Embed Size (px)
DESCRIPTION
Jean-Benoit Jourdain Chercheur responsable: Frédéric Taillade. Imagerie polarimétrique pour l’aide à la conduite automobile. 18/06/08. Présentation du LCPC. Quatre grands secteurs d’activités :. Etudes géotechniques. Ouvrages d’art. Domaine urbain. Routes. Localisations. Paris - PowerPoint PPT Presentation
Citation preview

Imagerie polarimétrique Imagerie polarimétrique pour l’aide à la conduitepour l’aide à la conduite
automobileautomobile
Jean-Benoit JourdainJean-Benoit JourdainChercheur responsable: Chercheur responsable: Frédéric TailladeFrédéric Taillade
18/06/0818/06/08

PrésentationPrésentation du LCPC du LCPC
RoutesRoutes
Ouvrages d’artOuvrages d’artEtudes géotechniquesEtudes géotechniques
Domaine urbainDomaine urbain
Quatre grands secteurs d’activités :Quatre grands secteurs d’activités :

LocalisationsLocalisations
• ParisParis
• NantesNantes
• Marne-la-valléeMarne-la-vallée
• Satory VersaillesSatory Versailles

Présentation du projetPrésentation du projet
Recherche des constructeurs Recherche des constructeurs
automobiles :automobiles :
• Augmenter le confort de conduiteAugmenter le confort de conduite
• Assurer la sécurité de la voiture et de Assurer la sécurité de la voiture et de
ses occupantsses occupants Utilisation des capteurs de détectionsUtilisation des capteurs de détections
Étude de faisabilité :Étude de faisabilité :d’un détecteur de panneaux routiers.d’un détecteur de panneaux routiers.d’un détecteur d’eau sur la chaussée.d’un détecteur d’eau sur la chaussée.

Principe globalPrincipe global
Obtenir une image détectant la présence de Obtenir une image détectant la présence de panneaux routiers et d’eau sur la chaussée.panneaux routiers et d’eau sur la chaussée.
Utilisation de la polarisationUtilisation de la polarisation
Calcul du degrés de polarisation (D.O.P.) entre Calcul du degrés de polarisation (D.O.P.) entre deux imagesdeux images
Rotation d’un polaroïd devant une caméraRotation d’un polaroïd devant une caméra

Source de lumièreSource de lumièrepolariséepolarisée
Source de lumièreSource de lumièrepolariséepolarisée
Rétroréflexion Rétroréflexion sur le panneausur le panneauRétroréflexion Rétroréflexion sur le panneausur le panneau
Réflexion Réflexion sur l’eausur l’eau
Réflexion Réflexion sur l’eausur l’eau
Capture de 2 images au traversCapture de 2 images au traversd’un analyseur ( 0°/90°)d’un analyseur ( 0°/90°)
Capture de 2 images au traversCapture de 2 images au traversd’un analyseur ( 0°/90°)d’un analyseur ( 0°/90°)
Calcul du degré de polarisationCalcul du degré de polarisationCalcul du degré de polarisationCalcul du degré de polarisation
Source de lumièreSource de lumièrenon polariséenon polarisée
Source de lumièreSource de lumièrenon polariséenon polarisée
Diffusion sur Diffusion sur le panneaule panneau
Diffusion sur Diffusion sur le panneaule panneau
ImageImageImageImage
Système de reconnaissance de panneaux/ d’eauSystème de reconnaissance de panneaux/ d’eauSystème de reconnaissance de panneaux/ d’eauSystème de reconnaissance de panneaux/ d’eau
Information donner au conducteur et à la voitureInformation donner au conducteur et à la voitureInformation donner au conducteur et à la voitureInformation donner au conducteur et à la voiture

Principe de polarisationPrincipe de polarisation
La lumière diffusée par un panneau est légèrement La lumière diffusée par un panneau est légèrement polariséepolarisée
Présence d’un panneau : détection d’une lumière Présence d’un panneau : détection d’une lumière polariséepolarisée
La lumière réfléchie par de l’eau peut être polariséeLa lumière réfléchie par de l’eau peut être polarisée Présence d’eau sur la chaussée : détection d’une Présence d’eau sur la chaussée : détection d’une
lumière polariséelumière polarisée
Panneau :Panneau :
Eau :Eau :

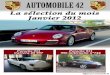
Réalisations : MontagesRéalisations : Montages
Montage réalisé pour la détection de panneaux :Montage réalisé pour la détection de panneaux :
SourceSource
PolariseurPolariseur
CaméraCaméra
AnalyseurAnalyseur

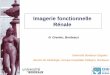
Montage réalisé pour la détection d’eau :Montage réalisé pour la détection d’eau :
SourceSource
CaméraCaméra
AnalyseurAnalyseur
Echantillon deEchantillon dechausséechaussée

Programme LabView : AcquisitionProgramme LabView : Acquisition
Capture de la scène pour un réglage en Capture de la scène pour un réglage en
temps réeltemps réel
Capture des deux images Capture des deux images
Conversion des images en tables de pixelsConversion des images en tables de pixels
Enregistrement de l’image D.O.P.Enregistrement de l’image D.O.P.

Programme LabView : TraitementProgramme LabView : Traitement
Calcul du degré de polarisation (D.O.P.) :Calcul du degré de polarisation (D.O.P.) :
Valeur du contraste entre 0 et 1.Valeur du contraste entre 0 et 1.

Problème rencontré dans les faibles valeurs de pixel.Problème rencontré dans les faibles valeurs de pixel.

Amélioration du contraste :Amélioration du contraste :• Fonction puissanceFonction puissance
Y = X Y = X nn

• Fonction SinusFonction Sinus
Y = (SIN( X.(Y = (SIN( X.(ππ/2) + n ))/2) + n ))22

Visualisation du traitementVisualisation du traitement effectué sur l’image D.O.P. :effectué sur l’image D.O.P. :

Changement d’échelle des valeurs de pixel :Changement d’échelle des valeurs de pixel :
Valeurs entreValeurs entre 0 et 10 et 1
Valeurs entreValeurs entre 0 et 2550 et 255
Y = (X – XY = (X – Xminmin) . 255 / (X) . 255 / (Xmaxmax – X – Xminmin))
Y = 255.XY = 255.X

Affichage de l’image finale :Affichage de l’image finale :
• Les valeurs des pixels sont arrondiesLes valeurs des pixels sont arrondies• Affichage de l’image résultante de la table de pixelAffichage de l’image résultante de la table de pixel
Image finale : sur 8 bits, XImage finale : sur 8 bits, Xminmin = 0, X = 0, Xmaxmax = 255 = 255

Partie traitement complète :Partie traitement complète :

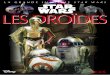
Résultats et interprétationsRésultats et interprétations
Détection de panneaux avec source polariséeDétection de panneaux avec source polarisée


Détection des panneaux sans source polarisée :Détection des panneaux sans source polarisée :


Détection de l’eau sur la chaussée :Détection de l’eau sur la chaussée :

AméliorationsAméliorations
Cellule PockelsCellule Pockels
Lame séparatriceLame séparatrice
Caméras en parallèlesCaméras en parallèles
But : capter deux imagesBut : capter deux imagessimultanémentsimultanément
Axes de recherches :Axes de recherches :

Formule du D.O.P. amélioréeFormule du D.O.P. améliorée
Problème : direction de polarisation inconnue du Problème : direction de polarisation inconnue du faisceau incidentfaisceau incident
0°
90°
0°
90°
II11
II22
II11=0=0
II22=I=Imaxmax
II11 = I = I22
D.O.P.= 1 D.O.P.= 0

D.O.P. maximal en fonction de l’angle de polarisationD.O.P. maximal en fonction de l’angle de polarisation de la lumière incidente :de la lumière incidente :

).(255
)²(
).(255
)² I- I (...
13545
13545
900
090
II
II
IIPOD
Nouvelle formuleNouvelle formule :
Acquisition de 4 images (0°, 45°, 90° et 135°)Acquisition de 4 images (0°, 45°, 90° et 135°)

Résultats de la nouvelle formule :Résultats de la nouvelle formule :

ConclusionConclusion
Bons résultats :Bons résultats : Détection de panneaux avec source polariséeDétection de panneaux avec source polarisée Détection d’eau sur la chausséeDétection d’eau sur la chaussée
Mauvais résultats :Mauvais résultats : Détection de panneaux sans source polariséeDétection de panneaux sans source polarisée
Etude de faisabilité utilisée par le LCPCEtude de faisabilité utilisée par le LCPC
Esprit d ’équipeEsprit d ’équipe Poursuite d’étude dans le domaine de la visionPoursuite d’étude dans le domaine de la vision