Embed Size (px)
Citation preview

Révisions écrits ATS - Mécanique 1 / 46
REVISIONS DES ECRITS POUR LE CONCOURS ATS
Révisions de mécanique 3
◼ Les incontournables 3
◼ sujet MK1 : ATS 2013 : Descente rectiligne en luge PFD 3
◼ sujet MK2 : ATS 2008 : Viscosité de l’eau PFD, vitesse limite 4
◼ sujet MK3 : ATS 2016 : Stabilité d’un nuage TEm, vitesse limite 4
◼ sujet MK4 : ATS 2017 : Lévitation statique PFD, vitesse limite 5
◼ Sujet MK5 : EPITA/IPSA/ESME 2018 : Sédimentation de particules sous l'effet de la gravité PFD, vlim, TEM 6
◼ sujet MK6 : ATS 2004 : Mouvement d’un anneau Em et graphe d’Ep 8
◼ sujet MK7 : ATS 2014 : Etude d’un satellite de télédétection terrestre Em et graphe d’Ep 9
◼ Sujet MK9 : D’après concours général – 2018 : Physique pendant les fêtes TEM, PFD, 1er ordre 12
◼ Sujet MK10 : ATS 2015 : Brève histoire d’un proton accéléré (LHC au CERN) Em et Ep 13
◼ Sujet MK 12 : ATS 2012 : Détection des chocs frontaux, protection des passagers : l’airbag oscillations libres 15
◼ Sujet MK13 : CCP TSI 2013 Modélisation d’une suspension de véhicule Oscillations libres 18
◼ Sujet MK14 : Modélisation d’un trampoline Oscillations libres 20
◼ Sujet MK16 : D’après G2E 2018 - Le sapin oscillations libres, forcées 25
◼ Sujet MK17 : CCINP – TPC 2019 : Mouvement d’une plateforme en mer Oscillations libres , forcées 27
◼ Sujet MK18 : Centrale-Supélec - TSI 2018 : Vibrations du verre Oscillations libres, forcées 30
◼ Sujet MK19 : ATS 2011 : Générateur d’énergie portable Oscillations forcées 35
◼ Sujet MK 21 : E3a MP 2016 - AFM en mode oscillant Oscillations libres, forcées 37
◼ SUJET MK22 : Banque PT 1999 : Corde de Melde Ondes mécaniques 40
◼ SUJET MK23 : ATS 2018 : De la corde vibrante au principe du four micro-ondes Ondes 42
◼ SUJET MK24 : ATS 2019 - Onde et impédance Ondes mécaniques 44
Sujet S1 S2 S3 S4 S5 S6 S7 S9 S10 S12 S13 S14 S16 S17 S18 S19 S21 S22 S23 S24
MK1-3 × × × × × × × × × × ×
MK4 × × × × × × × × ×
MK5 × × × × × × × × × × × × ×
MK6 × × × × ×
MK7 × × ×
Niveau 1 1,5 1,5 1,5 2 2,5 4,5 3 2,5 3 2,5 3 2,5 3,5 3 3,5 3 2 3,5 4,5
Durée (min)
20 15 15 25 45 30 50 35 40 70 70 120 60 100 70 50 40 40 50 40
Calculs 1 2 2 2 2 2 6 2 2 5 5 4 5 6 5 6 5 5 6 5
◼ EXEMPLES DE PLANS DE REVISION DE MECANIQUE
Niveau 1 : Sujets MK1, MK3, MK6, MK16, MK22 (pour compléter : MK10, MK13, MK18)
Niveau 2 : Sujets MK2, MK6, MK13, MK18, MK22 (pour compléter : MK10, niveau 3)
Niveau 3 : Sujets MK5, MK7, MK14, MK17, MK21, MK23 (pour compléter : MK9, MK10)
Parcours Express : Sujets MK2, MK12, MK18, MK22
◼ PLUS EN DETAILS
Sujet MK1 : PFD, étude d’un mouvement rectiligne uniformément accéléré

Révisions écrits ATS - Mécanique 2 / 46
Sujet MK2 : PFD avec poussée d’Archimède, transitoire du 1er ordre - vitesse limite
Sujet MK3 : Em, Ep, TPM, transitoire du 1er ordre et vitesse limite
Sujet MK4 : PFD avec force électrostatique, transitoire du 1er ordre et vitesse limite
Sujet MK5 : Analyse dimensionnelle, Ep, Em, TPM, transitoire du 1er ordre et vitesse limite, détermination graphique du temps
caractéristique, temps de chute.
Sujet MK6 : Ep, Em, TEM, TPM, graphe d’Ep + stabilité de l’équilibre, oscillateur harmonique (équadiff., résolution, période,
amplitude)
Sujet MK7 : F = −grad Ep, Em et graphe d’Ep (état lié ou de diffusion), mouvement circulaire, analyse dimensionnelle, TPM,
transitoire du 1er ordre
Sujet MK9 : Résolution de pb, Em, TEM, analyse dimensionnelle, PFD avec poussée d’Archimède, transitoire du 1er ordre,
étude graphique
Sujet MK10 : PFD, Détermination Ep, TEM, force de Lorentz
Sujet MK12 : Ep, positions d’équilibre, MR avec graphe, Em, TPM, oscillations libres (oscillateur harmonique amorti, résolution
régime pseudo-périodique, étude de graphes et de valeurs particulières)
Sujet MK13 : Ep, équilibre, TPM, oscillateur harmonique non amorti (résolution, étude courbe) et amorti (résolution, étude
courbe pour régime pseudo-périodique et apériodique)
Sujet MK14 : Ep, analyse dimensionnelle, équilibre, TPM, oscillateur harmonique (résolution, étude de la courbe, portrait de
phase, vitesse), MRUA et intégration, hauteur maximale, Em, oscillateur harmonique amorti (résolution en régime
pseudo-périodique, portrait de phase), Ep, stabilité de l’équilibre.
Sujet MK16 : MFL1, Em, TPM, oscillateur harmonique (pulsation propre seulement), oscillateur harmonique amorti (conditions pour les différents régimes, allures des courbes, résolution complète du régime critique, étude en régime sinusoïdal forcé : notation complexe et étude de la résonance en amplitude).
Sujet MK17 : PFD, oscillateur harmonique (résolution, étude des différentes énergies, valeurs moyennes), oscillateur harmonique amorti (régime pseudo-périodique : résolution, énergies, courbes, décrément logarithmique, exploitation graphique, étude en régime sinusoïdal forcé : notation complexe et étude de la résonance en amplitude + exploitation).
Sujet MK18 : Spectre d’un signal, PFD, oscillateur harmonique amorti (résolution régime pseudopériodique, Détermination graphique (Q et temps caractéristique), étude en régime sinusoïdal forcé : notation complexe et étude complète de la résonance en amplitude, fréquences de coupure, exploitation graphique).
Sujet MK19 : Exploitation courbe sinusoïdale, PFD, équilibre, oscillateur harmonique amorti en régime sinusoïdal forcé (2
référentiels) : notation complexe, étude de la vitesse et de l’amplitude, résonance en vitesse, étude de la
puissance).
Sujet MK 21 :. Analyse dimensionnelle, PFD, oscillateur harmonique amorti, étude en régime sinusoïdal forcé : notation complexe, étude de la résonance en amplitude, calculs complémentaires).
Sujet MK22 : Ondes mécaniques : équation de propagation sur une corde, célérité de l’onde, solutions stationnaires, modes
propres, application guitare
Sujet MK23 : Ondes mécaniques : équation de propagation sur une corde, du son dans un fluide, célérité de l’onde, solutions
stationnaires et modes propres pour une corde et une onde EM (application au micro-onde)

Révisions écrits ATS - Mécanique 3 / 46
REVISIONS DE MECANIQUE
◼ LES INCONTOURNABLES
• Exercices type à résoudre par le PFD ou le théorème de l’énergie mécanique : chute libre sans et avec
frottements (cf. DM), point matériel sur la ligne de plus grande pente, oscillations libres
• Savoir exploiter un graphe d’énergie potentielle
• Oscillations forcées : déterminer l’amplitude des oscillations en fonction de ω, tracer le graphique A(ω)
• Savoir retrouver l’équation de la corde vibrante
◼ SUJET MK1 : ATS 2013 : DESCENTE RECTILIGNE EN LUGE PFD
La luge est devenue un sport olympique en 1964 à Innsbruck (Autriche). Le lugeur est allongé, sur le dos et
les pieds en avant, sur la luge qui glisse sur une piste de glace. Pour freiner, le lugeur ne peut compter que
sur ses pieds car la luge ne comporte pas de frein. Les spécialistes peuvent atteindre des vitesses supérieures
à 100 km/h.
Pour la modélisation, on assimile l’ensemble { luge + lugeur } (désigné par la suite sous le terme simple de
luge) à un point matériel M de masse 𝑚 = 100 kg. La piste est considérée comme un référentiel galiléen.
L’accélération de la pesanteur est prise égale à 𝑔 = 10 m.s− 2.
Après la phase de poussée, la luge atteint une vitesse v0 = 5,0 m.s− 1. Elle descend
ensuite une piste rectiligne de pente constante, inclinée de 10% (on descend
verticalement de 10 m quand on avance horizontalement de 100 m). On appelle α
l’angle que fait la piste avec l’horizontale. Les frottements sont négligés devant les
autres forces en jeu. Le point M est ainsi en mouvement rectiligne uniformément
accéléré.
1. Effectuer le bilan des forces qui s’exercent sur la luge et dessiner un schéma représentant ces forces, en
justifiant soigneusement leur direction et leur sens.
2. Par application de la relation fondamentale de la dynamique, exprimer et calculer numériquement
l’accélération a de la luge en fonction de l’accélération de la pesanteur g et de l’angle α.
3. L’origine des temps est fixée juste après la phase de poussée. Donner l’expression de la vitesse en
fonction du temps. Au bout de quelle durée 𝑡 a la luge atteint-elle la vitesse va = 30 m.s− 1 ? Application
numérique.
4. Quelle est la distance parcourue lorsque la luge atteint la vitesse va ? Application numérique.
La luge franchit la ligne d’arrivée à la vitesse va = 30 m.s− 1. Dans cette partie, les frottements sont négligés
devant les autres forces en jeu.
5. Le ralentissement à l’arrivée se fait sur une piste inclinée de 10% (on
monte de 10 m quand on avance horizontalement de 100 m). On note
l’angle d’inclinaison 𝛼. Déterminer la longueur 𝐿 de la piste de
ralentissement nécessaire pour que la luge passe de va = 30 m.s− 1 à
l’arrêt, en utilisant la conservation de l’énergie mécanique. Faire
l’application numérique et conclure sur la faisabilité de cette
méthode de ralentissement.

Révisions écrits ATS - Mécanique 4 / 46
◼ SUJET MK2 : ATS 2008 : VISCOSITE DE L’EAU PFD, VITESSE LIMITE
Un grain de sable sphérique, de rayon 𝑅 = 0,050 mm, de volume 4
3𝜋𝑅3, de masse volumique
𝜌 = 2,6.103 kg.m-3, tombe verticalement en chute libre dans de l’eau, sans vitesse initiale.
On donne l’accélération de la pesanteur 𝑔 = 9,8 m.s-2.
On notera Oz l’axe vertical descendant et 𝑢𝑧 un vecteur unitaire sur cet axe.
Ce grain de sable subit, outre son poids, une force exercée par l’eau qui, dans les conditions de l’expérience,
se décompose en deux termes :
• Une force verticale, dirigée vers le haut, d’expression 𝐹1 = −
4
3 𝜋 𝑅3 𝜌𝑒 𝑔 𝑢𝑧 où 𝜌𝑒 est la masse
volumique de l’eau (ρe = 1,0.103 kg.m-3) ;
• Une force de frottement qui s’oppose au mouvement et dont l’expression est 𝐹2 = −6 𝜋 𝜂 𝑅 𝑣 où
η est un coefficient appelé coefficient de viscosité et 𝑣 le vecteur vitesse du grain de sable.
Le vecteur vitesse du grain de sable s’écrit 𝑣 = 𝑣 𝑢𝑧 .
1. Déterminer l’équation différentielle vérifiée par v. On notera ∆ρ = ρ – ρe.
2. Représenter l’évolution de v en fonction du temps.
3. Montrer que le grain de sable atteint une vitesse limite vlim que l’on exprimera en fonction de R, g, ∆ρ
et η. On mesure vlim = 8,7.10-3 m.s-1. Calculer numériquement la viscosité de l’eau dans les conditions de
l’expérience (l’unité de viscosité dans le système international est le Pa.s).
4. A partir de quelle date la bille atteint 95% de sa vitesse limite ? Le régime transitoire est-il facilement
observable à l’œil nu ?
◼ SUJET MK3 : ATS 2016 : STABILITE D’UN NUAGE TEM, VITESSE LIMITE
On cherche à comprendre dans cette partie pourquoi les gouttelettes de la partie inférieure d’un nuage ne tombent pas. On supposera dans cette partie que l’air est immobile dans le référentiel galiléen terrestre et que sa masse volumique reste constante. On considère la chute d’une gouttelette d’eau de rayon 𝑟 et de masse volumique 𝜌𝑒𝑎𝑢 = 103𝑘𝑔.𝑚−3 supposée constante, située initialement à une altitude 𝐻 = 500 𝑚 au-dessus de la surface de la Terre avec une vitesse initiale 𝑣0 nulle. On supposera par ailleurs que la
résultante des forces de frottements exercées par l’air sur la goutte suit la loi de Stokes : 𝑓 = −6𝜋𝜂𝑎𝑖𝑟𝑟𝑣 où 𝜂𝑎𝑖𝑟 correspond à la viscosité dynamique de l’air et 𝑣 à la vitesse de la gouttelette. On négligera la poussée
d’Archimède s’exerçant sur la gouttelette. On donne : 𝜂𝑎𝑖𝑟 ≃ 2. 10−5 𝑃𝑎. 𝑠.
Aide aux calculs : 1
9 ≃ 0,11
1) Exprimer la puissance 𝑃 des forces de frottement exercées par l’air.
2) En appliquant le théorème de l’énergie mécanique, établir l’équation différentielle vérifiée par la vitesse. En déduire que la gouttelette atteint une vitesse limite
𝑣𝑙𝑖𝑚 =2𝑟2
9𝜂𝑎𝑖𝑟𝜌𝑒𝑎𝑢𝑔
3) Pour une gouttelette de rayon 𝑟 = 0,01 𝑚𝑚, calculer 𝑣𝑙𝑖𝑚. En supposant que cette vitesse limite est atteinte très rapidement, évaluer la durée de chute d’une gouttelette de rayon 𝑟 = 0,01 𝑚𝑚 depuis la base nuage à 𝐻 = 500 𝑚 jusqu’au sol.
4) Une gouttelette de ce rayon atteint-elle réellement le sol ? Justifier que le nuage conserve son humidité.
5) En supposant à présent que les gouttes d’eau ont un rayon 𝑟 = 1 𝑚𝑚, calculer la valeur limite de vitesse de chute. Cette valeur paraît-elle plausible ?

Révisions écrits ATS - Mécanique 5 / 46
◼ SUJET MK4 : ATS 2017 : LEVITATION STATIQUE PFD, VITESSE LIMITE
Le plasma est un milieu ionisé. Les ions du plasma sont soumis au champ électrique créé par les électrodes
et sont attirés ou repoussés vers ces dernières. Ces interactions électriques sont utilisées pour « bombarder
» des substrats (échantillons de silicium par exemple) éventuellement déposés sur les électrodes. Ce procédé
permet alors le dopage, le traitement de surface ou la gravure du substrat. Chacune de ces applications
conduit à l’éjection d’un peu de matière du substrat qui se retrouve alors dans le plasma : on obtient un
plasma « sale » ou « dusty plasma ». Ces particules en suspension dans le plasma s’agglomèrent et forment
des poussières pouvant être indésirables. Pour l’industrie de la microélectronique, ces particules doivent être
impérativement éjectées à l’arrêt du plasma afin d’éviter qu’elles ne se retrouvent sur le substrat qui vient
d’être traité (transistor par exemple).
Nous allons étudier une technique d’éjection qui a été mise au point dans le réacteur PKE. Des grains de
référence ont été injectés au centre du réacteur contenant un gaz d’argon non ionisé. Chaque grain est de
charge 𝑞 < 0, de masse 𝑚 et dans le champ de pesanteur terrestre 𝑔 .
Lévitation statique
Pour assurer la lévitation statique,
on utilise un champ électrique �� =
𝐸 𝑢𝑧 vertical, supposé uniforme,
stationnaire et créé par le jeu
d’électrodes.
1. Ecrire, dans le référentiel lié au
réacteur et supposé galiléen, l’équation scalaire permettant d’assurer la lévitation statique d’un grain.
On négligera l’effet de la poussée d’Archimède verticale du gaz d’argon sur le grain et on utilisera le
repérage de la figure 3.
2. Quel doit être le signe de �� ? Justifier.
Etude dynamique
Nous allons considérer le mouvement horizontal permettant l’éjection des grains en lévitation présents dans
le réacteur. Soit un grain de masse 𝑚 soumis aux forces suivantes :
- La force de thermophorèse qui sera donnée par 𝐹𝑡ℎ = 𝐹 𝑢𝑦 avec pour simplifier, 𝐹 > 0 considéré constant
pour tout le mouvement,
- La force de friction liée à son déplacement dans le gaz d’argon : 𝐹𝑓 = −𝑘 𝑣𝑔 avec 𝑘 > 0 constante et 𝑣𝑔
donnant la vitesse horizontale du grain dans le référentiel lié au réacteur et supposé galiléen.
Cette dernière partie sera traitée à l’aide du principe fondamental de la dynamique avec le repérage
présenté à la figure 3.
3. Exprimer, en la justifiant soigneusement, l’équation différentielle vérifiée par la vitesse instantanée
𝑣𝑔(𝑡).
4. Résoudre cette équation différentielle et proposer alors une expression de 𝑣𝑔(𝑡) sachant que 𝑣𝑔(0) =
0.
5. Tracer l’allure de 𝑣𝑔(𝑡) en faisant apparaitre un temps, noté 𝜏, caractéristique de la mise en mouvement.
On donnera l’expression de 𝜏 et de la vitesse limite 𝑣𝑔𝑙 vers laquelle peut tendre la vitesse du grain.
6. Exprimer la position 𝑦(𝑡) sachant que 𝑦(0) = 0.
7. Donner l’expression du temps 𝑡𝑓 pour lequel un grain, située initialement en (𝑥 = 0, 𝑦 = 0, 𝑧 = 𝑑 2⁄ )
atteint la position (𝑥 = 0, 𝑦 = 𝑎 2⁄ , 𝑧 = 𝑑 2⁄ ) sachant que 𝑡𝑓 ≫ 𝜏.

Révisions écrits ATS - Mécanique 6 / 46
◼ SUJET MK5 : D’APRES EPITA/IPSA/ESME – 2018 : SEDIMENTATION DE PARTICULES SOUS L'EFFET DE LA GRAVITE
PFD, VLIM, TEM
Données numériques relative au problème
Accélération de la pesanteur au niveau du sol : 𝑔 ≃ 10 𝑚. 𝑠−2
Viscosité dynamique de l’air : 𝜂 ≃ 1,8. 10−5 𝑃𝑎. 𝑠
Masse volumique typique des particules considérées : 𝜌𝑝 = 2,5. 103 𝑘𝑔.𝑚−3
Masse volumique de l’air : 𝜌𝑎𝑖𝑟 = 1,3 𝑘𝑔.𝑚−3
Formulaire
Volume d’une sphère de rayon 𝑅 : 4
3𝜋𝑅3
Aide aux calculs
5
9 × 1,8≃ 0,3 ln(100) ≃ 4,6
Introduction
Dans cette épreuve, on s'intéresse au problème de pollution aux particules fines. Principalement, on étudie
le mouvement de particules solides sphériques fines présentes dans l'air, de taille microscopique ou
nanoscopique. Ces particules sont classées en catégories suivant leur taille la catégorie PM100 regroupe les
particules de diamètres compris entre 10 𝜇𝑚 et 100 𝜇𝑚, PM10 les particules de diamètre compris entre
2,5 𝜇𝑚 et 10 𝜇𝑚…
L'origine de ces particules fines est diverse : pollen, trafic routier, industrie, agriculture, combustions…
L'impact sur la santé est en souvent d'autant plus important que les particules sont fines car elles peuvent
plus aisément pénétrer à travers l'arbre respiratoire jusqu'aux alvéoles pulmonaires, et provoquer des
inflammations, allergie, cancers…
Ce problème étudie le mouvement de ces particules dans une atmosphère au repos.
Considérons l'atmosphère de masse volumique 𝜌𝑎𝑖𝑟 dans lequel se
trouvent des particules sphériques solides homogènes de rayon 𝑅 et de
masse volumique 𝜌𝑝 constante. Dans un premier temps on supposera que
l'interaction entre l'air et la particule est uniquement la somme de la
poussée d'Archimède et de la force de frottement visqueux.
• La poussée d’Archimède est une interaction particulière que subit un
corps plongé dans un fluide (liquide ou gaz) soumis à un champ de gravité. Cette interaction est conservative
et provient de l'augmentation de la pression du fluide avec la profondeur. Soit 𝑉𝑝, le volume de la particule
et 𝜌𝑎𝑖𝑟 la masse volumique de l'air, alors si on choisit l’origine des énergies potentielles en 𝑧 = 0, l’énergie
potentielle liée à la poussée d’Archimède est de la forme : 𝐸𝑝,𝐴 = 𝜌𝑎𝑖𝑟𝑉𝑝𝑔𝑧
• On admet que dans la limite de faibles vitesses de la particule par rapport à l'air, la force de frottement
visqueux puisse être modélisée par une puissance dissipative : 𝑃𝑓 = −6𝜋𝜂𝑅𝑣2avec 𝑣 la vitesse de la particule
par rapport à l'air et 𝜂 la viscosité de l'air.
Les particules sont initialement à l'altitude 𝐻, sans vitesse initiale dans le référentiel terrestre. On considérera
que l'on reste à des altitudes suffisamment faibles pour pouvoir négliger tout changement des propriétés de
l'air.
1. Donner la dimension puis l’unité du système international de 𝜂.

Révisions écrits ATS - Mécanique 7 / 46
2. Donner l’expression littérale de la masse 𝑚 de la particule solide en fonction de son rayon 𝑅 et de sa
masse volumique 𝜌𝑝. En déduire l’expression littérale de son énergie potentielle de pesanteur 𝐸𝑝,𝑝𝑒𝑠 en
fonction 𝑔, 𝑧, 𝑅 et 𝜌𝑝.
3. Comparer l’énergie potentielle de pesanteur 𝐸𝑝,𝑝𝑒𝑠 à l’énergie potentielle de la poussée d’Archimède
𝐸𝑝,𝐴. Que peut-on dire en conclure ?
4. Établir alors l'équation différentielle à laquelle obéit la vitesse 𝑣(𝑡) de la particule, dans son
mouvement selon l’axe 𝑂𝑧, et la mettre sous la forme :
𝑑𝑣
𝑑𝑡+
𝑣
𝜏=
𝑣𝑙𝑖𝑚
𝜏 (1)
Identifier les constantes 𝜏 et 𝑣𝑙𝑖𝑚 et les exprimer en fonction des paramètres de l'énoncé.
5. Résoudre l’équation différentielle et déterminer 𝑣(𝑡).
6. Identifier, parmi les propositions suivantes, en s'appuyant sur l'allure de la courbe 𝑣 = 𝑓(𝑡) donnée
en en annexe à rendre avec la copie, le régime d'évolution du système étudié.
a) régime divergent : la valeur de la grandeur physique étudiée tend à augmenter (en valeur absolue) au
cours du temps.
b) régime convergent : la valeur de la grandeur physique étudiée tend vers une valeur limite constante ;
l'évolution du système présente alors deux phases distinctes : un régime transitoire et un régime établi ou
permanent.
c) régime périodique : la valeur de la grandeur physique étudiée se répète de manière identique à intervalles
de temps égaux.
7. Déterminer graphiquement la constante de temps 𝜏 du système.
8. Calculer 𝜏 pour 𝑅 = 1 𝜇𝑚 à l’aide de l’expression littérale obtenue question 4.
9. Montrer que l’instant 𝑡1 pour lequel 𝑣(𝑡1) est-elle égale à 99% de 𝑣𝑙𝑖𝑚 vaut :
𝑡1 = 𝜏. ln 100 ≃ 5 𝜏. Faire l’application numérique et conclure.
On admet, pour la suite du problème, que l'on peut négliger la durée du régime transitoire.
10. Comment se simplifie alors l’expression de 𝑣(𝑡) ?
11. En déduire l'expression de 𝑧(𝑡).
On cherche maintenant le temps de sédimentation 𝑇𝑠(𝐻), c'est-à-dire le temps nécessaire à la particule pour
tomber au sol depuis une altitude initiale 𝐻.
12. Donner l'expression littérale de 𝑇𝑠(𝐻) en fonction des paramètres du problème.
13. En prenant 𝐻 = 500 𝑚, on obtient les valeurs suivantes :
Catégorie de particule PM100 PM10 PM2,5 PM1 PM0,1
Rayon 𝑅 25 𝜇𝑚 2,5 𝜇𝑚 1,0 𝜇𝑚 0,5 𝜇𝑚 0,05 𝜇𝑚
𝑇𝑠(𝐻) pour 𝐻 = 500 𝑚 44 𝑚𝑖𝑛𝑢𝑡𝑒𝑠 3,1 𝑗𝑜𝑢𝑟𝑠 19 𝑗𝑜𝑢𝑟𝑠 77 𝑗𝑜𝑢𝑟𝑠 21 𝑎𝑛𝑠
Commenter.
Annexe Questions 6 et 7

Révisions écrits ATS - Mécanique 8 / 46
◼ SUJET MK6 : ATS 2004 : MOUVEMENT D’UN ANNEAU EM ET GRAPHE D’EP
On considère le dispositif de la figure ci-dessous, où un
anneau assimilable à un point matériel M de masse 𝑚 se
déplace solidairement à une piste fixe formée de deux
parties circulaires (1) et (2) de rayon 𝑅1 et 𝑅2, de centre C1
et C2, dans un plan vertical. On supposera 𝑅2 > 𝑅1.
On repère la position de l’anneau par un angle 𝜃 pris à
partir de C1 pour son mouvement sur la partie (1), et à
partir de C2 pour son mouvement sur la partie (2).
Sur la partie (1), 𝜃 varie entre −𝜋
2 et 𝜋. Sur la partie (2), 𝜃
varie entre 𝜋 et 5𝜋
2.
On note 𝑔 la constante de gravitation terrestre.
Dans tout le problème, on suppose le mouvement de l’anneau s’effectue sans frottements.
On suppose dans un premier temps que le mouvement de l’anneau s’effectue sur la partie (1) du dispositif.
Soit 𝑂𝑧 l’axe vertical descendant. On choisit son origine en B.
A. Mouvement d’un anneau sur une piste circulaire
A l’instant 𝑡 = 0, l’anneau est au point E (𝜃 = 0) avec une vitesse angulaire initiale positive (𝑑𝜃
𝑑𝑡)0
.
1. L’énergie mécanique se conserve-t-elle ? En déduire l’expression de (𝑑𝜃
𝑑𝑡)2
à un instant quelconque en
fonction des données du problème.
On émet pour les deux questions qui suivent l’hypothèse que 𝜃 est suffisamment petit pour assimiler sin𝜃 à
𝜃.

Révisions écrits ATS - Mécanique 9 / 46
2. Dériver l’expression précédente par rapport au temps afin de déterminer l’équation différentielle qui
régit de 𝜃(𝑡). Exprimer la valeur maximale de 𝜃(𝑡) et 𝜃max.
3. Application numérique : 𝑅1 = 1 mm, 𝑔 = 10 m.s-2 et (𝑑𝜃
𝑑𝑡)0
= 1 rad.s-1. Calculer la pulsation 𝜔, la
période 𝑇 et l’amplitude maximale 𝜃max du mouvement.
L’approximation sin 𝜃 = 𝜃 est elle valable ?
B. Mouvement de l’anneau sur la piste complète
4. Exprimer l’énergie potentielle de pesanteur 𝐸𝑝 de l’anneau M en supposant 𝐸𝑝 = 0 au point B (𝜃 =
𝜋). On distinguera les cas –𝜋
2 < 𝜃 < 𝜋 et 𝜋 < 𝜃 < 2𝜋.
5. Tracer l’allure de 𝐸𝑝 (𝜃).
6. Déterminer les positions angulaires d’équilibre de l’anneau, en précisant leur stabilité.
L’anneau étant initialement en A (𝜃 = −𝜋
2), il est lancé à une vitesse 𝑣0 sur le support fixe.
7. A quelle condition sur la vitesse 𝑣0 l’anneau peut-il atteindre le point F ?
8. Cette condition étant remplie, donner l’expression de sa vitesse 𝐹 en F (𝜃 = 2𝜋), en fonction des
données du problème.
9. A quelle condition sur 𝑣0, l’anneau sort-il de la piste en S (𝜃 =5𝜋
2) ?
◼ SUJET MK7 : ATS 2014 : ETUDE D’UN SATELLITE DE TELEDETECTION TERRESTRE EM ET GRAPHE D’EP
La télédétection par satellite est utilisée en météorologie, climatologie et en cartographie. Nous étudions
dans ce sujet un satellite de télédétection en orbite autour de la Terre.
On étudie dans cette partie le mouvement du satellite, assimilé à un point
matériel M, autour de la Terre de rayon 𝑅T = 6,4.103 km et de centre O.
L’étude est réalisée dans le référentiel géocentrique ℛ𝑔(𝑂, 𝑖 , 𝑗 , �� ) supposé
galiléen au cours du temps noté 𝑡. On suppose que la trajectoire du
satellite de masse 𝑚 = 4,0.103 kg est plane et se fait dans le plan (𝑂, 𝑖 , 𝑗 )
représenté sur la figure 2.
La partie C est indépendante des 2 parties précédentes.
A. Mise en orbite circulaire du satellite
1. On noté 𝑔0 = 10 m.s-2 la norme de l’accélération de pesanteur à la surface de la Terre. L’énergie
potentielle Ep(r) associée à l’interaction gravitationnelle F s’exprime sous la forme Ep(r) = −g0mRT
2
r.
En déduire l’expression de l’interaction 𝐹 exercée par la Terre sur le satellite en fonction de g0, 𝑚, RT et
𝑟. L’interaction gravitationnelle est-elle attractive ou répulsive ? Dans la suite, on supposera que le
satellite est soumis uniquement à 𝐹 .
La mise en orbite terrestre d’un satellite se fait en deux étapes :
• phase balistique : le satellite s’éloigne de la Terre sur une ellipse de foyer le centre de la Terre jusqu’à
l’apogée ;
• phase de satellisation : le satellite accélère pour obtenir une trajectoire circulaire autour de la Terre.
Figure 2

Révisions écrits ATS - Mécanique 10 / 46
On considère que le satellite est placé en orbite circulaire de rayon r constant autour de la Terre. Il a une
vitesse 𝑣 = √𝑔0𝑅𝑇
2
𝑟
2. En déduire l’expression des énergies cinétique Ec et mécanique Em du satellite en fonction de 𝑚, g0, RT
et 𝑟. Justifier le signe de Em.
3. Application numérique : calculer l’énergie mécanique du satellite pour une trajectoire circulaire de rayon
rb, = 8,0.103 km, puis pour un rayon rh = 40.103 km. Rappel : 64 = 26.
B. Etude énergétique du satellite
On suppose ici que la trajectoire du satellite n’est pas nécessairement
circulaire (r peut varier). L’énergie mécanique du satellite est constante
au cours du mouvement et elle se met sous la forme :
𝐸𝑚 =1
2𝑚 ��2 +
𝐿𝑂2
2 𝑚 𝑟2− 𝑔0𝑚
𝑅𝑇2
𝑟
4. Définir le référentiel et le système d’étude. Le référentiel est-il
galiléen ? Si oui, sous quelles conditions ?
5. Déterminer la dimension des constantes L0 et 𝑔0.
6. On appelle énergie potentielle effective la quantité :
𝐸𝑝,𝑒𝑓𝑓(𝑟) = 𝐸𝑚 −1
2𝑚 ��2
Au cours du mouvement, les valeurs du rayon 𝑟 sont données par l’inégalité 𝐸𝑝,𝑒𝑓𝑓(𝑟) ≤ 𝐸𝑚. Expliquer
ce résultat.
7. Le graphe de 𝐸𝑝,𝑒𝑓𝑓(𝑟) pour une valeur donnée de 𝐿𝑂 est représenté figure 3. On montre que la
trajectoire du satellite est nécessairement une conique : circulaire, elliptique, parabolique ou
hyperbolique.
a) A quelle énergie Em1 ou Em2 peut correspondre une trajectoire elliptique ? une trajectoire
hyperbolique ?
b) Pour quelle valeur particulière de Em la trajectoire est-elle circulaire ?
C. Mise en orbite haute du satellite
Pour atteindre des trajectoires de très hautes altitudes, le satellite est
dans un premier temps placé sur une trajectoire circulaire basse
(rb = 8,0.103 km) puis, dans un deuxième temps, sur une trajectoire
circulaire haute (rh = 40.103 km) comme illustré sur la figure 4.
Pour passer de la trajectoire basse à la trajectoire haute, on utilise une
trajectoire de transfert elliptique dont l’un des foyers est le centre de
la Terre O : son périgée P est situé sur l’orbite basse et son apogée A
sur l’orbite haute.
Le changement d’orbite s’effectue en réalisant des variations brutales
de vitesse du satellite à l’aide des moteurs qui correspondent à des variations d’énergie
mécanique que l’on cherche à déterminer.
Figure 3 – Allure de l’énergie potentielle
effective en fonction de r
Figure 4

Révisions écrits ATS - Mécanique 11 / 46
On considère désormais le satellite parcourant la trajectoire elliptique de transfert. Son énergie mécanique
se met sous la forme :
𝐸𝑚,𝑡 = −𝑔0𝑚 𝑅𝑇
2
2 𝑎
Avec a, le demi-grand axe de l’ellipse de transfert,
m la masse du satellite et RT, le rayon terrestre et
𝑔0 une constante.
8. Relever sur la figure 5 la valeur de l’énergie
mécanique 𝐸𝑚,𝑡 du satellite sur la trajectoire
de transfert elliptique. Justifier.
Pour changer de trajectoire le satellite, il faut
modifier la valeur de son énergie mécanique.
Durant cette phase le principe de conservation de
l’énergie n’est plus vérifié. Ce sont les moteurs du
satellite qui vont permettre d’accélérer ou de ralentir le satellite.
9. Relever sur la figure 5 la valeur de l’énergie mécanique 𝐸𝑚,𝑏 du satellite sur l’orbite circulaire basse de
rayon rb = 8,0.103 km. De même relever la valeur de l’énergie mécanique 𝐸𝑚,ℎ du satellite sur l’orbite
circulaire haute de rayon rh = 40.103 km.
10. En déduire la variation d’énergie mécanique ∆𝐸𝑚𝑃 à communiquer au satellite pour passer en P de
l’orbite circulaire basse à l’orbite elliptique de transfert. Sachant que 1 kg de carburant permet de fournir
50 MJ, déterminer la masse mc de carburant nécessaire.
11. Connaissez-vous un carburant utilisé dans moteurs-fusées pour l’aérospatiale ? Qu’appelle-t-on orbite
géostationnaire ? Connaissez-vous l’altitude de cette orbite ?
D. Chute du satellite
Les satellites d’observation retombent inéluctablement sur la Terre. Lors des chocs avec les molécules
contenues dans les couches supérieures de l’atmosphère, le satellite est soumis à une force de frottement 𝑓
de puissance 𝑃 = −𝑘 𝑣2.
Supposons que le satellite est en orbite circulaire. Au cours de sa chute, à chaque tour effectué, la variation
d’altitude est suffisamment faible pour supposer que les expressions de l’énergie mécanique 𝐸𝑚(𝑡) =
−𝑚 𝑔0𝑅𝑇
2
2 𝑟(𝑡) et de la vitesse 𝑣2(𝑡) = 𝑔0
𝑅𝑇2
𝑟(𝑡) restent valables.
12. À l’aide de l’expression de la vitesse, déterminer la durée 𝑇 nécessaire au satellite pour effectuer un
tour de l’orbite circulaire de rayon 𝑟. Quelle est le nom de la relation obtenue ?
13. Montrer que :
𝑑 (1𝑟)
𝑑𝑡= −
��
𝑟2
14. À 1’aide du théorème de l’énergie mécanique, montrer que le rayon 𝑟(𝑡) est solution de l’équation
différentielle
𝑑𝑟
𝑑𝑡+
1
𝜏𝑟(𝑡) = 0
où 𝜏 est une constante que l’on exprimera en fonction de 𝑘 et 𝑚. Montrer que 𝜏 est bien homogène à un
temps.
Figure 5 – 𝐸𝑝,𝑒𝑓𝑓(𝑟) pour les 3 orbites

Révisions écrits ATS - Mécanique 12 / 46
15. En déduire l’expression de 𝑟(𝑡). On supposera que le satellite est à l’instant 𝑡 = 0 sur une orbite
circulaire de rayon r0.
16. Représenter graphiquement sur votre copie l’évolution de 𝑟(𝑡). On fera apparaître notamment les
grandeurs r0 et 𝜏 et on négligera RT devant r0.
◼ SUJET MK9 : D’APRES CONCOURS GENERAL – 2018 : PHYSIQUE PENDANT LES FETES
On souhaite étudier l’éjection du bouchon de liège lors de l’ouverture d’une bouteille de champagne ainsi
que la montée des bulles de champagne dans le verre.
Aide aux calculs
440
8,31 × 28≈ 2
4
9 × 1,1≈ 0,4 √9 × 1,1 × 10−7 ≈ 10−3
Données
Champ de pesanteur : 𝑔 = 10 𝑚. 𝑠−2 ;
Constante des gaz parfaits : 𝑅 = 8,31 𝐽. 𝐾−1.𝑚𝑜𝑙−1 ;
Masse molaire de l’oxygène 𝑂 : 𝑀𝑂 = 16 𝑔.𝑚𝑜𝑙−1 ;
Masse molaire du carbone 𝐶 : 𝑀𝐶 = 12 𝑔.𝑚𝑜𝑙−1.
A- Éjection du bouchon de liège
La question suivante n’est pas guidée et demande de l’initiative de la part du candidat. Une rédaction
complète et soignée de la problématique posée est attendue, et toutes les pistes de recherche explorées par
le candidat doivent être consignées sur sa copie. Si elles sont pertinentes, elles seront valorisées. Il est conseillé
au candidat de ne pas excéder 10 minutes de réflexion sur cette question.
1. Lors de l’ouverture d’une bouteille de champagne, le bouchon peut s’avérer être un
projectile dangereux en raison de la forte pression qui règne à l’intérieur de la bouteille (à
température ambiante de 20°𝐶, elle avoisine 6 𝑏𝑎𝑟𝑠).
Estimer jusqu’à quelle hauteur il est possible d’amener un bouchon de liège dans l’air
lorsqu’il est éjecté du goulot d’une bouteille pleine.
B- Etude de la montée des bulles de champagne
On cherche à étudier la trajectoire des bulles une fois en liberté au sein du champagne assimilable à un liquide
de masse volumique 𝜌ℓ = 1,00 𝑔. 𝑐𝑚−3.
On se place dans le référentiel terrestre, supposé galiléen, auquel on adjoint un repère d’espace (𝑂, 𝑒𝑧 )
vertical orienté vers le haut, où 𝑒𝑧 est un vecteur unitaire. Lors de la montée, la bulle assimilée à une sphère
de rayon 𝑟 et de masse constante est soumise, outre son poids, à :
• la poussée d’Archimède, notée �� ;
• une force de frottement fluide, appelée force de Stokes, traduisant la résistance du liquide, de norme
𝑓 = 6𝜋𝜂𝑟𝑣, où 𝜂 est la viscosité du champagne et vaut 𝜂 = 1,1. 10−3 𝑈𝑆𝐼 à la température 𝑇 = 280 𝐾 et 𝑣
la vitesse de la bulle.
2. Par analyse dimensionnelle exprimer l'unité de la viscosité 𝜂 en fonction des unités de base du système
international.

Révisions écrits ATS - Mécanique 13 / 46
3. On suppose que les bulles de champagne ne contiennent que du dioxyde de carbone 𝐶𝑂2, assimilable à
un gaz parfait à la pression 𝑃𝐶𝑂2 = 1,00 𝑏𝑎𝑟. Déterminer l’expression de la masse volumique 𝜌𝐶𝑂2 de la
bulle en fonction de 𝑃𝐶𝑂2, 𝑀𝐶𝑂2, 𝑅 et 𝑇. Faire l’application numérique.
4. En déduire que le poids de la bulle est négligeable devant la poussée d’Archimède.
5. En appliquant la deuxième loi de Newton à la bulle, établir l’équation différentielle vérifiée par la bulle. On
la mettra sous la forme :
𝑑𝑣
𝑑𝑡+
𝑣
𝜏=
𝑣𝑙𝑖𝑚
𝜏
où 𝜏 et 𝑣𝑙𝑖𝑚 sont des constantes dont on donnera l’expression en fonction de 𝜌ℓ la masse volumique du
liquide, 𝜌𝐶𝑂2 celle du dioxyde de carbone gazeux, 𝜂, 𝑟 et 𝑔.
6. Quelle est la dimension de 𝜏 ? Justifier.
7. En supposant que la vitesse initiale de la bulle est nulle, déterminer l’expression de 𝑣 (𝑡).
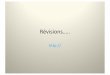
Le graphe ci-dessous représente la variation de la vitesse 𝑣 de la bulle au cours du temps. (𝑇) est la tangente
à la courbe 𝑣 = 𝑓(𝑡) à l'instant de date 𝑡 = 0.
8. Expliquer physiquement pourquoi la vitesse augmente pendant un bref régime transitoire, pour ensuite
devenir et rester constante à la valeur 𝑣𝑙𝑖𝑚. Déterminer graphiquement cette valeur.
9. Donner l’expression du rayon 𝑟 de la bulle en fonction de 𝑣𝑙𝑖𝑚. En déduire la valeur du rayon 𝑟 d’une bulle
de champagne.
10. Déterminer graphiquement la valeur numérique de 𝜏. Quelle approximation peut ainsi être effectuée ?
◼ SUJET MK10 : ATS 2015 : BREVE HISTOIRE D’UN PROTON ACCELERE PAR LE COMPLEXE D’ACCELERATEURS DU
LHC AU CERN EM ET EP
Dans cette partie, nous étudions la trajectoire des protons dans le Large Hadron Collider. Le LHC est formé d’une succession d’accélérateurs, d’énergies toujours croissantes. Chaque accélérateur injecte un faisceau dans la machine suivante, qui prend le relais pour porter ce faisceau à une énergie encore plus élevée, et ainsi de suite. Tous les accélérateurs de particules sont composés de la même façon : une source de
𝑣 (𝑒𝑛 𝑚. 𝑠−1)
𝑡 (𝑒𝑛 𝑚𝑠)
(𝑇)
𝑣 = 𝑓(𝑡) 2
1,5
1
0,5
2,5

Révisions écrits ATS - Mécanique 14 / 46
particules, des champs électriques accélérateurs, des champs magnétiques de guidage et finalement des détecteurs pour observer les particules et leurs collisions.
Masse du proton 𝑚𝑝 ≈ 1,6. 10−27𝑘𝑔
Masse de l’électron 𝑚𝑒 = 9,11. 10−31𝑘𝑔
Charge électrique élémentaire 𝑒 = 1,6. 10−19𝐶
Aide aux calculs : √(105 + 9.106) ≈ 3,0. 103
2.1 Particule dans un champ électrique constant et uniforme
1. Quelle est la force que subit un proton plongé dans une région de
l’espace où règne un champ électrique uniforme �� ?
2. Montrer que l’on peut négliger le poids du proton devant la force
générée par un champ 𝐸 = 100𝑘𝑉.𝑚−1.
On prendra 𝑔 = 10 𝑁. 𝑘𝑔−1.
3. En utilisant le principe fondamental de la dynamique appliqué à
un proton, exprimer l’accélération que ressent un proton dans une
zone de l’espace ou règne un champ électrique uniforme �� .
4. La zone de l’espace où règne le champ �� a une longueur 𝐿. En considérant que le potentiel 𝑉0 du plan
𝑥 = 0 est nul, exprimer le potentiel 𝑉𝐿 du plan 𝑥 = 𝐿.
5. En supposant que le proton entre dans la zone de champ avec une énergie cinétique négligeable,
exprimer l’énergie cinétique du proton sortant de la zone d’accélération, en fonction de E puis de 𝑉𝐿.
2.2 Un accélérateur linéaire de particules : le Linac 2
L’accélérateur linéaire 2 (Linac 2) constitue le point de départ des protons utilisés dans les expériences
menées au CERN.
Les protons passent dans une série de conducteurs métalliques coaxiaux. On considère que le champ est nul
à l’intérieur des conducteurs. Ces protons sont accélérés par une tension maximale 𝑈𝐶 toutes les fois qu’ils
passent d’un tube à l’autre. On considérera que la distance entre deux tubes est négligeable par rapport à la
longueur des tubes. Les protons sont injectés en O avec une vitesse 𝑣0 = 𝑣0 𝑢𝑧 parallèle à l’axe de
l’accélérateur et générée par une tension pré-accéleratrice 𝑈0.
6. Quel est l’accroissement d’énergie cinétique de ces protons au passage entre deux tubes voisins ?
7. Exprimer leur énergie cinétique à la sortie du n-ième tube en fonction de 𝑈𝐶 et 𝑈0.
8. Calculer la valeur de la vitesse des protons à la sortie du 10ème tube pour 𝑈0 = 200 𝑘𝑉, 𝑈𝐶 = 2000 𝑘𝑉
.
9. Sachant qu’une particule est considérée comme relativiste lorsque sa vitesse atteint le tiers de la vitesse

Révisions écrits ATS - Mécanique 15 / 46
de la lumière, ces protons sont-ils relativistes ?
2.3 Du linac 2 au synchroton à protons (PS)
Un élément fondamental du complexe accélérateur est le synchrotron à protons (PS).
Pendant une courte période de l’histoire des grands instruments, le PS a été l’accélérateur produisant les
plus hautes énergies du monde. Aujourd’hui, il sert principalement à alimenter le LHC.
On considère un proton injecté en A dans le synchrotron où règne un champ magnétique statique et uniforme
𝐵0 = 𝐵0 𝑒𝑧 . A 𝑡 = 0 sa vitesse 𝑣0 est perpendiculaire au champ magnétique conformément à la figure 4.
10. Donner le nom et l’expression vectorielle de la force que subit le proton soumis au champ magnétique
𝐵0 .
Pour les questions suivantes, on considère que le proton n’est soumis qu’à cette force.
11. Reproduire la figure 4 sur votre copie afin de représenter
la force magnétique subie par le proton en A. Exprimer la
norme de cette force.
12. Montrer que le travail associé à cette force est nul. En
déduire que le mouvement du proton est uniforme.
On montre qu’en présence d’un champ magnétique, la
trajectoire du proton est un cercle de rayon 𝑅 =𝑚𝑝𝑣0
𝑒 𝐵0.
13. Quelle est la nature du mouvement du proton après sa
sortie de la zone de champ magnétique ?
◼ SUJET MK 12 : ATS 2012 : DETECTION DES CHOCS FRONTAUX ET PROTECTION DES PASSAGERS : L’AIRBAG
OSCILLATIONS LIBRES
À bord d’un véhicule, l’airbag est aujourd’hui un des éléments essentiels permettant d’assurer la protection
des passagers lors d’un accident.
Le détecteur de chocs qui déclenche l’ouverture de l’airbag est par exemple constitué d’une masse mobile
aimantée M retenue par un ressort.
Au cours d’un choc, plus la décélération est importante, plus la masse se déplace. Si le déplacement est
suffisamment important, la masse aimantée met en contact électrique deux lames métalliques, ce qui permet
ainsi de déclencher l’ouverture de l’airbag.
Figure 1 : Schéma d’un détecteur de choc et photo du détecteur sur son circuit électrique
On note le référentiel terrestre 𝑅T (𝑇, 𝑢𝑋 , 𝑢𝑌 , 𝑢𝑍 ) supposé galiléen. T est un point de la route et (𝑢𝑋 , 𝑢𝑌 , 𝑢𝑍 )
une base fixe par rapport à la route.
1. Rappeler la définition d’un référentiel galiléen.

Révisions écrits ATS - Mécanique 16 / 46
2. Sous quelles hypothèses de temps et d’espace le référentiel terrestre peut-il être considéré comme
galiléen ?
Figure 2 : Modélisation
du dispositif de détection des chocs installé dans le véhicule
On associe au véhicule étudié un référentiel mobile 𝑅V (𝑂, 𝑢𝑥 , 𝑢𝑦 , 𝑢𝑧 ).
Le véhicule se déplace à la vitesse 𝑣 𝑣/𝑅𝑇(𝑡) = 𝑣𝑣(𝑡) 𝑢𝑋 par rapport au référentiel terrestre (𝑣𝑣 < 0).
Il est équipé d’un système de détection de chocs dont la masse mobile M peut se déplacer suivant la direction
𝑂𝑥. On note 𝑚 sa masse et 𝑂𝑀 (𝑡) = 𝑥(𝑡) 𝑢𝑥 son vecteur position dans le référentiel 𝑅V.
Un ressort de raideur 𝑘 et de longueur à vide 𝑙0 relie le point O et la masse mobile M qui subit lors de son
déplacement une force de frottement fluide de type 𝐹 = −𝛼 𝑣 où
𝑣 = (𝑑𝑂𝑀
𝑑𝑡)
/𝑅𝑉
On se place dans la suite dans le référentiel mobile lié au véhicule 𝑅V pour étudier le mouvement de la masse
mobile M.
Le véhicule roule à une vitesse v0 suivant la direction −𝑢𝑋 avant de subir un choc frontal à l’instant 𝑡 = 0.
• Phase 1 : 𝑡 ≤ 0, le véhicule se déplace à vitesse constante − v0 :
La longueur du ressort à vide 𝑙0 = 2 cm est inférieure à la longueur du boitier 𝑙.
3. En régime permanent et pour 𝑡 ≤ 0, quelle est la valeur de 𝑥(𝑡 = 0) et de la vitesse 𝑣(𝑡 = 0) =𝑑𝑥
𝑑𝑡(𝑡 = 0) de la masse M dans le référentiel 𝑅V ?
• Phase 2 : 0 ≤ 𝑡 < 𝑡𝑐, le véhicule subit un choc frontal. Sa vitesse passe de − 𝑣0 à 0 en une durée 𝑡c.
4. Lorsque le véhicule s’arrête brutalement, dans quelle direction se déplace la masse M ? Justifier.
5. Déduire du graphe de 𝑣𝑣(𝑡) l’évolution temporelle de l’accélération 𝑎𝑒(𝑡) =𝑑𝑣𝑣
𝑑𝑡 de 𝑅V par rapport à 𝑅T.
On reproduira sur la copie l’évolution temporelle de 𝑣𝑣(𝑡) associée à celle de 𝑎𝑒(𝑡).
Montrer que pour 0 ≤ 𝑡 < 𝑡𝑐, 𝑎𝑒 (𝑡) peut se mettre sous la forme 𝑎𝑒 (𝑡) = 𝑎0 𝑢𝑥 avec 𝑎0 > 0. Préciser
l’expression de 𝑎0.
6. Sur la masse mobile M, s’exerce la force d’inertie, force conservative d’énergie potentielle
𝐸𝑝,𝑓𝑖𝑒 = 𝑚 𝑎0 𝑥 . Déterminer l’énergie mécanique de la masse. Se conserve-t-elle ?
7. En déduire que l’équation différentielle du mouvement de M dans le référentiel 𝑅𝑉 s’écrit :
Figure 3 : Évolution de la vitesse 𝑣𝑣(𝑡) du véhicule

Révisions écrits ATS - Mécanique 17 / 46
𝑑2𝑥
𝑑𝑡2+ 2𝜉𝜔0
𝑑𝑥
𝑑𝑡+ 𝜔0
2𝑥 = 𝜔02𝑥𝑒
On exprimera 𝜔0, 𝜉 et 𝑥𝑒 en fonction de 𝑚, 𝑘, 𝑙0, 𝑎0 et 𝛼.
8. Quelle est la signification physique de la grandeur 𝑥e ? Justifier.
Le système de déclenchement devant être le plus rapide possible, la valeur du coefficient
d’amortissement 𝜉 est inférieure à 1.
9. Montrer que 𝑥(𝑡) peut se mettre pour 0 ≤ 𝑡 < 𝑡𝑐 et 𝜉 < 1 sous la forme :
𝑥(𝑡) = 𝑒− 𝑡𝜏(𝐴 cos(𝜔𝑡) + 𝐵 sin(𝜔𝑡)) + 𝑥𝑒
On exprimera 𝜏 et 𝜔 en fonction de 𝜔0 et 𝜉.
10. À l’aide des conditions initiales en 𝑡 = 0 (voir question 3) montrer que
𝐴 =𝑚𝑎0
𝑘 𝑒𝑡 𝐵 =
𝐴
𝜏𝜔
11. Montrer que la vitesse de la masse M peut se mettre sous la forme :
𝑣(𝑡) = −𝐴(1 + 𝜏2𝜔2
𝜏2𝜔) 𝑒−
𝑡𝜏 sin(𝜔𝑡)
12. Représenter l’évolution temporelle de 𝑥(𝑡) et 𝑣(𝑡) en concordance des temps pour 0 ≤ 𝑡 < 𝑡𝑐. On
supposera que 𝑡𝑐 ≫ 𝑇 =2𝜋
𝜔
À l’instant 𝑡 = 𝑡d > 0, la vitesse de M s’annule pour la première fois, M est alors au plus près du point
O. On note 𝑑 = 𝑥(𝑡 = 𝑡𝑑) la distance minimale qui sépare O de la masse M.
13. Montrer que 𝑡𝑑 =𝜋
𝜔.
14. En déduire l’expression de la distance minimale 𝑑 en fonction de 𝑎0, 𝑚, 𝑘, 𝑙0, 𝜏 et 𝜔.
Si la distance minimale devient inférieure à 𝑙/2 = 𝑙0/2, la masse mobile aimantée se trouve alors sur
le contact électrique qui déclenche l’ouverture de l’airbag.
15. En déduire l’expression de la décélération minimale du véhicule a0,min qui déclenche l’ouverture de
l’airbag en fonction de 𝑙0 , 𝑘,𝑚, 𝜉.
Les caractéristiques du capteur sont les suivantes : 𝑚 = 10 𝑔, 𝜉 = 0,5, 𝑘 = 55 𝑁/𝑚 et 𝑔 = 9, 81 m·s−2.
16. Vérifier que le capteur est capable de détecter des décélérations de 5𝑔.
Lorsque la masse M atteint la position centrale, le contact électrique est établi, une décharge électrique
est transmise au détonateur de l’airbag. Celui-ci va permettre d’enflammer des pastilles d’azoture de
sodium NaN3, réactif explosif, qui se décompose en diazote N2 et en sodium Na.
Le dégagement de diazote gazeux permet le gonflement rapide du coussin d’airbag.
Données : 𝑅 = 8, 314 J.K–1.mol–1, 𝑀(𝑁𝑎) = 23 g.mol–1 et 𝑀(𝑁) = 14 g.mol–1
17. Écrire et équilibrer la réaction chimique d’explosion de NaN3.
Un airbag gonflé contient un volume 𝑉 = 70 𝐿 de gaz supposé parfait à pression et température
ambiante (𝑝 = 1 bar et 𝑇 = 20 °C). Le sodium réagissant immédiatement avec l’environnement, seul le
dégagement de N2 permet le gonflement de l’airbag.
18. Déterminer la quantité de matière N2 nécessaire pour gonfler un airbag.
19. En déduire la quantité de matière puis la masse d’azoture de sodium NaN3 nécessaire.

Révisions écrits ATS - Mécanique 18 / 46
◼ SUJET MK13 : CCP TSI 2013 MODELISATION D’UNE SUSPENSION DE VEHICULE OSCILLATIONS LIBRES
Sur un véhicule, les suspensions ont de multiples fonctions. Elles servent notamment :
• à améliorer le confort des occupants ;
• à améliorer la tenue de route en maintenant le contact entre les roues et le sol malgré ses
irrégularités (amélioration de la sécurité) ;
• à diminuer l’effet, sur l’ensemble des organes mécaniques, des vibrations et impacts dus aux
irrégularités de la route (diminution de l’usure et du risque de rupture).
Il existe différents types de suspensions et, dans ce problème, nous nous intéresserons à un type très répandu
: les suspensions à ressorts. De manière simplifiée, ces suspensions se composent d’un ressort qui assure la
liaison entre les roues (masses non suspendues) et la caisse (masse suspendue) et d’un système
d’amortissement.
Le but de ce problème est d’étudier certaines caractéristiques des suspensions à ressort. En particulier, nous
étudierons les mouvements verticaux du véhicule dans différentes situations : véhicule non amorti, véhicule
amorti en régime libre, véhicule se déplaçant sur un sol non plat…
Pour l’ensemble du problème, le référentiel d’étude est le référentiel terrestre considéré comme galiléen.
Le véhicule est soumis au champ de pesanteur terrestre 𝑔.
Données : champ de pesanteur : 𝑔 = 10 m.s-2
Hypothèses :
tout au long du problème, on considèrera que :
• l’extrémité supérieure du ressort est en contact avec le véhicule et l’extrémité inférieure du ressort
est reliée à une roue qui se trouve en contact avec le sol ;
• la roue reste en contact avec le sol à tout instant ;
• les dimensions de la roue sont telles qu’on la suppose ponctuelle de sorte qu’elle suit parfaitement
le profil de la route, y compris lorsque le sol n’est pas plat.
Notations :
dérivées temporelles : pour une fonction 𝑧(𝑡) les dérivées temporelles seront notées
��(𝑡) =d𝑧(𝑡)
d𝑡 𝑒𝑡 ��(𝑡) =
d2𝑧(𝑡)
d𝑡2
Première partie : suspension sans amortissement
Le véhicule à vide (masse suspendue) est assimilé à une masse 𝑚 = 1,0.103 kg. La suspension est constituée d’un ressort de masse négligeable, de raideur 𝑘 = 1,0.105 N.m-1 et de longueur au repos 𝑙0.
Dans cette 1ère partie, on néglige tout amortissement. On ne s’intéresse qu’au mouvement de translation verticale d véhicule. La position du véhicule est repérée par sa coordonnée 𝑧(𝑡), l’axe 𝑂𝑧 étant vertical, orienté vers le haut.
𝑧(𝑡) représente la coordonnée de l’extrémité supérieure du ressort. A l’équilibre, en l’absence de tout mouvement vertical, la position du véhicule est repérée par sa coordonnée 𝑧e.
1. Faire le bilan des forces
auxquelles le véhicule est
soumis lorsqu’il est hors
équilibre. Les dessiner sur
un schéma.

Révisions écrits ATS - Mécanique 19 / 46
2. Déterminer l’énergie potentielle du véhicule.
3. Déterminer l’expression de la cote ze à l’équilibre en fonction de 𝑚,𝑔, 𝑘 et 𝑙0.
4. Lorsque le véhicule est hors équilibre, déterminer l’équation différentielle vérifiée par 𝑧(𝑡). Cette
équation relie les différentes grandeurs 𝑧e, 𝑚, 𝑘, 𝑧(𝑡) et ses dérivées temporelles.
5. Donner la solution générale de cette équation. Déterminer la pulsation propre 𝜔0 et de la période
propre 𝑇0 de la suspension en fonction de 𝑘 et 𝑚.
6. On suppose qu’un opérateur appuie sur le véhicule et l’amène dans une position repérée par la cote z0
avec 𝑧0 < 𝑧e. A un instant 𝑡 = 0, choisi comme origine du temps, le véhicule est lâché sans vitesse
initiale. Déterminer la solution 𝑧(𝑡) de l’équation différentielle en prenant en compte ces conditions
initiales. Exprimer 𝑧(𝑡) en fonction de 𝑡, 𝑧e, 𝜔0, et 𝑧0.
7. Tracer l’allure de 𝑧(𝑡) et faire apparaitre sur le graphe les cotes minimales 𝑧min, maximale 𝑧max et
moyenne 𝑧moy ainsi que la période propre 𝑇0. Donner les expressions des cotes minimales 𝑧min, maximale
𝑧max et moyenne 𝑧moy en fonction de 𝑧e et 𝑧0.
Deuxième partie : suspension avec amortissement
On suppose dans cette partie que la suspension décrite dans la partie précédente comporte maintenant un
dispositif qui exerce, sur le véhicule de masse 𝑚, une force d’amortissement visqueux modélisée par une
puissance 𝑃 = −ℎ𝑣2 où 𝑣 représente la vitesse du véhicule par rapport à la roue et ℎ un coefficient appelé
coefficient de frottement fluide.
8. Quelle est la dimension puis l’unité de ℎ dans le système international ?
9. Faire le bilan des forces auxquelles le véhicule est soumis lorsqu’il est hors équilibre.
10. Déterminer l’énergie potentielle du véhicule. Quelle est la relation obtenue à l’équilibre ?
11. Lorsque le véhicule est hors équilibre, déterminer l’équation différentielle vérifiée par z(t). Cette
équation relie les différentes grandeurs 𝑧e, 𝑚, 𝑘, ℎ, 𝑧(𝑡) et ses dérivées temporelles.
12. Ecrire les conditions portant sur les paramètres 𝑚, 𝑘 et ℎ pour que la suspension se trouve
respectivement dans les régimes pseudopériodique, critique et apériodique.
13. Véhicule en charge et vieillissement de la suspension
a. Si l’amortissement est tel que la suspension se trouve en régime critique lorsque le véhicule est à
vide, dans quel régime se trouve-t-il lorsque le véhicule est en charge ? Justifier qualitativement la
réponse.

Révisions écrits ATS - Mécanique 20 / 46
b. Dès lors, comment choisir la valeur de l’amortissement pour que le véhicule ne soit pas en régime
pseudopériodique même lorsqu’il est en charge ? Justifier qualitativement la réponse.
Le véhicule se déplace maintenant sur un sol non plat. La position verticale du point bas de la suspension
(roue) est repérée par la variable 𝑧𝑠(𝑡). Il est rappelé que, par hypothèse, la roue est considérée comme
ponctuelle et reste à tout instant en contact avec le sol.
14. Nous nous placerons pour cette question dans le cas particulier où le véhicule se déplace sur une route
telle que :
• Pour 𝑡 < 𝑡1, 𝑧𝑠(𝑡) = 𝑧1 où 𝑧1 est une constante positive et 𝑡1 > 0 ;
• Pour 𝑡 > 𝑡1, 𝑧𝑠(𝑡) = 0.
Pour illustrer la situation, on pourra imaginer qu’à l’instant 𝑡1, le véhicule descend d’un trottoir de hauteur
𝑧1 et rejoint une route plane et horizontale de cote nulle.
On considère que pour 𝑡 < 𝑡1, la cote 𝑧(𝑡) du véhicule est constante, c'est-à-dire que le véhicule se déplace
en régime permanent.
a. Lorsque la suspension est en régime pseudopériodique :
Préciser la valeur de 𝑧 pour 0 < 𝑡 < 𝑡1.
Exprimer la pseudo-pulsation 𝜔𝑃 du véhicule en fonction de ℎ,𝑚 et 𝑘.
Donner l’allure de 𝑧(𝑡) pour 𝑡 variant entre 0 et 𝑡 >> 𝑡1.
Préciser la valeur de 𝑧 pour 𝑡 tendant vers l’infini.
Donner l’expression de 𝑧(𝑡) pour 𝑡 variant entre 0 et 𝑡 >> 𝑡1 en fonction de 𝜔𝑃 , 𝑡, ℎ,𝑚, 𝑧1 et 𝑧e.
b. Lorsque la suspension est en régime apériodique :
Préciser la valeur de 𝑧 pour 0 < 𝑡 < 𝑡1.
Exprimer 𝑟1 et 𝑟2, les racines de l’équation caractéristique en fonction de ℎ,𝑚 et 𝑘.
Donner l’allure de 𝑧(𝑡) pour 𝑡 variant entre 0 et 𝑡 >> 𝑡1.
Préciser la valeur de 𝑧 pour 𝑡 tendant vers l’infini.
Donner l’expression de 𝑧(𝑡) pour 𝑡 variant entre 0 et 𝑡 >> 𝑡1, en fonction de 𝑟1, 𝑟2, 𝑡, 𝑧1 et 𝑧e.
◼ SUJET MK14 : MODELISATION D’UN TRAMPOLINE
Ce problème propose une modélisation un peu simpliste du mouvement d’un trampoliniste (athlète faisant
du trampoline, aussi parfois simplement appelé gymnaste). Un trampoline est constitué d’une toile élastique,
de masse négligeable, elle-même tendue de chaque côté par des ressorts (Source des photos : Eurotramp).

Révisions écrits ATS - Mécanique 21 / 46
La modélisation à 3 dimensions n’étant pas aisée, on adopte ici une modélisation 1D nettement plus simple.
Le trampoline sera modélisé par un seul ressort ne pouvant se déplacer que de façon verticale. La constante
de raideur du ressort sera notée 𝑘 et sa longueur à vide ℓ0. On note 𝑚 la masse de l’athlète, assimilable à un
point matériel, et 𝑧(𝑡) son altitude par rapport au sol où est attaché le ressort (origine au sol, axe dirigé vers
le haut).
L’accélération de la pesanteur est notée 𝑔 et on prendra 𝑔 = 10 𝑚. 𝑠−2.
On néglige tout frottement dans les parties A à D.
Figure 1 – Trampoline avec un ressort dans différentes configurations
A - Étude préliminaire
On choisit le trampoline à vide comme référence pour l’énergie potentielle totale.
1. Donner l’expression de l’énergie potentielle élastique 𝐸𝑝,é𝑙𝑎𝑠(𝑧) lorsque l’athlète est à une altitude 𝑧(𝑡) <
ℓ0, c’est-à-dire lorsque l’athlète est en contact avec le trampoline. Pour la suite, pour une altitude 𝑧(𝑡) > ℓ0
(quand l’athlète n’est en contact avec le trampoline), on considère que l’énergie potentielle élastique est
nulle.
2. Quelle est la dimension d’une énergie ? Justifier par la formule de votre choix.
3. Par analyse dimensionnelle de 𝐸𝑝,é𝑙𝑎𝑠(𝑧), retrouver la dimension de la constante 𝑘 en fonction des
dimensions de bases du système international.
4. Donner l’expression de l’énergie potentielle de pesanteur 𝐸𝑝,𝑝𝑒𝑠(𝑧) lorsque l’athlète est à une altitude
𝑧(𝑡).
5. En déduire l’expression de l’énergie potentielle totale 𝐸𝑝(𝑧) du point matériel en fonction de 𝑧, ℓ0, 𝑘, 𝑚
et 𝑔.
6. Déterminer la longueur 𝑧𝑒𝑞 du ressort à l’équilibre, c’est-à-dire lorsque l’athlète se tient immobile sur le
trampoline (figure 1 (b)), en fonction de 𝑚, 𝑔, 𝑘 et ℓ0.
7. Vérifier l’homogénéité et la cohérence de l’expression de 𝑧𝑒𝑞 trouvée à la question précédente.

Révisions écrits ATS - Mécanique 22 / 46
B - Impulsion initiale et mouvement ultérieur
À 𝑡 = 0, l’athlète fléchit les jambes puis les tend brusquement. Cela a pour effet d’enfoncer le trampoline
d’une hauteur ℎ par rapport à la position d’équilibre (figure 1 (c)). On considère que la vitesse de l’athlète
reste nulle à cet instant où la compression est maximale.
8. Le système est-il conservatif ? Justifier.
9. À l’aide d’une étude énergétique, établir l’équation différentielle (𝐈) du mouvement et la mettre sous la
forme :
�� + 𝜔02 𝑧 = 𝜔0
2 𝑧𝑒𝑞 (𝐈)
où l’on précisera l’expression littérale de la pulsation propre 𝜔0 en fonction des données du problème.
10. Donner les conditions initiales 𝑧(𝑡 = 0) et ��(𝑡 = 0).
11. Résoudre l’équation différentielle (𝐈) obtenue. On exprimera 𝑧(𝑡) en fonction de 𝑧𝑒𝑞, ℎ et 𝜔0.
12. Donner l’expression de la période propre 𝑇0 du mouvement en fonction des données du problème.
13. Tracer l’allure de la courbe 𝑧(𝑡) en représentant 𝑇0, 𝑧𝑒𝑞 et ℎ.
14. Tracer l’allure de la trajectoire de phase et faire apparaître sur le graphique les cotes minimale 𝑧𝑚𝑖𝑛,
maximale 𝑧𝑚𝑎𝑥 et moyenne 𝑧𝑚𝑜𝑦.
Si l’athlète a poussé suffisamment fort, lorsqu’il arrivera à 𝑧(𝑡) = ℓ0, il décollera du trampoline pour décrire
une chute libre jusqu’au moment où il retombera sur le trampoline. On déterminera dans les parties
suivantes l’altitude atteinte par l’athlète. Il nous faut pour cela tout d’abord trouver la vitesse lorsqu’il
décolle, ce qui est le but des prochaines questions.
15. On note 𝑡1 le temps auquel l’athlète atteint la position où il décolle. Donner l’expression de la relation
vérifiée par 𝑡1 ? (attention : il n’est pas demandé pour le moment de la résoudre).
16. Déterminer l’expression de cos(𝜔0𝑡1) en fonction de 𝑚, 𝑔 , 𝑘 et ℎ. Comment voit-on
mathématiquement qu’il est nécessaire que l’athlète ait poussé suffisamment fort pour pouvoir décoller ?
17. En utilisant la solution de l’équation différentielle, déterminer l’expression de ��(𝑡) (l’athlète est toujours
en contact avec le trampoline).
18. Déterminer l’expression de 𝑣0 = ��(𝑡1) la vitesse de l’athlète lorsqu’il quitte le trampoline, en fonction de
ℎ, 𝜔0 et 𝑔. On admettra pour cette question que l’athlète a poussé suffisamment fort. On pourra utiliser la
formule de trigonométrie cos2 𝜃 + sin2 𝜃 = 1 pour simplifier le résultat et le mettre sous la forme suivante :
𝑣0 = ℎ𝜔0√1 − (𝑔
ℎ𝜔02)
2
.
C – Mouvement aérien
L’athlète a maintenant décollé du trampoline et peut donc réaliser des figures.
On s’intéresse à la hauteur maximale qu’il peut atteindre en fonction de 𝑣0. On choisit la nouvelle origine des
temps 𝑡 = 0 au moment où l’athlète décolle avec 𝑧(𝑡 = 0) = ℓ0.
19. À l’aide d’une étude énergétique, établir l’expression de l’accélération 𝑎(𝑡) de l’athlète. Caractériser le
mouvement.
20. Déterminer l’expression des fonctions ��(𝑡) et 𝑧(𝑡) en fonction des données du problème.
21. Comment peut se traduire simplement en équation le fait que l’athlète atteint la hauteur maximale ? 22.
En déduire 𝑡𝑀𝐴𝑋 la durée au bout de laquelle l’athlète atteint la hauteur maximale et 𝑧𝑀𝐴𝑋 sa hauteur
maximale en fonction de 𝑣0, 𝑔 et ℓ0.

Révisions écrits ATS - Mécanique 23 / 46
D – Détermination de la constante de raideur du ressort
On choisit le trampoline à vide comme référence pour l’énergie potentielle totale.
23. Donner l’expression de l’énergie mécanique 𝐸𝑚(𝑧𝑚𝑖𝑛) juste après l’impulsion initiale (voir figure 1 (c) à
compression maximale) en fonction de 𝑧𝑚𝑖𝑛 et des données de l’énoncé.
24. Donner l’expression de l’énergie mécanique 𝐸𝑚′ (𝑧𝑀𝐴𝑋) lorsque l’athlète est au sommet de sa trajectoire
en fonction de 𝑧𝑀𝐴𝑋 et des données de l’énoncé.
25. On suppose que l’énergie mécanique se conserve même si les interactions ont changé. En déduire la
relation entre 𝑧𝑀𝐴𝑋 et 𝑧𝑚𝑖𝑛 (on ne cherchera pas à simplifier l’expression obtenue).
La question 26 est peu guidée et nécessite de l’autonomie pour la résolution
26. La hauteur de saut souhaitée est de 6 𝑚, on estime ℓ0 à 1 𝑚 et la masse du gymnaste à 80 𝑘𝑔. Estimer
la valeur minimale 𝑘 pour que ce dernier ne touche pas le sol lors de son mouvement.
E – Atterrissage
L’athlète redescend et reprend contact avec le trampoline pour ensuite s’arrêter. Pour diminuer le nombre
d’oscillations, il écarte les bras introduisant ainsi un frottement fluide avec l’air dont la puissance est donnée
par 𝑃 = −𝛼𝑣2 où 𝑣 représente la vitesse verticale de l’athlète et 𝛼 un coefficient positif appelé coefficient
de frottement fluide.
On choisit la nouvelle origine des temps 𝑡 = 0 au moment où l’athlète touche le trampoline avec 𝑧(𝑡 = 0) =
ℓ0 et ��(𝑡 = 0) = 𝑣0.
27. À l’aide d’une étude énergétique, montrer que l'équation différentielle (𝐈𝐈) vérifiée par la coordonnée
𝑧(𝑡) au cours du temps s’écrit :
�� + 𝜔0
𝑄�� + 𝜔0
2 𝑧 = 𝜔02 𝑧𝑒𝑞 (𝐈𝐈)
L’oscillateur est donc caractérisé par le couple (𝑄,𝜔0) dont on déterminera l’expression en fonction de
𝑘, 𝛼,𝑚.
28. On pose 𝑍 = 𝑧 − 𝑧𝑒𝑞, déterminer l’équation différentielle vérifiée par 𝑍(𝑡).
On se place dans le cas du régime pseudo-périodique. Les solutions sont de la forme :
𝑍(𝑡) = 𝑒−𝑡 𝜏⁄ (𝐴 𝑐𝑜𝑠 Ω𝑡 + 𝐵 𝑠𝑖𝑛 Ω𝑡)
29. Déterminer la condition sur 𝑄 pour être dans un tel régime.
30. Quelle est la dimension de 𝜏 ? Donner son expression en fonction du facteur de qualité 𝑄 et de la
pulsation propre 𝜔0. Préciser la signification physique de 𝜏.
31. Donner l’expression de la pseudo-pulsation Ω associée à ce mouvement en fonction de 𝑄 et de 𝜔0.
32. En déduire la pseudo-période 𝑇 des oscillations en fonction de 𝑄 et de la période propre 𝑇0.
33. Sachant que 𝑧𝑒𝑞 = ℓ0 −𝑚𝑔
𝑘 et en utilisant les conditions initiales 𝑧(𝑡 = 0) et ��(𝑡 = 0), déterminer les
conditions initiales 𝑍0 = 𝑍(𝑡 = 0) et ��(𝑡 = 0).
34. En déduire les expressions de 𝐴 et 𝐵 en fonction de 𝑍0, 𝑣0, Ω et 𝜏.
35. Déterminer l’expression de 𝑍∞ = limt→∞
𝑍(𝑡). A quelle position correspond 𝑍∞ ?
36. Tracer l’allure de 𝑍(𝑡) en faisant apparaitre les grandeurs suivantes : 𝑇 et 𝑍0.

Révisions écrits ATS - Mécanique 24 / 46
En étudiant le mouvement de l’athlète lors de son atterrissage, on obtient, dans le plan de phase (𝑍, ��), la
trajectoire de phase de la figure 2, donnée en annexe à rendre avec la copie.
37. Positionner sur le graphe, en annexe à rendre avec la copie, 𝑍0 et 𝑍∞.
38. Déterminer, par lecture graphique, la valeur 𝑇 de la pseudo-période.
39. Par analyse graphique, estimer la valeur du facteur de qualité 𝑄. Justifier.
F – Trampoline avec deux ressorts
On cherche un modèle plus proche de la réalité. Pour cela on modifie la modélisation du trampoline à l’aide
de deux ressorts de longueur à vide ℓ0 et de raideur identique 𝑘.
L’athlète, toujours assimilé à un point matériel 𝑀 de masse 𝑚 monte sur le trampoline qui s’enfonce. Le
repérage de l’athlète est alors modifié : sa position est repérée par 𝑥(𝑡) son enfoncement par rapport à la
droite AB supposée fixe, l’axe (𝑂𝑥) est dirigé vers le bas (figure 3).
Figure 3 – Trampoline avec deux ressorts
On choisit la droite AB comme référence pour l’énergie potentielle totale.
40. Donner l’expression de l’énergie potentielle élastique 𝐸𝑝,é𝑙𝑎𝑠(𝑥) lorsque l’athlète est à une position 𝑥(𝑡),
c’est-à-dire lorsque l’athlète est en contact avec le trampoline.
41. Donner l’expression de l’énergie potentielle de pesanteur 𝐸𝑝,𝑝𝑒𝑠(𝑥) lorsque l’athlète est à une position
𝑥(𝑡).
42. En déduire l’expression de l’énergie potentielle totale 𝐸𝑝(𝑥) du point matériel en fonction de 𝑥, 𝑑, ℓ0, 𝑘,
𝑚 et 𝑔.
En prenant les valeurs numériques suivantes : 𝑘 = 4 𝑘𝑁.𝑚−1, ℓ0 = 1 𝑚, 𝑔 = 10 𝑚. 𝑠−2,𝑚 = 80 𝑘𝑔 et 𝑑 =
4 𝑚, on obtient le tracé suivant pour la fonction 𝐸𝑝(𝑥) :

Révisions écrits ATS - Mécanique 25 / 46
43. Déterminer la valeur de la position d’équilibre stable 𝑥𝑒𝑞 2 de l’athlète dans le cas d’un trampoline avec
deux ressorts. Justifier.
44. Sachant que dans le cas d’un seul ressort, on a obtenu 𝑧𝑒𝑞 = ℓ0 −𝑚𝑔
𝑘, déterminer l’expression de de
𝑥𝑒𝑞 1 de l’athlète dans le cas d’un trampoline avec un ressort. Faire l’application numérique de 𝑥𝑒𝑞 1 dans le
cas des valeurs numérique suivantes : : 𝑘 = 4 𝑘𝑁.𝑚−1, ℓ0 = 1 𝑚, 𝑔 = 10 𝑚. 𝑠−2,𝑚 = 80 𝑘𝑔.
Comparer les enfoncements de l’athlète à l’équilibre, 𝑥𝑒𝑞 1 et 𝑥𝑒𝑞 2, dans les deux modélisations du
trampoline.
◼ SUJET MK16 : D’APRES G2E 2018 - LE SAPIN
La sous-partie IV.1 aborde la montée de la sève dans les sapins
des Vosges, qui conduit l’eau et les éléments nutritifs. Le Sapin
commun ou sapin pectiné est le plus haut arbre européen. Il peut
atteindre 60 mètres de haut, tandis que nombre d’arbres
atteignent couramment les 30 mètres Quel mécanisme est donc
capable de faire monter la sève aussi haut ?
Le Sapin commun est présent dans les milieux froids et humides
à des altitudes comprises entre 400 et 1500 m d'altitudes. Le
tronc est droit, les branches horizontales.
Source : http://www.ecobalade.fr/espece/sapin-commun-sapin-pectine-sapin-des-vosges-sapin-blanc
Les sous-parties IV.2 et IV.3 traitent de la vibration d’une branche horizontale selon un modèle mécanique
simplifié d’oscillateur harmonique associé à un frottement fluide. Deux comportements sont étudiés :
- les oscillations libres, telles que celles provoquées par le départ d’un oiseau de la branche où il est perché,
- les oscillations forcées, dues par exemple au vent soufflant en rafales périodiques.
IV.1 Pression à fournir pour faire monter la sève
Q42. Rappeler la valeur de la masse volumique de l’eau.

Révisions écrits ATS - Mécanique 26 / 46
Q43. En assimilant la sève à de l’eau, fluide incompressible supposé statique dans cette question,
déterminer la pression nécessaire pour maintenir la sève au sommet d’un sapin d’une hauteur ℎ de 30
mètres. Comparer le résultat à la pression atmosphérique. Commenter.
IV.2 Oscillation libre d’une branche horizontale
Le bois est un matériau à la fois résistant et souple : on peut le déformer sans le casser, il est élastique. On
modélise une branche rectiligne horizontale, que l’on suppose encastrée dans le tronc d’un arbre, comme
une poutre de section rectangulaire de largeur 𝑏, de hauteur ℎ et de longueur 𝐿. La section de la poutre a
une aire 𝑆 = 𝑏ℎ.
On prendra pour le bois de sapin une masse volumique 𝜌 = 800 𝑘𝑔.𝑚−3.
Au repos la fibre est horizontale, on ne tient pas compte de son poids. Quand on applique une force verticale
transverse 𝐹𝑦 à son extrémité libre, celle-ci est déformée et son extrémité se déplace verticalement dans la
direction verticale de 𝑦𝑓 déplacement que l’on appelle la flèche.
Figure 2 – Modélisation de la branche de sapin
La constante de raideur du ressort équivalent à la branche (du point de vue de son déplacement vertical à
l'extrémité de la branche) est 𝐾 = 2,5. 102 𝑁.𝑚−1 et l’énergie potentielle élastique associée a pour
expression 𝐸𝑝 =1
2𝐾𝑦𝑓
2.
Q44. La vitesse du centre de gravité de la branche est environ égale à 1
2
𝑑𝑦𝑓
𝑑𝑡. En considérant que l’énergie
cinétique de la branche est égale à celle du centre de gravité affectée de toute la masse, justifier que
l’énergie cinétique de la branche de masse 𝑀 s’écrit 1
8𝑀(
𝑑𝑦𝑓
𝑑𝑡)2
.
Q45. Écrire la conservation de l’énergie puis la dériver pour en déduire l’équation du mouvement. Donner
l’expression de la fréquence propre de vibration de la branche en fonction de 𝐾 et 𝑀.
Q46. Modifier l’équation précédente en tenant compte des phénomènes dissipatifs dont on supposera
qu’ils sont modélisés par une force proportionnelle à la vitesse : 𝑓 = −𝜆𝑑𝑦𝑓
𝑑𝑡𝑢𝑦 .
On présentera l’équation sous la forme :
𝑑2𝑦𝑓
𝑑𝑡2+
𝜔0
𝑄 𝑑𝑦𝑓
𝑑𝑡+ 𝜔0
2 𝑦𝑓 = 0
en exprimant 𝜔0 et 𝑄 en fonction de 𝑀, 𝐾 et 𝜆.
On considère que la branche de sapin oscille avec un facteur de qualité 𝑄𝑐 correspondant au régime critique
d’oscillations amorties.
Q47. Qu’est-ce qui distingue le régime critique des deux autres régimes d’amortissement ? Illustrer votre
réponse par des allures de graphiques.
Q48. Retrouver la valeur du facteur de qualité 𝑄𝑐 en régime critique.
Q49. Écrire la solution analytique, en faisant intervenir deux constantes d’intégration. Qu’est-ce qui
détermine ces constantes ?

Révisions écrits ATS - Mécanique 27 / 46
IV.3 Oscillation forcée d’une branche horizontale sous l’effet du vent
On ne tient toujours pas compte du poids de la branche. Les rafales du vent que l’on modélise comme
périodiques et sinusoïdales mettent la branche en oscillation, l’équation prend ainsi la forme
𝑑2𝑦𝑓
𝑑𝑡2+
𝜔0
𝑄 𝑑𝑦𝑓
𝑑𝑡+ 𝜔0
2 𝑦𝑓 = 𝐴 cos(𝜔𝑡)
La valeur du facteur de qualité est toujours celle 𝑄𝑐 du régime critique.
Q50. Donner, en la justifiant, l’unité de la quantité 𝐴.
En régime sinusoïdal forcé, la solution est de la forme 𝑦𝑓(𝑡) = 𝑦𝑓0 𝑐𝑜𝑠 (𝜔𝑡 + 𝜑) . On introduit la grandeur
complexe associée 𝑦𝑓(𝑡 ) = 𝑦𝑓0 𝑒𝑥𝑝(𝑗𝜔𝑡) avec 𝑗2 = −1 .
Q51. Donner l’expression de 𝑦𝑓0 en fonction de 𝐴, 𝜔,𝜔0 et 𝑄.
Q52. Montrer que si 𝑄 >1
√2 , on peut envisager une résonance d’amplitude. Peut-on voir un phénomène
de résonance apparaître pour la branche de sapin ?
◼ SUJET MK17 : CONCOURS COMMUN INP – TPC – 2019 : MODELISATION DU MOUVEMENT D’UNE PLATEFORME
EN MER (OSCILLATIONS LIBRES ET FORCEES)
On s’intéresse au mouvement d’une plateforme en mer. Le modèle envisagé est un système à un degré de
liberté considéré comme oscillateur harmonique : une masse est reliée à un ressort, avec ou sans
amortissement, et peut être soumise à une excitation externe.
Dans la suite de l’énoncé, toutes les grandeurs vectorielles sont indiquées en gras.
On considère le mouvement d’une plateforme en mer soumise à un courant marin. Sa partie supérieure de
masse 𝑚 = 100 𝑡𝑜𝑛𝑛𝑒𝑠 est considérée comme rigide et le mouvement principal de la plateforme a lieu
suivant 𝑥 (figure 1(a)).
Afin d’étudier le mouvement de cette plateforme, on la représente par une masse 𝑚, liée à un ressort de
constante de raideur 𝑘 et à un amortisseur de constante d’amortissement 𝛾, pouvant subir une excitation
externe de force �� 𝒆𝒙𝒄, et se déplaçant sur un support (figure 1(b)). Le ressort représente la rigidité de
l’ensemble du support de la plateforme. L’amortisseur permet de prendre en compte l’effet de l’eau
environnante et la force d’excitation externe celui des vagues qui frappent périodiquement la plateforme. La
masse est supposée se déplacer selon une seule direction parallèle à l’axe 𝑂𝑥 en fonction du temps 𝑡.
Figure 1 – (a) Plateforme en mer soumise aux vagues marines, (b) système masse (𝑚), ressort (𝑘),
amortisseur (𝛾) et excitation externe (�� 𝒆𝒙𝒄)

Révisions écrits ATS - Mécanique 28 / 46
Les projections sur l’axe 𝑂𝑥 de la position, de la vitesse et de l’accélération de la masse en fonction du temps
sont notées respectivement 𝑥(𝑡), ��(𝑡) et ��(𝑡).
La position d’équilibre de la masse sera choisie à 𝑥 = 0. En l’absence d’action de l’amortisseur, la masse se
déplace sur la base horizontale sans frottements.
La force totale 𝑭𝒕𝒐𝒕 agissant sur la masse correspond à la réaction normale𝑹𝑵
de la base horizontale, à la
force de frottement 𝑭𝒅 = −𝛾 �� , à la force de rappel 𝑭𝒌
du ressort, au poids �� de la masse et à la force 𝑭𝒆𝒙𝒄
d’excitation externe.
Aide aux calculs
𝜋
2≃ 1,6 (
𝜋
2)2
≃ 1,62 ≃ 2,5 ln (0,014602
0,010661) ≃
𝜋
10
A - Ressort sans amortissement et sans excitation
1. Donner l’expression de la force de rappel du ressort en fonction des variables du problème.
2. Montrer que l’équation du mouvement de la masse correspond à l’équation différentielle du second
ordre suivante :
�� + 𝜔02 𝑥 = 0.
Donner l’expression de 𝜔0 en fonction des données du problème. Donner le sens physique de 𝜔0.
3. A 𝑡 = 0 : 𝑥(𝑡) = 𝑥0 et la plateforme a une vitesse nulle. Déterminer 𝑥(𝑡) en fonction de 𝜔0, du temps t
et de.𝑥0. Quelle est la période 𝑇0 du mouvement ?
4. Représenter qualitativement 𝑥(𝑡) en fonction de 𝑡 et indiquer sur le tracé 𝑥0 et 2𝜋/𝜔0.
5. Déterminer les expressions des énergies cinétique 𝐸𝑐(𝑡), potentielle 𝐸𝑝(𝑡) et mécanique 𝐸𝑚(𝑡) du
système. Quel commentaire pouvez-vous faire sur l’énergie mécanique ?
6. Montrer, qu'en moyenne sur une période, l'énergie cinétique est égale à l'énergie potentielle.
7. Représenter qualitativement 𝐸𝑐(𝑡), 𝐸𝑝(𝑡) et 𝐸𝑚(𝑡) en fonction de 𝑡.
8. Tracer les courbes des énergies cinétique, potentielle et mécanique en fonction de 𝑥. Tracer la
trajectoire de phase de cet oscillateur en faisant correspondre les valeurs de 𝑥 pour les 2 courbes.
Justifier ce tracé et faire apparaitre 𝑥0 sur le graphe.
B - Ressort avec amortissement et sans excitation
9. La force de frottement que l’amortisseur exerce sur la masse est considérée comme linéaire, c’est-à-
dire proportionnelle au vecteur vitesse �� de celle-ci : 𝑭𝒅 = −𝛾 �� , avec 𝛾 une constante d’amortissement
positive. Montrer que la position de la masse en fonction du temps suit l’équation du mouvement ci-
après :
�� + 2𝜉𝜔0�� + 𝜔02𝑥 = 0.
avec 𝜔0 défini en question 2. et 𝜉 à exprimer en fonction de 𝛾, 𝑘 et 𝑚.
On se place dans le cas du régime pseudo-périodique. Les solutions sont de la forme :
𝑥(𝑡) = 𝑒−𝜉𝜔0𝑡(𝐴 𝑐𝑜𝑠 Ω𝑡 + 𝐵 𝑠𝑖𝑛 Ω𝑡)
10. Déterminer la condition sur 𝜉 pour être dans un tel régime.
11. Donner l’expression de la pseudo-pulsation Ω associée à ce mouvement en fonction de 𝜉 et de la
pulsation propre 𝜔0.
12. En déduire la pseudo-période 𝑇 des oscillations en fonction de 𝜉 et de la période propre 𝑇0.

Révisions écrits ATS - Mécanique 29 / 46
13. Déterminer les expressions de 𝐴 et 𝐵 en fonction de 𝜉 et 𝑥0.
On suppose pour les questions suivantes que la condition suivante : 𝜉 ≪ 1 est vérifiée.
14. Cela signifie-t-il que les frottements sont très importants ou très faibles ? Justifier.
15. Montrer que l’on a alors Ω ≈ 𝜔0.
16. Montrer que dans le cas où 𝜉 ≪ 1, l’expression de 𝑥(𝑡) peut se simplifier sous la forme :
𝑥(𝑡) = 𝑥0𝑒−𝜉𝜔0𝑡 cos(𝜔0𝑡)
17. Tracer l’allure de 𝑥(𝑡) en faisant apparaitre les grandeurs suivantes : 𝑇 et 𝑥0.
18. La condition 𝜉 ≪ 1 étant toujours vérifiée, en déduire l’expression simplifiée de l’énergie cinétique
𝐸𝑐(𝑡) de 𝑀 en fonction du temps.
19. Montrer alors que l’énergie mécanique moyenne sur une pseudo-période peut se mettre sous la forme
approchée :
𝐸𝑚 =1
2𝑘𝑥0
2𝑒− 𝑡𝜏
On donnera l’expression de 𝜏 en fonction de 𝜉 et 𝜔0.
20. On envisage deux temps successifs 𝑡1 et 𝑡2 pour lesquels les déplacements sont 𝑥1 et 𝑥2, tels que 𝑡2 >
𝑡1 et 𝑡2 − 𝑡1 = 𝑇 ≈ 𝑇0, avec 𝑇: pseudo-période des oscillations amorties. En utilisant l’expression
simplifiée de 𝑥(𝑡) (Q16), montrer que :
ln (𝑥1
𝑥2) = 2𝜋𝜉.
21. Le relevé du déplacement horizontal de la plateforme en fonction du temps est représenté en figure 2.
En utilisant les deux points qui sont indiqués sur la figure, déterminer 𝑇, 𝜔0, 𝑘, 𝜉, 𝜏 et 𝛾.
Figure 2 – Relevé du déplacement horizontal 𝑥 (en 𝑚) de la plateforme de masse 𝑚 = 100 𝑡𝑜𝑛𝑛𝑒𝑠 en
fonction du temps 𝑡 (en 𝑠). Les deux temps 𝑡1 et 𝑡2 mentionnés en question Q20 sont indiqués
22. Représenter qualitativement 𝐸𝑐(𝑡), 𝐸𝑝(𝑡) et 𝐸𝑚(𝑡) en fonction de 𝑡.
C - Ressort avec amortissement et avec excitation
On envisage enfin le cas où le système est soumis à la fois aux effets d’amortissement et d’excitation. On se
limite ici à la réponse à une excitation harmonique sinusoïdale de fréquence 𝜔 produite par une force
extérieure au système
𝑭𝒆𝒙𝒄 (𝑡) = 𝐹0 cos(𝜔𝑡)𝒖𝒙

Révisions écrits ATS - Mécanique 30 / 46
avec 𝒖𝒙 vecteur unitaire sur l’axe 𝑂𝑥 et on se place dans le cas traité précédemment pour l’étude de
l’amortisseur, c’est-à-dire 𝜉 < 1.
23. Montrer, que l’équation différentielle caractérisant le système devient alors :
�� + 2𝜉𝜔0�� + 𝜔02𝑥 =
𝐹0
𝑚cos(𝜔𝑡)
avec 𝜔0 et 𝜉 à exprimer en fonction de 𝛾, 𝑘 et 𝑚.
24. On admet dans ce qui suit que la réponse du système dans le cas où amortisseur et excitation sont pris
en compte peut s’écrire : 𝑥(𝑡) = 𝑋 cos(𝜔𝑡 − 𝜙)
En privilégiant une représentation complexe, vérifier que :
𝑋 =𝐹0
𝑚.
1
√(𝜔02 − 𝜔2)2 + (2𝜉𝜔0𝜔)2
25. Exprimer la grandeur 𝑀 =𝑋
𝐹0 𝑘⁄ en fonction de 𝑟 =
𝜔
𝜔0 et expliciter le sens physique de 𝑀.
26. Trouver la condition sur 𝑟 puis sur 𝜔 pour laquelle 𝑀 est maximale.
27. Si l’on considère une période moyenne des vagues en mer de 8 𝑠 et que l’on a 𝜔0 =𝜋
2 𝑟𝑎𝑑. 𝑠−1 et
𝜉 = 5. 10−2 que peut-on conclure sur le mouvement de la plateforme ?
◼ SUJET MK18 : VIBRATIONS DU VERRE (CONCOURS CENTRALE-SUPELEC - TSI – 2018)
Dans le vingt-et-unième album de la série Les Aventures de Tintin, intitulé Les Bijoux de la Castafiore, cette
dernière est en mesure de faire exploser un verre par la simple utilisation de sa voix. Le présent sujet se
penche sur les aspects physiques de ce phénomène. Nous tenterons ainsi de déterminer les circonstances
dans lesquelles il est effectivement possible de réaliser une telle prouesse et nous nous pencherons sur les
rôles joués par les différents paramètres physiques susceptibles d’influer sur ces circonstances.
Conseils généraux et remarques
• Afin d’en faciliter la lecture et l’analyse, certaines courbes et images expérimentales ont été simplifiées.
• Les applications numériques seront faites avec un nombre adapté de chiffres significatifs.
• Les différentes parties du problème sont largement indépendantes, mais les données numériques fournies ou calculées dans les différentes parties sont susceptibles d’être utilisées dans toutes les parties.
I- Analyse expérimentale des vibrations du verre
Il est extrêmement facile, en frappant un verre à pied, d’entendre le son que celui-ci émet. On se propose
dans cette partie de déterminer, à partir d’une modélisation simple, quelques propriétés des oscillations
libres d’un verre mis ainsi en vibration.
Figure 1
Un verre à pied, d’un diamètre de 12 cm, est frappé, à l’instant 𝑡 = 0 , au niveau du bord supérieur à l’aide
d’un petit marteau. Le son émis est enregistré par ordinateur. Son analyse spectrale peut alors être réalisée

Révisions écrits ATS - Mécanique 31 / 46
à tout moment de l’enregistrement. Le microphone utilisé pour l’enregistrement présente une courbe de
réponse en fonction de la fréquence donnée sur la figure 2.
Figure 2 Réponse relative du microphone en fonction de la fréquence
La figure 3 représente le chronogramme de cet enregistrement et la figure 4 une analyse spectrale réalisée
peu après le début de l’enregistrement. La figure 5 présente son analyse spectrale aux dates
𝑡 = 1,0 ; 2,0 ; 3,0 et 4,0 𝑠.
Figure 3 Chronogramme de l’enregistrement sonore du verre
Figure 4 Analyse spectrale du son réalisée peu après la frappe du verre

Révisions écrits ATS - Mécanique 32 / 46
Figure 5 Analyse spectrale du son à différents instants après la frappe du verre
I-A Analyse qualitative de l’enregistrement
Les « pics » représentés dans les analyses spectrales correspondent à des modes propres de vibration du
verre.
1. Comment peut-on nommer la plus basse fréquence ? Comment peut-on nommer les autres fréquences
?
2. Quelle est la fréquence du signal enregistré ?
3. Donner les valeurs des différentes fréquences. Elles sont liées par une relation simple ; laquelle ?
4. Quelle caractéristique de la courbe de réponse du microphone est essentielle pour réaliser un
enregistrement et une analyse spectrale représentant correctement le phénomène étudié ?
5. Quelle(s) autre(s) information(s) peut-on déduire des différentes analyses spectrales ?
I.B – Estimation du facteur de qualité 𝑸
Quand le verre est en vibration, son bord supérieur oscille autour de sa position au repos. Afin d’estimer le
facteur de qualité du verre, on le modélise par une masse 𝑚 mobile sur l’axe (𝑂𝑥) horizontal associée à un
ressort de raideur 𝑘, de longueur à vide nulle (figure 6). Les frottements seront, quant à eux, modélisés par
un frottement fluide de type 𝑓 = −𝛼𝑣 où 𝑣 désigne le vecteur vitesse de la masse 𝑚.
Figure 6 Modèle mécanique du déplacement
6. Montrer que l’équation différentielle traduisant l’évolution temporelle de 𝑥(𝑡) s’écrit de la façon
suivante, avec 𝜔0 et 𝑄 deux constantes que l’on exprimera en fonction de α, 𝑘 et 𝑚.
𝑑2𝑥
𝑑𝑡2+
𝜔0
𝑄 𝑑𝑥
𝑑𝑡+ 𝜔0
2 𝑥 = 0
7. Quelle est la signification physique de 𝜔0 et de 𝑄 ? Quelles sont les unités de ces deux grandeurs ?

Révisions écrits ATS - Mécanique 33 / 46
8. Compte tenu du choc initial avec le marteau, déterminer, dans le cas d’un frottement « faible »,
l’expression approchée de la solution 𝑥(𝑡) avec les conditions initiales 𝑥(𝑡 = 0) = 0 et 𝑑𝑥
𝑑𝑡(𝑡 = 0) = 𝑉0. Représenter son allure.
9. En quoi, l’enregistrement de la figure 3 est-il en accord à la modélisation par un frottement fluide ?
10. Proposer, à partir de l’évolution temporelle de l’amplitude de la fréquence la plus basse de la figure 5,
un ordre de grandeur du facteur de qualité. Donnée : 1
ln2≈ 1,5
Dans la suite de l’expérience, on va chercher à mettre en résonance le verre à l’aide d’une excitation
sinusoïdale.
11. Donner une estimation du temps nécessaire pour mettre le système en régime sinusoïdal forcé.
II Étude de la résonance en amplitude du verre en régime sinusoïdal forcé
On souhaite étudier plus finement la réponse en amplitude du verre au voisinage de la fréquence de
résonance du mode 1 précédemment déterminée.
Un hautparleur relié à un générateur basse fréquence produit une onde sonore sinusoïdale de fréquence 𝑓.
Le verre, placé à proximité du haut-parleur (figure 7), est ainsi placé en régime sinusoïdal forcé.
Figure 7
II.A – Approche théorique
L’équation différentielle traduisant l’évolution temporelle de 𝑥(𝑡) est alors de la forme suivante, avec
𝜔 = 2𝜋𝑓 la pulsation du signal acoustique délivré par le générateur basse fréquence :
𝑑2𝑥
𝑑𝑡2+
𝜔0
𝑄 𝑑𝑥
𝑑𝑡+ 𝜔0
2𝑥 = 𝐴0 cos(𝜔𝑡)
En régime sinusoïdal forcé, la solution est de la forme (𝑡) = 𝑋 𝑐𝑜𝑠 (𝜔𝑡 + 𝜑) . On introduit la grandeur
complexe associée 𝑥(𝑡 ) = 𝑋 𝑒𝑥𝑝(𝑗𝜔𝑡) avec 𝑗2 = −1 .
12. Comment nomme-t-on la grandeur 𝑋 ? Que représente son module, son argument ?
13. Établir l’expression du module de 𝑋 en fonction de 𝜔, 𝜔0, 𝐴0 et 𝑄.
14. À partir d’une étude qualitative, justifier le numéro de graphe de la figure 8 compatible avec le tracé du
module de 𝑋 en fonction de la pulsation 𝜔.

Révisions écrits ATS - Mécanique 34 / 46
Figure 8 Module de 𝑋 en fonction de 𝜔
15. Montrer que si 𝑄 > 𝑄0 avec 𝑄0 =1
√2, on peut envisager une résonance d’amplitude.
16. Dans le cas d’une résonance d’amplitude, exprimer la pulsation correspondante, notée 𝜔𝑟 en fonction
de 𝜔0 et 𝑄.
Dans la suite, on suppose Q ≫ 𝑄0 .
17. Quelle est alors l’expression de la pulsation de résonance 𝜔𝑟 ?
18. On note 𝑋𝑟 le module de 𝑋 pour 𝜔 = 𝜔𝑟. Établir son expression en fonction de 𝜔0, 𝐴0 et 𝑄 .
19. Définir les pulsations de coupure 𝜔1 et 𝜔2 (𝜔1 < 𝜔2) du module de 𝑋. Montrer que la relation liant 𝜔0,
𝑄 et Δ𝜔 = 𝜔2 − 𝜔1 est :
𝑄 =𝜔0
Δ𝜔.
II.B – Tracé expérimental
Une série de mesure de l’amplitude 𝑋 au voisinage de la résonance permet de tracer le graphe représenté
sur la figure 9.
20. Déterminer, à partir de la figure 9, la fréquence de résonance 𝑓𝑟 et le facteur de qualité 𝑄 du verre dans
son mode 1. Comparer ces résultats à ceux du II.A. Donnée : 1
√2≈ 0,7
Figure 9 Amplitude relative en fonction de la fréquence
21. Un générateur basse fréquence disponible au laboratoire présente les caractéristiques données dans le
tableau ci-dessous. Est-il réaliste de pouvoir mettre en résonance le verre en utilisant celui-ci ?

Révisions écrits ATS - Mécanique 35 / 46
◼ SUJET MK19 : ATS 2011 : GENERATEUR D’ENERGIE PORTABLE OSCILLATIONS FORCEES
On trouve de plus en plus de dispositifs permettant la génération d’énergie électrique à partir de mouvement humain volontaire ou non volontaire. Le sujet propose de modéliser un générateur d’énergie électrique fonctionnant à partir du mouvement naturel du corps humain. Il permet par exemple de recharger les accumulateurs d’un téléphone portable ou d’un baladeur.
I. Modélisation de la marche d'un joggeur
Lorsqu’on enregistre grâce à des marqueurs le déplacement en 3 dimensions du torse humain, on remarque
que le déplacement le plus significatif est le mouvement vertical de la hanche.
En vue de la modélisation, on assimile le mouvement vertical de la hanche à un déplacement purement
sinusoïdal : 𝑍𝑒(𝑡) = 𝑍𝑒cos(𝜔𝑡) + 𝑍𝑚𝑜𝑦 (on fera abstraction de la position de l'origine des temps)
1. Déterminer graphiquement, avec une précision de 10 %, la valeur moyenne 𝑍𝑚𝑜𝑦 et l'amplitude 𝑍𝑒 du
mouvement.
2. Déterminer graphiquement, avec une précision de 10 %, la période 𝑇 du mouvement. En déduire la
pulsation 𝜔.
II. Modélisation mécanique du générateur d'énergie portable
Lorsque l’homme marche, il entraîne un système de récupération d’énergie disposé sur sa hanche. Le
référentiel mobile ℛ′ (𝑂, 𝑢𝑥 , 𝑢𝑦 , 𝑢𝑧 ) est en translation dans le référentiel terrestre ℛ supposé galiléen. Le
référentiel mobile ℛ′ est repéré en coordonnées cartésiennes dans ℛ par sa position verticale :
Figure 3 : Relevé en laboratoire de l'altitude 𝑍𝑒(𝑡) (en mm) lors de la marche d'un homme à
5 km/h sur un tapis roulant en fonction du temps (en s).

Révisions écrits ATS - Mécanique 36 / 46
𝑍𝑒(𝑡) = 𝑍𝑒cos(𝜔𝑡) + 𝑍𝑚𝑜𝑦; sa vitesse selon 𝑢𝑥 est uniforme.
3. Le référentiel mobile ℛ ′ est-il galiléen ? Déterminer l’accélération d’entraînement ae de ℛ ' par rapport
à ℛ et montrer qu’elle se met sous la forme :
𝑎𝑒 = −𝜔2𝑍𝑒cos(𝜔𝑡)𝑢𝑧
Le générateur est constitué d’un empilement cylindrique d’aimants au milieu duquel oscille une bobine
lorsque l’homme marche. Le mobile {bobine + masse} de masse totale 𝑚 = 50 g est en suspension sur un
ressort que l’on supposera parfait, de raideur 𝑘 et de longueur à vide 𝑙0.
Dans le référentiel mobile ℛ′, on note 𝑧(𝑡) la position du mobile par rapport à O le point d’attache et 𝑣(𝑡) =𝑑𝑧
𝑑𝑡 sa vitesse.
L’accélération du champ de pesanteur est notée 𝑔 = −𝑔𝑢𝑧 .
Afin de prendre en compte la conversion d’énergie mécanique-électrique, on modélisera l’interaction
électromagnétique agissant sur le mobile {bobine + masse} par une force de la forme 𝐹 = −𝛼𝑣 .
4. Exprimer les forces s’exerçant sur le mobile { bobine + masse } dans le référentiel mobile ℛ′
(O, ux , uy , uz ).
5. On note zeq la position d’équilibre du mobile { bobine + masse } lorsque ℛ′ est fixe dans ℛ. Exprimer 𝑧eq
en fonction de 𝑚,𝑔, 𝑘 et 𝑙0.
6. A l’équilibre, le ressort est-il comprimé ou étiré ? Justifier.
On considère dans toute la suite du problème que l’homme marche, c’est à dire que ℛ′ est en translation
dans ℛ.
On admet que le mouvement d’entrainement est associé à une force d’inertie d’entraînement 𝐹𝑖𝑒 = −𝑚𝑎𝑒 .
Cette force d’inertie devra être prise en compte dans tout bilan de forces pour le système étudié, et ainsi, on
pourra utiliser la seconde loi de Newton dans le référentiel ℛ′.

Révisions écrits ATS - Mécanique 37 / 46
On note 𝑍(𝑡) = 𝑧(𝑡) − 𝑧eq la position du mobile { bobine + masse } par rapport à sa position d’équilibre 𝑧eq
.
7. Montrer que l’équation différentielle du mouvement du mobile dans le référentiel ℛ ′ se met sous la
forme :
Z +ω0
QZ + ω0
2Z = ω2Zecos(ωt)
On exprimera 𝜔0et 𝑄 en fonction de 𝑚, 𝑘 et 𝛼.
On étudie dans la suite le régime sinusoïdal forcé imposé par la marche de l’homme à la fréquence 𝑓 =𝜔
2𝜋.
Utilisons les grandeurs complexes 𝑍 et 𝑣 associées à 𝑍(𝑡) et 𝑣(𝑡) :
𝑍(𝑡) = 𝑍𝑚. 𝑒𝑗𝜔𝑡 𝑣(𝑡) = 𝑉𝑚. 𝑒𝑗𝜔𝑡 avec 𝑗2 = −1
avec 𝑍𝑚 𝑒𝑡 𝑉𝑚 amplitudes complexes de 𝑍(𝑡) et 𝑣(𝑡)
8. Exprimer 𝑉𝑚 en fonction de 𝑍𝑚 et ω.
9. A partir de l’équation différentielle du mouvement, déterminer l’expression de l’amplitude complexe de
la vitesse 𝑉𝑚.
10. En déduire que le module de 𝑉𝑚 se met sous la forme :
𝑉𝑚 = ∣∣𝑉𝑚 ∣
∣ =𝜔2𝑍𝑒
𝜔0
1
√1𝑄2 + (
𝜔𝜔0
−𝜔0𝜔
)2
On fait l’hypothèse que l’oscillateur est suffisamment amorti pour pouvoir considérer que la pulsation de
résonance en vitesse est ω0.
11. Exprimer l’amplitude de la vitesse 𝑉𝑚 à la résonance en fonction de 𝑚,𝑍e, 𝜔0 et 𝛼.
12. En déduire l’amplitude des oscillations 𝑍𝑚 = ∣∣𝑍𝑚 ∣
∣ à la résonance.
Compte tenu des dimensions du dispositif, l’amplitude des oscillations est limitée à 𝐿max = 4 cm.
13. Montrer que le coefficient de conversion α doit être supérieur à 𝛼min pour que l’amplitude maximale des
oscillations soit inférieure à 𝐿max. On précisera l’expression de 𝛼min en fonction de 𝑚,𝑍e, ω0 et 𝐿max .
14. On supposera par la suite que le dispositif est conçu pour fonctionner à la résonance avec une amplitude
maximale des oscillations égale à 𝐿max et avec 𝛼 = 𝛼min .
15. Quelle est l’expression de la puissance 𝒫 de la force 𝐹 modélisant la conversion d’énergie mécanique-
électrique ? Pourquoi le système doit-il être conçu pour fonctionner à la résonance ?
16. Exprimer la puissance moyenne ⟨𝒫⟩ de la force 𝐹 en fonction de 𝑚, 𝐿max, 𝑍e et 𝜔0.
17. Calculer la raideur du ressort nécessaire pour fonctionner à la résonance et la puissance moyenne ⟨𝒫⟩.
On prendra 𝜔 = 𝜔0 = 10 rad/s et 𝑍e = 2 cm.
◼ SUJET MK 21 : D’APRES E3A MP 2016 - AFM EN MODE OSCILLANT .
La microscopie en champ proche tire profit de phénomènes physiques qui ont un effet notable sur des
gammes de distances inférieures au micromètre. Il est ici proposé l’étude d’un instrument permettant
d’imager des surfaces avec une résolution inférieure à 10 nm : le microscope à force atomique (AFM pour
Atomic Force Microscope).

Révisions écrits ATS - Mécanique 38 / 46
La sonde de mesure d’un AFM est principalement constituée d’un levier de dimensions micrométriques au
bout duquel est fixé une pointe de forme conique. Cette pointe entre en interaction via les forces de Van der
Waals avec les surfaces que l’on cherche à imager. La distance pointe-surface est de l’ordre de quelques
nanomètres. Le mode oscillant permet, sans contact avec l’échantillon donc sans risque de l’endommager,
de mesurer le gradient de la force d’interaction entre la pointe et l’échantillon.
A - Dimensions de la pointe AFM
Les photographies de la figure 1 représentent la pointe d’un microscope à force atomique. Elles ont été
obtenues avec un microscope électronique à balayage (MEB). Au lieu d’être éclairés par de la lumière visible,
comme c’est le cas dans un microscope optique traditionnel, les objets sont « éclairés » par des électrons
préalablement accélérés.
Figure 1 – Images MEB d’une pointe AFM.
1 - Évaluer la largeur et la hauteur de la pointe AFM ainsi que la largeur et l’épaisseur du levier. Confronter
aux données de l’énoncé.
2 - Quelle est selon vous l’information qui figure dans l’encart blanc en bas à gauche des images sous la forme
« × ... » ? Comparer aux microscopes optiques traditionnels.
3 - Expliquer qualitativement pourquoi on ne peut pas obtenir cette image avec un microscope optique
traditionnel.
B - Système pointe-levier
La pointe du microscope se situe sous un levier parallélépipédique de longueur 𝐿, de largeur 𝑎 et d’épaisseur
𝑒 encastré horizontalement dans une paroi. Au repos, le système levier-pointe, de masse 𝑚, est horizontal,
à la distance 𝑑0 de l’échantillon. On néglige son poids. Quand on applique une force verticale 𝐹𝑒𝑥𝑡 (on
supposera que la force reste verticale tout au long de l’expérience) à l’extrémité libre du système, celui-ci est
déformé. L’extrémité est déplacée verticalement d’une distance 𝑧 que l’on appelle la flèche (voir figure 2) et
se trouve alors à une distance 𝑑(𝑧) de l’échantillon.
Figure 2 – Système encastré dans une paroi et modèle.
La flèche 𝑧 est donnée par la relation

Révisions écrits ATS - Mécanique 39 / 46
𝑧 =4𝐿3
𝐸𝑎𝑒3𝐹𝑒𝑥𝑡
où 𝐸 = 1,0 ·1011 USI est appelé module d’Young du matériau constituant le levier et la pointe et
𝐹𝑒𝑥𝑡 = 𝐹𝑒𝑥𝑡𝑒𝑧
4 - Quelle est la dimension du module d’Young 𝐸 ?
5 - En se plaçant à l’équilibre, montrer que l’on peut modéliser la force rappelant la pointe du microscope
vers sa position d’équilibre par un ressort de longueur à vide nulle et de constante de raideur 𝑘 dont on
donnera l’expression en fonction de 𝐸, 𝑎, 𝐿 et 𝑒.
6 - Déterminer numériquement 𝑘 pour une fibre de longueur 𝐿 = 2,0 . 102 μm, de largeur 𝑎 = 50 μm et
d’épaisseur 𝑒 = 5,0 μm.
Dans un premier temps, on ne considère pas les forces d’interactions entre la pointe et l’échantillon. Le levier
et la pointe sont seuls. Le déplacement d’une céramique piézoélectrique soumet le système pointe-levier à
une force excitatrice 𝐹𝑒𝑥𝑡 = 𝐹𝑚 cos(𝜔𝑡) 𝑒𝑧 . De plus, le système est soumis à une force de frottement fluide
de coefficient 𝛼 et à la force de rappel du ressort. On note 𝑧 l’écart à la position d’équilibre. L’équation de la
dynamique du mouvement du système pointe-levier s’écrit
�� +𝛼
𝑚�� +
𝑘
𝑚𝑧 =
𝐹𝑚𝑚
cos(𝜔𝑡)
On pose 𝐴 =𝐹𝑚
𝑚.
7 - Exprimer la pulsation propre 𝜔0 et le facteur de qualité 𝑄 associés à cet oscillateur.
On note 𝑧(𝑡) = 𝑍0 𝑒𝑗𝜔𝑡 la solution particulière de l’équation de la dynamique.
8 - En déduire l’expression de l’amplitude complexe d’oscillation 𝑍0 en fonction de la pulsation 𝜔.
9 - Exprimer sa norme.
10 - Établir l’expression de la pulsation de résonance 𝜔𝑟 en fonction de la pulsation propre 𝜔0 et du facteur
de qualité 𝑄. À quelle condition sur le facteur de qualité la résonance existe-t-elle ?
On pourra poser |𝑍0 | = 𝐴/(𝜔02√𝑓(𝑋)) où 𝑓 est une fonction de la variable 𝑋 = (𝜔/𝜔0)
2
11 - Sur la figure 3 est représentée l’amplitude |𝑍0 |des oscillations dans le cas où il y a résonance. Reproduire
cette courbe sur votre copie, et y superposer l’allure de l’amplitude |𝑍0 | des oscillations dans le cas où il n’y
a pas résonance. Faire apparaître la valeur atteinte par |𝑍0 | en basse fréquence.
C - Protocole AFM
Prenons à présent en considération, en plus de la force excitatrice, la force d’interaction entre la pointe et la
surface, que l’on écrit formellement 𝐹𝑖𝑛𝑡 = 𝐹𝑖𝑛𝑡𝑒𝑧 . On suppose pouvoir utiliser un développement limité au
premier ordre au voisinage de la position d’équilibre 𝑧 = 0 ∶
𝐹𝑖𝑛𝑡(𝑧) ≈ 𝐹𝑖𝑛𝑡(0) + 𝛽𝑧 avec 𝛽 =𝑑𝐹𝑖𝑛𝑡
𝑑𝑧(𝑧 = 0).

Révisions écrits ATS - Mécanique 40 / 46
12 - Écrire la nouvelle équation de la dynamique en présence de cette interaction.
13 - Montrer que la nouvelle pulsation propre s’écrit Ω0 = 𝜔0√1 −𝛽
𝑘.
La force d’interaction peut s’écrire sous la forme
𝐹𝑖𝑛𝑡(𝑧) =𝐻𝑅
6𝑑(𝑧)2
où 𝑅 est le rayon de courbure de la pointe et 𝐻 = 1,5 · 10−20 USI est la constante de Hammacker.
14 - À l’aide de la figure 2, déterminer une relation entre 𝑧, 𝑑(𝑧) et 𝑑0, puis exprimer 𝛽.
15 - L’écart relatif à la pulsation de résonance que génère l’existence d’une interaction se produit-il vers les
hautes ou basses fréquences ?
16 - Sur la même figure qu’à la question 11, représenter qualitativement le cas résonant prenant désormais
en compte l’interaction décrite précédemment.
◼ SUJET MK22 : BANQUE PT 1999 : CORDE DE MELDE ONDES
Dans ce problème, on étudie quelques aspects d'un émetteur sonore à savoir un instrument de musique à
cordes, à partir du modèle de la corde vibrante.
On considère une corde homogène initialement au
repos et confondue avec l'axe 𝑂𝑥, inélastique, de
masse linéique µ, tendue par une tension
pratiquement uniforme et constante 𝑇. Le dispositif
global est représenté figure 1. La corde est tendue par
une masse par l'intermédiaire d'une poulie. La corde
est fixée au point O et un guidage impose 𝑦 = 0 à
chaque instant à l'abscisse 𝑥 = 𝐿.
On étudie les petits mouvements transversaux de la
corde dans le plan 𝑥𝑂𝑦, autour de la position d'équilibre.
L'élongation à l'instant t du point M d'abscisse 𝑥 est notée 𝑦(𝑥, 𝑡).

Révisions écrits ATS - Mécanique 41 / 46
La tangente en M à la corde fait avec
l'axe 𝑂𝑥 un angle 𝜃(𝑥, 𝑡). Les
déplacements étant de faibles
amplitudes, cet angle reste petit
(cf. figure 2).
Dans l'étude du mouvement de la
corde, on négligera l'action du
champ de pesanteur ainsi que toute
cause d'amortissement.
La géométrie du problème est
représentée figure 2 ; on y a représenté les tensions appliquées à l'élément de corde MN.
Equation d'onde d'élongation de la corde
1. Faire le bilan des forces extérieures appliquées à l'élément de corde MN d'abscisse comprise entre 𝑥 et
𝑥 + ∆𝑥.
2. Déterminer la masse de l'élément de corde MN au premier ordre en x et son accélération en fonction
d'une dérivée partielle seconde.
3. Appliquer le principe fondamental de la dynamique à cet élément de corde et en déduire :
- que la tension 𝑇 est uniforme, par projection sur 𝑂𝑥.
- que l'équation obtenue par projection sur l'axe 𝑂𝑦 (on rappelle que 𝜃 est petit) est de la forme
𝑑𝑚 𝜕2𝑦
𝜕𝑡2= 𝑇
𝜕𝜃
𝜕𝑥 𝑑𝑥
4. Exprimer tan 𝜃 en fonction d'une dérivée partielle à déterminer. En déduire 𝜕𝜃
𝜕𝑥.
5. En déduire l'équation 𝜕2𝑦
𝜕𝑥2 −1
𝑣2 𝜕2𝑦
𝜕𝑡2 = 0 Eq. (1)
6. Exprimer la constante 𝑣 en fonction de 𝑇 et µ et en donner la dimension. Que représente-t-elle ?
7. Application numérique : Calculer µ et 𝑣 pour une corde d'acier de masse volumique 7,2.103 kg.m-3, de
rayon 1 mm et soumise à une tension 𝑇 = 3000 N.
Recherche des solutions
On rappelle que la corde est fixée de façon rigide en 𝑥 = 0 et guidée en 𝑥 = 𝐿. On cherche les solutions de
l'équation de propagation sous la forme :
𝑦(𝑥, 𝑡) = 𝑓 (𝑥). 𝑔(𝑡) Eq. (2) (ondes stationnaires)
et on admet que les fonctions 𝑓(𝑥) et 𝑔(𝑡) sont sinusoïdales et on pose :
𝑓 (𝑥) = 𝑎1 𝑠𝑖𝑛(𝑘𝑥 + 𝜑1 )
𝑔(𝑡) = 𝑎2 𝑠𝑖𝑛(𝜔𝑡 + 𝜑2)
8. Quelle type d’onde 𝑦(𝑥, 𝑡) modélise-t-elle ? En introduisant l'équation (2) dans l'équation (1), déduire
la relation qui lie k à .
9. Que peut-on dire de l'élongation aux points 𝑥 = 0 et 𝑥 = 𝐿 à chaque instant ? En déduire les valeurs
𝑓(0) et 𝑓(𝐿).

Révisions écrits ATS - Mécanique 42 / 46
10. Montrer que 𝜆 =2 𝜋
𝑘 ne peut prendre qu'une série de valeurs discrètes n que l'on exprimera en fonction
de 𝐿 et 𝑛. Comment appelle-t-on 𝜆 ?
11. En déduire que 𝜔 ne peut prendre qu'une série de valeurs discrètes 𝜔n, avec 𝑛 entier positif. Exprimer
𝜔n en fonction de 𝐿, 𝑛 et 𝑣.
12. A chaque valeur de 𝜔n correspond un mode propre. Le mode 𝑛 = 1 est appelé mode fondamental.
Les modes correspondant à 𝑛 supérieur à 1 sont les harmoniques.
13. Exprimer l'élongation 𝑦𝑛 (𝑥, 𝑡) du mode d'indice 𝑛 et donner une représentation graphique de la corde
en mouvement (à un instant donné) pour les trois premiers harmoniques.
14. Calculs sur les cordes d'une guitare électrique.
Une guitare électrique comporte six cordes en acier.
Le tableau ci-dessous fournit pour chaque corde, la valeur de sa fréquence fondamentale et son diamètre.
Toutes les cordes ont une longueur 𝐿 = 0,63 m et une masse volumique 𝜌 = 7800 kg.m-3.
Déterminer 𝑇, la tension de la corde, en fonction de 𝜌, 𝜋, 𝑑, 𝐿 et 𝑓1 =𝜔1
2 𝜋 pour le mode fondamental. Calculer
numériquement les tensions nécessaires pour que la guitare soit accordée.
◼ SUJET MK23 : ATS 2018 : DE LA CORDE VIBRANTE AU PRINCIPE DU FOUR MICRO-ONDES ONDES
Dans un premier temps, on souhaite étudier le mouvement vertical d’une corde de masse linéique 𝜇 uniforme. Pour cette étude, on étudie un élément de masse 𝑑𝑚 de la corde, de longueur 𝑑ℓ et on impose les hypothèses suivantes :
- Hypothèse 1 : On néglige les frottements. - Hypothèse 2 : La corde, supposée infiniment souple, est constamment tendue. Chaque élément de la
corde est alors soumis à des forces de tension tangentes en tout point à la corde. On note �� (𝑥, 𝑡) la tension qu’exerce à un instant 𝑡 la partie de la corde d‘abscisse supérieure à 𝑥 sur la partie de la corde d’abscisse inférieure à 𝑥.
- Hypothèse 3 : Le poids de chaque élément de la corde est négligeable par rapport aux tensions s’exerçant de part et d’autre de ce brin de corde.
- Hypothèse 4 : On néglige le déplacement horizontal (dans le référentiel d’étude supposé galiléen). Un
point de la corde est repéré à l’équilibre par (𝑥, 0) et est repéré hors équilibre par (𝑥, 𝑦(𝑥, 𝑡)).
- Hypothèse 5 : Le déplacement vertical 𝑦(𝑥, 𝑡) est faible. L’angle 𝛼(𝑥, 𝑡) est supposé petit de sorte qu’il est légitime d’effectuer un développement limité à l’ordre 1 par rapport à cet angle.
Il est demandé, pour les questions 19 et 20 une rédaction rigoureuse au cours de laquelle le candidat précise l’hypothèse (1, 2, 3, 4 ou 5) qu’il utilise à chaque étape importante de son raisonnement.
Corde n° 1 2 3 4 5 6
𝑓1 = fréquence fondamentale (Hz) 82.5 110 147 196 247 330
Diamètre (mm) 1.12 0.89 0.70 0.55 0.35 0.25

Révisions écrits ATS - Mécanique 43 / 46
1. En appliquant le principe fondamental de la dynamique à la partie de corde située entre 𝑥 et 𝑥 + 𝑑𝑥,
et en le projetant sur l’axe horizontal, montrer que la tension est uniforme le long de la corde.
Pour la suite, on notera 𝑇0 la norme, uniforme et constante, de la tension �� du fil.
2. En appliquant le principe fondamental de la dynamique à la partie de corde située entre 𝑥 et 𝑥 + 𝑑𝑥,
et en le projetant sur l’axe vertical, montrer que 𝑦(𝑥, 𝑡) vérifie l’équation aux dérivées partielles :
𝜕2𝑦(𝑥, 𝑡)
𝜕𝑥2−
1
𝑣2 𝜕2𝑦(𝑥, 𝑡)
𝜕𝑡2= 0
On donnera l’expression de 𝑣 en fonction de 𝑇0 et 𝜇.
3. Que représente la grandeur 𝑣 ?
Pour les questions 4 et 5, les deux extrémités de la corde (situées en 𝑥 = 0 et 𝑥 = 𝐿) sont fixes. Afin de
résoudre l’équation aux dérivées partielles précédente, on propose une solution particulière 𝑦(𝑥, 𝑡) à
variables séparées de la forme 𝑦(𝑥, 𝑡) = 𝐴 cos(𝑘 𝑥 − 𝜓) cos(𝜔 𝑡 − 𝜑 ) où 𝐴 est une constante avec 𝑣 =𝜔
𝑘
et où 𝜔 et 𝑘 sont deux grandeurs réelles et positives appelées respectivement pulsation temporelle et
pulsation spatiale de l’onde.
4. Comment qualifier l’onde décrite par l’expression de 𝑦(𝑥, 𝑡) ?
5. Montrer que les conditions aux limites imposent une quantification des pulsations 𝜔𝑛 des ondes
recherchées avec 𝜔𝑛 =𝑛𝜋𝑣
𝐿 où 𝑛 désigne un entier naturel non nul fixant le rang du mode propre.
Pour les questions 6 et 7, l’extrémité d’abscisse 𝑥 = 𝐿 de la corde est fixe et un système excitateur impose à
son extrémité d’abscisse 𝑥 = 0 un petit déplacement transversal
𝑦(0, 𝑡) = 𝑎 cos(Ω𝑡) (avec 𝑎 constante fixant l’amplitude verticale et Ω fixant la pulsation d’excitation).
Pour décrire le régime forcé, nous cherchons une vibration 𝑦(𝑥, 𝑡) de pulsation temporelle Ω et satisfaisant les conditions limites.
Pour ce régime forcé établi, on montre que la solution s’écrit :
𝑦(𝑥, 𝑡) = 𝑎
sin (Ω𝑣
(𝐿 − 𝑥))
sin (Ω𝑣 𝐿)
cos(Ω𝑡)
6. Pour quelles pulsations d’excitation Ω obtient-on des ventres d’amplitude maximale (ici d’amplitude
infinie par absence de modélisation des frottements) ?
7. On remarquera une similitude entre les pulsations pour lesquelles il y a résonance en régime
sinusoïdal forcé et les pulsations des modes propres. Citer un autre système physique pour lequel on
rencontre le même phénomène.
On va maintenant aborder un modèle très simplifié qui assimile le micro-ondes à deux plans métalliques
parfaitement conducteurs, parallèles et distants de 𝐿. Entre ces deux plans, nous supposerons le milieu
assimilable au vide de permittivité diélectrique 𝜀0 et de perméabilité magnétique 𝜇0.

Révisions écrits ATS - Mécanique 44 / 46
Le magnétron présent dans le micro-ondes va générer un champ électromagnétique de fréquence
𝑓 ≈ 2,5 𝐺𝐻𝑧 (cette fréquence a été choisie pour avoir un bon compromis entre la pénétration du champ
dans les aliments et sa dissipation sous forme thermique par interaction avec les molécules d’eau). Pour ce
modèle simple, le champ électrique qui s’établit dans la cavité est tel que �� = 𝐸(𝑥, 𝑡)𝑢𝑦 . On montre que ce
champ électrique vérifie :
- l’équation de propagation suivante : 𝜕2𝐸
𝜕𝑥2 −1
𝑐2 𝜕2𝐸
𝜕𝑡2 = 0 où 𝑐 =1
√𝜀0𝜇0
- les conditions aux limites suivantes : 𝐸(0−, 𝑡) = 𝐸(0+, 𝑡) = 𝐸(𝐿−, 𝑡) = 𝐸(𝐿+, 𝑡) = 0.
8. Justifier les conditions aux limites imposées au champ électrique.
9. En s’inspirant des résultats concernant la corde vibrante, exprimer puis calculer la valeur de 𝐿 qui
permet l’établissement du mode de vibration de rang 5 correspondant à la fréquence 2,5 𝐺𝐻𝑧.
10. Expliquer la présence nécessaire d’un plateau tournant dans un micro-onde si l’on suppose
l’établissement du seul mode de vibration de rang 5.
B. Onde sonore
Une onde est un phénomène physique caractérisé par la variation d’une grandeur physique dans un milieu
initialement au repos. Cette grandeur physique est une pression 𝑃 dans le cas d’une onde sonore.
L’onde est produite par une source et se propage avec une certaine célérité 𝑐 dans le milieu.
On considère une onde sonore émise à la surface et se propageant de manière unidirectionnelle dans l’océan.
L‘expression du champ de pression perturbateur associé à cette onde sonore est :
𝑃(𝑧, 𝑡) = 𝑃1 cos(𝜔𝑡 − 𝑘𝑧)
où • 𝑃1 est une constante positive,
• 𝜔 est la pulsation temporelle de l'onde constante et positive,
• 𝑘 sa pulsation spatiale de l'onde constante et positive,
• 𝑡 la variable temporelle.
11. Donner en les justifiants les dimensions de deux pulsations 𝜔 et 𝑘.
12. Donner l’expression du laplacien ∆𝑃 en coordonnées cartésiennes. En déduire l’expression ∆𝑃 de l’onde
sonore.
13. Il y a propagation d’onde sonore dans le milieu si 𝑃 satisfait à l’équation différentielle suivante :
∆ 𝑃 −1
𝑐2 𝜕2𝑃
𝜕𝑡2= 0
Montrer que cette onde le champ de pression perturbateur 𝑃(𝑧, 𝑡) = 𝑃1 cos(𝜔𝑡 − 𝑘𝑧) se propage à
condition que 𝑐, 𝜔 et 𝑘 soient reliées par une relation que l'on détermina.
14. Vérifier que 𝑐 est bien homogène à une vitesse.
◼ SUJET MK24 : ATS 2019 - ONDE ET IMPEDANCE Ondes mécaniques
a) Impédance d’une corde
On considère une corde sans raideur (n’opposant aucune résistance à la déformation), de masse linéique 𝜇
et tendue à la tension 𝑇0 lorsqu’elle est au repos. On néglige le poids de la corde par rapport à la tension du
fil et on s’intéresse aux petits mouvements verticaux de la corde (les calculs seront tous faits de manière

Révisions écrits ATS - Mécanique 45 / 46
approchée, au premier ordre en 𝜕𝑦
𝜕𝑥). Un point 𝑀, situé à l’abscisse 𝑥 lorsque la corde est au repos, s’est
déplacé de 𝑦(𝑥, 𝑡) selon 𝑂𝑦 :
Chaque élément de la corde est soumis à des forces de tension tangentes en tout point à la corde. On note
�� (𝑥, 𝑡) la tension qu’exerce à un instant 𝑡 la partie de la corde d‘abscisse supérieure à 𝑥 sur la partie de la
corde d’abscisse inférieure à 𝑥. On note 𝛼(𝑥, 𝑡) l’angle que fait la tangente à la corde au point 𝑥 à l’instant 𝑡
avec l’horizontale. Avec les hypothèses de travail, on a dans la base (𝑂𝑥𝑦) :
�� (𝑥, 𝑡) = (𝑇𝑥(𝑥, 𝑡)
𝑇𝑦(𝑥, 𝑡)) ≈ (
𝑇0
𝑇0𝛼(𝑥, 𝑡))
La propagation d’une onde sur cette corde s’accompagne d’un couplage entre 𝑇𝑦(𝑥, 𝑡) « cause » du
mouvement vertical de la corde et 𝑣(𝑥, 𝑡) « conséquence » :
{𝑣(𝑥, 𝑡) =
𝜕𝑦(𝑥, 𝑡)
𝜕𝑥
𝑇𝑦(𝑥, 𝑡) = 𝑇0𝛼(𝑥, 𝑡) = 𝑇0
𝜕𝑦(𝑥, 𝑡)
𝜕𝑥
On considère une onde plane progressive telle que 𝑦+(𝑥, 𝑡) = 𝑓 (𝑡 −𝑥
𝑐) avec 𝑐 = √
𝑇0
𝜇
1. Donner la définition d’une onde progressive. Que représente la grandeur 𝑐 ?
2. Exprimer le champ des vitesses verticales 𝑣+(𝑥, 𝑡) associé à 𝑦+(𝑥, 𝑡) en fonction de 𝑓′(𝑢) où
𝑓′(𝑢) =𝑑𝑓
𝑑𝑢 et 𝑢 = (𝑡 −
𝑥
𝑐).
3. Etablir l’expression de la composante transversale 𝑇𝑦+(𝑥, 𝑡) associée à 𝑦+(𝑥, 𝑡) en fonction de 𝑐, 𝑇0
et 𝑓′.
On définit l’impédance 𝑍 de la corde par la relation 𝑇𝑦+(𝑥, 𝑡) = −𝑍𝑣+(𝑥, 𝑡) avec 𝑍 > 0. 𝑍 est ici une
constante réelle, qui ne dépend que de 𝑇0 et 𝜇.
4. Obtenir l’expression de 𝑍 en fonction de 𝑇0 et 𝜇.
5. Montrer que si l’on considère une onde progressive 𝑦−(𝑥, 𝑡) = 𝑔 (𝑡 +𝑥
𝑐), on a alors
𝑇𝑦−(𝑥, 𝑡) = 𝑍𝑣−(𝑥, 𝑡).
b) Réflexion entre deux cordes
On considère deux cordes semi-infinies : la première, d’impédance 𝑍1, s’étend de 𝑥 = −∞ à
𝑥 = 0, la seconde, d’impédance𝑍2, s’étend de 𝑥 = 0 à 𝑥 = +∞.
Une onde incidente est envoyée dans la première corde. Cette onde est associée à une déformation fixée
par la fonction 𝑦𝑖(𝑥, 𝑡). En 𝑥 = 0, cette onde incidente donne naissance à une onde réfléchie dans la
première corde et une onde transmise dans la seconde corde.

Révisions écrits ATS - Mécanique 46 / 46
L’amplitude de l’onde réfléchie est donnée par la fonction 𝑦𝑟(𝑥, 𝑡) et l’amplitude de l’onde transmise par la
fonction 𝑦𝑡(𝑥, 𝑡).
On note 𝑟𝑦 le coefficient de réflexion en amplitude, défini par 𝑦𝑟(0, 𝑡) = 𝑟𝑦𝑦𝑖(0, 𝑡) et on note 𝑡𝑦 le coefficient
de transmission en amplitude, défini par 𝑦𝑡(0, 𝑡) = 𝑡𝑦𝑦𝑖(0, 𝑡).
6. En admettant la continuité de l’amplitude de la déformation en 𝑥 = 0, établir que :
1 + 𝑟𝑦 = 𝑡𝑦 .
7. En admettant la continuité de la composante verticale 𝑇𝑦 de la tension en 𝑥 = 0, établir que :
𝑍1(𝑟𝑦 − 1) = −𝑍2 𝑡𝑦
8. En déduire alors que 𝑟𝑦 =𝑍1−𝑍2
𝑍1+𝑍2.
On considère l’onde incidente suivante :
9. Dessiner, sur votre copie, l’allure de l’onde réfléchie dans le cas où 𝑍2 ≪ 𝑍1 et dans le cas où 𝑍2 ≫
𝑍1 (pour ces deux situations on admettra qu’aucune énergie mécanique n’est transmise à la seconde corde).
10. On parle d’adaptation d’impédance lorsque 𝑍2 = 𝑍1. Que peut-on affirmer sur l’amplitude de l’onde
réfléchie dans ce cas ?






![Unité 1 unité 2 révisions 1 unité 3 unité 4 révisions 2[2] · 2017. 7. 14. · CORRIGÉ des exercices unité par unité Unité 1 p. 28 Ex 3 1. shù 2. táng 3. hē 4. mà 5](https://img.pdfslide.fr/doc/110x75/5fecefa4b60207651f7e6888/unit-1-unit-2-rvisions-1-unit-3-unit-4-rvisions-22-2017-7-14.jpg)