Embed Size (px)
Citation preview
Controller
KR C2 sr
Spécification
KUKA Roboter GmbH
Publié le: 21.12.2011
Version: Spez KR C2 sr V4 fr
KR C2 sr
2 / 75 Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
© Copyright 2011
KUKA Roboter GmbH
Zugspitzstraße 140
D-86165 Augsburg
Allemagne
La présente documentation ne pourra être reproduite ou communiquée à des tiers, même par ex-traits, sans l'autorisation expresse du KUKA Roboter GmbH.
Certaines fonctions qui ne sont pas décrites dans la présente documentation peuvent également tourner sur cette commande. Dans ce cas, l'utilisateur ne pourra exiger ces fonctions en cas de nou-velle livraison ou de service après-vente.
Nous avons vérifié la concordance entre cette brochure et le matériel ainsi que le logiciel décrits. Des différences ne peuvent être exclues. Pour cette raison, nous ne pouvons garantir la concordance exacte. Les informations de cette brochure sont néanmoins vérifiées régulièrement afin d'inclure les corrections indispensables dans l'édition suivante.
Sous réserve de modifications techniques n'influençant pas les fonctions.
Traduction de la documentation originale
KIM-PS5-DOC
Publication: Pub Spez KR C2 sr (PDF) fr
Structure de livre: Spez KR C2 sr V5.1
Version: Spez KR C2 sr V4 fr
Table des matières
Table des matières
1 Description du produit ................................................................................ 5
1.1 Aperçu du robot industriel .......................................................................................... 5
1.2 Aperçu de la commande du robot .............................................................................. 5
1.3 Description du PC de commande .............................................................................. 6
1.3.1 Riser ..................................................................................................................... 7
1.4 Description de l'unité de puissance ........................................................................... 8
1.5 Description du KUKA Control Panel (KCP) ................................................................ 9
1.5.1 Face avant ............................................................................................................ 10
1.5.2 Face arrière .......................................................................................................... 11
1.6 Coupleur KCP (option) ............................................................................................... 11
1.7 Description des interfaces .......................................................................................... 12
1.7.1 Interface X31 convoyeur (option) .......................................................................... 14
1.7.2 Exemple de circuit X11 ......................................................................................... 14
1.8 Catégorie des circuits de sécurité .............................................................................. 15
2 Caractéristiques techniques ...................................................................... 17
2.1 Dimensions ................................................................................................................ 18
3 Sécurité ........................................................................................................ 21
3.1 Généralités ................................................................................................................. 21
3.1.1 Responsabilité ...................................................................................................... 21
3.1.2 Utilisation du robot industriel conforme aux fins prévues ..................................... 21
3.1.3 Déclaration de conformité CE et déclaration de montage .................................... 22
3.1.4 Termes utilisés ...................................................................................................... 23
3.2 Personnel ................................................................................................................... 23
3.3 Enveloppe d'évolution, zones de protection et de danger ......................................... 25
3.4 Déclencheurs de réactions de stop ............................................................................ 26
3.5 Fonctions de sécurité ................................................................................................. 26
3.5.1 Aperçu des fonctions de sécurité .......................................................................... 26
3.5.2 Logique de sécurité ESC ...................................................................................... 27
3.5.3 Sélecteur des modes ............................................................................................ 27
3.5.4 Protection opérateur ............................................................................................. 28
3.5.5 Dispostif d'ARRET D’URGENCE .......................................................................... 29
3.5.6 Dispositif d'ARRET D'URGENCE externe ............................................................ 30
3.5.7 Dispositif d'homme mort ....................................................................................... 30
3.6 Equipement de protection supplémentaire ................................................................ 31
3.6.1 Mode pas à pas .................................................................................................... 31
3.6.2 Butées logicielles .................................................................................................. 31
3.6.3 Identifications au robot industriel .......................................................................... 32
3.6.4 Dispositifs de protection externes ......................................................................... 32
3.7 Aperçu des modes de fonctionnement et des fonctions de protection ...................... 33
3.8 Mesures de sécurité ................................................................................................... 33
3.8.1 Mesures générales de sécurité ............................................................................. 33
3.8.2 Transport .............................................................................................................. 34
3.8.3 Mise et remise en service ..................................................................................... 35
3.8.4 Antivirus et sécurité du réseau ............................................................................. 36
3.8.5 Mode manuel ........................................................................................................ 37
3 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
4 / 75
KR C2 sr
3.8.6 Simulation ............................................................................................................. 37
3.8.7 Mode automatique ................................................................................................ 38
3.8.8 Maintenance et réparations .................................................................................. 38
3.8.9 Mise hors service, stockage et élimination ........................................................... 39
3.8.10 Mesures de sécurité pour "Single Point of Control" .............................................. 39
3.9 Normes et directives appliquées ............................................................................... 40
4 Planification ................................................................................................. 43
4.1 Conditions de mise en place et de montage ............................................................. 43
4.2 Conditions de branchement ....................................................................................... 44
4.3 Raccordement secteur .............................................................................................. 44
4.4 Circuit d'ARRET D'URGENCE et dispositif de protection ......................................... 45
4.5 Interface X11 ............................................................................................................. 47
4.6 Configuration de mini E/S X12 .................................................................................. 51
4.7 Configuration des E/S du poignet X32 ...................................................................... 54
4.8 Compensation du potentiel terre ............................................................................... 54
4.9 Visualisation de l'option coupleur KCP ...................................................................... 55
4.10 Niveau de performance ............................................................................................. 55
4.10.1 Valeurs PFH des fonctions de sécurité ................................................................ 55
5 Transport ...................................................................................................... 57
5.1 Transport de la commande du robot ......................................................................... 57
6 Mise et remise en service ........................................................................... 59
6.1 Aperçu de la mise en service .................................................................................... 59
6.2 Mise en place de la commande du robot ................................................................... 60
6.3 Connexion des câbles de liaison ............................................................................... 60
6.4 Connexion du KCP .................................................................................................... 61
6.5 Connexion de la compensation du potentiel terre ..................................................... 61
6.6 Connexion de la commande de robot au réseau ....................................................... 61
6.7 Configuration et connexion du connecteur X11 ......................................................... 61
6.8 Configuration et connection du connecteur mini E/S X12 ......................................... 62
6.9 Configuration et connection du connecteur X32 E/S du poignet ............................... 62
7 SAV KUKA ................................................................................................... 63
7.1 Demande d'assistance .............................................................................................. 63
7.2 Assistance client KUKA ............................................................................................. 63
Index ............................................................................................................. 71
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
1 Description du produit
1 Description du produit
1.1 Aperçu du robot industriel
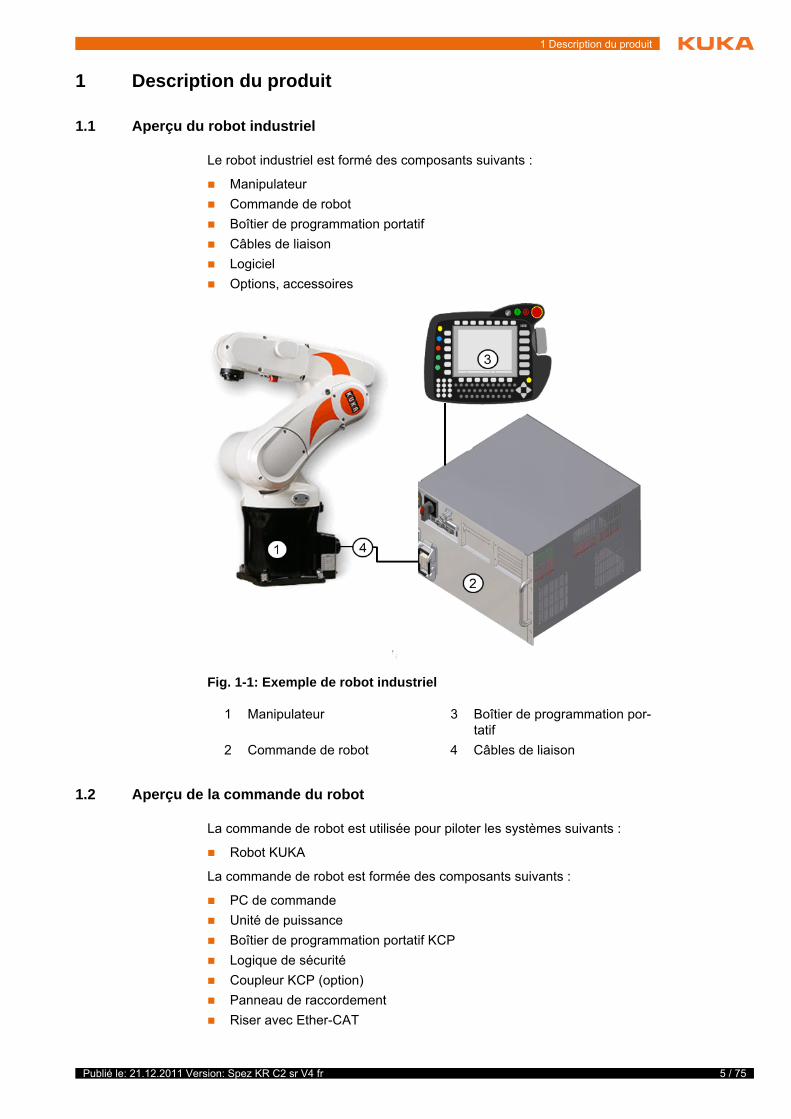
Le robot industriel est formé des composants suivants :
Manipulateur
Commande de robot
Boîtier de programmation portatif
Câbles de liaison
Logiciel
Options, accessoires
1.2 Aperçu de la commande du robot
La commande de robot est utilisée pour piloter les systèmes suivants :
Robot KUKA
La commande de robot est formée des composants suivants :
PC de commande
Unité de puissance
Boîtier de programmation portatif KCP
Logique de sécurité
Coupleur KCP (option)
Panneau de raccordement
Riser avec Ether-CAT
Fig. 1-1: Exemple de robot industriel
1 Manipulateur 3 Boîtier de programmation por-tatif
2 Commande de robot 4 Câbles de liaison
5 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
6 / 75
KR C2 sr
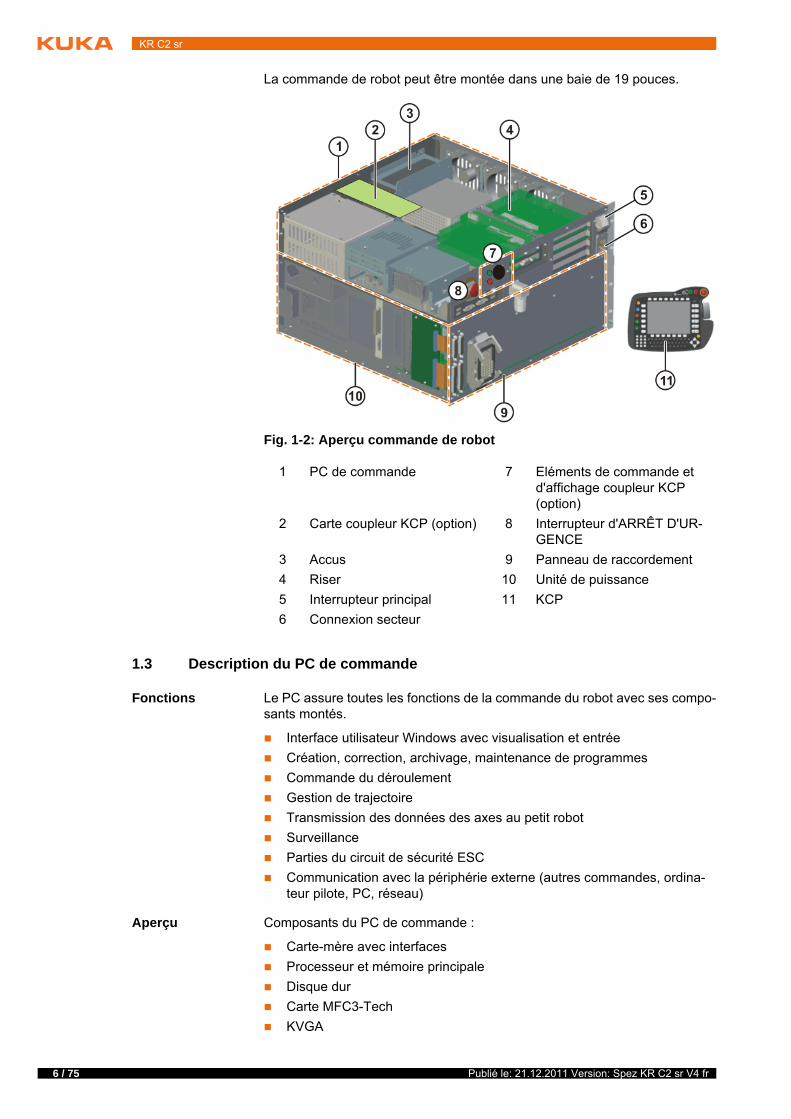
La commande de robot peut être montée dans une baie de 19 pouces.
1.3 Description du PC de commande
Fonctions Le PC assure toutes les fonctions de la commande du robot avec ses compo-sants montés.
Interface utilisateur Windows avec visualisation et entrée
Création, correction, archivage, maintenance de programmes
Commande du déroulement
Gestion de trajectoire
Transmission des données des axes au petit robot
Surveillance
Parties du circuit de sécurité ESC
Communication avec la périphérie externe (autres commandes, ordina-teur pilote, PC, réseau)
Aperçu Composants du PC de commande :
Carte-mère avec interfaces
Processeur et mémoire principale
Disque dur
Carte MFC3-Tech
KVGA
Fig. 1-2: Aperçu commande de robot
1 PC de commande 7 Eléments de commande et d'affichage coupleur KCP (option)
2 Carte coupleur KCP (option) 8 Interrupteur d'ARRÊT D'UR-GENCE
3 Accus 9 Panneau de raccordement
4 Riser 10 Unité de puissance
5 Interrupteur principal 11 KCP
6 Connexion secteur
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
1 Description du produit
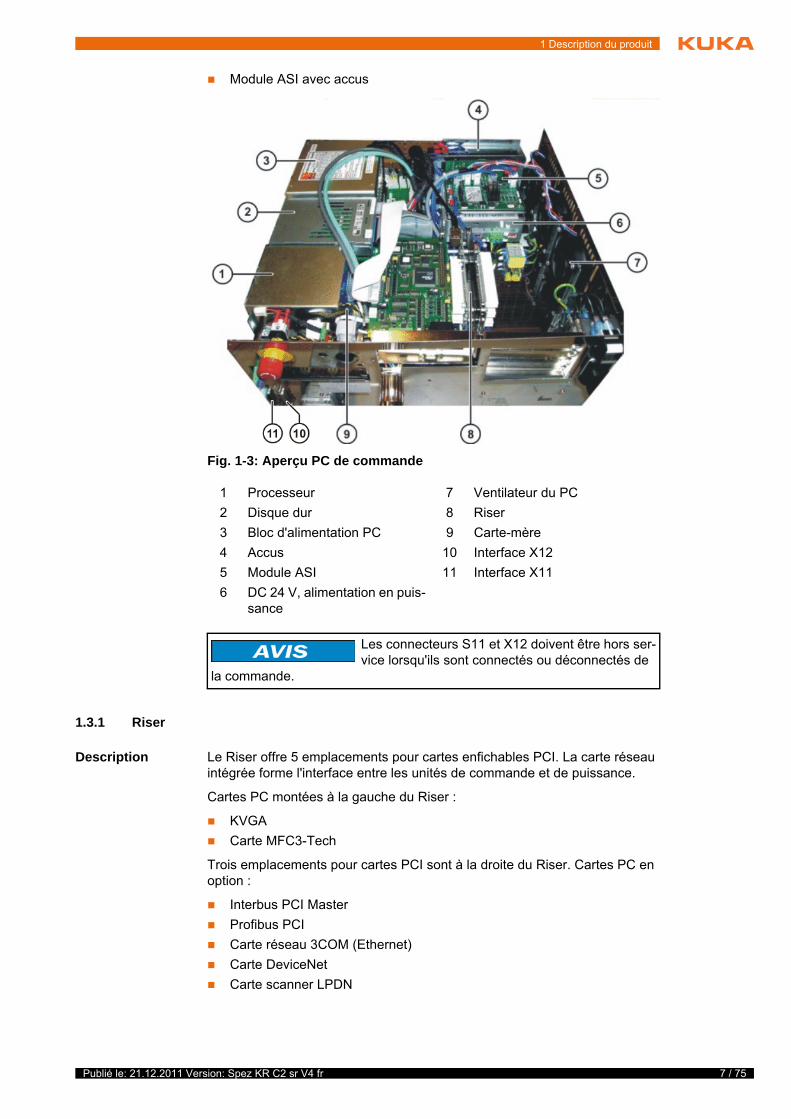
Module ASI avec accus
1.3.1 Riser
Description Le Riser offre 5 emplacements pour cartes enfichables PCI. La carte réseau intégrée forme l'interface entre les unités de commande et de puissance.
Cartes PC montées à la gauche du Riser :
KVGA
Carte MFC3-Tech
Trois emplacements pour cartes PCI sont à la droite du Riser. Cartes PC en option :
Interbus PCI Master
Profibus PCI
Carte réseau 3COM (Ethernet)
Carte DeviceNet
Carte scanner LPDN
Fig. 1-3: Aperçu PC de commande
1 Processeur 7 Ventilateur du PC
2 Disque dur 8 Riser
3 Bloc d'alimentation PC 9 Carte-mère
4 Accus 10 Interface X12
5 Module ASI 11 Interface X11
6 DC 24 V, alimentation en puis-sance
Les connecteurs S11 et X12 doivent être hors ser-vice lorsqu'ils sont connectés ou déconnectés de
la commande.
7 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

8 / 75
KR C2 sr
Emplacements
1.4 Description de l'unité de puissance
Aperçu Les composants suivants font partie de l’unité de puissance :
Bloc de puissance
Cartes IPM
Mini-carte E/S
ESC Safety E/S sr
Ventilateurs (2 pièces en bas)
Carte-mère
Filtre secteur
Fig. 1-4: Cartes du Riser
Pos. Interface Pos. Interface
1 Carte Interbus Maître/Esclave (option)
4 Interface communication interne
2 Carte réseau temps réel ou Windows (option)
5 Carte MFC3-Tech
3 Carte Profibus (option)
Carte réseau Windows (option)
Carte DeviceNet (op-tion)
Carte scanner LPDN
6 KVGA
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
1 Description du produit
1.5 Description du KUKA Control Panel (KCP)
Fonction Le KCP (KUKA Control Panel) est le boîtier de programmation portatif pour le robot. Le KCP possède toutes les fonctions de commande et d'affichage indis-pensables à la commande et à la programmation du système de robot.
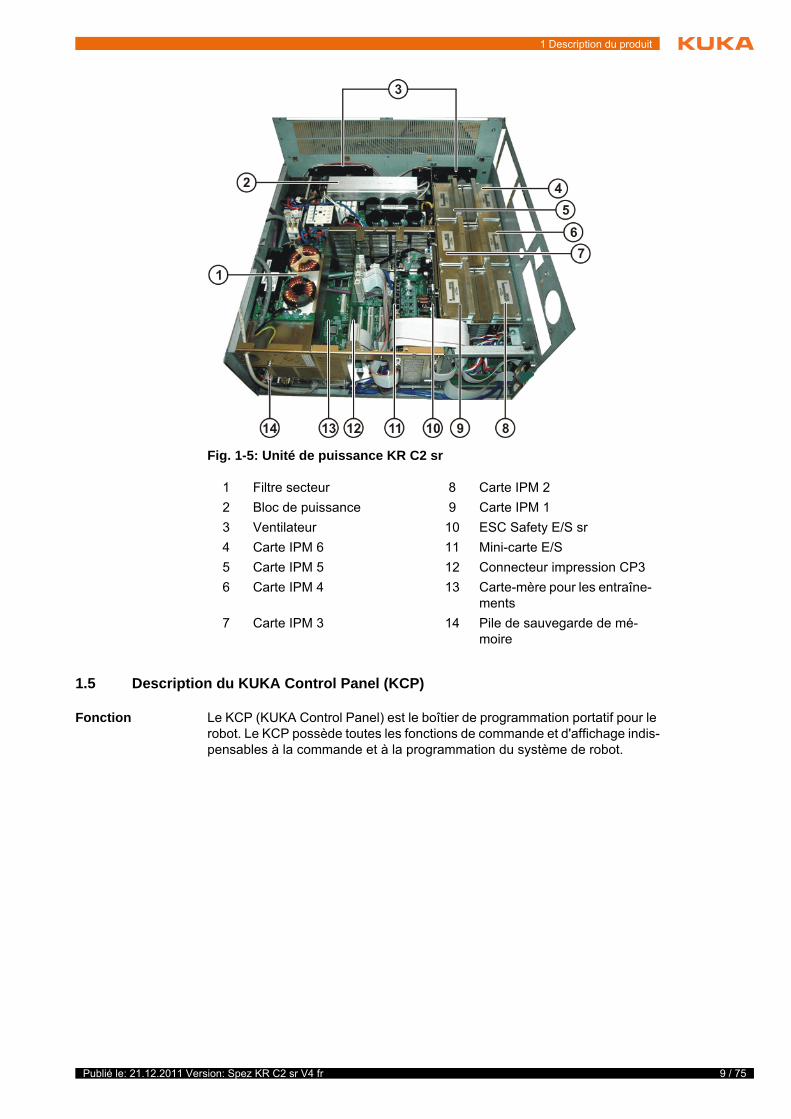
Fig. 1-5: Unité de puissance KR C2 sr
1 Filtre secteur 8 Carte IPM 2
2 Bloc de puissance 9 Carte IPM 1
3 Ventilateur 10 ESC Safety E/S sr
4 Carte IPM 6 11 Mini-carte E/S
5 Carte IPM 5 12 Connecteur impression CP3
6 Carte IPM 4 13 Carte-mère pour les entraîne-ments
7 Carte IPM 3 14 Pile de sauvegarde de mé-moire
9 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
10 / 75
KR C2 sr
1.5.1 Face avant
Aperçu
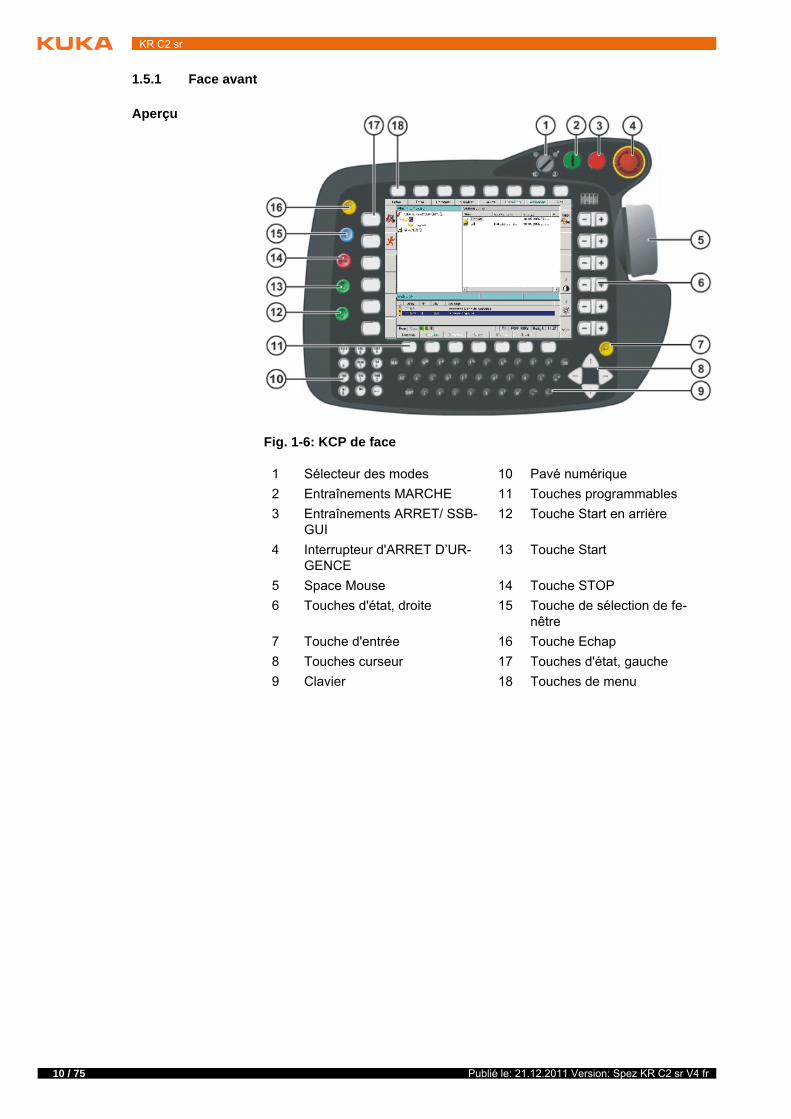
Fig. 1-6: KCP de face
1 Sélecteur des modes 10 Pavé numérique
2 Entraînements MARCHE 11 Touches programmables
3 Entraînements ARRET/ SSB-GUI
12 Touche Start en arrière
4 Interrupteur d'ARRET D’UR-GENCE
13 Touche Start
5 Space Mouse 14 Touche STOP
6 Touches d'état, droite 15 Touche de sélection de fe-nêtre
7 Touche d'entrée 16 Touche Echap
8 Touches curseur 17 Touches d'état, gauche
9 Clavier 18 Touches de menu
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
1 Description du produit
1.5.2 Face arrière
Aperçu
Description
1.6 Coupleur KCP (option)
Description Le coupleur KCP permet de coupler et de découpler le KCP lorsque la com-mande de robot est en marche.
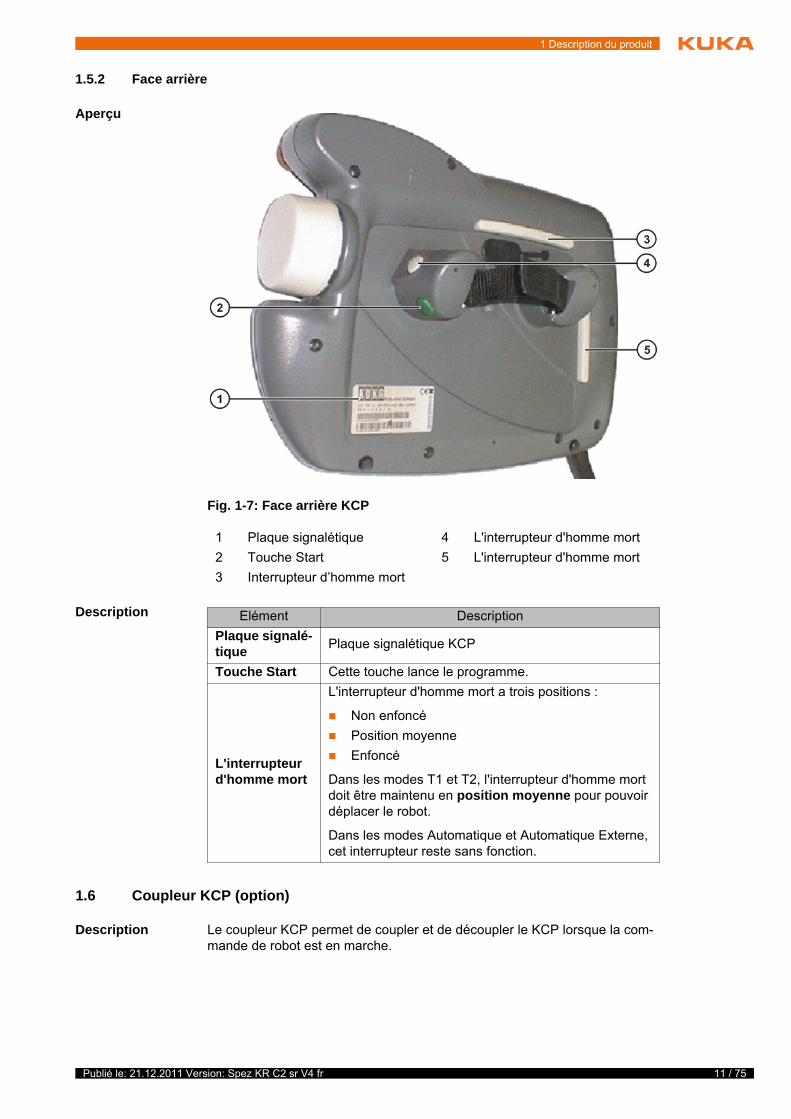
Fig. 1-7: Face arrière KCP
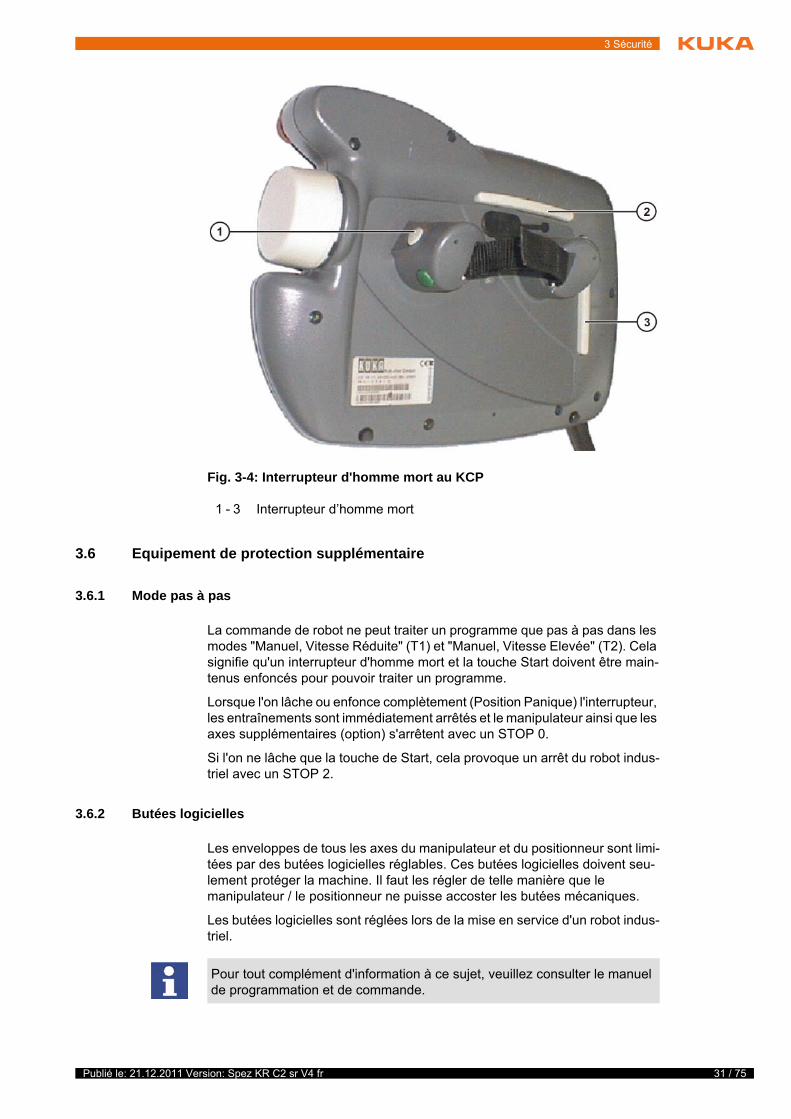
1 Plaque signalétique 4 L'interrupteur d'homme mort
2 Touche Start 5 L'interrupteur d'homme mort
3 Interrupteur d’homme mort
Elément Description
Plaque signalé-tique
Plaque signalétique KCP
Touche Start Cette touche lance le programme.
L'interrupteur d'homme mort
L'interrupteur d'homme mort a trois positions :
Non enfoncé
Position moyenne
Enfoncé
Dans les modes T1 et T2, l'interrupteur d'homme mort doit être maintenu en position moyenne pour pouvoir déplacer le robot.
Dans les modes Automatique et Automatique Externe, cet interrupteur reste sans fonction.
11 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
12 / 75
KR C2 sr
Vue d'ensemble
Carte de coupleur
KCP
Connexions
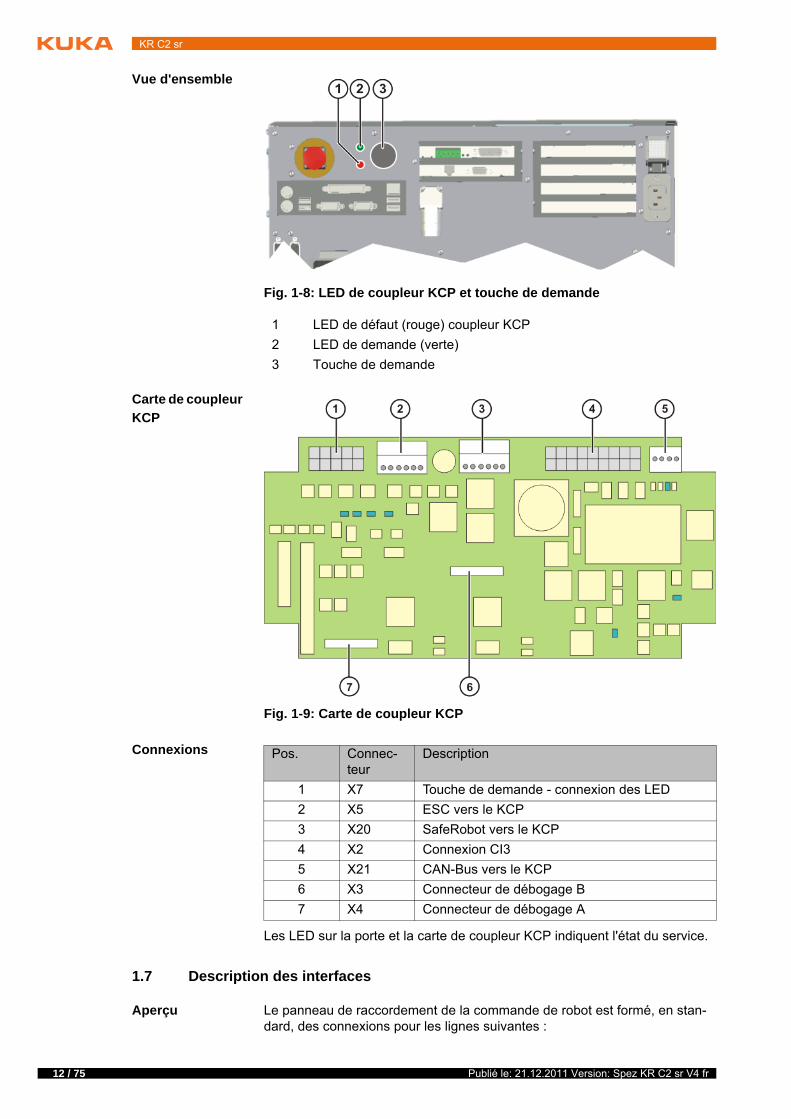
Les LED sur la porte et la carte de coupleur KCP indiquent l'état du service.
1.7 Description des interfaces
Aperçu Le panneau de raccordement de la commande de robot est formé, en stan-dard, des connexions pour les lignes suivantes :
Fig. 1-8: LED de coupleur KCP et touche de demande
1 LED de défaut (rouge) coupleur KCP
2 LED de demande (verte)
3 Touche de demande
Fig. 1-9: Carte de coupleur KCP
Pos. Connec-teur
Description
1 X7 Touche de demande - connexion des LED
2 X5 ESC vers le KCP
3 X20 SafeRobot vers le KCP
4 X2 Connexion CI3
5 X21 CAN-Bus vers le KCP
6 X3 Connecteur de débogage B
7 X4 Connecteur de débogage A
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
1 Description du produit
Câble secteur
Câble moteur/de données
Câble E/S du poignet
Câble KCP
Câble de terre
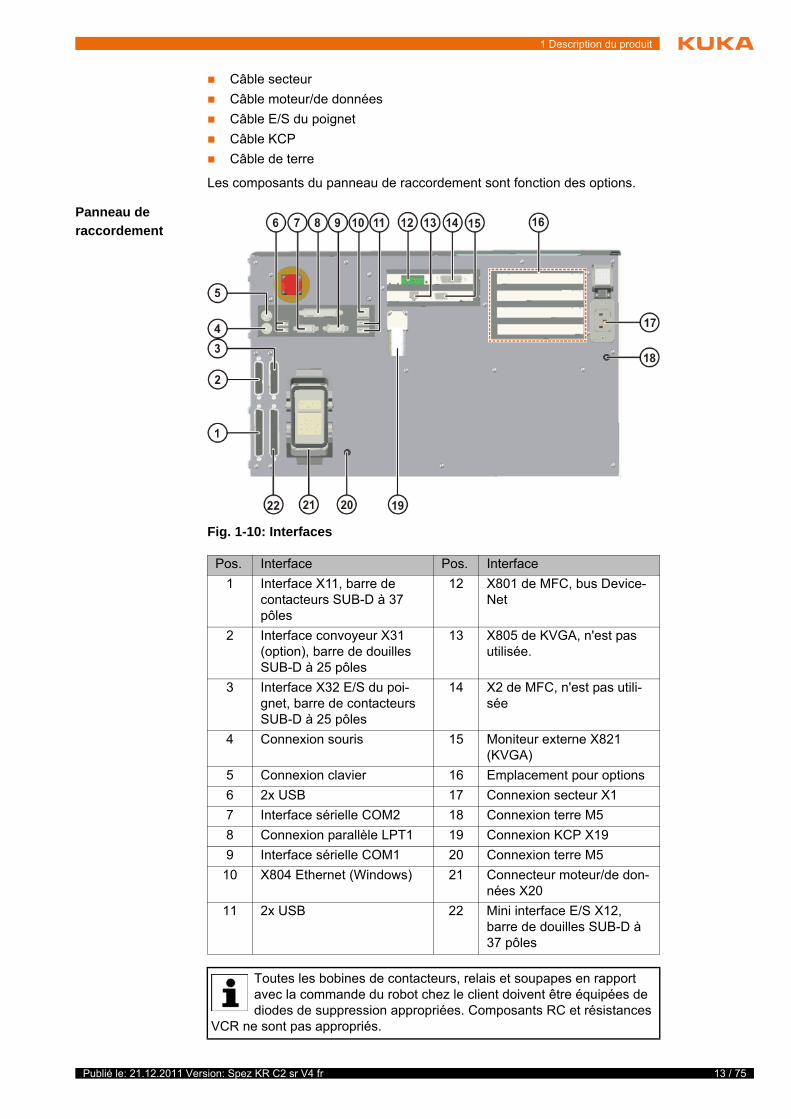
Les composants du panneau de raccordement sont fonction des options.
Panneau de
raccordement
Fig. 1-10: Interfaces
Pos. Interface Pos. Interface
1 Interface X11, barre de contacteurs SUB-D à 37 pôles
12 X801 de MFC, bus Device-Net
2 Interface convoyeur X31 (option), barre de douilles SUB-D à 25 pôles
13 X805 de KVGA, n'est pas utilisée.
3 Interface X32 E/S du poi-gnet, barre de contacteurs SUB-D à 25 pôles
14 X2 de MFC, n'est pas utili-sée
4 Connexion souris 15 Moniteur externe X821 (KVGA)
5 Connexion clavier 16 Emplacement pour options
6 2x USB 17 Connexion secteur X1
7 Interface sérielle COM2 18 Connexion terre M5
8 Connexion parallèle LPT1 19 Connexion KCP X19
9 Interface sérielle COM1 20 Connexion terre M5
10 X804 Ethernet (Windows) 21 Connecteur moteur/de don-nées X20
11 2x USB 22 Mini interface E/S X12, barre de douilles SUB-D à 37 pôles
Toutes les bobines de contacteurs, relais et soupapes en rapport avec la commande du robot chez le client doivent être équipées de diodes de suppression appropriées. Composants RC et résistances
VCR ne sont pas appropriés.
13 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
14 / 75
KR C2 sr
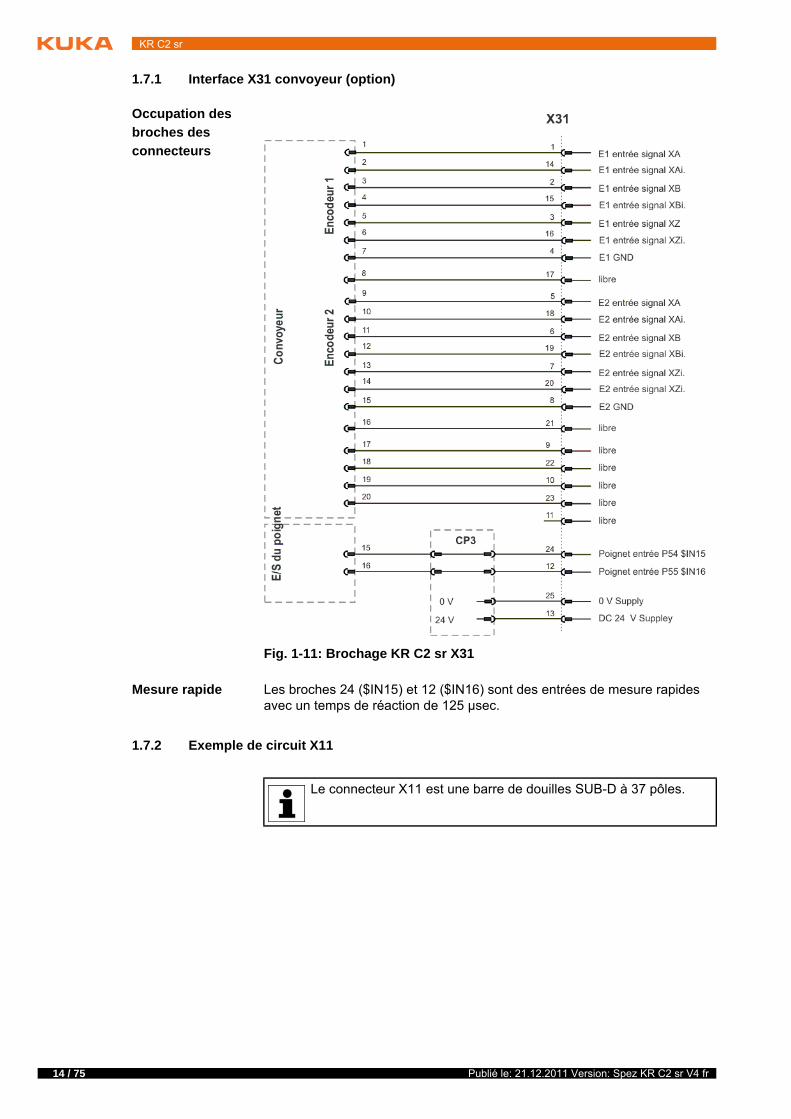
1.7.1 Interface X31 convoyeur (option)
Occupation des
broches des
connecteurs
Mesure rapide Les broches 24 ($IN15) et 12 ($IN16) sont des entrées de mesure rapides avec un temps de réaction de 125 μsec.
1.7.2 Exemple de circuit X11
Fig. 1-11: Brochage KR C2 sr X31
Le connecteur X11 est une barre de douilles SUB-D à 37 pôles.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
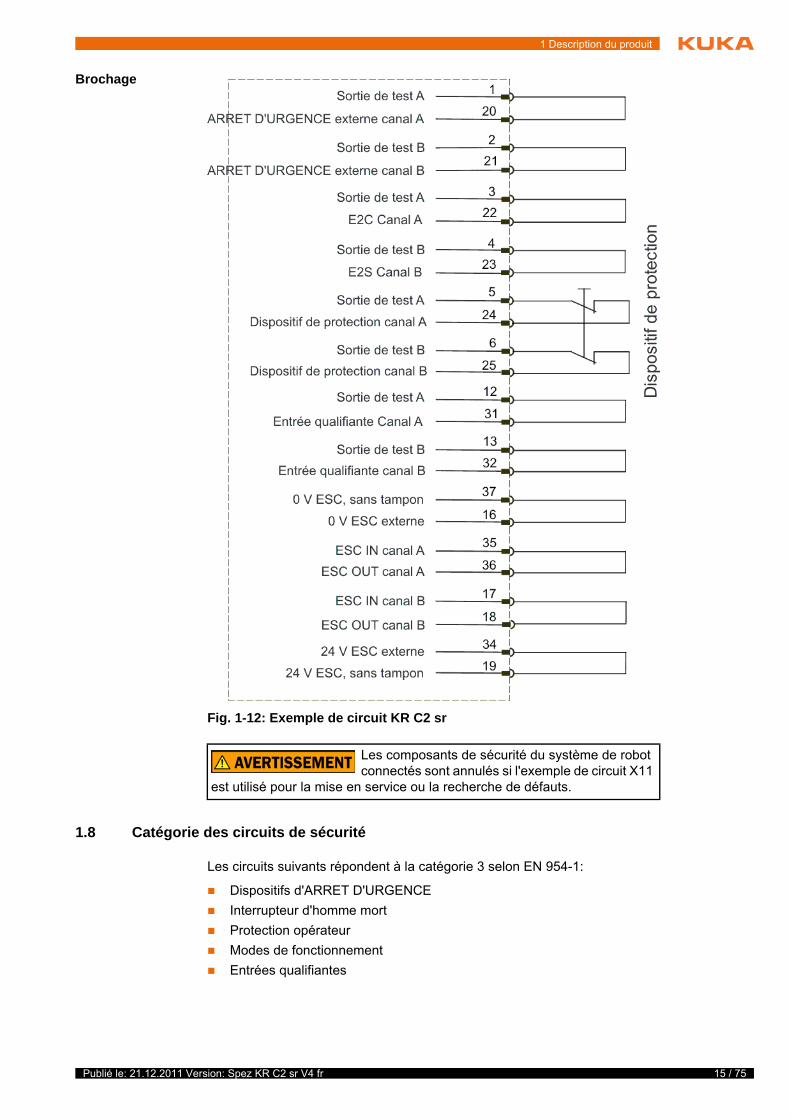
1 Description du produit
Brochage
1.8 Catégorie des circuits de sécurité
Les circuits suivants répondent à la catégorie 3 selon EN 954-1:
Dispositifs d'ARRET D'URGENCE
Interrupteur d'homme mort
Protection opérateur
Modes de fonctionnement
Entrées qualifiantes
Fig. 1-12: Exemple de circuit KR C2 sr
Les composants de sécurité du système de robot connectés sont annulés si l'exemple de circuit X11
est utilisé pour la mise en service ou la recherche de défauts.
15 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

16 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
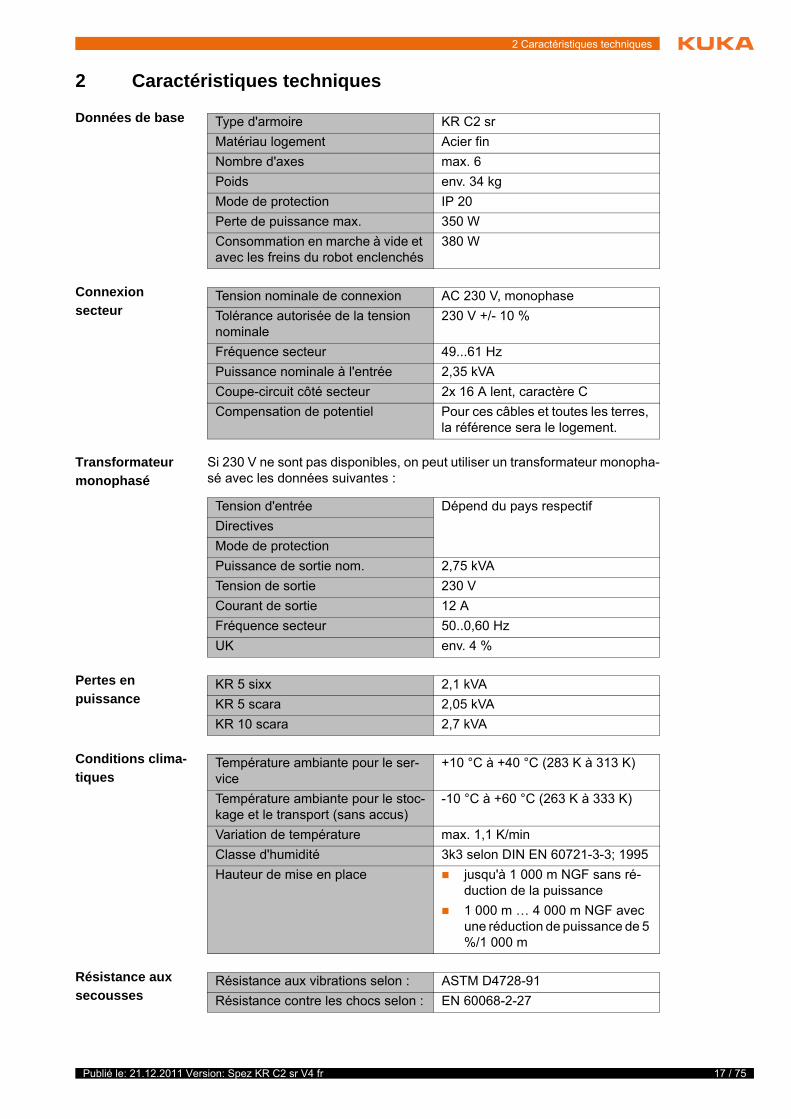
2 Caractéristiques techniques
2 Caractéristiques techniques
Données de base
Connexion
secteur
Transformateur
monophasé
Si 230 V ne sont pas disponibles, on peut utiliser un transformateur monopha-sé avec les données suivantes :
Pertes en
puissance
Conditions clima-
tiques
Résistance aux
secousses
Type d'armoire KR C2 sr
Matériau logement Acier fin
Nombre d'axes max. 6
Poids env. 34 kg
Mode de protection IP 20
Perte de puissance max. 350 W
Consommation en marche à vide et avec les freins du robot enclenchés
380 W
Tension nominale de connexion AC 230 V, monophase
Tolérance autorisée de la tension nominale
230 V +/- 10 %
Fréquence secteur 49...61 Hz
Puissance nominale à l'entrée 2,35 kVA
Coupe-circuit côté secteur 2x 16 A lent, caractère C
Compensation de potentiel Pour ces câbles et toutes les terres, la référence sera le logement.
Tension d'entrée Dépend du pays respectif
Directives
Mode de protection
Puissance de sortie nom. 2,75 kVA
Tension de sortie 230 V
Courant de sortie 12 A
Fréquence secteur 50..0,60 Hz
UK env. 4 %
KR 5 sixx 2,1 kVA
KR 5 scara 2,05 kVA
KR 10 scara 2,7 kVA
Température ambiante pour le ser-vice
+10 °C à +40 °C (283 K à 313 K)
Température ambiante pour le stoc-kage et le transport (sans accus)
-10 °C à +60 °C (263 K à 333 K)
Variation de température max. 1,1 K/min
Classe d'humidité 3k3 selon DIN EN 60721-3-3; 1995
Hauteur de mise en place jusqu'à 1 000 m NGF sans ré-duction de la puissance
1 000 m … 4 000 m NGF avec une réduction de puissance de 5 %/1 000 m
Résistance aux vibrations selon : ASTM D4728-91
Résistance contre les chocs selon : EN 60068-2-27
17 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
18 / 75
KR C2 sr
KUKA Control
Panel
Longueurs de
câbles
Veuillez vous reporter au tableau ci-après pour les désignations des câbles, les longueurs des câbles (standard) et les longueurs spéciales.
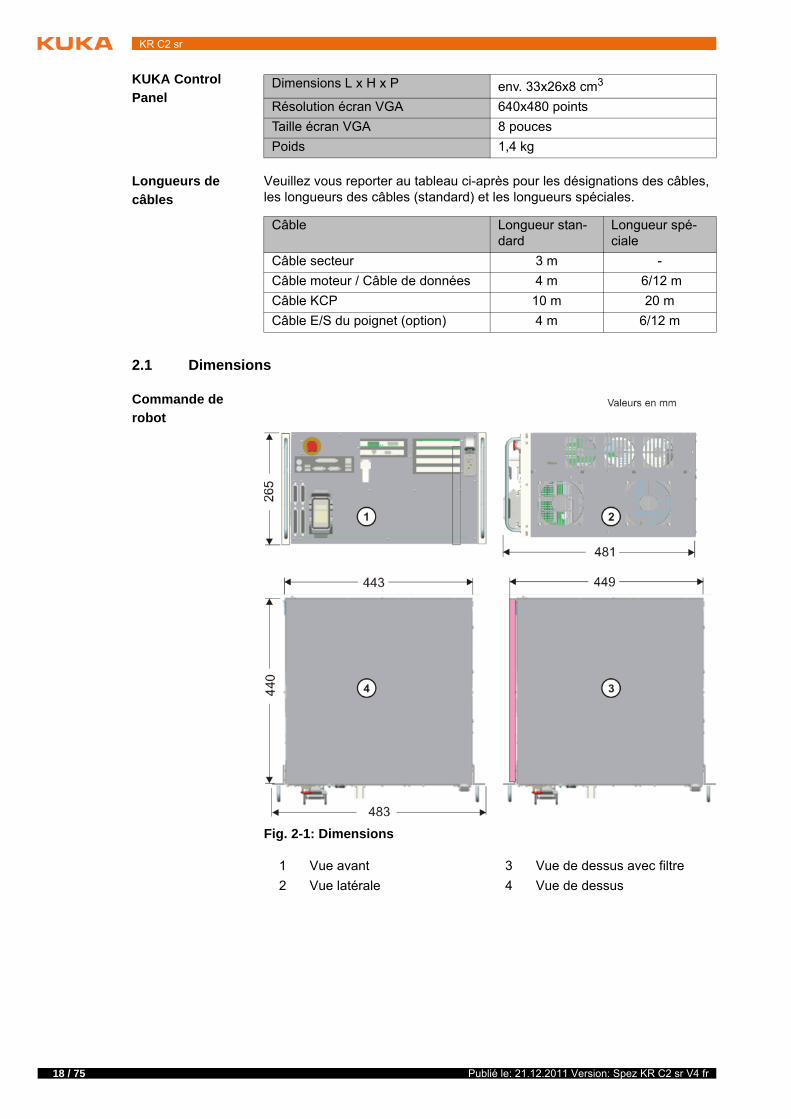
2.1 Dimensions
Commande de
robot
Dimensions L x H x P env. 33x26x8 cm3
Résolution écran VGA 640x480 points
Taille écran VGA 8 pouces
Poids 1,4 kg
Câble Longueur stan-dard
Longueur spé-ciale
Câble secteur 3 m -
Câble moteur / Câble de données 4 m 6/12 m
Câble KCP 10 m 20 m
Câble E/S du poignet (option) 4 m 6/12 m
Fig. 2-1: Dimensions
1 Vue avant 3 Vue de dessus avec filtre
2 Vue latérale 4 Vue de dessus
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
2 Caractéristiques techniques
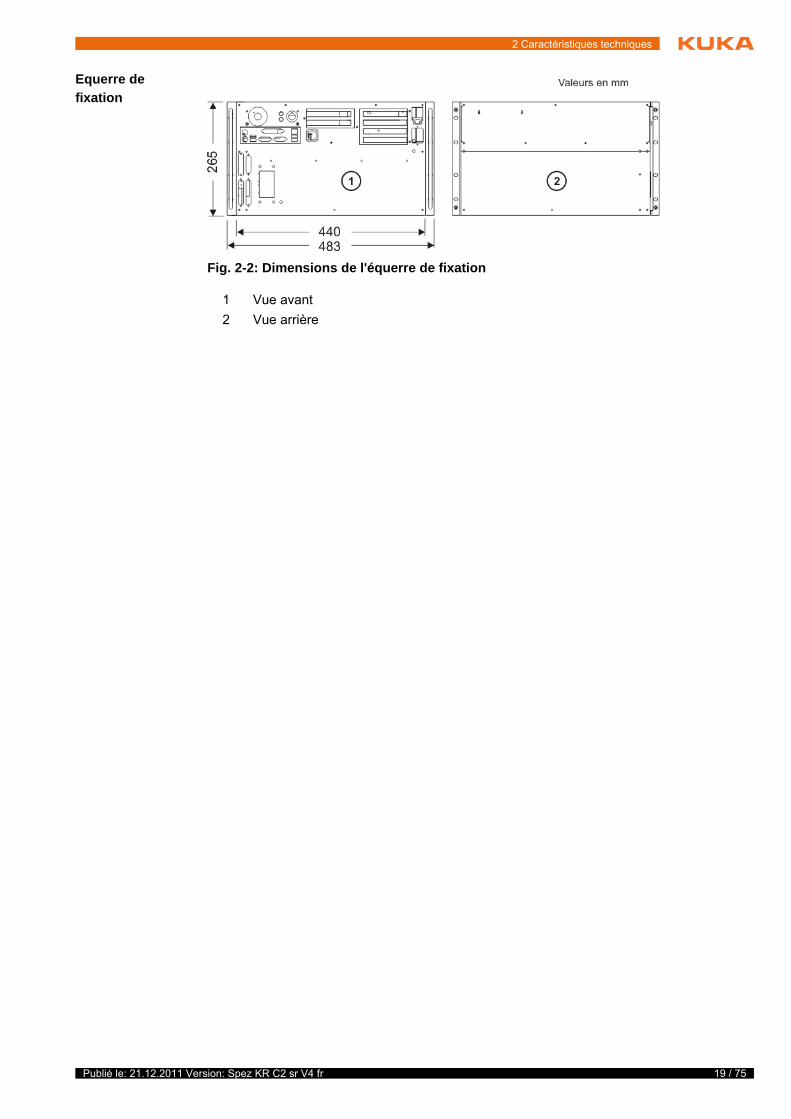
Equerre de
fixation
Fig. 2-2: Dimensions de l'équerre de fixation
1 Vue avant
2 Vue arrière
19 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

20 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3 Sécurité
3.1 Généralités
3.1.1 Responsabilité
L'appareil décrit dans le présent document est ou un robot industriel ou un composant de robot industriel.
Composants du robot industriel :
Manipulateur
Commande du robot
Boîtier de programmation portatif
Câbles de liaison
Axes supplémentaires (option)
par ex unité linéaire, table tournante/basculante, positionneur
Logiciel
Options, accessoires
Le robot industriel est construit conformément au niveau actuel de la tech-nique et aux règles techniques reconnues en matière de sécurité. Cependant, l'utilisation non conforme peut se traduire par des dangers de blessures ou de mort et des dommages du robot industriel et d'autres valeurs matérielles.
Le robot industriel ne doit être utilisé que lorsqu'il est en parfait état technique, en tenant compte de la conformité d'utilisation, de la sécurité et des dangers. Son utilisation doit s'effectuer conformément aux prescriptions du présent do-cument et à la déclaration de montage jointe à la livraison du robot industriel. Les défauts susceptibles de nuire à la sécurité doivent être éliminés sans re-tard.
Informations
relatives à la
sécurité
Les informations relatives à la sécurité ne pourront être interprétées en défa-veur de la société KUKA Roboter GmbH. Même si toutes les remarques sont observées, on ne peut exclure un dommage corporel ou matériel dû au robot industriel.
Il est interdit de modifier le robot industriel sans autorisation préalable de KUKA Roboter GmbH. Les composants supplémentaires (outils, logiciels, etc.) non compris dans la fourniture KUKA Roboter GmbH peuvent être inté-grés dans le robot industriel. En ce cas, la société ayant installé ces produits est responsable de tout dommage au robot industriel ou à d'autres valeurs matérielles causé par un tel composant.
Pour compléter le chapitre de sécurité, on dispose de consignes de sécurité supplémentaires dans cette documentation. Elles doivent également être prises en compte.
3.1.2 Utilisation du robot industriel conforme aux fins prévues
Le robot industriel est prévu exclusivement pour l'utilisation nommée dans le manuel ou dans les instructions de montage, au chapitre "Affectation".
Tout usage autre ou divergent est considéré comme non conforme et n'est pas autorisé. Dans ce cas, le fabricant décline expressément toute responsa-
Pour tout complément d'information, veuillez consulter le chapitre "Affecta-tion" du manuel ou les instructions de montage du robot industriel.
21 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
22 / 75
KR C2 sr
bilité pour les dommages éventuels occasionnés. Le risque est à la seule charge de l'exploitant.
La désignation "Usage conforme" s'applique également à l'observation du ma-nuel et des instructions de montage pour chaque composant et en particulier au respect des intervalles de maintenance.
Erreur d'utili-
sation
Toute utilisation non conforme aux fins prévues est considirée comme une er-reur d'utilisation et est interdite. Il s'agit, par ex, de :
Transport de personnes et d'animaux
Utilisation comme escalier
Utilisation ne respectant pas les seuils de service
Utilisation dans un environnement soumis à des risques de déflagration
Utilisation sans dispositifs de protection supplémentaires
Utilisation à l'extérieur
3.1.3 Déclaration de conformité CE et déclaration de montage
Avec ce robot industriel, nous avons affaire à une machine incomplète confor-mément à la directive CE des machines. Le robot industriel ne peut être mis en service que dans les conditions suivantes :
Le robot industriel est intégré dans une installation.
Ou : le robot industriel compose une installation avec d'autres machines.
Ou : toutes les fonctions de sécurité et les dispositifs de protection indis-pensables pour une machine complète conformément à la Directive Ma-chines CE ont été complétés sur le robot industriel.
L'installation répond aux critères imposés par la Directive Machines CE. Ceci a été déterminé par un procédé d'évaluation de conformité.
Déclaration de
conformité
L'intégrateur de système doit établir une déclaration de conformité selon la Di-rective Machines pour l'ensemble de l'installation. La déclaration de conformi-té est la base de l'identification CE de l'installation. Le robot industriel ne pourra être utilisé que conformément aux directives, lois et normes en vigueur dans le pays en question.
La commande de robot est certifiée CE conformément à la directive CEM et à la directive basse tension
Déclaration de
montage
Le robot industriel est livré en tant que machine incomplète avec une déclara-tion de montage, conformément à l'annexe II B de la Directive Machines 2006/42/CE. Dans cette déclaration de montage se trouve une liste comprenant les exigences fondamentales respectées selon l'annexe I et les instructions de montage.
La déclaration de montage déclare que la mise en service de la machine in-complète est interdite jusqu'à ce que la machine incomplète soit montée dans une machine ou assemblée avec d'autres pièces pour former une machine correspondant aux exigences de la Directive Machines CE et répondant à la déclaration de conformité CE selon l'annexe II A.
La déclaration de montage reste auprès de l'intégrateur de système en tant que partie de la documentation technique de la machine incomplète.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
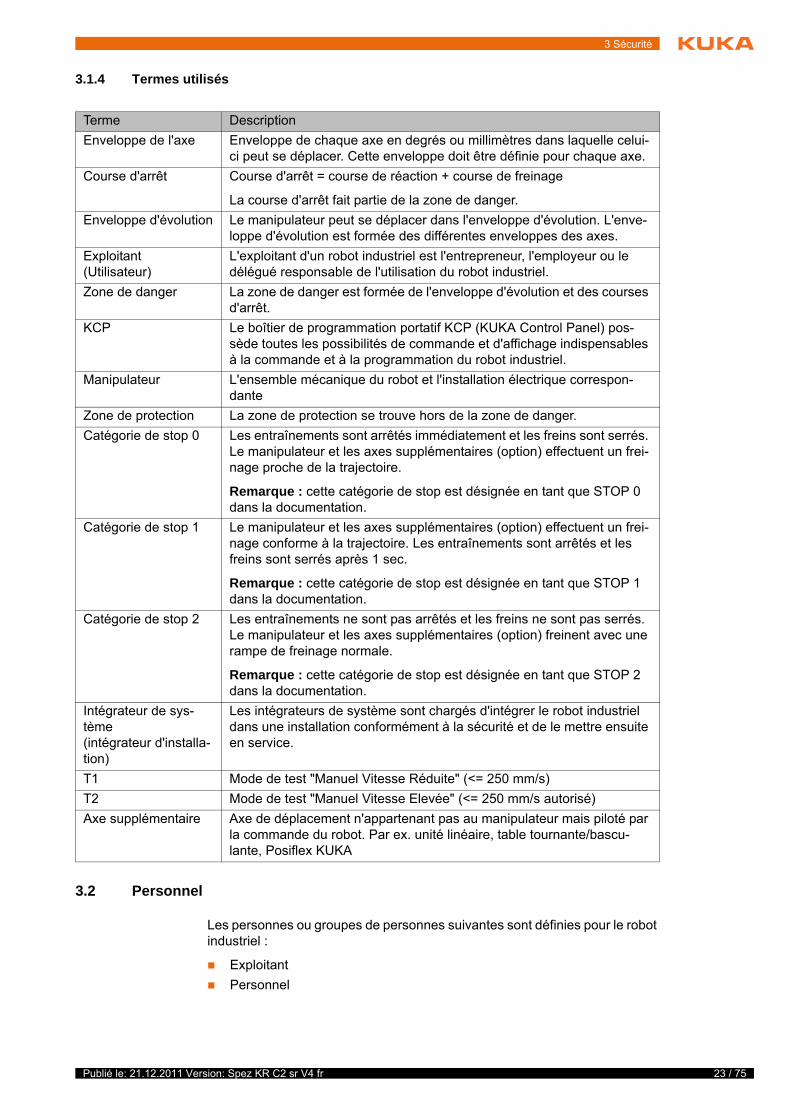
3.1.4 Termes utilisés
3.2 Personnel
Les personnes ou groupes de personnes suivantes sont définies pour le robot industriel :
Exploitant
Personnel
Terme Description
Enveloppe de l'axe Enveloppe de chaque axe en degrés ou millimètres dans laquelle celui-ci peut se déplacer. Cette enveloppe doit être définie pour chaque axe.
Course d'arrêt Course d'arrêt = course de réaction + course de freinage
La course d'arrêt fait partie de la zone de danger.
Enveloppe d'évolution Le manipulateur peut se déplacer dans l'enveloppe d'évolution. L'enve-loppe d'évolution est formée des différentes enveloppes des axes.
Exploitant(Utilisateur)
L'exploitant d'un robot industriel est l'entrepreneur, l'employeur ou le délégué responsable de l'utilisation du robot industriel.
Zone de danger La zone de danger est formée de l'enveloppe d'évolution et des courses d'arrêt.
KCP Le boîtier de programmation portatif KCP (KUKA Control Panel) pos-sède toutes les possibilités de commande et d'affichage indispensables à la commande et à la programmation du robot industriel.
Manipulateur L'ensemble mécanique du robot et l'installation électrique correspon-dante
Zone de protection La zone de protection se trouve hors de la zone de danger.
Catégorie de stop 0 Les entraînements sont arrêtés immédiatement et les freins sont serrés. Le manipulateur et les axes supplémentaires (option) effectuent un frei-nage proche de la trajectoire.
Remarque : cette catégorie de stop est désignée en tant que STOP 0 dans la documentation.
Catégorie de stop 1 Le manipulateur et les axes supplémentaires (option) effectuent un frei-nage conforme à la trajectoire. Les entraînements sont arrêtés et les freins sont serrés après 1 sec.
Remarque : cette catégorie de stop est désignée en tant que STOP 1 dans la documentation.
Catégorie de stop 2 Les entraînements ne sont pas arrêtés et les freins ne sont pas serrés. Le manipulateur et les axes supplémentaires (option) freinent avec une rampe de freinage normale.
Remarque : cette catégorie de stop est désignée en tant que STOP 2 dans la documentation.
Intégrateur de sys-tème(intégrateur d'installa-tion)
Les intégrateurs de système sont chargés d'intégrer le robot industriel dans une installation conformément à la sécurité et de le mettre ensuite en service.
T1 Mode de test "Manuel Vitesse Réduite" (<= 250 mm/s)
T2 Mode de test "Manuel Vitesse Elevée" (<= 250 mm/s autorisé)
Axe supplémentaire Axe de déplacement n'appartenant pas au manipulateur mais piloté par la commande du robot. Par ex. unité linéaire, table tournante/bascu-lante, Posiflex KUKA
23 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
24 / 75
KR C2 sr
Exploitant L'exploitant doit respecter les consignes et règlements concernant la sécurité des travailleurs. Il s'agit, par ex, des points suivants :
L'exploitant doit garantir la surveillance.
L'exploitant doit effectuer des formations à des intervalles déterminés.
Personnel Le personnel doit être informé du type et de l'étendue des travaux, ainsi que des dangers possibles, avant de commencer ces travaux. Les sessions d'in-formations doivent être répétées régulièrement. Des sessions d'information sont également nécessaires après chaque incident particulier ou après des modifications techniques.
Font partie du personnel :
l'intégrateur de système
les utilisateurs, divisés comme suit :
le personnel de mise en service, de maintenance et de service
l'opérateur
le personnel d'entretien
Intégrateur de
système
Le robot industriel est à intégrer par l'intégrateur de système dans l'installation en respectant la sécurité.
Responsabilités de l'intégrateur de système :
Mise en place du robot industriel
Connexion du robot industriel
Exécution de l'analyse des dangers
Utilisation des fonctions de sécurité et des dispositifs de protection néces-saires
Etablissement de la déclaration de conformité
Pose du sigle CE
Création du manuel pour l'installation
Utilisateur L'utilisateur doit remplir les conditions suivantes :
L'utilisateur doit être formé pour les tâches à exécuter.
Seul un personnel qualifié est en droit de travailler sur le robot industriel. Il s'agit de personnes en mesure d'évaluer les tâches à exécuter et de re-connaître les dangers potentiels par suite de leur formation, connais-sances, expériences et maîtrise des normes en vigueur correspondantes.
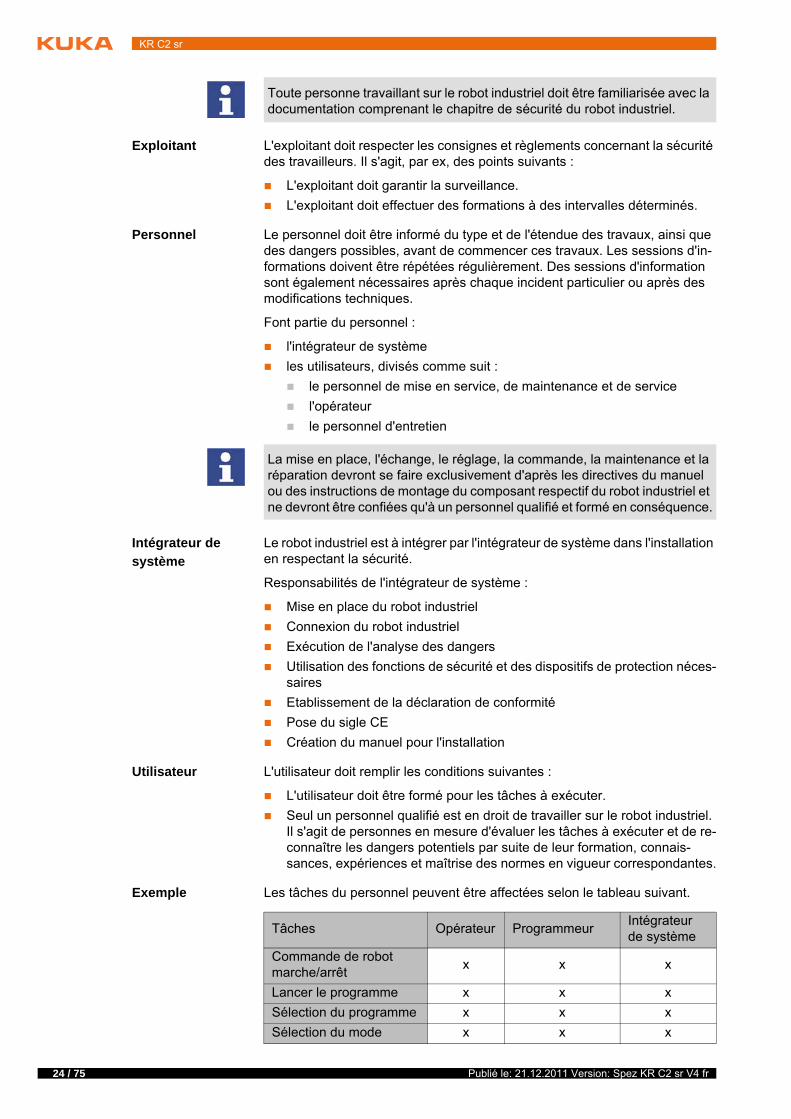
Exemple Les tâches du personnel peuvent être affectées selon le tableau suivant.
Toute personne travaillant sur le robot industriel doit être familiarisée avec la documentation comprenant le chapitre de sécurité du robot industriel.
La mise en place, l'échange, le réglage, la commande, la maintenance et la réparation devront se faire exclusivement d'après les directives du manuel ou des instructions de montage du composant respectif du robot industriel et ne devront être confiées qu'à un personnel qualifié et formé en conséquence.
Tâches Opérateur ProgrammeurIntégrateur de système
Commande de robot marche/arrêt
x x x
Lancer le programme x x x
Sélection du programme x x x
Sélection du mode x x x
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
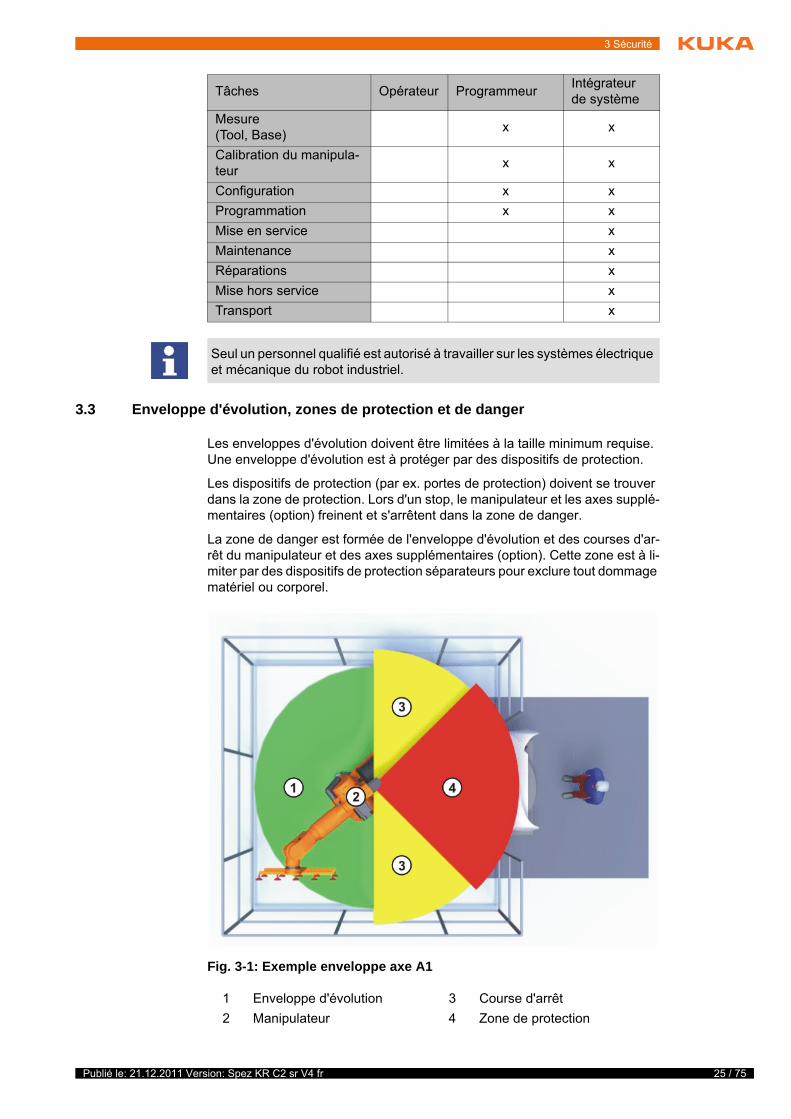
3.3 Enveloppe d'évolution, zones de protection et de danger
Les enveloppes d'évolution doivent être limitées à la taille minimum requise. Une enveloppe d'évolution est à protéger par des dispositifs de protection.
Les dispositifs de protection (par ex. portes de protection) doivent se trouver dans la zone de protection. Lors d'un stop, le manipulateur et les axes supplé-mentaires (option) freinent et s'arrêtent dans la zone de danger.
La zone de danger est formée de l'enveloppe d'évolution et des courses d'ar-rêt du manipulateur et des axes supplémentaires (option). Cette zone est à li-miter par des dispositifs de protection séparateurs pour exclure tout dommage matériel ou corporel.
Mesure(Tool, Base)
x x
Calibration du manipula-teur
x x
Configuration x x
Programmation x x
Mise en service x
Maintenance x
Réparations x
Mise hors service x
Transport x
Tâches Opérateur ProgrammeurIntégrateur de système
Seul un personnel qualifié est autorisé à travailler sur les systèmes électrique et mécanique du robot industriel.
Fig. 3-1: Exemple enveloppe axe A1
1 Enveloppe d'évolution 3 Course d'arrêt
2 Manipulateur 4 Zone de protection
25 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
26 / 75
KR C2 sr
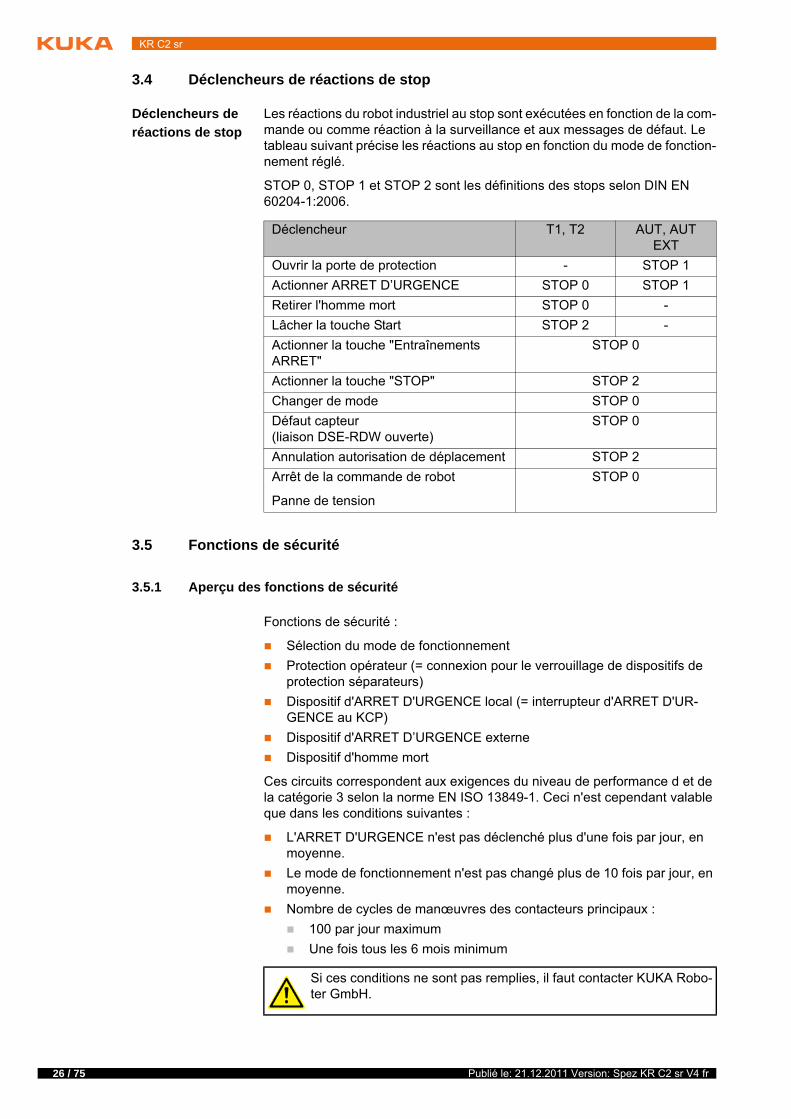
3.4 Déclencheurs de réactions de stop
Déclencheurs de
réactions de stop
Les réactions du robot industriel au stop sont exécutées en fonction de la com-mande ou comme réaction à la surveillance et aux messages de défaut. Le tableau suivant précise les réactions au stop en fonction du mode de fonction-nement réglé.
STOP 0, STOP 1 et STOP 2 sont les définitions des stops selon DIN EN 60204-1:2006.
3.5 Fonctions de sécurité
3.5.1 Aperçu des fonctions de sécurité
Fonctions de sécurité :
Sélection du mode de fonctionnement
Protection opérateur (= connexion pour le verrouillage de dispositifs de protection séparateurs)
Dispositif d'ARRET D'URGENCE local (= interrupteur d'ARRET D'UR-GENCE au KCP)
Dispositif d'ARRET D’URGENCE externe
Dispositif d'homme mort
Ces circuits correspondent aux exigences du niveau de performance d et de la catégorie 3 selon la norme EN ISO 13849-1. Ceci n'est cependant valable que dans les conditions suivantes :
L'ARRET D'URGENCE n'est pas déclenché plus d'une fois par jour, en moyenne.
Le mode de fonctionnement n'est pas changé plus de 10 fois par jour, en moyenne.
Nombre de cycles de manœuvres des contacteurs principaux :
100 par jour maximum
Une fois tous les 6 mois minimum
Déclencheur T1, T2 AUT, AUT EXT
Ouvrir la porte de protection - STOP 1
Actionner ARRET D’URGENCE STOP 0 STOP 1
Retirer l'homme mort STOP 0 -
Lâcher la touche Start STOP 2 -
Actionner la touche "Entraînements ARRET"
STOP 0
Actionner la touche "STOP" STOP 2
Changer de mode STOP 0
Défaut capteur (liaison DSE-RDW ouverte)
STOP 0
Annulation autorisation de déplacement STOP 2
Arrêt de la commande de robot
Panne de tension
STOP 0
Si ces conditions ne sont pas remplies, il faut contacter KUKA Robo-ter GmbH.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3.5.2 Logique de sécurité ESC
La fonction et le déclenchement des fonctions de sécurité électroniques sont surveillés par la logique de sécurité ESC.
La logique de sécurité ESC (Electronic Safety Circuit ou Circuit de sécurité électronique) est un système de sécurité à 2 canaux à base de processeurs. Cette logique surveille en permanence tous les composants de sécurité connectés. En cas de panne ou d'interruption du circuit de sécurité, l'alimen-tation en tension arrête directement les entraînements pour obtenir un arrêt du robot industriel.
La réaction de stop déclenchée par la logique de sécurité ESC dépend du mode de fonctionnement dans lequel le robot industriel est exploité.
La logique de sécurité ESC surveille les entrées suivantes :
Protection opérateur
ARRET D'URGENCE local (= interrupteur d'ARRET D'URGENCE au KCP)
ARRET D’URGENCE externe
Dispositif d'homme mort
Entraînements ARRET
Entraînements MARCHE
Modes de fonctionnement
Entrées qualifiantes
La logique de sécurité ESC surveille les sorties suivantes :
Mode
ARRET D'URGENCE local
3.5.3 Sélecteur des modes
Le robot industriel peut être exploité dans les modes suivants :
Manuel Vitesse Réduite (T1)
Manuel Vitesse Elevée (T2)
Automatique (AUT)
Automatique Externe (AUT EXT)
Le mode est sélectionné avec le sélecteur de mode au KCP. Le sélecteur est commandé avec une clé qui peut être retirée. Sans clé, le sélecteur est ver-rouillé et le mode ne peut plus être changé.
Si le mode est changé lors du service, les entraînements sont arrêtés immé-diatement. Le manipulateur et les axes supplémentaires (option) s'arrêtent avec un STOP 0.
Sans fonctions de sécurité et dispositifs de protec-tion opérationnels, le robot industriel peut être la
cause d'un dommage matériel ou corporel. Si des fonctions de sécurité ou des dispositifs de protection sont désactivés ou démontés, il est interdit d'ex-ploiter le robot industriel.
27 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
28 / 75
KR C2 sr
3.5.4 Protection opérateur
L'entrée pour la protection opérateur permet le verrouillage des dispositifs de protection séparateurs. Les dispositifs de protection, comme par ex. les portes de protection, peuvent être connectés à cette entrée à 2 canaux. Un mode au-tomatique est impossible si aucun composant n'est connecté à cette entrée. En modes de test "Manuel, Vitesse Réduite" (T1) et "Manuel, Vitesse Elevée" (T2), la protection opérateur est inactive.
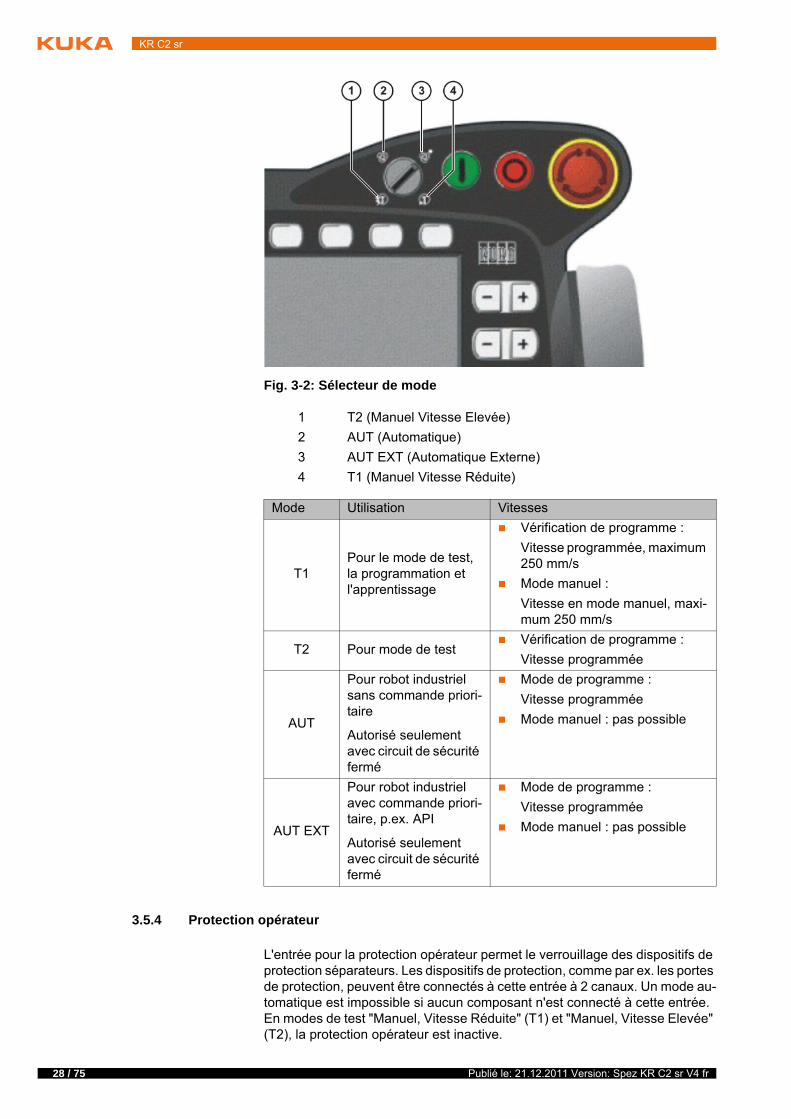
Fig. 3-2: Sélecteur de mode
1 T2 (Manuel Vitesse Elevée)
2 AUT (Automatique)
3 AUT EXT (Automatique Externe)
4 T1 (Manuel Vitesse Réduite)
Mode Utilisation Vitesses
T1Pour le mode de test, la programmation et l'apprentissage
Vérification de programme :
Vitesse programmée, maximum 250 mm/s
Mode manuel :
Vitesse en mode manuel, maxi-mum 250 mm/s
T2 Pour mode de test Vérification de programme :
Vitesse programmée
AUT
Pour robot industriel sans commande priori-taire
Autorisé seulement avec circuit de sécurité fermé
Mode de programme :
Vitesse programmée
Mode manuel : pas possible
AUT EXT
Pour robot industriel avec commande priori-taire, p.ex. API
Autorisé seulement avec circuit de sécurité fermé
Mode de programme :
Vitesse programmée
Mode manuel : pas possible
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
En cas de perte de signal lors du mode automatique (par ex. porte de protec-tion est ouverte), le manipulateur et les axes supplémentaires (option) s'arrê-tent avec un STOP 1. Si le signal est appliqué à l'entrée, le mode automatique peut être poursuivi.
La protection opérateur peut être connectée à la commande du robot via l'in-terface périphérie.
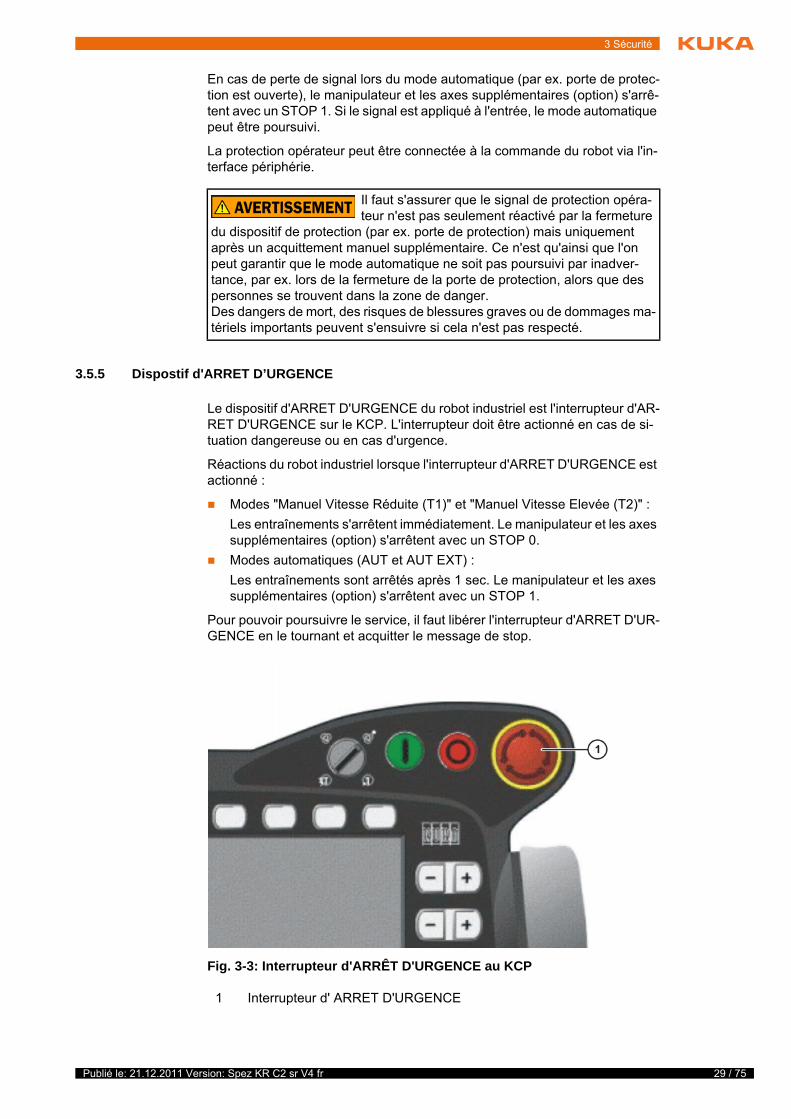
3.5.5 Dispostif d'ARRET D’URGENCE
Le dispositif d'ARRET D'URGENCE du robot industriel est l'interrupteur d'AR-RET D'URGENCE sur le KCP. L'interrupteur doit être actionné en cas de si-tuation dangereuse ou en cas d'urgence.
Réactions du robot industriel lorsque l'interrupteur d'ARRET D'URGENCE est actionné :
Modes "Manuel Vitesse Réduite (T1)" et "Manuel Vitesse Elevée (T2)" :
Les entraînements s'arrêtent immédiatement. Le manipulateur et les axes supplémentaires (option) s'arrêtent avec un STOP 0.
Modes automatiques (AUT et AUT EXT) :
Les entraînements sont arrêtés après 1 sec. Le manipulateur et les axes supplémentaires (option) s'arrêtent avec un STOP 1.
Pour pouvoir poursuivre le service, il faut libérer l'interrupteur d'ARRET D'UR-GENCE en le tournant et acquitter le message de stop.
Il faut s'assurer que le signal de protection opéra-teur n'est pas seulement réactivé par la fermeture
du dispositif de protection (par ex. porte de protection) mais uniquement après un acquittement manuel supplémentaire. Ce n'est qu'ainsi que l'on peut garantir que le mode automatique ne soit pas poursuivi par inadver-tance, par ex. lors de la fermeture de la porte de protection, alors que des personnes se trouvent dans la zone de danger.Des dangers de mort, des risques de blessures graves ou de dommages ma-tériels importants peuvent s'ensuivre si cela n'est pas respecté.
Fig. 3-3: Interrupteur d'ARRÊT D'URGENCE au KCP
1 Interrupteur d' ARRET D'URGENCE
29 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
30 / 75
KR C2 sr
3.5.6 Dispositif d'ARRET D'URGENCE externe
Des dispositifs d'ARRET D'URGENCE doivent être disponibles à chaque sta-tion pouvant déclencher un déplacement du robot ou une autre situation sus-ceptible de provoquer des dangers. L'intégrateur de système doit garantir cela.
Un dispositif d'ARRET D'URGENCE externe au moins doit être installé. Ceci permet de disposer d'un dispositif d'ARRET D'URGENCE même lorsque le KCP est déconnecté.
Les dispositifs d'ARRET D’URGENCE externes sont connectés via l'interface client. Les dispositifs d'ARRET D’URGENCE externes ne sont pas compris dans la livraison du robot industriel.
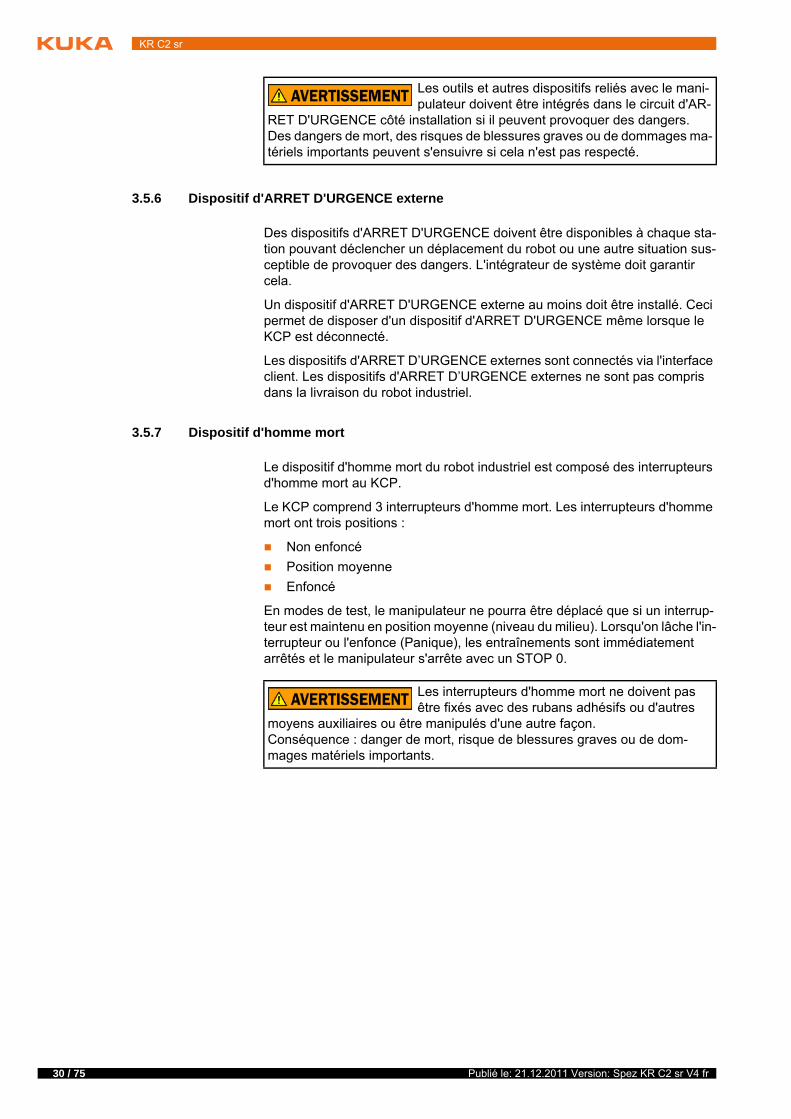
3.5.7 Dispositif d'homme mort
Le dispositif d'homme mort du robot industriel est composé des interrupteurs d'homme mort au KCP.
Le KCP comprend 3 interrupteurs d'homme mort. Les interrupteurs d'homme mort ont trois positions :
Non enfoncé
Position moyenne
Enfoncé
En modes de test, le manipulateur ne pourra être déplacé que si un interrup-teur est maintenu en position moyenne (niveau du milieu). Lorsqu'on lâche l'in-terrupteur ou l'enfonce (Panique), les entraînements sont immédiatement arrêtés et le manipulateur s'arrête avec un STOP 0.
Les outils et autres dispositifs reliés avec le mani-pulateur doivent être intégrés dans le circuit d'AR-
RET D'URGENCE côté installation si il peuvent provoquer des dangers.Des dangers de mort, des risques de blessures graves ou de dommages ma-tériels importants peuvent s'ensuivre si cela n'est pas respecté.
Les interrupteurs d'homme mort ne doivent pas être fixés avec des rubans adhésifs ou d'autres
moyens auxiliaires ou être manipulés d'une autre façon.Conséquence : danger de mort, risque de blessures graves ou de dom-mages matériels importants.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3.6 Equipement de protection supplémentaire
3.6.1 Mode pas à pas
La commande de robot ne peut traiter un programme que pas à pas dans les modes "Manuel, Vitesse Réduite" (T1) et "Manuel, Vitesse Elevée" (T2). Cela signifie qu'un interrupteur d'homme mort et la touche Start doivent être main-tenus enfoncés pour pouvoir traiter un programme.
Lorsque l'on lâche ou enfonce complètement (Position Panique) l'interrupteur, les entraînements sont immédiatement arrêtés et le manipulateur ainsi que les axes supplémentaires (option) s'arrêtent avec un STOP 0.
Si l'on ne lâche que la touche de Start, cela provoque un arrêt du robot indus-triel avec un STOP 2.
3.6.2 Butées logicielles
Les enveloppes de tous les axes du manipulateur et du positionneur sont limi-tées par des butées logicielles réglables. Ces butées logicielles doivent seu-lement protéger la machine. Il faut les régler de telle manière que le manipulateur / le positionneur ne puisse accoster les butées mécaniques.
Les butées logicielles sont réglées lors de la mise en service d'un robot indus-triel.
Fig. 3-4: Interrupteur d'homme mort au KCP
1 - 3 Interrupteur d’homme mort
Pour tout complément d'information à ce sujet, veuillez consulter le manuel de programmation et de commande.
31 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
32 / 75
KR C2 sr
3.6.3 Identifications au robot industriel
Toutes les plaques, remarques, symboles et repères font partie du système de sécurité du robot industriel. Il est interdit de les enlever ou de les modifier.
Identifications au robot industriel :
Plaques de puissance
Avertissements
Symboles relatifs à la sécurité
Plaques indicatrices
Repères des câbles
Plaques signalétiques
3.6.4 Dispositifs de protection externes
Dispositifs de
protection
Eviter l'entrée de personnes dans la zone de danger du manipulateur à l'aide de dispositifs de protection.
Les dispositifs de protection séparateurs doivent remplir les conditions sui-vantes :
Ils correspondent aux exigences de la norme EN 953.
Ils empêchent l'entrée de personnes dans la zone de danger et ne peuvent pas être franchis facilement.
Ils sont fixés de façon fiable et peuvent résister aux forces prévisibles ap-paraissant lors de l'exploitation ou provenant de l'environnement.
Ils ne représentent pas de danger et ne peuvent pas provoquer de danger.
L'écart minimum avec la zone de danger est à respecter.
Les portes de protection (portes de maintenance) doivent remplir les condi-tions suivantes :
Leur nombre est limité au minimum nécessaire.
Les verrouillages (par ex. les interrupteurs de portes de protection) sont reliés à l'entrée protection opérateur de la commande du robot par les ap-pareils de commutation des portes de protection ou l'API de sécurité.
Les appareils de commutation, les interrupteurs et le type de circuit cor-respondent aux exigences de la catégorie 3 selon la norme EN 954-1.
En fonction du risque : la porte de protection est bloquée également avec une fermeture ne permettant l'ouverture de la porte de protection que lorsque le manipulateur est arrêté de façon fiable.
Le bouton pour acquitter la porte de protection est installé à l'extérieur de la zone définie par les dispositifs de protection.
Autres dispositifs
de protection
Les autres dispositifs de protection doivent être intégrés dans l'installation conformément aux normes et directives en vigueur.
Pour tout complément d'information à ce sujet, veuillez consulter les carac-téristiques techniques dans le manuel ou les instructions de montage des composants du robot industriel.
Pour tout complément d'information à ce sujet, veuillez consulter les normes et directives correspondantes. La norme EN 953 en fait éga-lement partie.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3.7 Aperçu des modes de fonctionnement et des fonctions de protection
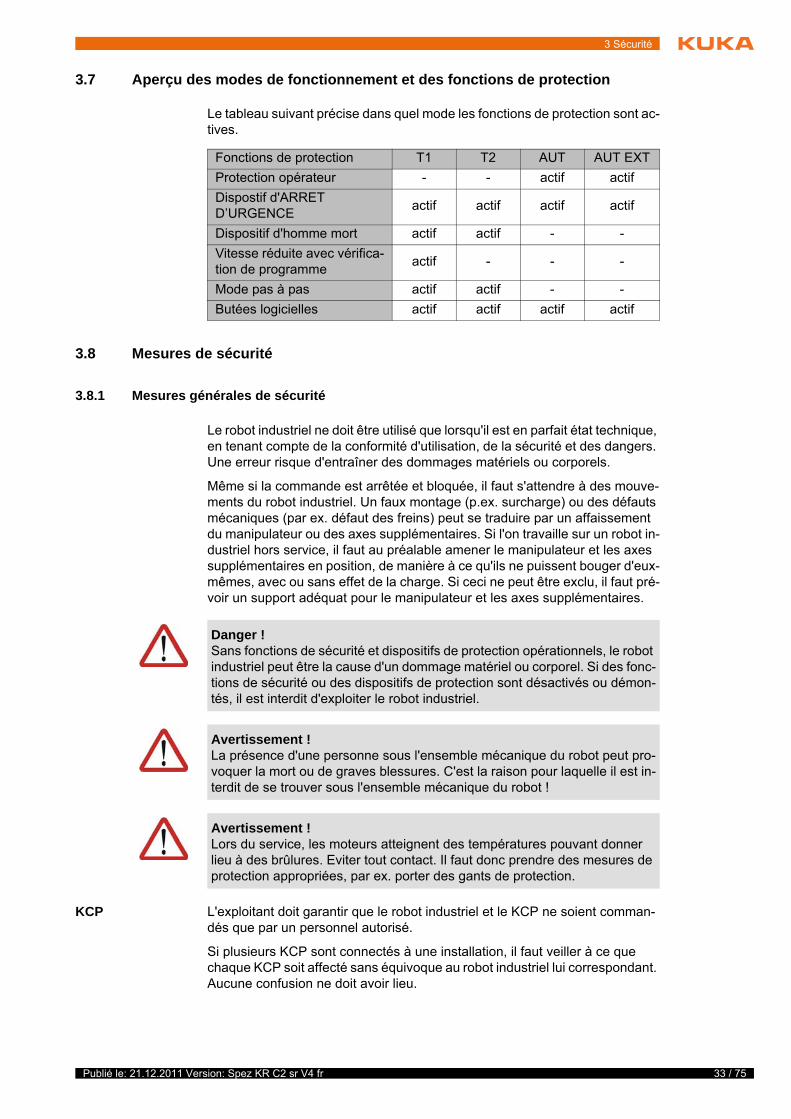
Le tableau suivant précise dans quel mode les fonctions de protection sont ac-tives.
3.8 Mesures de sécurité
3.8.1 Mesures générales de sécurité
Le robot industriel ne doit être utilisé que lorsqu'il est en parfait état technique, en tenant compte de la conformité d'utilisation, de la sécurité et des dangers. Une erreur risque d'entraîner des dommages matériels ou corporels.
Même si la commande est arrêtée et bloquée, il faut s'attendre à des mouve-ments du robot industriel. Un faux montage (p.ex. surcharge) ou des défauts mécaniques (par ex. défaut des freins) peut se traduire par un affaissement du manipulateur ou des axes supplémentaires. Si l'on travaille sur un robot in-dustriel hors service, il faut au préalable amener le manipulateur et les axes supplémentaires en position, de manière à ce qu'ils ne puissent bouger d'eux-mêmes, avec ou sans effet de la charge. Si ceci ne peut être exclu, il faut pré-voir un support adéquat pour le manipulateur et les axes supplémentaires.
KCP L'exploitant doit garantir que le robot industriel et le KCP ne soient comman-dés que par un personnel autorisé.
Si plusieurs KCP sont connectés à une installation, il faut veiller à ce que chaque KCP soit affecté sans équivoque au robot industriel lui correspondant. Aucune confusion ne doit avoir lieu.
Fonctions de protection T1 T2 AUT AUT EXT
Protection opérateur - - actif actif
Dispostif d'ARRET D’URGENCE
actif actif actif actif
Dispositif d'homme mort actif actif - -
Vitesse réduite avec vérifica-tion de programme
actif - - -
Mode pas à pas actif actif - -
Butées logicielles actif actif actif actif
Danger !Sans fonctions de sécurité et dispositifs de protection opérationnels, le robot industriel peut être la cause d'un dommage matériel ou corporel. Si des fonc-tions de sécurité ou des dispositifs de protection sont désactivés ou démon-tés, il est interdit d'exploiter le robot industriel.
Avertissement !La présence d'une personne sous l'ensemble mécanique du robot peut pro-voquer la mort ou de graves blessures. C'est la raison pour laquelle il est in-terdit de se trouver sous l'ensemble mécanique du robot !
Avertissement !Lors du service, les moteurs atteignent des températures pouvant donner lieu à des brûlures. Eviter tout contact. Il faut donc prendre des mesures de protection appropriées, par ex. porter des gants de protection.
33 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
34 / 75
KR C2 sr
Clavier externe,
souris externe
Un clavier externe et/ou une souris externe ne doivent être utilisés que dans les conditions suivantes :
Des travaux de mise en service ou de maintenance sont effectués.
Les entraînements sont arrêtés.
Aucune personne ne se trouve dans la zone de danger.
Le KCP ne doit pas être utilisé tant qu'un clavier et/ou une souris externes sont connectés.
Il faudra retirer le clavier externe et/ou la souris externe dès que les travaux de mise en service ou de maintenance sont achevés ou lorsque le KCP est connecté.
Pannes En cas de panne du robot industriel, procéder comme suit :
Arrêter la commande du robot pour la protéger contre toute remise en ser-vice interdite (p. ex. avec un cadenas).
Signaler la panne par une plaque avec la remarque adéquate.
Tenir un journal des défauts et pannes.
Eliminer la panne et contrôler le fonctionnement.
Modifications Après toute modification du robot industriel, il faudra vérifier si le niveau de sé-curité nécessaire est garanti. Pour ce contrôle, il faut respecter les règlements concernant la sécurité des travailleurs du pays ou de la région en question. De plus, tester tous les circuits électriques de sécurité quant à leur fonctionne-ment fiable.
Tout nouveau programme ou programme modifié est d'abord à tester en mode "Manuel Vitesse Réduite" (T1).
Si des modifications ont été effectuées sur le robot industriel, les programmes existants doivent tout d'abord être testés en mode "Manuel Vitesse Réduite" (T1). Ceci est valable pour tous les composants du robot industriel et inclut également les modifications effectuées sur le logiciel et les réglages de confi-guration.
3.8.2 Transport
Manipulateur La position prescrite pour le transport du manipulateur doit être observée. Le transport doit se faire conformément au manuel et aux instructions de mon-tage du manipulateur.
Commande de
robot
La commande de robot doit être transportée et montée verticalement. Tout choc ou toute secousse lors du transport est à éviter pour exclure un endom-magement de la commande de robot.
Le transport doit se faire conformément au manuel et aux instructions de mon-tage de la commande de robot.
Axe supplémen-
taire (option)
La position prescrite pour le transport de l'axe supplémentaire (par ex. unité linéaire, table tournante/basculante, positionneur KUKA) doit être observée. Le transport doit se faire conformément au manuel et aux instructions de mon-tage de l'axe supplémentaire.
Avertissement !L'exploitant doit garantir que les KCP désaccouplés soient immédiatement retirés de l'installation et gardés hors de vue et de portée du personnel tra-vaillant sur le robot industriel. Cela sert à éviter des confusions entre les dis-positifs d'ARRET D'URGENCE actifs ou inactifs.Des dangers de mort, des risques de blessures graves ou de dommages ma-tériels importants peuvent s'ensuivre si cela n'est pas respecté.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3.8.3 Mise et remise en service
Avant la première mise en service d'installations et d'appareils, il faut avoir ef-fectué un contrôle garantissant que les installations et appareils soient com-plets et fonctionnels, qu'il peuvent être exploités de façon fiable et que d'éventuelles pannes puissent être reconnues.
Pour ce contrôle, il faut respecter les règlements concernant la sécurité des travailleurs du pays ou de la région en question. De plus, tester tous les cir-cuits électriques de sécurité quant à leur fonctionnement fiable.
Contrôle de la
fonction
Avant la mise et la remise en service, les contrôles suivants doivent être effec-tués :
Contrôle général :
Il faut s'assurer des points suivants :
Le robot industriel est mis en place et fixé de façon correcte conformément aux indications de la documentation.
Aucun corps étranger, pièce défectueuse ou lâche ne se trouve sur le ro-bot industriel.
Tous les dispositifs de protection nécessaires sont installés correctement et opérationnels.
Les valeurs de connexion du robot industriel concordent avec la tension secteur locale.
La terre et le câble de compensation du potentiel ont une longueur suffi-sante et sont correctement connectés.
Les câbles de connexion sont correctement connectés et les connecteurs sont verrouillés.
Contrôle des circuits de sécurité :
Les mots de passe pour l'enregistrement dans le logiciel KUKA Sys-tem Software en tant qu'expert ou administrateur doivent être modi-fiés avant la mise en service et ne doivent être communiqués qu'au
personnel autorisé.
La commande de robot est préconfigurée pour le robot industriel correspondant. Si des câbles sont
échangés, le manipulateur et les axes supplémentaires (option) peuvent contenir des données erronées et causer ainsi des dommages matériels ou corporels. Si l'installation est composée de plusieurs manipulateurs, les câbles de liaison doivent toujours être connectés au manipulateur et à la commande de robot correspondante.
Si des composants supplémentaires (par ex. des câbles) non compris dans la fourniture KUKA Roboter GmbH sont intégrés dans le robot industriel, l'exploitant devra garantir que ces composants n'entravent
ou ne désactivent aucune fonction de sécurité.
Si la température intérieure de l'armoire de la com-mande de robot diffère trop de la température am-
biante, de l'eau de condensation peut se former qui pourrait endommager le système électrique. La commande de robot ne pourra être mise en service que quand la température intérieure de l'armoire se sera adaptée à la tem-pérature ambiante.
35 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
36 / 75
KR C2 sr
Pour les circuits de sécurité suivants, il faut effectuer un test de fonction afin de s'assurer qu'ils travaillent correctement :
Dispositif d'ARRET D'URGENCE local (= interrupteur d'ARRET D'UR-GENCE au KCP)
Dispositif d'ARRET D'URGENCE externe (entrée et sortie)
Dispositif d'homme mort (dans les modes de test)
Protection opérateur (dans les modes automatiques)
Entrées qualifiantes (si connectées)
Toutes les autres entrées et sorties utilisées importantes pour la sécurité
Contrôler la commande de la vitesse réduite :
Lors de ce contrôle, procéder comme suit :
1. Programmer une trajectoire droite et programmer la vitesse maximum possible.
2. Déterminer la longueur de la trajectoire.
3. Parcourir la trajectoire en mode T1 avec un override de 100 % et mesurer ce faisant la durée du parcours avec un chronomètre.
4. Calculer la vitesse à partir de la longueur de la trajectoire et de la durée du parcours mesurée.
La commande de la vitesse réduite travaille de façon correcte si les résultats suivants sont atteints :
La vitesse ainsi obtenue ne dépasse pas 250 mm/s.
Le robot s'est déplacé sur la trajectoire programmée (c'est-à-dire de façon droite et sans détours).
Paramètres
machine
S'assurer que la plaque signalétique de la commande de robot présente des paramètres machine identiques à celles de la déclaration de montage. Les pa-ramètres machine sur la plaque signalétique du manipulateur et des axes sup-plémentaires (option) doivent être présents lors de la mise en service.
3.8.4 Antivirus et sécurité du réseau
L'exploitant du robot industriel est responsable de la protection du logiciel par un antivirus toujours mis à jour. Si la commande du robot est intégrée dans un réseau accédant au réseau d'entreprise ou à la toile, il est recommandé de le doter d'un pare-feu.
Lorsque la trajectoire est parcourue, aucune per-sonne ne doit se trouver dans la zone de danger.
Ceci provoque un risque de blessures graves ou un danger de mort.
Il est interdit de déplacer le robot industriel si les faux paramètres machine sont chargés ! Si cela
n'est pas respecté, des risques de mort, de blessures graves ou de dom-mages matériels importants peuvent s'ensuivre. Les paramètres machine corrects doivent être chargés.
Pour une application optimale de nos produits, nous recommandons à nos clients de garder leur antivirus à jour. Pour tout complément d'information sur les mises à jour, visitez www.kuka.com
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
3.8.5 Mode manuel
Le mode manuel est le mode pour les travaux de réglage. Les travaux de ré-glage sont tous les travaux devant être exécutés sur le robot industriel pour pouvoir commencer le mode automatique. Font partie des travaux de réglage :
Mode pas à pas
Apprentissage
Programmation
Vérification de programme
Lors du mode manuel, il faut respecter les points suivants :
Si les entraînements ne sont plus nécessaires, il faut les arrêter pour éviter que le manipulateur ou les axes supplémentaires (option) ne soient dépla-cés par inadvertance.
Tout nouveau programme ou programme modifié est d'abord à tester en mode "Manuel Vitesse Réduite" (T1).
Un outil, le manipulateur ou des axes supplémentaires (option) ne doivent jamais entrer en contact avec la grille de protection ou dépasser la grille.
Les composants, outils ou autres objets ne doivent être ni coincés, ni tom-ber, ni provoquer des courts-circuits par suite d'un mouvement du robot in-dustriel.
Tous les travaux de réglage doivent être effectués le plus loin possible hors de la zone limitée par des dispositifs de protection.
Si les travaux de réglage doivent être effectués à l'intérieur de la zone limitée par des dispositions de protection, les points suivants doivent être respectés.
En mode Manuel Vitesse Réduite (T1) :
Si cela peut être évité, aucune autre personne ne doit se trouver dans la zone limitée par des dispositifs de protection.
Si il est nécessaire que plusieurs personnes se trouvent dans la zone limi-tée par des dispositifs de protection, les points suivants doivent être res-pectés :
Chaque personne doit disposer d'un dispositif d'homme mort.
Toutes les personnes doivent avoir une vue dégagée sur le robot in-dustriel.
Toutes les personnes doivent pouvoir avoir un contact visuel perma-nent.
L'opérateur doit prendre une position dans laquelle il peut visualiser la zone de danger et éviter un danger éventuel.
En mode Manuel Vitesse Elevée (T2) :
Ce mode ne doit être utilisé que si l'application exige un test avec une vi-tesse supérieure à celle du mode "Manuel Vitesse Réduite".
L'apprentissage et la programmation ne sont pas autorisés dans ce mode.
L'opérateur doit s'assurer que les dispositifs d'homme mort sont en état de fonctionner avant de commencer le test.
L'opérateur doit prendre position hors de la zone de danger.
Aucune autre personne ne doit se trouver dans la zone limitée par des dis-positifs de protection. L'opérateur doit garantir cela.
3.8.6 Simulation
Les programmes de simulation ne reproduisent pas parfaitement la réalité. Les programmes de robots créés dans des programmes de simulation sont à
37 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
38 / 75
KR C2 sr
tester dans l'installation en mode Manuel Vitesse Réduite (T1). Le cas échéant, il faut corriger le programme.
3.8.7 Mode automatique
Le mode automatique n'est autorisé que si les mesures de sécurité suivantes sont remplies :
Tous les dispositifs de sécurité et de protection sont présents et fonction-nent.
Aucune personne ne se trouve dans l'installation.
Les procédures prescrites sont respectées.
Si le manipulateur ou un axe supplémentaire (option) s'arrête sans raison évi-dente, on ne pourra pénétrer dans la zone de danger qu'après avoir déclenché un ARRET D'URGENCE.
3.8.8 Maintenance et réparations
Après les travaux de maintenance et de réparations, il faudra vérifier si le ni-veau de sécurité nécessaire est garanti. Pour ce contrôle, il faut respecter les règlements concernant la sécurité des travailleurs du pays ou de la région en question. De plus, tester tous les circuits électriques de sécurité quant à leur fonctionnement fiable.
La maintenance et la réparation doivent garantir un état fiable et sûr du robot ou son rétablissement après une panne. La réparation comprend le dépistage du défaut et sa réparation.
Mesures de sécurité lorsqu'on travaille sur le robot industriel :
Exécuter les opérations hors de la zone de danger du robot. S'il faut tra-vailler dans la zone de danger, l'exploitant doit définir des mesures de pro-tection supplémentaires pour exclure tout dommage corporel.
Mettre le robot industriel hors service et le bloquer pour éviter toute remise en service (p.ex. avec un cadenas). S'il faut travailler lorsque la com-mande de robot est en service, l'exploitant doit définir des mesures de pro-tection supplémentaires pour exclure tout dommage corporel.
S'il faut travailler lorsque la commande de robot est en service, les opéra-tions ne peuvent être effectuées qu'en mode T1.
Signaler les opérations par une plaque sur l'installation. Cette plaque doit rester en place même lorsque le travail est interrompu.
Les équipements d'ARRET D'URGENCE doivent rester actifs. S'il faut dé-sactiver des fonctions de sécurité ou des dispositifs de protection par suite des travaux de maintenance ou de réparation, il faut rensuite à nouveau rétablir immédiatement la protection.
Un composant défectueux est à remplacer par un nouveau composant ayant le même numéro d'article ou par un composant signalé comme équivalent par KUKA Roboter GmbH.
Les règles du manuel sont à respecter pour exécuter les travaux de nettoyage et d'entretien.
Commande de
robot
Même si la commande du robot est hors service, des pièces connectées à la périphérie peuvent être sous tension. Les sources externes doivent donc être arrêtées si l'on travaille sur la commande du robot.
Les directives CRE sont à respecter lorsqu'on travaille sur les composants de la commande du robot.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
Une fois la commande de robot arrêtée, différents composants peuvent se trouver sous une tension de plus de 50 V (jusqu'à 600 V) pendant plusieurs minutes. Il est donc interdit de travailler sur le robot industriel pendant ce temps pour exclure tout risque de blessures très dangereuses.
La pénétration d'eau et de poussière dans la commande du robot doit être évi-tée.
Matières dange-
reuses
Mesures de sécurité lors de la manipulation des matières dangereuses :
Eviter tout contact intensif prolongé ou répété avec la peau.
Eviter si possible d’inhaler les vapeurs ou les brouillards d’huile.
Nettoyer et soigner votre peau.
3.8.9 Mise hors service, stockage et élimination
La mise hors service, le stockage et l'élimination du robot industriel doivent ré-pondre aux législations, normes et directives en vigueur dans le pays en ques-tion.
3.8.10 Mesures de sécurité pour "Single Point of Control"
Aperçu Si certains composants sont utilisés au robot industriel, des mesures de sécu-rité doivent être effectuées afin de réaliser complètement le principe du "Single Point of Control".
Composants :
Interpréteur Submit
API
Serveur OPC
Outils de télécommande
Clavier externe/souris
Comme seul l'intégrateur de système connaît les états sûrs des actuateurs à la périphérie de la commande du robot, il lui incombe de faire passer ces ac-tuateurs dans un état sûr en cas d'ARRET D'URGENCE par ex.
Clavier externe/
souris
Ces composants permettent de modifier des programmes, des sorties ou d'autres paramètres de la commande du robot sans que les personnes se trouvant dans l'installation s'en rendent nécessairement compte.
Mesures de sécurité :
N'utiliser qu'une unité de commande à chaque commande de robot.
Il convient de retirer le clavier et la souris de la commande du robot avant de travailler dans l'installation avec le KCP.
Serveur OPC et
outils de télécom-
mande
Ces composants permettent de modifier des programmes, des sorties ou d'autres paramètres de la commande du robot via des accès en écriture, sans que les personnes se trouvant dans l'installation s'en rendent nécessairement compte.
Pour garantir une application sans danger de nos produits, nous re-commandons à nos clients de demander les fiches techniques actua-lisées des fabricants de matières dangereuses.
L'exécution d'autres mesures de sécurité peut être nécessaire. Il convient d'en décider en fonction du cas d'application. Ceci incombe à l'intégrateur de système, au programmeur ou à l'exploitant de l'ins-
tallation.
39 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
40 / 75
KR C2 sr
Mesures de sécurité :
Ces composants sont exclusivement conçus par KUKA pour le diagnostic et la visualisation.
Les programmes, les sorties ou d'autres paramètres de la commande du robot ne doivent pas être modifiés avec ces composants.
Interpréteur
Submit, API
Si, avec l'interpréteur Submit ou l'API, des mouvements (par ex. des entraîne-ments ou des préhenseurs) sont activés via le système E/S et si ils ne sont pas protégés par ailleurs, alors cette activation a également lieu en mode T1 et T2 ou durant un ARRET D'URGENCE.
Si, avec l'interpréteur Submit ou l'API, des variables ayant des effets sur les déplacements du robot (par ex. Override) sont modifiées, alors ceci a égale-ment lieu en mode T1 et T2 ou durant un ARRET D'URGENCE.
Mesures de sécurité :
Ne pas modifier les signaux et les variables concernant la sécurité (par ex. mode, ARRET D'URGENCE, contact de porte de protection) avec l'inter-préteur Submit ou l'API.
Si des modifications sont cependant nécessaires, tous les signaux et va-riables concernant la sécurité doivent être reliés de façon à ne pas pouvoir être mis dans un état dangereux pour la sécurité par l'interpréteur Submit ou l'API.
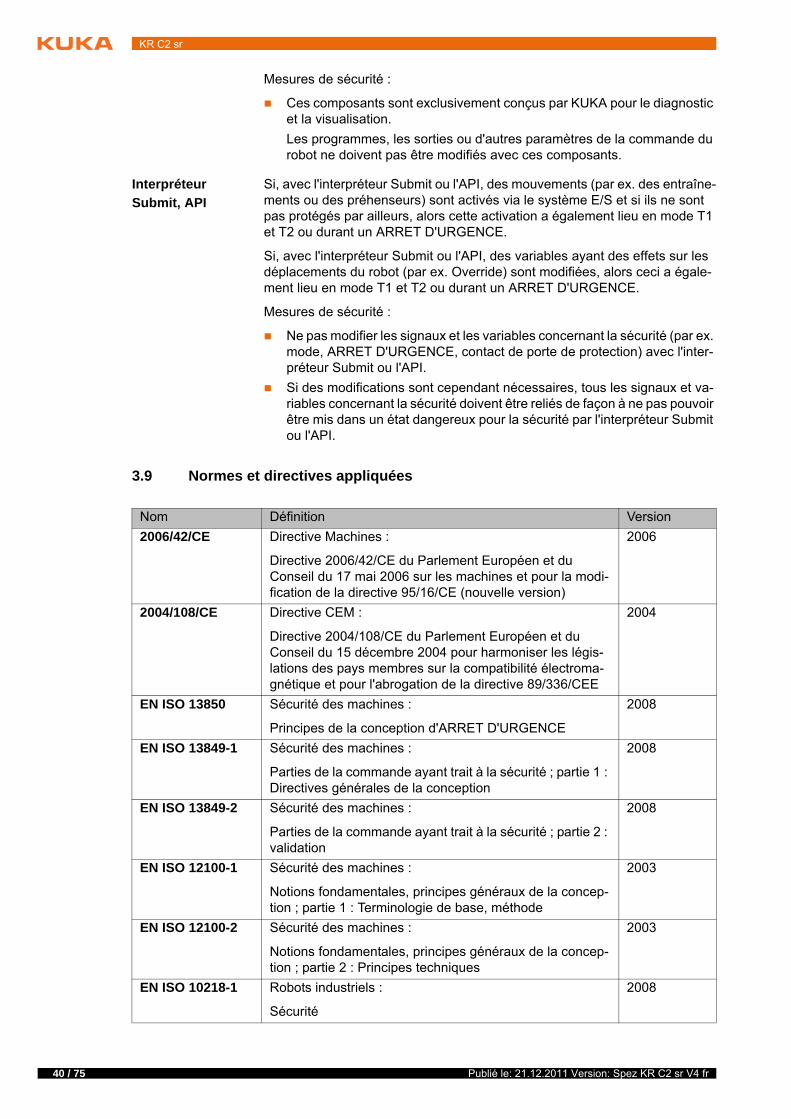
3.9 Normes et directives appliquées
Nom Définition Version
2006/42/CE Directive Machines :
Directive 2006/42/CE du Parlement Européen et du Conseil du 17 mai 2006 sur les machines et pour la modi-fication de la directive 95/16/CE (nouvelle version)
2006
2004/108/CE Directive CEM :
Directive 2004/108/CE du Parlement Européen et du Conseil du 15 décembre 2004 pour harmoniser les légis-lations des pays membres sur la compatibilité électroma-gnétique et pour l'abrogation de la directive 89/336/CEE
2004
EN ISO 13850 Sécurité des machines :
Principes de la conception d'ARRET D'URGENCE
2008
EN ISO 13849-1 Sécurité des machines :
Parties de la commande ayant trait à la sécurité ; partie 1 : Directives générales de la conception
2008
EN ISO 13849-2 Sécurité des machines :
Parties de la commande ayant trait à la sécurité ; partie 2 : validation
2008
EN ISO 12100-1 Sécurité des machines :
Notions fondamentales, principes généraux de la concep-tion ; partie 1 : Terminologie de base, méthode
2003
EN ISO 12100-2 Sécurité des machines :
Notions fondamentales, principes généraux de la concep-tion ; partie 2 : Principes techniques
2003
EN ISO 10218-1 Robots industriels :
Sécurité
2008
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
3 Sécurité
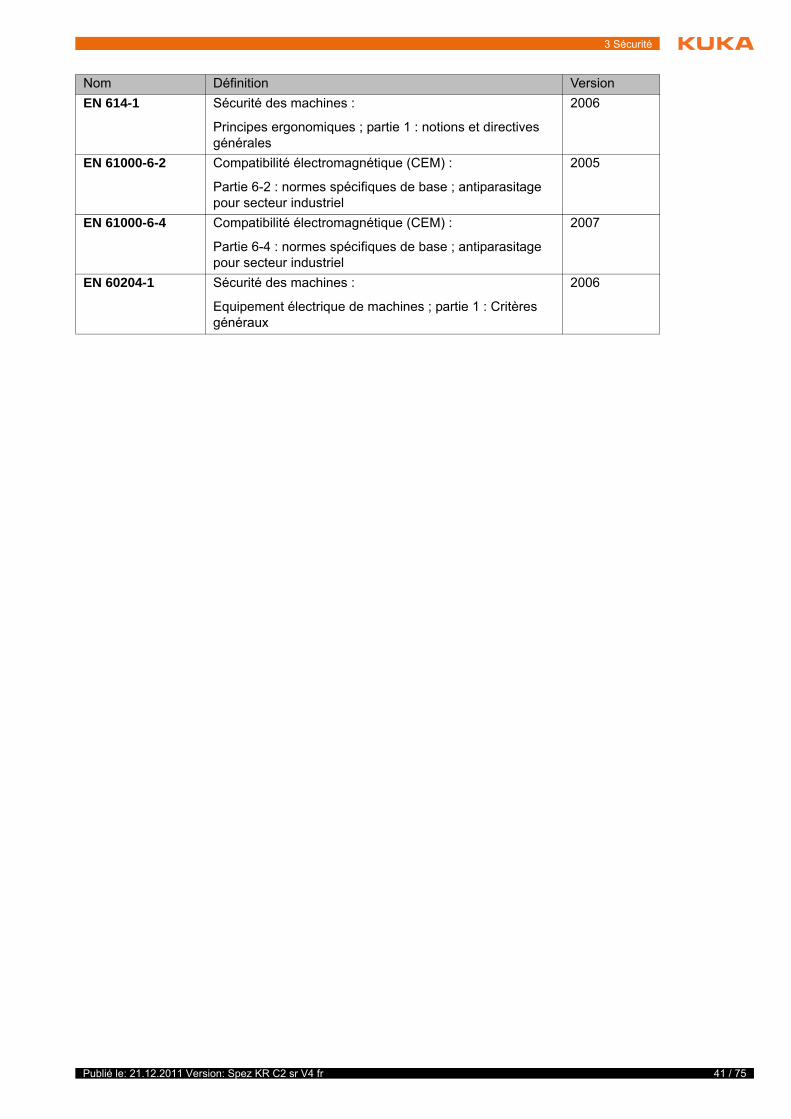
EN 614-1 Sécurité des machines :
Principes ergonomiques ; partie 1 : notions et directives générales
2006
EN 61000-6-2 Compatibilité électromagnétique (CEM) :
Partie 6-2 : normes spécifiques de base ; antiparasitage pour secteur industriel
2005
EN 61000-6-4 Compatibilité électromagnétique (CEM) :
Partie 6-4 : normes spécifiques de base ; antiparasitage pour secteur industriel
2007
EN 60204-1 Sécurité des machines :
Equipement électrique de machines ; partie 1 : Critères généraux
2006
Nom Définition Version
41 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

42 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
4 Planification
4 Planification
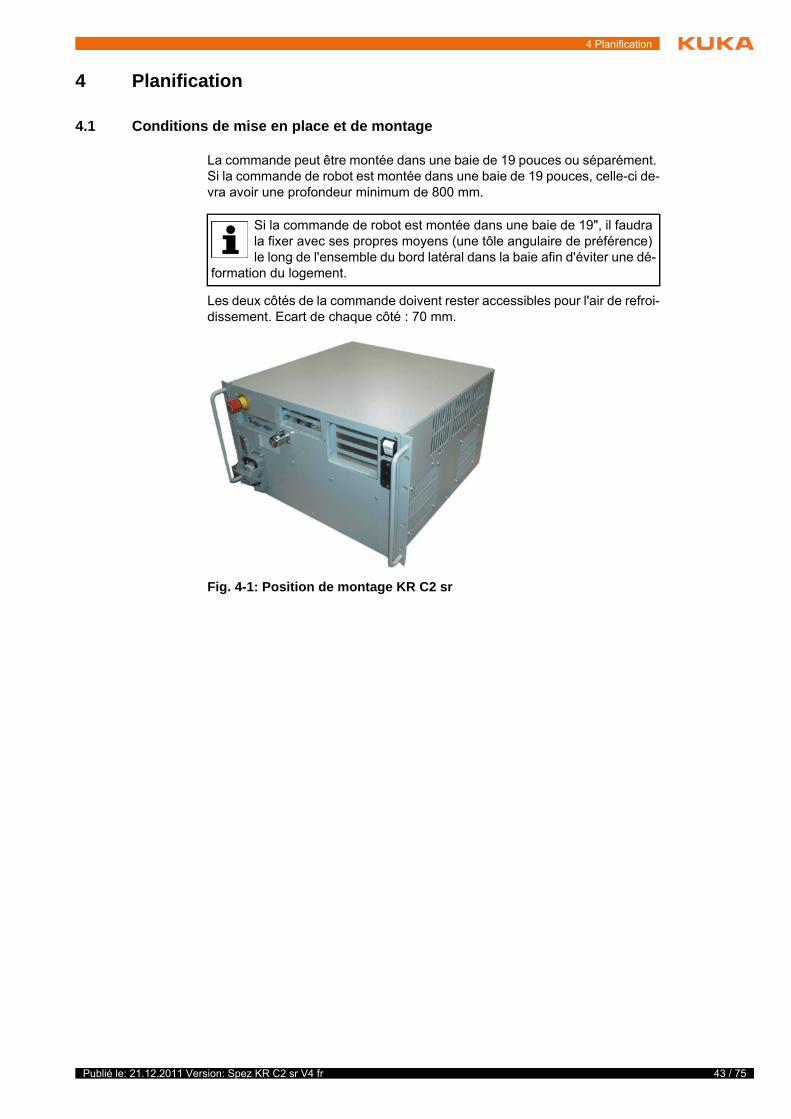
4.1 Conditions de mise en place et de montage
La commande peut être montée dans une baie de 19 pouces ou séparément. Si la commande de robot est montée dans une baie de 19 pouces, celle-ci de-vra avoir une profondeur minimum de 800 mm.
Les deux côtés de la commande doivent rester accessibles pour l'air de refroi-dissement. Ecart de chaque côté : 70 mm.
Si la commande de robot est montée dans une baie de 19", il faudra la fixer avec ses propres moyens (une tôle angulaire de préférence) le long de l'ensemble du bord latéral dans la baie afin d'éviter une dé-
formation du logement.
Fig. 4-1: Position de montage KR C2 sr
43 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
44 / 75
KR C2 sr
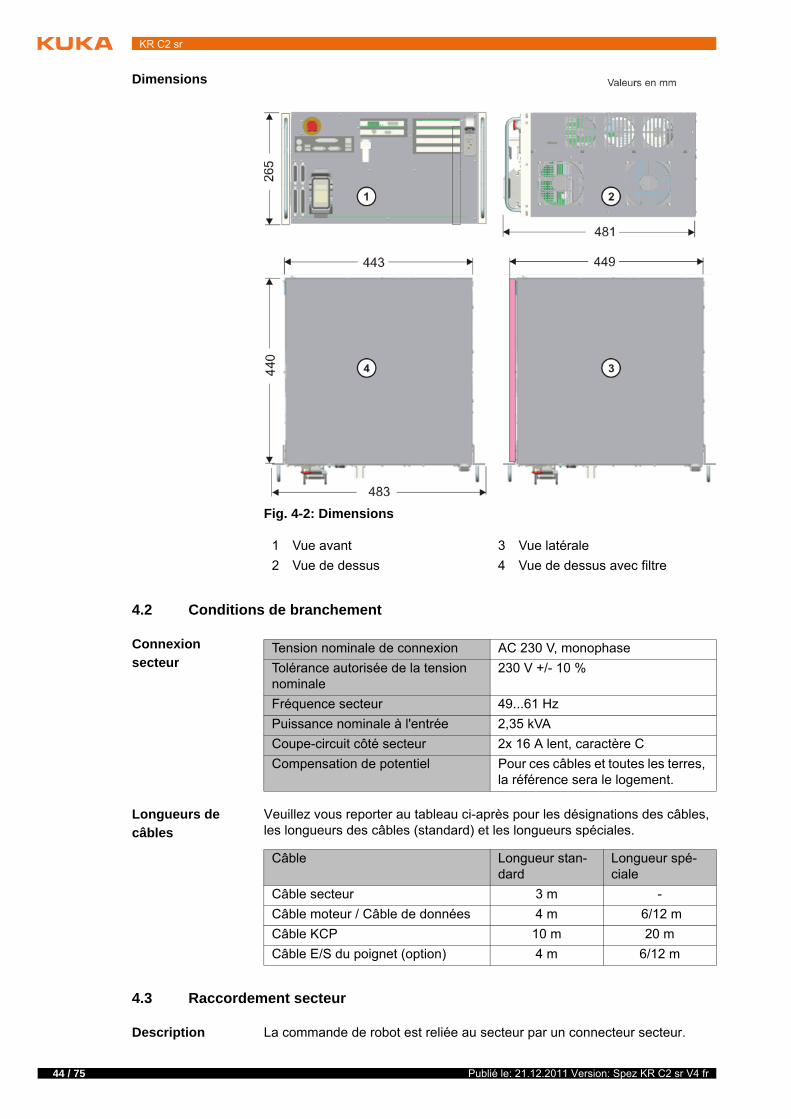
Dimensions
4.2 Conditions de branchement
Connexion
secteur
Longueurs de
câbles
Veuillez vous reporter au tableau ci-après pour les désignations des câbles, les longueurs des câbles (standard) et les longueurs spéciales.
4.3 Raccordement secteur
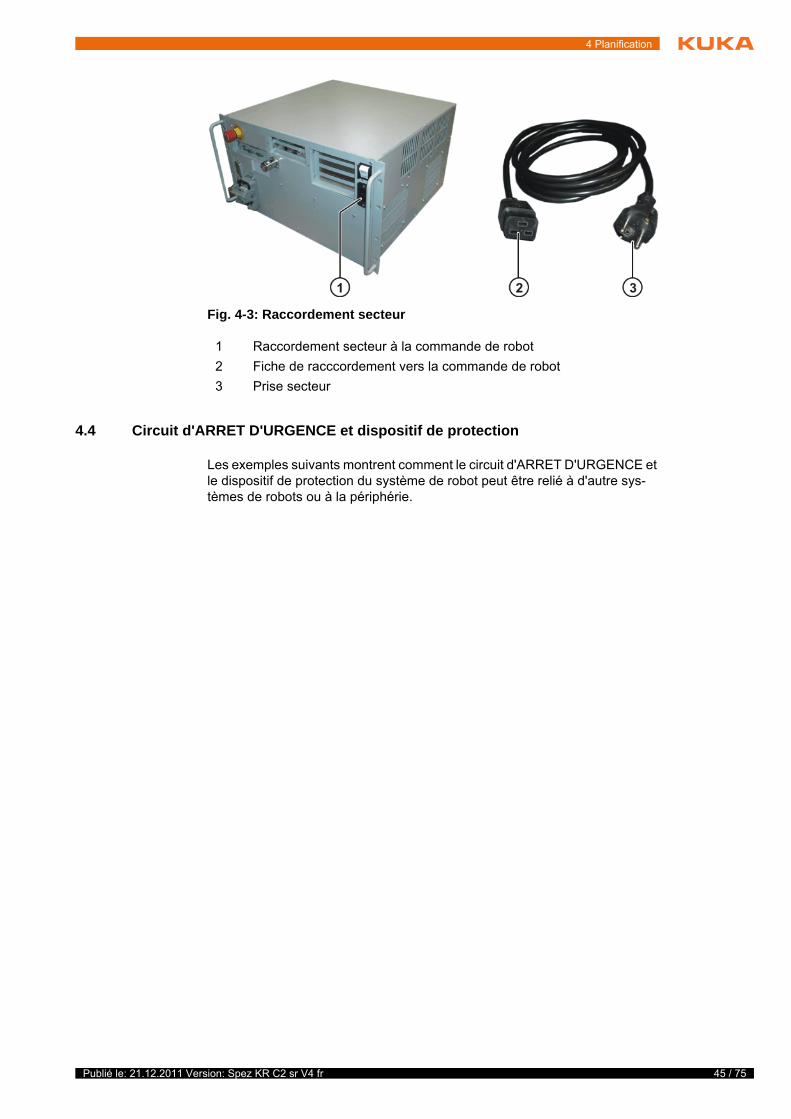
Description La commande de robot est reliée au secteur par un connecteur secteur.
Fig. 4-2: Dimensions
1 Vue avant 3 Vue latérale
2 Vue de dessus 4 Vue de dessus avec filtre
Tension nominale de connexion AC 230 V, monophase
Tolérance autorisée de la tension nominale
230 V +/- 10 %
Fréquence secteur 49...61 Hz
Puissance nominale à l'entrée 2,35 kVA
Coupe-circuit côté secteur 2x 16 A lent, caractère C
Compensation de potentiel Pour ces câbles et toutes les terres, la référence sera le logement.
Câble Longueur stan-dard
Longueur spé-ciale
Câble secteur 3 m -
Câble moteur / Câble de données 4 m 6/12 m
Câble KCP 10 m 20 m
Câble E/S du poignet (option) 4 m 6/12 m
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
4 Planification
4.4 Circuit d'ARRET D'URGENCE et dispositif de protection
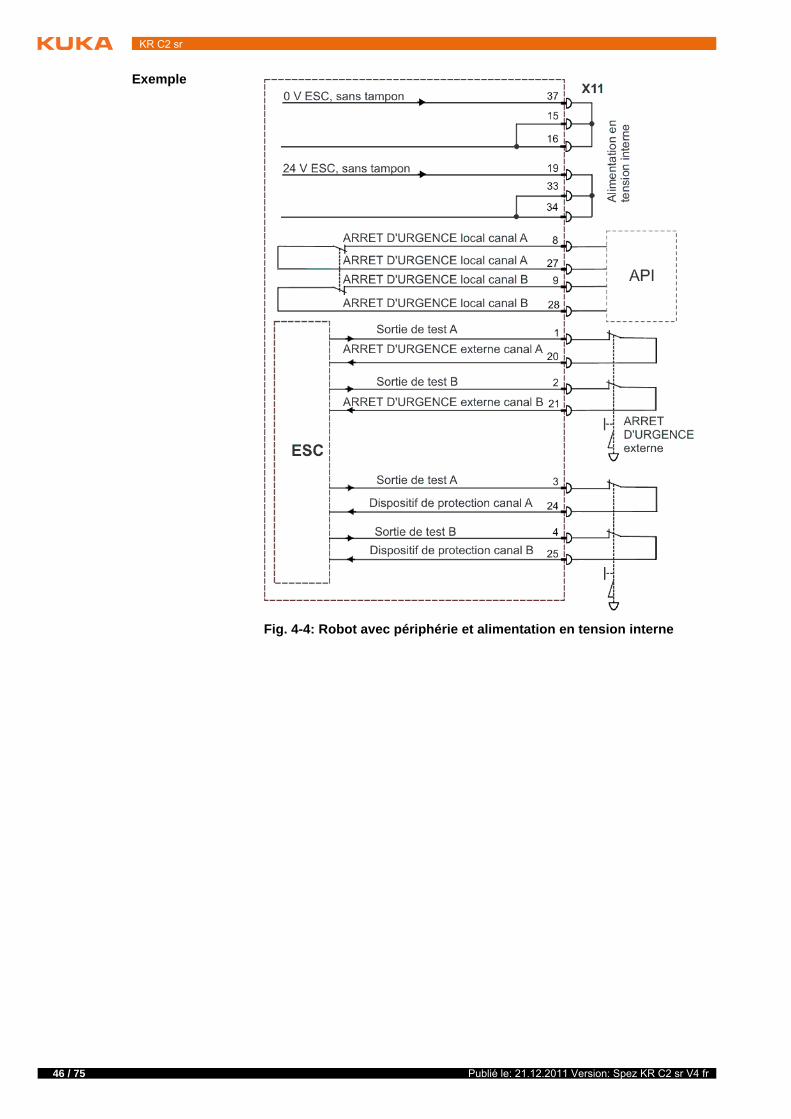
Les exemples suivants montrent comment le circuit d'ARRET D'URGENCE et le dispositif de protection du système de robot peut être relié à d'autre sys-tèmes de robots ou à la périphérie.
Fig. 4-3: Raccordement secteur
1 Raccordement secteur à la commande de robot
2 Fiche de racccordement vers la commande de robot
3 Prise secteur
45 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
46 / 75
KR C2 sr
Exemple
Fig. 4-4: Robot avec périphérie et alimentation en tension interne
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
4 Planification
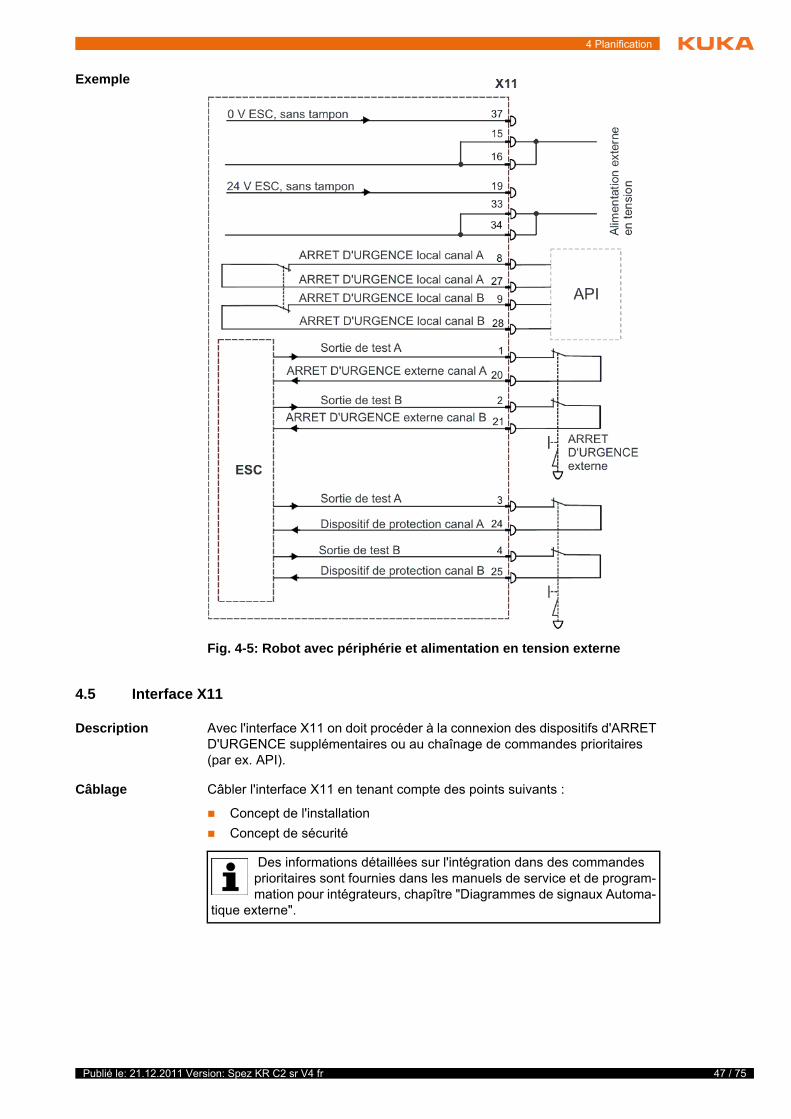
Exemple
4.5 Interface X11
Description Avec l'interface X11 on doit procéder à la connexion des dispositifs d'ARRET D'URGENCE supplémentaires ou au chaînage de commandes prioritaires (par ex. API).
Câblage Câbler l'interface X11 en tenant compte des points suivants :
Concept de l'installation
Concept de sécurité
Fig. 4-5: Robot avec périphérie et alimentation en tension externe
Des informations détaillées sur l'intégration dans des commandes prioritaires sont fournies dans les manuels de service et de program-mation pour intégrateurs, chapître "Diagrammes de signaux Automa-
tique externe".
47 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
48 / 75
KR C2 sr
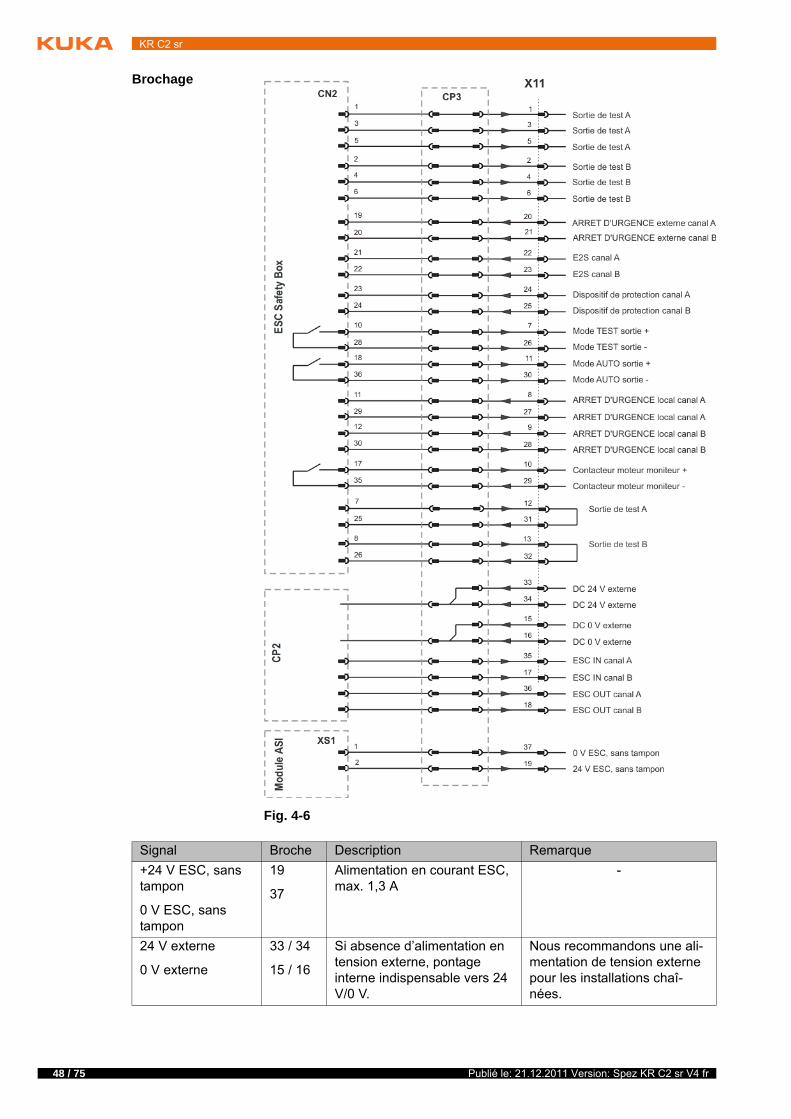
Brochage
Fig. 4-6
Signal Broche Description Remarque
+24 V ESC, sans tampon
0 V ESC, sans tampon
19
37
Alimentation en courant ESC, max. 1,3 A
-
24 V externe
0 V externe
33 / 34
15 / 16
Si absence d’alimentation en tension externe, pontage interne indispensable vers 24 V/0 V.
Nous recommandons une ali-mentation de tension externe pour les installations chaî-nées.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
4 Planification
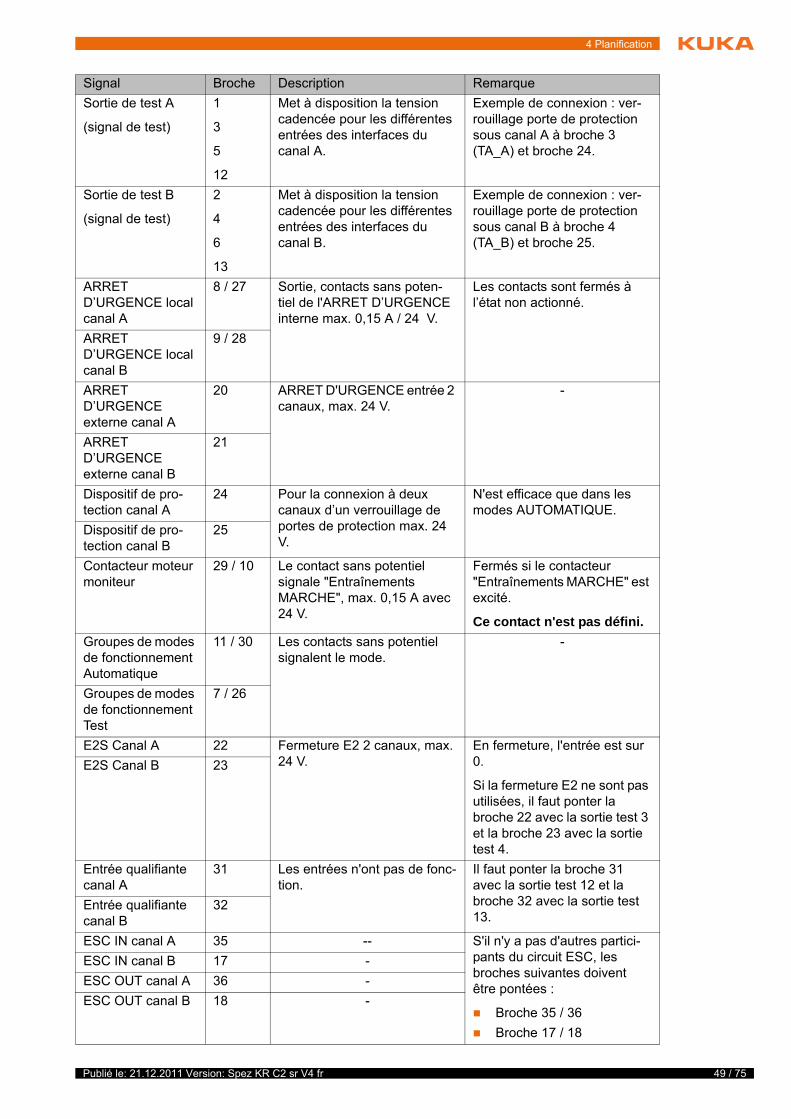
Sortie de test A
(signal de test)
1
3
5
12
Met à disposition la tension cadencée pour les différentes entrées des interfaces du canal A.
Exemple de connexion : ver-rouillage porte de protection sous canal A à broche 3 (TA_A) et broche 24.
Sortie de test B
(signal de test)
2
4
6
13
Met à disposition la tension cadencée pour les différentes entrées des interfaces du canal B.
Exemple de connexion : ver-rouillage porte de protection sous canal B à broche 4 (TA_B) et broche 25.
ARRET D’URGENCE local canal A
8 / 27 Sortie, contacts sans poten-tiel de l'ARRET D’URGENCE interne max. 0,15 A / 24 V.
Les contacts sont fermés à l’état non actionné.
ARRET D’URGENCE local canal B
9 / 28
ARRET D’URGENCE externe canal A
20 ARRET D'URGENCE entrée 2 canaux, max. 24 V.
-
ARRET D’URGENCE externe canal B
21
Dispositif de pro-tection canal A
24 Pour la connexion à deux canaux d’un verrouillage de portes de protection max. 24 V.
N'est efficace que dans les modes AUTOMATIQUE.
Dispositif de pro-tection canal B
25
Contacteur moteur moniteur
29 / 10 Le contact sans potentiel signale "Entraînements MARCHE", max. 0,15 A avec 24 V.
Fermés si le contacteur "Entraînements MARCHE" est excité.
Ce contact n'est pas défini.
Groupes de modes de fonctionnement Automatique
11 / 30 Les contacts sans potentiel signalent le mode.
-
Groupes de modes de fonctionnement Test
7 / 26
E2S Canal A 22 Fermeture E2 2 canaux, max. 24 V.
En fermeture, l'entrée est sur 0.
Si la fermeture E2 ne sont pas utilisées, il faut ponter la broche 22 avec la sortie test 3 et la broche 23 avec la sortie test 4.
E2S Canal B 23
Entrée qualifiante canal A
31 Les entrées n'ont pas de fonc-tion.
Il faut ponter la broche 31 avec la sortie test 12 et la broche 32 avec la sortie test 13.
Entrée qualifiante canal B
32
ESC IN canal A 35 -- S'il n'y a pas d'autres partici-pants du circuit ESC, les broches suivantes doivent être pontées :
Broche 35 / 36
Broche 17 / 18
ESC IN canal B 17 -
ESC OUT canal A 36 -
ESC OUT canal B 18 -
Signal Broche Description Remarque
49 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
50 / 75
KR C2 sr
E/S Les E/S peuvent être configurées avec les composants suivants :
DeviceNet (Master) via MFC
Cartes de bus de champ optionnelles
Interbus
PROFIBUS
DeviceNet
Interfaces client spécifiques
Lors du câblage des signaux d'entrée et des signaux de test dans l'installation, il faut prendre des mesures appropriées afin d'éviter une liaison (faux contact) des tensions (par ex. avec des câblages sépa-
rés des signaux d'entrée et des signaux de test).
Lors du câblage des signaux de sortie et des signaux de test dans l'installation, il faut prendre des mesures appropriées afin d'éviter une liaison (faux contact) entre les signaux de sorties d'un canal (par ex.
avec des câblages séparés).
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
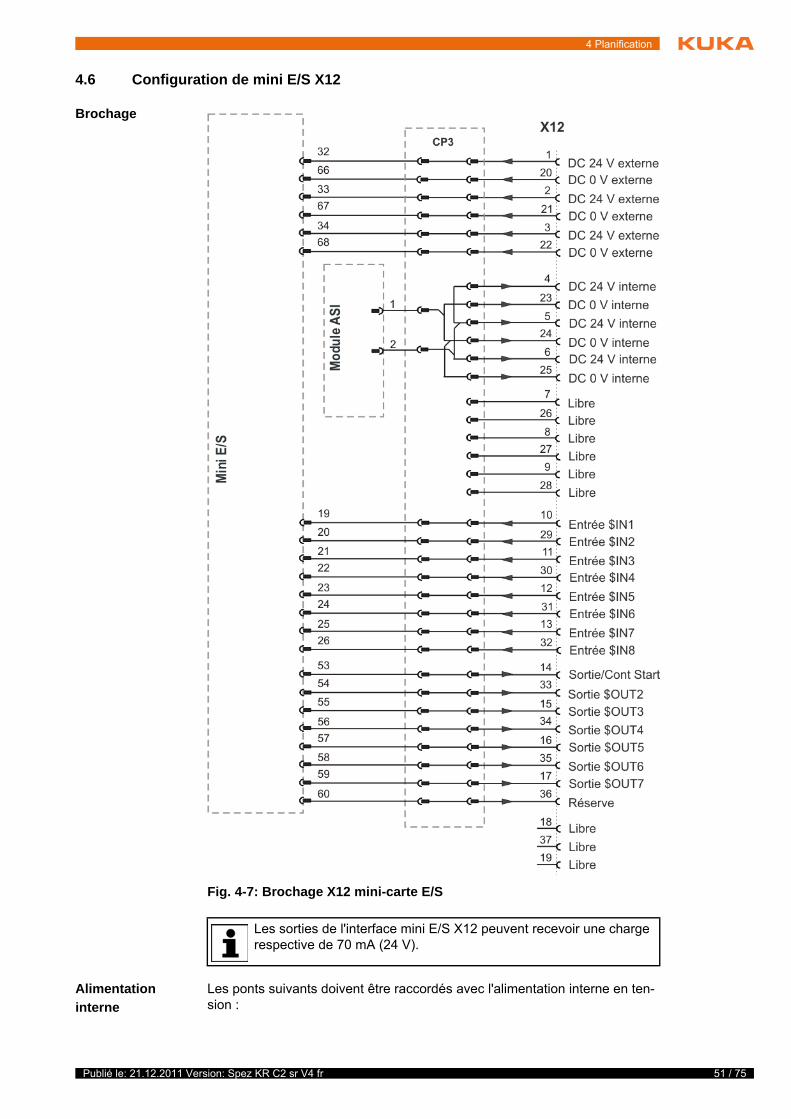
4 Planification
4.6 Configuration de mini E/S X12
Brochage
Alimentation
interne
Les ponts suivants doivent être raccordés avec l'alimentation interne en ten-sion :
Fig. 4-7: Brochage X12 mini-carte E/S
Les sorties de l'interface mini E/S X12 peuvent recevoir une charge respective de 70 mA (24 V).
51 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
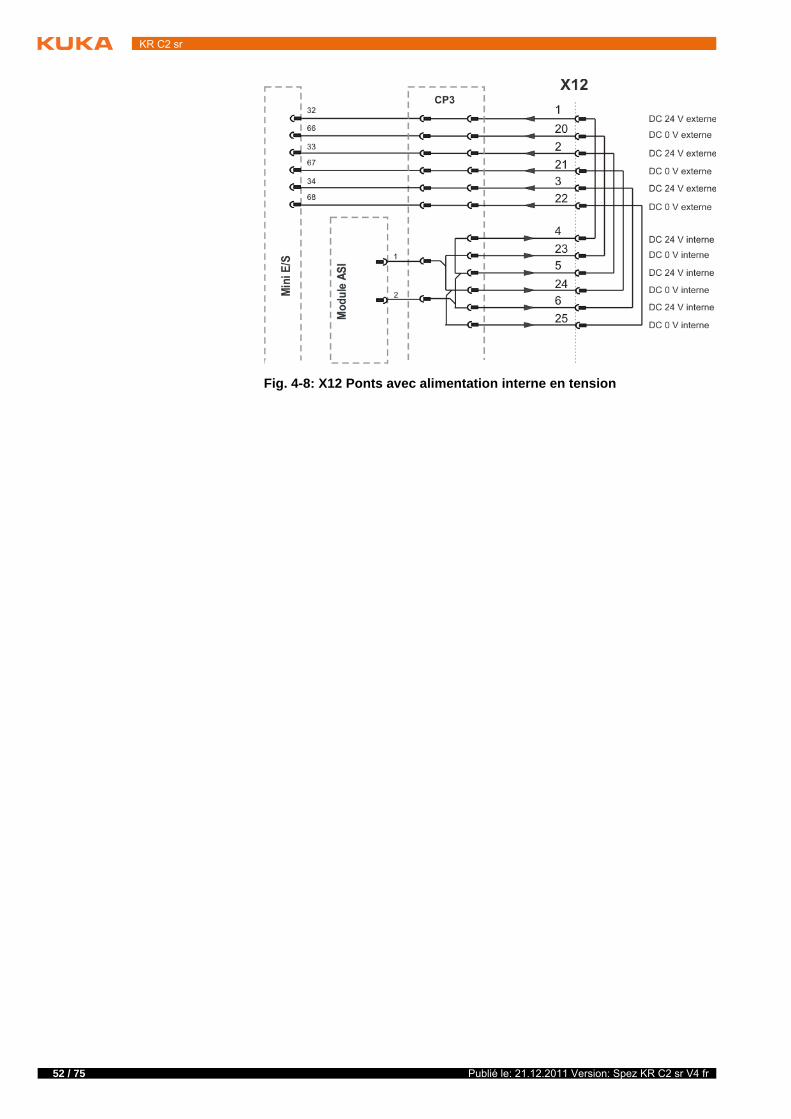
52 / 75
KR C2 sr
Fig. 4-8: X12 Ponts avec alimentation interne en tension
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
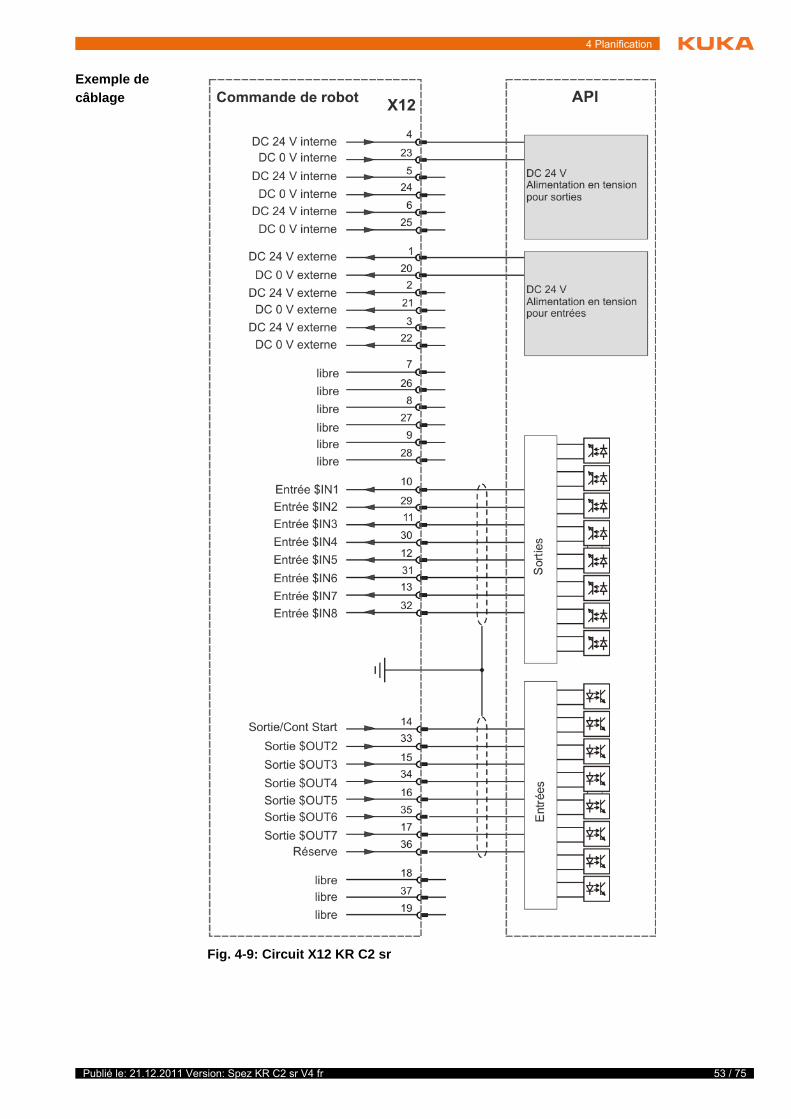
4 Planification
Exemple de
câblage
Fig. 4-9: Circuit X12 KR C2 sr
53 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
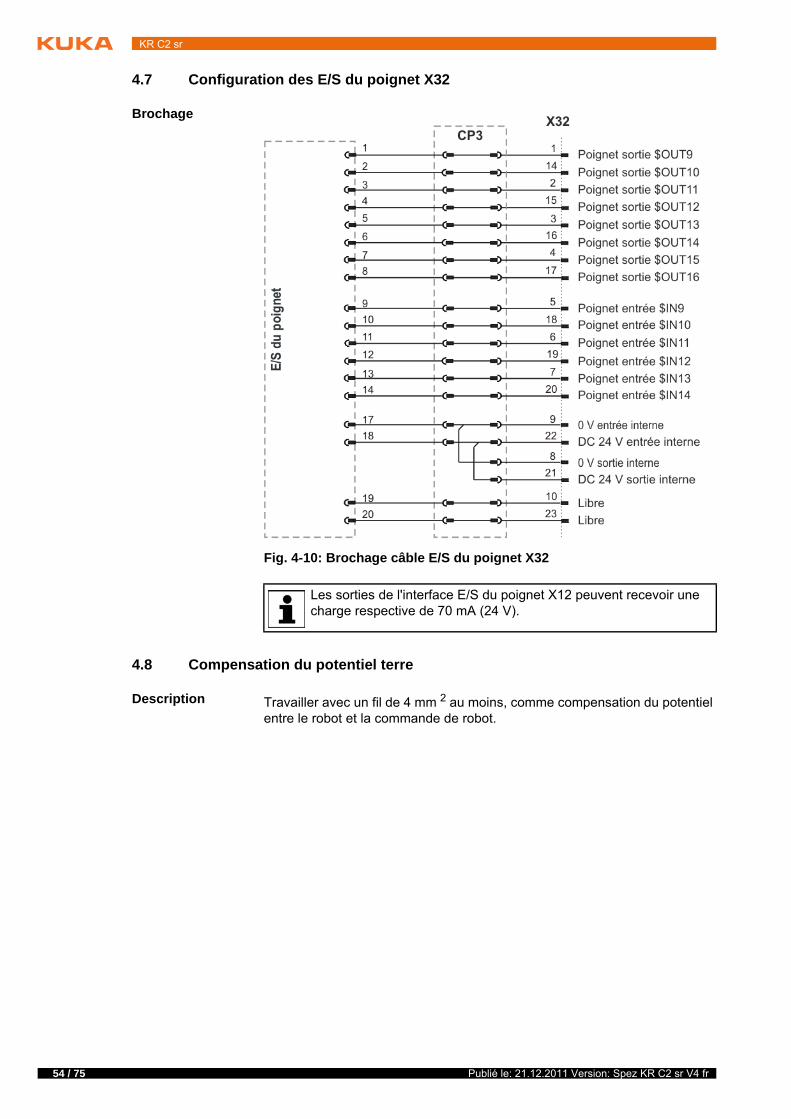
54 / 75
KR C2 sr
4.7 Configuration des E/S du poignet X32
Brochage
4.8 Compensation du potentiel terre
Description Travailler avec un fil de 4 mm 2 au moins, comme compensation du potentiel entre le robot et la commande de robot.
Fig. 4-10: Brochage câble E/S du poignet X32
Les sorties de l'interface E/S du poignet X12 peuvent recevoir une charge respective de 70 mA (24 V).
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
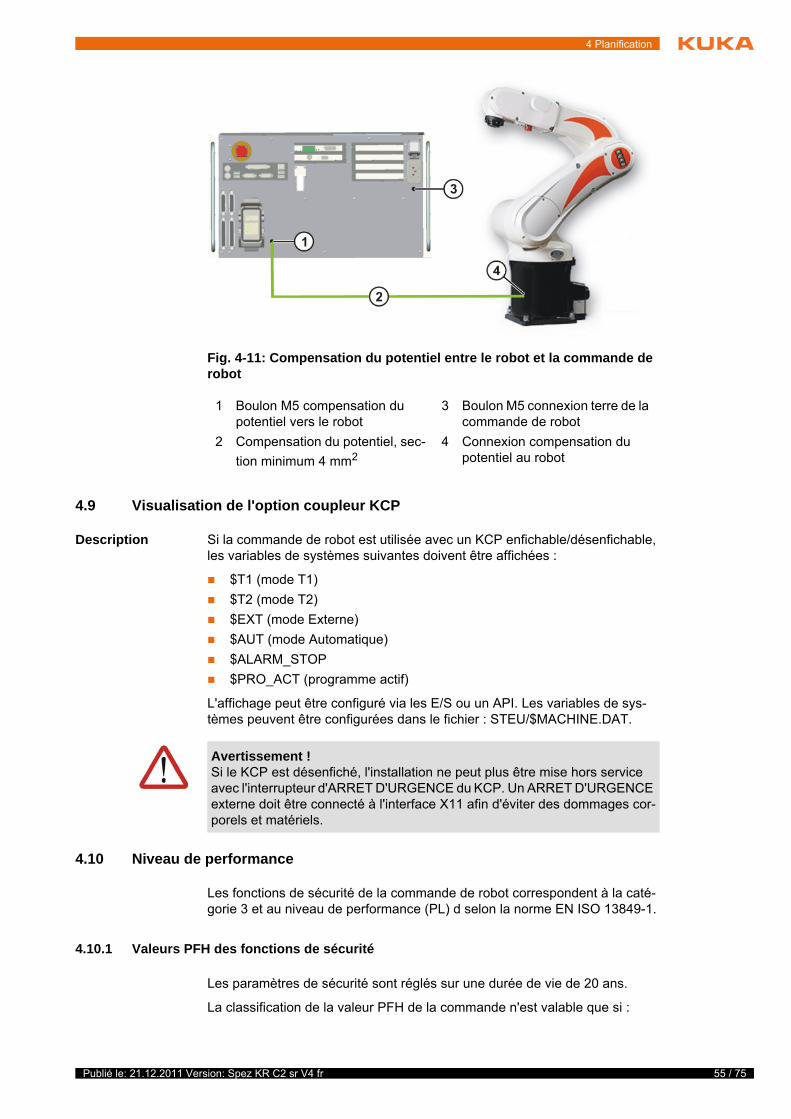
4 Planification
4.9 Visualisation de l'option coupleur KCP
Description Si la commande de robot est utilisée avec un KCP enfichable/désenfichable, les variables de systèmes suivantes doivent être affichées :
$T1 (mode T1)
$T2 (mode T2)
$EXT (mode Externe)
$AUT (mode Automatique)
$ALARM_STOP
$PRO_ACT (programme actif)
L'affichage peut être configuré via les E/S ou un API. Les variables de sys-tèmes peuvent être configurées dans le fichier : STEU/$MACHINE.DAT.
4.10 Niveau de performance
Les fonctions de sécurité de la commande de robot correspondent à la caté-gorie 3 et au niveau de performance (PL) d selon la norme EN ISO 13849-1.
4.10.1 Valeurs PFH des fonctions de sécurité
Les paramètres de sécurité sont réglés sur une durée de vie de 20 ans.
La classification de la valeur PFH de la commande n'est valable que si :
Fig. 4-11: Compensation du potentiel entre le robot et la commande de robot
1 Boulon M5 compensation du potentiel vers le robot
3 Boulon M5 connexion terre de la commande de robot
2 Compensation du potentiel, sec-
tion minimum 4 mm24 Connexion compensation du
potentiel au robot
Avertissement !Si le KCP est désenfiché, l'installation ne peut plus être mise hors service avec l'interrupteur d'ARRET D'URGENCE du KCP. Un ARRET D'URGENCE externe doit être connecté à l'interface X11 afin d'éviter des dommages cor-porels et matériels.
55 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
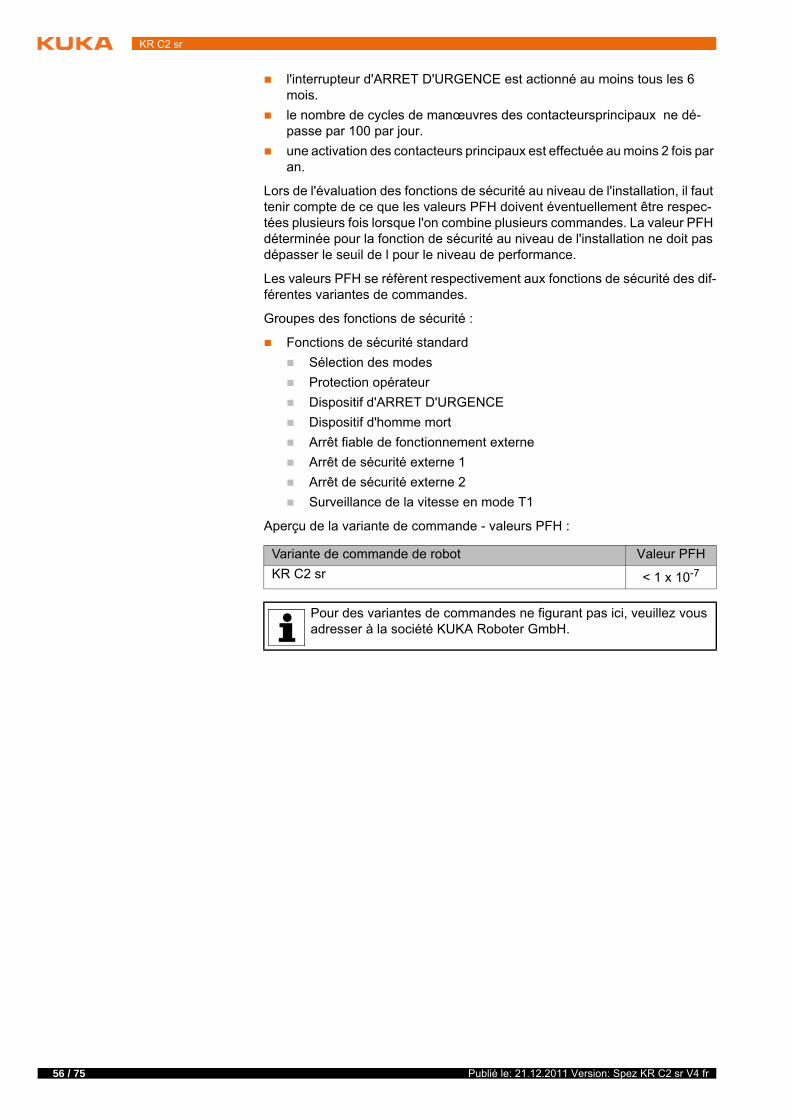
56 / 75
KR C2 sr
l'interrupteur d'ARRET D'URGENCE est actionné au moins tous les 6 mois.
le nombre de cycles de manœuvres des contacteursprincipaux ne dé-passe par 100 par jour.
une activation des contacteurs principaux est effectuée au moins 2 fois par an.
Lors de l'évaluation des fonctions de sécurité au niveau de l'installation, il faut tenir compte de ce que les valeurs PFH doivent éventuellement être respec-tées plusieurs fois lorsque l'on combine plusieurs commandes. La valeur PFH déterminée pour la fonction de sécurité au niveau de l'installation ne doit pas dépasser le seuil de l pour le niveau de performance.
Les valeurs PFH se réfèrent respectivement aux fonctions de sécurité des dif-férentes variantes de commandes.
Groupes des fonctions de sécurité :
Fonctions de sécurité standard
Sélection des modes
Protection opérateur
Dispositif d'ARRET D'URGENCE
Dispositif d'homme mort
Arrêt fiable de fonctionnement externe
Arrêt de sécurité externe 1
Arrêt de sécurité externe 2
Surveillance de la vitesse en mode T1
Aperçu de la variante de commande - valeurs PFH :
Variante de commande de robot Valeur PFH
KR C2 sr < 1 x 10-7
Pour des variantes de commandes ne figurant pas ici, veuillez vous adresser à la société KUKA Roboter GmbH.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
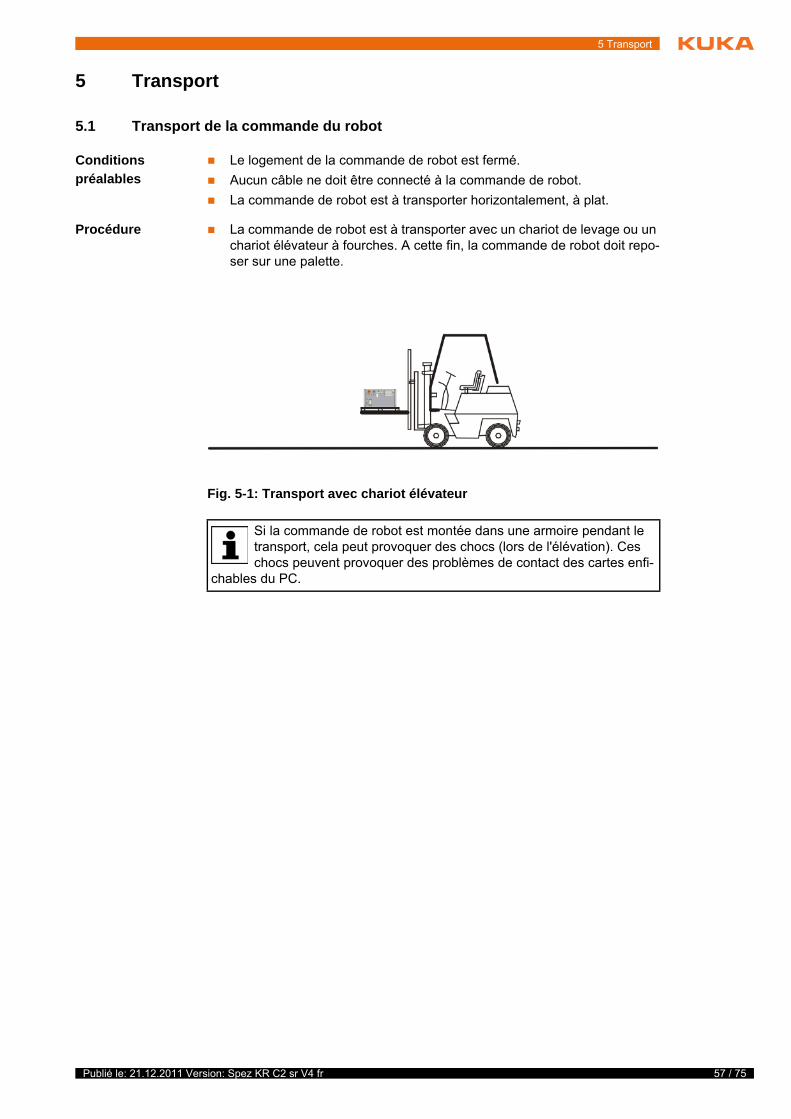
5 Transport
5 Transport
5.1 Transport de la commande du robot
Conditions
préalables
Le logement de la commande de robot est fermé.
Aucun câble ne doit être connecté à la commande de robot.
La commande de robot est à transporter horizontalement, à plat.
Procédure La commande de robot est à transporter avec un chariot de levage ou un chariot élévateur à fourches. A cette fin, la commande de robot doit repo-ser sur une palette.
Fig. 5-1: Transport avec chariot élévateur
Si la commande de robot est montée dans une armoire pendant le transport, cela peut provoquer des chocs (lors de l'élévation). Ces chocs peuvent provoquer des problèmes de contact des cartes enfi-
chables du PC.
57 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

58 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
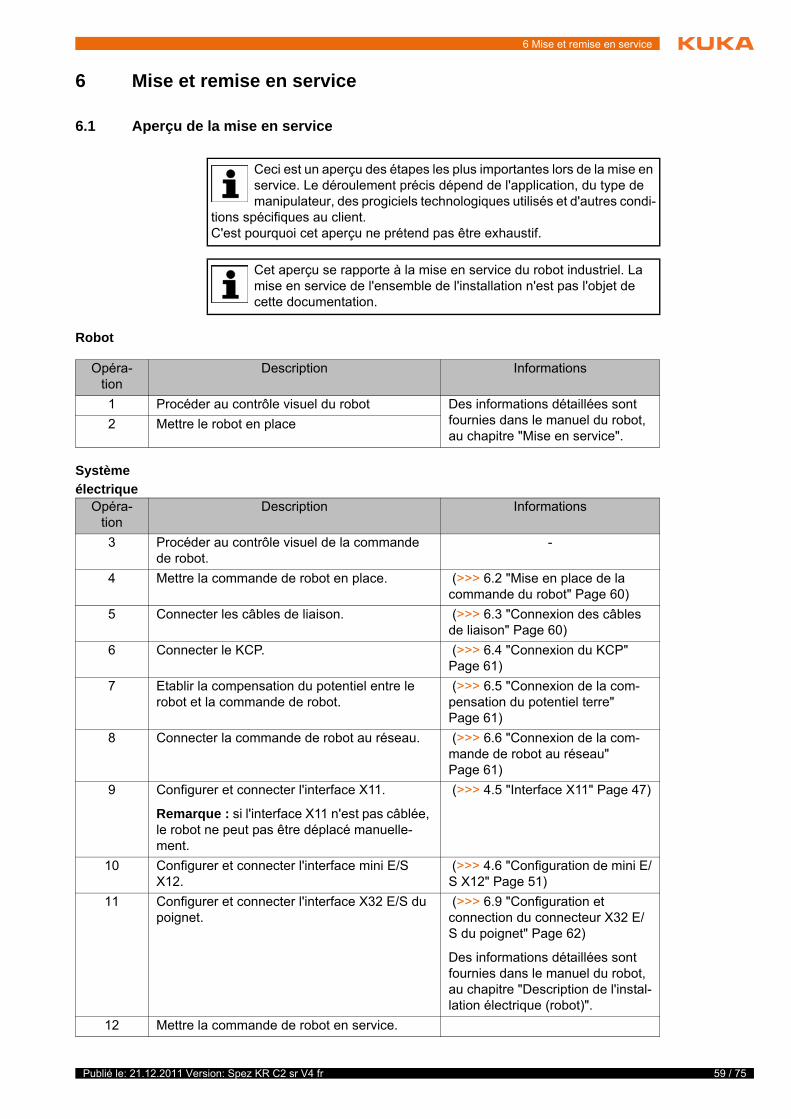
6 Mise et remise en service
6 Mise et remise en service
6.1 Aperçu de la mise en service
Robot
Système
électrique
Ceci est un aperçu des étapes les plus importantes lors de la mise en service. Le déroulement précis dépend de l'application, du type de manipulateur, des progiciels technologiques utilisés et d'autres condi-
tions spécifiques au client.C'est pourquoi cet aperçu ne prétend pas être exhaustif.
Cet aperçu se rapporte à la mise en service du robot industriel. La mise en service de l'ensemble de l'installation n'est pas l'objet de cette documentation.
Opéra-tion
Description Informations
1 Procéder au contrôle visuel du robot Des informations détaillées sont fournies dans le manuel du robot, au chapitre "Mise en service".
2 Mettre le robot en place
Opéra-tion
Description Informations
3 Procéder au contrôle visuel de la commande de robot.
-
4 Mettre la commande de robot en place. (>>> 6.2 "Mise en place de la commande du robot" Page 60)
5 Connecter les câbles de liaison. (>>> 6.3 "Connexion des câbles de liaison" Page 60)
6 Connecter le KCP. (>>> 6.4 "Connexion du KCP" Page 61)
7 Etablir la compensation du potentiel entre le robot et la commande de robot.
(>>> 6.5 "Connexion de la com-pensation du potentiel terre" Page 61)
8 Connecter la commande de robot au réseau. (>>> 6.6 "Connexion de la com-mande de robot au réseau" Page 61)
9 Configurer et connecter l'interface X11.
Remarque : si l'interface X11 n'est pas câblée, le robot ne peut pas être déplacé manuelle-ment.
(>>> 4.5 "Interface X11" Page 47)
10 Configurer et connecter l'interface mini E/S X12.
(>>> 4.6 "Configuration de mini E/S X12" Page 51)
11 Configurer et connecter l'interface X32 E/S du poignet.
(>>> 6.9 "Configuration et connection du connecteur X32 E/S du poignet" Page 62)
Des informations détaillées sont fournies dans le manuel du robot, au chapitre "Description de l'instal-lation électrique (robot)".
12 Mettre la commande de robot en service.
59 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
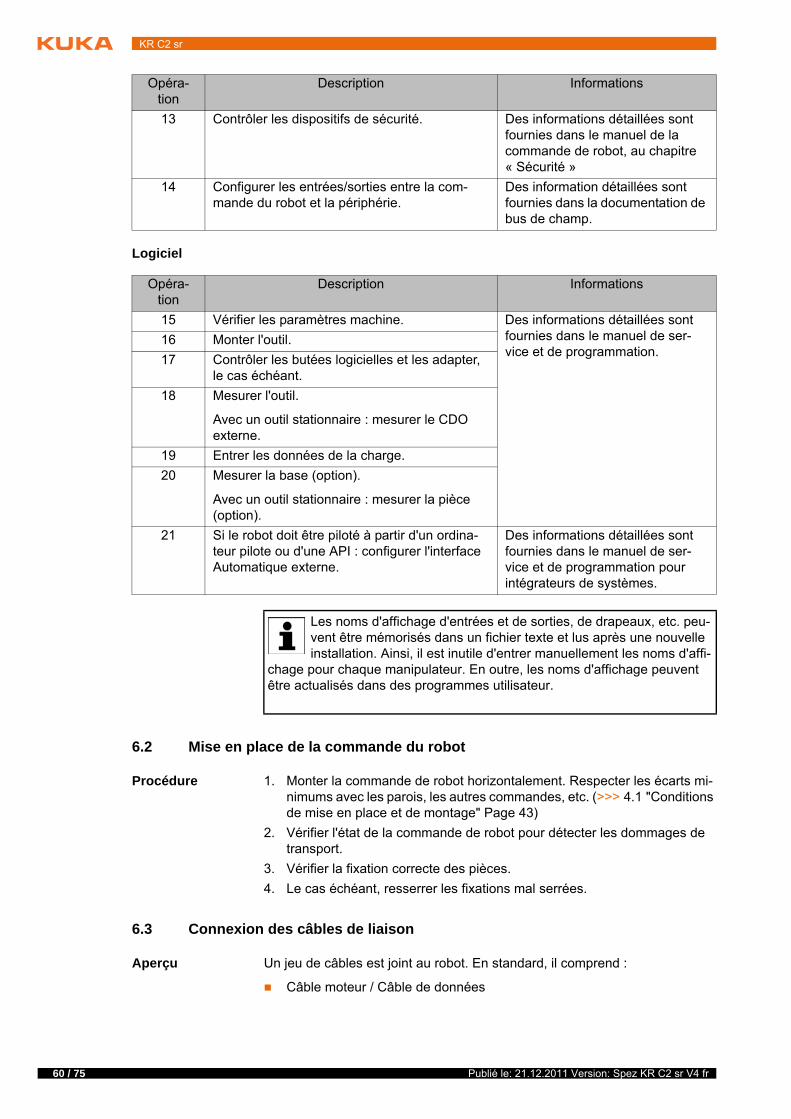
60 / 75
KR C2 sr
Logiciel
6.2 Mise en place de la commande du robot
Procédure 1. Monter la commande de robot horizontalement. Respecter les écarts mi-nimums avec les parois, les autres commandes, etc. (>>> 4.1 "Conditions de mise en place et de montage" Page 43)
2. Vérifier l'état de la commande de robot pour détecter les dommages de transport.
3. Vérifier la fixation correcte des pièces.
4. Le cas échéant, resserrer les fixations mal serrées.
6.3 Connexion des câbles de liaison
Aperçu Un jeu de câbles est joint au robot. En standard, il comprend :
Câble moteur / Câble de données
13 Contrôler les dispositifs de sécurité. Des informations détaillées sont fournies dans le manuel de la commande de robot, au chapitre « Sécurité »
14 Configurer les entrées/sorties entre la com-mande du robot et la périphérie.
Des information détaillées sont fournies dans la documentation de bus de champ.
Opéra-tion
Description Informations
Opéra-tion
Description Informations
15 Vérifier les paramètres machine. Des informations détaillées sont fournies dans le manuel de ser-vice et de programmation.
16 Monter l'outil.
17 Contrôler les butées logicielles et les adapter, le cas échéant.
18 Mesurer l'outil.
Avec un outil stationnaire : mesurer le CDO externe.
19 Entrer les données de la charge.
20 Mesurer la base (option).
Avec un outil stationnaire : mesurer la pièce (option).
21 Si le robot doit être piloté à partir d'un ordina-teur pilote ou d'une API : configurer l'interface Automatique externe.
Des informations détaillées sont fournies dans le manuel de ser-vice et de programmation pour intégrateurs de systèmes.
Les noms d'affichage d'entrées et de sorties, de drapeaux, etc. peu-vent être mémorisés dans un fichier texte et lus après une nouvelle installation. Ainsi, il est inutile d'entrer manuellement les noms d'affi-
chage pour chaque manipulateur. En outre, les noms d'affichage peuvent être actualisés dans des programmes utilisateur.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
6 Mise et remise en service
Câble E/S du poignet (option)
Pour des applications supplémentaires vous pouvez également disposer des câbles suivants :
Câbles de périphérie
Procédure 1. Poser le câble moteur/de données de la commande de robot X20 vers le boîtier de raccordement du robot et connecter le connecteur CN22.
2. Poser le câble E/S du poignet de la commande de robot X32 vers le boîtier de raccordement du robot et connecter le connecteur CN20 (option).
3. Connecter les câbles de périphérie.
6.4 Connexion du KCP
Procédure Connecter le KCP au X19 de la commande de robot.
6.5 Connexion de la compensation du potentiel terre
Procédure 1. Un fil de 4 mm2 comme compensation du potentiel entre le robot et la com-mande de robot est à poser et à connecter par le client. (>>> 4.8 "Com-pensation du potentiel terre" Page 54)
La compensation est à poser sur le chemin le plus court entre la com-mande de robot et le robot.
2. Le client est responsable de la mise à la terre de la commande de robot.
3. Effectuer un contrôle de la terre pour le système complet du robot selon DIN EN 60204-1.
6.6 Connexion de la commande de robot au réseau
Procédure La commande de robot est reliée au secteur par un connecteur secteur X1. (>>> 4.3 "Raccordement secteur" Page 44)
6.7 Configuration et connexion du connecteur X11
Conditions
préalables La commande du robot doit être désactivée.
Procédure 1. Configurer le connecteur X11 selon le concept de l'installation et de la sé-curité. (>>> 4.5 "Interface X11" Page 47)
2. Connecter le connecteur interface X11 à la commande de robot.
La commande de robot est préconfigurée pour le robot industriel correspondant. Si des câbles sont
échangés, le manipulateur et les axes supplémentaires (option) peuvent contenir des données erronées et causer ainsi des dommages matériels ou corporels. Si l'installation est composée de plusieurs manipulateurs, les câbles de liaison doivent toujours être connectés au manipulateur et à la commande de robot correspondante.
Connecter ou déconnecter le connecteur X11 lorsque la commande de robot est en service peut
détruire le module ASI. Ne connecter ou déconnecter le connecteur X11 que lorsque la commande du robot est hors service.
61 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
62 / 75
KR C2 sr
6.8 Configuration et connection du connecteur mini E/S X12
Procédure 1. Configurer le connecteur X12 selon le concept de l'installation et de la sé-curité. (>>> 4.6 "Configuration de mini E/S X12" Page 51)
2. Connecter le connecteur interface X12 à la commande de robot.
6.9 Configuration et connection du connecteur X32 E/S du poignet
Procédure 1. Configurer le connecteur X32 selon le concept de l'installation et de la sé-curité. (>>> 4.7 "Configuration des E/S du poignet X32" Page 54)
2. Connecter le connecteur interface X32 à la commande de robot.
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
7 SAV KUKA
7 SAV KUKA
7.1 Demande d'assistance
Introduction La documentation de KUKA Roboter GmbH comprenant de nombreuses in-formations relatives au service et à la commande vous assistera lors de l'éli-mination de défauts. Votre filiale locale est à votre disposition pour tout complément d'information ou toute demande supplémentaire.
Informations Pour traiter toute demande SAV, nous nécessitons les informations suivantes :
Type et numéro de série du robot
Type et numéro de série de la commande
Type et numéro de série de l'unité linéaire (option)
Version du logiciel KUKA System Software
Logiciel en option ou modifications
Archives du logiciel
Pour logiciel KUKA System Software V8 : Créer le paquet spécial de don-nées pour l'analyse de défauts, au lieu d'archives normales (via KrcDiag).
Application existante
Axes supplémentaires existants (option)
Description du problème, durée et fréquence du défaut
7.2 Assistance client KUKA
Disponibilité Notre assistance client KUKA est disponible dans de nombreux pays. Nous sommes à votre disposition pour toute question !
Argentine Ruben Costantini S.A. (agence)
Luis Angel Huergo 13 20
Parque Industrial
2400 San Francisco (CBA)
Argentine
Tél. +54 3564 421033
Fax +54 3564 428877
Australie Marand Precision Engineering Pty. Ltd. (agence)
153 Keys Road
Moorabbin
Victoria 31 89
Australie
Tél. +61 3 8552-0600
Fax +61 3 8552-0605
63 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
64 / 75
KR C2 sr
Belgique KUKA Automatisering + Robots N.V.
Centrum Zuid 1031
3530 Houthalen
Belgique
Tél. +32 11 516160
Fax +32 11 526794
www.kuka.be
Brésil KUKA Roboter do Brasil Ltda.
Avenida Franz Liszt, 80
Parque Novo Mundo
Jd. Guançã
CEP 02151 900 São Paulo
SP Brésil
Tél. +55 11 69844900
Fax +55 11 62017883
Chili Robotec S.A. (agence)
Santiago de Chile
Chili
Tél. +56 2 331-5951
Fax +56 2 331-5952
www.robotec.cl
Chine KUKA Flexible Manufacturing Equipment (Shanghai) Co., Ltd.
Shanghai Qingpu Industrial Zone
No. 502 Tianying Rd.
201712 Shanghai
R.P. de Chine
Tél. +86 21 5922-8652
Fax +86 21 5922-8538
www.kuka.cn
Allemagne KUKA Roboter GmbH
Zugspitzstr. 140
86165 Augsburg
Allemagne
Tél. +49 821 797-4000
Fax +49 821 797-1616
www.kuka-roboter.de
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
7 SAV KUKA
France KUKA Automatisme + Robotique SAS
Techvallée
6, Avenue du Parc
91140 Villebon S/Yvette
France
Tél. +33 1 6931660-0
Fax +33 1 6931660-1
www.kuka.fr
Inde KUKA Robotics, Private Limited
621 Galleria Towers
DLF Phase IV
122 002 Gurgaon
Haryana
Inde
Tél. +91 124 4148574
www.kuka.in
Italie KUKA Roboter Italia S.p.A.
Via Pavia 9/a - int.6
10098 Rivoli (TO)
Italie
Tél. +39 011 959-5013
Fax +39 011 959-5141
www.kuka.it
Japon KUKA Robotics Japan K.K.
Daiba Garden City Building 1F
2-3-5 Daiba, Minato-ku
Tokyo
135-0091
Japon
Tél. +81 3 6380-7311
Fax +81 3 6380-7312
Corée KUKA Robot Automation Korea, Co. Ltd.
4 Ba 806 Sihwa Ind. Complex
Sung-Gok Dong, Ansan City
Kyunggi Do
425-110
Corée
Tél. +82 31 496-9937 or -9938
Fax +82 31 496-9939
65 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
66 / 75
KR C2 sr
Malaisie KUKA Robot Automation Sdn Bhd
South East Asia Regional Office
No. 24, Jalan TPP 1/10
Taman Industri Puchong
47100 Puchong
Selangor
Malaisie
Tél. +60 3 8061-0613 or -0614
Fax +60 3 8061-7386
Mexique KUKA de Mexico S. de R.L. de C.V.
Rio San Joaquin #339, Local 5
Colonia Pensil Sur
C.P. 11490 Mexico D.F.
Mexique
Tél. +52 55 5203-8407
Fax +52 55 5203-8148
Norvège KUKA Sveiseanlegg + Roboter
Bryggeveien 9
2821 Gjövik
Norvège
Tél. +47 61 133422
Fax +47 61 186200
Autriche KUKA Roboter Austria GmbH
Regensburger Strasse 9/1
4020 Linz
Autriche
Tél. +43 732 784752
Fax +43 732 793880
www.kuka-roboter.at
Pologne KUKA Roboter Austria GmbH
Spółka z ograniczoną odpowiedzialnością
Oddział w Polsce
Ul. Porcelanowa 10
40-246 Katowice
Pologne
Tél. +48 327 30 32 13 or -14
Fax +48 327 30 32 26
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
7 SAV KUKA
Portugal KUKA Sistemas de Automatización S.A.
Rua do Alto da Guerra n° 50
Armazém 04
2910 011 Setúbal
Portugal
Tél. +351 265 729780
Fax +351 265 729782
Russie OOO KUKA Robotics Rus
Webnaja ul. 8A
107143 Moskau
Russie
Tél. +7 495 781-31-20
Fax +7 495 781-31-19
kuka-robotics.ru
Suède KUKA Svetsanläggningar + Robotar AB
A. Odhners gata 15
421 30 Västra Frölunda
Suède
Tél. +46 31 7266-200
Fax +46 31 7266-201
Suisse KUKA Roboter Schweiz AG
Riedstr. 7
8953 Dietikon
Suisse
Tél. +41 44 74490-90
Fax +41 44 74490-91
www.kuka-roboter.ch
Espagne KUKA Sistemas de Automatización S.A.
Pol. Industrial
Torrent de la Pastera
Carrer del Bages s/n
08800 Vilanova i la Geltrú (Barcelona)
Espagne
Tél. +34 93 814-2353
Fax +34 93 814-2950
www.kuka-e.com
67 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
68 / 75
KR C2 sr
Afrique du Sud Jendamark Automation LTD (agence)
76a York Road
North End
6000 Port Elizabeth
Afrique du Sud
Tél. +27 41 391 4700
Fax +27 41 373 3869
www.jendamark.co.za
Taïwan KUKA Robot Automation Taiwan Co. Ltd.
136, Section 2, Huanjung E. Road
Jungli City, Taoyuan
Taïwan 320
Tél. +886 3 4371902
Fax +886 3 2830023
www.kuka.com.tw
Thaïlande KUKA Robot Automation (M) Sdn Bhd
Thailand Office
c/o Maccall System Co. Ltd.
49/9-10 Soi Kingkaew 30 Kingkaew Road
Tt. Rachatheva, A. Bangpli
Samutprakarn
10540 Thaïlande
Tél. +66 2 7502737
Fax +66 2 6612355
www.kuka-roboter.de
République tchèque KUKA Roboter Austria GmbH
Organisation Tschechien und Slowakei
Sezemická 2757/2
193 00 Praha
Horní Počernice
République Tchèque
Tél. +420 22 62 12 27 2
Fax +420 22 62 12 27 0
Hongrie KUKA Robotics Hungaria Kft.
Fö út 140
2335 Taksony
Hongrie
Tél. +36 24 501609
Fax +36 24 477031
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
7 SAV KUKA
Etats-Unis KUKA Robotics Corp.
22500 Key Drive
Clinton Township
48036
Michigan
Etats-Unis
Tél. +1 866 8735852
Fax +1 586 5692087
www.kukarobotics.com
Royaume-Uni KUKA Automation + Robotics
Hereward Rise
Halesowen
B62 8AN
Royaume-Uni
Tél. +44 121 585-0800
Fax +44 121 585-0900
69 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

70 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
Index
Index
Numéros19 pouces 432004/108/CE 402006/42/CE 4089/336/CEE 4095/16/CE 40
AAccessoires 5, 21Alimentation en courant ESC 48Alimentation interne X12 51Antivirus 36Aperçu de la commande du robot 5Aperçu mise en service 59ARRET D'URGENCE externe 36ARRET D'URGENCE local 26, 27, 36ARRET D'URGENCE, externe 30ARRET D’URGENCE 10, 26ARRET D’URGENCE externe 26, 27Assistance client KUKA 63AUT 28AUT EXT 28Automatique 28Automatique externe 28Axes supplémentaires 21, 23
BBloc de puissance 8Boîtier de programmation portatif 5, 21Brochage X12 51Brochage X32 54Butées logicielles 31, 33
CCâble KCP 13Câble moteur/de données 13Câble secteur 13Câbles de liaison 5, 21, 60Caractéristiques techniques 17Carte IPM 8Catégorie 3 15Catégorie de stop 0 23Catégorie de stop 1 23Catégorie de stop 2 23Circuit d'ARRET D'URGENCE 45Circuits de sécurité 15Clavier 10Clavier externe 34Commande de robot 5, 36Commande du robot 5, 21Compensation du potentiel terre 54Conditions climatiques 17Conditions de branchement 44Conditions de mise en place 43Conditions de montage 43Connexion au réseau 61Connexion de la compensation du potentiel terre 61
Connexion du KCP 61Contrôle de la fonction 35Convoyeur 14Configuration de mini E/S X12 51Configuration des E/S du poignet X32 54Configuration du connecteur mini E/S X12 62Configuration du connecteur X32 E/S du poignet 62Configuration, connexion X11 61Coupleur KCP 11Coupleur KCP, visualisation 55Course d'arrêt 23, 25Course de réaction 23Course de freinage 23
DDéclaration de conformité 22Déclaration de conformité CE 22Déclaration de montage 21, 22Demande d'assistance 63Description du produit 5Défaut des freins 33Diagramme de signaux 47Dimensions 18Directive basse tension 22Directive CEM 22, 40Directive Machines 22, 40Dispositif d'ARRET D'URGENCE 30Dispositif d'ARRET D’URGENCE 29, 33Dispositif d'homme mort 27, 30, 33Dispositif de protection 45Dispositifs de protection, externes 32Données de base 17
EElimination 39EN 60204-1 41EN 61000-6-2 41EN 61000-6-4 41EN 614-1 41EN 954-1 15EN ISO 10218-1 40EN ISO 12100-1 40EN ISO 12100-2 40EN ISO 13849-1 40EN ISO 13849-2 40EN ISO 13850 40Entraînements ARRET 10, 27Entraînements MARCHE 10, 27Entrées qualifiantes 27, 36Enveloppe d'évolution 23, 25Enveloppe de l'axe 23Equipement de protection 31ESC 27Exemple de câblage X12 53Exemple de circuit X11 14Exploitant 23, 24
71 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
72 / 75
KR C2 sr
FFiltre secteur 8Fonctions de protection 33
IIdentification CE 22Identifications 32Intégrateur d'installation 23Intégrateur de système 23, 24Intégrateur système 22Interrupteur d' ARRET D'URGENCE 29Interrupteur d' ARRÊT D'URGENCE 27Interrupteur d'ARRET D'URGENCE 26, 29, 36Interrupteur d'homme mort 30Interrupteur d’homme mort 11, 31Interface X11 47Interface, X31 14Interfaces 12
KKCP 23, 33KUKA Control Panel 9, 18
LLogiciel 5, 21Logique de sécurité 5, 27
MMaintenance 38Manipulateur 5, 21, 23, 25Manuel Vitesse Elevée 28Manuel Vitesse Réduite 28Matières dangereuses 39Mesure rapide 14Mesures générales de sécurité 33Mise en place de la commande du robot 60Mise en service 35, 59Mise en service, aperçu 59Mise hors service 39Mode automatique 38Mode manuel 37Mode pas à pas 31, 33Modes de fonctionnement 27Modes, sélecteur 10, 27
NNiveau de performance 26, 55Niveau Panique 30Normes et directives appliquées 40
OOccupation des broches des connecteurs X31 14Options 5, 21
PPanneau de raccordement 5Pannes 34Paramètres machine 36Pare-feu 36Pavé numérique 10
PC de commande 5, 6Personnel 23Pertes en puissance 17PL 55Plaque signalétique 11Position de transport 34Positionneur 21Protection opérateur 27, 28, 33
RRaccordement secteur 44Réactions de stop 26Remise en service 35, 59Réparations 38Responsabilité 21Riser 7Robot industriel 21Robot industriel, aperçu 5
SSAV KUKA 63Sécurité 21Sécurité du réseau 36Sécurité, généralités 21Sélecteur de mode 27Simulation 37Single Point of Control 39Souris externe 34Space Mouse 10SSB-GUI 10Stockage 39STOP 0 23, 26STOP 1 23, 26STOP 2 23, 26Surcharge 33
TT1 23, 28T2 23, 28Table tournante/basculante 21Termes, sécurité 23Touche d'entrée 10Touche de sélection de fenêtre 10Touche Echap 10Touche Start 10, 11Touche Start en arrière 10Touche STOP 10Touches curseur 10Touches d'état 10Touches de menu 10Touches programmables 10Transport 34, 57Travaux d'entretien 38Travaux de nettoyage 38
UUnité de puissance 5, 8Unité linéaire 21Utilisateur 23, 24Utilisation conforme aux fins prévues 21Utilisation, non conforme 21
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
Index
Utilisation, non prévue 21
VValeurs PFH 55Ventilateur 8Verrouillage de dispositifs de protection sé-parateurs 28
XX11 Brochage 48
ZZone de danger 23Zone de protection 23, 25
73 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

74 / 75
KR C2 sr
Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr

75 / 75Publié le: 21.12.2011 Version: Spez KR C2 sr V4 fr
KR C2 sr