nous allons utiliser un essai de freinage d’urgencepurement longitudinal. La figure 4 présente les vitesses équivalentes au centre de gravité en utilisant lesvitesses directement issues des capteurs ABS et en appliquant une transformation de report géométrique.
A partir de la figure 4, on se rend compte des difficultés liées aux glissements des différentes roues. Eneffet, l’écart entre la vitesse du Correvit et la vitesse calculée à partir des vitesses rotationnelles des rouesreprésente la vitesse de glissement de la roue. Il est donc nécessaire de développer des stratégies afin decompenser cet écart que l’on veut finalement reconstruire afin de pouvoir évaluer les efforts longitudinauxd’interaction entre le pneumatique et la chaussée.
Il faut aussi noter, que les vitesses présentées sur cette figure vont servir de base au calcul des différentesméthodes présentés dans ce rapport afin de reconstruire la vitesse longitudinale du véhicule.
3.4.1 Méthode "classique"
3.4.1.1 Présentation de la méthode2Il existe de nombreuses appro hes de re onstru tion de la vitesse du véhi ule. On peut notamment iter toutes les variantesutilisant la trame vtg du système GPS, mais aussi des méthodes �oues de type fusion de données, notamment présentées par Kien ke[Kien ke and Nielsen, 2000℄
8/43 30/09/2005Version 2.0
74 74.5 75 75.5 76 76.5
2
4
6
8
10
12
14
16
18
temps (s)
(m/s
)
Vitesse longitudinale
VGeq11VGeq12VGeq21VGeq22correvit
FIG. 4 – Reconstruction de la vitesse longitudinale en utilisant les mesures de vitesses brutes
La méthode la plus classique pour le calcul de la vitesse du véhicule consiste à prendre la moyenne desvitesses équivalentes des roues arrières. En effet, dans le cas des véhicules de type traction, ces roues sontmoins sujettes au glissement dans les phases d’accélération. Il en va de même pour les phases de freinage.En effet, du fait du transfert de charge vers l’avant du véhicule dans ces phases de conduites, les roues avantsubissent beaucoup plus de glissement et sont donc plus facilement régulées par le système ABS. Néanmoins,dans des phases de freinage des importantes, les quatre roues peuvent être régulées et la méthode dite"classique" sera donc pénalisée.
Pour résumé, la vitesse du véhicule peut être calculée en utilisant les vitesses du centre de gravité équiva-lentes sur la base des vitesses équivalentes des roues
V moyx =V 21Gx + V 22
Gx
2(3.1)
où les vitesses au centre de gravité sont calculées à partir de des vitesses de rotations des roues reportéesau centre de gravité.
3.4.1.2 Exemple de résultat
74 74.5 75 75.5 76 76.5
5
10
15
temps (s)
m/s
Vitesse longitudinale
74 74.5 75 75.5 76 76.5
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Erreur d’estimation
temps (s)
m/s
74 74.5 75 75.5 76 76.50
0.1
0.2
0.3
0.4
0.5
0.6
|Erreur d’estimation|
temps (s)
m/s
Correvit corrigéclassique
classique Correvit corrigé
classique
FIG. 5 – Exemple de résultat d’estimation de la vitesse longitudinale à partir de la méthode "classique"
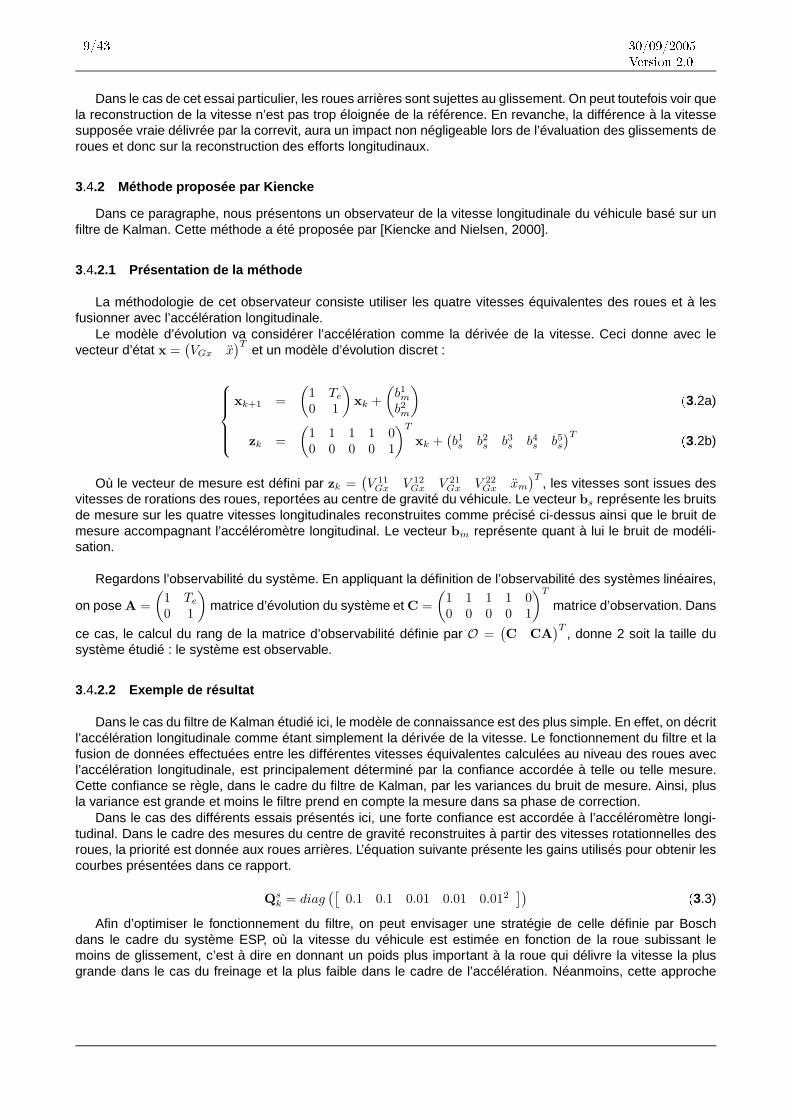
9/43 30/09/2005Version 2.0Dans le cas de cet essai particulier, les roues arrières sont sujettes au glissement. On peut toutefois voir que
la reconstruction de la vitesse n’est pas trop éloignée de la référence. En revanche, la différence à la vitessesupposée vraie délivrée par la correvit, aura un impact non négligeable lors de l’évaluation des glissements deroues et donc sur la reconstruction des efforts longitudinaux.
3.4.2 Méthode proposée par Kiencke
Dans ce paragraphe, nous présentons un observateur de la vitesse longitudinale du véhicule basé sur unfiltre de Kalman. Cette méthode a été proposée par [Kiencke and Nielsen, 2000].
3.4.2.1 Présentation de la méthode
La méthodologie de cet observateur consiste utiliser les quatre vitesses équivalentes des roues et à lesfusionner avec l’accélération longitudinale.
Le modèle d’évolution va considérer l’accélération comme la dérivée de la vitesse. Ceci donne avec levecteur d’état x =
(VGx x
)Tet un modèle d’évolution discret :
xk+1 =
(1 Te0 1
)xk +
(b1mb2m
) (3.2a)
zk =
(1 1 1 1 00 0 0 0 1
)T
xk +(b1s b2s b3s b4s b5s
)T (3.2b)
Où le vecteur de mesure est défini par zk =(V 11Gx V 12
Gx V 21Gx V 22
Gx xm)T
, les vitesses sont issues desvitesses de rorations des roues, reportées au centre de gravité du véhicule. Le vecteur bs représente les bruitsde mesure sur les quatre vitesses longitudinales reconstruites comme précisé ci-dessus ainsi que le bruit demesure accompagnant l’accéléromètre longitudinal. Le vecteur bm représente quant à lui le bruit de modéli-sation.
Regardons l’observabilité du système. En appliquant la définition de l’observabilité des systèmes linéaires,
on pose A =
(1 Te0 1
)matrice d’évolution du système et C =
(1 1 1 1 00 0 0 0 1
)T
matrice d’observation. Dans
ce cas, le calcul du rang de la matrice d’observabilité définie par O =(C CA
)T, donne 2 soit la taille du
système étudié : le système est observable.
3.4.2.2 Exemple de résultat
Dans le cas du filtre de Kalman étudié ici, le modèle de connaissance est des plus simple. En effet, on décritl’accélération longitudinale comme étant simplement la dérivée de la vitesse. Le fonctionnement du filtre et lafusion de données effectuées entre les différentes vitesses équivalentes calculées au niveau des roues avecl’accélération longitudinale, est principalement déterminé par la confiance accordée à telle ou telle mesure.Cette confiance se règle, dans le cadre du filtre de Kalman, par les variances du bruit de mesure. Ainsi, plusla variance est grande et moins le filtre prend en compte la mesure dans sa phase de correction.
Dans le cas des différents essais présentés ici, une forte confiance est accordée à l’accéléromètre longi-tudinal. Dans le cadre des mesures du centre de gravité reconstruites à partir des vitesses rotationnelles desroues, la priorité est donnée aux roues arrières. L’équation suivante présente les gains utilisés pour obtenir lescourbes présentées dans ce rapport.
Qsk = diag
([0.1 0.1 0.01 0.01 0.012
]) (3.3)
Afin d’optimiser le fonctionnement du filtre, on peut envisager une stratégie de celle définie par Boschdans le cadre du système ESP, où la vitesse du véhicule est estimée en fonction de la roue subissant lemoins de glissement, c’est à dire en donnant un poids plus important à la roue qui délivre la vitesse la plusgrande dans le cas du freinage et la plus faible dans le cadre de l’accélération. Néanmoins, cette approche
10/43 30/09/2005Version 2.074 74.5 75 75.5 76 76.5
5
10
15
temps (s)
m/s
Vitesse longitudinale
74 74.5 75 75.5 76 76.5
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Erreur d’estimation
temps (s)
m/s
74 74.5 75 75.5 76 76.50
0.1
0.2
0.3
0.4
0.5
0.6
|Erreur d’estimation|
temps (s)
m/s
Correvit corrigéKiencke
KienckeCorrevit Corrigé
Kiencke
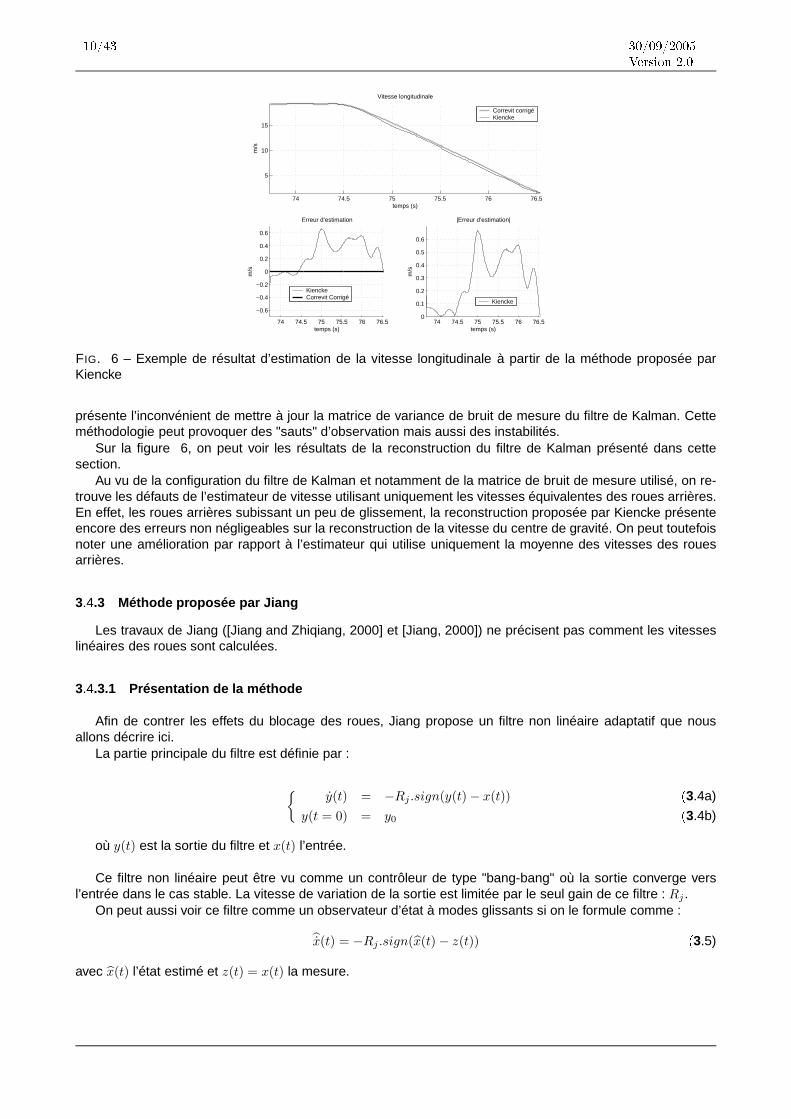
FIG. 6 – Exemple de résultat d’estimation de la vitesse longitudinale à partir de la méthode proposée parKiencke
présente l’inconvénient de mettre à jour la matrice de variance de bruit de mesure du filtre de Kalman. Cetteméthodologie peut provoquer des "sauts" d’observation mais aussi des instabilités.
Sur la figure 6, on peut voir les résultats de la reconstruction du filtre de Kalman présenté dans cettesection.
Au vu de la configuration du filtre de Kalman et notamment de la matrice de bruit de mesure utilisé, on re-trouve les défauts de l’estimateur de vitesse utilisant uniquement les vitesses équivalentes des roues arrières.En effet, les roues arrières subissant un peu de glissement, la reconstruction proposée par Kiencke présenteencore des erreurs non négligeables sur la reconstruction de la vitesse du centre de gravité. On peut toutefoisnoter une amélioration par rapport à l’estimateur qui utilise uniquement la moyenne des vitesses des rouesarrières.
3.4.3 Méthode proposée par Jiang
Les travaux de Jiang ([Jiang and Zhiqiang, 2000] et [Jiang, 2000]) ne précisent pas comment les vitesseslinéaires des roues sont calculées.
3.4.3.1 Présentation de la méthode
Afin de contrer les effets du blocage des roues, Jiang propose un filtre non linéaire adaptatif que nousallons décrire ici.
La partie principale du filtre est définie par :
{y(t) = −Rj .sign(y(t) − x(t)) (3.4a)
y(t = 0) = y0 (3.4b)
où y(t) est la sortie du filtre et x(t) l’entrée.
Ce filtre non linéaire peut être vu comme un contrôleur de type "bang-bang" où la sortie converge versl’entrée dans le cas stable. La vitesse de variation de la sortie est limitée par le seul gain de ce filtre : Rj .
On peut aussi voir ce filtre comme un observateur d’état à modes glissants si on le formule comme :
x(t) = −Rj .sign(x(t) − z(t)) (3.5)
avec x(t) l’état estimé et z(t) = x(t) la mesure.
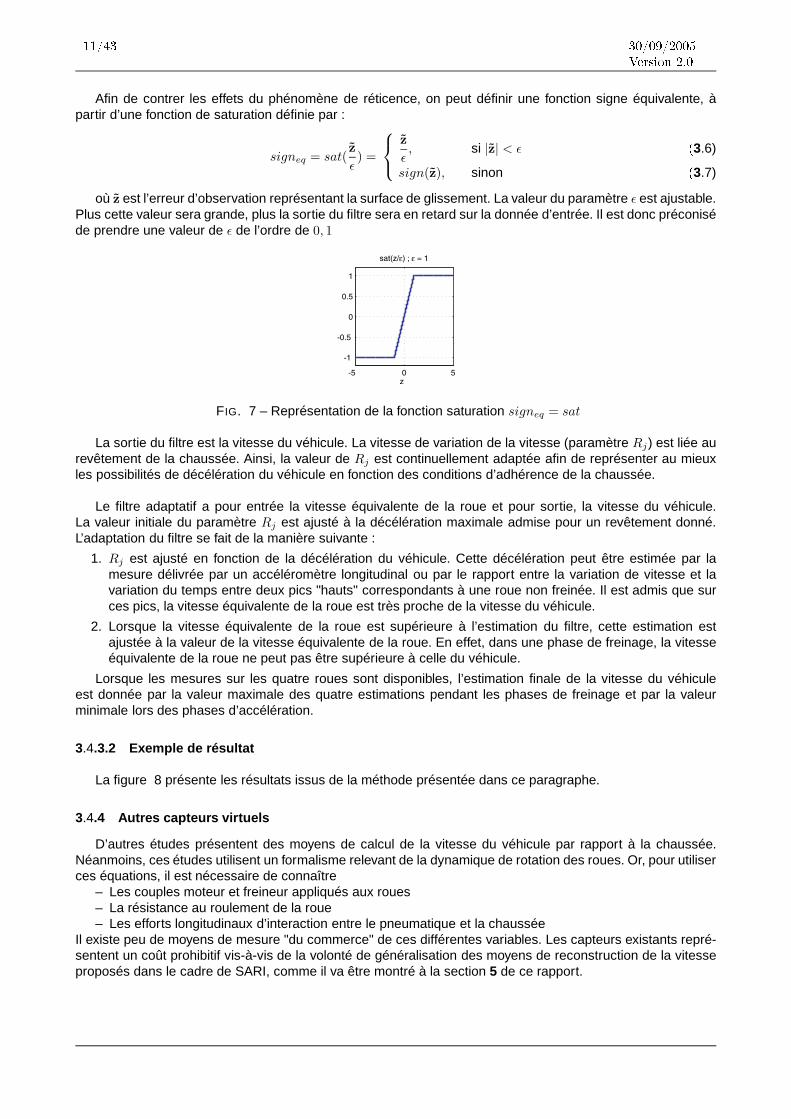
11/43 30/09/2005Version 2.0Afin de contrer les effets du phénomène de réticence, on peut définir une fonction signe équivalente, à
partir d’une fonction de saturation définie par :
signeq = sat(z
ǫ) =
z
ǫ, si |z| < ǫ (3.6)
sign(z), sinon (3.7)
où z est l’erreur d’observation représentant la surface de glissement. La valeur du paramètre ǫ est ajustable.Plus cette valeur sera grande, plus la sortie du filtre sera en retard sur la donnée d’entrée. Il est donc préconiséde prendre une valeur de ǫ de l’ordre de 0, 1
-5 0 5
-1
-0.5
0
0.5
1
sat(z/ε) ; ε = 1
z
FIG. 7 – Représentation de la fonction saturation signeq = sat
La sortie du filtre est la vitesse du véhicule. La vitesse de variation de la vitesse (paramètre Rj) est liée aurevêtement de la chaussée. Ainsi, la valeur de Rj est continuellement adaptée afin de représenter au mieuxles possibilités de décélération du véhicule en fonction des conditions d’adhérence de la chaussée.
Le filtre adaptatif a pour entrée la vitesse équivalente de la roue et pour sortie, la vitesse du véhicule.La valeur initiale du paramètre Rj est ajusté à la décélération maximale admise pour un revêtement donné.L’adaptation du filtre se fait de la manière suivante :
1. Rj est ajusté en fonction de la décélération du véhicule. Cette décélération peut être estimée par lamesure délivrée par un accéléromètre longitudinal ou par le rapport entre la variation de vitesse et lavariation du temps entre deux pics "hauts" correspondants à une roue non freinée. Il est admis que surces pics, la vitesse équivalente de la roue est très proche de la vitesse du véhicule.
2. Lorsque la vitesse équivalente de la roue est supérieure à l’estimation du filtre, cette estimation estajustée à la valeur de la vitesse équivalente de la roue. En effet, dans une phase de freinage, la vitesseéquivalente de la roue ne peut pas être supérieure à celle du véhicule.
Lorsque les mesures sur les quatre roues sont disponibles, l’estimation finale de la vitesse du véhiculeest donnée par la valeur maximale des quatre estimations pendant les phases de freinage et par la valeurminimale lors des phases d’accélération.
3.4.3.2 Exemple de résultat
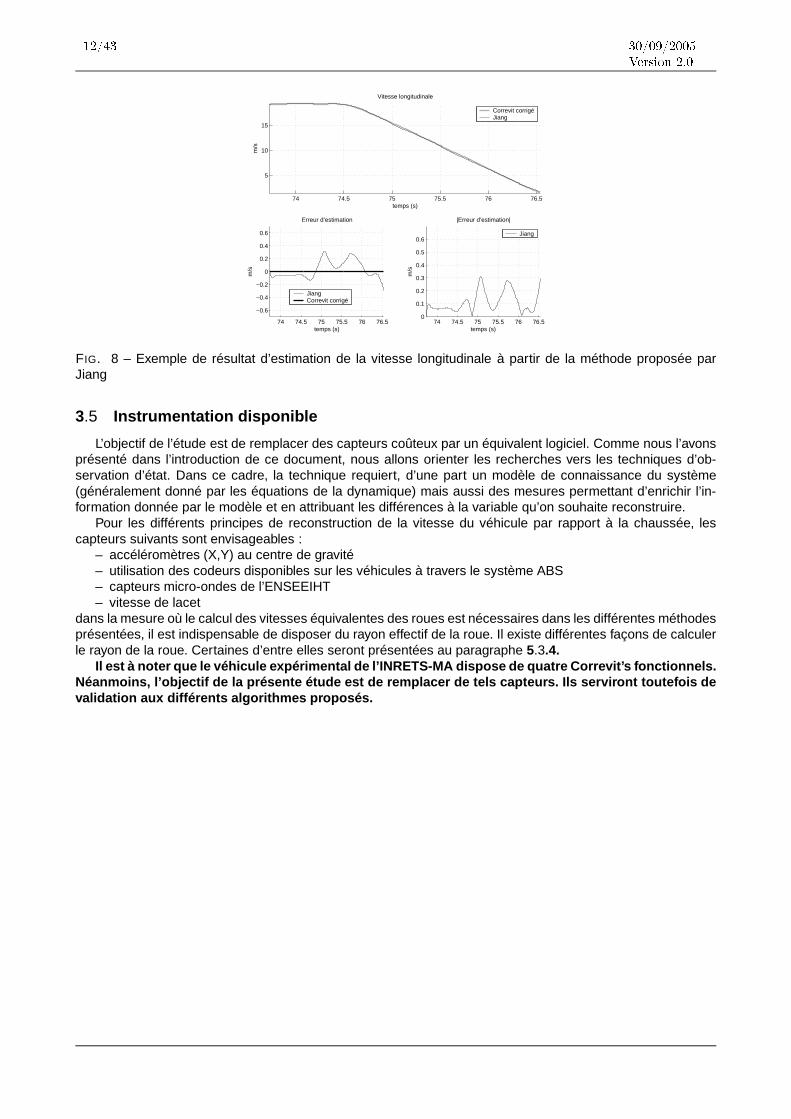
La figure 8 présente les résultats issus de la méthode présentée dans ce paragraphe.
3.4.4 Autres capteurs virtuels
D’autres études présentent des moyens de calcul de la vitesse du véhicule par rapport à la chaussée.Néanmoins, ces études utilisent un formalisme relevant de la dynamique de rotation des roues. Or, pour utiliserces équations, il est nécessaire de connaître
– Les couples moteur et freineur appliqués aux roues– La résistance au roulement de la roue– Les efforts longitudinaux d’interaction entre le pneumatique et la chaussée
Il existe peu de moyens de mesure "du commerce" de ces différentes variables. Les capteurs existants repré-sentent un coût prohibitif vis-à-vis de la volonté de généralisation des moyens de reconstruction de la vitesseproposés dans le cadre de SARI, comme il va être montré à la section 5 de ce rapport.
12/43 30/09/2005Version 2.074 74.5 75 75.5 76 76.5
5
10
15
temps (s)
m/s
Vitesse longitudinale
74 74.5 75 75.5 76 76.5
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Erreur d’estimation
temps (s)
m/s
74 74.5 75 75.5 76 76.50
0.1
0.2
0.3
0.4
0.5
0.6
|Erreur d’estimation|
temps (s)
m/s
Correvit corrigéJiang
JiangCorrevit corrigé
Jiang
FIG. 8 – Exemple de résultat d’estimation de la vitesse longitudinale à partir de la méthode proposée parJiang
3.5 Instrumentation disponible
L’objectif de l’étude est de remplacer des capteurs coûteux par un équivalent logiciel. Comme nous l’avonsprésenté dans l’introduction de ce document, nous allons orienter les recherches vers les techniques d’ob-servation d’état. Dans ce cadre, la technique requiert, d’une part un modèle de connaissance du système(généralement donné par les équations de la dynamique) mais aussi des mesures permettant d’enrichir l’in-formation donnée par le modèle et en attribuant les différences à la variable qu’on souhaite reconstruire.
Pour les différents principes de reconstruction de la vitesse du véhicule par rapport à la chaussée, lescapteurs suivants sont envisageables :
– accéléromètres (X,Y) au centre de gravité– utilisation des codeurs disponibles sur les véhicules à travers le système ABS– capteurs micro-ondes de l’ENSEEIHT– vitesse de lacet
dans la mesure où le calcul des vitesses équivalentes des roues est nécessaires dans les différentes méthodesprésentées, il est indispensable de disposer du rayon effectif de la roue. Il existe différentes façons de calculerle rayon de la roue. Certaines d’entre elles seront présentées au paragraphe 5.3.4.
Il est à noter que le véhicule expérimental de l’INRETS-MA di spose de quatre Correvit’s fonctionnels.Néanmoins, l’objectif de la présente étude est de remplacer de tels capteurs. Ils serviront toutefois devalidation aux différents algorithmes proposés.
13/43 30/09/2005Version 2.04 Pente et dévers
4.1 Problématique
La connaissance de la pente et du dévers de la chaussée sont des éléments indispensables en vue del’application finale développée dans le cadre du projet SARI-RADARR. En effet, afin de détecter les rupturesde la route à l’aide d’un véhicule expérimental, ces variables permettent d’améliorer la modélisation des mou-vements du véhicule dans le simulateur embarqué CALLAS.
En effet, si le simulateur n’a pas connaissance de ces caractéristiques de la chaussée, les procéduresde détection de défauts peuvent être mise en échec. Il existe effectivement une indétermination entre, parexemple, la diminution de l’adhérence transversale disponible et la présence de dévers. De la même façon, onne sait pas dire si l’augmentation du couple appliqué par le moteur est du à une variation de la pente ou à unevariation d’adhérence.
Dans cette partie du rapport, nous allons présenter, dans un premier temps, les moyens de mesure actuelsde la pente et du dévers de la chaussée. Dans un second temps, nous présenterons un état de l’art nonexhaustif de la reconstruction de ces variables à l’aide de capteurs virtuels.
4.2 Moyens de mesure directs de la pente et du dévers - existants
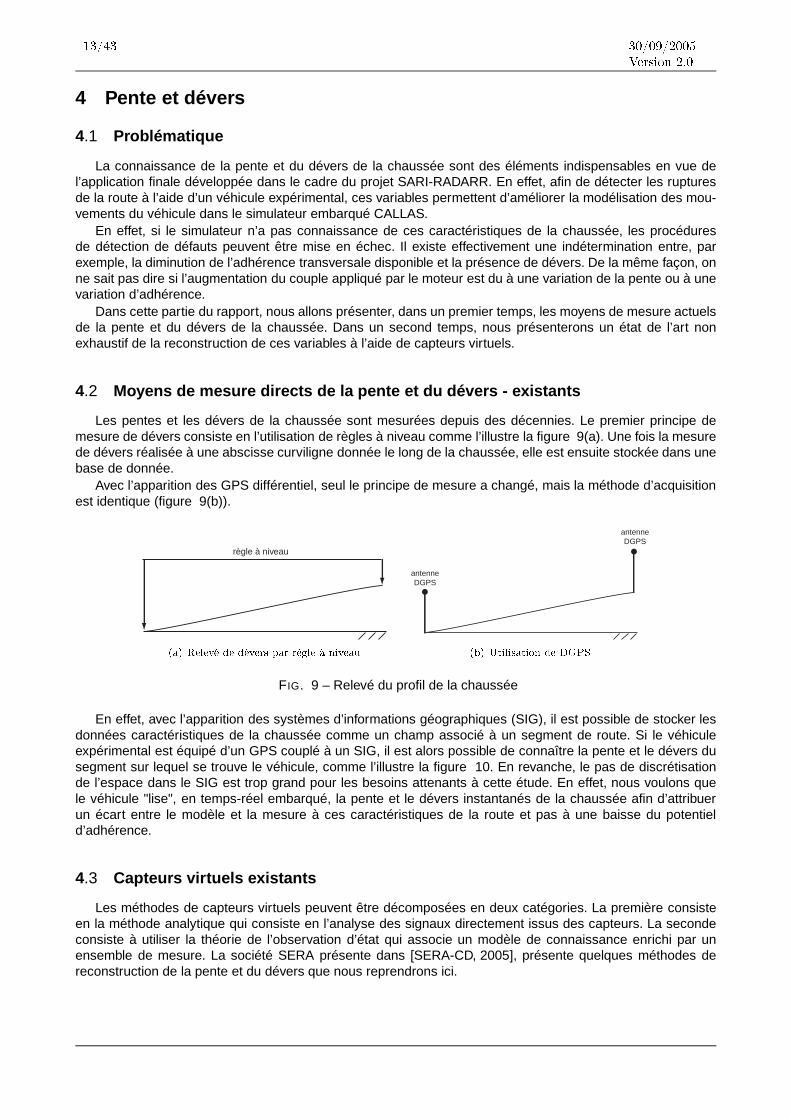
Les pentes et les dévers de la chaussée sont mesurées depuis des décennies. Le premier principe demesure de dévers consiste en l’utilisation de règles à niveau comme l’illustre la figure 9(a). Une fois la mesurede dévers réalisée à une abscisse curviligne donnée le long de la chaussée, elle est ensuite stockée dans unebase de donnée.
Avec l’apparition des GPS différentiel, seul le principe de mesure a changé, mais la méthode d’acquisitionest identique (figure 9(b)).
règle à niveau
(a) Relevé de dévers par règle à niveauantenne DGPS
antenne DGPS
(b) Utilisation de DGPSFIG. 9 – Relevé du profil de la chaussée
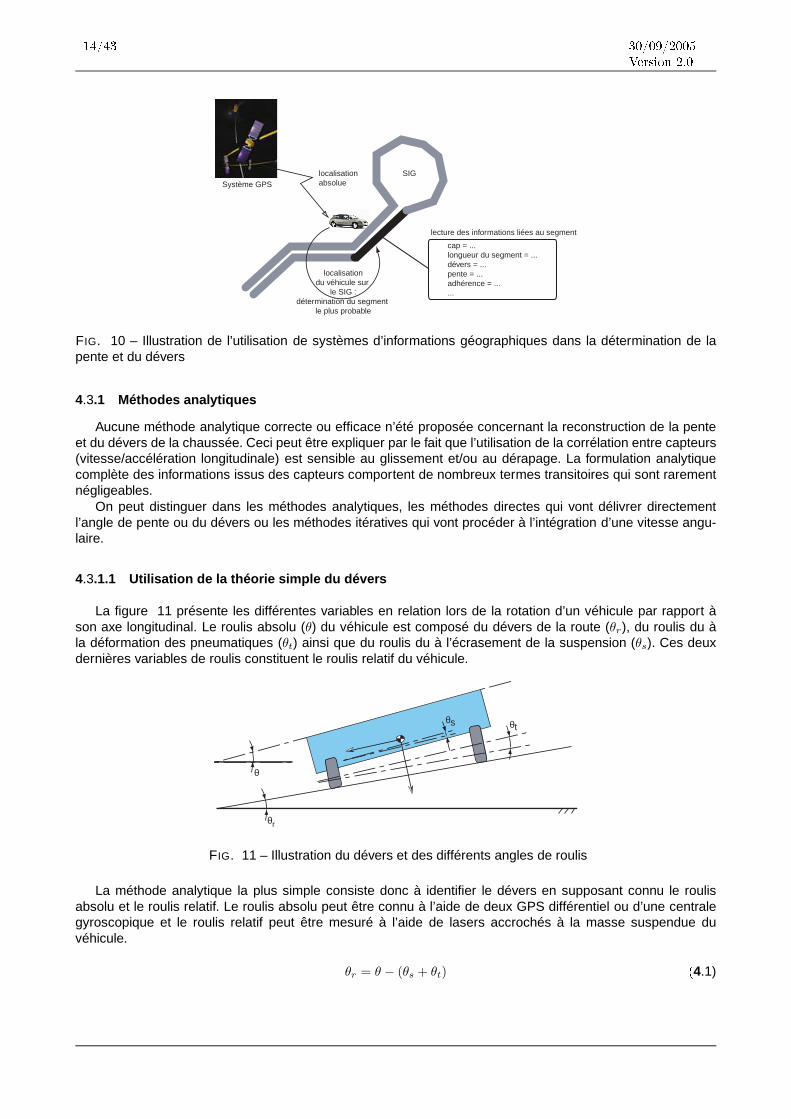
En effet, avec l’apparition des systèmes d’informations géographiques (SIG), il est possible de stocker lesdonnées caractéristiques de la chaussée comme un champ associé à un segment de route. Si le véhiculeexpérimental est équipé d’un GPS couplé à un SIG, il est alors possible de connaître la pente et le dévers dusegment sur lequel se trouve le véhicule, comme l’illustre la figure 10. En revanche, le pas de discrétisationde l’espace dans le SIG est trop grand pour les besoins attenants à cette étude. En effet, nous voulons quele véhicule "lise", en temps-réel embarqué, la pente et le dévers instantanés de la chaussée afin d’attribuerun écart entre le modèle et la mesure à ces caractéristiques de la route et pas à une baisse du potentield’adhérence.
4.3 Capteurs virtuels existants
Les méthodes de capteurs virtuels peuvent être décomposées en deux catégories. La première consisteen la méthode analytique qui consiste en l’analyse des signaux directement issus des capteurs. La secondeconsiste à utiliser la théorie de l’observation d’état qui associe un modèle de connaissance enrichi par unensemble de mesure. La société SERA présente dans [SERA-CD, 2005], présente quelques méthodes dereconstruction de la pente et du dévers que nous reprendrons ici.
14/43 30/09/2005Version 2.0cap = ... longueur du segment = ... dévers = ... pente = ... adhérence = ... ...
Système GPSlocalisation absolue
localisation du véhicule sur
le SIG : détermination du segment
le plus probable
SIG
lecture des informations liées au segment
FIG. 10 – Illustration de l’utilisation de systèmes d’informations géographiques dans la détermination de lapente et du dévers
4.3.1 Méthodes analytiques
Aucune méthode analytique correcte ou efficace n’été proposée concernant la reconstruction de la penteet du dévers de la chaussée. Ceci peut être expliquer par le fait que l’utilisation de la corrélation entre capteurs(vitesse/accélération longitudinale) est sensible au glissement et/ou au dérapage. La formulation analytiquecomplète des informations issus des capteurs comportent de nombreux termes transitoires qui sont rarementnégligeables.
On peut distinguer dans les méthodes analytiques, les méthodes directes qui vont délivrer directementl’angle de pente ou du dévers ou les méthodes itératives qui vont procéder à l’intégration d’une vitesse angu-laire.
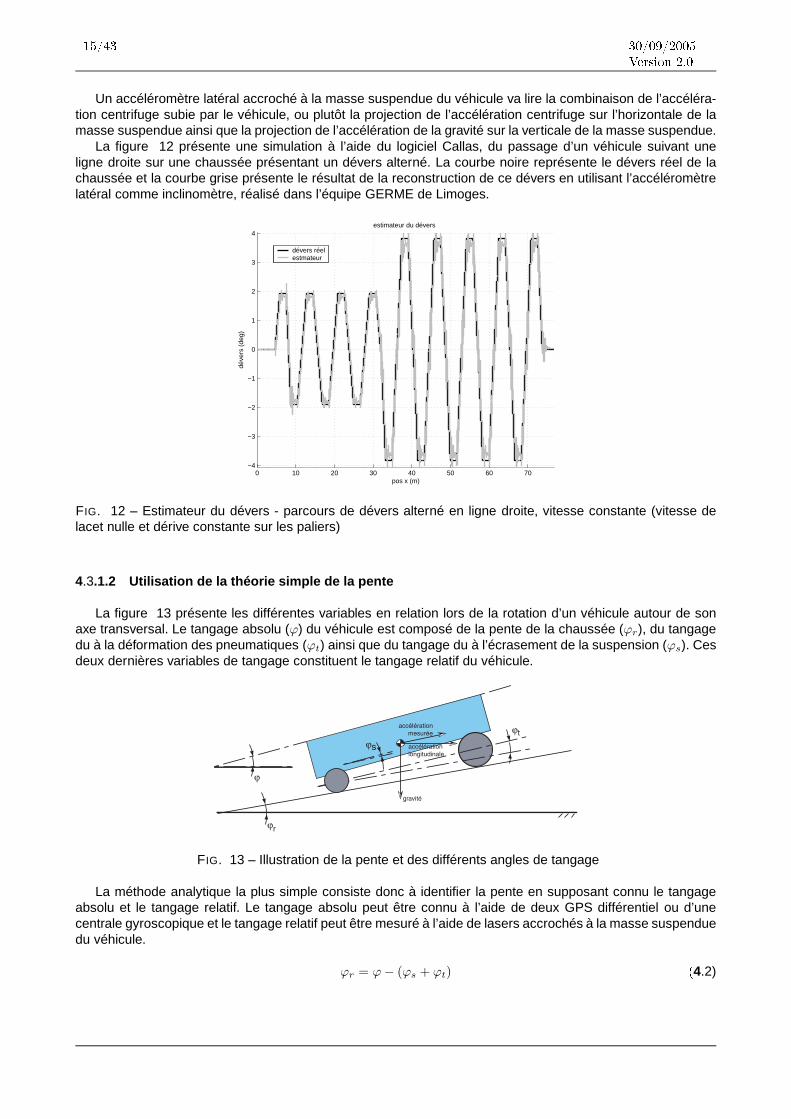
4.3.1.1 Utilisation de la théorie simple du dévers
La figure 11 présente les différentes variables en relation lors de la rotation d’un véhicule par rapport àson axe longitudinal. Le roulis absolu (θ) du véhicule est composé du dévers de la route (θr), du roulis du àla déformation des pneumatiques (θt) ainsi que du roulis du à l’écrasement de la suspension (θs). Ces deuxdernières variables de roulis constituent le roulis relatif du véhicule.
θr
θ
θtθs
FIG. 11 – Illustration du dévers et des différents angles de roulis
La méthode analytique la plus simple consiste donc à identifier le dévers en supposant connu le roulisabsolu et le roulis relatif. Le roulis absolu peut être connu à l’aide de deux GPS différentiel ou d’une centralegyroscopique et le roulis relatif peut être mesuré à l’aide de lasers accrochés à la masse suspendue duvéhicule.
θr = θ − (θs + θt) (4.1)
15/43 30/09/2005Version 2.0Un accéléromètre latéral accroché à la masse suspendue du véhicule va lire la combinaison de l’accéléra-
tion centrifuge subie par le véhicule, ou plutôt la projection de l’accélération centrifuge sur l’horizontale de lamasse suspendue ainsi que la projection de l’accélération de la gravité sur la verticale de la masse suspendue.
La figure 12 présente une simulation à l’aide du logiciel Callas, du passage d’un véhicule suivant uneligne droite sur une chaussée présentant un dévers alterné. La courbe noire représente le dévers réel de lachaussée et la courbe grise présente le résultat de la reconstruction de ce dévers en utilisant l’accéléromètrelatéral comme inclinomètre, réalisé dans l’équipe GERME de Limoges.
0 10 20 30 40 50 60 70−4
−3
−2
−1
0
1
2
3
4estimateur du dévers
pos x (m)
déve
rs (
deg)
dévers réelestmateur
FIG. 12 – Estimateur du dévers - parcours de dévers alterné en ligne droite, vitesse constante (vitesse delacet nulle et dérive constante sur les paliers)
4.3.1.2 Utilisation de la théorie simple de la pente
La figure 13 présente les différentes variables en relation lors de la rotation d’un véhicule autour de sonaxe transversal. Le tangage absolu (ϕ) du véhicule est composé de la pente de la chaussée (ϕr), du tangagedu à la déformation des pneumatiques (ϕt) ainsi que du tangage du à l’écrasement de la suspension (ϕs). Cesdeux dernières variables de tangage constituent le tangage relatif du véhicule.
ϕr
ϕ
ϕt
ϕs accélération longitudinale
gravité
accélération mesurée
FIG. 13 – Illustration de la pente et des différents angles de tangage
La méthode analytique la plus simple consiste donc à identifier la pente en supposant connu le tangageabsolu et le tangage relatif. Le tangage absolu peut être connu à l’aide de deux GPS différentiel ou d’unecentrale gyroscopique et le tangage relatif peut être mesuré à l’aide de lasers accrochés à la masse suspenduedu véhicule.
ϕr = ϕ− (ϕs + ϕt) (4.2)
16/43 30/09/2005Version 2.0Un accéléromètre longitudinal accroché à la masse suspendue du véhicule va lire la combinaison de la
projection de l’accélération longitudinale sur l’axe horizontal de la caisse et de l’accélération de la pesanteursur la verticale de celle-ci.
4.3.2 Pente et dévers identifés par traitement d’image
Certaines équipes de recherches se sont intéressées à la reconstruction simultanée de la pente et dudévers. Par exemple, le LASMEA a présenté une méthode de reconstruction basée sur un système de vision([Chapuis et al., 2002]).
La première étape de cette méthodologie consiste à identifier les limites de la route ainsi que les tracésdélimitants les voies à l’aide d’un modèle d’image de la chaussée. Une fois la délimitation de la chausséereconstruite, une identification des paramètres d’un modèle en trois dimensions de la chaussée est réalisée àl’aide de considérations statistiques à l’aide d’un modèle de connaissance. Ce modèle contient des variablesattenantes au moyen expérimental comme l’angle de la caméra et la position latérale du véhicule sur la chaus-sée ainsi que des informations telle que l’angle de braquage des roues.
4.3.3 Observateurs
4.3.3.1 Dévers
•Dans [Ryu and Gerdes, 2004] et [Ryu, 2005], une méthode d’estimation du roulis et du dévers est pré-senté. Un modèle de bicyclette, étendu à la dynamique de roulis et utilisant un modèle d’effort latéral d’inter-action entre le pneumatique et la chaussée linéaire.
Le dévers de chaussée est alors traité comme une entrée inconnue du modèle et une perturbation.Une des mesures mise à la disposition de l’algorithme est celle du roulis absolu obtenue à l’aide de deux
GPS différentiels, posé de chaque côté du véhicule expérimental. L’algorithme d’observation utilisé ici est unobservateur de Luenberger, dont le gain a été calculé à l’aide d’un filtre de Kalman.
•[Hahn et al., 2002] propose une méthode de reconstruction du dévers à l’aide d’un observateur de pertur-bation. Le modèle de véhicule est un modèle de bicyclette (lacet-dérive) étendu à un vecteur de perturbationscontenant les variations de la matrice d’évolution dues aux incertitudes sur les rigidités de dérive ainsi qu’unterme lié au dévers de la chaussée.
L’hypothèse de perturbations constantes est posée et un observateur linéaire de Luenberger est conçu surla base de ce modèle. Une fois les données de perturbations reconstruites, [Hahn et al., 2002] met en placeune stratégie de découplage entre les effets dus au dévers de ceux dus aux incertitudes paramétriques.
L’observateur est ensuite testé sur des données expérimentales acquises sur un semi-remorque.
•[Tseng, 2001] propose deux méthodes d’estimation de l’angle de dévers de la chaussée. La première estbasée sur une hypothèse statique et la seconde est considérée dans le cadre dynamique.
L’analyse est basée sur un modèle de bicyclette linéaire et sur l’identification de la part prise par le déverssur les signaux issus de l’accéléromètre latéral ainsi que sur la vitesse de lacet.
L’algorithme est testé sur des données expérimentales et comparé à une mesure réalisée par deux GPSdifférentiels.
4.3.3.2 Pente
•Thomas Massel [Massel and Eve, 2004] présente un observateur permettant de reconstruire le tangageabsolu du véhicule (ϕ). Pour ce faire, un modèle d’évolution est élaboré sur la base des mesures réalisée parsles accéléromètres longitudinal et vertical.
Le modèle non linéaire utilisé est le suivant :
17/43 30/09/2005Version 2.0
(Vxϕ
)=
g sin(ϕ) + xm
g
Vxcos(ϕ) −
1
Vxzm
(4.3)
Où les indices (m) représente des variables mesurées par des capteurs.Massel met en œuvre deux types d’observateur : un observateur de Luenberger appliqué au modèle linéa-
risé ainsi qu’un filtre de Kalman étendu. Seule la mesure de vitesse est mise à la disposition de l’algorithmepour reconstruire le tangage absolu du véhicule.
Les deux observateurs sont testés dans différentes conditions expérimentales. Tout d’abord sur une routeplane, puis sur une route plane en mauvais état. Les observateurs sont ensuite testés sur une route quiprésente une forte variation de pente. Enfin, les réponses des méthodes est testée lors de phase de freinageet de parcours circulaire.
•[Hiemer, 2004] propose un observateur linéaire basé sur le modèle suivant :(Vxϕr
)=
(0 −g0 0
) (Vxϕr
)+
(1mv
0
) (∑ij Fxij − Fxw
) (4.4)
Où Fxij est la force longitudinale appliquée à la roue d’indice ij et Fxw est la force de résistance aérody-namique.
L’algorithme d’observation utilise uniquement la vitesse du véhicule comme mesure. La méthode n’estvalidée qu’à l’aide de données de simulation.
4.4 Instrumentation disponible
L’objectif de l’étude est de remplacer des capteurs coûteux par un équivalent logiciel. Comme nous l’avonsprésenté dans l’introduction de ce document, nous allons orienter les recherches vers les techniques d’ob-servation d’état. Dans ce cadre, la technique requiert, d’une part un modèle de connaissance du système(généralement donné par les équations de la dynamique) mais aussi des mesures permettant d’enrichir l’in-formation donnée par le modèle et en attribuant les différences à la variable qu’on souhaite reconstruire.L’instrumentation sera embarquée à bord du véhicule expérimental.
Pour les différents principes de reconstruction de la pente et du dévers de la chaussée, les capteurs sui-vants sont envisageables :
– accéléromètres (X,Y,Z) au centre de gravité– gyromètres (X,Y,Z)– débattement de suspension– mesure de la vitesse (pour le passage à la distance)D’autres capteurs présentent un coût acceptable mais ne sont pas prévus d’être implantés de série sur les
véhicules :– mesure de hauteur caisse par ultrasons– accéléromètres de dynamique verticale de roue– caméra de scène avantEnfin, des capteurs coûteux et précis existent, mais l’objectif de l’étude est de s’en passer :– lasers de hauteur caisse– centrale gyroscopique d’attitude (Un exemple de centrale d’attitude est présenté à la section A)– double DGPS
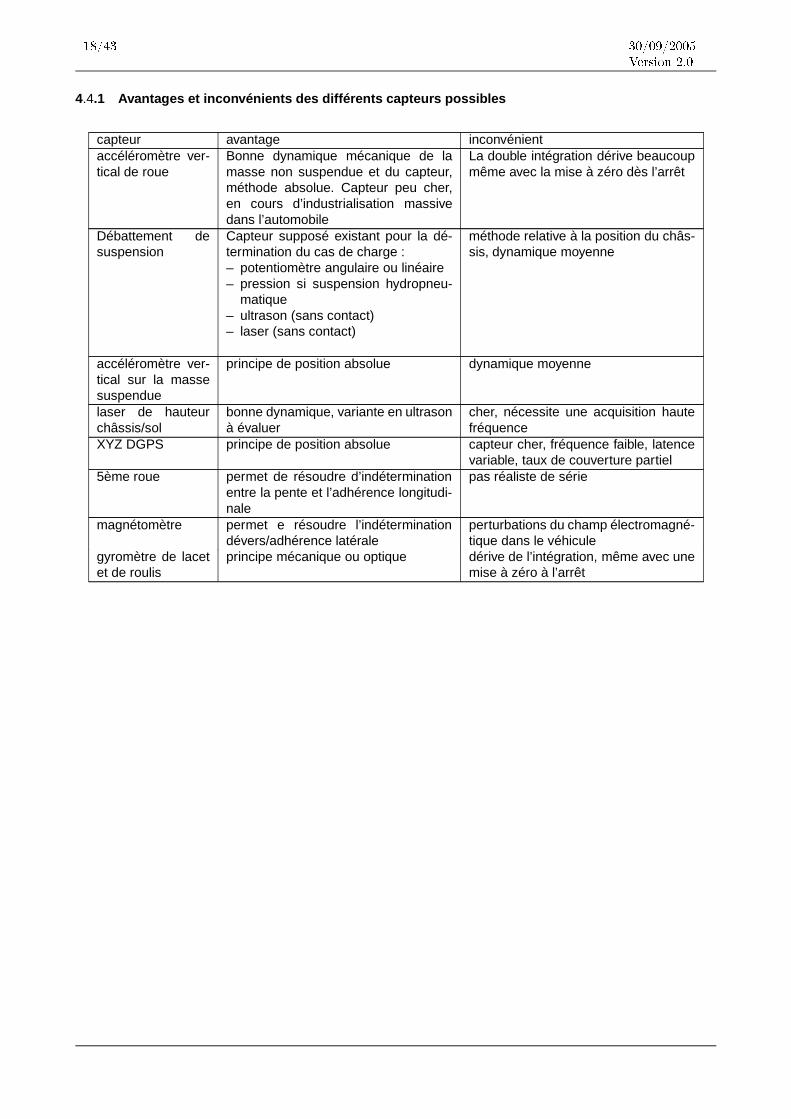
18/43 30/09/2005Version 2.04.4.1 Avantages et inconvénients des différents capteurs poss ibles
capteur avantage inconvénientaccéléromètre ver-tical de roue
Bonne dynamique mécanique de lamasse non suspendue et du capteur,méthode absolue. Capteur peu cher,en cours d’industrialisation massivedans l’automobile
La double intégration dérive beaucoupmême avec la mise à zéro dès l’arrêt
Débattement desuspension
Capteur supposé existant pour la dé-termination du cas de charge :– potentiomètre angulaire ou linéaire– pression si suspension hydropneu-
matique– ultrason (sans contact)– laser (sans contact)
méthode relative à la position du châs-sis, dynamique moyenne
accéléromètre ver-tical sur la massesuspendue
principe de position absolue dynamique moyenne
laser de hauteurchâssis/sol
bonne dynamique, variante en ultrasonà évaluer
cher, nécessite une acquisition hautefréquence
XYZ DGPS principe de position absolue capteur cher, fréquence faible, latencevariable, taux de couverture partiel
5ème roue permet de résoudre d’indéterminationentre la pente et l’adhérence longitudi-nale
pas réaliste de série
magnétomètre permet e résoudre l’indéterminationdévers/adhérence latérale
perturbations du champ électromagné-tique dans le véhicule
gyromètre de lacetet de roulis
principe mécanique ou optique dérive de l’intégration, même avec unemise à zéro à l’arrêt
19/43 30/09/2005Version 2.05 Efforts d’interaction pneumatiques/chaussée
5.1 Problématique
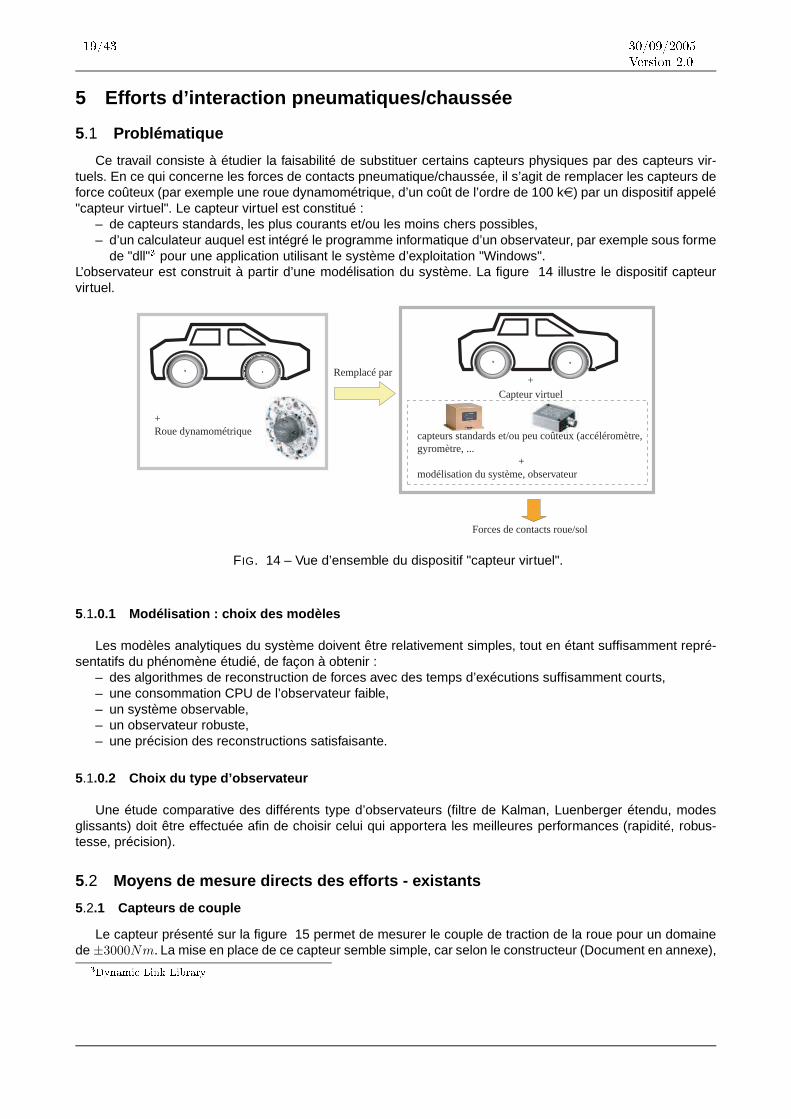
Ce travail consiste à étudier la faisabilité de substituer certains capteurs physiques par des capteurs vir-tuels. En ce qui concerne les forces de contacts pneumatique/chaussée, il s’agit de remplacer les capteurs deforce coûteux (par exemple une roue dynamométrique, d’un coût de l’ordre de 100 ke) par un dispositif appelé"capteur virtuel". Le capteur virtuel est constitué :
– de capteurs standards, les plus courants et/ou les moins chers possibles,– d’un calculateur auquel est intégré le programme informatique d’un observateur, par exemple sous forme
de "dll"3 pour une application utilisant le système d’exploitation "Windows".L’observateur est construit à partir d’une modélisation du système. La figure 14 illustre le dispositif capteurvirtuel.
+ Roue dynamométrique
Remplacé par
Forces de contacts roue/sol
Capteur virtuel
capteurs standards et/ou peu coûteux (accéléromètre, gyromètre, ... + modélisation du système, observateur
+
FIG. 14 – Vue d’ensemble du dispositif "capteur virtuel".
5.1.0.1 Modélisation : choix des modèles
Les modèles analytiques du système doivent être relativement simples, tout en étant suffisamment repré-sentatifs du phénomène étudié, de façon à obtenir :
– des algorithmes de reconstruction de forces avec des temps d’exécutions suffisamment courts,– une consommation CPU de l’observateur faible,– un système observable,– un observateur robuste,– une précision des reconstructions satisfaisante.
5.1.0.2 Choix du type d’observateur
Une étude comparative des différents type d’observateurs (filtre de Kalman, Luenberger étendu, modesglissants) doit être effectuée afin de choisir celui qui apportera les meilleures performances (rapidité, robus-tesse, précision).
5.2 Moyens de mesure directs des efforts - existants
5.2.1 Capteurs de couple
Le capteur présenté sur la figure 15 permet de mesurer le couple de traction de la roue pour un domainede ±3000Nm. La mise en place de ce capteur semble simple, car selon le constructeur (Document en annexe),3Dynami Link Library
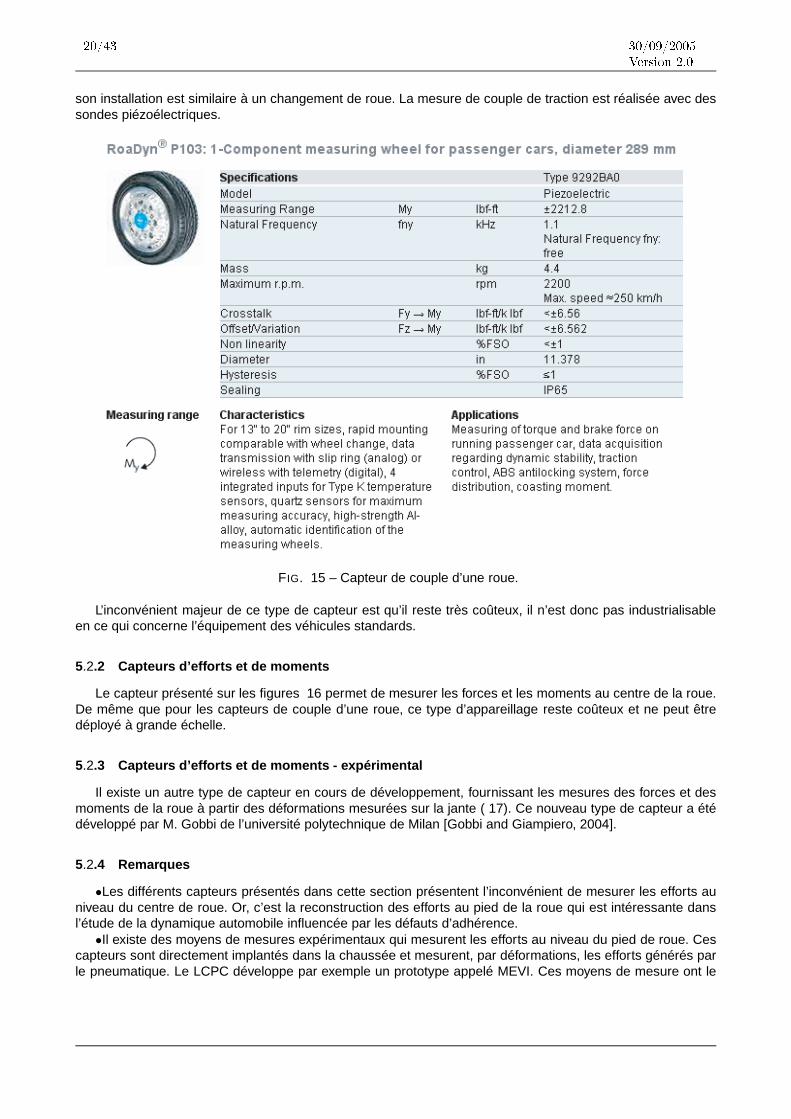
20/43 30/09/2005Version 2.0son installation est similaire à un changement de roue. La mesure de couple de traction est réalisée avec dessondes piézoélectriques.
FIG. 15 – Capteur de couple d’une roue.
L’inconvénient majeur de ce type de capteur est qu’il reste très coûteux, il n’est donc pas industrialisableen ce qui concerne l’équipement des véhicules standards.
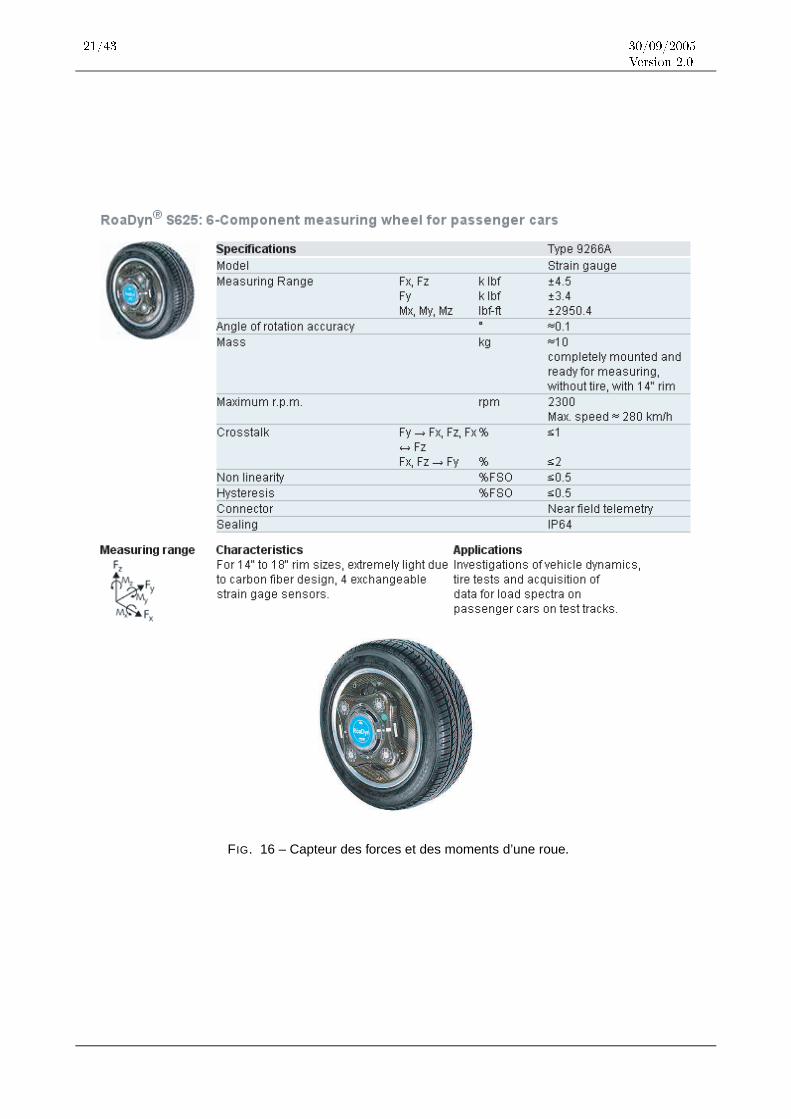
5.2.2 Capteurs d’efforts et de moments
Le capteur présenté sur les figures 16 permet de mesurer les forces et les moments au centre de la roue.De même que pour les capteurs de couple d’une roue, ce type d’appareillage reste coûteux et ne peut êtredéployé à grande échelle.
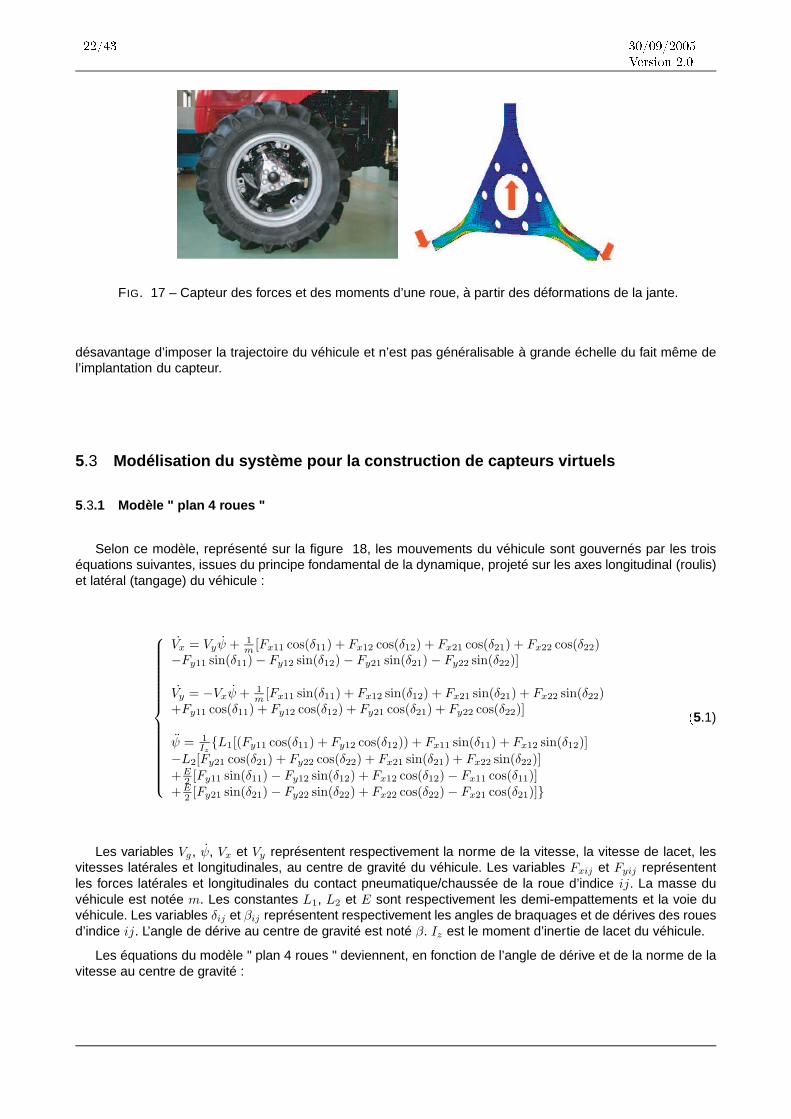
5.2.3 Capteurs d’efforts et de moments - expérimental
Il existe un autre type de capteur en cours de développement, fournissant les mesures des forces et desmoments de la roue à partir des déformations mesurées sur la jante ( 17). Ce nouveau type de capteur a étédéveloppé par M. Gobbi de l’université polytechnique de Milan [Gobbi and Giampiero, 2004].
5.2.4 Remarques
•Les différents capteurs présentés dans cette section présentent l’inconvénient de mesurer les efforts auniveau du centre de roue. Or, c’est la reconstruction des efforts au pied de la roue qui est intéressante dansl’étude de la dynamique automobile influencée par les défauts d’adhérence.
•Il existe des moyens de mesures expérimentaux qui mesurent les efforts au niveau du pied de roue. Cescapteurs sont directement implantés dans la chaussée et mesurent, par déformations, les efforts générés parle pneumatique. Le LCPC développe par exemple un prototype appelé MEVI. Ces moyens de mesure ont le
21/43 30/09/2005Version 2.0
FIG. 16 – Capteur des forces et des moments d’une roue.
22/43 30/09/2005Version 2.0
FIG. 17 – Capteur des forces et des moments d’une roue, à partir des déformations de la jante.
désavantage d’imposer la trajectoire du véhicule et n’est pas généralisable à grande échelle du fait même del’implantation du capteur.
5.3 Modélisation du système pour la construction de capteurs vi rtuels
5.3.1 Modèle " plan 4 roues "
Selon ce modèle, représenté sur la figure 18, les mouvements du véhicule sont gouvernés par les troiséquations suivantes, issues du principe fondamental de la dynamique, projeté sur les axes longitudinal (roulis)et latéral (tangage) du véhicule :
Vx = Vyψ + 1m
[Fx11 cos(δ11) + Fx12 cos(δ12) + Fx21 cos(δ21) + Fx22 cos(δ22)−Fy11 sin(δ11) − Fy12 sin(δ12) − Fy21 sin(δ21) − Fy22 sin(δ22)]
Vy = −Vxψ + 1m
[Fx11 sin(δ11) + Fx12 sin(δ12) + Fx21 sin(δ21) + Fx22 sin(δ22)+Fy11 cos(δ11) + Fy12 cos(δ12) + Fy21 cos(δ21) + Fy22 cos(δ22)]
ψ = 1Iz{L1[(Fy11 cos(δ11) + Fy12 cos(δ12)) + Fx11 sin(δ11) + Fx12 sin(δ12)]
−L2[Fy21 cos(δ21) + Fy22 cos(δ22) + Fx21 sin(δ21) + Fx22 sin(δ22)]+E
2 [Fy11 sin(δ11) − Fy12 sin(δ12) + Fx12 cos(δ12) − Fx11 cos(δ11)]+E
2 [Fy21 sin(δ21) − Fy22 sin(δ22) + Fx22 cos(δ22) − Fx21 cos(δ21)]}
(5.1)
Les variables Vg , ψ, Vx et Vy représentent respectivement la norme de la vitesse, la vitesse de lacet, lesvitesses latérales et longitudinales, au centre de gravité du véhicule. Les variables Fxij et Fyij représententles forces latérales et longitudinales du contact pneumatique/chaussée de la roue d’indice ij. La masse duvéhicule est notée m. Les constantes L1, L2 et E sont respectivement les demi-empattements et la voie duvéhicule. Les variables δij et βij représentent respectivement les angles de braquages et de dérives des rouesd’indice ij. L’angle de dérive au centre de gravité est noté β. Iz est le moment d’inertie de lacet du véhicule.
Les équations du modèle " plan 4 roues " deviennent, en fonction de l’angle de dérive et de la norme de lavitesse au centre de gravité :

23/43 30/09/2005Version 2.0ψ Vg
β E
L2 L1
β21
Fy21
δ21
FX21
β22
Fy22
δ22
FX22
β12Fy12
δ12
FX12
β11
Fy11 δ11
FX11
FIG. 18 – Le modèle "plan 4 roues".
β = 1mVg
[(−Fx11 sin(β − δ11) + Fy11 cos(β − δ11)) + (−Fx12 sin(β − δ12) + Fy12 cos(β − δ12))+
(−Fx21 sin(β − δ21) + Fy21 cos(β − δ21)) + (−Fx22 sin(β − δ22) + Fy22 cos(β − δ22)) − ψ
Vg = 1m
[(Fx11 cos(β − δ11) + Fy11 sin(β − δ11)) + (Fx12 cos(β − δ12) + Fy12 sin(β − δ12))+(Fx21 cos(β − δ21) + Fy21 sin(β − δ21)) + (Fx22 cos(β − δ22) + Fy22 sin(β − δ22))+]
ψ = 1Iz{L1[(Fy11 cos(δ11) + Fy12 cos(δ12)) + Fx11 sin(δ11) + Fx12 sin(δ12)]
−L2[Fy21 cos(δ21) + Fy22 cos(δ22) + Fx21 sin(δ21) + Fx22 sin(δ22)]+E
2 [Fy11 sin(δ11) − Fy12 sin(δ12) + Fx12 cos(δ12) − Fx11 cos(δ11)]+E
2 [Fy21 sin(δ21) − Fy22 sin(δ22) + Fx22 cos(δ22) − Fx21 cos(δ21)]}
(5.2)
5.3.2 Modèle de type bicyclette
Le modèle bicyclette est une simplification du modèle "plan 4 roues", les deux roues d’un même essieuétant réduites à une seule roue, dite roue virtuelle (figure 19). Pour retrouver les équations du modèle bicy-clette à partir de celles du modèle "plan 4 roues", il suffit d’appliquer les simplifications suivantes au systèmed’équations (5.1) :
– les angles de braquages des roues avant sont identiques (δ = δ11 = δ12), ceux des roues arrières sontnuls (δ21 = δ22 = 0),
– les actions exercées sur les roues virtuelles sont les sommes de celles qui agissent sur les roues del’essieu correspondant, de telles sortes que Fx11 + Fx12 = Fx1, Fy11 + Fy12 = Fy1, Fx21 + Fx22 = Fx2,Fy21 + Fy22 = Fy2,
– les voies sont supposées nulles, E1 = E2 = 0.Ce modèle ne tient pas compte des dynamiques de tangage et de roulis. Les équations dynamiques du
modèle bicyclette sont les suivantes :
Vx = 1m
[Fx1 cos(δ) − Fy1 sin(δ) + Fx2] + Vyψ
Vy = 1m
[Fy1 cos(δ) + Fx1 sin(δ) + Fy2] − Vxψ
ψ = 1Iz
[L1(Fy1 cos(δ) + Fx1 sin(δ)) − L2Fy2]
(5.3)
ou encore, sous une autre forme, en fonction de l’angle de dérive et de la norme de la vitesse :
β = 1mVg
[Fx1 sin(δ − β) + Fy1 cos(δ − β) − Fx2 sin(β) + Fy2 cos(β)] − ψ
Vg = 1m
[Fx1 cos(δ − β) + Fy1 sin(β − δ) + Fx2 cos(β) + Fy2 sin(β)]
ψ = 1Iz
[L1(Fy1 cos(δ) + Fx1 sin(δ)) − L2Fy2]
(5.4)

24/43 30/09/2005Version 2.0Vg
β
L2 L1
Fy2
FX2
Fy1
δ
FX1
ψ
FIG. 19 – Le modèle bicyclette.
5.3.3 Modèle de dynamique des roues
Le modèle de dynamique des roues, représenté sur la figure ( 20), permet d’établir une relation analytiqueentre le couple de la roue et la force longitudinale du contact pneumatique/chaussée. Les équations du modèle,pour une roue d’indice 11, sont les suivantes :
{m11Vr11x = Fx11Iww11 = −Rdyn11Fx11 + T11
(5.5)
Les variables Vr11x, T11, w11, Rdyn11 représentent respectivement la vitesse longitudinale, le couple, lavitesse de rotation et le rayon dynamique de la roue d’indice ij. La masse m11 est l’équivalent de la chargeappliquée à la roue ij. La constante Iw est le moment d’inertie de la roue.
δ11FX11
Vr11x
Vue de dessus Vue de côté FX11
Rdyn11W11M11
T11
FIG. 20 – Modèle dynamique de la roue d’indice 11.
5.3.4 Définitions des différents rayons de la roue
5.3.4.1 Rayon nominal
Le rayon nominal, noté R0, est le rayon de la roue lorsque celle-ci ne subit aucune contrainte.
5.3.4.2 Rayon statique
Le rayon statique, noté Rstat, est le résultat de l’application d’une force verticale Fz sur une roue dont lecoefficient de raideur verticale est Kz. Ceci est illustré par la figure ( 21) et l’expression suivante :
Rstat = R0 −Fz
Kz
(5.6)
5.3.4.3 Rayon dynamique
Le rayon dynamique, ou rayon effectif, correspond au rapport de la vitesse Vroue d’un point de la circonfé-rence du pneumatique sur la vitesse de rotation de la roue :
Rdyn =Vroue
W(5.7)

25/43 30/09/2005Version 2.0FZ
Surface de la route
Rstat
lθ
θKz
R0 W
FIG. 21 – Rayon nominal, statique et dynamique
Le rayon dynamique peut aussi être calculé à partir du rayon nominal et du rayon statique. Pour formulerceci, on utilise les variables géométriques de la figure ( 21), de la façon suivante :
Vroue =lθ
tW =
θ
t(5.8)
on déduit des équations 5.7 et 5.8 ;
Rdyn =lθ
θ(5.9)
et à partir des relations géométriques ;
Rstat = R0 cos(θ) lθ = R0 sin(θ) (5.10)
on obtient finalement l’expression du rayon dynamique suivante :
Rdyn = R0
sin[arccos(Rstat
R0)]
arccos(Rstat
R0)
(5.11)
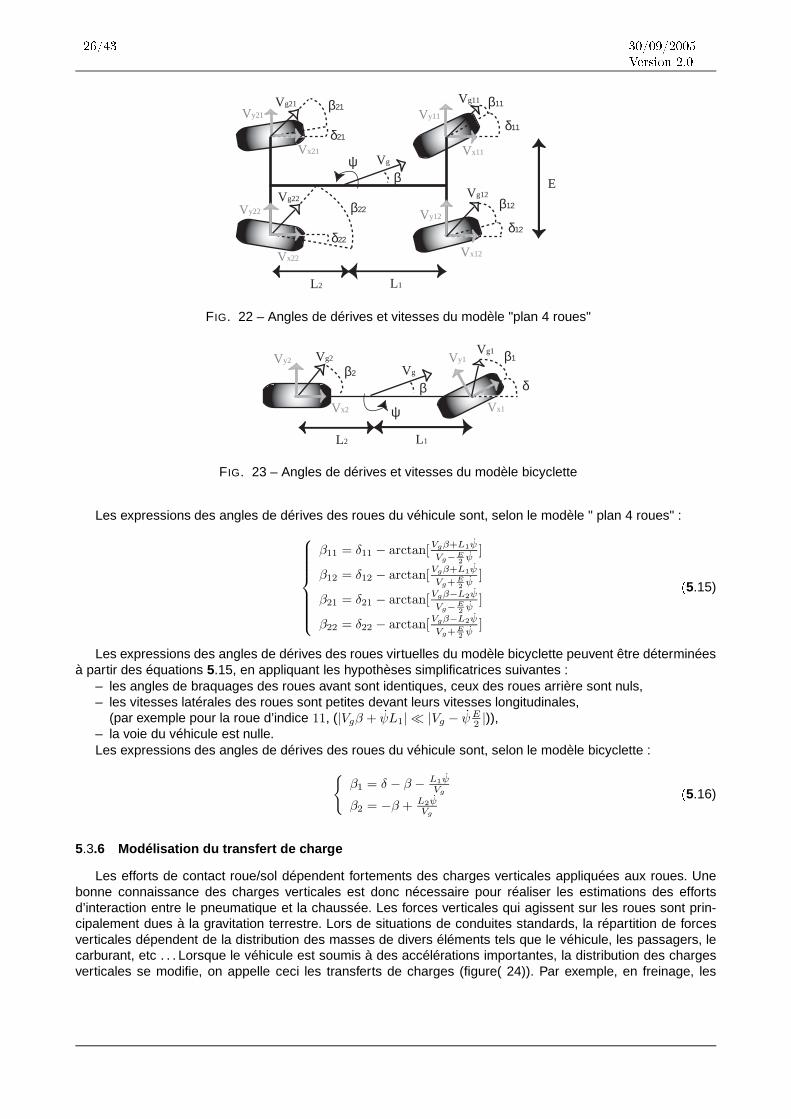
5.3.5 Angles de dérives et vitesses des roues
Ce paragraphe s’attache à fournir les expressions analytiques des vitesses et des angles de dérives desroues du véhicules (en utilisant l’hypothèse de petits angles). Les notations sont représentées sur les figures22 et 23. Les vitesses des roues, selon l’axe longitudinal et l’axe latéral du châssis, sont calculées de lamanière suivantes :
Vx11 = Vg −E2 ψ Vy11 = Vgβ + L1ψ
Vx12 = Vg + E2 ψ Vy12 = Vgβ + L1ψ
Vx21 = Vg −E2 ψ Vy21 = Vgβ − L2ψ
Vx22 = Vg + E2 ψ Vy22 = Vgβ − L2ψ
(5.12)
les normes des vecteurs vitesses sont les suivantes :
Vg11 = Vg − ψ(E2 − L1β)
Vg12 = Vg + ψ(E2 + L1β)
Vg21 = Vg − ψ(E2 + L2β)
Vg22 = Vg + ψ(E2 − L2β)
(5.13)
pour le modèle bicyclette :{Vg1 = Vg + ψ(L1β)
Vg2 = Vg − ψ(L2β)(5.14)
26/43 30/09/2005Version 2.0ψ Vg
β E
L2 L1
β21Vy21
δ21
Vx21
β22Vy22
δ22
Vx22
β12Vy12
δ12
Vx12
β11Vy11
δ11
Vx11
Vg21 Vg11
Vg12Vg22
FIG. 22 – Angles de dérives et vitesses du modèle "plan 4 roues"
Vg
β
L2 L1
Vx2 ψ
Vy2
β2
β1Vy1
δ
Vg1Vg2
Vx1
FIG. 23 – Angles de dérives et vitesses du modèle bicyclette
Les expressions des angles de dérives des roues du véhicule sont, selon le modèle " plan 4 roues" :
β11 = δ11 − arctan[Vgβ+L1ψ
Vg−E2ψ
]
β12 = δ12 − arctan[Vgβ+L1ψ
Vg+ E2ψ
]
β21 = δ21 − arctan[Vgβ−L2ψ
Vg−E2ψ
]
β22 = δ22 − arctan[Vgβ−L2ψ
Vg+E2ψ
]
(5.15)
Les expressions des angles de dérives des roues virtuelles du modèle bicyclette peuvent être déterminéesà partir des équations 5.15, en appliquant les hypothèses simplificatrices suivantes :
– les angles de braquages des roues avant sont identiques, ceux des roues arrière sont nuls,– les vitesses latérales des roues sont petites devant leurs vitesses longitudinales,
(par exemple pour la roue d’indice 11, (|Vgβ + ψL1| ≪ |Vg − ψE2 |)),– la voie du véhicule est nulle.Les expressions des angles de dérives des roues du véhicule sont, selon le modèle bicyclette :
{β1 = δ − β − L1ψ
Vg
β2 = −β + L2ψVg
(5.16)
5.3.6 Modélisation du transfert de charge
Les efforts de contact roue/sol dépendent fortements des charges verticales appliquées aux roues. Unebonne connaissance des charges verticales est donc nécessaire pour réaliser les estimations des effortsd’interaction entre le pneumatique et la chaussée. Les forces verticales qui agissent sur les roues sont prin-cipalement dues à la gravitation terrestre. Lors de situations de conduites standards, la répartition de forcesverticales dépendent de la distribution des masses de divers éléments tels que le véhicule, les passagers, lecarburant, etc . . . Lorsque le véhicule est soumis à des accélérations importantes, la distribution des chargesverticales se modifie, on appelle ceci les transferts de charges (figure( 24)). Par exemple, en freinage, les
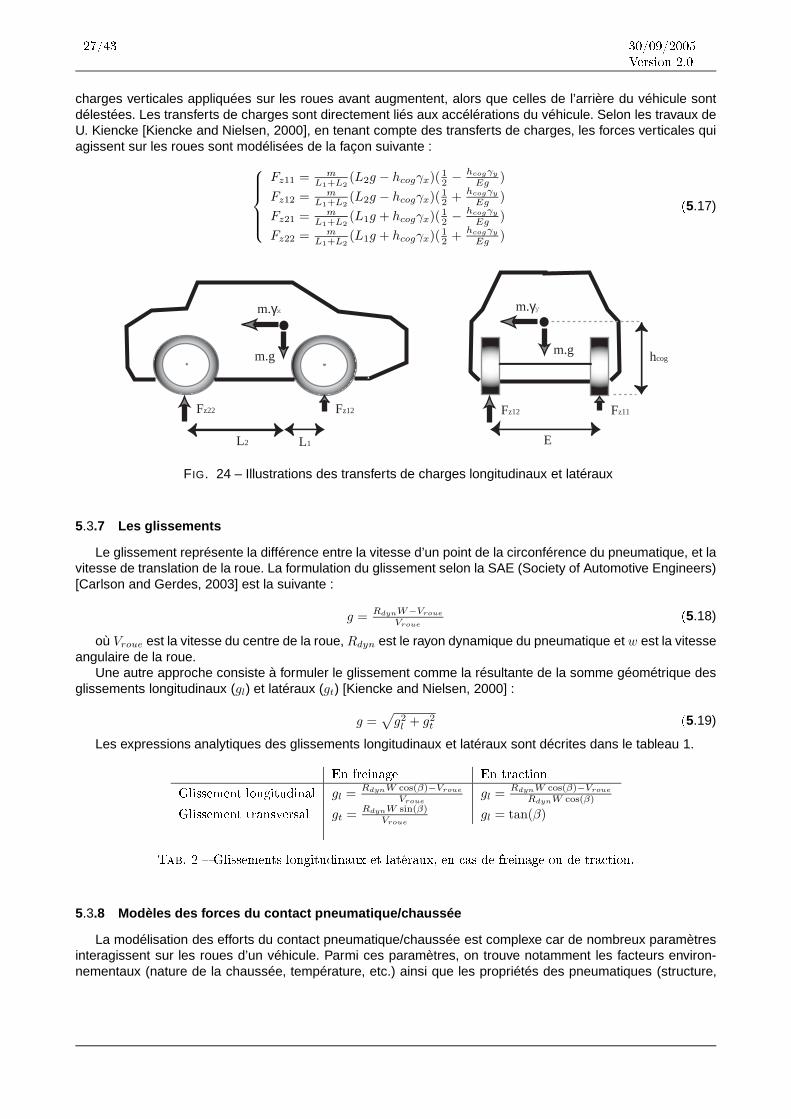
27/43 30/09/2005Version 2.0charges verticales appliquées sur les roues avant augmentent, alors que celles de l’arrière du véhicule sontdélestées. Les transferts de charges sont directement liés aux accélérations du véhicule. Selon les travaux deU. Kiencke [Kiencke and Nielsen, 2000], en tenant compte des transferts de charges, les forces verticales quiagissent sur les roues sont modélisées de la façon suivante :
Fz11 = mL1+L2
(L2g − hcogγx)(12 −
hcogγy
Eg)
Fz12 = mL1+L2
(L2g − hcogγx)(12 +
hcogγy
Eg)
Fz21 = mL1+L2
(L1g + hcogγx)(12 −
hcogγy
Eg)
Fz22 = mL1+L2
(L1g + hcogγx)(12 +
hcogγy
Eg)
(5.17)
Fz12Fz22 Fz12 Fz11
m.γx m.γy
m.g m.g
L2 L1 E
hcog
FIG. 24 – Illustrations des transferts de charges longitudinaux et latéraux
5.3.7 Les glissements
Le glissement représente la différence entre la vitesse d’un point de la circonférence du pneumatique, et lavitesse de translation de la roue. La formulation du glissement selon la SAE (Society of Automotive Engineers)[Carlson and Gerdes, 2003] est la suivante :
g =RdynW−Vroue
Vroue(5.18)
où Vroue est la vitesse du centre de la roue,Rdyn est le rayon dynamique du pneumatique et w est la vitesseangulaire de la roue.
Une autre approche consiste à formuler le glissement comme la résultante de la somme géométrique desglissements longitudinaux (gl) et latéraux (gt) [Kiencke and Nielsen, 2000] :
g =√g2l + g2
t (5.19)
Les expressions analytiques des glissements longitudinaux et latéraux sont décrites dans le tableau 1.En freinage En tra tionGlissement longitudinal gl =RdynW cos(β)−Vroue
Vrouegl =
RdynW cos(β)−Vroue
RdynW cos(β)Glissement transversal gt =RdynW sin(β)
Vrouegl = tan(β)Tab. 2 � Glissements longitudinaux et latéraux, en as de freinage ou de tra tion.
5.3.8 Modèles des forces du contact pneumatique/chaussée
La modélisation des efforts du contact pneumatique/chaussée est complexe car de nombreux paramètresinteragissent sur les roues d’un véhicule. Parmi ces paramètres, on trouve notamment les facteurs environ-nementaux (nature de la chaussée, température, etc.) ainsi que les propriétés des pneumatiques (structure,
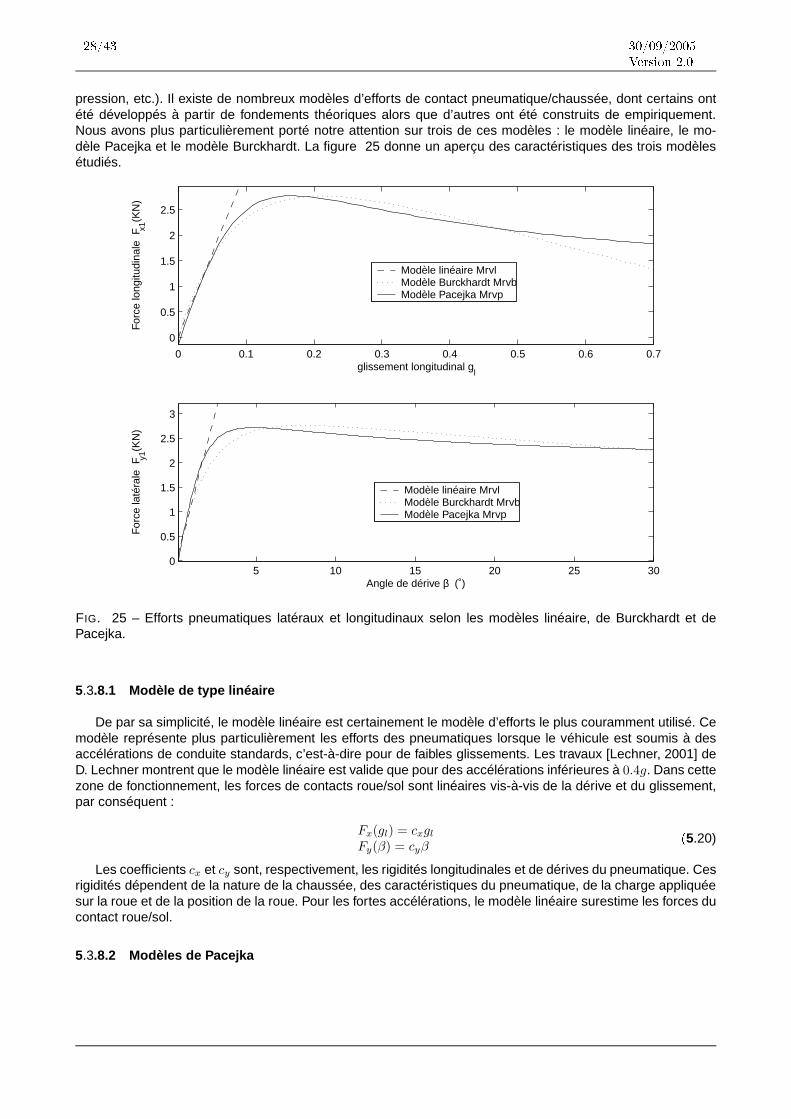
28/43 30/09/2005Version 2.0pression, etc.). Il existe de nombreux modèles d’efforts de contact pneumatique/chaussée, dont certains ontété développés à partir de fondements théoriques alors que d’autres ont été construits de empiriquement.Nous avons plus particulièrement porté notre attention sur trois de ces modèles : le modèle linéaire, le mo-dèle Pacejka et le modèle Burckhardt. La figure 25 donne un aperçu des caractéristiques des trois modèlesétudiés.
5 10 15 20 25 30 0
0.5
1
1.5
2
2.5
3
Angle de dérive β (˚)
For
ce la
téra
le F
y1 (K
N)
Modèle linéaire Mrvl Modèle Burckhardt Mrvb Modèle Pacejka Mrvp
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0
0.5
1
1.5
2
2.5
glissement longitudinal g l
For
ce lo
ngitu
dina
le F
x1 (K
N)
Modèle linéaire Mrvl Modèle Burckhardt Mrvb Modèle Pacejka Mrvp
FIG. 25 – Efforts pneumatiques latéraux et longitudinaux selon les modèles linéaire, de Burckhardt et dePacejka.
5.3.8.1 Modèle de type linéaire
De par sa simplicité, le modèle linéaire est certainement le modèle d’efforts le plus couramment utilisé. Cemodèle représente plus particulièrement les efforts des pneumatiques lorsque le véhicule est soumis à desaccélérations de conduite standards, c’est-à-dire pour de faibles glissements. Les travaux [Lechner, 2001] deD. Lechner montrent que le modèle linéaire est valide que pour des accélérations inférieures à 0.4g. Dans cettezone de fonctionnement, les forces de contacts roue/sol sont linéaires vis-à-vis de la dérive et du glissement,par conséquent :
Fx(gl) = cxglFy(β) = cyβ
(5.20)
Les coefficients cx et cy sont, respectivement, les rigidités longitudinales et de dérives du pneumatique. Cesrigidités dépendent de la nature de la chaussée, des caractéristiques du pneumatique, de la charge appliquéesur la roue et de la position de la roue. Pour les fortes accélérations, le modèle linéaire surestime les forces ducontact roue/sol.
5.3.8.2 Modèles de Pacejka

29/43 30/09/2005Version 2.0Les modèles proposés par H.B Pacejka dans les années 1980 [Pacejka, 1981] sont issus d’identifications
des paramètres de courbes à partir de relevés expérimentaux. Ces modèles permettent de décrire les effortslongitudinaux, les efforts transversaux et le moment d’auto-alignement (MAA) de la façon suivante :
Fx(gl + Shx) = Dx sin[Cx arctan(Bxgl − Ex(Bxgl − arctan(Bxgl)))] + Svx
Fy(β + Shy) = Dy sin[Cy arctan(Byβ − Ey(Byβ − arctan(Byβ)))] + Svy
Mz(β + Shz) = Dz sin[Cz arctan(Bzβ − Ez(Bzβ − arctan(Bzβ)))] + Svz
(5.21)
Les coefficients Dx,y,z représentent les valeurs maximales des courbes. Les coefficients Bx,y,z et Cx,y,zpermettent d’ajuster les pentes aux origines et l’allure des courbes. Les coefficients Ex,y,z permettent uncontrôle des abscisses (angle de dérive, glissement longitudinal) pour lesquelles les valeurs maximales descourbes sont atteintes. Les paramètres Svx,y,z et Shx,y,z permettent d’appliquer des offsets sur l’effort latéral,longitudinal, le moment d’auto-alignement, l’angle de dérive et le glissement longitudinal.
Afin de prendre en compte les effets des variations de charges Fz et du carrossage c sur les efforts et leMAA, H.B Pacejka et Bakker [Pacejka and Bakker, 1991] modifient les paramètres des modèles de la manièresuivante :
– pour les efforts longitudinaux :
Dx = Fz(b1Fz + b2)Bx = 1
CxDx(b3Fz + b4)Fz exp(−b5Fz)
Cx = 1.65Ex = (b6F
2z + b7Fz + b8)(1 − b9sign(gl + Shx))
Shx = b10Fz + b11Svx = b12Fz + b13
(5.22)
– pour les efforts transversaux :
Dy = Fz(a1Fz + a2)(1 − a3c2)
By = 1CyDy
a4 sin(2 arctan(Fz
a5
)(1 − a6‖c‖))
Cy = 1.3Ey = (a7Fz + a8)(1 − (a9c+ a10sign(β + Shy)))Shy = a11Fz + a12 + a13c
Svy = a14Fz + a15 + c(a16F2z + a17Fz)
(5.23)
– pour le moment d’auto-alignement :
Dz = Fz(c1Fz + c2)Bz = − 1
CzDzc12‖c‖(c3F
2z + c4Fz) exp(−c5Fz)
Cz = 2.4Ez = −c12‖c‖(c6F
2z + c7Fz + c8)
Shz = c9c
Svz = (c10F2z + c11Fz)‖c‖
(5.24)
Les paramètres ai, bj, ck, sont déterminés à partir d’identifications de courbes expérimentales. Ils dé-pendent des conditions environnementales (type revêtement, état de la chaussée, ...) ainsi que du pneuma-tique utilisé (structure, pression de gonflage,...).
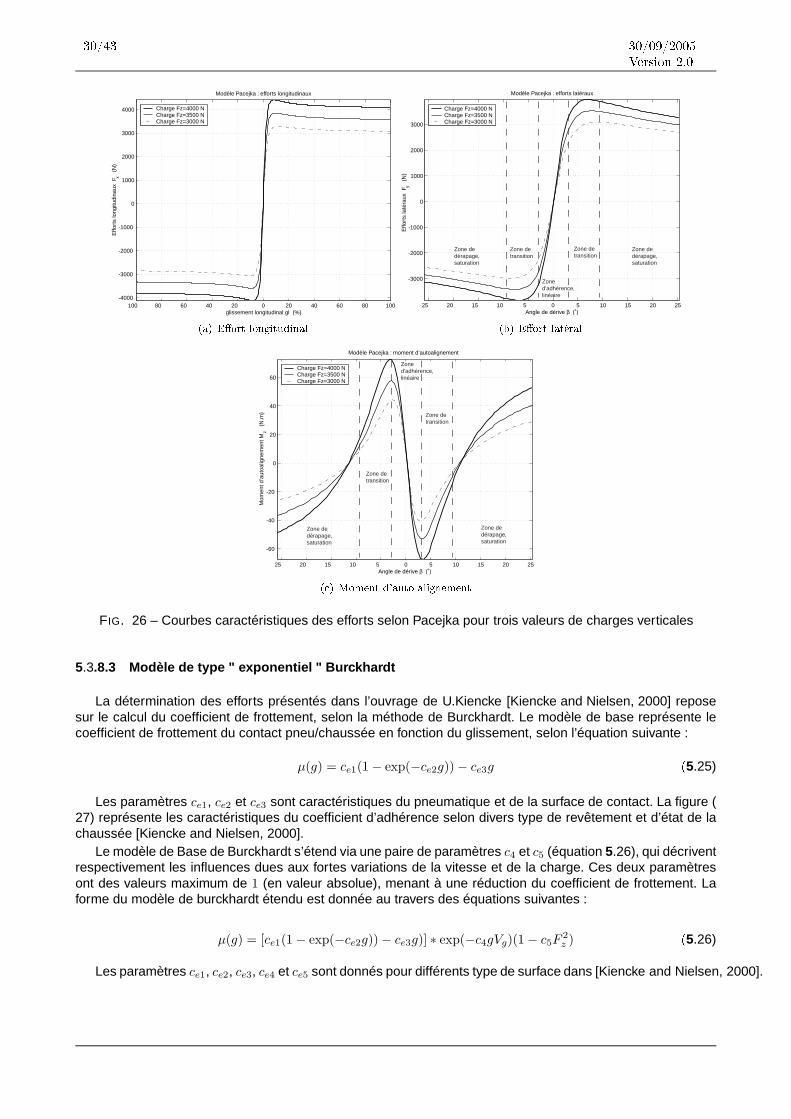
Des représentations des courbes d’efforts du modèle Pacejka sont présentées sur les figures 26(a), 26(b)et 26(c), en fonction de plusieurs charges. L’analyse des courbes des efforts latéraux révèlent trois zones.La première, dite zone d’adhérence, reflète du comportement dynamique linéaire des pneumatiques vis à visde l’angle de dérive. Dans la deuxième zone, transitoire, les efforts continuent d’augmenter avec l’angle, maisdans des proportions moindres car les glissements se deviennent de plus en plus importants. Et enfin, dansla troisième zone, le pneumatique entre dans une phase de saturation, faite de glissements et de dérapages.
On retrouve ces trois zones dans les caractéristiques du moment d’auto-alignement (figure 26(c)). Dansla zone linéaire, le moment d’auto-alignement augmente avec la dérive (en valeur absolue), puis diminue dansla zone de transition jusqu’à changer de signe à la limite de la zone de saturation, et finalement tendre verszéro pour les forts angles de dérive. Ceci n’est pas le cas sur la figure 26(c). Ce défaut du modèle Pacejkaest connu et présenté par différents auteurs [Detalle et al., 1997], [Lechner, 2001], [Stéphant, 2004].
30/43 30/09/2005Version 2.0
glissement longitudinal gl (%)
Effo
rts
long
itudi
naux
F x (
N)
Modèle Pacejka : efforts longitudinaux
100 80 60 40 20 0 20 40 60 80 100 -4000
-3000
-2000
-1000
0
1000
2000
3000
4000 Charge Fz=4000 N Charge Fz=3500 N Charge Fz=3000 N
(a) E�ort longitudinal 25 20 15 10 5 0 5 10 15 20 25
-3000
-2000
-1000
0
1000
2000
3000
Angle de dérive β (˚)
Effo
rts
laté
raux
F y (
N)
Modèle Pacejka : efforts latéraux
Charge Fz=4000 N Charge Fz=3500 N Charge Fz=3000 N
Zone d'adhérence, linéaire
Zone de transition
Zone de transition
Zone de dérapage, saturation
Zone de dérapage, saturation (b) E�ort latéral
25 20 15 10 5 0 5 10 15 20 25
-60
-40
-20
0
20
40
60
Angle de dérive β (˚)
Mom
ent d
’aut
oalig
nem
ent M
z (
N.m
)
Modèle Pacejka : moment d’autoalignement
Charge Fz=4000 N Charge Fz=3500 N Charge Fz=3000 N
Zone d'adhérence, linéaire
Zone de transition
Zone de transition
Zone de dérapage, saturation
Zone de dérapage, saturation( ) Moment d'auto-alignement
FIG. 26 – Courbes caractéristiques des efforts selon Pacejka pour trois valeurs de charges verticales
5.3.8.3 Modèle de type " exponentiel " Burckhardt
La détermination des efforts présentés dans l’ouvrage de U.Kiencke [Kiencke and Nielsen, 2000] reposesur le calcul du coefficient de frottement, selon la méthode de Burckhardt. Le modèle de base représente lecoefficient de frottement du contact pneu/chaussée en fonction du glissement, selon l’équation suivante :
µ(g) = ce1(1 − exp(−ce2g)) − ce3g (5.25)
Les paramètres ce1, ce2 et ce3 sont caractéristiques du pneumatique et de la surface de contact. La figure (27) représente les caractéristiques du coefficient d’adhérence selon divers type de revêtement et d’état de lachaussée [Kiencke and Nielsen, 2000].
Le modèle de Base de Burckhardt s’étend via une paire de paramètres c4 et c5 (équation 5.26), qui décriventrespectivement les influences dues aux fortes variations de la vitesse et de la charge. Ces deux paramètresont des valeurs maximum de 1 (en valeur absolue), menant à une réduction du coefficient de frottement. Laforme du modèle de burckhardt étendu est donnée au travers des équations suivantes :
µ(g) = [ce1(1 − exp(−ce2g)) − ce3g)] ∗ exp(−c4gVg)(1 − c5F2z ) (5.26)
Les paramètres ce1, ce2, ce3, ce4 et ce5 sont donnés pour différents type de surface dans [Kiencke and Nielsen, 2000].
31/43 30/09/2005Version 2.0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
glissement
coef
ficie
nt d
’adh
éren
ce
Asphalt, secAsphalt, humideBeton, secPavés, secPavés, humideNeigeGlace
FIG. 27 – Coefficient d’adhérence pour divers type de surface
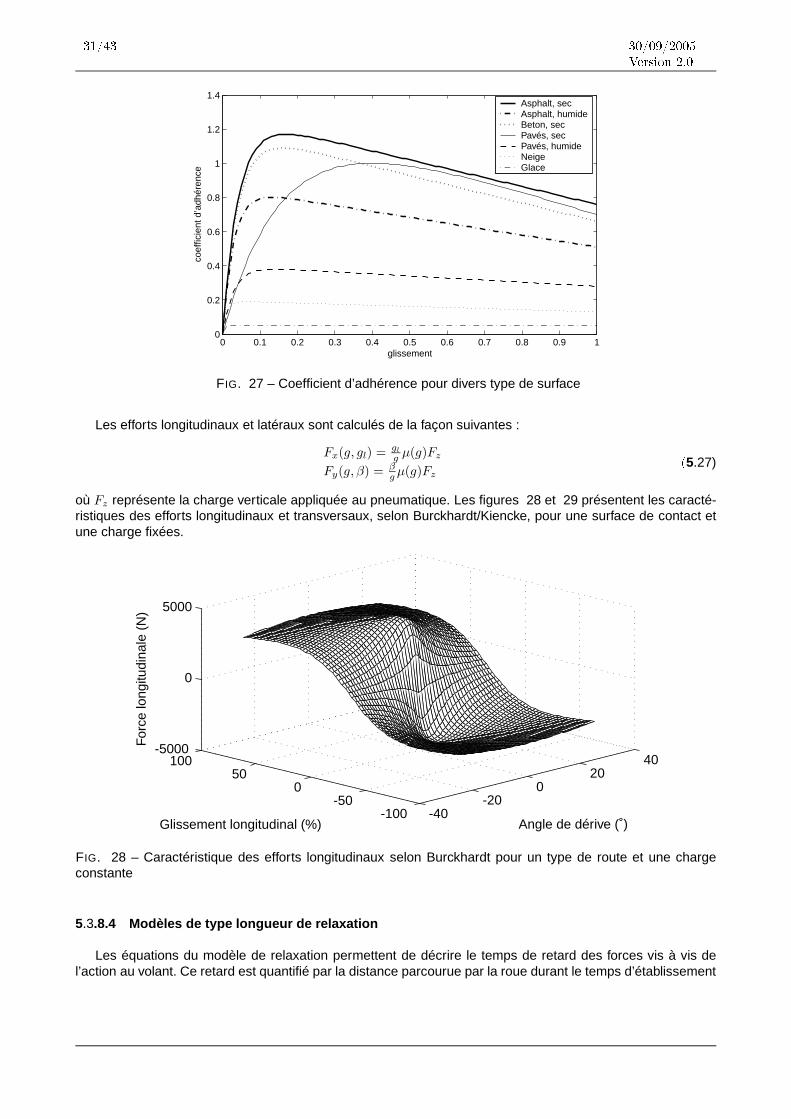
Les efforts longitudinaux et latéraux sont calculés de la façon suivantes :
Fx(g, gl) = gl
gµ(g)Fz
Fy(g, β) = βgµ(g)Fz
(5.27)
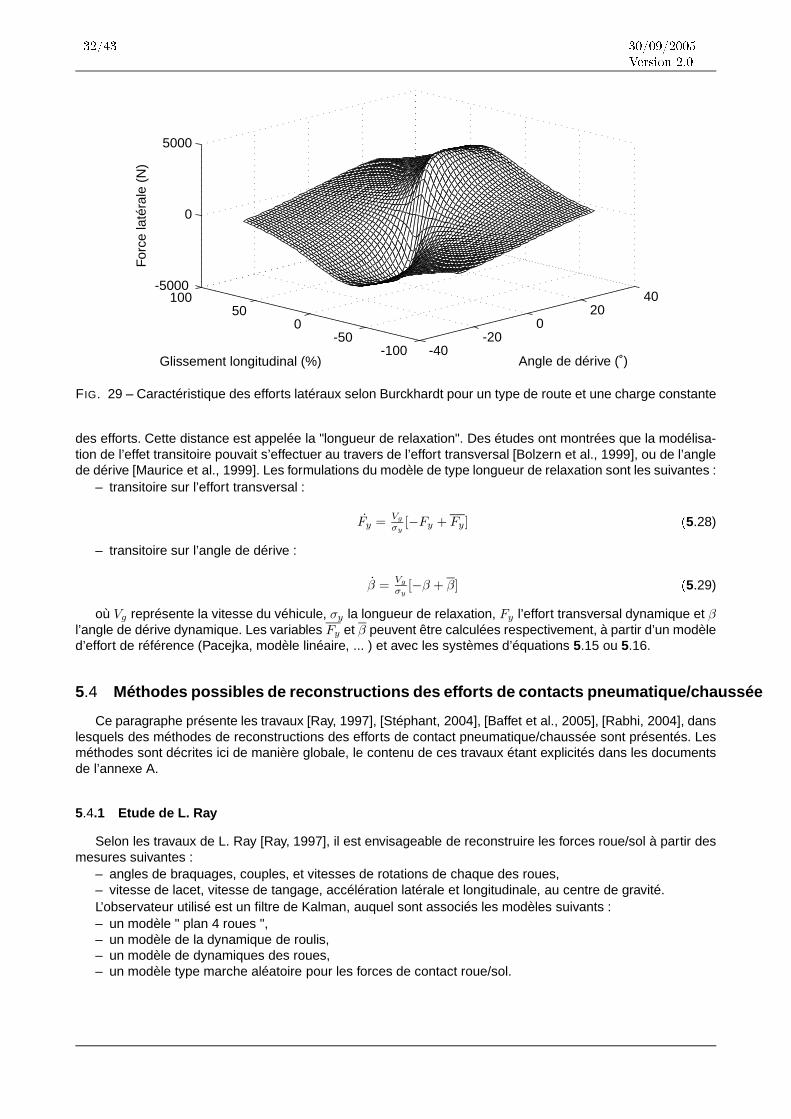
où Fz représente la charge verticale appliquée au pneumatique. Les figures 28 et 29 présentent les caracté-ristiques des efforts longitudinaux et transversaux, selon Burckhardt/Kiencke, pour une surface de contact etune charge fixées.
-40 -20
0 20
40
-100 -50
0 50
100 -5000
0
5000
Angle de dérive (˚) Glissement longitudinal (%)
For
ce lo
ngitu
dina
le (
N)
FIG. 28 – Caractéristique des efforts longitudinaux selon Burckhardt pour un type de route et une chargeconstante
5.3.8.4 Modèles de type longueur de relaxation
Les équations du modèle de relaxation permettent de décrire le temps de retard des forces vis à vis del’action au volant. Ce retard est quantifié par la distance parcourue par la roue durant le temps d’établissement
32/43 30/09/2005Version 2.0
-40 -20
0 20
40
-100 -50
0 50
100 -5000
0
5000
Angle de dérive (˚) Glissement longitudinal (%)
For
ce la
téra
le (
N)
FIG. 29 – Caractéristique des efforts latéraux selon Burckhardt pour un type de route et une charge constante
des efforts. Cette distance est appelée la "longueur de relaxation". Des études ont montrées que la modélisa-tion de l’effet transitoire pouvait s’effectuer au travers de l’effort transversal [Bolzern et al., 1999], ou de l’anglede dérive [Maurice et al., 1999]. Les formulations du modèle de type longueur de relaxation sont les suivantes :
– transitoire sur l’effort transversal :
Fy =Vg
σy[−Fy + Fy] (5.28)
– transitoire sur l’angle de dérive :
β =Vg
σy[−β + β] (5.29)
où Vg représente la vitesse du véhicule, σy la longueur de relaxation, Fy l’effort transversal dynamique et βl’angle de dérive dynamique. Les variables Fy et β peuvent être calculées respectivement, à partir d’un modèled’effort de référence (Pacejka, modèle linéaire, ... ) et avec les systèmes d’équations 5.15 ou 5.16.
5.4 Méthodes possibles de reconstructions des efforts de conta cts pneumatique/chaussée
Ce paragraphe présente les travaux [Ray, 1997], [Stéphant, 2004], [Baffet et al., 2005], [Rabhi, 2004], danslesquels des méthodes de reconstructions des efforts de contact pneumatique/chaussée sont présentés. Lesméthodes sont décrites ici de manière globale, le contenu de ces travaux étant explicités dans les documentsde l’annexe A.
5.4.1 Etude de L. Ray
Selon les travaux de L. Ray [Ray, 1997], il est envisageable de reconstruire les forces roue/sol à partir desmesures suivantes :
– angles de braquages, couples, et vitesses de rotations de chaque des roues,– vitesse de lacet, vitesse de tangage, accélération latérale et longitudinale, au centre de gravité.L’observateur utilisé est un filtre de Kalman, auquel sont associés les modèles suivants :– un modèle " plan 4 roues ",– un modèle de la dynamique de roulis,– un modèle de dynamiques des roues,– un modèle type marche aléatoire pour les forces de contact roue/sol.
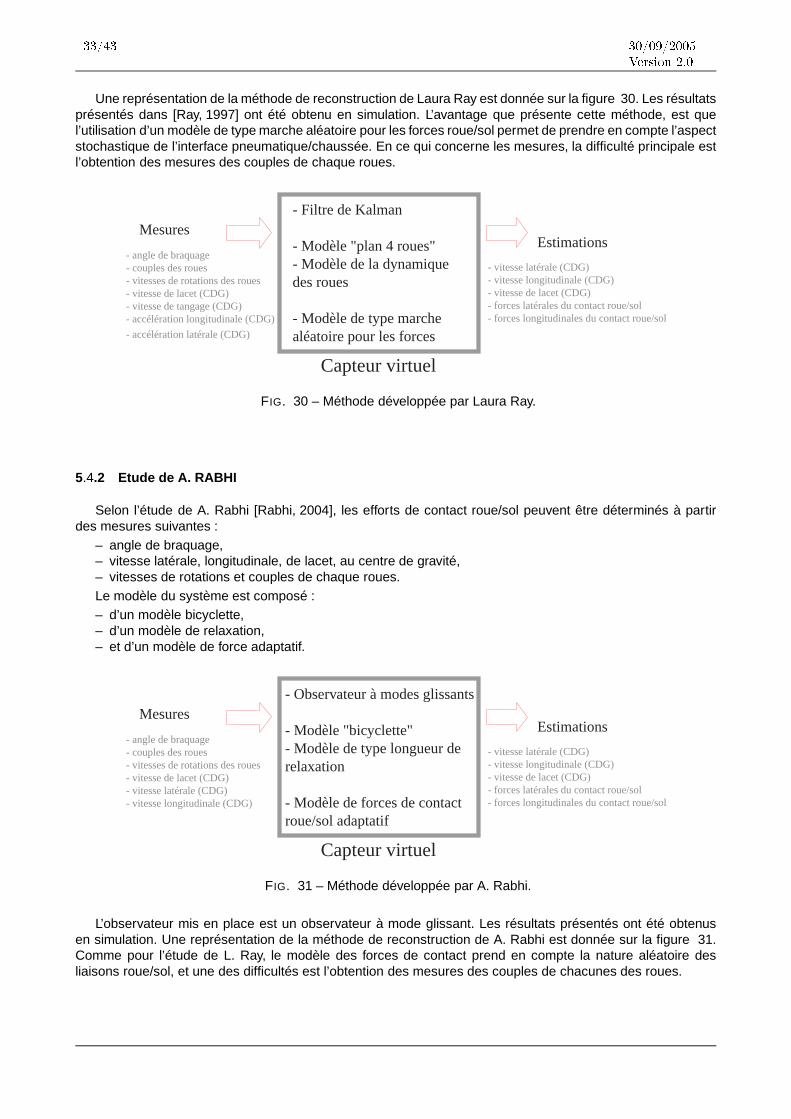
33/43 30/09/2005Version 2.0Une représentation de la méthode de reconstruction de Laura Ray est donnée sur la figure 30. Les résultats
présentés dans [Ray, 1997] ont été obtenu en simulation. L’avantage que présente cette méthode, est quel’utilisation d’un modèle de type marche aléatoire pour les forces roue/sol permet de prendre en compte l’aspectstochastique de l’interface pneumatique/chaussée. En ce qui concerne les mesures, la difficulté principale estl’obtention des mesures des couples de chaque roues.
- angle de braquage - couples des roues - vitesses de rotations des roues - vitesse de lacet (CDG) - vitesse de tangage (CDG) - accélération longitudinale (CDG)
- accélération latérale (CDG)
Mesures
- vitesse latérale (CDG) - vitesse longitudinale (CDG) - vitesse de lacet (CDG) - forces latérales du contact roue/sol - forces longitudinales du contact roue/sol
Estimations
- Filtre de Kalman - Modèle "plan 4 roues" - Modèle de la dynamique des roues - Modèle de type marche aléatoire pour les forces
Capteur virtuel
FIG. 30 – Méthode développée par Laura Ray.
5.4.2 Etude de A. RABHI
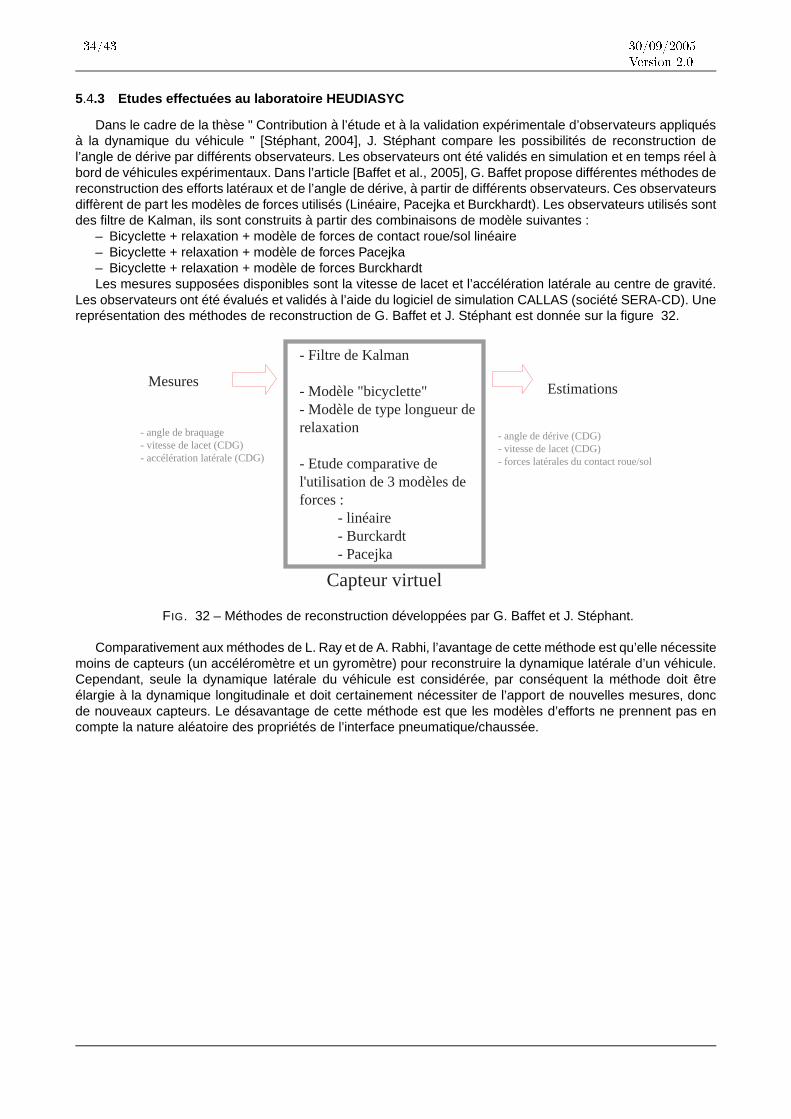
Selon l’étude de A. Rabhi [Rabhi, 2004], les efforts de contact roue/sol peuvent être déterminés à partirdes mesures suivantes :
– angle de braquage,– vitesse latérale, longitudinale, de lacet, au centre de gravité,– vitesses de rotations et couples de chaque roues.Le modèle du système est composé :– d’un modèle bicyclette,– d’un modèle de relaxation,– et d’un modèle de force adaptatif.
- angle de braquage - couples des roues - vitesses de rotations des roues - vitesse de lacet (CDG) - vitesse latérale (CDG) - vitesse longitudinale (CDG)
Mesures
- vitesse latérale (CDG) - vitesse longitudinale (CDG) - vitesse de lacet (CDG) - forces latérales du contact roue/sol - forces longitudinales du contact roue/sol
Estimations
- Observateur à modes glissants - Modèle "bicyclette" - Modèle de type longueur de relaxation - Modèle de forces de contact roue/sol adaptatif
Capteur virtuel
FIG. 31 – Méthode développée par A. Rabhi.
L’observateur mis en place est un observateur à mode glissant. Les résultats présentés ont été obtenusen simulation. Une représentation de la méthode de reconstruction de A. Rabhi est donnée sur la figure 31.Comme pour l’étude de L. Ray, le modèle des forces de contact prend en compte la nature aléatoire desliaisons roue/sol, et une des difficultés est l’obtention des mesures des couples de chacunes des roues.
34/43 30/09/2005Version 2.05.4.3 Etudes effectuées au laboratoire HEUDIASYC
Dans le cadre de la thèse " Contribution à l’étude et à la validation expérimentale d’observateurs appliquésà la dynamique du véhicule " [Stéphant, 2004], J. Stéphant compare les possibilités de reconstruction del’angle de dérive par différents observateurs. Les observateurs ont été validés en simulation et en temps réel àbord de véhicules expérimentaux. Dans l’article [Baffet et al., 2005], G. Baffet propose différentes méthodes dereconstruction des efforts latéraux et de l’angle de dérive, à partir de différents observateurs. Ces observateursdiffèrent de part les modèles de forces utilisés (Linéaire, Pacejka et Burckhardt). Les observateurs utilisés sontdes filtre de Kalman, ils sont construits à partir des combinaisons de modèle suivantes :
– Bicyclette + relaxation + modèle de forces de contact roue/sol linéaire– Bicyclette + relaxation + modèle de forces Pacejka– Bicyclette + relaxation + modèle de forces BurckhardtLes mesures supposées disponibles sont la vitesse de lacet et l’accélération latérale au centre de gravité.
Les observateurs ont été évalués et validés à l’aide du logiciel de simulation CALLAS (société SERA-CD). Unereprésentation des méthodes de reconstruction de G. Baffet et J. Stéphant est donnée sur la figure 32.
- angle de braquage - vitesse de lacet (CDG) - accélération latérale (CDG)
Mesures
- angle de dérive (CDG) - vitesse de lacet (CDG) - forces latérales du contact roue/sol
Estimations
- Filtre de Kalman - Modèle "bicyclette" - Modèle de type longueur de relaxation - Etude comparative de l'utilisation de 3 modèles de forces : - linéaire - Burckardt - Pacejka
Capteur virtuel
FIG. 32 – Méthodes de reconstruction développées par G. Baffet et J. Stéphant.
Comparativement aux méthodes de L. Ray et de A. Rabhi, l’avantage de cette méthode est qu’elle nécessitemoins de capteurs (un accéléromètre et un gyromètre) pour reconstruire la dynamique latérale d’un véhicule.Cependant, seule la dynamique latérale du véhicule est considérée, par conséquent la méthode doit êtreélargie à la dynamique longitudinale et doit certainement nécessiter de l’apport de nouvelles mesures, doncde nouveaux capteurs. Le désavantage de cette méthode est que les modèles d’efforts ne prennent pas encompte la nature aléatoire des propriétés de l’interface pneumatique/chaussée.
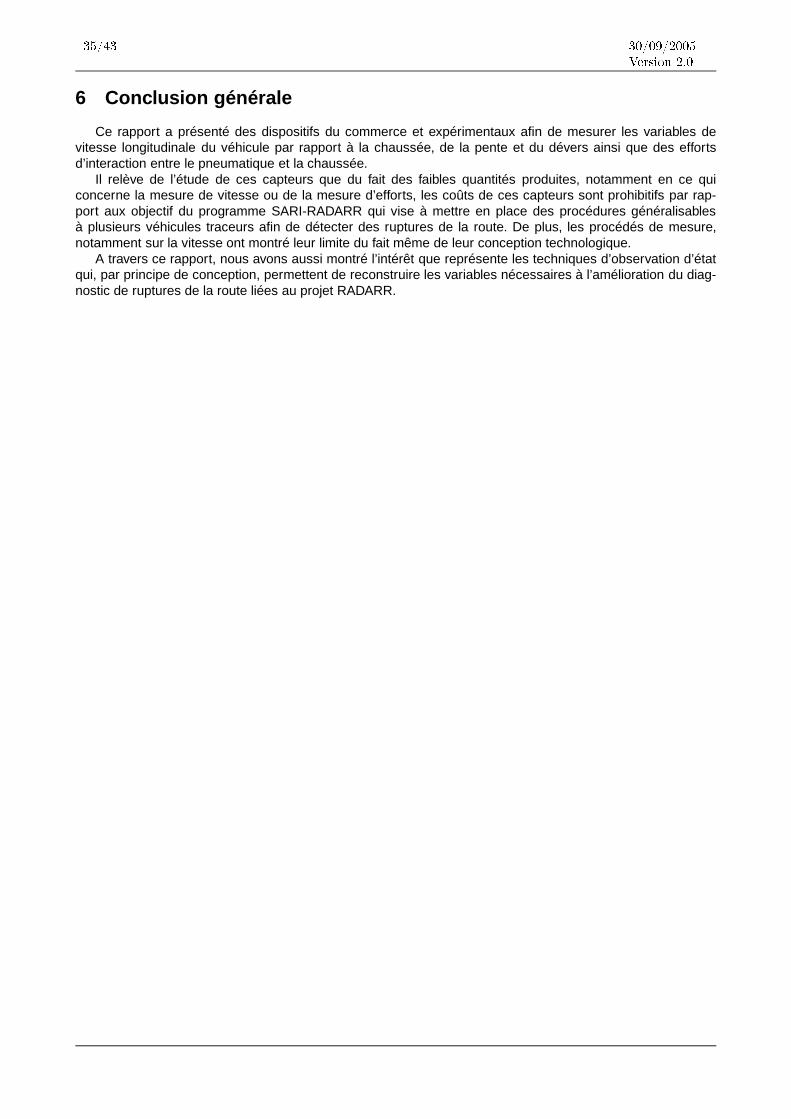
35/43 30/09/2005Version 2.06 Conclusion générale
Ce rapport a présenté des dispositifs du commerce et expérimentaux afin de mesurer les variables devitesse longitudinale du véhicule par rapport à la chaussée, de la pente et du dévers ainsi que des effortsd’interaction entre le pneumatique et la chaussée.
Il relève de l’étude de ces capteurs que du fait des faibles quantités produites, notamment en ce quiconcerne la mesure de vitesse ou de la mesure d’efforts, les coûts de ces capteurs sont prohibitifs par rap-port aux objectif du programme SARI-RADARR qui vise à mettre en place des procédures généralisablesà plusieurs véhicules traceurs afin de détecter des ruptures de la route. De plus, les procédés de mesure,notamment sur la vitesse ont montré leur limite du fait même de leur conception technologique.
A travers ce rapport, nous avons aussi montré l’intérêt que représente les techniques d’observation d’étatqui, par principe de conception, permettent de reconstruire les variables nécessaires à l’amélioration du diag-nostic de ruptures de la route liées au projet RADARR.
36/43 30/09/2005Version 2.0Références
[Baffet et al., 2005] Baffet, G., Stéphant, J., and Charara, A. (2005). "evaluation d’observateurs pour l’estima-tion des efforts latéraux et de la déerive d’un véhicule". Proc. Journées Doctorales et Nationales du GDRMACS - Lyon - France.
[Bolzern et al., 1999] Bolzern, P., Cheli, F., Falciola, G., and Resta, F. (1999). Estimation of the non-linearsuspension tyre cornering forces from experimental road test data. Vehicle system dynamics, 31 :23–34.
[Carlson and Gerdes, 2003] Carlson, C. R. and Gerdes, J. C. (2003). "nonlinear estimation of longitudinal tireslip under several driving conditions". Proc of the American Control Conference, ACC 2003, Denver, usa.
[Chapuis et al., 2002] Chapuis, R., Laneurit, J., Aufrere, Romuald andChausse, F., and Chateau, T. (2002).Accurate vision based road tracker. In Proc. IEEE Intelligent Vehicles Symposium (IV2002), Versailles,France.
[Detalle et al., 1997] Detalle, S., J., F., and Gailliegue, F. (1997). A tyre model for interactive driving simulators.Vehicle system dynamics, Supplement 27, 27 :326–329.
[Gobbi and Giampiero, 2004] Gobbi, M. and Giampiero, M. (2004). Wheels with integrated sensors for mea-suring tyre forces and moments. In Proc. Advanced Vehicle Control (AVEC2004), Arnhem, The Nederlands.
[Hahn et al., 2002] Hahn, J.-O., Rajamani, R., and Alexander, L. (2002). "gps-based real-time identification oftire-road friction coefficient". IEEE transaction on control systems technolgy, 10(3) :331–343.
[Hiemer, 2004] Hiemer, M. (2004). Model based detection and reconstruction of road traffic accidents. PhDthesis, universitätsverlag Karlsruhe.
[Jiang, 2000] Jiang, F. (2000). A novel feedback control approach to a class of antilock brake problems. PhDthesis, Cleveland State University, May.
[Jiang and Zhiqiang, 2000] Jiang, F. and Zhiqiang, G. (2000). An adaptative nonlinear filter approach to vehiclevelocity estimation for abs. In Proc. IEEE International Conference on Control Applications/Computer AidedControl System Design (CCA/CACSD2000), Alaska, USA, September 2000.
[Kiencke and Nielsen, 2000] Kiencke, U. and Nielsen, L. (2000). Automotive control system. Springer.
[Lechner, 2001] Lechner, D. (2001). Analyse du comportement dynamique des véhicules routiers légers :développement d’une méthodologie appliquée à la sécurité primaire. PhD thesis, École centrale de Lyon.
[Ltd, 2004] Ltd, R. M. E. (2004). Speed sensor comparison testing. Technical report, Rob Marshall EngineeringLtd.
[Luenberger, 1964] Luenberger, D. (1964). Observating the state of linear system. IEEE Trans on Mil. Elektron,6 :74–80.
[Luenberger, 1966] Luenberger, D. (1966). Observers for multivariable systems. IEEE Trans on Automaticcontrol, 11(2) :190–197.
[Luenberger, 1971] Luenberger, D. (1971). An introduction to observers. IEEE Trans on Automatic control,16(6) :596–602.
[Massel and Eve, 2004] Massel, T. and Eve, D. (2004). Observer design for estimating the vehicle inclinationangle. In Proc. Advanced Vehicle Control Symposium (AVEC04), Arnhem, the Netherlands.
[Maurice et al., 1999] Maurice, J., Berzeri, M., and Pacejka, H. (1999). "pragmatic tyre model for short wave-length side slip variations". Vehicle system dynamics 31, pages 65–94.
[Mohinder and Angus, 1993] Mohinder, S. G. and Angus, P. A. (1993). Kalman filtering theory and practice.Prentice hall.
[Pacejka, 1981] Pacejka, H. (1981). Analysis of tire properties, chapter 9, pages 721–870. Clark, S.K. Mecha-nics of pneumatic tires, DOT-HS805952.
[Pacejka and Bakker, 1991] Pacejka, H. and Bakker, E. (1991). "the magic formula tyre model". Proc. 1st Intcolloq on tyre models for vehicle dynamics analysis, pages 1–18.
[Rabhi, 2004] Rabhi, A. R. (2004). Modélisation pour l’estimation de l’état et des forces d’interaction véhicule-route. In Proc. Conférence internationale francophone d’automatique (CIFA2004), Douz, Tunisie.
37/43 30/09/2005Version 2.0[Ray, 1997] Ray, L. R. (1997). Nonlinear tire force estimation and road friction identification : Simulation and
experiments. Automatica, 33(10) :1819–1833.
[Ryu, 2005] Ryu, J. (2005). State and parameter estimation for vehicle dynamics control using GPS. PhDthesis, Standford University.
[Ryu and Gerdes, 2004] Ryu, J. and Gerdes, J. C. (2004). Estimation of vehiocle roll and road bank angle. InProc American Control Conference (ACC), Boston, MA.
[SERA-CD, 2005] SERA-CD (2005). Cahier des charges pour l’estimateur de profil de sol. Technical report,SARI-RADARR.
[Stéphant, 2004] Stéphant, J. (2004). Contribution à l’étude et à la validation expérimentale d’observateursappliqués à la dynamique du véhicule. PhD thesis, Université de Technologie de Compiègne.
[Tseng, 2001] Tseng, H. (2001). "dynamic estimation of vehicle road bank angle". "Vehicle system dynamics",36(4-5) :307–328.
38/43 30/09/2005Version 2.0A Centrale gyrospcopique (microstrain)
39/43 30/09/2005Version 2.0B Capteur de vitesse par micro-ondes (Corrsys-datron)
40/43 30/09/2005Version 2.0
41/43 30/09/2005Version 2.0C Capteur de vitesse optique (Corrsys-datron)
42/43 30/09/2005Version 2.0D Comparaison de différents moyens de mesure de la vitesse (Co rrsys-
datron)
La figure 33 présente la réponse de différents capteurs de la société Corrsys-Datron. Les essais présentéssont réalisés sur deux types de revêtement mouillés. Le véhicule roule à vitesse constante, en suivant unetrajectoire rectiligne, sur ces deux revêtements. La comparaison est réalisée sur la vitesse mesurée ainsi quesur la distance parcourue par le véhicule. Ces figures sont issus du rapport [Ltd, 2004].
Les capteurs suivants ont été comparés :– Correvit S-CE : moyen de mesures optiques, deux axes, basé sur l’analyse du défilement de la structure
de la chaussée. Ce capteur a depuis été remplacé par la gamme S-400.– Correvit L-400 : moyen de mesure identique au S-CE. Ce capteur ne mesure la vitesse que dans une
direction.– Correvit S-400 : moyen de mesure identique aux deux précédents capteurs. Il mesure les vitesses selon
deux axes– Racelogic Vbox II 20Hz GPS : moyen de mesure de la vitesse par GPS. Dans le cadre de ce test, la
reconstruction de la vitesse de l’antenne est calculée à partir des pseudo-distances sattelitaires à l’aided’un filtre de Kalman.
– Datron Microsat 20Hz GPS. Centrale d’acquisition par GPS– Microstar : capteur de vitesse un axe par micro-ondes.Au vu des résultats obtenus lors de cette campagne d’acquisition, on peut voir la baisse de qualité des
moyens de mesure optique et micro-ondes sur les surfaces mouillées. Ces résultats ne sont pas exploitablespour les contraintes de qualité de reconstruction imposés par l’application SARI-RADARR.
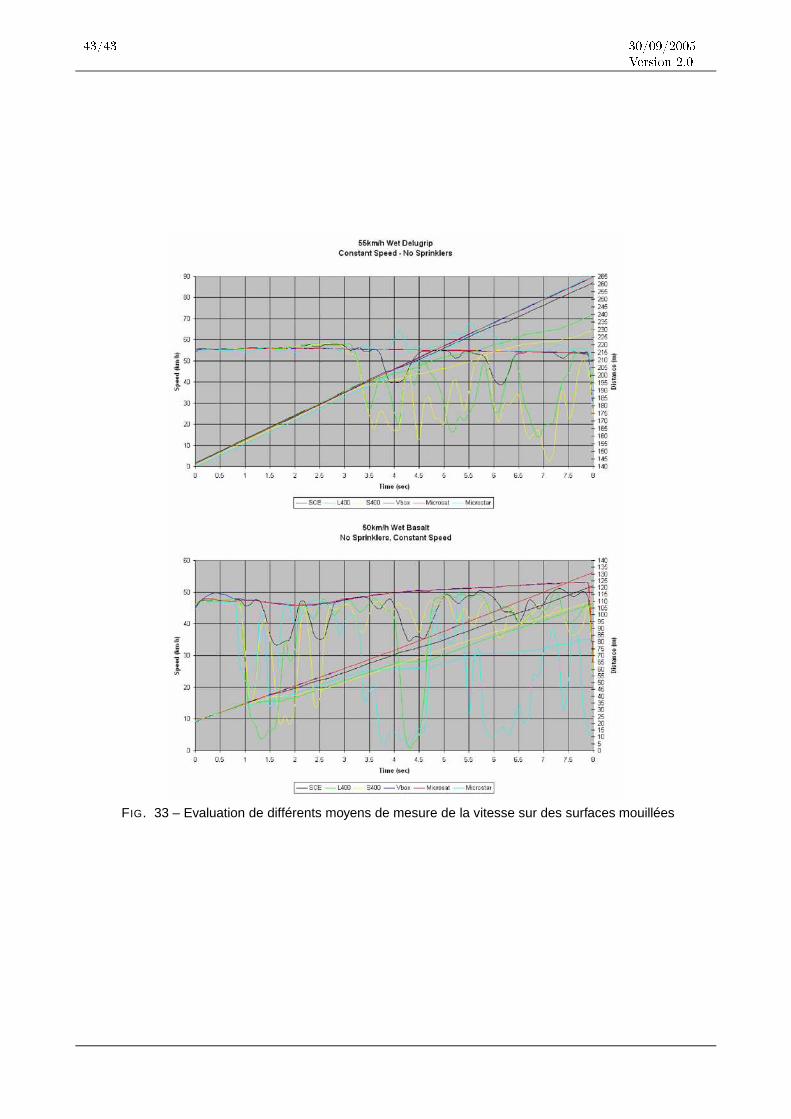
43/43 30/09/2005Version 2.0
FIG. 33 – Evaluation de différents moyens de mesure de la vitesse sur des surfaces mouillées


























![CHM 2520 Chimie organique II - University of Ottawa · CHM 2520! Substitutions et éliminations! 6! Cinétique de deuxième ordre • mesure de [P] en fonction de temps • mesure](https://img.pdfslide.fr/doc/110x75/5e6632bafc5728515758a2a4/chm-2520-chimie-organique-ii-university-of-ottawa-chm-2520-substitutions-et-liminations.jpg)