Embed Size (px)
Citation preview

UNIVERSITE DE DROIT D’ECONOMIE ET DES SCIENCES DE PAUL CEZANNE (Aix-Marseille III)
Institut Fresnel
Habilitation à Diriger des Recherches
Spécialité : Génie informatique, automatique et traitement du signal
Présentée par
Mouloud ADEL
De l’image industrielle à l’image médicale : analyse de texture, débruitage & segmentation
Soutenance publique prévue en juillet 2008
Devant la commission d’examen :
Marc ACHEROY: Professeur à l’Ecole Royale Militaire de Bruxelles Salah BOURENNANE : Professeur à l’Ecole Centrale de Marseille Eric MOREAU : Professeur à l’Université du Sud Toulon Var Michel PAINDAVOINE : Professeur à l’Université de Bourgogne Monique RASIGNI : Professeur à l’Université Paul Cézanne de Marseille
Didier WOLF : Professeur à l’Institut National Polytechnique de Lorraine

2
A ma grand-mère décédée cette année A mes parents A ma femme et mes enfants A mon frère et sa famille A toute ma famille A ma belle famille

3

4
Remerciements Le travail présenté dans ce document est la synthèse de mes années d’enseignement à
l’Institut Universitaire de Technologie de Marseille (département Génie Electrique et
Informatique Industrielle de Salon de Provence) et de recherche au sein des différents
laboratoires (Interface Physique-Biologie-Médecine et l’Institut Fresnel) de l’Université Paul
Cézanne Aix-Marseille III.
Je tiens à remercier Philippe REFREGIER pour m’avoir accueilli au sein de l’institut Fresnel
au tout début de ma carrière.
Je voudrais remercier tout particulièrement Monsieur et Madame RASIGNI pour m’avoir
ouvert les portes de leur laboratoire, pour la confiance qu’il m’ont toujours m’accordée et la
passion de la recherche qu’il ont su me transmettre.
Mes remerciements vont aussi au Professeur Salah BOURENNANE Responsable de l’équipe
GSM pour m’avoir donné la possibilité d’intégrer son équipe. Qu’il soit remercié aussi pour
ces dernières années passées dans l’équipe, où il a toujours su me prodiguer de précieux
conseils et me soutenir dans mes activités de recherche.
Mes remerciements vont à toute l’équipe GSM, collègues (Stéphane Derrode, Thierry Gaidon,
Mireille Guillaume, et Ali Khalighi) et étudiants.
J’adresse mes vifs remerciements et ma gratitude aux membres du jury pour m’avoir fait
l’honneur d’accepter de juger mon travail d’enseignant-chercheur.
Marc ACHEROY Professeur à l’Ecole Royale Militaire de Bruxelles, Salah BOURENNANE
Professeur à l’Ecole Centrale de Marseille, Eric MOREAU Professeur à l’Université du Sud
Toulon Var, Michel PAINDAVOINE Professeur à l’Université de Bourgogne, Monique
RASIGNI Professeur à l’Université Paul Cézanne de Marseille et Didier WOLF Professeur à
l’Institut National Polytechnique de Lorraine.
Je me dois également de remercier mes collègues du Département GEII de Salon de Provence
pour leur soutien.
Enfin ces remerciements ne seraient pas complets sans y associer ma femme Nabila et mes
enfants Yanis et Wassim. Leur soutien ces derniers temps m’a beaucoup touché et aidé. Qu’ils
soient remerciés pour leur patience.

5
Sommaire
Curriculum vitae p. 7
- Activités d’enseignement p. 9
- Activités d’encadrement p. 11
- Publications scientifiques p. 14
- Collaborations Nationales et internationales p. 17
- Activités de responsabilités collectives et administratives p.18
Synthèse des travaux de recherche p. 22
- Introduction générale p. 23
♦ Chap. 1 : Analyse de texture pour l’inspection de surface p. 28
1.1 Introduction p. 28
1.2 Décomposition de la matrice de cooccurrence p. 30
1.3 Discrimination de texture par décomposition orthogonale p. 32
1.4 Conclusion p. 41
♦ Chap. 2 : Réduction de bruit dans les images par utilisation p. 44
de fonctions de modification du contraste local
2.1 Introduction p. 44
2.2 Nature du bruit radiographique p. 44
2.3 Débruitage par utilisation de fonctions de modification p. 46
du contraste
2.4 Evaluation de la méthode développée p. 50
2.5 Optimisation de la méthode p. 59
2.6 Application au contrôle qualité des installations p. 67
mammographiques traitement d’images

6
2.7 Conclusion p. 81
♦ Chap. 3 : Segmentation statistique de régions d’intérêt p. 84
3.1 Introduction p. 84
3.2 Segmentation ‘’régions’’ et théorie statistique du signal p. 85
3.3 Champs de Markov et segmentation Bayesienne p. 88
3.4 Segmentation des images mammographiques p. 92
3.5 Segmentation des angiographies rétiniennes p. 103
3.6 Conclusion p. 133
♦ Conclusion générale et projet de recherche p. 141

7
CURRICULUM VITAE

8
ETAT CIVIL
Nom : ADEL
Prénom : MOULOUD
Date et lieu de naissance : 3/11/1966 à Alger
Nationalité : Française
Situation de famille : Marié, 2 enfants
Adresse : Le Domaine des Oliviers, Villa n° 3
71, Chemin du four de buze 13014 Marseille
Domicile: 04 91 47 23 96 Bureau: 04 91 28 84 97 Portable : 06 72 53 01 85
Email : [email protected]
CURSUS UNIVERSITAIRE ET DIPLOMES
Juin 84 Bac C (Mention Bien) au Lycée Ezzyania à Cherchell (Algérie)
84-87 Mathématiques Supérieures et Spéciales M au Lycée Condorcet (Paris)
Admission à L'ENSEM de Nancy (Ecole Nationale Supérieure d 'Electricité et
de Mécanique), à l'issue du concours M des ENSI
87-90 Elève Ingénieur à l'ENSEM,
Licence et Maîtrise de Mécanique
Juin 90 Obtention du Diplôme d'Ingénieur ENSEM, Option : Electronique -
Automatique
DEA de Métrologie Electrotechnique Automatique Option : Automatique
Janvier 94 Docteur de l'INPL (Institut National Polytechnique de Lorraine)
Option : Automatique (Mention T.H avec les Félicitations du Jury)
Septembre 94 Maître de Conférences (61ème section) à l’IUT de Marseille. Département
Génie Electrique et Informatique Industrielle délocalisé de Salon de Provence
AFFECTATION ACTUELLE Affectation Recherche : Institut Fresnel, Equipe GSM, UMR CNRS 6133.
Affectation Enseignement : IUT de Marseille (Département Génie Electrique et
Informatique Industrielle) délocalisé de Salon de Provence.

9
ACTIVITES D’ENSEIGNEMENT
La totalité de mes enseignements est effectuée au sein du département Génie Electrique et
Informatique Industrielle de Salon de Provence. Ce département dépend de l’IUT de
Marseille. J’interviens en 2ème année d’IUT et en licence professionnelle SARI (Systèmes
automatisés et réseaux industriels) sur les thématiques suivantes :
- Asservissements linéaires et non linéaires continus (20H Cours, 20 H TD, 24 H
TP).
- Asservissements linéaires échantillonnés (16 H Cours, 24 HTD, 16H TP).
- Simulation de systèmes (8H TP).
- Traitement du signal (20H TD).
- Automatismes commandés par Automates Programmables Industriels (8H
Cours, 12H TD, 52 H TP).
- Instrumentation virtuelle (32 H de projet).
Les deux premières années qui ont suivi mon recrutement (1994-1996) ont été entièrement
consacrées à la mise en place de l’enseignement théorique et pratique de l’automatique au
sein du département (la première promotion du département sortait en Juin 1995). La tâche
qui m'incombait était d’autant plus lourde que l’on a démarré avec des locaux vides. Il a
fallu :
Mettre en place un enseignement d'automatique : Asservissements linéaires continus,
Asservissements non linéaires et Asservissements échantillonnés (Cours et Travaux
Dirigés).
Mettre en place un enseignement de commande de systèmes séquentiels par Automates
Programmables Industriels (Cours et Travaux dirigés).
Participer à l'enseignement de l'électronique et du traitement du signal (Travaux Dirigés
et Travaux Pratiques).
Acheter le matériel nécessaire puis monter les séances de Travaux pratiques
d'Asservissements et d'Automates Programmables Industriels (A.P.I).
La mise en place des travaux pratiques a nécessité l’élaboration de 7 TP d’asservissements et
de régulations ainsi que 5 TP d’Automates Programmables Industriels (API) les deux

10
premières années. Les deux années qui ont suivi ont permis de compléter les thèmes de
travaux pratiques de régulation et d’API pour être conforme avec l’objectif du nombre de TP
que l’on s’était fixé pour l’option Automatismes et Systèmes à savoir 10 T.P
d'asservissements et 8 T.P d'Automates Programmables Industriels (A.P.I).
Pour donner aux étudiants un aperçu assez large des applications de régulation dans
l’industrie, j’ai choisi de répartir les travaux pratiques de régulation et asservissements comme
suit :
2 TP de simulation de systèmes (Matlab et Simulink)
6 TP de régulations analogiques (température, niveau, position, vitesse, identification,
régulateur P.I.D industriel)
2 TP de régulations numériques (vitesse et position à base de microcontrôleur
ATMEL)
En ce qui concerne les travaux pratiques d’automates programmables industriels, la
répartition est la suivante :
2 TP d’initiation au PL7-2 sur des automates TSX17-20 de Télémécanique
4 TP sur un concept de maquette d’usine automatisée
2 TP sur la mise en réseau d’automates et application à la supervision.
Les changements successifs (tous les 4 ans) des programmes d’IUT élaborés par la
Commission Pédagogique Nationale, m’ont conduit à réactualiser le contenu des cours, TD et
TP. Cet enseignement a donné lieu à la rédaction de 3 polycopiés de cours, 2 polycopiés de
TD et 3 polycopiés de Travaux pratiques ainsi qu’un support de cours de 250 transparents.
La mise en place de la licence professionnelle SARI m’a donné la possibilité de diversifier
mes enseignements. Sortant de la sphère de l’automatique, je suis aussi intéressé à
l’instrumentation virtuelle par l’intermédiaire du logiciel LABVIEW. Je participe avec un
intervenant industriel, à l’enseignement (TP et projets) de ce logiciel et à ses diverses et
nombreuses applications en acquisition de données, commande temps réel, élaboration
d’interfaces homme machine et conduite et supervision des systèmes.
Dans le cadre de mes différentes participations au Colloques Pédagogiques Nationaux, j’ai eu
à publier dans la revue G.E.S.I des départements G.E.I.I l’article suivant :
Mouloud Adel, Christophe Pellegeay, Stéphane Aubert, ’’Asservissement numérique de
vitesse d’un moteur à courant continu autour du microcontrôleur AT90S8535’’. GESI, juin
2005.

11
ACTIVITES D’ENCADREMENT I- Thèses de doctorat en Sciences [1] Angela BARTHES (Financement APHM): ″ Analyse automatique d’angiographies rétiniennes au cours de la dégénérescence maculaire liées à l’âge ″. Thése de l’université d’Aix-Marseille III, soutenue le 28 Janvier 2000 (Co-encadrement 30%). Direction de thèse Monique Rasigni. [2] Vincente GUIS (Bourse MENRT) : ″ Traitement numérique d’images de fantômes mammographiques : Application au contrôle qualité des installations radiologiques et à
l’aide au diagnostic de cancer du sein ″. Thèse de l’université d’Aix-Marseille III, soutenue le 27 Septembre 2002 (Co-encadrement 50%). Direction de Thèse Monique Rasigni. [3] Choukri MEKKAOUI (Financement APHM):″ Les signaux cardiaques et Vasculaires Caractéristiques de l’écoulement sanguin in vivo chez le porc : acquisition, modélisation
mathématique et signification physique des conséquences physiologiques des
thérapeutiques interventionnelles ″. Thèse de l’université d’Aix-Marseille III, soutenue le 27 septembre 2003 (Co-encadrement 30%). Direction de thèse Monique Rasigni. [4] Abdelkader HADDOUCHE (1/2 ATER) : ″ Segmentation par une approche statistique de la zone avasculaire centrale sur des angiographies numériques ″. Thèse de l’Université Paul Cézanne, Marseille, soutenue le 29 septembre 2005 (Co-encadrement 50%). Direction de thèse Monique Rasigni [5] Nadine RENARD (Bourse DGA) : ″ Traitement du signal tensoriel et application à l’imagerie hyperspectrale ″. Soutenance prévue octobre 2008. (Co-encadrement 30%). Direction de thèse Salah Bourennane.
[6] Aicha MOUSSAOUI (Bourse Fondation Shlumberger) : ″ Traitement d’images appliqué à la coronarographie en imagerie biomédicale ″. Soutenance prévue décembre 2009. (Co-encadrement 50%). Direction de thèse Salah Bourennane et Latifa Hamami. II- DEA Optique Signal et Image [1] Sébastien ALLAM : ″ Etude d’une nouvelle méthode d’analyse de texture : Décomposition orthogonale des matrices de cooccurrences ″. DEA Optique Signal et Image, soutenu en Juin 1996 (encadrement 50%). [2] Anne Catherine CARILERRO ″ Détection d’objets dans les images bruitées. Application à la localisation d’inclusions sur des images numérisées de clichées
mammographiques ″. DEA Optique Signal et Image, soutenu en Juillet 1998 (encadrement 50%). [3] Vincente GUIS : ″ Contrôle de qualité des installations mammographiques. Détection des masses dans les images numérisées de fantômes ″. DEA Optique Signal et Image, soutenu en Juillet 1999 (encadrement 60%).

12
[4] Pacôme D’ENTRAYGUES : ″ Extraction de zones d’intérêt sur des mammographies ″. DEA Optique Signal et Image, soutenu en Juillet 2002 (encadrement 60%). [5] Daniel ZUWALA : ″ Rehaussement de contraste dans les images mammographiques de fantôme du sein ″. DEA Optique Signal et Image, soutenu en Juillet 2003 (encadrement 60%). [6] Abderrahim ALLAOUI : ″ Segmentation d’images mammographiques par approche Markovienne″. Optique Signal et Image, soutenu Juillet 2004 (encadrement 70%). [7] Grégoire BEZOT : ″ Segmentation de l’arbre vasculaire dans des images médicales : application à l’angiographie rétinienne et à la coronarographie″. Optique Signal et Image, soutenance prévue Juillet 2007 (encadrement 50%). III- Stages de formation à la recherche [1] Gilles DELESTRADE : ″ Programmation de méthodes de segmentation par régions : Application à des images mammographiques numérisées ″. Maîtrise de Physique Appliquée, Mars - Juillet 2001. [2] Nicolas CHAPON : ″ Conception d’un algorithme par contour actif pour l’aide au diagnostic dans le cadre du cancer du sein ″. Maîtrise de Physique Appliquée, Mars - Juillet 2002. [3] Olivier VALLAT : ″ Détection semi-automatisée de la zone avasculaire centrale par une méthode de croissance de régions ″. DESS Analyse de la vision, Mars - Juillet 2002. [4] Jafaar ERRADJI : ″ Développement d’outils logiciels pour le contrôle qualité des images mammographiques ″. Stage Ingénieur Ecole Nationale Supérieur de Physique de Marseille, Mars - Juillet 2003. [5] Vincent MALOSSE : ″ Développement d’outils logiciels pour le contrôle qualité et l’aide au diagnostic des cancers du sein pour les radiologues ″. Stage IUT, Mars - Juillet 2005. [6-8] Laurence JOSSE, Julia TRICOT, Cyrielle SIMEONE : ″ Mise en œuvre d’un
algorithme de lissage et de segmentation d’images mammographiques basé sur les
techniques de diffusion″ Projet de fin d’études en filière Informatique Signal et Image, Ecole
Généraliste des Ingénieurs de Marseille, Janvier - Mars 2006 [9] Jérôme BOISSEZ : ″ Implantation d’algorithmes de débruitage sur des images de fantômes mammographique en utilisant le logiciel IDL″. Stage IUT, Avril - Juillet 2006. [10-11] Rémi BACH, Florian JOYEUX : ″ Etude de la faisabilité d’un traitement thérapeutique automatisé de la rétine par laser et assisté par ordinateur ″. Projet de fin d’études en filière Informatique Signal et Image, Ecole Centrale de Marseille, Novembre 06- Mars 2007.

13
[12] Aken HAFSAOUI : ″ Segmentation d’images hyperspectrales en utilisant le logiciel ENVI ″ . Mastère professionnel commercialisation en instrumentation scientifique, Février 2007. [13] Nicolas TRITZ : ″ Développement d’une Interface Homme Machine pour
l’automatisation du contrôle qualité dans les sites de production mammographique″. Stage IUT, Avril - Juillet 2007. [14-15] Julie PENAUD, Naziha AIT AMEUR : ″ Recalage d’images angiographiques″. Projet de fin d’études en filière Informatique Signal et Image, Ecole Centrale de Marseille, Novembre 07- Février 2008. [16] Benjamin LEGRAND : ″ Amélioration d’une Interface Homme Machine pour
l’acquisition et le traitement d’images médicales″. Stage IUT, Avril - Juillet 2008.

14
PUBLICATIONS SCIENTIFIQUES
♦ Articles dans des Revues Internationales [1] S. Allam, M. Adel, P. Réfrégier : ″ Fast Algorithm for texture discrimination by use of a
separable orthonormal decomposition of the co-occurrence matrix ″. Applied Optics, Information Processing, 36(32), 8313-8321, 1997. [2] A. Barthes, J. Conrath, M. Rasigni, M. Adel, J. P. Petrakian : ″ Mathematical morphology
computerized analysis of angiograms in related macular degeneration ″. Medical Physics, 28, 2410-2419, 2001. [3] V. Guis, M. Adel, M. Rasigni, G. Rasigni, B. Seradour, P. Heid : ″ Adaptive neighbourhood contrast enhancement in mammographic phantom images ″. Optical Engineering, 42(2), 357-366, 2003. [4] M. Adel, V.Guis, M. Rasigni :″ Etude de la faisabilité du scorage automatique de
fantômes mammographiques par traitement d’images ″ . Innovation Technologiques en Biologie et Médecine (ITBM-RBM), 25, 313-323, 2004. [5] A. Haddouche, M. Adel, M. Rasigni, S. Bourennane : ″ Statistical method for foveal
detection in retinal angiograms ″ . Electronic Letters, 41(11), May 2005. [6] A. Rabhi, M. Adel, S. Bourennane : ″ Segmentation d’images ultrasonores par les régions
actives géodésiques ″. Innovation Technologiques en Biologie et Médecine (ITBM-RBM), 27, 8-18, 2006. [7] M. Adel, D. Zuwala, M. Rasigni, S. Bourennane : ″ Noise reduction on mammographic
phantom images ″. Electronic Letters on Computer Vision and Image Analysis, 5(4), 64-74, 2006. [8] M. Adel, D. Zuwala, M. Rasigni, S. Bourennane : ″ Enhancement of mammographic
phantom features by noise reduction ″. International Journal of Pattern Recognition and Artificial Intelligence, 21(6), 1047-1057, 2007 [10] M. Adel, M. Rasigni, S. Bourennane : ″ Statistical segmentation of regions of interest on a mammographic image ″. Eurasip Journal of Applied Signal Processing, article ID 49482, 8 pages, 2007. [11] M. Adel, D. Zuwala, M. Rasigni, S. Bourennane : ″ Filtering noise on mammographic
phantom images using local contrast modification functions″. Image and Vision Computing, accepté (2008) doi:10.1016/j.imavis.2008.02.001 [12] A. Haddouche, M. Adel, M. Rasigni, S. Bourennane : ″ Detection of the Foveal Avascular Zone on retinal angiograms using Markov Random Fields″ . Digital Signal Processing (2ème révision en cours)

15
[13] G. Bezot, M. Adel, T. Gaidon, S. Bourennane : ″ Statistical Based Linear structure detection : application to vessel detection in medical images ″ . Soumis à IEEE Transaction
on Signal Processing Letters
♦ Articles dans des Revues Nationales [14] M. Adel, D. Wolf, R. Vogrig : ″ Inspection de Surface Industrielle en Ligne : Application à la Détection de Défauts dans le Bois ″. Revue de Génie des Procédés, Capteurs en Elaboration de Matériaux, Limoge, Vol 8, 1994.
♦ Communications à des Conférences Internationales [15] M. Adel, D. Wolf, R. Vogrig, R. Husson : ″ Evaluation of Colour Spaces in Computer
Vision. Application of Wood Defects Detection ″ . IEEE International Conference on Systems, Man and Cybernetics, Le Touquet, FRANCE, Octobre 1993, Vol 2, pp: 499-504. [16] R.Vogrig, B. Karpp, J. F. Portala, M. Adel, R. Lefevre : ″ Scanning for Optimized
Lumber Ripping and Cross-Cutting ″. 5th International Conference on Scanning Technology & Process Control for the Wood Products Industry, Atlanta, USA, October
1993. [17] M. Adel, A.C. Carrilero, M. Rasigni, B. Seradour, P. Heid : ″ Quality control of
mammographic images: automated detection of microcalcifications in phantom images ″. 5th International Workshop on Digital Mammography (IWDM 2000), Toronto (Canada), 11-14 June 2000. [18] V. Guis, M. Adel, M. Rasigni, G. Rasigni, B. Seradour, P. Heid : ″ Noise reduction in mammographic images using adaptive neighbourhood contrast enhancement ″. Second International Conference on Advanced Concepts for Intelligent Vision Systems, Baden-Baden (Allemagne), 30 July -3 August 2001. [19] V. Guis, M. Adel, M. Rasigni, G. Rasigni, B. Seradour, P. Heid : ″ An adaptive enhancement filter for mammographic phantom image ″. 6th International Workshop on
Digital Mammography (IWDM 2002), Bremen (Germany), 22-25 June 2002 [20] M. Adel, M. Rasigni, G. Rasigni, B. Seradour, P. Heid : ″ An automatic scheme to breast
region segmentation ″. 6th International Workshop on Digital Mammography (IWDM 2002), Bremen (Germany), 22-25 June 2002. [21] D. Zuwala, M. Adel, M. Rasigni : ″ Noise reduction in mammographic phantom images using local contrast enhancement techniques ″. 7th International Workshop on Digital
Mammography (IWDM 2004), Duram, NC, USA, 18-21 June 2004. [22] A. Haddouche, M. Adel, M. Rasigni, S. Bourennane : ″ Détection par des methodes
statistiques des contours de la zone avasculaire centrale sur des angiograpohies rétiniennes
numériques ″ . Journées d’études Algéro-Françaises en imagerie médicale, JETIM’2004, Blida (Algérie), 29 novembre-1 décembre 2004.

16
[23] M. Adel, V.H Guis, M. Rasigni, S. Bourennane : ″ Feasibility study of automating breast
phantom scoring using image processing techniques ″. Annual Symposium on Electronic Imaging Science and Technology SPIE, Image Processing conference: Algorithms and systems IV, San José (USA), 16-20 janvier 2005.
[24] K. Haddouche, M. Adel, A. Rabhi, M. Rasigni, S. Bourennane : ″ Segmentation of the
foveal Avascular zone on retinal angiograms using bayesian approach ″. Traitement et Analyse de l’Information. Méthodes et Applications (TAIMA), Hammamet (TUNISIE), 26
Septembre-01 Octobre 2005.
[25] K. Haddouche, M. Adel, M. Rasigni, S. Bourennane : ″ Segmentation Bayesienne de la
Zone Avasculaire Centrale sur des angiographies rétiniennes ″. Journées d’études Algéro-Françaises en imagerie médicale, JETIM’2006, Alger (Algérie), 21-22 novembre 2006.
[26] A. Rabhi, A. Haddouche, M. Adel, P. Poncy, S. Bourennane, M. Dauzat : ″ Echostructure du thrombus : étude objective et quantitative préliminaire″. Journées d’études Algéro-Françaises en imagerie médicale, JETIM’2006, Alger (Algérie), 21-22 novembre 2006. [27] J. Marot, M. Adel, S. Bourennane ″ Array processing for pectoral muscle segmentation in mammographic images ″.2nd International Conference on Computer Vision Theory and Applications, 8-11 Mars 2007, Barcelona, Spain
[28] J. Marot, S. Bourennane, M. Adel, ″ Array processing approach for object segmentation in images ″ International Conference on Acoustics, Speech and Signal Processing, Honolulu, Hawaï, USA, 15-20 Avril 2007
♦ Communications et Séminaires à des Conférences Nationales [29] V. Guis, M. Adel, M. Rasigni, G. Rasigni, B. Seradour, P. Heid, ″ Contrôle de qualité d'images mammographiques: Détection automatique des masses ″. Forum des jeunes chercheurs, GDR ISIS, Paris, 16-17 Mai 2000. [30] M.Adel, V. Guis, M. Rasigni, G. Rasigni : ″ Aide au diagnostic du cancer du sein par Traitement d’image ″ . Instrumentation Optique et imagerie dans le domaine médical, POP SUD, Marseille, 3 Avril 2003. [31] M. Adel : ″ Traitement d’images appliqué aux images médicales : application au diagnostic assisté par ordinateur″ . Journées du savoir en Imagerie médicale organisées par le CNRS, Lyon, 6-8 novembre 2006.
♦ Colloques Européens avec actes [32] M.Adel : ″ Wood Analysis by Digital Image Processing ″. Workshop in Handling Automation and Inspection in Manufacturing, Bristol, ENGLAND, Décembre 1992.

17
COLLABORATIONS NATIONALES ET INTERNATIONALES
♦ Numérisation, base de données et traitement des images mammographiques
Partenaires : Laboratoire de cancérologie expérimentale (Unité INSERM) Association de recherche et de dépistage des cancers du sein et du col de l’utérus Laboratoire d’imagerie médicale (Hôpital de la Timone)
Objectifs :
Faire le choix d’un numériseur de très haute qualité afin de créer une base de donnée d’images mammographique commentée par des radiologues experts. Les paramètres de numérisation (résolution spatiale et codage en niveau de gris de pixels) ainsi que les algorithmes permettant l’amélioration du contraste des images ont fait l’objet d’un travail. Financement : Ligue nationale contre le cancer Montant : 30 000 Euros Année : 1998
♦ Contrôle qualité des installations mammographiques
Partenaires : Association de recherche et de dépistages de cancers du sein et du col de l’utérus
Objectifs :
Mettre au point des algorithmes permettant une étude de faisabilité de l’automatisation du processus de contrôle de qualité dans les installations mammographiques par traitement d’images.
Financement : Ligue régionale contre le cancer
Montant : 12 000 Euros
Année : 1999-2001
♦ Segmentation d’angiographies coronariennes
Partenaires : Laboratoire Signal et Communications : Ecole Nationale Polytechnique d’ALGER, ALGERIE
Objectifs : Développer puis tester des algorithmes de segmentation de l’arbre vasculaire coronarien. Ce projet a d’ores et déjà donné lieu à plusieurs déplacements entre l’Algérie et la France. Deux rapports ont été déjà écrits et fournis à l’organisme financeur.

18
Co-Encadrement d’une thèse financée par la Fondation Schlumberger. Tutelle Algérienne : Madame Latifa Hamami
Année : 2006-2008
♦ Détection de microcalcifications sur des mammographies numérisées
Partenaire : Group Manager Medical Image Processing Fraunhofer-Institute for Integrated Circuits IIS, Allemagne. Dr.-Ing. Thomas Wittenberg Responsable du Groupe Medical Image Processing Objectifs : Tester des méthodes de détection de microcalcifications sur une large base de données image (MIAS). Implanter des méthodes de segmentation développées dans l’équipe GSM sur des images industrielles. Deux séminaires ont été organisés (1 à Marseille et 1 à Erlangen) pour la mise en place du planning de travail, la présentation des travaux et le suivi des actions menées entre nos deux laboratoires. Année : 2006-2008
♦ Reconstruction et interprétation d’images médicales assistées par ordinateurs Partenaire : Laboratoire de Mécanique et d’acoustique UPR 7051 Financement : Projet Pluri Formations Quadriennal 2008-2011 Objetifs : Contribuer aux développements de prototypes d’imageurs automatisés pour l’œil et pour le sein entrepris depuis plusieurs années par chacun des laboratoires partenaires. Fournir une aide à la représentation multidimensionnelle (espace + paramètres physiques) des données (localisation 3D) et à l’interprétation assistée par ordinateur (segmentation automatisée). Envisager des actions thérapeutiques par délivrance localisée d’énergie (optique et/ou ultrasonore (US)). Financement : Ministère de l’Education Nationale Montant : 40 000 Euros /an Année : 2008-2011
♦ Imagerie multimodale pour l’aide au diagnostic médical. Application à la fusion X/TEP Partenaire : Laboratoire Signal et Communications, Ecole Polytechnique d’Alger Financement : Région PACA

19
Objetifs : Mise en place du projet. Réunions pour dégager des objectifs, des sujets de recherche et des encadrements doctoraux en cotutelle. Montant : 6000 Euros Année : 2009
♦ Système d’Acquisition et de thérapie laser de la rétine guidé par l’image hyperspectrale Partenaires : Hopital de la Timone, SYSMA, Quantel Medical Financement : Projet ANR Technologies pour la Santé Année : En cours d’évaluation (décision juillet 2008)

20
ACTIVITES DE RESPONSABILITES COLLECTIVES ET ADMINISTRATIVES
♦ Responsable des relations IUT-LYCEES au sein du département GEII de Salon de Provence (1998-2000). Cette tâche consiste à centraliser les forums et salons des métiers et des formations après bac se déroulant dans la région. Il faut préparer ensuite les supports de communication concernant le département GEII de Salon de Provence et enfin répartir les différentes manifestations entre les collègues. Parallèlement aux forums, je me suis aussi occupé de contacter puis d’intervenir dans les lycées du département pour proposer une présentation rapide de la formation GEII, destinée aux élèves de terminale.
♦ Responsable du recrutement des élèves de 1ère année au sein du département G.E.I.I de Salon de Provence (1999-2005). Le recrutement des élèves de 1ère année démarre avec les réunions au niveau du rectorat pour l’établissement d’un planning sur l’année en cours. A l’ouverture du site web consacré au recrutement, il faut examiner les 300 à 350 dossier afin de déterminer la liste des étudiants de la liste principale et ceux de la liste complémentaire et enfin ceux de la liste des refusés. Je m’occupe aussi du mailing pour convoquer les étudiants de la liste principale pour les entretiens que je fais passer avec quelques-uns de mes collègues. Le suivi des étudiants de la liste principale ainsi que la mailing pour le rappel de la liste complémentaire m’incombe aussi.
♦ Responsable du montage du projet de licence professionnelle SARI (Systèmes Automatisés et Réseaux Industriels) 2005. Demande de subventions, choix de l’architecture du réseau bus de terrain et du matériel équipant l’atelier automates programmable. Réunions pour la mise en place de l’orientation des modules d’automatique et d’automatismes de la licence.
♦ Co-Directeur des Etudes de la licence Professionnelle, Systèmes Automatisés et Réseaux Industriels : responsable des relations avec les entreprises depuis 2007
♦ Responsable de l’encadrement, du suivi et de l’évaluation de 5 stagiaires d’IUT par année universitaire.
♦ Responsable de la Préparation la fête de la science pour le département GEII en 2002 et 2005.
♦ Président de jury de Bac Pro EDPI (Etude et Définition des Produits Industriels) sessions 2005 et 2006.
♦ Membre titulaire élu de la commission de spécialistes 61ème - 27ème sections de l’Université Paul Cézanne (Aix-Marseille III).
♦ Titulaire d’une prime d’encadrement doctoral depuis octobre 2000, renouvelée en octobre 2004.
♦ Expert pour la revue Pattern Recognition Letters et Electronic Letters.

21
♦ Chairman de la session Signaux, Images, Parole de la conférence Nationale MAJESTIC’ 2003.

22
Synthèse des travaux de recherche

23
Introduction Générale
Outil pour les uns, discipline à part entière pour d’autres, le traitement du signal et des images
a vu son champ d’application s’élargir de façon considérable, allant de l’industrie aux
applications militaires en passant par la biologie, la médecine, l’astrophysique, la
météorologie, la robotique,…
L’amélioration des méthodes de traitement et d’interprétation a été possible grâce à l’apport et
l’adaptation de la physique et des mathématiques au traitement du signal et des images :
équations aux dérivées partielles pour le débruitage, théorie des coques pour les modèles
déformables, statistiques et modèles probabilistes pour la segmentation, …...
Transmettre tout ou partie de l’expertise humaine acquise dans un domaine reste un des défis
à relever dans les années à venir, pour les Sciences et Technologies de l’Information et de la
Communication. La vision assistée par ordinateur combinée au traitement des signaux et des
images y participent en vue de remplacer l’homme dans diverses tâches : acquisition,
localisation et interprétation.
De l’inspection de surface par vision industrielle à l’aide au diagnostic médical assisté par
ordinateur, un point commun : des images à analyser, industrielles dans le premier cas,
médicales dans le second.
Le traitement du signal et des images, associé à des systèmes d’acquisition, ne cesse de
prendre de l’importance, notamment dans l’industrie mais également dans le domaine
médical. Les productions de masse à haute cadence, le souci constant d'amélioration de la
qualité et la recherche de gain économique, poussent de plus en plus les industriels à
automatiser les moyens de production. La vision industrielle est une réponse à ces
préoccupations pour les opérations de contrôle de la production, en assurant une bonne
répétitivité du contrôle, à la différence d'un opérateur dont les critères de décision peuvent
varier.
Les cadences mises en jeu poussent les fabricants de matériel de vision (caméras, cartes
d’acquisition, processeurs de traitement) à améliorer sans cesse les performances de leurs
produits en terme de rapidité et de fiabilité. Les intégrateurs de vision doivent suivre cette
course en adaptant des algorithmes capables de détecter, d’identifier, de mesurer, d’inspecter,
et de contrôler des pièces fabriquées dans un temps imparti relativement court.
Les chercheurs ne sont pas complètement exclus de cette aventure; en effet ils en fournissent
en partie la matière première à savoir des méthodes de traitement de plus en plus élaborées,

24
robustes et rapides. C’est dans ce contexte que nous situons notre première contribution :
l’analyse de texture pour l’inspection automatique de surface.
L’analyse de texture est une thématique qui a découlé naturellement de mes travaux de thèse.
Celle-ci concernait le traitement de l’information couleur et de texture à des fins d’aide à
l’inspection automatisée de surfaces dans les industries du bois.
La texture constitue une information importante pour la caractérisation d’images, mais son
extraction met en oeuvre des techniques assez lourdes en temps de calcul. Partant de ce
constat, nous nous sommes attachés à développer une méthode d’analyse permettant la
discrimination de textures, tout en gardant un temps de calcul compatible avec une
implémentation rapide.
L’approche utilisée repose sur la décomposition de la matrice de cooccurrence sur une base
orthonormale séparable. Les coefficients issus de cette décomposition sont alors utilisés
comme attributs de texture d’un classifieur supervisé, dont une optimisation est donnée dans
le cas de la discrimination de deux textures. Cette méthode a permis de réduire de façon
considérable les temps de calcul relativement longs dans le cas de l’analyse de texture tout en
gardant un pouvoir de discrimination satisfaisant.
Le domaine médical n’a pas les mêmes attentes que le milieu industriel, vis-à-vis des
recherches en traitement du signal et des images. En ce début de 21ème siècle, la médecine
connaît une mutation profonde. Il y a cinquante ans 80% du diagnostic médical était obtenu
par l’oreille et la palpation, alors qu’aujourd’hui il se fait par l’œil. Le traitement d’image
appliqué à la médecine est donc devenu un axe de recherche fort, surtout si l’on considère que
dans le domaine médical, l’accent est de plus en plus mis sur la détection précoce, notamment
pour les pathologies à risque telles que le cancer, les maladies de la rétine,….
La radiographie, l’écographie, l’Imagerie par Résonance Magnétique (IRM), la Tomographie
par Emission de Positons (TEP), sont autant de techniques pour l’exploration du corps
humain. Les données véhiculées par ces modalités d’imagerie sont de plus en plus
volumineuses et complexes à interpréter. L’outil informatique et le traitement numérique de
l’information deviennent un moyen indispensable pour aider à :
♦ Acquérir, reconstruire, quantifier, superposer, interpréter dans le cas d’une aide au
diagnostic assisté par ordinateur ;
♦ Planifier, simuler et contrôler dans le cas d’une aide à la thérapie assistée par ordinateur.

25
Notre seconde contribution se situe dans le cadre de l’aide au diagnostic assisté par
ordinateur.
Les images médicales sont par nature entachées de bruit, essentiellement dû à la complexité
de l’interaction entre une onde (électromagnétique, sonore,…) responsable de leur formation
avec la matière (tissus humains). Nous nous sommes intéressés plus spécifiquement au
débruitage des images radiographiques, et en particulier les mammographies, pour lesquelles
le bruit peut être vu comme additif et dépendant du signal.
L’approche a consisté à développer une méthode basée sur la transformation de l’espace des
niveaux de gris de l’image initiale à un espace de contraste, puis après une modification de
contraste, sur la transformation inverse de cet espace vers l’espace de niveaux de gris, où
l’image obtenue est une version débruitée de l’image initiale. Cette approche adoptée par
ailleurs dans le cas du filtrage fréquentiel, a permis de tester certaines familles de fonctions de
modification du contraste puis de rechercher la fonction de modification de contraste
optimale, débruitant au mieux, au sens des moindres carrés.
En collaboration avec l’Association ARCADES (Association pour la Recherche et le
dépistage des CAncers Du Sein et du col de l’utérus), nous nous sommes intéressés par la
suite à la mise en pratique de la technique développée au problème du contrôle de qualité des
installations mammographiques. Dans cette optique des images radiographiques ont été
numérisées, puis un schéma de traitement des images obtenues a été proposé dans le cadre de
l’étude de faisabilité de l’évaluation des installations de production mammographique.
A la suite de ce travail de prétraitement, nous avons entamé naturellement une étude plus
spécifique sur la segmentation explorant les possibilités de transfert des techniques
statistiques du signal aux cas des images médicales. Ceci nous a conduit à développer des
méthodes statistiques de segmentation basées sur la théorie de la détection d’une part et
d’intégrer d’autre part, les concepts Bayesiens associés aux modèles de Markov. La
segmentation des régions d’intérêt d’une mammographie (en collaboration avec l’association
ARCADES), ainsi que ceux de la zone avasculaire centrale et de l’arbre vasculaire sur des
angiographies rétiniennes (en collaboration avec le service d’Ophtalmologie de l’Hôpital de la
Timone, Marseille), ont fait l’objet d’une étude plus spécifique.
D’autres travaux non mentionnés dans ce manuscrit ont porté sur la modélisation de signaux
biomédicaux (signaux ECG) et la détection de contours par des méthodes de traitement
d’antenne.

26
Les thématiques développées dans cette synthèse concernent essentiellement deux phases de
la chaîne de traitement de tout système utilisant l’analyse d’images, à savoir : traitement de
bas-niveau (prétraitement) et celui de niveau intermédiaire (segmentation).
Ce manuscrit est organisé en trois parties. Nous avons choisi de consacrer un chapitre à
chaque thématique.
♦ Le premier chapitre concerne la description de la méthode d’analyse de texture par
décomposition orthogonale de la matrice de cooccurrence. La classification optimisée dans le
cas de deux textures est ainsi exposée.
♦ La seconde partie introduit les développements liés à la réduction de bruit via l’utilisation
de fonctions de modification d’un contraste local. La validation sur des images artificielles
ainsi que les résultats obtenus dans le cas de l’étude de faisabilité du contrôle qualité des
installations mammographiques sont présentés.
♦ Le troisième chapitre traite de la segmentation statistique des images. Dans cette partie, les
concepts de statistique de signal et de segmentation Bayesienne sont brièvement exposés puis
deux applications liées aux mammographies et aux angiographies sont présentées.
Une conclusion sur les travaux menés puis une présentation du projet de recherche envisagé
cloront ce manuscrit.
Cette introduction ne saurait être complète sans un mot sur le parcours qu’a été le mien tout
au long de ces quatorze dernières années.
J’ai été nommé Maître de Conférences à l’IUT de Marseille au département délocalisé de
Salon-de-Provence en Septembre 1994. Durant deux années, il ne m’a pas été possible
d’avancer normalement dans mes travaux de recherche compte tenu de la charge
d’enseignement qui m’a été confiée. En effet le département venait d’ouvrir ses portes et la
première promotion sortait en Juin 1995. La responsabilité de tout l’enseignement théorique et
pratique d’Automatique et d’Automates Programmables Industriels m’incombait.
Une des thématiques n’a vraiment démarré qu’en 1996, où j’ai rejoint l’Institut Fresnel UMR
6133 pendant une année dans l’équipe dirigée par le Professeur Philippe REFREGIER. En
1997 je suis accueilli au laboratoire Interface Physique Biologie Médecine (IPBM), EA 883,
dirigé par le Professeur Georges RASIGNI, pour me consacrer plus à des problématiques liées
à l’imagerie médicale. A la suite de la collaboration dans l’encadrement d’une thèse, je rejoins
de nouveau l’Institut Fresnel en 2004 dans l’équipe Groupe Signaux Multidimensionnels
(GSM) dirigé par le Professeur Salah BOURENNANE. Pour me rapprocher des thématiques
de mon nouveau laboratoire, j’ai demandé et bénéficié d’un Congé pour Recherche et

27
Conversion Thématique de 6 mois (Février 2006-Juillet 2006) au titre de l’Etablissement
(Université Paul Cézanne, Aix-Marseille III) où j’ai continué mes travaux.

28
Chapitre 1
Analyse de texture pour l’inspection de surface
1.1 Introduction
Cette thématique concerne en partie les travaux menés au sein du CRAN (Centre de
Recherche en Automatique de Nancy), UMR 7039, et qui ont conduit à l'obtention du
Doctorat de l'Institut National Polytechnique de Lorraine en Janvier 1994. La thèse [1]
soutenue le 27 Janvier 1994, et intitulée ″ Détection de défauts dans le placage d’okoumé
par traitement d’image couleur et analyse de texture ″ porte essentiellement sur
l’automatisation du contrôle de l’aspect de surface dans l’industrie du bois par traitement
d’image sur du placage d’okoumé.
Dans ce cadre quatre volets ont été abordés :
♦Traitement d'images couleur. Il s’agissait d’étudier la pertinence de l’apport de la
composante chromatique dans la détection puis la caractérisation des défauts du bois. A cet
effet un modèle de représentation de l’information couleur a été mis en place puis une
méthode de segmentation basée sur cette information a été élaborée. Une étude comparative
sur les différents espaces colorimétriques (RVB, I1I2I3, HSI, L*a*b*, L*u*v*) a permis de
montrer expérimentalement [2] en utilisant un apprentissage supervisé et un critère statistique
qu’il existait un espace de couleur plus pertinent pour l’étude de la surface de ce matériau, et
que l’on pouvait se contenter d’utiliser deux composantes sur trois sans perdre l’essentiel de
l’information. Une fois le repère colorimétrique de travail établi, un classifieur bas –niveau
couleur a été mis en place sur la base d’un apprentissage supervisé des classes de défauts, en
utilisant l’histogramme bidimensionnel des composantes de couleur retenues.
♦L’analyse de texture dans le but de détecter des zones défectueuses dues à des
irrégularités locales des fibres de bois. Ce sont des défauts d’aspect autres que les singularités
classiques (nœuds, fentes, etc …). Ces altérations de structure du fil du bois, regroupées sous
l’appellation défauts de texture, sont très peu contrastées par rapport à des zones de bois sain.
Elles présentent en outre des contours très difficiles à localiser et nécessitent un éclairage
rasant pour mieux les mettre en évidence. Pour segmenter ces zones défectueuses, nous avons
évalué ″le pouvoir de détection et de discrimination″ de cinq méthodes d’analyse de texture.
La comparaison a été établie en fixant pour chaque méthode N attributs et en recherchant le

29
sous ensemble K d’attributs qui discriminent au mieux les défauts de texture. L’efficacité de
chaque sous-ensemble reposait sur une double optimisation : maximisation de la variance [3]
inter-classes et minimisation de la variance intra-classes. Les travaux effectués ont permis de
retenir les masques de convolution de Laws. Cette méthode basée sur l'extraction locale d’une
énergie de texture, présentait le meilleur compromis "efficacité de détection / temps de
calcul".
♦Le troisième volet de mes travaux a consisté à étudier la faisabilité [4] de la découpe
automatisée et optimisée du placage d’okoumé. Cette phase est la dernière phase du
procédé de fabrication de contreplaqué et intervient après les phases de détection et de
caractérisation des défauts décrites précédemment.
♦Enfin le dernier volet [3] concernait la prise en compte des aspects industriels d’un
prototype de machine d’inspection automatique de surface de placage d’okoumé. Les
conditions d’éclairage, l’architecture matérielle autour de DSP (Digital Signal Processor) ainsi
que l’implantation des méthodes de segmentation couleur et texture en temps réel ont été
abordées.
Le travail présenté dans ce chapitre a été effectué en partie dans le cadre du DEA de S.
Allam, que j’ai encadré en collaboration avec le Professeur Philippe REFREGIER.
Les méthodes d’analyse de texture [5-12], abordées déjà dans le cadre de ma thèse ont montré
qu’elles étaient assez gourmandes en temps de calcul et qu’une implémentation en temps réel
était assez délicate. La matrice de cooccurrence est une des méthodes statistiques de référence
en analyse de texture. Elle repose sur l’emploi de la probabilité d’apparition conjointe d’un
couple de pixels dans une configuration donnée. La robustesse de cette méthode réside dans le
fait qu’elle utilise aussi bien une information spatiale (position relative des pixels) que tonale,
(niveau de gris) mettant ainsi en œuvre des statistiques d’ordre deux. Dans ce cadre, nous
avons développé une méthode rapide de discrimination de texture basée sur la décomposition
orthogonale de matrices de cooccurrences sur une base orthogonale.
Pour illustrer cette décomposition, rappelons dans un premier temps ce qu’est la matrice de
cooccurrence puis nous aborderons la décomposition mise en œuvre ainsi que son utilisation
dans le cadre de la discrimination optimale de deux textures.

30
1.2 Décomposition de la matrice de cooccurrence
Soit I : Lx×Ly → G, une image donnée où Lx et Ly désignent respectivement le nombre de
lignes et de colonnes et où G représente l’ensemble des niveaux de gris susceptibles d’être
pris par tout pixel de I, à savoir G = [0, 1, 2,…..Ng-1].
Définissons alors la matrice de cooccurrence Pt=[p(i,j|t)] comme suit :
( ) ( )j)yy,xx(Ii)y,x(IN
1)tj,i(p
S)y,x(t
−∆+∆+δ−δ= ∑∈
(1.1)
avec
♦ yxyx LL)yy,xx(LL)y,x(S ×∈∆+∆+×∈=
♦ δ représente le symbole de Kronecker
♦ Nt =card(S)
♦ t le vecteur de translation , t = (∆x, ∆y)
I(x,y) le niveau de gris de l’image I au pixel (i,j)
p(i,j|t) représente la probabilité d’apparition d’un couple de pixels situés respectivement en
(x,y) et (x+∆x, x+∆y) (ces deux pixels sont donc séparés par le vecteur de translation t) en
ayant respectivement les niveaux de gris i et j.
Pour éviter de faire la distinction entre deux directions opposées, on peut utiliser une matrice
de cooccurrence symétrique définie de la manière suivante :
[ ][ ])ti,j(p)tj,i(p
2
1)tj,i(m
PP2
1M T
ttt
+=
+= (1.2)
où TtP représente la matrice transposée de tP
Le calcul d’une telle matrice a une complexité en O(Lx×Ly). Si l’on s’intéresse au processus
d’extraction d’attributs de texture issus de cette matrice, le calcul d’un attribut de texture lié à
un voisinage autour d’un pixel donné, pour l’ensemble de l’image I atteint une complexité en
O(Ng2× Lx×Ly).

31
Lorsque l’on observe une telle matrice de taille Ng2, on s’aperçoit que l’information texture
n’occupe qu’une toute petite partie de la surface, la majeure partie de cette matrice est
constituée de zéro. On peut alors légitimement se poser la question de l’extraction de
l’information en un temps raisonnable permettant d’obtenir le meilleur compromis ’’quantité
d’informations/temps de calcul ’’.
La solution qui a été adoptée [13] est de décomposer la matrice de cooccurrence dans une
base orthonormale séparable ( fn.fmT) puis de choisir le nombre de composantes permettant de
la définir.
∑ ∑
∑ ∑
∈ ∈
∈ ∈
=
=
Gn Gmmnn,m
Gn Gm
Tmnn,mt
)j(f)i(f)t(c)tj,i(m
ff)t(cM
(1.3)
où [ ])1N(f),.....,1(f),0(ff gnnnTn −=
Compte tenu de l’orthogonalité de la base, les coefficients cm,n s’obtiennent par la relation :
Tmtn
Gn Gmmnn,m fMf)j(f)i(f)tj,i(m)t(c == ∑ ∑
∈ ∈ (1.4)
En substituant l’expression de m(i,j|t) donnée par (1.2) dans l’équation précédente, on obtient
alors :
[ ])t()t(2
1)t(c m,nn,mn,m ρ+ρ= (1.5)
avec
))y,x(I(f)y,x(vet)yy,xx(v)y,x(vN
1)t( nnm
S)y,x(n
tn,m =∆+∆+=ρ ∑
∈
Tout élément de la matrice de cooccurrence peut alors être estimé par une somme tronquée
dont le nombre d’éléments N dépend du degré de précision voulu :
∑ ∑= =
≈N
0n
N
0mmnn,m )j(f)i(f)t(c)tj,i(m (1.6)

32
A titre de comparaison, nous avons calculé une matrice de cooccurrence sur une image puis
nous avons décomposé celle-ci en utilisant les bases orthogonales constituées par les
polynômes de Legendre, Jacobi, Laguerre ainsi que sur la base exponentielle complexe et la
base propre de la matrice de cooccurrence.
Les résultats de reconstruction obtenus ont permis de confirmer que la bonne estimation de
cette matrice était liée au nombre de composantes utilisées, mais encore et surtout qu’à partir
de peu de composantes la base propre de la matrice de cooccurrence était la mieux adaptée.
1.3 Discrimination de textures par décomposition
orthogonale
1.3.1 Choix de l’attribut optimum
En règle générale, les méthodes d’analyse de texture procèdent en deux étapes : mise en place
de la méthode à proprement parlé sur une image (statistiques du premier ordre :
histogrammes, statistiques du second ordre :matrices de cooccurrence, matrices de longueurs
de plages, Spectre de Fourier, ondelettes,…) puis extraction d’un vecteur d’attributs pour
chaque pixel de l’image en vue d’une classification.
Quelle que soit la pertinence de l’attribut choisi, il ne prend en compte qu’une partie de
l’information contenue dans la matrice de cooccurrence, et ne peut pas être toujours considéré
comme optimum. Les coefficients de la décomposition de la matrice de cooccurrence sur une
base orthonormale fournissent alors une nouvelle famille d’attributs directement liés à la
texture étudiée. L’avantage d’un tel ensemble d’attributs est double :
♦ Il dépend directement de la matrice de cooccurrence alors que classiquement, il est déduit à
partir de cette matrice.
♦ Il n’est pas indispensable de calculer la matrice de cooccurrence pour y accéder, à chaque
fois qu’une image de texture doit être classée. La formule donnée en (1.5), comme nous le
verrons dans le paragraphe suivant, calcule les attributs connaissant la base de décomposition
uniquement. Cette base est élaborée une seule fois lors de la phase d’apprentissage.
La discrimination de deux textures en utilisant les coefficients de la décomposition de leurs
matrices de cooccurrence respectives, peut être effectuée en choisissant la base, mais aussi le

33
nombre de composantes assurant le meilleur compromis ’’pouvoir de discrimination/temps de
calcul’’.
Considérons à cet effet que l’on dispose de deux textures dont les matrices de cooccurrence
sont respectivement Mt(1) et Mt
(2) , et déterminons alors la base dans laquelle les coefficients
de décompositions )t(c )1(n,m et )t(c )2(
n,m respectifs sont les plus différents possible, ou ce qui
revient à dire maximiser l’expression :
)t(c)t(c)t(c )2(n,m
)1(n,mn,m −=∆ (1.7)
Nous avons établi [13] que le maximum de l’expression (1.7) est obtenu par projection de la
matrice Mt= Mt(1)-Mt
(2) sur T11ff où 1f désigne le vecteur propre associé à la plus grande valeur
propre en valeur absolue de Mt .
L’attribut optimal pour la discrimination de deux textures est, compte tenu de la relation
(1.5) :
))y,x(I(f)y,x(v)yy,xx(v)y,x(vN
1)t()t(c 111
S)y,x(1
t1,11,1 =∆+∆+=ρ= ∑
∈et (1.8)
1.3.2 Implémentation du classifieur
Une analyse détaillée de l’expression (1.8) donnant l’attribut optimal dans le cadre de la
discrimination de deux textures, permet de constater qu’il s’agit essentiellement du calcul de
l’autocorrélation de v1(x,y), image obtenue grâce à l’application de la LUT (Look Up Table)
définie par [ ] Tg1111 )1N(f),.....,1(f),0(ff −= à l’image I. L’implantation d’un tel classifieur
nécessite la connaissance du vecteur f1, vecteur obtenu en explicitant la plus grande valeur
propre (en valeur absolue) de la matrice Mt. Ceci est possible dans le cadre d’un
apprentissage supervisé comportant une phase d’apprentissage et une phase de généralisation.
La phase d’apprentissage consiste à :
♦ Calculer les matrices de cooccurrence Mt (1) et Mt
(2) des deux textures T1 et T2 que l’on
désire ’’apprendre’’.
♦ Trouver les valeurs propres et vecteurs propres de la matrice Mt= Mt(1)-Mt
(2) et sélectionner
le vecteur propre associé à la plus grande valeur propre.

34
♦ Extraire l’attribut de texture c1,1(t) pour chacune des deux images T1 et T2, en les balayant
avec un voisinage défini autour de chaque pixel.
♦ Sélectionner un seuil optimum Sopt de manière à minimiser le taux d’erreur de classification
sur le couple de texture (T1, T2) défini par
t
21
N
NN +=τ (1.9)
où N1 (N2) représente le nombre de pixels de la texture T1 (T2) mal classés et Nt le nombre
total de points à classer.
La phase de généralisation consiste, pour deux textures inconnues à discriminer, à calculer sur
le même voisinage que celui qui a servi dans la phase d’apprentissage, l’attribut donné par la
relation (1.8). Un schéma d’implémentation optimisée en vue d’un traitement en temps réel
est illustré en figure 1.1.
Fig. 1.1 : Schéma d’implémentation optimisée du classifieur de texture
L’algorithme décrit ci-dessus possède une complexité en O(3×Lx×Ly) conformément aux
notations du paragraphe portant sur la décomposition de la matrice de cooccurrence. Un gain
Application LUT
Multiplication par la translatée
Moyenne glissante
Seuillage
Image de départ
Image seuillée
v1(x,y)
v1(x,y)v1(x+∆x,y+∆y)
c1,1(t)

35
de complexité considérable est réalisé compte tenu de l’invariance de cet algorithme par
rapport au nombre de niveaux de gris.
1.3.3 Quelques résultats
Pour évaluer la pertinence de cette approche, les tests sont réalisés sur deux types de textures :
Des textures synthétiques et des textures naturelles. Chaque image Si (synthétique) et Ni
(naturelle) se présente sous la forme de deux régions comportant chacune deux textures à
discriminer (voir figure 1.2). Pour chaque couple (Si ou Ni) sont associées deux images
notées SiL, SiR et NiL, NiR qui correspondent respectivement aux images utilisées pour
l’apprentissage et pour la généralisation.
Afin de comparer les résultats obtenus, une analyse discriminante de Fisher (ADF) a été
réalisée aussi bien sur les images d’apprentissage, pour fixer la direction de décomposition et
le seuil optimal, que sur les images de généralisation.
A cet effet, la matrice de cooccurrence est calculée, puis six attributs de texture :
homogénéité, inertie, inhomogénéité, asymétrie, proéminence et corrélation sont extraits.
Durant la phase d’apprentissage, l’algorithme recherche la direction qui sépare au mieux les
classes ainsi que le seuil minimisant l’erreur de classification. Pendant la phase de
généralisation, on projette l’ensemble des vecteurs de l’espace attribut sur la direction fixée
lors de la phase précédente puis on applique le seuil appris précédemment.
Le tableau 1.1 donne les résultats obtenus sur les images Si et Ni, i=1, 2 et 3 par la méthode
de décomposition de la matrice de cooccurrence et ceux issus de l’utilisation de la matrice de
cooccurrence combiné avec l’analyse discriminante de Fisher.

36

37
Fig. 1.2 : Images de textures utilisées pour l’évaluation de la méthode
NiL : texture naturelle apprentissage, NiR : texture naturelle généralisation
SiL : texture synthétique apprentissage, SiR : texture synthétique généralisation

38
Couple
de texture
Méthode utilisée
Masque
Vecteur de
translation
Taux d’erreur
d’apprentissage (%)
Taux d’erreur de
généralisation (%)
Textures Synthétiques
S1 MC+ADF
DBVP
15×15 (1,0) 0.68
0.81
0.96
0.88
S2 MC+ADF
DBVP
15×15 (5,0) 1.44
1.29
1.57
1.52
S3 MC+ADF
DBVP
15×15 (1,0) 9.6
1.6
20
1.4
Textures Naturelles
N1 MC+ADF
DBVP
15×15 (5,0)
11
0.3
25.7
1.3
N2 MC+ADF
DBVP
15×15 (5,0)
8
0.17
36.8
0.6
N3 MC+ADF
DBVP
15×15 (5,0)
14.4
0.93
14
1.82
Tab. 1.1: Résultats de comparaison entre la décomposition selon l’analyse discriminante de Fischer et la
méthode proposée. MC+ADF : Matrice de cooccurrences + Analyse Discriminante de Fisher; DBVP :
Décomposition sur la Base du Vecteur Propre.
Les résultats obtenus montrent que la méthode proposée donne des taux d’erreurs assez
faibles dans le cas de textures synthétiques et plus élevés dans le cas des textures naturelles.
Ces taux d’erreurs restent cependant très faibles, ne dépassant pas 2% (quelques 1300 pixels
mal classés sur 65536=256×256). Comme on aurait pu le prévoir, les taux d’erreurs
d’apprentissage sont inférieurs aux taux de généralisation dans la majorité des tests effectués.
Une constatation s’impose : la méthode développée reste supérieure en terme de ’’pouvoir de
discrimination’’ comparée à l’utilisation de la matrice de cooccurrence associée à l’analyse
discriminante de Fisher. La figure 1.3 donne un exemple d’application du classifieur sur une
image de texture synthétique S3.

39
Fig. 1.3 : Résultats de la classification en utilisant une texture synthétique
(a): Image S3 ; (b) : image transformée par application de la LUT ; (c) : image résultat du produit de l’image
(b) avec sa translatée ; (d) : application du filtre moyen 15×15 sur l’image (c) ; (e) : image seuillée en utilisant
le seuil optimum.

40
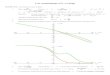
Pour mieux illustrer le comportement des deux méthodes lors de la phase d’apprentissage,
nous avons représenté le taux d’erreur d’apprentissage en fonction du seuil pour l’image
N2(voir figure 1.4). Il apparaît alors sur la courbe de notre classifieur une large bande pour
laquelle l’erreur reste minimale alors que cette bande est très étroite dans le cas du classifieur
par analyse discriminante de Fischer. Cette stabilité apparente permet de lier les performances
de ces classifieurs à une notion de robustesse aux changements de seuil optimal. Un
déplacement léger du niveau du seuil pourrait perturber considérablement le classifieur basé
sur l’approche de Fisher dans sa phase de généralisation, alors que celui issu de l’approche
décrite dans ce travail, serait moins sensible à ces changements.
Fig. 1.4 : Taux d’erreur d’apprentissage en fonction du seuil
Les performances en terme de temps de calcul des deux classifieurs ont aussi été évaluées sur
une image 256×256 quantifiée sur 16, 64 puis 128 niveaux de gris. Ils sont résumés dans le
tableau 1.2 et permettent de confirmer la rapidité de la démarche adoptée.
Valeur du seuil
Taux d’erreurs d’apprentissage
DBVP
ADF

41
Niveaux de gris Méthode utilisée
DBVP MC+ADF
16 1 s 71 s
64 1 s 633 s
128 1 s 2137 s
Masque 15×15, vecteur t=(5,0)
Machine Sun Sparc 20
Tab. 1.2 Temps de calcul pour l’extraction d’attributs de texture. MC+ADF : Matrice de cooccurrences +
Analyse Discriminante de Fisher; DBVP : Décomposition sur la Base du vecteur propre associé à la plus grande
valeur propre.
1.4 Conclusion
L’utilisation de la décomposition de la matrice de cooccurrence sur une base orthonormale
séparable a permis de définir de nouveaux attributs de texture pertinents. Le cas de la
classification de deux textures a été étudié et une optimisation de ce problème a été donnée.
L’étude d’une implémentation en temps réel de la méthodologie en utilisant des corrélations a
été développée. Cette méthode a permis de diviser de façon considérable les temps de calcul
relativement longs dans le cas de l’analyse de texture tout en gardant un pouvoir de
discrimination satisfaisant. Une généralisation de cette méthode au cas de plusieurs textures
peut être envisagée et une application en synthèse de texture en vue d’une ’’compression de
texture’’ par exemple sont autant de prolongements intéressants pour cette technique. Le
principal atout de cette approche est sa rapidité et une intégration en inspection de surface est
envisageable à double titre : les cadences mises en jeu sont compatibles avec les temps de
calculs obtenus et l’approche par apprentissage supervisé semble être une bonne approche en
vue d’une automatisation.

42
Bibliographie
1. M. ADEL, ″ Détection de défauts dans le placage d’okoumé par traitement d’image
couleur et analyse de texture ″ Thèse de doctorat de l’Institut National Polytechnique de
Loraine soutenue le 27 janvier 1994.
2. M. ADEL, D. WOLF, R. VOGRIG, R. HUSSON, ″ Evaluation of Colour Spaces in
Computer Vision. Application of Wood Defects Detection ″ . IEEE International
Conference on Systems, Man and Cybernetics, Le Touquet, FRANCE, 2, 499-504,
(1993).
3. M. ADEL, D. WOLF, R. VOGRIG : ″ Inspection de Surface Industrielle en Ligne :
Application à la Détection de Défauts dans le Bois ″. Revue de Génie des Procédés,
Capteurs en Elaboration de Matériaux, Limoge, Vol 8, 1994.
4. R.VOGRIG, B. KARPP, J. F. PORTALA, M. ADEL, R. LEFEVRE, ″ Scanning for
Optimized Lumber Ripping and Cross-Cutting ″. 5th International Conference on
Scanning Technology & Process Control for the Wood Products Industry, Atlanta,
USA, October 1993.
5. R. M. HARRALICK, K. SHANMUGAM AND I. DINSTEIN, ″ Textural features for
image classification ″ IEEE Trans. Syst. Man Cybernetics, 610-621, (1973).
6. M. M. GALLOWAY, ″ Texture analysis using gray level run lengths ″, Comput. Vision
Graphics Image Processing, 4, 172-179, (1975).
7. J. S. WESZKA, C. A. DYER AND A. ROSENFELD, ″ A comparative study of texture for
terrain classification ″ , IEEE Trans. Syst. Man Cybernetics, 6, 269-285, (1976).
8. R. M. HARRALICK ″ Statistical and structural approach to texture ″, Proc. IEEE, 67,
786-804, (1979).
9. K. L. LAWS, ″ Texture energy measure″ , Proceedings on Image Understanding
workshop, 47-51, (1979).
10. F. D’ASTOUS AND M. E. JERNIGAN, ″ Texture discrimination based on detailed
measures of the power spectral ″, Proceedings of the Seventh International Conference
on Pattern Recognition, 83-86, (1984).
11. C. C. GOTLIEB AND H. E. KREYSZIG, ″ Texture descriptors based on cooccurrence
matrices″ Comput. Vision Graphics Image Processing, 51, 70-86, (1990).

43
12. Z. Q. LIU AND S. V. R. MADIRAJU, ″ Covariance based approach to texture
processing ″, Applied Optics, 35, 848-853, (1996).
13. S. ALLAM, M. ADEL, P. RÉFRÉGIER : ″ Fast Algorithm for texture discrimination by
use of a separable orthonormal decomposition of the co-occurrence matrix ″. Applied
Optics, Information Processing, 36(32), 8313-8321, (1997).

44
Chapitre 2
Réduction de bruit dans les images par utilisation de fonctions de modification du contraste local
2.1 Introduction
L’activité de recherche de ces dernières années a été consacrée au traitement d’images
numériques, au traitement du signal et à la reconnaissance de formes dans le cadre de l’aide
au diagnostic médical assistée par ordinateur. Il m’a été confié la responsabilité -avec le
Professeur Monique Rasigni - de la mise en place d’une équipe dont la thématique est le
développement de techniques d’imagerie numérique pour le débruitage et la segmentation
d’images médicales.
Ces images sont issues de plusieurs modalités (rayons X, IRM, échographie, TEP,..). Elles
sont très souvent peu contrastées et fortement bruitées. Le bruit entachant ces images est
essentiellement dû au processus physique qui leur a donné naissance. Nous nous sommes
intéressés au cas de l’interaction photons X- matière et à l’obtention du cliché radiographique.
Dans ce qui suit, le bruit dépendant du signal, caractéristique des images rayons X est
introduit, puis les méthodes développées permettant de le réduire sont décrites. Enfin,
l’intégration de ces techniques de débruitage dans le cas de l’étude de faisabilité du contrôle
de qualité des installations mammographiques est présentée.
Le travail présenté dans ce deuxième chapitre a été effectué en grande partie dans le
cadre de la thèse de V. GUIS et des stages de DEA de A. C. CARILERRO , V. GUIS et
D. ZUWALA. Ces travaux ont été co-encadrés avec le Professeur Monique Rasigni.
2.2 Nature du bruit radiographique
Le bruit présent dans un cliché radiographique est essentiellement introduit par l’appareillage.
Deux causes principales en sont responsables :
♦ Le bruit quantique lié aux fluctuations de l’éclairement (quantum mottle dans la littérature
anglo-saxonne). L’éclairement est proportionnel au nombre de photons émis par la source X.
Ce nombre de photons suit une loi de Poisson. Au niveau du cliché, ces variations provoquent
une fluctuation du nombre de photons absorbés par unité d’aire.

45
♦ Le bruit de granularité lié aux fluctuations du nombre de grains de l’émulsion du film
photographique (film grain noise dans la littérature anglo-saxonne). Le nombre de grains
impressionnés suit aussi une loi de Poisson.
A noter que ces bruits sont d’origine statistique. D’autres sources de bruits contribuent aussi à
la dégradation du film comme les systèmes de développement et les grilles anti-diffusantes.
La numérisation des films radiographiques introduit elle aussi d’autres types de bruits : le
bruit (du ou des) photomultiplicateur(s), le bruit dû à l’électronique de mesure et le bruit de
quantification qui reste prépondérant comparé aux deux premiers. Il demeure tout de même,
compte tenu du pas de quantification utilisé pour la numérisation, relativement faible par
rapport au bruit quantique et au bruit de granularité.
Le modèle le plus répandu est celui où le bruit global introduit par le processus
d’enregistrement et de reproduction photographique est un bruit additif. Ce modèle n’est
valable que dans la partie linéaire du film radiographique, c’est-à-dire dans le cas où la
densité optique est proportionnelle au logarithme de l’exposition. De plus, comme décrit
précédemment, le bruit contenu dans ces images est de nature dépendant du signal, corrélé
spatialement et de type Poisson [1-4]. Il est très difficile dans le cas de ce type de bruit, de
séparer le signal du bruit. Une approximation d’ordre 1 permet de décrire ce type de bruit par
en un bruit Gaussien dépendant du signal mais spatialement non corrélé [5-6] et dont
l’expression pour chaque pixel (i,j) est donnée par :
)j,i(u)j,i(f)j,i(b p= (2.1)
où l’image f représente l’image ’’idéale’’ non dégradée, p est un réel positif inférieur à 1 et u
est un bruit Gaussien centré d’écart-type σu. En général, p varie entre 0.3 et 0.7 suivant les
caractéristiques du film et les conditions de développement. L’image dégradée à laquelle on a
accès, notée g, s’écrit :
)j,i(b)j,i(f)j,i(g += (2.2)
La vérification du modèle a été établie sur une dizaine de mammographies [7] et a confirmé la
valeur de p utilisée généralement dans la littérature [3], à savoir p=0.5.

46
2.3 Débruitage par utilisation de fonctions de
modification du contraste
Le rehaussement d’image fait partie des traitements ’’bas-niveau’’ permettant de préparer une
image à l’étape de segmentation. Il consiste généralement soit à rehausser le contraste
objet/fond, soit à réduire le bruit du fond de manière à mieux faire ressortir l’objet contenu
dans l’image.
Les techniques de rehaussement d’image classiques peuvent être divisées en deux catégories :
Les méthodes directes et les méthodes indirectes. Les méthodes directes sont construites sur la
base du calcul d’un contraste local auquel on associe une fonction de rehaussement de
contraste. Les méthodes indirectes rehaussent l’image sans avoir à calculer de contraste.
Les méthodes indirectes [8], plus largement utilisées, sont résumées, de manière non
exhaustive dans la figure 2.1.
Fig 2.1 : Panaroma des méthodes de rehaussement d’image [8]
On distingue trois grandes familles de méthodes :
♦ Les méthodes ponctuelles qui transforment les niveaux de gris de l’image initiale par
application d’une table de transformation LUT (Look up Table).
• Egalisation d’histogramme • Modification d’histogramme • Modélisation d’histogramme • Expansion de la dynamique
• Lissage linéaire de bruit • Filtres médians • Filtrage passe-bas, passe-haut et passe-bande • Filtrage dérivatif
• Filtrage linéaire généralisé • Filtrage homomorphique • Filtrage fréquentiel
Opérations ponctuelles
Opérations spatiales
Opérations de transformation

47
♦ Les méthodes spatiales regroupant le filtrage spatial de l’image par des noyaux de
convolution de filtres généralement à réponse impulsionnelle finie.
♦ Les méthodes de transformation transposent le problème dans un autre espace (fréquentiel
ou autre) puis fournissent une image rehaussée par l’utilisation d’une transformation inverse
permettant de revenir à l’espace de niveaux de gris de l’image initiale.
Nos travaux de recherche s’inscrivent dans le cadre des techniques de rehaussement d’image
par méthode directe. A cet effet la thèse de Vincente Guis [9] a porté sur le développement
d’une méthode de rehaussement d’image locale basée sur le schéma de la figure 2.2.
Fig. 2.2 : Schéma fonctionnel de la méthode de rehaussement d’image
Le calcul du contraste local repose sur la notion de voisinage adaptatif. Les méthodes
spatiales de traitement d’image utilisent généralement un voisinage dont la forme et la taille
sont fixes. Très souvent carrée, la fenêtre glissante que constitue le voisinage, n’est pas
toujours bien adaptée à la forme des objets contenus dans l’image. Il nous a semblé plus
pertinent d’adapter le voisinage en taille et forme à l’environnement du pixel considéré.
Calcul du contraste local
Modification du contraste
local
Calcul du contraste inverse
Image initiale I
Image de contraste C Image du contraste
modifié C’ Image rehaussée E

48
2.3.1 Choix du voisinage adaptatif
Soit I(i,j) le niveau de gris du pixel courant (i,j) de l’image initiale I de taille Nx×Ny. Autour
de chaque pixel de I, on définit une fenêtre carré Wmax dont la taille (2Nmax+1)*(2Nmax+1)
dépend de l'objet contenu dans l'image initiale.
On étiquette alors l’image I de la manière suivante :
Pixel(k,m) labélisé à "1" si |I(k,m) –I(i,j)| < T
Pixel(k,m) labélisé à "0" si |I(k,m) –I(i,j)| ≥ T
où T est le seuil de labélisation, (i,j) coordonnées du pixel sur lequel est centrée la fenêtre
glissante et (k,m) tout pixel appartenant à Wmax.
L’écart-type total de l’image permet par exemple de définir un seuil T. De ce fait on divise
l'ensemble des pixels de l'image du masque en deux catégories : les pixels appartenant à
l'objet labélisés à "1" si |I(k,m) –I(i,j)| < T et ceux appartenant au fond labélisés à "0" si
|I(k,m) –I(i,j)| ≥ T (voir figure 2.3).
Fig. 2.3 : Sélection du voisinage adaptatif en utilisant un seuil T=5
(a) : fenêtre Wmax de taille 9×9 extraite autour du pixel central, Nmax=4 ; (b) Etiquetage des pixels; (c) fenêtre W0 retenue pour la définition des régions centre et fond (le pourcentage de points étiquetés "0" dans les fenêtres
concentriques est respectivement P0=12.5%, 50%, 58.3% et 68.7% pour c=1, 3, 5 et 7. (d) pixels de la
région fond, pixels de la région objet (centre) et pixels non utilisés
En utilisant cet attribut de l'image comme critère, on s'affranchit du caractère aléatoire du
seuil. Etant lié aux caractéristiques de l'image, ce seuil doit assurer un bon compromis. Au
sein de la fenêtre Wmax, le choix de la taille du voisinage nécessaire au calcul du contraste
local est géré par un critère d'arrêt de croissance selon le principe suivant : le pourcentage de
1 1 1 1 10 13 10 15
14 13 9 10 10 8 11
8 9 13
1 1 1 1 9 10 14 15 16 15 4
1 1 1 1 15 11 15 14
20 13 14 19 15 16 10
16 17 7
1 1 1 1 21 13 21 22
6 7 15 20 16 15 10
16 15 10
1 1 1 1 5 8 14 15
15 12 14 14 14 9 15
17 16 10
13
13
5
8
6
16
9
7
7
10
8
6
9
8
8
8
8
8
1 1 1 1 0 1 0 1
1 1 0 0 0 0 0
0 0 1
1 1 1 1 0 0 1 1 0 1 0
1 1 1 1 1 0 1 1
0 1 1 0 1 1 0
0 1 0
1 1 1 1 0 1 0 0
0 0 1 0 1 1 0
1 1 0
1 1 1 1 0 0 1 1
1 1 1 1 1 0 1
1 1 0
1
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
(a) (c) (b)
0 0 1 0 0 1
1 1 1 1 1 1
0 1 0 1 1 0
0 1 0
1 1 1 0 0 0
0 1 0 1 1 0
1 1 0
1 1 1 0 1 1
1 1 1 1 0 1
1 1 0
1
0
0
1
0
0
0
(d)
(2.3)

49
pixels étiquetés "0" est calculé sur les régions de section carrée concentriques centrées sur le
pixel (i,j). Ces régions sont celles comprises entre deux fenêtres de taille respectives c×c et
(c+2)×(c+2) avec c ∈ [1, 3, 5,… 2×Nmax-1]. Lorsque la proportion de "0" est supérieure à un
seuil donné, ou que l’on atteint la fenêtre Wmax, la croissance du masque s’arrête. Une fenêtre
W0 est alors associée au pixel (i,j). En dernière étape, deux régions que l’on nomme le centre
et le fond sont associées aux pixels contenus dans la fenêtre W0, respectivement aux pixels
étiquetés "1" et aux pixels étiquetés "0" qui comptent parmi leurs 8 premiers voisins au moins
un pixel du centre. Les autres pixels "0" ne sont pas pris en compte (figure 2.3). Cette étape
terminée, l'image de contraste peut être créée.
2.3.2 Calcul du contraste local
Le masque (fenêtre W0) est appliqué autour de chaque pixel (i,j) de l'image I. Il permet de
calculer à l'intérieur de la zone qu'il délimite la moyenne des valeurs en niveaux de gris des
pixels de la région-objet ou centre Mc(i,j) et la moyenne des valeurs en niveaux de gris des
pixels de la région fond Mb(i,j)
Grâce à ces moyennes, il est possible de calculer le contraste de chaque pixel (i,j) de l'image I
à l'aide de la formule suivante :
))j,i(M),j,i(M(MAX
)j,i(M)j,i(M)j,i(C
bc
bc −= (2.4)
Cette technique permet ainsi d'obtenir une nouvelle image ou image de contraste dans laquelle
à chaque pixel est associé un contraste. Cette image possède des valeurs comprises dans
l'intervalle [0,1].
2.3.3 Fonction de rehaussement
Pour effectuer le rehaussement de contraste, l'approche choisie a été de transformer cette
image de contraste C en une nouvelle image de contraste C' dans laquelle à chaque pixel est
affectée une nouvelle valeur de contraste en utilisant une fonction mathématique ψ de sorte
que C'(i,j)= ψ(C(i,j)).
La fonction ψ doit posséder les propriétés suivantes pour que l'image finale soit une image de
contraste:
ψ doit être définie sur l'intervalle [0,1]

50
ψ doit être continue pour ne pas introduire de discontinuités dans l'image. En effet des
discontinuités importantes pour certaines valeurs de contraste risqueraient de créer de
nouveaux contours.
Dans notre étude, nous nous intéressons au rehaussement de contraste et non à son
inversion. ψ (0) = 0 et ψ (1) = 1.
ψ (x) ≥ 0 car le contraste est toujours positif donc quel que soit x appartenant à l'intervalle
[0 1].
La fonction doit être strictement croissante pour éviter d'avoir pour deux contrastes
différents dans l'image initiale un même contraste dans l'image finale.
2.3.4 Transformation inverse et image finale. L'image finale E obtenue est liée à la transformation inverse de celle qui nous a permis de
créer l'image de contraste C. Soit C'(i,j) la valeur en contraste modifié du pixel situé en (i,j),
En substituant la valeur de C(i,j) par C’(i,j) et de Mc(i,j) par E(i,j) dans (2.4), les relations
définissant l’image rehaussée sont données ci dessous :
(i,j)M(i,j) si M(i,j)M
E(i,j)(i,j)M(i,j)C
(i,j)M(i,j) si ME(i,j)
(i,j)ME(i,j)(i,j)C
cbb
b'
cbb'
≥−
=
<−
= (2.5)
Après développement, l’image rehaussée est alors donnée par :
( )
( ) (i,j)M(i,j) si M(i,j)) C1(i,j)(Mi,jE
(i,j)M(i,j) si M(i,j))C1(
(i,j)Mi,jE
cbb
cbb
≥′−=
<′−
= (2.6)
2.4 Evaluation de la méthode développée
Evaluer la méthode va permettre de faire le choix des familles de fonction de modification du
contraste, de décrire la nature des images testées et de définir les indicateurs de mesure de la
qualité du débruitage.

51
2.4.1 Nature des fonctions et paramètres utilisés
Différentes familles de fonctions ont été testées : l’exponentielle, la fonction racine, les
fonctions trigonométriques et des fonctions polynomiales [10]. Le comportement des ces
fonctions dépend essentiellement de leur position par rapport à la droite y = x. En effet si pour
un contraste C donné ψ(C) ≥ C la fonction ψ contribue au rehaussement de contraste original
alors que si ψ(C) < C, la fonction participe plutôt à la réduction du contraste initial
(débruitage). De plus, le bruit correspondant à des niveaux de contraste faible, l’influence de
la pente à l’origine des fonctions ayant contribué au débruitage a été testée aussi. Parmi les
fonctions ayant donné les meilleurs résultats : les fonctions trigonométriques et polynomiales.
Dans la suite de cette partie, les résultats présentés sont relatifs aux deux fonctions données
par la figure 2.5) :
De plus pour chacune de ces fonctions, deux seuils permettant de définir le voisinage adaptatif
(voir § 2.3.1) sont utilisés:
♦ Un seuil local Tl : l'écart-type des valeurs des pixels à l'intérieur de la fenêtre Wmax
♦ Un seuil global Tg : l'écart-type des valeurs des pixels de l'image entière.
♦ La méthode associée à la fonction trigonométrique (resp. polynomiale) de modification du
contraste avec un paramètre de seuil local Tl, est notée trig_local (resp. poly_local).
♦ La méthode associée à la fonction trigonométrique (resp. polynomiale) de modification du
contraste avec un paramètre de seuil global Tg, notée trig_global (resp. poy_global).
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Contraste de départ
Con
tras
te d
'arr
ivée
Fig. 2.4 : Courbes caractéristiques des fonctions de contraste utilisées. Les croix : la fonction tangente ( )x
4tany
π=
Les carrés : la fonction polynomiale 2x2
13x84x2
255x5y ++−= . En trait discontinu: la droite d'équation y = x

52
2.4.2 Nature des images simulées
Les images simulées mises en place dans le cadre de l’évaluation de cette méthode permettent
de couvrir une large gamme d’objets de fréquences spatiales différentes. A cet effet des objets
ayant une forme ponctuelle (image_micro), circulaire (image_masse) et filiformes
(image_fibre) ont été générés. Ces images, comme nous le verrons ultérieurement, simulent
des objets analogues à ceux observés sur des images mammographiques.
Pour chacune des images simulées, nous avons fait varier le contraste global défini par (2.7)
entre l’objet et le fond.
P
PPC
b
bog
−= (2.7)
où Po est la valeur moyenne des pixels de l’objet et Pb est la valeur moyenne des pixels du
fond. Le contraste global Cg varie entre 10 et 60% avec un pas de 10%
L’image_micro, représente 6 objets ponctuels, ayant un profil demi-ellipsoïdal de section
circulaire et formant un pentagone. L’image_masse représente un disque, ayant un profil
demi-ellipsoïdal de section circulaire. Enfin l’image_fibre repésente un filament orienté à 45°
ayant aussi un profil ellipsoïdal. La figure 2.5 donne un exemple des images simulées décrites
ci-dessus.

53
0 50 100 150 200 250
100
150
200
Axe des x
Niv
eaux
de
gris
0 50 100 150 200 250
100
150
200
Axe des x
Niv
eaux
de
gris
(b)
(c)
0 50 100 150 200 250 300
100
150
200
Axe selon la longueur de la fibre
Niv
eaux
de
gris
0 50 100 150 200 250 300
100
150
200
Axe selon la largeur de la fibre
Niv
eaux
de
gris
Fig. 2.5 : Images simulées et leurs profils:(a) image_micro ; (b) image_masse ; (c) image_fibre
(a)
(c)

54
Aux images non bruitées F, décrites ci-dessus, on a rajouté un bruit dépendant du signal
caractéristique du bruit radiographique pouvant être décrit comme suit :
),(),(),( ),(),(),( jiUjiFjiBetjiBjiFjiI =+= (2.8)
où U(i,j) est un bruit Gaussien centré d’écart-type σ
Pour chaque valeur de contraste, et pour chaque famille d’objets, 4 niveaux de bruit sont
définis par le Rapport Signal sur Bruit (Signal to Noise Ratio):
=∑∑
∑∑
= =
= =N
1i
N
1j
2
N
1i
N
1j
2
10dB
)j,i(B
)j,i(F
log10SNR (2.9)
L’écart-type est choisi de sorte que le SNR prenne les valeurs 21, 15 et 9 dB représentant
respectivement ainsi un niveau faible, intermédiaire et élevé du bruit ajouté. La figure 2.6
donne un exemple des images simulées obtenues.
(a1) (a2)
(b1) (b2)
(c1) (c2)
Fig. 2.6 : Exemple d’images simulées : (a1), (b1) et (c1) images non bruitées avec respectivement 10% , 10% et
30% de contraste. (a2), (b2) et (c2) images bruitées avec un SNR de 21 dB.

55
2.4.3 Paramètres d’évaluation
Deux critères sont utilisés pour tester l'efficacité de cette méthode sur des images simulées. Le
premier paramètre ρ est le quotient du rapport signal / bruit après traitement (SNR en sortie,
noté SNRsort) sur le rapport signal / bruit avant traitement (SNR en entrée, noté SNRent). Il
quantifie la suppression du bruit et est d’autant plus élevé que l’algorithme à évaluer améliore
le Rapport Signal sur Bruit [10].
Le second critère est l'erreur quadratique moyenne MSE ("Mean Square Error" en anglais) qui
quantifie la suppression du bruit et l'information sur les distorsions de structure des objets.
Le paramètre ρ est défini comme le rapport signal sur bruit sortant sur le rapport signal sur
bruit entrant :
ent
sort
SNR
SNR=ρ (2.10)
avec :
( )
( ) ( )( )
−=
∑∑
∑∑
= =
= =
x y
x y
N
1i
N
1j
2
N
1i
N
1j
2
10ent
j,iFj,iI
j,iF
log10SNR et
( )
( ) ( )( )
−=
∑∑
∑∑
= =
= =
x y
x y
N
1i
N
1j
2
0
N
1i
N
1j
20
10sort
j,iFj,iF
j,iF
log10SNR
où F est l'image simulée non bruitée, I l'image simulée bruitée, F l'image résultante après
traitement de l'image bruitée I, 0F l'image résultante après traitement de l'image non bruitée F,
Nx*Ny le nombre de pixels des images.
L'erreur quadratique moyenne est calculée entre l'image sans bruit F et l'image filtrée F
obtenue à partir de l'image I, après application du processus de rehaussement.
( ) ( )( )yx
N
1i
2N
1j
NN
j,iFj,iF
MSE
x y
∑∑= =
−= (2.11)

56
2.4.4 Résultats obtenus Les résultats obtenus sont relatifs aux 4 combinaisons possibles associant les deux paramètres
de seuil (Tl et Tg) ainsi que les deux fonctions de modification du contraste. Ils sont regroupés
pour le niveau de bruit le plus élevé ( SNR=9dB) dans la figure 2.7. La figure 2.8 donne un
exemple de résultat obtenu sur les images simulées.
0 10 20 30 40 50 60 70
2.4
2.6
2.8
3 (9dB)
Contraste (%)
Par
amèt
re
ρ
0 10 20 30 40 50 60 70
2.5
3
3.5 (9dB)
Contraste (%)
Par
amèt
re
ρ
0 10 20 30 40 50 60 70
2.4
2.6
2.8
3
3.2 (9dB)
Contraste (%)
Par
amèt
re
ρ
(a1) (a2) (a3)
0 10 20 30 40 50 60 70 30
40 50
60 70
80 90
(9dB)
Contraste(%)
MS
E
0 10 20 30 40 50 60 70 20
40
60
80
100
120
(9dB)
Contraste (%)
MS
E
0 10 20 30 40 50 60 70 20
40
60
80
100
(9dB)
Contraste (%)
MS
E
(b1) (b2) (b3) Fig. 2.7 : Parametres ρ et MSE en fonction du niveau de contraste, pour un niveau de bruit élevé SNR=9dB : (a1), (b1) : images_micro; (a2), (b2) : images_masse ; (a3), (b3) : images_fibre
• : poly_global; : trig_global; : poly_local; : trig_local;

57
Fig. 2.8 : Résultats de débruitage sur des images simulées : (a), (b) et (c) images simulées ; (d), (e) et (f)
résultats du débruitage en utilisant la fonction optimale correspondante.
La fonction trigonométrique de rehaussement de contraste associée au paramètre de seuil
global (trig-global) est la plus performante dans le cas du faible niveau de bruit (21 dB). Des
résultats similaires sont obtenus pour le niveau de bruit intermédiaire (15 dB). Les résultats
pour un fort niveau de bruit (9 dB) diffèrent en fonction du type d’objet simulé. La fonction
de rehaussement polynomiale associée au paramètre de seuil local (poly_local) est la mieux
adaptée pour les images_micro quel que soit leur contraste. En revanche, la fonction
polynomiale associée au paramètre de seuil global (poly_global) donne de meilleurs résultats
pour les images_masse dont le contraste est inférieur à 35% et pour l’ensemble des
images_fibre quel que soit le contraste. Pour les images_masse dont le contraste est supérieur
à 35%, c'est la méthode (trig_global) qui permet d'avoir les valeurs de ρ les plus élevées.
L'étude du paramètre MSE conduit aux mêmes conclusions à savoir que les meilleures
performances (faible valeurs du paramètre MSE) sont obtenues avec (trig_global) pour les
images présentant un niveau de bruit faible ou intermédiaire. Lorsque le niveau de bruit est
élevé, les résultats différent suivant les objets simulés.
Au vu de ces résultats, la fonction trigonométrique associée au paramètre de seuil global
permet d’obtenir un bon compromis entre la réduction du bruit (paramètre ρρρρ) et la
préservation des contours (critère MSE).
(a)
(e) (f) (d)
(b) (c)

58
Cette méthode a été comparée à celle obtenue en utilisant un filtre médian 5*5 et un filtre
ANS [11] (ANS "Adaptive Noise Smoothing") qui tient compte des propriétés du bruit
caractéristiques des images mammographiques.
Le paramètre ρ a été évalué pour les six méthodes et les résultats obtenus pour les images
avec un SNR de 15 dB, sont résumés dans le tableau 2.1.
Le paramètre MSE avant traitement (entre l’image sans bruit f et l’image bruité g) et après
traitement (entre l’image sans bruit f et l’image filtrée f ) a été évalué et les résultats sont
donnés dans le tableau ci-dessous :
Paramètre MSE Paramètre ρ
image_masse image_micro image_fibre image_masse mage_micro Image_fibre Image bruitée 517.72 499.10 507.45 Filtre médian 39.24 38.51 37.26 1.73 1.73 1.74 Filtre ANS 20.60 20.74 20.59 1.92 1.91 1.91 trig_global 4.71 4.26 5.94 2.35 2.41 2.28
trig_local 26.22 21.38 26.11 1.85 1.90 1.85 poly_local 10.91 10.15 10.58 2.10 2.12 2.11 poly_global 10.56 26.12 11.15 2.12 1.87 2.11
Tab. 2.1: Paramètres ρ et MSE évalués sur les images simulées avec un SNR de 15 dB après applications des quatre méthodes de débruitage, du filtre médian et du filtre ANS. Le paramètre MSE a été aussi évalué pour
chaque image bruitée avant rehaussement.
La fonction de rehaussement trigonométrique associée au paramètre de seuil global (trig-
global) donne la plus petite valeur pour le paramètre MSE et la plus grande valeur pour le
paramètre ρ. En résumé, les images simulées nous ont permis d’étudier l’efficacité des
différentes méthodes de manière quantitative. Il en résulte que la fonction de rehaussement la
mieux adaptée à nos images pour le débruitage est la fonction trigonométrique associée au
seuil global (trig_global). C'est celle qui assure un bon compromis entre la réduction du bruit
et la préservation des contours des objets.

59
2.5 Optimisation de la méthode
A partir de l’étude précédente, nous avons voulu généraliser le choix de la fonction de
modification du contraste en se basant sur l’optimisation d’un critère. La recherche d’une telle
fonction, suppose que l’on dispose d’un modèle la décrivant et d’un critère dont la
minimisation (dans notre cas) permet d’estimer au mieux (tout au moins au sens du critère
choisi) les paramètres la définissant.
Dans le schéma fonctionnel de la figure 2.2, seuls la recherche de la fonction de modification
de contraste ψ ainsi que le voisinage de calcul du contraste local font l’objet de cette partie.
Toutes les notations déjà utilisées restent inchangées. Pour s’affranchir des paramètres liés à
la définition du voisinage à savoir le seuil T et le pourcentage P (voir § 2.3.1), nous
reformulons les régions centre et fond de la manière suivante : deux fenêtres de taille
(2p+1)×(2p+1) et (2p+3)×(2p+3), centrées autour de chaque pixel (i,j) de l’image I sont
définies dans un premier temps.
La région centre représente alors l’ensemble des pixels appartenant à la fenêtre interne (de
taille (2p+1)×(2p+1)) et la région fond est l’ensemble des pixels contenus dans la fenêtre
externe (de taille (2p+3)×(2p+3)) à l’exception de ceux de la région centre (ces pixels sont
situés dans la couronne de section carrée autour de la fenêtre interne). Le contraste local C(i,j)
est donné par l’équation (2.4) où Mc(i,j) et Mb(i,j) représentent respectivement la moyenne des
valeurs en niveaux de gris des pixels de la région centre et de la région fond.
Rappelons que l’image observée I que l’on souhaite débruiter suit le modèle de l’équation
(2.8) et que l’image débruitée E est obtenue par le processus de la figure 2.2.
Nous proposons alors de rechercher la fonction ψ qui minimise l’erreur quadratique moyenne
entre l’image F non bruitée intervenant dans la définition de l’image observée I (2.8) et
l’image E obtenue par la méthode développée.
E(i,j)][F(i,j)NN
1MSE
I(i,j)
2
yx∑
∈−= (2.12)
Dans un premier temps, il sera question de rechercher cette fonction comme une constante
dans l’intervalle [0,1] puis nous aborderons le cas général d’une fonction ψ constante par
morceaux sur ce même intervalle de définition.

60
2.5.1 Cas d’une fonction constante
Ψ: [0,1] → IR
x → Ψ(x)=α
Soient les ensembles définis comme suit :
G=(i,j)∈I / Mc(i,j)<Mb(i,j) et H=(i,j)∈I / Mc(i,j)≥Mb(i,j). Notons aussi β=1-α.
L’erreur quadratique moyenne s’exprime alors moyennant l’utilisation de (2.6) et (2.12)
( )
yx
G(i,j) H(i,j)
2b2
b
NN
β
(i,j)MF(i,j)(i,j)βMF(i,j)
MSE∑ ∑
∈ ∈
−+−
= (2.13)
La minimization du MSE passe par la résolution de l’équation 0dβ
d(MSE) = , qui s’exprime
comme suit :
( ) 0β
(i,j)MF(i,j)
β
(i,j)M(i,j)βM-F(i,j)(i,j)M
G(i,j) H(i,j)
b2
bbb =
−++∑ ∑
∈ ∈ (2.14)
Le développement de l’expression précédente permet alors d’aboutir à la recherche des
racines du polynôme P(β) suivant :
( ) ( ) ∑∑∑∑∈∈∈∈
−
+
−
=
H(i,j)
2b
H(i,j)b
3
G(i,j)b
4
G(i,j)
2b (i,j)Mβ)(i,j)F(i,jMβ)(i,j)F(i,jMβ(i,j)M)P(β
(2.15)
Ce polynôme admet au moins une racine réelle [12] laquelle racine définit la fonction Ψ.
2.5.2 Cas d’une fonction constante par morceaux
Ψ: [0,1] → IR
x → )x(h_1M
1kkk∑
=α=Ψ
où 1_hk désigne la fonction indicatrice de l’intervalle
−=M
k,
M
1khk (
−= 1,M
1MhM ), αk
la valeur prise par la fonction Ψ sur cet intervalle et M le nombre partitions de l’intervalle
[0,1] ; Notons kk h)j,i(C/H)j,i(H ∈∈= , kk h)j,i(C/G)j,i(L ∈∈= et βk=1-αk.

61
La minimisation du MSE conduit à la recherché des racines des M équations suivantes :
0(i,j)Mβ)(i,j)F(i,jMβ)(i,j)F(i,jMβ(i,j)Mkkkk H(i,j)
2bk
H(i,j)b
3k
L(i,j)b
4k
L(i,j)
2b =−
+
−
∑∑∑∑∈∈∈∈
(2.16)
La fonction Ψ est alors définie par les valeurs αk (k=1,2…M) solutions des M équations
définies pour chaque intervalle hk.
2.5.3 Quelques résultats
L’évaluation des fonctions de modification de contraste obtenues par la méthode
d’optimisation est effectuée sur des images simulées élaborées sur le même principe que celui
utilisé au paragraphe 2.4.2.
Dans ce cadre, et pour limiter le nombre de tests, seules les images_massse et les
images_fibrelinéiques ont été utilisées. Quatre niveaux de bruit (21, 15, 9 et 3 dB) ainsi que 4
valeurs de contraste global (10, 20, 30 et 40%) sont simulées (voir figure 2.9)

62
(a) (f)
(b) (g)
(c) (h)
(d) (i)
(e) (j) Fig. 2.9 : Exemple d’images simulées: (a) et (f) image_masse et image_fibre correspondant à contraste global
de 10% ; (b), (c),(d) et (e): images_ masse bruitées correspondent respectivement à un SNR=21 dB, 15 dB, 9 dB
et 3 dB ; (g), (h) (i) and (j) images_fibre bruitées dans les mêmes conditions que (b) (c),(d) et (e).

63
0 0.01 0,02 0,03 0,04
0
0.01
0.02
0.03
0.04
(a)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
(b)
(c)
Fig. 2.10 : Fonction optimale ψ de modification du contraste obtenue pour les images de la figure 2.9 :
(a) : image 2.9(b); (b): image 2.9 (c); (c) : image 2.9(d)
0 0.02 0.04 0.06 0.08 0.1 0.12
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Local contrast C
Local contrast C
ψ
ψ
Local contrast C
ψ

64
Différents tests sur la taille des fenêtres de calcul du contraste C(i,j) ont été effectués sur les
32 images simulées pour ne retenir que celles donnant la plus petite valeur du MSE.
Les images C (contraste local) présentaient des valeurs de contrastes n’excédant pas 0.15. Les
fonctions de modification de contraste obtenues ont donc été définies dans l’intervalle
correspondant. La figure 2.10 donne des exemples de fonction ψ relative aux images 2.9(b),
2.9(c) et 2.9(d).
Sur l’ensemble des images testées, les fonctions de modification du contraste obtenues
peuvent être considérées comme linéaires.
En entreprenant de rechercher la fonction optimale sous cette forme linéaire Ψ(C)= aC, et en
utilisant la minimisation du MSE comme précédemment, nous obtenons alors [12]:
( ) ( )
∑∑
∑∑
∈∈
∈∈
+
−+−≈
H(i,j)
22b
2
G(i,j)b
H(i,j)bc
G(i,j)bb
C(i,j)(i,j)M)(i,j)C(i,jF(i,j)M
(i,j)MF(i,j))(i,j)C(i,jMF(i,j)(i,j)M)(i,j)C(i,jM
a (2.17)
Très peu de différences ont été observées sur le MSE obtenu entre les deux formes de
fonction Ψ -constante par morceaux (2.16) et linéaire (2.17)- sur l’ensemble des images
artificielles testées. La recherche des racines du polynôme s’avérant plus gourmande en temps
de calcul, nous avons adopté la forme linéaire.
Les résultats obtenus montrent que la pente de la fonction Ψ dépend du contraste global de
l’image non bruitée pour les faibles niveaux de bruit (SNR élevé). Lorsque le rapport signal
sur bruit décroît, cette même pente tend vers une limite. La figure 2.11 donne un exemple des
résultats obtenus sur les images de la figure 2.9.
Nous avons procédé à la suite de ces tests, à une comparaison de la méthode développée avec
trois autres méthodes de débruitage : le filtre médian, le lissage adaptatif de bruit ANS [11] et
le lissage par utilisation des Equations aux Dérivées Partielles EDP [13]. Le critère de
comparaison retenu est le MSE et les fenêtres de calcul pour chacun des filtres ont été
choisies pour minimiser ce critère. Le tableau 2.2 résume les résultats obtenus sur les images
artificielles de la figure 2.9. Ces résultats montrent de meilleures performances en terme de
MSE de la méthode développé sur les autres techniques.

65
(a) (e)
(b) (f)
(c) (g)
(d) (i)
Fig. 2.11: Résultats de débruitage sur les images de la figure 2.11 :
(a), (b), (c) and (d): images résultats des figures 2.9(b), 2.9(c), 2.9(d) et 2.9(e) respectivement.
(e), (f), (g) and (h): images résultats des figures. 2.9(g), 2.9(h), 2.9(i) et 2.9 (j) respectivement.

66
Image_masse
Image_fibre
image 2.9(b)
image 2.9(c)
image 2.9(d)
image 2.9(e)
image 2.9(g)
image 2.9(h)
image 2.9(i)
image 2.9(j)
Image bruitée
128.31 513.25 2045.28 7202.14 124.85 504.46 1980.11 6978.91
Filtre Median
0.99 2.38 4.83 9.69 2.04 4.19 8.32 14.50
Filtre ANS 1.68 2.84 5.01 10.56 2.83 5.30 7.92 16.01
Débruitage utilisant les
PDE
1.05 1.92 3.87 9.54 1.98 3.89 7.30 13.89
Méthode
proposée
0.74 1.61 3.38 8.32 1.46 2.91 5.39 12.45
Tab. 2.2 : Résultats de comparaison de la méthode proposée avec d’autres méthodes de débruitage. Calcul du
paramètre MSE entre les images non bruitées de la figure 2.9 et les images obtenues en utilisant les différents
filtres. Ce paramètre a aussi été calculé sur les images bruitées de la figure 2.9 avant traitement.

67
2.6 Application au contrôle de qualité des installations
mammographiques par traitement d’images
Les développements précédents ont été utilisés dans le cadre d’une application médicale : le
contrôle de qualité dans les installations de mammographies. Avant d’aborder les aspects plus
liés au traitement d’image, une présentation du contexte, de la problématique et des finalités
de cette application sont développées dans ce qui suit.
Cette application est le fruit d’une collaboration de plusieurs années avec l’association
ARCADES (Association pour la Recherche et le Dépistage des Cancers du Sein et du col de
l’utérus) en charge des campagnes de dépistage des cancers du sein dans le département des
Bouches-du-Rhône.
2.6.1 Introduction et description des traitements
Le cancer du sein est le cancer le plus fréquemment rencontré chez la femme (28 % des cas de
cancers). Il touche environ 1 femme sur 8 et il est malheureusement prévu une augmentation
de ce pourcentage dans les années à venir. Devant l’absence de révolution thérapeutique et
malgré les énormes moyens engagés depuis 40 ans, l’accent est mis actuellement sur la
prévention, la détection et le traitement précoces. Il a été établi qu'un véritable dépistage de
masse réduirait de 30% le taux de mortalité chez les femmes après 50 ans. La mammographie
est à l’heure actuelle, la technique la plus répandue et la plus sensible pour détecter les
anomalies liées à ce type de cancer. Pour être pleinement efficace, et en particulier dans la
perspective d’un dépistage précoce, le cliché mammographique doit être de la meilleure
qualité possible. Ceci nécessite, en amont, un contrôle de la qualité des installations de
mammographies portant sur: l’état fonctionnel du mammographe, l’état des récepteurs
(films), la chambre noire de développement, les conditions de lecture et la qualité image.
Cette dernière est évaluée à partir du cliché d’un fantôme et consiste à mesurer une densité
optique de référence, à contrôler des courbes de sensitométrie puis à établir un score qualité
image. Le fantôme est un objet ayant la forme anatomique et la réponse radiographique d’un
sein moyen et ferme. Il est constitué de matériaux dont les coefficients d’atténuation aux
rayons X sont équivalents à ceux des tissus mammaires, dans la gamme généralement utilisée
de la tension accélératrice des électrons responsable de l’émission de rayons X. Il comporte
des inclusions de tailles variées et connues, et de différents contrastes. A l’heure actuelle,
l’évaluation du score qualité image consiste à réaliser un cliché de fantôme puis à le soumettre

68
à plusieurs experts qui ont font une lecture visuelle. Ces derniers, en fonction du nombre
d’inclusions qu'ils observent sur le cliché, attribuent un score caractérisant la qualité de la
chaîne qui a permis d’obtenir le cliché. L'utilisation de méthodes d'analyse d'images
numérisées de clichés de fantômes devrait permettre de s’affranchir du caractère subjectif de
la lecture visuelle et d’accéder ainsi à une information plus objective et reproductible, et par
suite d’améliorer l’évaluation des sites de production de clichés mammographiques. Ces
techniques permettront également de comparer quantitativement les sites de radiologies afin
d'effectuer des campagnes de dépistage des cancers du sein dans les mêmes conditions
d'acquisition des clichés mammographiques. Il existe plusieurs types de fantômes dans le
commerce. Le fantôme MTM 100/R de Medi-Test retenu dans cette étude est celui utilisé par
l’association ARCADES (Association pour la Recherche et le Dépistage des Cancers du Sein
et du col de l’utérus) dans le cadre du contrôle de qualité des installations de mammographie
participant aux campagnes de dépistage du cancer du sein dans le département des Bouches-
du-Rhône. Il est essentiellement constitué de 50% de résine possédant les mêmes propriétés
d’atténuation aux rayons X qu’un tissu glandulaire et de 50 % de résine possédant les
propriétés d’atténuation d’un tissu adipeux. Les inclusions contenues dans ce fantôme
simulent trois types d’objets : les amas de microcalcifications, les masses tumorales et les
structures fibreuses. Les amas de microcalcifications sont répartis suivant 7 groupes M1 à M7
de 6 microcalcifications chacun, les masses (ou nodules) notées N1 à N7 et les fibres notées
F1 à F7 sont également au nombre de 7. La taille ainsi que le contraste des différentes
inclusions vont en décroissant, ainsi N1 est la masse dont le diamètre est le plus grand et pour
lequel le contraste (objet/fond) est le plus élevé, la suivante N2 est moins visible et ainsi de
suite. La figure 2.12 représente une coupe schématique du fantôme MTM 100/R.

69
Fig. 2.12 : Schéma descriptif du fantôme MTM 100/R
Mi (i=1..7) amas de microcalcifications; Ni (i=1..7) nodules ou masses, Fi (i=1..7) fibres, H et V échelles de
résolution horizontale et verticale, B billes d’alignement, Z zones de densité optique de référence, C1 et C2
plages de contraste, D cavités de mesure de la dose de rayon X administrée.
M1
M2
M3
M4
M5
N2M6
M7
N1
N3
N4
N5
N6
N7
F1
F2
F3F4
F5
F6
F7
Basis
C1 C2
Z
H
V
Envelope
B BD D D

70
Le schéma fonctionnel des traitements appliqués aux images numérisés de clichés du fantôme
MTM 100/R est décrit ci-dessous (figure 2.13):
Fig. 2.13 : Organigramme des traitements appliqués aux images du fantôme
Numérisation des clichés du fantôme
Extraction de régions d’intérêt
Débruitage des basses fréquences
Débruitage des hautes fréquences
Rehaussement de contraste
Segmentation

71
2.6.2 Numérisation
La numérisation de clichés de fantôme a été réalisée au moyen d’un scanner à tambour de très
haute résolution (Scanmate 11000 de ScanView A/S, Meterbuen 6, DK-2740 Solvlunde,
Denmark) qui peut numériser à des résolutions allant de 50 à 11000 dpi (dots per inch) et code
les pixels sur 256 (8 bits/pixel) ou 16384 niveaux de gris (14 bits/pixel). La résolution spatiale
de numérisation a été fixée à 50 µm/pixel (508 dpi). Ce choix correspond approximativement
au pouvoir de résolution d’un observateur humain (avec un pouvoir de résolution standard de
4.10-3 rd) utilisant une loupe de grossissement 2, semblable à celle utilisée par les
radiologistes lors de l’examen clinique d’une mammographie. Chaque pixel de l’image
scannée est codé sur 256 niveaux de gris et l’image numérisée d’un cliché de fantôme (20 ×
10 cm2) a pour taille 4000×2000 pixels, compte tenu de la résolution adoptée.
Ce matériel a été obtenu dans le cadre d’une collaboration avec l’association ARCADES, le
Laboratoire de cancérologie expérimentale (Unité INSERM) et Laboratoire d’Imagerie
Médicale (Hôpital de la Timone) et financé par la Ligue contre le Cancer.
2.6.3 Extraction de régions d’intérêt
On dispose d’informations a priori sur la position, la taille et le type d’objets à détecter. On
utilise ces informations une fois le cliché du fantôme numérisé, pour en extraire des sous-
images associées chacune à une inclusion (amas de microcalcifications, masse ou fibre).
Cette étape consiste à extraire manuellement des sous-images centrées autour des objets
d’intérêt que sont les amas de microcalcifications, les masses et les fibres. La figure 2.14
montre un exemple d’extraction de ces inclusions.
Fig. 2.14 : Images extraites d'un cliché de fantôme numérisé représentant
(a) un amas de microcalcifications (256×256 pixels) M1; (b) une masse (256×256 pixels) N1 ; (c) une fibre
(412×412 pixels) F1.
(a) (b) (c)

72
2.6.4 Description générale des traitements
♦ Chaque sous-image subit alors deux phases de traitement, une phase de débruitage et une
phase de rehaussement de contraste, avant d'aboutir à l'étape de segmentation. Les images
extraites du cliché de fantôme numérisé sont fortement bruitées et très peu contrastées (figure
2.14). Le bruit contenu dans ces images peut-être modélisé par un bruit basse fréquence B1
(visible au niveau de la variation lente de niveau de gris du fond non homogène de ces
images) et un bruit de fréquence plus élevé B2 inhérent au processus radiologique (bruit
quantique et bruit de granularité du film), connu pour être un bruit de type Poisson [1-2].
L'étape débruitage englobe en fait la suppression du fond non homogène suivi d'un filtrage du
bruit B2. L'étape notée rehaussement de contraste permet d'amplifier de façon sélective le
signal utile (microcalcifications, masse ou fibre) de manière à préparer l'image à l'étape de
segmentation.
Le filtrage du bruit B2 ainsi que le rehaussement de contraste sont basés sur la même
méthodologie, avec des spécificités selon la nature du traitement. Cette méthodologie dont la
description a été donnée dans les paragraphes précédents, fait partie des traitements communs
subis par l’ensemble des inclusions. Elle est basée sur le filtrage schématisé sur la figure 2.3.
La détermination de la fonction adéquate de modification d’un contraste locale a été décrite
dans la partie relative à l’optimisation de la méthode (voir § 2.5). La suppression du fond
non homogène ainsi que la l’étape de segmentation ont été traitées de façon spécifique selon
la nature des objets à détecter et sont détaillées dans les paragraphes relatifs au traitement de
chaque inclusion.
♦ Pour s'affranchir du fond non-uniforme des images de microcalcifications, nous avons
procédé à la décomposition multirésolution de celles-ci, en utilisant le modèle pyramidal de
Burt [14]. Les images de masses et de fibres ont subi un autre type de traitement. Compte tenu
de leur taille par rapport à celle des images les contenant, ces objets apparaissent comme des
signaux basse fréquence. La méthode précédente (Pyramide de Burt) n'est alors plus adaptée
car elle prend en compte tout ou partie de ces objets. Pour extraire le fond non-uniforme de
ces images, la méthode de transformation locale de contraste décrite précédemment a été
utilisée en associant cette fois-ci la fonction tangente à une grande fenêtre Wmax (voir § 2.3.1).
Le fond extrait des images de microcalcifications, de masse et de fibre apparaît sur la figure
2.15.

73
Fig. 2.15 : Suppression du fond non uniforme des images extraites du fantôme (a), (d) et (g) images initiales : M1, N1 et F1
(b), (e) et (h) images représentant le fond
(c), (f) et (i) images corrigées avec un fond uniforme
♦ Pour chaque type d'inclusion, l'image corrigée (en sortie de l'étape "suppression du fond")
résulte de la soustraction entre l'image de départ et l'image représentant le fond. Pour éviter
de travailler avec des niveaux de gris négatifs, un décalage adapté à ces images est effectué en
tenant compte de leur valeur de niveau de gris minimum. La phase de prétraitement,
comprenant la suppression du fond, le débruitage, le rehaussement de contraste, est illustrée
sur la figure 2.16 pour chaque type d'inclusion. Les images en sortie de l’étape rehaussement
de contraste seront notées désormais Inet.
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)

74
Fig. 2.16 : Prétraitement des images extraites d'un cliché de fantôme numérisé.
(a), (d), (g) : images brutes de la figure 2.16
(b), (e), (h) : images débruitées
(c), (f), (i) : images rehaussées
2.6.5 Segmentation
♦ La segmentation des amas de microcalcifications est essentiellement basée sur le calcul
d'une intercorrélation entre l'image issue de la phase de prétraitement Inet et un masque Mmic
représentant une microcalcification.
Le masque utilisé (image Mmic) est une image représentant une microcalcification sous la
forme d'un disque dont les caractéristiques dépendent de l'amas étudié et ont été choisies de
manière à optimiser la localisation des microcalcifications. La taille en pixels du rayon a été
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)

75
fixée sur la base des données fournies par le constructeur du fantôme et de la résolution de
numérisation.
L'image d’intercorrélation Ic ainsi obtenue présente des pics dont il faut choisir les plus
significatifs. Cette opération est simplement réalisée en utilisant un seuil automatique global
fixé en fonction de la valeur du pic le plus élevé contenu dans Ic.
Un étiquetage Ietiq connexe permet alors le comptage des objets détectés. La dernière étape
consiste à extraire l'amas étudié. A cet effet le barycentre de chaque objet détecté est calculé.
On définit autour de chaque barycentre une fenêtre carrée. Dans l'image Inet, on calcule la
moyenne et l’écart-type des pixels correspondant à la fenêtre. Une combinaison linéaire de
ces deux paramètres détermine le sueil permettant d’obtenir l’image segmentée finale Ifin. La
figure 2.17 donne un exemple des images obtenues allant de l'image Inet à l'image Ifin.
Fig. 2.17 : Segmentation de l'amas de microcalcifications de la figure 2.17 (a) (a) : image Inet de la figure 2.18 (c), (b): image Ic, (c) : Image Ietiq, (d) : image Ifin
♦ La segmentation des masses est essentiellement basée sur l'utilisation d'un contour actif. Le
seuillage global pratiqué sur l'image Inet issue de la phase de prétraitement, est fixé à la valeur
du décalage subi par l'image brute à la fin de la phase de suppression du fond. Le contour actif
utilisé est par conséquent basique dans la mesure où l'image traitée Iseuil est binaire, et que
l'énergie utilisée dans ce cas se limite à celle du gradient (utilisation des masques de Sobel).
(a) (b)
(c) (d)

76
L'idée de base pour construire ce contour a été de fixer au centre de l'image, un carré dont la
taille dépend de la masse traitée. L'algorithme de déplacement des nœuds du carré est le
suivant :
- Déplacement d'un nœud i le long de la perpendiculaire au segment [i-1, i+1] jusqu'à
atteindre un point du bord de la masse.
- Lorsque les 4 points ont atteint la frontière de la masse, on vient insérer un point entre deux
nœuds consécutifs. Ces points insérés se déplacent alors selon le même schéma de principe
que les nœuds du carré initial. En tenant compte de la valeur en niveaux de gris du nœud
déplacé, on peut prévoir son sens de déplacement. L'évolution du contour actif s'arrête lorsque
un nombre d'itérations suffisamment grand est atteint ou qu'aucun nœud ne peut être rajouté,
compte tenu d'une distance minimale fixée au départ. La figure 2.18 montre un exemple de
segmentation de la masse extraite d'un fantôme et apparaissant figure 2.14(b).
Fig. 2.18 : Segmentation de la masse de la figure 2.14 (b).
(a): Image Inet issue de la phase de prétraitement ( figure 2.16 (f));(b) : Image Iseuil; (c) : Initialisation du contour actif; (d) : Positionnement des 4 premiers nœuds; (e) : Etape de segmentation intermédiaire ; (f) : Image Ifin de
la masse segmentée
(a) (b)
(c) (d)
(e) (f)

77
♦ La segmentation des fibres a été mise en place sur la base d'un calcul d'intercorrélation en
deux temps entre l'image Inet seuillée issue de la phase de prétraitement, et deux masques Mfib1
et Mfib2 représentant une partie de la fibre dans deux directions perpendiculaires.
A l'inverse des masses, deux seuils sont fixés en rapport avec l'histogramme unimodal de
l'image Inet pour ne conserver que la partie principale de la fibre. L'image seuillée
correspondante est Iseuil.
Chaque fibre incluse dans le fantôme étant assimilée à un T incliné, deux directions
privilégiées peuvent être considérées. Le masque Mfib1 (resp Mfib2) est construit pour la
direction 45° (resp 135°). Ces masques représentent une partie de la branche totale de la fibre
dans la direction considérée. La construction de ces masques a nécessité un apprentissage sur
plusieurs images de fantômes afin de fixer les dimensions des rectangles et leur inclinaison.
L'intercorrélation fournit alors deux images Ic,1 et Ic,2 en niveaux de gris pour lesquelles un
seuillage dépendant des pics qui y sont contenus s'impose, afin de ne garder que les objets
significatifs. Les images obtenues correspondantes sont Ic,1,s et Ic,2,s. Pour synthétiser les
résultats de la corrélation dans les deux directions, un OU logique est alors effectué sur ces
images On fait subir à l'image obtenue Iadd un étiquetage connexe dont le résultat final est
l'image Ietiq. La figure 2.19 donne un exemple de segmentation de la fibre extraite d'un
fantôme et apparaissant figure 2.14(c).

78
Fig. 2.19 : Segmentation de la fibre de la figure 2.14(c).
(a) : image Inet issue de la phase de prétraitement (figure 2.16 (i)), (b): image Iseuil, (c) : Image Ic,1
(d) : Image Ic,2, (e) : Image Ic,1,s (f) : Image Ic,2,s, (g) : Image Iadd, (h) : image Ietiq
2.6.6 Résultats
Les traitements décrits ci-dessus ont été appliqués sur 9 images de clichés de fantômes
numérisés issus de 9 sites de production mammographique (9 cabinets de radiologie) [15].
Seuls les 4 premiers objets (parmi 7) de chaque type d'inclusion ont été étudiés. Deux raisons
essentielles nous ont conduits à faire ce choix. En effet, sur ces clichés, le score octroyé
(a) (b)
(c) (d)
(e) (f)
(g) (h)

79
visuellement par les experts a montré que ces derniers n'avaient pu identifier que les objets
numérotés de 1 à 4 pour chaque type d'inclusion. De plus, un cliché est considéré de bonne
qualité (selon le cahier des charges du contrôle qualité) à partir du moment où les objets M1 à
M4, N1 à N4 et F1 à F4 sont détectés visuellement.
Trente six amas de microcalcifications ont donc été étudiés (soit au total 216
microcalcifications). Les amas M1 et M2 n'ont posé aucun problème de détection. Il faut noter
quelques non détections et surtout des fausses alarmes dans les amas M3 et M4, moins
contrastés que les deux premiers. Les microcalcifications qui n'ont pas été détectées sont
celles qui, de part leur très faible contraste se confondent très facilement avec le bruit de
granularité du cliché, et de ce fait sont filtrées au même titre que le bruit lors des différents
traitements. Les fausses alarmes, quant à elles, sont dues essentiellement aux différents
artefacts (niveau de gris très élevés) résultant des arrachements de films et au bruit de
granularité du film, qui sur certains clichés est du même ordre de grandeur que le signal utile
(microcalcification). Le tableau 2.3 résume les résultats obtenus sur l'ensemble des amas de
microcalcifications étudiées. Sur les 216 microcalcifications étudiées, 9 seulement n'ont pas
été détectées. Le scorage effectué ’’ Score mammographie ’’par lecture visuelle consiste à
attribuer un score de 0 si aucune tache n’est visible dans un amas, un score de 0.5 si deux à
trois taches sont visibles et un score de 1 si 4 à 6 taches sont visibles. Dans ce même tableau
ont été reportés, pour les 9 sites, les scores ainsi obtenus par lecture visuelle et ceux résultant
du traitement de l’image numérisée du fantôme ‘’Score méthode’’. On note un très bon accord
entre les deux méthodes.
Sur les trente six masses étudiées, dans un premier temps trois d’entre elles n’ont pas été
détectées. La non détection de ces masses est due en fait à la divergence du contour actif. En
effet lorsque l'image Iseuil présente une masse au sein de laquelle il y a un trou, et qu'un des
nœuds du carré d'initialisation s'y trouve justement, le contour actif ne permet pas de
segmenter cette masse. En déplaçant judicieusement ce carré, c’est-à-dire en imposant une
contrainte sur les nœuds du carré d’initialisation, il a été possible de segmenter ces trois
masses. Vingt fibres parmi 36 initialement prévues ont été étudiées. Il s'agit des fibres F1 et
F3 des neuf sites considérés et deux fibres F2. Toutes les fibres ont été détectées mais leur
segmentation s'est accompagnée de la détection de petites régions n'appartenant pas à la fibre
(figure 2.19) dont la taille ne posera pas de problème d'interprétation dans une phase
ultérieure de caractérisation et d'interprétation des objets détectés. Dans le cas des masses et
des fibres le scorage est obtenu par les lecteurs en attribuant un score de 1 pour les structures
complètement visibles et de 0.5 pour celles qui ne sont pas complètement visibles, par

80
exemple dans le cas des fibres si la longueur de la fibre n’est pas vue dans son entier. Pour
chacun des sites étudiés le score des lecteurs était de 4 aussi bien pour les masses que pour les
fibres c'est-à-dire que les 4 masses et les 4 fibres étaient vues complètement. Ces scores
concordent donc avec ceux déduits du traitement d’image puisque tous les objets étudiés ont
été détectés
Numéro du site 1 2 3 4 5 6 7 8 9
Amas M1
Nombre de
microcalcification
s détectées
6
6
6
6
6
6
6
6
6
Amas M2
Nombre de
microcalcification
s détectées
6
6
6
6
6
6
6
6
6
Amas M3
Nombre de
microcalcification
s détectées
6
6
6
6
5
6
5
6
5
Amas M4
Nombre de
microcalcification
s détectées
6
6
6
6
3
6
5
4
6
Score Méthode
4 4 4 4 3.5 4 4 4 4
Score
mammographie 8 8 8 8 6 8 8 8 8
Tab. 2.3 : Résultats obtenus sur les amas de microcalcifications des 9 sites étudiés

81
2.7 Conclusion
Le travail présenté dans cette partie a porté essentiellement sur le développement d’une
technique de rehaussement d’image à partir de fonctions de modification d’un contraste local,
dépendant des statistiques du voisinage de tout pixel d’une image I. Le choix de la nature de
la fonction de modification du contraste conditionne la nature du traitement : débruitage ou
rehaussement de contraste. La recherche de la fonction optimum au sens des moindres carrés
permettant de débruiter des images entachés de bruit dépendant du signal a été menée et
évaluée sur des images simulées. Les résultats obtenus ont été comparés à d’autres méthodes
de débruitage et ont permis de montrer la supériorité de la technique développée
Ces travaux ont ensuite été appliqués au cas de l’évaluation de la qualité des sites de
mammographies sur des images de fantômes numérisés. Les résultats de débruitage obtenus
permettent d’envisager une automatisation du contrôle de qualité des installations
mammographiques et, dans un cadre plus général, d’intégrer ces travaux dans la nouvelle
génération de mammographes numériques.
Parallèlement à ces travaux, nous avons entamé depuis quelques années le développement
d’une Interface Homme Machine (IHM) intégrant les résultats des recherches présentées dans
ce chapitre. Cette interface est le fruit du travail effectué par les différents stagiaires d’IUT,
d’étudiants de Maîtrise de Physique et d’Ecole d’ingénieurs que j’ai dirigés au sein du
laboratoire. L’idée de ce travail est de fournir aux médecins radiologues un outil d’évaluation
de la qualité d’image par scorage automatique. Les phases de spécification (en collaboration
avec les radiologues), de développement de l’interface et d’intégration des algorithmes de
traitement sont finalisées sur des images de fantômes numérisés. Avec l’arrivée de la nouvelle
génération de mammographes numériques nous sommes en phase de test sur les images
numériques de fantômes. Les essais cliniques sont prévus pour l’année 2009.

82
Bibliographie
1. G. T. BARNES, D.P. CHAKRABORTY, ″ Radiographic mottle and patient exposure in
mammography ″, Radiology 145 (1982) 815-821.
2. S. WEBB, ″ The Physics of Medical Imaging ″, IOP Publishing, Adam Hilger, Bristol and
Philadelphia, 1988.
3. F. AGHADASI, R. K. WARD, B. PALCIC, ″ Noise filtering for mammographic images ″,
Proceeding of the 14th Annual International Conference of the I.E.E.E. Engineering
in Medecine and Biology Society, 1877-1878, (1992).
4. W. QIAN, L. P. CLARKE, M. KALLERGI, R. A. CLARK, ″ Tree-Structured Nonlinear
Filters in Digital Mammography ″, IEEE Trans. Med. Imaging 13(1), 25-36, (1994).
5. P. BECKMAN, ″ Probability in Communication Engineering ″, Glen Wade Editor,
1967.
6. H. C. ANDREW, B. R. HUNT, ″ Digital Image Restoration ″, Englewood Cliffs, NJ:
Prentice-Hall, (1977).
7. M. ADEL, A.C. CARRILERO, M. RASIGNI, B. SERADOUR, P. HEID : ″ Quality
control of mammographic images: automated detection of microcalcifications in phantom
images ″. 5th International Workshop on Digital Mammography, Toronto (Canada),
11-14 June (2000).
8. A. K. JAIN, ″ Fundamentals of Digital Image Processing ″, Prentice Hall International
Editions, (1989).
9. V. GUIS : ″ Traitement numérique d’images de fantômes mammographiques : Application
au contrôle qualité des installations radiologiques et à l’aide au diagnostic de cancer du
sein ″. Thèse de doctorat de l’Université d’Aix-Marseille III, soutenue le 27 Septembre
(2002).
10. V. GUIS, M. ADEL, M. RASIGNI, G. RASIGNI, B. SERADOUR, P. HEID, ″ Adaptive
neighbourhood contrast enhancement in mammographic phantom images ″, Optical
Engineering, 42(2), 357-366, (2003).
11. D. T. KUAN, A. A SHAWCHUK, T. C. STRAND, P. CHAVEL, ″ Adaptive noise
smoothing filter for images with signal-dependent noise ″, IEEE Trans. Pattern Anal.
Mach. Intell. 7(2), 165-177, (1985).

83
12. M. ADEL, D. ZUWALA, M. RASIGNI, S. BOURENNANE, ″ Filtering noise on
mammographic phantom images using local contrast modification functions″. Image and
Vision Computing, doi:10.1016/j.imavis.2008.02.001, accepté (2008).
13. A. YEZZI, ″ Modified curvature motion for image smoothing and enhancement ″, IEEE
Trans. on Image Processing, 7(3), 345-352 (1998).
14. P. J. BURT, E. H. ADELSON, ″ The Laplacian pyramid as a compact image code ″,
IEEE Trans. Commun., 31, 532-540, (1983).
15. M. ADEL, V.GUIS, M. RASIGNI :″ Etude de la faisabilité du scorage automatique de
fantômes mammographiques par traitement d’images ″ . Innovation Technologiques en
Biologie et Médecine (ITBM-RBM), 25, 313-323, (2004).

84
Chapitre 3
Segmentation statistique de régions d’intérêt
3.1 Introduction
La segmentation est une étape incontournable dans tout système d’aide à la détection et à la
reconnaissance utilisant des images. Dans le cas de l’imagerie médicale, cette phase est
importante dans la perspective du suivi objectif de l’évolution d’une maladie par des
méthodes numériques. L’étape clef de tout système d’aide au diagnostic consiste à délimiter
les zones d’intérêt médical : lésions, organes, etc.. avant d’aborder des aspects de plus haut
niveau que sont l’interprétation des régions détectées.
Sans exposer l’ensemble des méthodes de segmentation, rappelons que deux approches
existent : la segmentation ’’régions’’ qui vise à créer une partition de l’image en un ensemble
de régions homogènes au sens d’un ou plusieurs critères, et les approches ’’contours’’ qui
travaillent sur les discontinuités des images afin de déterminer les frontières des régions.
Parallèlement, des méthodes faisant intervenir une coopération des approches ’’régions’’ et
’’contours’’ ont été développées. Cette classification faite, la segmentation n’en demeure pas
moins un problème dépendant de l’application, où l’adaptation des algorithmes doit
constamment évoluer et être renouvelée en fonction du contenu de l’image.
Avant d’aborder cette partie consacrée à la segmentation, il est important de préciser le cadre
de l’étude ainsi que les hypothèses de travail. On se place dans le cas d’objets peu contrastés,
contenus dans des images bruitées. Dans le cas où la démarche adoptée est une approche
’’régions’’, il s’agit essentiellement de segmenter en affectant à chaque pixel une classe
d’appartenance (étiquetage fond ou objet). Dans le cas d’une démarche ’’contours’’, on
recherchera une rupture statistique entre l’objet et le fond faisant ainsi apparaître une
frontière. Dans la suite, seront rappelés brièvement les fondement théoriques, à savoir la
théorie statistique du signal et la modélisation Markovienne, sur lesquels reposent les
méthodes développées dans ce chapitre. Les applications médicales seront ensuite abordées.
Elles concernent l’aide au diagnostic dans le cas de deux pathologies : le cancer du sein et les
rétinopathies.
Le travail présenté dans ce troisième chapitre a été effectué en grande partie dans le
cadre des thèses de A. Haddouche, A. Barthes et A. Moussaoui ainsi que les stages de

85
Master Recherche de P. D’entraigues, A. Allaoui et G. Bezot. Ces travaux ont été co-
encadrés avec les Professeurs Monique RASIGNI et Salah BOURENNANE.
3.2 Segmentation ’’régions’’ et théorie statistique du
signal
Les premières approches statistiques de la détection sont basées sur le théorème de Neyman –
Pearson et la méthode Bayesienne qui elle-même repose sur la minimisation du risque de
Bayes [1]. Les deux approches convergent pour le calcul du rapport du maximum de
vraisemblance et divergent sur la manière d’estimer le seuil S auquel doit être comparé ce
rapport. Le choix entre les deux approches dépend fondamentalement de la connaissance a
priori du signal correspondant à l’objet recherché.
3.2.1 Méthode de Bayes
Considérons une image I de N pixels, 2...N 1,n x(n),I == . Pour des raisons de
commodité, nous utiliserons une notation monodimensionnelle. A tout pixel n sont alors
associées deux hypothèses H0 et H1 correspondant respectivement à l’appartenance de n au
bruit et au signal auquel vient se rajouter du bruit.
( ) ( )( ) ( ) ( )
+==
nsn wnx:H
n wnx:H
1
0 (3.1)
où s et w représentent respectivement le signal utile (objet) et le bruit (fond).
A chacune de ces deux hypothèses 0H et 1H est associée une probabilité conditionnelle
( ))k(x/iH P , possibilité d’avoir l’hypothèse iH après avoir observé k)x( (k=1, 2,….N). Afin
de pouvoir décider de l’hypothèse la plus vraisemblable, il nous faut appliquer un critère de
décision. Dans le cadre du test d’hypothèse binaire, quatre configurations caractérisées selon
le concept Bayesien par une fonction de probabilité conditionnelle ( )jiH P H/ existent (i,j
prennent les valeurs 0 ou 1). Il s’agit en l’occurrence de :
. Décider 1H ou bien son complément 0H , dans le cas où ces deux hypothèses choisies sont
vraies : ce sont deux configurations qui représentent respectivement la détection et la non
détection correctes caractérisées par les deux fonctions de probabilités dP et nP telles que :

86
) /HP(HPet)/H(HPP 00n11d == (3.2)
. Décider 1H ou bien son complément 0H , dans le cas où ces deux hypothèses choisies sont
fausses : ce sont deux configurations qui représentent respectivement la fausse alarme et la
non détection dite erronée, caractérisées par les deux fonctions de probabilité faP et neP tels
que :
)/HP(HPet)/H(HPP 10ne01fa == (3.3)
Le test de Bayes s’exprimera par :
/x) (HP/x)(HP 011H
0H
>< (3.4)
Cette relation exprime que l’hypothèse privilégiée (H0 resp. H1) dépend de la comparaison des
probabilités qui leur sont respectivement associées On peut constater à partir du modèle
théorique formulé par l’équation ci-dessus, que privilégier une hypothèse au détriment d’une
autre, dépend directement du résultat que donne le test de comparaison approprié à ce modèle.
Les deux fonctions de probabilités conditionnelles /x)(HP 1 et /x)(HP 0 associées aux deux
hypothèses 1H et 0H correspondent respectivement à la présence de l’objet s recherché et à
celle du bruit w dans l’image I. Elles peuvent s’exprimer selon le formalisme de Bayes
par [1]:
=
=
P(x))P(H)P(x/H
/x) (HP
P(x))P(H)P(x/H
/x)(HP
000
111
(3.5)
Pour aboutir au rapport de vraisemblance qui permet la décision de l’une des deux hypothèses
favorites, on exprime toute probabilité Pen fonction de sa densité de probabilité
conditionnelles ρ .
Le test de comparaison des deux fonctions de probabilité donné par la relation (3.4) devient
alors, compte tenu de (3.5) :

87
))P(Hρ(x/HH
H))P(Hρ(x/H 0011
1
0
>< (3.6)
A partir de cette équation on déduit le test du rapport de vraisemblance nommé dorénavant
( )xL et le seuil S auquel est comparé ce dernier conformément à l’équation ci-dessous :
( ))P(H)P(H
S avec S H
H)ρ(x/H)ρ(x/H
xL1
01
00
1 =><= (3.7)
La détection de l’objet recherché s ainsi que l’estimation de ses paramètres de détection
nécessitent l’évaluation de ce rapport de vraisemblance. Pour minimiser le risque d’une
décision erronée, il nous faut un critère de décision. A cet effet, on peut choisir l’approche de
Bayes lorsqu’ on connaît a priori les probabilités : )P(H0 et )P(H1 . Dans le cas contraire,
c'est-à-dire si l’on possède peu d’informations ou pas du tout à propos de l’objet en question,
on adopte le critère de Neyman-Pearson.
3.2.2 Méthode de Neyman-Pearson
L’approche de Neyman-Pearson [1] consiste à imposer une valeur admissible α pour la
probabilité Pfa et à chercher sous cette contrainte à maximiser la probabilité de la détection
correcte Pd ou ce qui revient au même à minimiser la probabilité de la non détection Pne. Cette
minimisation est obtenue en utilisant les multiplicateurs de Lagrange. L’expression
correspondante notée ( )βF est donnée par l’équation :
( ) ( )αPβPβF fad −+= (3.8)
avec β paramètre de Lagrange associé.
Sachant que :
( )dxx/HρP1H
1d ∫= et ( ) αdxHx/ρP1H
0fa == ∫ (3.9)
où ∫1Hdésigne l’espace ou l’hypothèse H1 est décidée

88
La fonction de Lagrange ( )βF s’écrit alors :
( ) ( ) ( )( ) α βdxHx/pβHx/pβF1H
01 −+= ∫ (3.10)
Pour maximiser la fonction ( )βF , le terme sous l’intégrale contenant la variable x doit être
positif. Le théorème de Neyman-Pearson indique que, sous la contrainte d’une probabilité Pfa
constante et égale à α, maximiser Pd revient à comparer le rapport de vraisemblance L(x) à un
seuil S’.
( ) S β )Hp(x/)Hp(x/
xL0
1 ′=−>= (3.11)
L’hypothèse 1H sera décidée si la condition ( ) SxL ′> est satisfaite, sinon c’est 0H qui sera
décidée.
3.3 Champs de Markov et segmentation Bayesienne
3.3.1 Modèle, contexte et notations
La segmentation ’’régions’’ adoptant une modélisation Markovienne consiste à considérer
une image observée Y comme un champ aléatoire. Délimiter les régions d’intérêt devient
alors un problème d’estimation du champ aléatoire des étiquettes X (image segmentée dans
laquelle chaque pixel possède une étiquette représentant son appartenance à une des régions
contenue dans l’image) qui, dans ce cas, sera modélisé par un champs aléatoire de Markov.
Dans la suite X et Y constituent respectivement l’image des étiquettes et l’image observée. Ce
sont deux champs aléatoires définis sur une grille rectangulaire notée S de taille N. Pour tout
élément (i,j) ou s appartenant à S, est associée une variable aléatoire X(i,j) ou Xs. Notons aussi
x = (x1,x2,…..,xN) et y = (y1,y2,….,yN) des réalisations des champs aléatoires X =
(X1,X2,……XN) et Y = (Y1,Y2,…..YN).
La variable aléatoire Xs prend ses valeurs dans un ensemble noté E et ΩΩΩΩX représente toutes les
réalisations que peut prendre le champ aléatoire X.
Pour décrire les interactions locales des sites (ou pixels), on munit S d’un système de
voisinage noté V défini comme suit :

89
SsS;VV
Vs V tsiet Vs t V
s
tsss
∈∀⊆=∈⇒∈∉=
Un système de cliques est alors associé à V de la manière suivante :
c est une clique si rVsc, alors s, si r ∈∈∀ . L’ensemble des cliques ainsi constituées et
associées au voisinage V est noté C, celui des cliques ne comprenant qu’un point sera noté C1,
celui des cliques avec deux points C2, et celui des cliques contenant i points, Ci.
.....CCCC 321 ∪∪=
Le modèle de Markov est celui généralement choisi pour le champ X des étiquettes. Dans ce
cas X vérifie la condition suivante :
)V r,xX/xP(X)sS-,rxX/xS P(Xs srrssrrss ∈∀===∈==∈∀
où P(A/ B) désigne la probabilité conditionnelle de A sachant B. Cette relation traduit le fait
que la probabilité liée à la variable aléatoire Xs ne dépend que du voisinage Vs du site s.
Définir un champ aléatoire de Markov en termes de probabilités conditionnelles est une tâche
fastidieuse, mais si X suit une distribution de Gibbs, le théorème de Hammersley-Clifford [2]
permet de montrer le caractère Markovien de X. Dans ce cas la probabilité liée à l’image X
s’écrit :
∑ ∑
∑
∈ ∈
∈
−=
−==
XΩx Ccc
Ccc
(x)UexpZ
(x)UexpZ
1x)P(X
(3.12)
où Uc(x) appelée énergie de clique, est une fonction qui dépend des valeurs de x aux pixels
contenus dans la clique c, Z est un facteur de normalisation.
3.3.2 Segmentation Bayesienne
Un des moyens de segmenter une image est d’optimiser un critère donné. Le Maximum a
posteriori (MAP) de l’image des étiquettes X connaissant l’image observée Y, est un critère
généralement utilisé. Il s’exprime en utilisant la relation de Bayes
y)P(Y
x)x)P(Xy/XP(Yy)x/YP(X
======= (3.13)
Maximiser P(X=x/Y=y) se ramène alors à la recherche du maximum du produit
P(Y=y/X=x)P(X=x). P(Y=y) ne dépendant pas de la réalisation x, n’est pas considéré dans le
cadre de cette optimisation.

90
Le terme P(X=x) est donné par (3.12) à partir de la définition des potentiels de cliques Uc. Le
terme P(Y=y/X=x) ne peut être exprimé qu’à partir de certaines hypothèses (très souvent
utilisées dans le cadre de la segmentation) :
- Indépendance des sites qui permet d’exprimer cette probabilité sous la forme :
∏∈
=====Ss
ssss )x/XyP(Yx)y/XP(Y (3.14)
- Un modèle de distribution paramétré permettant de fixer les probabilités conditionnelles
P(Ys=ys/ Xs=xs).
Sous ces hypothèses, la probabilité a posteriori s’exprime comme suit :
( ) ( )y)x /YU(Xexp(x)U)x/XyP(YLnexpy)x/YP(XCc
cSs
ssss ==−∝
−==∝== ∑∑∈∈
(3.15)
Cette relation traduit le fait que le champ des étiquettes X conditionnellement à Y est
Markovien puisque possédant une distribution de Gibbs.
Chercher la réalisation x qui maximise P(X=x/Y=y) revient alors à chercher la réalisation x
qui minimise l’énergie a posteriori :
( ) ∑∑∈∈
+==−===Cc
cSs
ssss )x(U)xX/yY(PLn)yY/xX(U (3.16)
Cette recherche est effectuée en utilisant essentiellement deux algorithmes [3]: le recuit
simulé [4] permettant d’atteindre le minimum global mais qui est lourd en temps de calcul, et
l’ICM [5] (Iterated Conditional Modes), algorithme itératif permettant d’obtenir relativement
rapidement une solution sous-optimale.
Le recuit simulé est un algorithme dédié à la recherche de la configuration optimale d’un
champs de Gibbs. Pour chaque site s de l’image, une étiquette λ est choisie aléatoirement
parmi l’ensemble E des étiquettes.
La différence d’énergie ) / VxU(X)λ / VU(X∆U (k)s
(k)ss
(k)ss =−== est alors calculée en
utilisant (3.16). (k)sx and (k)
sV sont l’étiquette et le voisinage du site s à l’itération k
respectivement. Le site s est alors affecté du label λ si 0∆U ≥ . Dans le cas contraire s
conserve son label de l’itération précédente ou bien prend le label λ en fonction des
probabilités p et 1-p (p=exp(-∆U)).
L’ICM est un algorithme itératif qui consiste à minimiser (3.16). Pour un site s donné, les
probabilités conditionnelles locales )Vr,xX/λP(X s(k)rrs ∈== sont calculées pour chaque

91
valeur de λ de l’ensemble E des étiquettes. Les site est alors affecté de l’étiquette qui
maximise ces probabilités ; à savoir : )Vr,xX/λP(XmaxArg x s(k)rrs
λ
)1(ks ∈===+
.
Parallèlement à cette optimisation, l’estimation des paramètres des probabilités
conditionnelles s’effectue en utilisant l’estimation Bayesienne empirique [6], l’algorithme EM
(Expectation-Maximization) ou d’autres algorithmes. Ces paramètres sont supposés soit fixes
mais inconnus, soit sont considérés comme des variables aléatoires dont il faut estimer
certains moments.
L’estimation Bayesienne empirique repose sur le calcul de la moyenne et de la variance en
utilisant l’image observée Y et les formules classiques d’estimation de ces moments.
L’algorithme EM est basé, quant à lui, sur une approximation de l’estimation au sens du
maximum de vraisemblance en utilisant la connaissance sur les données observées Y.
Introduit par Dempster [7] cet algorithme itératif procède en deux phases: l’étape E
(Estimation) où les probabilités conditionnelles liées aux classes sont estimées et l’étape M
(Maximisation) où les paramètres sont ré-estimés à partir des probabilités calculées dans la
phase précédente et des données observées.

92
3.4 Segmentation des images mammographiques
3.4.1 Introduction
De nombreuses études ont été consacrées au développement de méthodes de traitement
d’image à des fins d’aide au diagnostic et à la détection précoce du cancer du sein [8-11]. Les
techniques proposées considèrent la mammographie dans sa globalité et ne tiennent pas
compte des différents niveaux de densité, de texture et de régions anatomiques du sein que les
radiologues utilisent pour établir un diagnostic. Les images mammographiques sont par
essence difficile à analyser de part leur variabilité naturelle. Une des phases initiales de
l’examen visuel d’une mammographie consiste à estimer la proportion relative de tissus
graisseux et de tissus glandulaires. Cet examen permet, dans un premier temps, de classer
généralement le sein dans une des catégories définies par Wolfe [12], et dans un second temps
de s’intéresser plus particulièrement à la zone glandulaire pour laquelle la probabilité de
trouver un cancer est la plus grande.
Partant de cette constatation, des méthodes de segmentation de mammographies numérisées
en régions anatomiques ont été développées [13-16]. Aylward [13] utilise un modèle dans
lequel le sein est subdivisé en 5 régions qu’il segmente en utilisant des paramètres
géométriques et statistiques. Ferrari [14] entreprend la segmentation du contour extérieur du
sein au moyen d’une méthode de seuillage basée sur la quantification de Lloyd-Max.
Matsubara [15] délimite la partie glandulaire à partir des histogrammes de variance sur des
profils horizontaux et verticaux puis en effectuant une analyse discriminante locale. Zhou [16]
segmente la partie glandulaire du sein en trois étapes comprenant la segmentation de la région
du sein par une méthode de suivi de contour, la compression adaptative de la dynamique en
niveaux de gris de l’image, puis une classification des pixels en utilisant des attributs issus de
l’histogramme.
D’autres méthodes de segmentation sont présentes dans la littérature mais ne traitent pas du
problème spécifique de la segmentation des régions dans une mammographie. Ces études
portent sur la correction de la densité du tissu périphérique du sein [17-18], la localisation
automatique du mamelon [19-20], la quantification de la densité du sein [21], ou l’évaluation
du risque de cancer compte tenu de la densité des régions glandulaires [22-27].
La partie développée dans la suite porte sur la segmentation Bayesienne des régions d’intérêt
d’un sein, à savoir : le muscle pectoral, la zone glandulaire et la zone graisseuse sur une

93
mammographie numérisée, en utilisant la modélisation par champs de Markov. Cette étude
s’inscrit dans le cadre d’un projet beaucoup plus vaste d’aide au diagnostic assisté par
ordinateur visant à prédire le risque de contracter un cancer du sein à partir de la configuration
architecturale des régions d’intérêt sur une mammographie. En analysant les cancers ratés sur
une base d’images mammographiques, dont l’historique serait connu, cette étude permettrait
de corréler certains paramètres statistiques – qui restent à définir- issus des régions d’intérêt
segmentées avec les cas de faux négatifs observés.
3.4.2 Adaptation du modèle
L’image mammographique, dont un exemple est donné en figure 3.1, est constituée
essentiellement des régions d’intérêt suivantes : Le muscle pectoral, la partie glandulaire ou
glande et la partie graisseuse ou graisse. Le fond n’est pas une région d’intérêt en
mammographie mais constitue néanmoins une région au sens de la segmentation et sera donc
prise en compte en tant que telle.
Fig. 3.1 : Les régions d’intérêt d’un sein
L’application de la méthodologie décrite précédemment aux images mammographiques se fait
moyennant certaines hypothèses décrites dans ce qui suit.
La glande Le muscle
La graisse
Le fond

94
Les régions prises en compte (ou classes) dans cette segmentation sont : le fond (classe 0,
notée R0), la glande (classe 1, notée R1), la graisse (classe 2, notée R2) et le muscle pectoral
(classe 3, notée R3). La variable aléatoire Ys liée au site s possède une distribution
conditionnelle gaussienne. La moyenne et la variance de Ys dépendent de l’appartenance du
site s à une des 4 classes prises en compte dans le cadre de cette segmentation.
Ainsi pour chaque classe Ri, 3 2, 1, 0,i∈ , la probabilité conditionnelle P(Ys=ys/ Xs=xs)
s’écrit [28], pour xs∈Ri :
)σ2
)²(y(exp
σπ2
1)xX/yP(Y
2i
is
issss
µ−−=== (3.16)
où µi et σi représentent respectivement la moyenne et l’écart-type de la classe Ri. Par ailleurs,
le système de voisinage considéré est celui du 8-voisinage et les cliques associées sont celles
ne contenant que deux points (C2). La figure 3.2 montre la configuration du 8-voisinage et des
cliques associées (seules les cliques C2 ont été utilisées pour segmenter les images
mammographiques).
Le potentiel retenu est le modèle de Potts isotropique pour lequel les cliques possèdent toutes
le même poids :
≠−=+
=ts
tsc x xsi β
x xsi βU avec c=(xs,xt) clique d’ordre 2
L’énergie a posteriori donnée par (3.16) s’écrit alors :
∑∑∈∈
+
σπ+
σ
µ−===
2s
s
s
Cctsc
Ssx2
x
2xs
)x,x(U)2(Ln2
)y()yY/xX(U (3.17)
où ss xx σet µ représentent la moyenne et l’écart-type de la classe d’appartenance de xs.
C1 C2
C4
C3
Fig. 3.2 : Système du 8-voisinage et les cliques correspondantes.

95
3.4.3 Estimation des paramètres, initialisation et implémentation
Le modèle établi pour la segmentation des mammographies est basé sur la connaissance de la
moyenne et de la variance de chaque classe. Ces paramètres sont supposés fixes mais
inconnus. Leur estimation se fait de manière itérative en utilisant une estimation Bayesienne
empirique. Compte tenu du modèle assez simple des probabilités conditionnelles, cette
méthode nous paraît plus adaptée (en terme de rapport qualité d’estimation / temps de calcul)
que l’algorithme EM pour l’estimation de ces deux paramètres.
L’estimation Bayesienne empirique repose sur le calcul de la moyenne et de la variance en
utilisant l’image observée Y comme suit :
2)1(k-i
Rss(k)
i
(k)2i
Rss(k)
i
(k)i
µ(yN
1)σ(
yN
1µ
(k)i
(k)i
)∑
∑
∈
∈
−=
=
où Ri représente la région représentant la classe i, k l’ordre de l’itération, et Ni le nombre de
points de la classe i.
La segmentation, dont l’organigramme est schématisé dans la figure 3.3, se décompose en
trois grandes phases :
- Une initialisation de l’image des étiquettes X.
- Une simulation itérative du champ des étiquettes comprenant une estimation des paramètres
et une recherche itérative de la configuration minimisant l’énergie a posteriori.
- Un test d’arrêt.
L’initialisation de l’image X des étiquettes joue un rôle important et conditionne souvent les
résultats d’algorithmes itératifs de segmentation tel que celui utilisé dans ce travail. En
théorie, le recuit simulé doit donner un résultat indépendant de l’initialisation car convergeant
vers un minimum absolu de l’énergie a posteriori. Ceci n’est pas toujours chose acquise dans
la pratique, car la convergence peut se faire vers un minimum local. L’initialisation dans le
cas de l’ICM doit en règle générale être proche de la solution finale pour assurer une bonne
segmentation.
Les trois types d’initialisation testés sont :
- La requantification équiprobable de l’image Y en utilisant un algorithme très usité pour
diminuer le nombre de niveaux de gris lorsqu’il s’agit de calculer des matrices de

96
Fig. 3.3 : Organigramme de la segmentation des images mammographiques
Début
0.5%pourcentage ≥
Construction de l'image
d'initialisation initx
0k =
Estimation de
( ) ( ) et k kµ σ
Simulation de ( )kx
1k k= +
vraifaux
Fin
ICM
RS
ICM :Iterative Conditional Modes
RS : Recuit simulé.

97
cooccurrence pour l’analyse de texture. Cet algorithme décrit dans [29] est basé sur le
découpage de l’histogramme cumulé normé de l’image Y de manière à ce que les aires en
dessous de la courbe soient identiques ou très proches. Cette initialisation est notée INIT A.
- La quantification uniforme. Il s’agit de requantifier l’image Y en découpant sa plage de
niveaux de gris de manière uniforme. Cette initialisation est notée INIT B
- Le découpage en un nombre identique de points par classe. Cette initialisation est notée
INIT C.
Le nombre de classes de départ est identique, indépendamment de la méthode d’initialisation
utilisée. La dernière phase de la segmentation concerne le critère d’arrêt. Il est basé sur le
pourcentage de points changeant d’étiquettes entre deux itérations :
( )( )
( ) =
=
−=
++
∈
+∑
sinon 0
x xsi 1x,xδ
N
x,xδ1
(k)s
1)(ks(k)
s1)(k
s
Xs
(k)s
1)(ks
epourcentag
(3.18)
où k est l’indice de l’itération, N est le nombre de points de l’image X et x )k(s est l’étiquette
prise par le site s à l’itération k.
3.4.4 Résultats et discussion
Avec l’aide d’un radiologue expert, cinquante mammographies numérisées issues de la base
d’images mini-MIAS (Mammographic Image Analysis Society) ont été choisies pour
l’évaluation de la méthode. La résolution de ces images de taille 1024×1024 numérisés
initialement à 50 µm/pixel, a été réduite à 200 µm/pixel. Chaque pixel de l’image scannée a
été codé sur 256 niveaux de gris. La base d’images mini-MIAS se présente sous la forme de
trois groupes : seins graisseux (F), seins glandulaires (G) et sein denses (D) incluant des seins
normaux et des seins cancéreux. Nous avons pour notre part choisi de ne prendre que des
seins normaux avec les proportions suivantes : 16(F), 18(G) et 16(D). Il a été demandé à un
médecin de délimiter manuellement les zones d’intérêt sur chacune de ces mammographies.
Pour quantifier les résultats obtenus, et compte tenu de l’importance que revêt -pour les
médecins- la partie glandulaire pour l’établissement d’un diagnostic, l’évaluation a porté
uniquement sur cette région d’intérêt. Ce choix a été essentiellement fait pour les raisons
suivantes :

98
- La proportion de la glande dans la partie utile du sein est un critère utilisé par les
radiologues pour caractériser un sein et le classer.
- C’est la partie du sein où la probabilité d’obtenir un cancer est la plus grande.
Pour chaque mammographie segmentée, nous avons calculé le paramètre R défini comme
suit :
manuseg
manuseg
AA
AAR
∪
∩= (3.19)
Aseg représente l’ensemble des pixels de la glande obtenue par segmentation.
Amanu représente l’ensemble des pixels de la glande délimitée manuellement par le médecin.
| A | représente le cardinal de l’ensemble A.
Un protocole d’évaluation utilisant ce paramètre est alors adopté de la manière suivante : un
score allant de 3 à 1 définissant la qualité de la segmentation comparée à la réalité clinique est
défini dans le tableau 3.1.
Score = 3 si 60% ≤ R ≤ 100% Bonne segmentation
Score = 2 si 20% ≤ R < 60% Segmentation moyenne
Score = 1 si ρR< 20% Segmentation ratée
Tab. 3.1 : Protocole d’évaluation de la segmentation.
Ces outils d’évaluation définis, les résultats obtenus dépendent essentiellement de
l’initialisation et de la recherche de la configuration optimale (ICM ou Recuit simulé).
Excepté pour quelques cas, l’initialisation ayant donné les meilleurs résultats aussi bien pour
le recuit simulé que pour l’ICM est la quantification équiprobable (INIT A). Les
segmentations obtenues par les deux approches restent assez proches avec un nombre
beaucoup plus élevé d’itérations pour le recuit simulé. Les scores obtenus selon le protocole
défini par le tableau 3.1 ont donné le graphe de la figure 3.4.

99
0,1
0,22
0,68
0,0%
20,0%
40,0%
60,0%
80,0%
100,0%
1 2 3
Fig. 3.4 : Résultats de la segmentation exprimés en pourcentage de mammographies étudiées
Dans 68 % des cas étudiés (34 mammographies sur 50) la segmentation a été satisfaisante (le
paramètre R est supérieur à 60%). Il s’agit essentiellement de seins glandulaires (G) ou denses
(D) dont la partie glandulaire forme une région compacte, séparée du muscle et qui se détache
nettement de la partie graisseuse (figure 3.5). Parmi les 32 % des mammographies qui restent
(16 cas), le score 2 (segmentation correspondant à 20% ≤ R < 60%) a été obtenu pour 11
images. La segmentation a donné des régions plus petites que celle délimitées par le médecin.
Les images traitées correspondent essentiellement à des configurations de seins présentant une
partie glandulaire parsemée de graisse et dont la structure fibreuse présente un contour
difficile à définir (figure 3.6). Les 5 cas restants ont été segmentés avec peu de succès
(segmentation correspondant R < 20%). Pour ces cas, les seins correspondants peuvent être
considérés comme entièrement graisseux (figure 3.7).
Score

100
(a) (b)
(c) (d)
Fig. 3.5 : Résultats de la segmentation : (a) mammographie à segmenter mdb041 ; (b) Segmentation effectuée
manuellement par le médecin ; (c) Segmentation obtenue avec l’initialisation INIT A et l’ICM (10 itérations); (d)
Segmentation obtenue en comparaison avec celle du médecin (R=0.77).

101
(a) (b)
(c) (d)
Fig. 3.6 : Résultats de la segmentation: (a) mammographie à segmenter mdb003 ; (b) Segmentation effectuée
manuellement par le médecin ; (c) Segmentation obtenue avec l’initialisation INIT A et SA (80 itérations); (d)
Segmentation obtenue en comparaison avec celle du médecin (R=0.58).

102
(a) (b)
(c) (d)
Fig. 3.7 : Résultats de la segmentation: (a) mammographie à segmenter mdb009 ; (b) Segmentation effectuée
manuellement par le médecin ; (c) Segmentation obtenue avec l’initialisation INIT A et SA (78 itérations); (d)
Segmentation obtenue en comparaison avec celle du médecin (R=0.185).

103
3.5 Segmentation des angiographies rétiniennes
3.5.1 Position du problème
Les maladies de la rétine et de ses vaisseaux sont malheureusement nombreuses. Celles ayant
fait l’objet d’une étude dans le cadre de l’aide au diagnostic assisté par ordinateur sont la
dégénérescence maculaire liée à l’âge (DMLA) et de la rétinopathie diabétique (RD).
♦ La dégénérescence maculaire liée à l’âge ( DMLA)
La rétine, pièce maîtresse de l’œil, est sujette à un certain nombre de pathologies
occasionnées notamment par le vieillissement des cellules la constituant. Un des aspects de
ce phénomène se traduit par l’apparition après la cinquantaine, d’un grand nombre de lésions
sous forme de petites taches sur les angiographies de la rétine. Ces lésions appelées drusens,
sont considérées comme des signes précurseurs de la dégénérescence maculaire liée à l’âge
(DMLA). Le nombre ainsi que la taille de ces drusens qui envahissent la rétine connaissent au
cours du temps une constante évolution, provoquant de graves hémorragies qui peuvent être à
l’origine d’une très forte baisse de la vision jusqu’à engendrer la cécité dans les cas les plus
extrêmes. Dans les pays industrialisés, la prévalence globale de la DMLA est de 8 % soit
plus de quatre millions de personnes en France [30-34].
♦ La rétinopathie diabétique
La rétinopathie diabétique concerne une population entre 20 et 64 ans en France et dans les
pays occidentaux. Elle est liée essentiellement au diabète . Elle représente avec la DMLA la
première cause de malvoyance et de cécité en Occident. Ces deux pathologies constituent à
elles seules, le premier budget de la Sécurité Sociale pour l’Ophtalmologie en France [34].
Dans sa phase initiale qui peut durer plusieurs années, elle est totalement asymptomatique et
ne peut être diagnostiquée que par un examen systématique du fond d'œil. La baisse visuelle
liée à l'œdème maculaire peut à la longue entraîner une cécité.
Les premiers signes précoces de la rétinopathie diabétique sont d’une part l’élargissement de
la taille de la zone avasculaire centrale (voir figure 8), et d’autre part, l’apparition de

104
déformations du réseau capillaire appelées microanévrismes. Lors d’une rétinopathie
diabétique, certains vaisseaux disparaissent autour de la zone avasculaire centrale, entraînant
une augmentation de sa superficie. Si les modifications du diamètre (de l’ordre de 300 µm sur
un sujet sain) de cette zone ne sont pas prises en compte, la vue du patient diabétique peut être
compromise. La mesure des modifications de la taille de la zone avasculaire centrale est
importante pour apprécier de manière objective l’évolution de la maladie. A l’heure actuelle,
la reconnaissance des frontières de la ZAC se fait manuellement par les médecins.
L’observation de l’évolution de sa taille dans le temps est importante, dans la mesure où cet
élargissement touche des régions où se concentrent un très grand nombre de cellules de la
vision. La détection précoce de ces anomalies permet de suivre de près leur évolution dans le
temps, et d’aider dans certains cas le médecin à anticiper son traitement et améliorer son
diagnostic. L’amélioration du suivi de cette pathologie de la rétine comme celui d’autres, peut
être réalisée par l’utilisation de l’imagerie numérique et en particulier l’angiographie
rétinienne numérique.
♦ L’angiographie rétinienne numérique
L’exploration de la rétine peut se faire aujourd’hui par toute une série de techniques
d’imagerie parmi lesquelles on peut citer: l’imagerie par résonance magnétique (IRM), le
scanner, l’échographie et l’ophtalmoscope à balayage laser (SLO). Pour ce qui est de
l’examen de la structure vasculaire, on utilise, en France, l’angiographie numérique. Le
principe de cette technique consiste à réaliser des images numériques de la rétine à la place
des photographies classiques. Afin d’explorer tout ou partie du fond de l’œil d’un patient, le
médecin ophtalmologue utilise un système optique. En général c’est un rétinographe dit
angiographe conventionnel ou bien un ophtalmoscope laser à balayage dit SLO. Cette série
d’images porte le nom d’angiographies. Les régions observées lors de la réalisation d’une
angiographie sont (figure 3.8) :
. La papille, une région plutôt claire et circulaire et contenant l’émergence du nerf optique.
. Le réseau vasculaire.
. Les veines qui partent de la région maculaire et des régions voisines pour converger vers la
papille, et les artères qui, elles, partent de la papille et vascularisent toute la rétine.
. La région maculaire contenant la zone avasculaire centrale (ZAC).

105
Fig. 3.8 : Angiographie contenant les principales régions de la rétine.
Cliché du Service d’Ophtalmologie Hôpital de la TIMONE, Marseille.
La procédure de l’examen complet de la rétine se réalise en deux étapes qui consistent à
prendre respectivement des images avant et après injection par voie intraveineuse d’un
produit colorant. Il s’agit généralement de la fluorescéine (visible en infra-rouge) ou du vert
d’indocyanine (visible sous rayons ultaviolets). Les premières images (avant injection du
produit colorant) réalisées sous lumière rouge, bleue ou verte sont utilisées pour reconnaître
certaines structures anatomiques de la rétine, tandis que les secondes (après l’introduction du
produit colorant) sont réalisées pour observer les zones plus petites du fond de la rétine. Le
produit injecté dit de contraste, (dont les molécules sont excités en présence d’une source de
lumière) permet, comme son nom l’indique, d’accroître le contraste des angiographies
réalisées pour mettre en évidence des anomalies profondes et peu visibles.
zac
Papille
Arbre vasculaire
Veines
Artères

106
3.5.2 Segmentation de la zone avasculaire centrale
3.5.2.1 Théorie statistique du signal
Le problème de la détection de la ZAC revient à décider l'appartenance de tout pixel de
l’image à la ZAC ou bien au fond. Il faudra donc choisir entre 1H hypothèse associée à la
présence du signal recherché (ZAC), et 0H celle associée à la présence du fond (bruit).
Pour une image angiographique x de N pixels, sachant que x(n) représente le niveau de gris
associé au pixel n ∈1, 2, …., N, la formulation du problème de la détection de la ZAC dans
le cas du test d'hypothèse binaire, a été donné en début de chapitre [1, 35]:
( ) ( )( ) ( ) ( )
+=+===
nsn wsignal fondnx:H
n wfondnx:H
1
0 (3.20)
Les deux grandeurs ( )nw et ( )ns représentent respectivement le bruit qui dégrade l'image
angiographique et le signal recherché (ZAC).
Le but est de déterminer le modèle statistique des données observées en utilisant soit le test du
rapport de la vraisemblance maximale (3.11) basé sur la méthode de Neyman–Pearson, soit le
test de comparaison des deux probabilités (3.7), fondé sur le test Bayesien.
♦ Images simulées
Pour tester la méthode développée, nous avons travaillé dans un premier temps sur des images
artificielles. A cet effet nous avons généré une "image signal s" contenant un objet considéré
comme la cible à détecter et deux autres images: "image bruit w" (figure 3.9(b)) et "image
signal+bruit x" (figure 3.9(c)).

107
(a) (b) (c)
Fig. 3.9 : Exemple d’image simulée.(a) : image s ; (b) image w ; (c) image x
Le bruit introduit sur nos images est de type blanc gaussien ergodique non centré et additif, de
paramètres wµ (moyenne) et wσ (écart-type).
Un premier seuil S1 situé entre la valeur minimum de l’image w et la valeur maximum de
l’image x permet de calculer la probabilité de présence 1P du signal s et la probabilité de
présence 0P du bruit w, à partir des fonctions histogrammes assimilées aux densités de
probabilité, et de générer ainsi l'image du rapport de vraisemblance (TRV) résultante 1P / 0P .
Un second seuil 2S est utilisé pour binariser l’image 1P / 0P et séparer ainsi les pixels
appartenant à la ZAC, de ceux appartenant au fond. Les images obtenues par cette méthode
sont alors comparées point par point à l'image s de départ afin de déterminer parmi les sN
pixels de l’objet le nombre dN de pixels correctement détectés et faN nombre de pixels
détectés à tort parmi les sN-N restants.
Pour évaluer la pertinence de la méthode employée dans la séparation entre l’objet et le fond,
nous calculons les probabilités de détection correcte dP et de fausse alarme faP à partir de dN , faN et du nombre total N des pixels de l’image [1]. s
fafa
s
dd N- N
NPet
N
NP == (3.21)
Enfin, la courbe caractéristique de la détection ROC (Receiver Operating Characteristic) est
tracée pour différents valeurs du couple (S1, S2). La procédure comprenant le déroulement des
différentes étapes du processus de traitement de l’image, est récapitulée par un schéma
synoptique donné par la figure 3.10.

108
Calcul de P1 à partir de x
Calcul de P0 à partir de w
Génération de l’image signal s
Génération de deux images : « Bruit = w » et « Bruit (w) + Signal (s) = x »
Seuillage de w et de x avec S1= µx+ kσx (1≤ k ≤ 2)
Calcul du rapport P1/ P0
Génération de l’image TRV
Seuillage avec S2 = µTRV + k’ σTRV (1≤ k’ ≤ 2)
Résultat (image binaire)
Comparaison avec s
Calcul de Pd et Pfa
Fig. 3.10 : Schéma synoptique de la méthodologie proposée
Courbe ROC

109
♦Résultats expérimentaux
Plusieurs images simulées par ordinateur avec différents niveaux de contraste entre la cible et
le fond et différents niveaux du rapport signal/bruit (SNR) de l'image x ont été étudiés. Les courbes ROC pour différentes valeurs de 1S et de S2 ont été tracées. Pour cela nous avons
opéré comme suit :
♦ Génération d’une vingtaine d’images ix (i = 1, 2, …, 20) correspondant à une valeur
donnée de l’écart type iw)(σ du bruit w ou ce qui revient au même pour une valeur donnée
de ix)(σ .
♦ Pour chaque image ix on détermine dP et faP en faisant varier le seuil 1S selon la relation
ii xxi1 σk µ )(S += ; k ∈[0;2], puis le seuil 2S selon ii (TRV)(TRV)i2 σk'µ )(S += k'∈ [0 ;2].
Les couples de paramètres )σ,(µii xx et )σ,(µ
ii (TRV)(TRV) correspondent respectivement à la
moyenne statistique et l’écart-type de l’image ix et de celle résultant du test du rapport de
vraisemblance maximale (TRV)i.

110
Pour chaque image xi et chaque seuil S1 la courbe ROC est obtenue en portant les valeurs de
dP en fonction de faP pour chacune des valeurs du seuil S2. Le seuil S1 qui a permet une
meilleure détection de notre objet s’est avéré de l’ordre de xx σµ + . Les courbes ROC
(figure 3.11) exprimant la bonne détection en fonction de la fausse alarme pour des valeurs
différentes de 1S ont confirmé l’idée d’un possible compromis entre une maximisation de dP
et un maintien à un niveau toléré de faP . En effet, le calcul de l’aire sous cette courbe ROC,
notée Az a permis de fixer la valeur de 1S conduisant au meilleur compromis entre dP et faP .
On observe sur ces courbes, que les résultats sont nettement meilleurs lorsque 1S est
légèrement supérieur (d’un pas de 1 xσ ) à xµ où on arrive à détecter plus de 90 % des pixels
de l'objet. Cette grandeur nommée Az varie donc en fonction de 1S . Pour S1< xµ , la
probabilité dP décroît de façon considérable et les fausses alarmes exprimées par faP
s'accentuent d’une manière très prononcée.
Fig. 3.11 : Courbe caractéristique des performances de détection exprimées par la probabilité de détection
correcte Pd en fonction de la fausse alarme Pfa, pour trois valeurs différentes du seuil S1. L’écart-type σx associé
à l’image vaut 30. Az=0.75, 0.88, 0.95 pour S1=µx – σx, µx , µx + σx respectivement.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Pfa
Pd
S1 = µx – σx
S1 = µx * S1 = µx + σx

111
En résumé, on constate à partir des courbes ROC (figure 11) que le meilleur couple de seuil
( 1S , 2S ) est donné par [35] :
xx1 σµS +≈ (3.22)
2k'1avecσk' µS TRVTRV2 ≤≤+≈ (3.23)
Un exemple de résultat obtenu est illustré figure 3.12.
(a) (b) (c)
Fig. 3.12 : Résultats de l’application de la méthode statistique développée sur une image simulée entachée par
un bruit gaussien additif avec µx =100 et σx=30.
a) images x = w + s; b) images TRV ; c) résultat
♦♦♦♦Images réelles
Pour appliquer la même méthodologie sur les images réelles, une première étape consistant à
estimer le bruit contenu dans des images rétiniennes, est effectuée. Cette estimation est
réalisée grâce à l'application d'une transformation du type "décomposition en valeurs
singulières" (Singular Value Décomposition (SVD)). Pour limiter le domaine de recherche de
la zone avasculaire centrale et ne pas opérer complètement "en aveugle", nous procédons à la
détermination d'une région d'intérêt en utilisant les informations a priori sur la localisation de
la ZAC, fournies par les ophtalmologues. Nous avons inversé la dynamique de l’image
rétinienne originale de manière à faire apparaître la ZAC comme un objet brillant sur un fond
sombre et pouvoir ainsi appliquer la même procédure de segmentation des scènes simulées sur
des angiographies réelles.
Dans cette approche il est possible de représenter une image N][Mx × (en supposant que MN≤ )
dans un sous-espace de dimension r où r est le rang de la matrice x . Les deux matrices tx x

112
et xx t sont symétriques, non nulles et possèdent les valeurs propres iλ . Puisque MN≤ , il
y a au plus Nr ≤ valeurs propres non nulles. Il est donc possible de trouver r vecteurs propres
iv (avec M composantes pour chaque vecteur) de tx x et autant de vecteurs propres iu
(avec N composantes) pour xx t , ce qui peut se traduire par les deux relations suivantes [36,
37] :
r......,,1iiit ,vλvx x i == (3.24)
r..... ,,1iiit ,uλux x i == (3.25)
D’où on peut considérer l’image angiographique x comme un vecteur d'observations pouvant
être décrit par le modèle théorique suivant :
tii
r
1ii
t .vu.λ.v.ux ∑=ϕ==
(3.26)
Les deux matrices orthogonales u et v possèdent respectivement rM× et rN× éléments et
leurs colonnes sont les vecteurs propres iu et iv des matrices xx t et tx x et. Quant à ϕ , elle
représente la matrice diagonale rr× dont les éléments diagonaux sont égaux à iλ (i=1,…r)
ordonnés par ordre décroissant, soit :
=ϕ
r
1
λ0
-
-
-
0λ
(3.27)
Par la méthode SVD on détermine le rang r de la matrice tx x (r ≤ N) qui représente le
nombre de valeurs propres non nulles:
0λ...λλλ..λ N2r1rr1 ====≥≥≥ ++ (3.28)

113
Pour notre modèle de bruit aléatoire additif, la matrice x correspondant à l’observation de la
scène réelle, résulte de l’addition des deux grandeurs s’ et w associées respectivement à
l’estimation du signal s et de celle du bruit w, que l’on peut approcher par [35] :
∑≈′=
k
1
tiii
iv.u.λs (3.29)
∑≈+=
r
1k
tiii
iv.u.λw (3.30)
La meilleure approximation de x est conditionnée par la valeur de k. L’image rétinienne x est
considérée comme la somme d’une image représentant une estimation de la ZAC (s’) et une
autre représentant le fond assimilé à l’estimé w du bruit (w). La méthode statistique décrite
précédemment est alors appliquée sur une image rétinienne de la même façon que pour les
images simulées. Pour chaque pixel de x, le rapport de la vraisemblance P1/P0 est calculé. Ce
rapport est comparé à un seuil global automatique déterminé à partir des statistiques de
l'image x permettant ainsi de déterminer l’image binaire représentant la ZAC. Les résultats
obtenus sur les images réelles sont exposés ultérieurement.
3.5.2.2 Approche Markovienne
La localisation de la ZAC peut être formulée comme la recherche du champ des étiquettes X
de l’image angiographique Y dégradée par le bruit W. L’image Y est modélisée par une
superposition de deux régions principales : la cible ZAC (dont la forme est plus ou moins
elliptique) et le fond de l’image, nommées respectivement C et C . La méthodologie proposée
recherche le contour de la ZAC en exploitant la rupture statistique entre les pixels de la ZAC
et ceux du fond. Afin d’approcher le problème par les champs de Markov, on considère qu’il
y a une corrélation locale entre les sites. Notre image X ou Y sera définie donc par un
ensemble points avec la propriété de dépendance locale entre sites, limitée au 4-voisinage [4,
38, 39]. Chaque site est repéré par ses coordonnées polaires (ρ,θ) conformément au schéma
de la figure 3.13 où le centre O (i0, j0) est supposé connu [40].

114
Afin de déterminer si un site s(ρ, θ) choisi aléatoirement sur X appartient à C ou à C , on se
donne M orientations θ0, θ1,…., θM-1. Le ’’vrai’’ contour de la ZAC est paramétré par le rayon
kr pour chaque orientation θk. En supposant que le bruit W est du type gaussien centré additif,
avec des paramètres statistiques différents pour C et C , notre modèle s’écrit alors [40] :
+
+=+=
wµ
wµW)r,θkX(ρ)r,θkY(ρ
k
kk,k, k
CkC
CC
kk (3.31)
ρk désigne le rayon courant dans la direction θk. Les deux grandeurs kC
µ et
kCµ correspondent respectivement à l’intensité moyenne de la cible C et du fond C selon la
direction θk, tandis quekk CC et ww sont définis par :
>
≤
) (rkρ si ), σ0 ~ N(w
)(c rkρsi), σ0~ N( w
fond
ible
k2
kCC
k2
kCC
k
k (3.32)
s(i, j)
O (i0, j0) (
ρ
θk C
Fig. 3.13: Représentation polaire du problème sur une image
C
.

115
En utilisant la formule de Bayes, la segmentation de la ZAC revient à chercher l’estimation
x de x qui maximise la fonction de probabilité a posteriori P(X=x /Y=y) (critère MAP):
] x)/XyP(Yx)[P(Xxmaxarg ] y)/YxP(X[
xmaxargx ======= (3.33)
Il s’agit de déterminer pour tout θk, le rayon optimal kr qui permet une meilleure estimation
des deux couples de paramètres statistiques )σ, µ( 2CC kk
et )σ, µ( 2CC kk
correspondant
respectivement aux deux régions C et C .
♦ Expression de la fonction de vraisemblance
La résolution de l’équation (3.33) impose en premier lieu que l’on puisse exprimer chacun des
termes la composant. Pour cela, nous allons faire un certain nombre d’hypothèses :
- Le centre de la ZAC est supposé connu.
- Pour chaque direction θk nous allons considérer une longueur de d pixels.
- L’indépendance des sites s pour le calcul des probabilités conditionnelles.
La représentation polaire pour la recherche du contour de la ZAC nous amène à effectuer un
changement de notations pour la suite de ce chapitre. Notons par )j(yk le terme correspond à
l’élément j (1 ≤ j ≤ d) pris dans la direction θk et Yk = [yk(1), yk(2),…….yk(d)] le vecteur
contenant les d pixels dans cette même direction. La fonction de vraisemblance P(Y/X)
s’exprime alors pour une longueur de d pixels dans la direction θk et pour un rayon de la ZAC
supposé égal à ρk, par la fonction f définie, comme suit [39] :
−∑−+
−∑−=
+==
2)µj
(j )k (yσ
1
21 2)µ
j(j )k (y
σ
1
21 expβ),ρ,µ/µkf(Y
kC
d
1kρ2
kCkC
kρ
12
kCkCC kk
(3.34)
avec
( ) ( ) kd-ρπ σ2
1
kρπσ2
1β
2
kC2
kC
=

116
♦ Expression de la probabilité a priori
La propriété de Markov nous permet d’évaluer P(X=x) à partir du modèle théorique de Gibbs.
Dans le cas qui nous intéresse, le contour recherché peut être vu comme un champ aléatoire
de Markov monodimensionnel. Nous considérons alors un voisinage d’ordre 2 qui ne fait
intervenir que deux types de cliques : les cliques ne comportant qu’un point c1 et celles
comportant deux points consécutifs c2. Ce voisinage restreint a été adopté pour permettre des
calculs plus rapides. Seules les cliques c2 seront prises en compte. La cible C ayant une forme
plutôt elliptique, pour tout point du contour appartenant à l’axe θk, nous aurons deux
potentiels de clique à calculer, en l’occurrence les cliques se trouvant en amont (θk-1) et en
aval (θk+1) de θk. Ces deux potentiels sont donnés ci-dessous [40] :
−=
−=
++2
1kk2
21k-k
2
)r(rδcV
)r(rδcV
1k
1k- (3.35)
où δ est un facteur de régularisation et rk, rk+1 et rk-1 sont les rayons supposés de la ZAC
correspondant respectivement aux directions θk, θk-1 et θk+1.
La nouvelle expression de la probabilité a priori P(X=x) que nous notons g(r), a pour
expression :
[ ] M01M -
1M-
0k
21kk
21k-k
2 r r et rr avec )r(ρ)r(ρ-δexpZ
1g(r)
1- ==
∑ −+−==
+ (3.36)
La valeur du facteur de régularisation δ est comprise entre 0 et 1. Il permet comme nous le
verrons plus loin de contrôler la convergence de l’algorithme de recherche du contour
optimal.
La fonction P(X/Y) notée aussi f(r/Y) est alors donnée par l’expression :

117
−++−+
∑+=
−∑+=
++
∑=
−∑=
+−=
2 ) 1-krk(ρ2 )1krk(ρ
2 δ 2
)d
1kρj) (j y
kCµ2
d
1kρj) (j 2ky (2
kCµd
2kC
σ
1kρ
1j) (j y
kCµ 2
kρ
1j) (j 2ky 2
kC σ
1α
21 expβf(r/Y)
kk
(3.37)
avec :
=
−=
− kρd
kCkρ
kCd
2
kC
2
kC2
kC
2
kCk
)(σ )(σ) 2π(
1 β
σ
µ
σ
µ ρα
Le rayon optimal kr de la ZAC, pour une direction kθ , est obtenu en calculant le maximum
de la fonction donnée par l’équation (3.37).
♦ Estimation Bayésienne des paramètres statistiques
Le modèle établi dans le paragraphe précédent suppose que l’on connaisse les couples de
paramètres )σ, µ( 2CC kk
et )σ, µ( 2CC kk
. L’utilisation de l’équation (3.37) en particulier nécessite
une estimation de ces paramètres. Pour ce faire on utilise la méthode Bayesienne classique
qui, estime le paramètre recherché par la valeur pour laquelle la dérivée de la probabilité a
posteriori, par rapport à ce paramètre, s’annule.
♦ Détermination pratique des rayons kr
Pour rechercher le contour optimal au sens du maximum a posteriori, ou, ce qui revient au
même, pour résoudre l’équation (3.37), l’algorithme ICM (Iterated Condional Modes) est
utilisé. Cet algorithme se déroule de la manière suivante :
- Etape I : Initialisation des rayons rk, k∈ 0, 1, 2, ……. , M-1 et rk ∈ 1, 2, ……. , d
- Etape II : L’estimation initiale des couples )σ, µ( 2CC kk
et )σ, µ( 2CC kk
est effectuée pour
chaque direction θk,

118
- Etape III : Pour chaque valeur de kθ , l’évaluation de l’expression donnée par l’équation 3.37
est effectuée pour tout ρk∈1, 2, ……. d-1. Le nouveau rayon noté kr correspond à la valeur
de ρk pour laquelle la relation (3.37) atteint son maximum. Ce nouveau rayon servira à l’étape
II pour l’estimation des paramètres.
- Etape IV : Si les rayons se stabilisent entre deux itérations, l’algorithme s’arrête, sinon on
repart à l’étape II.
♦ Résultats sur des images artificielles
Pour tester cette méthode, nous l’avons appliquée dans un premier temps sur des images
simulées. A cet effet, une image artificielle de taille 512 × 512 pixels contenant un disque de
30 pixels de rayon représentant la cible C a été générée. Plusieurs niveaux (Rapport Signal sur
Bruit) de bruit blanc gaussien W ont été simulés. Les nombreux tests effectués ont permis de
retrouver le contour initial de la cible. Il s'est avéré qu’un compromis entre l’initialisation et le
facteur de régularisation δ était nécessaire pour assurer la convergence de l’algorithme. Le
nombre d’itérations est resté relativement bas (il a varié entre 5 et 8). La figure 3.14 donne un
exemple des résultats obtenus pour une initialisation avec un rayon de 15 pixels et 16
orientations (M=16). Les points du contour obtenu ont été reliés par des segments de droite,
formant ainsi un polygone matérialisant l’objet recherché. Nous pouvons constater sur ces
images que hormis une ou deux directions, les rayons optimaux estimés permettent de
retrouver les contours de l’objet à segmenter. Pour une même initialisation, la valeur attribuée
au coefficient de normalisation δ peut faire diverger l’algorithme lorsque ce paramètre se
rapproche de sa valeur maximale 1. Il n’a pas été possible de trouver une loi permettant de
définir l’intervalle de convergence des paramètres de segmentation que sont le rayon
d’initialisation et le facteur de régularisation. Nous avons observé que pour une valeur
maximale attribuée à δ, l’algorithme diverge au moins pour une direction sur deux et ce,
quelle que soit la réalisation du bruit . En revanche, l’algorithme converge pour les trois
réalisations de bruit et sur l’ensemble des directions θk lorsque δ reste inférieur à 1. Cela étant,
on peut atténuer l’influence de ce facteur lorsque il est à son maximum, en accordant des
valeurs plus faibles au rayons de l’initialisation. Ces résultats illustrent l’efficacité de
l’approche Markovienne qui constitue le substrat de la méthode appliquée de manière itérative
grâce à l’ICM que nous avons proposé [40] pour segmenter le contour de notre objet.

119
(a) (b)
(c) (d) Fig. 3.14: Résultats de segmentation (c) et (d) sur des images simulées dégradées par un bruit aléatoire w dont
l’écart type σw vaut respectivement 25 (a), 35 (b) et un coefficient δ égal à 0.6.
3.5.2.3 Résultats sur les images réelles
Les algorithmes présentés dans les paragraphes précédents ont été appliqués sur une dizaine
d’angiographies rétiniennes numériques. Dans cette partie, nous allons présenter les
principaux résultats obtenus, par l’application des deux méthodologies proposées, sur ces
angiographies rétiniennes réelles. Ces images médicales, réalisées sur des patients différents,
nous ont été fournies par le service d’Ophtalmologie de l’Hôpital de la Timone à Marseille,
avec qui nous collaborons sur les aspects aide au diagnostic assisté par ordinateur depuis des
années. Pour évaluer la pertinence des méthodes développées, nous avons demandé à un
ophtalmologue expert de délimiter manuellement la ZAC sur les images étudiées à l’aide d’un
logiciel de traitement d’image IDL/ENVI. Pour ne pas avoir à travailler sur toute l’image
rétinienne et réduire en conséquence le temps de calcul des algorithmes, nous avons extrait de
chaque angiographie une sous image de 256×256 pixels contenant la ZAC.
♦ Test du rapport de vraisemblance
Un récapitulatif de la procédure permettant la segmentation de la ZAC par la première
méthode statistique est donné par la figure 3.15.

120
La figure 3.16 donne un aperçu de la segmentation obtenue sur une image sélectionnée parmi
l’ensemble des angiographies étudiées. En règle générale, la segmentation obtenue est proche
de celle effectuée par le médecin et ce pratiquement pour l’ensemble des images étudiées.
Image réelle
Image réelle dont la dynamique est inversée : x
Image x prétraitée : x’= x - w Image fond : bruit = w
Calcul de 1P Calcul de 0P
Image TRV = 1P / 0P
Résultat : image binaire
Application de la SVD
Seuillage/ S2
Fig. 3.15 : Schéma synoptique de la procédure permettant la détection de la ZAC
Seuillage/ S1

121
(a)
(b) (c)
(d) (e)
(f) (g)
Fig. 3.16 : Etapes du traitement menant à la segmentation de la ZAC : a ) et b ) image extraite des
angiographies. Le contour de la ZAC est tracé par le médecin pour a ; c ) Image b dont le contraste a été
inversé ; d ) Image fond ( w ) obtenues par SVD. e ) Images c prétraitées par SVD pour un rang k=12 (e = c - d).
f) Image TRV. g ) Image résultat.
Les différents tests effectués, ont permis de constater que le choix du rang k (voir § 3.5.2.1
dans la partie relative aux images réelles) de la matrice correspondant à chaque image, ainsi
que celui du couple de seuils (S1, S2), sont des paramètres déterminants pour la détection de la
ZAC par cette méthode issue de la théorie statistique du signal. Le traitement des images (d)
et (e) (en utilisant S1) ainsi que celui de (f) (en utilisant S2), s’est effectué en prenant en
considération les relations (3.22) et (3.23).
Afin d’évaluer la pertinence de cette méthode de segmentation, nous avons comparé les
résultats obtenus par traitement numérique à ceux données par les médecins. A cet effet,

122
l’indice de qualité R, qui a servi pour l’évaluation de la segmentation des mammographies, et
dont l’expression est rappelée ci-dessous, est utilisé.
manuseg
manuseg
AA
AAR
∪
∩= (3.38)
Amanu désigne l’ensemble des pixels contenus dans la ZAC entourée par le médecin et Aseg
désigne l’ensemble des points à l’intérieur de la ZAC obtenue par la méthode de
segmentation.
Les résultats obtenus pour 6 images ( notées image i, i=1,..6) sont résumés dans le tableau 3.2.
Rmax désigne le maximum obtenu pour l’indice de qualité R.
Indice de qualité
Rmax
Image 1 0.70
Image 2 0.56
Image 3 0.40
Image 4 0.41
Image 5 0.76
Image 6 0.50
Tab. 3.2 : Récapitulatif de l’indice de qualité R obtenu sur les six images étudiées
Si l’on estime qu’une très bonne segmentation doit donner un indice de qualité supérieur à
0.8, les résultats obtenus (0.6<R<0.8) peuvent être qualifiés de bonne segmentation pour deux
cas (images 1, 5). Les résultats pour les quatre autres images (0.4<R<0.6) peuvent être
qualifiés de segmentation moyenne.
♦ Champs de Markov
La figure 3.17 montre les résultats obtenus sur 3 images. Sur cette figure, les points du
contour trouvés sont interpolés par une courbe de type spline cubique. La valeur que l’on
attribue à δ (0 < δ≤ 1) doit tenir compte des rayons d’initialisation pour que la méthode
converge.

123
Comme dans le cas des images simulées, le nombre d’itérations pour les images rétiniennes
testées, est resté faible. Il est de l’ordre de 10 à 12 itérations. Il s’agit donc, d’une méthode
peu gourmande en temps de calcul.
(a1) (b1) (c1)
(a2) (b2) (c2)
(a3) (b3) (c3) Fig. 3.17 Résultats obtenus sur des angiographies rétiniennes.
(ai): images originales; (bi): Contour de la ZAC interpolé par des splines;
(ci): segmentation manuelle effectuée par le médecin.
La taille de la ZAC délimitée par le médecin est resté plus petite que le résultat de la
segmentation. Il s’est avéré également grâce aux nombreux tests effectués, que la région
segmentée est plus étendue lorsque des valeurs relativement grandes sont attribuées au
coefficient de régularisation δ. La situation s’aggrave davantage avec des rayons initiaux
importants par rapport à la taille de la ZAC. Ceci confirme la sensibilité de l’algorithme pour
certaines valeurs de δ, capables de le faire diverger. En adoptant le critère R utilisé dans le cas
de la première méthode de segmentation, la comparaison des résultats de l’approche
Markovienne avec ceux obtenus par le médecin a donné le tableau 3.3 suivant :

124
Image Image 1 (a2)
Image 2
(a1)
Image 3
(a3)
Image 4 Image 5 Image 6
Rmax 0.78 0.70 0.66 0.44 0.58 0.64
Tab. 3.3 : Récapitulatif de l’indice de qualité R pour les images étudiées. La 2ème ligne représente le maximum
de R, noté Rmax obtenue pour chaque image
Comme pour le cas des résultats de la première méthode, et en se référant au protocole du
tableau 3.1, on peut considérer qu’une bonne segmentation a été obtenue (0.6≤R≤1) pour 5
des images testées. Le résultat pour la dernière image (0.4<R<0.6) peut être qualifié de
segmentation moyenne.
En résumé, la seconde méthode semble donner des résultats très proches de ceux déterminés
par le médecin. Les performances de la segmentation par l’approche Markovienne, évaluées
par le paramètre de qualité R (sur quelques images), lui confèrent un avantage par rapport à la
méthode basée sur la théorie de la détection.
3.5.3 Segmentation de l’arbre vasculaire rétinien
Les vaisseaux sanguins sont des structures qu’il est important de détecter et caractériser dans
le cadre du diagnostic assisté par ordinateur et du suivi de certaines maladies. L’examen de
l’arbre vasculaire rétinien au même titre que celui de la zone avasculaire centrale permet de
révéler des pathologies de la rétine. Dans le cas de la première structure (réseau vasculaire), la
position et la variation du diamètre de l’arbre vasculaire ainsi que son environnement local
sont autant de paramètres qu’il faut examiner.
De nombreux travaux ont été consacrés à la segmentation de vaisseaux sanguins dans des
images médicales [41-62]. Les techniques utilisées pour l’extraction de l’arbre vasculaire sur
des angiographies rétiniennes peuvent être classées en trois catégories [46]: les méthodes
utilisant la corrélation entre un modèle de profil du vaisseau et l’image [47-54], celles utilisant
des approches de segmentation ’’régions’’ suivie d’une classification et les méthodes de
tracking qui consistent à suivre le vaisseau en se servant d’une information locale [55-58].
Enfin certaines méthodes combinent deux des approches décrites ci dessus [59-62]
Dans ce qui suit, sera présentée une méthode de type tracking basée sur une segmentation
Bayesienne associée au critère du Maximum a posteriori pour l’estimation des contours des
vaisseaux de la rétine.

125
3.5.3.1 Description de la méthode
♦Comme dans tout algorithme itératif, la méthode décrite dans la suite comprend une phase
d'initialisation, une phase itérative et une condition d'arrêt.
A chaque itération, l’algorithme estime la position du centre ainsi que celle de deux points du
contour du vaisseau. Ce procédé est renouvelé jusqu’à ce que la fin du vaisseau soit atteinte
ou qu’une bifurcation apparaisse (Dans ce cas la méthode est conçue pour continuer à détecter
les deux nouveaux vaisseaux au départ de la bifurcation).
Nous ne traiterons dans cette description que la cas d’un vaisseau simple. La détection puis la
prise en compte d’une bifurcation n’est qu’une extrapolation de la méthode.
A l’itération k, un demi-cercle Ck centré en Ok, de rayon Rk et perpendiculaire à la direction
k1k OO − ’’scrute’’ le vaisseau (figure 3.18). Les deux points frontières qui sont déterminés
par la méthode sont désignés par kU et kV . Le centre local du vaisseau, nommé O’k, est alors
défini comme le point milieu du segment [ kU , kV ]. Le nouveau centre du demi-cercle à
l’itération k+1 est noté Ok+1 et il se trouve sur le segment [Ok O’k], qui par la même occasion
désigne la nouvelle direction locale du vaisseau.
Fig. 3.18: Diagramme schématique de progression de l’algorithme
Le rayon du demi-cercle Ck+1 ainsi que la position de Ok+1 sont donnés par les formules :

126
Rk+1 = 1.5 φk
φk= kU kV (3.39)
Ok Ok+1 = Rk – Rk+1 + e
où e est un paramètre fixé par l’opérateur. Il désigne l’écart séparant deux demi-cercles
consécutifs. La première relation permet de s’assurer que le cercle de rayon Rk à l’itération k
englobe bien le vaisseau et la seconde fixe un échantillonnage du déplacement du demi-cercle
suffisamment petit pour ne pas ’’rater’’ des changements de courbure.
♦ La détermination des points frontières kk V et U se base sur la rupture statistique entre les
niveaux de gris du fond et ceux du vaisseau sanguin. On appelle alors Yk le vecteur défini par
Yk = )k(
sy , s=1,2,...Nk, où Nk représente le nombre de points pris sur le demi-cercle Ck et
)k(sy désigne le niveau de gris du s
ème point pris sur ce demi-cercle Ck quand on le parcourt de
haut en bas. Une configuration ‘’i’’ notée χi est définie comme l’ensemble de deux points
notés ,i2,i1 sets parmi les Nk, correspondant à deux pixels supposés être les 2 points frontière
du vaisseau. Ainsi pour toute configuration χi, et pour tout point s du profil semi-circulaire, on
peut écrire :
s∈vaisseau si ,i2,i1 sss ≤≤
et
s∈fond si k,i2,i1 Ns ou sss1 ≤<<≤ .
Le vaisseau sanguin peut alors être vu comme la configuration qui maximise la probabilité
P(χi / Yk). La théorie de Bayes donne alors l’expression :
)P(Y
)) . P( |P( Y) = | YP(
k
iikki
χχχ (3.40)
La maximisation de cette probabilité se ramène à la recherche du maximum du produit
)) . P( | P( Y iik χχ
♦ En faisant l’hypothèse de l’indépendance des probabilités d’observation des pixels
appartenant au vaisseau et au fond, on peut écrire :

127
∏∏∏+
−
==χ
k
i,2
2
1
i,1 N
1ss
i,s
i,ss
1s
1ssik fond)P(y)vaisseauP(y)fondP(y)P(Y (3.41)
Les probabilités conditionnelles relatives au fond et au vaisseau sont supposées être des
Gaussiennes et les loi correspondantes sont alors données par :
)2f
fs
f
s
2v
vs
vs
σ2
)²m(y(exp
σπ2
1fond)P(y
)σ2
)²m(y(exp
σπ2
1 vaisseau)P(y
−−=
−−=
(3.42)
où mv, σv, mf, σf représentent respectivement la moyenne et l’écart-type du vaisseau et du
fond.
♦ L’algorithme utilise une approche type Markov en ce que sens que la connaissance des
itérations précédentes permet de choisir les meilleurs points frontières pour les itérations
suivantes. Comme les bords d'un vaisseau sanguin sont localement rectilignes, on choisira les
points frontières kU et kV qui sont le plus possible alignés avec les points frontières des
itérations précédentes. En pratique, avec les points frontières des 4 itérations précédentes on
estime les coefficients des droites des moindres carrés approximant localement les bords du
vaisseau. On note ∆1 et ∆2 les droites approximant respectivement les points 1kU − , 2kU − ,
3kU − 4kU − et les points 1kV − , 2kV − , 3kV − , 4kV − (figure 3.19).
On estime qu'une configuration est d'autant plus improbable que ses points frontières sont
éloignés des droites calculées précédemment et qui approximent les bords du vaisseau. En
utilisant la formulation de Gibbs la probabilité d'une configuration χi à l'itération k
s'écrit alors:
P(χi ) = 1/z exp(-λχi) (3.43)
L’énergie d’une configuration est donnée par :
2i,2
2i,1i dd)(U +=χ (3.44)
d1,i et d2,i représentent la distance entre un point frontière (s1,i ou s2,i ), supposé par la
configuration χi, à la droite des moindres carrés (∆1 ou ∆2). Le paramètre λ est un coefficient
pondérant l'énergie de régularisation.

128
Fig. 3.19 : Détermination de l’énergie d’une configuration
♦ La mise à jour des propriétés du vaisseau à chaque itération permet de connaître
précisément les bords du vaisseau. On peut alors estimer à chaque itération les paramètres du
bruit sur le fond et sur le vaisseau. Pour cela, on construit une zone dans le vaisseau et 2 zones
autour du vaisseau (figure 3.20). Sur ces zones on estime les paramètres mv, mf, σv et σf.
Fig. 3.20: Estimation de la moyenne et de la variance du fond et du vaisseau
♦ L'algorithme nécessite de connaître la modélisation du bruit (mv, mf, σv et σf) ainsi qu'un
point de départ, une direction et une idée du diamètre du vaisseau à la première itération.
Pendant cette phase on demande donc à l'utilisateur de sélectionner une zone sur le vaisseau,
une zone sur le fond, un point de départ, un point sur chaque bord ainsi que la direction du
vaisseau. L'algorithme s'arrête lorsque le diamètre du vaisseau est estimé à 1 pixel.
s1,i
s2,i
∆∆∆∆1
∆∆∆∆2
d1,i
d2,i
2kU − 1kU − kU
O’k-1 O’k
1kV −
kV
O’k-2
2kV −

129
3.5.3.2 Résultats et discussion
♦ Le test de cet algorithme a été effectué sur un arbre vasculaire simulé, tel que celui
apparaissant en figure 3.21. La manière dont le vaisseau se ’’détache’’ du fond est un facteur
important. On introduit pour ce faire le rapport contraste sur bruit, communément appelé CNR
(Contrast to Noise Ratio). Le CNR varie proportionnellement avec le contraste γ mais
inversement à l'écart type du bruit.
)σ (σ2
1γ
CNR
vf += (3.45)
Le contraste que nous avons choisi est égal au rapport de la différence de niveau de gris du
vaisseau et celui du fond sur le niveau de gris du fond, calculés sur l’image non bruitée. σv et
σf sont les écart-types des bruits Gaussiens ajoutés respectivement sur le vaisseau et le fond de
l’image non bruitée.
♦ Pour évaluer la méthode, le paramètre de qualité de la segmentation R, qui a servi aux
études précédentes, a été utilisé. Il est, rappelons le, défini comme suit :
détecté_arbresimulé_arbre
détecté_arbresimulé_arbreR
∪∩
= (3.46)
arbre_simulé est l’ensemble des pixels appartenant au vaisseau simulé dans l’image binaire
arbre_détecté est l’ensemble des pixels appartenant au vaisseau détecté : Les points de
frontière détectés sont reliés par des segments de droite formant ainsi un polygone dont les
points intérieurs forment l’ensemble arbre_détecté.
| | désigne le cardinal d’un ensemble.

130
(a)
(b)
(c)
Fig. 3.21 : Exemple d’arbre vasculaire simulé : (a) image binaire de l’arbre vasculaire non bruité ; (b) image
bruitée avec un CNR=2.67 ; (c) image bruitée avec un CNR=1.33
♦ Pour quantifier l'efficacité de cet algorithme, nous avons effectué une série de tests en
faisant varier le CNR et le paramètre λ (equation 3.43). Le paramètre de qualité R est d’autant
plus élevé que le CNR croît pour une même valeur de λ . Nous avons aussi constaté que pour
un CNR donné, R passe par un maximum lorsque λ varie. Cette valeur optimale de λ est
d’autant plus petite que le CNR décroît. Nous avons obtenu un paramètre de qualité maximum
de 0.9 pour des valeurs du CNR variant entre 3 et 5, alors que ce même paramètre chute à 0.5
pour un CNR de 1.33. A titre d’exemple la courbe de la figure 3.22 représente l’évolution du
paramètre R pour des valeurs de CNR variant de 1 à 10, en ayant fixé le coefficient λ à la
valeur 0.01.

131
Fig. 3.22 : Efficacité en fonction du CNR
La courbe ci-dessus montre que la segmentation est d’autant plus efficace (R > 0.80) pour des
valeurs de CNR comprises entre 2 et 10 alors que cette même efficacité varie linéairement
pour des valeurs de CNR entre 0.5 et 2 ( 0.05 <R <0.8]).
♦ Dans le cas d'un CNR supérieur à 2 l'algorithme est très efficace. Le nombre de faux
positifs comme celui de faux négatifs reste relativement faible, et les points frontières sont
bien localisés. Les erreurs sont essentiellement dues à la reconstruction de l’arbre vasculaire
et notamment au niveau des bifurcations. La figure 3.23 montre l'analyse d'une portion de
vaisseau avec deux valeurs de CNR 2.66 et 1.66.
(a) (b)
(c) (d)
Fig. 3.23 : Résultats de segmentation sur deux images simulées λ=0.01 (a) et (c) : images originales simulées avec un CNR = 2.66 et 1.66 respectivement ; (b) et (d)résultats de
reconstruction de l’arbre (R=0.81 pour(b) et R=0.76 pour (d))
Paramètre R

132
♦ L’influence du terme de régularisation λ sur la segmentation a été étudiée aussi. En théorie,
un λ trop fort favorise des vaisseaux trop rectilignes et ne suit plus le vaisseau. En revanche
un λ trop faible pénalise la régularisation, et n'accorde de l'importance qu'aux niveaux de gris.
La figure 3.24 montre l’évolution de la qualité de segmentation (paramètre R) pour un
CNR=1.33. Le gain en efficacité de segmentation peut atteindre 40% avec un bon choix de λ
(R= 0.4 pour des valeurs de λ faibles mais il atteint un maximum de 0.56 pour une valeur de λ
avoisinant 0.01).
Fig. 3.24 : Evolution de la qualité de segmentation en fonction du paramètre de régularisation. CNR=1.33
♦ L'algorithme a aussi été testé sur des images réelles, des vaisseaux plus compliqués comme
un vaisseau dont la courbure varie beaucoup ou un vaisseau dont le diamètre n'est pas
constant. On note de bons résultats dans tous les cas testés. Il est à noter que l'algorithme
marche bien sur les images réelles car elles ont un CNR estimé de l'ordre de 4. Cependant, il
arrive que le CNR soit localement très faible notamment dans des zones où il y a des taches
dont le niveau de gris est proche de celui du vaisseau. Le paramètre de régularisation noté λ
joue alors un rôle essentiel. La figure 3.25 donne un exemple de segmentation sur une
angiographie rétinienne.
Param
ètre R

133
Fig. 3.25 : Résultats de segmentation de l’arbre vasculaire sur une angiographie réelle
(a) angiographie ; (b) résultat du parcours de l’algorithme; (c) portion de l’arbre vasculaire reconstruite
3.6 Conclusion
Dans cette partie nous avons entamé un travail sur la segmentation statistique avec une
application à l’imagerie médicale. L’exploitation de la théorie statistique de la détection dans
le cas du test binaire a permis d’élaborer une première méthode basée sur le test du rapport de
vraisemblance. Cette technique repose sur le choix d’un couple de seuils permettant une
décision optimale. Elle s’est avérée être très sensible quant au choix de ces deux paramètres.
Un compromis a pu être trouvé grâce aux nombreux tests effectués pour maximiser une
probabilité détection tout en maintenant une probabilité de fausse alarme à un niveau bas.
L’adaptation de cette méthodologie aux angiographies rétiniennes nous a conduit à utiliser la
décomposition en valeurs singulières (SVD), pour laquelle le choix du nombre de valeurs
(a) (b)
(c)

134
propres prises en compte s’est avéré être déterminant pour la segmentation de la zone
avasculaire centrale.
Une seconde méthode statistique de segmentation utilisant l’approche Bayesienne a été
élaborée essentiellement pour la segmentation contour d’objets circulaires ou filiformes. Cette
approche exploite la rupture statistique qui intervient à la frontière des régions d’intérêt
médical en modélisant le contour développé de l’objet à segmenter sous la forme d’une chaine
de Markov monodimensionnelle. Nous avons ainsi entrepris la segmentation des régions
d’intérêt dans un sein, la localisation de la ZAC sur des angiographies rétiniennes et le suivi
de l’arbre vasculaire rétinien. Les résultas très encourageants obtenus permettent de penser
que les travaux développés constituent une bonne approche pour l’aide à la détection assisté
par ordinateur dans le cas de l’imagerie médicale.

135
Bibliographie
1. S. M. KAY, ″ Fundamentals of Statistical Signal Processing - Detection Theory ″ ,
Volume II, University of Rhode Island, (1998).
2. J. BESAG, ″ Spatial interaction and statistical analysis of lattice system ″, Acad. Roy. Stat.
Ser., B 36, pp. 721-741, (1974).
3. M. BERTHOD, Z. KATO, S. YU, J. ZARUBIA, ‚″ Bayesian image classification using
Markov random fields″, Image and Vision Computing, 14, pp. 285-295, (1996).
4. S. GEMAN, D. GEMAN, ″ Stochastic relaxation. Gibbs distribution and the Bayesian
restoration of images ″, IEEE Transactions on Pattern Analysis and Machine
Intelligence, 6, pp. 721-741, (1984).
5. J. BESAG, ″ On the statistical analysis of dirty pictures ″, J. Roy. Stat. Soc. Ser., B 48,
pp. 259-302, (1986).
6. R. O. DUDA, P. E. HART, D. G. STORK, ″ Pattern Classification and Scene Analysis″
John Wiley and Sons Incorp, (1993).
7. A. P. DEMPSTER, N. M. LAIRD, D. B. RUBIN, ″ Maximum likelihood from incomplete
data via the EM algorithm ″, J. Royal Statis. Soc. B, 39, 1-38, (1977).
8. K. DOI, M. L. GIGER, R. M. NISHIKAWA, R. A. SCHMIDT, ‘Proceedings of the 3rd
International Workshop on Digital Mammography’, Toronto, ONTARIO, CANADA
Elsevier, (1996).
9. N. KARSSEMEIJER, M. THIJSSEN, J. HENDRIKS, L. VANERNING, ‘Proceedings of
the 4th International Workshop on Digital Mammography’, Nijmegen, The
Netherlands, Kluwer Academic Publishers, (1998).
10. M. J. YAFFE, ‘Proceedings of the 5th International Workshop on Digital
Mammography’, Toronto, Canada, (Medical Physics Publishing, 2000).
11. H. O. PEITGEN, ‘Proceedings of the 6th International Workshop on Digital
Mammography’, Bremen, Germanys, Springer-Verlag , (2002).
12. J. N. WOLFE ″ Breast Parenchymal patterns and their changes with age ″, Radiology,
121, 545-552, (1976).
13. S. R. AYLWARD, B. H. HEMMINGER, E. D. PISANO, ″ Mixture modelling for digital
mammograms display and analysis ″ Proceedings of the 4th International Workshop
on Digital Mammography, Nijmegen, The Netherlands, 305-314, (1998).

136
14. R. J. FERRARI, R. M. RANGAYYAN, J. E. L. DESAUTELS, A. F. FRERE, ″
Segmentation of mammograms : identification of the skin-air boundary, pectoral muscle
and fibro-glandular disc ″ Proceedings of the 5th International Workshop on Digital
Mammography, Toronto, Canada, 573-579, (2000).
15. T. MATSUBARA, D. YAMAZAKI, H. HARA, T. IWASE, T. ENDO, ″ An automated
classification method for mammograms based on evaluation of fibroglandular breast
tissue density ″, Proceedings of the 5th International Workshop on Digital
Mammography, Toronto, Canada, 737-741, (2000).
16. C. ZHOU, H. P. CHAN, N. PETRICK, M. A. HELVIE, ″ Computerized image analysis:
Estimation of breast density on mammograms ″, Medical Physics, 287, 1056-1069,
(2001).
17. U. BICK, M. L. GIGER, R. A. SCHMIDT, R. M. NISHIKAWA, K. DOI, ‚″ Density
correction of peripherical breast tissue on digital mammograms ″, Radio Graphics, 16,
1403-1411, (1996).
18. J. W. BYNG, J. P. CRITTEN, M. J. YAFFE, ″ Thickness-equalization processing for
mammographic images ″ Radiology, 203, 546-568, (1997).
19. R. CHANDRASEKHAR, Y. ATTIKIOUZEL, ″ A simple method for automatically
locating the nipple on mammograms ″, IEEE Transactions on Medical Imaging, 16,
279-282, (1997).
20. F. F. YIN, M. L. GIGER, K. DOI, C. J. VYBORNY, R. A. SCHMIDT, ″ Computerized
detection of masses in digital mammograms : alignment of breast images and its effect on
bilateral-substraction technique ″, Medical Physics, 21, 445-452, (1994).
21. P. K. SAHA, J. K. UPUDA, E. F. CONANT, D. P. CHAKRABORTY, D. SULLIVAN, ″
Breast tissue density quantification via digitized mammograms ″, IEEE Transactions on
Medical Imaging, 30, 792-803, (2001).
22. J. W. BYNG, N. F. BOYD, E. FISHELL, R. A. JONG, M. J. YAFFE, ″ The quantitative
analysis of mammographic densities ″ Phys. Med. Biol., 39, 1629-1638, (1994).
23. J. W. BYNG, N. F. BOYD, E. FISHELL, R. A. JONG, M. J. YAFFE, ″ Automated
analysis of mammoghraphic densities ″, Phys. Med. Biol., 41, 909-923, (1996).
24. P. G. TAHOCES, J. CORREA, M. SOUTO, L. GOMEZ, J. J. VIDAL, ″ Computer
assisted diagnosis: the classification of mammographic breast parenchymal patterns ″,
Phys. Med. Biol., 40, 103-117, (1995).

137
25. N. KARSSEMEIJER, ″ Automated classification of parenchymal patterns in
mammograms ″ , Phys. Med. Biol., 43, 1998, 365-378, (2000).
26. Z. HUO, M. L. GIGER, W. ZHONG, O. I. OLOPADE, ″ Analysis of relative
contributions of mammographic features and age to breast cancer risk prediction ″,
Proceedings of the 5th International Workshop on Digital Mammography, Toronto,
Canada, 732-736, (2000).
27. R. SIVARAMAKRISHNA, N. A. OBUCHOWSKI, W. A. CHILCOTE, K. A. POWELL,
″ Automatic segmentation of mammographic density ″, Acad. Radiol., 8, 250-256,
(2001).
28. R. M. RANGAYYAN, ″ Biomedical Image Analysis ″, CRC Press, The biomedical
Engineering Series, (2005).
29. R. M. HARALICK, K. SHANMUGAM, I. DINSTEIN, ″ Textural features for image
classification ″ , IEEE Transactions on Systems Man and Cybernetics, 3(6), 610-621.
(1973).
30. Référence Internet : www.ophtalmo.net/bv/GP/IndexGP/G/Recherche/recherche.html
31. Z. BEN SBEH., Une nouvelle méthode de segmentation en morphologie mathématique
basée sur la reconstruction géodésique. Application à l’extraction de drusen en imagerie
d’angiographie numérisée d’ophtalmologie. Thèse de l’Université de Paris IX Dauphine-
U.F.R Mathématique de la Décision, 1992.
32. F. ZANA., ″ Une Approche morphologique pour la détection et bayésienne pour le
recalage d’images multimodales: Application aux images rétiniennes ″ . Thèse de
Doctorat de l’Ecole Nationale Supérieure des Mines de Paris, (1999)
33. A. BARTHES., ″ Analyse automatique d’angiographies rétiniennes au cours de la
dégénérescence maculaire liée à l’âge ″. Thèse de l’Université de Droit, d’Economie et des
Sciences d’Aix Marseille III – Paul Cézanne (2000).
34. Référence Internet : www.snof.org/maladies/diabete.html
35. A. HADDOUCHE, M. ADEL, M. RASIGNI, S. BOURENNANE : ″ Statistical method
for foveal detection in retinal angiograms ″ . Electronic Letters, 41(11), May (2005).
36. ANIL K. JAIN: ″ Fundamentals of digital image processing ″, Prentice Hall International
Editions.
37. Konstantinos., B. Natarajan., S. Gregory, S. Yovanof: ″ Noise Estimation and Filtering
Using Block-Based Singular Value Decomposition ″, IEEE Transactions on Image
Processing, 6(3), (1997).

138
38. D. BOUKERROUI , ″ Segmentation Bayesienne d’images par une approche Markovienne
multirésolution. Application à l’imagerie échocardiographique et échographique 2D et
3D du sein″. Thèse de Doctorat de l’Institut National des Sciences Appliquées de Lyon,
soutenue le 02 mars 2000.
39. W. PIECZYNSKI : ″ Models de Markov en Traitement d’Images″, Traitement du Signal,
2003 – Volume 20(3), (2003).
40. A. HADDOUCHE : ″ Segmentation par une approche statistique de la zone avasculaire
centrale sur des angiographies numériques ″. Thèse de l’Université Paul Cézanne,
Marseille, soutenue le 29 septembre 2005.
41. L. M. LORIGO, O. D. FAUGERAS, W. E. GRIMSON, R. KERIVEN, R. KIKINIS, A.
NABAVI, et al. ″ CURVES: curve evolution for vessel segmentation ″. Medical Image
Analysis, 5, 195–206, (2001).
42. P. MA, D. MARAVALL, ″ A comparative study of contextual segmentation methods for
digital angiogram analysis ″ . Cybernetics and Systems: An International Journal, 35,
63–83, (2004).
43. KIRBAS C, QUEK F. ″ A review of vessel extraction techniques and algorithms. ACM ″
Computing Surveys, 36, 81–121, (2004).
44. A. LA CRUZ, M. STRAKA, A. KÖCHL, M. SRÀMEK, E. GRÖLLER, D.
FLEISCHMANN ″ Non-linear model fitting to parameterize diseased blood vessels ″ In:
Proceedings of IEEE Visualization Year. p. 393–400.
45. M. SUBASIC , S. LONCARIC , E. SORANTIN ″ Model-based quantitative AAA image
analysis using a priori knowledge ″, Computer Methods and Programs in
Biomedicine, 80,103–14, (2005).
46. K. A. VERMEER, F.M. VOS, H. G. LEMIJ, A. M. VOSSEPOEL, ″ A model based
method for retinal blood vessel detection ″ , Comput. Biol. Med., 34, 209–219, (2004).
47. L. ZHOU, M. RZESZOTARSKI, L. SINGERMAN, J. CHOKREFF, 1994. ″ The
detection and quantification of retinopathy using digital angiograms ″ . IEEE Trans.
Med. Imag. 13, 619–626, (1994).
48. X. GAO, A. BHARATH, A., HUGHES, A. STANTON, N. CHAPMAN, S. THOM ″
Towards retinal vessel parametrisation ″. In: SPIE Conference on Medical Imaging,
734–744, (1997).

139
49. X. GAO, A. BHARATH, A. STANTON, A. HUGHES, N. CHAPMAN, S. THOM, ″
Quantification and characterisation of arteries in retinal images ″. Comp. Meth.
Program. Biom. 63, 133–146, (2000).
50. Y. TOLIAS, S. PANAS, ″ A fuzzy vessel tracking algorithm for retinal images based on
fuzzy clustering″ . IEEE Trans. Med. Imag. 17, 263–273, (1998).
51. X. JIANG, D. MOJON, ″ Adaptive local thresholding by verification based multithreshold
probing with application to vessel detection in retinal images ″ . IEEE Trans. Pattern
Recogn. Anal. Mach. Intell. 25, 131–137, (2003).
52. S. CHAUDHURI, S. CHATTERJEE, N. KATZ, M. NELSON, M. GOLDBAUM, ″
Detection of blood vessels in retinal images using two-dimensional matched filters ″.
IEEE Trans. Med. Imag. 8, 263–269, (1989).
53. F. ZANA, J. KLEIN, ″ Robust segmentation of vessels from retinal angiography ″. In:
Proceedings of the International Conference on Digital Signal Processing, Santorini,
Greece, 1087–1090, (1997).
54. A. HOOVER, V. KOUZNETSOVA, M. GOLDBAUM, ″ Locating blood vessels in
retinal images by piecewise threshold probing of a matched filter response ″ . IEEE
Trans. Med. Imag. 19, 203–210, (2000)
55. A. CAN, H. SHEN , J.N. TURNER, H.L. TANENBAUM, B. ROYSAM, ″ Rapid
automated tracing and feature extraction from retinal fundus images using direct
exploratory algorithms ″, IEEE Transactions of Information Technology in
Biomedicine, 3 (2), 125-138, June (1999).
56. F. ZANA AND J. KLEIN, ″ Segmentation of vessel-like patterns using mathematical
morphology and curvature evaluation ″, IEEE Transactions on Image Processing,
10(7), 1010-1019, (2000).
57 H. LI, W. HSU, M. L. LEE, H. WANG, ″ A piecewise Gaussian model for profiling and
differentiating retinal vessels ″, in International Conference on Image Processing –
ICIP03, September (2003).
58. Y.A. TOLIAS , S. M. PANAS, ″ A fuzzy vessel tracking algorithm for retinal images
based on fuzzy clustering ″, IEEE Trans Med Imag, 17(2), 263-273, (1998).
59. A. D. FLEMMING, S. PHILIP, K. A. GOATMAN, J. A. OLSON, P. F. SHARP, ″
Automated Microaneurysm Detection Using Local Contrast Normalization and Local
Vessel Detection ″, IEEE Trans Med Imag, 25(9) ,1223-1232, September (2006).

140
60. A. M. MENDOSNÇA, S. MEMBER, IEE, A. CAMPILHO, ″ Segmentation of retinal
blood vessels by combining the detection of centerlines and morphological reconstruction
″, IEEE Trans Med Imag, 25(9) ,1200-1213, September (2006).
61. J. V. B. SOARES, J. J. G. LEANDRO, R. M. CESAR , H. F. JELINEK, M. J. CREE, ″
Retinal vessel segmentation using the 2-D Gabor Wavelet and Supervised Classification ″,
IEEE Trans Med Imag, 25(9), 1214-1222, September (2006).
62. M. E. MARTINEZ-PEREZ, A. D. HUGHES, S. A. THOM, A. A. BHARATH, K. H.
PARKER, ″ Segmentation of blood vessels from red-free and fluorescein retinal images ″,
Medical Image Analysis 11, 47–61 (2007).

141
Conclusion générale et projet de recherche
La synthèse décrite dans ce manuscrit est avant tout le travail d’une équipe, dont les membres
sont mes collègues co-encadrants mais également les étudiants en Master, DEA et Doctorat
dont je me suis occupé dans les différents laboratoires où j’ai développé mes travaux de
recherche. Tout au long des ces années, mes thématiques ont toujours été guidées par le souci
d’allier un travail méthodologique et de modélisation avec la volonté de l’adapter à des
applications de grand potentiel pour l’industrie et à l’expertise médicale. La vision artificielle
et d’autre part l’aide au diagnostic et au suivi médical assistés par ordinateur, sont les deux
thématiques sur lesquelles mes travaux de recherche ont porté.
Dans le cas de la première thématique, nous avons développé une approche algébrique rapide
concernant l’information de texture. Cette idée est née de l’expérience acquise dans le cadre
de ma thèse CIFRE, où les contraintes de temps de calcul imparti pour une tâche telle que la
segmentation par la texture, demeuraient incompatibles avec les techniques présentées dans la
littérature.
L’utilisation de la décomposition de la matrice de cooccurrence sur une base orthonormale
séparable a permis de définir de nouveaux attributs de texture pertinents. L’originalité de cette
approche réside dans le fait que ces attributs sont directement issus de la matrice de
cooccurrence, alors qu’ils sont habituellement évalués à partir de paramètres déduits de cette
matrice. Le cas de la classification supervisée de deux textures a été étudié et une optimisation
de ce problème a été donnée. L’étude d’une implémentation en temps réel de la méthodologie
en utilisant des corrélations a été développée, et a ainsi permis de réduire de façon
considérable les temps de calcul, relativement longs dans le cas de l’analyse de texture, tout
en gardant un pouvoir de discrimination satisfaisant. La généralisation de cette méthode au
cas de la classification d’un mélange de plusieurs textures, s’obtient en utilisant un critère
d’optimisation de séparation des textures deux à deux. Un des prolongements intéressant de
cette technique consiste à utiliser cette décomposition comme codage en synthèse de texture
en vue d’une ’’compression par la texture’’ par exemple. Le principal atout de cette approche
est sa rapidité, et une intégration en inspection de surface est envisageable à double titre : les
cadences mises en jeu sont compatibles avec les temps de calcul obtenus et l’approche par
apprentissage supervisé est une méthode adaptée à une automatisation ultérieure.
Le deuxième thème, lié à l’introduction de techniques de traitement du signal et des images
pour l’aide au diagnostic et au suivi médical, a été l’axe de recherche principal de ces

142
dernières années. Les problèmes abordés par ce thème ont été plus particulièrement axés sur
la réduction du bruit et la segmentation de régions d’intérêt médical.
La première partie de cette thématique a porté essentiellement sur le développement d’une
technique de rehaussement d’image par débruitage à partir de fonctions de modification d’un
contraste local, dépendant des statistiques du voisinage adaptatif de tout pixel de l’image. Le
choix de la nature de la fonction de modification du contraste conditionne la nature du
traitement : débruitage ou rehaussement de contraste. La recherche de la fonction optimale au
sens des moindres carrés permettant de débruiter des images entachées de bruit dépendant du
signal, a été menée et évaluée sur des images simulées. Les résultats obtenus ont été comparés
à d’autres méthodes de débruitage et ont permis de montrer la supériorité de la technique
développée.
En collaboration avec les radiologues d’ARCADES, - Association habilitée par les instances
nationales à effectuer le contrôle qualité des cabinets de radiologie participant aux campagnes
de dépistage des cancers du sein et du col de l’utérus-, nous avons travaillé sur la faisabilité de
l’évaluation de la qualité des sites de production de clichés mammographiques à partir
d’images de fantômes numérisés. Les résultats de débruitage obtenus permettent d’envisager
une automatisation du contrôle de qualité de ces installations, et dans un cadre plus général
d’intégrer ces travaux dans la nouvelle génération de mammographes numériques.
Dans la deuxième partie liée à cette thématique, nous avons entamé un travail sur la
segmentation statistique avec une application à l’imagerie médicale. L’exploitation de la
théorie statistique de la détection dans le cas du test binaire a permis d’élaborer une première
méthode basée sur le test du rapport de vraisemblance. Cette technique repose sur le choix
d’un couple de seuils permettant une décision optimale. Elle s’est avérée être très sensible
quant au choix de ces deux paramètres. Un compromis a pu être trouvé expérimentalement
pour obtenir une probabilité de détection satisfaisante tout en maintenant une probabilité de
fausse alarme à un niveau bas. L’adaptation de cette méthodologie aux angiographies
rétiniennes a nécessité l’utilisation de la décomposition en valeurs singulières de l’image
considérée comme une matrice, pour laquelle le choix du nombre de valeurs propres
singulières utilisées s’est avéré être déterminant pour la segmentation de la zone avasculaire
centrale.
Une seconde méthode de segmentation statistique utilisant l’approche Bayesienne a été
élaborée essentiellement pour la localisation de régions mais également pour la délimitation
de contours d’objets circulaires ou filiformes. Cette approche exploite la rupture statistique
qui intervient à la frontière des régions d’intérêt médical en modélisant le contour développé

143
de l’objet à segmenter sous la forme d’une chaîne de Markov monodimensionnelle. Nous
avons ainsi entrepris la segmentation des régions d’intérêt dans une mammographie en
concertation avec des radiologues experts de l’Hôpital de la Timone (Marseille). La
localisation de la zone avasculaire centrale et le suivi de l’arbre vasculaire sur des
angiographies rétiniennes ont aussi été étudiés, en collaboration avec le service
d’Ophtalmologie de l’Hôpital de la Timone. Les résultas très encourageants obtenus
permettent de conclure que les travaux développés constituent une bonne approche pour l’aide
à la détection assisté par ordinateur dans le cas de l’imagerie médicale.
Ce bilan effectué, il me semble important de signaler qu’il m’a été donné la possibilité de
participer à l’animation d’une équipe composée de chercheurs et d’étudiants universitaires
mais aussi de collaborer, dans un projet de recherche commun à caractère pluridisciplinaire,
avec une équipe de médecins radiologues experts et ophtalmologues.
Enfin signalons que cette deuxième thématique a été soutenue financièrement à l’échelle
Régionale et Nationale par la Ligue contre le Cancer, à l’échelle Internationale dans le cadre
de projets de collaboration avec un centre de recherche européen (Fraunhofer Institute for
Integrated Circuits IIS, Erlangen, Allemagne) et dans les pays du Maghreb (Ecole
Polytechnique d’Alger).
Les activités de recherche des années à venir s’inscrivent non seulement dans la continuité de
certains des axes déjà développés, mais s’ouvrent également sur d’autres thématiques.
Mon projet de recherche concerne essentiellement le traitement bas niveau (prétraitements) et
niveau intermédiaire (segmentation) de signaux multidimensionnels (signaux, images 2D et
volume d’images) avec principalement l’imagerie médicale comme domaine d’application.
Les activités de recherche déjà entamées et qui seront poursuivies concernent :
La segmentation d’une séquence de mammographies d’une même patiente prises dans le
temps à des fins de prédiction de l’apparition de cancer du sein. Cette étude requiert en plus
d’une segmentation robuste, une mise en correspondance des images, une recherche de
paramètres (statistiques, géométriques, de texture, de bruit …) et des algorithmes de
prédiction.
La mise au point d’un système d’acquisition des images du fond de l’œil incluant un
dispositif optique, un capteur hyperspectral, une station de travail permettant l’acquisition et
le traitement des données et une unité de commande d’un laser asservi aux lésions

144
segmentées. Ce travail bénéficie d’ores et déjà d’un soutien du ministère de l’Education
Nationale (Programme Pluri-Formation). Cette thématique est prévue en étroite collaboration
avec des partenaires industriels et académiques dans le cadre d’un projet ANR soumis en
2008.
Notons que pour ces deux activités deux thèses démarreront en septembre 2008.
Parallèlement à ces projets de recherche, d’autres thématiques seront abordées concernant
notamment la multimodalité et l’imagerie multidimensionnelle.
L’utilisation d’une seule modalité d’imagerie montre très vite ses limites et en particulier
pour les images médicales où un diagnostic précis repose généralement sur la confrontation
des information issues de plusieurs approches.
Dans le cadre de l’aide à la détection précoce et au diagnostic assistés par ordinateur, et
compte tenu de nouveaux modes exploratoires tels que la TEP (Tomographie par Emission de
Positons), il apparaît important de développer des techniques de mise en correspondance et de
segmentation adaptées.
Avec la création du Centre Européen de Recherche en Imagerie Médicale (CERIMED) à
Marseille, et le développement autour de ce centre de projets pour l’imagerie TEP du sein
associé à d’autres modalités, il nous semble également opportun de développer des recherches
sur les problèmes de reconstruction tomographique mais aussi sur les aspects concernant le
recalage et le positionnement.
Ainsi nous nous intéressons d’ores et déjà à l’imagerie 3D ultrasonore à partir de coupes
tomographiques du sein dans le cadre d’un projet que nous avons déposé en partenariat avec
le laboratoire de Mécanique et d’Acoustique de Marseille. Il s’agit dans un premier temps de
segmenter des images ultrasonores en prenant en compte la spécificité du bruit de speckle
contenu dans ces images. Dans une seconde phase une segmentation 3D par reconstruction
des images 2D segmentées est envisagée.
La mise en correspondance entre les images TEP et ultrasonore mais aussi TEP/X, pose des
problèmes de mise en œuvre en terme de recalage 2D/3D sur des images prises par des
machines géométriquement indépendantes. L’absence de repère anatomique fiable dans le cas
d’un organe mou comme le sein et la résolution différente des images issues de ces modalités
ouvrira des champs d’investigation certes complexes mais intéressants à la fois.
L’imagerie hyperspectrale pour les applications médicales en est à ses balbutiements, alors
qu’un grand nombre de travaux sont publiés pour des applications militaires et géographiques.

145
Nous sommes actuellement en contact avec un partenaire industriel pour définir un cadre de
travail, concernant l’apport d’un capteur hyperspectral dans l’aide au diagnostic dans le cas
des cancers de la peau. L’expertise de GSM dans le domaine de l’imagerie hyperspectrale sera
un atout important.
Dans cette quête d’analyse des images multimodales, il apparaît important d’aller vers des
structures de modélisation des données sous forme de tableaux à plusieurs entrées appelés
souvent ’’tenseurs’’ et de développer des techniques utilisant l’algèbre multilinéaire pour
prendre en compte les informations dans leur globalité.