Embed Size (px)
Citation preview
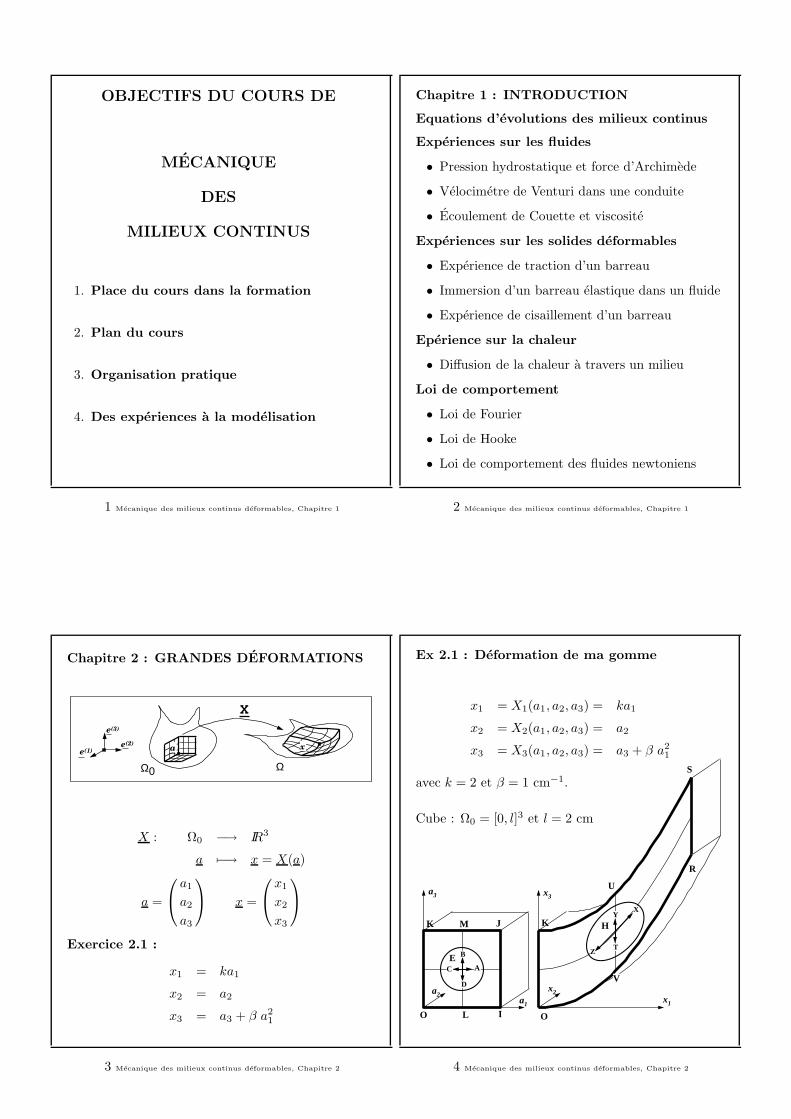
OBJECTIFS DU COURS DE
MECANIQUE
DES
MILIEUX CONTINUS
1. Place du cours dans la formation
2. Plan du cours
3. Organisation pratique
4. Des experiences a la modelisation
1 Mecanique des milieux continus deformables, Chapitre 1
Chapitre 1 : INTRODUCTION
Equations d’evolutions des milieux continus
Experiences sur les fluides
• Pression hydrostatique et force d’Archimede
• Velocimetre de Venturi dans une conduite
• Ecoulement de Couette et viscosite
Experiences sur les solides deformables
• Experience de traction d’un barreau
• Immersion d’un barreau elastique dans un fluide
• Experience de cisaillement d’un barreau
Eperience sur la chaleur
• Diffusion de la chaleur a travers un milieu
Loi de comportement
• Loi de Fourier
• Loi de Hooke
• Loi de comportement des fluides newtoniens
2 Mecanique des milieux continus deformables, Chapitre 1
Chapitre 2 : GRANDES DEFORMATIONS
X
e(1)e(2)
e(3)
Ω0 Ω
a x
X : Ω0 −→ IR3
a 7−→ x = X(a)
a =
a1
a2
a3
x =
x1
x2
x3
Exercice 2.1 :
x1 = ka1
x2 = a2
x3 = a3 + β a21
3 Mecanique des milieux continus deformables, Chapitre 2
Ex 2.1 : Deformation de ma gomme
x1 = X1(a1, a2, a3) = ka1
x2 = X2(a1, a2, a3) = a2
x3 = X3(a1, a2, a3) = a3 + β a21
avec k = 2 et β = 1 cm−1.
Cube : Ω0 = [0, l]3 et l = 2 cm
O I
E
K J
O
K
S
R
H
L
M
U
A
B
C
D
X
Z
Y
V
T
x2a2x1
x3a3
a1
4 Mecanique des milieux continus deformables, Chapitre 2

Matrice Jacobienne F (a) autour de a
F (a) : δa → δx = F δa
Y1
1.01
1.01
1
1
0.99
0.99
1 A
B
C
DZ
2.
2.01
T2
1,99
0
0.01
0.01
0
0
−0.01
−0.01
0δa
δa’
δa’’
δa’’’
X
F
O O
x a
X2.02
2.0201
1.98
1.9801
0.
−0.01δx’’’
δx 0.02
0.02
−0.02
−0.02δx’’
0
0.01δx’
X(a + δa) = X(a) + F (a) δa + O[
(δa)2]
5 Mecanique des milieux continus deformables, Chapitre 2
Matrice gradient de la deformation :F (a)
x’a’
X
Fe(1)
e(2)
e(3)
x
δx
a δa
x′ = X(a′) = X(a + δa) = X(a) + F (a) δa + O[(δa)2]
Fij(a) =∂Xi
∂aj
(a)
δx = F (a) δa + O[(δa)2]
δxi = Fij(a) δaj + O[(δa)2] =∂Xi
∂aj
(a) δaj + O[(δa)2]
6 Mecanique des milieux continus deformables, Chapitre 2
Calcul de F (E) pour ma gomme :
x1 = X1(a1, a2, a3) = ka1
x2 = X2(a1, a2, a3) = a2
x3 = X3(a1, a2, a3) = a3 + β a21
F (a) =
k 0 0
0 1 0
2βa1 0 1
Pour k = 2 et β = 1 cm−1 et dans le plan (e(1), e(3)) :
F (1, 1) =
(
2 0
2 1
)
δx =
(
0.02
0.02
)
=
(
2 0
2 1
) (
0.01
0
)
= F (a)δa
7 Mecanique des milieux continus deformables, Chapitre 2
Tenseur des dilatations
x’’
x’
δx’
δx
xa
a’a’’
δaδa’
X
F e(1)e(2)
e(3)
C(a ; δa, δa′) = δx · δx′ =tδx δx′ = δxi δx′i
=(
F δa)
·(
F δa′)
=t(
F δa) (
F δa′)
= tδa tFF δa′ = δai Fni Fnj δa′j
C(a) =t F (a) F (a)
Cij(a) = Cji(a) = Fni(a)Fnj(a)
En conclusion :
δx · δx′ = C(a ; δa, δa′) =t δa C(a) δa′ = δai Cij δa′j
8 Mecanique des milieux continus deformables, Chapitre 2
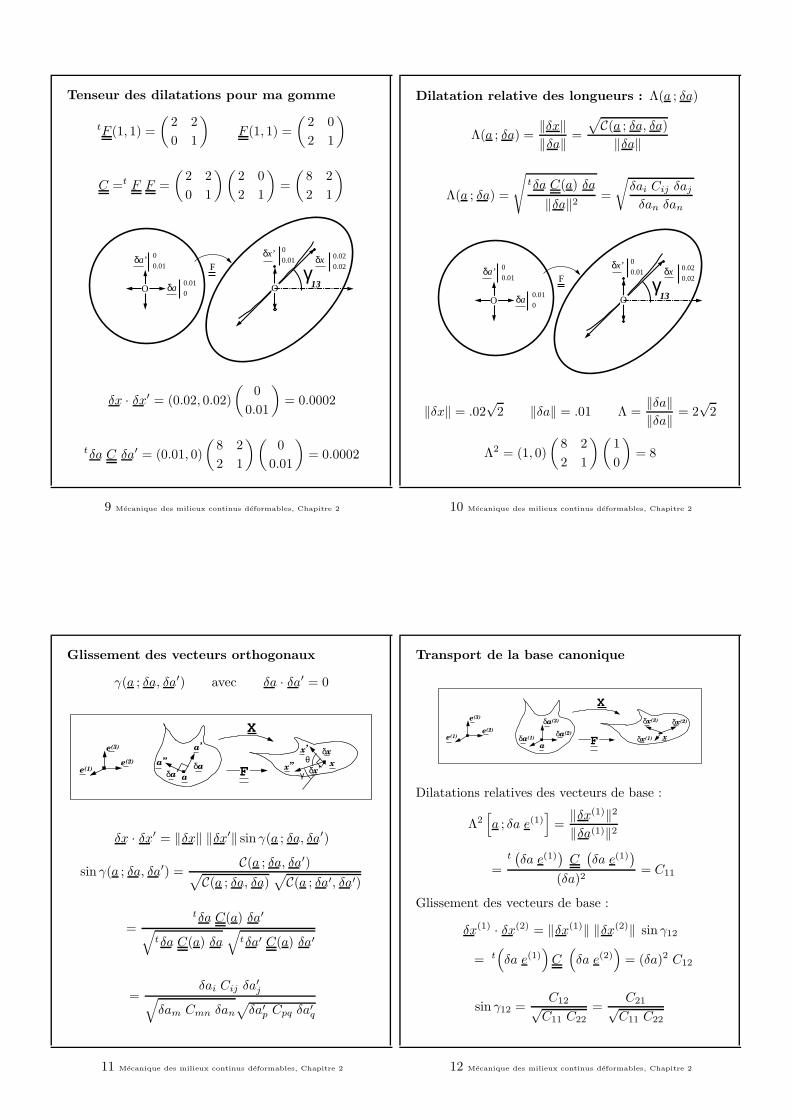
Tenseur des dilatations pour ma gomme
tF (1, 1) =
(
2 2
0 1
)
F (1, 1) =
(
2 0
2 1
)
C =t F F =
(
2 2
0 1
) (
2 0
2 1
)
=
(
8 2
2 1
)
0
0.01
0.01
0δa
δa’F
O O
δx 0.02
0.02
0
0.01δx’
γ13
δx · δx′ = (0.02, 0.02)
(
0
0.01
)
= 0.0002
tδa C δa′ = (0.01, 0)
(
8 2
2 1
) (
0
0.01
)
= 0.0002
9 Mecanique des milieux continus deformables, Chapitre 2
Dilatation relative des longueurs : Λ(a ; δa)
Λ(a ; δa) =‖δx‖‖δa‖ =
√
C(a ; δa, δa)
‖δa‖
Λ(a ; δa) =
√
tδa C(a) δa
‖δa‖2=
√
δai Cij δaj
δan δan
0
0.01
0.01
0δa
δa’F
O O
δx 0.02
0.02
0
0.01δx’
γ13
‖δx‖ = .02√
2 ‖δa‖ = .01 Λ =‖δa‖‖δa‖ = 2
√2
Λ2 = (1, 0)
(
8 2
2 1
) (
1
0
)
= 8
10 Mecanique des milieux continus deformables, Chapitre 2
Glissement des vecteurs orthogonaux
γ(a ; δa, δa′) avec δa · δa′ = 0
x’ δx
x
a
a’
δa
X
F e(1)e(2)
e(3)
a’’δx’x’’
δa’
θ
γ
δx · δx′ = ‖δx‖ ‖δx′‖ sinγ(a ; δa, δa′)
sin γ(a ; δa, δa′) =C(a ; δa, δa′)
√
C(a ; δa, δa)√
C(a ; δa′, δa′)
=tδa C(a) δa′
√
tδa C(a) δa√
tδa′ C(a) δa′
=δai Cij δa′
j√
δam Cmn δan
√
δa′p Cpq δa′
q
11 Mecanique des milieux continus deformables, Chapitre 2
Transport de la base canonique
ax
X
F e(1)
e(2)
e(3)
δa(2)
δa(1)
δx(3) δx(2)
δx(1)
δa(3)
Dilatations relatives des vecteurs de base :
Λ2[
a ; δa e(1)]
=‖δx(1)‖2
‖δa(1)‖2
=t(
δa e(1))
C(
δa e(1))
(δa)2= C11
Glissement des vecteurs de base :
δx(1) · δx(2) = ‖δx(1)‖ ‖δx(2)‖ sin γ12
= t(
δa e(1))
C(
δa e(2))
= (δa)2 C12
sin γ12 =C12√
C11 C22
=C21√
C11 C22
12 Mecanique des milieux continus deformables, Chapitre 2

Exemple de ma gomme
0
0.01
0.01
0δa
δa’F
O O
δx 0.02
0.02
0
0.01δx’
γ13
C =
(
8 2
2 1
)
C11 = Λ2[
a ; δa e(1)]
= 8
d’ou√
C11 = 2√
2.
sinγ13 =C13√
C11 C33
=2√8
=1√2
d’ou γ13 = π/4.
13 Mecanique des milieux continus deformables, Chapitre 2
Transport des volumes
δV0 = |(δa, δa′, δa′′)|
(δa, δa′, δa′′) = δa · (δa′ ∧ δa′′) = εijk δai δa′j δa′′
k
X
a
xF δa(2)
δa(1)
δx(3)δx(2)
δx(1)
δa(3)
e(1)e(2)
e(3)
δV = |(δx, δx′, δx′′)| = |(F δa, F δa′, F δa′′)|
= |detF | |(δa, δa′, δa′′)| = |detF | δV0
δVδV0
= J(a) = |detF (a)|
14 Mecanique des milieux continus deformables, Chapitre 2
Integrale volumique
x = X(a), F (a) = grad X(a)
δV = J(a) δV0, J(a) = |detF (a)|
X
a
x
BBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBδV0
δV
F e(1)e(2)
e(3)
∫∫∫
D
f(x) d3x =
∫∫∫
D0
f [X(a)] J(a) d3a
15 Mecanique des milieux continus deformables, Chapitre 2
Deformation inverse : A
A : Ω −→ Ω0
x 7−→ a = A(x)
Ω0
a x
A Ω
X
e(1)e(2)
e(3)
Representations eulerienne et lagrangienne
B(L)(a) = B(E)[X(a)] ⇐⇒ B(L)[A(x)] = B(E)(x)
Ω0
a x
Ω
X
A
BBBBBBBBBBBBBBBBBB
BB
( L)( a )
B( E )
( x)
e(1)e(2)
e(3)
B(L)(a) = B(E)(x) avec x = X(a)
16 Mecanique des milieux continus deformables, Chapitre 2
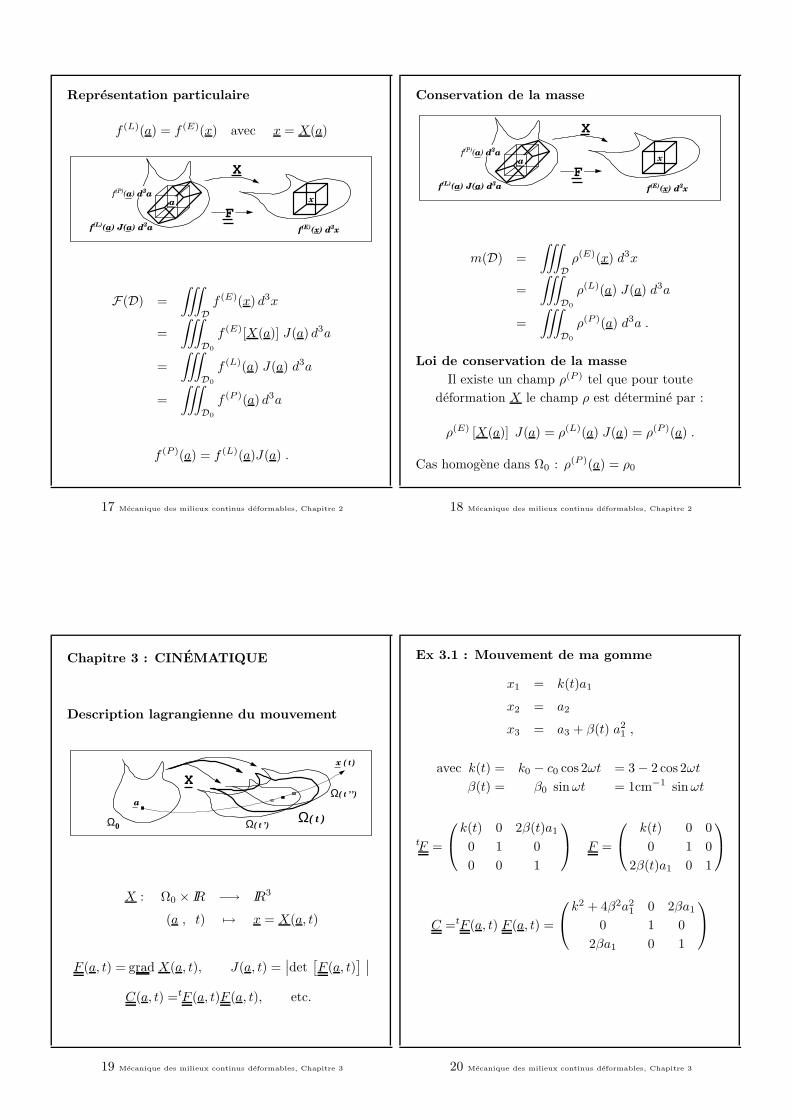
Representation particulaire
f (L)(a) = f (E)(x) avec x = X(a)
X
F f(E)(x) d3x
x
f(L)(a) J(a) d3a
f(P)(a) d3aa
F(D) =
∫∫∫
D
f (E)(x) d3x
=
∫∫∫
D0
f (E)[X(a)] J(a) d3a
=
∫∫∫
D0
f (L)(a) J(a) d3a
=
∫∫∫
D0
f (P )(a) d3a
f (P )(a) = f (L)(a)J(a) .
17 Mecanique des milieux continus deformables, Chapitre 2
Conservation de la masse
X
F f(E)(x) d3x
x
f(L)(a) J(a) d3a
f(P)(a) d3aa
m(D) =
∫∫∫
D
ρ(E)(x) d3x
=
∫∫∫
D0
ρ(L)(a) J(a) d3a
=
∫∫∫
D0
ρ(P )(a) d3a .
Loi de conservation de la masse
Il existe un champ ρ(P ) tel que pour toute
deformation X le champ ρ est determine par :
ρ(E) [X(a)] J(a) = ρ(L)(a) J(a) = ρ(P )(a) .
Cas homogene dans Ω0 : ρ(P )(a) = ρ0
18 Mecanique des milieux continus deformables, Chapitre 2
Chapitre 3 : CINEMATIQUE
Description lagrangienne du mouvement
Ω0
a
Xx ( t )
Ω( t )Ω( t ’)
Ω( t ’’)
X : Ω0 × IR −→ IR3
(a , t) 7→ x = X(a, t)
F (a, t) = grad X(a, t), J(a, t) =∣
∣det[
F (a, t)] ∣
∣
C(a, t) =tF (a, t)F (a, t), etc.
19 Mecanique des milieux continus deformables, Chapitre 3
Ex 3.1 : Mouvement de ma gomme
x1 = k(t)a1
x2 = a2
x3 = a3 + β(t) a21 ,
avec k(t) = k0 − c0 cos 2ωt = 3 − 2 cos 2ωt
β(t) = β0 sin ωt = 1cm−1 sin ωt
tF =
k(t) 0 2β(t)a1
0 1 0
0 0 1
F =
k(t) 0 0
0 1 0
2β(t)a1 0 1
C =tF (a, t) F (a, t) =
k2 + 4β2a21 0 2βa1
0 1 0
2βa1 0 1
20 Mecanique des milieux continus deformables, Chapitre 3

Deformations inverses
A : IR3 × IR −→ Ω0
(x , t) 7→ a = A(x, t)
A [X(a, t), t] = a ⇐⇒ X [A(x, t), t] = x
Exo 3.1 : Mouvement de ma gomme
x1 = k(t)a1
x2 = a2
x3 = a3 + β(t) a21 ,
Deformations inverses :
a1 = x1/k(t)
a2 = x2
a3 = x3 − β(t) x21/k2(t)
21 Mecanique des milieux continus deformables, Chapitre 3
Representations des champs
B(E) [X(a, t), t] = B(L)(a, t)
B(L) [A(x, t), t] = B(E)(x, t)
Exemple :
soit B(E)(x, t) = γ x21 t3 un champ
Mouvement de ma gomme :
X(a, t)
∣
∣
∣
∣
∣
∣
x1 = k(t) a1
x2 = a2
x3 = a3 + β(t) a21
Deformation inverse :
A(x, t)
∣
∣
∣
∣
∣
∣
a1 = x1/k(t)
a2 = x2
a3 = x3 − β(t) x21/k(t)2
Representation lagrangienne :
B(L)(a, t) = γ k2(t) a21 t3
22 Mecanique des milieux continus deformables, Chapitre 3
Loi de conservation de la masse
m [D(t)] =
∫∫∫
D(t)
ρ(E)(x, t) d3x
=
∫∫∫
D0
ρ(L)(a, t) J(a, t) d3a
ρ(L)(a, t) J(a, t) = ρ0
Exemple du mouvement de ma gomme :
F =
k(t) 0 0
0 1 0
2β(t)a1 0 1
=⇒ J(a, t) = k(t)
ρ(L)(a, t) = ρ0/k(t) = ρ(E)(x, t)
Car ρ est homogene en espace
23 Mecanique des milieux continus deformables, Chapitre 3
Champs de vitesse
a
Ω0U(E)( x* , t* )
x ( t)
U(L)(a , t* )
x* = x ( t*)
U (L)(a, t) =∂X
∂t(a, t)
U (E) [X(a, t), t] = U (L)(a, t)
U (L) [A(x, t), t] = U (E)(x, t)
Exemple : mouvement de ma gomme
X(a, t) =
k(t) a1
a2
a3 + β(t) a21
U (L)(a, t) =
k′(t) a1
0
β′(t) a21
, U (E)(x, t) =
k′(t)k(t) x1
0β′(t)k2(t) x2
1
24 Mecanique des milieux continus deformables, Chapitre 3
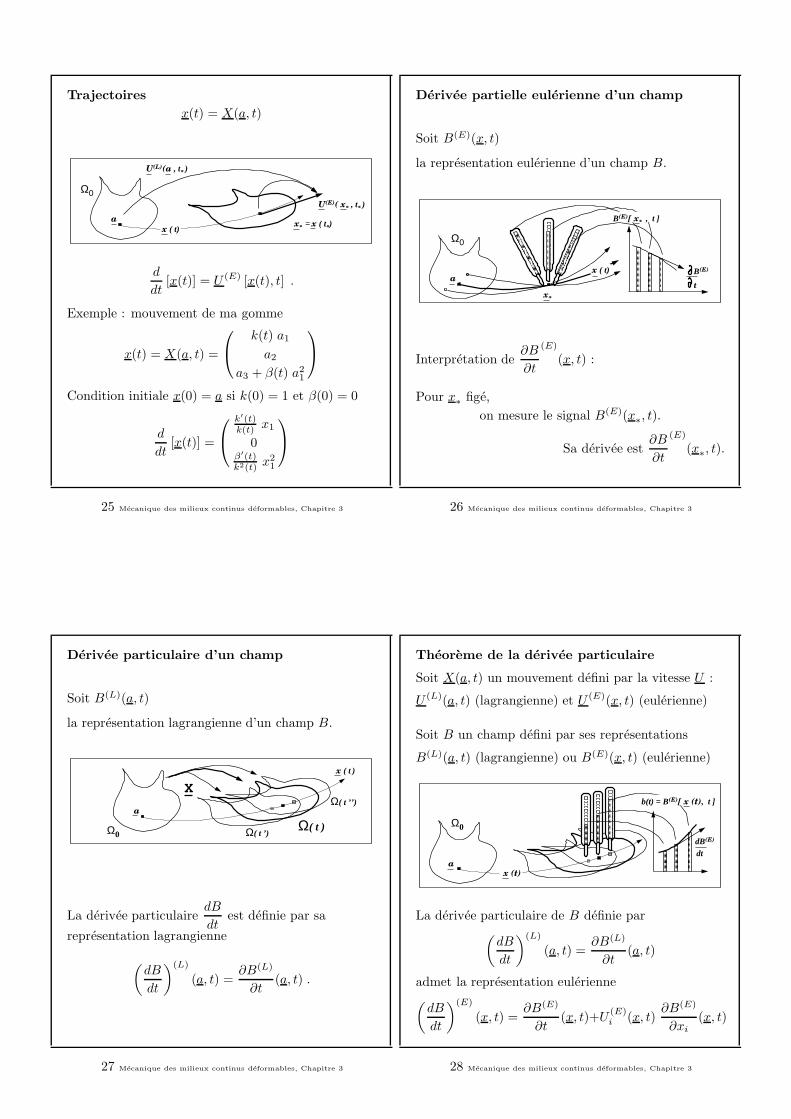
Trajectoires
x(t) = X(a, t)
a
Ω0U(E)( x* , t* )
x ( t)
U(L)(a , t* )
x* = x ( t*)
d
dt[x(t)] = U (E) [x(t), t] .
Exemple : mouvement de ma gomme
x(t) = X(a, t) =
k(t) a1
a2
a3 + β(t) a21
Condition initiale x(0) = a si k(0) = 1 et β(0) = 0
d
dt[x(t)] =
k′(t)k(t) x1
0β′(t)k2(t) x2
1
25 Mecanique des milieux continus deformables, Chapitre 3
Derivee partielle eulerienne d’un champ
Soit B(E)(x, t)
la representation eulerienne d’un champ B.
a
Ω0
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
x*
CCCCCC
CCCCCCCCC
x ( t)
BBBBBBBBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
B(E)
t
B(E)[ x* , t ]
Interpretation de∂B
∂t
(E)
(x, t) :
Pour x∗ fige,
on mesure le signal B(E)(x∗, t).
Sa derivee est∂B
∂t
(E)
(x∗, t).
26 Mecanique des milieux continus deformables, Chapitre 3
Derivee particulaire d’un champ
Soit B(L)(a, t)
la representation lagrangienne d’un champ B.
Ω0
a
Xx ( t )
Ω( t )Ω( t ’)
Ω( t ’’)
La derivee particulairedB
dtest definie par sa
representation lagrangienne
(
dB
dt
)(L)
(a, t) =∂B(L)
∂t(a, t) .
27 Mecanique des milieux continus deformables, Chapitre 3
Theoreme de la derivee particulaire
Soit X(a, t) un mouvement defini par la vitesse U :
U (L)(a, t) (lagrangienne) et U (E)(x, t) (eulerienne)
Soit B un champ defini par ses representations
B(L)(a, t) (lagrangienne) ou B(E)(x, t) (eulerienne)
a
x (t)
BBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
dB(E)
dt
Ω0
b(t) = B(E)[ x (t), t ]
La derivee particulaire de B definie par(
dB
dt
)(L)
(a, t) =∂B(L)
∂t(a, t)
admet la representation eulerienne(
dB
dt
)(E)
(x, t) =∂B(E)
∂t(x, t)+U
(E)i (x, t)
∂B(E)
∂xi
(x, t)
28 Mecanique des milieux continus deformables, Chapitre 3

Demonstration :
B(L)(a, t) = B(E) [X(a, t), t]
D’ou
∂B(L)
∂t(a, t) =
d
dt
B(E) [X(a, t), t]
=∂B(E)
∂t[X(a, t), t] +
∂Xi
∂t(a, t)
∂B(E)
∂xi
[X(a, t), t]
=∂B(E)
∂t[X(a, t), t] + U
(L)i (a, t)
∂B(E)
∂xi
[X(a, t), t]
=∂B(E)
∂t[X(a, t), t]+U
(E)i [X(a, t), t]
∂B(E)
∂xi
[X(a, t), t]
Car∂Xi
∂t(a, t) = U
(L)i (a, t)
et U(L)i (a, t) = U
(E)i [X(a, t), t]
29 Mecanique des milieux continus deformables, Chapitre 3
Demonstration (suite) :
On a vudB(L)
dt(a, t) =
∂B(E)
∂t[X(a, t), t] + U
(E)i [X(a, t), t]
∂B(E)
∂xi
[X(a, t), t]
Par definitiondB
dt
(L)
(a, t) =dB
dt
(E)
[X(a, t), t]
On a doncdB
dt
(E)
[X(a, t), t] =
∂B(E)
∂t[X(a, t), t] + U
(E)i [X(a, t), t]
∂B(E)
∂xi
[X(a, t), t]
D’ou l’on tire
dB
dt
(E)
(x, t) =∂B(E)
∂t(x, t) + U
(E)i (x, t)
∂B(E)
∂xi
(x, t)
30 Mecanique des milieux continus deformables, Chapitre 3
Interpretation geometrique
Soit b(t) = B(E) [x(t), t] ou x(t) est une trajectoire.
a
x (t)
BBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBB
BBBBBBBBBBBBBBBBBB
dB(E)
dt
Ω0
b(t) = B(E)[ x (t), t ]
b(t) = B(E) [X(a, t), t] = B(L)(a, t)
d
dt[b(t)] =
∂B(L)
∂t(a, t) =
dB
dt
(E)
[x(t), t]
d
dt[b(t)] =
d
dt
B(E) [x(t), t]
=∂B(E)
∂t[x(t), t] +
d
dt[xi(t)]
∂B(E)
∂xi
[x(t), t]
=∂B(E)
∂t[x(t), t] + U
(E)i [x(t), t]
∂B(E)
∂xi
[x(t), t]
31 Mecanique des milieux continus deformables, Chapitre 3
Description eulerienne du mouvement
U(x, t) = U (E)(x, t) champ de vitesse
Notations : grad , div , ∆ ou grad
dB
dt(x, t) =
∂B
∂t(x, t) + Uj(x, t)
∂B
∂xj
(x, t)
dB
dt=
∂B
∂t+ U · grad B
dB
dt=
∂B
∂t+tU grad B
dVi
dt=
∂Vi
∂t+ Uj
∂Vi
∂xj
dV
dt=
∂V
∂t+ (U · grad )V =
∂V
∂t+ [grad V ] U
32 Mecanique des milieux continus deformables, Chapitre 3

Determination des trajectoires
d
dt[x(t)] = U [x(t), t]
avec la condition initiale x(0) = a
a
Ω0=Ω( t0 )X
a’
a’’
U [x’( t), t ]
U [x’’( t), t ]
U [x( t), t ]
x’( t)x (t)
x ’’(t)
L’ensemble de toutes les trajectoires determine
X(a, t) = x(t) ou x(0) = a
Exemple : k(0) = 1 et β(0) = 0
d
dtx(t) = U [x(t), t] =
k′(t)k(t) x1
0β′(t)k2(t) x2
1
X(a, t) = x(t) =
k(t) a1
a2
a3 + β(t) a21
33 Mecanique des milieux continus deformables, Chapitre 3
Lignes de champ du champ de vitesse
Definition :
A l’instant t fixe les lignes de champ de U(x, t) sont
d
ds
[
y(s)]
= φ(s) U[
y(s), t]
avec φ(s) fonction strictement positive
Exemple 1 : φ(s) = 1
Exemple 2 : φ(s) = ‖U[
y(s), t]
‖−1
Definitions equivalentes :
d
ds
[
y(s)]
∧ U[
y(s), t]
= 0
dy1
U1=
dy2
U2=
dy3
U3
34 Mecanique des milieux continus deformables, Chapitre 3
Gradient du champ de vitesse
Soit x et x′ deux points tres proches
On note δx = x′ − x
A l’instant t,
on compare leur vitesse eulerienne :
U(x′, t) − U(x, t) = K(x, t) δx + O[
(δx)2]
La matrice K
est le gradient du champ de vitesse en x et t :
K(x, t) = grad U(x, t)
ou encore
Kij(x, t) =∂Ui
∂xj
(x, t)
35 Mecanique des milieux continus deformables, Chapitre 3
Vecteurs transportes par le mouvement
Soit x(t) et x′(t) deux trajectoires tres proches
On note δx(t) = x′(t) − x(t)
x ’( t)
x ( t* )
a’ x ’( t* )
a
x ( t)
Ω0δx ( t)
δx ( t* ) U [ x ’( t
* ), t* ]
U [ x ( t* ), t* ]
K U δx ( t* )
δx ( t)
d
dt[δx(t)] =
d
dt[x′(t)] − d
dt[x(t)]
= U [x′(t), t] − U [x(t), t]
= K [x(t), t] δx(t) + O[
(δx)2]
Un vecteur δx(t) transporte par le mouvement
verifie donc
d
dt[δx(t)] = K [x(t), t] δx(t)
36 Mecanique des milieux continus deformables, Chapitre 3

Vecteur rotation
K(x, t) = D(x, t) + Ω(x, t)
avec
D =1
2
(
K +t K)
et Ω =1
2
(
K −t K)
.
Tenseur des taux de rotation :
Ωij(x, t) =1
2
[
∂Ui
∂xj
(x, t) − ∂Uj
∂xi
(x, t)
]
.
Vecteur rotation : ω(x, t) = 12 rot [U(x, t)]
ωi(x, t) =1
2εijk
∂Uk
∂xj
(x, t)
On montre que
Ω(x, t)δx = ω(x, t) ∧ δx
Formules pratiques a retenir :
ω1 + Ω23 = 0, ω2 − Ω13 = 0 et ω3 + Ω12 = 0
37 Mecanique des milieux continus deformables, Chapitre 3
Cas particulier K(x, t) = Ω(x, t)
Supposons que D(x, t) = 0 pour un x et un t
d
dt[δx(t)] = Ω(x, t)δx(t) = ω(x, t) ∧ δx(t)
Dans le voisinage de x on a
U(x′, t) ∼ U(x, t) + ω(x, t) ∧ [x′ − x] + O[
(δx)2]
Interpretation :
Mouvement solide autour de x et au temps t
(voir complement sur les distributeurs)
Cas general : K = Ω + D
Mouvement solide local plus deformation locale !
38 Mecanique des milieux continus deformables, Chapitre 3
Transport du produit scalaire
Soit x(t), x′(t) et x′′(t) trois trajectoires tres proches
δx(t) = x′(t) − x(t) et δx′(t) = x′′(t) − x(t)
x ’( t)
a’
aa’’
x ’( t* )
x ’’( t* )
δx ( t* )x ( t* )
δx ’( t* )
x ( t)
x ’’( t)
δx ( t)
δx ’( t)
Ω0
d
dt[δx] = K [x(t), t] δx et
d
dt[δx′] = K [x(t), t] δx′
On a ddt
[δx(t) · δx′(t)] =
= δx(t) · d
dt[δx′(t)] +
d
dt[δx(t)] · δx′(t)
=t δx(t) K [x(t), t] δx′(t) + tδx(t) tK [x(t), t] δx′(t)
= 2 tδx(t) D [x(t), t] δx′(t)
avec D = 12
(
K +t K)
39 Mecanique des milieux continus deformables, Chapitre 3
Tenseur des taux de deformations
D =1
2
(
K +t K)
Dij(x, t) =1
2
[
∂Ui
∂xj
(x, t) +∂Uj
∂xi
(x, t)
]
.
Pour δx(t) et δx′(t) transportes par le mouvement
d
dt
[
δx(t) · δx′(t)]
= 2 tδx(t) D(x, t) δx′(t)
Taux d’allongement relatif :
En appliquant δx(t) = δx′(t) on obtient
2 ‖δx(t)‖ d
dt‖δx(t)‖ = 2 tδx(t) D(x, t) δx(t)
1
‖δx(t)‖d
dt‖δx(t)‖ =
tδx(t) D(x, t) δx(t)
‖δx(t)‖2
40 Mecanique des milieux continus deformables, Chapitre 3
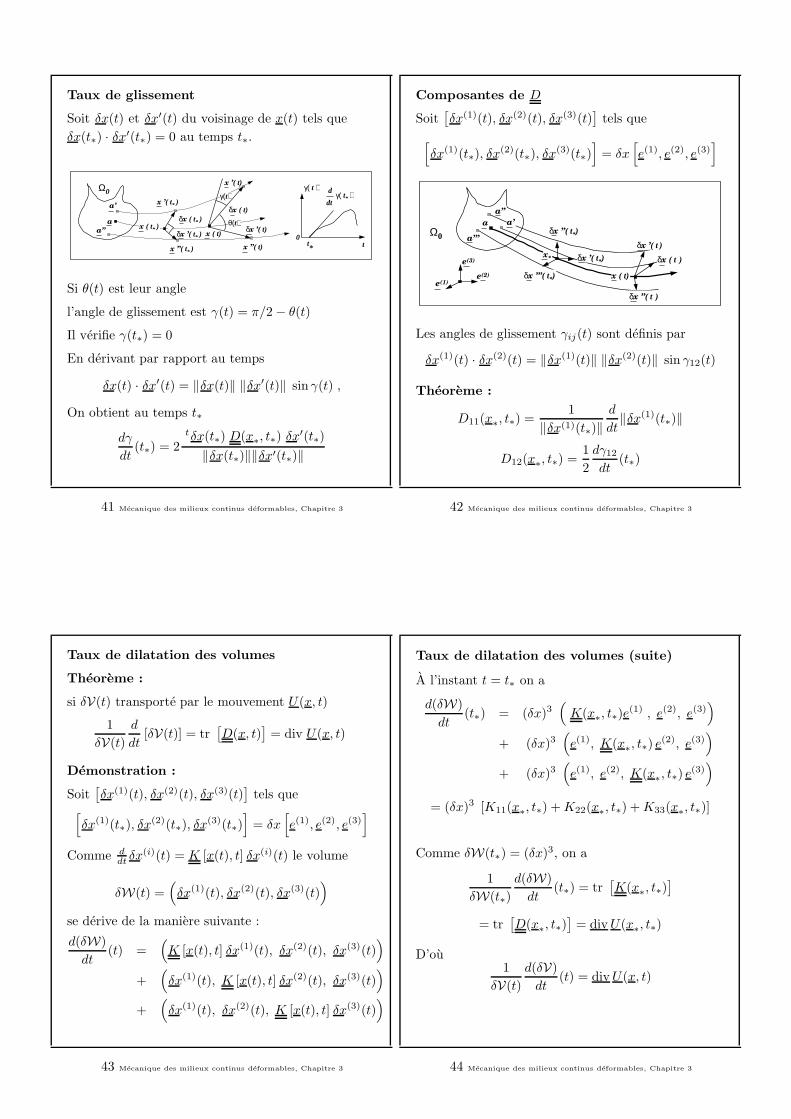
Taux de glissement
Soit δx(t) et δx′(t) du voisinage de x(t) tels que
δx(t∗) · δx′(t∗) = 0 au temps t∗.
x ’( t)
a’
aa’’
x ’( t* )
x ’’( t* )
δx ( t* )x ( t* )
δx ’( t* )
x ’’( t)
δx ( t)
δx ’( t)
Ω0
x ( t)
θ(t)
γ( t )
tt*
0
γ(t)d
dtγ( t* )
Si θ(t) est leur angle
l’angle de glissement est γ(t) = π/2 − θ(t)
Il verifie γ(t∗) = 0
En derivant par rapport au temps
δx(t) · δx′(t) = ‖δx(t)‖ ‖δx′(t)‖ sinγ(t) ,
On obtient au temps t∗
dγ
dt(t∗) = 2
tδx(t∗) D(x∗, t∗) δx′(t∗)
‖δx(t∗)‖‖δx′(t∗)‖
41 Mecanique des milieux continus deformables, Chapitre 3
Composantes de D
Soit[
δx(1)(t), δx(2)(t), δx(3)(t)]
tels que
[
δx(1)(t∗), δx(2)(t∗), δx(3)(t∗)]
= δx[
e(1), e(2), e(3)]
e(1)e(2)
e(3)
Ω0δx ’’( t*)
δx ’’’( t*)
δx ’( t )
δx ’’( t )
x* δx ’( t*)
a
a’’
a’
a’’’
δx ( t )
x ( t)
Les angles de glissement γij(t) sont definis par
δx(1)(t) · δx(2)(t) = ‖δx(1)(t)‖ ‖δx(2)(t)‖ sin γ12(t)
Theoreme :
D11(x∗, t∗) =1
‖δx(1)(t∗)‖d
dt‖δx(1)(t∗)‖
D12(x∗, t∗) =1
2
dγ12
dt(t∗)
42 Mecanique des milieux continus deformables, Chapitre 3
Taux de dilatation des volumes
Theoreme :
si δV(t) transporte par le mouvement U(x, t)
1
δV(t)
d
dt[δV(t)] = tr
[
D(x, t)]
= div U(x, t)
Demonstration :
Soit[
δx(1)(t), δx(2)(t), δx(3)(t)]
tels que[
δx(1)(t∗), δx(2)(t∗), δx
(3)(t∗)]
= δx[
e(1), e(2), e(3)]
Comme ddt
δx(i)(t) = K [x(t), t] δx(i)(t) le volume
δW(t) =(
δx(1)(t), δx(2)(t), δx(3)(t))
se derive de la maniere suivante :
d(δW)
dt(t) =
(
K [x(t), t] δx(1)(t), δx(2)(t), δx(3)(t))
+(
δx(1)(t), K [x(t), t] δx(2)(t), δx(3)(t))
+(
δx(1)(t), δx(2)(t), K [x(t), t] δx(3)(t))
43 Mecanique des milieux continus deformables, Chapitre 3
Taux de dilatation des volumes (suite)
A l’instant t = t∗ on a
d(δW)
dt(t∗) = (δx)3
(
K(x∗, t∗)e(1) , e(2), e(3)
)
+ (δx)3(
e(1), K(x∗, t∗) e(2), e(3))
+ (δx)3(
e(1), e(2), K(x∗, t∗) e(3))
= (δx)3 [K11(x∗, t∗) + K22(x∗, t∗) + K33(x∗, t∗)]
Comme δW(t∗) = (δx)3, on a
1
δW(t∗)
d(δW)
dt(t∗) = tr
[
K(x∗, t∗)]
= tr[
D(x∗, t∗)]
= div U(x∗, t∗)
D’ou1
δV(t)
d(δV)
dt(t) = div U(x, t)
44 Mecanique des milieux continus deformables, Chapitre 3
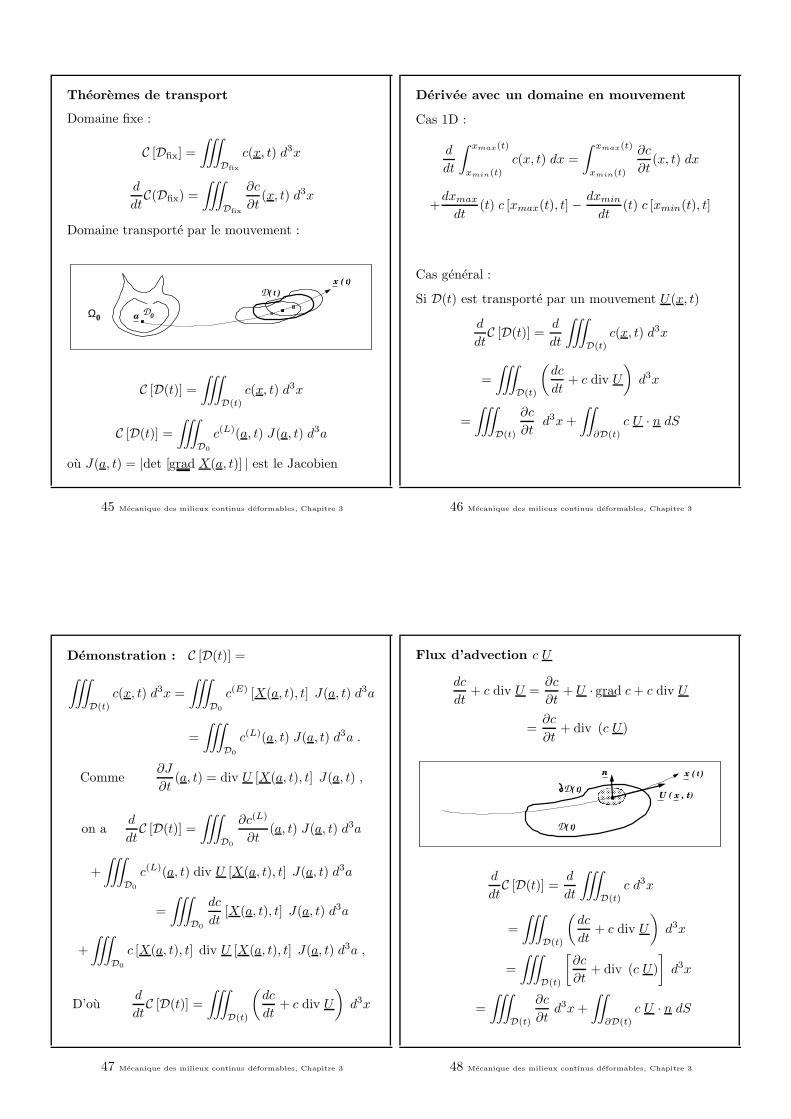
Theoremes de transport
Domaine fixe :
C [Dfix] =
∫∫∫
Dfix
c(x, t) d3x
d
dtC(Dfix) =
∫∫∫
Dfix
∂c
∂t(x, t) d3x
Domaine transporte par le mouvement :
aΩ0
D( t )
D0
x ( t)
C [D(t)] =
∫∫∫
D(t)
c(x, t) d3x
C [D(t)] =
∫∫∫
D0
c(L)(a, t) J(a, t) d3a
ou J(a, t) = |det [grad X(a, t)] | est le Jacobien
45 Mecanique des milieux continus deformables, Chapitre 3
Derivee avec un domaine en mouvement
Cas 1D :
d
dt
∫ xmax(t)
xmin(t)
c(x, t) dx =
∫ xmax(t)
xmin(t)
∂c
∂t(x, t) dx
+dxmax
dt(t) c [xmax(t), t] − dxmin
dt(t) c [xmin(t), t]
Cas general :
Si D(t) est transporte par un mouvement U(x, t)
d
dtC [D(t)] =
d
dt
∫∫∫
D(t)
c(x, t) d3x
=
∫∫∫
D(t)
(
dc
dt+ c div U
)
d3x
=
∫∫∫
D(t)
∂c
∂td3x +
∫∫
∂D(t)
c U · n dS
46 Mecanique des milieux continus deformables, Chapitre 3
Demonstration : C [D(t)] =
∫∫∫
D(t)
c(x, t) d3x =
∫∫∫
D0
c(E) [X(a, t), t] J(a, t) d3a
=
∫∫∫
D0
c(L)(a, t) J(a, t) d3a .
Comme∂J
∂t(a, t) = div U [X(a, t), t] J(a, t) ,
on ad
dtC [D(t)] =
∫∫∫
D0
∂c(L)
∂t(a, t) J(a, t) d3a
+
∫∫∫
D0
c(L)(a, t) div U [X(a, t), t] J(a, t) d3a
=
∫∫∫
D0
dc
dt[X(a, t), t] J(a, t) d3a
+
∫∫∫
D0
c [X(a, t), t] div U [X(a, t), t] J(a, t) d3a ,
D’oud
dtC [D(t)] =
∫∫∫
D(t)
(
dc
dt+ c div U
)
d3x
47 Mecanique des milieux continus deformables, Chapitre 3
Flux d’advection c U
dc
dt+ c div U =
∂c
∂t+ U · grad c + c div U
=∂c
∂t+ div (c U)
CCCCCCCCCCCCCCCCCCCC
n
U ( x , t)
x ( t )
D( t)
D( t)
d
dtC [D(t)] =
d
dt
∫∫∫
D(t)
c d3x
=
∫∫∫
D(t)
(
dc
dt+ c div U
)
d3x
=
∫∫∫
D(t)
[
∂c
∂t+ div (c U)
]
d3x
=
∫∫∫
D(t)
∂c
∂td3x +
∫∫
∂D(t)
c U · n dS
48 Mecanique des milieux continus deformables, Chapitre 3

Conservation de la masse
m [D(t)] =
∫∫∫
D(t)
ρ(x, t) d3x
Si m [D(t)] est invariant :
d
dtm [D(t)] =
∫∫∫
D(t)
(
dρ
dt+ ρ div U
)
d3x = 0
Expressions locales de la conservation de la masse :
dρ
dt+ ρ div U = 0
∂ρ
∂t+ U · grad ρ + ρ div U = 0
∂ρ
∂t+ div (ρ U) = 0 .
Ecoulement isochore :
div U = 0 =⇒ dρ
dt= 0
49 Mecanique des milieux continus deformables, Chapitre 3
Theoreme de transport de Reynolds
On pose c(x, t) = ρ(x, t) φ(x, t)
Theoreme : si la masse est conservee, on peut ecrire
d
dtC [D(t)] =
d
dt
∫∫∫
D(t)
ρ φ d3x =
∫∫∫
D(t)
ρdφ
dtd3x
Demonstration :
d
dtC [D(t)] =
d
dt
∫∫∫
D(t)
ρ(x, t) φ(x, t) d3x
=d
dt
∫∫∫
D0
ρ(L)(a, t) J(a, t) φ(L)(a, t) d3a
=d
dt
∫∫∫
D0
ρ0(a) φ(L)(a, t) d3a
=
∫∫∫
D0
ρ0(a)∂φ(L)
∂t(a, t) d3a
=
∫∫∫
D0
ρ(L)(a, t) J(a, t)dφ
dt
(L)
(a, t) d3a
=
∫∫∫
D(t)
ρ(x, t)dφ
dt(x, t) d3x
50 Mecanique des milieux continus deformables, Chapitre 3
Cas des integrales de champs de vecteurs
d
dtF [D(t)] =
d
dt
∫∫∫
D(t)
F d3x
=
∫∫∫
D(t)
(
dF
dt+ Fdiv U
)
d3x
=
∫∫∫
D(t)
(
∂F
∂t+ U · grad F + Fdiv U
)
d3x
=
∫∫∫
D(t)
[
∂F
∂t+ div (F ⊗ U)
]
d3x
=
∫∫∫
D(t)
∂F
∂td3x +
∫∫
∂D(t)
F (U · n) dS
F (x, t) ⊗ U(x, t) tenseur d’ordre 2
dont les composantes sont Fi(x, t) Uj(x, t).
Complements : champ d’acceleration
Γ =∂U
∂t+ rot U ∧ U +
1
2grad U2
51 Mecanique des milieux continus deformables, Chapitre 3
Complements : Torseurs
M(x) = M(0) + R ∧ x
M(0) : moment en 0 | R : resultante du torseur
On montre que pour tout x et tout y on a
M(x) = M(y) + R ∧ (x − y)
Elements de reduction : (∆, M∆, R)
Il existe une droite ∆ parallele a R telle que
M(y) = M∆ parallele a R pour tout y ∈ ∆
Théorie des torseurs
R
M∆M(x)
!!!!!!!!!x
y
M(x) =M (0) + R x
M(x) = M∆ + R ( x − y ) M (0)!!!!!!
0
!!!!!!
∆
On a donc pour x et tout y ∈ ∆
M(x) = M∆ + R ∧ (x − y)
52 Mecanique des milieux continus deformables, Chapitre 3

Distributeurs et Torseurs
Distributeur : U(x) = U(0) + Ω ∧ x
U(0) : vitesse en 0 | Ω : vecteur rotation
Torseur : C(x) = C(0) + F ∧ x
C(0) : moment en 0 | F : resultante du torseur
Decompositions des torseurs et distributeurs
Distributeur = mouvement de rotation + mouvement uniforme
U∆y
!!!!!!!!!
Ω Ω
U∆x
!!!!!!!!!
Torseur = force pure + couple uniforme
C∆y
!!!!!!!!!
F
C∆x!!!
!!!
F
∆ ∆
∆∆
(Distributeur) = (Mvt rotation) + (Mvt uniforme)
(∆, U∆, Ω) = (∆, 0, Ω) + (∅, U∆, 0)
( Torseur ) = ( Force pure ) + ( Couple uniforme)
(∆, C∆, F ) = (∆, 0, R) + (∅, C∆, 0)
53 Mecanique des milieux continus deformables, Chapitre 3
Dualite Torseurs / Distributeur
Notation pour un Torseur :
[C] = [0, F , C(0)]
Notation pour un Distributeur :
U = 0, U(0), Ω
Puissance du couple Torseur / Distributeur
P = [C]U = F · U(0) + C(0) · Ω
On montre que pour tout x on a
P = [C]U = F · U(x) + C(x) · Ω
54 Mecanique des milieux continus deformables, Chapitre 3
Complements : Systemes dynamiques
Trajectoires du champs de vitesse U(x, t) :
dx
dt(t) = U [x(t), t]
Systeme dynamique autonome :
dx
dt(t) = U [x(t)]
Si xe est un equilibre : U(xe) = 0
On pose x(t) = xe + y(t). Tant que y est petit
dy
dt(t) = A y(t)
avec A = K(xe) = grad U(xe)
valeurs propres
s1 > 0 et s2 < 0
xexe
valeurs propres
s= r + i ω avec r <0
xe
bloc de
Jordan0 1
0 0
55 Mecanique des milieux continus deformables, Chapitre 3
Complements : Surface de discontinuite
c (x, t) = c(b)(x, t) − c(a)(x, t) ,
D(a)
D(b)
D(b)
D(a)
ΣΩ
W
U
n(a)
n(b)
W
U
d
dt
∫∫∫
D(t)
c d3x =
∫∫∫
D(t)
[
∂c
∂t+ div (c U)
]
d3x
+
∫∫
Σ(t)
c(U − W ) · n dS
56 Mecanique des milieux continus deformables, Chapitre 3
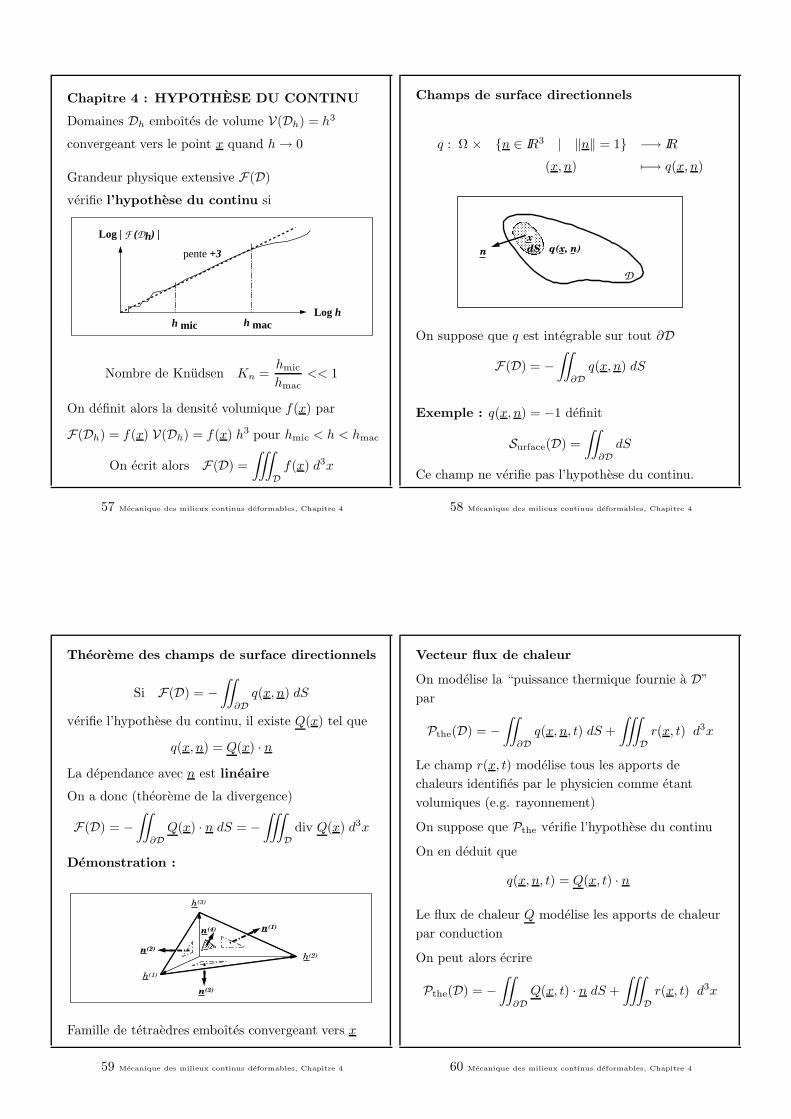
Chapitre 4 : HYPOTHESE DU CONTINU
Domaines Dh emboıtes de volume V(Dh) = h3
convergeant vers le point x quand h → 0
Grandeur physique extensive F(D)
verifie l’hypothese du continu si
Log h
Log | F (Dh) |
pente +3
h mic h mac
Nombre de Knudsen Kn =hmic
hmac<< 1
On definit alors la densite volumique f(x) par
F(Dh) = f(x) V(Dh) = f(x) h3 pour hmic < h < hmac
On ecrit alors F(D) =
∫∫∫
D
f(x) d3x
57 Mecanique des milieux continus deformables, Chapitre 4
Champs de surface directionnels
q : Ω × n ∈ IR3 | ‖n‖ = 1 −→ IR
(x, n) 7−→ q(x, n)
CCCCCCCCCCCCCCCCCCCCCCCCC
n q(x, n)dS
D
x
On suppose que q est integrable sur tout ∂D
F(D) = −∫∫
∂D
q(x, n) dS
Exemple : q(x, n) = −1 definit
Surface(D) =
∫∫
∂D
dS
Ce champ ne verifie pas l’hypothese du continu.
58 Mecanique des milieux continus deformables, Chapitre 4
Theoreme des champs de surface directionnels
Si F(D) = −∫∫
∂D
q(x, n) dS
verifie l’hypothese du continu, il existe Q(x) tel que
q(x, n) = Q(x) · n
La dependance avec n est lineaire
On a donc (theoreme de la divergence)
F(D) = −∫∫
∂D
Q(x) · n dS = −∫∫∫
D
div Q(x) d3x
Demonstration :
++++++++++++
h(1)
h(2)
h(3)
n(1)
n(2)
n(3)
n(4)
Famille de tetraedres emboıtes convergeant vers x
59 Mecanique des milieux continus deformables, Chapitre 4
Vecteur flux de chaleur
On modelise la “puissance thermique fournie a D”
par
Pthe(D) = −∫∫
∂D
q(x, n, t) dS +
∫∫∫
D
r(x, t) d3x
Le champ r(x, t) modelise tous les apports de
chaleurs identifies par le physicien comme etant
volumiques (e.g. rayonnement)
On suppose que Pthe verifie l’hypothese du continu
On en deduit que
q(x, n, t) = Q(x, t) · n
Le flux de chaleur Q modelise les apports de chaleur
par conduction
On peut alors ecrire
Pthe(D) = −∫∫
∂D
Q(x, t) · n dS +
∫∫∫
D
r(x, t) d3x
60 Mecanique des milieux continus deformables, Chapitre 4
Theoreme de la divergence des tenseurs
Si σ(x) =
σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ23
on definit
div σ(x) =
∂σ11
∂x1+ ∂σ12
∂x2+ ∂σ13
∂x3
∂σ21
∂x1+ ∂σ22
∂x2+ ∂σ23
∂x3
∂σ31
∂x1+ ∂σ32
∂x2+ ∂σ33
∂x3
=
∂σ1j
∂xj
∂σ2j
∂xj
∂σ3j
∂xj
Generalisation du theoreme de la divergence :∫∫
∂D
σ(x)n dS =
∫∫∫
D
div σ(x) d3x
Demonstration :∫∫
∂D
σij nj dS =
∫∫∫
D
∂σij
∂xj
d3x
61 Mecanique des milieux continus deformables, Chapitre 4
Complements : Modele particulaire
Equation de la chaleur
x (i+1/2)
x (i) x (i+1)
x (i−1/2)
x (i−1)
x (i+3/2)
O x
ρ Cp
∂T
∂t= k
∂2T
∂x2
Deformations et cinematique
O x
O a
x (i+1)x (i)x (i−1)
a (i+1)a(i)a (i−1)
ξ (i)x (i+1/2)
L0/N
Forces de contact
−m g
σ (x (i+1/2))F
(i+1, i)IF
(i, i+1)I
Τ(x (i+1/2), 1)Τ(x (i+1/2), −1) −m g
F(i, i−1)
I F(i+1, i+2)
I
x (i) x (i+1/2) x (i+1)
62 Mecanique des milieux continus deformables, Chapitre 4
Chapitre 5 : TENSEUR DES
CONTRAINTES
Mise en evidence des forces de contact
F F
Fcont
On decoupe un morceau de matiere occupant le
sous-domaine D a l’interieur du milieu
On remplace la matiere par une distribution
surfacique de forces −F cont(x, ∂D)
On en deduit que l’exterieur de D exerce sur sa
frontiere ∂D une distribution de forces de contact
F cont(x, ∂D).
Meme raisonnement en presence d’un champ de
gravite g
63 Mecanique des milieux continus deformables, Chapitre 5
Enumeration des forces :
Forces Resultante Moment Puissance
ext vol Fextvol(D) Mextvol(D) Pextvol(D)
ext cont Fextcont(D) Mextcont(D) Pextcont(D)
int vol F intvol(D) Mintvol(D) Pintvol(D)
int cont F intcont(D) Mintcont(D) Pintcont(D)
Modelisations des forces :
Fextvol(D) = Mextvol(D) = Pextvol(D) =
∫∫∫
Df(x) d3x
∫∫∫
Dx ∧ f d3x
∫∫∫
Df · U d3x
Fextcont(D) = Mextcont(D) = Pextcont(D) =
∫∫
∂DF cont(x, ∂D) dS
∫∫
∂Dx ∧ F cont dS
∫∫
∂DF cont · U dS
F intvol(D) = 0 Mintvol(D) = 0 Pintvol(D) = 0
F intcont(D) = 0 Mintcont(D) = 0 Pintcont(D) 6= 0
64 Mecanique des milieux continus deformables, Chapitre 5
Forces exterieures de volume
Fextvol(D) =
∫∫∫
D
f(x) d3x
Mextvol(D) =
∫∫∫
D
x ∧ f d3x
Pextvol(D) =
∫∫∫
D
f · U d3x
Exemple : forces de gravite
f(x) = −ρ(x) g e(3)
65 Mecanique des milieux continus deformables, Chapitre 5
Forces de contact exterieures a D
Fextcont(D) =
∫∫
∂D
F cont(x, ∂D) dS
Mextcont(D) =
∫∫
∂D
x ∧ F cont dS
Pextcont(D) =
∫∫
∂D
F cont · U dS
Densite surfacique de forces de contact F cont(x, ∂D) :
D
D
D
Fcont ( x , D )
− Fcont ( x , D )
Fcont
Interactions de courte portee entre les molecules
proches de la frontiere ∂D
66 Mecanique des milieux continus deformables, Chapitre 5
Forces interieures de volume
On neglige les interactions volumiques entre les
particules du domaine
F intvol(D) = 0
Mintvol(D) = 0
Pintvol(D) = 0
Forces interieures de contact
Consequence du principe de l’action et de la reaction
F intcont(D) = 0
Mintcont(D) = 0
Pintcont(D) 6= 0 (chapitre 6)
67 Mecanique des milieux continus deformables, Chapitre 5
Hypothese sur les forces de contact
champ de surface directionnel :
F cont(x, ∂D) = T (x, n)
D
D
CCCCCCCCCCCCCCCCCCCCCCCCC
T(x, n)dS
D
n
T-T x
Fextcont (D) = Fcont (D) =
∫∫
∂D
T (x, n) dS
Mextcont(D) = Mcont(D) =
∫∫
∂D
x ∧ T (x, n) dS
Pextcont(D) =
∫∫
∂D
T (x, n) · U(x) dS
68 Mecanique des milieux continus deformables, Chapitre 5
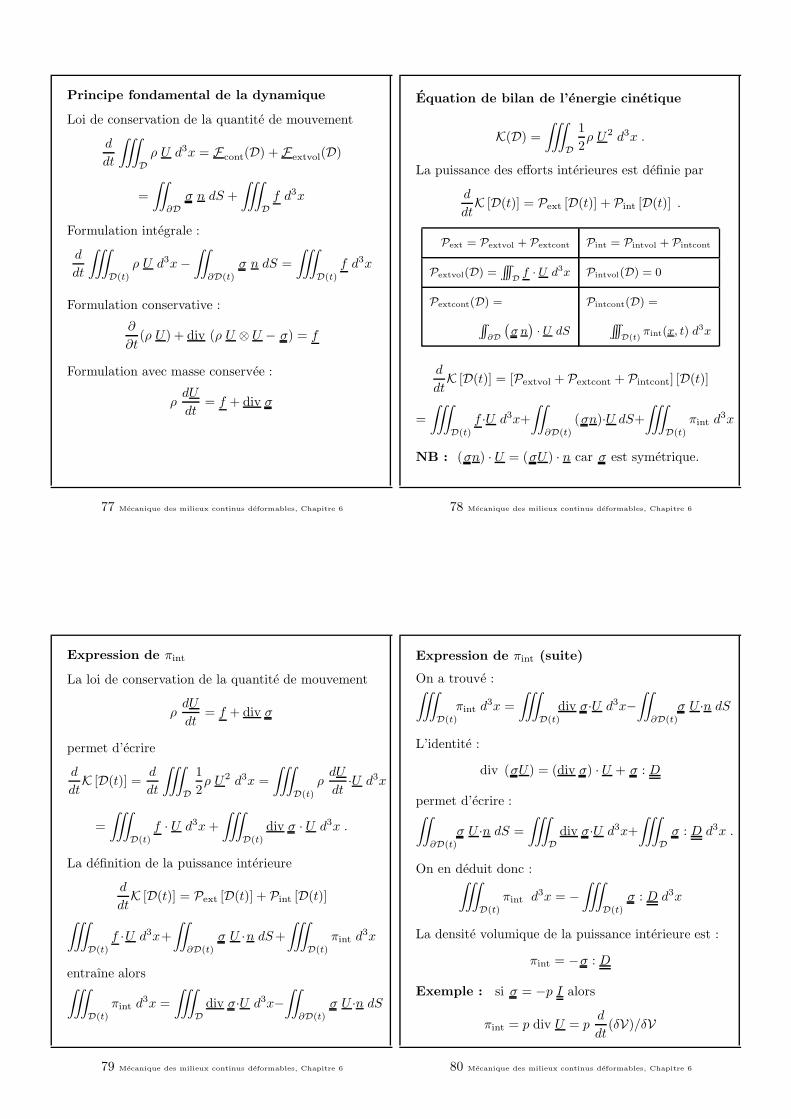
Tenseur des contraintes
On suppose que la resultante des forces de contact
Fcont(D) =
∫∫
∂D
T (x, n) dS
verifie “l’hypothese du continu”, i.e. tend vers zero
comme V(D) lorsque ce volume tend vers zero.
Le “theoreme des champs de surface directionnels”
(chapitre 4) entraıne alors la dependance lineaire
T (x, n) = σ(x) n
Ti (x, n) = σij (x) nj pour i = 1, ..., 3
e(1)e(2)
e(3) σ13
σ23
σ33
σ12σ22
σ32
T [x,e(3)]
T [x,e(1)]
T [x,e(2)]
e(1)
e(3)
e(2)
σ11
σ21
σ31x
69 Mecanique des milieux continus deformables, Chapitre 5
Densite volumique fcont
de la resultante des forces de contact definie par
Fextcont(D) = Fcont(D) =
∫∫
∂D
T (x, n) dS
=
∫∫
∂D
σ(x) n dS =
∫∫∫
D
fcont
(x) d3x
Theoreme de la divergence des tenseurs (chapitre 4) :
fcont
(x) = div σ(x)
Peut-on ecrire le tableau suivant ?
Fextcont(D) = Mextcont(D) = Pextcont(D) =
∫∫
∂DT (x, n) dS
∫∫
∂Dx ∧ T dS
∫∫
∂DT · U dS
∫∫
∂Dσ(x)n dS
∫∫
∂Dx ∧
(
σ n)
dS∫∫
∂D
(
σ n)
· U dS
∫∫∫
Df
cont(x) d3x
∫∫∫
Dx ∧ f
contd3x ?
∫∫∫
Df
cont· U d3x ??
70 Mecanique des milieux continus deformables, Chapitre 5
Symetrie du tenseur des contraintes
On a T (x, n) = σ(x)n et fcont
(x) = div σ(x)
Le tenseur σ(x) est symetrique si et seulement si∫∫
∂D
x ∧ T (x, n) dS =
∫∫∫
D
x ∧ fcont
(x) d3x
Demonstration :
∫∫
∂D
x ∧ [σ (x) n] dS =
∫∫∫
D
x ∧ [div σ (x)] d3x
∫∫
∂D
εijk xj σkl(x) nl dS =
∫∫∫
D
εijk xj
∂σkl
∂xl
(x) d3x
(theo. de la div.) =
∫∫∫
D
∂
∂xl
[εijk xj σkl (x)] d3x
d’ou∂
∂xl
[εijk xj σkl (x)] = εijk xj
∂σkl
∂xl
(x)
(derivation) = εijk δjl σkl (x) + εijk xj
∂σkl
∂xl
(x)
d’ou εijk δjl σkl (x) = εijk σkj (x) = 0
Pour i = 1, 2, 3 : σ23−σ32 = σ31−σ13 = σ12−σ21 = 0
71 Mecanique des milieux continus deformables, Chapitre 5
Expressions de Pextcont(D)
On a T (x, n) = σ(x)n et fcont
(x) = div σ(x)
∫∫
∂D
T ·U dS =
∫∫∫
D
fcont
·U d3x+
∫∫∫
D
σ : tK(x) d3x
ou A : B = tr (A B) = tr (B A) = Aij Bji
Dans le cas ou σ est symetrique :
Pextcont(D) =
∫∫∫
D
div σ · U d3x +
∫∫∫
D
σ : D d3x
Demonstration∫∫
∂D
T · U dS =
∫∫
∂D
(σ n) · U dS
=
∫∫
∂D
σij nj Ui dS =
∫∫∫
D
∂ (σij Ui)
∂xj
d3x
=
∫∫∫
D
∂σij
∂xj
Ui d3x +
∫∫∫
D
σij
∂ Ui
∂xj
d3x
=
∫∫∫
D
div σ · U d3x +
∫∫∫
D
σ : tK d3x
72 Mecanique des milieux continus deformables, Chapitre 5

Chapitre 6 : LOIS DE CONSERVATION
Soit D(t) transporte par le mouvement U(x, t)
Formulation integrale :
Une equation de bilan est la donnee de
c(x, t), Qc(x, t) et fc(x, t) tels que
d
dt
∫∫∫
D(t)
c d3x +
∫∫
∂D(t)
Qc· n dS =
∫∫∫
D(t)
fc d3x
Formulation conservative :
De maniere equivalente, on a
∫∫∫
D
∂c
∂td3x +
∫∫
∂D
(
c U + Qc
)
·n dS =
∫∫∫
D
fc d3x
et donc
∂c
∂t+ div
(
c U + Qc
)
= fc
73 Mecanique des milieux continus deformables, Chapitre 6
Loi de conservation de la masse
Formulation integrale :
d
dtm [D(t)] =
d
dt
∫∫∫
D(t)
ρ(x, t) d3x = 0
Pas de flux (Qρ
= 0)
Pas de production volumique (fρ = 0)
Formulation conservative :
∂ρ
∂t+ div (ρ U) = 0
Autres ecritures :
∂ρ
∂t+ U · grad ρ + ρ div U = 0
dρ
dt+ ρ div U = 0
74 Mecanique des milieux continus deformables, Chapitre 6
Equation de bilan (suite)
On pose c = ρ φ
d
dt
∫∫∫
D(t)
ρ φ d3x+
∫∫
∂D(t)
Qc·n dS =
∫∫∫
D(t)
fc d3x
Si la masse est conservee on a (Reynolds)∫∫∫
D(t)
ρdφ
dtd3x +
∫∫
∂D(t)
Qc· n dS =
∫∫∫
D(t)
fc d3x
Formulation avec masse conservee :
ρdφ
dt+ div Q
c= fc ,
Autre demonstration :
∂c
∂t+ div (c U) =
∂
∂t(ρ φ) + div (ρ φ U)
= ρ
(
∂φ
∂t+ U · grad φ
)
+
(
∂ρ
∂t+ div ρ U
)
φ
= ρdφ
dt
75 Mecanique des milieux continus deformables, Chapitre 6
Trois formulations d’une equation de bilan
Une equation de bilan est la donnee de[
c(x, t) = ρ(x, t) φ(x, t), Qc(x, t), fc(x, t)
]
et de l’une des formulations equivalentes :
Formulation integrale
d
dt
∫∫∫
D(t)
ρφ d3x +
∫∫
∂D(t)
Qc· n dS =
∫∫∫
D(t)
fc d3x
Formulation conservative
∂(ρ φ)
∂t+ div
(
ρ φ U + Qc
)
= fc
Formulation avec masse conservee
ρdφ
dt+ div Q
c= fc
76 Mecanique des milieux continus deformables, Chapitre 6
Principe fondamental de la dynamique
Loi de conservation de la quantite de mouvement
d
dt
∫∫∫
D
ρ U d3x = Fcont(D) + Fextvol(D)
=
∫∫
∂D
σ n dS +
∫∫∫
D
f d3x
Formulation integrale :
d
dt
∫∫∫
D(t)
ρ U d3x −∫∫
∂D(t)
σ n dS =
∫∫∫
D(t)
f d3x
Formulation conservative :
∂
∂t(ρ U) + div (ρ U ⊗ U − σ) = f
Formulation avec masse conservee :
ρdU
dt= f + div σ
77 Mecanique des milieux continus deformables, Chapitre 6
Equation de bilan de l’energie cinetique
K(D) =
∫∫∫
D
1
2ρ U2 d3x .
La puissance des efforts interieures est definie par
d
dtK [D(t)] = Pext [D(t)] + Pint [D(t)] .
Pext = Pextvol + Pextcont Pint = Pintvol + Pintcont
Pextvol(D) =∫∫∫
Df · U d3x Pintvol(D) = 0
Pextcont(D) = Pintcont(D) =
∫∫
∂D
(
σ n)
· U dS∫∫∫
D(t)πint(x, t) d3x
d
dtK [D(t)] = [Pextvol + Pextcont + Pintcont] [D(t)]
=
∫∫∫
D(t)
f ·U d3x+
∫∫
∂D(t)
(σn)·U dS+
∫∫∫
D(t)
πint d3x
NB : (σn) · U = (σU ) · n car σ est symetrique.
78 Mecanique des milieux continus deformables, Chapitre 6
Expression de πint
La loi de conservation de la quantite de mouvement
ρdU
dt= f + div σ
permet d’ecrire
d
dtK [D(t)] =
d
dt
∫∫∫
D
1
2ρ U2 d3x =
∫∫∫
D(t)
ρdU
dt·U d3x
=
∫∫∫
D(t)
f · U d3x +
∫∫∫
D(t)
div σ · U d3x .
La definition de la puissance interieure
d
dtK [D(t)] = Pext [D(t)] + Pint [D(t)]
∫∫∫
D(t)
f ·U d3x+
∫∫
∂D(t)
σ U ·n dS+
∫∫∫
D(t)
πint d3x
entraıne alors∫∫∫
D(t)
πint d3x =
∫∫∫
D
div σ·U d3x−∫∫
∂D(t)
σ U ·n dS
79 Mecanique des milieux continus deformables, Chapitre 6
Expression de πint (suite)
On a trouve :∫∫∫
D(t)
πint d3x =
∫∫∫
D(t)
div σ·U d3x−∫∫
∂D(t)
σ U ·n dS
L’identite :
div (σU) = (div σ) · U + σ : D
permet d’ecrire :∫∫
∂D(t)
σ U ·n dS =
∫∫∫
D
div σ·U d3x+
∫∫∫
D
σ : D d3x .
On en deduit donc :∫∫∫
D(t)
πint d3x = −∫∫∫
D(t)
σ : D d3x
La densite volumique de la puissance interieure est :
πint = −σ : D
Exemple : si σ = −p I alors
πint = p div U = pd
dt(δV)/δV
80 Mecanique des milieux continus deformables, Chapitre 6

Equation de bilan de l’energie cinetique
d
dtK [D(t)] = [Pextvol + Pextcont + Pintcont] [D(t)]
=
∫∫∫
D(t)
f ·U d3x+
∫∫
∂D(t)
σ n·U dS+
∫∫∫
D(t)
πint d3x
Formulation integrale
d
dt
∫∫∫
D(t)
1
2ρ U2 d3x −
∫∫
∂D(t)
(σ U) · n dS =
∫∫∫
D(t)
(
f · U − σ : D)
d3x
Formulation conservative
∂
∂t
(
1
2ρ U2
)
+div
(
1
2ρ U2 U − σ U
)
= f ·U − σ : D
Formulation avec masse conservee
ρd
dt
(
1
2U2
)
− div (σ U) = f · U − σ : D .
81 Mecanique des milieux continus deformables, Chapitre 6
Premier principe de la thermodynamique
Energie interne
Eint(D) =
∫∫∫
D
eint d3x =
∫∫∫
D
ρ e d3x
Energie totale
Etot(D) = K(D) + Eint(D) =
∫∫∫
D
ρ
(
1
2U2 + e
)
d3x
Premier principe
d
dtEtot [D(t)] = Pext [D(t)] + Pthe [D(t)]
Puissance thermique
Pthe [D(t)] = −∫∫
∂D(t)
Q(x, t)·n dS+
∫∫∫
D(t)
r(x, t) d3x
Puissance des efforts exterieurs
Pext [D(t)] =
∫∫
∂D(t)
σ U · n dS +
∫∫∫
D(t)
f · U d3x
82 Mecanique des milieux continus deformables, Chapitre 6
Loi de conservation de l’energie totale
d
dtEtot [D(t)] = Pext [D(t)] + Pthe [D(t)]
Formulation integrale
d
dt
∫∫∫
D(t)
(
1
2ρU2 + ρe
)
d3x
+
∫∫
∂D(t)
(
−σ U + Q)
·n dS =
∫∫∫
D(t)
(f ·U + r) d3x
Formulation conservative
∂
∂t
(
1
2ρ U2 + ρe
)
+div
(
1
2ρ U2 U + ρe U − σ U + Q
)
= f · U + r
Formulation avec masse conservee
ρd
dt
(
1
2U2 + e
)
+ div(
−σ U + Q)
= f · U + r
83 Mecanique des milieux continus deformables, Chapitre 6
Equation de bilan de l’energie interne
Premier principe de la thermodynamique
d
dtEtot =
d
dtEint +
d
dtK = Pext + Pthe
Definition de la puissance des efforts interieurs
d
dtK = Pext + Pint
Par soustraction :d
dtEint = Pthe − Pint
Formulation integrale
d
dt
∫∫∫
D(t)
ρ e d3x
+
∫∫
∂D(t)
Q · n dS =
∫∫∫
D(t)
(r + σ : D) d3x
Formulation conservative
∂
∂t(ρe) + div (ρe U + Q) = r + σ : D ,
Formulation avec masse conservee
ρd
dte + div Q = r + σ : D
84 Mecanique des milieux continus deformables, Chapitre 6

Recapitulatif des equations de bilan
d
dt
∫∫∫
D(t)
c d3x +
∫∫
∂D(t)
Qc· n dS =
∫∫∫
D(t)
fc d3x
Grandeur Densite Flux Production
C [D(t)] c Qc
fc
m [D(t)] ρ 0 0
p [D(t)] ρ U −σ f
Eint [D(t)] ρ e Q r + σ : D
K [D(t)] 12ρU2 −σ U f · U − σ : D
Etot [D(t)] 12ρU2 + ρ e −σ U + Q f · U + r
(Eint, K) : equations de bilan
(m, p, Etot) : lois de conservation
85 Mecanique des milieux continus deformables, Chapitre 6
Equations du mouvement
1) Loi de conservation de la masse
∂ρ
∂t+ U · grad ρ = −ρ div U
2) Loi de conservation de la quantite de mouvement
ρ
(
∂U
∂t+ U · grad U
)
= f + div σ
3) Equation de bilan de l’energie interne
ρ
(
∂e
∂t+ U · grad e
)
= r − div Q + σ : D
4) Conditions aux limites et conditions initiales
5) Lois d’etat
p = P(ρ, e) et e = E(ρ, T )
6) Lois de comportement
Thermique : Q ? Rheologique : σ ?
86 Mecanique des milieux continus deformables, Chapitre 6
Loi de comportement thermique
Loi de Fourier :
Q = Q(T ) = −k grad T
Exemple : equation de la chaleur stationnaire
Equation de bilan de l’energie interne
ρ
(
∂e
∂t+ U · grad e
)
= r − div Q + σ : D
Si U = 0 (repos) et∂e
∂t= 0 (stationnaire) on a
div Q(x) = r(x) pour x ∈ Ω
Conditions aux limites :
Q(x) · n = qlimit(x, ∂Ω) pour x ∈ ∂Ω
On en deduit
−k ∆T (x) = r(x) pour x ∈ Ω
avec − k∂T
∂n(x) = qlimit(x, ∂Ω) pour x ∈ ∂Ω
87 Mecanique des milieux continus deformables, Chapitre 6
Lois de comportement rheologiques
Chapitre 7 : materiaux elastiques
σ = Gelast
(ǫ) ,
tenseur des petites deformations :
ǫ =1
2
(
∂ξi
∂aj
+∂ξj
∂ai
)
champ de deplacement (Ω0 non contraint) :
ξ(a) = X(a) − a
Chapitre 8 : milieux fluides
σ = Gfluide(p, D) ,
tenseur des taux de deformation
D =1
2
(
∂U i
∂xj
+∂U j
∂xi
)
pression thermodynamique (loi d’etat)
p = P(ρ, e)
88 Mecanique des milieux continus deformables, Chapitre 6

Cplts : lois de conservation et discontinuites
D(a)
D(b)
D(b)
D(a)
ΣΩ
W
U
n(a)
n(b)
W
U
Forme integrale de l’equation de bilan :
d
dtC [D(t)] −Fflux [D(t)] = Fvolum [D(t)]
Modelisation du terme de flux :
d
dt
∫∫∫
D(t)
c d3x +
∫∫
∂D(t)
Qc· n dS
+
∫∫
Σ(t)∩D(t)
Qc
· n dS =
∫∫∫
D(t)
fc d3x
En explicitantd
dt
∫∫∫
D(t)
c d3x (chapitre 3) :
∂c
∂t+ div
(
c U + Qc
)
= fc pour x ∈ Ω(t) − Σ(t)
c (U − W ) + Qc
· n = 0 pour x ∈ Σ(t)
89 Mecanique des milieux continus deformables, Chapitre 6
Cplts : 2nd principe de la thermodynamique
d
dt
∫∫∫
D(t)
ρ s d3x ≥ −∫∫
∂D(t)
Q
T·n dS+
∫∫∫
D(t)
r
Td3x
Taux de production d’entropie irreversible I [D(t)] :
LHS − RHS = I [D(t)] =
∫∫∫
D(t)
i(x, t) d3x ≥ 0
Equation de bilan de l’entropie :
ρds
dt+ div
(
Q
T
)
=r
T+ i avec i(x, t) ≥ 0
Puissances reversibles : thermique et efforts internes :
d
dtEint [D(t)] = P(rev)
the [D(t)] − P(rev)int [D(t)]
= Pthe [D(t)] − Pint [D(t)]
Thermodynamique :
P(rev)the [D(t)] =
∫∫∫
D(t)
ρ Tds
dtd3x
Modelisation :
P(rev)int [D(t)] =
∫∫∫
D(t)
π(rev)int d3x
90 Mecanique des milieux continus deformables, Chapitre 6
Second principe (suite)
La definition des puissance reversibles s’ecrit
P(rev)the [D(t)] − P(rev)
int [D(t)] = Pthe [D(t)] − Pint [D(t)]
=⇒ ρ Tds
dt− π
(rev)int = −div Q + r + σ : D
La formulation du second principe s’ecrit
ρds
dt+ div (
Q
T) =
r
T+ i avec i(x, t) ≥ 0
On en deduit (quelques calculs) :
i = −grad T · Q
T 2+
σ : D
T+
π(rev)int
T
Puissance reversible pour les fluides :
π(rev)int = ρ p
d
dt
(
1
ρ
)
= p div U
Puissance reversible pour les solides elastiques :
π(rev)int = −1
2
d
dt
(
σ : ǫ)
Consequences : k > 0, κe > 0, ν ∈ [−1, 1/2], etc.
91 Mecanique des milieux continus deformables, Chapitre 6
Chapitre 7 : ELASTICITE LINEAIRE
x’
x
a
a’
e(1)e(2)
e(3)ξ ’ ( a’ )
δxδa
ξ ( a )
Champ de deplacement : ξ
X(a) = a + ξ(a)
Le champ de deplacement ξ(a) = ξ(L)(a) est toujours
decrit dans sa representation lagrangienne.
Dans ce chapitre, les operateurs differentiels
grad , grad , div , div , rot et ∆
portent sur la variable a.
Ω0 est la configuration de reference.
92 Mecanique des milieux continus deformables, Chapitre 7

Gradient du champ de deplacement : H
x’
x
a
a’
e(1)e(2)
e(3)ξ ’ ( a’ )
δxδa
ξ ( a )
ξ(a + δa) = ξ(a) + H(a)δa + O[(δa)2]
La matrice H(a) a pour composantes
Hij(a) =∂ξi
∂aj
(a)
Si x = X(a), x′ = X(a′), δa = a′ − a, δx = x′ − x :
δx − δa = ξ(a′) − ξ(a) = H(a) · δa + O[(δa)2]
La definition X(a) = a + ξ(a) entraıne
F (a) = I + H(a)
93 Mecanique des milieux continus deformables, Chapitre 7
H(a) = ǫ(a) + φ(a)
Composante symetrique du gradient : ǫ
ǫ =1
2(H +tH)
ǫij(a) =1
2
[
∂ξi
∂aj
(a) +∂ξj
∂ai
(a)
]
Produit scalaire : tδa′ ǫ(a) δa = δa′i ǫij(a) δaj
Composante antisymetrique du gradient : φ
φ =1
2(H −tH)
φij(a) =1
2
[
∂ξi
∂aj
(a) − ∂ξj
∂ai
(a)
]
Vecteur φ : φ(a) δa = φ(a) ∧ δa
94 Mecanique des milieux continus deformables, Chapitre 7
Hypothese des petites deformations
Petits deplacements :
Longueur caracteristique lcar donnee
ηdep = Supa∈Ω0
‖ξ(a)‖lcar
≪ 1
Petites deformations :
ηdef = Supa∈Ω0‖H(a)‖ ≪ 1
Representations des champs peu deformes :
Longueur caracteristique definie par
l−1B = Supx∈Ω
‖grad B(E)(x)‖∣
∣B(E)(x)∣
∣
ηB = Supa∈Ω0
‖ξ(a)‖lB
≪ 1
Hypothese des Petites Pertubations :
ηdep ≪ 1, ηdef ≪ 1 et ηB ≪ 1
95 Mecanique des milieux continus deformables, Chapitre 7
Tenseur des petites deformations : ǫ
Comme F = I + H , on peut ecrire
C =t F F = (I +tH) (I + H) = I +tH + H +tH H
Hypothese des petites deformations :
H = O(η) avec η ≪ 1
On a donc
C = I + 2 ǫ + O(η2)
ou le tenseur des petites deformations est
ǫ =1
2(tH + H)
NB : le tenseur des (grandes) deformations de
Green-Lagrange L est defini par C = I + 2 L.
Dans le cadre des petites deformations, on a donc
L = ǫ + O(η2)
96 Mecanique des milieux continus deformables, Chapitre 7

Allongement relatif : ∆(a; δa)
x’
x
a
a’
e(1)e(2)
e(3)ξ ’ ( a’ )
δxδa
ξ ( a )
Petit vecteur δa = a′ − a dont l’image est le petit
vecteur δx = x′ − x = X(a′) − X(a)
Allongement relatif en a dans la direction δa :
∆(a; δa) =‖δx‖ − ‖δa‖
‖δa‖
Comme C = I + 2ǫ + O(η2), on a
‖δx‖ =√
tδaCδa =√
‖δa‖2 + 2 tδa ǫ δa + O(η2)
D’ou‖δx‖‖δa‖ = 1 +
tδa ǫ δa
‖δa‖2+ O(η2)
A l’ordre dominant en η, on a donc
∆(a; δa) ∼tδa ǫ(a) δa
‖δa‖2
97 Mecanique des milieux continus deformables, Chapitre 7
Glissement des vecteurs orthogonaux
x’ δx
x
a
a’
δa
X
F e(1)e(2)
e(3)
a’’δx’x’’
δa’
θ
γ
L’angle de glissement en a des petits vecteurs δa et
δa′ orthogonaux est γ(a; δa, δa′) defini par
sin γ(a; δa, δa′) =tδa C(a) δa′
√
tδa C(a) δa√
tδa′ C(a) δa′
Comme C = I + 2ǫ + O(η2), on a
sin γ(a; δa, δa′) = 2tδa′ ǫ(a) δa
‖δa‖‖δa′‖ + O(η2)
En approximant le sinus par l’angle, on en deduit
γ(a; δa, δa′) ∼ 2tδa′ ǫ(a) δa
‖δa‖‖δa′‖ = 2δa′
i ǫij δaj√δanδan
√
δa′mδa′
m
98 Mecanique des milieux continus deformables, Chapitre 7
Deformation de la base canonique
a
δa(3) ε22 δa
δa(2)
δx(3)
δx(2)
γ23=ε23
Base orthonormale δa(1), δa(2), δa(3) ou
δa(i) = δa e(i)
On considere les images δx(1), δx(2), δx(3) avec
δx(i) = F (a)δa(i) =[
I + H(a)]
δa(i)
Pour le petit vecteur δa(1) = δae(1), on peut ecrire
∆(a; δa(1)) =tδa(1)ǫ(a)δa(1)
‖δa(1)‖2= ǫ11
En notant γij = γ(a; δa(i), δa(j)), on a
γij ∼ 2tδa(i) ǫ(a) δa(j)
‖δa‖2= 2 ǫij
99 Mecanique des milieux continus deformables, Chapitre 7
Transport des volumes
Base orthonormale δa(1), δa(2), δa(3) de volume
δV0 = δa3
Le volume du parallelepipede δx(1), δx(2), δx(3) est
δV =∣
∣
∣
(
δx(1), δx(2), δx(3))∣
∣
∣
∼ ‖δx(1)‖ ‖δx(2)‖ ‖δx(3)‖
Comme ‖δx(1)‖ ∼ δa(1 + ǫ11), etc..., on a
δV = (δa)3(1 + ǫ11)(1 + ǫ22)(1 + ǫ33)
∼ (δa)3(1 + ǫ11 + ǫ22 + ǫ33) = δV0(1 + tr ǫ)
Un petit volume de forme quelconque δV0 en a est
deforme en un petit volume δV tel que
δV − δV0
δV0∼ tr [ǫ(a)] = div ξ(a)
NB : on a δV = δV0 J(a) pour les grandes
deformations. On a fait ici le developpement
J(a) = 1 + tr [ǫ(a)] + O(η2)
100 Mecanique des milieux continus deformables, Chapitre 7

Loi de Hooke generalisee
Hypothese des Petites Perturbations
Petites deformations H(a) ≪ 1 et champs peu
deformes B(E)(x) = B(L)(a) = B(a).
Comportement elastique (mce)
Le tenseur des contraintes σ = Gmce
X ne depend
que de la deformation.
Principe de localisation spatiale (pls)
Le tenseur des contraintes σ(a) = Gpls
[
F (a)]
ne
depend que des derivees premieres ∂Xi
∂aj(a).
Principe de l’indifference materielle (pim)
L’invariance du comportement par changement de
referentiel entraıne σ(a) = Gpim
[
ǫ(a)]
.
Principe de superposition
La relation σ(a) = Gelast
[
ǫ(a)]
est lineaire.
La loi de Hooke generalisee s’ecrit donc :
σij(a) = Cijkl(a) ǫkl(a) .
101 Mecanique des milieux continus deformables, Chapitre 7
Comportement homogene et isotrope
Si le comportement elastique est homogene, les 81
(ou 36) champs Cijkl(a) sont independants de a.
Si le comportement est isotrope, le comportement est
donnee par la loi de Hooke
σ = λ tr (ǫ) I + 2µ ǫ
ou λ et µ sont les 2 coefficients d’elasticite de Lame.
Demonstration :
Les invariants polynomiaux de ǫ sont tr (ǫ), ǫ : ǫ,
det (ǫ) et toutes les fonctions de ces trois invariants.
La quantite (on demontre que c’est l’energie interne)
Φ[
ǫ(a)]
= 12 σ(a) : ǫ = 1
2 Cijkl(a) ǫkl(a) ǫij(a)
doit etre invariant polynomial de ǫ(a).
Comme Φ est une fonction quadratique de ǫ, on a
Φ(ǫ) =1
2λ [tr (ǫ)]2 + µ ǫ : ǫ
En utilisant la relation σij =∂Φ(ǫ)
∂ǫij, on a
σij(a) = λ ǫkk(a) δij + 2µ ǫij(a)
102 Mecanique des milieux continus deformables, Chapitre 7
Module d’Young et coefficient de Poisson
La loi de Hooke
σ = λ tr (ǫ) I + 2µ ǫ
s’inverse en
ǫ = − ν
Etr (σ) I +
1 + ν
Eσ
Les coefficients de Lame λ et µ s’ecrivent
λ =ν E
(1 + ν) (1 − 2ν)et µ =
E
2(1 + ν)
avec E module d’Young et ν coefficient de Poisson :
E =(3 λ + 2 µ ) µ
(λ + µ )et ν =
λ
2 (λ + µ )
Demonstration : en projettant ces relations sur
leur parties speriques (1/3 trace multipliee par I) et
deviatoriques (tenseur de trace nulle).
NB : le module de compression elastique κe s’ecrit
κe = λ +2
3µ =
E
3 (1 − 2 ν)
103 Mecanique des milieux continus deformables, Chapitre 7
Equations de Lame
Loi de conservation de la masse
Comme J(a, t) = 1 + O(η), la loi de conservation de
la masse J(a, t) ρ(a, t) = ρ0 entraıne ρ(a, t) ∼ ρ0.
Conservation de la quantite de mouvement
ρ0
∂2ξ
∂t2(a, t) = f(a, t) + div σ(a, t)
Comme σ(a, t) = λ tr (ǫ) I + 2 µ ǫ, on a
div σ = λ grad(
tr ǫ)
+ 2 µ div ǫ
= (λ + µ ) grad(
div ξ)
+ µ ∆ξ
Conditions aux limites
en contraintes (Neumann) :
σ(a, t)n = F cont(a, t, ∂Ω0) pour a ∈ ∂Ω0
en deplacement (Dirichlet) :
ξ(a, t) = ξlimit
(a, t) pour a ∈ ∂Ω0
104 Mecanique des milieux continus deformables, Chapitre 7

Chapitre 8 : MECANIQUE DES FLUIDES
Loi de Fourier
Q = −k grad T
Fluides parfaits
σ = Gparfait
(p) = −p I
Fluides newtoniens
σ = Gvisq
(p, D) = −p I + τ (D)
Tenseur des contraintes visqueuses :
τ (D) = λn tr (D) I + 2 µn D
Loi d’etat pour la pression
1)Fluides compressibles : p = P(ρ, e)
la pression est une grandeur thermodynamique
2) Fluides incompressibles : div U = 0
la pression n’est plus une grandeur thermodynamique !
105 Mecanique des milieux continus deformables, Chapitre 8
Fluides parfaits
σ = −p I
Equations d’Euler :
dρ
dt= −ρ div U
ρdU
dt= −grad p + f
ρde
dt= r + k∆T − p div U
Conditions aux limites
U(x, t) · n = Ulimit(x, t, ∂Ω) pour x ∈ ∂Ω(t)
Fluides parfaits compressibles
Lois d’etat : p = P(ρ, e) et e = E(ρ, T )
106 Mecanique des milieux continus deformables, Chapitre 8
Fluides parfaits incompressibles
div U(x, t) = 0 ,
ρ
p
c 2 infinic 2 =
d p
dρ
ρ
p
ρ0
p0
ρ0
p
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
div U = 0
ρ0dU
dt= −grad p + f
La pression n’est plus une grandeur thermodynamique
C’est un “multiplicateur de Lagrange”
associe a la contrainte d’incompressibilite
Decouplage avec l’energie interne
ρde
dt= r + k ∆T
107 Mecanique des milieux continus deformables, Chapitre 8
Lois de conservation des fluides parfaits
d
dt
∫∫∫
D(t)
c d3x +
∫∫
∂D(t)
Qc· n dS =
∫∫∫
D(t)
fc d3x
Grandeur Densite Flux Production
C [D(t)] c Qc
fc
m [D(t)] ρ 0 0
p [D(t)] ρ U pI f
Eint [D(t)] ρ e −k grad T r − p div U
K [D(t)] 12ρ U2 p U f · U + p div U
Etot [D(t)] 12ρ U2 + ρ e pU − k grad T f · U + r
Pint(D) =
∫∫∫
D
p div U d3x
108 Mecanique des milieux continus deformables, Chapitre 8
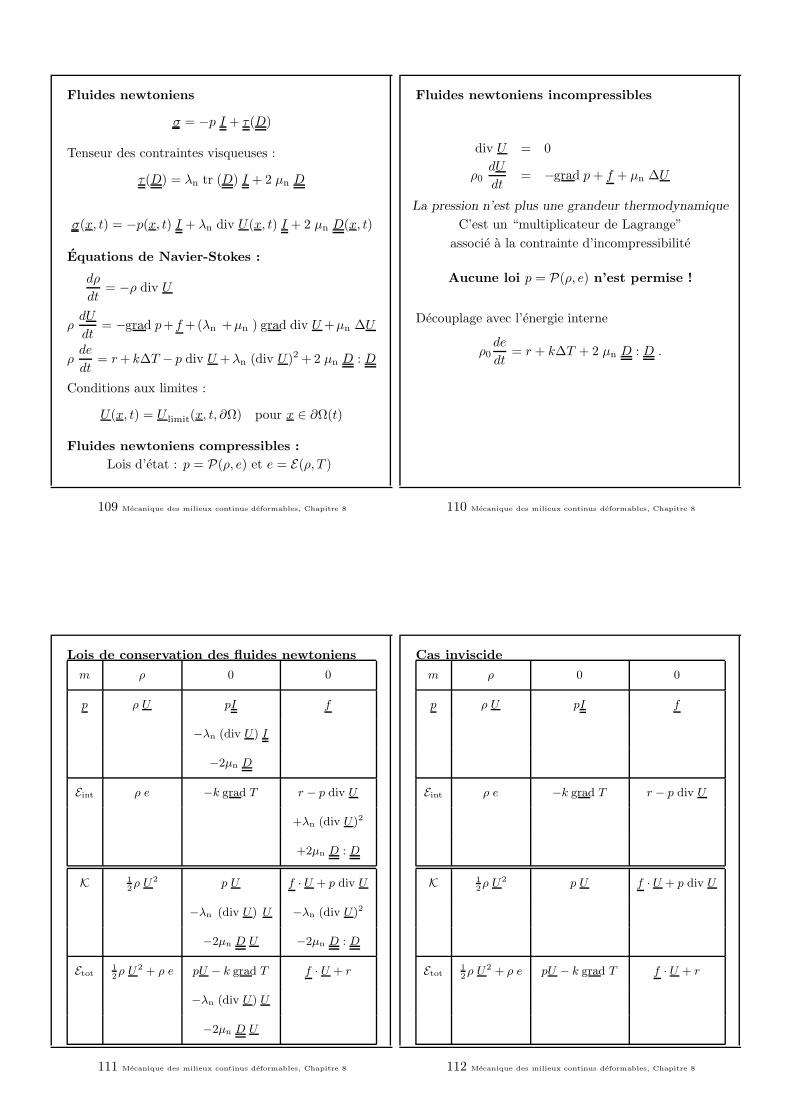
Fluides newtoniens
σ = −p I + τ (D)
Tenseur des contraintes visqueuses :
τ (D) = λn tr (D) I + 2 µn D
σ(x, t) = −p(x, t) I + λn div U(x, t) I + 2 µn D(x, t)
Equations de Navier-Stokes :
dρ
dt= −ρ div U
ρdU
dt= −grad p+f +(λn +µn ) grad div U +µn ∆U
ρde
dt= r + k∆T − p div U + λn (div U)2 + 2 µn D : D
Conditions aux limites :
U(x, t) = U limit(x, t, ∂Ω) pour x ∈ ∂Ω(t)
Fluides newtoniens compressibles :
Lois d’etat : p = P(ρ, e) et e = E(ρ, T )
109 Mecanique des milieux continus deformables, Chapitre 8
Fluides newtoniens incompressibles
div U = 0
ρ0dU
dt= −grad p + f + µn ∆U
La pression n’est plus une grandeur thermodynamique
C’est un “multiplicateur de Lagrange”
associe a la contrainte d’incompressibilite
Aucune loi p = P(ρ, e) n’est permise !
Decouplage avec l’energie interne
ρ0de
dt= r + k∆T + 2 µn D : D .
110 Mecanique des milieux continus deformables, Chapitre 8
Lois de conservation des fluides newtoniens
m ρ 0 0
p ρ U pI f
−λn (div U) I
−2µn D
Eint ρ e −k grad T r − p div U
+λn (div U)2
+2µn D : D
K 12ρ U2 p U f · U + p div U
−λn (div U) U −λn (div U)2
−2µn D U −2µn D : D
Etot12ρ U2 + ρ e pU − k grad T f · U + r
−λn (div U) U
−2µn D U
111 Mecanique des milieux continus deformables, Chapitre 8
Cas inviscide
m ρ 0 0
p ρ U pI f
Eint ρ e −k grad T r − p div U
K 12ρ U2 p U f · U + p div U
Etot12ρ U2 + ρ e pU − k grad T f · U + r
112 Mecanique des milieux continus deformables, Chapitre 8
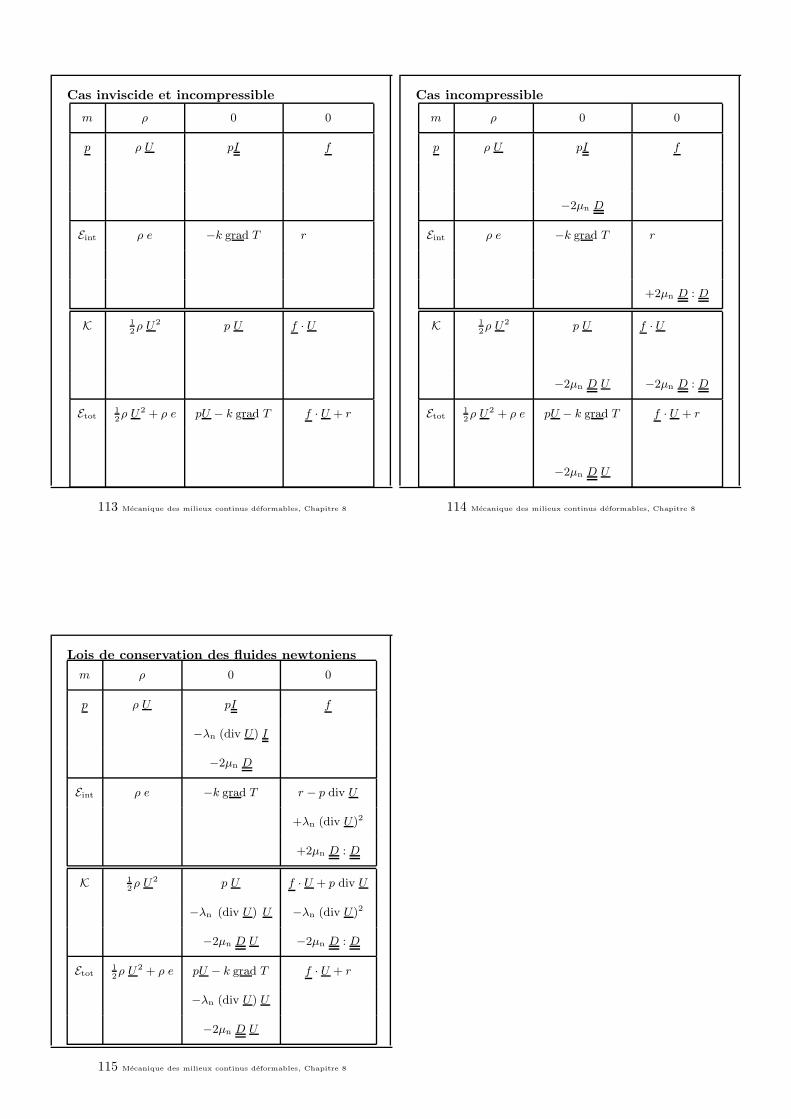
Cas inviscide et incompressible
m ρ 0 0
p ρ U pI f
Eint ρ e −k grad T r
K 12ρ U2 p U f · U
Etot12ρ U2 + ρ e pU − k grad T f · U + r
113 Mecanique des milieux continus deformables, Chapitre 8
Cas incompressible
m ρ 0 0
p ρ U pI f
−2µn D
Eint ρ e −k grad T r
+2µn D : D
K 12ρ U2 p U f · U
−2µn D U −2µn D : D
Etot12ρ U2 + ρ e pU − k grad T f · U + r
−2µn D U
114 Mecanique des milieux continus deformables, Chapitre 8
Lois de conservation des fluides newtoniens
m ρ 0 0
p ρ U pI f
−λn (div U) I
−2µn D
Eint ρ e −k grad T r − p div U
+λn (div U)2
+2µn D : D
K 12ρ U2 p U f · U + p div U
−λn (div U) U −λn (div U)2
−2µn D U −2µn D : D
Etot12ρ U2 + ρ e pU − k grad T f · U + r
−λn (div U) U
−2µn D U
115 Mecanique des milieux continus deformables, Chapitre 8



![Loi de comportement (en 2D) pour la liaison acier–[] · 2013. 6. 26. · Code_Aster Version default Titre : Loi de comportement (en 2D) pour la liaison acier–[...] Date : 09/02/2011](https://img.pdfslide.fr/doc/110x75/6018a6fc756a364df535d79f/loi-de-comportement-en-2d-pour-la-liaison-aciera-2013-6-26-codeaster.jpg)







![SSND101 – Loi de comportement visqueux pour des él[] · L’amortisseur visqueux est représenté par ... Modèle rhéologique de l’amortisseur visqueux. Les valeurs des différentes](https://img.pdfslide.fr/doc/110x75/5b98ef1109d3f219118d0164/ssnd101-loi-de-comportement-visqueux-pour-des-el-lamortisseur-visqueux.jpg)



![Loi de comportement de plaques en béton armé GLRC [] · 2015-08-04 · Code_Aster Version default Titre : Loi de comportement de plaques en béton armé GLRC_[...] Date : 23/04/2012](https://img.pdfslide.fr/doc/110x75/5f05f7847e708231d4159f26/loi-de-comportement-de-plaques-en-bton-arm-glrc-2015-08-04-codeaster-version.jpg)









![Loi de comportement de plaques en béton armé GLRC []](https://img.pdfslide.fr/doc/110x75/62b214e79efca954b134ae1f/loi-de-comportement-de-plaques-en-bton-arm-glrc-.jpg)