-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le LAR(s)
et autres algorithmes de suivi de chemin dergularisation
Stphane Canu, Gilles Gasso et Alain Rakotomamonjy
LITISINSA de Rouen, France
St Etienne du Rouvray, [email protected]
Paris, 21 Mai 2007
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Plan de lexpos
1 Dfinition et principe du chemin de rgularisationSlection de
modle : choisir Chemin de rgularisation et parcimonie
2 Exemples de critres de type `1
3 le LAR(s)Le principeLalgorithme du LARLARS et LASSO
4 SVRPrincipe
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Notations
Notations
Moindres carrs
Cout : S() = y X2 = y 2
prdictions : = X =d
j=1
xjjX =
[x1x2...xj ...xd
]solution : MC = (X>X )1X>y
Ridge rgression
Pnalisation : T () = 2 =d
j=1
2j
minIRd
S() + T ()
Solution : () = (X>X + I)1X>y
(0) = MC() = 0
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Dfinition
minIRd
S() + T ()
Chemin de rgularisation de la ridge
{() | [0,]}Calcul du chemin de rgularisation :
(NEW) = ((OLD))
Point de dpart facile : (0) = MC; ou () = 0Avantages ?
efficace pour touver dans certains cas , certains S ou Ttrouver
le bon gnrique : cas non convexe
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Slection de modle : choisir
Redmarage chaud vs. chemin de rgularisation
minIRd
S() + T ()
- Tantque on a pas touv le bon 1 choisir un 2 min
IRdS() + T ()
3 valuer la solution
- Pour tous les calculer systmatiquement tous les () = = () = 0
= 0 = (0) = MC
Chemin de rgularisation{()
[0,[}
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Slection de modle : choisir
exemples de chemins de rgularisation
0
0
L(a) = ||Xa y||2
P(a
) =
||a|
|2
Pareto frontierLagrangian
0
0
L(a) = ||Xa y||2P
(a)
= |a
|/(1+
|a|)
Pareto frontierLagrangian
Avantages ?efficace pour touver dans certains cas , certains S
ou Ttrouver le bon gnrique : cas non convexe
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Slection de modle : choisir
Un autre exemple : le chemin du OC SVM
exampleoneclassalpha.aviMedia File (video/avi)
exampleoneclass.aviMedia File (video/avi)
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
dans quels cas
cas favorable au chemin de rgularisation
minIRd
S() + T () {() | [0,]}
quand on sait le calculer efficacement
= linaire par morceauNEW = OLD + (NEW OLD)u
linaire par morceau
= un des critres S ou T est `1un critre `1
= parcimonie : plein de j = 0
parcimonie contraintes activesquels choix pour S et T ? Il faut
du `1
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
dans quels cas
Chemin de rgularisation linaire par morceau
cas convexe [Rosset & Zhu, 07] minIRd
S() + T ()
1 linaire par morceau : lim0
(+ ) ()
= constante
2 optimalit S(()) + T (()) = 0S((+ )) + (+ )T ((+ )) = 0
3 developpement de Taylor
(+ ) ()
= (2S(())+2T (()))1T (())+O()
2S(()) = constante et 2T (()) = 0lun quadratique et lautre
linaire par morceau
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
a propos des critres `1
Le monde bouge
The Gaussian Hare and the Laplacian TortoiseComputability of `1
vs. `2 Regression Estimators.
Portnoy & Koenker 1997
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Chemin de rgularisation et parcimonie
cas favorable au chemin de rgularisation
minIRd
S() + T () {() | [0,]}
quand on sait le calculer efficacement
= linaire par morceauNEW = OLD + (NEW OLD)u
linaire par morceau
= un des critres S ou T est `1un critre `1
= parcimonie : plein de j = 0
parcimonie contraintes activespourquoi `1 entraine til de la
parcimonie ?
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Chemin de rgularisation et parcimonie
Dfinition : Ensemble dhomognit forte (variables)
I0 ={
i {1, ...,d} i = 0}Thorme
Rgulier si S() + T () drivable en 0 et si I0(y) 6=
> 0, y B(y, ) tel que I0(y) 6= I0(y)
Singulier si S() + T () NONdrivable en 0 et si I0(y) 6=
> 0, y B(y, ) on a I0(y) = I0(y)Critre singulier = parcimonie
Nikolova, 2000critres `1 ?
la singularit entraine la parcimonie
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Chemin de rgularisation et parcimonie
cas favorable au chemin de rgularisation
minIRd
S() + T () {() | [0,]}
quand on sait le calculer efficacement
= plein de j = 0NEW = OLD + (NEW OLD)u
calculer ufaire voluer lensemble I0 = {j |j = 0}
algorithme de type contraintes actives quelques exemples de
critres `1 ?
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
le Lasso
Lasso et Basis pursuit
minIRd
y X2 + d
i=1
|i |
minIRd
y X2
avecd
i=1
|i | t
minIRdd
i=1
|i |
avec y X2
Tibshirani,1996 ; Chen, Donoho & Saunders, 1999 (Basis
pursuit) ;Donoho et al., 2004 - Tropp 2004
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
le Lasso
LASSO et parcimonie
{minIR2
S() = y X2
avec T () = |1|+ |2| t
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR
Support vector regression - SVR
Minimise le cout -insensible avec une rgularisation `2
= max(0, |y X| )minIRd
122 + C
ni=1
(+i + i )
avec 1I y X 1I + +et 0 +; 0
Vapnik, 1995
dualit variable - exemplesparcimonie par rapport aux
exemples
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
SVR et parcimonie (Smola & Schlkopf)L(, ,) = 122 + C
ni=1
(+i + i )
n
i=1
+i (y X +i )n
i=1
i (y + X i ) + ...
=n
i=1
(+i i )x>i f (x) =n
i=1
i x>i x
i ; +i = i = 0parcimonie par rapport aux exemples
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
Model selection
Choose the "correct" values of hyperparameters (or ) and
Illustration : tube width = 0.25
Pareto front
0 0.5 1 1.50
1
2
3
4
5
Penalty
Loss
Pareto front
Too smooth solution
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1 = 0.25 and = 100
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
Model selection
Choose the "correct" values of hyperparameters (or ) and
Illustration : tube width = 0.25
Pareto front
0 0.5 1 1.50
1
2
3
4
5
Penalty
Loss
Pareto front
Better solution
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1 = 0.25 and = 0.01
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
Model selection
Choose the "correct" values of hyperparameters (or ) and
Illustration : tube width = 0.05
Pareto front
0 2 4 6 80
2
4
6
8
10
12
14
Penalty
Loss
Pareto front
Too smooth solution
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1 = 0.05 and = 72.2081
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
Model selection
Choose the "correct" values of hyperparameters (or ) and
Illustration : tube width = 0.05
Pareto front
0 2 4 6 80
2
4
6
8
10
12
14
Penalty
Loss
Pareto front
Convenient solution
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1 = 0.05 and = 1.2328
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
SVR daprs Smola & Schlkopf
Model selection
Choose the "correct" values of hyperparameters (or ) and
Illustration : tube width = 0.05
Pareto front
0 2 4 6 80
2
4
6
8
10
12
14
Penalty
Loss
Pareto front
Not enough smooth solution
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1 = 0.05 and = 0.031623
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Dantzig selector
Le Dantzig selector
minIRd
1avec
X>(X y) 1ICest de la programmation linaire
minIRd ,uIRd
di=1
ui
avec u u; 0 uet 1I X>(X y) 1I
Candes & Tao, 2004
pnalisation `1 - Fidlit `
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Synthse des critres
rgulier vs. singulier
S() T () Rgression Discrimination
sing. sing.`1Dantzig Selector
LP SVRLP SVM
reg. sing.`1LASSOLARS
rgressionlogistique L1
sing. reg. `2 SVR SVM
reg. reg. `2 Ridgergression logistique
Lagrangien SVM
TAB.: SVM et SVR : support vector machine et support
vectorregression. LP linear programming, LARS Least angle
regressionstagewise.
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Synthse des critres
comparaison empirique
Discussion of the Dantzig selector" Efron, Hastie &
Tibshirani 2007
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Plan de lexpos
1 Dfinition et principe du chemin de rgularisationSlection de
modle : choisir Chemin de rgularisation et parcimonie
2 Exemples de critres de type `1
3 le LAR(s)Le principeLalgorithme du LARLARS et LASSO
4 SVRPrincipe
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Notations
Notatons
tout est centr - variables explicatives standardises
ni=1
yi = 0n
i=1
xij = 0n
i=1
x2ij = 1 j = 1,d
Moindres carrs
Cout : S() = y X2 = y 2
prdictions : = X =d
j=1
xj jX =
...
x1x2...xj ...xd...
solution :
S() = 0 X>(y ) corrlations
= 0 MC = (X>X )1X>y
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Les mthodes de rfrences
une mthode itrative constructive
le LASSO [Tibshirani 96]minIRd
S() = y X2 = y 2
avec T () =d
j=1
|j | t
Forward Stagewise regression [Weisberg 80]
new old + sign (cj) xjj = argmaxj=1,d |cj | c = X>(y ) =
S()
Stagewise = la politique des petits pas
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Les mthodes de rfrences
Forward Stagewise regression
1 initialisation : = 0 : rsidus : y X = y2 trouver le prdicteur
xj le plus corrl avec le rsidu :
maxj=1,d
|c| avec c = X>(y X)
3 j j + avec = sign(cj)
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Les mthodes de rfrences
Chemin de rgularisation (Hastie 05)
LASS0 Forward Stagewise regression
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR et Stagewise [Efron et al. 04]
LAR = Stagewise + optimal et variable
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
une mthode itrative constructive
0 = 00 = X0 = 0
1 0 + 1w11 0 + 1x1
2 1 + 2w22 1 + 2u2
w1 =
0...01 j10...0
w2 =
...0a j10...0b j20...
une approche de type contraintes active A lensemble des
variables actives
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR : corrlation et gomtrie (V. Guigue)
volution de la solution dans lespace des variables
X3
f 0
y
X2
X1
A
Dpart : tous les nuls
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR : corrlation et gomtrie (V. Guigue)
volution de la solution dans lespace des variables
X3
f 0
y
X2
R
uA
A
X1
Projection du rsidu sur la variable active
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR : corrlation et gomtrie (V. Guigue)
volution de la solution dans lespace des variables
X3
uA
f 1f
0
y
X2A
X1
Calcul du pas, qui-correlation entre le rsidu et deux
variables
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR : corrlation et gomtrie (V. Guigue)
volution de la solution dans lespace des variables
X3
X2R
f 1f 0
y
uAX1
A
Projection du rsidu sur les variables actives
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Le principe
LAR : corrlation et gomtrie (V. Guigue)
volution de la solution dans lespace des variables
X3
uAf 1f 0
y
X2
f 2
X1
A
Calcul du pas
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Lalgorithme du LAR
Lalgorithme du LAR
A = lensemble des variables intressantes
k+1 k + wk+1 IRd
A A + wA IRcard(A)d A = k (A)
k+1 k + uk+1 IRn u = Xw = XAwA
le LAR1 trouver la variable ajouter j : A = A {j}2 calculer la
direction de descente (w,u = Xw = XAwA)3 calculer le pas de
descente
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Lalgorithme du LAR
Lalgorithme du LARS
A A + kwAk+1 k + kuk {1, ...,d} = A A
c
1 trouver la variable ajouter j : maximise le gradient
j = argmaxjAc |Ac S()| = |X>Ac (y)| ; A = A j
2 la direction de descente : mthode du second ordre
wA = H1 AS()AS() = X
>A (y ) = c 1IA
H = X>AXA(X>AXA
)wA = 1IA
3 calculer le pas de descente
pour concerver la proprit : X>A (y ) = c 1I
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Lalgorithme du LAR
que doit on calculer pour chaque opration
1 trouver la variable ajouter j : O(n(d k))|X >A (y )|
2 la direction de descente : mise jour (Choleski update)
XA = XA sjXj sj = sign(cj)(X>AXA
)wA = 1IA O(nk + k2)
3 calculer le pas de descente , O(n(d k)) trouver la prochaine
variable ajouter
X>A (y ) = c 1I c = maxjAc |x>j (y )|
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Lalgorithme du LAR
Calcul du pas > 0 qui concerve lquicorrlationDu cot de
lensemble des variables actives
X>A (y k+1) = X>A (y k u) (1)= X>A (y k ) X>Au) (2)=
c1I 1I (3)
Chaque composante du vecteur des corrlations vaut : c c =
max
jAc|x>j (y k+1)| (4)
= maxjAc|x>j (y k )
cj
x>j uaj
| (5)au maximum j
c ={
cj ajcj + aj = minjAc
+
(c cj1 aj ,
c + cj1 + aj
) : le plus petit rel positif pour quune variable intgre A
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Lalgorithme du LAR
volution de la corrlation
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
LARS et LASSO
Adaptation du LAR au LASSOminIRd
S() = y X2 = y 2
avec T () =d
j=1
|j | t
si j tel que j change de signealors on prend tel que j = 0 et
cette composante quittelensemble actif AThorme 1Avec la
modification dcrite ci-dessus,
le LARS donne les solutions du LASSO
les solutions = le chemin de rgularisation (t)
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
LARS et LASSO
Le chemin de rgularisation - Thorme 7
(t) = (t0) (t t0)AASAwA1 (t) = argminy XASA2 avec
A
sjj = t
2 L(, ) = y XASA2 + (
A sjj t)
L(, ) = S>AX>A(y XASA
)+ SA1I = 0
3 L(t1)L(t2) = S>AX>AXASA((t2)(t1)
)+(12)SA1I
(t2) (t1) = (1 2)SA(X>AXA
)11I4 sA
((t2)(t1)
)= t2t1 = (12)A1A ; A1A = 1I>
(X>AXA
)11I5 (t2) (t1) = (t1 t2) AA SA
(X>AXA
)11I wA
...est linaire par morceau
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Bilan sur le LAR(s)
Bilan sur le LAR(s)
Rsumons nous
LARS est efficace
LARS = LASSO, LARS = stagewise
problmes de stabliti utiliser plutt le LARS stagewise
calcule vite le chemin de rgularisation point de dpart de
nouvelles recherches
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Plan de lexpos
1 Dfinition et principe du chemin de rgularisationSlection de
modle : choisir Chemin de rgularisation et parcimonie
2 Exemples de critres de type `1
3 le LAR(s)Le principeLalgorithme du LARLARS et LASSO
4 SVRPrincipe
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
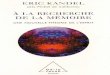
Support Vector Regression
Classical SVR (-SVR)-insensitive loss + L2 penalty
f = arg minf
1N
Ni=1
max(0, |yi f (xi , )| ) + 2f2
: width of the tubeProblems : choice of and the regularization
parameter
3 2 0 + +2 +30
0.5
1
1.5
2
Residuals: r = yf(x)
in
sens
ible
lost
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
Data
True function
Tube
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
Support Vector Regression
Repartition of the training pointsL : yi f (xi) < , i = 1, i
= 0 hors du tubeR : yi f (xi) > , i = 0, i = 1 hors du tubeC :
|yi f (xi)| < , i = 0, i = 0 dans le tubeEL : yi f (xi) = , 0 i
1, i = 0 sur le tubeER : yi f (xi) = , i = 0,0 i 1 sur le tube
Chemin de rgularisation : trouver comment les points xicirculent
entre ces ensembles en lien avec et
3 2 0 + +2 +30
0.5
1
1.5
2
Residuals: r = yf(x)
in
sens
ible
lost
L R
CE ERL
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8 = 0.1 and = 1.6681
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
Support Vector Regression
Repartition of the training pointsL : yi f (xi) < , i = 1, i
= 0 hors du tubeR : yi f (xi) > , i = 0, i = 1 hors du tubeC :
|yi f (xi)| < , i = 0, i = 0 dans le tubeEL : yi f (xi) = , 0 i
1, i = 0 sur le tubeER : yi f (xi) = , i = 0,0 i 1 sur le tube
Chemin de rgularisation : trouver comment les points xicirculent
entre ces ensembles en lien avec et
3 2 0 + +2 +30
0.5
1
1.5
2
Residuals: r = yf(x)
in
sens
ible
lost
L R
CE ERL
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8 = 0.1 and = 1.6681
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
Derivation of the -path
Regression function :f (x) = 1
(mi=1 (
i i)k(xi , x) + 0
)At step t : f t(x) associated to t and ELt , ERt , Ct , Lt and
RtFor < t , suppose the sets unchanged. Thus
f (x) = f (x) t f t(x) + t f t(x)=
iEL tERt
(i i) k(xi , x) + 0 + t f t(x)
= t unknowns variations of the parameters.Sets unchanged two
consequences for the points on thetube
j ELt , yj f t(xj) = t and yj f (xj) = j ERt , yj f t(xj) = +t
and yj f (xj) = +
Optimality conditions : ()>1=0 and (+)>1=0
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
Derivation of the -path
Tiding all these informations, we have a linear square system
of|EL|+ |ER|+ 2 unknowns i , with i EL, i with i ER,0 = b tbt and d
= tt
A = ( t)z
Piecewise linear variation of the parameters
Parameter variations : = t + ( t)A1z and are piecewise linear in
Bias b and width of the tube are piecewise linear in 1/
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Principe
Determination of next - Algorithm
Detection of the points move between the setsPoints xi on the
tube move inside or outside
From EL to L : i = 1 From ER to R : i = 1From EL or ER to C : i
= 0 or i = 0
Points xi inside or outside move on the tubeFrom L to EL : f
(xi) = yi + From R to ER : f (xi) = yi From C to EL or ER
Algorithm1 Fix - Initialize and the sets2 Solve the linear
system3 Detect the points move and deduce the next value of 4
Update the parameters and the sets5 Run from 2 until a termination
criterion is reached
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Historique
2000 Homotopy [Osborne et al.]
2003 LARS [Efron et al.]
2004 SVM [Hastie et al., Bach et al.]
2004 cas gnral : linaire par morceau [Rosset et al.]
2004-06 cas non linaire : prdiction correction [Friedman el
al.]
2004-06 Traitement de nombreux cas particuliersKernel LARS
[Guigue et al.] SVM [Loosli et al.] SVR [Gasso et al.]OC SVM
[Rakotomamonjy et al.]Laplcian SVM (semi supervis) [Gasso et
al.]
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Conclusions & perspectives
Chemin de rgularisationun algorithme efficaceparcimonie - n
taille moyennelimites de lapproche
instabilitquand sarrternon convexit
Comressive imaging[Baraniuk et al, 2006]
Perspectivespassage lchelle : approches stochastiqueinstabilit -
couplage avec les contraintes activesquand sarrter ? : borne
adaptectritres non convexes : linatrisation par morceau
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Questions
Questions ?
Des questions ?
LAR(s) (et svmpath) en R www-stat.stanford.edu/~hastieMatlab
asi.insa-rouen.fr/~vguigue/LARS.html
kernlab
cran.r-project.org/src/contrib/Descriptions/kernlab.htmlSVR Matlab
asi.insa-rouen.fr/~arakotom
Danzig selector www.l1-magic.org/
-
Introduction Dfinition et principe Exemples `1 le LAR(s) SVR
Conclusion
Questions
biblio
Least Angle Regression. Least angle regression, Bradley Efron,
Trevor Hastie,Iain Johnstone and Robert Tibshirani ; Annals of
statistics, vol. 32 (2),pp.407-499, 2004A tutorial on support
vector regression, A. Smola and B. Scholkopf, Statistics
andComputing 14(3), pp 199-222, 2004The Dantzig selector :
Statistical estimation when p is much smaller than n,Emmanuel
Candes and Terence Tao Submitted to IEEE Transactions onInformation
Theory, June 2005.Two-Dimensional Solution Path for Support Vector
Regression, Gang Wang,Dit-Yan Yeung, Frederick H. Lochovsky, ICML,
2006Piecewise Linear Regularized Solution Paths, Saharon Rosset, Ji
Zhu. Annals ofStatistics, to appear, 2007Algorithmic linear
dimension reduction in the l1 norm for sparse vectors, A.
C.Gilbert, M. J. Strauss, J. A. Tropp, and R. Vershynin, 2006
(submitted).An iterative thresholding algorithm for linear inverse
problems with a sparsityconstraint, I. Daubechies, M. Defrise and
C. De Mol, Comm. Pure Appl. Math,57, pp.1413-1541, 2004.Local
strong homogeneity of a regularized estimator, Mila Nikolova,
SIAMJournal on Applied Mathematics, vol. 61, no. 2, pp. 633-658,
2000.
Introduction
Dfinition et principe du chemin de rgularisationSlection de
modle : choisir Chemin de rgularisation et parcimonie
Exemples de critres de type 1
le LAR(s)Le principeL'algorithme du LARLARS et LASSO
SVRPrincipe
Conclusion