Embed Size (px)
Citation preview

Faculté des Sciences Économiques et Sociales - Université de LilleLicence 2 / Économie - Gestion
Techniques Mathématiques de l’Économiste - Analyse
Fonction de deux variables
M. Pelini, V. Ledda
22 juin 2018
Table des matières
1 Fonctions réelles de deux variables réelles1 Fonctions réelles de deux variables réelles 31.1 Introduction1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Définitions1.2 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Quelques fonctions usuelles1.3 Quelques fonctions usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Représentation graphique - Courbes de niveau1.4 Représentation graphique - Courbes de niveau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Notion de limite - continuité2 Notion de limite - continuité 72.1 Introduction2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Un peu de topologie2.2 Un peu de topologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Limite de f en X02.3 Limite de f en X0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4 Continuité de f en X02.4 Continuité de f en X0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Dérivées partielles3 Dérivées partielles 143.1 Définitions3.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2 Élasticités partielles3.2 Élasticités partielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Fonctions homogènes3.3 Fonctions homogènes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.4 Dérivées partielles d’ordre 23.4 Dérivées partielles d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Fonctions différentiables et continûment différentiables4 Fonctions différentiables et continûment différentiables 204.1 Différentielle d’une fonction de 2 variables4.1 Différentielle d’une fonction de 2 variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2 Fonctions continûment différentiables4.2 Fonctions continûment différentiables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3 Valeur approchée d’une fonction4.3 Valeur approchée d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.4 Dérivation en chaîne4.4 Dérivation en chaîne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5 Optimisation d’une fonction de plusieurs variables5 Optimisation d’une fonction de plusieurs variables 245.1 Définitions5.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.2 Optimisation : conditions nécessaires du premier ordre5.2 Optimisation : conditions nécessaires du premier ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.3 Optimisation libre d’une fonction de 2 variables réelles5.3 Optimisation libre d’une fonction de 2 variables réelles . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.4 Optimisation d’une fonction de deux variables sous contrainte d’égalité5.4 Optimisation d’une fonction de deux variables sous contrainte d’égalité . . . . . . . . . . . . . . . . . . 28
6 Extrema globaux6 Extrema globaux 306.1 Le théorème de Weirstrass6.1 Le théorème de Weirstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306.2 Cas des fonctions convexes6.2 Cas des fonctions convexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7 Primitive d’une fonction réelle7 Primitive d’une fonction réelle 327.1 Définitions7.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327.2 Condition suffisante d’existence de primitive7.2 Condition suffisante d’existence de primitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327.3 Propriétés7.3 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327.4 Primitives usuelles7.4 Primitives usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8 Intégrale d’une fonction continue sur un intervalle fermé borné8 Intégrale d’une fonction continue sur un intervalle fermé borné 348.1 Définition8.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348.2 Interprétation graphique8.2 Interprétation graphique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358.3 Propriétés fondamentales8.3 Propriétés fondamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 388.4 Intégrale fonction de la borne supérieure8.4 Intégrale fonction de la borne supérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39

Fonction de deux variables Analyse 2
9 Méthodes de calcul intégral9 Méthodes de calcul intégral 399.1 Intégration par parties9.1 Intégration par parties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399.2 Intégration par changement de variable9.2 Intégration par changement de variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
10 Exemples d’intégrales généralisées10 Exemples d’intégrales généralisées 4210.1 Exemples10.1 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4210.2 Remarques10.2 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
11 Applications de l’intégration11 Applications de l’intégration 4411.1 Indice de Gini11.1 Indice de Gini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4411.2 Capitalisation continue11.2 Capitalisation continue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4511.3 Excédent consommateur11.3 Excédent consommateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4611.4 Coût marginal11.4 Coût marginal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
12 Compléments12 Compléments 4712.1 Formule de Taylor avec reste intégral12.1 Formule de Taylor avec reste intégral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
1 Fonctions réelles de deux variables réelles
1.1 Introduction
1.1.1 Point de vue économique
La macroéconomie et la microéconomie utilisent de nombreuses fonctions de plusieurs variables pour modéliserl’économie.
Exemple 1. Considérons la fonction de consommation macro-économique. Si on schématise, on peut dire que celle-ciassocie au revenu disponible des ménages Yd le niveau de consommation agrégée dans l’économie C.
C : Yd 7→ C(Yd
)On peut vouloir toutefois adopter une modélisation plus précise en supposant que la consommation dépend égalementdu patrimoine financier des ménages (noté B). La nouvelle fonction de consommation sera alors une fonction de 2variables
C :(Yd ,B
)7→ C
(Yd ,B
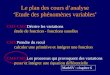
)Exemple 2. [Fonction d’utilité] On s’intéresse à une économie où deux biens distincts sont disponibles. Notons x et yles quantités respectives de ces deux biens. On note U(x;y) la fonction d’utilité du consommateur donnant un indicede satisfaction associé au panier de consommation (x;y).On suppose que (toute chose étant égale par ailleurs) :
— lorsque la quantité d’un bien augmente d’une unité, l’utilité augmente ;— l’augmentation d’utilité procurée par une unité est plus petite que l’augmentation procurée par l’unité précé-
dente.
Figure 1 – Fonction d’utilité et courbes d’indifférence
Si l’on note p > 0 le prix du premier bien, q > 0 le prix du second bien et R le revenu d’un consommateur alors on a :
px+ qy 6 R
De plus si C 6 R représente la consommation on a :
px+ qy = C⇔ y = −p
qx+
Cq
(1)
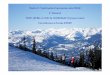
Pour une dépense (C), le consommateur cherche à maximiser son indice d’utilité en choisissant le panier de biens quilui offre la plus grande utilité. Cela revient à chercher un maximum sous la contrainte d’égalité (11). Ce principe estillustré sur la figure 22.Voir (11) page 793.
3 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Figure 2 – Utilité et consommation
1.1.2 Point de vue géométrique
Exemple 3. [Équation de plan] L’équation d’un plan de R3 est donnée par :
(P ) : ax+ by + cz = d
où (a,b,c) , (0,0,0).Supposons que c soit non nul, on peut alors écrire :
z =−acx+−bcy + d
et considérer la fonction de R2 dans R définie par :
f :R2 −→ R
(x,y) 7−→ −acx+−bcy + d
La représentation graphique de cette fonction est le plan P .
Exemple 4. [Paraboloïde de révolution]Intéressons nous à la surface définie par z = x2 + y2.
4 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
x
y
z
1.2 Définitions
Définition 1. R2 est l’ensemble des couples (x,y) avec x et y des nombres réels.
Il est possible d’ajouter deux couples ou de multiplier un couple par un nombre réel :{(x,y) + (x′ , y′) = (x+ x′ , y + y′)λ(x,y) = (λx,λy), où λ ∈R
Définition 2. On appelle fonction réelle de 2 variables réelles toute application définie sur un sous-ensemble D deR
2, à valeur dans R.
f :{D 7−→R(x;y) 7→ f (x;y)
On appelle ensemble de définition de la fonction f l’ensemble des couples de R2 qui ont une image par f . On le notesouvent Df .
Exemple 5. Soit f la fonction définie par f (x,y) = x2y + 3y. On a Df =R2.L’image par f du couple (2,1) est f (2,1) = 22.1 + 3.1 = 7.
Exemple 6. Soit f la fonction définie par f (x,y) = ln(x+ y − 1).f est une fonction réelle de deux variables réelles.Elle est définie pour les couples (x,y) tels que x+ y − 1 > 0 soit Df =
{(x,y) ∈R2 tel que y > 1− x
}.
Df est le demi-plan supérieur délimité par la droite d’équation y = 1− x (privé de cette droite).
5 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
0 1 2 3 4−1−2−3−4−50
1
2
3
4
−1
−2
−3
−4
−5
Figure 3 – Df est le demi-plan supérieur délimité par la droite d’équation y = 1− x
� Exercice 1Soit f la fonction définie par f (x,y) =
√x2 − 2y
1. Déterminer et représenter le domaine de définition de f .
2. Calculer, quand c’est possible, l’image par f des couples suivants :(2;1), (1;4), (3;0), (2t; t2) et (ab;2b2).
1.3 Quelques fonctions usuelles
- Les fonctions linéaires définies sur R2 par f (x,y) = ax+ by (avec a et b réels).
- Les fonctions affines définies sur R2 par f (x,y) = ax+ by + c (avec a, b et c réels).
- Les fonctions polynomiales définies sur R2 en faisant la somme de fonctions du type axnym(avec a réel, n et mentiers naturels).Par exemple, P(x,y) = x2y4 − 2x3y + 3xy3 + x2y + x − 1 est une fonction polynomiale de degré 6.
- Les fractions rationnelles sont obtenues en faisant le quotient de deux fonctions polynomiales. Elles sont définiespour tout couple de R2 pour lequel le dénominateur ne s’annule pas.
Par exemple, la fonction f (x,y) =xy
x − yest une fraction rationnelle définie sur R2 privé de la droite ∆ d’équation
y = x.
La fonction g(x,y) =x2 − y2
x2 + y2 est une fraction rationnelle définie sur R2 − {(0,0)}.
1.4 Représentation graphique - Courbes de niveau
Soit D un sous-ensemble de R2 et f une fonction de D dans R.
Définition 3. Le graphe de f est l’ensemble des éléments de R3 (on parle alors de triplets) de la forme (x,y, f (x,y)) avec(x,y) ∈ D. C’est une surface.Soit k ∈R, l’ensemble Ck =
{(x;y;z) ∈R3|f (x,y) = k où (x,y) ∈ D
}est appelé courbe de niveau k de la fonction f .
La courbe de niveau k de f est obtenue en faisant l’intersection de la surface représentative de f et du plan d’équationz = k, comme si on faisait “des tranches horizontales”...
Remarque 1. En théorie du producteur, on considère une entreprise n’ayant recours qu’à deux facteurs de productionet ayant F comme fonction de production, les courbes de niveau de F s’appellent alors les isoquantes ou courbesd’isoproduction de la firme.
6 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
x
y
z
0 1 2−1−20
1
2
−1
−2
k = 2
k = 4
Figure 4 – f (x,y) = x2 + y2 et courbes de niveaux 2 et 4
En théorie du consommateur, on considère une économie possédant deux biens de consommation : soit U la fonctiond’utilité associée, les courbes de niveau de U s’appellent les courbes d’indifférence.
0 1 2 3 40
1
2
3
4
U = 3
U = 1
U = 2
Figure 5 – Carte d’indifférence associée à la fonction d’utilité U(x,y) = xy
2 Notion de limite - continuité
2.1 Introduction
Nous noterons X = (x,y) un couple de R2.
Approche intuitive de la notion de limite :Intuitivement, on a envie de dire la chose suivante :“f (X) tend vers ` quand X tend vers X0”. Cela signifie que “la valeur de f (X) est proche de ` quand X s’approche deX0”.Le problème est de savoir ce que l’on entend par “X s’approche de X0”.
Dans R, c’est facile : on peut s’approcher d’un point par la gauche ou par la droite.Nous avons vu que, la limite en un point existe si et seulement si la limite à gauche existe, la limite à droite existe et
7 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
les deux sont égales.Dans R2, on peut approcher un point le long d’une infinité de chemins. C’est ce qui va rendre rendre la notion delimite plus difficile à définir (et à comprendre...)
Figure 6 – Comment s’approcher d’un point dans R et dans R2
Exemple 7. Soit f la fonction définie sur D =R2 − {(0,0)} par : f (x,y) =xy
x2 + y2 .
Soient X ∈ D et O = (0,0).Notre objectif est de déterminer “la limite de f quand X tend vers O”.Pour cela nous allons nous approcher de O suivant deux directions distinctes.
i) Considérons la droite D1 d’équation y = 2x :
Si X ∈ D1, alors X = (x,2x) et f (X) =x(2x)
x2 + (2x)2 =2x2
5x2 =25
donc limX→OX∈D1
f (X) =25
.
ii) Considérons la droite D2 d’équation y = 3x :
Si X ∈ D2, alors X = (x,3x) et f (X) =x(3x)
x2 + (3x)2 =3x2
10x2 =3
10donc lim
X→OX∈D2
f (X) =3
10.
iii) Conclusion :En approchant O suivant deux droites distinctes, nous avons obtenu deux limites différentes...Cela signifie que la fonction f n’admet pas de limite en O = (0,0).
" Séance no 2L’exemple précédent nous montre que la notion de limite d’une fonction de plusieurs variables est un peu plus compli-quée qu’en une variable. Ceci motive la partie suivante où l’on va définir les notions nécessaires pour appréhendercorrectement cette notion de limite. On en profitera pour donner quelques définitions utiles pour la suite.
2.2 Un peu de topologie
2.2.1 Distance et norme sur R2
Avant d’aborder la notion de limite, il nous faut d’abord formaliser la notion de proximité et donc de distance.
Définition 4. Soient X = (x,y) et X′ = (x′ , y′) deux éléments de R2.On appelle distance (euclidienne) de X à X′ , on note d(X,X′), le réel (positif...)
d(X,X′) =√
(x − x′)2 + (y − y′)2
8 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
xA xB
yA
yB
A
B
Figure 7 – AB =√
(xB − xA)2 + (yB − yA)2
Définition 5. Soit X = (x,y) un élément de R2.On appelle norme (euclidienne) de X, on note ‖X‖, le réel (positif...)
‖X‖ =√x2 + y2
Remarque 2. On constate que :
- d(X,X′) = ||X −X′ || et |X| = d(X,O).
- d(X,X′) = d(X′ ,X),
- d(X,X′) > 0 et d(X,X′) = 0 si et seulement si X = X′ .
Proposition 1. (Inégalité triangulaire)Soient X et Y dans R2, ∀A ∈R2, on a d(X,Y) 6 d(X,A) + d(Y,A).
d(X, A)
d(Y, A)d(X, Y )
X
A
Y
Figure 8 – Inégalité triangulaire
Proposition 2. (Cauchy-Schwarz)Soient X et Y dans R2, on a |X ·Y| 6 ||X|| × ||Y||.
2.2.2 Boule ouverte
Dans R, on appelle voisinage du point x0 un intervalle ouvert du type I = ]x0 − h,x0 + h[.Autrement dit, x ∈ I⇔ |x − x0| < h.
9 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Nous allons définir de la même manière la notion de voisinage dans R2. Nous allons considérer un ensemble quicontient X0 et dans lequel on puisse «bouger», tout au moins légèrement et dans toutes les directions, sans sortir decet ensemble.Pour cela, nous prenons l’ensemble B des éléments de R2 vérifiant ‖X −X0‖ < R avec R > 0.
B ={X = (x,y) ∈R2 tel que ‖X −X0‖ < R
}B =
{X = (x,y) ∈R2 tel que d(X,X0) < R
}B =
{X = (x,y) ∈R2 tel que
√(x − x0)2 + (y − y0)2 < R
}B =
{X = (x,y) ∈R2 tel que (x − x0)2 + (y − y0)2 < R2
}.
L’ensemble B est la boule ouverte de centre X0 et de rayon R (c’est un disque, sans le bord). On la note B(X0,R). C’estun voisinage élémentaire du point X0.
0 1 2 3 40
1
2
3
4
X0R
Figure 9 – B(X0,R)
Définition 6. Soit D un sous-ensemble de R2 et X0 un point de D.X0 est intérieur à D si on peut construire une boule ouverte centrée en X0 et incluse dans D.
Définition 7. Un ensemble de R2 est borné s’il est contenu dans une boule ouverte.
� Exercice 2
1. Donner l’équation de la boule ouverte de centre A(3;−1) est de rayon 2.
2. Déterminer la nature de l’ensemble suivant :
x2 + y2 + 2x − 4y > 20
2.2.3 Ouverts et fermés de R2
On cherche à étendre la notion d’intervalle ouvert et d’intervalle fermé.
Un ouvert de R2 peut être un ensemble «compliqué» une définition précise est nécessaire.
Attention
Définition 8. Un ensemble O de R2 est un ouvert de R2 si en tout point A de O il existe une boule ouverte centrée en Acontenue dans O.
10 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Dans R Dans R2
Fermé
Ouvert
Ni ouvert, ni fermé
Figure 10 – Comparaison entre R et R2
Ensemble ouvert Ensemble qui n’est pas un ouvert
Figure 11 – Ensemble ouvert
Définition 9. Un sous-ensemble de R2 est fermé dans R2 si son complémentaire dans R2 est un ouvert de R2.
Remarque 3. L’ensemble vide et R2 sont à la fois des ouverts et des fermés de R2
Définition 10. Les sous-ensembles fermés et bornés de R2 sont appelés ensembles compacts de R2.
2.2.4 Convexité
Définition 11. Un sous-ensemble D de R2 est dit convexe lorsque :
∀(x;y) ∈ D2, ∀t ∈ [0;1], tx+ (1− t)y ∈ D
Autrement dit : un sous-ensemble D est convexe si tout segment reliant deux points est inclus dans D.
Définition 12. Soit D un sous-ensemble convexe de R2, une fonction f est dite convexe sur D lorsque :
∀(x;y) ∈ D2, ∀t ∈ [0;1], f (tx+ (1− t)y) 6 tf (x) + (1− t)f (y)
11 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Figure 12 – Ensemble convexe
Définition 13. Soit D un sous-ensemble convexe de R2, une fonction f est dite concave sur D lorsque −f est convexe.
Les fonctions convexes et concave sont souvent utilisées en économie.
Exemple 8. Considérons la fonction de production de Cobb-Douglas suivante :
f (x,y) = Axayb
où x > 0 et y > 0 sont les «inputs».Supposons a+ b < 1 (rendements d’échelle décroissants). Dans ce cas la fonction f est concave.
Figure 13 – Fonction de Cobb-Webb (rendements d’échelle décroissants)
La surface se situe au dessus de toute corde.
Remarque 4. Démontrer qu’une fonction est convexe à l’aide de la définition est en général difficile, on donnera uncritère plus simple à utiliser dans la suite.
� Exercice 3Représenter chacun des ensembles suivants, puis dire s’il s’agit d’un ouvert, d’un fermé, d’un compact, d’un convexe,etc.
1. A = {(x;y) ∈R2|x+ y > 1}2. B = {(x;y) ∈R2|x2 + y2 6 1}3. C = {(x;y) ∈R2| − x2 + y 6 1}4. D = {(x;y) ∈R2|x+ y > 1 et 2x − y > 0}
2.3 Limite de f en X0
12 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Définition 14. Soit f une fonction réelle de 2 variables réelles définie sur l’ensemble D et X0 un point de R2.On dit que f tend vers ` lorsque X tend vers X0, (X restant dans D) si :
limd(X,X0)→0
X∈D
|f (X)− `| = 0 ou lim‖X−X0‖→0
X∈D
|f (X)− `| = 0
Cela signifie que f (X) est “proche de `” quand X est ”suffisamment proche de X0“.
On notera dans ce cas : limX→X0X∈D
f (X) = `.
Si D =R2, on notera simplement limX→X0
f (X) cette limite.
Remarque 5. X0 n’est pas nécessairement un point de D mais on doit pouvoir l’approcher par des points de D. Entermes topologiques, on dit que X0 est un point adhérent à D
Exemple 9.Considérons la fonction f définie sur D =R2 − {(0,0)} par : f (x,y) =
xy√x2 + y2
Le point O = (0,0) n’est pas dans D cependant, on peut l’approcher par des points de D. Déterminons limX→OX∈D
f (X) :
Remarquons tout d’abord que ∀X = (x,y) ∈R2, on a :|x| 6 ‖X‖ ( car x2 6 x2 + y2). De même |y| 6 ‖X‖.
Donc |f (X)| 6|x||y|√x2 + y2
6‖X‖2
‖X‖,
on obtient |f (X)| 6 ‖X‖.On en déduit que, quand ‖X‖ → 0, f (X)→ 0. C’est à dire lim
X→OX∈D
f (X) = 0.
Remarque 6. D’un point de vue pratique, il est assez difficile de calculer des limites ”à la main“ pour des fonctions dedeux variables. Cependant, il est important de comprendre le principe car c’est sur le concept de limite que s’appuieles autres concepts (continuité, dérivabilité, différentiabilité...)
" Séance no 3Les propriétés algébriques des limites sont les mêmes que pour les fonctions d’une variable réelle.
2.4 Continuité de f en X0
Définition 15. Soit f une fonction définie sur un sous-ensemble D de R2 et X0 ∈ D.On dit que f est continue en X0 si f (X) tend vers f (X0) quand X tend vers X0 (suivant n’importe quel chemin dans D),soit encore lim
X→X0X∈D
f (X) = f (X0).
On dit que f est continue sur D si f est continue en tout point de D.
Exemple 10. Soit X ∈R2, X = (x,y), on pose : f (X) = x.(f est appelée la première projection ou encore projection sur la première coordonnée).Soit donc X0 = (x0, y0).On a |x − x0| 6
√(x − x0)2 + (y − y0)2⇔ |f (X)− f (X0)| 6 d(X,X0).
limd(X,X0)→0
|f (X)− f (X0)| = 0⇔ limX→X0
f (X) = f (X0).
Par conséquent, la fonction f est continue en tout point X0 de R2.
Remarque 7. De même, la deuxième projection est également continue en tout point de R2.Ces exemples élémentaires nous seront très utiles par la suite.
13 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Théorème 1. Soient f et g deux fonctions réelles définies sur un sous-ensemble D de R2 et X0 un point de D.Si f et g sont continues en X0, alors :
i) La fonction produit f .g est continue en X0
ii) La fonction somme f + g est continue en X0
iii) Si de plus, g(X0) , 0, alors la fonction quotientf
gest continue en X0.
O
Preuve. Ce théorème se déduit de façon immédiate des propriétés des limites . cqfd
De manière plus générale, ce théorème, associé à la continuité des deux projections vue précédemment, nous permetd’affirmer que :
- Les fonctions linéaires sont continues sur R2.
- Les fonctions affines sont continues sur R2.
- Les fonctions polynomiales sont continues sur R2.
- Les fractions rationnelles sont continues en tout point de R2 pour lequel le dénominateur ne s’annule pas.
Théorème 2. (Composée de fonctions)Soit f une fonction définie sur un sous-ensemble D de R2 et g est une fonction de R dans R.Si f est continue en X0 ∈ D et si g est continue en y0 = f (X0), alors g ◦ f est continue en X0.
O
Preuve. Ce théorème se démontre exactement de la même manière que celui qui lui correspond pour les fonctiond’une variable réelle vu antérieurement. cqfd
3 Dérivées partielles
3.1 Définitions
Soit f une fonction de 2 variables réelles définie sur un sous-ensemble D de R2 et X0 = (x0, y0) ∈ D.
Définition 16.
- On appelle dérivée partielle de f en (x0, y0) par rapport à x la dérivée de l’application x 7−→ f (x,y0) en x0(quand elle existe).
On la note alors�f
�x(x0, y0) ou encore f ′x (x0, y0).
- On appelle dérivée partielle de f en (x0, y0) par rapport à y la dérivée de l’application y 7−→ f (x0, y) en y0(quand elle existe).
On la note alors�f
�y(x0, y0) ou encore f ′y (x0, y0).
Remarque 8. On a donc,quand ces limites existent :�f
�x(x0, y0) = lim
h→0
f (x0 + h,y0)− f (x0, y0)h
et�f
�y(x0, y0) = lim
h→0
f (x0, y0 + h)− f (x0, y0)h
.
Définition 17. Soit f une fonction de 2 variables réelles définie sur un sous-ensemble D de R2.f est dite dérivable sur D si f est dérivable par rapport à x et à y, en tout point de D.
Exemple 11. Considérons la fonction f définie sur R2 par f (x,y) = x3y2.considérons le point X0 = (a,b) ∈R2.
14 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Fixons y = b, nous avons h(x) = f (x,b) = x3b2. Cette fonction est une fonction polynôme et elle est dérivable en toutpoint de R et on a : h′(x) = 3x2b2, donc h′(a) = 3a2b2.
D’où :�f
�x(a,b) = 3a2b2.
Fixons x = a, nous avons k(y) = a3y2. Cette fonction est une fonction polynôme et elle est dérivable en tout point de Ret on a : k′(y) = 2a3y, donc k′(b) = 2a3b.
D’où :�f
�y(X0) = 2a3b.
Exemple 12. Considérons la fonction f définie par : f (x,y) = ln(x2 + y2 − 1).Elle est définie sur D =
{(x,y) ∈R2 tel que x2 + y2 − 1 > 0
}.
0 1 2 3 4−1−2−3−4−50
1
2
3
4
−1
−2
−3
−4
−5
Figure 14 – Ensemble de définition de f (x,y) = ln(x2 + y2 − 1)
La fonction f est dérivable sur D (comme composée de fonctions dérivables) et on a :�f
�x(x,y) =
2xx2 + y2 − 1
�f
�y(x,y) =
2yx2 + y2 − 1
.
Exemple 13. Reprenons l’exemple de la fonction de production. On considère souvent qu’elle dépend de deuxfacteurs de production le travail L et le capital K. Formellement, nous avons donc affaire à une fonction de deuxvariables Y = f (K,L).On définit alors la productivité marginale du travail (PmL) comme étant “le supplément de production qui résulted’une augmentation ∆L du travail, ramené à une unité”.
PmL'f (K,L +∆L)− f (K,L)
∆L∆L étant suffisamment petit, on estime que cette définition reste valable pour ∆L→ 0, on a alors
PmL =�
�Lf (K,L)
� Exercice 4
Calculer�f
�x(1,2) et
�f
�y(1,2) pour la fonction f définie sur R2 par f (x,y) = 2x3y2 + 2y + 4x.
� Exercice 5Calculer les dérivées partielles de la fonction f définie sur D par :
15 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
f (x,y) = x+ (x3 − y)2 sur D =R2,
f (x,y) =y
x2 + 2ysur D =R2 − {P } où P est la parabole d’équation y = −x
2
2,
f (x,y) = ln(exy + y2 + 2) sur D =R2.
3.2 Élasticités partielles
Définition 18. Soit f une fonction de 2 variables réelles définie sur un ensemble D et X0 = (x0, y0) un point de D telque f (X0) , 0.L’élasticité de la fonction f , par rapport à la variable x, au point X0, est l’élasticité de la fonction x 7−→ f (x,y0) au pointX0.
Nous noterons : efx (X0) cette élasticité.Nous avons donc :
efx (X0) = x0
f ′x (X0)f (X0)
=x0
f (X0)�f
�x(X0)
Exemple 14. Reprenons la fonction de production : f (K,L).On suppose que le taux d’accroissement de la production est proportionnel au taux d’accroissement du capital.
Ce qui s’écrit :∆f (K,L)f (K,L)
= a∆KK
. On obtient a =
∆f (K,L)f (K,L)∆KK
=K
f (K,L).∆f (K,L)∆K
.
En passant à la limite (∆K “petit”), on obtient a =K
f (K,L)�f
�K(K,L) = eK
f .
L’élasticité de la production par rapport au capital «mesure la dépendance» de la production par rapport au capital.Quand le capital augmente de x%, la production augmente de eK
f .x%.
� Exercice 6Calculer les élasticités partielles de la fonction de production type Cobb-Douglas f (K,L) = KαLβ.
3.3 Fonctions homogènes
Soient f une fonction de 2 variables réelles définie sur un ensemble D et α ∈R.
Définition 19. On dit que f est homogène de degré α sur D si :
∀t > 0, ∀X ∈ D, on a tX ∈ D et f (tX) = tα f (X)
Exemple 15. Considérons la fonction f (x,y) = x1/3 y2/3 définie sur D ={(x,y) ∈R2, tel que x > 0 et y > 0
}.
Si (x,y) ∈ D et si t > 0, alors tx > 0 et ty > 0. Donc (tx, ty) ∈ D.On a alors f (tx, ty) = (tx)1/3 (ty)2/3 = t1/3 t2/3 f (x,y) = t f (x,y).Par conséquent, f est homogène de degré 1 sur D.
Exemple 16. Plus généralement, la fonction de production de Cobb-Douglas F : (K,L) 7→ cKαLβ est homogène dedegré α+ β sur (R∗+)2.On dit que F est à rendements d’échelle croissants si α+ β > 1, constants si α+ β = 1, décroissants si α+ β < 1.
Théorème 3. Soit f une fonction homogène de degré α sur D.
Si f est dérivable sur D, alors�f
�xet
�f
�ysont homogènes de degré (α− 1) sur D.
O
16 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Preuve. Puisque f est homogène de degré α sur D, alors, par définition :
∀ (x;y) ∈ D, ∀t > 0, f (tx; ty) = tα f (x;y) (2)
Nous allons dériver par rapport à x les deux membres de l’égalité (33) :À gauche : La fonction f est dérivable sur D donc la fonction qui à X 7−→ f (tX) est dérivable par rapport à x sur D en
tant que fonction composée de fonctions dérivables et la dérivée vaut t�f
�x(tx, ty).
À droite :�f
�x(tα f (x,y)) = tα
�f
�x(x,y)
On obtient donc
t�f
�x(tx, ty) = tα
�f
�x(x,y)
soit encore :�f
�x(tx, ty) = tα−1 �f
�x(x,y)
�f
�xest homogène de degré α− 1.
De même pour�f
�ycqfd
Théorème 4. (Théorème d’Euler)Soit f une fonction définie sur (R∗+)2 = ]0,+∞[× ]0,+∞[, dérivable et dont les dérivées partielles sont continues. On aalors :
f est homogène de degré α si et seulement si x�f
�x(X) + y
�f
�y(X) = αf (X)
O
Remarque 9. Ce théorème permet d’établir le théorème d’épuisement du produit (connu des économistes)Si f est une fonction de production dépendant du capital K et du travail L, homogène de degré 1, on a
Lf ′L(K,L) + Kf ′K(K,L) = f (K,L)
� Exercice 7Pour chacune des fonctions suivantes :
- Préciser le domaine de définition D.- Vérifier, à l’aide de la définition, que la fonction f est homogène sur D et préciser son degré.- Refaire la vérification en appliquant le théorème d’Euler.
1. f (x,y) = x2 + 2y2 − x3
y.
2. f (x,y) = lny − lnx+ 1.
3.4 Dérivées partielles d’ordre 2
Soit f une fonction définie, dérivable sur un sous-ensemble D de R2.
Définition 20. Dans la mesure où les dérivées partielles�f
�xet
�f
�ysont elles mêmes des fonctions de deux variables
définies surD,si elles sont dérivables, nous pouvons les dériver de nouveau pour obtenir des dérivées partielles secondes.
17 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
�
�x
(�f
�x
)≡
�2f
�x2 ,�
�y
(�f
�x
)≡
�2f
�y�x
�
�x
(�f
�y
)≡
�2f
�x�y,
�
�y
(�f
�y
)≡
�2f
�y2
Vous rencontrerez aussi la notation suivante :
�2f
�y�x≡ f ′′xy ,
�2f
�x�y≡ f ′′yx ,
�2f
�x2 ≡ f ′′x2 ,�2f
�y2 ≡ f ′′y2 .
Dans les notations, il faut respecter l’ordre de dérivation. f ′′yx indique que l’on dérive par rapport à y puis x, ce
qui correspond à�2f
�x�y.
Attention
Définition 21. Si les 2 dérivées partielles premières de f sont dérivables par rapport aux deux variables, en tout pointde D, on dit que la fonction f est deux fois dérivable sur D.
Exemple 17. Soit f définie sur R2 par f (X) = f (x,y) = xy2 + 3exy.f est une fonction dérivable par rapport à x sur R2 car c’est une somme de fonctions dérivables.
On a en particulier�f
�x(X) = y2 + 3exy, pour tout X = (x,y) ∈R2.
Cette fonction dérivée partielle est elle-même dérivable sur R2 et on a :
f ′′x2(X) =�2f
�x2 (X) = 3exy, f ′′xy(X) =�2f
�y�x(X) = 2y + 3ex
Exemple 18. Soit f définie sur R2 − {(0,0)} par f (X) = f (x,y) = ln(x2 + y2).f est une fonction dérivable par rapport à y sur R2 − {(0,0)} (composée d’une fonction polynomiale et de la fonction ln,elles mêmes dérivables).
On a en particulier�f
�y(X) =
2yx2 + y2 , pour tout X = (x,y) ∈R2.
Cette fonction dérivée partielle est elle-même dérivable sur R2 − {(0,0)} et on a :
f ′′yx(X) =�2f
�x�y(X) = −
4xy(x2 + y2)2 , f
′′y2(X) =
�2f
�y2 (X) =2(x2 − y2)(x2 + y2)2
Remarque 10. Il faut faire attention en général à l’ordre de dérivation...sauf dans le cas suivant :
Théorème 5. Théorème de Schwarz (admis)Soit f une fonction définie sur un sous-ensemble D de R2 et X un point de D.Si f admet en X des dérivées partielles secondes continues , alors on a l’égalité :
�2f
�x�y(X) =
�2f
�y�x(X)
O
Remarque 11. Ce théorème est utile dans la pratique car il diminue le nombre de calculs à effectuer.(3 dérivées partielles secondes au lieu de 4).De plus, il s’applique généralement à toutes les fonctions que vous rencontrerez en économie.
18 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Exemple 19. Soit f définie sur R2 par f (X) = f (x,y) = x3 + 2xy3 − 4y2.f est une fonction dérivable sur R2 (fonction polynomiale).
On a :�f
�x(X) = 3x2 + 2y3 et
�f
�y(X) = 6xy2 − 8y, pour tout X = (x,y) ∈R2.
Ces fonctions dérivées partielles sont elles-mêmes dérivables sur R2 et les dérivées partielles seront des fonctionspolynomiales donc continues sur R2, on peut appliquer le théorème précédent :
�2f
�x�y(X) =
�2f
�y�x(X) = 6y2
Par ailleurs,�2f
�x2 (X) = 6x et�2f
�y2 (X) = 12xy − 8
Remarque 12. Le théorème de Schwarz est d’autant plus intéressant que le nombre de variables est important... Pourune fonction de 3 variables réelles, il permet de calculer 6 dérivées partielles secondes au lieu de 9 ! !Il convient cependant de bien maîtriser les fonctions de 2 variables réelles avant de passer à l’étape suivante.
� Exercice 8Soit f la fonction définie par f (x,y) = ln(1 + xy).
1. Déterminer et représenter le domaine de définition D de f .
2. Justifier que f est dérivable sur D et calculer ses dérivées partielles premières.
3. Justifier que f est deux fois dérivable sur D et calculer ses dérivées partielles secondes.
19 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
4 Fonctions différentiables et continûment différentiables
4.1 Différentielle d’une fonction de 2 variables
Définition 22. Soit f une fonction définie sur un ensemble D de R2 et X0 ∈ D.
f est différentiable en X0 si il existe 2 réels a et b (qui dépendent de X0) tels que :
∀H = (h,k) ∈R2 tel que X0 + H ∈ D, f (X0 + H) = f (X0) + ah+ bk + ‖H‖ε(H) où lim‖H‖→0
ε(H) = 0
L’application (h,k) 7→ ak + bk est appelée “différentielle de f en X0”. On la note dfX0.
On a donc f (X0 + H) = f (X0)+dfX0(H) + ‖H‖ε(H) où lim
‖H‖→0ε(H) = 0.
Exemple 20. Soit f la fonction définie sur R2 par f (x,y) = xy.Démontrons que f est différentiable en tout point X0 = (x,y) de R2.
Proposition 3. Toute fonction différentiable en X0 est continue en X0.
Preuve. Si f est différentiable en X0, alors on a par définition :
f (X0 + H) = f (X0)+dfX0(H) + ‖H‖ ε (H) (∗) et lim
H→0ε (H) = 0
La différentielle de f en X0 est une fonction linéaire de la forme :dfX0
(H) = ah+ bk, et donc dfX0(0) = 0.
De plus, une fonction linéaire étant continue en tout point, limH→0
dfX0(H) = dfX0
(0) = 0.
D’autre part, limH→0
ε (H) = 0 et limH→0‖H‖ = 0.
De (∗), on tire : limH→0
f (X0 + H) = f (X0) et f est continue en X0. cqfd
Proposition 4. Si f est différentiable en X0, alors f est dérivable en X0 et on a :
dfX0(H) =
�f
�x(X0) h+
�f
�y(X0) k
Preuve. Nous allons démontrer que f est dérivable par rapport à x.
Soit donc X0 = (x,y) et H = (h,0) tel que X0 + H ∈ D.f est différentiable en X0 donc : f (X0 + H) = f (X0)+dfX0
(H) + ‖H‖ ε (H) avec limH→0
ε (H) = 0
D’où f (X0 + H) = f (X0) + ah+ |h|ε (H) avec limh→0
ε (H) = 0
On obtientf (X0 + H)− f (X0)
h= a+ (signe de h)ε (H) avec lim
h→0ε (H) = 0
limh→0
f (X0 + H)− f (X0)h
= a (la limite existe et elle est finie).
On en déduit que f est dérivable en X0 par rapport à x et que�f
�x(X0) = a.
De même, on montre qu’elle est dérivable par rapport à y et que :�f
�y(X0) = b.
Donc dfX0(H) =
�f
�x(X0) h+
�f
�y(X0) k cqfd
20 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Remarque 13. La réciproque de cette propriété est fausse : il existe des fonctions qui sont dérivables en un pointmais non différentiables en ce point !Pour s’en convaincre, considérons la fonction f définie sur R2 par :
f (x,y) ={
1 si x , 0 et y , 00 si x = 0 ou y = 0
Cette fonction admet en (0,0) une dérivée partielle par rapport à x et par rapport à y mais elle n’est pas différentiableen (0,0) (en fait, elle n’est même pas continue en (0,0)...).
4.2 Fonctions continûment différentiables
Théorème 6 (Accroissements finis). Soit f une fonction dérivable sur un ensemble D convexe de R2. Soit A et B deuxéléments de D tels que E(xB;yA) appartiennent à D.Il existe des éléments de D, C ∈]A; E[ et D ∈]E; B[ tels que :
f (B) = f (A) +�f
�x(C)(xB − xA) +
�f
�y(D)(yB − yA)
O
Preuve.
L’hypothèse de convexité assure que la fonction φ : t 7−→ f (t ~e1 + yA~e2) est définie sur [xA;xB]. Comme f est dérivablesur D, la fonction φ est dérivable sur l’intervalle [xA;xB]. On peut appliquer le théorème des accroissements finis àcette fonction, il existe c ∈]xA;xB[ tel que
f (E)− f (A) = f (B + (yA − yB)~e1)− f (A) = φ′(c)(xB − xA) =�f
�x(C)(xB − xA)
21 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
En effet C = c~e1 + yA~e2 ∈]A; E[.De même la fonction t 7−→ f (t ~e2 + xB~e1) est dérivable sur [yA;yB], il existe d ∈]yA;yB[ tel que
f (B)− f (E) = f (B)− f (B + (yA − yB)~e1) =�f
�y(D)(yB − yA)
En sommant ces deux égalités, on obtient le résultat souhaité.cqfd
Le théorème suivant nous offre une réciproque partielle à la proposition «différentiable⇒ dérivable».
Théorème 7. Soit f une fonction définie sur un ensemble D de R2 et X0 ∈ D. Si les dérivées partielles de f existent auvoisinage de X0 et sont continues en X0 alors f est différentiable en X0. Plus précisément, nous dirons alors que f estcontinûment différentiable.
O
Remarque 14.
- Ce théorème nous donne une caractérisation simple des fonctions différentiables.- Une fonction continûment différentiable sur D est dite de classe C1 sur D
Remarque 15. Notation différentielle
Soit f une fonction de classe C1 en un élément U de R2.D’après la proposition 44 on a :
dfU (H) =�f
�x(U) h1 +
�f
�y(U) h2 (3)
avec H = (h1;h2).Si l’on note dx la projection suivant la première variable et dy la projection suivant la seconde, (33) devient :
dfU = f ′x (U)dx+ f ′y (U)dy. (4)
ou
dfU =�f
�x(U)dx+
�f
�y(U)dy. (5)
Exemple 21. Soit f la fonction de deux variables réelles définie par f (x,y) = ln(x2 + y2 − 1
).
Exemple 22. Toutes les fonctions polynômes et quotients de polynômes sont de classe C1 sur leur domaine dedéfinition.
Preuve. Par hypothèse, f est dérivable au voisinage de X0, donc il existe une boule ouverte, B, centrée en X0 surlaquelle f est dérivable. Une boule étant convexe, nous sommes dans les conditions d’application du théorème desaccroissements finis (66).Soit H un vecteur tel que X0 + H appartienne à cette boule. Il existe C ∈ B et D ∈ B tels que :
f (X0 + H)− f (X0) = h�f
�x(C) + k
�f
�y(D)
f (X0 + H)− f (X0)− h�f
�x(X0)− k
�f
�y(X0) = h(
�f
�x(C)−
�f
�x(X0)) + k(
�f
�y(D)−
�f
�x(X0))
En utilisant l’inégalité de Cauchy-Schwartz (22),
|f (X0 + H)− f (X0)− h�f
�x(X0)− k
�f
�y(X0)| 6
√||H||2
√(�f
�x(C)−
�f
�x(X0))2 + (
�f
�y(D)−
�f
�x(X0))2
Or, les dérivées partielles sont continues, donc lorsque que H tend vers ~0 - C et D tendent vers X0 - et ( �f�x (C)− �f�x (X0))
et ( �f�y (D)− �f�x (X0)) tendent vers 0.
cqfd
22 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
� Exercice 9
Soit f la fonction définie par f (x,y) =x − y
x2 + y2 − 4.
1. Déterminer le domaine de définition de f (noté D).
2. Justifier que f est de classe C1 sur D.
3. Soit X0 ∈ D, exprimer la différentielle de f en X0.
4.3 Valeur approchée d’une fonction
Soit f une fonction définie sur un ensemble D de R2 et X0 = (x0, y0) ∈ D.Si f est continûment différentiable en X0 = (x0, y0), alors on a
∀H ∈R2 tel que X0 + H ∈ D, f (X0 + H) = f (X0)+dfX0(H) + ‖H‖ ε (H) avec lim
H→0ε (H) = 0
Dans cette expression, on distingue :- une partie affine : H 7→ f (X0)+dfX0
(H).C’est la meilleure approximation affine de f au voisinage de X0. On l’appelle «développement limité» de f en X0.- un reste : ‖H‖ ε (H).Si on suppose que ‖H‖ est «suffisamment petit», la quantité ‖H‖ ε (H) est alors négligeable devant la partie affine.On en déduit que f (X0)+dfX0
(H) est une valeur approchée de f (X0 + H). On obtient :
f (X0 + H) ' f (X0)+dfX0(H)
Exemple 23. Reprenons la fonction f définie par f (x,y) = ln(x2 + y2 − 1
).
On veut calculer une valeur approchée de la fonction au point X = (1,01;0,98).
� Exercice 10Soit U la fonction d’utilité d’un consommateur disposant de deux biens X et Y.
On pose U(x,y) =x
y2 , ∀x > 0, ∀y > 0.
1. Calculer l’utilité marginale du bien X et du bien Y en un point (x0, y0) quelconque puis au point (1,1).
2. De combien varie l’utilité si x varie de 1 à 1,1 et y de 1 à 0,9?
4.4 Dérivation en chaîne
On considère :
- u et v deux fonctions définies sur un intervalle ensemble I de R,
- f une fonction définie sur un ensemble D de R2.
On suppose que : ∀t ∈ I, (u(t),v(t)) ∈ D et on pose g(t) = f (u(t),v(t))
Théorème 8. Si u et v sont dérivables sur I et si f est de classe C1 sur D,alors g est dérivable sur I et pour tout t dans I, on a :
g ′(t) =�f
�x(u(t),v(t))u′(t) +
�f
�y(u(t),v(t))v′(t)
O
Preuve. Nous ne démontrerons mais pas ce théorème mais nous allons donner des éléments de preuve...
Posons X0 = (u(t),v(t)), f est C1 en X0 donc : dfX0= f ′x (X0)dx+ f ′y (X0)dy.
Or x est une fonction dérivable de t donc dx = u′(t)dt. De même, dy = v′(t)dt.
On obtient dfX0= f ′x (X0)u′(t)dt + f ′y (X0)v′(t)dt, soit encore
dgdt
(t) = f ′x (X0)u′(t) + f ′y (X0)v′(t).
D’où g ′(t) = f ′x (u(t),v(t))u′(t) + f ′y (u(t),v(t))v′(t). cqfd
23 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Remarque 16.
- Il est peut-être plus aisé de retenir ce théorème sous la forme «abrégée» suivante :
dgdt
=�f
�x
dxdt
+�f
�y
dydt
(6)
- On parle aussi parfois de «dérivation le long d’un chemin».
Exemple 24. Posons I =R.Considérons la fonction f définie sur R2 par : f (x,y) =
√x2 + y2 et
les fonctions u et v définies sur R par : u(t) = e−t et v(t) = et .
Remarque 17. Dans cet exemple, u et v sont des fonctions explicites de t. L’utilisation du théorème de dérivation enchaîne n’est donc pas indispensable...On peut dériver directement g(t) =
√(e−2t + e2t).
Cependant, dans de nombreux cas en économie, on sait que u et v dépendent de t, mais on ne peut pas expliciter cesfonctions. L’utilisation du théorème de dérivation en chaîne est alors incontournable !
� Exercice 11
Soit une fonction de production Q(K,L) = KL−K2 − 2L2 dans laquelle le capital K et le travail L varient au cours dutemps selon les formules : K(t) = 0,35t et L(t) = 0,2t.
1. Justifier que Q est de classe C1 sur (R∗+)2 et exprimer sa différentielle.
2. En déduiredQdt
.
5 Optimisation d’une fonction de plusieurs variables
Soit f une fonction définie sur un ensemble D de R2.Nous allons chercher les éventuels extrema de f . C’est à dire la valeur la plus grande ou la plus petite prise par f(selon les situations...) ainsi que les points pour lesquels ces extrema sont atteints.
5.1 Définitions
Définition 23. Soit X∗ un point de D.La fonction f présente un maximum global en X∗ si ∀X ∈ D, f (X) 6 f (X∗)La fonction f présente un minimum global en X∗ si ∀X ∈ D, f (X) > f (X∗)
Définition 24. Soit X∗ un point de D.La fonction f présente un maximum local en X∗ s’il existe un sous-ensemble D′ ⊂ D contenant X∗ tel que : ∀X ∈D′ , f (X) 6 f (X∗),La fonction f présente un minimum local en X∗ s’il existe un sous-ensemble D′ ⊂ D contenant X∗ tel que : ∀X ∈D′ , f (X) > f (X∗).
Rappel : On dit qu’un point X∗ est intérieur à D si on peut construire une boule ouverte centrée en X∗, incluse dansD.Cela signifie que tous les chemins linéaires passant par X∗, dans toutes les directions, restent localement dans D.
Remarque 18. Si f est définie sur R2, tous les points sont intérieurs.
24 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
NM
Figure 15 – Exemple de points intérieurs et non intérieurs
5.2 Optimisation : conditions nécessaires du premier ordre
On a vu en L1 que si une fonction f présente un extremum local au point intérieur x∗ de son ensemble de définition etsi elle est dérivable en x∗, alors f ′ (x∗) = 0.On dispose d’un résultat analogue pour les fonctions de plusieurs variables.
Théorème 9. Soit f une fonction définie sur un ensemble D de R2 et X∗ un point intérieur à D.
Si f est différentiable en X∗ et si f admet un extremum local en X∗, alors on a :
�f
�x(X∗) =
�f
�y(X∗) = 0
O
Définition 25. Ces égalités s’appellent les conditions du premier ordre (du problème d’optimisation).Tout point X∗ vérifiant ces conditions est appelé point candidat ou point critique (du problème d’optimisation).
Soulignons que ces conditions du premier ordre sont des conditions nécessaires mais, en général, ne sont pas suffi-santes de sorte qu’un point candidat n’est pas forcément un extremum.
Si on considère la fonction f définie sur R2 par f (x,y) = xy ( C1 sur R2).
On remarque�f
�x(0,0) =
�f
�y(0,0) = 0. Cependant, f ne présente pas d’extremum local en (0,0).
Exemple 25. On considère la fonction définie sur R2 par f (x,y) = x3 + y2 − xy.
Une fonction peut admettre un extremum sur la frontière sans que les dérivés partielles s’annulent.Attention
Exemple 26. La fonction f : (x,y) 7−→√
1− (x2 + y2) est définie sur le disque fermé de centre O et de rayon 1. Elleadmet pour minimum 0, il est atteint sur le cercle de centre O de rayon 1 et pourtant les dérivées partielles nes’annulent en aucun point du cercle.
25 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
� Exercice 12Soit f la fonction définie sur R2 par f (x,y) = y3 + x2 − 3my, avec m ∈R.Déterminer les points critiques de f suivant les valeurs du paramètre m.
5.3 Optimisation libre d’une fonction de 2 variables réelles
5.3.1 Fonctions deux fois continûment différentiables
Définition 26. Soit f une fonction définie sur un ensemble D de R2.Si f admet des dérivées partielles secondes continues en un point X0 de D, on dit que f est deux fois continûmentdifférentiable en X0 ou encore que f est de classe C2 en X0.Si f est deux fois continûment différentiable en tout point de D, on dit que la fonction est deux fois continûmentdifférentiable sur D ou encore qu’elle est de classe C2 sur D.
Remarque 19. En particulier, une fonction de classe C2 vérifie le théorème de Schwarz.
Donc�2f
�x�y(X) =
�2f
�y�x(X), ce qui limite le nombre de calculs à effectuer.
Théorème 10. (Formule de Taylor à l’ordre 2 pour une fonction de deux variables)Soient f une fonction définie un ensemble D de R2 et X0 = (x0, y0) un point de D.Si f est de classe C2 en X0, alors pour tout H ∈R2, H = (h,k) tel que X0 + H ∈ D, on a :
f (X0 + H) = f (X0) + hf ′x (X0) + k f ′y (x0, y0) +12
[h2 f ′′x2 (x0, y0) + 2hk f ′′xy (x0, y0) + k2 f ′′y2 (x0, y0)
]+(h2 + k2
)ε (h,k)
avec lim(h,k)→(0,0)
ε (h,k) = 0
O
Cette formule est aussi appelée le développement limité d’ordre 2 de la fonction f au voisinage de X0.
Remarque 20. Afin d’alléger la suite du cours, nous allons utiliser les notations de Monge (1746-1818).
r =�2f
�2x(X) = f ′′x2(X), s =
�2f
�x�y(X) = f
′′xy (X) et t =
�2f
�2y(X) = f ′′y2(X)
26 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
La formule de Taylor s’écrit alors :
f (X0 + H) = f (X0) + hf ′x (X0) + k f ′y (X0) +12
[r.h2 + 2s.hk + t.k2
]+(h2 + k2
)ε (h,k)
avec lim(h,k)→(0,0)
ε (h,k) = 0
5.3.2 Conditions du second ordre pour une fonction de deux variables
On donne dans ce paragraphe des conditions du second ordre qui sont suffisantes pour la recherche d’un extremumlocal dans un problème d’optimisation.Soient f une fonction définie sur un ensemble D de R2 et X∗ = (x∗, y∗) un point intérieur à D.Supposons que :
- X∗ est un point critique (c’est à dire f ′x (X∗) = f ′y (X∗) = 0)
- les dérivées partielles de f sont continues en X∗ (autrement dit f est C2 au point critique X∗).
Posons δ = f ′′x2 (X∗) f ′′
y2 (X∗)−[f ′′xy (X∗)
]2= rt − s2
Théorème 11.
- Si δ > 0, alors f admet un extremum local en X∗. De plus :
si f ′′x2 (X∗) > 0, alors il s’agit d’un minimum local
si f ′′x2 (X∗) < 0, alors il s’agit d’un maximum local
- Si δ < 0, alors f n’admet pas d’extremum local en X∗.On dit alors que f présente un col en X∗ ou encore que le point de R3 de coordonnées (x∗, y∗, f (x∗, y∗)) est unpoint-selle.
- Si δ = 0, alors on ne peut rien conclure.
O
27 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Preuve. f est C2 en X∗, on peut donc utiliser la formule de Taylor à l’ordre 2.Par hypothèses, les dérivées partielles premières sont nulles en X∗ et par conséquent on obtient :
f (x∗ + h,y∗ + k) = f (x∗, y∗) +12
[rh2 + 2shk + tk2
]+(h2 + k2
)ε (h,k)
avec lim(h,k)→(0,0)
ε (h,k) = 0
Nous admettrons que le reste(h2 + k2
)ε (h,k) est (localement) négligeable devant la partie principale :
f (x∗, y∗) +12
[rh2 + 2shk + tk2
]lorsque (h,k) est "proche" de (0,0).
Étudions le signe de : f (x∗ + h,y∗ + k)− f (x∗, y∗), ce qui revient à étudier le signe de l’expression :rh2 + 2shk + tk2 .
Pour k , 0, si on introduit le rapporth
k= a, on obtient :
rh2 + 2shk + tk2 = k2(rh2
k2 + 2sh
k+ t
)= k2(ra2 + 2sa+ t).
L’expression entre parenthèses est un trinôme du second degré en a de discriminant :
∆ = 4[s2 − rt
]= −4δ
Trois cas se présentent :
1. Cas δ > 0 : Alors ∆ < 0 et le trinôme a un signe constant :
(a) si r > 0 : il sera positif et par conséquent f (x∗ + h,y∗ + k)− f (x∗, y∗) > 0.f présente un minimum local en X∗.
(b) si r < 0, il sera négatif et par conséquent f (x∗ + h,y∗ + k)− f (x∗, y∗) < 0.f présente un maximum local en X∗.
2. Cas δ < 0 : Alors ∆ > 0 et le trinôme a deux racines réelles distinctes et par conséquent :f (x∗ + h,y∗ + k)− f (x∗, y∗) n’a pas un signe constant au voisinage de X∗. Il n’y a pas d’extremum local en X∗.
3. Cas δ = 0 : Alors ∆ = 0 et le trinôme a une racine double.
Par conséquent : f (x∗ + h,y∗ + k)− f (x∗, y∗) a un signe constant sauf sur la droite correspondant à la racine dutrinôme.Pour connaître le signe de f (x∗ + h,y∗ + k)− f (x∗, y∗) sur cette droite, on ne peut pas se contenter de l’étude faiteavec un développement à l’ordre 2.On ne peut rien conclure.
cqfd
Exemple 27. Cherchons les extrema éventuels de la fonction définie par f (x,y) = x3 + y3 − 3xy.
Exemple 28. Reprenons f la fonction définie sur R2 par f (x,y) = y3 + x2 − 3my, avec m ∈R.Nous allons étudier les extrema de f .
� Exercice 13Étudier les extrema de la fonction f définie sur R2 par f (x,y) = x3 + y3 − 3x − 12y
5.4 Optimisation d’une fonction de deux variables sous contrainte d’égalité
On veut étudier l’existence d’un extremum local de la fonction f dérivable soumise à la contrainte d’égalité g (x,y) = 0.
Exemple 29. Dans la théorie micro-économique du consommateur, on cherche souvent à maximiser la fonctiond’utilité U(x,y), sous la contrainte budgétaire xpx + ypy −R = 0.
Deux méthodes seront présentées dans ce cours .
28 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
5.4.1 Méthode par substitution
Si, à partir de la contrainte, on peut exprimer une variable en fonction de l’autre, par exemple y en fonction de x, on seramène à la recherche d’un extremum d’une fonction d’une seule variable en remplaçant dans f (x,y) la variable y parson expression en fonction de x. On se ramène alors à l’étude d’une fonction d’une variable réelle.
Exemple 30. Étudier l’existence d’extremum de la fonction f définie sur R2 par f (x,y) = xy sous la contrainted’égalité g (x,y) = x+ y − 6 = 0.
� Exercice 14L’utilité de deux en quantité x et y est donnée par U(x,y) = x4y.Leurs coûts unitaires sont respectivement de 20 euros et 10 euros.Optimiser l’utilité du consommateur disposant d’un budget de 1500 euros.
5.4.2 Méthode de Lagrange
Il arrive qu’il ne soit pas aisé - voire impossible - d’exprimer une variable en fonction de l’autre en utilisant lacontrainte g (x,y) = 0. La méthode de Lagrange permet de résoudre cette difficulté.
Cette méthode repose sur le théorème suivant :
Théorème 12. Soit f une fonction définie sur un domaine D de R2. Soit g une fonction définie sur un domaine D′ ⊂ D.On pose A = {(x;y) ∈ D′ |g(x;y) = 0}On fait les hypothèses suivantes :
1. f possède en a un minimum local relativement à A. C’est à dire que a est un point intérieur de D′ et il existe uneboule ouverte, B⊂ A, centrée en a tel que ∀x ∈ B; f (x) 6 f (a)
2. f est g sont de classe C1 en a.
3. dga , 0
Dans ces condition, il existe un réel λ tel que la fonction définie par
L(x,y,λ) = f (x;y) +λg(x;y)
admette un minimum local en a.
O
Voir par exemple (77, p. 534) pour des justifications de ce théorème.Un extremum de la fonction de deux variables f soumise à la contrainte g (x,y) = 0 est un extremum libre de lafonction de trois variables, notée L, appelée le lagrangien de f , définie par :
L(x,y,λ) = f (x,y) +λg (x,y)
La variable auxiliaire est appelée multiplicateur de Lagrange.On recherche ensuite les points critiques et leur multiplicateur associé à l’aide des conditions du premier ordreappliquées à la fonction L :
�L�x
(x,y,λ) =�L�y
(x,y,λ) =�L�λ
(x,y,λ) = 0
Puis on étudie pour chaque point critique trouvé X∗ = (x∗, y∗) le signe de l’expressionf (x∗ + h,y∗ + k)− f (x∗, y∗) qui est une fonction de (h,k), h et k étant liés par la relation :g (x∗ + h,y∗ + k) = γ (h,k).Deux cas peuvent se produire :
1. Si f (x∗ + h,y∗ + k)− f (x∗, y∗) a un signe constant lorsque (h,k) est voisin de (0;0), alors f présente un extremumlocal en X∗.
(a) Si f (x∗ + h,y∗ + k)− f (x∗, y∗) > 0, c’est un minimum local.
(b) Si f (x∗ + h,y∗ + k)− f (x∗, y∗) 6 0, c’est un maximum local.
29 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
2. Si f (x∗ + h,y∗ + k)− f (x∗, y∗) n’a pas un signe constant lorsque (h,k) est voisin de (0;0), alors f ne présente pasd’extremum local en X∗.
Exemple 31.Reprenons l’exemple précédent : f (x,y) = xy avec la contrainte g (x,y) = x+ y − 6 = 0.
� Exercice 15Étudier les extrema de la fonction f définie sur R2 par f (x,y) = 6− 4x − 3y, sous la contrainte x2 + y2 = 1.
6 Extrema globaux
6.1 Le théorème de Weirstrass
Théorème 13. Une fonction continue sur un compact D atteint son maximum et son minimum sur DO
Exemple 32. Trouver le maximum de f (x;y) = x2 − y2 + 1 sous la contrainte x2 + y2 = 2.
Exemple 33. Trouver le maximum de la fonction d’utilité U(x;y) = x 3√y sous la contrainte budgétaire x+ 2y 6 12.
6.2 Cas des fonctions convexes
Proposition 5. Soit f une fonction définie et différentiable sur un ouvert convexe de R2. On a l’équivalence suivante :f est convexe sur D si et seulement si
∀(x;y) ∈ D2, f (y)− f (x) 6dfy(y − x) (7)
Preuve. Supposons que f est convexe. Pour t ∈]0;1]
f (tx+ (1− t)y) 6 tf (x) + (1− t)f (y)
f (tx+ (1− t)y)− f (y) 6 t(f (x)− f (y))f (tx+ (1− t)y)− f (y)
t6 f (x)− f (y)
dfy(tx+ (1− t)y − y) + ||tx − ty||ε(tx − ty)
t6 f (x)− f (y)
dfy(x − y) + ||x − y||ε(tx − ty) 6 f (x)− f (y)
En faisant tendre t vers 0, on obtient f (x)− f (y) >dfy(x − y).Réciproquement, posons xt = tx+ (1− t)y (t ∈ [0;1]), montrons que g est convexe.Appliquons l’inégalité (77) aux couples (x0;xt) et (x1;xt).
{f (xt)− f (x1) 6dfxt (xt − x1)
f (xt)− f (x0) 6dfxt (xt − x0){tf (xt)− tdfxt (xt − x1) 6 tf (x1)
(1− t)f (xt)− (1− t)dfxt (xt − x0) 6 (1− t)f (x0)
f (xt)+dfxt (−t(xt − x1)− (1− t)(xt − x0)) 6 tf (x1) + (1− t)f (x0) Par somme
f (xt)+dfxt (xt − xt) 6 tf (x1) + (1− t)f (x0)
f (tx+ (1− t)y) 6 tf (x) + (1− t)f (y)
Donc la fonction f est convexe. cqfd
30 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Proposition 6. Soit f une fonction de classe C1 et convexe sur un ensemble convexe D.
dfa = 0⇔ f admet un minimum global en a
Preuve. Si f admet un minimum global en a alors f admet un minimum local en a et dfa = 0. Réciproquement,d’après la proposition 55 f (x)− f (a) >dfa(x − a). Or dfa = 0, donc f (x) > f (a). cqfd
Proposition 7. Soit f une fonction de classe C2 sur un ouvert convexe D. f est convexe sur D si et seulement si δ > 0 etr > 0 sur D .
Preuve. Supposons que la fonction f soit concave. Soit X un élément de D et H ∈R2 tel que X + H ∈ D.D’après la formule de Taylor (f est de classe C2) :
f (X + H) = f (X) +−−−−→grad fX ·H +
12
tH ·D2Xf ·H + ||H||2ε(H)
La fonction f étant convexe :
12
tH ·D2Xf ·H + ||H||2ε(H) > 0
Posons H = tH′ avec t ∈]0;1], l’égalité précédente devient :
t2
2tH′ ·D2
Xf ·H′ + t2||H′ ||2ε(tH′) > 0
tH′ ·D2Xf ·H
′ + 2||H′ ||2ε(tH′) > 0
En faisant tendre t vers 0, on obtient :
tH′ ·D2Xf ·H
′ > 0
Ce qui signifie que la forme quadratique est toujours positive donc r > 0 et δ > 0Réciproquement, supposons que r > 0 et δ > 0, ce qui revient à dire que ∀H ∈R2 tel que X + H ∈ D, tH ·D2
Xf ·H > 0 etmontrons que f est convexe.Soit (X1,Y0) ∈ D2, t ∈ [0;1], la fonction
g : [0;1] −→ R2
t 7−→ f (tX1 + (1− t)X0)
est bien définie car D est convexe. De plus cette fonction est de classe C2 en tant que composée de fonctions de classeC2.Posons Xt = tX1 + (1− t)X0 et remarquons que g ′(t) =dfXt
(X1 −X0) et g ′′(t) = t(X1 −X0) ·DXtf · (X1 −X0). Donc par
hypothèse g ′′(t) > 0 et la fonction g ′ est croissante.D’après le théorème de Taylor-Lagrange, il existe c ∈]0;1[ tel que
g(1) = g(0) + g ′(c)
Ainsi
g(1)− g(0) = g ′(c) > g ′(0)
f (X1)− f (X0) >dfX0(X1 −X0)
D’après le théorème (55), la fonction f est convexe sur D. cqfd
Exemple 34. On considère la fonction de production q(x1;x2) =√x1 +√x2 avec (x1;x2) ∈R+x ×R+x. Soit p le prix du
produit (output) et w1 et w2 le prix des intrants (input). On cherche à étudier le problème de maximisation du profit.
31 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
7 Primitive d’une fonction réelle
7.1 Définitions
Définition 27. Soit f une fonction définie sur un intervalle ouvert I de R.On dit que la fonction F est une primitive de f sur I si F est définie et dérivable sur I et si F′(x) = f (x) pour tout xélément de I.
Définition 28. Soit f une fonction définie sur un intervalle fermé I = [a,b].On dit que la fonction F est une primitive de f sur I si F est définie sur I = [a,b], dérivable sur ]a,b[ et admet unedérivée à droite en a et une dérivée à gauche en b telles que :∀x ∈]a,b[,F′(x) = f (x) et F′d(a) = f (a) et F′g (b) = f (b).
Remarque 21. F est, par définition, dérivable donc continue.
Exemple 35. On considère la fonction f définie sur I =R par f (x) = e2x + x2.
La fonction F définie sur I =R par F(x) =12
e2x +13x3 est dérivable sur R et vérifie F′(x) = f (x) pour tout nombre réel x.
Par conséquent la fonction F est une primitive de la fonction f sur R.
Remarque 22. Nous pouvons remarquer que la fonction G définie sur I =R par G(x) =12
e2x +13x3 + 4 est également
une primitive de la fonction f sur R.Il n’y a donc pas unicité de la primitive d’une fonction.Nous reviendrons sur ce résultat dans la suite du chapitre.
7.2 Condition suffisante d’existence de primitive
Théorème 14. (admis)Si f est une fonction définie et continue sur un intervalle I de R, alors f admet une primitive sur I.
O
Remarque 23. Ce théorème constitue une condition suffisante à l’existence d’une primitive.Il existe des fonctions non continues qui admettent des primitives.
7.3 Propriétés
Proposition 8. Soit une fonction f admettant une primitive F sur un intervalle I, alors :la fonction G est une primitive de f sur I si et seulement si il existe k ∈R tel que G = F + k.
Preuve.⇐ On a : ∀x ∈ I, G′(x) = F′(x) = f (x) car la dérivée d’une constante est égale à 0, par conséquent, la fonction G est
une primitive de la fonction f sur I.⇒ Réciproquement, supposons que F et G sont deux primitives de la fonction f sur I.
Nous avons donc : F′ = G′ = f et par conséquent, (F−G)′ = F′ −G′ = 0. Or F et G sont continues sur I donc F−Gaussi. Nous pouvons donc en déduire qu’il existe une constante réelle k telle que F−G = k (d’après le chapitre2).
cqfd
Proposition 9. Si la fonction f admet une primitive F sur I, alors : ∀a ∈ I,∀λ ∈R, il existe une et une seule primitive Gde la fonction f sur I vérifiant la condition G(a) = λ.Cette fonction G sera définie par : ∀x ∈ I,G(x) = F(x)− F(a) +λ.
Preuve. Considérons la fonction G définie sur I par : G(x) = F(x)− F(a) +λ.- Nous avons :G′(x) = F′(x) = f (x) pour tout x ∈ I, donc G est une primitive de f sur I.
32 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
- De plus on a : G(a) = F(a)− F(a) +λ = λ.Par conséquent la fonction G ainsi définie satisfait aux conditions imposées.
- Montrons maintement, à l’aide d’un raisonnement par l’absurde, l’unicité d’une telle fonction.Supposons qu’il existe une autre fonction H différente de la fonction G telle que :{
H est une primitive de f sur IH(a) = λ .
D’après la première propriété, il existera une constante réelle k, telle que : ∀x ∈ I,G(x) = H(x) + k.Puisque a ∈ I, on en déduit donc que G(a) = H(a) + k soit encore λ = λ+ k. Nous obtenons donc que k = 0 etpar conséquent : ∀x ∈ I,G(x) = H(x), ce qui est contradictoire avec la supposition faite sur la fonction H, ce quiprouve l’unicité.
cqfd
Exemple 36. Soit f définie sur R par f (x) = e2x + x2.
Quelle est l’unique primitive de f qui s’annule en 0 ?
Nous savons que les primitives de f sont de la forme F(x) =12
e2x +13x3 + k,∀x ∈R.
On cherche l’unique primitive telle que F(0) = 0 :
F(0) = 0⇔ 12
e0 +13
03 + k = 0⇔ 12
+ k = 0⇔ k = −12
.
La primitive cherchée est donc F(x) =12
e2x +13x3 − 1
2.
Proposition 10. Si{
f admet une primitive F sur Ig admet une primitive G sur I , alors ∀ (α,β) ∈ R2, la fonction αF + βG est une primitive de la
fonction αf + βg sur I.
Preuve. Par définition, F et G sont dérivables (car ce sont des primitives...) donc αF + βG est dérivable.On a : (αF + βG)′ = αF′ + βG′ = αf + βg, par conséquent, αF + βG est une primitive de la fonction αf + βg sur I. cqfd
Remarque 24. Une fonction admet une infinité de primitive, mais une seule dont la courbe représentative passe parun point donné.Voir cette vidéovidéo (http://pod.univ-lille1.fr/video/2378-primitives/http://pod.univ-lille1.fr/video/2378-primitives/).
7.4 Primitives usuelles
Nous rappellerons le tableau des primitives usuelles vues dans les classes antérieures.Dans le tableau qui suit, k désigne une constante réelle quelconque.
33 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Fonction Primitives
f (x) = C (constante) F(x) = Cx+ k
f (x) = x F(x) =12x2 + k
f (x) = xα où α ∈R− {−1} F(x) =1
α+ 1xα+1 + k
f (x) =1x2 F(x) = −1
x+ k
f (x) = sinx F(x) = −cosx+ k
f (x) = cosx F(x) = sinx+ k
f (x) = sin(ax+ b) avec a , 0 F(x) = −1a
cos(ax+ b) + k
f (x) = cos(ax+ b) avec a , 0 F(x) =1a
sin(ax+ b) + k
f (x) =1x
avec x , 0 F(x) = ln |x|+ k
f (x) = ex F(x) = ex + k
f (x) = (u(x))α .u′(x) où α ∈R\{−1} F(x) =1
α+ 1(u(x))α+1 + k
f (x) =u′(x)u(x)
F(x) = ln |u(x)|+ k
f (x) = u′(x).eu(x) F(x) = eu(x) + k
Remarque 25. On notera encore∫f (t)dt une primitive (définie à une constante près) de la fonction f .
Exemple 37.
f (x) =2
2x+ 3définie sur I = [0;+∞[. On a F(x) = ln(|2x+ 3|) + k,k ∈R.
g(x) = (3x − 1)4 définie sur I =R. On a G(x) =1
15(3x − 1)5 + k,k ∈R.
h(x) = xex2
définie sur I =R. On a H(x) =12
ex2
+ k,k ∈R.
� Exercice 16Déterminer l’unique primitive F de f sur R vérifiant la condition souhaitée avec f (x) = (2x+ 3)2 et F(0) = 5.
8 Intégrale d’une fonction continue sur un intervalle fermé borné
8.1 Définition
Définition 29. Soit I un intervalle fermé, borné de R et a et b deux éléments de I.Soit f une fonction continue sur I et F une primitive de f sur I.On appelle intégrale de a à b de la fonction f le nombre réel F(b)− F(a).
On le note∫ b
af (x)dx ou encore [F(x)]ba.
34 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
∫ b
af (x)dx = [F(x)]ba = F(b)− F(a)
Remarque 26.- La définition précédente a bien un sens puisque la quantité F(b) − F(a) est indépendante de la primitive F
choisie.
- Dans l’expression∫ b
af (x)dx, la lettre x est une variable muette et on pourrait aussi bien écrire
∫ b
af (t)dt.
Exemple 38. ∫ 1
02dt = [2t]1
0 = 2− 0 = 2
∫ 3
0e2x dx =
[12
e2x]3
0=
12
e6 − 12
e0 =12
e6 − 12∫ 0
1tet
2dt =
[12
et2]0
1=
12− 1
2e
� Exercice 17Calculer les intégrales suivantes :
A =∫ 4
02x2 + 5x − 8 dx, B =
∫ e
1
ln t
tdt et C =
∫ 4
3
1(x − 1)(x − 2)
dx.
Pour C : écrire1
(x − 1)(x − 2)sous la forme :
a
x − 1+
b
x − 2.
8.2 Interprétation graphique
Exemple 39. Soit k ∈]0,+∞[ et f la fonction définie sur [a,b] par f (x) = k.
+ +
a b
k
b − a
Figure 16 – Aire du rectangle et intégrale de f : x 7→ k
Calculons∫ b
af (t)dt :
∫ b
af (t)dt =
∫ b
akdt = [kt]ba = kb − ka = k(b − a).
Calculons l’aire du rectangle hachuré : A = l × L = k(b − a).
On constate que A =∫ b
af (t)dt.
Exemple 40. Soient m et p réels et f la fonction définie sur [a,b] par f (x) = mx+ p.On suppose que la fonction f est positive sur l’intervalle [a,b].
Calculons∫ b
af (t)dt.
35 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
∫ b
af (t)dt =
∫ b
amt + p dt =
[mt2
2+ pt
]ba∫ b
af (t)dt =
(mb2
2+ pb
)−(ma2
2+ pa
)= m
(b2 − a2
2
)+ p(b − a) = (b − a)
(mb+ a
2+ p
)= (b − a)
ma+ pmb+ p
2.
On remarque que∫ b
af (t)dt est l’aire du trapèze formé par les droites d’équation x = a, x = b, y = 0 et y = mx+ p.
a b
ma + p
mb + p
Figure 17 – Aire du trapèze et intégrale de f : x 7→mx+ p
Généralisation :Soient a et b deux nombres réels tels que a < b.Soit f une fonction continue et positive sur l’intervalle [a,b].
L’intégrale∫ b
af (x)dx représente l’aire exprimée en unités d’aire de la partie du plan délimitée par les droites
d’équations x = a, x = b, l’axe des abscisses et la courbe représentative de la fonction f .
a b
y = f(x)
Figure 18 – Représentation graphique de∫ b
af (x)dx
Remarque 27.L’aire sous la courbe s’exprime en fonction de l’aire du rectangle unité. C’est à dire le rectangle ayant pour sommetl’origine du repère et dont la longueur vaut une unité de l’axe des abscisses et la largeur une unité de l’axe desordonnées.Par exemple :
— si l’unité des axes est le centimètre alors l’aire sous la courbe sera exprimée en cm2 ;— si l’axe des abscisses représente un temps exprimé en seconde et l’axe des ordonnées représente une vitesse
exprimée en mètre par seconde alors l’aire sous la courbe sera exprimée en mètre.Si les unités des axes ne sont pas précisées, on exprimera l’aire sous la courbe en unité d’aire ua.
Remarque 28.Soit f une fonction continue sur l’intervalle [a;b].
36 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Figure 19 – Unité d’aire
Si y = f (x) 6 0 alors −f (x) > 0 et on se ramène au cas précédent par :∫ b
af (x)dx = −
∫ b
a−f (x)dx
Si f (x) est de signe quelconque les parties au dessus de l’axe des abscisses sont comptées positivement, celles endessous sont comptées négativement (Voir figure 2020).
Figure 20 – Interprétation graphique de l’intégrale
Définition 30. Soit f une fonction continue sur un intervalle [a,b] (a < b).
On appelle valeur moyenne de f sur [a,b] le réel : m =1
b − a
∫ b
af (t) dt
Remarque 29. Si f est positive sur l’intervalle [a,b], le rectangle de hauteur m et de côté b − a a une aire égale à cellede la partie de plan hachurée dans la figure 2121.
Exemple 41. Soit f la fonction définie sur I = [−1,1] par f (x) =x
(x2 + 9)2 .
La valeur moyenne de f sur I est µ =1
1− (−1)
∫ 1
−1
t
(t2 + 9)2 dt.
µ =12× 1
2
∫ 1
−12t(t2 + 9)−2 dt = −1
4
[(t2 + 9)−1
]1−1
= 0.
(Résultat prévisible puisque la fonction f est impaire...)
37 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Figure 21 – Valeur moyenne
8.3 Propriétés fondamentalesa) Premières propriétés
Proposition 11. Soient f et g deux fonctions continues sur l’intervalle fermé, borné I et a, b et c trois éléments de I.Alors on a :
i)∫ a
bf (x)dx = −
∫ b
af (x)dx.
ii)∫ a
af (x)dx = 0.
iii) ∀ (α,β) ∈R2, on a :∫ b
a(αf (x) + βg(x))dx = α
∫ b
af (x)dx+ β
∫ b
ag(x)dx.
Cette propriété est appelée la linéarité de l’intégrale.
iv)∫ b
af (x)dx+
∫ c
bf (x)dx =
∫ c
af (x)dx.
Cette propriété est appelée la relation de Chasles.
Preuve. f et g étant toutes deux continues sur I, elles admettent des primitives que nous noterons F et G.
i) On a :∫ a
bf (x)dx = F(a)− F(b) = − (F(b)− F(a)) = −
∫ b
af (x)dx.
ii) On a :∫ a
af (x)dx = F(a)− F(a) = 0.
iii) On a :∫ b
a(αf (x) + βg(x))dx = [αF(x) + βG(x)]ba = (αF(b) + βG(b))− (αF(a) + βG(a)), soit encore :∫ b
a(αf (x) + βg(x))dx = α (F(b)− F(a)) + β (G(b)−G(a)) = α
∫ b
af (x)dx+ β
∫ b
ag(x)dx.
iv) On a :∫ b
af (x)dx+
∫ c
bf (x)dx = (F(b)− F(a)) + (F(c)− F(b)) = F(c)− F(a) =
∫ c
af (x)dx.
cqfd
Proposition 12 (Positivité de l’intégrale). Soient m et M deux nombres réels tels que m < M.
Si f est une fonction positive et continue sur l’intervalle [m,M] alors on a :∫ M
mf (x)dx > 0.
38 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Preuve. f est continue sur [m; M] donc admet des primitives. Soit F une primitive de f .On sait alors que, ∀x ∈ [m; M],F′(x) = f (x) > 0 donc F est croissante sur l’intervalle considéré.∫ M
mf (x)dx = F(M)− F(m) > 0 car F est croissante et m < M. cqfd
Remarque 30. Pour utiliser cette propriété, il faut bien s’assurer que l’on a : m < M.
Théorème 15 (croissance de l’intégrale). Soient m et M deux nombres réels tels que m < M.Soient f et g deux fonctions continues sur l’intervalle [m,M] vérifiant : ∀x ∈ [m,M] , f (x) 6 g(x).
Alors on a :∫ M
mf (x)dx 6
∫ M
mg(x)dx.
O
Preuve. On applique la propriété de positivité à la fonction g − f qui est continue et positive sur l’intervalle [m,M].
On obtient donc :∫ M
m(g(x)− f (x))dx > 0.
On utilise ensuite la linéarité de l’intégrale et on obtient :∫ M
mg(x)dx −
∫ M
mf (x)dx > 0, soit encore :∫ M
mf (x)dx 6
∫ M
mg(x)dx. cqfd
Proposition 13 (Majoration de la valeur absolue d’une intégrale). Soient m et M deux nombres réels tels que m < M.Si f est une fonction continue sur l’intervalle [m,M] alors on a :∣∣∣∣∣∣
∫ M
mf (x)dx
∣∣∣∣∣∣ 6∫ M
m|f (x)|dx
Preuve. Remarquons que : ∀x ∈ [m,M] on a : −|f (x)| 6 f (x) 6 |f (x)|.Appliquons ensuite le théorème de comparaison des intégrales, nous obtenons :∫ M
m−|f (x)|dx 6
∫ M
mf (x)dx 6
∫ M
m|f (x)|dx, soit encore :
−∫ M
m|f (x)|dx 6
∫ M
mf (x)dx 6
∫ M
m|f (x)|dx, ce qui signifie que l’on a :
∣∣∣∣∣∣∫ M
mf (x)dx
∣∣∣∣∣∣ 6∫ M
m|f (x)|dx. cqfd
8.4 Intégrale fonction de la borne supérieure
Soit I un intervalle fermé, borné de R et soit a ∈ I.Soit f une fonction continue sur I.La fonction G : I→R définie par G(x) =
∫ x
af (t)dt est appelée fonction de la borne supérieure.
Proposition 14. G est l’unique primitive de la fonction f sur I qui s’annule en a, c’est à dire que l’on a :{∀x ∈ I, on a : G′(x) = f (x)G(a) = 0
Remarque 31. En particulier, f étant continue, on en déduit que G est de classe C1 sur I.
9 Méthodes de calcul intégral
9.1 Intégration par parties
Définition 31. Une fonction f définie sur un intervalle [a,b] est dite de classe C1 sur [a,b] si f est dérivable et f ′
continue sur l’intervalle [a,b].
39 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Théorème 16. Si u et v sont deux fonctions de classe C1 sur [a,b] alors on a :∫ b
au(t) · v′(t)dt = [u(t) · v(t)]ba −
∫ b
au′(t) · v(t)dt
O
Preuve. La fonction uv est dérivable sur [a,b] car elle est le produit de deux fonctions dérivables sur [a,b] et on a :(uv)′ = u′v +uv′ .De plus, les fonctions (uv)′, u′v et uv′ sont continues sur [a,b] car u et v sont deux fonctions de classe C1 sur [a,b] ;elles possèdent donc une primitive sur [a,b] : en particulier, uv est une primitive de (uv)′ sur [a,b].
On a donc :∫ b
a(u · v)′ (t)dt =
∫ b
a(u′(t)v(t) +u(t)v′(t))dt,
soit encore : [u(t).v(t)]ba =∫ b
au′(t) · v(t)dt +
∫ b
au(t) · v′(t)dt,
ce qui donne donc :∫ b
au(t) · v′(t)dt = [u(t) · v(t)]ba −
∫ b
au′(t) · v(t)dt. cqfd
Remarque 32.
Avec la notation introduite au I), le théorème précédent donne :∫u(t)v′(t)dt = u(t)v(t)−
∫u′(t)v(t)dt
Exemple 42. Calculons I =∫ 1
0tet dt
Prenons :{
u(t) = t u′(t) = 1v′(t) = et v(t) = et .
Les fonctions u et v sont de classe C1 sur l’intervalle [0;1]. Nous pouvons donc utiliser la formule d’intégration parparties.On obtient :
I =∫ 1
0tet dt =
[tet
]10−∫ 1
01.et dt = e −
[et]10
= e − (e − 1) = 1.
Exemple 43. Calculons J =∫ e
1ln tdt,
On ne connait pas de primitive de la fonction ln, par contre, on sait la dériver.
Prenons donc :
u(t) = ln t u′(t) =1t
v′(t) = 1 v(t) = t.
Les fonctions u et v sont de classe C1 sur l’intervalle [1;e]. Nous pouvons donc utiliser la formule d’intégration parparties.On obtient :
J =∫ e
1ln tdt = [t ln t]e
1 −∫ e
1
1ttdt = (e lne − 0)−
∫ e
1dt = e lne − [t]e1 = e lne − (e − 1) = e lne − e+ 1
� Exercice 18
A =∫ 1
0(2x − 4)ex dx, B =
∫ 4
2(x+ 1)lnx dx
9.2 Intégration par changement de variable
Théorème 17. Soient g une fonction de classe C1 sur l’intervalle [a,b] et f une fonction continue sur I = g([a,b]) alorson a : ∫ b
af (g(t)) · g ′(t)dt =
∫ g(b)
g(a)f (u)du
O
40 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Preuve. La fonction f est continue sur I donc elle admet des primitives.Soit F une primitive de f sur I . On a∫ g(b)
g(a)f (u)du = F(g(b))− F(g(a)) = (F ◦ g)(b)− (F ◦ g)(a)
D’autre part, F et g sont dérivables respectivement sur I et sur [a;b] donc F ◦ g est dérivable sur I et on a : ∀x ∈I, (F ◦ g)′(x) = F′(g(x)) · g ′(x) = f (g(x)) · g ′(x).Autrement dit, la fonction x 7→ f (g(x)) · g ′(x) admet la fonction F ◦ g comme primitive sur I.D’où ∫ b
af (g(t)).g ′(t)dt = F(g(b))− F(g(a))
Finalement, on obtient ∫ b
af (g(t)) · g ′(t)dt =
∫ g(b)
g(a)f (u)du
cqfd
Remarque 33. En pratique, dans l’intégrale∫ b
af (g(t)).g ′(t)dt on pose g(t) = u et du = g ′(t)dt.
Pour les bornes de l’intégrale on remplace a par g(a) et b par g(b).
L’intégrale est alors remplacée par :∫ g(b)
g(a)f (u)du.
Exemple 44. Calculons I =∫ e2
e
1t ln t
dt.
On pose : u = ln t, on a donc : g(t) = ln t et g ′(t) =1t
(ainsi du =1t
dt).
D’où1
t ln t= f (g(t))g ′(t) avec f (x) =
1x
.
Pour les bornes : t = e donne u = lne = 1 et t = e2 donne u = lne2 = 2La fonction g est bien de classe C1 sur l’intervalle
[e,e2
]et on a : g
([e,e2
])= [1,2].
La fonction f est continue sur l’intervalle [1,2].Par conséquent, nous pouvons appliquer le théorème d’intégration par changement de variable.
I =∫ e2
e
1t ln t
dt =∫ e2
e
1ln t
(1t
dt)
=∫ 2
1
1u
du = [ln(u)]21 = ln(2)
Exemple 45. Soient α et β deux nombres réels strictement positifs et I =∫ β
1
1t
dt.
On sait que I = [ln t]β1 = lnβ.
D’autre part, on a : I =∫ β
1
1αtαdt.
On pose : u = g(t) = αt, par conséquent, on obtient : I =∫ β
1f (g(t)).g ′(t)dt avec f (u) =
1u
.
La fonction g est de classe C1 sur l’intervalle [1,β] (ou sur [β,1] suivant le cas) et la fonction f est continue sur I = [α,αβ](ou [αβ,α]). On peut donc appliquer le théorème de changement de variable et on obtient :
I =∫ g(β)
g(1)f (u)du =
∫ αβ
α
1u
du =∫ αβ
α
1u
du = [lnu]αβα = ln(αβ)− lnα.
On en déduit la relation : ln(αβ) = lnα+ lnβ.
41 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
10 Exemples d’intégrales généralisées
10.1 Exemples
Dans le cadre de ce cours, notre étude se limite aux intégrales de fonctions continues par morceaux, sur des intervallesfermés bornés. De manière plus générale et sous certaines conditions, la notion d’intégrale peut s’étendre à desintervalles non bornés et/ou non fermés.C’est ce que nous allons évoquer dans ce paragraphe à travers l’étude de différents exemples.
Exemple 46. La fonction f définie sur R par f (t) = e−t est continue sur R.
Par conséquent, la fonction G : x 7→ G(x) =∫ x
0e−t dt est définie sur R.
Recherchons : limx→+∞
G(x).
Nous avons : limx→+∞
G(x) = limx→+∞
∫ x
0e−t dt = lim
x→+∞
[−e−t
]x0
= limx→+∞
(1− e−x) = 1.
Cette limite existe et est finie, nous dirons donc que l’intégrale généralisée∫ +∞
0e−t dt est convergente et vaut 1.
Nous noterons :∫ +∞
0e−t dt = 1.
0
1
x
G(x)
Cf
∫ +∞0 f(x)dx = 1
Cf
Interprétation graphique de G(x) Interprétation graphique de∫ +∞
0f (x)dx = 1
Exemple 47. Soit f la fonction définie sur R par f (t) = et .
Cette fonction est continue sur R. Par conséquent, la fonction G : x 7→ G(x) =∫ x
0et dt est définie sur R.
Recherchons : limx→+∞
G(x).
Nous avons : limx→+∞
G(x) = limx→+∞
∫ x
0et dt = lim
x→+∞
[et]x0
= limx→+∞
(ex − 1) = +∞.
Cette limite est infinie, nous dirons donc que l’intégrale généralisée∫ +∞
0et dt est divergente.
Exemple 48. Soit f la fonction définie sur[0,1[ par f (t) =1
√1− t
.
Recherchons : limx→1−
G(x).
Nous avons : limx→1−
G(x) = limx→1−
∫ x
0
1√
1− tdt = lim
x→1−
[−2√
1− t]x0
= limx→1−
(−2√
1− x+ 2)
= 2.
Cette limite existe et est finie, nous dirons donc que l’intégrale généralisée∫ 1
0
1√
1− tdt est convergente et vaut 2.
Nous noterons :∫ 1
0
1√
1− tdt = 2.
42 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Figure 22 – Interprétation graphique de G(x)
Figure 23 – Interprétation graphique de∫ 1
0f (x)dx = 2
Exemple 49.
Soit f la fonction définie sur [0,1[ par f (t) =1
(1− t)2 .
Cette fonction est continue sur [0,1[, par conséquent, la fonction G : x 7→ G(x) =∫ x
0
1(1− t)2 dt est définie sur [0,1[.
Recherchons : limx→1−
G(x).
Nous avons : limx→1−
G(x) = limx→1−
∫ x
0
1(1− t)2 dt = lim
x→1−
[ 11− t
]x0
= limx→1−
( 11− x
− 1)
= +∞.
Cette limite est infinie, nous dirons donc que l’intégrale généralisée∫ 1
0
1(1− t)2 dt est divergente.
10.2 Remarques
Par définition, nous dirons que :
- l’intégrale généralisée∫ +∞
af (t)dt (respectivement,
∫ b
−∞f (t)dt) est convergente si lim
x→+∞
∫ x
af (x)dx (respective-
ment limx→−∞
∫ b
xf (x)dx) existe et est finie.
43 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
- l’intégrale généralisée∫ +∞
−∞f (t)dt est convergente s’il existe deux nombres réels a et b tels que
∫ a
−∞f (t)dt et∫ +∞
bf (t)dt soient convergentes et si
∫ b
af (t)dt existe.
On aura alors :∫ +∞
−∞f (t)dt =
∫ a
−∞f (t)dt +
∫ b
af (t)dt +
∫ +∞
bf (t)dt.
11 Applications de l’intégration
11.1 Indice de Gini
Pour l’INSEE, l’indice (ou coefficient) de Giniindice (ou coefficient) de Gini est un indicateur synthétique d’inégalités de salaires (de revenus, deniveaux de vie...). Il varie entre 0 et 1. Il est égal à 0 dans une situation d’égalité parfaite où tous les salaires, lesrevenus, les niveaux de vie... seraient égaux. À l’autre extrême, il est égal à 1 dans une situation la plus inégalitairepossible, celle où tous les salaires (les revenus, les niveaux de vie...) sauf un seraient nuls. Entre 0 et 1, l’inégalité estd’autant plus forte que l’indice de Gini est élevé.On peut obtenir l’indice de Gini à partir de la courbe de Lorenz qui représente la part détenue d’une grandeur enfonction de la part des détenteurs de cette valeur.
Exemple 50. Voici la répartition du patrimoine en France en 2010.
On peut alors tracer la courbe de Lorenz suivante :
La première bissectrice représente une situation parfaitement égalitaire :
44 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Si l’on note f la fonction dont la courbe représentative est la courbe de Lorenz, on peut donner comme définition àl’Indice de Gini la valeur suivante :
G = 1− 2∫ 1
0f (t)dt
L’indice de Gini étant le rapport entre l’aire entre la courbe de Lorenz et la première bissectrice et l’aire du triangleformé par la première bissectrice, on a
G =
∫ 10 t − f (t)dt
1/2=
1/2−∫ 1
0 f (t)dt
1/2= 1− 2
∫ 1
0f (t)dt
Exemple 51. Calculer l’indice de Gini si la courbe de Lorenz à pour équation y = x4−x3+x. G = 1− 2∫ 1
0x4 − x3 + xdx = 0,1 = 1/10
Exemple 52. Estimer l’indice de Gini pour le revenu en Norvège en 2004 à partir du tableau suivant :
Proportion cumulée de la population 10% 20% 80% 90%Part du revenu agrégé total 3,9 9,6 66,8 77,4
rapportrapport mondial sur le développement humain 2004
11.2 Capitalisation continue
On s’intéresse à un capital C0 placé avec un intérêt composé i sur une période donnée.Au bout de t périodes, la valeur du capital est
C0(1 + i)t
45 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
En décomposant l’intervalle [0, t] en kt intervalles de longueur tk pour lesquels on applique des taux proportionnels i
k ,on obtient :
C0(1 +i
k)(k·t)
Considérer une capitalisation continue revient à faire tendre t vers +∞.
C0(1 +i
k)(k·t) = C0 exp(kt ln(1 +
i
k))
Lorsque k est grand ik est proche de 0, en utilisant l’approximation affine de la fonction logarithme au voisinage de 1,
on obtient :
limk→+∞
C0(1 +i
k)(k·t) = lim
k→+∞C0 exp(kt × i
k) = C0 exp(ti).
Ainsi considérer la capitalisation continue d’un capital C0 donne :
C = C0eti
Dans cette situation la valeur moyenne de l’actif sur une période donnée s’obtient par :
Cm =1T
∫ T
0C0 exp(it)dt =
C0
Ti[exp(it)]T
0 =C0(exp(iT)− 1)
Ti
Exemple 53. On place un capital de 10 000 € à 0,75% par an. On suppose la capitalisation continue. Quelle est la valeurmoyenne du capital sur les 6 premiers mois du placement?
11.3 Excédent consommateur
Soit f la fonction de demande d’un produit que l’on suppose décroissante.L’excédent consommateur est est un gain monétaire qui est calculé grâce à la différence entre ce que le consommateurest prêt à payer pour un bien ou un service et le prix qu’il paye effectivement.C’est une évaluation monétaire de la satisfaction du consommateur à payer un prix moins élevé que ce qu’il était prêtà payer.
Cet excédent s’exprime par : ∫ q
0f (t)dt − p × q
46 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Exemple 54. Calculer l’excédent consommateur lorsque que la fonction de demande est x 7−→ 24− 2x − x2 et que la quantitédemandée est q = 3.En utilisant la définition, on obtient :
EC =∫ 3
024− 2x − x2 dx − 3× (24− 2× 3− 32) = 27
11.4 Coût marginal
Exemple 55. Supposons que le coût marginal d’une usine est donné par la fonction q 7−→ 3exp(q/5). Sachant que que l’usinea un coût fixe de 90 unité monétaires, déterminer le coût total en fonction du nombre q d’unité de production.
12 Compléments
12.1 Formule de Taylor avec reste intégral
Le théorème fondamental du calcul intégral donne, si f est de classe C1 sur l’intervalle [a;b]∫ b
af ′(t)dt = f (b)− f (a).
Cette formule peut se ré-écrire :
f (b) = f (a) +∫ b
af ′(t)dt
Si maintenant, on suppose f de classe C2, une intégration par partie nous donne :
f (b) = f (a) +[(t − b)f ′(t)
]ba −
∫ b
a(t − b)f ′′(t)dt = f (a) + (b − a)f ′(a)−
∫ b
a(t − b)f ′′(t)dt
Remarque 34. On a posé :u(t) = f (t) u′(t) = f ′(t)v′(t) = 1 v(t) = t − b
On retrouve l’approximation affine de f en a (f (b) ' f (a) + (b−a)f ′(a)) avec en plus une évaluation du reste sous formed’intégrale. On appelle cette formule, la formule de Taylor avec reste intégral.De la même manière (avec une pincée de récurrence), on montre le théorème suivant :
47 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Théorème 18 (Formule de Taylor avec reste intégral). Soit f une fonction de classe Cn+1 sur un intervalle [a;b].
f (b) = f (a) + (b − a)f ′(a) +(b − a)2
2f ′′(a) + · · ·+ (b − a)n
n!f (n)(a) +
∫ b
a
f (n+1)
n!(b − t)n dt
O
Exemple 56. Montrer que pour tout réel x
limn→+∞
n∑k=0
xk
k!= exp(x)
Exemple 57. Au chapitre 7, on a énoncé le théorème suivant :Soit f une fonction définie sur un ensemble D de R2 et X0 ∈ D. Si les dérivées partielles de f existent et sontcontinues en X0, f est différentiable en X0.
Références
1. C. P. Simon, Mathématiques pour économistes, avec la coll. de L. Blume, G. Dufrénot, O. Ferrier, M. Paul, V.Darmon (De Boeck université, Paris Bruxelles, 1998), xii+980, isbn : 978-2-7445-0004-6.
2. G. Archinard, Analyse mathématique pour économistes : cours et exercices corrigés, avec la coll. de B. Guerrien(Economica, Paris, 4e éd.. 1992), 669 p., isbn : 978-2-7178-2240-3.
3. Y. Dodge, Mathématiques de base pour économistes (Springer, Paris ; New York, 2002 edition, 27 sept. 2007), 379 p.,isbn : 978-2-287-74940-7.
4. O. Ferrier, Maths pour économistes : l’analyse en économie et gestion (De Boeck, Bruxelles, 2007), 468 p., isbn :978-2-8041-5491-2.
5. G.-P. Mafouta-Bantsimba, Mathématiques pour l’économie : méthodes et exercices corrigés LMD (De Boeck, De Boeckuniversité, Bruxelles, 2005), 350 p., isbn : 978-2-8041-4874-4.
6. G. Poulalion, G. Pupion, Les mathématiques de l’économiste, Cours, exercices corrigés, applications à l’analyseéconomique (Vuibert, Paris, 3e edition, 2004), 552 p., isbn : 9782711775439.
7. K. Sydsaeter, Mathématiques pour l’économie, avec la coll. de P. J. Hammond et al. (Pearson, Montreuil, 4e édition.2014), xii+690, isbn : 978-2-326-00032-2.
Références
1. C. P. Simon, Mathématiques pour économistes, avec la coll. de L. Blume, G. Dufrénot, O. Ferrier, M. Paul, V.Darmon (De Boeck université, Paris Bruxelles, 1998), xii+980, isbn : 978-2-7445-0004-6.
2. G. Archinard, Analyse mathématique pour économistes : cours et exercices corrigés, avec la coll. de B. Guerrien(Economica, Paris, 4e éd.. 1992), 669 p., isbn : 978-2-7178-2240-3.
3. Y. Dodge, Mathématiques de base pour économistes (Springer, Paris ; New York, 2002 edition, 27 sept. 2007), 379 p.,isbn : 978-2-287-74940-7.
4. O. Ferrier, Maths pour économistes : l’analyse en économie et gestion (De Boeck, Bruxelles, 2007), 468 p., isbn :978-2-8041-5491-2.
5. G.-P. Mafouta-Bantsimba, Mathématiques pour l’économie : méthodes et exercices corrigés LMD (De Boeck, De Boeckuniversité, Bruxelles, 2005), 350 p., isbn : 978-2-8041-4874-4.
6. G. Poulalion, G. Pupion, Les mathématiques de l’économiste, Cours, exercices corrigés, applications à l’analyseéconomique (Vuibert, Paris, 3e edition, 2004), 552 p., isbn : 9782711775439.
7. K. Sydsaeter, Mathématiques pour l’économie, avec la coll. de P. J. Hammond et al. (Pearson, Montreuil, 4e édition.2014), xii+690, isbn : 978-2-326-00032-2.
48 M. Pelini, V. Ledda

Fonction de deux variables Analyse 2
Éléments de correction
Les éléments de correction n’ont pas pour objectif de donner un corrigé type. Parfois la rédaction est volontairement lacunaire,c’est au lecteur de combler les manques pour parfaire sa compréhension des sujets abordés.
49 M. Pelini, V. Ledda