Embed Size (px)
Citation preview
TD10 – HYPERSTATICITÉ DES MÉCANISMES
1 Partie à préparer1.1 Table vibrante Azalée 1
L’étude des effets d’un séisme sur une structure est encore trop complexe pour pouvoir être abordée
sans un appui expérimental dédié, qui vient en renfort des simulations numériques. La table AZALÉE permet
de reproduire expérimentalement le mouvement du sol ou du plancher d’un bâtiment sur lequel repose la
structure.
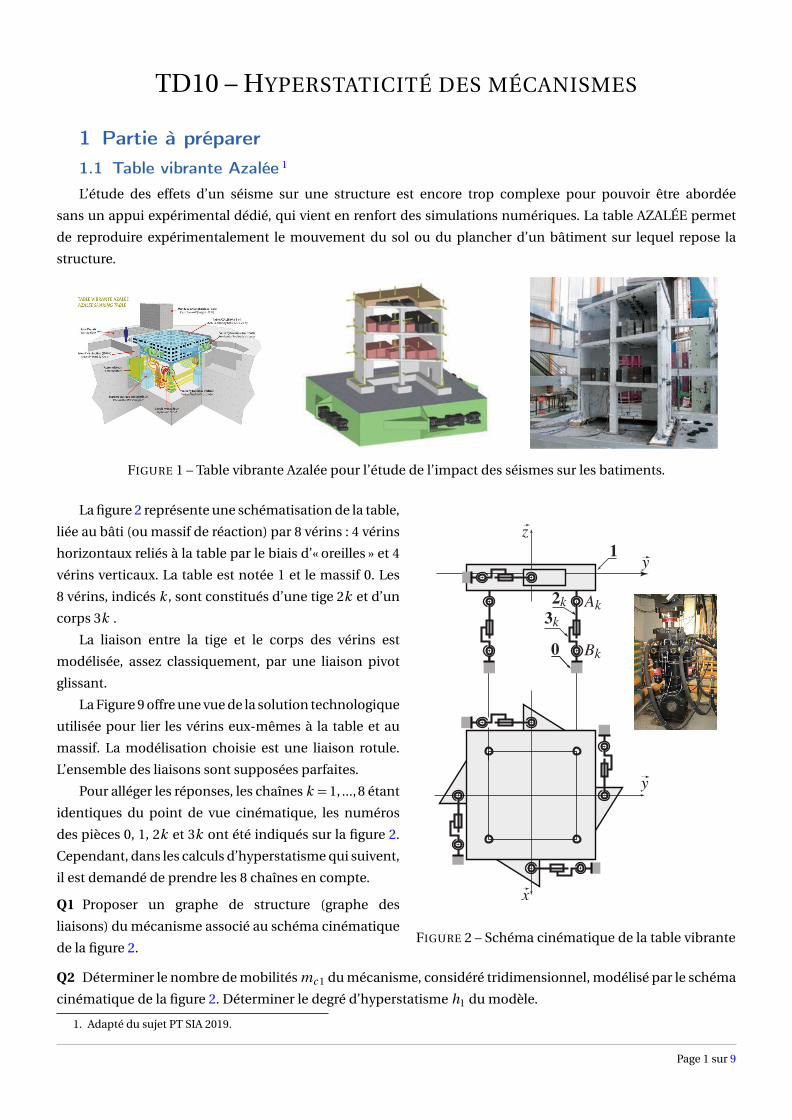
FIGURE 1 – Table vibrante Azalée pour l’étude de l’impact des séismes sur les batiments.
La figure 2 représente une schématisation de la table,
1
2k3k
0
Ak
Bk
x
z
y
y
FIGURE 2 – Schéma cinématique de la table vibrante
liée au bâti (ou massif de réaction) par 8 vérins : 4 vérins
horizontaux reliés à la table par le biais d’« oreilles » et 4
vérins verticaux. La table est notée 1 et le massif 0. Les
8 vérins, indicés k , sont constitués d’une tige 2k et d’un
corps 3k .
La liaison entre la tige et le corps des vérins est
modélisée, assez classiquement, par une liaison pivot
glissant.
La Figure 9 offre une vue de la solution technologique
utilisée pour lier les vérins eux-mêmes à la table et au
massif. La modélisation choisie est une liaison rotule.
L’ensemble des liaisons sont supposées parfaites.
Pour alléger les réponses, les chaînes k = 1, ..., 8 étant
identiques du point de vue cinématique, les numéros
des pièces 0, 1, 2k et 3k ont été indiqués sur la figure 2.
Cependant, dans les calculs d’hyperstatisme qui suivent,
il est demandé de prendre les 8 chaînes en compte.
Q1 Proposer un graphe de structure (graphe des
liaisons) du mécanisme associé au schéma cinématique
de la figure 2.
Q2 Déterminer le nombre de mobilités mc 1 du mécanisme, considéré tridimensionnel, modélisé par le schéma
cinématique de la figure 2. Déterminer le degré d’hyperstatisme h1 du modèle.
1. Adapté du sujet PT SIA 2019.
Page 1 sur 9
Q3 Dans le cas où tous les vérins sont bloqués (ou asservis en position), déterminer le nombre de mobilités mc 2
du mécanisme puis le degré d’hyperstatisme h2 du modèle. Comment appelle-t-on ce type de système ? Quels
vérins pourrait-on enlever pour rendre le système isostatique lorsque les vérins sont bloqués ?
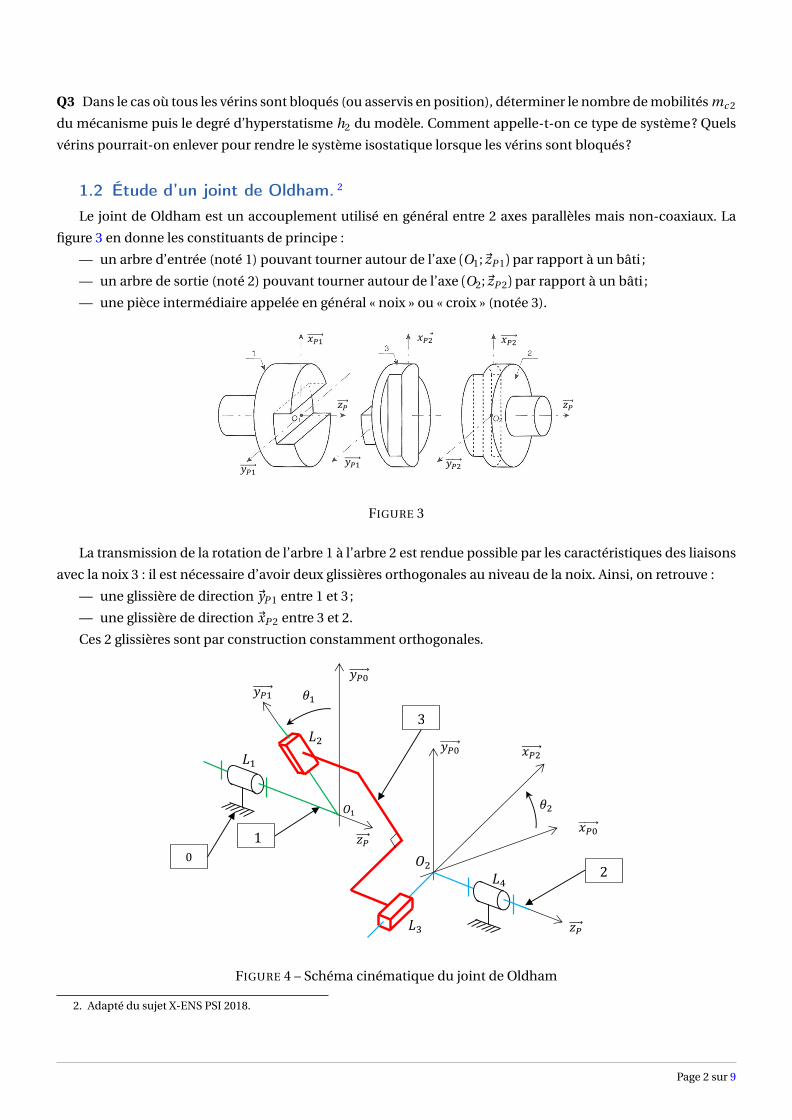
1.2 Étude d’un joint de Oldham. 2
Le joint de Oldham est un accouplement utilisé en général entre 2 axes parallèles mais non-coaxiaux. La
figure 3 en donne les constituants de principe :
— un arbre d’entrée (noté 1) pouvant tourner autour de l’axe (O1; ~zP 1) par rapport à un bâti ;
— un arbre de sortie (noté 2) pouvant tourner autour de l’axe (O2; ~zP 2) par rapport à un bâti ;
— une pièce intermédiaire appelée en général « noix » ou « croix » (notée 3).
FIGURE 3
La transmission de la rotation de l’arbre 1 à l’arbre 2 est rendue possible par les caractéristiques des liaisons
avec la noix 3 : il est nécessaire d’avoir deux glissières orthogonales au niveau de la noix. Ainsi, on retrouve :
— une glissière de direction ~yP 1 entre 1 et 3 ;
— une glissière de direction ~xP 2 entre 3 et 2.
Ces 2 glissières sont par construction constamment orthogonales.
FIGURE 4 – Schéma cinématique du joint de Oldham
2. Adapté du sujet X-ENS PSI 2018.
Page 2 sur 9
La figure 4 représente le paramétrage de ce même joint de Oldham avec B0(~xP 0, ~yP 0, ~zP 0) la base fixe liée au
bâti 0.
Les liaisons entre le bâti 0 et les pièces 1 et 2 sont toutes deux des liaisons pivots d’axes respectifs (L1; ~zP ) et
(L4; ~zP ).
Q4 Calculer le degré d’hyperstatisme de ce modèle d’accouplement à partir des grandeurs cinématiques.
Afin de baisser l’hyperstatisme de l’accouplement, une version alternative est proposée en remplaçant les
liaisons L2 et L3 par des liaisons pivot-glissant toujours d’axes respectifs (O1; ~yP 1) et (O2; ~xP 2).
Q5 Vérifier, à partir d’une analyse basée sur les grandeurs statiques, que le degré d’hyperstatisme a bien diminué
suite à cette modification.
Q6 Proposer une modification permettant de rendre le système isostatique en conservant sa fonctionnalité.
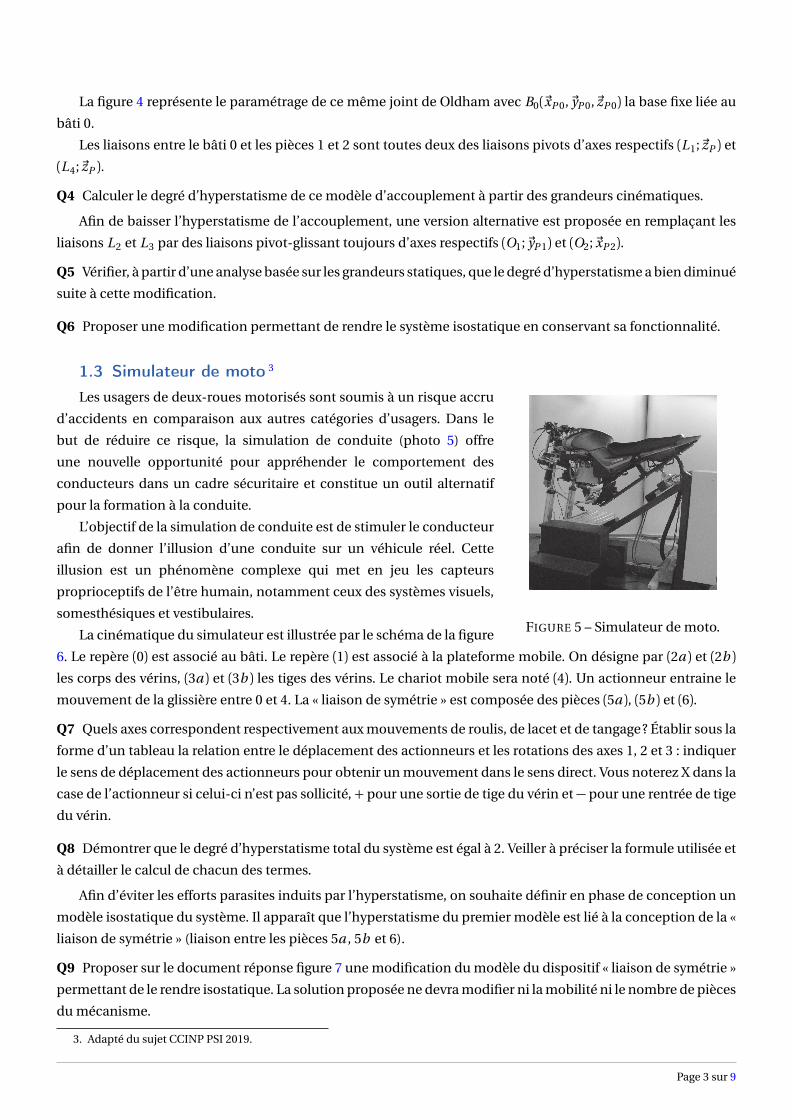
1.3 Simulateur de moto 3
Les usagers de deux-roues motorisés sont soumis à un risque accru
FIGURE 5 – Simulateur de moto.
d’accidents en comparaison aux autres catégories d’usagers. Dans le
but de réduire ce risque, la simulation de conduite (photo 5) offre
une nouvelle opportunité pour appréhender le comportement des
conducteurs dans un cadre sécuritaire et constitue un outil alternatif
pour la formation à la conduite.
L’objectif de la simulation de conduite est de stimuler le conducteur
afin de donner l’illusion d’une conduite sur un véhicule réel. Cette
illusion est un phénomène complexe qui met en jeu les capteurs
proprioceptifs de l’être humain, notamment ceux des systèmes visuels,
somesthésiques et vestibulaires.
La cinématique du simulateur est illustrée par le schéma de la figure
6. Le repère (0) est associé au bâti. Le repère (1) est associé à la plateforme mobile. On désigne par (2a ) et (2b )
les corps des vérins, (3a ) et (3b ) les tiges des vérins. Le chariot mobile sera noté (4). Un actionneur entraine le
mouvement de la glissière entre 0 et 4. La « liaison de symétrie » est composée des pièces (5a ), (5b ) et (6).
Q7 Quels axes correspondent respectivement aux mouvements de roulis, de lacet et de tangage ? Établir sous la
forme d’un tableau la relation entre le déplacement des actionneurs et les rotations des axes 1, 2 et 3 : indiquer
le sens de déplacement des actionneurs pour obtenir un mouvement dans le sens direct. Vous noterez X dans la
case de l’actionneur si celui-ci n’est pas sollicité, + pour une sortie de tige du vérin et − pour une rentrée de tige
du vérin.
Q8 Démontrer que le degré d’hyperstatisme total du système est égal à 2. Veiller à préciser la formule utilisée et
à détailler le calcul de chacun des termes.
Afin d’éviter les efforts parasites induits par l’hyperstatisme, on souhaite définir en phase de conception un
modèle isostatique du système. Il apparaît que l’hyperstatisme du premier modèle est lié à la conception de la «
liaison de symétrie » (liaison entre les pièces 5a , 5b et 6).
Q9 Proposer sur le document réponse figure 7 une modification du modèle du dispositif « liaison de symétrie »
permettant de le rendre isostatique. La solution proposée ne devra modifier ni la mobilité ni le nombre de pièces
du mécanisme.
3. Adapté du sujet CCINP PSI 2019.
Page 3 sur 9
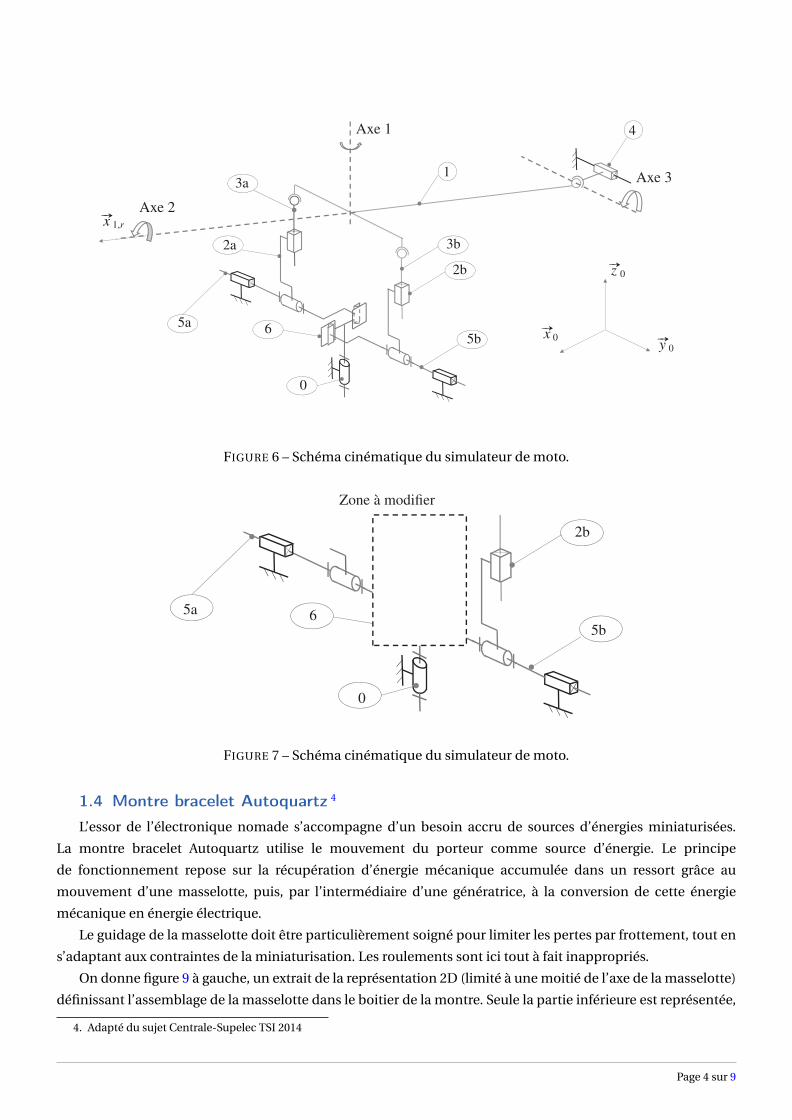
FIGURE 6 – Schéma cinématique du simulateur de moto.
FIGURE 7 – Schéma cinématique du simulateur de moto.
1.4 Montre bracelet Autoquartz 4
L’essor de l’électronique nomade s’accompagne d’un besoin accru de sources d’énergies miniaturisées.
La montre bracelet Autoquartz utilise le mouvement du porteur comme source d’énergie. Le principe
de fonctionnement repose sur la récupération d’énergie mécanique accumulée dans un ressort grâce au
mouvement d’une masselotte, puis, par l’intermédiaire d’une génératrice, à la conversion de cette énergie
mécanique en énergie électrique.
Le guidage de la masselotte doit être particulièrement soigné pour limiter les pertes par frottement, tout en
s’adaptant aux contraintes de la miniaturisation. Les roulements sont ici tout à fait inappropriés.
On donne figure 9 à gauche, un extrait de la représentation 2D (limité à une moitié de l’axe de la masselotte)
définissant l’assemblage de la masselotte dans le boitier de la montre. Seule la partie inférieure est représentée,
4. Adapté du sujet Centrale-Supelec TSI 2014
Page 4 sur 9
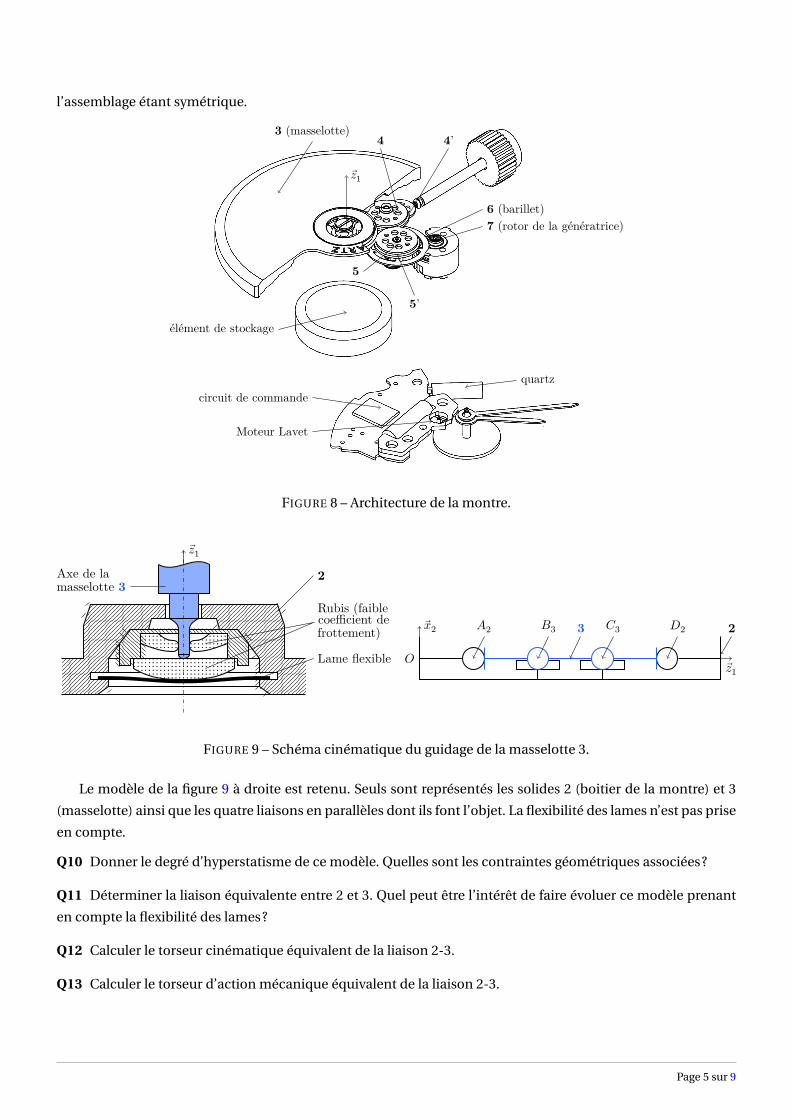
l’assemblage étant symétrique.
FIGURE 8 – Architecture de la montre.
FIGURE 9 – Schéma cinématique du guidage de la masselotte 3.
Le modèle de la figure 9 à droite est retenu. Seuls sont représentés les solides 2 (boitier de la montre) et 3
(masselotte) ainsi que les quatre liaisons en parallèles dont ils font l’objet. La flexibilité des lames n’est pas prise
en compte.
Q10 Donner le degré d’hyperstatisme de ce modèle. Quelles sont les contraintes géométriques associées ?
Q11 Déterminer la liaison équivalente entre 2 et 3. Quel peut être l’intérêt de faire évoluer ce modèle prenant
en compte la flexibilité des lames ?
Q12 Calculer le torseur cinématique équivalent de la liaison 2-3.
Q13 Calculer le torseur d’action mécanique équivalent de la liaison 2-3.
Page 5 sur 9
2 Partie traitée en TD2.1 Tuyère à ouverture variable 5
Les propulseurs utilisés dans les applications militaires ou civiles subissent, avant leur mise en service, des
tests de certification visant à contrôler leur bon fonctionnement et le respect des normes de sécurité.
Ces tests consistent à simuler au sol les conditions de vol subies par le propulseur et à observer les réactions
de celui-ci consécutives à des commandes de pilotage.
La DGA (Direction Générale de l’Armement) dispose dans son centre d’essais des propulseurs, situé à Saclay,
de bancs d’essais dédiés à la certification et à la mise au point de différents types de propulseurs d’avions ou de
missiles.
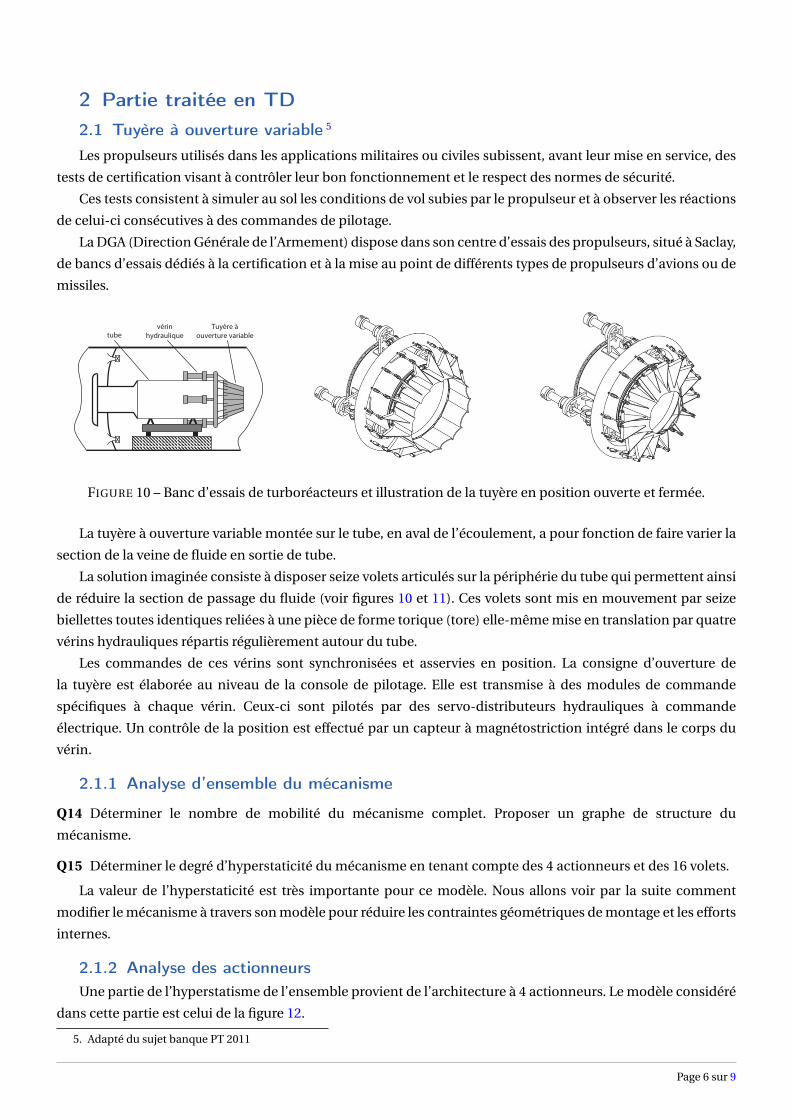
FIGURE 10 – Banc d’essais de turboréacteurs et illustration de la tuyère en position ouverte et fermée.
La tuyère à ouverture variable montée sur le tube, en aval de l’écoulement, a pour fonction de faire varier la
section de la veine de fluide en sortie de tube.
La solution imaginée consiste à disposer seize volets articulés sur la périphérie du tube qui permettent ainsi
de réduire la section de passage du fluide (voir figures 10 et 11). Ces volets sont mis en mouvement par seize
biellettes toutes identiques reliées à une pièce de forme torique (tore) elle-même mise en translation par quatre
vérins hydrauliques répartis régulièrement autour du tube.
Les commandes de ces vérins sont synchronisées et asservies en position. La consigne d’ouverture de
la tuyère est élaborée au niveau de la console de pilotage. Elle est transmise à des modules de commande
spécifiques à chaque vérin. Ceux-ci sont pilotés par des servo-distributeurs hydrauliques à commande
électrique. Un contrôle de la position est effectué par un capteur à magnétostriction intégré dans le corps du
vérin.
2.1.1 Analyse d’ensemble du mécanisme
Q14 Déterminer le nombre de mobilité du mécanisme complet. Proposer un graphe de structure du
mécanisme.
Q15 Déterminer le degré d’hyperstaticité du mécanisme en tenant compte des 4 actionneurs et des 16 volets.
La valeur de l’hyperstaticité est très importante pour ce modèle. Nous allons voir par la suite comment
modifier le mécanisme à travers son modèle pour réduire les contraintes géométriques de montage et les efforts
internes.
2.1.2 Analyse des actionneursUne partie de l’hyperstatisme de l’ensemble provient de l’architecture à 4 actionneurs. Le modèle considéré
dans cette partie est celui de la figure 12.
5. Adapté du sujet banque PT 2011
Page 6 sur 9
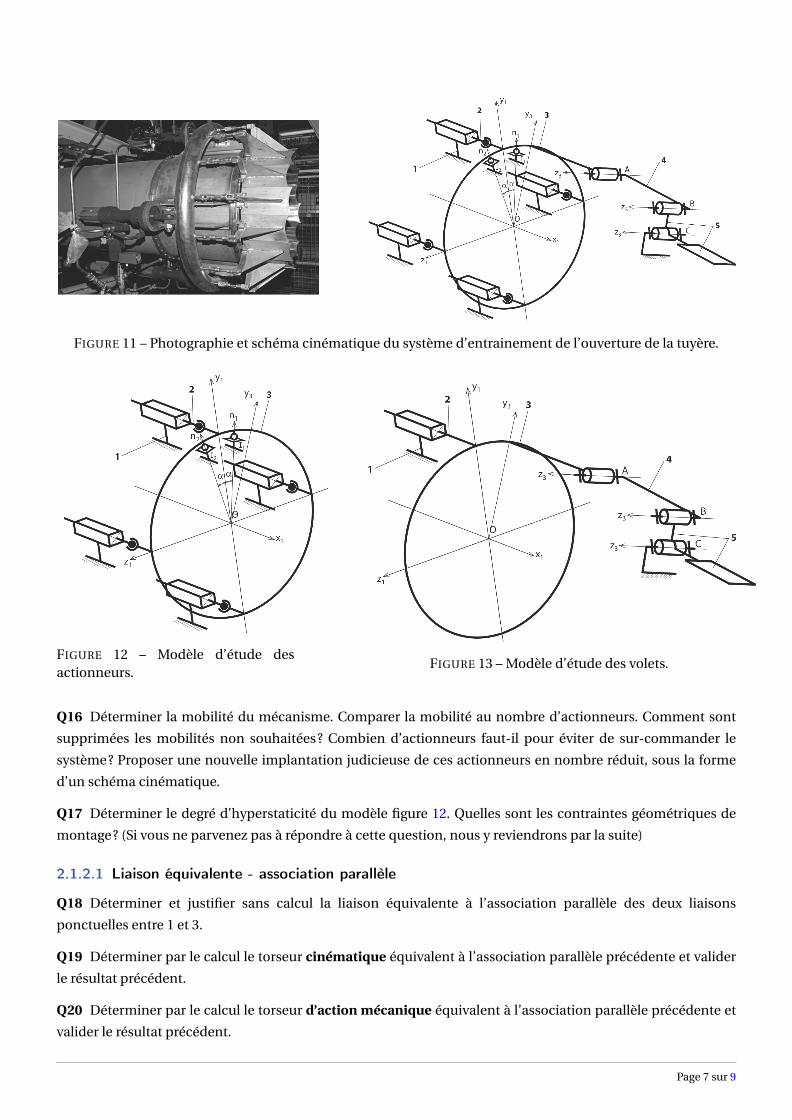
FIGURE 11 – Photographie et schéma cinématique du système d’entrainement de l’ouverture de la tuyère.
FIGURE 12 – Modèle d’étude desactionneurs.
FIGURE 13 – Modèle d’étude des volets.
Q16 Déterminer la mobilité du mécanisme. Comparer la mobilité au nombre d’actionneurs. Comment sont
supprimées les mobilités non souhaitées ? Combien d’actionneurs faut-il pour éviter de sur-commander le
système ? Proposer une nouvelle implantation judicieuse de ces actionneurs en nombre réduit, sous la forme
d’un schéma cinématique.
Q17 Déterminer le degré d’hyperstaticité du modèle figure 12. Quelles sont les contraintes géométriques de
montage ? (Si vous ne parvenez pas à répondre à cette question, nous y reviendrons par la suite)
2.1.2.1 Liaison équivalente - association parallèle
Q18 Déterminer et justifier sans calcul la liaison équivalente à l’association parallèle des deux liaisons
ponctuelles entre 1 et 3.
Q19 Déterminer par le calcul le torseur cinématique équivalent à l’association parallèle précédente et valider
le résultat précédent.
Q20 Déterminer par le calcul le torseur d’action mécanique équivalent à l’association parallèle précédente et
valider le résultat précédent.
Page 7 sur 9
2.1.2.2 Liaison équivalente - association série
Q21 Déterminer et justifier sans calcul la liaison équivalente à l’association série des liaisons glissière entre 1 et
2 puis rotule entre 2 et 3.
Q22 Déterminer par le calcul le torseur cinématique équivalent à l’association parallèle précédente et valider
le résultat précédent.
Q23 Déterminer par le calcul le torseur d’action mécanique équivalent à l’association parallèle précédente et
valider le résultat précédent.
2.1.2.3 Liaison équivalente globale
Q24 Déduire des liaisons équivalentes trouvées dans les deux paragraphes précédent la liaison équivalente
globale entre 1 et 3. Si vous n’aviez pas su trouver les contraintes géométrique de montage, pourriez-vous
maintenant les donner ?
Q25 Modifier le modèle pour proposer une architecture isostatique de l’ensemble des 4 actionneur. Représenter
la nouvelle architecture sous la forme d’un schéma cinématique.
Q26 Expliquer pourquoi le modèle envisagé par la suite est celui de la figure 13.
2.1.3 Analyse des voletsOn adopte désormais le modèle de la figure 13 en ne considérant qu’un seul volet.
Q27 Quelle est la mobilité du mécanisme ? Déterminer le degré d’hyperstaticité du modèle.
Q28 Quelles sont les contraintes de montage associées à cette hyperstaticité ?
Sachant que le mécanisme de volet est multiplié par 16 exemplaires, on souhaite limiter les contraintes de
montage.
Q29 Proposer sous la forme d’un schéma cinématique une nouvelle architecture isostatique du système de
volet.
2.2 Grue de déchargement des porte-conteneurs panamax 6
Le transport des marchandises (hydrocarbures, charbon,
agroalimentaire, ciment, matériaux de construction, biens
de consommation. . . ) à travers le monde est incontournable
dans l’économie moderne. Excepté les matières premières, ces
marchandises sont envoyées par conteneurs. Au port de Marseille
(premier port français), 950 000 conteneurs transitent chaque année,
soit 9 millions de tonnes de marchandises et 1 300 navires.
Les conteneurs sont des boites standardisées, d’une masse
maximale de 40 tonnes, permettant de transporter des marchandises
du fournisseur au client par navire, train, camion, voire par avion, sans déballer la marchandise. Les navires
Post-Panamax sont les plus gros navires de transport et peuvent embarquer jusqu’à 13 000 conteneurs. Pour
rejoindre sa destination finale, un conteneur changera plusieurs fois de navire. Il sera déchargé puis rechargé
par des grues dans des plateformes portuaires, véritables hubs du réseau maritime.
6. Adapté du sujet Centrale-Supélec PSI 2013
Page 8 sur 9
Poutresupérieure
Poutreinférieure
Supportde galet
Portique
Galet
C
ARail
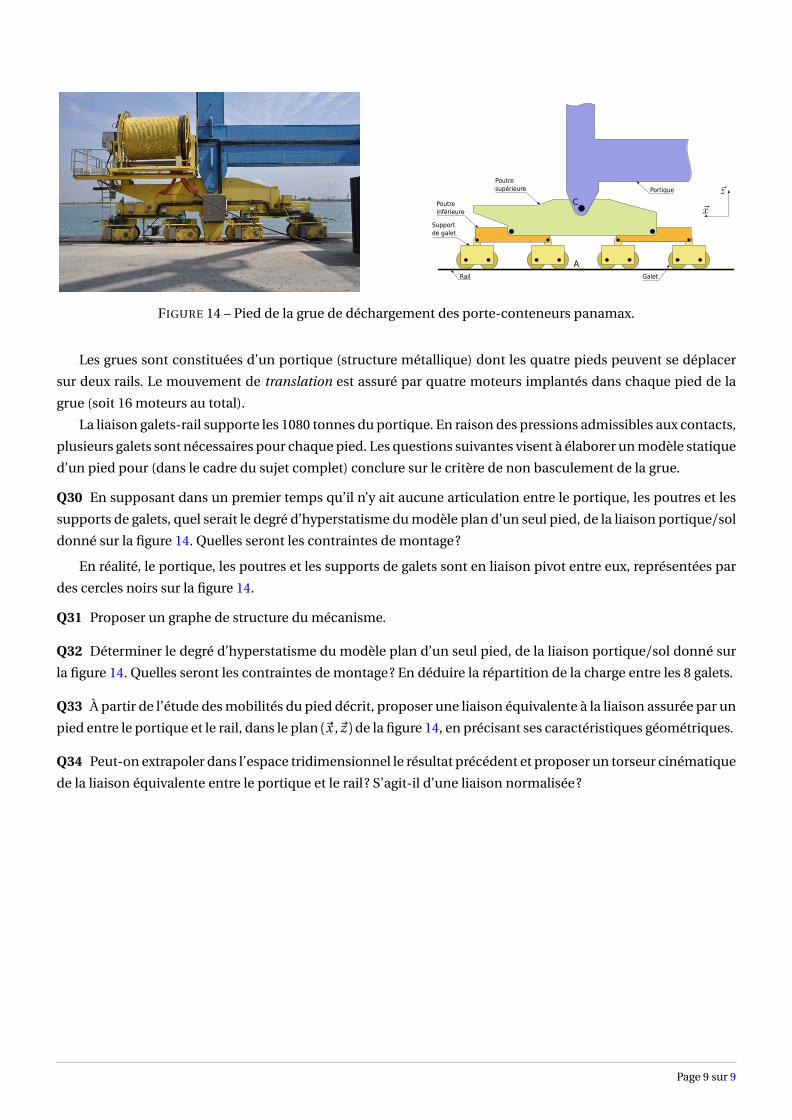
FIGURE 14 – Pied de la grue de déchargement des porte-conteneurs panamax.
Les grues sont constituées d’un portique (structure métallique) dont les quatre pieds peuvent se déplacer
sur deux rails. Le mouvement de translation est assuré par quatre moteurs implantés dans chaque pied de la
grue (soit 16 moteurs au total).
La liaison galets-rail supporte les 1080 tonnes du portique. En raison des pressions admissibles aux contacts,
plusieurs galets sont nécessaires pour chaque pied. Les questions suivantes visent à élaborer un modèle statique
d’un pied pour (dans le cadre du sujet complet) conclure sur le critère de non basculement de la grue.
Q30 En supposant dans un premier temps qu’il n’y ait aucune articulation entre le portique, les poutres et les
supports de galets, quel serait le degré d’hyperstatisme du modèle plan d’un seul pied, de la liaison portique/sol
donné sur la figure 14. Quelles seront les contraintes de montage ?
En réalité, le portique, les poutres et les supports de galets sont en liaison pivot entre eux, représentées par
des cercles noirs sur la figure 14.
Q31 Proposer un graphe de structure du mécanisme.
Q32 Déterminer le degré d’hyperstatisme du modèle plan d’un seul pied, de la liaison portique/sol donné sur
la figure 14. Quelles seront les contraintes de montage ? En déduire la répartition de la charge entre les 8 galets.
Q33 À partir de l’étude des mobilités du pied décrit, proposer une liaison équivalente à la liaison assurée par un
pied entre le portique et le rail, dans le plan (~x , ~z ) de la figure 14, en précisant ses caractéristiques géométriques.
Q34 Peut-on extrapoler dans l’espace tridimensionnel le résultat précédent et proposer un torseur cinématique
de la liaison équivalente entre le portique et le rail ? S’agit-il d’une liaison normalisée ?
Page 9 sur 9





























