Embed Size (px)
Citation preview
Prise d'informations visuelles par un automobilistevirtuel dans une simulation de tra�c routier
Thierry LALANDE
31 janvier 2006

Table des matières
Résumé 2
Introduction 3
1 Problématique : simulation d'un tra�c routier 41.1 Mécanique des �uides . . . . . . . . . . . . . . . . . . . . . . 51.2 Approche individu-centrée . . . . . . . . . . . . . . . . . . . . 5
2 Prise d'informations visuelles chez l'humain 82.1 Mécanismes biologiques de la vue . . . . . . . . . . . . . . . . 8
2.1.1 Structure de l'÷il . . . . . . . . . . . . . . . . . . . . . 92.1.2 Reconstruction de l'image . . . . . . . . . . . . . . . . 9
2.2 Approche connexionniste . . . . . . . . . . . . . . . . . . . . . 102.3 Approche cognitiviste . . . . . . . . . . . . . . . . . . . . . . 11
3 Modélisation du comportement visuel humain 123.1 Méthodes bottom-up . . . . . . . . . . . . . . . . . . . . . . . 133.2 Méthodes top-down . . . . . . . . . . . . . . . . . . . . . . . . 143.3 Approches hybrides . . . . . . . . . . . . . . . . . . . . . . . . 16
Conclusion/Perspective 18
Bibliographie 19
1

Résumé
Dresser un état de l'art aussi exhaustif que possible dans un domainetel que la simulation utilisant les techniques de la réalité virtuelle est unetâche ardue à plus d'un titre, tant les études se sont multipliées sur ce thème[17, 7, 10, 18, 8]. Il faut dire que la réalité virtuelle o�re de nouvelles pers-pectives, notamment grâce au développement de nouveaux dispositifs visantà immerger les utilisateurs dans un monde recréé 1.
Parmi les applications de la réalité virtuelle, on retrouve des probléma-tiques telles que la modélisation des phénomènes physiques ou biologiques,la simulation du comportement animal ou encore la simulation de l'humain,de son comportement et de certaines de ses activités, parmi lesquelles laconduite. A travers cette étude, nous nous intéressons à cette applicationde simulation d'un conducteur humain, principalement du point de vue dela perception sensorielle à la base des décisions et actions humaines. Cetteperception sensorielle étant dans le cadre de la conduite, quasi-totalementvisuelle, une large partie des travaux est consacrée à la modélisation de lavue, de la focalisation du regard, selon des approches soit connexionnistes,soit cognitives, et parfois hybrides.
La modélisation et la simulation du comportement du conducteur humainpasse donc par cette dé�nition d'une méthode visant à o�rir aux agents dumodèle des moyens de perception les plus proches possible de ceux que leshumains utilisent. L'objectif est de réaliser une simulation de tra�c routier laplus réaliste possible, dans laquelle chaque agent réagit de façon autonome.
1. Un monde virtuel n'a pas la prétention de reconstituer le monde réel avec toutes sescontraintes et tous ses paramètres, ce qui de toute façon serait irréalisable en pratique.
2
Introduction
La problématique de la simulation du tra�c routier trouve un nouveauterrain d'expansion grâce à la réalité virtuelle et à ses apports en terme d'in-terfaçage avec l'humain. Jusqu'à récemment, les �ux de véhicules circulantsur les routes étaient assimilés à des �ux de particules obéissant aux loisde la mécanique des �uides [2]. Cette approche, toujours d'actualité, peutse révéler particulièrement e�cace lorsqu'on s'intéresse au tra�c dans sonensemble, puisqu'elle béné�cie du formalisme qui découle des applicationsmathématiques. Cependant, la réalité virtuelle o�re aux chercheurs un pointde vue nouveau sur le problème, en permettant non plus de simuler des �ux,mais chaque véhicule indépendamment des autres. Cette approche individu-centrée permet d'observer de plus près les comportements des véhicules 2.
Le comportement des automobilistes dans le monde réel découle d'unedécision prise à partir de ce qui a été perçu par l'individu. Dans cette étude,c'est cette perception qui va nous intéresser plus particulièrement : commentreprésenter la prise d'informations, essentiellement visuelles [19], dans notremodèle virtuel de simulation de tra�c routier? Il en va de la crédibilité dumodèle : le tra�c généré dans la simulation sera d'autant plus crédible queles véhicules seront nombreux et autonomes.
A ce propos, deux aspects sont à distinguer :Animation : l'outil de simulation doit être développé a�n de fournir à l'uti-
lisateur un environnement crédible dans lequel il puisse s'intégrer etréagir en présence d'agents autonomes.
Simulation : Les conducteurs virtuels doivent prendre des décisions en touteautonomie pour que des phénomènes émergents puissent être observéset étudiés.
La première partie de ce document concernera les deux approches no-tées précédemment, à savoir l'approche mécanique des �uides et l'approcheindividu-centrée. Dans un second temps, nous étudierons les moyens de per-ception dont disposent les humains, et les points de vue quant à la focalisationde l'attention. Nous �nirons par une analyse de la problématique de modéli-sation et de simulation du comportemnent des automobilistes humains dansle virtuel.
2. On entend par véhicule le couple formé par l'automobiliste et son véhicule.
3

Chapitre 1
Problématique : simulationd'un tra�c routier
Avant de nous intéresser à la perception visuelle chez le conducteur hu-main, nous allons tenter d'identi�er le besoin à l'origine de la simulation detra�c routier. Alors que le nombre de véhicules en circulation à travers lemonde n'a de cesse d'augmenter, l'actualité nous renvoie chaque jour desimages de congestion, d'accidents ou de pollution liés à cet accroissementdes �ux dans les moyens de transport.
Il est rapidement apparu comme une nécessité de simuler d'une manièreaussi réaliste et performante que possible les �ux des véhicules, a�n de prédireles risques ou les conséquences induites par la forme et la taille des routes, lepositionnement d'un dispositif de signalisation au niveau d'un carrefour, etc.Cependant, comment simuler un tra�c routier avec les technologies à notredisposition à ce jour?
Une première approche consiste à concevoir un modèle des �ux assimilantles véhicules à des entités d'ordre moléculaire, ce qui permet d'y appliquer leslois de la mécanique des �uides. l'avantage évident d'une telle modélisationréside dans le formalisme qui en découle, puisque la mécanique des �uides faitappel à des notions de mathématiques, et béné�cie du déterminisme inhérentà la résolution de systèmes tels que les équations di�érentielles. Pourtant,cette approche aussi précise soit-elle reste limitée en terme de granularité :les véhicules n'y sont pas vus indépendamment les uns des autres, maiscomme un tout.
Pour pallier aux manques mis en évidence dans l'approche mathéma-tique de la mécanique des �uides, il fallait trouver un moyen de descendre àun niveau de granularité plus �n, microscopique, et s'intéresser directementaux véhicules. Ceci est possible par l'utilisation des modèles et méthodes dela réalité virtuelle. En considérant chaque véhicule comme un agent jouis-sant d'une autonomie totale de perception, de décision et d'action, il estalors à notre portée d'étudier directement le comportement de ces agents,
4
qui �nalement reproduisent plus ou moins �dèlement le comportement desconducteurs humains. Cette simulation plus �ne des comportements des au-tomobilistes dans le virtuel n'est cependant pas le seul progrès proposé parles modélisations de ce type. Un grand intérêt de la réalité virtuelle est depermettre aux conducteurs virtuels d'in�uencer le comportement des utilisa-teurs immergés dans le monde virtuel, et vice-versa. Cette approche individu-centrée o�re ainsi des perspectives fort intéressantes pour des applicationstelles que l'apprentissage de la conduite en environnement virtuel.
1.1 Mécanique des �uides
Observés depuis le ciel d'aussi près qu'un scienti�que peut observer unecoupe au microscope, les �ux des véhicules sur les autoroutes ou dans lesrues d'une ville apparaissent comme un ensemble de particules composantun �uide. Ce constat a invité la communauté scienti�que et en particulierphysiciens et mathématiciens à proposer une modélisation du tra�c routierutilisant les lois de la mécanique des �uides, moyennant quelques adaptationsvisant à obtenir un comportement global proche de la réalité. La principaleadaptation proposée par A. Aw et M. Rascle [2] vise à ajouter une propriétéd'anisotropie aux particules représentant les véhicules : les véhicules ne ré-agissent qu'aux stimuli provenant de face.
L'intérêt de cette méthode est évident pour ce qui concerne une approchemacroscopique, puisqu'elle permet de pro�ter de tout le formalisme issu desmathématiques. La simulation de tra�c routier revient alors à résoudre uneou plusieurs équations di�érentielles [11].
Aussi réaliste soit-il, ce comportement global simulé à l'aide d'équationset de lois physiques ne permet pas d'atteindre un niveau de granularité su�-samment �n pour être comparable au comportement individuel des conduc-teurs humains. De ce fait, il est nécessaire d'explorer d'autres méthodes vi-sant à étudier les �ux du tra�c routier à un niveau microscopique, i.e. àl'échelle humaine.
1.2 Approche individu-centrée
Suivant un mode de représentation très di�érent de ce qui était proposépar les partisans de la mécanique des �uides, l'approche individu-centrées'intéresse, comme son nom l'indique, à l'individu au c÷ur de la simula-tion. Cette vision microscopique permet de modéliser plus �nement ce quise produit dans un tra�c routier, et de provoquer certaines situations qui nepourraient être décrites dans une vision macroscopique.
La notion d'agents autonomes [21] est à la base des simulations individu-centrées en réalité virtuelle. Les agents composant le modèle sont conçuspour obéir au même principe de fonctionnement que l'humain, pour ce qui
5
concerne sa capacité de prise de décision, en intégrant la boucle décisionnellereprésentée dans cette �gure :
Fig. 1.1 � Boucle Perception - Décision - Action
Analysons les paradigmes de base des systèmes multi-agents que sont�nalement ces modélisations individu-centrées, en particulier en simulationde tra�c routier.
� Perception : la perception est un terme particulièrement vague, puis-qu'il regroupe tout ce qui concerne la problématique de prise de connais-sance de son environnement par une entité dans le monde virtuel. Dansle cadre de la simulation routière, nous verrons que la principale sourced'informations pour les conducteurs réels et virtuels est d'ordre visuelle[19].
� Décision : les agents de la simulation doivent disposer d'une autonomiedécisionnelle totale pour être plus réaliste et permettre de ce fait unemodélisation �able des conducteurs humains.
� Action : en fonction des informations obtenues lors de la perceptionde son environnement, et des décisions qu'il aura prises, l'agent vaentreprendre certaines actions lui permettant de se rapprocher de sonbut. Ces actions peuvent induire l'apparition de nouvelles informationsqu'il devra percevoir.
Le sujet de cette étude porte sur la prise d'informations visuelles desconducteurs virtuels dans une simulation de tra�c routier. C'est donc sur laperception que nous focaliserons notre attention. Les choix d'implémentationà ce propos sont variés, même si parmi eux deux sont plus fréquemmentutilisés : la vision synthétique et l'accès direct en base de données. En visionsynthétique, on cherchera à percevoir véritablement l'environnement commeun humain le fait avec ses yeux, et à en extraire les informations pertinentesà l'aide de �ltres et autres dispositifs tels les cartes de saillances. Dans lecadre du projet ARéViRoad [14] qui constitue l'environnement de travail dustage qui suit cette étude, le choix s'est porté sur les accès directs en basede données, du moins dans un premier temps, a�n de pouvoir se concentrer
6
davantage sur le comportement des conducteurs virtuels et l'intégration deconducteurs réels dans ce monde virtuel.
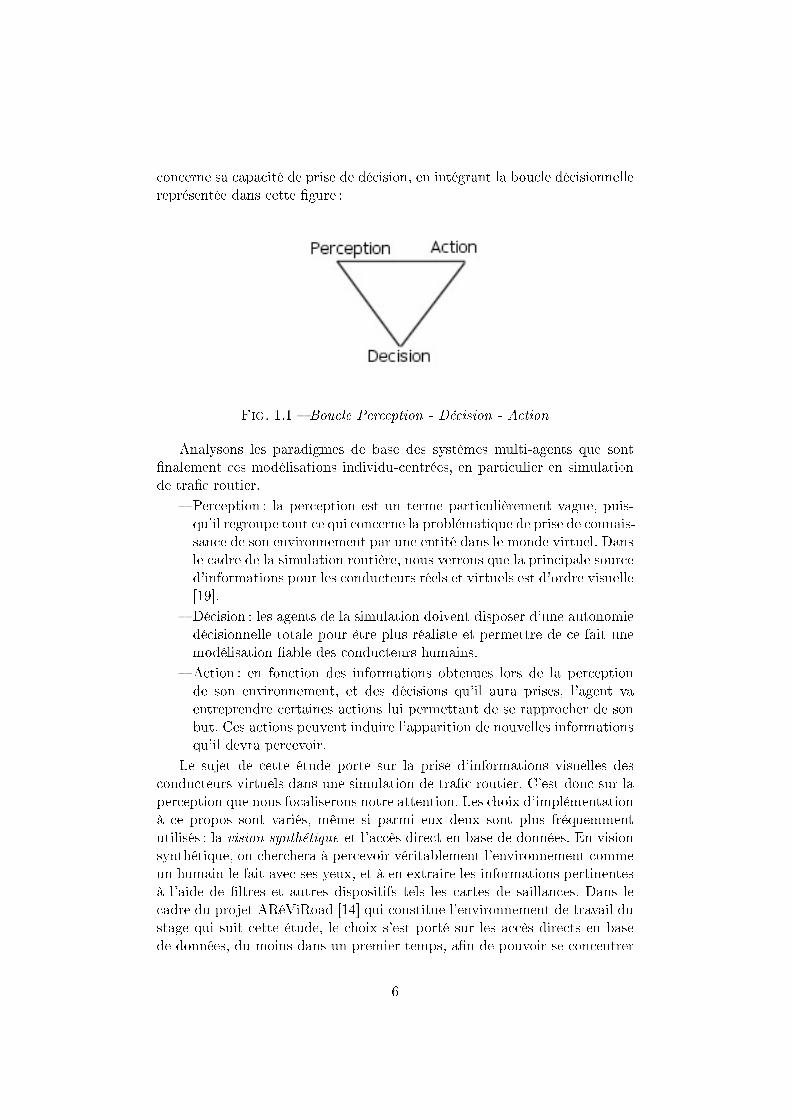
Parmi les travaux réalisés pour tenter de simuler le comportement deshumains et en particulier leur perception, notons la proposition d'un langagede modélisation de comportement (HPTS) par Stéphane Donikian [10]. Entant que système multi-agents, HPTS intègre un �ot de contrôle hiérarchiquesous forme d'automates parallèles et o�re la gestion de temporisation sur lesétats et les transitions, dont l'intérêt est de faire apparaître la notion detemps de réaction. Un paramètre optionnel des automates permet d'obtenirun système non-déterministe. Les communications entre les automates sefont par �ux d'entrées/sorties.
Fig. 1.2 � Représentation des automates d'HPTS
Un autre modèle, proposé cette fois par D. Reece et S. Shafer [18], permetd'intégrer la notion de routine visuelle, a�n de rechercher les informationsdans des parties précises de l'environnement perçu, dans une application detra�c routier. Ce principe élimine la focalisation spontanée de l'attention,puisque seuls les objectifs de l'agent sont pris en compte dans les actions deperception.
Dans la majorité des cas, le principal soucis des simulations visant à imi-ter le comportement humain, en particulier en situation de conduite, est derendre pertinente la perception visuelle. Une perception centrée sur la no-tion de ré�exe ne semble pas appropriée, puisque la conduite est en premierlieu une question de focalisation volontaire de l'attention visuelle de l'indi-vidu sur des centres d'intérêt particuliers en fonction de la situation et del'environnement. Cependant, la focalisation spontanée ne peut pas être écar-tée totalement, car elle joue un rôle dans les situations d'urgence. Dans lechapitre suivant, nous nous intéressons à la perception humaine selon diverspoints de vue.
7
Chapitre 2
Prise d'informations visuelleschez l'humain
L'étude du comportement des automobilistes dans un environnementvirtuel, la modélisation d'agents autonomes devant imiter les humains, laconception de véhicules intelligents ou de robots capables de percevoir leurenvironnement et de prendre des décisions en adéquation avec les informa-tions acquises par ces moyens [18] sont autant de domaines nécessitant, avanttoute tentative de modélisation, une connaissance avancée des paradigmesà la base de la perception humaine. La terminologie employée est volon-tairement ambigüe : de quelle perception parlons-nous ici ? À bord de sonvéhicule, un conducteur reçoit toute une variété de signaux qu'il doit inter-préter pour en extraire les données qui lui seront nécessaires a�n de menerà bien sa tâche de conduite. Il peut s'agir d'informations auditives (lorsqu'il"écoute" le son émis par son moteur et qu'il choisit le rapport de vitesse leplus adapté à la situation courante), proprioceptives (il ressent les forces quis'exercent sur son véhicule et modi�e sa façon de conduire pour les minimiserle plus souvent), mais la majeure partie [19] des informations est de naturevisuelle. C'est donc cette perception visuelle de son environnement qui vanous intéresser pour réaliser une simulation du tra�c routier à une échellemicroscopique selon une approche individu-centrée.
2.1 Mécanismes biologiques de la vue
Avant de chercher à analyser les aspects psychologiques de la perceptionet de la focalisation de l'attention de l'individu, il semble adéquate de �xerles mécanismes mis en jeu au niveau du corps humain pour acquérir lesinformations visuelles.
8
2.1.1 Structure de l'÷il
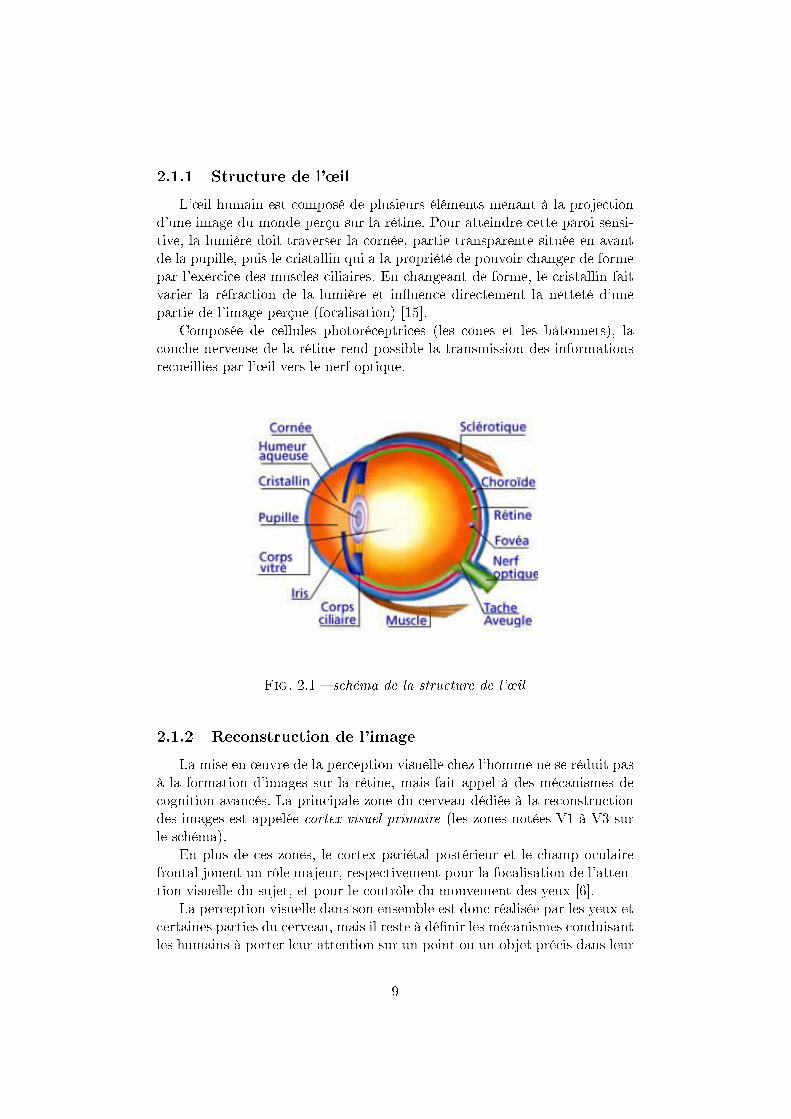
L'÷il humain est composé de plusieurs éléments menant à la projectiond'une image du monde perçu sur la rétine. Pour atteindre cette paroi sensi-tive, la lumière doit traverser la cornée, partie transparente située en avantde la pupille, puis le cristallin qui a la propriété de pouvoir changer de formepar l'exercice des muscles ciliaires. En changeant de forme, le cristallin faitvarier la réfraction de la lumière et in�uence directement la netteté d'unepartie de l'image perçue (focalisation) [15].
Composée de cellules photoréceptrices (les cônes et les bâtonnets), lacouche nerveuse de la rétine rend possible la transmission des informationsrecueillies par l'÷il vers le nerf optique.
Fig. 2.1 � schéma de la structure de l'÷il
2.1.2 Reconstruction de l'image
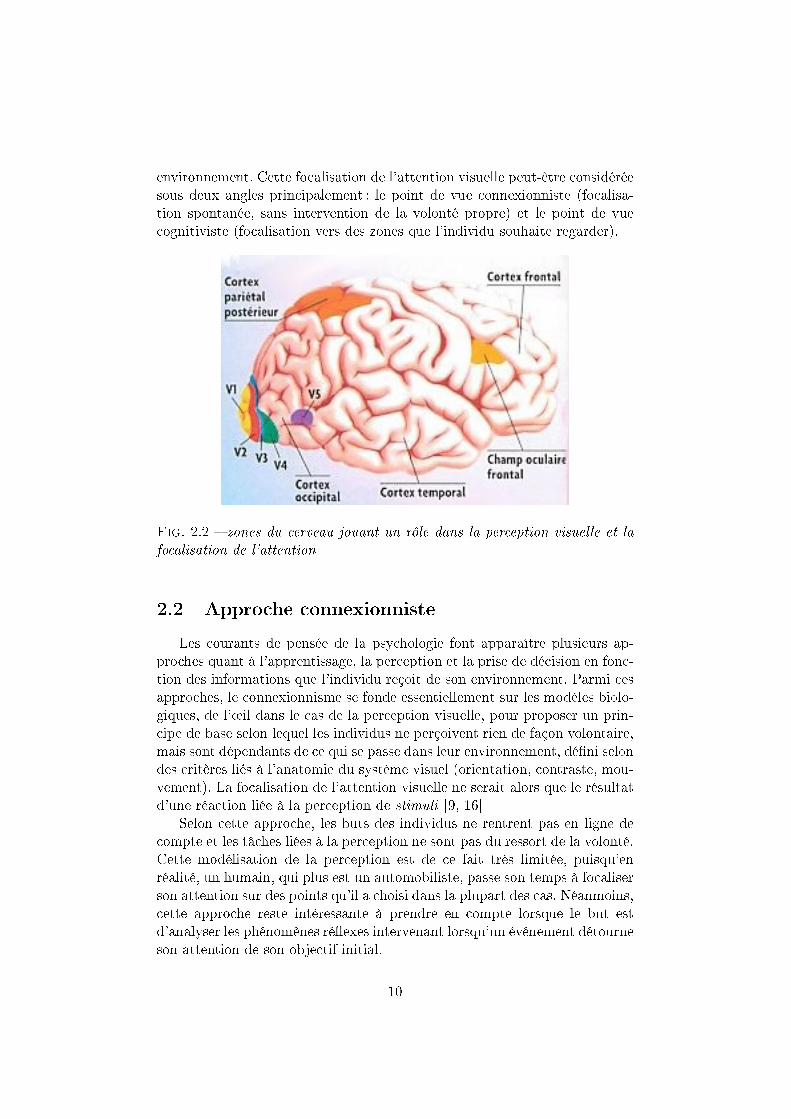
La mise en ÷uvre de la perception visuelle chez l'homme ne se réduit pasà la formation d'images sur la rétine, mais fait appel à des mécanismes decognition avancés. La principale zone du cerveau dédiée à la reconstructiondes images est appelée cortex visuel primaire (les zones notées V1 à V3 surle schéma).
En plus de ces zones, le cortex pariétal postérieur et le champ oculairefrontal jouent un rôle majeur, respectivement pour la focalisation de l'atten-tion visuelle du sujet, et pour le contrôle du mouvement des yeux [6].
La perception visuelle dans son ensemble est donc réalisée par les yeux etcertaines parties du cerveau, mais il reste à dé�nir les mécanismes conduisantles humains à porter leur attention sur un point ou un objet précis dans leur
9
environnement. Cette focalisation de l'attention visuelle peut-être considéréesous deux angles principalement : le point de vue connexionniste (focalisa-tion spontanée, sans intervention de la volonté propre) et le point de vuecognitiviste (focalisation vers des zones que l'individu souhaite regarder).
Fig. 2.2 � zones du cerveau jouant un rôle dans la perception visuelle et lafocalisation de l'attention
2.2 Approche connexionniste
Les courants de pensée de la psychologie font apparaître plusieurs ap-proches quant à l'apprentissage, la perception et la prise de décision en fonc-tion des informations que l'individu reçoit de son environnement. Parmi cesapproches, le connexionnisme se fonde essentiellement sur les modèles biolo-giques, de l'÷il dans le cas de la perception visuelle, pour proposer un prin-cipe de base selon lequel les individus ne perçoivent rien de façon volontaire,mais sont dépendants de ce qui se passe dans leur environnement, dé�ni selondes critères liés à l'anatomie du système visuel (orientation, contraste, mou-vement). La focalisation de l'attention visuelle ne serait alors que le résultatd'une réaction liée à la perception de stimuli [9, 16]
Selon cette approche, les buts des individus ne rentrent pas en ligne decompte et les tâches liées à la perception ne sont pas du ressort de la volonté.Cette modélisation de la perception est de ce fait très limitée, puisqu'enréalité, un humain, qui plus est un automobiliste, passe son temps à focaliserson attention sur des points qu'il a choisi dans la plupart des cas. Néanmoins,cette approche reste intéressante à prendre en compte lorsque le but estd'analyser les phénomènes ré�exes intervenant lorsqu'un événement détourneson attention de son objectif initial.
10
2.3 Approche cognitiviste
L'approche cognitive est tout à fait contraire à l'approche connexionnistevue brièvement dans la section précédente, puisqu'elle s'appuie sur la dé�-nition suivante pour justi�er le fait que toutes les tâches de perception fontpartie d'une plani�cation permettant à l'individu d'atteindre son but.Cognition : la cognition est l'activité mentale par laquelle l'individu prend
conscience et a connaissance de son environnement, ce qui inclut desprocessus de perception, de mémorisation, de raisonnement, de juge-ment et de résolution de problème.
Cette dé�nition de la cognition, provenant au tout départ du domainede la psychologie, a été rappelée dans la proposition d'un modèle cognitif deconducteur de D. Krajzewicz et du Dr. Peter Wagner [12].
Le point de vue cognitif a été choisi par M. Basset dans sa descriptiondu conducteur routier [4]. Selon lui, l'automobiliste dans son environnementest comparable dans une certaine mesure à un opérateur humain dans unesalle de contrôle. Il doit rechercher les informations qui lui seront utiles,les acquérir (on retrouve la notion de focalisation de l'attention, mais cettefois il s'agit bien d'une activité volontaire) et les interpréter pour pouvoirentreprendre les actions adéquates.
Les approches cognitiviste et connexionniste ont chacune leurs avantageset leurs inconvénients, mais ne sont pas incompatibles : une méthode per-mettant d'obtenir un réalisme plus grand serait d'associer ces deux types demodèles pour identi�er à la fois les notions de plani�cation, très présenteset même indispensables en particulier dans une situation de conduite, et lesfocalisations spontanées de l'attention, correspondant davantage à la notionde ré�exe.
11
Chapitre 3
Modélisation et simulation ducomportement visuel duconducteur humain
Dans les simulations visant à modéliser le comportement des humains, laperception sensorielle est l'un des points les plus importants à traiter pourtenter d'obtenir un résultat le plus proche possible de la réalité. Cette per-ception peut-être proprioceptive (i.e. sensation des forces qui s'exercent surle corps de l'individu), acoustique, mais la majeure partie des informationsexploitées par l'humain ou l'agent sont d'origine visuelle.
Les courants de pensée nés dans le domaine de la psychologie et lesconnaissances tirées de la biologies ont donné lieu à deux approches dontle but commun est de simuler au mieux cette perception visuelle.
D'une part, l'approche bottom-up ou connexionniste [9, 20, 16] part dupostulat que la perception visuelle et surtout la focalisation de l'attention del'individu ne sont pas régis par les buts ou intentions de cet individu. C'estune approche axée sur les stimuli sensoriels et les réactions qui en découlent.
D'autre part, l'approche en sens inverse top-down ou cognitiviste [12, 5,13] �xe des objectifs, des intentions aux individus en fonction de leur but�nal, intentions à partir desquelles la focalisation de l'attention visuelle estdirigée vers les objets ou aspects de la scène identi�és comme importantspour mener à bien l'action souhaitée.
A la frontière de ces deux méthodes d'implantation de la perception enréalité virtuelle, les approches hybrides [7] tentent de tirer partie des avan-tages de ces deux approches pour obtenir un comportement plus réaliste desagents qui ont alors certes des objectifs et donc des tâches de recherche de l'in-formation à mener à bien, mais qui sont également sensibles aux événementsimprévus ou perturbateurs pouvant intervenir dans leur champ perceptuel(principalement le champ visuel).
12
3.1 Méthodes bottom-up
Lorsqu'on conçoit un système en réalité virtuelle, supposé simuler le com-portement d'un être humain, qui plus est un automobiliste, il est essentiel detrouver une façon de représenter le processus d'acquisition de l'informationpour ensuite aboutir à une capacité de décision en rapport avec les besoins.
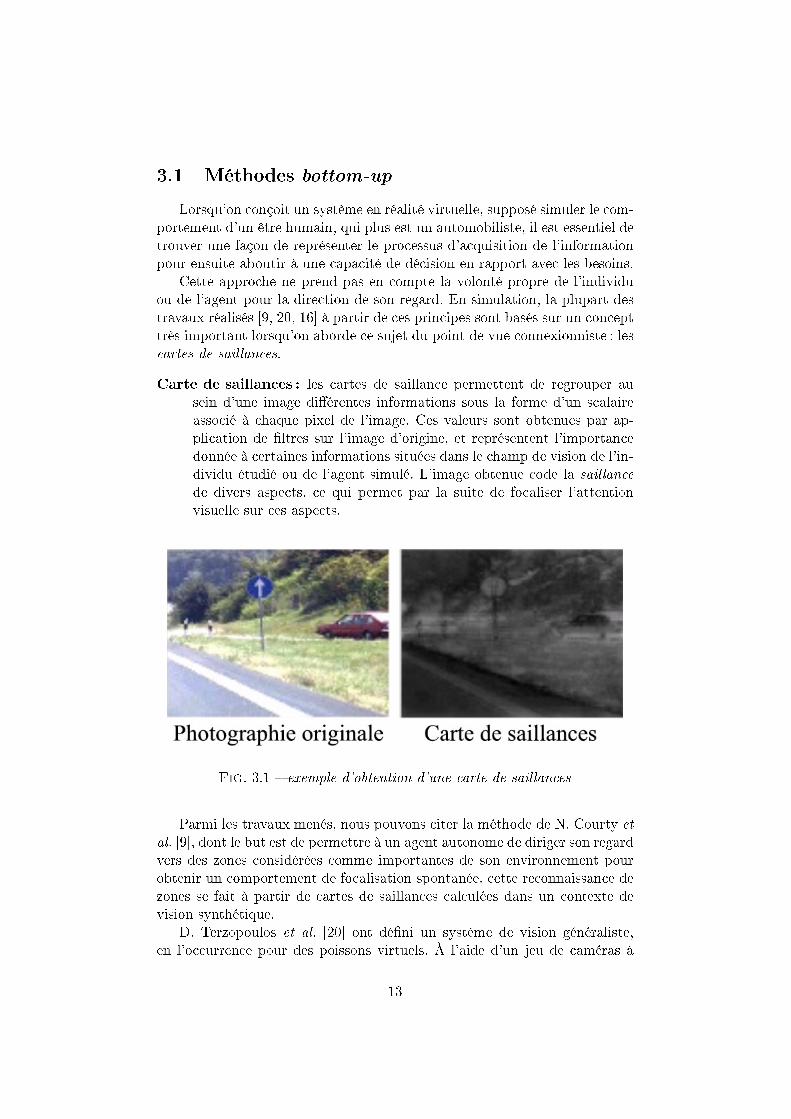
Cette approche ne prend pas en compte la volonté propre de l'individuou de l'agent pour la direction de son regard. En simulation, la plupart destravaux réalisés [9, 20, 16] à partir de ces principes sont basés sur un concepttrès important lorsqu'on aborde ce sujet du point de vue connexionniste : lescartes de saillances.Carte de saillances : les cartes de saillance permettent de regrouper au
sein d'une image di�érentes informations sous la forme d'un scalaireassocié à chaque pixel de l'image. Ces valeurs sont obtenues par ap-plication de �ltres sur l'image d'origine, et représentent l'importancedonnée à certaines informations situées dans le champ de vision de l'in-dividu étudié ou de l'agent simulé. L'image obtenue code la saillancede divers aspects, ce qui permet par la suite de focaliser l'attentionvisuelle sur ces aspects.
Fig. 3.1 � exemple d'obtention d'une carte de saillances
Parmi les travaux menés, nous pouvons citer la méthode de N. Courty etal. [9], dont le but est de permettre à un agent autonome de diriger son regardvers des zones considérées comme importantes de son environnement pourobtenir un comportement de focalisation spontanée. cette reconnaissance dezones se fait à partir de cartes de saillances calculées dans un contexte devision synthétique.
D. Terzopoulos et al. [20] ont dé�ni un système de vision généraliste,en l'occurrence pour des poissons virtuels. À l'aide d'un jeu de caméras à
13

résolutions identiques mais ouvertures di�érentes, ils ont pu reconstituer unsystème de vision tel que la perception soit détaillée dans la partie centrale,et plus �oue en périphérie.
Christopher Peters et Carol O'Sullivan [16] se sont basés quant à eux surun accès direct aux bases de données de la simulation pour échapper à laproblématique de la reconnaissance de forme à partir d'une image obtenuepar vision synthétique. Combinée à des cartes de saillances et à des tech-niques de rendu, leur modèle permet d'obtenir une focalisation spontanéede l'attention. Cette méthode a l'avantage de pouvoir être associée à uneapproche top-down en y ajoutant ainsi les événements inattendus.
L'approche bottom-up est essentiellement vouée à la détection d'informa-tions en vue d'une focalisation spontanée de l'attention visuelle. Son objectifn'est pas de fournir un moyen de focaliser l'attention sur un élément de lascène en fonction de la volonté de l'agent. L'approche cognitiviste expliquéedans la partie suivante fonctionne à l'inverse à partir des buts de l'agent.
3.2 Méthodes top-down
Contrairement à la méthode décrite précédemment, l'approche top-downtient compte des intentions de l'individu observé ou de l'agent simulé. Ils'agit donc de concepts de plus haut niveau que lors de l'étude des stimulivisuels et de leur in�uence sur la focalisation de l'attention.
Cette fois-ci, au lieu de rechercher les zones d'intérêt dans l'image par-venant à l'÷il, et d'en déduire les points sur lesquels l'entité focalisera sonattention, des buts sont dé�nis en fonction de ce que souhaite réaliser l'agent,et c'est une approche cognitive qui est privilégiée.
Comme pour l'approche connexionniste, l'approche cognitiviste a faitl'objet de nombreuses études [12, 5, 13] dont voici quelques travaux et mo-dèles.
C. Bordeux et al. [5] ont proposé un modèle dans lequel les objets de lascène sont accédés directement à travers la base de données, et �ltrés pour neconserver que les objets dont les caractéristiques sont celles présentes dansles intentions visuelles de l'agent (par exemple la couleur de la carrosserie,la vitesse d'un véhicule, la forme d'un panneau de signalisation,. . . ). La fo-calisation de l'attention est donc réalisée au niveau de la base de données,ce qui pose certains problèmes sur le plan du réalisme, selon M. Veyret[23].
L'approche de J. Ku�ner et J. Latombe [13] repose quant à elle sur l'as-sociation à la fois d'une vision synthétique et d'un accès direct dans les basesde données du modèle. La présence de la vision synthétique permet de déter-miner certaines informations comme la visibilité des objets, par applicationde fonctions de rendu simples. L'image obtenue permet de trouver les objetsde la scène qui sont vus par l'agent. L'agent peut alors focaliser son attentionvisuelle en fonction de son but.
14
Le projet de D. Krajzewicz et du Dr. Peter Wagner [12] utilise une ap-proche visant à modéliser les processus cognitifs d'obtention d'informationspar le conducteur humain.
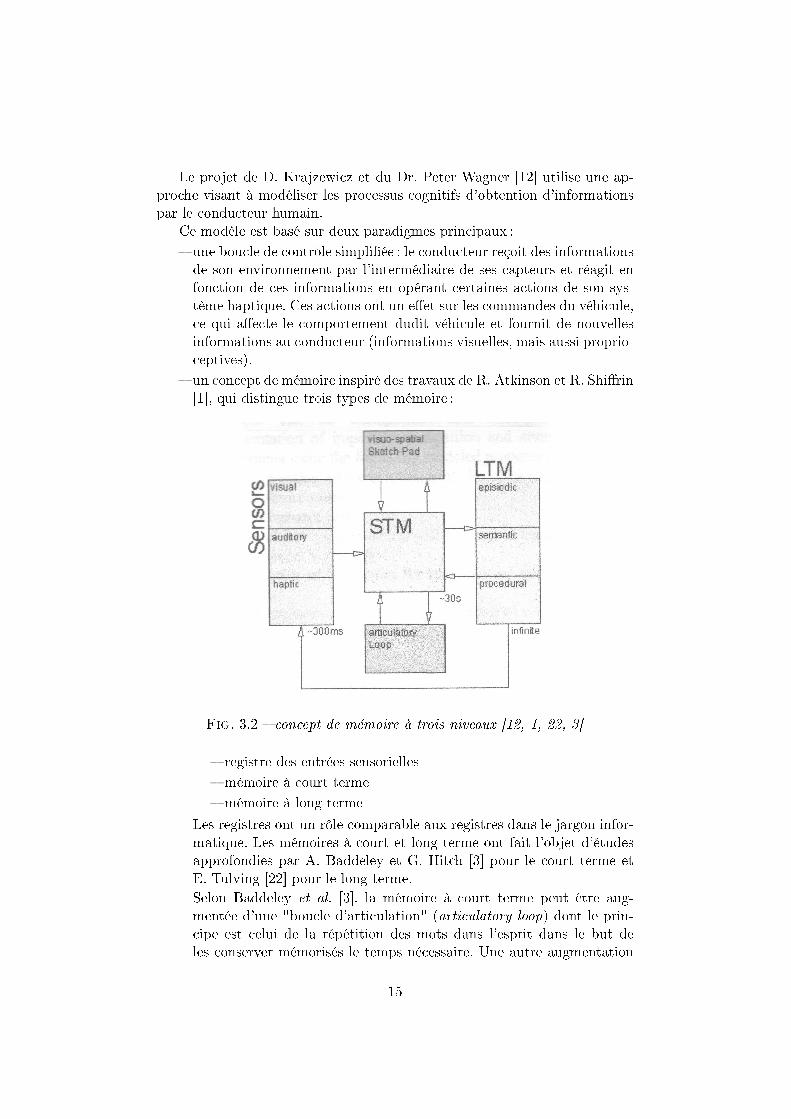
Ce modèle est basé sur deux paradigmes principaux :� une boucle de contrôle simpli�ée : le conducteur reçoit des informationsde son environnement par l'intermédiaire de ses capteurs et réagit enfonction de ces informations en opérant certaines actions de son sys-tème haptique. Ces actions ont un e�et sur les commandes du véhicule,ce qui a�ecte le comportement dudit véhicule et fournit de nouvellesinformations au conducteur (informations visuelles, mais aussi proprio-ceptives).
� un concept de mémoire inspiré des travaux de R. Atkinson et R. Shi�rin[1], qui distingue trois types de mémoire :
Fig. 3.2 � concept de mémoire à trois niveaux [12, 1, 22, 3]
� registre des entrées sensorielles� mémoire à court terme� mémoire à long terme
Les registres ont un rôle comparable aux registres dans le jargon infor-matique. Les mémoires à court et long terme ont fait l'objet d'étudesapprofondies par A. Baddeley et G. Hitch [3] pour le court terme etE. Tulving [22] pour le long terme.Selon Baddeley et al. [3], la mémoire à court terme peut être aug-mentée d'une "boucle d'articulation" (articulatory loop) dont le prin-cipe est celui de la répétition des mots dans l'esprit dans le but deles conserver mémorisés le temps nécessaire. Une autre augmentation
15

qu'ils proposent est baptisée visuo-spatial sketch-pad, et sert à la repro-duction d'images mentales associées à certains concepts, ce qui permetà l'humain une mémorisation plus e�cace.Les travaux de E. Tulving [22] portent sur la mémoire à long terme,qu'il propose de découper en trois composantes :
� la mémoire épisodique (informations liées à une scène particulièrevécue dans le passé par l'individu);
� la mémoire sémantique (règles logiques)� la mémoire procédurale (informations non formulables de façondéclarative liées aux mouvements)
Le principal atout du modèle proposé par D. Krajzewicz et P. Wagner[12] réside dans la notion de conscience du conducteur. Cette conscience estlocalisée selon eux dans la mémoire à court terme, et est limitée en taille.
Ces modèles, qu'il s'agisse de l'approche cognitiviste ou de l'approcheconnexionniste décrite dans la partie précédente, ne sont pas fondamenta-lement opposées, mais bien au contraire se complètent avantageusement,apportant un réalisme augmenté lorsqu'elles sont combinées, comme dansles modèles dits hybrides.
3.3 Approches hybrides
A la frontière du connexionnisme et du cognitivisme, les approches hy-brides permettent, dans un modèle guidé par les objectifs, d'ajouter unedimension de spontanéité en permettant une préemption des événementsperturbateurs se produisant dans le champ perceptuel de l'individu ou del'agent simulé.
C'est dans cette idée d'interactions entre les di�érents niveaux de percep-tion visuelle que S. Chopra-Khullar et N. I. Badler [7] ont conçu leur modèlede simulation du comportement visuel d'humains virtuels. Selon eux, il existedeux principaux types de facteurs liés à l'attention de l'agent : les facteursendogènes et les facteurs exogènes.
Les facteurs endogènes sont regroupés dans une liste d'intentions, et cor-respondent à des actions de perception relevant de la volonté propre de l'indi-vidu. Par cette plani�cation, le personnage pourra focaliser son attention versdes objets particuliers décidés au préalable, ou vers des zones de la scène d'oùil doit extraire un certain nombre d'informations soit pour pouvoir continuervers son but, soit pour sa sécurité, par exemple.
Les facteurs exogènes correspondent quant à eux à des événements n'ayantpas leur place dans la liste d'intentions. Il s'agit d'éléments périphériques per-turbant la plani�cation, et disposant d'un droit de préemption sur les actionsperceptuelles plani�ées.
À titre d'exemple, imaginons un individu souhaitant se rendre à un arrêtde bus situé de l'autre coté de la rue par rapport à sa position actuelle. Les
16

éléments présents dans sa plani�cation (i.e. les facteurs endogènes) sont :� aller au bord du trottoir devant le passage protégé en �xant cet objectif� regarder le feu de signalisation� quand il passe au vert, véri�er à gauche. . .� puis à droite, puis à gauche à nouveau� traverser en �xant l'arrêt de bus
Un facteur exogène perturbant la plani�cation de cet individu peut être parexemple des enfants qui passent devant lui en courant. Cet événement captel'attention du personnage qui doit en tenir compte pour atteindre son butdans les meilleures conditions.
Dans le système proposé par S. Chopra-Khullar et N. I. Badler [7], cesfacteurs sont modélisés par deux listes : la liste des facteurs endogènes Inten-tionList et la liste des facteurs exogènes PList, pour PeripheralList. Quandces deux listes sont vides, l'agent adopte un comportement visuel par défautappelé spontaneous looking, qui correspond aux automatismes que l'on re-trouve dans le comportement visuel humain. Ce comportement par défaut estégalement présent lorsque l'individu est en mouvement. C'est alors l'actioninconsciente de focalisation régulière de son attention en direction du sol.Cette action involontaire ne rentre pas dans le cadre des facteurs exogènes,et vient s'intercaler à intervalle de temps régulier dans la liste des facteursendogènes pour s'intégrer dans les actions à entreprendre lors de la poursuited'un but par l'agent.
Notons en outre que ce modèle intègre une notion parfois un peu délais-sée suivant la méthode de modélisation : le temps. Dans le cas du modèle desimulation proposé pas S. Chopra-Khullar et N. I. Badler [7], le temps estune composante essentielle, puisque typiquement le temps de réaction et deperception n'est pas le même lors d'une focalisation volontaire ou sponta-née de l'attention. En l'occurrence, ils notent ici l'augmentation de ce qu'ilsappellent eye saccade (on pourra essayer de traduire ce terme par délai desaccade de l'oeil) lorsque l'attention est déjà focalisée sur un élément de lascène, et que l'individu doit diriger son regard vers un autre objet, de façonvolontaire ou non. Dans un contexte de vision non engagée, ce délai est del'ordre de 100ms, contre 200ms lorsque l'individu porte déjà son attentionsur un autre point.
Les temps de réactions peuvent s'avérer un élément essentiel à prendreen compte dans les simulations visant à modéliser le comportement visuelhumain, et en particulier dans des problématiques telles que le tra�c routier,où le facteur temps est un élément majeur dans la capacité de prise dedécision des conducteurs. Dans les situations réelles, il n'est pas rare que lesaccidents soient dus à un temps de réaction trop longs, selon M. Basset [4].
17
Conclusion/Perspective
Radars automatiques, spots publicitaires, campagnes de prévention : lasécurité routière est au c÷ur des préoccupations du gouvernement français.Pourtant, au-delà de ces actions, d'autres techniques visent à simuler le com-portement des conducteurs pour mieux comprendre leurs réactions et tenterde trouver des solutions a�n de rendre les routes plus sûres.
En situation de conduite, l'automobiliste est amené à prendre des dé-cisions dépendant directement de son environnement. Il doit donc recher-cher un certain nombre d'informations pour agir en adéquation avec lescontraintes liées à la morphologie de la route, aux conditions météorolo-giques, au comportement attendu des autres véhicules, etc.
Bien que cette perception puisse être d'origine auditive ou propriocep-tive, la majeure partie des informations utiles à l'automobiliste est d'originevisuelle [19]. C'est donc à ce mode de perception que ce document est consa-cré. Les approches de modélisation de la perception visuelle, et en particu-lier de focalisation de l'attention, privilégient soit la focalisation instantanée(approche connexionniste), soit la focalisation volontaire (approche cogniti-viste). En pratique, un comportement réaliste des conducteurs virtuels dansl'environnement simulé nécessite une approche hybride, autorisant le conduc-teur à plani�er ses actions de perception, tout en o�rant une possibilité depréemption pour la capture de l'attention par un événement inattendu.
Cependant, aussi réaliste soit-elle, la perception visuelle modélisée parces procédés ne tient pas compte des contraintes physiologiques et psycho-logiques propres à l'humain. Ces contraintes sont par exemple la fatigue, lestress, la prise de substances dopantes ou au contraire relaxantes, etc.
Dans le travail qui sera réalisé lors du stage de recherche qui suit cetteétude, ce sont ces facteurs perturbateurs qui seront ajoutés dans la simula-tion proposée par l'équipe ARéVi du Centre Européen de Réalité Virtuelle.À terme, l'objectif est de disposer d'un outil de simulation dans lequel lesconducteurs virtuelles seront imprévisibles, et enfreindront parfois le code dela route, volontairement ou involontairement, comme le font les humains dansle monde réel. Cet imprévisibilité des automobilistes virtuels contribuera àrendre la simulation encore plus réaliste.
18
Bibliographie
[1] R. Atkinson & R. Shi�rin, Human Memory : a proposed system and its controlprocesses, in The psychology of learning and motivation: Advances in researchand theory, K. W. Spence, editors, New York: Academic Press, pp. 89-195 (1968)
[2] A. Aw & M. Rascle, Resurrection of "second order" models of tra�c �ow?, inSIAM J. Appl. Math., 60 (2000)
[3] A. Baddeley & G. Hitch,Working Memory, in G. Bower (Ed.), Recent advancesin learning and motivation. New York: Academic Press, (1974)
[4] M. Basset, Le conducteur routier, in G. Gissinger & N. Le Fort-Piat, La voitureintelligente, (2002)
[5] C. Bordeux, R. Boulic & D. Thalmann, An e�cient and �exible perceptionpipeline for autonomous agents, in Brunet & Scopigno, editors, ComputerGraphics Forum (Eurographics '99), vol. 18 (3), pp. 23-30 (1999)
[6] N. A. Campbell, Biologie, Bruxelles : De Boeck-Wesmael, editors, translationfrom Biology, 3rd ed., pp. 1008-1021 (1993)
[7] S. Chopra-Khullar & N. I. Badler, Where To Look? Automating AttendingBehaviors of Virtual Human Characters, in Autonomous Agents '99, Seattle,USA (1999)
[8] L. Chrisman & R. Simmons, Sensible Planning: Focusing Perceptual Attention,in Proceeding AAAI-91, Anaheim, USA (1991)
[9] N. Courty, E. Marchand & B. Arnaldi, A new application for saliency maps :Synthetic vision of autonomous actors, in IEE Int. Conf. on Image Processing,ICIP'03, Barcelona, Spain (2003)
[10] S. Donikian, HPTS: A Behaviour Modelling Language for AutonomousAgents, in AGENTS '01, Montréal, Canada (2001)
[11] P. Goatin, The Aw-Rascle tra�c �ow model with phase transitions (2005)
19
[12] D. Krajzewicz & P. Wagner, ACME (A Common Mental Environment)-Driver- A Cognitive Car Driver Model, in Meuth Amborski, Krzysztof & Hermann,editors, proceedings of the 16th Simulation Multiconference "Modelling andSimulation 2002",pp. 689-693 (2002)
[13] J. Ku�ner & J. Latombe, Fast Synthetic vision, memory and learning modelsfor virtual humans, (1999)
[14] E. Maisel & D. Herviou, ARéViRoad: a tra�c road simulator to learn tobehave, in Proceeding of Cyberworlds'05 (2005)
[15] Nguyen Huu, H. Person & B. Vallée, Tête (tome 2) : cavités de la face, organesdes sens, nerfs crâniens, in Les nouveaux dossiers de l'anatomie, Heures deFrance, editor, pp. 73-78 (2005)
[16] C. Peters & C. O'Sullivan, Bottom-Up visual attention for virtual humananimation (2003)
[17] R. Querrec, Les Systèmes Multi-Agents pour les Environnements Virtuels deFormation, PhD thesis (2002)
[18] D. A. Reece & S. A. Shafer, Control of perceptual attention in robot, inArti�cial Intelligence 78 (1995) 397-430
[19] M. Sivak, The information that drivers use: is it indeed 90% visual?, inPerception, 25 (1996)
[20] D. Terzopoulos, T. Rabie & R. Grzesczuck, Perception and learning inarti�cial animals, in Arti�cial Life V : Proc. Fifth Int. Conf. on the Synthesisand Simulation of Living Systems, Nara, Japan (1996)
[21] J. Tisseau, Réalité virtuelle : autonomie in virtuo, HDR, document de syn-thèse, Université de Rennes 1, (2001).
[22] E. Tulving, Episodic and semantic memory, Tulving & Donaldson, editors, inOrganization of memory, New York: Academic Press, pp. 381-403 (1972)
[23] M. Veyret, Modélisation de la focalisation de l'attention visuelle, rapport destage de DEA, (2004)
20