Embed Size (px)
Citation preview
Introduction à la relativité générale
Cours de relativité générale Didier Lauwaert. Copyright © 2013. I. Introduction II. L’espace-temps
II.1. La mesure de l’espace et du temps Mesures ; Espace-temps courbe ; Coordonnées
II.2. L’effet de la gravitation II.3. Espace courbe II.4. Espace-temps courbe II.5. Principe d’équivalence Principe d’équivalence faible ; Principe d’équivalence fort ; Conséquences ; Formulation moderne
II.6. Géodésiques III. Métrique Métrique de l’espace tangent ; Métrique de l’espace-temps courbe ; Les distances ; Points voisins ; Métrique ; Forme générale
IV. Dérivée covariante IV.1. Transport parallèle Comparaison de deux vecteurs ; Différentielle
IV.2. Connexion Symboles de Christoffel ; Relations entre les symboles ; Relations avec la métrique
IV.3. Dérivée covariante V. Equation des géodésiques VI. Tenseur de courbure
VI.1. Courbure Courbures intrinsèques et extrinsèques ; Rayon de courbure ; Excès sphérique
VI.2. Tenseur de courbure Transport parallèle sur un circuit fermé ; Dérivée seconde ; Symétries ; Autres tenseurs de courbure
VI.3. Forces de marée Déviation géodésique et forces de marée ; Equation de déviation des géodésiques
VII. Equation d’Einstein Limite newtonienne ; Equation d’Einstein
VIII. Solutions à symétrie sphérique VIII.1. Métrique statique à symétrie sphérique Intervalle ; Métrique ; Connexion ; Courbure
VIII.2. Métrique de Schwartzchild VIII.3. Déplacement du périhélie VIII.4. Déviation des rayons lumineux
IX. Les trous noirs IX.1. Formation des trous noirs IX.2. Géodésiques Géodésiques dans l’espace-temps de Schwartzchild ; Conséquences
IX.3. Horizon Nature de la singularité ; Horizon des événements
IX.4. Coordonnées Coordonnées de Novikov ; Coordonnées de Eddington-Finkelstein ; Coordonnées entrantes ; Coordonnées sortantes ; Coordonnées de Kruskal-Szekeres ; Diagramme de Kruskal-Szekeres
X. Les ondes gravitationnelles X.1. Champ gravitationnel faible X.2. Transformation des coordonnées X.3. Condition d’harmonicité X.4. Ondes gravitationnelles X.5. Tenseur de polarisation Ondes planes ; Détection
XI. La cosmologie
XI.1. Modèle standard Données observées ; Modèle dévolution ; Nucléosynthèse ; Formation des atomes ; Formations des étoiles
XI.2. Modèles en relativité générale XI.2.1. Métrique isotrope Forme standard ; Métrique ; Connexion ; Tenseur de Ricci
XI.2.2. Coordonnées comobiles Définition ; Particules initialement au repos ; Symétrie sphérique ; Métrique ; Connexion ; Tenseur de Ricci
XI.2.3. Métrique de Robertson-Walker Equation d’Einstein ; Métrique de Robertson-Walker
XI.2.4. Modèles d’univers Modèle elliptique ou sphérique ; Modèle euclidien ; Modèle hyperbolique
XI.2.5. Equations fondamentales XI.2.6. Décalage vers le rouge XI.2.7. Loi de Hubble
XI.3. Géométrie et topologie Visualiser l’univers ; Topologie
XII. Références
I. Introduction La relativité générale est la théorie relativiste de la gravitation. La relativité générale est avant toute chose une extension de la relativité restreinte à tous les référentiels accélérés. Mais elle relâche aussi la condition d’un espace euclidien et par l’usage du principe d’équivalence, elle devient aisément une théorie de la gravitation. Elle fascine par ses prédictions et ses applications relatives aux trous noirs et à la cosmologie. Mais c’est aussi une théorie extrêmement intéressante en soit puisque c’est la meilleure théorie de la gravitation dont nous disposons. Les efforts actuels portent sur les aspects expérimentaux mais aussi sur le mariage de la relativité générale avec les autres théories physiques, et en particulier la recherche d’une théorie quantique de la gravitation. Mais avant d’en arriver là, il faut d’abord connaitre la relativité générale classique. Les connaissances préalables sont :
La relativité restreinte. Les vecteurs et tenseurs (normalement bien connus avec la relativité restreinte). L’algèbre et l’analyse.
Une connaissance approfondie est indispensable. Ce cours ne sera pas exhaustif, et de loin. Il se veut une introduction générale au sujet. Nous essayerons d’en donner une présentation aisément abordable. Les mathématiques restent toutefois incontournable, quelle que soit l’approche, la relativité générale nécessite beaucoup d’efforts. Nous tenterons toutefois une approche la plus physique possible pour mieux « sentir » les différents éléments intervenant dans la théorie. Outre des références à des expériences réelles, nous utiliserons des expériences de pensée pour illustrer les raisonnements mais aussi une approche géométrique sans pour autant plonger dans les eaux profondes de la géométrie différentielle. Nous ferons toujours au plus simple. La difficulté des exercices sera indiquée par des étoiles.
- ✰. Facile.
- ✰✰. Normal.
- ✰✰✰. Difficile.
II. L’espace-temps
II.1. La mesure de l’espace et du temps
Mesures Physiquement, la mesure de l’espace et du temps utilise les mêmes instruments que dans le reste de la physique et la relativité restreinte. On utilise des étalons de longueur pour mesurer les distances et des horloges étalonnées pour mesurer le temps. La conception de ces instruments et leur usage respecte le principe de relativité, ici généralisé à tous les référentiels. Cela signifie en particulier que l’on veille à ce que dans un environnement donné, quel que soit le référentiel de l’instrument, sa conception, ses réglages et usages soient conformes à des standards bien précis (établis par les bureaux de métrologie). Ce qui donne une base sûre de comparaison des mesures. On sait que, tant que la gravité n’est pas trop élevée comme dans notre environnement et tant que l’on se limite à des distances faibles et des durées faibles, la relativité restreinte est parfaitement confirmée par l’expérience. On peut donc utiliser celle-ci dans tout voisinage « suffisamment petit » de tout point. En particulier, la vitesse de la lumière dans le vide est invariante et constante ce qui autorise son usage dans toutes les mesures. Dans un tel voisinage, les principes de la relativité restreinte s’appliquent et donc, en particulier, le concept d’événements ponctuels et de durée nulle, pour autant qu’on se limite à des mesures macroscopiques et que ce concept soit lui-même limité par la précision des mesures.
Espace-temps courbe Nous savons déjà par avance que nous allons rencontrer le concept d’espace-temps courbe. Dans cette situation, les notions de distances et de durées deviennent problématiques. Nous pouvons donc d’ores et déjà nous interroger sur les difficultés que cela implique. Imaginez un immense iceberg extrêmement découpé. Vous êtes dans une minuscule chaloupe au pied de l’iceberg et vous disposez d’un mètre ruban. Comment mesurer les dimensions de l’iceberg. Assurément cela est difficile. Non seulement l’iceberg est grand, très découpé, difficilement accessible mais en plus, la plus grande partie est immergée. Vous pouvez imaginer progressivement planter des pitons dans la glace et mesurer les distances entre eux. Avec suffisamment de patience, vous pouvez cartographier l’iceberg. La difficulté est semblable avec l’espace-temps. Mais il y a aussi deux difficultés supplémentaires. Le temps s’écoule de manière inexorable et ne laisse pas nécessairement le temps de tout analyser dans un espace-temps en perpétuel changement. En plus, il est assez difficile de planter des pitons dans quelque chose d’aussi immatériel que l’espace-temps ! Quelque chose peut-il nous aider ? Est-ce qu’il existe l’équivalent de ces pitons ? La réponse est oui : ce sont tous les événements qui se produisent dans l’espace-temps.
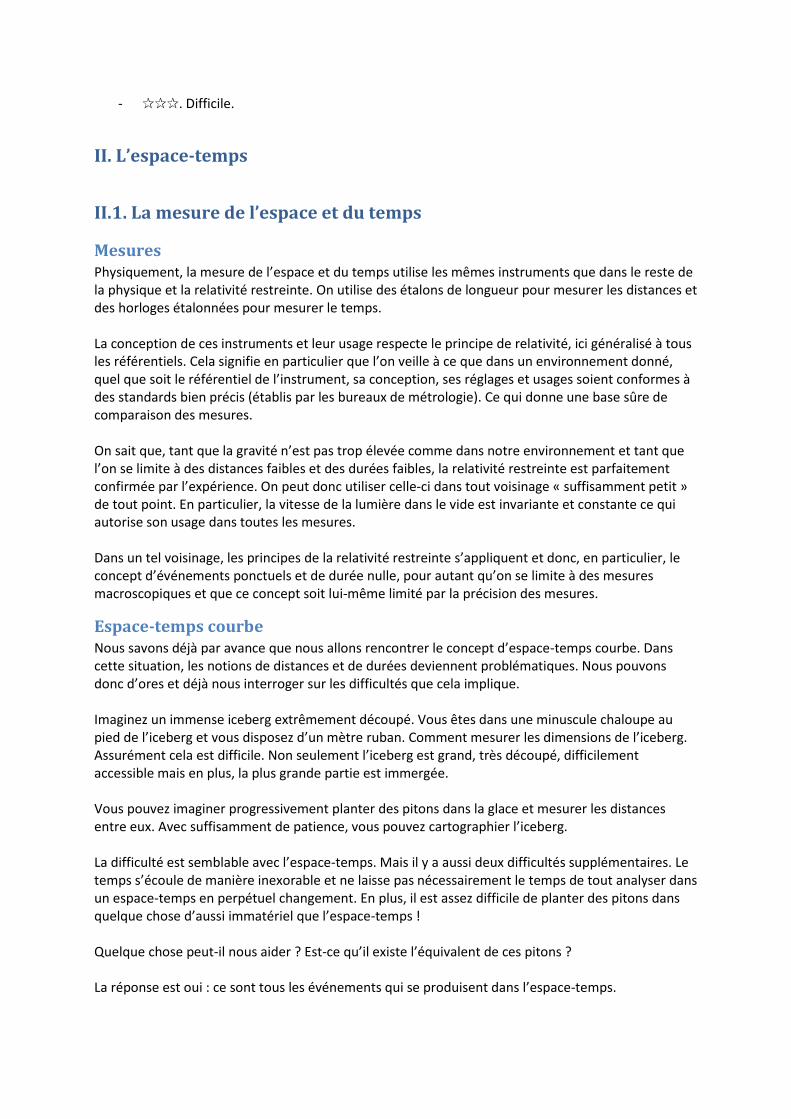
On peut identifier et mesurer tout ce que l’on désire à l’aide des événements qui se produisent dans l’espace-temps. De toute façon, ceux-ci couvrent par définition tout ce qui s’y passe. On peut donc dire que l’espace-temps est défini par ce qui s’y passe. On peut ainsi mesurer les événements 4 et 5, par diverses déductions en déduire les événements 1, 2, 3, etc. On peut ainsi tracer un réseau d’événements, avec leurs mesures ou tout au moins de manière abstraite, pour décrire l’espace-temps, réseau contenant les événements et leurs relations. On peut donc ainsi décrire l’espace-temps de manière relationnelle et en affectant des grandeurs aux événements et leurs relations aboutir à une description géométrique de l’ensemble.
Coordonnées Comment affecter des coordonnées aux événements ? On pourrait par exemple arpenter des chemins menant depuis un point de référence jusqu’à divers événements, avec des étalons ou des rayons lumineux, et se servir des valeurs mesurées pour attribuer des coordonnées en fonction des distances et des durées. Il y a toutefois à parier que, dans un espace-temps courbe, les valeurs ainsi trouvées dépendent du chemin utilisé. Tout comme deux chemins en montagne peuvent avoir des longueurs différentes selon les pics et vallées rencontrés et ce même si la distance est identique à vol d’oiseau. Mais ce n’est pas grave. Après tout, les coordonnées sont essentiellement des étiquettes attachées aux événements. Et sur ces étiquettes on peut écrire tout ce que l’on désire. L’important est d’avoir des règles précises permettant d’affecter ces coordonnées. Cela offre une grande liberté, la seule difficulté qui reste est alors de faire le lien entre ces coordonnées et d’éventuelles mesures. Cela peut se faire à travers ces règles.
II.2. L’effet de la gravitation Considérons le dispositif suivant.

Une paire électron – positron est au repos à la hauteur H. Chacune des particules a une masse m. L’énergie des particules est donc . Les particules chutent alors librement sous l’effet de la gravité. Lorsqu’elles atteignent le niveau du sol, elles sont animées d’une certaine vitesse et leur énergie totale est donc augmentée de l’énergie cinétique. Pour des hauteurs modérées, l’expérience nous apprend que l’énergie potentielle de gravitation donnée par (où g est l’accélération de la pesanteur) est convertie en énergie cinétique. Les deux particules ont donc chacune une énergie : Arrivées au sol, ces particules s’annihilent en donnant deux photons. Chaque photon a la même énergie E que ci-dessus. Le dispositif est conçu pour que les deux photons soient envoyés vers le haut. Ceux-ci grimpent alors le puits de potentiel et arrivent à l’altitude h avec une énergie . Un autre dispositif en altitude utilise alors les deux photons pour reformer un électron et un positron au repos. La conservation de l’énergie implique que :
La mécanique quantique nous enseigne que la fréquence des photons est reliée à leur énergie par la relation : Où h est la constante de Planck. Si l’on note et la fréquence des photons respectivement au sol et en altitude, on a alors : En grimpant le puits de potentiel, les photons subissent ainsi un décalage vers le rouge z donné par
Cela signifie que tout rayonnement quittant la surface d’un corps massif subit un décalage vers le rouge en s’éloignant du corps. Cet effet est déjà mesurable à la surface de la Terre. Il est aussi aisément observable en mesurant avec précision les raies spectroscopiques émises par les étoiles. Il reste toutefois généralement faible et ne doit être pris en compte que pour des dispositifs de haute précision comme le GPS. Par exemple, pour une hauteur de 1000 mètre sur Terre, on a :
Exercices
1. ✰ Calculez le décalage vers le rouge sur la Lune pour une hauteur de 100 m. Calculez le décalage vers le rouge d’une raie émise à la surface du Soleil et reçue sur Terre.
II.3. Espace courbe Considérons deux observateurs situés à deux altitudes respectives et avec :
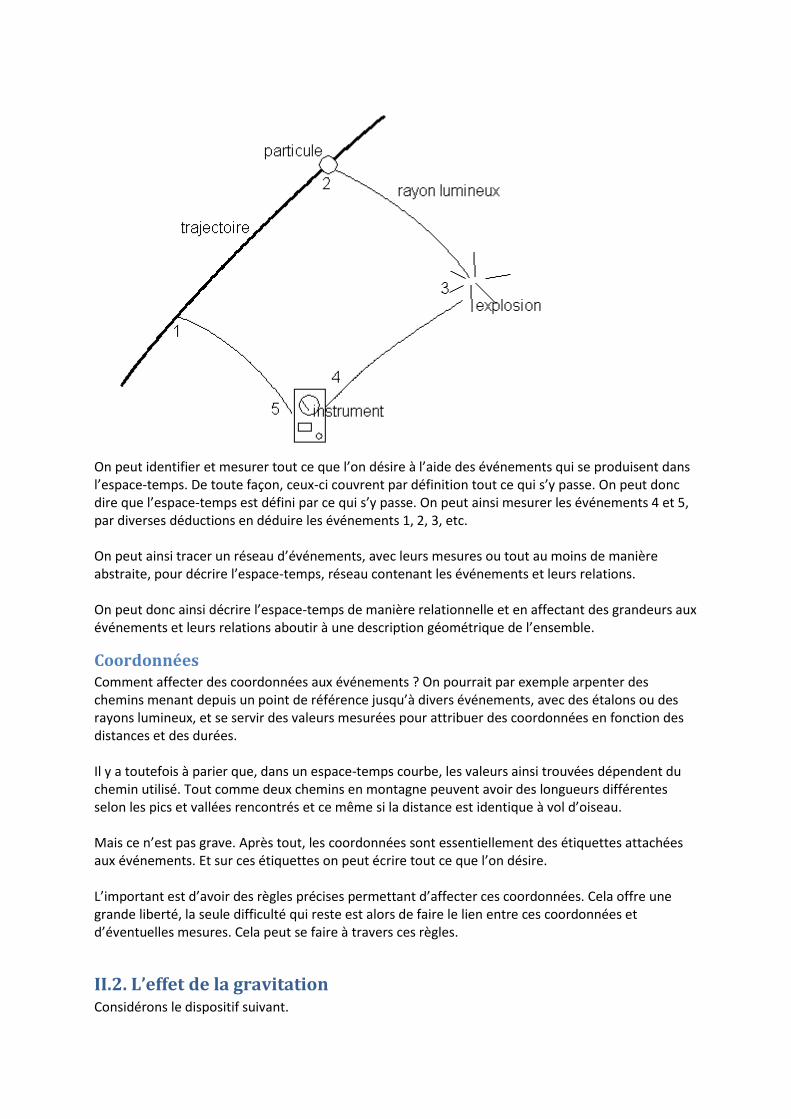
Ces deux observateurs sont immobiles avec des altitudes constantes ce qu’ils peuvent vérifier à tout instant en comparant leur position à un ensemble de règles étalons disposés verticalement ou par l’usage d’instruments tel que des radars. De même, la constance de la gravité peut être vérifiée avec des instruments tel que des dynamomètres pour mesurer le poids de masses étalons ou d’accéléromètres pour vérifier que l’accélération de la pesanteur reste constante. Le premier observateur envoie des impulsions à fréquence composées de N cycles. La durée de l’impulsion est donc : Le deuxième observateur reçoit l’impulsion et peut lui aussi compter le nombre N de cycles. Mais le décalage vers le rouge que subit le signal lui donne une fréquence . Par conséquent la durée de l’impulsion pour le deuxième observateur sera Cette dilatation du temps peut être constatée en comparant la durée à des horloges locales. A contrario, les horloges peuvent utiliser la fréquence comme pilote d’une horloge atomique, la comparaison locale de avec la durée de l’impulsion permet de constater cette dilatation du temps. Ce raisonnement est valable étant donné que chaque référentiel est considéré comme équivalent du point de vue de la description des lois physiques mais est aussi cohérent avec la mesure expérimentale directe. Effectuons un tracé des différents événements et lignes d’univers dans un diagramme de Minkowski.
Les lignes d’univers des deux observateurs sont horizontales puisque leur altitude est constante. Les trajectoires des fronts d’onde des impulsions, 1 et 2, ne sont pas connues a priori. En l’absence de gravité, ce serait des lignes obliques à 45°. Mais en présence de gravité nous ne pouvons pas le supposer sans vérification. Tout ce que nous pouvons dire c’est que les trajectoires 1 et 2 doivent être identiques puisque ces fronts d’onde sont identiques avec la même énergie (par exemple pour chaque photon), effectuent le trajet sur la même distance entre les mêmes hauteurs et se propagent dans une gravité identique puisque constante.
Par contre, le temps de durée des impulsions sont différents, la ligne horizontale supérieure devant être plus grande que celle inférieure. Mais une telle construction est impossible dans un espace euclidien ou dans l’espace-temps de Minkowski ! Cela signifie deux choses :
L’espace-temps n’est pas de Minkowski en présence de la gravité. Il doit être déformé afin d’autoriser une déformation du parallélogramme. C’est-à-dire que l’espace ou l’espace-temps doit être affecté d’une courbure.
La relativité restreinte n’est pas applicable en présence de la gravité, au moins sur une certaine extension spatiale.
II.4. Espace-temps courbe Riemann avait déjà envisagé une description de la physique en employant un espace courbe, mais cela n’avait pas eu le succès escompté. Est-ce qu’un espace courbe suffit ou faut-il employé un espace-temps courbe, c’est-à-dire une variété à quatre dimensions avec une courbure en chaque point ? Un espace courbe mais sans que le temps soit affecté ne suffit pas pour plusieurs raisons :
On l’a vu, la gravité affecte l’écoulement du temps. Par conséquent une simple distorsion spatiale ne suffirait pas. Dans la section précédente, cela affecterait la forme des trajectoires 1 et 2 mais rendrait la construction impossible sans que les distances horizontales du graphique (c’est-à-dire le temps) soient affectées.
Nous verrons que l’on va décrire les effets de la gravité par la courbure de l’espace-temps. Par exemple, les orbites des planètes sont la conséquence de la courbure de l’espace-temps. Les planètes suivent les géodésiques de cet espace courbé. Si l’on a deux corps passant au même endroit avec des vitesses ayant même direction, ces corps devraient suivre la même géodésique de l’espace. Ce n’est manifestement pas le cas. La grandeur de la vitesse doit intervenir. Leurs lignes d’univers dans l’espace-temps n’ont alors pas la même direction et la courbure de l’espace-temps peut conduire à des trajectoires différentes.
De plus, il est assez évident en regardant la trajectoire de la Lune que l’espace n’est pas courbé au point de permettre une trajectoire circulaire. Cela conduirait à une gigantesque déformation des images des étoiles. Par contre si la Lune suit une ligne d’univers seulement légèrement courbée dans l’espace-temps, le facteur élevé dans la composante du temps des intervalles conduit à une « compression » apparente des lignes d’univers lorsqu’on les exprime en coordonnées x, y, z, t. La faible courbure de la ligne d’univers dans l’espace-temps donne alors une courbure importante de la trajectoire dans l’espace.
II.5. Principe d’équivalence
Principe d’équivalence faible La physique classique introduit deux sortes de masses. La masse inertielle est celle qui intervient dans le principe fondamental de la dynamique :

Elle traduit la résistance d’un corps à la mise en mouvement. La masse pesante est celle qui intervient dans la loi de l’attraction universelle. Par exemple pour un corps de masse pesante et la terre de masse M avec leurs centres séparés de la distance r, la
force d’attraction est donnée par :
L’expérience montre que quel que soit le corps et sa composition, ces deux masses sont proportionnelles avec un coefficient de proportionnalité constant à mieux que près. Si l’on choisit des unités de mesures de façon à avoir une constante de proportionnalité égale à un, on a donc :
Avec une très grande précision.
Principe d’équivalence fort Il est difficile d’imaginer que cette égalité soit une coïncidence. Si les deux masses sont systématiquement égales avec une grande précision en toute circonstance et pour tout corps, on peut légitimement se demander si parler de deux masses a un sens. En tout cas, au moins d’un point de vue expérimental, on peut affirmer : il n’existe qu’une seule et même masse m. Cela a des conséquences immédiates. Ainsi, si l’on utilise les relations précédentes, on trouve :
C’est-à-dire que l’accélération subie par un corps soumis à l’attraction terrestre (ou autre) ne dépend que de la masse de la Terre et du lieu (donnant la distance r). Pour peu que le corps en question soit suffisamment petit pour que la gravité ne varie pas notablement d’un point à l’autre du corps et suffisamment peu massif pour ne pas provoquer en retour un mouvement notable de la Terre. C’est généralement le cas en pratique mais, par exemple, la Lune ne répond pas à ces exigences. Un tel corps est appelé corps test. L’accélération ainsi déterminée est appelée accélération de la pesanteur, notée g et ne dépend pas du corps test considéré. Réalisons les expériences suivantes :
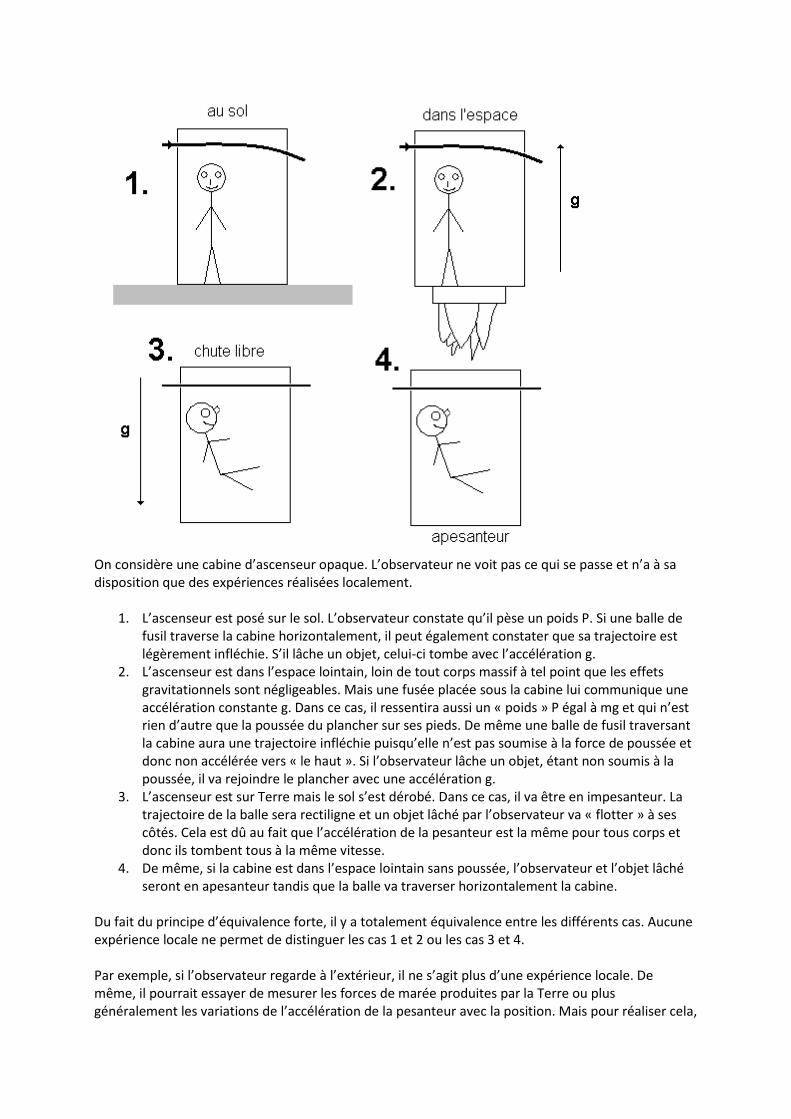
On considère une cabine d’ascenseur opaque. L’observateur ne voit pas ce qui se passe et n’a à sa disposition que des expériences réalisées localement.
1. L’ascenseur est posé sur le sol. L’observateur constate qu’il pèse un poids P. Si une balle de fusil traverse la cabine horizontalement, il peut également constater que sa trajectoire est légèrement infléchie. S’il lâche un objet, celui-ci tombe avec l’accélération g.
2. L’ascenseur est dans l’espace lointain, loin de tout corps massif à tel point que les effets gravitationnels sont négligeables. Mais une fusée placée sous la cabine lui communique une accélération constante g. Dans ce cas, il ressentira aussi un « poids » P égal à mg et qui n’est rien d’autre que la poussée du plancher sur ses pieds. De même une balle de fusil traversant la cabine aura une trajectoire infléchie puisqu’elle n’est pas soumise à la force de poussée et donc non accélérée vers « le haut ». Si l’observateur lâche un objet, étant non soumis à la poussée, il va rejoindre le plancher avec une accélération g.
3. L’ascenseur est sur Terre mais le sol s’est dérobé. Dans ce cas, il va être en impesanteur. La trajectoire de la balle sera rectiligne et un objet lâché par l’observateur va « flotter » à ses côtés. Cela est dû au fait que l’accélération de la pesanteur est la même pour tous corps et donc ils tombent tous à la même vitesse.
4. De même, si la cabine est dans l’espace lointain sans poussée, l’observateur et l’objet lâché seront en apesanteur tandis que la balle va traverser horizontalement la cabine.
Du fait du principe d’équivalence forte, il y a totalement équivalence entre les différents cas. Aucune expérience locale ne permet de distinguer les cas 1 et 2 ou les cas 3 et 4. Par exemple, si l’observateur regarde à l’extérieur, il ne s’agit plus d’une expérience locale. De même, il pourrait essayer de mesurer les forces de marée produites par la Terre ou plus généralement les variations de l’accélération de la pesanteur avec la position. Mais pour réaliser cela,
il faut une certaine « extension spatiale » (pour comparer plusieurs points) et on ne peut plus parler d’expérience locale. On peut donc dire que localement, la gravitation est physiquement totalement équivalente à une accélération.
Conséquences Tous les repères étant équivalents, les quatre situations ci-dessus doivent pouvoir se décrire par la situation locale de l’observateur. Les situations 3 et 4 étant équivalentes, on en déduit que sur Terre, les référentiels inertiels sont les référentiels en chute libre. Il est donc possible de décrire la gravité uniquement sur des bases purement cinématiques. Mais on sait aussi que la gravité varie de point en point. Elle diminue avec l’altitude et elle change de direction quand on tourne autour de la Terre. Les différents repères inertiels ne peuvent donc se déduire simplement de translations à vitesse uniforme. Cela signifie que l’espace-temps doit être courbe de manière à autoriser des repères inertiels appropriés. Nous avions déjà constaté que l’espace-temps devait être courbe. On rejoint cette conclusion nous disant que l’on peut avoir une description locale reliée à la géométrie de l’espace-temps et de sa courbure.
Formulation moderne On aboutit ainsi à une formulation moderne du principe d’équivalence. L’espace-temps peut être représenté par une variété différentielle courbe quelconque (mais reliée à la distribution de matière). En chaque point, on a un espace tangent (tout comme on a une droite tangente à une courbe ou un plan tangent à une surface courbe, sauf points pathologiques) qui est décrit par la géométrie de Minkowski. Cet espace tangent permet de définir en ce point la classe des repères inertiels, c’est-à-dire les référentiels en chute libre.
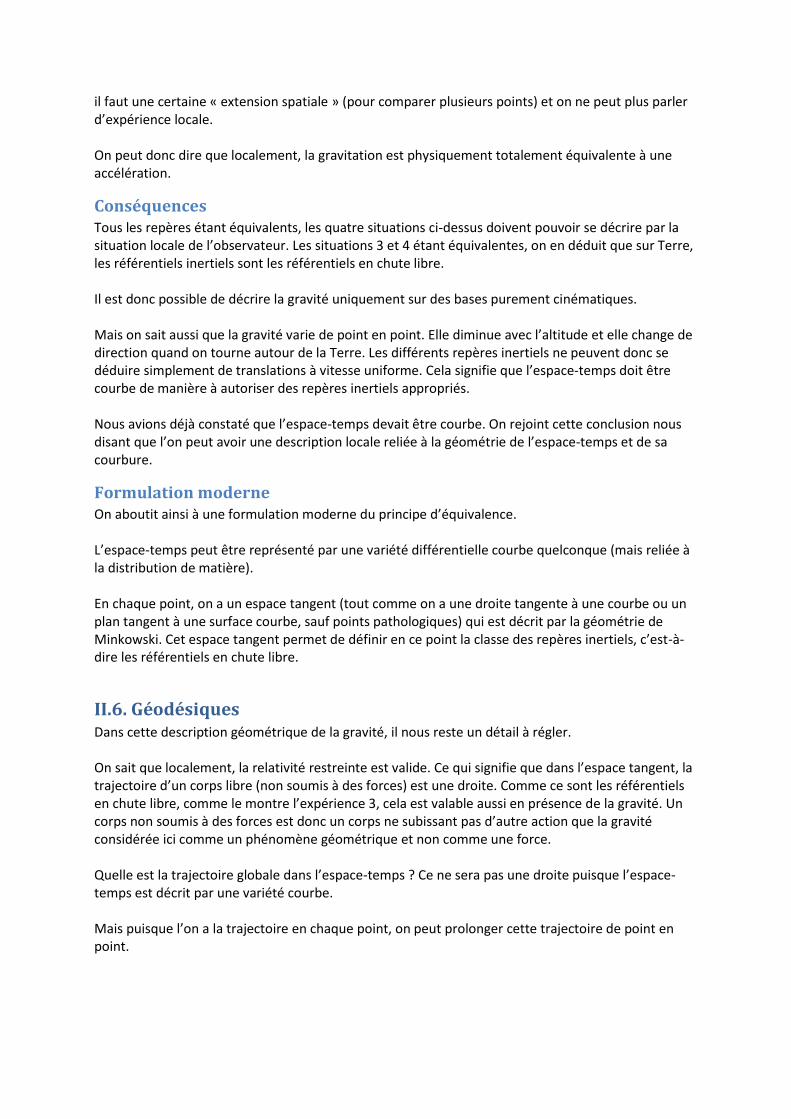
II.6. Géodésiques Dans cette description géométrique de la gravité, il nous reste un détail à régler. On sait que localement, la relativité restreinte est valide. Ce qui signifie que dans l’espace tangent, la trajectoire d’un corps libre (non soumis à des forces) est une droite. Comme ce sont les référentiels en chute libre, comme le montre l’expérience 3, cela est valable aussi en présence de la gravité. Un corps non soumis à des forces est donc un corps ne subissant pas d’autre action que la gravité considérée ici comme un phénomène géométrique et non comme une force. Quelle est la trajectoire globale dans l’espace-temps ? Ce ne sera pas une droite puisque l’espace-temps est décrit par une variété courbe. Mais puisque l’on a la trajectoire en chaque point, on peut prolonger cette trajectoire de point en point.
Ces trajectoires sont appelées géodésiques de la variété. Par exemple, sur la sphère il est clair (en prolongeant indéfiniment une ligne de chemin de fer bien « droite », localement droite) que les géodésiques sont les grands cercles (équateurs, méridiens).
Bien entendu, si des forces sont appliquées au corps en mouvement, sa trajectoire ne sera plus géodésique. C’est évidemment une description intuitive. Nous avons besoin d’une approche plus quantitative, ce à quoi nous allons nous attacher en commençant par la métrique.
III. Métrique
Métrique de l’espace tangent L’espace tangent obéit à la géométrie de Minkowski. Par conséquent, on peut choisir un système de coordonnées cartésien avec l’intervalle :
Où est le tenseur métrique de Minkowski avec les éléments non diagonaux nuls et les éléments diagonaux (-1, 1, 1, 1).
Métrique de l’espace-temps courbe Comment construire la métrique d’un espace-temps courbe ? On peut bien sûr donner la métrique de Minkowski de l’espace tangent en chaque point. Mais nous ne savons pas quelle peut être la relation entre les descriptions entre deux points. Nous avons besoin d’une métrique décrivant l’espace-temps courbe lui-même. La solution est donnée par la notion même de métrique : c’est un outil permettant de décrire les distances (intervalles) entre deux points.
Les distances
Une première approche est donc de partir de ces distances. On cartographie l’espace à métriser avec un ensemble de points remarquables. Pour l’espace-temps, ce sera ce qui s’y passe, c’est-à-dire les événements. Prenons l’exemple de la surface de la Terre. Dans ce cas, ces points remarquables seront des immeubles, des arbres des rochers, des points d’eau, etc. Si l’on choisit de placer des points environ tous les 500 m, il faut approximativement 20 millions de points pour couvrir toute la surface (nous ignorons par facilité ici la problématique des océans). Il faut considérer suffisamment de points pour que les variations locales de la topographie soient prises en compte. Tout dépend de la précision souhaitée. Ne connaissant pas a priori la forme géométrique de l’espace à cartographier, on va dresser une table avec la distance entre chaque paire de points, mesurée par un processus physique quelconque (par exemple des rayons lumineux échangés entre points ou entre événements, ou des étalons de longueur, etc.) Si l’on a choisi n points, il faut donc mesurer distances. Pour notre exemple, cela ferait valeurs. Si l’on imprimait 200 distances par pages, il faudrait mille milliards de pages pour tout cartographier !
Points voisins
Autant de distances n’est pas nécessaire pour cartographier l’espace. Il suffit de considérer seulement les points voisins. On obtient ainsi une « triangulation » de la surface. C’est le procédé utilisé par les géomètres pour cartographier une surface étendue accidentée. Combien de points voisins faut-il considérer. L’idée intuitive c’est que la structure « en treilli » ainsi constituée par les points et les liens qui les joignent soit « rigide ». C’est-à-dire qu’étant connu les positions des points voisins de P et les distances à P, on peut déterminer la position de P sans ambiguïté. Techniquement, si l’espace est à N dimensions, il faut N+1 points. Par exemple, pour la surface à deux dimensions de la Terre, si vous avez les points P1 et P2 et les distances D1 et D2 à P, vous pouvez tracer un cercle de rayon D1 autour de P1 et un cercle de rayon D2 autour de P2. Sauf coup de chance, ces deux cercles auront deux points d’intersection. Par conséquent, il faut un troisième point pour distinguer ces deux solutions possibles pour la position de P. En pratique les géomètres prennent plus de points afin d’améliorer la précision. Mais au moins théoriquement nous savon que nous avons besoin de 5 voisins pour un espace-temps à 4 dimensions. Si l’on conserve de nombre, notre tableau ne contient plus que 50 millions de distances.
Métrique
Le principe de correspondance nous dit que localement, la relativité restreinte est applicable. Cela signifie que dans un voisinage suffisamment petit du point P, la géométrie euclidienne est applicable pour l’espace ou la géométrie de Minkowski pour l’espace-temps. C’est une situation heureuse car cette géométrie est bien connue et nous permet de déterminer la position de P à partir des points voisins et des distances fournies. Si l’on choisit dans le voisinage du point P un système de coordonnées cartésien, alors la distance entre deux points voisins sera donnée par : À quatre dimensions. Les distances ds étant données, il suffit alors de résoudre le système d’équations pour connaitre les coordonnées des points étudiés.
Forme générale
Nous souhaitons définir un système de coordonnées unique pour l’ensemble de notre variété courbe. Ce qui signifie que l’on ne peut pas choisir un système de coordonnées cartésien arbitraire en chaque point. Le système de coordonnées est imposé. L’espace voisin d’un point reste toutefois euclidien ou de Minkowski. Au pire, nous aurons donc dans l’espace tangent un système d’axes qui ne sont pas orthonormés. Auquel cas, la distance prend la forme plus générale :
La prochaine étape évidente est de passer à une formulation mathématique infinitésimale :
Bien sûr, ce n’est qu’une forme mathématique. Pour cartographier un espace, on ne va pas disposer une infinité de point. Et pour l’espace-temps, nous avons bien dit que celui-ci était défini par ce qui s’y passe et il y a des endroits où il ne se passe rien. Mais l’important est qu’aux points physiquement pertinents (événements, points mesurés,…) cette formulation donne les mêmes résultats. Ce qui est toujours possible en choisissant des fonctions qui interpolent les résultats précédents. On peut ainsi supposer sans perte de généralité que la métrique est une fonction analytique des
coordonnées du point P (sauf éventuelles singularités de la variété). En chaque point, est un tenseur. est donc un champ de tenseurs sur la variété.
Il est toujours possible de modifier le système de coordonnées de manière à ce qu’en un point particulier les axes coordonnées sont orthonormés, ce qui redonne la métrique de Minkowski : . Mais cela n’est possible qu’en un point.
Le tenseur métrique permet d’abaisser et de lever les indices, ce qui est un résultat standard de l’algèbre linéaire. Par exemple :
.
Notons que le désir d’avoir un système de coordonnées unique n’est pas toujours possible. Par exemple, il est impossible de cartographier la sphère avec un système de coordonnées unique ne présentant aucune singularité. Dans le système des latitudes et longitudes, les pôles constituent des singularités où la longitude est indéfinie. Ces singularités sont gênantes puisque ce ne sont pas de vraies singularités, tous les points de la sphère étant équivalents.
On palie à cette difficulté en établissant un ensemble de cartes, c’est-à-dire des portions de l’espace complet qui se chevauchent et qui toutes réunies recouvrent toute la variété (par exemple une carte de l’hémisphère nord jusque, disons, la latitude 5° sud et une carte de l’hémisphère sud jusqu’à 5° de latitude nord). On décrit sur chaque carte un système de coordonnées approprié ainsi que la manière de passer des coordonnées d’une carte à une autre dans les zones de chevauchement. L’ensemble des cartes constituent un Atlas.
IV. Dérivée covariante
IV.1. Transport parallèle
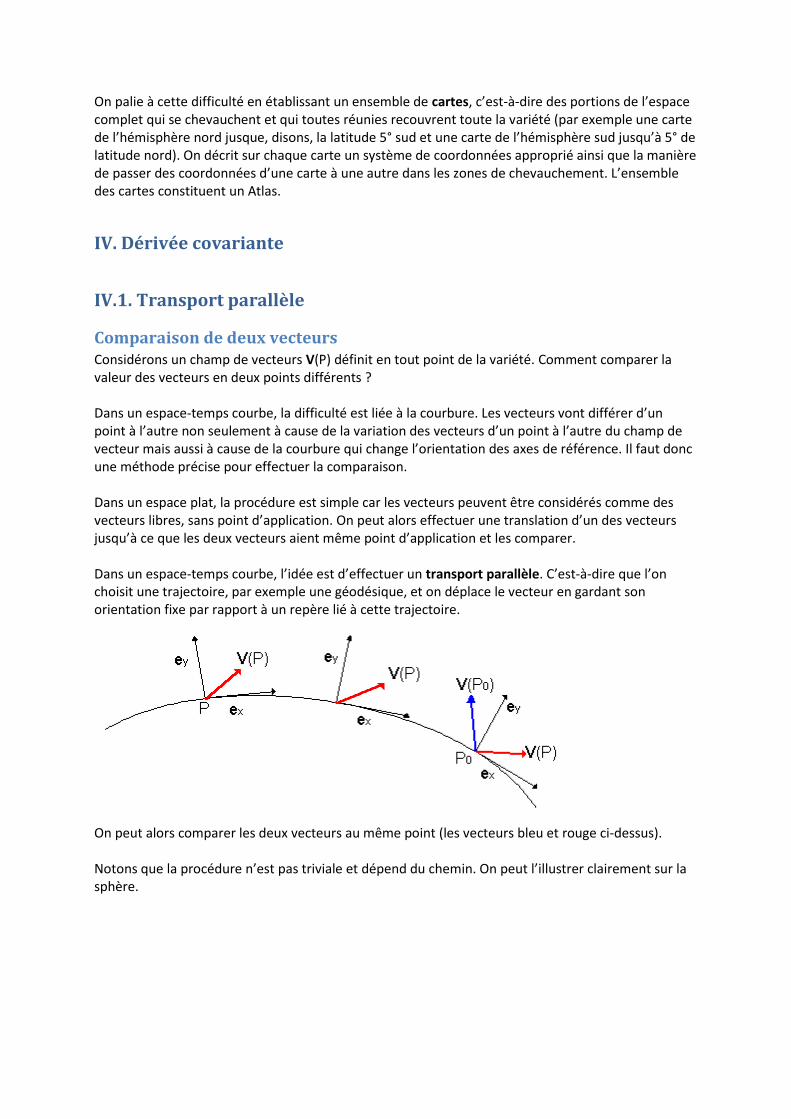
Comparaison de deux vecteurs Considérons un champ de vecteurs V(P) définit en tout point de la variété. Comment comparer la valeur des vecteurs en deux points différents ? Dans un espace-temps courbe, la difficulté est liée à la courbure. Les vecteurs vont différer d’un point à l’autre non seulement à cause de la variation des vecteurs d’un point à l’autre du champ de vecteur mais aussi à cause de la courbure qui change l’orientation des axes de référence. Il faut donc une méthode précise pour effectuer la comparaison. Dans un espace plat, la procédure est simple car les vecteurs peuvent être considérés comme des vecteurs libres, sans point d’application. On peut alors effectuer une translation d’un des vecteurs jusqu’à ce que les deux vecteurs aient même point d’application et les comparer. Dans un espace-temps courbe, l’idée est d’effectuer un transport parallèle. C’est-à-dire que l’on choisit une trajectoire, par exemple une géodésique, et on déplace le vecteur en gardant son orientation fixe par rapport à un repère lié à cette trajectoire.
On peut alors comparer les deux vecteurs au même point (les vecteurs bleu et rouge ci-dessus). Notons que la procédure n’est pas triviale et dépend du chemin. On peut l’illustrer clairement sur la sphère.
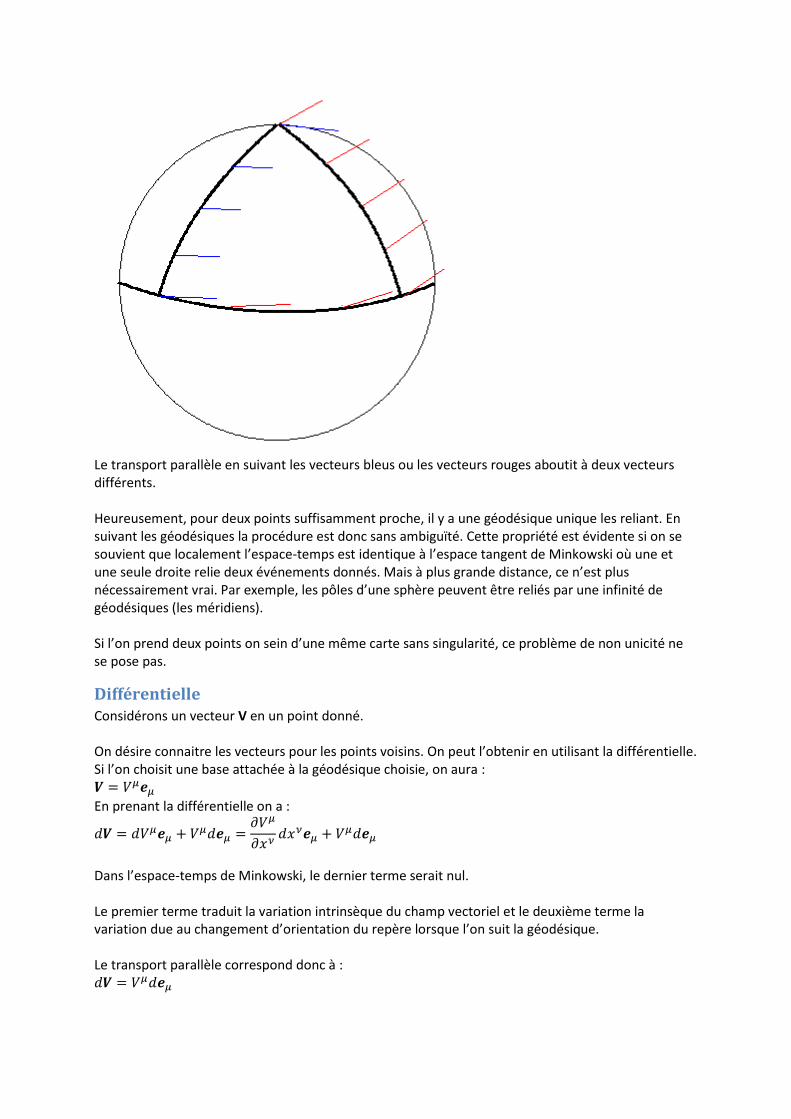
Le transport parallèle en suivant les vecteurs bleus ou les vecteurs rouges aboutit à deux vecteurs différents. Heureusement, pour deux points suffisamment proche, il y a une géodésique unique les reliant. En suivant les géodésiques la procédure est donc sans ambiguïté. Cette propriété est évidente si on se souvient que localement l’espace-temps est identique à l’espace tangent de Minkowski où une et une seule droite relie deux événements donnés. Mais à plus grande distance, ce n’est plus nécessairement vrai. Par exemple, les pôles d’une sphère peuvent être reliés par une infinité de géodésiques (les méridiens). Si l’on prend deux points on sein d’une même carte sans singularité, ce problème de non unicité ne se pose pas.
Différentielle Considérons un vecteur V en un point donné. On désire connaitre les vecteurs pour les points voisins. On peut l’obtenir en utilisant la différentielle. Si l’on choisit une base attachée à la géodésique choisie, on aura :
En prenant la différentielle on a :
Dans l’espace-temps de Minkowski, le dernier terme serait nul. Le premier terme traduit la variation intrinsèque du champ vectoriel et le deuxième terme la variation due au changement d’orientation du repère lorsque l’on suit la géodésique. Le transport parallèle correspond donc à :
On peut exprimer la différentielle du vecteur de base en le décomposant sur la base :
C’est ce terme que nous devons maintenant étudier.
IV.2. Connexion On va partir maintenant dans une petite excursion algébrique pour relier la relation précédente au tenseur métrique. Ces petites excursions sont inévitables mais nous ferons au plus simple.
Symboles de Christoffel Les coefficients
sont infinitésimaux. On peut donc les écrire sous la forme :
Les coefficients sont appelés symboles de Christoffel. On dit aussi connexion ou connexion affine. Ce n’est pas un tenseur. Vérifions les relations entre les différentes grandeurs. En multipliant la dernière relation de la section précédente, on a :
On peut également écrire ces coefficients sous une forme appropriée :
Comme , on a :
Cela donne ainsi :
Et de même :
Relations entre les symboles Partons de
En différentiant cette relation, on a :
En remplaçant par la définition des différentielles des vecteurs de base, cela donne : ( )
( )
Comme on a :
Alors l’expression précédente devient =
( )
On peut écrire d’autre part :

En comparant ces deux expressions, on trouve :
(1)
Considérons le vecteur M tel que . Sauf cas pathologiques, M a des
dérivées secondes qui ne dépendent pas de l’ordre de l’intégration. On a donc
D’autre part, on a :
(
)
( )
Ce qui signifie que :
Compte tenu de ces relations, on peut écrire la dérivée seconde de M comme
( )
On obtient de même :
Ces deux relations étant égales, on doit avoir
Et donc
Relations avec la métrique En utilisant la dernière relation dans (1) , on a :
En effectuant une permutation circulaire des indices, on a donc aussi :
En faisant la somme des deux premières relations et en soustrayant la troisième, on trouve :
(
)
Soit
(
)
Exercices
1. ✰✰✰ Considérons un changement de base donné par la matrice de changement de base
. Pouvez-vous calculer :
a. Comment se comporte la dérivée ordinaire lors d’un changement de base ? b. Comment se comporte la connexion lors d’un changement de base ?

Pouvez-vous en conclure quelque chose concernant leur caractère vectoriel ou tensoriel ?
IV.3. Dérivée covariante Revenons à la forme différentielle :
La dérivée ordinaire n’est pas un tenseur, ce qui se comprend assez bien puisque la variation du champ dépend autant de la variation intrinsèque de celui-ci que de la variation du tempère le long de la géodésique. On souhaiterait donc avoir une forme telle que
La première expression peut s’écrire
Soit :
Après changement du nom des indices :
Et par comparaison :
Cette forme est appelée dérivée covariante et elle se comporte comme un tenseur. Lorsque l’on a des équations relativistes il suffit de remplacer les dérivées ordinaires par les dérivées covariantes pour avoir leur forme adaptée à la relativité générale.
Exercices
1. ✰✰✰ Effectuez le même exercice que dans la section précédente mais sur la dérivée covariante. Vérifiez qu’elle se comporte bien comme un tenseur.
V. Equation des géodésiques Une particule qui n’est soumise à aucune force suit dans l’espace-temps une trajectoire rectiligne. Cela peut s’exprimer simplement en disant que la quantité de mouvement reste invariante. Dans l’espace-temps courbe général, cela reste vrai en vertu du principe d’équivalence. Mais nous connaissons la différentielle d’un vecteur :
On peut ensuite choisir un paramétrage quelconque de la trajectoire. Pour une particule massive, l’idéal est de choisir le temps propre . On a donc :
Où u est la quadrivecteur vitesse qui ne diffère de p que par une constante (la masse). Ces relations nous donnent donc :
En exprimant la dérivée covariante, on trouve :
(
)
En utilisant le temps propre, on a :
(
)
C’est-à-dire :
C’est l’équation des géodésiques qui décrit la trajectoire d’une particule libre. On peut montrer facilement que cette équation reste valable pour un rayon lumineux à condition de remplacer le temps propre par un paramétrage quelconque s, et en remplaçant les vitesses par .
Exercices
1. ✰✰✰ Une géodésique est aussi un extremum de longueur entre deux points. Sauriez-vous le démontrer ? Hint. Calculez le temps propre entre deux points le long d’une trajectoire quelconque. Utilisez les conditions de Lagrange pour calculer la trajectoire qui rend extremum le temps propre.
VI. Tenseur de courbure Pour la suite, nous avons besoin d’une dernière chose : décrire la courbure de l’espace-temps. Nous allons d’abord présenter le concept de courbure en général puis voir l’aspect quantitatif.
VI.1. Courbure
Courbures intrinsèques et extrinsèques Il existe, pour les variétés (surfaces, courbes, …), deux types de courbure.
La courbure extrinsèque résulte de la représentation de l’objet géométrique dans un espace plus grand. Par exemple, lorsque l’on représente une sphère dans l’espace à trois dimensions ordinaire. Le fait de replier l’objet sur lui-même lui donne une courbure.
La courbure intrinsèque est reliée à la géométrie de la variété et ne dépend pas de sa représentation.
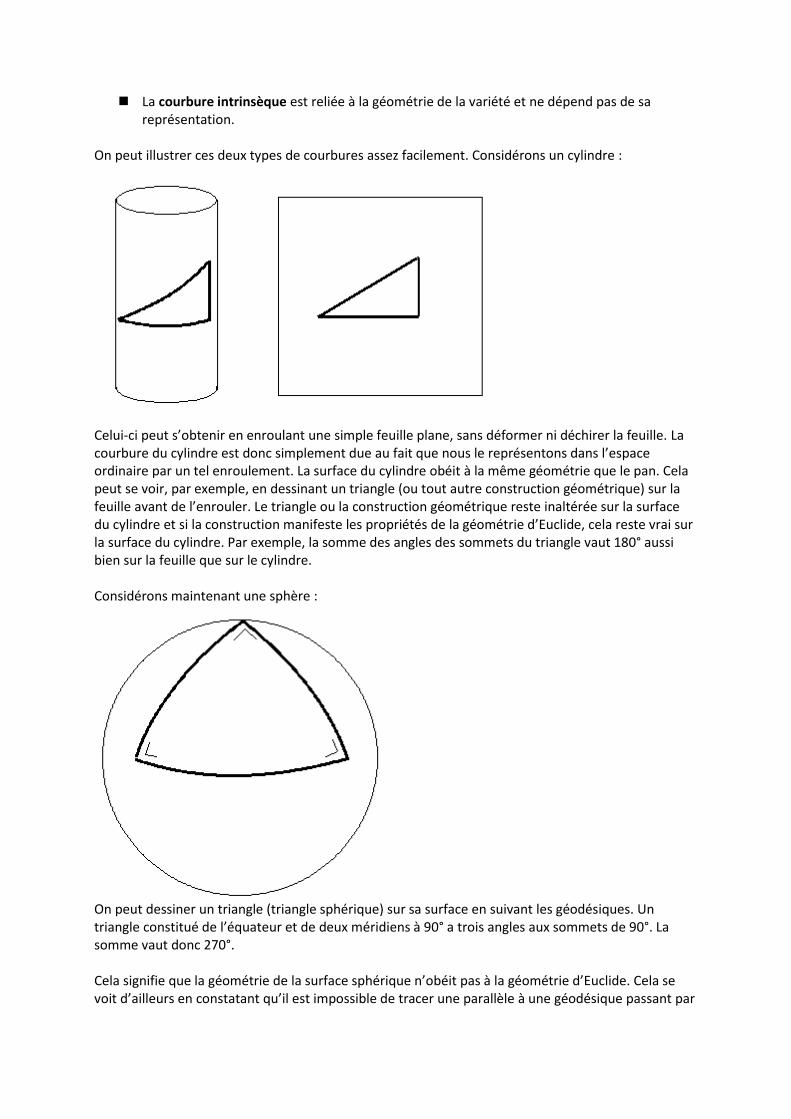
On peut illustrer ces deux types de courbures assez facilement. Considérons un cylindre :
Celui-ci peut s’obtenir en enroulant une simple feuille plane, sans déformer ni déchirer la feuille. La courbure du cylindre est donc simplement due au fait que nous le représentons dans l’espace ordinaire par un tel enroulement. La surface du cylindre obéit à la même géométrie que le pan. Cela peut se voir, par exemple, en dessinant un triangle (ou tout autre construction géométrique) sur la feuille avant de l’enrouler. Le triangle ou la construction géométrique reste inaltérée sur la surface du cylindre et si la construction manifeste les propriétés de la géométrie d’Euclide, cela reste vrai sur la surface du cylindre. Par exemple, la somme des angles des sommets du triangle vaut 180° aussi bien sur la feuille que sur le cylindre. Considérons maintenant une sphère :
On peut dessiner un triangle (triangle sphérique) sur sa surface en suivant les géodésiques. Un triangle constitué de l’équateur et de deux méridiens à 90° a trois angles aux sommets de 90°. La somme vaut donc 270°. Cela signifie que la géométrie de la surface sphérique n’obéit pas à la géométrie d’Euclide. Cela se voit d’ailleurs en constatant qu’il est impossible de tracer une parallèle à une géodésique passant par
un point (deux grands cercles se coupent toujours). Sa géométrie s’appelle bien évidemment géométrie sphérique. Le cylindre possède seulement une courbure extrinsèque. Tandis que la sphère possède une courbure extrinsèque (le fait que la surface nous apparait courbée dans l’espace ordinaire) mais aussi une courbure intrinsèque. En relativité générale, c’est la géométrie de l’espace-temps qui est reliée aux propriétés de la gravité et du mouvement. Par conséquent, la courbure importante est la courbure intrinsèque. La courbure extrinsèque peut être totalement ignorée car il n’est pas besoin de dessiner l’espace-temps dans un espace plus grand. L’espace-temps peut être considéré pour lui-même. Les représentations graphiques (comme les surfaces déformées par la masse d’une étoile que vous avez certainement déjà vu) peuvent même être trompeuses car on ne peut généralement pas représenter l’espace-temps dans l’espace ordinaire sans perdre l’une ou l’autre de ses propriétés géométriques (déjà du simple fait que l’espace-temps est à quatre dimensions).
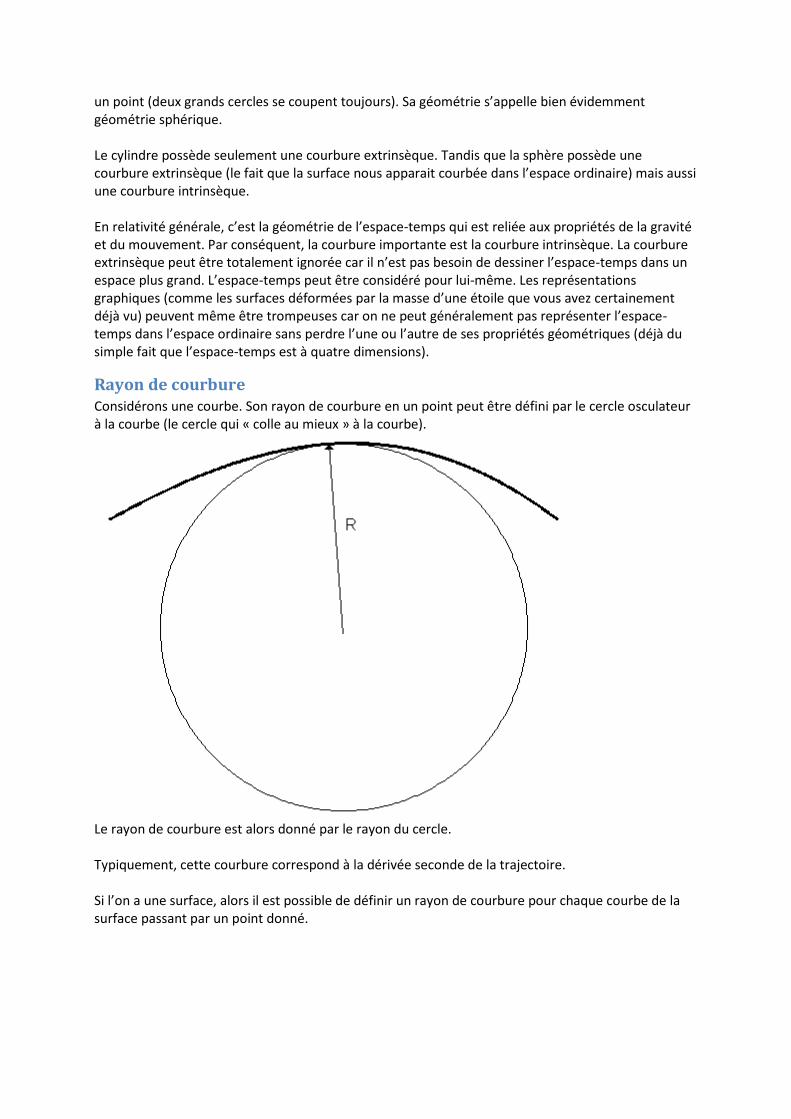
Rayon de courbure Considérons une courbe. Son rayon de courbure en un point peut être défini par le cercle osculateur à la courbe (le cercle qui « colle au mieux » à la courbe).
Le rayon de courbure est alors donné par le rayon du cercle. Typiquement, cette courbure correspond à la dérivée seconde de la trajectoire. Si l’on a une surface, alors il est possible de définir un rayon de courbure pour chaque courbe de la surface passant par un point donné.
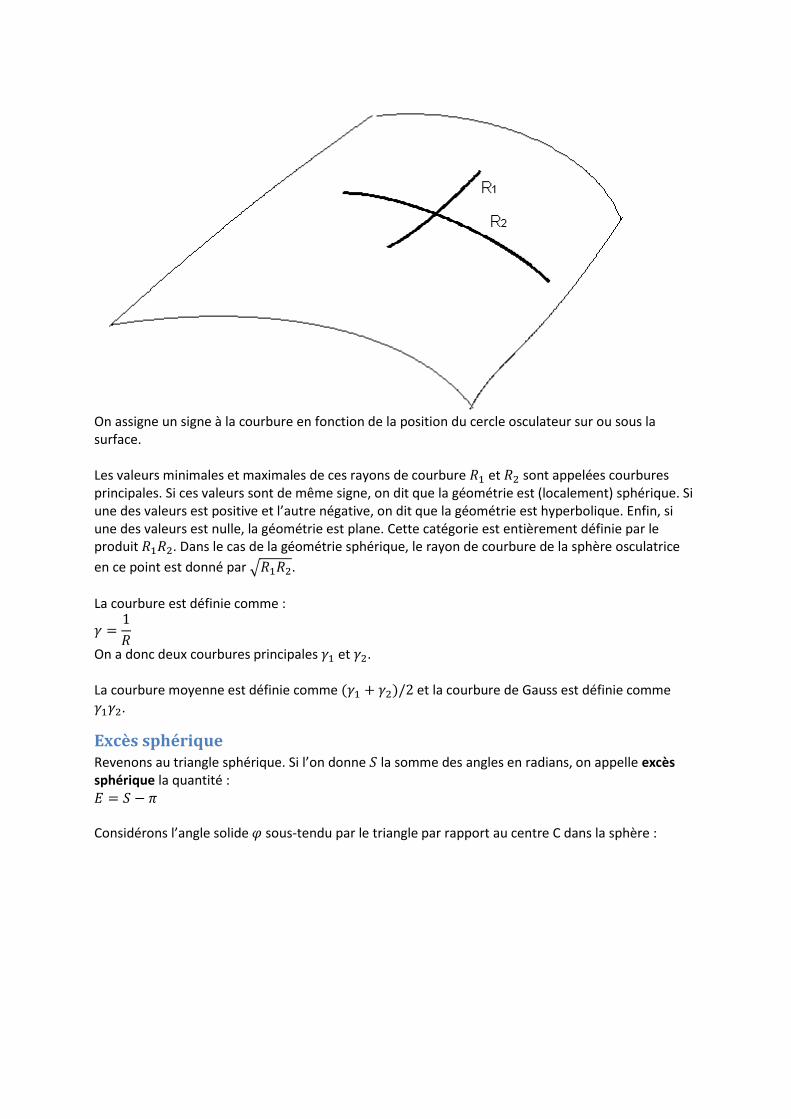
On assigne un signe à la courbure en fonction de la position du cercle osculateur sur ou sous la surface. Les valeurs minimales et maximales de ces rayons de courbure et sont appelées courbures principales. Si ces valeurs sont de même signe, on dit que la géométrie est (localement) sphérique. Si une des valeurs est positive et l’autre négative, on dit que la géométrie est hyperbolique. Enfin, si une des valeurs est nulle, la géométrie est plane. Cette catégorie est entièrement définie par le produit . Dans le cas de la géométrie sphérique, le rayon de courbure de la sphère osculatrice
en ce point est donné par √ .
La courbure est définie comme :
On a donc deux courbures principales et . La courbure moyenne est définie comme et la courbure de Gauss est définie comme .
Excès sphérique Revenons au triangle sphérique. Si l’on donne la somme des angles en radians, on appelle excès sphérique la quantité : Considérons l’angle solide sous-tendu par le triangle par rapport au centre C dans la sphère :
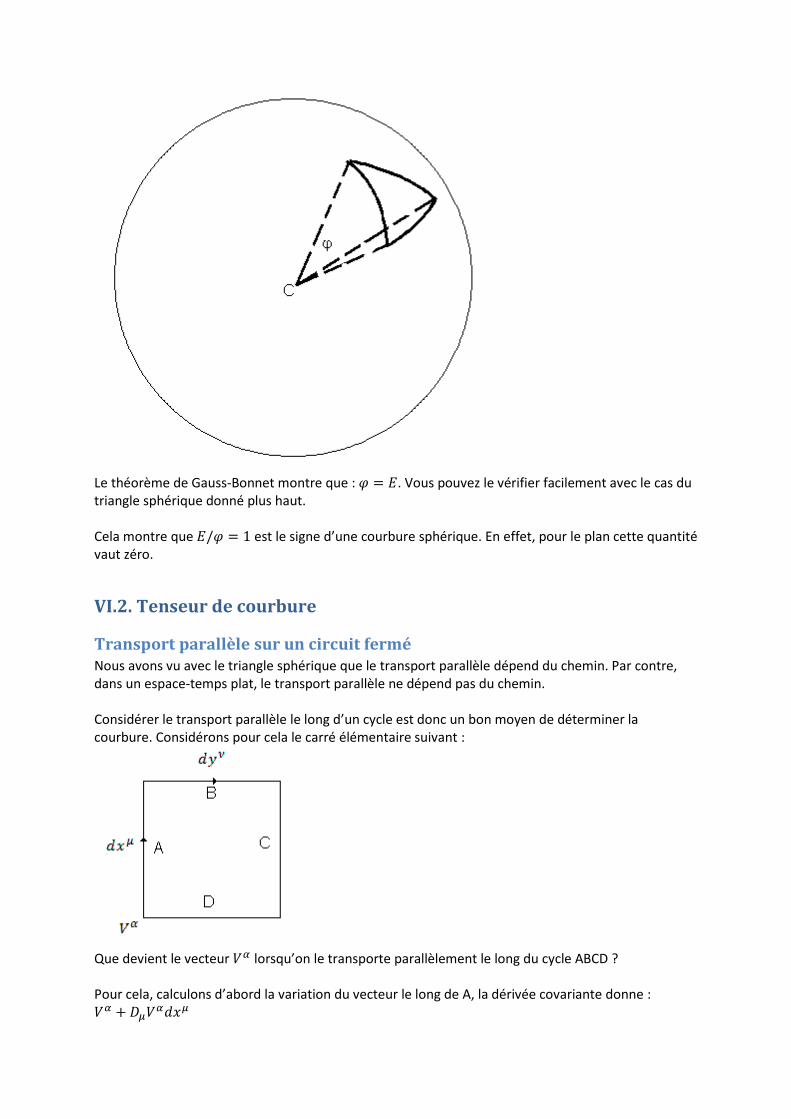
Le théorème de Gauss-Bonnet montre que : . Vous pouvez le vérifier facilement avec le cas du triangle sphérique donné plus haut. Cela montre que est le signe d’une courbure sphérique. En effet, pour le plan cette quantité vaut zéro.
VI.2. Tenseur de courbure
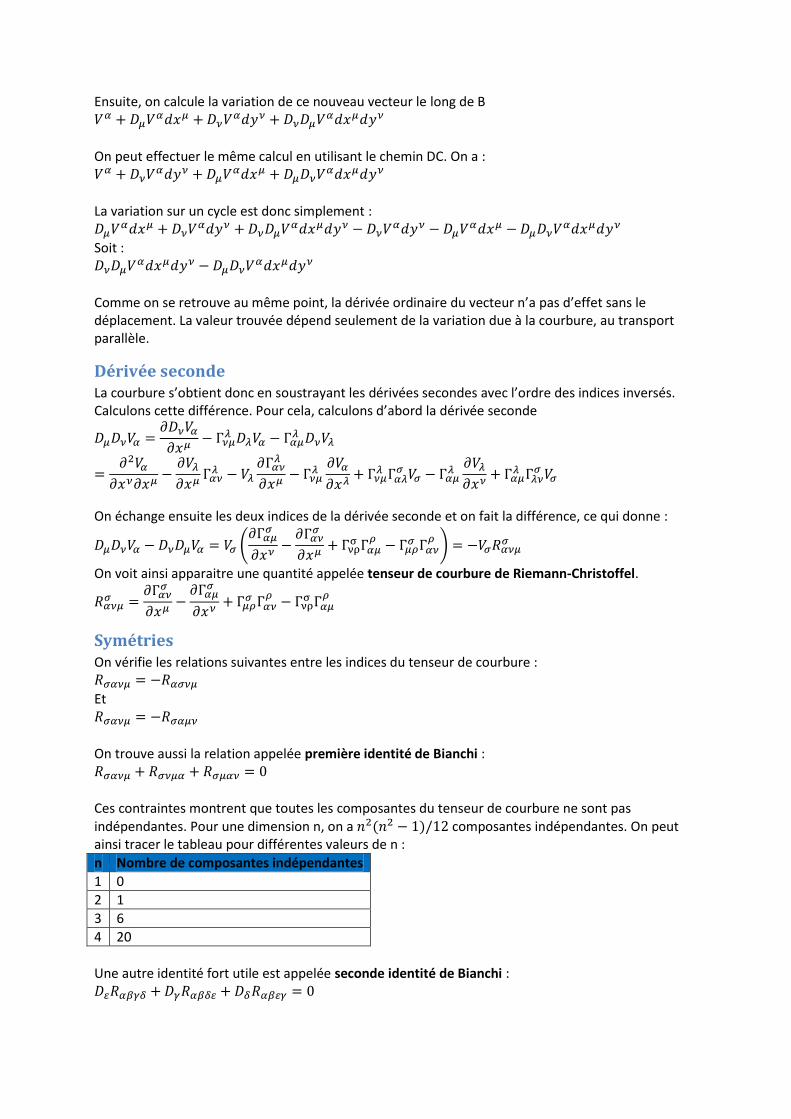
Transport parallèle sur un circuit fermé Nous avons vu avec le triangle sphérique que le transport parallèle dépend du chemin. Par contre, dans un espace-temps plat, le transport parallèle ne dépend pas du chemin. Considérer le transport parallèle le long d’un cycle est donc un bon moyen de déterminer la courbure. Considérons pour cela le carré élémentaire suivant :
Que devient le vecteur lorsqu’on le transporte parallèlement le long du cycle ABCD ? Pour cela, calculons d’abord la variation du vecteur le long de A, la dérivée covariante donne :
Ensuite, on calcule la variation de ce nouveau vecteur le long de B
On peut effectuer le même calcul en utilisant le chemin DC. On a :
La variation sur un cycle est donc simplement :
Soit :
Comme on se retrouve au même point, la dérivée ordinaire du vecteur n’a pas d’effet sans le déplacement. La valeur trouvée dépend seulement de la variation due à la courbure, au transport parallèle.
Dérivée seconde La courbure s’obtient donc en soustrayant les dérivées secondes avec l’ordre des indices inversés. Calculons cette différence. Pour cela, calculons d’abord la dérivée seconde
On échange ensuite les deux indices de la dérivée seconde et on fait la différence, ce qui donne :
(
)
On voit ainsi apparaitre une quantité appelée tenseur de courbure de Riemann-Christoffel.
Symétries On vérifie les relations suivantes entre les indices du tenseur de courbure :
Et
On trouve aussi la relation appelée première identité de Bianchi :
Ces contraintes montrent que toutes les composantes du tenseur de courbure ne sont pas indépendantes. Pour une dimension n, on a composantes indépendantes. On peut ainsi tracer le tableau pour différentes valeurs de n :
n Nombre de composantes indépendantes
1 0
2 1
3 6
4 20
Une autre identité fort utile est appelée seconde identité de Bianchi :
Autres tenseurs de courbure On obtient le tenseur de courbure de Ricci en contractant le tenseur de Riemann-Christoffel sur deux indices :
C’est un tenseur symétrique. En contractant une fois de plus, on obtient la courbure scalaire :
VI.3. Forces de marée
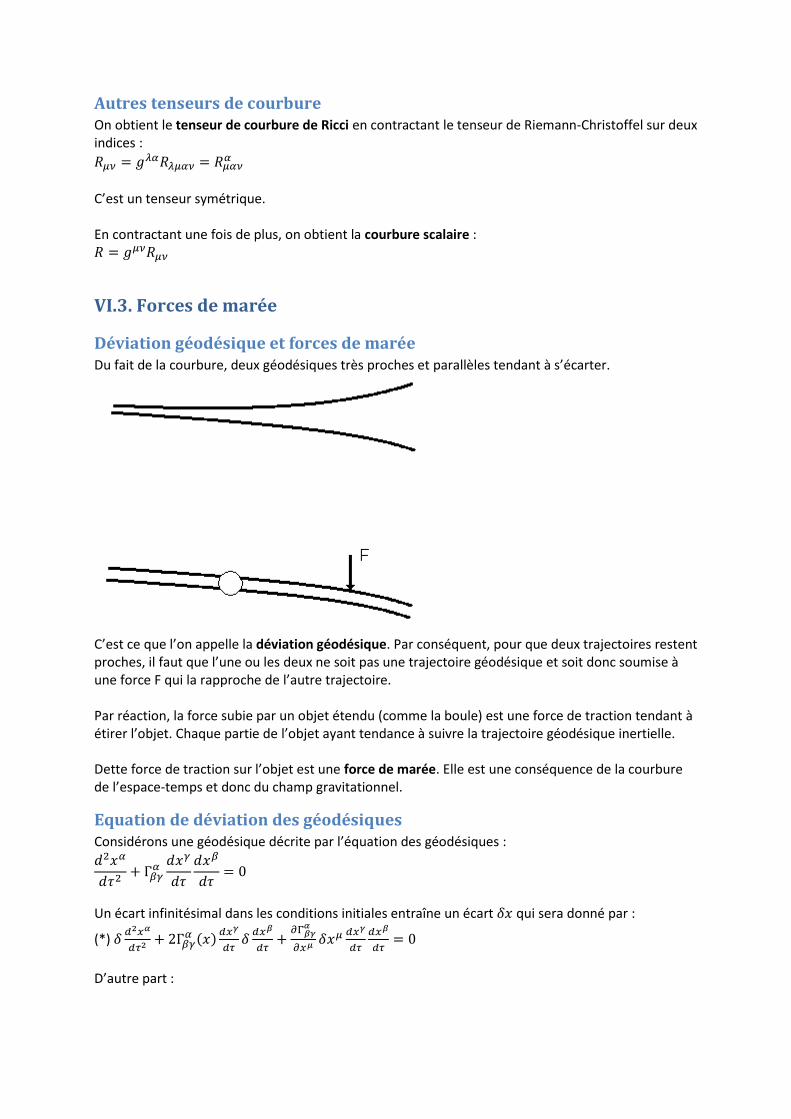
Déviation géodésique et forces de marée Du fait de la courbure, deux géodésiques très proches et parallèles tendant à s’écarter.
C’est ce que l’on appelle la déviation géodésique. Par conséquent, pour que deux trajectoires restent proches, il faut que l’une ou les deux ne soit pas une trajectoire géodésique et soit donc soumise à une force F qui la rapproche de l’autre trajectoire. Par réaction, la force subie par un objet étendu (comme la boule) est une force de traction tendant à étirer l’objet. Chaque partie de l’objet ayant tendance à suivre la trajectoire géodésique inertielle. Dette force de traction sur l’objet est une force de marée. Elle est une conséquence de la courbure de l’espace-temps et donc du champ gravitationnel.
Equation de déviation des géodésiques Considérons une géodésique décrite par l’équation des géodésiques :
Un écart infinitésimal dans les conditions initiales entraîne un écart qui sera donné par :
(*)
D’autre part :
(
) [
]
En utilisant l’équation des géodésiques pour dans cette expression et en remplaçant dans (*), on trouve
(
)
(
)
(
)
Notons
la dérivée covariante le long de la trajectoire.
On obtient ainsi au final :
Exercices
1. ✰✰ Les relations ci-dessus donnent les déviations géodésiques. Mais sauriez-vous calculer les forces de marée qui en résultent ?
VII. Equation d’Einstein
Limite newtonienne Considérons le champ de gravitation newtonien. On sait expérimentalement que la gravité newtonienne est bien respectée dans les cas suivants :
Faibles masses. Petites vitesses devant la vitesse de la lumière. Faible gravité. Champs gravitationnels lentement variables ou stationnaires. L’espace-temps est presque plat au moins dans la limite des mesures.
Considérons une particule de masse m se déplaçant dans un champ gravitationnel. Comme elle se déplace lentement, on peut négliger devant (facteur c de différence). L’équation des géodésiques peut alors s’écrire :
(
)
Ecrivons la connexion recherchée dans le cas d’un champ gravitationnel stationnaire ou lentement variable. Dans ce cas, les dérivées par rapport au temps sont négligeables par rapport aux autres termes. Il reste :
L’espace-temps étant presque plat, on écrit la métrique sous forme linéarisée :
Où les composantes de h sont très petites et constants (ou très lentement variables). En gardant les termes aux premiers ordres, la connexion devient :
En portant ce résultat dans l’équation des géodésiques ci-dessus et en négligeant la dérivée
, on trouve :
(
)
La deuxième équation donne = constant. Donc, en divisant la première équation par le carré de cette valeur, on trouve :
Equation valable à trois dimensions. Si la gravité est produite par un corps massif de masse M, comme la terre, le potentiel newtonien classique est donné à distance r de ce corps par :
Où G est la constante de gravitation universelle. Et l’équation du mouvement classique en présence de ce potentiel gravitationnel s’écrit comme pour tout mouvement dans un potentiel :
La comparaison montre donc que : + constante A l’infini, très loin du corps massif, la gravité n’agit plus. L’espace-temps en ce lieu doit être sans courbure, identique à l’espace-temps de Minkowski, et par conséquent . Comme , on a alors : Notons que nous avions relié la dilatation du temps gravitationnelle au potentiel gravitationnel. Or la dilatation du temps est directement donnée par la variation de avec r. On aurait pu ainsi retrouver ce résultat par ce biais. Considérons un corps massif de densité , le potentiel généré obéit à l’équation de Poisson : De plus, pour un tel corps, le tenseur énergie-impulsion donne : Ce qui nous conduit au final à : Cette équation n’est pas une équation tensorielle. Elle n’est même pas invariante sous les transformations de Lorentz. On sait toutefois que sous les hypothèses considérées au début, dans un référentiel attaché au corps massif, l’équation reliant la métrique à la distribution de masse doit se ramener à cette équation.

L’hypothèse de généralisation la plus simple donnant une équation entièrement relativiste est de poser :
Le tenseur placé à gauche s’appelle le tenseur d’Einstein. Etant donné l’équation ci-dessus, on s’attend à ce qu’il soit une combinaison linéaire de la métrique et de ses dérivées premières et secondes.
Equation d’Einstein Récapitulons ce que nous savons sur le tenseur d’Einstein :
1) C’est un tenseur. 2) Le tenseur énergie-impulsion étant symétrique, doit être symétrique.
3) La conservation locale de l’énergie, sous forme covariante, implique que . Cela
implique donc également .
4) La limite newtonienne donne . 5) est une combinaison linéaire de la métrique et de ses dérivées premières et secondes.
Ecrivons la seconde identité de Bianchi :
Ou en composantes mixtes
Si l’on effectue la contraction , on trouve
Ou
On contracte à nouveau sur , ce qui donne :
Et donc :
Comme
, on a finalement :
(
)
Nous avons donc un tenseur candidat respectant la règle 3 :
Avec
On peut aussi écrire :
Il respecte évidemment les conditions 1 et 2. La condition 5 est assez immédiate. Et on vérifie sans trop de difficulté la condition 4. L’équation d’Einstein est ainsi :

Comme en général le tenseur énergie-impulsion est connu mais pas la géométrie de l’espace-temps que l’on recherche, l’équation suivante est plus commode. En contractant l’équation précédente avec le tenseur métrique, on obtient :
En remplaçant la courbure scalaire ainsi trouvée dans l’équation d’Einstein, on trouve :
(
)
Dans le vide, le tenseur énergie-impulsion est nul, ce qui implique que . Cela ne fixe pas
entièrement le tenseur de courbure de Riemann-Christoffel, il faut pour cela tenir compte des conditions aux limites et des zones où la matière st présente. Notons que pour un espace à trois dimensions, l’annulation du tenseur de Ricci entraine aussi l’annulation du tenseur de courbure de Riemann-Christoffel. Ce qui signifie que l’absence de matière dans le vide y entraine l’absence de gravitation. Lorsque Riemann tenta de voir ce que donnerait une physique basée sur un espace courbe (sans le temps) il ne pouvait aboutir à une théorie de la gravitation. Il fallait pour cela inclure le temps dans la variété espace-temps courbe à quatre dimensions (et aussi localement une métrique de Minkowski). Ce que comprit Einstein.
VIII. Solutions à symétrie sphérique
VIII.1. Métrique statique à symétrie sphérique Considérons un champ gravitationnel statique à symétrie sphérique. Dans ce cas, la métrique ne dépend pas du temps et ses coefficients ne sont liés au vecteur position x et dx que par des combinaisons invariantes par rotation, c’est-à-dire , ou .
Intervalle Ecrivons ainsi l’intervalle ou le temps propre comme :
Avec √ Comme on a une symétrie sphérique, il est naturel de passer aux coordonnées sphériques : Le temps propre devient :
Afin d’éliminer les termes non diagonaux, on effectue un changement de coordonnées : On change le nom des fonctions de r. Et après un peu de travail on obtient :
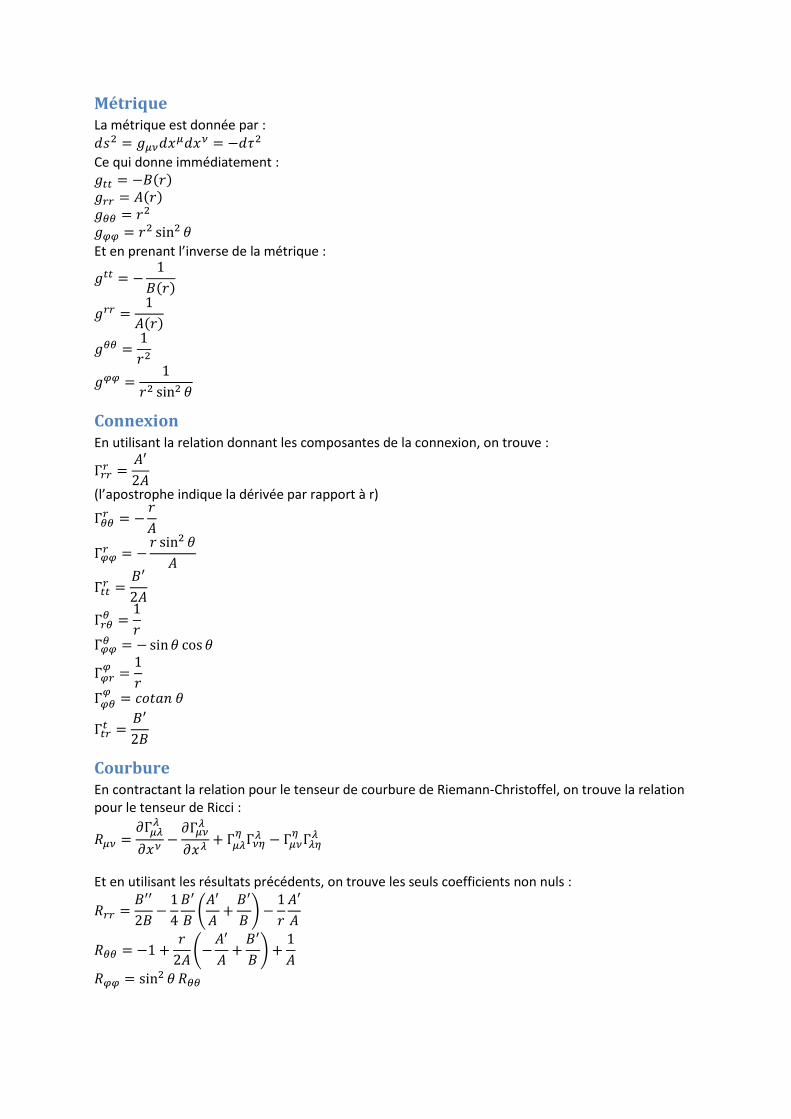
Métrique La métrique est donnée par :
Ce qui donne immédiatement :
Et en prenant l’inverse de la métrique :
Connexion En utilisant la relation donnant les composantes de la connexion, on trouve :
(l’apostrophe indique la dérivée par rapport à r)
Courbure En contractant la relation pour le tenseur de courbure de Riemann-Christoffel, on trouve la relation pour le tenseur de Ricci :
Et en utilisant les résultats précédents, on trouve les seuls coefficients non nuls :
(
)
(
)
(
)
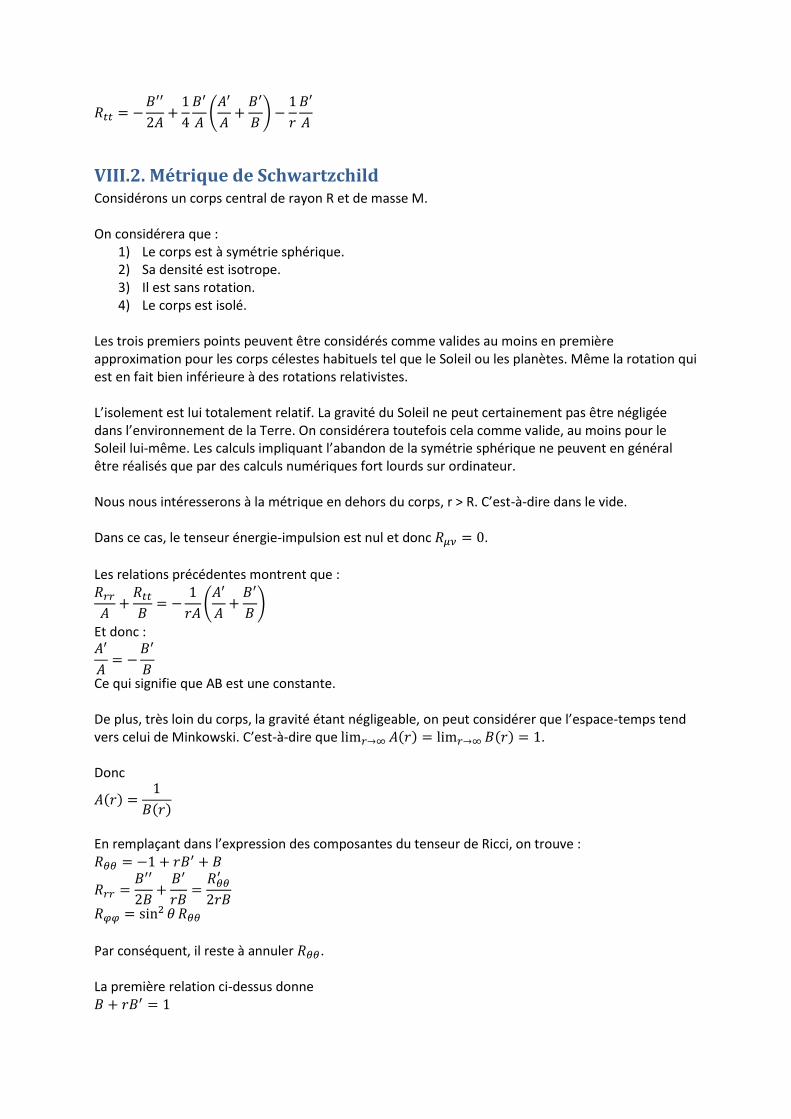
VIII.2. Métrique de Schwartzchild Considérons un corps central de rayon R et de masse M. On considérera que :
1) Le corps est à symétrie sphérique. 2) Sa densité est isotrope. 3) Il est sans rotation. 4) Le corps est isolé.
Les trois premiers points peuvent être considérés comme valides au moins en première approximation pour les corps célestes habituels tel que le Soleil ou les planètes. Même la rotation qui est en fait bien inférieure à des rotations relativistes. L’isolement est lui totalement relatif. La gravité du Soleil ne peut certainement pas être négligée dans l’environnement de la Terre. On considérera toutefois cela comme valide, au moins pour le Soleil lui-même. Les calculs impliquant l’abandon de la symétrie sphérique ne peuvent en général être réalisés que par des calculs numériques fort lourds sur ordinateur. Nous nous intéresserons à la métrique en dehors du corps, r > R. C’est-à-dire dans le vide. Dans ce cas, le tenseur énergie-impulsion est nul et donc .
Les relations précédentes montrent que :
(
)
Et donc :
Ce qui signifie que AB est une constante. De plus, très loin du corps, la gravité étant négligeable, on peut considérer que l’espace-temps tend vers celui de Minkowski. C’est-à-dire que . Donc
En remplaçant dans l’expression des composantes du tenseur de Ricci, on trouve :
Par conséquent, il reste à annuler . La première relation ci-dessus donne
C’est-à-dire
Et donc Ou
Où C est une constante à déterminer. Loin du corps massif, là où la gravité est très faible, la gravité newtonienne constitue une bonne approximation. On a donc Où le potentiel gravitationnel est donné par
On introduit une grandeur appelée rayon gravitationnel ou rayon de Schwartzchild, également
appelé horizon des Schwartzchild ou horizon des événements pour des raisons que nous verrons. On l’appelle aussi rayon du trou noir.
On a donc enfin nos fonctions :
(
)
Le temps propre devient :
(
) (
)
La métrique correspondante s’appelle métrique de Schwartzchild. Plus haut nous avons supposé que r > R. On voit que la métrique présente une singularité pour . Pour des corps tels que le Soleil ou la Terre ou l’espace-temps est manifestement très peu courbé,
une métrique singulière est gênante. Il faut donc avoir, pour des corps ordinaires, .
Pour cette raison il est intéressant de calculer le rayon gravitationnel du Soleil et de la Terre. Le Soleil ayant un rayon de 700000 km et une masse de kg, le rayon de Schwartchild vaut 3 km. Et pour la Terre on trouve 8.8 mm. La condition est donc très largement respectée.
VIII.3. Déplacement du périhélie Si dans un système de coordonnées donné la métrique ne dépend pas d’une coordonnée , alors pour une géodésique du genre temps la composante de la vitesse est constante. En effet, considérons l’équation des géodésiques sous la forme :
On obtient en développant :

En remplaçant la connexion par son expression en fonction de la métrique :
(
)
Or (changement des indices muets) :
Donc
Le dernier facteur est nul par hypothèse est donc . Considérons un corps de masse m en rotation autour d’une étoile sur une orbite quasi circulaire dans le plan équatorial dans un espace-temps décrit par la métrique de Schwartzchild. La métrique est donnée par
(
) (
)
La métrique est donc indépendante de t et de et donc et sont constants. Soit, en utilisant la
définition de la composante temporelle du quadrivecteur vitesse :
(
)
Car (on pose c = 1 par facilité, le remettre plus loin ne pose pas de problème) Pour l’autre composante, on choisit une autre constante :
Les constantes E et J correspondent à l’énergie et le moment angulaire du corps.
En utilisant la norme du quadrivecteur vitesse et (puisque est constant), on a :
( )
(
)
(
)
(
)
En réarrangeant les termes, on a trouve enfin
(
)
(
)
(
)
Remplaçons par
On a ainsi :

(
)
(
)
(
)
Pour résoudre cette équation, posons u = 1/r.
( ) (
)
( )
Soit
(
)
En remplaçant le rayon gravitationnel par 2GM et en différentiant par rapport à , on obtient l’équation classique de Kepler corrigée d’un terme en :
Pour trouver une solution approchée, partons de l’équation classique :
Dont la solution est
Qui montre que la trajectoire est une conique d’excentricité e, de paramètre et dont le grand axe fait un angle avec l’axe polaire. Le terme supplémentaire (en remettant la valeur de c) est très petit devant l’unité. Pour obtenir une bonne approximation de la solution à notre équation, on peut donc le remplacer en utilisant la solution classique.
Pour une orbite quasi circulaire, le dernier terme peut être négligé (e proche de zéro). A nouveau en négligeant devant l’unité, il reste l’équation :
La solution générale de cette équation peut s’écrire :
( (
))
Sur une orbite complète, on a donc un décalage de l’angle égal à :
Le paramètre de l’ellipse est
Et donc il reste :
On observe donc un décalage progressif de l’ellipse à chaque orbite, c’est le déplacement du périhélie. On peut calculer le résultat pour différentes planètes et le comparer au résultat mesuré. Le résultat mesuré tient compte du décalage dû aux perturbations mutuelles entre planètes. Les valeurs ci-dessous sont données en secondes d’arc par siècle.
Valeur calculée Valeur mesurée
Mercure 43.03 Vénus 8.6 Terre 3.8
On constate ainsi le bon accord entre calcul et mesure. Historiquement, ce fut le premier succès de la relativité générale. Le déplacement du périhélie de Mercure était connu de longue date mais inexplicable. Les tentatives précédentes d’expliquer cette déviation par la présence d’une planète inconnue proche du Soleil (appelée Vulcain) ayant échoué (aucune planète n’étant observable à la position calculée).
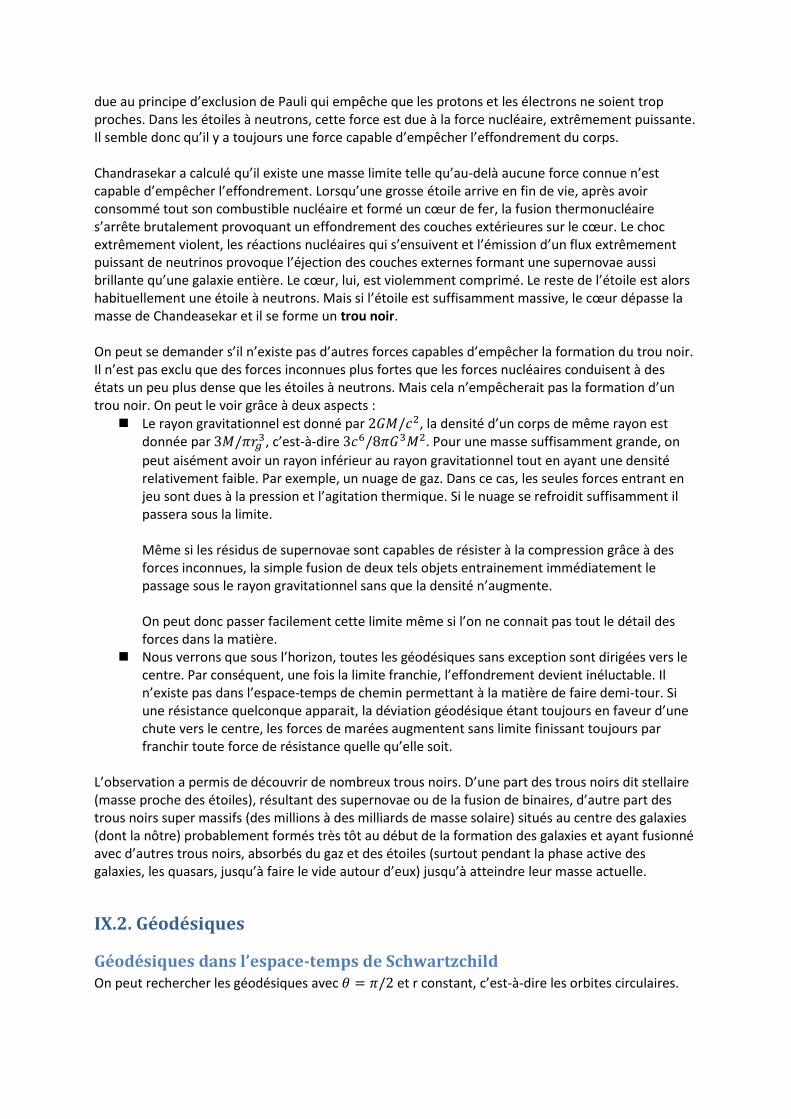
VIII.4. Déviation des rayons lumineux On peut calculer la déviation des rayons lumineux frôlant le Soleil de masse M et de rayon R en physique classique en utilisant les lois de Kepler si on considère que les rayons lumineux sont constitués de « corpuscules de lumière » de masse m petite mais non nulle. Dans ce cas, leur moment cinétique J est tel que :
Le rayon vecteur s’écrit suivant les lois de Kepler :
La trajectoire tend vers une asymptote lorsque , c’est-à-dire
. On a donc dans ce cas

Cela donne la relation pour la déviation :
La trajectoire au plus près du Soleil est et . Donc :
C’est-à-dire :
On obtient donc la valeur approchée de la déviation des rayons lumineux :
La déviation prédite par la mécanique classique est donc :
Effectuons le calcul en relativité générale. Pour la lumière, on a des géodésiques nulles, c’est-à-dire . Les calculs précédents sur les orbites montraient que :
Cela signifie que si tend vers zéro, alors j tend vers l’infini. L’équation des orbites se réduit alors à
Le terme de droite est très petit. Une première solution approchée est donc donnée par
La solution est
C’est l’équation d’une droite : En portant cette solution approchée dans le terme de droite de l’équation initiale, on a
La solution de cette équation est :
On prend à nouveau le cas , et
.
La solution ci-dessus pour u = 0 donne

(
)
L’angle étant petit, on peut utiliser la solution approchée
Cela conduit finalement à la déviation :
La valeur prédite est le double de la valeur classique. Pour le Soleil, le calcul donne : La mesure de la déviation lors d’une éclipse solaire en 1919 obtenue en mesurant la position précise d’étoiles proches du disque solaire donna une valeur comprise entre 1.57 et 2.37 secondes d’arc, confirmant la prédiction de la relativité générale. Notons que cette déviation implique aussi que les rayons lumineux venant d’étoiles lointaines peuvent être déviés par des masses importantes (galaxies, amas) situées sur la ligne de visée. La déviation sera différente selon que le rayon lumineux passe d’un côté ou de l’autre de la masse donnant lieu a des images multiples appelées mirages gravitationnels ou effet de lentille gravitationnel. Ces images ont été confirmées en 1981. Elles constituent aussi un moyen efficace pour déterminer la distribution de masse de l’objet déviant. Lorsque la masse déviant les rayons lumineux est plus petite (étoile, trou noir, planète), on parle de microlentille et cela se traduit par une amplification de la luminosité des objets d’arrière-plan car la déviation concentre les rayons lumineux. Cet effet peut être utile pour déterminer la présence d’objet peu visible comme des trous noirs ou des planètes extrasolaires et déterminer leur masse.
Exercices
1. ✰ Quelles sont les différences de comportement entre une lentille traditionnelle en verre et une lentille gravitationnelle ?
IX. Les trous noirs
IX.1. Formation des trous noirs Nous avons vu que dans les cas des corps céleste habituels, étoiles, planètes, . Mais que se
passe-t-il si ?
Dans ce cas nous aurons à traité avec la singularité présente dans la métrique. Mais tout d’abord, est-ce qu’un tel corps peut exister ? La réponse est oui, il suffit pour cela que la masse M centrale soit suffisante. Lorsque les corps sont à l’équilibre, leur poids est compensé par diverses forces. Pour les planètes, la force est donnée par la cohésion de la matière. Dans les naines blanches, très compactes, la force est
due au principe d’exclusion de Pauli qui empêche que les protons et les électrons ne soient trop proches. Dans les étoiles à neutrons, cette force est due à la force nucléaire, extrêmement puissante. Il semble donc qu’il y a toujours une force capable d’empêcher l’effondrement du corps. Chandrasekar a calculé qu’il existe une masse limite telle qu’au-delà aucune force connue n’est capable d’empêcher l’effondrement. Lorsqu’une grosse étoile arrive en fin de vie, après avoir consommé tout son combustible nucléaire et formé un cœur de fer, la fusion thermonucléaire s’arrête brutalement provoquant un effondrement des couches extérieures sur le cœur. Le choc extrêmement violent, les réactions nucléaires qui s’ensuivent et l’émission d’un flux extrêmement puissant de neutrinos provoque l’éjection des couches externes formant une supernovae aussi brillante qu’une galaxie entière. Le cœur, lui, est violemment comprimé. Le reste de l’étoile est alors habituellement une étoile à neutrons. Mais si l’étoile est suffisamment massive, le cœur dépasse la masse de Chandeasekar et il se forme un trou noir. On peut se demander s’il n’existe pas d’autres forces capables d’empêcher la formation du trou noir. Il n’est pas exclu que des forces inconnues plus fortes que les forces nucléaires conduisent à des états un peu plus dense que les étoiles à neutrons. Mais cela n’empêcherait pas la formation d’un trou noir. On peut le voir grâce à deux aspects :
Le rayon gravitationnel est donné par , la densité d’un corps de même rayon est donnée par
, c’est-à-dire . Pour une masse suffisamment grande, on
peut aisément avoir un rayon inférieur au rayon gravitationnel tout en ayant une densité relativement faible. Par exemple, un nuage de gaz. Dans ce cas, les seules forces entrant en jeu sont dues à la pression et l’agitation thermique. Si le nuage se refroidit suffisamment il passera sous la limite. Même si les résidus de supernovae sont capables de résister à la compression grâce à des forces inconnues, la simple fusion de deux tels objets entrainement immédiatement le passage sous le rayon gravitationnel sans que la densité n’augmente. On peut donc passer facilement cette limite même si l’on ne connait pas tout le détail des forces dans la matière.
Nous verrons que sous l’horizon, toutes les géodésiques sans exception sont dirigées vers le centre. Par conséquent, une fois la limite franchie, l’effondrement devient inéluctable. Il n’existe pas dans l’espace-temps de chemin permettant à la matière de faire demi-tour. Si une résistance quelconque apparait, la déviation géodésique étant toujours en faveur d’une chute vers le centre, les forces de marées augmentent sans limite finissant toujours par franchir toute force de résistance quelle qu’elle soit.
L’observation a permis de découvrir de nombreux trous noirs. D’une part des trous noirs dit stellaire (masse proche des étoiles), résultant des supernovae ou de la fusion de binaires, d’autre part des trous noirs super massifs (des millions à des milliards de masse solaire) situés au centre des galaxies (dont la nôtre) probablement formés très tôt au début de la formation des galaxies et ayant fusionné avec d’autres trous noirs, absorbés du gaz et des étoiles (surtout pendant la phase active des galaxies, les quasars, jusqu’à faire le vide autour d’eux) jusqu’à atteindre leur masse actuelle.
IX.2. Géodésiques
Géodésiques dans l’espace-temps de Schwartzchild On peut rechercher les géodésiques avec et r constant, c’est-à-dire les orbites circulaires.

Partons pour cela de l’équation
C’est-à-dire
Pour , on a :
Pour la métrique de Schwartzchild, on a :
(
)
(
)
(
)
En développant l’équation des géodésiques ci-dessus, on a :
Si r et sont constants, alors . Il reste donc
(
) (
)
Pour , , donc
(
)
Le rapport des composantes de la quantité de mouvement sont donnés par :
On trouve ainsi finalement :
√
On pose
et ainsi .
Pour connaitre le type de géodésique, il faut calculer la norme du quadrivecteur impulsion :
Comme (
) et , on trouve :
(
)
(
) (
)
On a trois possibilités :
1) Si , alors . C’est une géodésique de type temps qui est une orbite
circulaire possible pour un corps de masse m. 2) , alors . C’est une géodésique de type lumière. C’est une orbite possible
pour un rayon lumineux (notons que cette orbite est instable). 3) , lors . C’est une géodésique de type espace donc impossible pour une
orbite. Notons d’ailleurs que dans ce cas est imaginaire. Cela veut dire qu’un dessous d’une certaine distance il n’y a plus d’orbite possible, la chute est inéluctable. Cela ne signifie pas que cette zone est impossible à atteindre. En particulier avec des trajectoires non géodésiques (fusée stationnaire maintenue à r constant avec des réacteurs par exemple), au moins au-dessus de l’horizon.
Conséquences Imaginons un tube circulaire placé autour d’un trou noir. Dans le premier cas ci-dessus, la situation semble normale. Un observateur placé dans le tube voit celui-ci s’incurver en direction du trou noir. Dans le deuxième cas, le tube suit les orbites des rayons lumineux. Par conséquent, un observateur placé dans le tube verrait un tunnel rectiligne. C’est un effet d’optique analogue à des jeux de miroirs. S’il regarde suffisamment loin dans le tube, il verrait son propre dos. Dans le troisième cas, l’observateur verrait a contrario le tube s’incurver dans le sens opposé, en s’éloignant du trou noir, donnant ainsi l’impression trompeuse que le trou noir est de l’autre côté du tube. C’est un effet d’optique mais c’est aussi une conséquence de la courbure de l’espace-temps autour du trou noir puisque les géodésiques lumières suivent cette courbure. Ainsi, toute mesure effectuée localement dans le tube confirmerait ce résultat étrange. Cela conduit à des résultats étranges. Supposons que l’observateur est en déplacement dans le tube pour faire le tour du trou noir. Bien entendu, cette trajectoire n’est pas nécessairement géodésique, en particulier sous la limite puisqu’aucune orbite n’y est possible.
Dans le cas 1, le voyageur subit une force centrifuge qui tend à l’éloigner du trou noir. Les cas 2 et 3 sont plus étranges. En effet, en vertu du principe d’équivalence, localement, le voyageur ne doit pas pouvoir distinguer l’effet d’une accélération de la gravité. Pour lui, son environnement immédiat n’est pas nécessairement la conséquence de la gravité et localement les lois de la mécanique de la relativité restreinte doivent s’appliquer. Elles doivent aussi être en accord avec la courbure observée sous peine d’avoir un moyen de distinguer l’origine de cette courbure. Par conséquent dans le tube « rectiligne », le voyageur ne subit aucune force centrifuge. Et dans le troisième cas, en vertu du principe d’équivalence, il subit une force centrifuge le poussant vers l’extérieur de la courbure du tube c’est-à-dire vers le trou noir ! Cela montre que passé l’orbite lumière, être en rotation n’aide pas à se maintenir en orbite, que du contraire. C’est d’ailleurs compatible avec l’affirmation qu’aucune orbite n’est possible à cet endroit sinon il suffirait de tourner suffisamment vite (éventuellement à une vitesse proche de celle de la lumière) pour avoir une force centrifuge arbitrairement grande permettant de se maintenir en orbite.

Cela montre aussi que passé l’orbite lumière, il vaut mieux faire un « vol stationnaire » plutôt que de tenter une orbite forcée plus difficile puisque la force centrifuge vient s’ajouter à l’a force d’attraction du trou noir.
IX.3. Horizon
Nature de la singularité
La métrique de Schwartzchild contient deux singularités. La première est en r = 0. Cette singularité est réelle car toute quantité y devient infinie, du moins dans l’hypothèse où la matière serait infiniment concentrée au centre du trou noir. Les résultats montrent que l’effondrement est inévitable mais cela ne peut s’appliquer qu’en physique classique, non quantique. Il y a fort à parier que arrivé à une matière concentrée dans un très petit volume (de taille atomique) les effets quantiques rendent caduque les raisonnements de la relativité générale. En particulier le principe d’indétermination d’Heisenberg doit certainement conduire à une taille minimale très petite mais non nulle. Mais la métrique de Schwartzchild possède une autre singularité lorsque . Toutefois, cette
singularité n’a rien de physique et ne résulte que d’un choix malheureux des coordonnées. Pour le voir, considérons le cas d’un observateur tombant en chute libre dans le trou noir selon une direction
radiale. Dans ce cas et . La composante r de l’équation des géodésiques s’écrit :
C’est-à-dire :
En utilisant les valeurs de la connexion dans la métrique de Schwartzchild, cette relation devient :
[(
) (
)
]
Le terme entre crochets est égal à
On obtient ainsi finalement :
Cette équation, fort ressemblante à celle de Newton pour un corps en chute libre, ne comporte plus aucune singularité au rayon gravitationnel. L’observateur atteint l’horizon en un temps propre fini puis continue simplement sa chute. Ecrivons l’équation des géodésiques pour la composante temporelle :
Soit :
(
) (
)
(
)

On voit sur cette équation que t tend vers l’infini lorsque r s’approche du rayon gravitationnel. Pour un observateur lointain (dont le temps propre s’identifie à la coordonnée t dans cette région de Minkowski), l’observateur met donc un temps infini pour atteindre l’horizon. Notons finalement que l’observateur atteint le point r = 0 en un temps propre fini. Quelques calculs montrent qu’une fois passé l’horizon ce temps est de l’ordre de la milliseconde pour un trou noir stellaire et de l’ordre de l’heure pour un trou noir super massif. Considérons un observateur au repos dans la métrique de Schwartzchild. Dans ce cas, son temps propre est donné par :
(
)
Par conséquent, r ne peut pas être inférieur à . En dessous de ce rayon, un observateur n’est jamais
au repos, il tombe forcément vers le centre. Cela signifie que rien ne peut sortir du trou noir. C’est pourquoi la surface (de nature purement géométrique) sphérique de rayon est appelée horizon des événements ou horizon de
Schwartschild. On peut introduire un repère local orthonormé lié à l’observateur en posant :
(
)
(
)
On peut aussi calculer les composantes du tenseur de courbure dans ce repère. Nous donnons le résultat (nous enlevons les apostrophes pour plus de clarté) :
Comme ces composantes sont liées aux forces de marée, on voit que celles-ci deviennent vite très grande lorsque l’on s’approche du trou noir et encore plus de l’horizon. Là non plus on ne constate pas de singularité au rayon gravitationnel. Enfin, notons que le caractère singulier de la métrique de Schwartzchild est immédiatement visible. En effet, hors du trou noir la signature de la métrique est (-+++) mais sous l’horizon, la signature est (+-++). Cela implique que la signification des variables y est différente. t représente une coordonnée spatiale et r représente une coordonnée temporelle (avec un signe inversé).
Horizon des événements Etant donné la courbure extrême de l’espace-temps pour les trous noirs, beaucoup des effets qui leur sont liés sont totalement contre-intuitifs. Passons les en revue. Une des particularités de l’horizon est qu’il constitue une coupure causale dans l’espace-temps. Rien de ce qui se passe sous l’horizon ne peut influencer l’extérieur. Nous avons vu que le voyageur atteint l’horizon en un temps propre fini alors que pour un observateur extérieur ce temps est infini. Cela montre bien que le futur du voyageur (lorsqu’il sera sous l’horizon) est sans relation possible avec l’extérieur. Des raisonnements approximatifs comme « nous observons un trou noir, que se passe-t-il à ce moment à l’intérieur du trou noir » n’ont tout simplement pas de sens. Notons que le voyageur ne se rend pas compte de la traversée de l’horizon. Les équations ci-dessus montrent qu’il n’y a aucun effet spécial lors de ce passage. Le principe d’équivalence implique que localement l’observateur en chute libre est en apesanteur et la relativité restreinte s’applique. Aucune expérience locale ne permet de détecter le passage de l’horizon. Tout au plus peut-il constater l’augmentation des effets de marées (un effet qui n’est déjà plus tout à fait local puisqu’il faut une certaine étendue pour ressentir les forces de marée) mais avec une augmentation uniforme sans rupture au passage de l’horizon. Un autre effet lié à la rupture causale est le rapport calculé plus haut. Il est directement lié au décalage vers le rouge gravitationnel. On voit donc que la lumière émise près de l’horizon est très fortement décalée vers le rouge. Ce décalage devient infini sur l’horizon. De fait, le nom de « trou noir » est plutôt bien choisi :
Du fait de la rupture causale, le trou noir est vraiment un « trou ». Tout ce qui y rentre y reste.
La lumière émise par un corps s’approchant de l’horizon (et cela est vrai aussi d’une étoile en cours d’effondrement) disparait rapidement. On peut calculer le nombre de photons reçus à l’extérieur et pour un trou noir stellaire, lorsqu’un corps lumineux franchit ou lorsque
l’étoile en effondrement atteint cette taille, tous les photons sont reçus à l’extérieur en un temps inférieur à une fraction de seconde. Après, c’est le black out total.
Etant donné que rien ne sort du trou noir, il n’est pas rare d’entendre la question : « mais alors, à quoi est due la gravité extrême hors du trou noir ». La question est pertinente. On peut en donner une explication intuitive comme suit. Lorsqu’une étoile en effondrement atteint la taille , elle
produit une gravité parfaitement identique au trou noir qu’elle va devenir. Juste après, l’horizon se forme. A ce moment (et même avant en fait) la dilatation du temps gravitationnelle devient extrême et même infinie à l’horizon et le champ gravitationnel est comme « gelé ». On parle parfois de champ gravitationnel fossile. Une autre question parfois soulevée est : « si un observateur extérieur voir l’effondrement durer un temps infini (tout comme un voyageur met un temps infini pour atteindre l’horizon, le trou noir ne se forme jamais. Peut-on dire alors que les trous noirs n’existent pas ? ». Non. Les trous noirs existent. On peut s’en convaincre avec trois aspects :
Tout d’abord, comme signalé plus haut, un trou noir devient vite vraiment noir lors de sa formation et absolument aucune expérience lointaine ne permet de savoir ce qui se passe après.
Un observateur lointain n’a accès qu’à une partie de l’espace-temps du fait de la rupture causale. Il ne faut pas pour autant en conclure que le reste n’existe pas.
Si un voyageur plonge vers le trou noir, un observateur extérieur va constater qu’il ralentit de plus en plus sans jamais franchir l’horizon (du moins tant qu’il reçoit encore un peu de lumière venant de ce voyageur). Il peut donc penser pouvoir le sauver n’importe quand. Il lui suffit de plonger très vite vers le trou noir, rattraper le voyageur et le ramener. Ce qui est possible puisqu’il n’a pas encore franchit l’horizon. Mais c’est faux ! En effet, passé une certaine limite, en plongeant vers le trou noir on va diminuer l’effet de la dilatation du temps et le voyageur semble se remettre en route. Au final, on le rattrape… sous l’horizon ! Raté. Plus loin nous verrons des diagrammes permettant de visualiser plus facilement ce genre de scénario.
Une autre question parfois soulevée est : « si un voyageur franchit l’horizon, il peut alors lancer un rayon lumineux vers l’arrière. Le rayon ayant une vitesse invariante c, celui-ci ne devrait-il pas sortir du trou noir ? » La réponse est non. Le rayon a une vitesse invariante c par rapport au voyageur, donc dans son repère qui est en chute libre. Par ailleurs, tout raisonnement « extérieur », d’un observateur hors du trou noir qui dirait « le rayon part d’un point vers l’arrière et donc… » serait sans aucun sens, rappelons-nous la rupture causale. Ce que nous pouvons faire de mieux est raisonner en terme de coordonnées et de géodésiques et le calcul montre alors que le rayon lumineux continue son chemin vers le centre du trou noir (en suivant la coordonnée temporelle r). Le rayon va simplement aller « moins vite » que le voyageur (ce « moins vite » est à prendre avec un grain de sel car c’est les trajectoires coordonnées qui ne représentent pas nécessairement des valeurs que l’on obtiendrait avec des étalons d’ailleurs difficiles à placer sous l’horizon puisque tout y est forcément en train de plonger vers le centre. Toute mesure locale de la vitesse du rayon donnerait toujours c).
Exercices
1. ✰ Donnez des exemples de coordonnées sphériques (cartographie terrestre). Quels sont les singularités de ces coordonnées ?
IX.4. Coordonnées La géométrie de Schwartzchild étant totalement non intuitive, il peut être utile de disposer d’autres coordonnées et de diagrammes. Chaque système de coordonnées est utile car il peut mettre en évidence certaines particularités de la géométrie. En particulier les systèmes de coordonnées n’ayant pas de comportement pathologiques sur l’horizon.
Coordonnées de Novikov Un tel système de coordonnées fut introduit par Novikov. En se basant sur la trajectoire de particules tests, il attacha les coordonnées et au particules pour aboutir à la métrique plutôt compliquée suivante. La coordonnée est reliée à une hauteur atteinte par les particules tests comme :
(
)
(on pose c et G égal à 1). Et :

(
)(
)
Ici r n’est pas une coordonnée mais une fonction donnée implicitement par
[
] [(
)
]
Coordonnées de Eddington-Finkelstein Ces coordonnées sont un peu lourdes. Essayons autre chose. Eddington et Finkelstein ont considéré des photons en chute libre dans le trou noir. Ils utilisent pour
cela les coordonnées et qui indicent respectivement les géodésiques radiales nulles sortantes et entrantes. Les géodésiques sont données par
(
) (
)
Les géodésiques sortantes sont données par constant avec
Et les géodésiques entrantes par constant avec
Où est la « coordonnée tortue » définie par
(
)
Coordonnées entrantes
La métrique devient :
(
)
Avec
Coordonnées sortantes
La métrique devient :
(
)
Ces systèmes de coordonnées se comportent mieux que celui de Schwartzchild puisque l’on n’a pas de singularité sur l’horizon. Toutefois une des composantes de la métrique s’y annule et le premier système convient pour les géodésiques entrantes seulement et l’autre pour les géodésiques sortantes.
Coordonnées de Kruskal-Szekeres On peut résoudre les dernières difficultés en combinant ce qu’il y a de mieux dans ces deux systèmes
de coordonnées. Pour cela on laisse tomber la coordonnée r et on utilise à la fois et . On a alors
Et l’intervalle devient :
(
)

Mais ce système reste pathologique sur le rayon gravitationnel.
Les surfaces et constants sont bien définies mais pas les manières de les indicer. Tout
changement , laissera les surfaces physiquement inchangées. On doit donc changer les coordonnées pour éliminer la singularité. Un changement correct est suggéré par la relation suivante :
(
) (
) (
) (
)
Le changement qui va éliminer la singularité est alors donné par
(
) (
)
(
) (
)
(
) (
)
(
) (
)
L’intervalle devient
(
)
r est une fonction des coordonnées :
(
) (
)
On définit les coordonnées de Kruskal-Szekeres en quittant les coordonnées nulles :
(
)
(
) (
)
(
)
(
) (
)
Et donc L’intervalle devient :
(
)
Diagramme de Kruskal-Szekeres On peut se servir de ces coordonnées pour tracer les trajectoires d’objets dans l’espace-temps.
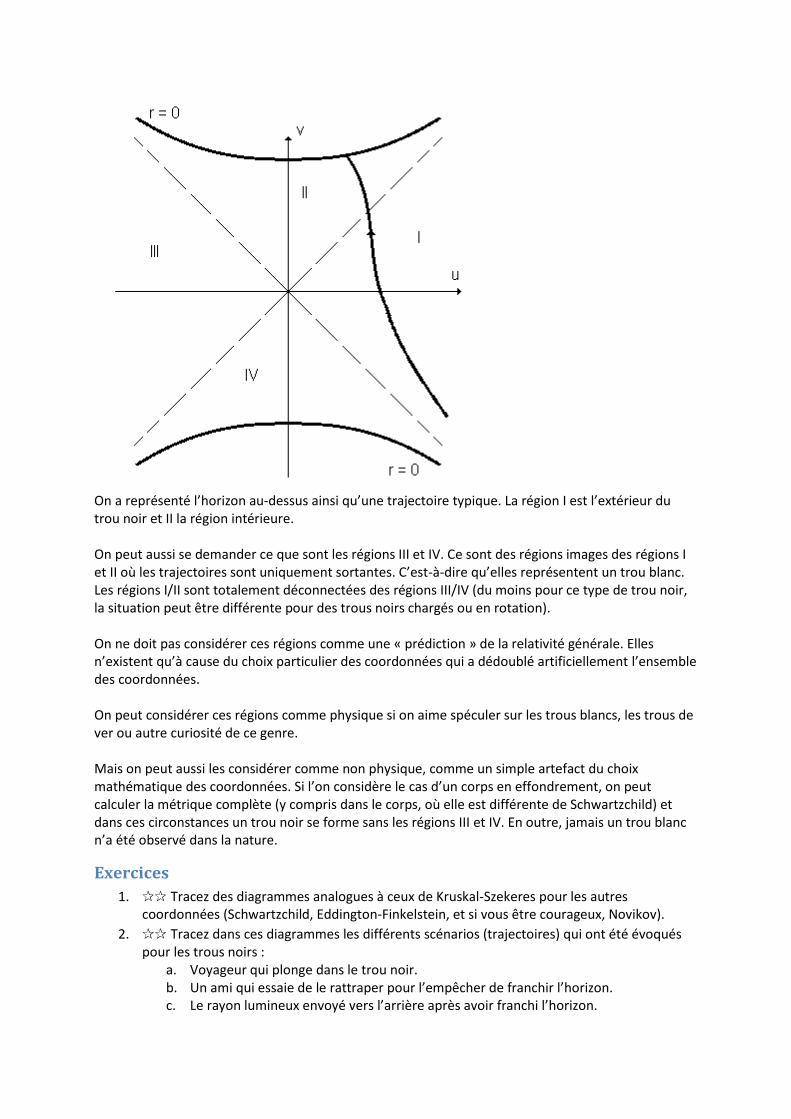
On a représenté l’horizon au-dessus ainsi qu’une trajectoire typique. La région I est l’extérieur du trou noir et II la région intérieure. On peut aussi se demander ce que sont les régions III et IV. Ce sont des régions images des régions I et II où les trajectoires sont uniquement sortantes. C’est-à-dire qu’elles représentent un trou blanc. Les régions I/II sont totalement déconnectées des régions III/IV (du moins pour ce type de trou noir, la situation peut être différente pour des trous noirs chargés ou en rotation). On ne doit pas considérer ces régions comme une « prédiction » de la relativité générale. Elles n’existent qu’à cause du choix particulier des coordonnées qui a dédoublé artificiellement l’ensemble des coordonnées. On peut considérer ces régions comme physique si on aime spéculer sur les trous blancs, les trous de ver ou autre curiosité de ce genre. Mais on peut aussi les considérer comme non physique, comme un simple artefact du choix mathématique des coordonnées. Si l’on considère le cas d’un corps en effondrement, on peut calculer la métrique complète (y compris dans le corps, où elle est différente de Schwartzchild) et dans ces circonstances un trou noir se forme sans les régions III et IV. En outre, jamais un trou blanc n’a été observé dans la nature.
Exercices
1. ✰✰ Tracez des diagrammes analogues à ceux de Kruskal-Szekeres pour les autres coordonnées (Schwartzchild, Eddington-Finkelstein, et si vous être courageux, Novikov).
2. ✰✰ Tracez dans ces diagrammes les différents scénarios (trajectoires) qui ont été évoqués pour les trous noirs :
a. Voyageur qui plonge dans le trou noir. b. Un ami qui essaie de le rattraper pour l’empêcher de franchir l’horizon. c. Le rayon lumineux envoyé vers l’arrière après avoir franchi l’horizon.

X. Les ondes gravitationnelles
X.1. Champ gravitationnel faible On considère que l’on est dans une région de champ gravitationnel faible et on va étudier les perturbations de ce champ (les solutions exactes peuvent être dérivées mais sont plus complexes). Dans ce cas, la métrique est proche de celle de Minkowski et on écrit :
Où le tenseur h est supposé très petit par rapport à l’unité. La connexion s’écrit :
(
)
(
)
La deuxième partie est en h² et peut donc être négligée. En portant la première partie dans le tenseur de Ricci, on trouve :
(
)
On obtient donc au premier ordre pour l’équation d’Einstein :
Avec
Le tenseur énergie-impulsion satisfait à la loi de conservation
Cette condition appliquée à S donne :
X.2. Transformation des coordonnées Considérons un changement des coordonnées :
Le tenseur métrique devient :
Rappelons que l’on a :
Et :
Par conséquent :
( )
(
)(
) ( )
Soit, au premier ordre :
En posant on obtient finalement
X.3. Condition d’harmonicité Si est solution de l’équation d’Einstein linéarisée au premier ordre, en utilisant l’expression du
tenseur de Ricci linéarisée, on trouve :
On voit facilement que
est aussi solution de cette équation. On doit donc fixer une condition de
jauge pour fixer de manière unique le tenseur . La jauge harmonique est fréquemment adoptée :
Après un calcul assez long et fastidieux dont nous vous dispensons ici, on obtient la condition de jauge :
Exercices
1. ✰✰✰ Effectuez ce calcul.
X.4. Ondes gravitationnelles Avec la condition de jauge, les équations se simplifient et il reste
Une solution particulière de l’équation harmonique est la solution retardée :
∫ (
| | )
| |
Cette solution décrit une onde gravitationnelle retardée de la forme (
) et donc de vitesse c.
Dans le vide les ondes gravitationnelles vérifient donc

X.5. Tenseur de polarisation
Ondes planes Introduisons un tenseur de polarisation symétrique .
On peut décrire une onde gravitationnelle comme une onde plane sortante et une onde plane entrante :
( )
( )
En prenant le d’alembertien de cette onde, on trouve :
Et la condition d’harmonicité donne :
Effectuons la transformation des coordonnées
Qui correspond à une transformation de jauge de la métrique. On choisi sous forme d’ondes planes :
( )
( )
La transformation des coordonnées devient :
(
) (
) ( )
( )
(
) (
)
Qu’on peut écrire :
( )
( )
Avec
Le tenseur polarisation symétrique ayant à six composantes indépendantes. Avec les quatre conditions ci-dessus, il reste donc deux tenseurs qui satisfont les conditions de symétrie, d’harmonicité et d’invariance de jauge. Prenons par exemple une onde se propageant vers les z positifs. On a : et La condition d’harmonicité donne les relations :
On en tirer quatre tenseurs linéairement indépendants, par exemple :
La transformation de jauge donne :
Donc seuls et sont invariants de jauge et ont une signification physique. Par rotation d’un angle dans le plan xy, les composantes du tenseur de polarisation se transforment suivant la transformation habituelle
Où est la matrice de rotation :
[
]
Introduisons deux combinaisons des composantes du tenseur polarisattion : En appliquant la transformation, on obtient :
Ce qui représente des composantes d’hélicité 2, 1 et scalaires. Mais comme seuls et ont une signification physique, la gravité est transmise par des ondes gravitationnelles d’hélicité 2 (par opposition à l’hélicité 1 des ondes électromagnétiques).
Détection Nous arrêterons ici, le sujet est extrêmement vaste (trop pour une introduction) : énergie des ondes gravitationnelles, émission, propagation, détection,… Signalons simplement quelques éléments quant à leur détection :
Les ondes gravitationnelles sont généralement assez faible et d’énergie très faible. Et leur effet sur la matière est encore plus faible. Leur détection est donc assez problématique. Par exemple, même des ondes assez intenses émises par exemple par la fusion de deux trous noirs voisins ne provoquerait dans une barre d’un mètre de long que des fluctuations de longueur inférieure à la taille d’un atome.
Les méthodes actuelles sont basées sur l’interférométrie. Des rayons lasers effectuent un très grand nombre d’aller-retour (ce qui accentue artificiellement la longueur) et interfèrent (ce qui permet une très grande sensibilité) dans des détecteurs de très grande taille stabilisés contre les vibrations parasites et les variations de pression ou de température. Malgré l’énorme raffinement de ces détecteurs, la sensibilité est tous juste suffisante et aucune détection n’a encore été mesurée. La solution viendra peut-être de détecteurs placés dans l’espace.
Même si une détection directe n’a pas encore pu être réalisée, leur détection indirecte ne fait aucun doute. Les pulsars sont des étoiles à neutrons tournant rapidement sur elles-mêmes (plusieurs milliers de tours par seconde) en émettant des impulsions radios (dû à leur puissant champ magnétique. La régularité de ces pulsars n’a d’égal que les horloges atomiques. Lorsque deux étoiles à neutrons sont en orbite l’une autour de l’autre (pulsars binaires) il y a émission d’ondes gravitationnelles. Cette émission emporte de l’énergie et du moment angulaire provoquant un rapprochement des étoiles à neutrons. Même si ce rapprochement reste très faible, la grande régularité d’émission des pulsars autorise la mesure. Les résultats dépendent d’une manière non triviale des paramètres orbitaux (masses, distance entre étoiles) et les résultats mesurés concordent parfaitement avec le calcul de l’effet dû à l’émission d’ondes gravitationnelles.
XI. La cosmologie
XI.1. Modèle standard Le Modèle Standard de la Cosmologie est le modèle le plus complet et le plus précis décrivant l’univers observable dans son ensemble et son évolution à partir de l’expansion d’un état dense et chaud. Il intègre :
L’ensemble (considérable) des données issues de l’observation et de l’expérience. Un grand nombre de théories (relativité générale, thermodynamique, physique nucléaire,
etc.) Un modèle descriptif paramétré s’adaptant au mieux aux observations.
Ce modèle est aussi plus communément appelé « théorie de big bang », bien que le terme « théorie » soit assez mal adapté. Ce nom de big bang fut donné par un opposant à cette théorie, par dérision (théorie du « grand boum »), sans se douter du succès populaire que cela aurait. Notons que le Modèle Standard ne parle pas de la naissance de l’univers. Il ne décrit pas « l’instant zéro », pour peu qu’il y ait un sens à parler d’un tel instant, car il échappe aussi bien à la théorie qu’à l’observation. Le Modèle Standard commence dans un état accessible à l’expérience et indirectement à l’observation. Nous allons décrire ici dans les très grand lignes le scénario général de cette évolution. Le sujet est extrêmement vaste et la cosmologie est une science en elle-même. Nous nous concentrerons ensuite sur les modèles issus de la relativité générale.
Données observées Parmi les données observées permettant la construction du modèle, voyons quelques aspects très important.
Principe cosmologique. L’univers est globalement homogène et isotrope. Bien entendu, cela est faux à petite échelle, sinon nous ne serions pas là. Même à l’échelle d’un amas de galaxies, l’homogénéité n’est pas frappante.
Par contre, si l’on prend de grandes échelles (se chiffrant en centaine de millions de parsecs), on constate une très bonne homogénéité. Quelle que soit la (grande) portion de l’univers qui est prise on trouve un nombre à peu près identique de galaxies et d’amas. A très grande échelle cette homogénéité et cette isotropie est même tout à fait remarquable. Actuellement, l’étude des écarts à cette homogénéité (« petites » hétérogénéités, fluctuations) a pris une grande importance. Leur étude est toutefois extrêmement difficile car elle nécessite des modèles très élaborés et des calculs très complexes faisant appel aux statistiques et à de très lourds calculs numériques. Par conséquent, en première approximation, on considère l’univers parfaitement homogène et isotrope (comme s’il était constitué d’un « gaz » uniforme de galaxies). C’est ce que nous ferons ici.
Loi de Hubble. On constate que les galaxies s’éloignent les unes des autres. La vitesse d’éloignement est donnée par où D est la distance entre les galaxies et H est une constante appelée constante de Hubble. Nous ne décrirons pas ici les méthodes de mesure des distances (parallaxe, chandelles standards). Notons que cette loi linéaire est en accord avec le principe cosmologique. Un univers homogène où aucun point n’est privilégié implique que chaque observateur, où qu’il soit, constate une même loi d’expansion des galaxies. Cela est équivalent à dire que cette loi est linéaire, ce qu’on vérifie facilement. On observe toutefois des écarts à cette loi.
o Pour les galaxies proches, la loi n’est pas du tout respectée. Andromède, notre plus proche voisine, se dirige même vers notre galaxie, la Voie Lactée. Ceci est dû aux forces gravitationnelles. Lors de leur formation, ces galaxies s’attirant mutuellement ont formé des amas et des superamas de galaxies liés par la gravitation et échappant donc à cette expansion de l’univers. Aux grandes distances, la vitesse d’expansion devient très grande et surpasse les « mouvements locaux ».
o A très grande distance, il y a un léger écart. Observer loin c’est en effet observer l’univers tel qu’il était il y a longtemps. Si on observe une galaxie située à cinq milliards d’année-lumière, on la voit telle qu’elle était il y a cinq milliards d’années (le temps mis par la lumière pour arriver jusqu’à nous). La règle d’homogénéité et de linéarité s’applique à l’univers à une époque donnée. La constante de Hubble peut et a évolué au cours du temps.
o On constate aussi une curieuse accélération de l’expansion, phénomène encore très mal compris et que nous n’aborderons pas du tout ici.
Décalage vers le rouge cosmologique. Plus les objets sont lointains et plus leur rayonnement est décalé vers le rouge.
Evolution de l’univers. Comme nous l’avons dit, voir loin, c’est voir il y a longtemps. Observer les galaxies lointaines c’est donc les observer dans leur jeune âge. Ces observations permettent donc d’observer, selon la distance, comment les populations de galaxies ont évolués au cours du temps. Par exemple, les quasars, ou galaxies actives, sont des galaxies
dont le trou noir central avale une très grande quantité de matière. Se faisant le disque d’accrétion de ces trous noirs et leurs jets provoque une émission lumineuse colossale, faisant de ces objets des galaxies faciles à observer malgré leur distance Ces galaxies actives ont en effet surtout été présente pendant une certaine période de l’univers : après la formation des galaxies et des trous noirs mais avant que ces trous noirs n’aient avalés tout ce qui les entourait.
Abondance des éléments chimiques. On peut observer les étoiles, les nuages de gaz, et mesurer par spectroscopie l’abondance des différents éléments chimiques. Les atomes lourds sont formés dans les fournaises stellaires et les supernovæ. On observe donc des nuages de gaz peu contaminés par ces éléments ce qui donne des informations sur la « composition primordiale » de l’univers, celle ayant existé avant la formation des étoiles. On y trouve surtout de l’hydrogène et de l’hélium et un peu de deutérium, de lithium et des traces de quelques autres éléments légers.
Rayonnement fossile. On observe un rayonnement d’ondes radios, uniforme et isotrope (au millième près) qui semble baigner tout l’univers. Ce rayonnement est très proche de celui qu’émettrait un corps noir à 3 K. L’étude de ses légères fluctuations a pris une importance considérable ces derniers temps grâce aux observations de missions WMAP et Planck.
Univers observable. Ce que nous observons est l’univers observable, évidemment ! L’âge des plus vieux objets de l’univers, l’évolution stellaire, les modèles,… Tout concorde pour donner à l’univers un âge de 13.6 milliards d’années. Il est donc impossible de voir plus loin que 13.6 milliards d’année-lumière car la lumière n’a pas encore eut le temps de nous parvenir. Toute hypothèse sur le reste de l’univers est forcément spéculative. En particulier nous ignorons si le principe cosmologique s’applique au-delà. On peut juste supposer que cela est le cas au moins jusqu’à une certaine distance au-delà de cet horizon cosmologique. Il serait vraiment étonnant qu’il s’applique exactement sur une distance égale à celle que nous pouvons observer à notre époque et pas au-delà. Les physiciens n’aiment pas les coïncidences. Comme nous ne pouvons pas vérifier toute hypothèse concernant des parties de l’univers non observables, autant prendre le modèle le plus simple et considérer que l’univers complet est entièrement homogène et isotrope. On vérifie alors que ce qui est obtenu fonctionne correctement. Quitte ensuite à essayer des modèles plus compliqués, soit pour essayer de résoudre certains problèmes ou pour voir si des observations dans la partie observable permettraient de les distinguer. Nous admettrons ici le principe cosmologique « étendu » à tout l’univers.
Modèle dévolution Décrivons le scénario du Modèle Standard qualitativement en quelques lignes. Puisque l’univers est en expansion, cela signifie que par le passé les galaxies étaient plus proches. En remontant encore plus loin, on fit par arriver à un état extrêmement dense et chaud. Nous partirons de ce point et nous décrirons les principaux événements qui en résultent.
Nucléosynthèse
Au départ, on a un gaz formés de particules élémentaires : quarks, photons, électrons, muons, neutrinos, etc. ainsi que leurs antiparticules. A cause de la température très élevée, ce gaz appelé « soupe de quarks » est en équilibre. Autant de particules se créent dans des collisions que de particules s’annihilent. On montre d’ailleurs que malgré l’expansion rapide, ce gaz reste en permanence quasiment en équilibre thermique. Avec l’expansion, le gaz se refroidit. Les premières particules à s’échapper sont les neutrinos. Particules interagissant fort peu avec la matière. A partir de là ils se déplacent librement dans le gaz. Puis l’énergie thermique devient insuffisante pour créer de nouvelles particules et matière et antimatière commence à s’annihiler. On compte un milliard d’antiparticules pour un milliard + une particule (cet écart infime s’explique encore assez mal). On a donc au final un milliard de photons (résultant des annihilations) pour une particule de matière (quark, leptons). Les quarks s’associent ensuite pour former des nucléons. On a en quantité à peu près égale autant de protons que de neutrons. Mais les neutrons ont une durée de vie limitée. Ils se désintègrent en protons avec une demi-vie d’environ vingt minutes. Leur nombre commence à baisser. Les chocs entre nucléons, photons et électrons sont encore trop fort pour permettre la formation de noyaux. Mais dès que l’expansion a suffisamment refroidit le gaz primordial, les nucléons peuvent s’associer pour former environ un quart de noyaux d’hélium (deux protons et deux neutrons) et trois quart d’hydrogène (un proton seul). Les neutrons sont alors stabilisés dans les noyaux. Le stade auquel cela se produit dépend de manière cruciale du nombre de photons qui interagissent avec les nucléons et empêchent initialement leur liaison. C’est ce qui a permis d’estimer le nombre de un milliard de photons par particule. Les calculs et expériences de physique nucléaire permettent par ailleurs de calculer les proportions exacte qui résultent de cette nucléosynthèse primordiale : hydrogène, hélium 3, hélium 4, deutérium, lithium, etc. Les proportions trouvées sont en très bon accord avec les observations. Trois minutes se sont écoulées depuis le départ.
Formation des atomes
Le gaz est encore trop chaud pour que les électrons se lient aux noyaux. Les noyaux positifs et les électrons négatifs libres interagissent fortement avec les photons : l’univers est opaque. Il faut attendre trois cent mille ans pour que la température soit suffisamment basse (environ trois mille degrés) pour que les électrons se lient aux atomes. La neutralisation des atomes et la densité plus faible libère alors les photons qui vont pouvoir se déplacer librement dans l’univers indépendamment du contenu en matière. Le gaz de matière et le « gaz » de photons évoluent indépendamment. Ce rayonnement électromagnétique thermique très chaud qui baigne l’univers va subir un décalage vers le rouge important avec l’expansion. On calcule qe la « dilution » résultant de l’expansion se combine avec le décalage pour garder au rayonnement sa forme de rayonnement thermique. Il constitue le rayonnement fossile que nous captons actuellement.
Formations des étoiles
Le gaz primordial n’est pas strictement homogène mais contient des fluctuations (assez bien comprises, elles présentent un spectre en puissance tout à fait caractéristique). Ces légères fluctuations se retrouvent d’ailleurs dans le rayonnement fossile.
Lorsque la température a suffisamment baissé, les zones un peu plus denses vont commencer à s’effondrer sous leur propre poids. Les premières étoiles commencent à se former. Le gaz initial étant très pauvre en atomes lourds, on calcule que les premières étoiles devaient être de très grande taille. Cela leur donnait une vie très courte et elles devenaient rapidement des supernovæ. Cela a eu trois conséquences : un rapide enrichissement en atomes lourds, une réionisation des nuages de gaz (par le rayonnement ultraviolet puissant des jeunes étoiles et le rayonnement des supernovæ), et la formation des premiers trous noirs qui vont servir de graine à la formation des premières galaxies. Petit à petit, l’univers va ainsi se structurer. Les premières petites galaxies vont fusionner pour former de plus grosses galaxies, se rassembler en amas et superamas jusqu’à donner le visage de l’univers que nous connaissons.
XI.2. Modèles en relativité générale La relativité générale est une théorie exceptionnelle en cosmologie car elle permet de décrire des modèles d’évolution de l’univers. L’espace-temps est décrit par une variété géométrique qui peut être vue comme un tout (l’univers) et donc la structure dépend de son contenu. Ce qui autorise la construction d’un modèle d’évolution.
XI.2.1. Métrique isotrope
Forme standard Pour respecter le principe cosmologique, nous cherchons une métrique isotrope. Nous avons déjà vu une telle métrique. La grande différence ici, c’est que nous ne devons plus supposer que la métrique est statique. On obtient donc :
On peut éliminer le coefficient F en choisissant la coordonnée :
Et on élimine le coefficient E en choisissant comme coordonnée du temps : En éliminant les apostrophes et en renommant les fonctions, on arrive à :
C’est la forme que nous avions déjà obtenu mais avec ici des coefficients qui dépendent du temps.
Métrique Les coefficients de la métrique sont :
Connexion Pour simplifier, notons la dérivée par rapport à r par une apostrophe et la dérivée par rapport à t par un point. On a :
Tenseur de Ricci Le calcul des coefficients du tenseur de Ricci donne :
(
)
(
)
(
)
XI.2.2. Coordonnées comobiles
Définition Considérons l’espace dans sa globalité comme étant remplit de particules en chute libre. Chaque particule possède son propre système local de coordonnées et sa propre horloge (temps propre). On choisit un système de coordonnées de manière à ce qu’il coïncide en chaque point avec une des particules (plusieurs particules ayant des mouvements relatifs différents peuvent coexister au même lieu). Ce système est dit système de coordonnées comobiles.
C’est un système de coordonnées idéal pour décrire l’univers si on considère celui-ci comme étant homogène, isotrope et initialement remplit d’un gaz au repos (macroscopique). Considérons une de ces particules. Si on la suit dans son mouvement, ses coordonnées spatiales seront constantes (par définition des coordonnées comobiles) et le temps sera son temps propre. Par conséquent :
Et donc Pour , l’équation des géodésiques de la particule est :
Comme les composantes spatiales sont constantes, il reste seulement :
L’équation se réduit donc à :
En écrivant cette composante de la connexion et en se souvenant que , on trouve :
C’est-à-dire
On appelle donc système de coordonnées comobiles tout système de coordonnées dont la métrique vérifie les conditions : = constant et
Particules initialement au repos Supposons que l’on ait un système de coordonnées comobiles x, t et que l’on définisse un nouveau système de coordonnées par : La métrique sera alors :
Considérons l’instant t = 0 et une particule P au repos. On peut choisir un système de coordonnées local tel qu’à cet instant l’intervalle entre la particule et ses voisines est purement spatial :
(
)
Et le mouvement de P dans l’intervalle dt purement temporel :
(
)
C’est-à-dire qu’on a choisi un système de coordonnées localement plat :
(
)
Comme le système de coordonnées est comobile : et donc partout. La métrique s’écrit donc :
Symétrie sphérique Considérons la métrique a symétrie sphérique : Donc
La condition implique que E est constant : . Donc :
Redéfinissons le temps avec la transformation ci-dessus et posons :
∫
Ce qui donne :
Métrique
Connexion

Tenseur de Ricci
XI.2.3. Métrique de Robertson-Walker
Equation d’Einstein On considère l’univers comme étant remplit d’un gaz homogène de pression négligeable (en première approximation) et soumis aux seules forces de la gravité. On attache un système de coordonnées comobiles aux particules. Donc, par définition, la vitesse des particules est :
On sait que :
Donc
Et donc :
, Le tenseur énergie-impulsion d’un gaz sans pression de densité est donné par : Et il vérifie :
La conservation de l’impulsion
est automatiquement assurée puisque la vitesse des particules est
nulle, il reste donc :
(
)
Cette dernière relation peut s’écrire :
( √ )

Considérons maintenant l’équation d’Einstein :
(
) (
)
On a donc :
L’équation d’Einstein se réduit donc à quatre équations différentielles :
(
)
(
)
Métrique de Robertson-Walker Cette métrique est dite aussi métrique de Robertson-Walker-Friedmann-Lemaître. La densité ne dépend que du temps. Cherchons une solution sous forme séparable : La dernière équation différentielle entraine :
On choisit f et g de manière à avoir S = R et . On a donc : Les deux premières équations différentielles deviennent ainsi :
(
)
Les termes avec f ne dépendent que de r et les autres ne dépendent que de t. On peut donc choisir une constante k telle que :
Donc :
La solution est :
Cela nous donne la métrique de Robertson-Walker décrivant un univers homogène et isotrope remplit d’un gaz sans pression :
(
)
La fonction est appelée rayon de l’univers (même si elle ne correspond pas nécessairement à la définition habituelle du rayon d’une variété) et k est une constante. En choisissant convenablement la coordonnée r, on peut choisir k égal à 0, +1 ou -1. Les équations différentielles se réduisent maintenant à :
XI.2.4. Modèles d’univers Différentes valeurs de k conduisent à différents modèles d’univers en relativité générale.
Modèle elliptique ou sphérique Pour k = 1, la coordonnée r ne peut dépasser 1 sans introduire de discontinuité. On pose alors . La métrique devient : Il décrit un espace-temps dont les « feuilles » spatiales sont finies, fermées sur elles-mêmes mais non bornées, comme la surface d’une sphère (si ce n’est que les feuilles sont ici à trois dimensions).
Modèle euclidien Pour k = 0, on peut garder la même coordonnée . Dans ce cas :
L’espace est alors fini et euclidien.
Modèle hyperbolique Enfin, pour k = 1, la coordonnée r peut varier de 0 à l’infini et on pose , ce qui donne
L’espace est alors ouvert et infini avec une courbure négative dite hyperbolique.
Exercices
1. ✰✰ Déduisez les propriétés évoquées de chaque métrique.
XI.2.5. Equations fondamentales La métrique de Robertson-Walker a pour composantes :
Avec

La connexion a pour composantes :
(
)
Et enfin, le tenseur de Ricci a pour composantes :
( )
Supposons que le fluide remplissant l’univers est un fluide parfait de densité et de pression P. Le tenseur énergie-impulsion s’écrit
Avec (système comobile) et . On a alors
On calcule aisément :
Et
Donc :
On obtient ainsi le terme de source de l’équation d’Einstein :
Dont les composantes sont :
On peut ainsi écrire l’équation d’Einstein pour les composantes :
En éliminant la dérivée seconde, on a :
La conservation du tenseur énergie-impulsion s’écrit :
On a donc :
√
(√ )
Où g est le déterminant de la métrique.
Comme , et , pour on trouve :
√
√
est égal à -1 et le déterminant de la métrique vaut : Ainsi on aboutit à :
A l’équation d’Einstein et l’équation de conservation il faut ajouter l’équation d’état du gaz stellaire. L’ensemble forme les équations fondamentales de la dynamique cosmologique.
{
Donnons deux exemples.
1) L’univers est actuellement dominé par la présence de matière non relativiste de pression négligeable. La dernière équation donne donc = constant.
2) Au tout début, l’univers était remplit d’un gaz à très haute température dominé essentiellement par le rayonnement. Pour un gaz stellaire ultrarelativiste, on a :
et l’équation de conservation devient :
C’est-à-dire :
= constant On voit que la densité d’énergie du rayonnement diminue avec R beaucoup plus vite que la matière. Ceci explique que l’univers soit actuellement dominé par la matière.
Exercices
1. ✰✰✰ Voici un exercice singulièrement difficile mais fort intéressant. Il s’agit ici de calculer comment s’effectue l’effondrement d’une étoile. Pour simplifier, considérez une « boulle de poussière ». C’est-à-dire une boule de matière de densité mais sans pression. Hints.
a. Pour l’intérieur de la boule, utilisez une métrique de Robertson-Walker. b. Pour l’extérieur de la boule, utilisez une métrique (par exemple Schwartzchild). c. Raccordez les coordonnées à l’interface. d. Calculez comment s’effondre la boule, quand se forme l’horizon,…

XI.2.6. Décalage vers le rouge Une onde électromagnétique émise à l’origine des coordonnées et se déplaçant dans une direction donnée par et obéit à l’équation :
C’est-à-dire :
√
Supposons qu’une galaxie émette un rayonnement en en . Ce rayonnement est alors reçu par un observateur placé à l’origine des coordonnées en . On a donc :
∫
∫
√
{
Supposons que l’onde a une fréquence à l’émission donnée par . Le front d’onde suivant sera donc émis en et reçu en . On aura donc
∫
La période étant infinitésimale par rapport aux durées cosmologiques on peut considérer que reste constant pendant l’émission de deux fronts d’onde. Par conséquent :
∫
∫
Si on désigne une primitive de cette intégrale par :
∫
Alors : Donc :
Cela donne la relation :
Cela donne immédiatement le rapport des fréquences :
On dit parfois que les longueurs d’onde sont « étirées » par l’expansion de l’univers. Le décalage spectral est alors donné par :
Les observations donnent un décalage vers le rouge proportionnel à la distance, ce qui correspond à un univers en expansion.

XI.2.7. Loi de Hubble On définit la constante de Hubble comme la vitesse d’expansion avec la distance, donc :
Et on définit le paramètre de décélération comme :
On peut alors développer en série le paramètre R autour de la valeur correspondant à l’instant actuel avec pour les constantes et :
[
]
Le décalage vers le rouge peut aussi s’exprimer comme un développement en série :
(
)
Il est à noter que le paramètre est très difficile à mesurer, l’écart à la linéarité étant très faible. De plus, la découverte que l’expansion est actuellement accélérée et non décélérée à nécessiter d’adapter les modèles.
XI.3. Géométrie et topologie
Visualiser l’univers Il est très difficile de visualiser une variété à quatre dimensions, même sans courbure. Il est même difficile de visualiser un espace courbe à trois dimensions. Le cas le plus facile est le modèle euclidien. Dans ce cas, l’univers est infini, spatialement plat, avec simplement un contenu en expansion, c’est-à-dire dont chaque parties s’éloignent les unes des autres. Le cas hyperbolique n’est pas beaucoup plus compliqué si ce n’est la distorsion de la géométrie, par exemple la somme des angles aux sommets d’un triangle fait moins de 180°. Dans le cas sphérique, une représentation souvent adoptée est celle de la bulle.
L’univers est représenté comme une bulle en train de gonfler, les galaxies placées à la surface s’écartent alors les unes des autres. Cette représentation est correcte, la géométrie de la surface est d’ailleurs bien sphérique, mais elle est trompeuse si on ne prend garde de préciser deux choses importantes.
1) L’univers est la L’univers est la surface de la bulle et non la bulle toute entière. Dit autrement, la variété espace-temps qu’est ici la surface de la bulle n’a pas besoin d’être plongée dans un espace plus grand pour former une bulle. Seule compte la courbure intrinsèque et la courbure extrinsèque due au repliement dans un espace plus grand n’est là que pour nous aider à visualiser la variété sphérique. Il est difficile mais nécessaire de faire abstraction de tout ce qui ne concerne pas l’univers lui-même : la surface et sa géométrie sphérique intrinsèque. Une phrase comme « en dehors de l’univers » n’a tout simplement pas de sens puisque l’univers est par définition la totalité de toute chose.
2) L’univers n’est pas une surface, c’est une variété à trois dimensions. Il est bien entendu plus difficile de visualiser la « surface » à trois dimensions d’une sphère en quatre dimensions, bien que géométriquement cela ne pose pas de difficulté.
Un autre point important est à préciser :
Si l’univers est fini, comme dans le cas sphérique, alors en remontant le temps il était beaucoup plus petit jusqu’à tenir dans une « coquille de noix », très dense et très chaude.
Si l’univers est infini, alors il l’a toujours été. Cela n’empêche pas un étant dense et chaud par le passé. Et la partie de l’univers que nous observons, l’univers observable, a, elle, été très petite à une époque passée.1
Nous n’avons aucun moyen de vérifier dans quel cas où l’on se trouve. Tout au plus peut-on vérifier la géométrie de l’univers observable. Mais tout raisonnement sur l’univers entier est forcément spéculatif car non vérifiable, a fortiori sa finitude. Même des arguments philosophiques peuvent conduire autant à l’une possibilité qu’à l’autre.
Topologie La géométrie concerne les propriétés locales : la courbure, les distances entre points, les relations de proche en proche. La topologie concerne la forme globale de la variété, ses propriétés globales. Les équations de la relativité générale sont liées à la géométrie intrinsèque. Les relations dynamique telle que l’équation des géodésiques et l’équation d’Einstein permettent de trouver la géométrie de l’univers, mais pas la topologie qui reste inconnue. La géométrie contraint partiellement la topologie, mais pas entièrement. Par exemple, une géométrie sphérique en tout point implique un univers fini. Mais même comme cela il reste de nombreuses possibilités. Le classement des topologies différentes pour un univers ayant une courbure spatiale constante donnée est possible pour le cas euclidien et sphérique. Le cas hyperbolique est plus difficile et le classement n’est pas entièrement connu. Prenons un exemple dans le cas de la géométrie euclidienne.
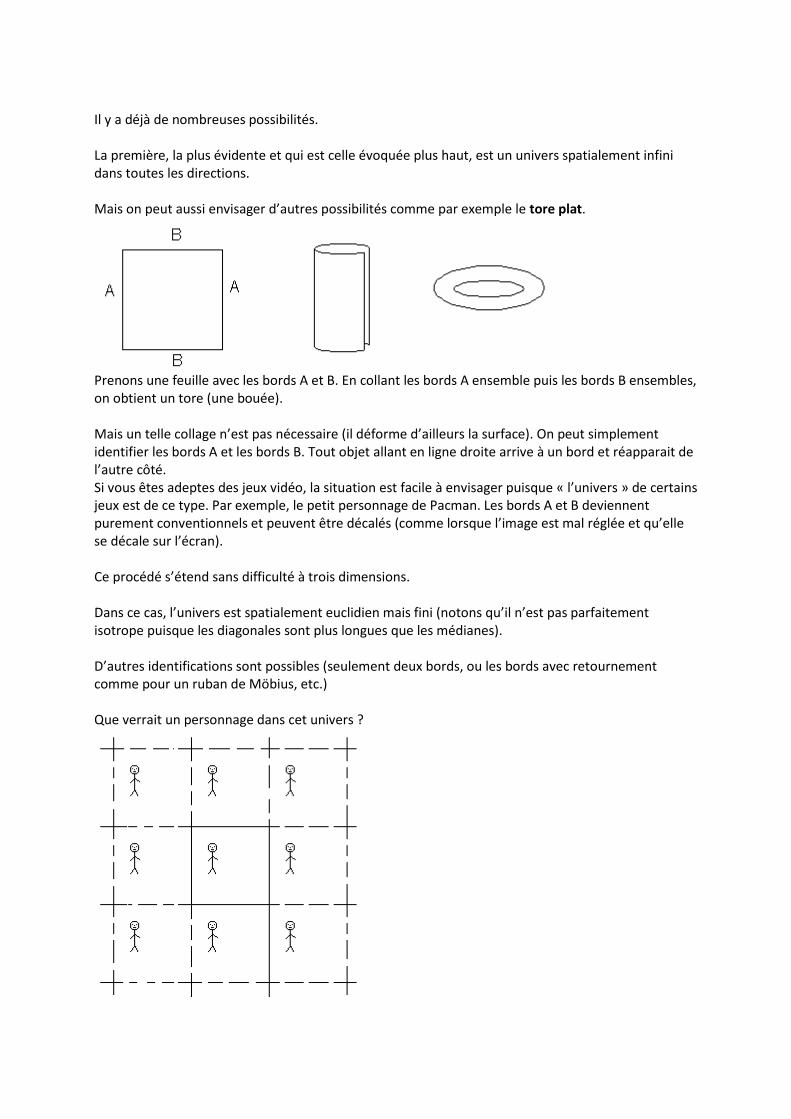
Il y a déjà de nombreuses possibilités. La première, la plus évidente et qui est celle évoquée plus haut, est un univers spatialement infini dans toutes les directions. Mais on peut aussi envisager d’autres possibilités comme par exemple le tore plat.
Prenons une feuille avec les bords A et B. En collant les bords A ensemble puis les bords B ensembles, on obtient un tore (une bouée). Mais un telle collage n’est pas nécessaire (il déforme d’ailleurs la surface). On peut simplement identifier les bords A et les bords B. Tout objet allant en ligne droite arrive à un bord et réapparait de l’autre côté. Si vous êtes adeptes des jeux vidéo, la situation est facile à envisager puisque « l’univers » de certains jeux est de ce type. Par exemple, le petit personnage de Pacman. Les bords A et B deviennent purement conventionnels et peuvent être décalés (comme lorsque l’image est mal réglée et qu’elle se décale sur l’écran). Ce procédé s’étend sans difficulté à trois dimensions. Dans ce cas, l’univers est spatialement euclidien mais fini (notons qu’il n’est pas parfaitement isotrope puisque les diagonales sont plus longues que les médianes). D’autres identifications sont possibles (seulement deux bords, ou les bords avec retournement comme pour un ruban de Möbius, etc.) Que verrait un personnage dans cet univers ?
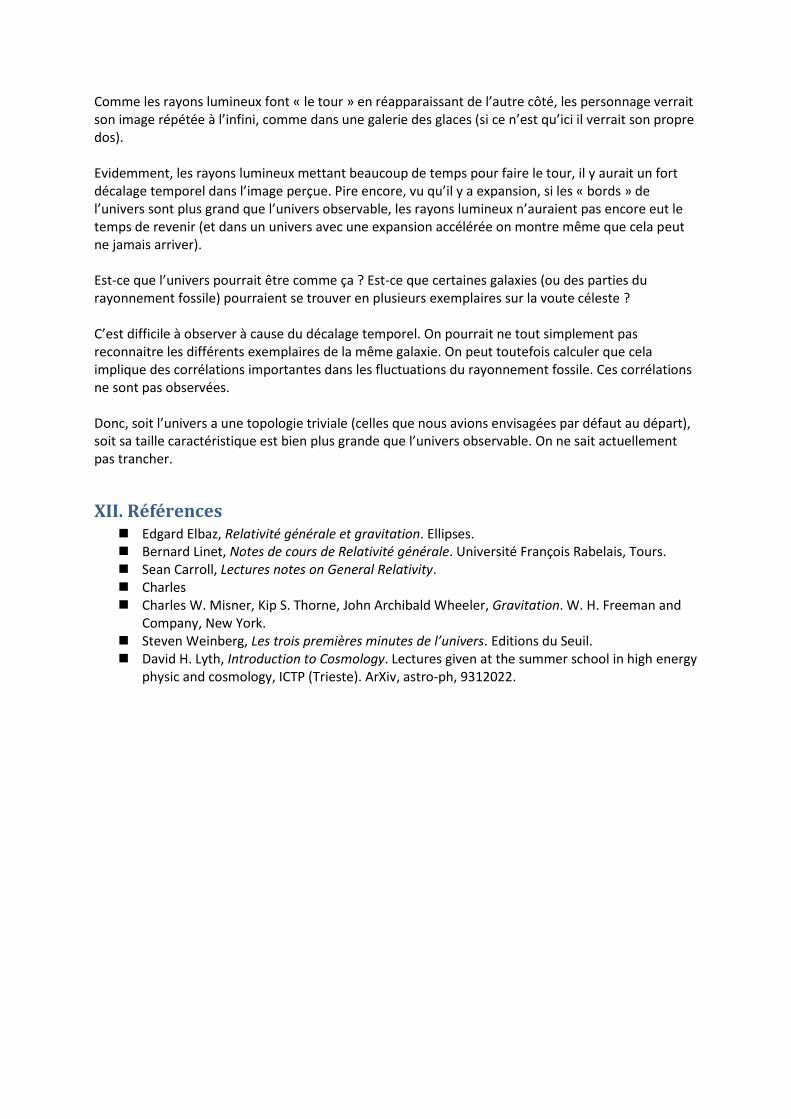
Comme les rayons lumineux font « le tour » en réapparaissant de l’autre côté, les personnage verrait son image répétée à l’infini, comme dans une galerie des glaces (si ce n’est qu’ici il verrait son propre dos). Evidemment, les rayons lumineux mettant beaucoup de temps pour faire le tour, il y aurait un fort décalage temporel dans l’image perçue. Pire encore, vu qu’il y a expansion, si les « bords » de l’univers sont plus grand que l’univers observable, les rayons lumineux n’auraient pas encore eut le temps de revenir (et dans un univers avec une expansion accélérée on montre même que cela peut ne jamais arriver). Est-ce que l’univers pourrait être comme ça ? Est-ce que certaines galaxies (ou des parties du rayonnement fossile) pourraient se trouver en plusieurs exemplaires sur la voute céleste ? C’est difficile à observer à cause du décalage temporel. On pourrait ne tout simplement pas reconnaitre les différents exemplaires de la même galaxie. On peut toutefois calculer que cela implique des corrélations importantes dans les fluctuations du rayonnement fossile. Ces corrélations ne sont pas observées. Donc, soit l’univers a une topologie triviale (celles que nous avions envisagées par défaut au départ), soit sa taille caractéristique est bien plus grande que l’univers observable. On ne sait actuellement pas trancher.
XII. Références Edgard Elbaz, Relativité générale et gravitation. Ellipses. Bernard Linet, Notes de cours de Relativité générale. Université François Rabelais, Tours. Sean Carroll, Lectures notes on General Relativity. Charles Charles W. Misner, Kip S. Thorne, John Archibald Wheeler, Gravitation. W. H. Freeman and
Company, New York. Steven Weinberg, Les trois premières minutes de l’univers. Editions du Seuil. David H. Lyth, Introduction to Cosmology. Lectures given at the summer school in high energy
physic and cosmology, ICTP (Trieste). ArXiv, astro-ph, 9312022.