Embed Size (px)
Citation preview

Formation Ingénieur 2000,filière « Génie Energétique ».
Ecoulements multiphasiques, partie BEcoulements en conduite: méthodes d’ingénierie classiques.1
F. Raveletaa Arts et Metiers ParisTech, DynFluid,
151 boulevard de l’Hôpital, 75013 Paris, France.contact: [email protected]
20 novembre 2014
1Ce document a été écrit en LATEX, en utilisant la distribution GNU/Linux Ubuntu (http://www.ubuntu-fr.org/).
ii TABLE DES MATIÈRES
Table des matières
1 Remarques préliminaires 11.1 Applications industrielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Nécéssité d’une modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3 Difficultés liées à la modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Limites de toute modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Paramètres descriptifs 52.1 Paramètres de contrôle globaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Titres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Vitesses superficielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Débit massique surfacique . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Relations immédiates entre ces grandeurs . . . . . . . . . . . . . . . . . . 6
2.2 Paramètres décrivant l’état adopté par le système . . . . . . . . . . . . . . . . . . 6Opérateurs de moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Fonction indicatrice de phase . . . . . . . . . . . . . . . . . . . . . . . . . 7Fraction volumique (taux de vide) . . . . . . . . . . . . . . . . . . . . . . 7Vitesses moyennes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Différence entre titre volumique et fraction volumique . . . . . . . . . . . 9Notations en diphasique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Identités remarquables en diphasique . . . . . . . . . . . . . . . . . . . . . 9
2.3 Exemple illustrant la différence entre α et β . . . . . . . . . . . . . . . . . . . . . 10
3 Techniques de mesures 133.1 Fonction indicatrice de phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Fraction volumique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Mesure de capacité. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Méthode par atténuation de rayons γ. . . . . . . . . . . . . . . . . . . . . 15
3.3 Débits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Les méthodes par séparation des phases . . . . . . . . . . . . . . . . . . . 17Les méthodes de mesures en ligne . . . . . . . . . . . . . . . . . . . . . . 17
3.4 Vitesses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Tube de Pitot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Particle Image Velocimetry et méthodes dérivées . . . . . . . . . . . . . . 18Phase Doppler Anemometry . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Configurations 194.1 Ecoulements verticaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Description des régimes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Ecoulements verticaux avec changement de phase . . . . . . . . . . . . . . 21Cartes de prédiction des régimes . . . . . . . . . . . . . . . . . . . . . . . 21
20 novembre 2014

TABLE DES MATIÈRES iii
4.2 Ecoulements horizontaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Description des régimes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Ecoulements horizontaux transportant des solides . . . . . . . . . . . . . . 24Ecoulements horizontaux avec changement de phase . . . . . . . . . . . . 24Cartes de prédiction des régimes en écoulement liquide / gaz . . . . . . . 24Prédiction du régime en transport solide . . . . . . . . . . . . . . . . . . . 26
5 Modélisation 275.1 Rappels sur l’établissement de bilans intégrés sur la section de conduite . . . . . 28
Bilan de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Bilan de quantité de mouvement . . . . . . . . . . . . . . . . . . . . . . . 29Bilan d’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Bilans en écoulements multiphasiques . . . . . . . . . . . . . . . . . . . . . . . . 31Equations de bilan moyennées sur la section de la conduite — versionsimplifiée, en conduite de section constante . . . . . . . . . . . . . . . . . 31Modèle homogène en écoulement diphasique . . . . . . . . . . . . . . . . . 32
5.3 Détermination de la fraction volumique . . . . . . . . . . . . . . . . . . . . . . . 33Modèle homogène . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Cas général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Friction en modèle homogène . . . . . . . . . . . . . . . . . . . . . . . . . 35Autres modèles de friction pour écoulements dispersés . . . . . . . . . . . 37Friction en modèle séparé . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
A Annexes 41a Lien entre fraction volumique, vitesses moyennes et titre massique . . . . . . . . 41b Vitesse terminale d’une particule solide . . . . . . . . . . . . . . . . . . . . . . . 41c Réponse au problème posé au § 2.3, p. 10 . . . . . . . . . . . . . . . . . . . . . . 42d Code Matlab pour la méthode de Taitel en écoulement vertical . . . . . . . . . . 43
Bibliographie 45
20 novembre 2014

iv TABLE DES FIGURES
Table des figures1 Exemples industriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 Exemples de régimes d’écoulements . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Fonction indicatrice de phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 Fraction volumique instantanée . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85 Illustration de la différence entre titre volumique et fraction volumique . . . . . . 96 Deux notions différentes de « concentration » . . . . . . . . . . . . . . . . . . . . 107 Sonde résistive, sonde optique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138 Wire-mesh sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149 Sonde capacitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1510 Atténuation de rayonnement γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1611 Débimètre en ligne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1712 Ecoulement vertical co-courant ascendant air / eau . . . . . . . . . . . . . . . . . 2013 Ecoulement eau / vapeur vertical avec apport de chaleur . . . . . . . . . . . . . . 2014 Cartes de régime pour écoulements air / eau en conduite verticale . . . . . . . . 2215 Régimes en écoulement horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . 2316 Ecoulement eau / vapeur horizontal avec apport de chaleur . . . . . . . . . . . . 2517 Carte de régime pour écoulements air / eau en conduite horizontale . . . . . . . 2518 Exemple type de courbe de perte de charge . . . . . . . . . . . . . . . . . . . . . 2719 Tronçon élémentaire de conduite . . . . . . . . . . . . . . . . . . . . . . . . . . . 2820 Corrélations pour la fraction volumique . . . . . . . . . . . . . . . . . . . . . . . 3421 Test du modèle homogène en transport solide . . . . . . . . . . . . . . . . . . . . 3622 Test de la corrélation de Lockhart & Martinelli . . . . . . . . . . . . . . . . . . . 4023 Trainée d’une sphère . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
20 novembre 2014
1. Remarques préliminaires 1
1 Remarques préliminaires1.1 Applications industrielles
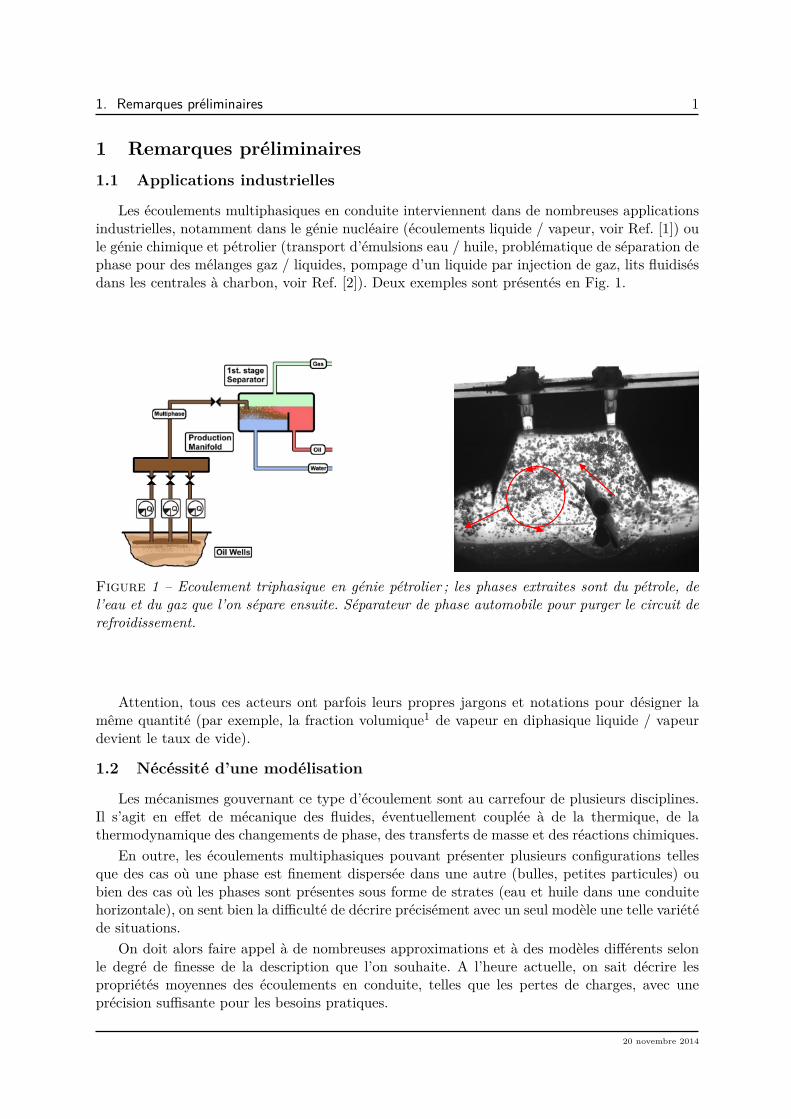
Les écoulements multiphasiques en conduite interviennent dans de nombreuses applicationsindustrielles, notamment dans le génie nucléaire (écoulements liquide / vapeur, voir Ref. [1]) oule génie chimique et pétrolier (transport d’émulsions eau / huile, problématique de séparation dephase pour des mélanges gaz / liquides, pompage d’un liquide par injection de gaz, lits fluidisésdans les centrales à charbon, voir Ref. [2]). Deux exemples sont présentés en Fig. 1.
Figure 1 – Ecoulement triphasique en génie pétrolier ; les phases extraites sont du pétrole, del’eau et du gaz que l’on sépare ensuite. Séparateur de phase automobile pour purger le circuit derefroidissement.
Attention, tous ces acteurs ont parfois leurs propres jargons et notations pour désigner lamême quantité (par exemple, la fraction volumique1 de vapeur en diphasique liquide / vapeurdevient le taux de vide).
1.2 Nécéssité d’une modélisation
Les mécanismes gouvernant ce type d’écoulement sont au carrefour de plusieurs disciplines.Il s’agit en effet de mécanique des fluides, éventuellement couplée à de la thermique, de lathermodynamique des changements de phase, des transferts de masse et des réactions chimiques.
En outre, les écoulements multiphasiques pouvant présenter plusieurs configurations tellesque des cas où une phase est finement dispersée dans une autre (bulles, petites particules) oubien des cas où les phases sont présentes sous forme de strates (eau et huile dans une conduitehorizontale), on sent bien la difficulté de décrire précisément avec un seul modèle une telle variétéde situations.
On doit alors faire appel à de nombreuses approximations et à des modèles différents selonle degré de finesse de la description que l’on souhaite. A l’heure actuelle, on sait décrire lespropriétés moyennes des écoulements en conduite, telles que les pertes de charges, avec uneprécision suffisante pour les besoins pratiques.
20 novembre 2014
2 1. Remarques préliminaires
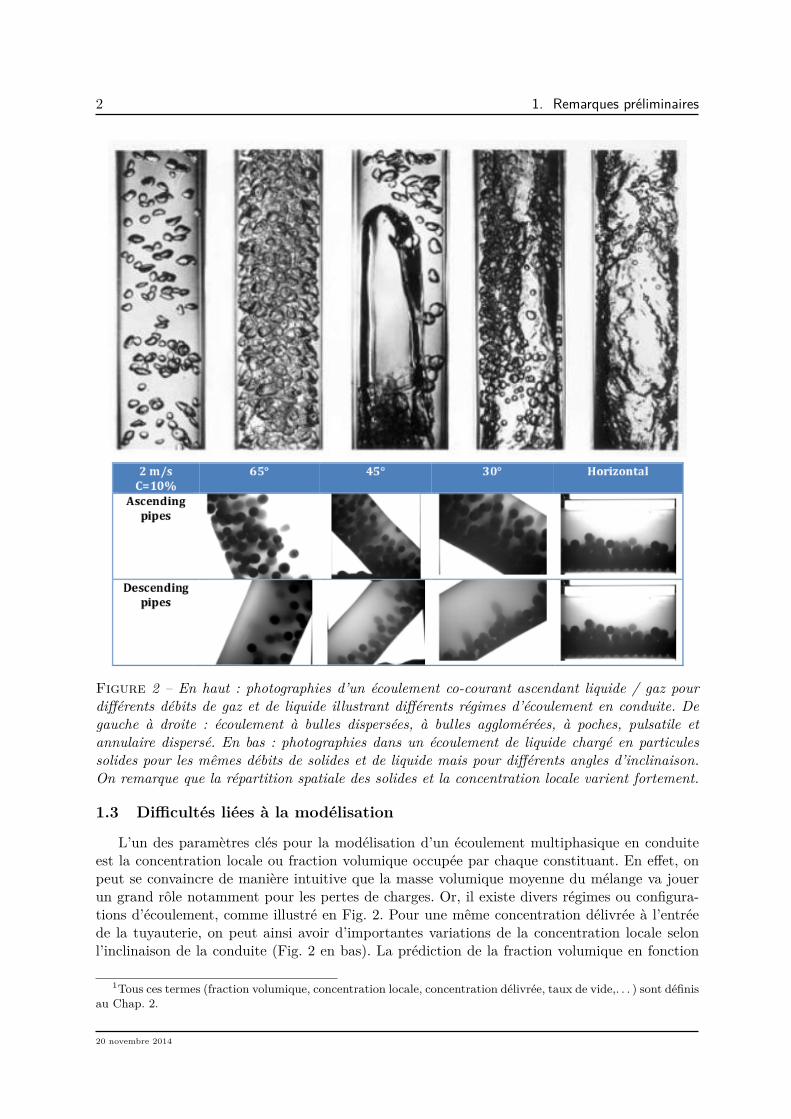
Figure 2 – En haut : photographies d’un écoulement co-courant ascendant liquide / gaz pourdifférents débits de gaz et de liquide illustrant différents régimes d’écoulement en conduite. Degauche à droite : écoulement à bulles dispersées, à bulles agglomérées, à poches, pulsatile etannulaire dispersé. En bas : photographies dans un écoulement de liquide chargé en particulessolides pour les mêmes débits de solides et de liquide mais pour différents angles d’inclinaison.On remarque que la répartition spatiale des solides et la concentration locale varient fortement.
1.3 Difficultés liées à la modélisation
L’un des paramètres clés pour la modélisation d’un écoulement multiphasique en conduiteest la concentration locale ou fraction volumique occupée par chaque constituant. En effet, onpeut se convaincre de manière intuitive que la masse volumique moyenne du mélange va jouerun grand rôle notamment pour les pertes de charges. Or, il existe divers régimes ou configura-tions d’écoulement, comme illustré en Fig. 2. Pour une même concentration délivrée à l’entréede la tuyauterie, on peut ainsi avoir d’importantes variations de la concentration locale selonl’inclinaison de la conduite (Fig. 2 en bas). La prédiction de la fraction volumique en fonction
1Tous ces termes (fraction volumique, concentration locale, concentration délivrée, taux de vide,. . . ) sont définisau Chap. 2.
20 novembre 2014
1. Remarques préliminaires 3
des paramètres du système est donc capitale, mais repose essentiellement sur des corrélationsempiriques, qui sont loin d’être universelles (voir par exemple la Ref. [3] pour du diphasiquegaz /liquide).
Parmi le grand nombre de paramètres contrôlant les régimes en écoulements multiphasiquesen conduite, on peut citer :
— Les débits massiques de chaque phase ;
— Un éventuel apport de chaleur ;
— Les propriétés physiques de chaque phase (masse volumique, viscosité, capacité calorifique,conductivité thermique, tension de surface,. . . ) ;
— La géométrie de la conduite (forme et aire de la section) ;
— L’inclinaison de la conduite et le sens des écoulements par rapport à la gravité.
Du point de vue expérimental, si des méthodes de mesures très sophistiquées permettent desmesures précises, résolues en temps et en espace et non intrusives des principales grandeurs phy-siques en écoulement monophasique, c’est loin d’être le cas pour les écoulements polyphasiques.Les données locales fournies par les modèles (par exemple le taux de vide) s’avèrent alors difficilesà valider expérimentalement.
1.4 Limites de toute modélisation
Un modèle est une représentation d’une réalité restreinte de la nature. Un modèle est faitpour décrire, interpréter et prévoir des événements dans le cadre de cette réalité et ne s’appliquequ’à un nombre limité de phénomènes. Un modèle n’est pas la réalité.
Le modèle se substitue parfois à la théorie à cause de sa simplicité relative. Il a donc commerôle de décrire une réalité complexe de manière simple et compréhensible. Par exemple, en chimie,on peut expliquer bien des réactions à partir du modèle atomique simplifié, sans avoir à utiliserla théorie de la mécanique quantique. Pour citer M. Planck [4] :
« Que nous déclarions avec Ptolémée : la Terre est le centre immobile de l’univers et le Soleiltourne autour d’elle avec toutes les étoiles, ou que nous disions avec Copernic, la Terre est ungrain de poussière dans le cosmos qui tourne en un jour sur lui-même et en un an autour du Soleil,ces deux assertions ne sont [...] que deux manières différentes de formuler des observations ».On préfère généralement prendre le modèle héliocentré pour décrire le mouvement de la planèteMars par commodité.
Enfin, il faut garder à l’esprit que les modèles employés ne sont souvent valides que dansdes gammes restreintes de paramètres. Voici deux exemples significatifs, en écoulements mono-phasiques, de considérations très pratiques mais s’avérant fausses dans le cas du génie nucléaire,où les variations de températures et de pressions dans les différents circuits sont très fortes :
— L’eau est « incompressible » : le débit volumique se conserve.Faux : pour le circuit primaire la masse volumique de l’eau à 155 bars varie de 10% entre280oC et 320oC2. Le débit volumique ne se conserve donc pas. Seul le débit massique seconserve. D’ailleurs, aucun fluide n’est « incompressible », on ne devrait jamais parler quede fluide en écoulement compressible ou incompressible.
2D’après le NIST (http://webbook.nist.gov/chemistry/fluid/), à 155 bars et 280oC, ρ = 764.3 kg.m−3 età 155 bars et 320oC, ρ = 680.2 kg.m−3
20 novembre 2014
4 1. Remarques préliminaires
— La vapeur d’eau est un gaz parfait.A 1 bar et 100oC, c’est quasiment le cas : le calcul de la masse volumique pour un gazparfait de constante r = 462 J.K−1.kg−1 donne ρ = 5.8 kg.m−3 et la mesure ρ = 5.9 kg.m−3
soit 1.5% d’écart.Mais à 60 bars et 275oC (pression en sortie du générateur de vapeur dans un Réacteurà Eau sous Pression du palier 900 MWe) ce n’est plus du tout vrai : le calcul pour ungaz parfait donne une masse volumique ρv = 23.7 kg.m−3 alors qu’en réalité elle est de30.8 kg.m−3, soit un écart de 30%.
Objectifs des démarches abordées dans ce cours
De ce qui précède, on peut conclure que la modélisation des écoulements multiphasiques enconduite n’est pas chose aisée, et doit être maniée avec un grand sens critique.
L’objet des modèles présentés dans ce cours est de fournir des valeurs moyennes dans laconduite des vitesses, concentrations, et pressions, à partir de bilans globaux. Les notions surles moyennes et les paramètres utilisés sont tout d’abord abordées au § 2, puis les méthodes demesures de ces différentes quantités le sont au § 3. Les principales configurations d’écoulementsmultiphasiques observées sont décrites au § 4. Enfin, les principales équations de bilan établiespour les grandeurs moyennées et les relations de fermeture des modèles sont développées au § 5.Pour aller au delà (autres moyennes de type statistique ou filtrées « à la LES », modèles pourles moyennes et les variances des quantités), on pourra consulter la Ref. [2].
20 novembre 2014

2. Paramètres descriptifs 5
2 Paramètres descriptifsAfin de décrire un écoulement multiphasique en conduite, outre des données géométriques et
les propriétés physiques des fluides, un certain nombre de paramètres concernant l’écoulementsont nécessaires, comme des vitesses ou bien des concentrations. La première question est doncde bien préciser ces différents paramètres.
Plaçons nous dans un cas où l’on maîtrise les débits de matière de plusieurs phases à l’en-trée d’une conduite, sans transferts de masse entre phases, et à propriétés physiques des phasesconstantes. Nous distinguerons alors deux types de paramètres : ceux que l’on contrôle (para-mètres de contrôle) et ceux que le système adopte1 (paramètres d’ordre).
Le choix adopté ici de présentation des paramètres décrivants un écoulement multiphasiqueest arbitraire. Une autre présentation plus classique et universelle [2] consiste à partir de ladescription la plus locale2 pour finalement, par des opérations de moyennes spatiales et / outemporelles, arriver à des paramètres descriptifs globaux.
2.1 Paramètres de contrôle globaux
On considère N phases indicées par i = 1...N s’écoulant dans une conduite de section A(z)(z est une coordonnée curviligne le long de l’axe de la conduite). Les débits volumiques sontnotés Qi, les masses volumiques sont notées ρi. Les débits massiques sont notés Mi. On a ainsi :
Mi = ρiQi
On notera :Q =
∑i=1...N
Qi etM =∑
i=1...NMi
Ces quantités représentent les débits volumiques et massiques du mélange.
Titres
Les titres volumiques βi et massiques χi sont des paramètres globaux définis à partir desdébits. Pour le titre volumique, parfois appelé « concentration de transport » ou « concentrationdélivrée », la définition est la suivante :
βi = QiQ
Et pour le titre massique3 :
χi = Mi
M
On a en outre les relations immédiates :
∑i=1...N
βi =∑
i=1...Nχi = 1
1Nous avons ainsi vu au § 1.3 qu’il pouvait exister différentes notions de concentrations dans un écoulementmultiphasique, notamment à cause de l’existence de nombreuses configurations d’écoulements et de « glissement »entre les phases (différences de vitesse).
2Voir partie A du cours de V. Daru pour la forme locale des équations.3Cette notion rejoint la notion de titre thermodynamique dans le cas d’un écoulement avec changement de
phase à l’équilibre thermodynamique.
20 novembre 2014

6 2. Paramètres descriptifs
Vitesses superficielles
Pour la phase i, on définit :Ji = Qi
A
Son interprétation est la suivante : il s’agit de la vitesse qu’aurait la phase i si elle s’écoulaitseule dans toute la conduite. On définit également la vitesse de mélange :
J =∑
i=1...NJi
Il s’agit d’une vitesse déduite et elle n’a de signification physique qu’en cas d’écoulementhomogène et de non-glissement entre les phases.
Débit massique surfacique
Par abus de langage, on parle aussi de « vitesse massique ». On définit :
Gi = Mi
A
On définit aussi le débit massique surfacique du mélange :
G =∑
i=1...NGi
Relations immédiates entre ces grandeurs
Ji = βiJ
Gi = Gχi
Gi = ρiJi
2.2 Paramètres décrivant l’état adopté par le système
Opérateurs de moyenne
Avant d’introduire les différents paramètres utilisés pour décrire en moyenne l’état du sys-tème en écoulements multiphasiques, il est nécessaire de préciser les moyennes considérées.
Moyenne temporelle
On peut définir pour toute quantité f(x, t) définie au point x et au temps t une moyennesur un intervalle de temps T par :
f(x, t) = 1T
∫ t+T/2
t−T/2f(x, t′)dt′
Cet intervalle de temps T est choisi grand devant les fluctuations que l’on veut lisser (duesà la turbulence par exemple), mais petit devant les variations temporelles globales que l’onsouhaite étudier, par exemple celles dues à des variations contrôlées des débits alimentant lesystème considéré.
20 novembre 2014

2. Paramètres descriptifs 7
Moyenne spatiale
De même, on peut moyenner toute variable locale instantanée sur un segment, une surfaceou un volume. En pratique, on considérera des moyennes sur les sections de conduites A(z) :
〈f(z, t)〉z = 1A(z)
∫A(z)
f(x, t)ds
Fonction indicatrice de phase
En tout point x et à tout instant t dans la conduite, on définit pour une phase i la fonctionindicatrice de phase
Xi(x, t) ={
1 ⇔ x ∈ i0 ⇔ x 6∈ i
Figure 3 – Exemple de fonction indicatrice de phase.
Il s’agit d’une quantité mesurable, par différents moyens présentés au Chap. 3. Un exemplede fonction indicatrice de phase est tracé en Fig. 3. On peut noter qu’il s’agit d’une fonctioncontinue par morceaux.
Fraction volumique (taux de vide)
La fraction volumique locale αloci (x), appelée également taux de vide dans le cas particulierd’un écoulement liquide / vapeur, est la moyenne temporelle de Xi(x, t) :
αloci = Xi(x, t)
La fraction volumique instantanée αinsti (z, t) est la moyenne spatiale de Xi(x, t) sur la sectionde conduite de cote z :
αinsti = 〈Xi(x, t)〉z = 1A
∫AXi(x, t)ds
Celle-ci a une interprétation géométrique simple. En notant ai(z, t) la section de conduiteoccupée par la phase i au temps t, on a (voir Fig. 4) :
αinsti = ai(z, t)A
Enfin, on définit la fraction volumique globale comme la moyenne spatiale et temporelle dela fonction indicatrice de phase (on peut montrer que ces deux opérateurs commutent pour la
20 novembre 2014

8 2. Paramètres descriptifs
Figure 4 – Fraction volumique instantanée de la phase blanche = somme des aires blanches /aire de la section de conduite.
fonction Xi, voir Ref. [1]) :αi = 〈αloci 〉z = αinsti
Sauf mention contraire, dans la suite du manuscrit, c’est cette fraction volumique globalequi sera utilisée. De même, les autres quantités seront des quantités moyennées spatialementsur la section de conduite et moyennées temporellement. Pour ne pas alourdir les notations, onomettra les symboles • et 〈•〉z et on utilisera des capitales pour les grandeurs moyennées.
La fraction volumique n’est pas maîtrisée : c’est la configuration de l’écoulement qui la fixe.A géométrie, fluides et configuration thermodynamique donnés, on a :
αi = f(J, βi...N ) = g(M,χi...N )
Vitesses moyennes
Si on note w(x, t) la composante selon l’axe de la conduite de la vitesse au point x et autemps t, la vitesse selon l’axe de la conduite de la phase i en ce point est Xi(x, t)w(x, t) (c’est-à-dire w(x, t) si en ce point on est en présence de la phase i, et 0 si en ce point on n’est pas enprésence de la phase i). On écrira wi = Xiw. Le débit volumique instantané de la phase i sur lasection de conduite de cote z est donc :
qi(z, t) =∫A(z)
Xi(x, t)w(x, t)ds
=∫ai(z)
wids
= A〈wi〉z
En prenant la moyenne temporelle, on a :
Qi = A〈wi〉z
= Aiαi〈wi〉z
On introduit alors une « vitesse moyenne pour la phase i » :
Ui = QiAi
= 〈wi〉zαi
Il s’agit donc de la vitesse moyenne débitante de la phase i à travers la portion de conduiteoccupée en moyenne par la phase i.
20 novembre 2014

2. Paramètres descriptifs 9
Différence entre titre volumique et fraction volumique
Figure 5 – Illustration de la différence entre titre volumique et fraction volumique.
Les titres volumiques (βi) et fractions volumiques (αi) correspondent à deux notions deconcentration (resp. « de transport » et « spatiale ») différentes. Ces deux notions ne sont iden-tiques que dans le cas où les vitesses moyennes des phases sont égales. Cela est illustré en Fig. 5pour deux phases repérées par les indices 1 et 2.
La phase 1 occupe une aire A1, la phase 2 une aire A2. La fraction volumique de la phase 1est donc :
α1 = A1A1 +A2
Les deux vitesses moyennes sont U1 et U2. Le débit de la phase 1 est donc Q1 = A1 U1 et letitre volumique de la phase 1 est :
β1 = Q1Q1 +Q2
= A1 U1A1 U1 +A2 U2
On voit que U1 6= U2 ⇒ β1 6= α1.
Notations en diphasique
Traditionnellement, dans un écoulement entre un gaz et un liquide ou bien un écoulementtransportant des solides, on omet l’indice, et on ne considère que le titre du gaz ou des solides.Par exemple, pour de l’air a et de l’eau e, on ne parlera que du titre en air β = βa, le titre eneau étant immédiatement βe = 1 − β. Il en va de même pour les fractions volumiques et titresmassiques.
Identités remarquables en diphasique
Pour un mélange de deux phases 1 et 2, dont on ne considère les titres que relativement àla phase 1, on peut montrer les deux relations suivantes entre le titre massique et la fractionvolumique globale (démonstration en annexe a, page 41) :
χ = 11 + ρ2
ρ1U2U1
(1−α)α
α = 11 + U1
U2(1−χ)χ
ρ1ρ2
20 novembre 2014

10 2. Paramètres descriptifs
De ces deux équations, on peut tirer une expression du « rapport de glissement » (“Slipratio”) S :
S = U1U2
= 1− αα
χ
1− χρ2ρ1
2.3 Exemple illustrant la différence entre α et β
Prenons le cas d’un transport de solides dans une conduite verticale. On suppose connus lesdébits volumiques des solides s et du liquide l, c’est-à-dire que Qs, Ql et β = Qs
Ql+Qs sont connus.On cherche alors à exprimer α (relativement à la phase s) en fonction de ces paramètres et despropriétés des solides et du liquide.
Pour une particule de diamètre d, de masse volumique ρs lachée dans un fluide au repos demasse volumique ρl s’étendant à l’infini, sous l’action de la gravité g, on rappelle que la vitesseterminale en régime permanent s’écrit :
Vt =√ρs − ρlρl
4gd3Cd
avec Cd le coefficient de trainée de la particule (Vous pouvez le démontrer à titre d’exercice :solution en annexe b, page 41).
Exercice : En considérant l’écoulement du fluide comme un écoulement homogène à la vitessemoyenne Ul dirigée vers le haut et que la vitesse moyenne des particules dans ce référentiel estUs = Ul − Vt (voir Fig. 6, gauche), obtenir une relation simple entre la fraction volumique et lavitesse de mélange J .
0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
J (m.s−1
)
α
β=0.05
Figure 6 – Gauche : Illustration du glissement entre deux phases. Droite : Fraction volumiqueα fonction de la vitesse de mélange J pour des sphères en alumine de diamètre 5 mm, de densité3650 kg.m−3 pour un titre volumique (concentration délivrée) de 5%. Ici, Cd = 0.44, coefficientde trainée pour une sphère en régime turbulent, et donc Vt = 0.63 m.s−1.
Commentaires : Sous ces hypothèses, la solution obtenue est illustrée en Fig. 6, droite (voir lasolution du problème en annexe c, page 42). Le tableau 2.1 regroupe quelques valeurs numériques.
On remarque que :
— à haute vitesse, la différence de vitesse entre les phases (qui est constante) devient négli-geable devant les vitesses moyennes, donc
S = UsUl
= Ul − VtUl
= 1− VtUl
20 novembre 2014

2. Paramètres descriptifs 11
Donc S → 1 et α ' β ;
— pour des vitesses de l’ordre de grandeur de la vitesse terminale on a α� β (α = 2β pourJ = 1 m.s−1 dans l’exemple présenté en Fig. 6). Le tuyau se bouche.
J α Js Jl Us Ul
1 11.33% 0.05 0.95 0.44 1.072 7.07% 0.1 1.9 1.41 2.045 5.67% 0.25 4.75 4.406 5.036
Table 2.1 – Résultats du modèle pour quelques valeurs de J et β = 5%. Vitesses en m.s−1.
En toute rigueur, il y a des corrections à apporter en conduite pour l’expression de la vitesseterminale à cause d’effets de confinement, ainsi que des corrections lorsqu’on considère plusieursparticules proches (le sillage des unes perturbe les autres : le comportement collectif est différentdu comportement individuel). En première approximation, on considérera que cette loi restevalable dans le cas du transport solide évoqué ici. Le modèle utilisé ici reflète qualitativementles observations réelles de manière très satisfaisante.
20 novembre 2014

12 2. Paramètres descriptifs
20 novembre 2014
3. Techniques de mesures 13
3 Techniques de mesures expérimentales pour les écoulementsmultiphasiques en conduite
Les quantités d’intérêt à mesurer dans un écoulement multiphasique en conduite sont prin-cipalement les fractions volumiques (α) ainsi que les vitesses de chaque phase et les débits. Pourplus de détails, on pourra consulter les Refs. [2, 5].
3.1 Fonction indicatrice de phase
Afin de mesurer localement le taux de présence d’une phase (voir page 7), on peut dans lecas d’écoulements à plusieurs fluides utiliser des techniques de mesures intrusives, basées sur ladifférence d’une des propriétés physiques des phases en présence.
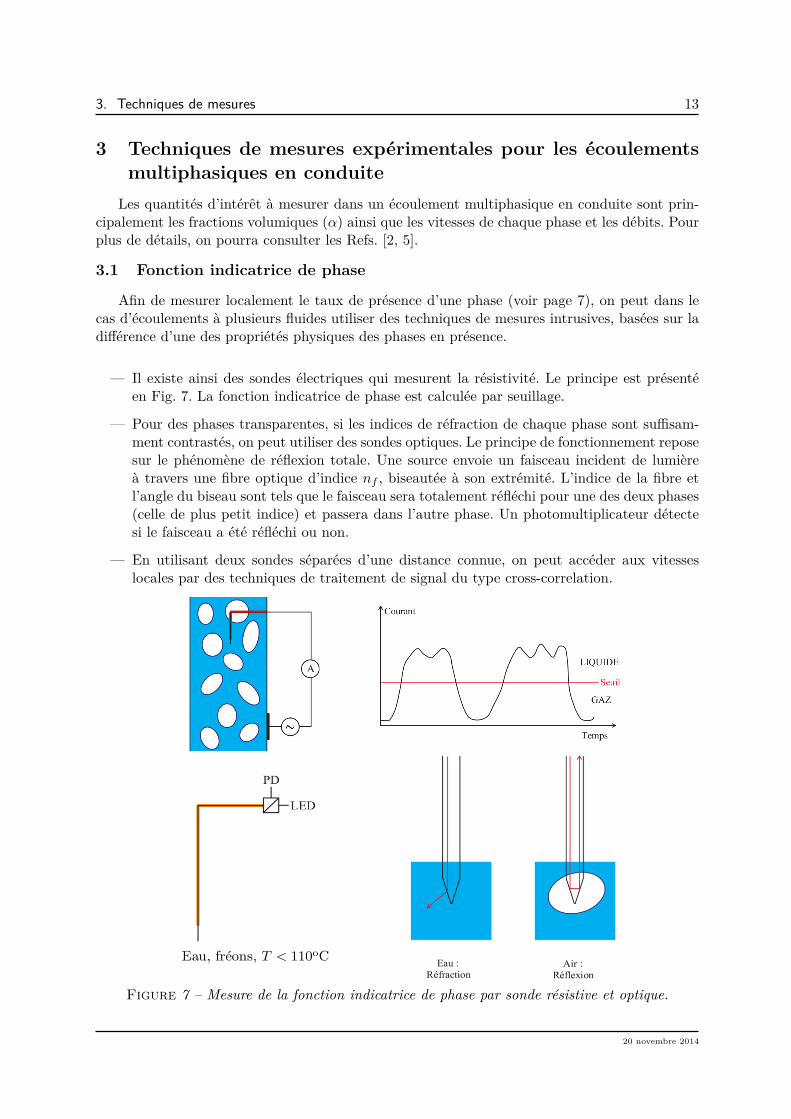
— Il existe ainsi des sondes électriques qui mesurent la résistivité. Le principe est présentéen Fig. 7. La fonction indicatrice de phase est calculée par seuillage.
— Pour des phases transparentes, si les indices de réfraction de chaque phase sont suffisam-ment contrastés, on peut utiliser des sondes optiques. Le principe de fonctionnement reposesur le phénomène de réflexion totale. Une source envoie un faisceau incident de lumièreà travers une fibre optique d’indice nf , biseautée à son extrémité. L’indice de la fibre etl’angle du biseau sont tels que le faisceau sera totalement réfléchi pour une des deux phases(celle de plus petit indice) et passera dans l’autre phase. Un photomultiplicateur détectesi le faisceau a été réfléchi ou non.
— En utilisant deux sondes séparées d’une distance connue, on peut accéder aux vitesseslocales par des techniques de traitement de signal du type cross-correlation.
Figure 7 – Mesure de la fonction indicatrice de phase par sonde résistive et optique.
20 novembre 2014
14 3. Techniques de mesures
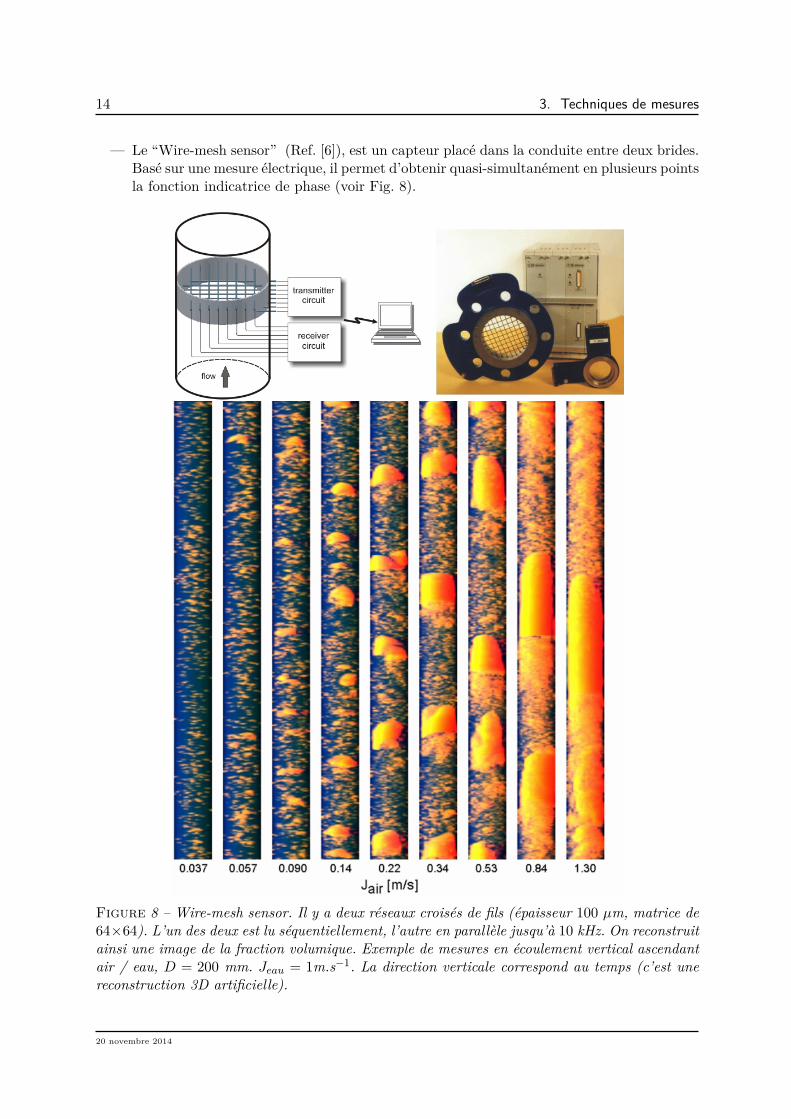
— Le “Wire-mesh sensor” (Ref. [6]), est un capteur placé dans la conduite entre deux brides.Basé sur une mesure électrique, il permet d’obtenir quasi-simultanément en plusieurs pointsla fonction indicatrice de phase (voir Fig. 8).
Figure 8 – Wire-mesh sensor. Il y a deux réseaux croisés de fils (épaisseur 100 µm, matrice de64×64). L’un des deux est lu séquentiellement, l’autre en parallèle jusqu’à 10 kHz. On reconstruitainsi une image de la fraction volumique. Exemple de mesures en écoulement vertical ascendantair / eau, D = 200 mm. Jeau = 1m.s−1. La direction verticale correspond au temps (c’est unereconstruction 3D artificielle).
20 novembre 2014

3. Techniques de mesures 15
3.2 Fraction volumique
La fraction volumique instantanée (αi(z, t)) est une mesure globale sur la section. Là aussi ilexiste différentes techniques de mesures, reposant sur le contraste d’une propriété physique desphases en présence.
Mesure de capacité.
Cette méthode consiste à fabriquer un condensateur, dont la capacité va dépendre de lapermittivité (constante diélectrique) effective du milieu situé entre les électrodes (voir Fig. 9).
Figure 9 – Principe de la mesure de fraction volumique instantannée par capacité.
La valeur de la constante diélectrique pour quelques corps est donnée dans le tableau 3.1.
Air Huile Eauεr 1 2 80
Table 3.1 – Permittivité relative.
Méthode par atténuation de rayons γ.
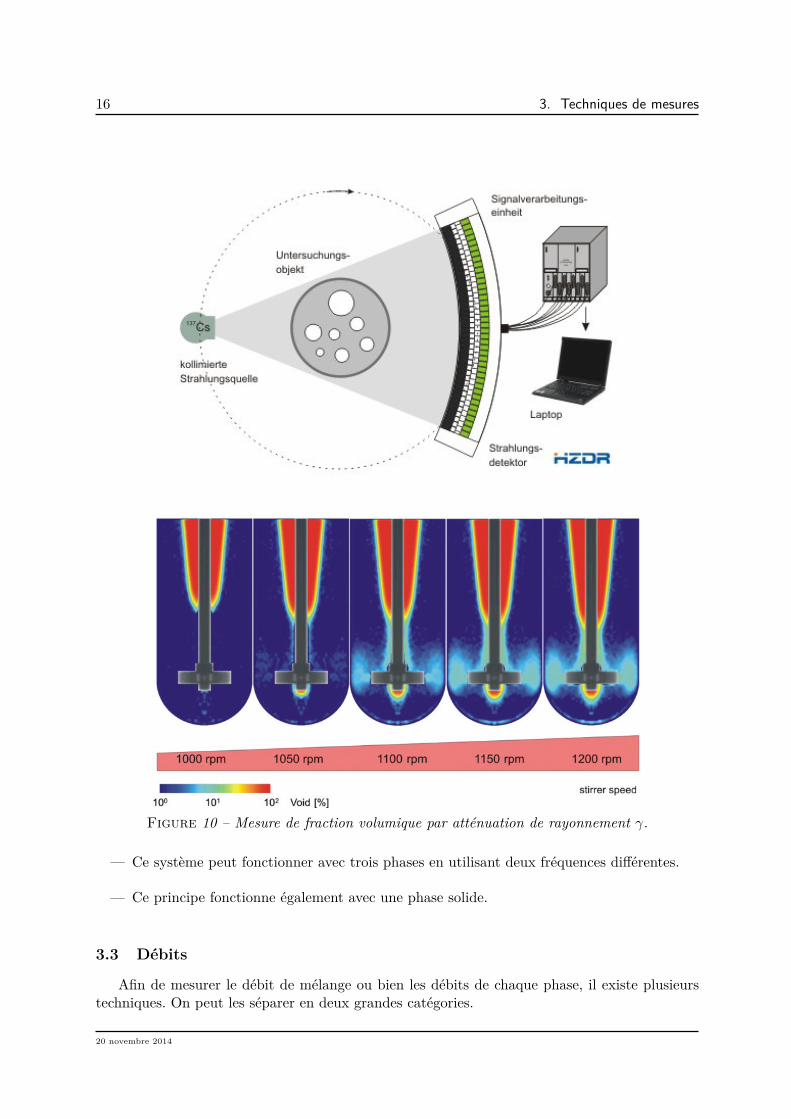
Il s’agit d’une méthode de mesure non-intrusive et ne nécessitant pas de démontage sur laconduite (voir Fig. 10). Le principe en est le suivant [7, 8] :
— Un rayonnement γ d’intensité I est atténué dans un milieu i selon la loi de Beer-Lambert :
dI = −µiIdx
— Le coefficient d’atténuation µi dépend de la fréquence f du rayonnement et de la densitédu milieu.
— Dans un tuyau de diamètre D contenant deux phases de coefficients d’atténuation diffé-rents, l’intensité Im recueillie sur le détecteur s’exprime de la manière suivante, avec I0(f)l’intensité incidente du faisceau :
Im(f) = I0(f) exp(−2∑i=1
αiµi(f)D)
— En notant I1 et I2 les intensités mesurées pour chaque phase présente toute seule dans laconduite (c’est-à-dire lorsque respectivement α1 = 1 et α2 = 1), et sachant que α1+α2 = 1,on a :
α1 = ln(I2)− ln(Im)ln(I2)− ln(I1)
20 novembre 2014
16 3. Techniques de mesures
Figure 10 – Mesure de fraction volumique par atténuation de rayonnement γ.
— Ce système peut fonctionner avec trois phases en utilisant deux fréquences différentes.
— Ce principe fonctionne également avec une phase solide.
3.3 Débits
Afin de mesurer le débit de mélange ou bien les débits de chaque phase, il existe plusieurstechniques. On peut les séparer en deux grandes catégories.
20 novembre 2014
3. Techniques de mesures 17
Les méthodes par séparation des phases
→ Dans ce cas, on doit placer sur la conduite un séparateur de phases et on dirigera les nphases vers n débimètres monophasiques « classique ». Cette méthode s’inscrit bien dansle cadre d’un procédé où on cherche à récupérer une phase précieuse (voir Fig. 1). Dans lecas contraire où on va remélanger les phases, l’inconvénient est de générer des pertes decharges importantes.
Les méthodes de mesures en ligne
→ Dans le cas de faibles fractions volumiques, les débimètres électromagnétiques peuventpermettre de mesurer la vitesse du mélange.
→ On peut utiliser des systèmes déprimogènes avec une calibration spéciale tenant comptede la fraction volumique, que l’on doit mesurer par ailleurs.
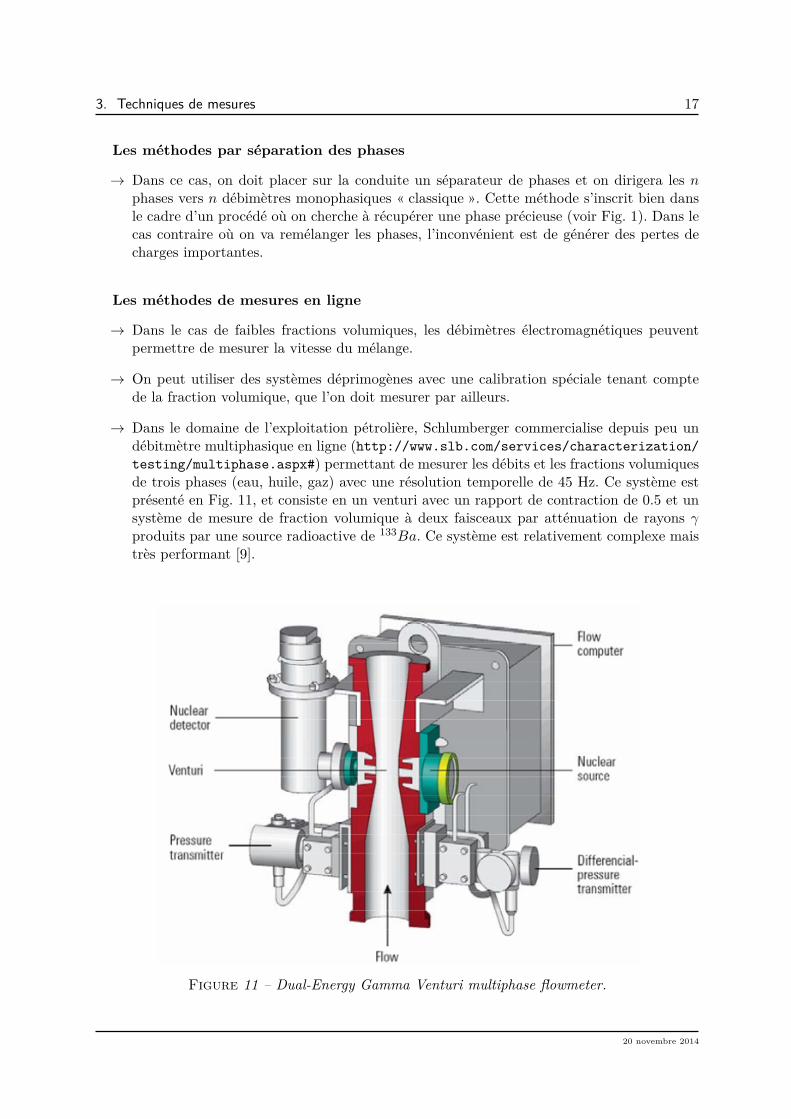
→ Dans le domaine de l’exploitation pétrolière, Schlumberger commercialise depuis peu undébitmètre multiphasique en ligne (http://www.slb.com/services/characterization/testing/multiphase.aspx#) permettant de mesurer les débits et les fractions volumiquesde trois phases (eau, huile, gaz) avec une résolution temporelle de 45 Hz. Ce système estprésenté en Fig. 11, et consiste en un venturi avec un rapport de contraction de 0.5 et unsystème de mesure de fraction volumique à deux faisceaux par atténuation de rayons γproduits par une source radioactive de 133Ba. Ce système est relativement complexe maistrès performant [9].
Figure 11 – Dual-Energy Gamma Venturi multiphase flowmeter.
20 novembre 2014
18 3. Techniques de mesures
Il y a encore de nombreux progrès technologiques à accomplir dans le domaine de la mesure dedébits en écoulements multiphasiques ! On pourra également consulter l’article de référence [10].
3.4 Vitesses
Tube de Pitot
On peut employer des tubes de Pitot en écoulement diphasique, plutôt dans le cas d’écou-lements dispersés liquide /liquide ou liquide /gaz. On a alors accès à la vitesse moyenne dumélange, si l’on connait par ailleurs la fraction volumique donc la masse volumique du mélange.Des facteurs correctifs sont à utiliser éventuellement.
Particle Image Velocimetry et méthodes dérivées
La PIV est une méthode standard de mesures de champs de vitesse (à 2D) en écoulementsmonophasiques. Le principe est le suivant : le fluide est ensemencé en petites particules quiagissent comme des traceurs. On illumine alors un plan au moyen d’une nappe laser. En prenantdeux images séparées par un temps très court (laser pulsé à double cavité), on remonte à lavitesse moyenne de paquets de particules dans des petites portions de l’image par des calculs decorrélation.
Si les particules sont suffisamment peu nombreuses et assez grosses pour avoir une imagerésolue des particules, on peut calculer la vitesse de chaque particule par PTV (Particle TrackingVelocimetry).
En écoulement multiphasique, à concentration raisonnable en phase dispersée, on peut en-semencer la phase continue avec des particules fluorescentes (rhodamine 6G ou B, fluoréscéine,vapeurs d’acétone par exemple), puis en utilisant un filtre de couleur, réaliser de la PIV sur laphase continue, et de la PTV sur la phase dispersée. Cette technique est possible avec une phasedispersée se déformant, en faisant appel à des techniques poussées de traitement d’image [11].
Phase Doppler Anemometry
La PDA est une technique basée sur l’utilisation d’un faisceau laser et sur la mesure parplusieurs photodétecteurs disposés judicieusement de la lumière réfléchie ou réfractée par desinclusions. Elle permet de mesurer à la fois la vitesse et la taille des particules.
20 novembre 2014
4. Configurations 19
4 ConfigurationsComme nous l’avons mentionné dans l’introduction, un écoulement multiphasique en conduite
peut présenter diverses organisations spatiales pour les phases (voir par exemple la Fig. 2 page 2).Ces structures d’écoulement sont appelées « régimes d’écoulement ». Ceux-ci sont définis visuel-lement, les transitions entre régimes sont de plus graduelles et la classification reste bien souventsubjective. Toutefois, on s’accorde à classer les régimes en trois grands groupes, selon l’homogé-néité en temps ou en espace de la répartition spatiale des phases. On distingue ainsi :
1. Régimes dispersés : homogènes en r et z, par exemple un écoulement à bulles en conduiteverticale (Fig. 12 à gauche) ;
2. Régimes séparés : non-homogènes en r, homogènes en z, par exemple un écoulementstratifié en conduite horizontale (Fig. 15 page 23) ;
3. Régimes intermittents : non homogènes en z et localement non stationnaires, parexemple le régime “slug flow” en conduite verticale (Fig. 12 au milieu).
Au premier ordre, la topologie de l’écoulement va dépendre des paramètres suivants :
— les conditions d’opération (pression, température, apport de chaleur) ;
— les propriétés physiques des phases (densités, viscosités, tension de surface,. . . ) ;
— les débits de chaque phase, qui jouent à la fois sur l’inertie et sur la concentration respectivede chaque phase ;
— la géométrie et l’orientation de la conduite.
Ainsi, de manière générale, on aura plutôt des écoulements dispersés si une des phases estpeu concentrée et que les forces d’inertie sont plus fortes que les effets de flottabilité (nombrede Froude élevé) ou que les effets de tension de surface (nombre de Weber élevé).
4.1 Ecoulements verticaux
Description des régimes
La figure 12 présente les principales configurations rencontrées en conduite verticale pour desécoulements co-courant ascendants d’eau et d’air. Dans le cas de l’écoulement de deux liquidesimmiscibles (eau / huile), on rencontre les mêmes régimes [12]. Dans le cas d’écoulements solides /liquide, en conduite verticale, on n’a en revanche pas de distinction entre divers régimes.→ Pour des fortes vitesses d’eau et de faibles vitesses d’air, on se trouve en présence d’écou-
lements dispersés à bulles (en anglais bubbly flow). Plus l’écoulement est turbulent et plus cesbulles vont se fragmenter. Dans le cas de l’air et de l’eau aux conditions usuelles, les bulles ontune forme sphérique si leur diamètre est inférieur au millimètre [13].→ Pour de plus faibles vitesses d’eau, on observe des écoulements intermittents. Tout
d’abord, on obtient un écoulement à poches (en anglais slug flow, c’est-à-dire « écoulement àlimaces »). Il s’agit d’un écoulement intermittent constitué de poches d’air allongées, avec unavant arrondi et un arrière plat (que l’on appelle « bulles de Taylor »), entrainant des bullesdans leur sillage. Le film liquide au niveau de la poche de gaz a un mouvement descendant.→ Lorsque la vitesse de l’eau reste faible et que la vitesse de l’air augmente, les poches d’air
vont se fractionner et l’écoulement va être de plus en plus désordonné. Il s’agit en fait d’un
20 novembre 2014
20 4. Configurations
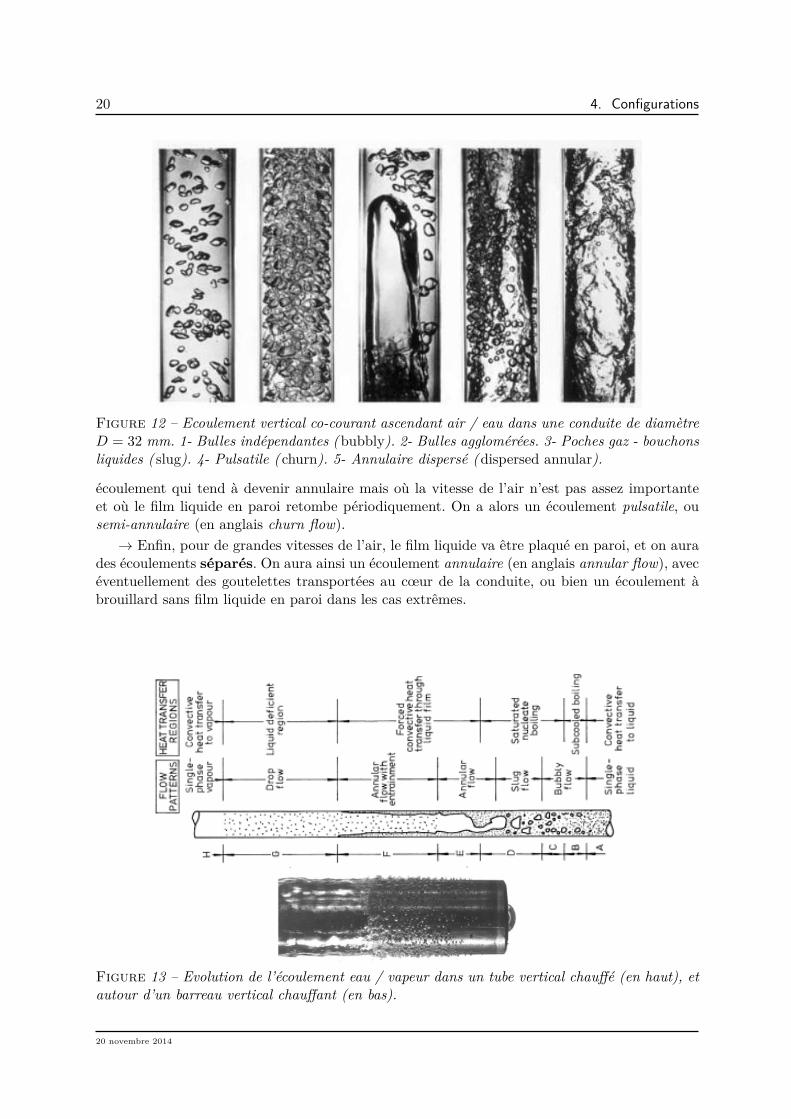
Figure 12 – Ecoulement vertical co-courant ascendant air / eau dans une conduite de diamètreD = 32 mm. 1- Bulles indépendantes (bubbly). 2- Bulles agglomérées. 3- Poches gaz - bouchonsliquides ( slug). 4- Pulsatile ( churn). 5- Annulaire dispersé (dispersed annular).
écoulement qui tend à devenir annulaire mais où la vitesse de l’air n’est pas assez importanteet où le film liquide en paroi retombe périodiquement. On a alors un écoulement pulsatile, ousemi-annulaire (en anglais churn flow).→ Enfin, pour de grandes vitesses de l’air, le film liquide va être plaqué en paroi, et on aura
des écoulements séparés. On aura ainsi un écoulement annulaire (en anglais annular flow), avecéventuellement des goutelettes transportées au cœur de la conduite, ou bien un écoulement àbrouillard sans film liquide en paroi dans les cas extrêmes.
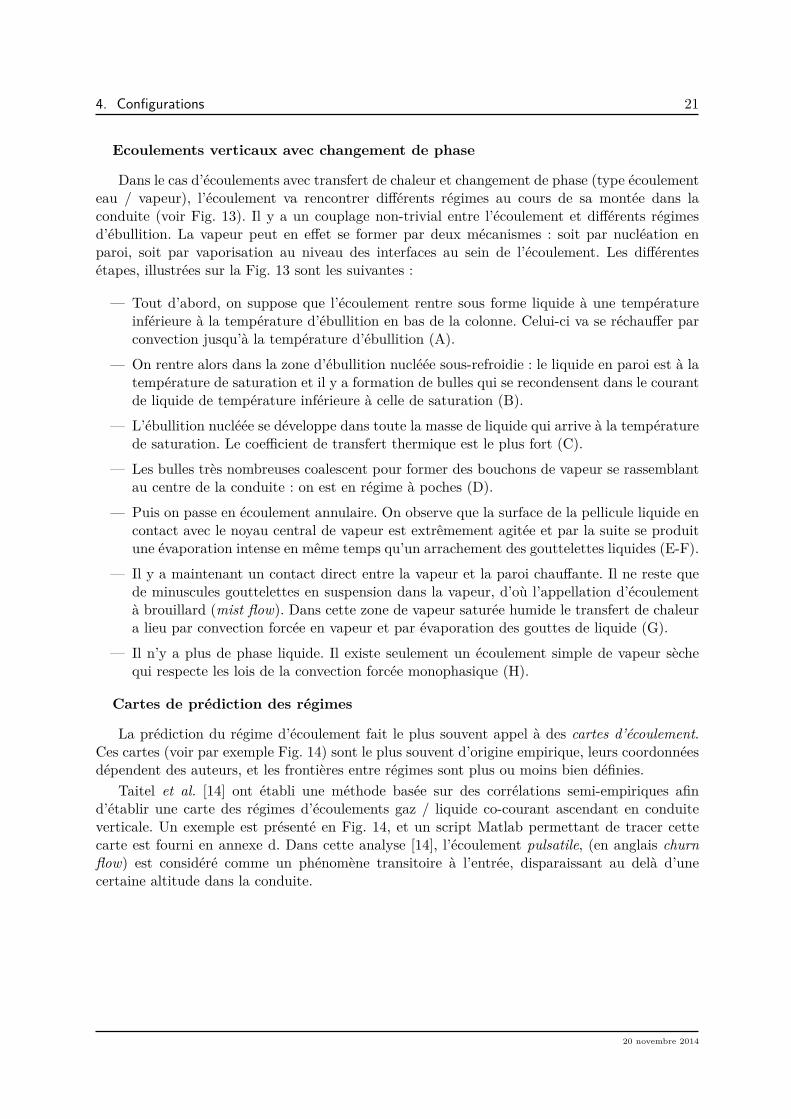
Figure 13 – Evolution de l’écoulement eau / vapeur dans un tube vertical chauffé (en haut), etautour d’un barreau vertical chauffant (en bas).
20 novembre 2014
4. Configurations 21
Ecoulements verticaux avec changement de phase
Dans le cas d’écoulements avec transfert de chaleur et changement de phase (type écoulementeau / vapeur), l’écoulement va rencontrer différents régimes au cours de sa montée dans laconduite (voir Fig. 13). Il y a un couplage non-trivial entre l’écoulement et différents régimesd’ébullition. La vapeur peut en effet se former par deux mécanismes : soit par nucléation enparoi, soit par vaporisation au niveau des interfaces au sein de l’écoulement. Les différentesétapes, illustrées sur la Fig. 13 sont les suivantes :
— Tout d’abord, on suppose que l’écoulement rentre sous forme liquide à une températureinférieure à la température d’ébullition en bas de la colonne. Celui-ci va se réchauffer parconvection jusqu’à la température d’ébullition (A).
— On rentre alors dans la zone d’ébullition nucléée sous-refroidie : le liquide en paroi est à latempérature de saturation et il y a formation de bulles qui se recondensent dans le courantde liquide de température inférieure à celle de saturation (B).
— L’ébullition nucléée se développe dans toute la masse de liquide qui arrive à la températurede saturation. Le coefficient de transfert thermique est le plus fort (C).
— Les bulles très nombreuses coalescent pour former des bouchons de vapeur se rassemblantau centre de la conduite : on est en régime à poches (D).
— Puis on passe en écoulement annulaire. On observe que la surface de la pellicule liquide encontact avec le noyau central de vapeur est extrêmement agitée et par la suite se produitune évaporation intense en même temps qu’un arrachement des gouttelettes liquides (E-F).
— Il y a maintenant un contact direct entre la vapeur et la paroi chauffante. Il ne reste quede minuscules gouttelettes en suspension dans la vapeur, d’où l’appellation d’écoulementà brouillard (mist flow). Dans cette zone de vapeur saturée humide le transfert de chaleura lieu par convection forcée en vapeur et par évaporation des gouttes de liquide (G).
— Il n’y a plus de phase liquide. Il existe seulement un écoulement simple de vapeur sèchequi respecte les lois de la convection forcée monophasique (H).
Cartes de prédiction des régimes
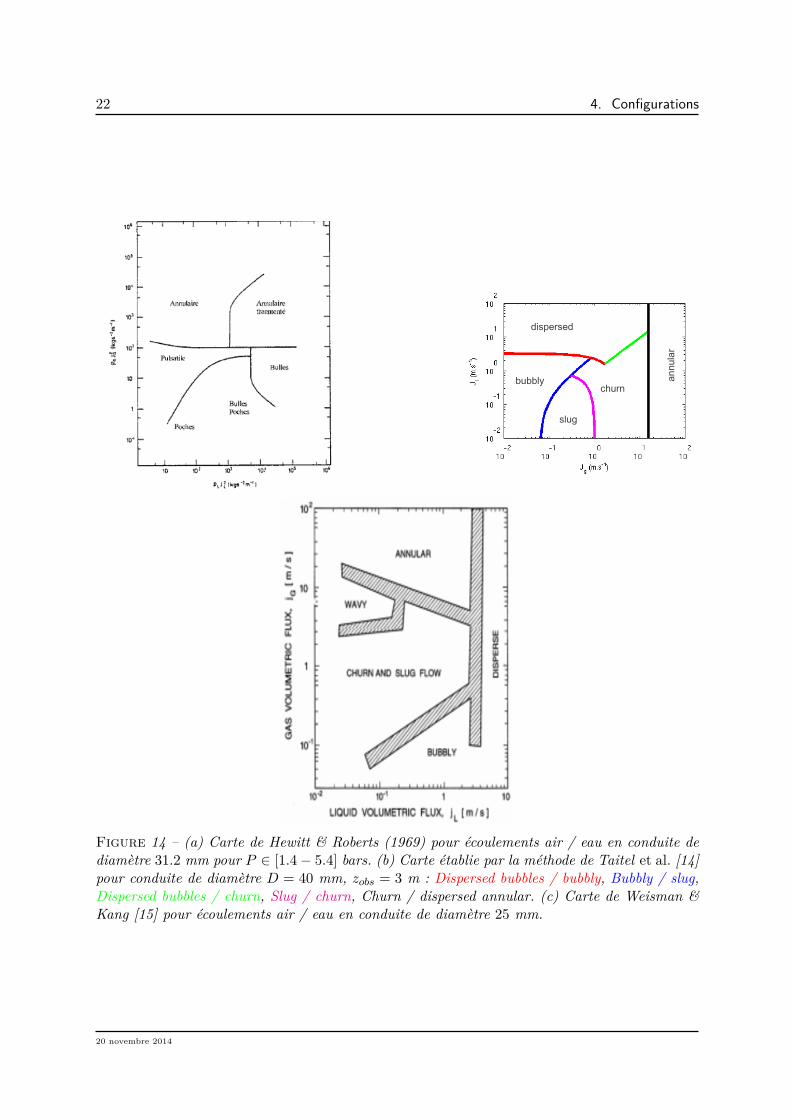
La prédiction du régime d’écoulement fait le plus souvent appel à des cartes d’écoulement.Ces cartes (voir par exemple Fig. 14) sont le plus souvent d’origine empirique, leurs coordonnéesdépendent des auteurs, et les frontières entre régimes sont plus ou moins bien définies.
Taitel et al. [14] ont établi une méthode basée sur des corrélations semi-empiriques afind’établir une carte des régimes d’écoulements gaz / liquide co-courant ascendant en conduiteverticale. Un exemple est présenté en Fig. 14, et un script Matlab permettant de tracer cettecarte est fourni en annexe d. Dans cette analyse [14], l’écoulement pulsatile, (en anglais churnflow) est considéré comme un phénomène transitoire à l’entrée, disparaissant au delà d’unecertaine altitude dans la conduite.
20 novembre 2014
22 4. Configurations
Figure 14 – (a) Carte de Hewitt & Roberts (1969) pour écoulements air / eau en conduite dediamètre 31.2 mm pour P ∈ [1.4− 5.4] bars. (b) Carte établie par la méthode de Taitel et al. [14]pour conduite de diamètre D = 40 mm, zobs = 3 m : Dispersed bubbles / bubbly, Bubbly / slug,Dispersed bubbles / churn, Slug / churn, Churn / dispersed annular. (c) Carte de Weisman &Kang [15] pour écoulements air / eau en conduite de diamètre 25 mm.
20 novembre 2014

4. Configurations 23
4.2 Ecoulements horizontaux
Description des régimes
En conduite horizontale, le nombre de configurations d’écoulement est plus élevé. En effet, lapesanteur, normale à l’axe de la conduite, va avoir tendance à créer une stratification si les phasesont des densités différentes. En outre, cet effet se fera sentir que ce soit pour des écoulementssolides / liquides, liquides / liquides ou gaz / liquides.
Figure 15 – A gauche : représentation schématique des régimes d’écoulement gaz /liquide enconduite horizontale. A droite, photographies d’un écoulement de billes de verre de diamètre5 mm dans une conduite horizontale de diamètre 100 mm, pour β = 5%, et, de haut en basJ = 1.2 (écoulement séparé à lit stationnaire), 2.1 (écoulement séparé à lit mouvant), et 4.9 m.s−1
(écoulement dispersé pseudo-homogène). En bas, photographies en écoulement air /eau.
La figure 15 présente ainsi, à gauche les configurations schématiques rencontrées en écoule-ment gaz / liquide en conduite horizontale, et à droite des photographies d’écoulements solides /liquide en conduite horizontale illustrant divers régimes. On remarque ainsi l’apparition des ré-
20 novembre 2014
24 4. Configurations
gimes séparés stratifiés lisses ou à vagues. Sur ce schéma on a une distinction que tous lesauteurs ne font pas pour les régimes intermittents entre écoulements à poches de gaz (plugflow) et à bouchons liquides (slug flow).
En écoulement horizontal d’air et d’eau, la situation est typiquement la suivante :→ Pour de très faibles vitesses d’eau et d’air, les écoulements sont laminaires et le régime
est séparé stratifié lisse.→ Partant de là, si la vitesses de l’air augmente, on obtient un régime séparé à vagues.→ Si la vitesse de l’air augmente encore, on obtient un régime dispersé annulaire.→ Pour des vitesses d’eau moyennes, on observe des régimes intermittents de type bouchons
liquides / slug ou poches de gaz / plug.→ Pour des vitesses d’eau importantes, on observe des régimes dispersés à bulles.
Ecoulements horizontaux transportant des solides
Dans le cas du transport de solides, pour des particules inférieures à 10 µm et pour des vi-tesses élevées, on observe des régimes d’écoulements dispersés homogènes. Pour de plus grandesparticules, et pour des vitesses plus faibles, les effets de sédimentation deviennent importantset d’autres régimes sont observés. Il y a dans la littérature une grande variété de termes et dedescriptions de régimes. Toutefois, la classification la plus commune est la suivante [16] :→ Régimes dispersés hétérogènes ou pseudo-homogènes avec un gradient vertical de concen-
tration (Fig. 15, photo en bas). Ces régimes sont rencontrés à moyenne vitesse.→ Lorsque la vitesse décroit, la concentration en particules dans le bas de la conduite atteint
la limite de compacité (on trouve souvent une valeur de 0.52 correspondant à un empilementaléatoire lâche). Il se forme alors un lit mouvant (Fig. 15, photo en haut à droite) et on a unrégime d’écoulement séparé à lit mouvant.→ Pour des vitesses encore plus faibles, on a formation d’un lit stationnaire en dessous d’un
lit mouvant (Fig. 15, photo en haut à gauche) : on a donc trois strates.
Ecoulements horizontaux avec changement de phase
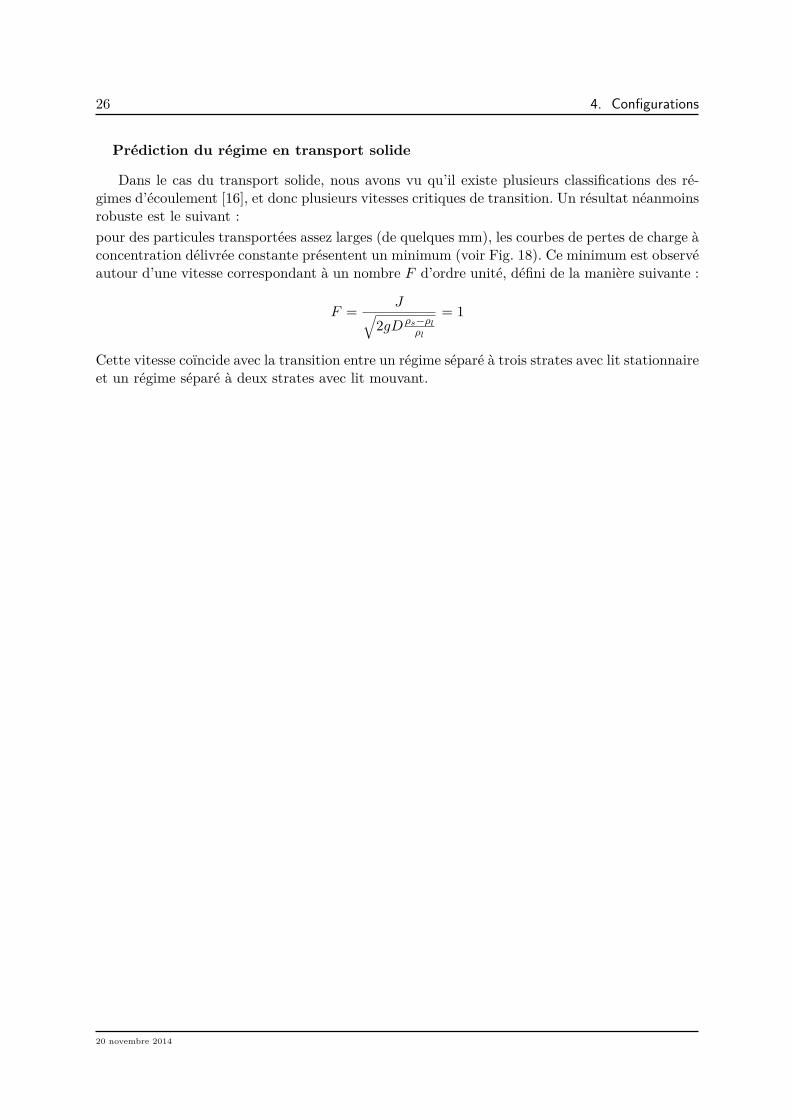
L’évolution des régimes d’écoulements dans un tube horizontal chauffé, avec changement dephase, est présentée en Fig. 16. Le scénario est identique au cas vertical (Fig. 13) à ceci prèsqu’on peut maintenant avoir un assèchement périodique précoce de la paroi supérieure du tube,qui va avoir de fortes conséquences sur les températures et les transferts en paroi.
Cartes de prédiction des régimes en écoulement liquide / gaz
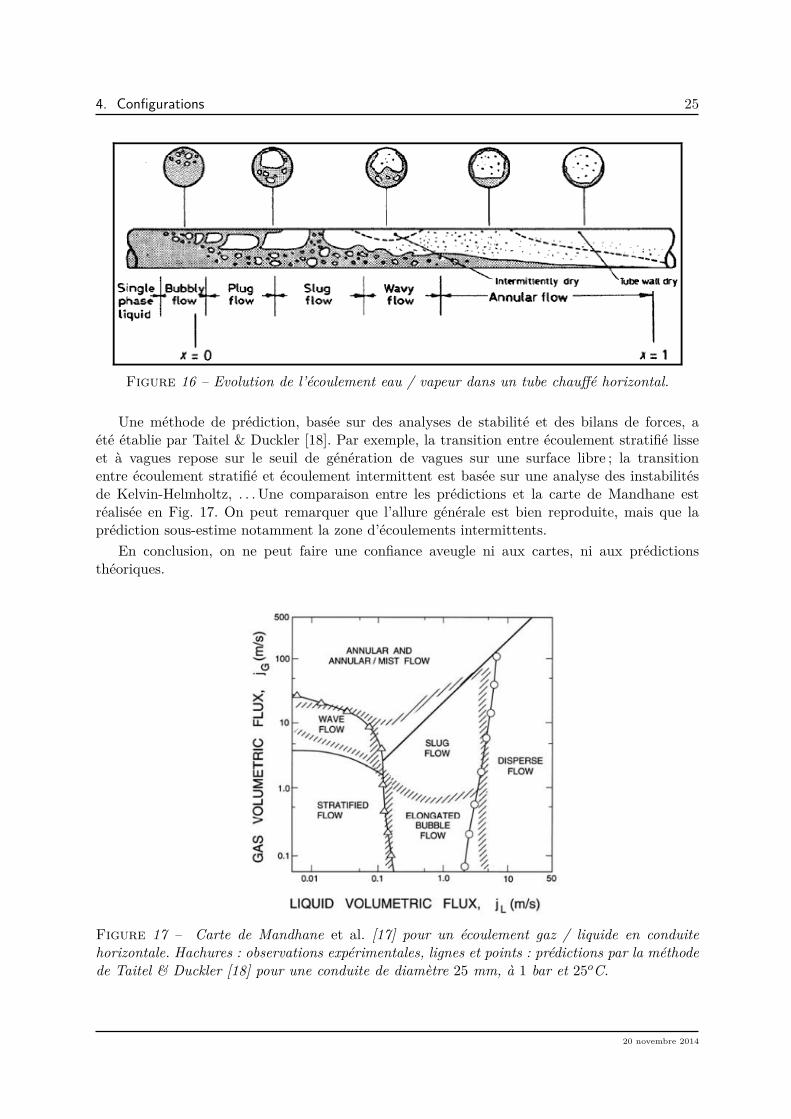
Pour les écoulements gaz / liquide en conduite horizontale, parmi les nombreuses cartesempiriques, nous présentons celle établie par Mandhane et al. [17] (voir Fig. 17). Cette cartecompile plus de 5900 observations. Son domaine de validité est le suivant :
— Diamètre D ∈ [13; 165] mm ;
— Masse volumique du liquide ρl ∈ [700; 1000] kg.m−3 ;
— Masse volumique du gaz ρg ∈ [0.8; 50] kg.m−3 ;
— Viscosité dynamique du liquide µl ∈[3× 10−4; 9× 10−2] Pa.s ;
— Viscosité dynamique du gaz µg ∈[1× 10−5; 2.2× 10−5] Pa.s ;
— Tension interfaciale σ ∈ [25; 100] mN.m−1 ;
20 novembre 2014
4. Configurations 25
Figure 16 – Evolution de l’écoulement eau / vapeur dans un tube chauffé horizontal.
Une méthode de prédiction, basée sur des analyses de stabilité et des bilans de forces, aété établie par Taitel & Duckler [18]. Par exemple, la transition entre écoulement stratifié lisseet à vagues repose sur le seuil de génération de vagues sur une surface libre ; la transitionentre écoulement stratifié et écoulement intermittent est basée sur une analyse des instabilitésde Kelvin-Helmholtz, . . . Une comparaison entre les prédictions et la carte de Mandhane estréalisée en Fig. 17. On peut remarquer que l’allure générale est bien reproduite, mais que laprédiction sous-estime notamment la zone d’écoulements intermittents.
En conclusion, on ne peut faire une confiance aveugle ni aux cartes, ni aux prédictionsthéoriques.
Figure 17 – Carte de Mandhane et al. [17] pour un écoulement gaz / liquide en conduitehorizontale. Hachures : observations expérimentales, lignes et points : prédictions par la méthodede Taitel & Duckler [18] pour une conduite de diamètre 25 mm, à 1 bar et 25oC.
20 novembre 2014
26 4. Configurations
Prédiction du régime en transport solide
Dans le cas du transport solide, nous avons vu qu’il existe plusieurs classifications des ré-gimes d’écoulement [16], et donc plusieurs vitesses critiques de transition. Un résultat néanmoinsrobuste est le suivant :pour des particules transportées assez larges (de quelques mm), les courbes de pertes de charge àconcentration délivrée constante présentent un minimum (voir Fig. 18). Ce minimum est observéautour d’une vitesse correspondant à un nombre F d’ordre unité, défini de la manière suivante :
F = J√2gD ρs−ρl
ρl
= 1
Cette vitesse coïncide avec la transition entre un régime séparé à trois strates avec lit stationnaireet un régime séparé à deux strates avec lit mouvant.
20 novembre 2014
5. Modélisation 27
5 ModélisationL’une des attentes les plus évidentes d’une étude d’un écoulement multiphasique en conduite
est la prédiction des pertes d’énergie qui se produisent lors de l’écoulement. Dans ce cours,il ne s’agit pas de donner un catalogue exhaustif de corrélations empiriques ou de méthodesparticulières, mais de mettre l’accent sur les mécanismes principaux générateurs de pertes decharge propres aux écoulements multiphasiques, puis d’introduire les principaux types de mo-dèles. Quelques exemples seront traités en exercice.
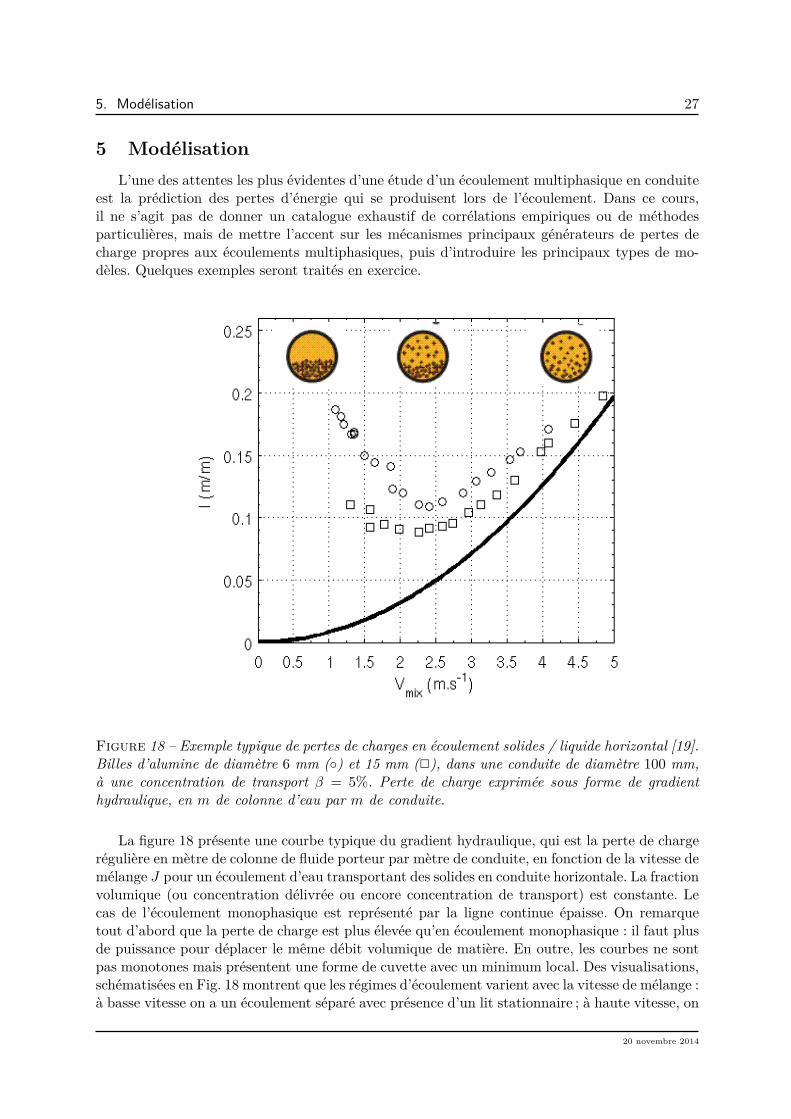
Figure 18 – Exemple typique de pertes de charges en écoulement solides / liquide horizontal [19].Billes d’alumine de diamètre 6 mm (◦) et 15 mm (2), dans une conduite de diamètre 100 mm,à une concentration de transport β = 5%. Perte de charge exprimée sous forme de gradienthydraulique, en m de colonne d’eau par m de conduite.
La figure 18 présente une courbe typique du gradient hydraulique, qui est la perte de chargerégulière en mètre de colonne de fluide porteur par mètre de conduite, en fonction de la vitesse demélange J pour un écoulement d’eau transportant des solides en conduite horizontale. La fractionvolumique (ou concentration délivrée ou encore concentration de transport) est constante. Lecas de l’écoulement monophasique est représenté par la ligne continue épaisse. On remarquetout d’abord que la perte de charge est plus élevée qu’en écoulement monophasique : il faut plusde puissance pour déplacer le même débit volumique de matière. En outre, les courbes ne sontpas monotones mais présentent une forme de cuvette avec un minimum local. Des visualisations,schématisées en Fig. 18 montrent que les régimes d’écoulement varient avec la vitesse de mélange :à basse vitesse on a un écoulement séparé avec présence d’un lit stationnaire ; à haute vitesse, on
20 novembre 2014
28 5. Modélisation
va tendre vers un écoulement dispersé pseudo-homogène. Le minimum de la courbe correspondà F ' 1 (voir page 26). On sent bien que ce type de courbe est délicat à modéliser, puisque lesmécanismes générateurs de perte sont multiples et que leur importance relative varie en fonctionde la vitesse.
Plusieurs pistes sont possibles, parmi lesquelles l’utilisation :
— de « corrélations » empiriques ;
— de modèles semi-empiriques, basés sur des bilans globaux (masse, quantité de mouvement,énergie) auxquels on adjoint des corrélations empiriques pour la fraction volumique et lespertes de charge ;
— d’outils de résolutions des équations locales1, type CFD (Computational Fluid Dynamics).
Il existe de très nombreuses corrélations empiriques souvent dédiées à une situation parti-culière. Quand à l’emploi de la CFD, il devient rapidement très coûteux en écoulement multi-phasique. Son utilisation industrielle est ainsi réservée à certains domaines, dans le cadre de laR&D. Un exemple d’utilisation de la méthode VOF (Volume Of Fluid) de capture d’interface,couplée à la résolution des équations de Navier-Stokes dans chaque phase sera abordé en TP.
L’utilisation de bilans globaux établis sur des portions de domaine est particulièrement adap-tée au cas des écoulements en conduite. On réduit ainsi fortement la complexité du problème,qui devient unidimensionnel ; on pose de plus le problème en terme de quantités intégrales quel’on sait mesurer expérimentalement : fractions volumiques, débits (voir § 3). L’établissementde tels bilans pour un cas simple monophasique est rappelé en § 5.1. En écoulements multipha-siques, on utilisera différents modèles basés sur deux grands type de bilans présentés en § 5.2,complétés par des modèles et corrélations pour la fraction volumique et les pertes de charges(§ 5.3 et § 5.4).
5.1 Rappels sur l’établissement de bilans intégrés sur la section de conduite
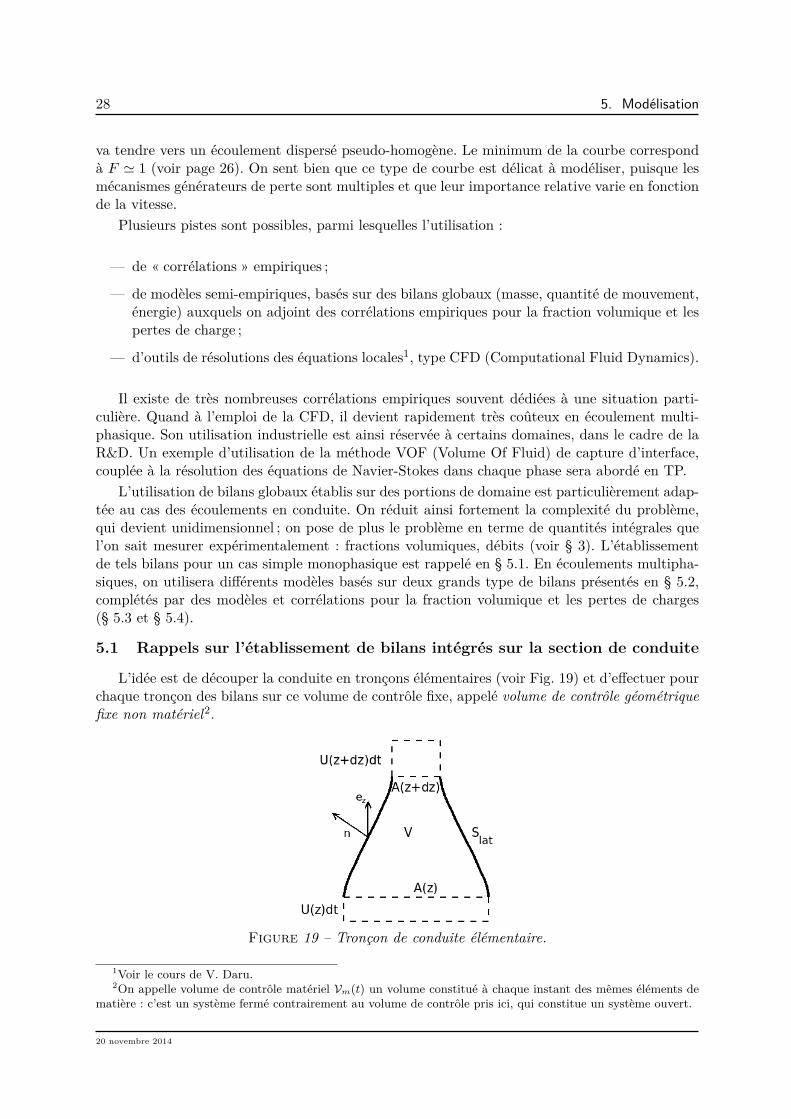
L’idée est de découper la conduite en tronçons élémentaires (voir Fig. 19) et d’effectuer pourchaque tronçon des bilans sur ce volume de contrôle fixe, appelé volume de contrôle géométriquefixe non matériel2.
Figure 19 – Tronçon de conduite élémentaire.
1Voir le cours de V. Daru.2On appelle volume de contrôle matériel Vm(t) un volume constitué à chaque instant des mêmes éléments de
matière : c’est un système fermé contrairement au volume de contrôle pris ici, qui constitue un système ouvert.
20 novembre 2014

5. Modélisation 29
Le tronçon de longueur dz délimite un volume V , avec une surface latérale Slat solide,et deux surfaces traversées par le fluide : l’entrée d’aire A(z), la sortie d’aire A(z + dz). Onutilisera des quantités moyennées sur la section de la conduite : ainsi, la vitesse du fluide U ,la masse volumique ρ, la pression p, la température T , etc, ne dépendent que de la coordonnéelongitudinale z.
On va considérer des volumes élémentaires dont on fera tendre l’extension dz vers 0, et onne gardera que le premier ordre en dz. On a alors pour toute fonction f(z) :∫
Vf(z′)dv = f(z)A(z)dz + o(dz2)
En particulier, V ' A(z)dz.On rappelle également le théorème de flux-divergence, appelé aussi théorème de Green-
Ostrogradski : ∫A(z)+Slat+A(z+dz)
~f · ~nds =∫V
div(f̃)
dv
En particulier, le vecteur ~ez étant de divergence nulle :
∫A(z)+Slat+A(z+dz)
~ez · ~nds = 0∫Slat
~ez · ~nds = − (A(z + dz)−A(z))
Bilan de masse
• En l’absence de source ou de puits de matière dans le volume géométrique fixe, la conser-vation de la masse s’exprime ainsi :
— « La variation de masse pendant le temps dt dans le volume V est égale à la masse qui estentrée moins celle qui est sortie ».
— La masse qui va rentrer pendant dt est contenue dans le volume A(z)U(z)dt (voir Fig. 19).
— De même, la masse qui va sortir pendant dt est celle contenue dans le volume A(z +dz)U(z + dz)dt.
— Au premier ordre en dz, cela se traduit ainsi :
∂
∂t(ρV ) dt = ρ(z)A(z)U(z)dt− ρ(z + dz)A(z + dz)U(z + dz)dt
∂
∂t(ρV ) = − ∂
∂z(ρAU) dz
A∂
∂t(ρ) + ∂
∂z(ρAU) = 0
Bilan de quantité de mouvement
• Le principe fondamental de la dynamique, c’est-à-dire la conservation de la quantité demouvement s’exprime ainsi dans le cas du volume de contrôle fixe non matériel :
20 novembre 2014

30 5. Modélisation
— « Le taux de variation de quantité de mouvement dans le volume V est égale à la sommedu flux de quantité de mouvement à travers sa frontière et de la résultante des forcesextérieures appliquées dans le volume et sur ses frontières ».
— En régime permanent, l’énnoncé peut être : « Le débit net de quantité de mouvementsortant du volume V est égal à la somme des forces agissant sur le volume V ».
— Il s’agit d’une équation vectorielle.— En projection selon l’axe de la conduite, on a :
∂
∂t(ρUV ) = [ρUAU ] (z)− [ρUAU ] (z + dz)
+∫V
~fV · ~ezdV +∫A(z)+Slat+A(z+dz)
(⇒σ · ~n) · ~ezds
Dans l’équation précédente, on identifie les différents termes (variation purement temporelledans le volume, flux de quantité de mouvement entrant, flux de quantité de mouvement sortant,forces de volume et forces de surfaces). La résultante des forces extérieures de volume se réduitsouvent à la gravité : ~fV · ~ez = ρgz
3. Quant au tenseur des contraintes ⇒σ , il peut se décomposer enune partie isotrope (pression p) et une partie s’identifiant aux contraintes visqueuses ⇒τ . Le bilans’écrit alors, en exprimant la force de friction sur la paroi comme le produit de la contrainte decisaillement pariétale τw par le périmètre mouillé P, et en ne gardant que les termes du premierordre en dz :
∂
∂t(ρU) + 1
A
∂
∂z
(ρAU2
)= ρgz −
∂
∂z(p)− P
Aτw
Bilan d’énergie
• Pour le volume de contrôle fixe non matériel, la conservation de l’énergie totale (sommede l’énergie cinétique et interne) s’exprime de la façon suivante.
« Le taux de variation de l’énergie totale dans le volume V est égale à la somme
— du flux d’énergie totale à travers sa frontière ;— du flux de chaleur entrant à travers la frontière et des sources éventuelles de chaleur dans
le volume ;— et des puissances des forces de volume agissant sur V et des forces de surface agissant sur
la frontière ».
En notant ~q le flux thermique surfacique et Q̇ les éventuelles sources en volume :
∂
∂t
∫V
(ρe+ 1
2ρv2)dV = −
∫A(z)+Slat+A(z+dz)
(ρe+ 1
2ρv2)~v · ~nds
−∫A(z)+Slat+A(z+dz)
~q · ~nds+∫VQ̇dV
+∫A(z)+Slat+A(z+dz)
(⇒σ · ~n
)· ~vds+
∫V
~fV · ~vdV
3Attention, avec cette convention, si l’axe de la conduite z est vers le haut, gz < 0 ; si l’axe z est horizontal,gz = 0.
20 novembre 2014

5. Modélisation 31
Sans sources en volume, en ne gardant que les premiers ordres en dz (on néglige les gradientsde contraintes visqueuses et de conduction) :
∂
∂t
(ρ
(e+ 1
2U2))
+ ∂
∂z
(ρ
(12U
2 + h− gzz)U
)= PAq
5.2 Bilans en écoulements multiphasiques
Equations de bilan moyennées sur la section de la conduite — version simplifiée,en conduite de section constante
Dans le cas d’un écoulement multiphasique, on fera des bilans dans un volume de contrôlefixe non matériel V =
∑i=1...N Vi(t), constitué des volumes occupés à chaque instant par chaque
phase. Ces volumes dépendent du temps, et sont séparés par des interfaces mobiles. Le trai-tement est ainsi plus complexe. On doit en particulier prendre en compte les conditions auxinterfaces. En appliquant alors les opérations de moyenne spatiale et temporelles, on aboutit àdes équations faisant intervenir des moyennes de produits (par exemple des termes enXi〈ρiwi〉z).Pour simplifier l’utilisation de ce type de bilans, en n’utilisant que des variables moyennées, ondoit exprimer les coefficients de corrélation :
Ca,b = 〈ab〉z〈a〉z〈b〉z
La version simplifiée des équations de bilans moyennées sur la section consiste à :
— Prendre des coefficients de corrélations tous égaux à 1 ;
— Considérer que la pression est uniforme sur la section de conduite ;
— Négliger les gradients longitudinaux des contraintes visqueuses et de la conduction ther-mique dans le bilan d’énergie ;
— Regrouper tous les effets non pris en compte dans un terme de contrainte pariétale moyenneτw.
Bilan de masse
— En conduite de section constante, le bilan de masse simplifié s’écrit :
∂
∂t
[ ∑i=1...N
αiρi
]+ ∂
∂z
[ ∑i=1...N
αiρiUi
]= 0
— En notant ρ la masse volumique du mélange, on montre que ρ =∑i=1...N αiρi ; en outre
on peut montrer que∑i=1...N αiρiUi = G. Le bilan de masse peut s’écrire :
∂
∂t[ρ] + ∂
∂z[G] = 0
— En régime permanent :G = cte
20 novembre 2014

32 5. Modélisation
Bilan de quantité de mouvement
— En conduite de section constante :∂
∂t
[ ∑i=1...N
αiρiUi
]+ ∂
∂z
[ ∑i=1...N
αiρiU2i
]=[ ∑i=1...N
αiρi
]gz −
∂
∂z[p]− P
Aτw
— Que l’on peut transformer en :
∂
∂t[G] + ∂
∂z[p] = − ∂
∂z
[G2 ∑
i=1...N
χ2i
αiρi
]+ ρgz −
PAτw
— En régime permanent :
d
dz[p] = −G2 d
dz
[ ∑i=1...N
χ2i
αiρi
]+ ρgz −
PAτw
On remarque que le gradient de pression (pertes de charges) se compose de trois termes :
– un terme d’accélération. Ce terme n’existe qu’en cas de variation le long de la conduitede la masse volumique du mélange, i.e. uniquement en cas de changement de phase,de transfert de masse entre les phases, ou de variation significative de la pression siune des phases est compressible ;
– un terme hydrostatique ;– un terme de friction à modéliser.
Bilan d’énergie
— En conduite de section constante :∂
∂t
[ ∑i=1...N
αiρi
(ei + 1
2U2i
)]+ ∂
∂z
[ ∑i=1...N
αiρi
(12U
2i + hi − gzz
)Ui
]= PAq
— En régime permanant :
Gd
dz
[ ∑i=1...N
χi
(12U
2i + hi − gzz
)]= PAq
Modèle homogène en écoulement diphasique
Dans le modèle global homogène, on remplace l’écoulement diphasique par un pseudo-fluidemonophasique dont les propriétés (vitesse, température masse volumique et viscosité) sont lesmoyennes du mélange obéissant aux lois d’un écoulement monophasique.
Ce modèle sera plutôt adapté dans le cas d’écoulements finement dispersés. L’hypothèsecentrale du modèle est en effet que les différentes phases ont la même vitesse et se mélangentbien. Ce sera par exemple le cas pour des mélanges liquide / vapeur près du point critique4
ou lorsque les débits massiques surfaciques sont importants5. L’hypothèse de non glissementimplique α = β.
En régime permanent, à l’équilibre thermodynamique, en conduite de section constante, leséquations de conservation s’écrivent pour un écoulement diphasique :
4Les propriétés du liquide et de sa vapeur sont proches.5Car dans ce cas on a plutôt des configurations d’écoulement bubbly ou misty.
20 novembre 2014

5. Modélisation 33
— Bilan de masse :G = Cte
— Bilan de quantité de mouvement :
dp
dz= −G2 d
dz
(1ρ
)+ ρgz −−
PAτw
— Bilan d’énergie, dans le cas d’un liquide avec changement de phase, en équilibre thermo-dynamique, en négligeant les variations d’énergie cinétique, d’énergie potentielle (χ : titre,Ll,v : chaleur latente) :
dχ
dz= 4qwGDhLl,v
Sous les hypothèses du modèle homogène à l’équilibre, le titre massique χ défini dans le cadrede ce cours sur les écoulements multiphasiques en conduite recoupe la notion de titre thermo-dynamique massique d’un mélange liquide / vapeur, souvent noté x.
5.3 Détermination de la fraction volumique
En regardant les différents termes de pertes de charge des modèles précédents, il appert queles pertes par accélération et d’origine hydrostatique peuvent être calculées directement pourpeut que l’on connaisse les fractions volumiques αi.
Or, cette dernière est un paramètre qu’adopte le système en fonction notamment du type derégime d’écoulement. On va donc chercher à exprimer les fractions volumiques αi en fonction despropriétés des phases, du débit massique total M et des titres massiques χi, ceux-ci étant soitdonnés par la thermodynamique (cas d’un changement de phase), soit un paramètre contrôlédans le process.
Nous ne traiterons dans la suite que le cas d’un écoulement diphasique 1 / 2.
Modèle homogène
Dans le cas du modèle homogène où le « rapport de glissement » (“Slip ratio”) S est parhypothèse S = 1, le résultat est immédiat (voir page 10) et donne la relation exacte sous leshypothèses du modèle homogène :
α1 = 11 +
((1−χ1)χ1
ρ1ρ2
)Cas général
Dans le cas d’un écoulement avec glissement entre phases significatif, il devient nécessaired’utiliser des modèles ou des corrélations empiriques pour la fraction volumique.
La plupart se base sur un modèle ou une corrélation du rapport de glissement (rapport desvitesses moyennes entre phases) :
S = U1U2
α = 11 + S
((1−χ1)χ1
ρ1ρ2
)20 novembre 2014
34 5. Modélisation
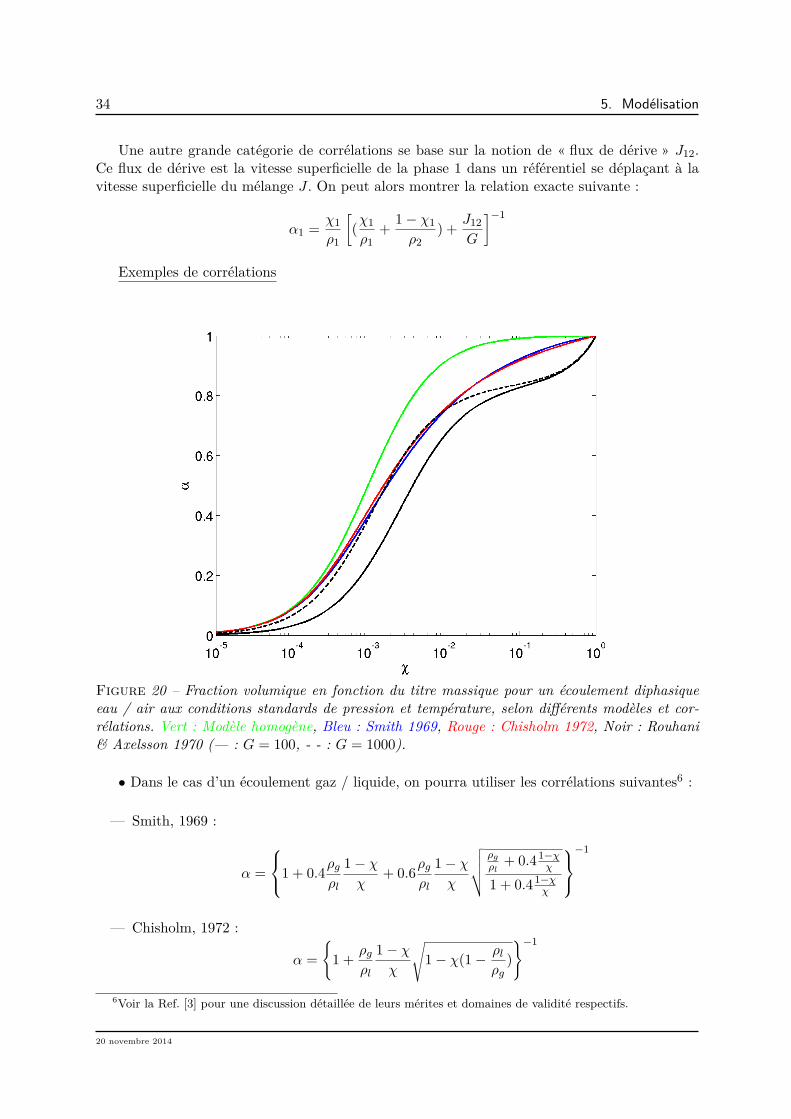
Une autre grande catégorie de corrélations se base sur la notion de « flux de dérive » J12.Ce flux de dérive est la vitesse superficielle de la phase 1 dans un référentiel se déplaçant à lavitesse superficielle du mélange J . On peut alors montrer la relation exacte suivante :
α1 = χ1ρ1
[(χ1ρ1
+ 1− χ1ρ2
) + J12G
]−1
Exemples de corrélations
Figure 20 – Fraction volumique en fonction du titre massique pour un écoulement diphasiqueeau / air aux conditions standards de pression et température, selon différents modèles et cor-rélations. Vert : Modèle homogène, Bleu : Smith 1969, Rouge : Chisholm 1972, Noir : Rouhani& Axelsson 1970 (— : G = 100, - - : G = 1000).
• Dans le cas d’un écoulement gaz / liquide, on pourra utiliser les corrélations suivantes6 :
— Smith, 1969 :
α =
1 + 0.4ρgρl
1− χχ
+ 0.6ρgρl
1− χχ
√√√√ ρgρl
+ 0.41−χχ
1 + 0.41−χχ
−1
— Chisholm, 1972 :
α ={
1 + ρgρl
1− χχ
√1− χ(1− ρl
ρg)}−1
6Voir la Ref. [3] pour une discussion détaillée de leurs mérites et domaines de validité respectifs.
20 novembre 2014

5. Modélisation 35
— Rouhani & Axelsson, 1970 :
Jgl = α1.18{gσρl − ρgρ2l
}1/4
avec g l’accélération de la gravité et σ la tension de surface.
On reconnaît dans les deux premières (Smith, 1969) & (Chisholm, 1972) une version modifiéede la relation tirée du modèle homogène, et dans la troisième (Rouhani & Axelsson, 1970) unecorrélation du flux de dérive. Une comparaison de ces différents modèles et corrélations estprésentée en Fig. 20 pour le cas de l’eau et de l’air aux conditions usuelles.
On peut remarquer que le modèle homogène a tendance à surestimer la fraction volumiquepour un titre donné, ce qui est effectivement observé dans les écoulements co-courants ascendantsd’air et d’eau pas trop dispersés où un glissement significatif existe entre la phase gazeuse pluslégère et la phase liquide. La conséquence est que αréel ≤ αhomogène.• Dans le cas du transport de solides, un exemple a déjà été traité (voir § 2.3). La situation
se complique dans la réalité : des effets collectifs se manifestent lorsque la concentration enparticules augmente (interaction des sillages), modifiant l’expression de la vitesse de glissemententre les particules et le fluide. Pour des particules solides, la vitesse terminale d’un ensemblede particules Vt,hindered est par exemple bien décrite par la corrélation de Richardson & Zaki(1954) [16] :
Vt,hindered = Vt (1− α)m
avec m = 4.45Re−0.1Vt
pour 1 6 ReVt 6 500 et m = 2.4 pour ReVt > 500, ReVt étant un nombrede Reynolds basé sur la vitesse terminale et le diamètre de la particule.
5.4 Friction
La perte de pression par friction en écoulement multiphasique dépend fortement des ré-gimes d’écoulement. Sa prédiction requiert donc une modélisation ou l’emploi de corrélationsempiriques. Le modèle de friction choisi se devra d’être cohérent avec la famille de bilan globalutilisée.
Friction en modèle homogène
L’idée du modèle homogène est de remplacer l’écoulement diphasique par un pseudo-fluidemonophasique. La modélisation la plus simple de la contrainte de cisaillement pariétal consistedonc à utiliser un coefficient de friction Cf pour le fluide de masse volumique ρ du mélange,s’écoulant à la vitesse de mélange J , ou au débit massique surfacique du mélange G :
τw = Cf12ρJ
2 = Cf12G2
ρ
On doit alors évaluer ce coefficient Cf .• Une première voie consiste à utiliser une corrélation pour Cf , faisant intervenir un nombre
de Reynolds pour le mélange, par exemple celle de Blasius7 pour une conduite lisse en écoulementturbulent :
Cf = 0.079Re−0.25h
7Ou encore celle de Colebrook 1√Cf
= −4 log10
(1.26
Re√Cf
+ ε3.7D
)en conduite rugueuse de rugosité relative
ε/D, ou la loi de Hagen-Poseuille Cf = 16Re−1 en écoulement laminaire,. . .
20 novembre 2014

36 5. Modélisation
Le nombre de Reynolds pour le mélange homogène est Reh = ρJD/µh avec µh la viscosité dumélange. Cette viscosité du mélange peut être modélisée de différentes manières. Une expressionexacte, malheureusement correcte uniquement pour des sphères dures diluées et réparties demanière homogène dans un fluide de viscosité dynamique µ, telles que l’écoulement autourd’elles est laminaire, a été dérivée par Einstein : µh = µ(1 + 2.5α). On utilise alors souvent desexpressions empiriques de type « moyennes pondérées », par exemple pour un mélange g / l avectitres et fractions volumiques mesurés relativement à la phase g, une moyenne pondérée par letitre massique :
µh = χµg + (1− χ)µlou une moyenne harmonique pondérée par le titre massique (corrélation de McAdams et al. [20]) :
1µh
= χ
µg+ 1− χ
µl
• Une deuxième voie consiste à considérer que le coefficient à prendre est celui de la phaseporteuse qu’on aurait si elle s’écoulait seule dans la conduite à la même vitesse superficielle. Onse propose de tester ce modèle sur un exemple.
Test du modèle homogène pour un cas de transport hydraulique de particules solides
Figure 21 – Ecoulement horizontal, D = 52 mm. Eau / sable, dp = 0.2 mm. (Lazarus andNeilson 1978). A gauche : Cf, ls(β) en fonction de Rel. A droite, test de la relation fournie parle modèle homogène (ligne continue), pour les points expérimentaux à Rel = 105 (◦).
La figure 21 (de gauche) présente l’évolution d’un coefficient de friction Cf, ls, évalué à partirde la masse volumique du liquide et de la vitesse superficielle de la phase liquide, en fonctiondu nombre de Reynolds Rel défini sur la phase liquide, à plusieurs valeurs du titre volumiqueβ. Les définitions utilisés dans cet article sont :
dp
dz= 2Cf, ls(β,Rel)
1DρlJ
2l
Rel = JlD
νlElles ne correspondent donc pas à la forme usuelle du modèle homogène. On veut faire apparaîtreun coefficient de friction dans le cadre du modèle homogène que l’on notera dans un premier
20 novembre 2014

5. Modélisation 37
temps Z, et essayer de l’identifier, pour ces données. Tout d’abord, il faut transformer la relationpour la mettre sous la forme :
dp
dz= 2Z 1
DρJ2
avec ρ = βρs + (1− β)ρl (densité du mélange homogène) et J = Jl/(1− β).On montre alors que l’on a la relation :
Cf, ls(β,Rel)Z
= ρJ2
ρlJ2l
= 1 + β(ρs − ρl)/ρl(1− β)2
On peut remarquer sur la figure 21 (droite) que cette relation reproduit bien les pointsexpérimentaux (pour Rel > 105, valeur pour laquelle l’écoulement est bien dispersé), pour peuque l’on choisisse Z = Cf, ls(β = 0, Rel), c’est-à-dire le coefficient de friction qu’on observe enliquide seul à la même vitesse débitante.
Autres modèles de friction pour écoulements dispersés
L’exemple précédent permet d’introduire la notion de « multiplicateur » pour la modélisationde la friction en écoulement diphasique. L’idée est de considérer le gradient de pression dû àla friction pour l’écoulement diphasique comme proportionnel au gradient de pression que l’onobtiendrait en monophasique pour une des phases, généralement la plus concentrée L. Il existedeux variantes principales :
— Soit on considère le gradient de pression en monophasique que l’on observerait avec undébit massique surfacique GL. Le coefficient de proportionnalité est alors noté Φ2
L :(dp
dz
)diph
(J, χ) = Φ2L(χ)×
(dp
dz
)L
(GL)
— Soit on considère le gradient de pression en monophasique que l’on observerait avec undébit massique surfacique G. Le coefficient de proportionnalité est alors noté Φ2
LO :(dp
dz
)diph
(G,χ) = Φ2LO(χ)×
(dp
dz
)L
(G)
On emploiera ensuite un modèle ou une corrélation pour ce terme multiplicateur. Le modèlele plus simple est de considérer que le coefficient de friction est identique en diphasique et enmonophasique. Dans ce cas, Φ2
LO a une expression très simple en fonction de la densité dumélange diphasique :
Φ2LO = ρL
ρ
Un modèle plus complexe consiste à considérer également une variation du coefficient defriction pour le mélange. Dans ce cas, Φ2
LO a pour expression, en fonction de la densité dumélange diphasique et des coefficients de friction :
Φ2LO = ρL
ρ
Cf, diphCf L
20 novembre 2014

38 5. Modélisation
Par exemple, avec le modèle homogène (“Slip ratio” S = 1) pour la densité du mélange, lacorrélation de Blasius pour le coefficient de friction, et la corrélation de MacAdams et al. [20]pour la viscosité du mélange, on obtient l’expression suivante :
Φ2LO =
[1 + χ
ρl − ρgρg
] [1 + χ
µl − µgµg
]−0.25
A titre d’exercice : quelle variante de multiplicateur a-t-on utilisé pour modéliser les données dela Fig. 21 ?
Friction en modèle séparé
Bien que le modèle homogène puisse donner de bons résultats lorsque le rapport de glissementest proche de 1 (hautes pressions en gaz / liquide ou grands débits massiques), il n’est en généralpas applicable dans la majorité des situations. On utilisera alors un multiplicateur de friction etune corrélation pour celui-ci.
Méthode de Lockhart & Martinelli
Lockhart & Martinelli [21] ont développé une corrélation pour Φ2L, en utilisant de l’air et de
l’eau, en écoulement adiabatique, à basse pression (P ∈ [1 − 3.6] bars), en tubes horizontauxlisses de diamètres D < 25 mm. Cette corrélation est également utilisée dans d’autres cas, etétendue à d’autres corps [22].
Dans la formulation originale, on utilise les notations suivantes, pour du gaz / liquide avectitres mesurés par rapport au gaz :
— Expérience no1 : en écoulement diphasique pour un débit massique M = Ml +Mg, mesuredu gradient de pression dp/dz(F ) ;
— Expérience no2 : gaz seul au même Mg, mesure de dp/dz(FG) ;— Expérience no3 : liquide seul au même Ml, mesure de dp/dz(FL).
On introduit alors le « paramètre de Lockart & Martinelli » :
X2 =dp/dz(FL)dp/dz(FG)
Ce paramètre est en fait égal au rapport des multiplicateurs de friction définis en page 37 :
X2 = Φ2G
Φ2L
Les données sont présentées sous forme graphique dans la Ref. [21]. Une corrélation pour lemultiplicateur de friction a été établie ensuite [23] :
Φ2L =
dp/dz(F )dp/dz(FL)
= 1 + C
X+ 1X2
La constante C dépend du régime d’écoulement (laminaire ou turbulent) de chacune des deuxexpériences monophasiques. Les valeurs communément admises sont rapportées au Tab. 5.1
Ce modèle est complété par une corrélation pour la fraction volumique afin d’exprimer lestermes de perte de pression hydrostatique et d’aaccélération de manière cohérente avec le termede frottement :
α = 1−(1 + CX +X2
)−1/2
20 novembre 2014

5. Modélisation 39
Liquide Gaz C
turbulent turbulent 20− 21laminaire turbulent 10− 12turbulent laminaire 8− 10laminaire laminaire 5
Table 5.1 – Constante C de la corrélation de Lockart & Martinelli en fonction du régimed’écoulement
Compléments à la corrélation de Lockhart & Martinelli
— Par définition, on a :
dp/dz(FL) = 2Cf, LG2(1− χ)2
ρLD
dp/dz(FG) = 2Cf,GG2(χ)2
ρGD
Donc, si on prend pour les coefficients de friction des lois du type Cf = aRe−n, avecReG = GχD/µG et ReL = G(1 − χ)D/µL (n = 0.25 pour la corrélation de Blasius), onpeut exprimer le paramètre X2 de Lockhart & Martinelli en fonction des viscosités etdensités des deux phases et du titre en G :
X2 =(µLµG
)n (1− χχ
)2−n (ρGρL
)
— Dans le cas de tuyaux rugueux, i.e. lorsque les coefficients de frottement ne dépendentplus du nombre de Reynolds (n = 0), Chisholm (1973) propose la forme suivante pour laconstante C, avec S le “slip ratio” :
C = 1S
√ρLρG
+ S
√ρGρL
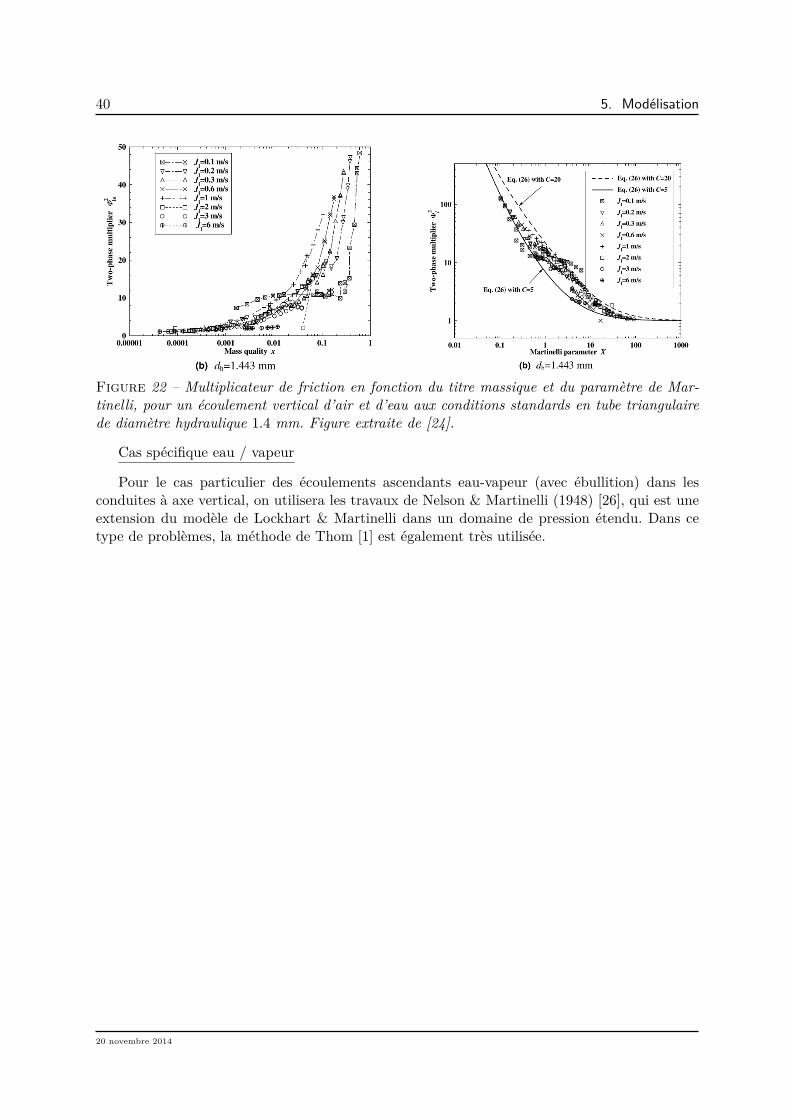
— On pourra trouver dans la littérature un ensemble d’autres corrélations pour le multipli-cateur de friction. Beaucoup d’entre elles sont dérivées de la corrélation de Lockhart &Martinelli ou utilisent le paramètre X2. Des exemples d’application peuvent être trouvésdans les Refs. [22] et [24] (voir également la Fig. 22).
Parmi les corrélations les plus utilisées, on peut citer :
– Baroczy (1966) [25], avec prise en compte explicite des effets du débit massique sur-facique ;
– Friedel (1979) [1], basée sur 250000 mesures, avec G ∈ [2 − 10330] kg.m−2s−1, pourdes tubes entre 1 et 154 mm, des pressions entre 1 et 64 bars, et des écoulementsair /eau, air /pétrole, méthane /eau et méthane / pétrole. Cette corrélation utiliseles nombres de Reynolds (viscosité), de Froude (ondes de gravité) et de Weber (tensionde surface).
Signalons enfin que ces corrélations ne sont bien souvent précises qu’à ±25% près.
20 novembre 2014
40 5. Modélisation
Figure 22 – Multiplicateur de friction en fonction du titre massique et du paramètre de Mar-tinelli, pour un écoulement vertical d’air et d’eau aux conditions standards en tube triangulairede diamètre hydraulique 1.4 mm. Figure extraite de [24].
Cas spécifique eau / vapeur
Pour le cas particulier des écoulements ascendants eau-vapeur (avec ébullition) dans lesconduites à axe vertical, on utilisera les travaux de Nelson & Martinelli (1948) [26], qui est uneextension du modèle de Lockhart & Martinelli dans un domaine de pression étendu. Dans cetype de problèmes, la méthode de Thom [1] est également très utilisée.
20 novembre 2014

A. Annexes 41
A Annexesa Lien entre fraction volumique, vitesses moyennes et titre massique
Pour un mélange de deux phases 1 et 2, dont on ne considère les titres que relativement à laphase 1, on a par définition :
χ = M1M1 +M2
= ρ1Q1ρ1Q1 + ρ2Q2
= 11 + ρ2
ρ1Q2Q1
= 11 + ρ2
ρ1U2U1
A2A1
Et : {α = A1
A1+A21− α = A2
A1+A2
D’où :χ = 1
1 + ρ2ρ1U2U1
(1−α)α
b Vitesse terminale d’une particule solide
Soit une particule de masse volumique ρs, de diamètre d, dans un fluide au repos de massevolumique ρl et de viscosité cinématique ν. L’accélération de la pesanteur est notée ~g. La massede la particule est m = πd3
6 ρs. On cherche la vitesse « terminale » V à laquelle la particule tombe(ou monte) dans le fluide en régime permanent.
Les forces agissant sur la particule sont :
— Son poids apparent : ~P = πd3
6 (ρs − ρl)~g ;
— La force de trainée : ~F , opposée au mouvement.
La force de trainée s’exprime par convention :
F = Cd(Red)πd2
412ρlV
2
Le coefficient de frottement Cd est une fonction du nombre de Reynolds basé sur le diamètre dela particule Red = V d
ν , qui en régime turbulent devient constant en bonne approximation (voirFig. 23).
En régime permanent, l’équilibre des deux forces donne :
V =√ρs − ρlρl
4gd3Cd(Red)
Il s’agit d’une formule implicite, Cd étant une fonction de V . Pour Red ∈[300 ; 105], on peut
le supposer constant, égal à 0.44 pour une sphère rigide.
20 novembre 2014

42 A. Annexes
Figure 23 – Coefficient de trainée d’une sphère et d’un disque en fonction du nombre de Rey-nolds.
Dans le cas d’une bulle, on peut trouver le même type de courbes pour le coefficient detrainée. Attention toutefois : dans les conditions usuelles, pour des diamètres supérieurs aumillimètre, une bulle d’air en ascension dans de l’eau ne reste pas sphérique. De plus, il y ades instabilités de sillage rendant la trajectoire de la bulle tridimensionnelle [13]. Le problèmedevient vite compliqué, surtout si l’on rajoute des effets collectifs,. . .
c Réponse au problème posé au § 2.3, p. 10
La différence des vitesses moyennes entre les deux phases vaut :
Vt = Ul − Us
Vt = Jl1− α −
Jsα
Vt = J
(1− β1− α −
β
α
)D’où :
β = α− α(1− α)VtJ
On souhaite exprimer α en fonction de β, Vt et J :
VtJα2 +
(1− Vt
J
)α− β = 0
C’est une équation du second degré en α, il y a deux racines, on ne garde que celle telle queα > 0 :
α =
(VtJ − 1
)+√
1 + VtJ
(VtJ − 2 + 4β
)2VtJ
20 novembre 2014
A. Annexes 43
d Code Matlab pour la méthode de Taitel en écoulement vertical
clear all;close all;
%% Parametres Physiquesrhol=1000;rhog=1;sigma=0.07;D=100e-3;g=9.81;nul=1e-6;zobs=75*D;
%% CarteJf=logspace(-2,2,1000);Jg=Jf;
%% LimitesDcrit=19*sqrt(sigma*(rhol-rhog)/(g*rhol^2));% a: limite pour bulles (si D>Dcrit)Jga=1/3*Jf+1.15/3*(sigma*g*(rhol-rhog)/rhol^2).^0.25;% b: limite pour bulles finement disperseesJfb=4*D^0.429*(sigma/rhol)^0.089/nul^0.072 ...*(g*(rhol-rhog)/rhol)^0.446-Jg;% c: limite pour les pochesJfc=0.92*Jg;% d: limite churn/slug basee sur altitude d’observationpourd=ones(size(Jg));for i=1:length(Jf)
Le=40.6*D.*((Jg+Jf(i))/sqrt(g*D)+0.22);pourd(i)=min(find(Le>=zobs,length(Le),’first’));
end% e: limite pour l’annulaireJge=3.1*(sigma*g*(rhol-rhog)/rhog^2)^0.25*ones(size(Jg));
%% Testspoura=find(Jga<=Jfb);pourb=find(Jfb>=Jfc);pourc=find(Jfb<=Jfc&Jg<=Jge);
zob=find(Jga<Jg(pourd)&Jge>Jg(pourd));Jgd=Jg(pourd(zob));Jfd=Jf(zob);if Jgd(end)>max(Jga(poura))
zob=find(Jge>Jg(pourd)&1/0.92*Jf<Jg(pourd));Jgd=Jg(pourd(zob));
20 novembre 2014
44 A. Annexes
Jfd=Jf(zob);end
%% Tracefigure;set(gcf,’PaperType’,’a4’);set(gcf,’PaperUnits’,’Centimeter’);set(gcf,’PaperPosition’,[2 2 8 6]);set(gca,’Position’,[0.25 0.25 0.65 0.65]);box on;hold on;set(gca,’FontSize’,6);plot(Jga(poura),Jf(poura),’LineWidth’,2);plot(Jg(pourb),Jfb(pourb),’r’,’LineWidth’,2);plot(Jg(pourc),Jfc(pourc),’g’,’LineWidth’,2);plot(Jgd,Jfd,’m’,’LineWidth’,2);plot(Jge,Jf,’k’,’LineWidth’,2);set(gca,’XScale’,’log’);set(gca,’YScale’,’log’);set(gca,’XLim’,[1e-2 1e2]);set(gca,’YLim’,[1e-2 1e2]);xlabel(’J_g (m.s^{-1})’);ylabel(’J_l (m.s^{-1})’);grid on;
20 novembre 2014
BIBLIOGRAPHIE 45
Bibliographie[1] Jean-Marc Delhaye. Thermohydraulique des réacteurs. EDP Sciences, 2008.
[2] R. Borghi and F. Anselmet. Modélisation des écoulements multiphasiques turbulents horsd’équilibre. Lavoisier, 2014.
[3] M. A. Woldesemayat and A. J. Ghajar. Comparison of void fraction correlations for differentflow patterns in horizontal and upward inclined pipes. International Journal of MultiphaseFlow, 33 :347–370, 2007.
[4] M. Planck. L’image du monde dans la physique moderne. Gonthier, 1963.
[5] G. Falcone, G. Hewitt, and C. Alimonti. Multiphase Flow Metering : Principles and Appli-cations. Elsevier, 2009.
[6] M. J Da Silva, E. Schleicher, and U. Hampel. Capacitance wire-mesh sensor for fast mea-surement of phase fraction distributions. Measurement Science and Technology, 18 :2245,2007.
[7] R. Thorn, G. A. Johansen, and E. Hammer. Recent developments in three-phase flowmeasurements. Measurement Science and Technology, 8 :691–701, 1997.
[8] R. Tschentscher, M. Schubert, A. Bieberle, T.A. Nijhuis, J. van der Schaaf, U. Hampel, andJ.C. Schouten. Tomography measurements of gas holdup in rotating foam reactors withnewtonian, non-newtonian and foaming liquids. Chemical Engineering Science, 66 :3317–3327, 2011.
[9] B. Theuveny, S. Rosmashkin, V. Shako, K. Rymarenko, V. Afanasyev, M. Nukhaev, andR. Sultangareev. Multiphase metering in siberian gas and condensate wells-lessons learnt inmultiphase well testing operations since 2006. In Proceedings of the International PetroleumTechnology Conference, Doha, Qatar, 7-9 December 2009, page IPTC 14068, 2009.
[10] G. Oddie and J. R. A. Pearson. Flow-rate measurement in two-phase flow. Annual Reviewof Fluid Mechanics, 36 :149–172, 2004.
[11] C. Stévenin. Étude de l’atomisation d’un jet d’eau haute vitesse Application à l’irrigationpar aspersion et à la pulvérisation. PhD thesis, 2012. https://tel.archives-ouvertes.fr/tel-00796791v2.
[12] A. C. Bannwart, O. M. H. Rodriguez, C. H. M. de Carvalho, I. S. Wang, and R. M. O.Vara. Flow patterns in heavy crude oil-water flow. Journal of Energy Resources Technology,126 :184–189, 2004.
[13] K. Ellingsen and F. Risso. On the rise of an ellipsoidal bubble in water : oscillatory pathsand liquid-induced velocity. Journal of Fluid Mechanics, 440 :235–268, 2001.
[14] Y. Taitel, D. Barnea, and A. E. Dukler. Modelling flow pattern transitions for steadyupward gas-liquid flow in vertical tubes. AIChE Journal, 26 :345–354, 1980.
[15] J. Weisman and S. Y. Kang. Flow pattern transitions in vertical and upwardly inclinedlines. International Journal of Multiphase Flow, 7 :271–291, 1981.
20 novembre 2014
46 BIBLIOGRAPHIE
[16] P. Doron, D. Granica, and D. Barnea. Slurry flow in horizontal pipes - experimental andmodeling. International Journal of Multiphase Flow, 13 :535–547, 1987.
[17] J. M. Mandhane, G. A. Gregory, and K. Aziz. A flow pattern map for gas—liquid flow inhorizontal pipes. International Journal of Multiphase Flow, 1 :537–553, 1974.
[18] Y. Taitel and A. E. Dukler. A model for predicting flow regime transitions in horizontaland near horizontal gas-liquid flow. AIChE Journal, 22 :47–55, 1976.
[19] F. Ravelet, F. Bakir, S. Khelladi, and R. Rey. Experimental study of hydraulic transport oflarge particles in horizontal pipes. Experimental Thermal and Fluid Science, 45 :187–197,2013.
[20] W. H. McAdams, W. K. Woods, and R. L. Bryan. Vaporization inside horizontal tubes –ii – benzene- oil mixtures. Trans. ASME, 64 :193, 1942.
[21] R. W. Lockhart and R. C. Martinelli. Proposed correlation of data for isothermal two-phase,two component flow in pipes. Chem. Engng. Prog., 45 :39, 1949.
[22] W. Zhang, T. Hibiki, and K. Mishima. Correlations of two-phase frictional pressure drop andvoid fraction in mini-channel. International Journal of Heat and Mass Transfer, 53(1–3) :453– 465, 2010.
[23] D. Chisholm. A theoretical basis for the lockhart-martinelli correlation for two-phase flow.Int. J. Heat Mass Transfer, 10 :1767–1778, 1967.
[24] T. S. Zhao and Q. C. Bi. Pressure drop characteristics of gas-liquid two-phase flow invertical miniature triangular channels. International Journal of Heat and Mass Transfer,44 :2523–2534, 2001.
[25] C. J. Baroczy. A systematic correlation for two-phase pressure drop. Chem. Eng. Prog.Symp. Series, 62 :232–249, 1966.
[26] R. C. Martinelli and D. B. Nelson. Prediction of pressure drop during forced circulationboiling of water. Trans. ASME, 70 :695–702, 1948.
20 novembre 2014