Embed Size (px)
Citation preview
1/142
26/09/07 09:09
Académie de Montpellier UNIVERSITE MONTPELLIER II
— SCIENCES ET TECHNIQUES DU LANGUEDOC —
ffffffffff�
THESE
pour obtenir le grade de DOCTEUR DE L'UNIVERSITE MONTPELLIER II
SPECIALITE : Mécanique, Génie Mécanique, Génie Civil Formation doctorale : Mécanique des Matériaux, Structures, Génie des Procédés Ecole Doctorale : Sciences pour l'Ingénieur
présentée et soutenue publiquement par
François LE ROHELLEC
le 10 juillet 1998
IDENTIFICATION DES MATRICES PHYSIQUES DANS L’ESPACE ETAT
RECOMBINAISON DE SOUS-REPRESENTATIONS
——— Directeur de thèse : Bernard Crosnier
———
JURY R. Motro Professeur Université Montpellier II Président S. Bellizzi Chargé de Recherche, LMA, Marseille Rapporteur L. Jézequel Professeur, Ecole Centrale de Lyon Rapporteur O. Maisonneuve Professeur, Université Montpellier II Examinateur C. Saix Professeur, Université Montpellier II Examinateur
B. Crosnier Maître de Conférences, Université Montpellier II Directeur de Thèse

3/142
26/09/07 09:09
Remerciements
Ce travail est l’aboutissement de trois années de recherche effectuées au Laboratoire de Mécanique et Génie Civil de l’université Montpellier II dans le cadre d’un financement d’Allocataire de Recherche.
La présente thèse a été préparée sous la responsabilité scientifique de Monsieur Bernard Crosnier à qui j’exprime ma plus vive gratitude.
Je remercie Monsieur R. Motro, Professeur et responsable de l’équipe Conception en Structures du Laboratoire de Mécanique et Génie Civil de m’avoir fait l’honneur de présider le jury de cette thèse.
Messieurs les Professeurs L. Jézéquel et S. Bellizzi ont accepté d’être les rapporteurs de ce travail ; je les remercie pour leur lecture approfondie de ce document et les remarques judicieuses qu’il m’ont faites à son sujet.
Mes remerciement vont également à Messieurs O. Maisonneuve et C. Saix qui ont examiné ce travail et fait partie du jury.
Enfin, j’adresse à tous les membres du laboratoire de Mécanique et Génie Civil le témoignage de ma réelle sympathie et ma reconnaissance pour l’accueil chaleureux qu’ils m’ont toujours réservé.

5/142
Table des matières
Remerciements _____________________________________________________________ 3
Table des matières __________________________________________________________ 5
1. Introduction générale______________________________________________________ 9
1.1. Modélisation et identification __________________________________________________9
1.2. Identification temporelle dans l’espace état______________________________________10
1.3. Lignes directrices et plan de l’étude ____________________________________________11
2. Représentation d’état : théorie - applications __________________________________ 17
2.1. Représentation espace état déterministe ________________________________________17 2.1.1. Introduction - modélisation des processus______________________________________________17 2.1.2. Application aux systèmes mécaniques ________________________________________________19
2.1.2.1. Equation classique de la dynamique_______________________________________________19 2.1.2.2. Représentation d’état continue ___________________________________________________19
2.1.3. Représentation d’état discrète _______________________________________________________20 2.1.4. Représentations d’état similaires_____________________________________________________21 2.1.5. Une représentation similaire particulière : la forme modale ________________________________21 2.1.6. Fonctions de transfert et caractéristiques modales _______________________________________22 2.1.7. Observabilité et commandabilité_____________________________________________________23
2.1.7.1. Position du problème __________________________________________________________23 2.1.7.2. Commandabilité ______________________________________________________________23 2.1.7.3. Observabilité ________________________________________________________________23 2.1.7.4. Stabilité et détectabilité ________________________________________________________24
2.2. Reconstitution des matrices physiques__________________________________________24 2.2.1. Théorème ______________________________________________________________________24 2.2.2. Reconstitution de M, C et K ________________________________________________________25
2.2.2.1. Premier cas : le nombre d’entrées est égal au nombre de modes identifiés _________________25 2.2.2.2. Deuxième cas : le nombre d’entrées est inférieur au nombre de modes identifiés ____________25 2.2.2.3. Récapitulatif schématique ______________________________________________________26
2.3. Recombinaison de plusieurs représentations d’état partielles_______________________27 2.3.1. Méthode n°1 : usage d’une base commune quelconque ___________________________________28
2.3.1.1. Principe ____________________________________________________________________28 2.3.1.2. Calcul de la matrice de passage P ________________________________________________29 2.3.1.3. Combinaison linéaire des deux représentations d’état dans la même base__________________30
2.3.2. Méthode n°2 : usage de la base à interprétation physique__________________________________30 2.3.2.1. Principe ____________________________________________________________________30 2.3.2.2. Remarques et bilan____________________________________________________________31
2.3.3. Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M__32 2.3.3.1. Principe ____________________________________________________________________32 2.3.3.2. Remarques et bilan____________________________________________________________34
2.3.4. Conclusion _____________________________________________________________________34
2.4. Réduction et raffinement des modèles __________________________________________35
3. Identification sous-espace déterministe - stochastique___________________________ 37
6/142 Table des matières
3.1. Description du problème _____________________________________________________37
3.2. Préliminaires : définitions, notations et propriétés________________________________38
3.3. Identification combinée ______________________________________________________42 3.3.1. Théorème principal _______________________________________________________________43
3.3.1.1. L’algorithme N4sidr ___________________________________________________________45 3.3.1.2. L'algorithme Moesp ___________________________________________________________45 3.3.1.3. Bilan et remarques ____________________________________________________________45 3.3.1.4. Implémentation numérique______________________________________________________46
3.3.2. Calcul de la représentation d’état ____________________________________________________48 3.3.2.1. L’algorithme N4sidr ___________________________________________________________48 3.3.2.2. L’algorithme Moesp___________________________________________________________49 3.3.2.3. Implémentation numérique______________________________________________________50
4. Simulations numériques __________________________________________________ 53
4.1. Identification autonome des matrices physiques__________________________________54 4.1.1. Evaluation des résultats____________________________________________________________54 4.1.2. Analyse des résultats ______________________________________________________________55
4.1.2.1. Résultats à 0% de bruit_________________________________________________________55 4.1.2.2. Résultats à 1% de bruit_________________________________________________________55 4.1.2.3. Résultats à 10% de bruit________________________________________________________56
4.1.3. Conclusion _____________________________________________________________________57
4.2. Recombinaison de plusieurs représentations d'état _______________________________57 4.2.1. Evaluation des résultats____________________________________________________________58
4.2.1.1. Erreur d’exactitude____________________________________________________________58 4.2.1.2. Erreur de consistance __________________________________________________________59
4.2.2. Hypothèses et méthodologie générale _________________________________________________59 4.2.3. Méthode n°1 : usage d’une base commune quelconque ___________________________________60
4.2.3.1. Analyse pour 0% de bruit_______________________________________________________61 4.2.3.2. Analyse pour 1% et 10% de bruit_________________________________________________68 4.2.3.3. Bilan_______________________________________________________________________77
4.2.4. Méthode n°2 : usage de la base à interprétation physique__________________________________78 4.2.4.1. Analyse pour 0% de bruit_______________________________________________________79 4.2.4.2. Analyse pour 1% et 10% de bruit_________________________________________________85 4.2.4.3. Bilan_______________________________________________________________________90
4.2.5. Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M__90 4.2.5.1. Analyse pour 0% de bruit_______________________________________________________93 4.2.5.2. Analyse pour 1% et 10% de bruit_________________________________________________98 4.2.5.3. Bilan______________________________________________________________________104
4.2.6. Conclusion ____________________________________________________________________104
5. Evaluations expérimentales _______________________________________________ 107
5.1. Environnement expérimental ________________________________________________107
5.2. Evaluation des résultats _____________________________________________________109 5.2.1. Critère MAC (Modal Assurance Criteria)_____________________________________________110 5.2.2. Indicateur de cohérence d’observabilité ______________________________________________110
5.3. Identification autonome des matrices physiques_________________________________110 5.3.1. Poutre sans masse additionnelle ____________________________________________________111 5.3.2. Poutre avec charge additionnelle au noeud 2 __________________________________________116 5.3.3. Poutre avec charge additionnelle au noeud 1 __________________________________________117 5.3.4. Bilan _________________________________________________________________________118
5.4. Recombinaison de plusieurs représentations d'état ______________________________118 5.4.1. Méthode n°1 : usage d’une base commune quelconque __________________________________119
5.4.1.1. Analyse des résultats _________________________________________________________119 5.4.1.2. Bilan______________________________________________________________________129
5.4.2. Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M_130
7/142
5.4.2.1. Analyse des résultats _________________________________________________________130 5.4.2.2. Bilan______________________________________________________________________132
5.5. Conclusion ________________________________________________________________132
6. Conclusion générale et perspectives ________________________________________ 135
7. Références bibliographiques ______________________________________________ 139

9/142
1. Introduction générale
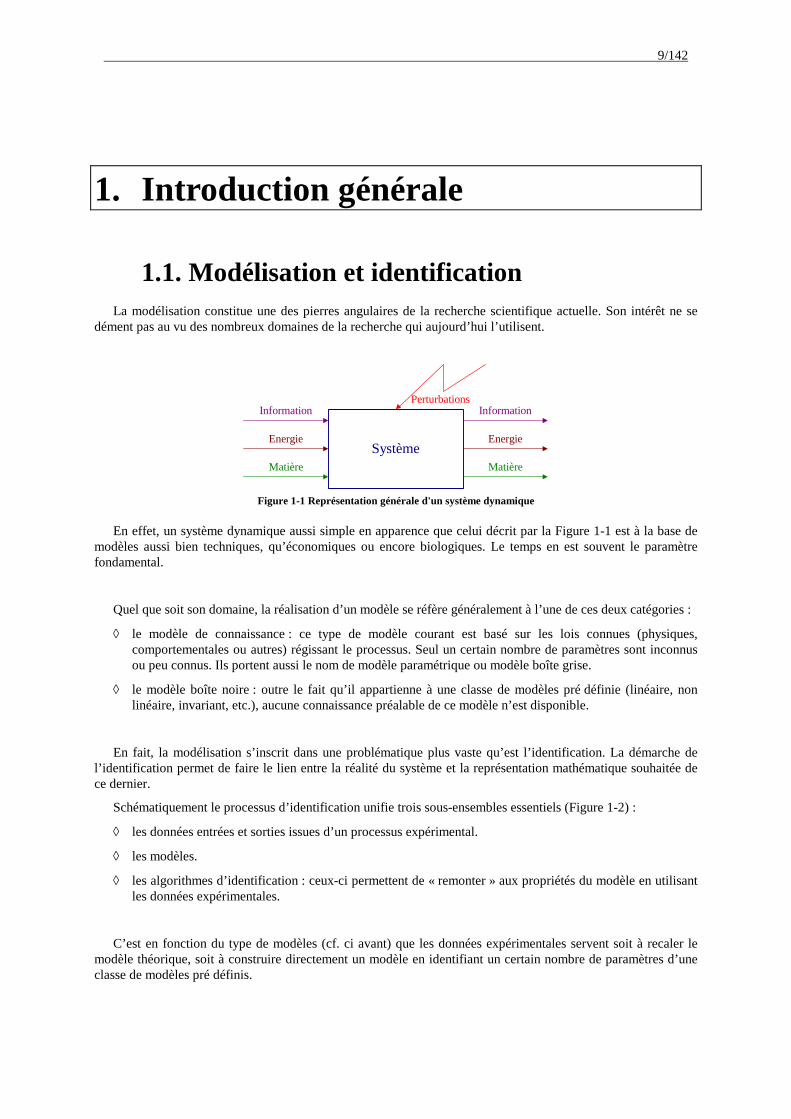
1.1. Modélisation et identification La modélisation constitue une des pierres angulaires de la recherche scientifique actuelle. Son intérêt ne se
dément pas au vu des nombreux domaines de la recherche qui aujourd’hui l’utilisent.
Système
Information Information
Energie Energie
Matière Matière
Perturbations
Figure 1-1 Représentation générale d'un système dynamique
En effet, un système dynamique aussi simple en apparence que celui décrit par la Figure 1-1 est à la base de modèles aussi bien techniques, qu’économiques ou encore biologiques. Le temps en est souvent le paramètre fondamental.
Quel que soit son domaine, la réalisation d’un modèle se réfère généralement à l’une de ces deux catégories :
◊ le modèle de connaissance : ce type de modèle courant est basé sur les lois connues (physiques, comportementales ou autres) régissant le processus. Seul un certain nombre de paramètres sont inconnus ou peu connus. Ils portent aussi le nom de modèle paramétrique ou modèle boîte grise.
◊ le modèle boîte noire : outre le fait qu’il appartienne à une classe de modèles pré définie (linéaire, non linéaire, invariant, etc.), aucune connaissance préalable de ce modèle n’est disponible.
En fait, la modélisation s’inscrit dans une problématique plus vaste qu’est l’identification. La démarche de l’identification permet de faire le lien entre la réalité du système et la représentation mathématique souhaitée de ce dernier.
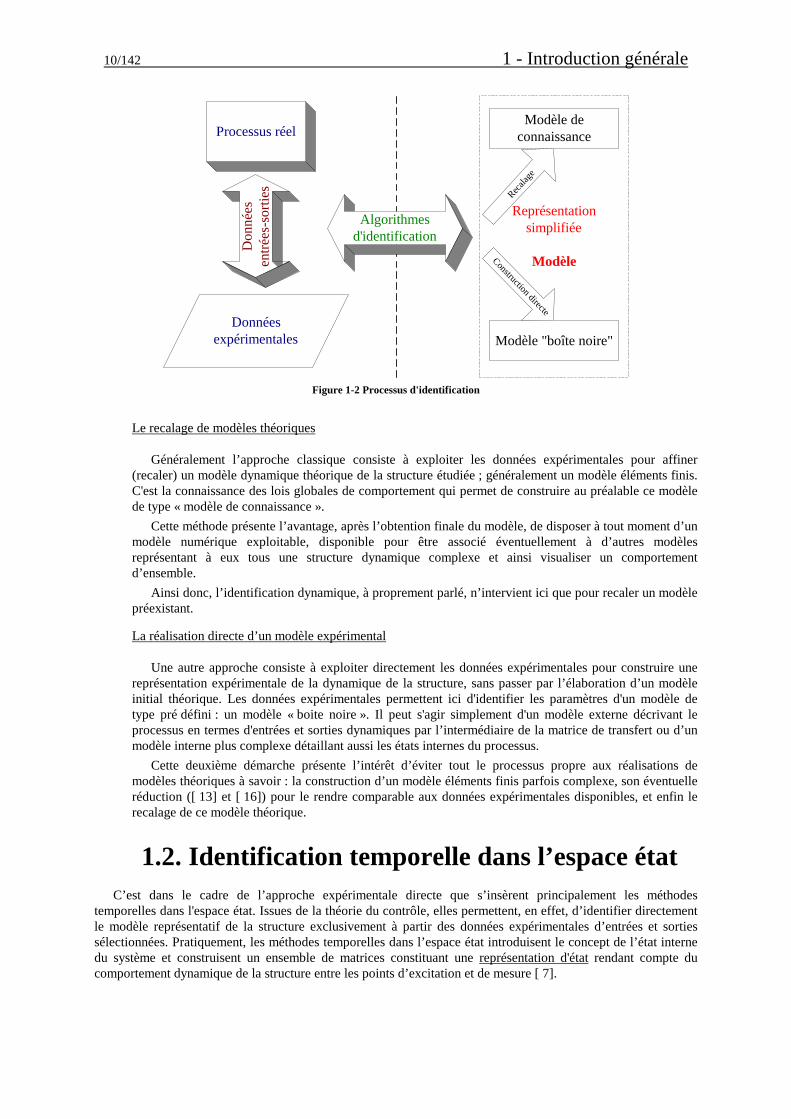
Schématiquement le processus d’identification unifie trois sous-ensembles essentiels (Figure 1-2) :
◊ les données entrées et sorties issues d’un processus expérimental.
◊ les modèles.
◊ les algorithmes d’identification : ceux-ci permettent de « remonter » aux propriétés du modèle en utilisant les données expérimentales.
C’est en fonction du type de modèles (cf. ci avant) que les données expérimentales servent soit à recaler le modèle théorique, soit à construire directement un modèle en identifiant un certain nombre de paramètres d’une classe de modèles pré définis.
10/142 1 - Introduction générale
Représentationsimplifiée
Modèle
Algorithmesd'identification
Donnéesexpérimentales
Processus réel
Don
nées
entr
ées-
sort
ies
Modèle deconnaissance
Modèle "boîte noire"
Construction directe
Recala
ge
Figure 1-2 Processus d'identification
Le recalage de modèles théoriques
Généralement l’approche classique consiste à exploiter les données expérimentales pour affiner (recaler) un modèle dynamique théorique de la structure étudiée ; généralement un modèle éléments finis. C'est la connaissance des lois globales de comportement qui permet de construire au préalable ce modèle de type « modèle de connaissance ».
Cette méthode présente l’avantage, après l’obtention finale du modèle, de disposer à tout moment d’un modèle numérique exploitable, disponible pour être associé éventuellement à d’autres modèles représentant à eux tous une structure dynamique complexe et ainsi visualiser un comportement d’ensemble.
Ainsi donc, l’identification dynamique, à proprement parlé, n’intervient ici que pour recaler un modèle préexistant.
La réalisation directe d’un modèle expérimental
Une autre approche consiste à exploiter directement les données expérimentales pour construire une représentation expérimentale de la dynamique de la structure, sans passer par l’élaboration d’un modèle initial théorique. Les données expérimentales permettent ici d'identifier les paramètres d'un modèle de type pré défini : un modèle « boite noire ». Il peut s'agir simplement d'un modèle externe décrivant le processus en termes d'entrées et sorties dynamiques par l’intermédiaire de la matrice de transfert ou d’un modèle interne plus complexe détaillant aussi les états internes du processus.
Cette deuxième démarche présente l’intérêt d’éviter tout le processus propre aux réalisations de modèles théoriques à savoir : la construction d’un modèle éléments finis parfois complexe, son éventuelle réduction ([ 13] et [ 16]) pour le rendre comparable aux données expérimentales disponibles, et enfin le recalage de ce modèle théorique.
1.2. Identification temporelle dans l’espace état C’est dans le cadre de l’approche expérimentale directe que s’insèrent principalement les méthodes
temporelles dans l'espace état. Issues de la théorie du contrôle, elles permettent, en effet, d’identifier directement le modèle représentatif de la structure exclusivement à partir des données expérimentales d’entrées et sorties sélectionnées. Pratiquement, les méthodes temporelles dans l’espace état introduisent le concept de l’état interne du système et construisent un ensemble de matrices constituant une représentation d'état rendant compte du comportement dynamique de la structure entre les points d’excitation et de mesure [ 7].

Identification temporelle dans l’espace état - 1.2 11/142
Le principe de réalisation d’un modèle uniquement à partir des données expérimentales (pas de modèle théorique préalable) - donc aisément mis à jour - permet d’envisager un grand nombre d’applications pratiques ayant rapport aux structures variables dans le temps :
◊ suivi du vieillissement (fatigue, endommagements)
◊ suivi d’états intermédiaires (processus volontaires : structures mobiles, évolutives, pliages et dépliages)
Par ailleurs, la représentation d’état des systèmes dynamiques structurels discrétisés offre des possibilités - sous certaines conditions - d’identifier directement outre les caractéristiques modales classiques (fréquences propres, taux d’amortissement, base modale), les paramètres physiques de masses, raideurs et amortissements de la structure considérée.
Or jusqu’alors, peu de recherches ont été entreprises dans ce domaine de l’identification des structures dans l’espace état. Pourtant, les méthodes temporelles espace état permettent bien souvent de franchir les limites des méthodes fréquentielles en s’affranchissant du traitement des fonctions de transfert (mauvais conditionnement des systèmes polynomiaux en particulier) pour identifier les paramètres modaux.
Toutefois, il reste qu’un certain nombre de limitations liées à des problèmes numériques, la surestimation de l'ordre du système ou encore la récursivité réduisent la portée utile de ces méthodes [ 30] [ 50].
Les méthodes sous-espace
C’est pourquoi, les méthodes d'identification dites sous espace dans l’espace état, développées ces dernières années, s’avèrent être une alternative extrêmement prometteuse. En effet, ces récents algorithmes identifient le modèle espace état « directement » à partir des données d’entrée et de sortie sans passer par des étapes intermédiaires telles que la détermination des paramètres de Markov [ 50] estimés à partir de la réponse impulsionnelle de la structure.
Par ailleurs et ce contrairement aux méthodes classiques dans l’espace état, les algorithmes sous-espace n’ont pas besoin de surestimer préalablement l'ordre pratique du modèle physique. Ils s’affranchissent donc d’un nombre important de paramètrages préliminaires intrinsèques et permettent en outre l’obtention rapide d’un modèle sans phase importante de réduction.
Les méthodes sous-espace introduites ci avant ont déjà fait l’objet d’études d’évaluation [ 1] au sein du laboratoire de Mécanique et Génie Civil de Montpellier et ont démontré des performances très élevées comparativement d’une part aux modèles plus classiques de type entrées/sorties (ARMA, ARX, etc.) et d’autres part aux algorithmes d’identification temporels eux aussi bien connus de la classe ERA (Eigensystem Realization Algorithm) [ 2] [ 26] [ 27]. Les évaluations ont aussi bien porté sur des analyses numériques que sur la confrontation de ces nouveaux algorithmes à des structures industrielles.
1.3. Lignes directrices et plan de l’étude Les développements applicatifs des structures complexes réticulées, dont font partie les systèmes constructifs
innovants à base de barres et câbles (Figure 1-3) étudiés au sein de l’équipe Conception en Structures [ 37] du Laboratoire de Mécanique et Génie Civil de Montpellier, ont conduit à la nécessité de se doter d’un environnement de suivi de contrôle efficace et rapide.
12/142 1 - Introduction générale
Figure 1-3 Systèmes constructifs innovants dits de « tenségrité »
Ce besoin est motivé d’une part, par la nature « fragile »1 de ce type de structure précontrainte qui impose une connaissance et un suivi fiable de son évolution dynamique et physique (état des rigidités, répartition des masses en particulier).
D’autre part, ces mêmes structures disposent intrinsèquement - de part les utilisations possibles - de fortes potentialités de changements répétés de formes, de géométrie (processus de pliage dépliage d’une nappe - ex Figure 1-4) et de caractéristiques physiques (systèmes hybrides composés en sus d’une toile : modification des masses). En conséquence, les importantes modifications du comportement mécanique - variation de masse, de rigidité et d’amortissement - qui en résultent nécessitent de fait des méthodes d’identification permettant une mise à jour rapide des modèles.
1 Rupture d’un élément constitutif (perte brutale de la tension d’un câble par exemple) ou d’une liaison.
Lignes directrices et plan de l’étude - 1.3 13/142
Figure 1-4 Structure nappe composée de systèmes élémentaires barres - câbles
C’est pourquoi, l’environnement théorique offert par les méthodes espace état en général (réalisation directe d’un modèle expérimental, identification des caractéristiques physiques) et les capacités très élevées des récentes méthodes sous espace en particulier s’avèrent être particulièrement adaptés et ont été naturellement retenus pour répondre aux problèmes spécifiques des structures « spatiales » étudiées au sein de l’équipe.
Fort de ces orientations, l’objectif premier du travail faisant l’objet de ce manuscrit a été de développer plus avant et d’évaluer les possibilités d’identification des caractéristiques mécaniques (masses, raideurs et amortissements), celles-ci s’avérant être un point particulièrement intéressant pour des structures de type réticulées (systèmes discrets par excellence composés simplement d'éléments filiformes et de nœuds massifs).
Au cours de cette étude, l’analyse des conditions pratiques d’identification a permis de proposer un élargissement de cette méthode dans le cas d’un nombre d’entrées de mesure réduit.
Dans un deuxième temps, une série de développements théoriques et méthodologiques originaux a été proposée suite au souci de mettre à disposition de l’expérimentateur un ensemble théorique complet et cohérent afin de mener à terme l’identification des matrices physiques quelles que soient les conditions expérimentales en terme de nombres d’entrées et de sorties disponibles.
Ces méthodes permettent de ré associer plusieurs modèles espace état partiels issus de plusieurs identifications d’une même structure pour n’en constituer au final qu’un seul élargi à l’ensemble des informations contenues dans les deux représentations partielles.
Cette deuxième démarche a pour origine le fait que la théorie sous-jacente de l’identification des paramètres physiques impose un certain nombre de conditions relativement contraignantes souvent non vérifiées lors d’une procédure expérimentale. En particulier, il est nécessaire de disposer d’un modèle espace état suffisamment dense en nombre de sorties. En outre, ce nombre de sorties doit être équivalent au nombre de modes identifiés.
14/142 1 - Introduction générale
Finalisant ce second aspect du travail, trois procédures complémentaires, ré associant deux représentations d’états partielles, sont donc proposés2 et permettent ainsi :
◊ de bénéficier de campagnes de mesures successives en différents endroits de la structure en permettant la reconstitution d’un modèle espace état élargi,
◊ la mise en œuvre d’un suivi de contrôle léger et progressif : mise à jour à intervalle de temps régulier d’une partie du modèle espace état d’une structure (structures variables dans le temps, application à la détection et à la localisation d’endommagements localisés),
◊ d’envisager une approche analogue à la sous structuration pour les structures en place par exploitation directe des données expérimentales.
En définitive, l’ensemble du travail s’est attaché à évaluer la pertinence de l’utilisation et les problèmes subséquents de la mise en œuvre des méthodes d’identification dynamiques temporelles dans l’espace état sur les structures spatiales.
En association avec divers algorithmes sous-espace, les capacités intrinsèques de cette phase de l’identification ont donc été évaluées.
Le plan de ce manuscrit est le suivant :
◊ Deux chapitres sont consacrés aux éléments théoriques constitutifs de cette thèse.
• Dans un premier chapitre (chap. 2), une fois rappelée la théorie générale propre aux représentations espace état appliquée aux structures mécaniques, sont présentés les aspects théoriques finalisant le processus d’identification des matrices physiques (problème inverse).
• Sont proposées également et détaillées trois méthodes visant à ré associer des représentations partielles deux à deux.
• Quant au second chapitre théorique (chap. 3), il traite plus spécifiquement des concepts généraux des méthodes sous-espace dans l’espace état et développe en détail les deux algorithmes d’identification temporelle sous-espace retenus dans le cadre de cette étude. Il s’agit des algorithmes Moesp et N4sid robuste (N4sidr).
◊ Vient ensuite un chapitre (chap. 4) consacré aux validations numériques. L’ensemble des méthodes et stratégies originales qui ont été proposées au cours des chapitres précédents sont validées sur un exemple de structure simple à 4 degrés de liberté (type poutre cantilever). Toutes exploitent le processus d’identification des deux algorithmes sous-espace Moesp et N4sidr.
◊ Enfin dans un dernier chapitre (chap. 5), sont présentés et analysés l’ensemble des résultats expérimentaux effectués au sein du Laboratoire de Mécanique et Génie Civil et se rapportant aux méthodes et algorithmes introduits au cours de cet ouvrage.
2 … et dépassent même en partie le cadre de ce pourquoi elles ont été initialement envisagées.
Lignes directrices et plan de l’étude - 1.3 15/142
◊ En conclusion (chap. 6), un bilan synthétique des divers travaux entrepris tout au long de cet ouvrage est réalisé, les performances et faiblesses respectives des différentes options retenues comparées. Enfin, des perspectives de développements et de travaux futurs sont proposés.


17/142
2. Représentation d’état : théorie - applications
Ce chapitre rappelle dans un premier temps les éléments théoriques de base relatifs à la représentation d’état déterministe. Une fois présenté le transfert de la forme classique du principe fondamental de la statique en représentation espace état, sont énoncées les caractéristiques et propriétés fondamentales propres à ce mode de représentation.
Dans une deuxième section est abordée la reconstitution des matrices physiques précisément à partir de cette représentation d’état, modèle à part entière des systèmes mécaniques. Le théorème fondamental est énoncé puis les problèmes spécifiques à ce genre d’opération sont détaillés.
Dans la troisième section sont proposées trois méthodes de recombinaison complémentaires visant à ré associer deux à deux des modèles espace état partiels (ou sous représentations). Outre les énoncés de principe basés majoritairement sur les propriétés des modèles espace état, un diagramme schématique résume les différentes étapes des processus mis en jeu.
Enfin au cours de la quatrième et dernière section, sont envisagés les problèmes de réduction et de raffinement de modèles subséquents à un processus d’identification.
2.1. Représentation espace état déterministe Cette section détaille la forme classique et déterministe de la représentation d’état par opposition à la forme
déterministe - stochastique introduite avec les algorithmes sous-espace dans le chapitre suivant. Pour autant, les notions développées au cours de cette section visent à faciliter la compréhension des développements ultérieurs. Après une courte introduction à la modélisation des processus, les différentes formes - continue et discrète - de la représentation d’état déterministe sont détaillées sur l’exemple d’un système dynamique structurel. Est développée ensuite la manière dont s’extrait d’un modèle espace état l’ensemble des informations modales propres aux processus dynamiques. Enfin, les notions de représentations d’état similaires ainsi les concepts importants d’observabilité et de commandabilité sont traités en particulier.
2.1.1.Introduction - modélisation des processus L’évolution d’un processus quelconque à partir d’un instant initial donné ne dépend pas uniquement de
l’influence de son environnement, mais il dépend aussi de variables internes propres au système [ 7].
On regroupe mathématiquement l’ensemble de ces variables internes dans un vecteur x(t) nommé vecteur état. La connaissance complète de l’état initial interne est nécessaire pour assurer l’unicité ultérieure du comportement du processus au cours du temps. En quelque sorte, le vecteur état initial représente la mémoire minimale du passé du système. Le nombre de composantes de ce vecteur, choisi minimal mais suffisant, est l’ordre du système. Il représente le nombre maximum de variables indépendantes nécessaires pour modéliser complètement un système.

18/142 2 - Représentation d’état : théorie - applications
La représentation mathématique continue dans l’espace d’état des modèles déterministes linéaires et invariants dans le temps est donnée par les équations suivantes :
( ) ( ) ( )( ) ( ) ( )&x t A x t B u t
y t C x t D u tc c
c c
= += +
( 2-1)
où ( )u t m∈ℜ est le vecteur commande (variables d’entrées) et ( )y t l∈ℜ est le vecteur de sortie du
processus. Cette représentation est appelée représentation d’état. m et l sont respectivement le nombre des entrées et le nombre des sorties.
D’un point de vue de l’observateur, une représentation d’état telle que décrite par l’équation ( 2-1) peut être symbolisée par la figure suivante :
Entrées decommande u(t) Sorties y(t)
Système ou processus(Ac, Bc, Cc, Dc)
Génération des variablesd'état x(t)
x(0
)
Figure 2-1 Représentation d’état déterministe
Ac , Bc et Cc sont respectivement la matrice d'état, la matrice d'entrée et la matrice de sortie dans le temps
continu. Dc est une matrice dans le temps continu qui traduit l’influence directe des entrées sur les sorties.
Contrairement à u(t) et y(t) qui représentent les entrées physiquement contrôlées et les sorties physiquement mesurées du système, x(t) représente l’état de variables internes au système qui peuvent ne pas avoir de visualisation physique systématique.
Certaines de ces variables d’état sont dites observables, c’est à dire qu’elles sont susceptibles d’influencer les sorties. Sans pour autant qu’elles soient toujours aisément mesurables, elles traduisent malgré tout une composante physique du processus. En revanche, d’autres variables d’état sont présentées comme non observables en ce sens qu’elles n’agissent pas du tout (et ne sont donc perceptibles d’aucune manière) sur les sorties du processus.
De plus, on dira que les variables d’état sont commandables dans la mesure où l’on peut les faire passer d’un état initial arbitraire à un état final défini grâce à une construction adéquate de la commande u(t).
Les conclusions mathématiques de l’observabilité et de la commandabilité sont détaillées au § 2.1.7.
L’ensemble des travaux subséquents s’appuie entièrement sur cette représentation d’état linéaire et invariante dans le temps.
Par contre, les algorithmes sous espaces développés dans le cadre de ce travail exploitent plus particulièrement la représentation d’état déterministe stochastique, linéaire et invariante dans le temps qui est une extension de la représentation d’état de base présentée ci avant. Elle est développée ultérieurement lors de l’exposé détaillé de ces algorithmes.

Représentation espace état déterministe - 2.1 19/142
2.1.2.Application aux systèmes mécaniques
2.1.2.1.Equation classique de la dynamique
Un système dynamique structural, disposant initialement d'un nombre infini de degrés de liberté, peut être approché3 par la relation matricielle linéaire continue de degré n (n fini) suivante :
( ) ( ) ( ) ( )M y t Cy t Ky t u t&& &+ + = ( 2-2)
où M, C et K sont respectivement les matrices n n× des masses mi , amortissements cij et raideurs kij .
u(t) est le vecteur n × 1 (m=n) des entrées (vecteur force) et y(t) est le vecteur n × 1 (l=n) des sorties (vecteur déplacement).
2.1.2.2.Représentation d’état continue
L'équation ( 2-2) peut être représentée dans l’espace d’état en introduisant le vecteur état x(t). La formulation mathématique de cette représentation d'état dans le temps continu est donnée par les équations suivantes :
( ) ( ) ( )( ) ( ) ( )&x t A x t B u t
y t C x t D u tc c
c c
= += +
( 2-3)
où classiquement le vecteur état s’exprime comme suit :
( ) ( )( )x t
y t
y t=
&
( 2-4)
x(t) est de dimension 2 1n × .
Pour le vecteur état retenu à l’équation ( 2-4), le triplet matriciel Ac , Bc et Cc s'exprime en fonction des
paramètres physiques (matrices M, C et K) de la manière suivante :
( )
AI
M K M Ccn n n
n n
=− −
×− −
01 1
2 2,
( 2-5)
( )
BMc
n n
n n
=
×−
01
2 ,
( 2-6)
[ ]( )C Ic n n n n n= ×0
2, ( 2-7)
[ ]( )Dc n n= 0
, ( 2-8)
A noter que Dc reste nulle dans le cadre d'une modélisation dynamique classique (cf. équation ( 2-2)).
3 Les réponses de degré très élevé sont négligées.

20/142 2 - Représentation d’état : théorie - applications
2.1.3.Représentation d’état discrète
Avertissements
La suite des développements ne préjugeant aucunement sur le nombre d’entrées et sorties de la représentation espace état, les valeurs génériques m et l sont employées à chaque fois que cela est nécessaire. En revanche, l’application aux modèles mécaniques qui est faite des représentations espace état impose de conserver la parité de l’ordre mise en valeur dans l’équation ( 2-4). Aussi, la valeur de l’ordre est notée par la suite 2n.
Théorème
Soit le temps discret t k tk = ∆ avec ∆t la période d'échantillonnage telle que ∆t t tk k= −+1 avec l'entrée u(t)
supposée constante sur la période ∆t considérée. On obtient alors une représentation d'état discrète de la forme :
x Ax Bu
y Cx Duk k k
k k k
+ = += +
1 ( 2-9)
où les matrices A, B, C et D sont les matrices d'état discrètes telles que :
( )
A e
B e d B
C C
D D
A t
A tc
t
c
c
c
c
====
−∫
∆
∆∆ τ τ .0 ( 2-10)
Démonstration :
La solution continue de ( 2-3), à l'instant t et pour des conditions initiales à l'instant t0 , prend la forme
suivante :
( ) ( ) ( ) ( ) ( )x t e x t e B u dA t t A tct
tc c= +− −∫0
00
τ τ τ ( 2-11)
En effet, comme pour une équation différentielle classique, sa solution sans second membre s'écrit
( ) ( ) ( )x t e x tA t tc= − 00 d'où la réponse impulsionnelle à l'instant τ4 :
( ) ( ) ( )δ τ τ τt h t eA tc− → − = − ( 2-12)
Et du fait des propriétés supposées de linéarité et d'invariabilité (cf. page 18), on peut écrire, à partir
de ( 2-12), l'implication suivante ( ) ( ) ( ) ( )δ τ τt B u t e B u tcA t
cc− → − qui, intégrée de t à t0 , fournit la
solution avec second membre (deuxième partie de la solution ( 2-11)).
Ainsi, en posant t t k0 = et t t k= +1 ( ( )x t xk0 = et ( )x t xk= +1 ), on retrouve la formulation des
matrices d'état telle qu'exposée en ( 2-10).
Fin de démonstration
La Figure 2-2 schématise le processus discrétisé représenté par l’équation ( 2-9) :
4 δ est la fonction Dirac et h la fonction de Heavyside.

Représentation espace état déterministe - 2.1 21/142
B C
A
D
∆+ +uk yk
xk+1 xk
Figure 2-2 Système déterministe linéaire et invariant5
Les routines numériques, issues de ( 2-10), utilisées afin de calculer la représentation discrète à partir de la représentation continue ou inversement sont classiques et déjà implantées dans des logiciels tels que Matlab®.
La nette similitude apparue entre la forme continue et discrète de la représentation d’état est un des atouts de l’utilisation de cette notion d’état. En effet, la grande majorité des opérations algébriques sont en général analogues quel que soit le « temps » (continu ou discret) dans lequel elles sont effectuées.
2.1.4.Représentations d’état similaires L’écriture du vecteur état x(t), représentative de l’évolution du système, est fonction du repère. Il existe donc,
pour un système donné, une infinité de représentations d’état différentes mais malgré tout mathématiquement similaires. En conséquence, il existe toujours une matrice T non singulière, de dimension 2 2n n× , qui permet de passer d’un modèle similaire à l’autre tel que :
( ) ( ) ( )( ) ( ) ( )&x t TA T x t TB u t
y t C T x t D u tc c
c c
= += +
−
−
1
1 ( 2-13)
La représentation de l'état du système - en l’occurrence ses matrices et son vecteur état - a changé de base dans l'espace d’état, mais en revanche, les entrées u(t) et les sorties y(t) n'ont pas été modifiées.
2.1.5.Une représentation similaire particulière : la forme modale
La décomposition spectrale de Ac fournit la matrice diagonale Ac_mod telle que :
A V A Vc c
n
_ mod
.
.= =
−1
1
2
0
0
λ
λ
( 2-14)
où V est la matrice des vecteurs modaux.
Notons que la forme modale de la matrice d’état discrète Amod prend une forme équivalente. En effet,
puisque A V AV V e VA tcmod = =− −1 1 ∆ , on en déduit rapidement :
A e
e
e
A t
t
t
c
n
mod_mod
.
.= =
∆
∆
∆
λ
λ
1
2
0
0
( 2-15)
En posant x V xmod = −1 dans ( 2-3), on accède à la totalité de la représentation modale :
5 ∆ est un opérateur délai.

22/142 2 - Représentation d’état : théorie - applications
A V A V
B V B
C C V
D D
c c
c c
c c
c c
_mod
_mod
_mod
_mod
====
−
−
1
1
( 2-16)
fournissant ainsi une représentation d’état similaire à ( 2-3) dans la base des modes normaux :
( ) ( ) ( )( ) ( ) ( )
&mod _mod mod _mod
_mod mod _mod
x t A x t B u t
y t C x t D u tc c
c c
= += +
( 2-17)
2.1.6.Fonctions de transfert et caractéristiques modales Considérons la transformation de Laplace6 de l’équation ( 2-3) pour des conditions initiales nulles (x(0)=0) :
( ) ( ) ( )( ) ( ) ( )
sx s A x s B u s
y s C x s D u sc c
c c
= += +
( 2-18)
en posant sx(s)=sIx(s) où I désigne la matrice identité, il vient :
( ) ( )( ) [ ]H s
y su s
C sI A B Dc c c c= = ⋅ − ⋅ +−1 ( 2-19)
H(s) est la matrice de transfert ; matrice symétrique des fonctions de transfert de dimension l m× .
H(s) peut s’exprimer en fonction de la représentation modale similaire ( 2-17) prenant ainsi une forme plus compacte :
( )( )
( )
H s C
s
s
B Dc
n
c c= ⋅
−
−
⋅ +
−
−
_ mod _ mod _mod.
.
λ
λ
11
21
0
0
( 2-20)
D’après la formulation théorique du système mécanique ( 2-2), Dc et conséquemment Dc_mod sont nuls (cf.
les équations ( 2-5) à ( 2-8)). Sous cette condition, chaque terme ( )h sij de H(s) s’exprime alors aisément sous la
forme :
( ) ( )h sc b
sij
ik kj
kk
k n
=×
−=
=
∑λ1
2
( 2-21)
On y reconnaît la forme semblable d’un système à un degré de liberté factorisé en pôles (dénominateurs) et résidus (numérateurs) telle que :
( )λ σ ω
ω ω εσ ε ω
k k dk
d k ok k
k k ok
i
avec
= ± + ×
= −= ×
1 2 ( 2-22)
où εk , ωd k et ωok sont respectivement le taux d’amortissement [%] la pulsation propre amortie et la
pulsation propre non amortie [rad/s] d’ordre k.
6 s j= ω .

Représentation espace état déterministe - 2.1 23/142
Les λk (au nombre de 2n) de la matrice d’état modale se présentent en paires de complexes conjugués
procurant ainsi les n valeurs propres et n vecteurs propres.
2.1.7.Observabilité et commandabilité
2.1.7.1.Position du problème
La représentation d'état d'un système peut être assimilée conceptuellement à une représentation interne par opposition à la représentation externe décrite par la matrice de transfert. En effet, cette dernière ne caractérise que le comportement entrées/sorties indépendamment de son modèle d’état qui n’est pas visualisé. En revanche, la représentation d'état prend en compte les conditions initiales du système (Figure 2-1) et rapporte à chaque instant l'état interne par l'intermédiaire du vecteur état x(t).
Cette information supplémentaire apportée par le concept de la représentation d’état doit, pour être complète, remplir un certain nombre de conditions, car il se peut que l’une des composantes (ou mode) du vecteur état ne soit pas influencée par le signal d’entrée et/ou n’influence pas les sorties. Il s’agit dans le premier cas d’un mode non commandable, dans l’autre cas d’un mode non observable.
Ces notions d’observabilité et de commandabilité sont très importantes dans le résultat d’une identification ou dans une réduction subséquente de l’ordre dans la mesure où elles conditionnent en partie la stabilité (cf. section 2.1.7.4) et la distinction des pôles.
Cette problématique peut se résumer en deux questions :
1) Existe-t-il une commande susceptible de faire passer le processus d’un état quelconque défini ( )x t1 à un
autre état quelconque défini ( )x t2 ?
2) Connaissant le signal d’entrée, peut-on, par la seule observation des sorties sur un intervalle de temps donné, déduire l’état initial du système ?
2.1.7.2.Commandabilité
On définit la matrice de commandabilité ( )CA ,Bc c
:
( ) [ ]( )C A ,B c c c c c c
nc n nmc c
B A B A B A B= −1 2 2 1
2 2.
, ( 2-23)
Théorème :
Un système dynamique linéaire de degré n est complètement commandable si et seulement si le rang de la matrice ( )C
A ,Bc c est maximum et de rang 2n.
2.1.7.3.Observabilité
On définit la matrice d’observabilité ( )OA ,Cc c
:
( )( ) ( ) ( )
( )OA C
TcT
c
T
cT
c
T
cT
cn T
cT
n nlc c
C A C A C A C,,
.=
−1 2 2 1
2 2
( 2-24)
Théorème :
Un système dynamique linéaire de degré n est complètement observable si et seulement si le rang de la matrice ( )O
A ,Cc c est maximum et de rang 2n.
24/142 2 - Représentation d’état : théorie - applications
2.1.7.4.Stabilité et détectabilité
En sus des notions de commandabilité et d’observabilité traitées ci avant, reste la distinction entre comportements stable et instable des modes.
Ainsi :
◊ un mode instable et non commandable peut faire diverger ses sorties correspondantes sans possibilité de contrôle par retour d’état. Au mieux, seul peut être toléré dans ce cas là une instabilité transitoire avec retour asymptotique à la stabilité ; le régime permanent n’est alors pas affecté.
◊ un mode instable et non observable est encore plus problématique du fait de l’impossibilité à le détecter au niveau des sorties.
Le problème de l’instabilité se pose donc dès lors que l’on a affaire à des modes non commandables ou non observables puisque, d’une manière ou d’une autre, toute tentative de contrôle de ses sorties par un retour d’état est caduque.
Dans le cas d’une commandabilité ou d’une observabilité partielle, deux propriétés supplémentaires sont à prendre en compte :
◊ la stabilité : la paire ( )A Bc c, est stabilisable si et seulement si tous ses modes non commandables sont
asymptotiquement stables.
◊ la détectabilité : la paire ( )A Cc c, est détectable si et seulement si tous ses modes non observables sont
asymptotiquement stables.
Pour de plus amples détails sur le théorème subséquent, voir [ 7].
2.2. Reconstitution des matrices physiques Cette section développe les aspects théoriques de la reconstitution des matrices physiques M, C et K à partir
d’une représentation d’état du système dynamique étudié. L’obtention de la représentation d’état unique à interprétation physique est la clé du processus.
Lors de la phase d'identification d’un système dynamique structural, les algorithmes ne fournissent seulement qu’une représentation d’état à une transformation de similitude près. Aussi, la représentation d’état obtenue (ou
identifiée7) Acid , Bc
id , Ccid et Dc
id ne présente plus, de fait, les caractéristiques adéquates pour reconstituer les
matrices physiques M, C et K par exploitation des équations ( 2-5) à ( 2-7) précédemment établies.
On montre [ 50] qu'il existe une transformation de similitude P unique qui permet de convertir toute représentation d'état d'un système dynamique linéaire et invariant dans le temps en une représentation d'état physiquement interprétable.
2.2.1.Théorème
Il existe une transformation de similitude P unique qui satisfait :
7
id pour identifiée.

Reconstitution des matrices physiques - 2.2 25/142
A PA P
B PB
C C P
D D
c cid
c cid
c cid
c cid
====
−
−
1
1 ( 2-25)
avec
( )
PC
C Acid
cid
cid
n n
=
2 2,
( 2-26)
A noter que P, afin d’être inversible, doit être carrée. Cela impose impérativement de disposer d’autant de sorties de mesures l que de nombre de modes n (l=n ).
2.2.2.Reconstitution de M, C et K Par la suite, l=n : le nombre de sorties est égal au nombre de modes.
2.2.2.1.Premier cas : le nombre d’entrées est égal au nombre de modes identifiés
Lorsque m=n (nombre d’entrées égal au nombre de modes), les matrices de masses, raideurs et amortissements sont obtenues simplement [ 50] comme suit :
[ ]M C A Bcid
cid
cid=
−1 ( 2-27)
[ ]K C M C AC
C Acid
cid c
id
cid
cid
= − ⋅ ⋅
−2
1
( 2-28)
2.2.2.2.Deuxième cas : le nombre d’entrées est inférieur au nombre de modes identifiés
Lorsque m<n (nombre d’entrées inférieur au nombre de modes), il n’est plus possible d’utiliser les équations
( 2-27) et ( 2-28) pour calculer M, C et K. En effet, Bcid étant de dimension 2n m× , le calcul de M (équation ( 2-
27)) n’est plus possible.
Lorsque la matrice M est diagonale et C et K symétriques, une des solutions [ 1] consiste alors à exploiter la structure de la matrice Ac à interprétation physique issue de l’équation ( 2-25) à la condition de connaître au
moins un des termes diagonaux de M.
Ce ou ces termes mi peuvent être issus d’une connaissance a priori du système physique (masses aux nœuds
structuraux par exemple), mais on montre dans cet ouvrage que ces masses peuvent aussi être identifiées par l’intermédiaire de la matrice physique Bc .
En effet, l’équation ( 2-25) donne toujours l’accès à la matrice Bc . Or la forme de cette dernière n’est que la
représentation partielle de la version complète ; les colonnes dont les entrées correspondantes ne figurent pas dans le vecteur u n’apparaissent pas. La Figure 2-3 donne une idée de ce que peut être la structure de Bc lorsque
m<n dans le cas d’une matrice M diagonale.

26/142 2 - Représentation d’état : théorie - applications
( )
[ ]( )1
1
1
2
2m
m
B
n n n
c n m
.
.
,
,
⇒
Suppression de n-m colonnes
Figure 2-3 Visualisation de la structure de Bc lorsque m<n
Ainsi, grâce à Bc , ce sont exactement m masses élémentaires correspondant aux m entrées utilisées qui
peuvent être identifiées.
En revanche, l’obtention de ces paramètres est très sensible au biais initial de la matrice des entrées suite à la nécessaire inversion mathématique…
2.2.2.2.a.Connaissance d’un seul terme mi
Rappelons tout d’abord que la matrice Ac est de la forme ( )
AI
M K M Ccn n n
n n
=− −
×− −
01 1
2 2,
et que le terme
M K−1 se structure - dans le cas d’une matrice M diagonale et d’une matrice K (respectivement C) symétrique - comme suit :
( )
M K
km
km
km
km
km
km
km
km
km
n
n
n
n
n
n
nn
n n n
− =
1
11
1
12
1
1
1
21
2
22
2
2
2
1 2
.
.
. . . .
.,
( 2-29)
La connaissance du terme mi permet donc l’extraction de tous les termes kij ( j n= 1K ) de la ligne i. Et,
sachant K symétrique (k kij ji= ), on peut déduire les mj restants qui permettent de fait l’accès à la totalité de la
matrice K.
En conséquence, la connaissance de non plus seulement un terme mais de plusieurs termes mi permet le
calcul simultané de plusieurs lignes de la matrice K améliorant d’autant le résultat final.
Un raisonnement identique s’applique au termeM C−1 afin d’extraire C.
2.2.2.2.b.Connaissance de tous les termes de M
Lorsque tous les termes mi sont connus, le calcul de K et C est effectué directement ligne par ligne en
exploitant chacun des termes de M.
2.2.2.3.Récapitulatif schématique
La Figure 2-4 suivante reprend l’ensemble des processus logiques détaillés dans cette section.
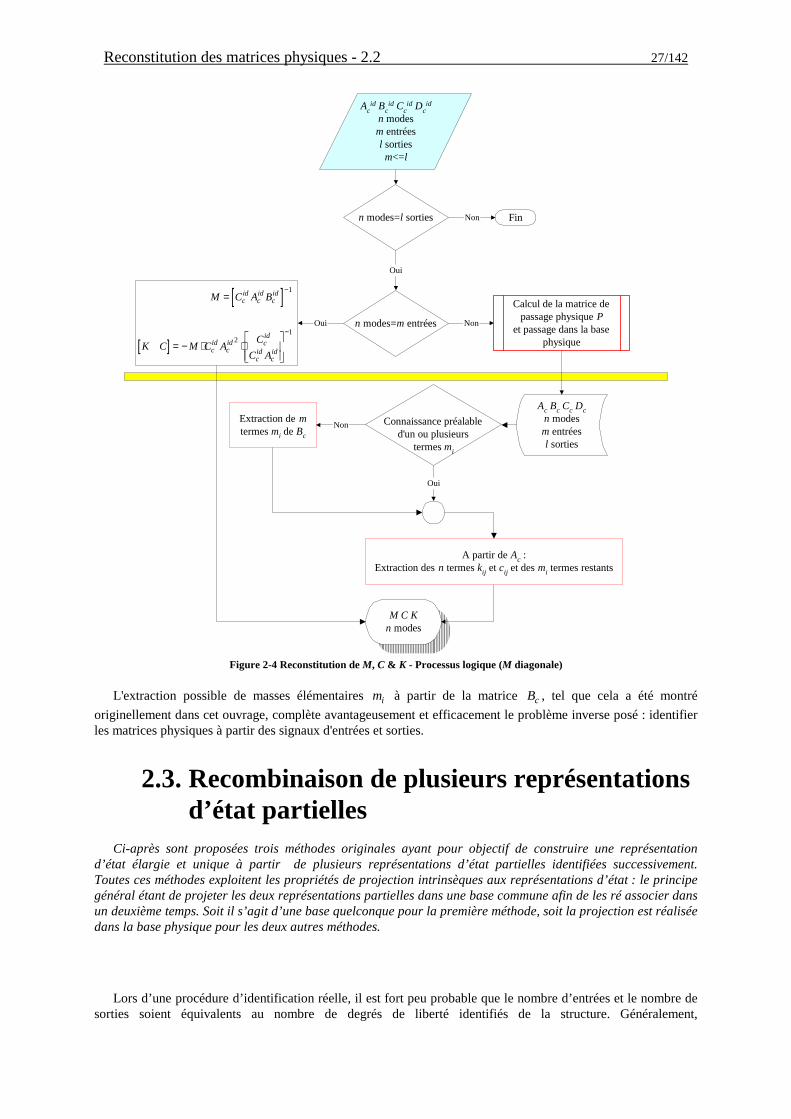
Reconstitution des matrices physiques - 2.2 27/142
Acid Bc
id Ccid Dc
id
n modesm entréesl sortiesm<=l
M C Kn modes
n modes=l sorties Non Fin
Oui
n modes=m entréesOui
[ ]M C A Bcid
cid
cid=
−1
[ ]K C M C AC
C Acid
cid c
id
cid
cid
= − ⋅ ⋅
−2
1Non
Extraction de mtermes mi de Bc
Ac Bc Cc Dcn modesm entréesl sorties
Calcul de la matrice depassage physique P
et passage dans la basephysique
Connaissance préalabled'un ou plusieurs
termes mi
Non
Oui
A partir de Ac :Extraction des n termes kij et cij et des mi termes restants
Figure 2-4 Reconstitution de M, C & K - Processus logique (M diagonale)
L'extraction possible de masses élémentaires mi à partir de la matrice Bc , tel que cela a été montré
originellement dans cet ouvrage, complète avantageusement et efficacement le problème inverse posé : identifier les matrices physiques à partir des signaux d'entrées et sorties.
2.3. Recombinaison de plusieurs représentations d’état partielles
Ci-après sont proposées trois méthodes originales ayant pour objectif de construire une représentation d’état élargie et unique à partir de plusieurs représentations d’état partielles identifiées successivement. Toutes ces méthodes exploitent les propriétés de projection intrinsèques aux représentations d’état : le principe général étant de projeter les deux représentations partielles dans une base commune afin de les ré associer dans un deuxième temps. Soit il s’agit d’une base quelconque pour la première méthode, soit la projection est réalisée dans la base physique pour les deux autres méthodes.
Lors d’une procédure d’identification réelle, il est fort peu probable que le nombre d’entrées et le nombre de sorties soient équivalents au nombre de degrés de liberté identifiés de la structure. Généralement,
28/142 2 - Représentation d’état : théorie - applications
l’expérimentateur utilise m points d’entrées et l points de sorties différents et souvent inférieurs à n. Même si, en théorie, cela n'influe pas directement sur l'identification des caractéristiques modales, à savoir les fréquences propres, taux d'amortissement et vecteurs propres, l’expérimentateur peut désirer un modèle plus complet mettant en œuvre un plus grand nombre de sorties par exemple.
Même problème si l’identification des matrices physiques est requise : en l'occurrence le nombre de sorties doit être équivalent au nombre n de modes identifiés lui même équivalent au nombre de nœuds que l'on s'est fixé pour discrétiser la structure.
Dans tous ces cas, une nouvelle campagne de mesures est nécessaire. Pour autant, l'identification précédemment réalisée contient un nombre non négligeable d’informations qui peuvent être conservées et qu’il serait regrettable de devoir identifier à nouveau8.
Le problème se pose donc ainsi : est-il possible de combiner plusieurs représentations d’état partielles pour n’en former plus qu’une seule prenant en compte toute l’information disponible ?
C'est pour répondre à ce problème que plusieurs méthodes sont présentées et développées.
Les trois méthodes proposées rassemblent et compilent l’information contenue dans chacun des modèles espace état réduit pour ne former plus qu’un seul modèle plus vaste disposant de toutes les entrées et sorties de chacune des représentations partielles. Elles exploitent principalement les propriétés de linéarité sous-jacentes aux représentations espace état des processus et les transferts de base.
2.3.1.Méthode n°1 : usage d’une base commune quelconque
2.3.1.1.Principe
Soit A1, B1 , C1 , D1 d’une part et A2 , B2 , C2 , D2 d’autre part qui identifient le même système physique
mais utilisant des points d’entrées et de sorties partiellement différents en nombre et en position.
Si ces deux représentations d’état totalement commandables et observables identifient les mêmes modes (en nombre et en valeur) et disposent de plus d’un minimum de points d’entrées et sorties communes (une entrée et une sortie au minimum !), alors les représentations d’état tronquées à ces entrées et sorties communes sont similaires.
Il est donc possible de projeter les deux représentations d’état complètes dans une base qui leur est commune. Une représentation d’état étendue prenant en compte les informations contenues dans les deux représentations identifiées se construit aisément par combinaison linéaire.
La Figure 2-5 illustre le processus. Dans un souci de simplification, la base commune est la base de la représentation d’état n°1 mais celle-ci peut être quelconque.
8 Le problème est d’autant plus crucial que le matériel disponible est limité.
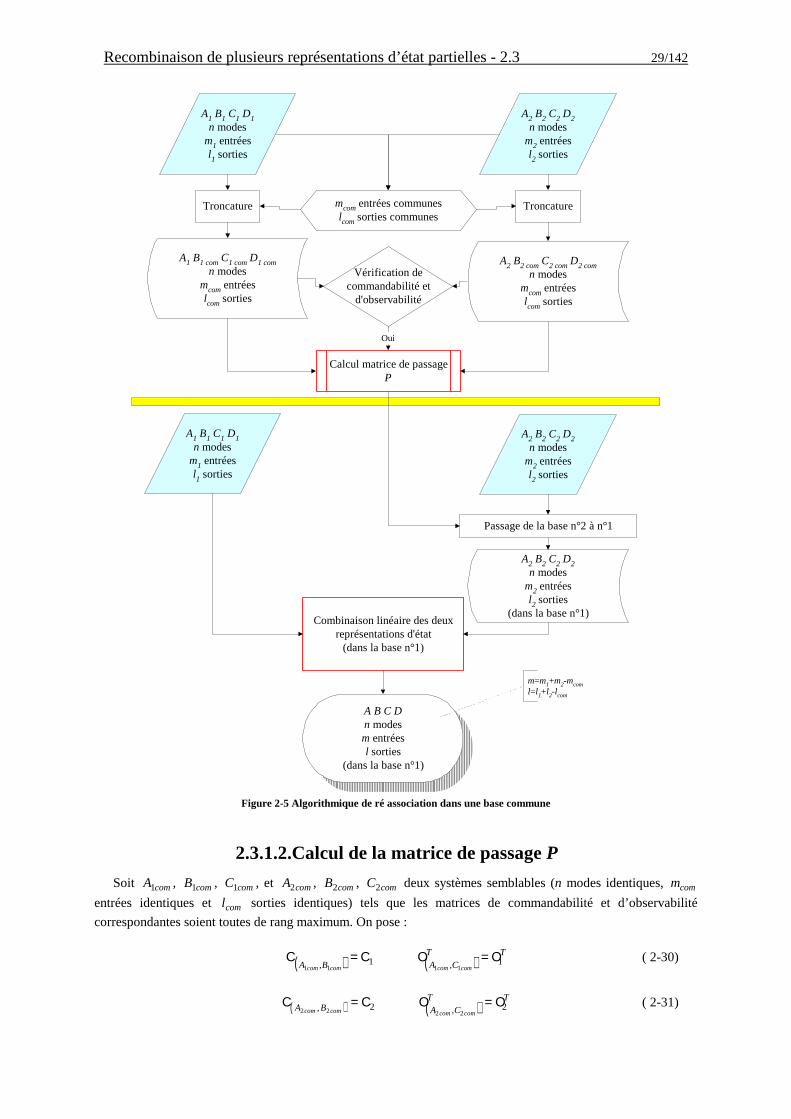
Recombinaison de plusieurs représentations d’état partielles - 2.3 29/142
A1 B1 C1 D1n modes
m1 entréesl1 sorties
A2 B2 C2 D2n modes
m2 entréesl2 sorties
mcom entrées communeslcom sorties communes
Troncature
A1 B1 com C1 com D1 comn modes
mcom entréeslcom sorties
A2 B2 com C2 com D2 comn modes
mcom entréeslcom sorties
Troncature
Calcul matrice de passageP
Vérification decommandabilité et
d'observabilité
Oui
Passage de la base n°2 à n°1
Combinaison linéaire des deuxreprésentations d'état
(dans la base n°1)
A2 B2 C2 D2n modes
m2 entréesl2 sorties
(dans la base n°1)
A B C Dn modesm entréesl sorties
(dans la base n°1)
m=m1+m2-mcoml=l1+l2-lcom
A1 B1 C1 D1n modes
m1 entréesl1 sorties
A2 B2 C2 D2n modes
m2 entréesl2 sorties
Figure 2-5 Algorithmique de ré association dans une base commune
2.3.1.2.Calcul de la matrice de passage P
Soit A com1 , B com1 , C com1 , et A com2 , B com2 , C com2 deux systèmes semblables (n modes identiques, mcom
entrées identiques et lcom sorties identiques) tels que les matrices de commandabilité et d’observabilité
correspondantes soient toutes de rang maximum. On pose :
( )C CA Bcom com1 1
1,= ( )O O
A CT T
com com1 11,
= ( 2-30)
( )C CA Bcom com2 2 2, = ( )O OA C
T T
com com2 22,
= ( 2-31)

30/142 2 - Représentation d’état : théorie - applications
avec C et O respectivement de dimension 2 2n nmcom× et 2 2nl ncom × .
Alors, la matrice de changement de base P et son inverse P−1 telles que :
A PA Pcom com1 21= − B PBcom com1 2= C C Pcom com1 2
1= − ( 2-32)
sont données par :
[ ]P T T= ⋅−
C C C C1 2 2 2
1 ( 2-33)
[ ]P T T− −= ⋅1
2 2
1
2 1O O O O ( 2-34)
La démonstration [ 21] repose sur le fait que O C OC2 2 1 1= .
2.3.1.3.Combinaison linéaire des deux représentations d’état dans la même base
Lorsque les deux représentations d’état du même système ont été transférées dans la même base, il n’y a pas de problème particulier pour les associer. Ce n’est ni plus ni moins qu’une représentation matricielle d’un ensemble d’équations linéaires.
Cette première méthode de ré association dans une base commune est adéquate pour augmenter le nombre d’entrées et le nombre de sorties de la structure considérée en combinant respectivement celles des deux représentations d’états identifiées partielles. La contrainte majeure à son usage est la nécessité de disposer de deux représentations d’état similaires (impliquant des modes identifiés identiques).
Cette méthode s’avère ainsi très pratique pour densifier un modèle espace état partiel sans recommencer une campagne de mesures générale.
Ce dernier cas se présente en particulier lorsque les matrices physiques ont besoin d’être identifiées ; la condition première pour « remonter » aux caractéristiques physiques étant de disposer d’un nombre de sorties l égal au nombre de modes identifiés n (cf. section 2.2.2). L’application autant de fois que nécessaire de cette méthode aux couples d’identifications partielles de plusieurs campagnes de mesures successives en différents points de la même structure donne accès à une représentation d’état respectant au final l=n.
2.3.2.Méthode n°2 : usage de la base à interprétation physique
2.3.2.1.Principe
Soit A1, B1 , C1 , D1 d’une part et A2 , B2 , C2 , D2 d’autre part qui :
◊ identifient le même système physique,
◊ peuvent être converties en représentations physiquement interprétables (condition : l=n pour chacune des représentations).
Si ces deux représentations d’état totalement commandables et observables identifient les mêmes modes9 (en nombre et en valeur), alors ces deux représentations d’état sont similaires.
9 De fait, cette condition implique que les sorties sont identiques (en nombre et en position) aux deux représentations
partielles.
Recombinaison de plusieurs représentations d’état partielles - 2.3 31/142
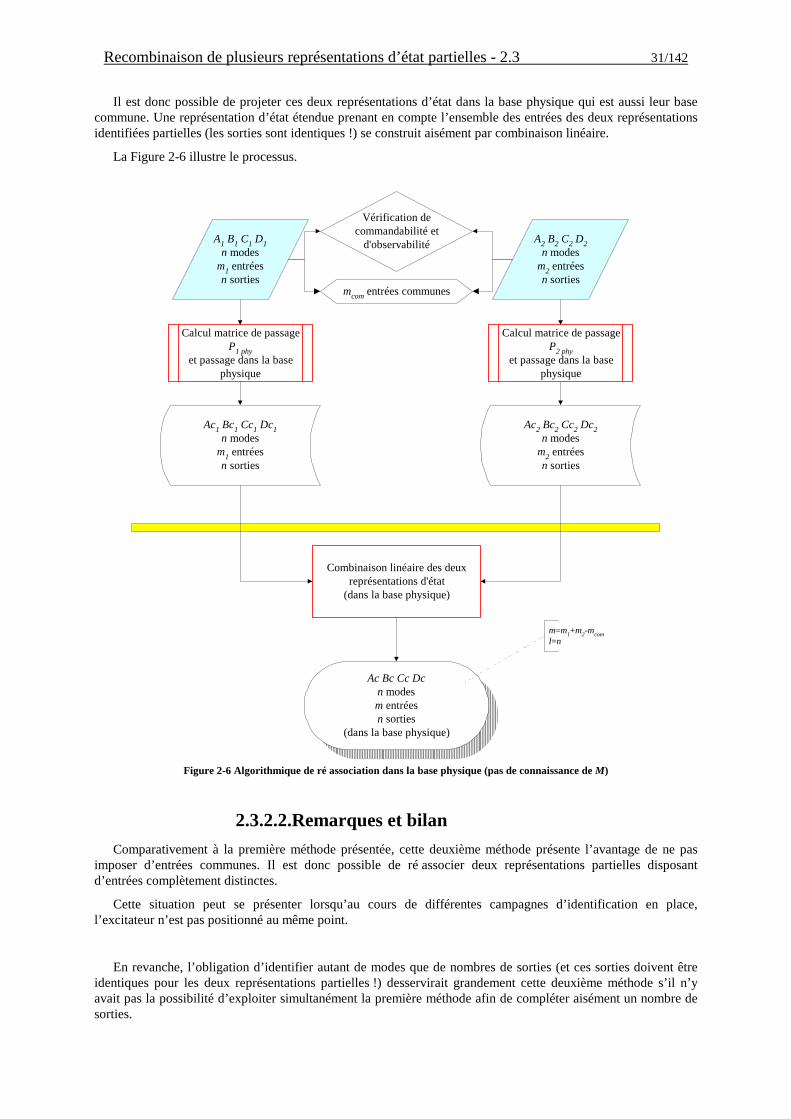
Il est donc possible de projeter ces deux représentations d’état dans la base physique qui est aussi leur base commune. Une représentation d’état étendue prenant en compte l’ensemble des entrées des deux représentations identifiées partielles (les sorties sont identiques !) se construit aisément par combinaison linéaire.
La Figure 2-6 illustre le processus.
A1 B1 C1 D1n modes
m1 entréesn sorties
A2 B2 C2 D2n modes
m2 entréesn sorties
Ac1 Bc1 Cc1 Dc1n modes
m1 entréesn sorties
Ac2 Bc2 Cc2 Dc2n modes
m2 entréesn sorties
Combinaison linéaire des deuxreprésentations d'état
(dans la base physique)
Ac Bc Cc Dcn modesm entréesn sorties
(dans la base physique)
m=m1+m2-mcoml=n
Calcul matrice de passageP1 phy
et passage dans la basephysique
Calcul matrice de passageP2 phy
et passage dans la basephysique
Vérification decommandabilité et
d'observabilité
mcom entrées communes
Figure 2-6 Algorithmique de ré association dans la base physique (pas de connaissance de M)
2.3.2.2.Remarques et bilan
Comparativement à la première méthode présentée, cette deuxième méthode présente l’avantage de ne pas imposer d’entrées communes. Il est donc possible de ré associer deux représentations partielles disposant d’entrées complètement distinctes.
Cette situation peut se présenter lorsqu’au cours de différentes campagnes d’identification en place, l’excitateur n’est pas positionné au même point.
En revanche, l’obligation d’identifier autant de modes que de nombres de sorties (et ces sorties doivent être identiques pour les deux représentations partielles !) desservirait grandement cette deuxième méthode s’il n’y avait pas la possibilité d’exploiter simultanément la première méthode afin de compléter aisément un nombre de sorties.

32/142 2 - Représentation d’état : théorie - applications
2.3.3.Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M
2.3.3.1.Principe
Soit A1, B1 , C1 , D1 d’une part et A2 , B2 , C2 , D2 d’autre part qui :
◊ identifient tout ou partie du même système physique
◊ peuvent être converties en représentations physiquement interprétables (condition : l n1 1= et l n2 2= pour
chacune des représentations).
Soit enfin Γ le système relationnel de la structure précisant entre les n nœuds les p éléments dotés de caractéristiques comportementales de raideur et d’amortissement kk et ck (k=1…p).
Il est donc possible de projeter ces deux représentations d’état totalement commandables et observables dans leurs bases physiques respectives10.
La connaissance préalable du système relationnel Γ permet de sélectionner pour chacune des matrices d’état Ac1 et Ac 2 identifiées les vecteurs ligne restant valides dans la base physique générale. La ré association en une
matrice Ac globale étendue à l’ensemble des nœuds est alors possible.
Quant aux matrices Bc1 et Bc 2 , elles sont inexploitables en l’état. Mais la connaissance de M permet la
reconstitution de la matrice Bc globale puisque cette dernière est de la forme : BMc
n n=
×−
01 . En outre, une
connaissance seulement partielle de la matrice de masse peut suffire pour reconstituer totalement M si celle-ci est diagonale (cf. § 2.2).
Enfin en ce qui concerne la matrice Cc , aucune recombinaison n’est nécessaire ; elle est simplement de la
forme [ ]C Ic n n n= ×0 .
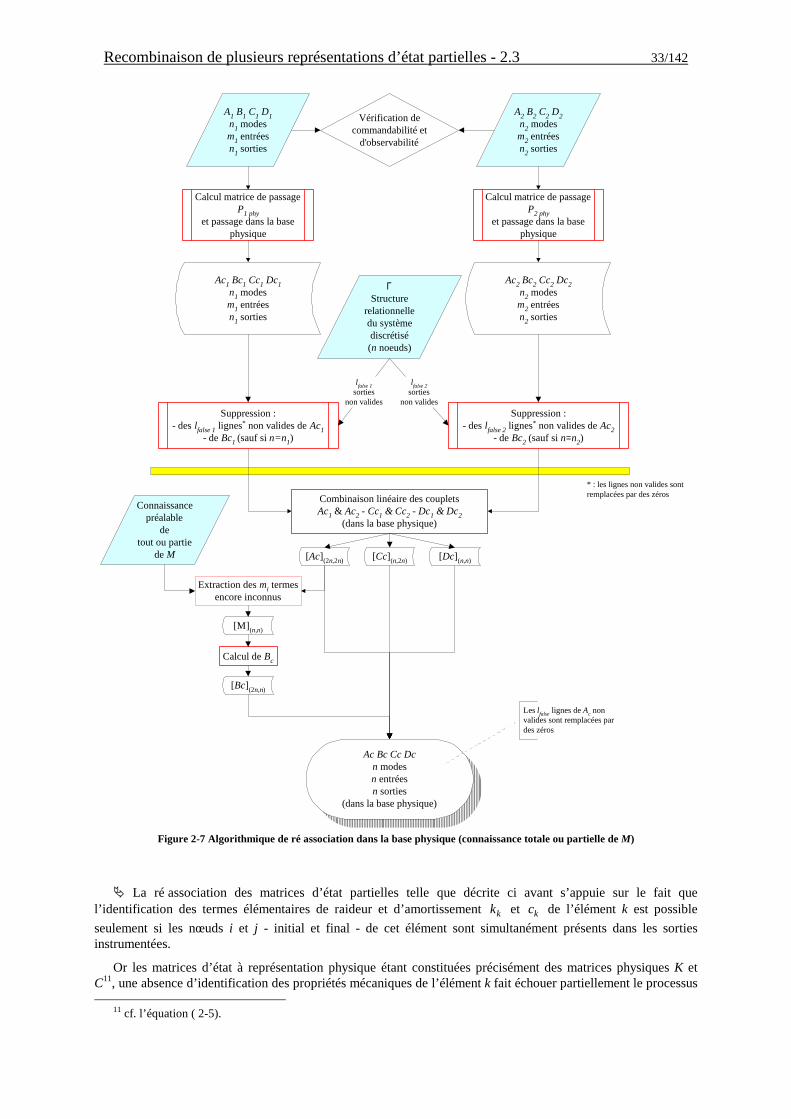
La Figure 2-7 résume le processus.
10 Etant donnée que seule une partie du système relationnel de la structure complète est prise en compte pour chacune de
ces projections (nombre de sorties limitées), les deux bases physiques obtenues ne sont que partiellement similaires et une recombinaison directe de ces deux représentations espace état n’est pas possible.
Recombinaison de plusieurs représentations d’état partielles - 2.3 33/142
A1 B1 C1 D1n1 modesm1 entréesn1 sorties
A2 B2 C2 D2n2 modesm2 entréesn2 sorties
Ac1 Bc1 Cc1 Dc1n1 modesm1 entréesn1 sorties
Ac2 Bc2 Cc2 Dc2n2 modesm2 entréesn2 sorties
Combinaison linéaire des coupletsAc1 & Ac2 - Cc1 & Cc2 - Dc1 & Dc2
(dans la base physique)
Ac Bc Cc Dcn modesn entréesn sorties
(dans la base physique)
Calcul matrice de passageP1 phy
et passage dans la basephysique
Calcul matrice de passageP2 phy
et passage dans la basephysique
Vérification decommandabilité et
d'observabilité
ΓStructure
relationnelledu systèmediscrétisé(n noeuds)
Suppression :- des lfalse 1 lignes* non valides de Ac1
- de Bc1 (sauf si n=n1)
Suppression :- des l false 2 lignes* non valides de Ac2
- de Bc2 (sauf si n=n2)
Extraction des mi termesencore inconnus
[Ac] (2n,2n)
Connaissancepréalable
detout ou partie
de M [Cc] (n,2n) [Dc] (n,n)
[Bc](2n,n)
[M] (n,n)
Calcul de Bc
l false 1sorties
non valides
lfalse 2sorties
non valides
* : les lignes non valides sontremplacées par des zéros
Les lfalse lignes de Ac nonvalides sont remplacées pardes zéros
Figure 2-7 Algorithmique de ré association dans la base physique (connaissance totale ou partielle de M)
� La ré association des matrices d’état partielles telle que décrite ci avant s’appuie sur le fait que l’identification des termes élémentaires de raideur et d’amortissement kk et ck de l’élément k est possible
seulement si les nœuds i et j - initial et final - de cet élément sont simultanément présents dans les sorties instrumentées.
Or les matrices d’état à représentation physique étant constituées précisément des matrices physiques K et C11, une absence d’identification des propriétés mécaniques de l’élément k fait échouer partiellement le processus
11 cf. l’équation ( 2-5).
34/142 2 - Représentation d’état : théorie - applications
de transfert des matrices d’état dans la base physique : il s’ensuit que la ligne contenant le terme non identifié n’a aucune validité et doit donc être invalidée (en la remplaçant par des zéros).
� En revanche, les matrices des entrées Bc1 et Bc 2 traduisant la répartition des masses sur la structure, les
nœuds non pris en compte dans l’identification vont répercuter l’influence de leur masse sur les autres masses. C’est pourquoi il n’est pas possible d’utiliser les matrices des entrées identifiées et qu’une connaissance même partielle des masses est nécessaire.
2.3.3.2.Remarques et bilan
A noter que cette troisième méthode de ré association dans l’espace à interprétation physique n’a pas d’exigence concernant la similitude des représentations d’état mises en jeu pourvu qu’elles permettent d’identifier en lieu et place tout ou partie d’une même structure.
Il est donc possible grâce à cette méthode de recomposer un modèle espace état global d’une structure complexe en exploitant successivement plusieurs représentations d’état identifiant chacune d’elle une partie de la dynamique de celle-ci. En d’autres termes, cette méthode reste complètement envisageable même lorsque les représentations d’état partielles ont identifié des modes différents ou partiellement différents.
Par exemple, une des représentations peut ne pas détecter un mode si les capteurs sont malencontreusement positionnés sur un nœud. Ou bien encore chacun des modèles espace état partiel « connaît », outre les modes généraux, des modes locaux peu visibles du reste de la structure.
Son emploi est donc beaucoup moins restrictif que les deux premières méthodes excepté l’obligation de devoir disposer impérativement d’autant de sorties que de modes (l=n) et d’une connaissance au moins partielle des masses. Mais, à nouveau, l’exploitation simultanée de la méthode n°1 permet de surmonter cet obstacle.
L’approche proposée ici est à rapprocher en partie des méthodes de sous structuration [ 38]. Ces dernières s’essayent à recomposer un modèle global à partir des sous modèles disponibles pour chacune des parties de la structure. Chacun de ces modèles partiels est totalement indépendant des conditions aux limites imposées par les autres parties de la structure prise dans sa globalité.
Par contre ici - et c’est là une différence fondamentale - l’identification se fait en place ; chaque représentation d’état partielle n’est pas strictement indépendante car elle porte toujours une part de la dynamique du reste du système.
Cette troisième méthode est donc particulièrement ambitieuse et permet d’envisager à terme, outre des possibilités de sous structuration en place, l’établissement de méthodologies de suivis et de contrôle de structures particulièrement intéressantes.
2.3.4.Conclusion Ce chapitre s’est employé à présenter trois méthodes visant à répondre au problème de la recombinaison des
représentations espace état partielles de tout ou partie d’une même structure.
Leurs capacités respectives à compiler les entrées et sorties de chacun des modèles espace état sont différentes et dépendent des bases théoriques exploitées pour les construire mais s’avèrent être fortement complémentaires.
C’est donc un ensemble complet et cohérent que propose ces trois méthodes afin de répondre initialement au problème pratique d’identification des matrices physiques mais s’avérant sans doute d’un intérêt plus vaste dans le cadre de l’identification générale pour l’extension de modèles ou de restructuration en place par exemple.
Réduction et raffinement des modèles - 2.4 35/142
2.4. Réduction et raffinement des modèles Cette section aborde succinctement les raisons et les principes attachés aux notions de réduction de l’ordre
ou de raffinement (augmentation du nombre de degrés de liberté) des modèles vis à vis de la démarche d’identification qui assure le lien entre la réalité du processus dynamique étudié et le modèle limité et partiel que l’on cherche à construire.
Dès lors qu’il s’agit de construire un modèle de toute pièce ou d’identifier les paramètres d’un modèle pré défini d’un système dynamique réel, se pose la problématique de l’ordre. En effet, lors du processus pratique d’identification, il est en réalité fort peu probable que le nombre de modes identifiés soit équivalent au nombre de modes du système attendu ou modélisé.
Soit d’une part nid le nombre de modes réellement identifiés et d’autre part n le nombre de modes du modèle théorique envisagé ou prédéterminé, trois éventualités sont susceptibles de se présenter :
1. L’ordre identifié 2nid est égal à l’ordre 2n. Les n équations différentielles définissant le modèle suffisent donc à décrire complètement la dynamique de la structure.
2. L’ordre identifié 2nid est supérieur à l’ordre 2n. Dans ce cas, soit l’identification a pris en compte un certain nombre de modes « fantômes » ou instables - modes sur-amortis, modes dus au bruit - qu’il faut alors supprimer12, soit l’ordre n est véritablement insuffisant pour décrire la réalité du système. Dans la dernière proposition, il est nécessaire d’envisager une discrétisation plus dense de la structure pour
augmenter le nombre n d’équations différentielles jusqu'à ce que n nid= . C’est donc un problème de raffinement de modèles.
3. L’ordre identifié 2nid est inférieur à l’ordre 2n. Enfin pour cette éventualité ci, soit la procédure expérimentale d’identification n’a pas perçu un certain nombre de modes (points de mesures positionnés en des nœuds fixes ou en nombre insuffisant, fréquence d’échantillonnage trop faible, excitation insuffisante, etc.) imposant une modification des procédures expérimentales, soit le nombre de degrés de liberté n est surabondant. Dans ce dernier cas et s’il s’agit d’un modèle théorique prédéterminé, une réduction de celui-ci doit être entreprise (par exemple [ 13] et [ 16]).
12 La suppression des modes inadaptés s’effectue aisément dans la base modale.

37/142
3. Identification sous-espace déterministe - stochastique
Ce chapitre présente, développe et approfondit la théorie propre à l’identification sous-espace déterministe stochastique.
Dans un premier temps (première section), le problème général est posé et les hypothèses fondamentales - permettant les développements ultérieurs - rappelées.
Les principaux outils, définitions et notations sont mis en place dans la deuxième section. En particulier, sont précisées les notions de sous-systèmes déterministe et stochastique, la séquence d’état, les matrices block Hankel et les projections orthogonales et obliques ; éléments fondamentaux à la base de l’identification sous-espace dans l’espace état.
Ce n’est que dans la troisième section que sont abordés les deux algorithmes objet et support de cette étude, les algorithmes N4sidr et Moesp. Tout d’abord, le théorème principal est énoncé ; celui-ci donne accès à la séquence d’état et à la matrice d’observabilité étendue à partir des données entrées sorties. Puis il est décliné pour les deux algorithmes de manière conceptuelle. Enfin, est fait cas de l’aspect « implémentation numérique » de cette première phase.
Toujours dans cette section, est exposée la deuxième phase de l’identification à proprement dite : l’obtention définitive de la représentation espace état. Un schéma de présentation similaire à l’énoncé du théorème principal est appliqué, à savoir : explicitation des procédures mathématiques pour N4sidr et Moesp, puis développement des particularités relatives à l’implémentation numérique.
3.1. Description du problème Soit le système déterministe - stochastique inconnu suivant :
x Ax Bu w
y Cx Du vk k k k
k k k k
+ = + += + +
1 ( 3-1)
où
◊ uk est le vecteur m× 1 de commande et yk le vecteur l × 1 de sortie. uk et yk sont directement
accessibles à la mesure.
◊ vkl∈ℜ est le bruit de mesure et wk
n∈ℜ2 le bruit inhérent engendré par le processus. vk et wk ne sont
pas mesurables. Tous deux sont supposés être des bruits blancs stationnaires de moyenne nulle (distribution gaussienne). Leurs matrices de covariance13 sont :
{ }Ew
vw v
Q S
S Rp
pqT
qT
T pq
⋅
=
⋅δ ( 3-2)
13 E est l’espérance mathématique et δ pq le symbole de Kronecker.
38/142 3 - Identification sous-espace déterministe - stochastique
avec Q de dimension 2 2n n× , S de dimension 2n l× et R de dimension l l× .
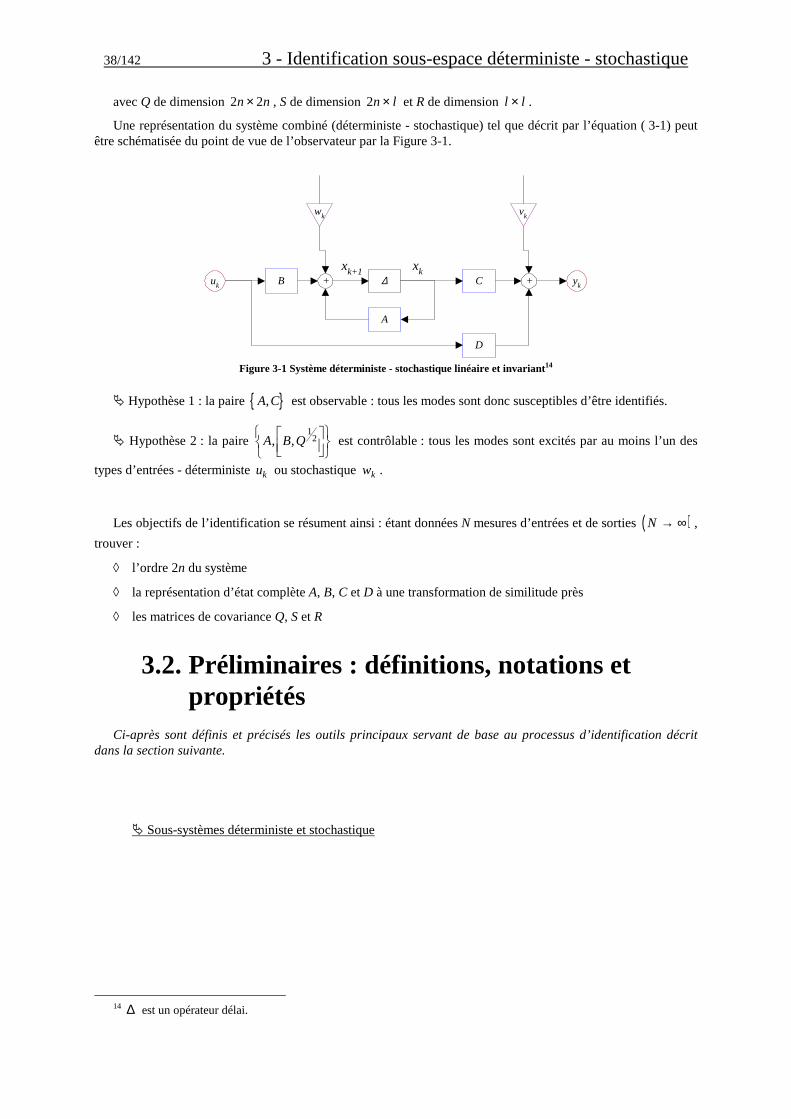
Une représentation du système combiné (déterministe - stochastique) tel que décrit par l’équation ( 3-1) peut être schématisée du point de vue de l’observateur par la Figure 3-1.
B C
A
D
∆+ +uk yk
xk+1 xk
wk vk
Figure 3-1 Système déterministe - stochastique linéaire et invariant14
� Hypothèse 1 : la paire { }A C, est observable : tous les modes sont donc susceptibles d’être identifiés.
� Hypothèse 2 : la paire A B Q, ,12
est contrôlable : tous les modes sont excités par au moins l’un des
types d’entrées - déterministe uk ou stochastique wk .
Les objectifs de l’identification se résument ainsi : étant données N mesures d’entrées et de sorties ( )N → ∞ ,
trouver :
◊ l’ordre 2n du système
◊ la représentation d’état complète A, B, C et D à une transformation de similitude près
◊ les matrices de covariance Q, S et R
14 ∆ est un opérateur délai.
3.2. Préliminaires : définitions, notations et propriétés
Ci-après sont définis et précisés les outils principaux servant de base au processus d’identification décrit dans la section suivante.
� Sous-systèmes déterministe et stochastique

Préliminaires : définitions, notations et propriétés - 3.2 39/142
Le système est décomposé en deux sous-systèmes - l’un déterministes et l’autre stochastiques15 - tels que :
x x x
y y yk k
dks
k kd
ks
= += +
( 3-3)
Il vient alors :
x Ax Bu
y Cx Dukd
kd
k
kd
kd
k
+ = += +
1 ( 3-4)
x Ax w
y Cx vks
ks
k
ks
ks
k
+ = += +
1 ( 3-5)
Remarques :
◊ Etant donnée que la paire A B Q, ,12
- représentative du système combiné - est supposé
contrôlable, il n’est plus nécessaire de disposer de la contrôlabilité sur la paire { }A B, et/ou sur la
paire A Q,12
- représentatives respectivement du sous-système déterministe seul et stochastique
seul.
◊ Dans le sous-système stochastique, les modes contrôlables de la paire A Q,12
sont supposés
stables du fait de la stationnarité supposée du processus stochastique [ 39].
◊ Les entrées uk , les états déterministes xkd et stochastiques xk
s et les sorties stochastiques yks sont
supposés quasi stationnaires [ 29].
� Matrices block Hankel
Les diverses matrices bloc Hankel des entrées sont déterminées comme suit :
15 signalés respectivement par les exposants d et s.
40/142 3 - Identification sous-espace déterministe - stochastique
( )
U
u u u
u u u
u u u
u u u
u u u
u u u
U
U
U
U
i
j
j
i i i j
i i i j
i i i j
i i i jmi j
i
i i
p
f
0 2 1
0 1 1
1 2
1 2
1 1
1 2
2 1 2 2 22
0 1
2 1
−
−
− + −
+ + −
+ + +
− + −
−
−
=
=
=
.
.
. . . .
.
.
.
. . . .
.,
ii
Entrées"passées"
Entrées"futures"
Sur une colonne donnée, aucunélément n'est en commun entre le"passé" et le "futur"
j
( )
=
=
=
−
− + −
+ + −
+ + +
− + −
+ −
+
−
u u u
u u u
u u u
u u u
u u u
u u u
U
U
U
U
j
j
i i i j
i i i j
i i i j
i i i jmi j
i
i i
p
f
0 1 1
1 2
1 2
1 1
1 2
2 1 2 2 22
0
12 1
.
.
. . . .
.
.
.
. . . .
.,
i +1
i -1
Entrées"passées"
Entrées"futures"
j
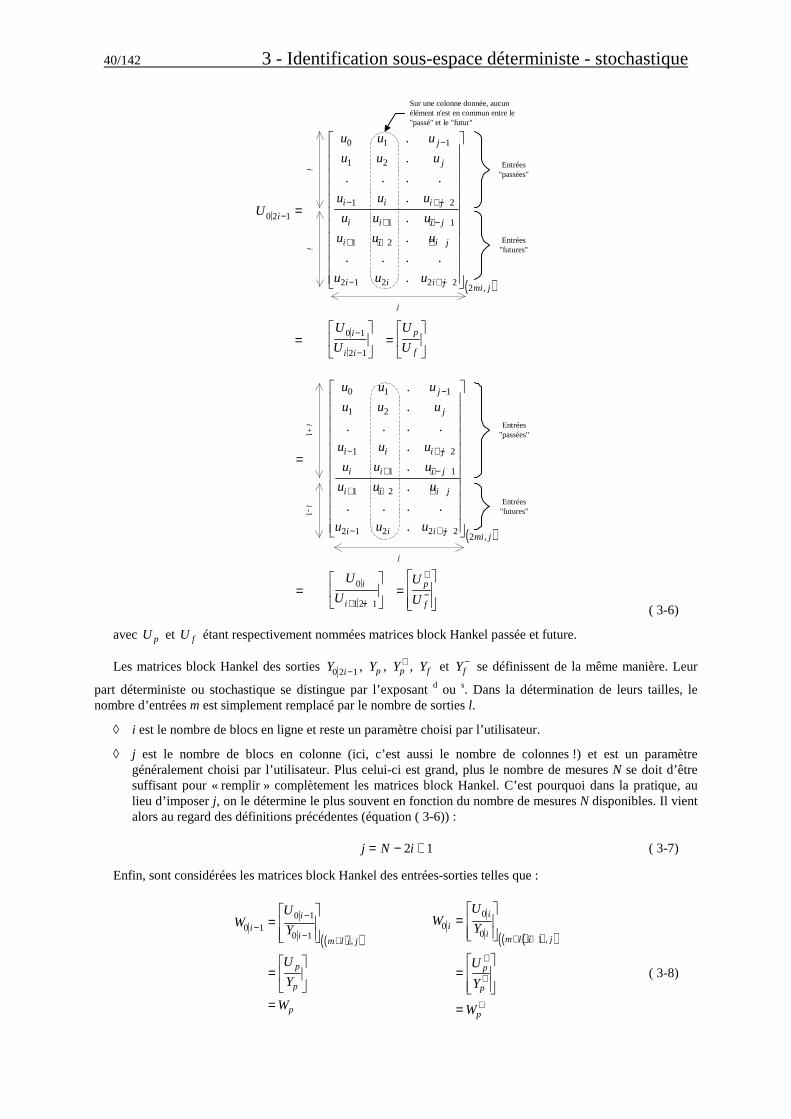
( 3-6)
avec U p et U f étant respectivement nommées matrices block Hankel passée et future.
Les matrices block Hankel des sorties Y i0 2 1− , Yp , Yp+ , Yf et Yf
− se définissent de la même manière. Leur
part déterministe ou stochastique se distingue par l’exposant d ou s. Dans la détermination de leurs tailles, le nombre d’entrées m est simplement remplacé par le nombre de sorties l.
◊ i est le nombre de blocs en ligne et reste un paramètre choisi par l’utilisateur.
◊ j est le nombre de blocs en colonne (ici, c’est aussi le nombre de colonnes !) et est un paramètre généralement choisi par l’utilisateur. Plus celui-ci est grand, plus le nombre de mesures N se doit d’être suffisant pour « remplir » complètement les matrices block Hankel. C’est pourquoi dans la pratique, au lieu d’imposer j, on le détermine le plus souvent en fonction du nombre de mesures N disponibles. Il vient alors au regard des définitions précédentes (équation ( 3-6)) :
j N i= − +2 1 ( 3-7)
Enfin, sont considérées les matrices block Hankel des entrées-sorties telles que :
( )( )W
U
Y
U
Y
W
ii
im l i j
p
p
p
0 10 1
0 1−
−
− +
=
=
=
,
( )( )( )W
U
Y
U
Y
W
ii
im l i j
p
p
p
00
01
=
=
=
+ +
+
+
+
,
( 3-8)

Préliminaires : définitions, notations et propriétés - 3.2 41/142
� Séquence d’état
Une séquence d’état se définit de la manière suivante :
[ ]( )X x x xi i i i j n j
= + + −1 1 2.
, ( 3-9)
De manière similaire aux matrices blocs Hankel - et en accord avec la décomposition en sous-systèmes - sont précisées les séquences d’état passée et future des sous-systèmes déterministes et stochastiques :
X X
X X
pd d
fd
id
=
=
0 X X
X X
ps s
fs
is
=
=
0 ( 3-10)
� Matrices d’observabilité et de contrôlabilité étendues
Est défini :
d’une part, la matrice d’observabilité étendue (i>2n) Γi telle que :
( )
Γi
ili n
C
CA
CA
CA
=
−
2
12
.
,
( 3-11)
d’autre part, la matrice de contrôlabilité « ré ordonnée » inverse :
[ ]( )∆ i
i i
n miA B A B AB B= − −1 2
2.
, ( 3-12)
Enfin, est introduite la matrice de Toeplitz bloc triangulaire inférieure Hid :
( )
H
D
CB D
CAB CB D
CA B CA B CA B D
id
i i ili mi
=
− − −
0 0
02 3 4
. .
. . .
. .
. . . .
.,
( 3-13)
� Projections orthogonales et obliques
Soient les trois matrices quelconques suivantes P, Q et R respectivement de dimension p j× , q j× et r j× .
Chacune de ces matrices décrivent une base différente dans l’espace de dimension j (les lignes sont les vecteurs !).
Sont alors définies les projections orthogonale et oblique :
◊ P Q est la projection orthogonale de l’espace ligne de la matrice P sur l’espace ligne de la matrice Q
telle que16 :
[ ]P PQ QQ QT TQ = ⋅ ⋅�
( 3-14)
16 L’exposant � correspond à la pseudo-inverse de Moore Penrose.

42/142 3 - Identification sous-espace déterministe - stochastique
Le résultat de cette projection est dans l’espace ligne de Q.
On introduit alors naturellement l’opérateur Π qui projette orthogonalement l’espace ligne de la matrice P sur l’espace ligne de la matrice Q telle que :
P P QQ = .Π ( 3-15)
Finalement on déduit aisément de la projection ( 3-14) la notation propre au complément orthogonal P Q⊥
ainsi que son opérateur correspondant : Π ΠQ j QI⊥ = − .
◊ P RQ est la projection oblique de l’espace ligne de la matrice P sur l’espace ligne de la matrice Q
suivant l’espace ligne de R telle que :
[ ] [ ]P P R RRQ Q Q= ⋅ ⋅⊥ ⊥ �
( 3-16)
P
Q
QT
P/Q
P/QT
Projection orthogonale
P
Q
R
P/RQ
Projection oblique
Espace de dimension 2 (j=2)
Figure 3-2 Représentation schématique des projections orthogonales et obliques
La Figure 3-2 offre une représentation visuelle, dans un espace à deux dimensions, des concepts véhiculés par les notions de projections orthogonale et oblique.
L’exploitation numérique (cf. 3.3.1.4) de ces projections fait appel à un outil mathématique particulièrement bien adapté : la décomposition RQ.
3.3. Identification combinée Dans la suite de cet exposé, sont développées les diverses étapes permettant d’identifier complètement le
système combiné à partir des données entrées sorties. Chacune des étapes décrites ci-après considère successivement les deux algorithmes retenus sous l’aspect mathématique et méthodologique dans un premier temps et sous l’aspect implémentation numérique dans un deuxième temps.
L’identification définitive du système complet déterministe - stochastique tel qu’il est décrit par le système d’équation ( 3-1) comporte deux principales phases.
La première phase - le théorème principal - donne accès, outre à l’ordre 2n du système, à la séquence d’état Xi et à la matrice d’observabilité étendue Γi . Ces dernières sont extraites directement des mesures d’entrées et
sorties.
La présentation de ce théorème est directement issue du travail de synthèse effectué par P. Van Overschee dans [ 39]. Il met en valeur l’uniformité théorique sous-jacente des algorithmes d’identification sous-espace dans l’espace état.

Identification combinée - 3.3 43/142
La deuxième phase - divergente en partie en fonction de l’algorithme retenu - calcule finalement la représentation d’état complète du système déterministe - stochastique soit à partir de la séquence d’état identifiée soit à partir de la matrice d’observabilité étendue.
3.3.1.Théorème principal Le théorème principal, développé dans la suite de cette section, est en grande partie fondé sur l’utilisation du
filtre de Kalman (cf. l’article fondateur [ 22]) qui joue un rôle prépondérant dans l’identification - prédiction de la séquence d’état. Plus précisément (cf. [ 39]), c’est même une succession (ou « banque ») de filtres de Kalman travaillant en parallèle sur les colonnes de Wp qui permet de relier les mesures d’entrées/sorties passées à la
séquence d’état du système sans connaissance préalable d’aucune sorte des matrices de la représentation espace état (cf. Figure 3-3).
Banque de filtres deKalman
Mesurespassées
WpEstimation de la séquence d'état
Xi Figure 3-3 Estimation de la séquence d'état par le filtre de Kalman
Par ailleurs, une analyse des propriétés géométriques met en valeur un autre point de vue du même problème, à savoir : il existe un lien relativement simple entre la séquence d’état et la projection des sorties futures Yf sur
les entrées/sorties passées et sur les entrées futures W
Up
f
.
Cette deuxième analyse est à interpréter en terme de prédiction. Le modèle idéal correspondant typiquement à la solution d’un problème de minimisation d’une erreur de prédiction, la problématique peut se poser intuitivement en ces termes : prédire les sorties futures de manière aussi précise que possible en exploitant toutes les connaissances possibles issues d’une part des entrées/sorties passées et d’autre part des entrées futures du système.
La démonstration du théorème suivant, de taille particulièrement importante, peut être intégralement retrouvée dans [ 39].
Sous les hypothèses générales suivantes :
1. Le vecteur des entrées uk n’est corrélé ni avec le bruit de processus wk ni avec le bruit de mesure vk17.
2. Le vecteur des entrées uk est persistant en excitation d’ordre 2i18 [ 29].
3. Le nombre de mesures disponibles est-illimité19.
4. Le bruit de processus wk ainsi que le bruit de mesure vk ne sont pas identiquement nuls.
17 Pour remplir cette condition, une chaîne de mesure en « boucle ouverte » est nécessaire afin d’éviter tout feed-back.
18 Signifie que le signal uk contient au moins i fréquences sinusoïdales différentes. N’importe quel bruit blanc ou coloré
satisfait à cette hypothèse.
19 Lorsque j → ∞ , la consistance des résultats est garantie [ 39]. Dans la pratique, on se contente d’un nombre
« suffisamment » grand.

44/142 3 - Identification sous-espace déterministe - stochastique
5. Les matrices W1 et W2 (variables suivant l’algorithme retenu20), respectivement de dimension li li× et
j j× , vérifient :
◊ ( )rang rang completW1 =
◊ ( ) ( )rang rangW W Wp2 2= ,
et avec Oi la projection oblique définie de la manière suivante21 :
Oi f U pY Wf
= ( 3-17)
Oi est de dimension li j× .
ainsi que sa décomposition en valeurs singulières22 associant les deux matrices W1 et W2 :
[ ]( )
W W U US V
VU S Vi
li li
T
TT
1 2 1 21 1
21 1 1
0
0 0O = ⋅
⋅
=,
( 3-18)
il vient :
1. La projection oblique Oi est égale au produit de la matrice d’observabilité étendue avec la séquence d’état
estimée issue du filtre de Kalman :
Oi i iX= Γ ( 3-19)
2. L’ordre du système identifié 2n est égal au nombre de valeurs singulières différentes de 0 : S1 est de
dimension 2 2n n× .
3. La matrice d’observabilité étendue Γi est égale à23 :
Γi W U S T= −1
11 1
12 ( 3-20)
4. X Wi 2 (la part de la séquence d’état Xi estimée projetée dans l’espace colonne de W2 ) se retrouve
avec24 :
X W T S ViT
21
1 112= − ( 3-21)
5. La séquence d’état Xi estimée (complète !) est égale à :
Xi i i= Γ�O ( 3-22)
La suite du propos prend maintenant en considération les deux algorithmes sous-espace retenus dans le cadre de ce travail. Il s’agit des algorithmes N4sidr et Moesp.
20 W1 et W2 conditionnent la base dans laquelle la représentation espace état finale est obtenue.
21 La condition 5 évite une perte de rang de la matrice Oi .
22 SVD : Singular Value Decomposition.
23 T : matrice non singulière de changement de base (représentations similaires).
24 W2 n’étant pas de rang complet, Xi ne peut pas s’extraire intégralement.

Identification combinée - 3.3 45/142
3.3.1.1.L’algorithme N4sidr
L’algorithme N4sidr, proposé par P. Van Overschee dans [ 39], est la version robuste de l’algorithme N4sid - Numerical algorithms for Subspace State Space System IDentification - initialement proposé par P. Van Overschee et B. De Moor dans [ 40]. Il s'insère complètement dans le cadre du théorème principal avec un choix des matrices W1 et W2 s’avérant identique au cas de Moesp.
3.3.1.2.L'algorithme Moesp
L’algorithme Moesp, - “Multivariable Output-Error State sPace” - a été initialement développé par M. Verhaegen dans [ 46] indépendamment du schéma proposé par le théorème général.
Mais, en définitive, P. Van Overschee et B. De Moor prouvent dans [ 42] que l’algorithme Moesp s’insère exactement dans le cadre du théorème principal cité précédemment dès lors que :
W I
Wli
U f
1
2
==
⊥Π ( 3-23)
3.3.1.3.Bilan et remarques
En définitive, quel que soit l’algorithme N4sidr ou Moesp, il vient :
◊ pour la décomposition en valeurs singulières, en remplacement de l’équation ( 3-18) :
[ ]Oi U
T
TT
fU U
S V
VU S V∏ = ⋅
⋅
=⊥ 1 21 1
21 1 1
0
0 0 ( 3-24)
◊ pour la matrice d'observabilité étendue et à une transformation de similitude près25, en remplacement de l'équation ( 3-20) :
Γi U S= 1 112 ( 3-25)
Le calcul de la séquence d’état estimée appliquée aux algorithmes N4sidr et Moesp n’est pas développé plus avant car on verra par la suite que ces deux algorithmes n’exploitent pas Xi pour l’identification de la
représentation espace état.
Détermination pratique de l’ordre du système
L’une des hypothèses du théorème général est de disposer - en théorie - d’un nombre de mesures illimité. Or dans la pratique, le nombre de mesures N (ou indirectement j - cf. équation ( 3-7)) n’est pas infini, pas plus d’ailleurs que le système n’est complètement linéaire. Or, ces deux constats pratiques ont comme conséquence que les valeurs singulières de W W1 2O - équation ( 3-18) - sont toutes différentes de zéro. Autrement dit, l’espace
ligne de O est de dimension complète li et il n’est pas possible d’en déduire directement l’ordre 2n du système étant donné que celui-ci se déduit théoriquement du nombre de valeurs singulières non identiquement nulles.
C’est pourquoi dans la pratique, ce dernier est choisi comme égal aux nombres des valeurs dites « dominantes » de la décomposition en valeurs singulières.
25 T est supprimée.
46/142 3 - Identification sous-espace déterministe - stochastique
Les matrices W1 et W2
Jusqu'à présent, il n’a pas été fait cas du rôle des matrices W1 et W2 . Pourtant, celles-ci ont une fonction bien
précise : obtenir un ordre identifié 2n le plus petit possible.
Intuitivement - grâce aux outils géométriques introduits au § 3.2 que sont les projections orthogonale et oblique - l’identification sous-espace peut se percevoir de la manière suivante : prédire les sorties futures Yf en
utilisant toute l’information contenue d’une part dans les entrées et sorties passées Wp , d’autre part dans les
entrées futures U f . Cet autre point de vue est à interpréter en terme de prédiction ; le modèle idéal correspond
typiquement à la solution d’un problème de minimisation d’une erreur de prédiction. Dans [ 39], il est montré que la combinaison optimale des données passées pour prédire les sorties futures est la projection oblique Oi de
l’équation ( 3-17) et ce tout à fait indépendamment des matrices W1 et W2 .
Le problème ainsi posé, la recherche de réduction de l’ordre du système identifié est équivalent à la réduction de l’information contenue dans Oi . En effet, la projection oblique utilise la totalité du contenu passé pour en
déduire le futur. Or, une partie de l’information passée n’est pas utile et peut être retranchée ; c’est précisément le rôle des matrices W1 et W2 qui ont à charge de ne retenir que l’information utile de Oi . La recherche de matrices
W1 et W2 idéales est encore à l’état de recherche.
3.3.1.4.Implémentation numérique
Les projections orthogonales et obliques introduites dans la section 3.2 et la décomposition en valeurs singulières sont les deux fondements opératoires du théorème principal énoncé ci avant.
En ce qui concerne les opérations géométriques de projections, il a déjà été précisé (voir encore § 3.2) que l’outil privilégié est la décomposition RQ.
En l’occurrence, il s’agit ici de pourvoir à l’obtention d’une part de la projection oblique Oi - telle qu’elle est
définie par l’équation ( 3-17) : Oi f U pY Wf
= - et d’autre part (et surtout !) à la matrice Oi U f⋅ ∏ ⊥ de l’équation
( 3-24) à partir de laquelle la décomposition en valeurs singulières est effectuée.
Pour autant, le mode opératoire de cette décomposition RQ peut diverger d'un algorithme sous-espace à l'autre. Il reste que quelque que soit la forme spécifique employée, celle-ci fait de toute façon intervenir une matrice block Hankel globale comprenant toutes les entrées et sorties passées et futures. Ainsi, l’une de ces formes pourrait être :
( )( )
U
U
Y
Yj
RQ
p
f
p
fm l i j
T
=
+2
1
,
( 3-26)
avec
◊ QT orthonormale ( )( )Q Q ITm l i= +2 de dimension ( )2 m l i j+ ×
◊ R triangulaire inférieure de dimension ( ) ( )2 2m l i m l i+ × +
La présentation des implémentations numériques subséquentes utilise largement les notations propres au logiciel de calcul matriciel Matlab® [ 34] pour définir en particulier la sélection des lignes et colonnes au sein d’une matrice.

Identification combinée - 3.3 47/142
3.3.1.4.a.L’algorithme N4sidr
L’algorithme N4sidr utilise une forme de décomposition RQ identique à l’équation ( 3-26), mais la partitionne de la manière suivante :
( )
( )
U
U
Y
Y
U
U
U
Y
Y
Y
R
R R
R R R
R R R R
R R R R R
R R R R R R
p
f
p
f
mi
m
m i
li
l
l i
o i
i i
i i
o i
i i
i i
j
=
=
⋅−
−
−
+ −
−
+ −
1
1
1
1 2 1
1
1 2 1
11
21 22
31 32 33
41 42 43 44
51 52 53 54 55
61 62 63 64 65 66
( )
( )
mi
m
m i
li
l
l i
T
T
T
T
T
T
j
Q
Q
Q
Q
Q
Q
−
−
1
1
1
2
3
4
5
6
( 3-27)
En définissant LU p, LU f
toutes deux de dimension li mi× et LYp de dimension li li× comme étant :
[ ] [ ] [ ]L L L R RU U Yp f p= 5 6 4 4 1 4 1 4: , : ���
� ( 3-28)
il vient pour la décomposition en valeurs singulières :
[ ] [ ] [ ]Y W L R L R L R Qf U p U U Y YT
f f p p p⋅ ∏ = +
⋅
⋅⊥ 11 1 3 4 4 1 3 44 1 4: , : : , : :Θ ( 3-29)
avec :
[ ] [ ] [ ] [ ]Θ = − ⋅
⋅−
I R R R RmiT T
2 2 3 1 3 2 3 1 3 2 3 1 3
1
2 3 1 3: , : : , : : , : : , : ( 3-30)
La propriété d’orthonormalité de [ ]Q1 4: permet (cf. aussi le cas de l’algorithme Moesp : section 3.3.1.4.b de
cette même partie) de supprimer ce terme dans le calcul de la décomposition en valeurs singulières - équation ( 3-29). C’est ainsi que l’algorithme N4sidr s’affranchit de la connaissance de Q pour la détermination de l’ordre 2n du système et l’extraction subséquente des matrices U1 et S1 .
L’équation ( 3-25) prend alors en charge le calcul de la matrice d’observabilité étendue Γi .
3.3.1.4.b.L’algorithme Moesp
La décomposition RQ propre à l’algorithme Moesp « rejette les matrices d’entrée et sortie futures sur l’extérieur » telle que :
U
U
Y
Y
U
W
Y
R
R R
R R R
R R R R
Q
Q
Q
Q
f
p
p
f
f
p
f
mi
mi
li
li
mi
mi
li
li
T
T
T
T
j
=
=
⋅
11
21 22
31 32 33
41 42 43 44
1
2
3
4
( 3-31)
Il vient alors sobrement pour la décomposition en valeurs singulières :
[ ] [ ]Y W R RQ
QU U
S V
Vf U p U
T
T
T
Tf f⋅∏ = ⋅
= ⋅
⋅
⊥ 42 432
31 2
1 1
2
0
0 0 ( 3-32)
Afin de déterminer l’ordre 2n du système et calculer la matrice d’observabilité étendue Γi , le processus
devrait poursuivre sur la décomposition en valeurs singulières de l’équation ( 3-32). En fait, à ce point des

48/142 3 - Identification sous-espace déterministe - stochastique
calculs, l'algorithme Moesp, tel qu'il a été décrit initialement par ses auteurs, calcule la SVD sans recourir au
terme orthonormal Q
Q
T
T2
3
; il vient ainsi :
[ ] [ ]R R U US V
V
m mm mT
mT42 43 1 21 1
2
0
0 0= ⋅
⋅
( 3-33)
Mais il est montré dans [ 42] qu’en définitive du fait de l’orthonormalité de Q
Q
T
T2
3
, il y a complète égalité des
termes U U m1 1= et S Sm
1 1= entre les équations ( 3-32) et ( 3-33).
En revanche, Michel Verhaegen fait le choix suivant d’une approximation consistante (parmi d’autres) de la matrice d’observabilité étendue ainsi que de son complément orthogonal :
ΓimU= 1 ( )Γi li li n
mU⊥− =, 2 2 ( 3-34)
3.3.1.4.c.Bilan
Comme les sections précédentes l’ont mis en valeur, l’un des atouts majeurs de la décomposition RQ réside dans la non - utilisation du terme Q autorisant finalement simplement le calcul du terme R.
Il s’avère par ailleurs que de récents développements théoriques ([ 8], [ 9]) exploitant de manière plus efficace la structure de la matrice de block Hankel globale sont à même de réduire grandement le calcul de R.
3.3.2.Calcul de la représentation d’état L’application du théorème principal précédent met à disposition, pour la suite de l’identification, d’une part
l’ordre du système après inspection des valeurs singulières de l’équation ( 3-18), d’autre part la matrice d’observabilité étendue Γi grâce à l’équation ( 3-25).
3.3.2.1.L’algorithme N4sidr
Dans [ 39], il est montré que le problème se réduit en définitive à :
{
{
{
ΓΓi i
i ii i f
w
v
Z
Y
A
CZ K U
�
�+
=
⋅ + +
1
1 terme
2 terme
3 termeer
ème
ème
ρρ
( 3-35)
où
Z YW
Ui fp
f=
/ Z Y
W
Ui fp
f+
−+
−=
1 / ( 3-36)
[ ][ ]
KB H A H
D C H
i id
i id
i id
=−
−
−Γ Γ
Γ
� �
�
1
0 ( 3-37)
et Γi correspond à Γi sans les l dernières lignes soit en définitive : Γ Γi i= −1 . Γi est donc de dimension
( )l i n− ×1 2 .

Identification combinée - 3.3 49/142
� Etape 1 : l’équation ( 3-35) est résolue au sens des moindres carrés pour A, C et K. A noter que (cf. [ 39] et [ 40]) la solution calculée est une solution non biaisée dès lors que le nombre de mesures est supposé infini. Ainsi, le 1er terme fournit les matrices A et C.
Somme toute, cette solution ne garantit pas la stabilité systématique de la matrice A si le système s’avérait disposer de modes instables. Le problème est particulièrement sensible pour des systèmes d’ordre élevé ou non linéaires. Une manière de forcer la stabilité - ainsi qu’elle est rapportée dans [ 39] - serait d’utiliser la structure caractéristique de la matrice d’observabilité étendue Γi , comme il en est fait cas pour l’algorithme Moesp, pour
extraire aisément la matrice A (cf. § 3.3.2.2).
� Etape 2 : la matrice d’observabilité étendue Γi (ainsi que Γi −1 ) est recalculée avec ces matrices A et C
précédemment identifiées. En effet, la matrice d’observabilité originale (identifiée à partir des mesures d’entrées et sorties) n’est qu’une approximation de sa version théorique exacte (Théoriquement, le nombre de mesures est supposé être infini : j → ∞ - cf. § 3.3.1). D’une certaine manière, la matrice d’observabilité étendue devient plus
« compatible » avec les matrices A et C, permettant ultérieurement un meilleur calcul des matrices B et D.
� Etape 3 : A et C étant déjà déterminées, K est linéaire en B et D et ces dernières pourraient s'extraire par exemple par une méthode des moindres carrés. Mais, justement au lieu de calculer B et D directement à partir du 2ème terme K de l’équation ( 3-35), celles-ci sont plutôt déterminées (cf. [ 39]) par le calcul de minimisation d'erreur de prédiction suivant26 :
{ ( )B DZ
Y
A
CZ K B D U
B D
i i
i ii i f
F
, ,,
=
−
⋅ − ⋅+arg min
ΓΓ
�
�1
2
( 3-38)
Dans l’équation ( 3-38), seul le terme K(B,D) est inconnu.
� Etape 4 : le 3ème terme de l’équation ( 3-35) - les résidus ρw et ρv - permet d’obtenir une approximation
des matrices de covariances Q, S et R conformément à27 :
{ }Q S
S RET j
w
vwT
vT
≅
⋅
ρρ ρ ρ ( 3-39)
Là encore, l’approximation est due à la finitude de i et j.
3.3.2.2.L’algorithme Moesp
� Etape 1 : l’identification des matrices A et C exploite directement les propriétés structurelles particulières de la matrice d’observabilité étendu Γi . Ainsi, il vient :
Γ Γi iA = ( 3-40)
( )[ ]C i l= Γ
1: ,: ( 3-41)
où Γi correspond à Γi sans les l premières lignes et est de dimension ( )l i n− ×1 2 .
26 L’indice
F représente la norme de Frobenius.
27 De fait de l’ergodicité et du nombre infini de mesures supposés, l’espérance mathématique E (moyenne sur un nombre infini d’expérimentations) peut être remplacée par E j (moyenne sur une seule expérimentation composée d’un nombre
infini de données).

50/142 3 - Identification sous-espace déterministe - stochastique
A est la solution - non biaisée - de l’équation ( 3-40) et doit être résolue, par exemple, par une méthode des moindres carrés étant donné que cette égalité n’est pas complètement exacte du fait du nombre fini de mesures N.
En utilisant les notations matricielles de Matlab®, C correspond aux l premières ligne de Γi .
� Etape 2 : en introduisant la matrice de Toeplitz bloc triangulaire inférieur Hid , il vient [ 46] lorsque
N → ∞ :
[ ] [ ]Γ ΓiT
iT
idR R R R R R H⊥ ⊥⋅ ⋅ = ⋅31 32 41 21 22 11
� ( 3-42)
Hid , linéaire en B et D, est alors la seule inconnue de l’équation ( 3-42) - A et B étant préalablement
déterminées à l’étape 1.
En posant le terme de gauche égal à ( )( ) [ ] [ ]Ξ Γli n i m iT
R R R R R R−⊥= ⋅2 31 32 41 21 22 11,
�, l’extraction de B
et D s’effectue par la suite en résolvant, par une méthode des moindres carrés par exemple, l’équation ( 3-43) suivante [ 47] :
[ ][ ]
( )[ ]
[ ] [ ] ( )[ ]
[ ] [ ]
( )[ ] ( )( )
Ξ
ΞΞ
Ξ
Γ Γ Γ
Γ Γ
Γ
=
=
⋅
+
− +
⊥ ⊥+
⊥− +
⊥+
⊥+
⊥− +
−
:, :
:, :
:, :
: ,: : ,: : ,:
: ,: : ,:
: ,:,
.
.
.
. . . .
.
1
1 2
1 1
1 1 2 1 1
1 2 2 1 3
1 12
0
0 0
m
m m
m i mi
i l
Ti l l
Ti l i li
T
i l l
Ti l l
T
i l i li
T
li n i li
I ( ) ( )
( )( ) ( )( ) ( )
( )( ) ( )
l l l n
l i l i l i nli l n
l m
n ml n m
D
B, ,
, ,,
,
,,
0
02
1 1 22
22
− −+ +
⋅
Γ
( 3-43)
� Etape 3 : l’approche, utilisée ici [ 3] pour déterminer la partie stochastique du système, s’apparente à celle retenue pour l’algorithme N4sidr et exploite en particulier le fait que l’équation ( 3-35) établie pour N4sidr est en tout point valable pour Moesp.
Une fois obtenus - à partir de R28 - les termes Zi et Zi +1 , la question se réduit alors à identifier le résidu du
problème aux moindres carrés suivant :
{minK
i i
i i
i i
fF
Z
YK
Z
U
Γ Γ� �+
− ⋅
1
2
( 3-44)
Par analogie avec l’équation ( 3-35) du problème de minimisation de N4sidr, ce résidu fournit les deux termes ρw et ρv (3ème terme) qui permettent alors de calculer les matrices de covariances (équation ( 3-39)).
3.3.2.3.Implémentation numérique
3.3.2.3.a.L’algorithme N4sidr
A nouveau, la décomposition RQ de l’équation ( 3-27) ainsi que les propriétés géométriques des projections sont mises à profit pour déterminer les termes Zi , Zi +1 et U f de l’équation ( 3-35). Afin de faciliter la
présentation, les termes Λ g et Λd sont définis tels que :
28 … de la décomposition RQ de Moesp !

Identification combinée - 3.3 51/142
[ ][ ]
ΛΓ Γ
gi i
i i
iZ
Y
R
R=
=
+� �
1 6 6 15
5 5 15
: , :
: , :
[ ][ ]
ΛΓ Γ
di i
f
iZ
U
R
R=
=
� �5 6 15
2 3 15
: , :
: , :
( 3-45)
� Etape 1 : les matrices A et C s’extraient en ne prenant que les 2n premières colonnes du calcul de pseudo-
inverse suivant Λ Λg d� , soit :
( )[ ]A
C g d n
= Λ Λ�
:, :1 2 ( 3-46)
� Etape 2 et 3 : une fois recalculées les matrices Γi et Γi (étape 2) avec la connaissance de A et C obtenues
en ( 3-46), les éléments P et Q sont introduit permettant de finaliser le calcul de minimisation établi à l’équation ( 3-38) :
[ ]P P=
−
⋅ → = −
+ΓΓ Λ Γi i
i ii i g i
Z
Y
A
CZ
A
CR
�
� �15 6 15: , : ( 3-47)
( )
[ ]Q
Q
Q
Q
Q=
= → =
1
22 3 15.
,
: , :
i mi j
fU R ( 3-48)
En posant :
( )
LL L L
L L L=
=
⋅
+
11 1 2 1
2 1 2 2 2
.
.,
i
i n l lii
A
C� ( 3-49)
[ ] ( )( )M M M M= =− −1 2 1 1.
,i n l i i� ( 3-50)
NL M L
L L
NM L M L
L L
NM L
L
111 1 1
2 1 2
21 12 1 1
2 2 2
1 1
2
0
0
0 0
0 0
=− −− −
⋅
=− −
−
⋅
=−
−
⋅
−
−
−
.
.
.
.
..
.
i i
l i
l
i
i i
i
l
i
ii i
i
l
i
I
I
I
I
Γ
Γ
Γ
( 3-51)
avec Ni de dimension ( ) ( )l n l n+ × + , il découle la solution moindres carrés de l’équation ( 3-38) - d’où l’on
extrait les matrices B et D :
( )vecD
Bveck
Tk
k
i
= ⊗
⋅
=∑Q N P
1
�
( 3-52)
où
◊ l’opérateur ⊗ est le produit de Kronecker.
◊ l’opérateur « vec » empile successivement chacune des colonnes de la matrice considérée pour former un vecteur colonne.

52/142 3 - Identification sous-espace déterministe - stochastique
� Etape 4 : Les matrices de covariances Q, S et R s’obtiennent en calculant :
[ ][ ] [ ][ ]Q S
S RT g g d d g g d d
T
= − ⋅ ⋅ − ⋅Λ Λ Λ Λ Λ Λ Λ Λ� � ( 3-53)
3.3.2.3.b.L’algorithme Moesp
� Etape 1 et 2 : l’implémentation numérique des deux premières étapes de Moesp ne demande pas à être plus détaillée compte tenu qu’elle s’inscrit directement sur la procédure théorique décrite dans la section 3.3.2.2 précédente.
� Etape 3 : le problème aux moindres carré impose le calcul des éléments suivants [ 3] :
( ) ( ) ( )[ ]Z Ri m l i m l i m l i= + + + +2 1 2 1 2: , : ( 3-54)
( ) ( ) ( )[ ]Z Ri m l i l m l i m l i l+ + + + + + +=1 2 1 2 1 2: , : ( 3-55)
( )[ ]Y Ri i mi m l i l= + +1 1 2: , : ( 3-56)
Une fois obtenus ces éléments, la poursuite du calcul de minimisation s’apparente au processus entrepris pour N4sidr et décrit dans la section précédente (§ 3.3.2.3.a de cette même partie) et permet au final l’extraction des matrices de covariances Q, S et R.

53/142
4. Simulations numériques
L’ensemble de ce chapitre propose les résultats et conclusions issus de simulations numériques effectuées sur le logiciel Matlab®.
L’étape fondamentale de la réalisation d’un modèle espace état à partir des entrées et sorties est confiée aux deux algorithmes sous-espace N4sidr et Moesp.
La première section de ce chapitre évalue numériquement le processus d’identification autonome de la matrice physique d’un système dynamique lorsque le nombre d’entrées est réduit, c’est-à-dire inférieur au
nombre de modes identifiés (m< nid ).
La deuxième section apprécie successivement l’intérêt et les potentiels des trois méthodes de recombinaison de manière générale mais aussi en fonction d’un certain nombre de variables et paramètres expérimentaux propres aux conditions de mises en œuvre.
Ces simulations sont conduites tout d’abord avec des signaux non bruités, puis avec des signaux de sorties de plus en plus bruités (1% et 10%).
Le modèle numérique retenu pour l’ensemble de cette étude (une structure à 4 degrés de liberté) ainsi que les paramètres généraux associés (en particulier aux algorithmes d’identification) sont présentés ci-après.
Système à 4 degrés de liberté
Le système retenu présente les caractéristiques physiques suivantes :
M =
300 0 0
0 220
300 0
0 0 310
.
. .
. .
.
C=
−− −
− −−
102
23 15 0 0
15 26 11 0
0 11 13 2
0 0 2 12
K=
−− −
− −−
104
32 16 0 0
16 36 20 0
0 20 35 15
0 0 15 29
( 4-1)
Ses caractéristiques modales correspondantes sont :
Fréquence f [Hz] Taux d’amortissement ε [%]
Mode 1 2.30 4.38 Mode 2 4.45 7.69 Mode 3 5.89 8.70 Mode 4 7.83 15.92
Tableau 4-1 Caractéristiques modales du système à 4 ddls29
Spécifications de calculs
Sont précisées ci-après les spécifications générales à l’ensemble des simulations et communes aux deux algorithmes Moesp et N4sidr :
- Nombre de tests30=50.
29 ddls signifie « degrés de liberté ».
54/142 4 - Simulations numériques
- Fréquence d’échantillonnage=30 Hz.
- Nombre de mesures=1200.
- Nombre de blocs en lignes=12.
- Le nombre de degré n est limité à 4 au maximum.
- Signaux d’entrées : excitation aléatoire de moyenne nulle et de variance unité, i.e. un bruit blanc.
30 La détermination du nombre de tests optimum n’a fait l’objet d’aucune étude et a donc été volontairement choisi assez
important.
4.1. Identification autonome des matrices physiques
Le but de cette partie est de valider les possibilités d’identification autonome de la matrice masse M lorsque
le nombre d’entrées m est inférieur au nombre de modes identifiés nid .
Dans la pratique, seulement quelques excitateurs sont positionnés sur la structure si ce n’est plutôt généralement qu’un seul ; aussi sauf peut être en de rares cas, le nombre d’entrées n’atteint pas le nombre de modes identifiés retenus. C’est pourquoi, la possibilité d’accéder aux caractéristiques mécaniques dans des conditions courantes d’analyse dynamique est d’un intérêt majeur.
Le principe d’une identification autonome de M lorsque m<nid , est donc évalué au cours de cette section. Celui-ci repose sur la possibilité d’identifier proprement la masse mi de l’entrée numéro i à partir de la matrice
Bcid ; cette dernière ayant été identifiée par la seule connaissance des signaux d’entrées et sorties puis projetée
dans l’espace physique.
4.1.1.Evaluation des résultats La capacité d’identification autonome est évaluée en inspectant la qualité des matrices physiques identifiées.
Pour ce faire, une série de tests (avec des signaux d’entrées différents d’un test à l’autre) est réalisée. Sur ces bases, deux calculs d’erreur peuvent être réalisés en relation avec les matrices physiques identifiées :
◊ Le premier, ayant pour objectif de mettre en valeur la robustesse des algorithmes et des procédures de calculs employées, consiste à extraire les matrices d’erreur relative maximale - respectivement Ε M max
ΕC max Ε K max - sur l’ensemble des tests. Cette erreur s’affranchit donc de l’inconsistance possible des
résultats et fournit une idée du taux d’erreur maximum.
◊ Le deuxième est la moyenne de l’erreur relative Ε MCK moy . Cet autre calcul permet d’évaluer l’intérêt
d’effectuer une série de tests et de réaliser une moyenne pour identifier ces matrices physiques dont les valeurs sont particulièrement sensibles à la qualité de l’identification.
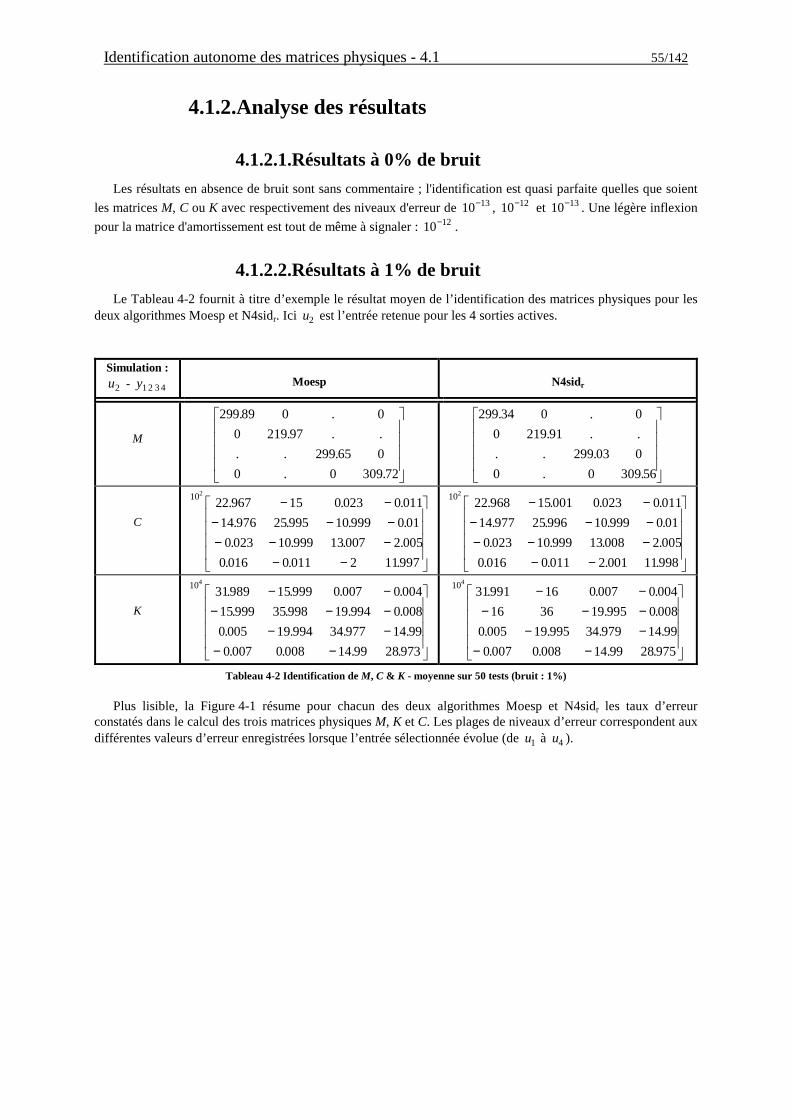
Identification autonome des matrices physiques - 4.1 55/142
4.1.2.Analyse des résultats
4.1.2.1.Résultats à 0% de bruit
Les résultats en absence de bruit sont sans commentaire ; l'identification est quasi parfaite quelles que soient
les matrices M, C ou K avec respectivement des niveaux d'erreur de 10 13− , 10 12− et 10 13− . Une légère inflexion
pour la matrice d'amortissement est tout de même à signaler : 10 12− .
4.1.2.2.Résultats à 1% de bruit
Le Tableau 4-2 fournit à titre d’exemple le résultat moyen de l’identification des matrices physiques pour les deux algorithmes Moesp et N4sidr. Ici u2 est l’entrée retenue pour les 4 sorties actives.
Simulation : u2 - y12 3 4
Moesp
N4sidr
M
299 89 0 0
0 219 97
299 65 0
0 0 309 72
. .
. . .
. . .
. .
299 34 0 0
0 219 91
299 03 0
0 0 309 56
. .
. . .
. . .
. .
C
102
22 967 15 0 023 0 011
14 976 25995 10 999 0 01
0 023 10 999 13007 2 005
0 016 0 011 2 11997
. . .
. . . .
. . . .
. . .
− −− − −− − −
− −
102
22 968 15001 0 023 0 011
14 977 25996 10 999 0 01
0 023 10 999 13008 2 005
0 016 0 011 2 001 11998
. . . .
. . . .
. . . .
. . . .
− −− − −− − −
− −
K
104
31989 15999 0 007 0 004
15999 35998 19 994 0 008
0 005 19 994 34 977 14 99
0 007 0 008 14 99 28973
. . . .
. . . .
. . . .
. . . .
− −− − −
− −− −
104
31991 16 0 007 0 004
16 36 19 995 0 008
0 005 19 995 34 979 14 99
0 007 0 008 14 99 28 975
. . .
. .
. . . .
. . . .
− −− − −
− −− −
Tableau 4-2 Identification de M, C & K - moyenne sur 50 tests (bruit : 1%)
Plus lisible, la Figure 4-1 résume pour chacun des deux algorithmes Moesp et N4sidr les taux d’erreur constatés dans le calcul des trois matrices physiques M, K et C. Les plages de niveaux d’erreur correspondent aux différentes valeurs d’erreur enregistrées lorsque l’entrée sélectionnée évolue (de u1 à u4 ).
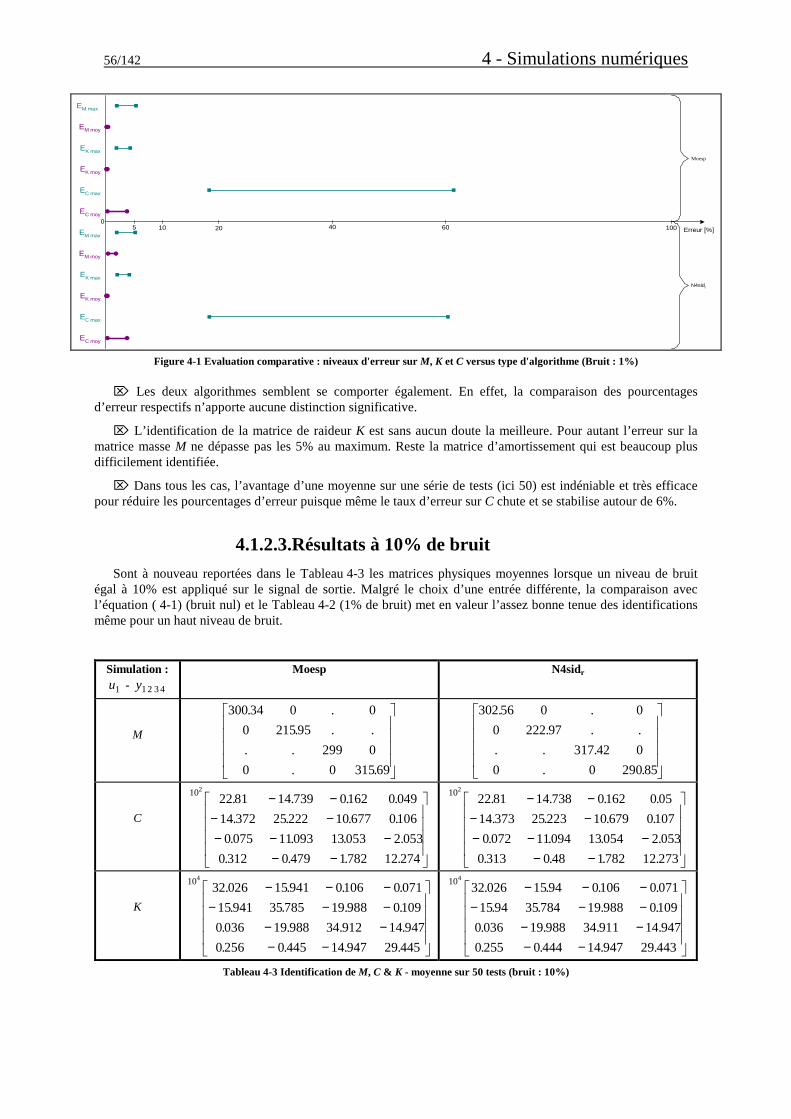
56/142 4 - Simulations numériques
Moesp
N4sidr
EK max
EK moy
EC moy
EC max
010 20 40 1005
EM max
EM moy
EK max
EK moy
EC moy
EC max
EM max
EM moy
60 Erreur [%]
Figure 4-1 Evaluation comparative : niveaux d'erreur sur M, K et C versus type d'algorithme (Bruit : 1%)
Les deux algorithmes semblent se comporter également. En effet, la comparaison des pourcentages d’erreur respectifs n’apporte aucune distinction significative.
L’identification de la matrice de raideur K est sans aucun doute la meilleure. Pour autant l’erreur sur la matrice masse M ne dépasse pas les 5% au maximum. Reste la matrice d’amortissement qui est beaucoup plus difficilement identifiée.
Dans tous les cas, l’avantage d’une moyenne sur une série de tests (ici 50) est indéniable et très efficace pour réduire les pourcentages d’erreur puisque même le taux d’erreur sur C chute et se stabilise autour de 6%.
4.1.2.3.Résultats à 10% de bruit
Sont à nouveau reportées dans le Tableau 4-3 les matrices physiques moyennes lorsque un niveau de bruit égal à 10% est appliqué sur le signal de sortie. Malgré le choix d’une entrée différente, la comparaison avec l’équation ( 4-1) (bruit nul) et le Tableau 4-2 (1% de bruit) met en valeur l’assez bonne tenue des identifications même pour un haut niveau de bruit.
Simulation : u1 - y12 3 4
Moesp N4sidr
M
300 34 0 0
0 21595
299 0
0 0 31569
. .
. . .
. .
. .
302 56 0 0
0 222 97
317 42 0
0 0 290 85
. .
. . .
. . .
. .
C
102
22 81 14 739 0162 0 049
14 372 25222 10 677 0106
0 075 11093 13053 2 053
0 312 0 479 1782 12 274
. . . .
. . . .
. . . .
. . . .
− −− −− − −
− −
102
22 81 14 738 0162 0 05
14 373 25223 10 679 0107
0 072 11094 13054 2 053
0 313 0 48 1782 12 273
. . . .
. . . .
. . . .
. . . .
− −− −− − −
− −
K
104
32 026 15941 0106 0 071
15941 35785 19 988 0109
0 036 19 988 34 912 14 947
0 256 0 445 14 947 29 445
. . . .
. . . .
. . . .
. . . .
− − −− − −
− −− −
104
32 026 1594 0106 0 071
1594 35784 19 988 0109
0 036 19 988 34 911 14 947
0 255 0 444 14 947 29 443
. . . .
. . . .
. . . .
. . . .
− − −− − −
− −− −
Tableau 4-3 Identification de M, C & K - moyenne sur 50 tests (bruit : 10%)

Identification autonome des matrices physiques - 4.1 57/142
En outre et de manière similaire au cas avec 1% de bruit, la Figure 4-2 résume l’ensemble des résultats des simulations pour 10% de bruit.
Moesp
N4sidr
EK max
EK moy
EC moy
EC max
010 20 40 1005
EM max
EM moy
EK max
EK moy
EC moy
EC max
EM max
EM moy
60
>> 200 %
>> 200 %
Erreur [%]
Figure 4-2 Evaluation comparative : niveaux d'erreur sur M, K et C versus type d'algorithme (Bruit : 10%)
Les deux algorithmes Moesp et N4sidr ne peuvent être départagés ; leur efficience est analogue.
La matrice K reste la plus facile à identifier et la matrice C la plus délicate. Pour ce qui est de la matrice d’amortissement, une identification unique ne peut pas fournir un résultat correct puisque le taux d’erreur peut être supérieur à 200%…
Finalement, une série de tests est impérative si le niveau de bruit n’est pas négligeable. Malgré tout, le résultat final reste fortement affecté en général, même s’il est à nuancer en fonction de la matrice physique étudiée.
4.1.3.Conclusion Les résultats de simulations développés ci avant ont permis de valider le principe d’une identification
totalement autonome des matrices physiques à partir seulement des données entrées et sorties quel que soit le nombre d’entrées disponibles (il reste que le nombre de sorties doit être impérativement égal au nombre de modes).
Associé aux trois méthodes de recombinaison proposées en 2.3 et validées numériquement en 4.2, la méthode d’identification autonome complétée dans cet ouvrage (§ 2.2) fournit à l’expérimentateur un outil théorique complet permettant un traitement approprié de l’identification des paramètres physiques d’une structure quelques que soient les conditions expérimentales rencontrées.
4.2. Recombinaison de plusieurs représentations d'état
Le but de ces simulations est d'évaluer l'efficience des méthodes qui ont été proposées au chapitre 2.3 relatives à la recombinaison de plusieurs représentations partielles.
Disposant d’au moins deux « sous représentations » d’état d’un même système physique pourvues d’un nombre d’entrées et de sorties réduits et éventuellement de modes en partie différents, il est possible, grâce à des méthodes de recombinaison exploitant principalement les propriétés des représentations d’état, de reconstituer

58/142 4 - Simulations numériques
une représentation d’état unique et plus étendue représentative de la structure étudiée. Cette dernière dispose alors de la totalité des entrées, sorties et modes issus des représentations initiales.
Ces méthodes, au nombre de trois, sont les suivantes :
1) La première méthode proposée consiste à ré associer deux représentations partielles dans un espace commun quelconque. Outre la nécessité d’avoir identifié les mêmes modes dans les deux représentations d’état partielle, la condition nécessaire pour utiliser cette première méthode se résume à disposer d’au moins une entrée et une sortie commune aux deux modèles espace état partiels.
2) La deuxième méthode s’intéresse à la reconstitution dans un espace commun plus spécifique : l’espace à interprétation physique ; espace unique pour un système mécanique donné. Cette deuxième méthode impose, pour les deux représentations partielles, d’utiliser toutes les sorties du système. En conséquence afin de pouvoir projeter dans la base physique, la présence de tous les modes pour ces deux sous représentations est impérative (même nombre de modes que de nombre de sorties).
3) La troisième méthode délivre aussi une représentation d’état globale dans l’espace à interprétation physique mais exploite en sus les masses mi préalablement connues en association avec la description
relationnelle de la structure. En revanche et contrairement à la deuxième méthode, chacune des représentations partielles peut n’utiliser qu’une partie seulement des sorties et n’identifier qu’une partie des modes.
4.2.1.Evaluation des résultats Les trois méthodes rappelées succinctement au paragraphe précédent sont évaluées sous trois aspects :
1) L’aspect exactitude (cf. § 4.2.1.1) : il s’agit de comparer le résultat de l’identification à la solution exacte.
2) L’aspect consistance (cf. § 4.2.1.2) : analyse des qualités de reproductivité des identifications et recombinaisons successives.
3) Enfin la qualité des matrices physiques identifiées est également inspectée et ce de la manière décrite précédemment au § 4.1.1 page 54.
4.2.1.1.Erreur d’exactitude
L’évaluation de l’exactitude s’inspire de la théorie du contrôle qui évalue la valeur singulière maximale de
l’erreur commise entre la matrice des fonctions de transfert ( )$H jω vraie et la matrice des fonctions de transfert
( )H jω identifiée. Ce calcul est effectué à chaque fréquence. Plus cette valeur est petite, meilleure est
l’exactitude. On définit ( )σ ωH tel que31 :
( ) ( )( )( )σ ωωH H j= max SV ∆ ( 4-2)
avec : ( ) ( ) ( )∆H j H j H j
H H H H
H H H H
m m
l l lm lm
ω ω ω= − =− −
− −
$
$ . $
. . .$ . $
11 11 1 1
1 1
( )∆H jω se déduit de l’équation ( 2-19) page 22 telle que :
( ) [ ]∆H j C CsI
sI
A
A
B
Bω = − ⋅
−
⋅
−
$$ $0
00
0
1
( 4-3)
31 SV pour « Singular Value ».
Recombinaison de plusieurs représentations d'état - 4.2 59/142
Pour une série de tests, seule la courbe enveloppe maximale de l’erreur d’exactitude est rapportée sans qu’il soit fait cas ni du minimum ni de la moyenne de cette même erreur. L’objectif étant de se donner une idée du risque majeur tout en s’affranchissant du même coup de l’erreur de consistance.
L’erreur d’exactitude est graphiquement comparée à la valeur singulière maximum de la fonction de transfert vraie.
4.2.1.2.Erreur de consistance
L’évaluation de la consistance s’applique à calculer, pour chaque test, l’écart type de l’erreur de prédiction sur les sorties ( )σ y test . En d’autres termes, le calcul de l’erreur est effectué entre les signaux de sorties vrais $y et
ceux reconstitués - y - à partir de la représentation identifiée.
Outre l’information à proprement parlé de la consistance (variation de l’erreur), on introduit l’écart type moyen pour chacune des sorties considérées σ y moy . En effet, cette dernière fournit un indice de qualité de
l’identification au même titre que l’erreur d’exactitude développée ci avant.
4.2.2.Hypothèses et méthodologie générale Etant donné que l’une des raisons, pour laquelle ces trois méthodes sont proposées, est de pouvoir en dernier
lieu identifier les matrices physiques, les simulations proposées s’attachent donc toutes à reconstituer au final une
représentation d’état disposant de toutes les sorties - avec n lid = - (conditions sine qua non pour précisément identifier dans un deuxième temps les matrices physiques de masses, raideurs et amortissements).
Pour les trois méthodes, les calculs sont « poussés » jusqu'à l’obtention des matrices physiques. En revanche, pour cette deuxième phase de l’identification, la matrice masse M est supposée complètement connue. L’évaluation numérique spécifique au processus d’identification autonome de la matrice masse est réalisée précédemment dans la section 4.1.
A noter que, dans la pratique, cette hypothèse - la matrice masse connue - est réaliste dans le cadre de structures spatiales par construction fortement discrétisées. Il est, en effet, aisé de considérer en première analyse les liaisons entres les barres et les câbles comme les nœuds du système dynamique équivalent. On peut espérer une absence de variation de celles-ci au cours du temps et leur valeur peut se déterminer par des méthodes classiques de répartition (masses concentrées ou masses réparties).
En outre, la structure relationnelle de telles structures se déduit trivialement de la structure réelle par la simple analyse des relations entre les éléments constitutifs.
Enfin, chacune des deux identifications partielles utilise systématiquement un jeu de signaux différents afin de simuler de manière adéquate des campagnes de mesures successives.
En outre les hypothèses suivantes sont posées :
- 1ère hypothèse : le déplacement des excitateurs et capteurs à chacune des acquisitions n’influe pas sur les propriétés physiques (répartition des masses en particulier) de la structure. De fait, au cours des différentes simulations, la matrice masse M est considérée constante.
- 2ème hypothèse : la structure est suffisamment stable dans le temps pour permettre la non simultanéité des identifications partielles.
A chaque fois que cela est nécessaire pour la complète évaluation des résultats, un calcul de référence spécifique est présenté parmi les simulations envisagées ; ce dernier ne mettant en œuvre que la capacité intrinsèque des deux algorithmes utilisés Moesp et N4sidr sans faire intervenir la méthode de recombinaison

60/142 4 - Simulations numériques
étudiée (identification directe). La totalité des sorties y est systématiquement employée avec seulement la ou les entrées utiles.
4.2.3.Méthode n°1 : usage d’une base commune quelconque
Afin de générer une succession de simulations pour lesquelles le ou les paramètres variables restent les plus identifiables, l’entrée u2 est retenue comme l’entrée de référence de part sa position numérique centrale. C’est
naturellement que les deux paramètres intéressant l’étude sont le nombre d’entrées et le nombre de sorties (les modes étant fixés) ainsi que leurs diverses combinaisons possibles. La série de simulations - retenue pour cette étude - faisant varier successivement ces deux paramètres est récapitulée dans le Tableau 4-4 suivant :
◊ Le nombre de sorties y après recombinaison est toujours complet (4 sorties) afin de permettre subséquemment l’identification des matrices physiques.
◊ Le nombre d’entrées pour chacune des deux identifications ainsi que le nombre d’entrées communes suivent une progression ascendante.
◊ Le nombre d’entrées ou de sorties communes suit aussi une progression ascendante.
◊ S 0 est la simulation de référence ; elle ne fait pas intervenir de processus de ré association.
N° de Identification n°1 Identification n°2 Entrées u et sorties y
Entrées u
après
Entrées u et sorties y
simulation ui y i ui y i communes recom-binaison
transférées Commentaires32
S 0 u2 y1 y2 y3 y4
- - - u2 - Identification directe sans recombinaison servant de référence.
S 1 u2 y1 y2
u2 y2 y3 y4
u2 y2
u2 - y3 - y4
1 entrée commune/1 + 1 sortie commune identique à l’entrée (le minimum).
S 2 u2 y2 y3 y4
u2 y1 y2
u2 y2
u2 - y1
Inverse.
S 3 u2 y1 y2 y3
u2 y2 y3 y4
u2 y2 - y3
u2 - y4
1 entrée commune/1 + 2 sorties communes dont 1 identique à l’entrée.
S 4 u1 u2
y1 y2
u2 u3
y2 y3 y4
u2 y2
u1 u2 u3
u3 y3 - y4
1 entrée commune/2 + 1 sortie commune identique à l’entrée.
S 5 u1 u2
y2 y3 y4
u2 u3
y1 y2
u2 y2
u1 u2 u3
u3 y1
Inversion des sorties/précédente simulation.
S 6 u1 u2
y1 y2 y3
u2 u3
y2 y3 y4
u2 y2 - y3
u1 u2 u3
u3 y4
1 entrée commune/2 + 2 sorties communes dont 1 identique à l’entrée.
S 7 u2 u3
y1 y2
u2 u3
y2 y3 y4
u2 - u3 y2
u2 u3
- y3 - y4
2 entrées communes/2 + 1 sortie commune dont 1 identique aux entrées.
S 8 u2 u3
y1 y2 y3
u2 u3
y2 y3 y4
u2 - u3 y2 - y3
u2 u3
- y4
2 entrées communes/2 + 2 sorties communes identiques aux entrées.
32 Le signe / signifie « sur » : 1 entrée/2 : 1 entrée sur 2.
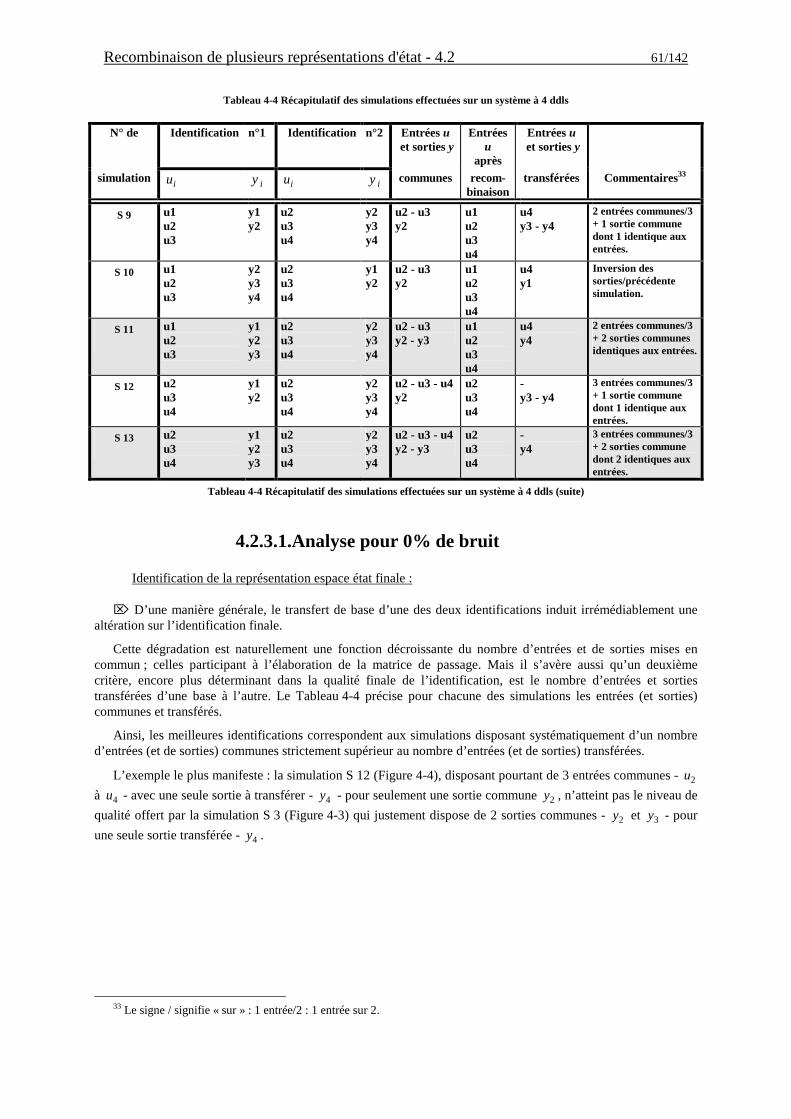
Recombinaison de plusieurs représentations d'état - 4.2 61/142
Tableau 4-4 Récapitulatif des simulations effectuées sur un système à 4 ddls
N° de Identification n°1 Identification n°2 Entrées u et sorties y
Entrées u
après
Entrées u et sorties y
simulation ui y i ui y i communes recom-binaison
transférées Commentaires33
S 9 u1 u2 u3
y1 y2
u2 u3 u4
y2 y3 y4
u2 - u3 y2
u1 u2 u3 u4
u4 y3 - y4
2 entrées communes/3 + 1 sortie commune dont 1 identique aux entrées.
S 10 u1 u2 u3
y2 y3 y4
u2 u3 u4
y1 y2
u2 - u3 y2
u1 u2 u3 u4
u4 y1
Inversion des sorties/précédente simulation.
S 11 u1 u2 u3
y1 y2 y3
u2 u3 u4
y2 y3 y4
u2 - u3 y2 - y3
u1 u2 u3 u4
u4 y4
2 entrées communes/3 + 2 sorties communes identiques aux entrées.
S 12 u2 u3 u4
y1 y2
u2 u3 u4
y2 y3 y4
u2 - u3 - u4 y2
u2 u3 u4
- y3 - y4
3 entrées communes/3 + 1 sortie commune dont 1 identique aux entrées.
S 13 u2 u3 u4
y1 y2 y3
u2 u3 u4
y2 y3 y4
u2 - u3 - u4 y2 - y3
u2 u3 u4
- y4
3 entrées communes/3 + 2 sorties commune dont 2 identiques aux entrées.
Tableau 4-4 Récapitulatif des simulations effectuées sur un système à 4 ddls (suite)
4.2.3.1.Analyse pour 0% de bruit
Identification de la représentation espace état finale :
D’une manière générale, le transfert de base d’une des deux identifications induit irrémédiablement une altération sur l’identification finale.
Cette dégradation est naturellement une fonction décroissante du nombre d’entrées et de sorties mises en commun ; celles participant à l’élaboration de la matrice de passage. Mais il s’avère aussi qu’un deuxième critère, encore plus déterminant dans la qualité finale de l’identification, est le nombre d’entrées et sorties transférées d’une base à l’autre. Le Tableau 4-4 précise pour chacune des simulations les entrées (et sorties) communes et transférés.
Ainsi, les meilleures identifications correspondent aux simulations disposant systématiquement d’un nombre d’entrées (et de sorties) communes strictement supérieur au nombre d’entrées (et de sorties) transférées.
L’exemple le plus manifeste : la simulation S 12 (Figure 4-4), disposant pourtant de 3 entrées communes - u2
à u4 - avec une seule sortie à transférer - y4 - pour seulement une sortie commune y2 , n’atteint pas le niveau de
qualité offert par la simulation S 3 (Figure 4-3) qui justement dispose de 2 sorties communes - y2 et y3 - pour
une seule sortie transférée - y4 .
33 Le signe / signifie « sur » : 1 entrée/2 : 1 entrée sur 2.
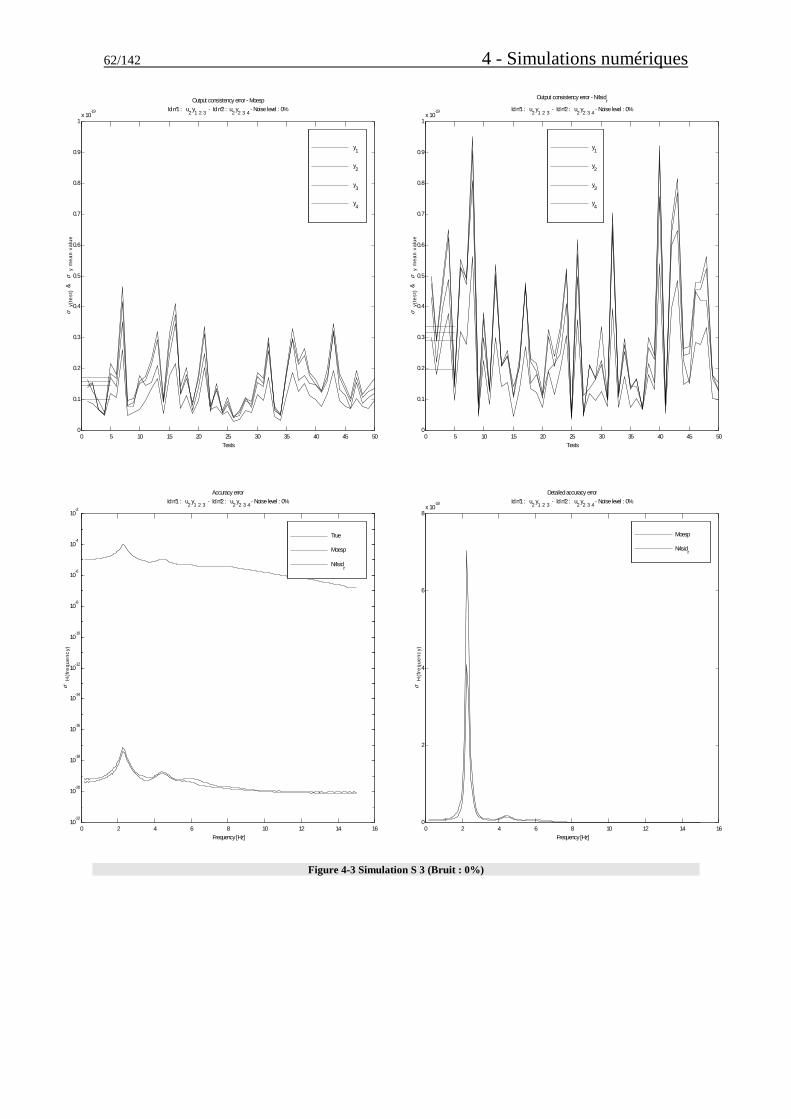
62/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-19
Output consistency error - MoespId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-19
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-22
10-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6
8x 10
-18
Detailed accuracy errorId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-3 Simulation S 3 (Bruit : 0%)
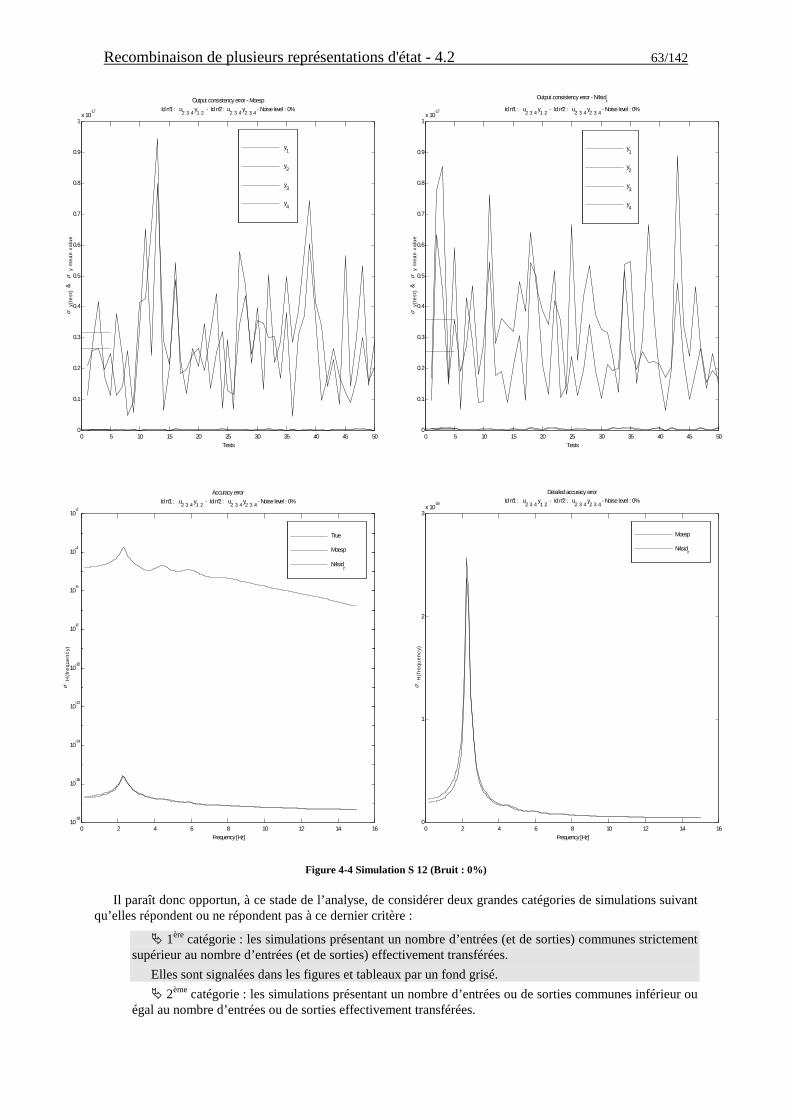
Recombinaison de plusieurs représentations d'état - 4.2 63/142
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-17
Output consistency error - MoespId n°1 : u
2 3 4 y
1 2 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-17
Output consistency error - N4sidr
Id n°1 : u2 3 4
y1 2
- Id n°2 : u2 3 4
y2 3 4
- Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
2 3 4 y
1 2 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
1
2
3x 10
-16
Detailed accuracy errorId n°1 : u
2 3 4 y
1 2 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-4 Simulation S 12 (Bruit : 0%)
Il paraît donc opportun, à ce stade de l’analyse, de considérer deux grandes catégories de simulations suivant qu’elles répondent ou ne répondent pas à ce dernier critère :
� 1ère catégorie : les simulations présentant un nombre d’entrées (et de sorties) communes strictement supérieur au nombre d’entrées (et de sorties) effectivement transférées.
Elles sont signalées dans les figures et tableaux par un fond grisé.
� 2ème catégorie : les simulations présentant un nombre d’entrées ou de sorties communes inférieur ou égal au nombre d’entrées ou de sorties effectivement transférées.

64/142 4 - Simulations numériques
Ainsi, dans le cadre du modèle à 4 degrés de liberté étudié, les taux d’erreur de la 2ème catégorie sont invariablement dans un rapport 100 fois supérieur à ceux de la première catégorie (cf. Tableau 4-5).
1ère catégorie 2ème catégorie S 0
σ y moy 10 20− 10 18− 10 20−
( )σ ωH 10 18− 10 16− 10 18−
Tableau 4-5 Evaluation comparative niveaux d’erreur versus catégorie (Bruit : 0%)
A titre de comparaison sont aussi rappelés dans le Tableau 4-5 les résultats de la simulation de référence S 0. Ces derniers mettent comparativement en valeur l'efficience des simulations avec recombinaison de première catégorie (les ordres de grandeurs sont équivalents).
La prééminence de l’algorithme Moesp sur l’algorithme N4sidr est certaine lorsque l’on s’intéresse aux simulations les plus performantes, c'est à dire à celles appartenant à la première catégorie. Cette constatation est visible avec la Figure 4-3 :
◊ d’une part avec σ y moy qui présente un rapport N4sidr versus Moesp généralement autour de 2, et avec
( )σ y test affichant une moins bonne consistance d'ensemble pour l’algorithme N4sidr.
◊ d’autre part avec ( )σ ωH qui distingue clairement l'efficience de chacun au premier mode.
Cette supériorité de l’algorithme Moesp sur l’algorithme N4sidr se retrouve aussi sur la simulation S 0 de référence (cf. Figure 4-5).
En revanche, les simulations de la deuxième catégorie n’offrent plus du tout ce caractère : il n’est plus possible de distinguer une prédominance nette et permanente d’un des algorithmes sur l’autre quelle que soit l’analyse qui en est faite : consistance ( )σ y test ou exactitude ( )σ ωH (cf. Figure 4-4). Il semble que le taux
d’erreur provoquée par le processus de recombinaison soit à l’origine de cette absence de distinction.
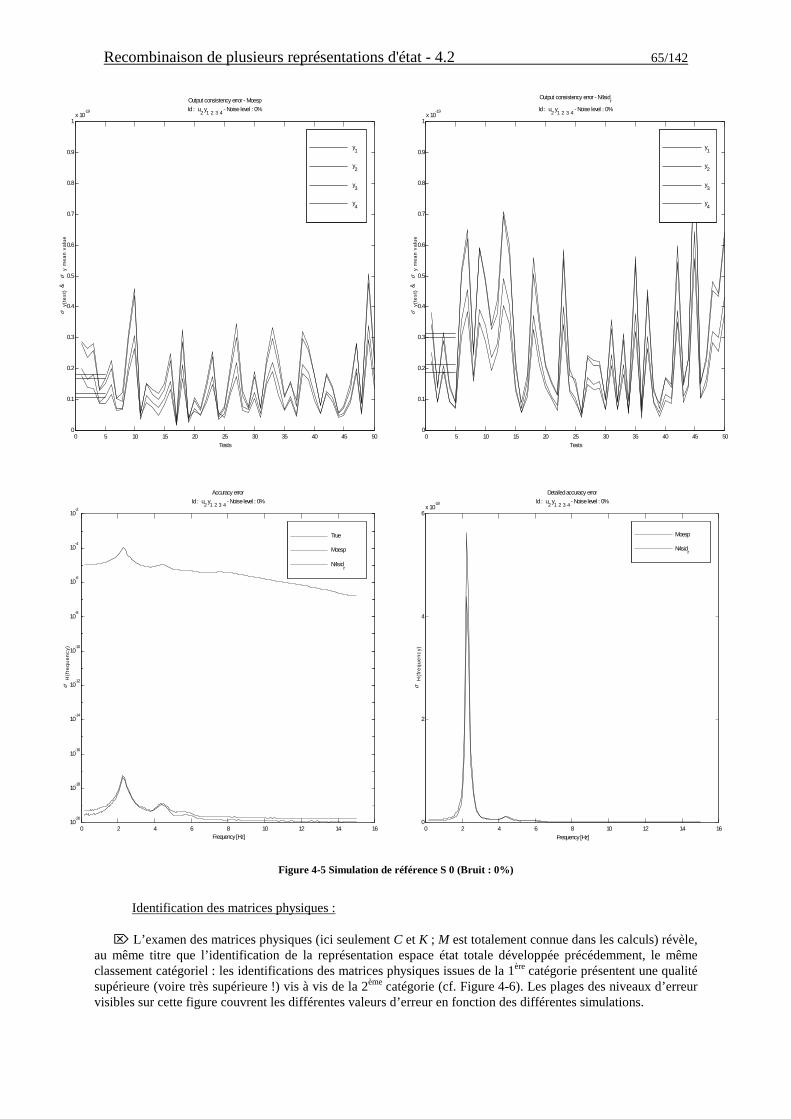
Recombinaison de plusieurs représentations d'état - 4.2 65/142
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-19
Output consistency error - MoespId : u
2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-19
Output consistency error - N4sidr
Id : u2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6x 10
-18
Detailed accuracy errorId : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-5 Simulation de référence S 0 (Bruit : 0%)
Identification des matrices physiques :
L’examen des matrices physiques (ici seulement C et K ; M est totalement connue dans les calculs) révèle, au même titre que l’identification de la représentation espace état totale développée précédemment, le même classement catégoriel : les identifications des matrices physiques issues de la 1ère catégorie présentent une qualité supérieure (voire très supérieure !) vis à vis de la 2ème catégorie (cf. Figure 4-6). Les plages des niveaux d’erreur visibles sur cette figure couvrent les différentes valeurs d’erreur en fonction des différentes simulations.
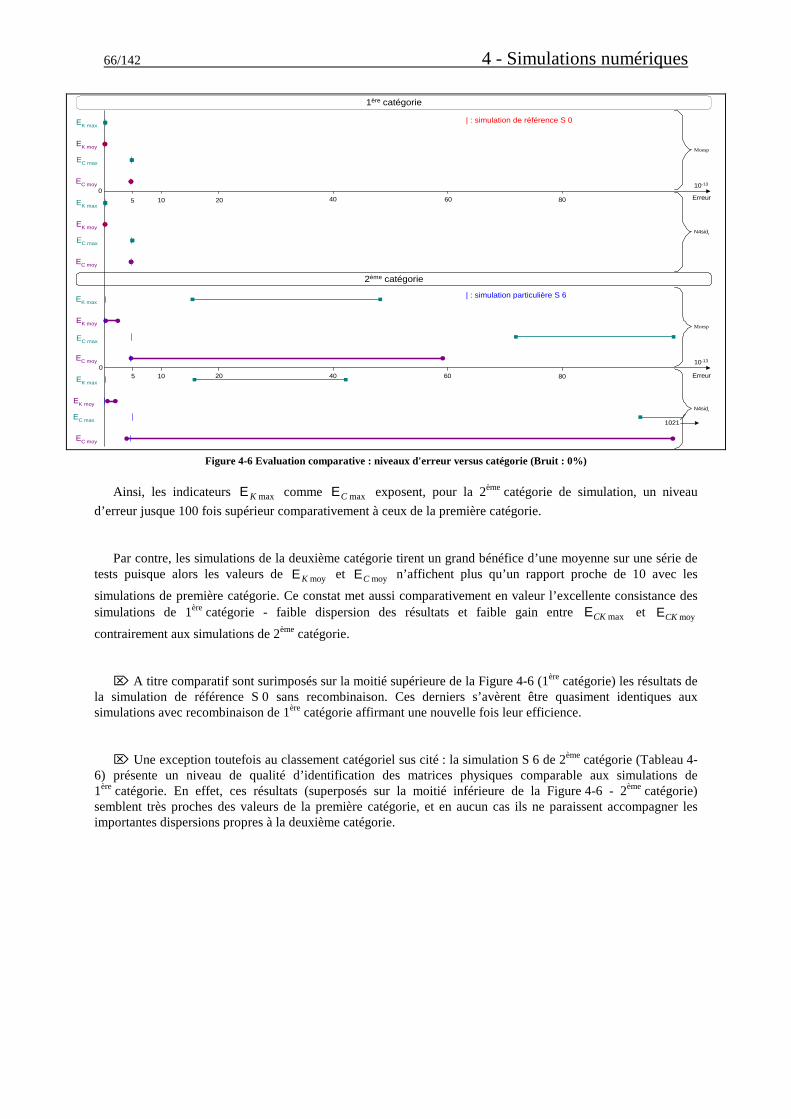
66/142 4 - Simulations numériques
Moesp
Moesp
N4sidr
N4sidr
EK max
EK max
EK max
EK max
EK moy
EK moy
EK moy
EK moy
EC moy
EC moy
EC moy
EC moy
EC max
EC max
EC max
EC max
10-13
Erreur
Erreur
10-13
0
0
10 20 40 60 80
8060402010
1021
5
5
2ème catégorie
1ère catégorie
| : simulation de référence S 0
| : simulation particulière S 6
Figure 4-6 Evaluation comparative : niveaux d'erreur versus catégorie (Bruit : 0%)
Ainsi, les indicateurs Ε K max comme Ε C max exposent, pour la 2ème catégorie de simulation, un niveau
d’erreur jusque 100 fois supérieur comparativement à ceux de la première catégorie.
Par contre, les simulations de la deuxième catégorie tirent un grand bénéfice d’une moyenne sur une série de tests puisque alors les valeurs de Ε K moy et Ε C moy n’affichent plus qu’un rapport proche de 10 avec les
simulations de première catégorie. Ce constat met aussi comparativement en valeur l’excellente consistance des simulations de 1ère catégorie - faible dispersion des résultats et faible gain entre ΕCK max et ΕCK moy
contrairement aux simulations de 2ème catégorie.
A titre comparatif sont surimposés sur la moitié supérieure de la Figure 4-6 (1ère catégorie) les résultats de la simulation de référence S 0 sans recombinaison. Ces derniers s’avèrent être quasiment identiques aux simulations avec recombinaison de 1ère catégorie affirmant une nouvelle fois leur efficience.
Une exception toutefois au classement catégoriel sus cité : la simulation S 6 de 2ème catégorie (Tableau 4-6) présente un niveau de qualité d’identification des matrices physiques comparable aux simulations de 1ère catégorie. En effet, ces résultats (superposés sur la moitié inférieure de la Figure 4-6 - 2ème catégorie) semblent très proches des valeurs de la première catégorie, et en aucun cas ils ne paraissent accompagner les importantes dispersions propres à la deuxième catégorie.
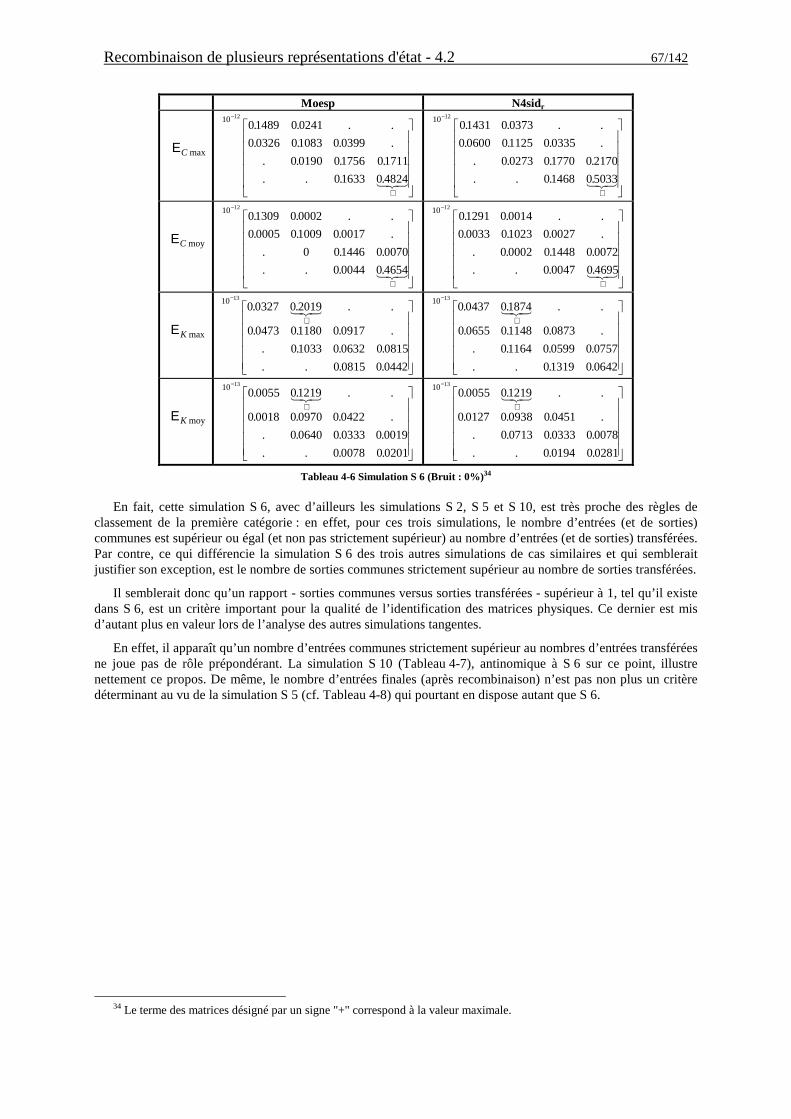
Recombinaison de plusieurs représentations d'état - 4.2 67/142
Moesp N4sidr
ΕC max
10 12
01489 0 0241
0 0326 01083 0 0399
0 0190 01756 01711
01633 0 4824
−
+
. . . .
. . . .
. . . .
. . . .123
10 12
01431 0 0373
0 0600 01125 0 0335
0 0273 01770 0 2170
01468 05033
−
+
. . . .
. . . .
. . . .
. . . .123
ΕC moy
10 12
01309 0 0002
0 0005 01009 0 0017
0 01446 0 0070
0 0044 0 4654
−
+
. . . .
. . . .
. . .
. . . .123
10 12
01291 0 0014
0 0033 01023 0 0027
0 0002 01448 0 0072
0 0047 0 4695
−
+
. . . .
. . . .
. . . .
. . . .123
Ε K max
10 13
0 0327 0 2019
0 0473 01180 0 0917
01033 0 0632 0 0815
0 0815 0 0442
−
+
. . . .
. . . .
. . . .
. . . .
123
10 13
0 0437 01874
0 0655 01148 0 0873
01164 0 0599 0 0757
01319 0 0642
−
+
. . . .
. . . .
. . . .
. . . .
123
Ε K moy
10 13
0 0055 01219
0 0018 0 0970 0 0422
0 0640 0 0333 0 0019
0 0078 0 0201
−
+
. . . .
. . . .
. . . .
. . . .
123
10 13
0 0055 01219
0 0127 0 0938 0 0451
0 0713 0 0333 0 0078
0 0194 0 0281
−
+
. . . .
. . . .
. . . .
. . . .
123
Tableau 4-6 Simulation S 6 (Bruit : 0%)34
En fait, cette simulation S 6, avec d’ailleurs les simulations S 2, S 5 et S 10, est très proche des règles de classement de la première catégorie : en effet, pour ces trois simulations, le nombre d’entrées (et de sorties) communes est supérieur ou égal (et non pas strictement supérieur) au nombre d’entrées (et de sorties) transférées. Par contre, ce qui différencie la simulation S 6 des trois autres simulations de cas similaires et qui semblerait justifier son exception, est le nombre de sorties communes strictement supérieur au nombre de sorties transférées.
Il semblerait donc qu’un rapport - sorties communes versus sorties transférées - supérieur à 1, tel qu’il existe dans S 6, est un critère important pour la qualité de l’identification des matrices physiques. Ce dernier est mis d’autant plus en valeur lors de l’analyse des autres simulations tangentes.
En effet, il apparaît qu’un nombre d’entrées communes strictement supérieur au nombres d’entrées transférées ne joue pas de rôle prépondérant. La simulation S 10 (Tableau 4-7), antinomique à S 6 sur ce point, illustre nettement ce propos. De même, le nombre d’entrées finales (après recombinaison) n’est pas non plus un critère déterminant au vu de la simulation S 5 (cf. Tableau 4-8) qui pourtant en dispose autant que S 6.
34 Le terme des matrices désigné par un signe "+" correspond à la valeur maximale.
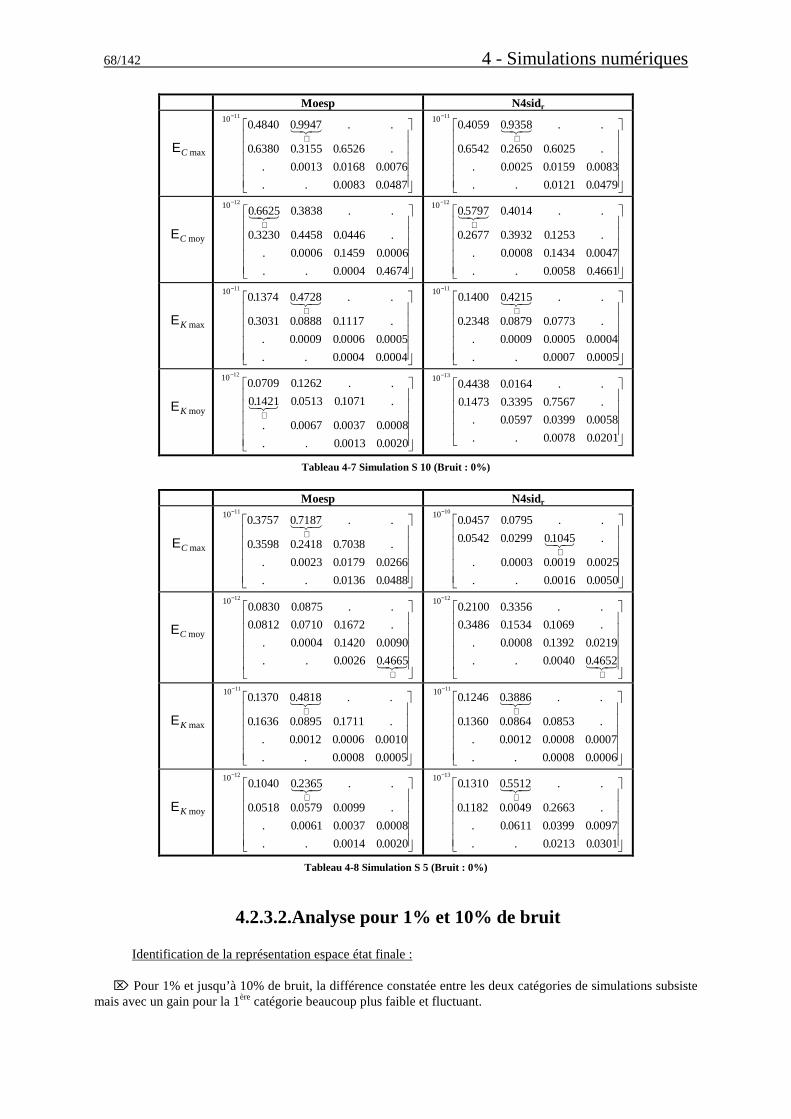
68/142 4 - Simulations numériques
Moesp N4sidr
ΕC max
10 11
0 4840 0 9947
0 6380 0 3155 0 6526
0 0013 0 0168 0 0076
0 0083 0 0487
−
+
. . . .
. . . .
. . . .
. . . .
123
10 11
0 4059 0 9358
0 6542 0 2650 0 6025
0 0025 0 0159 0 0083
0 0121 0 0479
−
+
. . . .
. . . .
. . . .
. . . .
123
ΕC moy
10 12
0 6625 0 3838
0 3230 0 4458 0 0446
0 0006 01459 0 0006
0 0004 0 4674
−
+
. . . .
. . . .
. . . .
. . . .
123
10 12
05797 0 4014
0 2677 0 3932 01253
0 0008 01434 0 0047
0 0058 0 4661
−
+
. . . .
. . . .
. . . .
. . . .
123
Ε K max
10 11
01374 0 4728
0 3031 0 0888 01117
0 0009 0 0006 0 0005
0 0004 0 0004
−
+
. . . .
. . . .
. . . .
. . . .
123
10 11
01400 0 4215
0 2348 0 0879 0 0773
0 0009 0 0005 0 0004
0 0007 0 0005
−
+
. . . .
. . . .
. . . .
. . . .
123
Ε K moy
10 12
0 0709 01262
01421 0 0513 01071
0 0067 0 0037 0 0008
0 0013 0 0020
−
+
. . . .
. . . .
. . . .
. . . .
123
10 13
0 4438 0 0164
01473 0 3395 0 7567
0 0597 0 0399 0 0058
0 0078 0 0201
−
. . . .
. . . .
. . . .
. . . .
Tableau 4-7 Simulation S 10 (Bruit : 0%)
Moesp N4sidr
ΕC max
10 11
0 3757 0 7187
0 3598 0 2418 0 7038
0 0023 0 0179 0 0266
0 0136 0 0488
−
+
. . . .
. . . .
. . . .
. . . .
123
10 10
0 0457 0 0795
0 0542 0 0299 01045
0 0003 0 0019 0 0025
0 0016 0 0050
−
+
. . . .
. . . .
. . . .
. . . .
123
ΕC moy
10 12
0 0830 0 0875
0 0812 0 0710 01672
0 0004 01420 0 0090
0 0026 0 4665
−
+
. . . .
. . . .
. . . .
. . . .123
10 12
0 2100 0 3356
0 3486 01534 01069
0 0008 01392 0 0219
0 0040 0 4652
−
+
. . . .
. . . .
. . . .
. . . .123
Ε K max
10 11
01370 0 4818
01636 0 0895 01711
0 0012 0 0006 0 0010
0 0008 0 0005
−
+
. . . .
. . . .
. . . .
. . . .
123
10 11
01246 0 3886
01360 0 0864 0 0853
0 0012 0 0008 0 0007
0 0008 0 0006
−
+
. . . .
. . . .
. . . .
. . . .
123
Ε K moy
10 12
01040 0 2365
0 0518 0 0579 0 0099
0 0061 0 0037 0 0008
0 0014 0 0020
−
+
. . . .
. . . .
. . . .
. . . .
123
10 13
01310 05512
01182 0 0049 0 2663
0 0611 0 0399 0 0097
0 0213 0 0301
−
+
. . . .
. . . .
. . . .
. . . .
123
Tableau 4-8 Simulation S 5 (Bruit : 0%)
4.2.3.2.Analyse pour 1% et 10% de bruit
Identification de la représentation espace état finale :
Pour 1% et jusqu’à 10% de bruit, la différence constatée entre les deux catégories de simulations subsiste mais avec un gain pour la 1ère catégorie beaucoup plus faible et fluctuant.
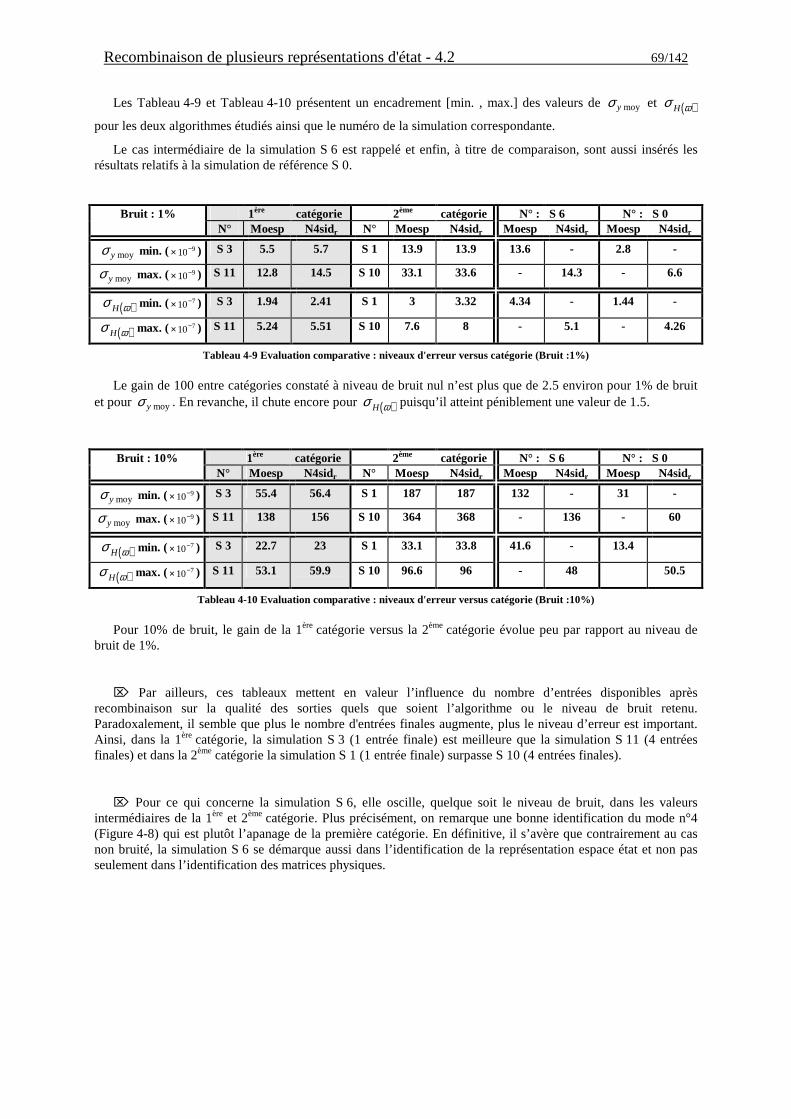
Recombinaison de plusieurs représentations d'état - 4.2 69/142
Les Tableau 4-9 et Tableau 4-10 présentent un encadrement [min. , max.] des valeurs de σ y moy et ( )σ ωH
pour les deux algorithmes étudiés ainsi que le numéro de la simulation correspondante.
Le cas intermédiaire de la simulation S 6 est rappelé et enfin, à titre de comparaison, sont aussi insérés les résultats relatifs à la simulation de référence S 0.
Bruit : 1% 1ère catégorie 2ème catégorie N° : S 6 N° : S 0 N° Moesp N4sidr N° Moesp N4sidr Moesp N4sidr Moesp N4sidr
σ y moy min. (× −10 9 ) S 3 5.5 5.7 S 1 13.9 13.9 13.6 - 2.8 -
σ y moy max. (× −10 9 ) S 11 12.8 14.5 S 10 33.1 33.6 - 14.3 - 6.6
( )σ ωH min. (× −10 7 ) S 3 1.94 2.41 S 1 3 3.32 4.34 - 1.44 -
( )σ ωH max. (× −10 7 ) S 11 5.24 5.51 S 10 7.6 8 - 5.1 - 4.26
Tableau 4-9 Evaluation comparative : niveaux d'erreur versus catégorie (Bruit :1%)
Le gain de 100 entre catégories constaté à niveau de bruit nul n’est plus que de 2.5 environ pour 1% de bruit et pour σ y moy . En revanche, il chute encore pour ( )σ ωH puisqu’il atteint péniblement une valeur de 1.5.
Bruit : 10% 1ère catégorie 2ème catégorie N° : S 6 N° : S 0 N° Moesp N4sidr N° Moesp N4sidr Moesp N4sidr Moesp N4sidr
σ y moy min. (× −10 9 ) S 3 55.4 56.4 S 1 187 187 132 - 31 -
σ y moy max. (× −10 9 ) S 11 138 156 S 10 364 368 - 136 - 60
( )σ ωH min. (× −10 7 ) S 3 22.7 23 S 1 33.1 33.8 41.6 - 13.4
( )σ ωH max. (× −10 7 ) S 11 53.1 59.9 S 10 96.6 96 - 48 50.5
Tableau 4-10 Evaluation comparative : niveaux d'erreur versus catégorie (Bruit :10%)
Pour 10% de bruit, le gain de la 1ère catégorie versus la 2ème catégorie évolue peu par rapport au niveau de bruit de 1%.
Par ailleurs, ces tableaux mettent en valeur l’influence du nombre d’entrées disponibles après recombinaison sur la qualité des sorties quels que soient l’algorithme ou le niveau de bruit retenu. Paradoxalement, il semble que plus le nombre d'entrées finales augmente, plus le niveau d’erreur est important. Ainsi, dans la 1ère catégorie, la simulation S 3 (1 entrée finale) est meilleure que la simulation S 11 (4 entrées finales) et dans la 2ème catégorie la simulation S 1 (1 entrée finale) surpasse S 10 (4 entrées finales).
Pour ce qui concerne la simulation S 6, elle oscille, quelque soit le niveau de bruit, dans les valeurs intermédiaires de la 1ère et 2ème catégorie. Plus précisément, on remarque une bonne identification du mode n°4 (Figure 4-8) qui est plutôt l’apanage de la première catégorie. En définitive, il s’avère que contrairement au cas non bruité, la simulation S 6 se démarque aussi dans l’identification de la représentation espace état et non pas seulement dans l’identification des matrices physiques.
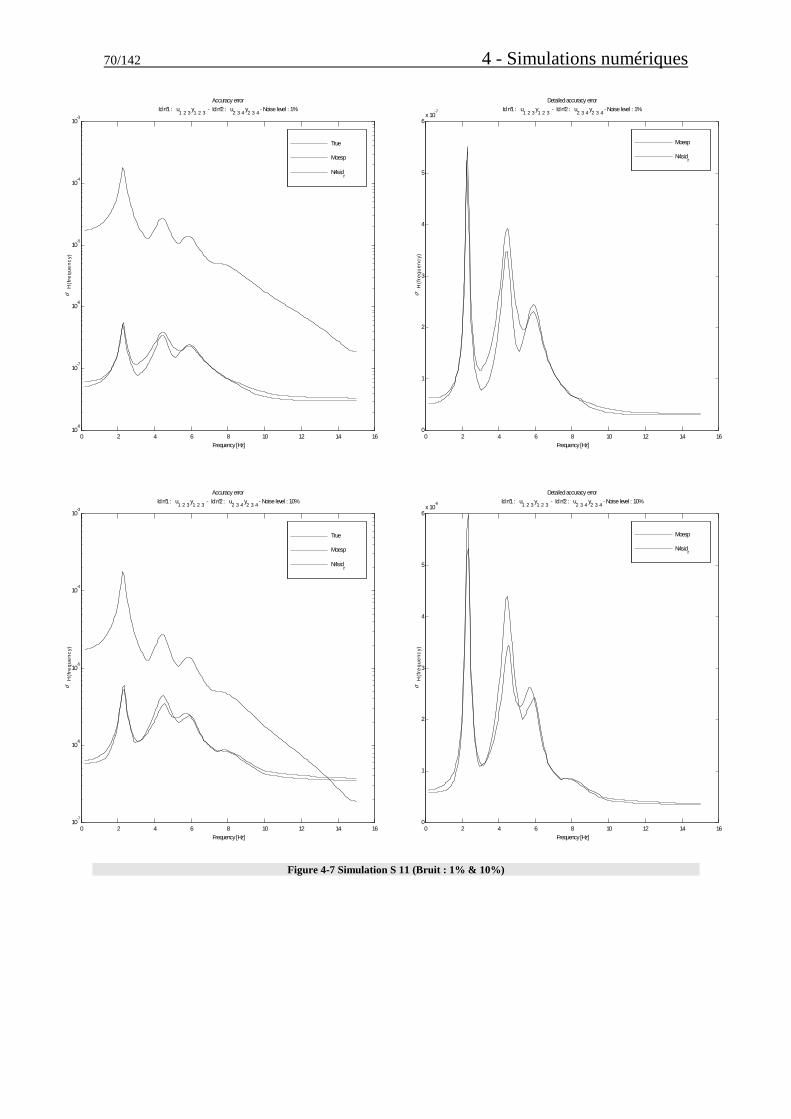
70/142 4 - Simulations numériques
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6x 10
-7
Detailed accuracy errorId n°1 : u
1 2 3 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6x 10
-6
Detailed accuracy errorId n°1 : u
1 2 3 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-7 Simulation S 11 (Bruit : 1% & 10%)

Recombinaison de plusieurs représentations d'état - 4.2 71/142
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 y
1 2 3 - Id n°2 : u
2 3 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 y
1 2 3 - Id n°2 : u
2 3 y
2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
Figure 4-8 Simulation S 6 (Bruit : 1%& 10%)
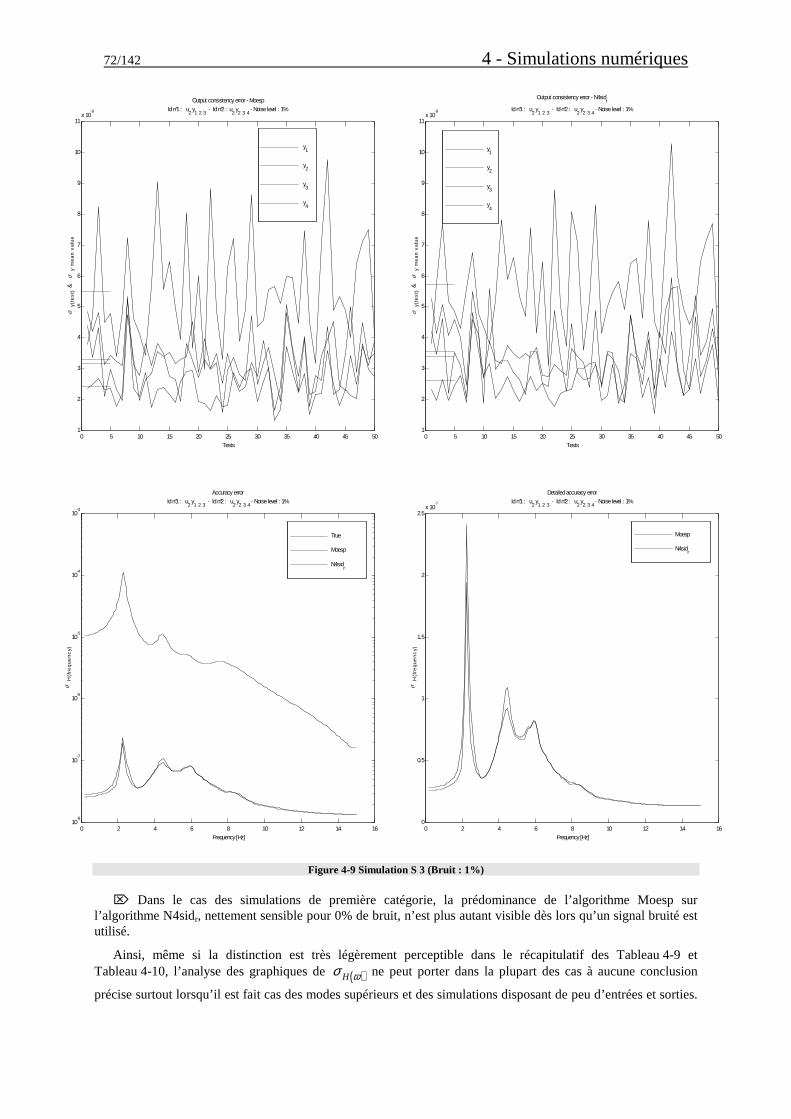
72/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 501
2
3
4
5
6
7
8
9
10
11x 10
-9
Output consistency error - MoespId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 1%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 501
2
3
4
5
6
7
8
9
10
11x 10
-9
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 1%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5x 10
-7
Detailed accuracy errorId n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-9 Simulation S 3 (Bruit : 1%)
Dans le cas des simulations de première catégorie, la prédominance de l’algorithme Moesp sur l’algorithme N4sidr, nettement sensible pour 0% de bruit, n’est plus autant visible dès lors qu’un signal bruité est utilisé.
Ainsi, même si la distinction est très légèrement perceptible dans le récapitulatif des Tableau 4-9 et Tableau 4-10, l’analyse des graphiques de ( )σ ωH ne peut porter dans la plupart des cas à aucune conclusion
précise surtout lorsqu’il est fait cas des modes supérieurs et des simulations disposant de peu d’entrées et sorties.
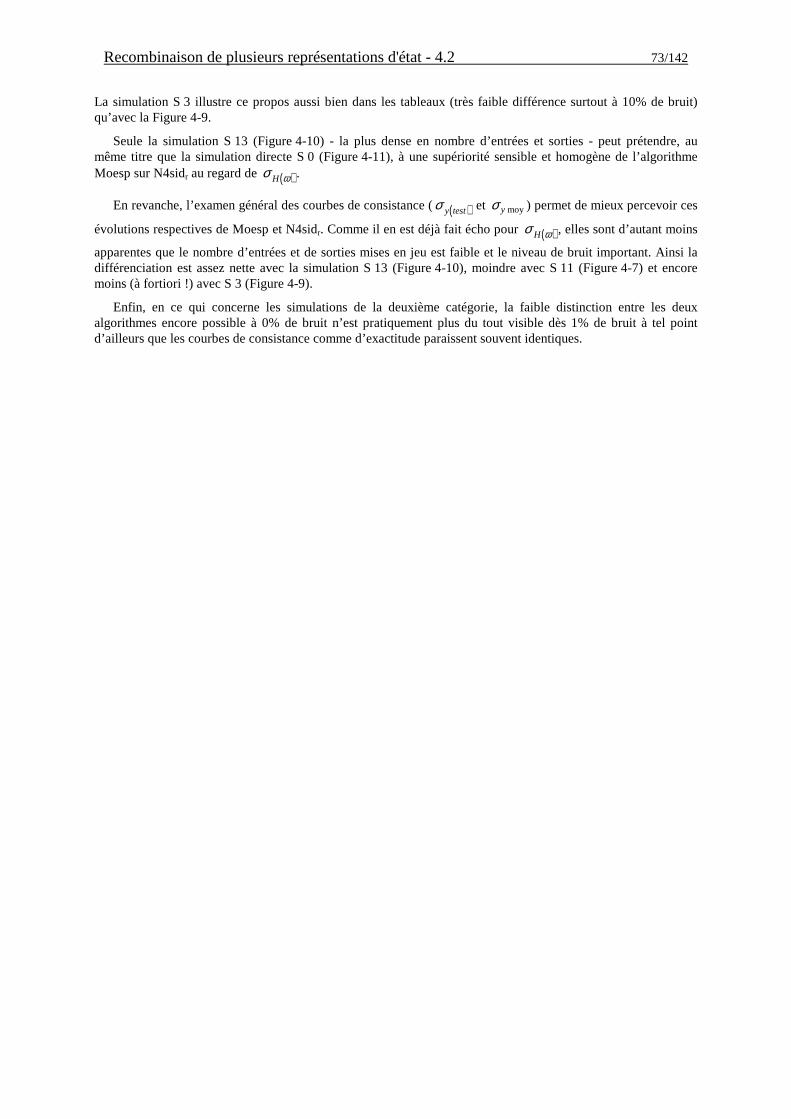
Recombinaison de plusieurs représentations d'état - 4.2 73/142
La simulation S 3 illustre ce propos aussi bien dans les tableaux (très faible différence surtout à 10% de bruit) qu’avec la Figure 4-9.
Seule la simulation S 13 (Figure 4-10) - la plus dense en nombre d’entrées et sorties - peut prétendre, au même titre que la simulation directe S 0 (Figure 4-11), à une supériorité sensible et homogène de l’algorithme Moesp sur N4sidr au regard de ( )σ ωH .
En revanche, l’examen général des courbes de consistance ( ( )σ y test et σ y moy) permet de mieux percevoir ces
évolutions respectives de Moesp et N4sidr. Comme il en est déjà fait écho pour ( )σ ωH , elles sont d’autant moins
apparentes que le nombre d’entrées et de sorties mises en jeu est faible et le niveau de bruit important. Ainsi la différenciation est assez nette avec la simulation S 13 (Figure 4-10), moindre avec S 11 (Figure 4-7) et encore moins (à fortiori !) avec S 3 (Figure 4-9).
Enfin, en ce qui concerne les simulations de la deuxième catégorie, la faible distinction entre les deux algorithmes encore possible à 0% de bruit n’est pratiquement plus du tout visible dès 1% de bruit à tel point d’ailleurs que les courbes de consistance comme d’exactitude paraissent souvent identiques.
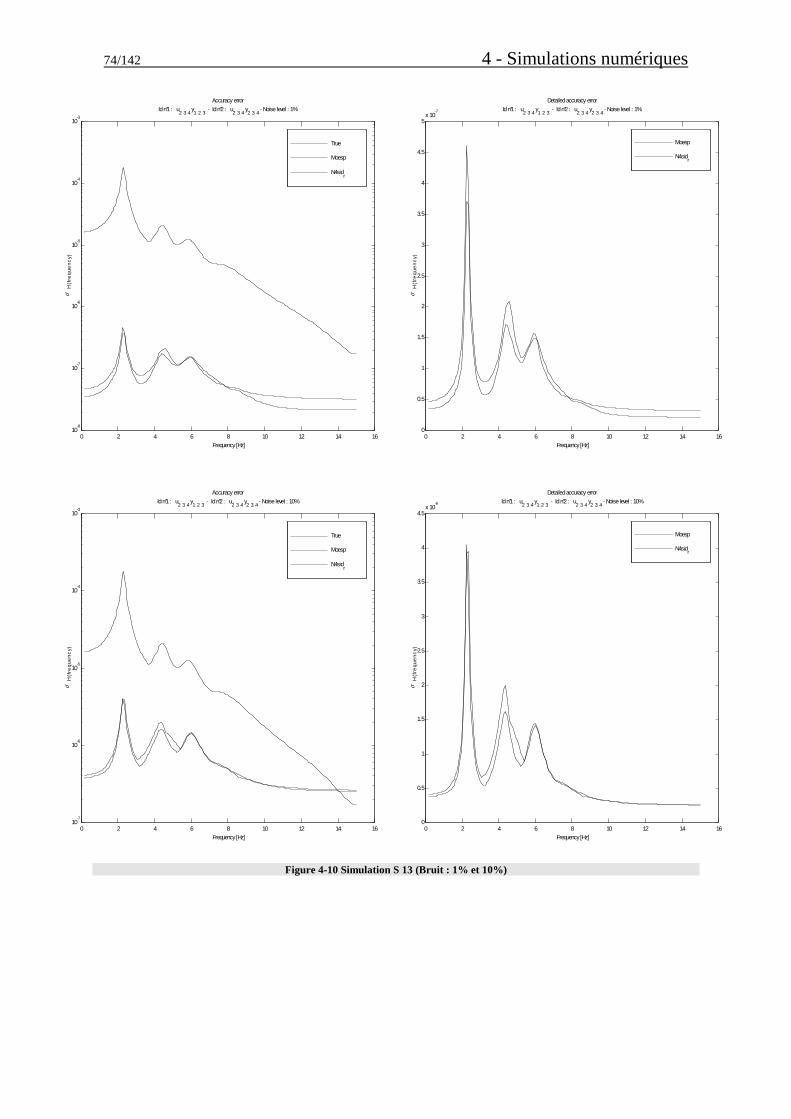
74/142 4 - Simulations numériques
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 3 4 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-7
Detailed accuracy errorId n°1 : u
2 3 4 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 3 4 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-6
Detailed accuracy errorId n°1 : u
2 3 4 y
1 2 3 - Id n°2 : u
2 3 4 y
2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-10 Simulation S 13 (Bruit : 1% et 10%)
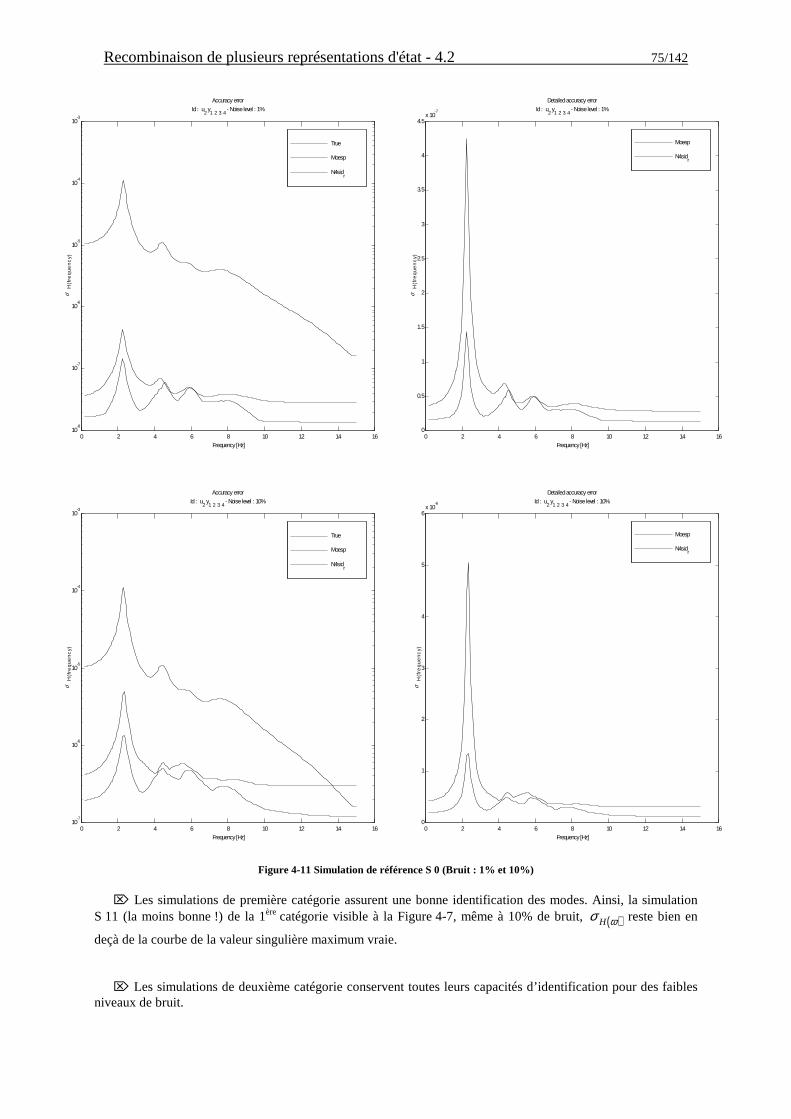
Recombinaison de plusieurs représentations d'état - 4.2 75/142
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId : u
2 y
1 2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-7
Detailed accuracy errorId : u
2 y
1 2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId : u
2 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6x 10
-6
Detailed accuracy errorId : u
2 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-11 Simulation de référence S 0 (Bruit : 1% et 10%)
Les simulations de première catégorie assurent une bonne identification des modes. Ainsi, la simulation S 11 (la moins bonne !) de la 1ère catégorie visible à la Figure 4-7, même à 10% de bruit, ( )σ ωH reste bien en
deçà de la courbe de la valeur singulière maximum vraie.
Les simulations de deuxième catégorie conservent toutes leurs capacités d’identification pour des faibles niveaux de bruit.
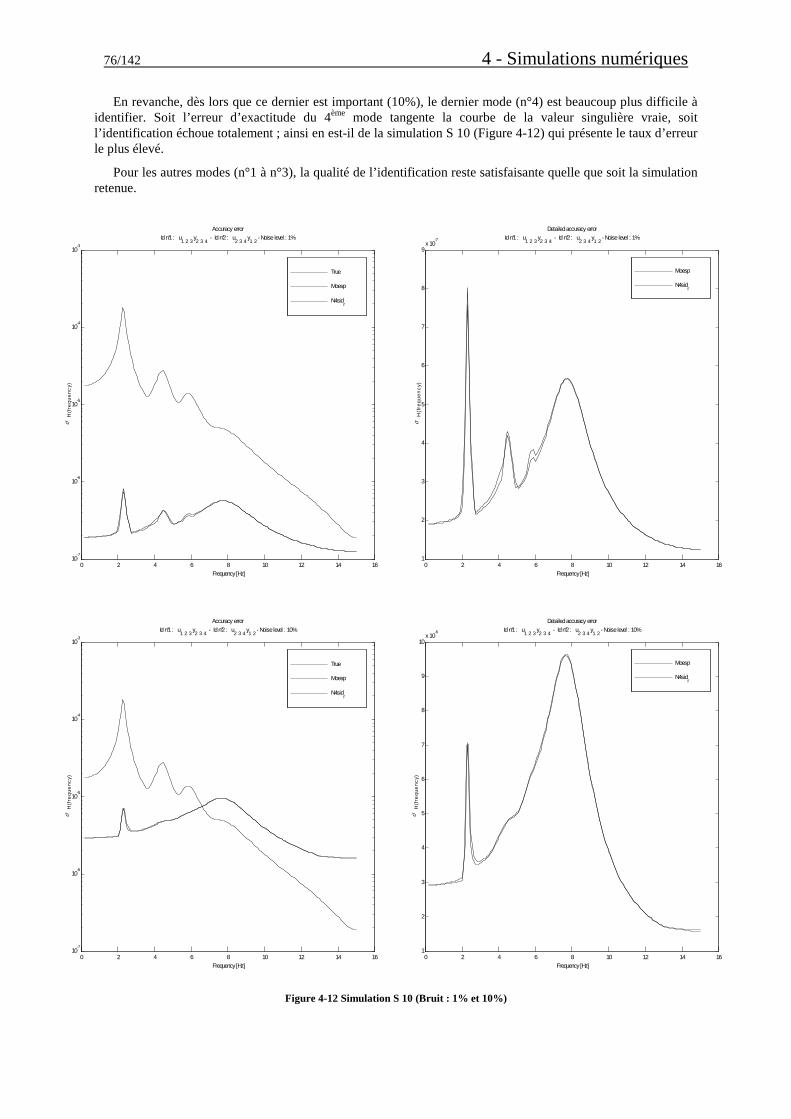
76/142 4 - Simulations numériques
En revanche, dès lors que ce dernier est important (10%), le dernier mode (n°4) est beaucoup plus difficile à identifier. Soit l’erreur d’exactitude du 4ème mode tangente la courbe de la valeur singulière vraie, soit l’identification échoue totalement ; ainsi en est-il de la simulation S 10 (Figure 4-12) qui présente le taux d’erreur le plus élevé.
Pour les autres modes (n°1 à n°3), la qualité de l’identification reste satisfaisante quelle que soit la simulation retenue.
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
2 3 4 - Id n°2 : u
2 3 4 y
1 2 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 161
2
3
4
5
6
7
8
9x 10
-7
Detailed accuracy errorId n°1 : u
1 2 3 y
2 3 4 - Id n°2 : u
2 3 4 y
1 2 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
2 3 4 - Id n°2 : u
2 3 4 y
1 2 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 161
2
3
4
5
6
7
8
9
10x 10
-6
Detailed accuracy errorId n°1 : u
1 2 3 y
2 3 4 - Id n°2 : u
2 3 4 y
1 2 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-12 Simulation S 10 (Bruit : 1% et 10%)

Recombinaison de plusieurs représentations d'état - 4.2 77/142
Identification des matrices physiques :
Une première analyse des résultats confirme la distinction toujours très nette entre les deux catégories de simulation (cf. Figure 4-13) particulièrement en ce qui concerne les valeurs maximales Ε K max et Ε C max . Ces
indicateurs présentent pour la deuxième catégorie une forte dispersion et un niveau moyen comparativement élevé. La différenciation s'atténue en revanche pour les indicateurs moyens (Ε K moy et Ε C moy ).
Par contre, alors qu'en l'absence de bruit, les résultats de l’identification des matrices physiques sont assez sensiblement différents suivant l’algorithme étudié (Moesp ou N4sidr), dès lors que le bruit est non nul, quasiment plus aucune différence n'est visible. Ce constat est valable quelques soient les simulations (1ère catégorie, 2ème catégorie ou simulation S 0 de référence).
Bruit : 1%
Bruit : 1%
Bruit : 10%
Bruit : 10%
EK max
EK max
EK max
EK max
EK moy
EK moy
EK moy
EK moy
EC moy
EC moy
EC moy
EC moy
EC max
EC max
EC max
EC max
Erreur [%]
Erreur [%]
0
0
50 100 200 300 350
1492
2ème catégorie (Moesp & N4sidr)
1ère catégorie (Moesp & N4sidr)
30020010050 350
| : simulation de référence S 0
| : simulation particulière S 6
Figure 4-13 Evaluation comparative : niveaux d'erreur versus catégorie (Bruit : 1% & 10%)
La simulation de référence S 0 - surimposée sur la moitié supérieure de la Figure 4-13 - se situe dans la moyenne des résultats issus des simulations de 1ère catégorie. Elle met ainsi en évidence la bonne performance des simulations de première catégorie.
Le cas particulier de la simulation S 6, mis originellement en évidence en l'absence de bruit - surimposée sur la moitié inférieure de la Figure 4-13 - perdure lorsque le signal est bruité. Cette dernière présente en effet toujours une qualité d’identification généralement comparable au groupe des simulations de 1ère catégorie avec 1% ou 10% de bruit.
4.2.3.3.Bilan
Dans la mesure du possible, la mise en œuvre au niveau expérimental des procédures, utilisant des identifications de première catégorie, est à privilégier à savoir : un nombre d’entrées et de sorties communes supérieurs au nombre d’entrées et de sorties transférées. Il est bien évident qu’un nombre important d’entrées et de sorties communes n’est pas très intéressant expérimentalement. Bien heureusement, les résultats des identifications (représentation espace état et matrices physiques) des simulations de deuxième catégorie, restent satisfaisants.
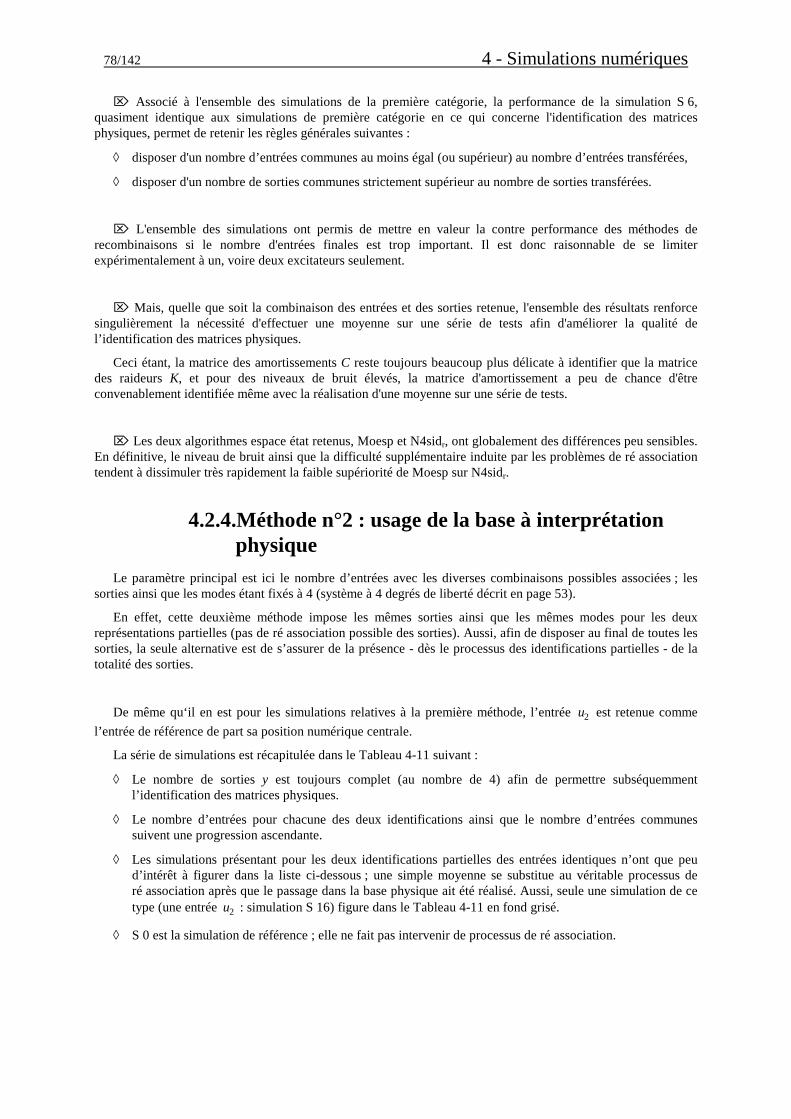
78/142 4 - Simulations numériques
Associé à l'ensemble des simulations de la première catégorie, la performance de la simulation S 6, quasiment identique aux simulations de première catégorie en ce qui concerne l'identification des matrices physiques, permet de retenir les règles générales suivantes :
◊ disposer d'un nombre d’entrées communes au moins égal (ou supérieur) au nombre d’entrées transférées,
◊ disposer d'un nombre de sorties communes strictement supérieur au nombre de sorties transférées.
L'ensemble des simulations ont permis de mettre en valeur la contre performance des méthodes de recombinaisons si le nombre d'entrées finales est trop important. Il est donc raisonnable de se limiter expérimentalement à un, voire deux excitateurs seulement.
Mais, quelle que soit la combinaison des entrées et des sorties retenue, l'ensemble des résultats renforce singulièrement la nécessité d'effectuer une moyenne sur une série de tests afin d'améliorer la qualité de l’identification des matrices physiques.
Ceci étant, la matrice des amortissements C reste toujours beaucoup plus délicate à identifier que la matrice des raideurs K, et pour des niveaux de bruit élevés, la matrice d'amortissement a peu de chance d'être convenablement identifiée même avec la réalisation d'une moyenne sur une série de tests.
Les deux algorithmes espace état retenus, Moesp et N4sidr, ont globalement des différences peu sensibles. En définitive, le niveau de bruit ainsi que la difficulté supplémentaire induite par les problèmes de ré association tendent à dissimuler très rapidement la faible supériorité de Moesp sur N4sidr.
4.2.4.Méthode n°2 : usage de la base à interprétation physique
Le paramètre principal est ici le nombre d’entrées avec les diverses combinaisons possibles associées ; les sorties ainsi que les modes étant fixés à 4 (système à 4 degrés de liberté décrit en page 53).
En effet, cette deuxième méthode impose les mêmes sorties ainsi que les mêmes modes pour les deux représentations partielles (pas de ré association possible des sorties). Aussi, afin de disposer au final de toutes les sorties, la seule alternative est de s’assurer de la présence - dès le processus des identifications partielles - de la totalité des sorties.
De même qu‘il en est pour les simulations relatives à la première méthode, l’entrée u2 est retenue comme
l’entrée de référence de part sa position numérique centrale.
La série de simulations est récapitulée dans le Tableau 4-11 suivant :
◊ Le nombre de sorties y est toujours complet (au nombre de 4) afin de permettre subséquemment l’identification des matrices physiques.
◊ Le nombre d’entrées pour chacune des deux identifications ainsi que le nombre d’entrées communes suivent une progression ascendante.
◊ Les simulations présentant pour les deux identifications partielles des entrées identiques n’ont que peu d’intérêt à figurer dans la liste ci-dessous ; une simple moyenne se substitue au véritable processus de ré association après que le passage dans la base physique ait été réalisé. Aussi, seule une simulation de ce type (une entrée u2 : simulation S 16) figure dans le Tableau 4-11 en fond grisé.
◊ S 0 est la simulation de référence ; elle ne fait pas intervenir de processus de ré association.
Recombinaison de plusieurs représentations d'état - 4.2 79/142
N° de Identification n°1 Identification n°2 Entrées u après
Entrées u
simulation ui y i ui y i recom-binaison
communes Commentaires
S 0 u2 y1 y2 y3 y4
- - u2 - Identification directe sans recombinaison servant de référence.
S 14 u1 y1 y2 y3 y4
u2 y1 y2 y3 y4
u1 u2
- Pas d’entrée commune.
S 15 u2 y1 y2 y3 y4
u3 y1 y2 y3 y4
u2 u3
- Pas d’entrée commune.
S 16 u2 y1 y2 y3 y4
u2 y1 y2 y3 y4
u2 u2 Identification directe sans recombinaison.
S 17 u1 u2
y1 y2 y3 y4
u2 u3
y1 y2 y3 y4
u1 u2 u3
u2
1 entrée commune/2.
S 18 u1 u2 u3
y1 y2 y3 y4
u2 u3 u4
y1 y2 y3 y4
u1 u2 u3 u4
u2 u3
2 entrées communes/3.
Tableau 4-11 Récapitulatif des simulations effectuées sur un système à 4 ddls
4.2.4.1.Analyse pour 0% de bruit
Identification de la représentation espace état finale :
De manière constante, les représentations finales sont affectées d’un taux d’erreur comparativement très au dessus de ce que présente la simulation de référence S 0 ainsi qu’en témoigne entre autres la simulation S 14 (Figure 4-14).
Le principe du transfert dans la base physique ne semble pas en cause directement compte tenu de la simulation particulière S 16 Figure 4-15 (pas de ré association au sens propre) qui présente des résultats équivalents à S 0 en terme d’ordre de grandeur.
D’autre par et après analyse des dernières simulations (S 17 et S 18 Figure 4-16), il semble que le nombre d’entrées pas plus d’ailleurs que le nombre d’entrées communes ne jouent de rôle dans cette dégradation.
Le Tableau 4-12 résume comparativement les ordres de grandeur des différentes simulations évoquées.
Malgré tout, et toute proportion gardée, les taux d’erreur - σ y moy comme ( )σ ωH - constatés baissent
légèrement de manière inversement proportionnelle au nombre d’entrées (le nombre de sorties étant constant). Ainsi en est-il des simulations S 17 et S 18 (Figure 4-17) disposant d’un grand nombre d’entrées. Il est bon de rappeler ici que la détermination de la matrice de passage implique effectivement le nombre d’entrées (et de sorties) mais en aucun cas le nombre d’entrées communes puisqu’il s’agit d’un transfert dans la base physique.

80/142 4 - Simulations numériques
2ème méthode S 16 S 035
σ y moy 10 6− 10 20− 10 20−
( )σ ωH 10 4− 10 18− 10 18−
Tableau 4-12 Evaluation comparative des niveaux d’erreur (Bruit : 0%)
Les différentes simulations ne permettent pas ici de distinguer la prééminence d’un algorithme sur l’autre (voir les graphiques ( )σ ωH détaillés) excepté la simulation de référence S 16 qui, à l’instar de la simulation S 0,
présente une supériorité initiale de l'algorithme Moesp sur N4sidr (gain d’environ 2 sur σ y moy, avec une
meilleure consistance générale et un taux d’erreur réduit sur ( )σ ωH pour Moesp). En définitive, il semble que le
niveau d’erreur apporté par le processus de recombinaison (déjà relativement élevé même en l’absence de bruit rapporté) submerge la distinction possible entre les deux algorithmes.
35 cf. la Figure 4-5 page 65.
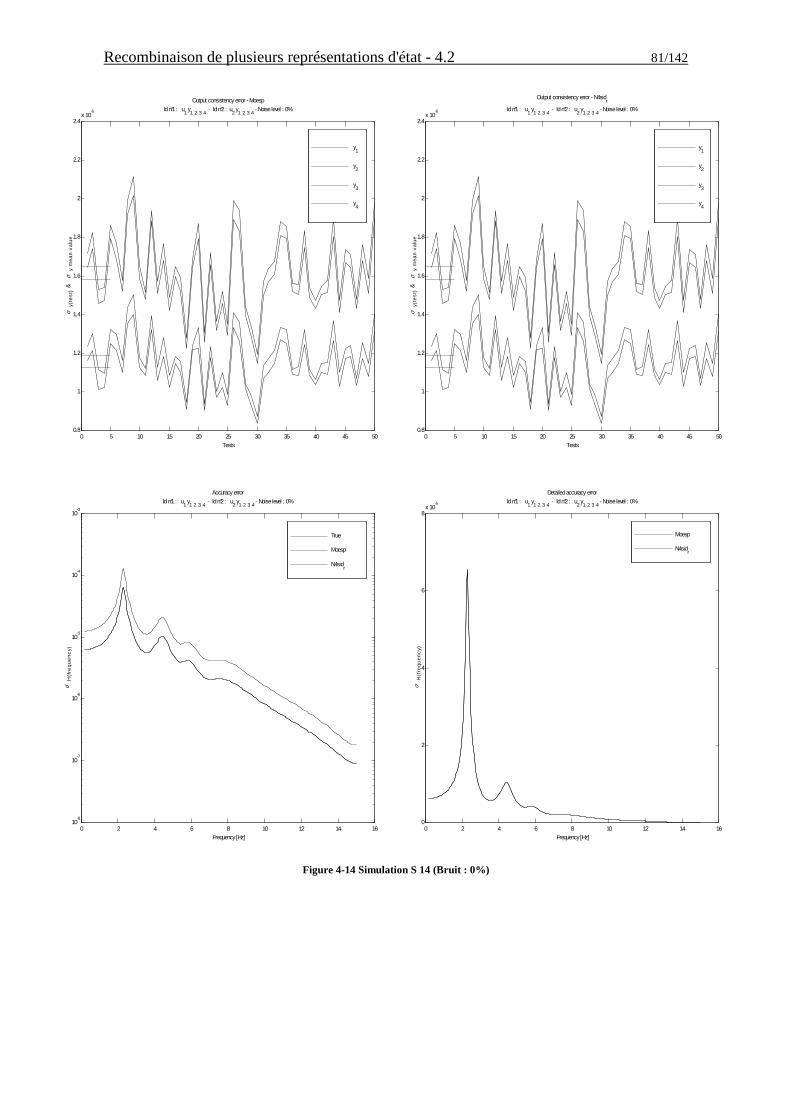
Recombinaison de plusieurs représentations d'état - 4.2 81/142
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10
-6
Output consistency error - MoespId n°1 : u
1 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10
-6
Output consistency error - N4sidr
Id n°1 : u1 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6
8x 10
-5
Detailed accuracy errorId n°1 : u
1 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-14 Simulation S 14 (Bruit : 0%)
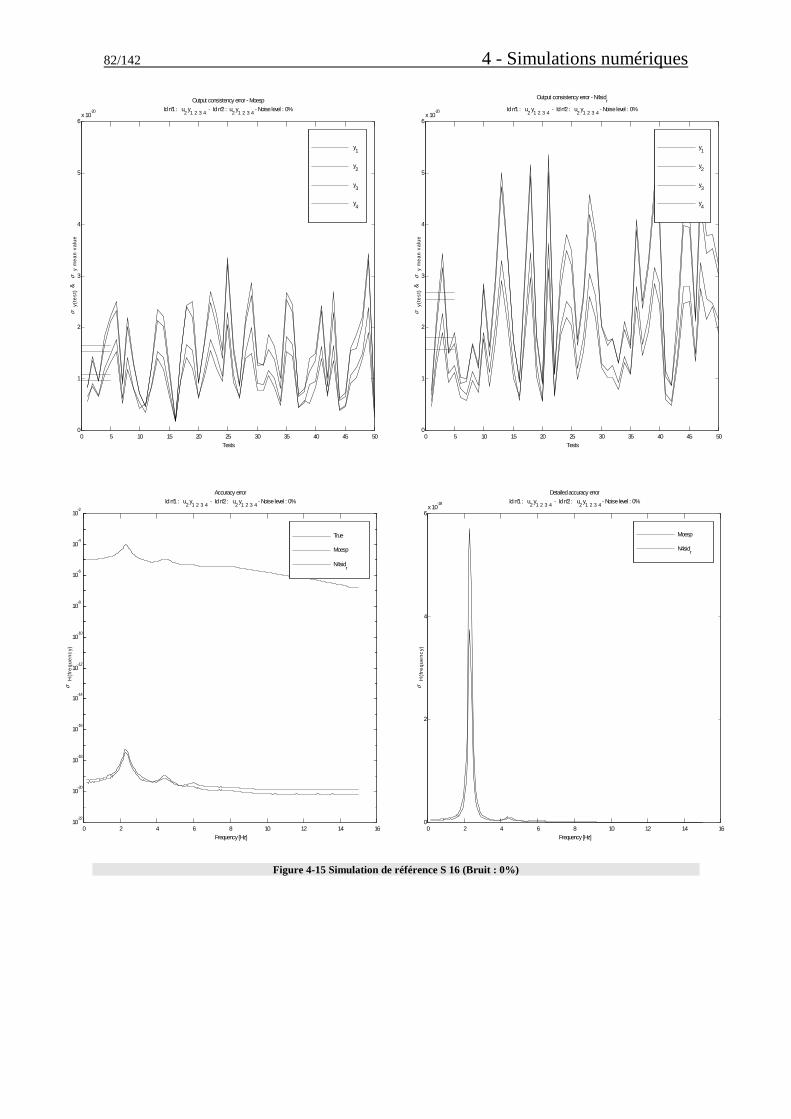
82/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6x 10
-20
Output consistency error - MoespId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6x 10
-20
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-22
10-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6x 10
-18
Detailed accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-15 Simulation de référence S 16 (Bruit : 0%)
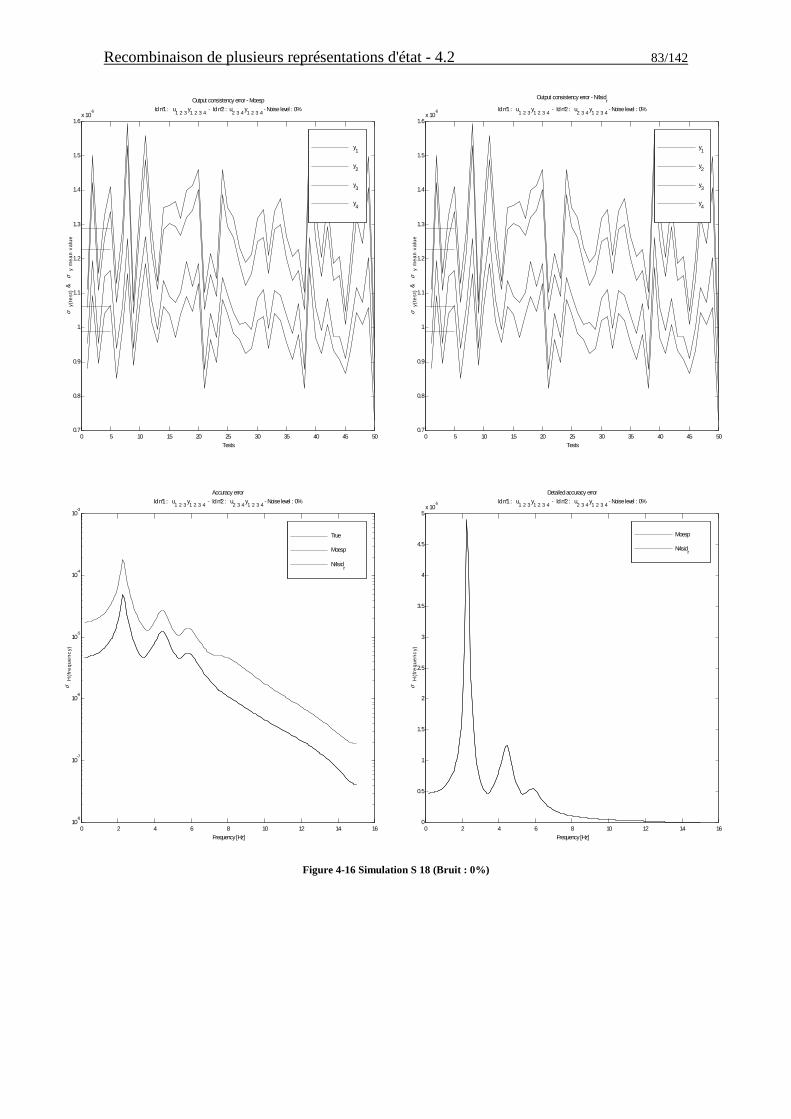
Recombinaison de plusieurs représentations d'état - 4.2 83/142
0 5 10 15 20 25 30 35 40 45 500.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
-6
Output consistency error - MoespId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
-6
Output consistency error - N4sidr
Id n°1 : u1 2 3
y1 2 3 4
- Id n°2 : u2 3 4
y1 2 3 4
- Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-5
Detailed accuracy errorId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-16 Simulation S 18 (Bruit : 0%)
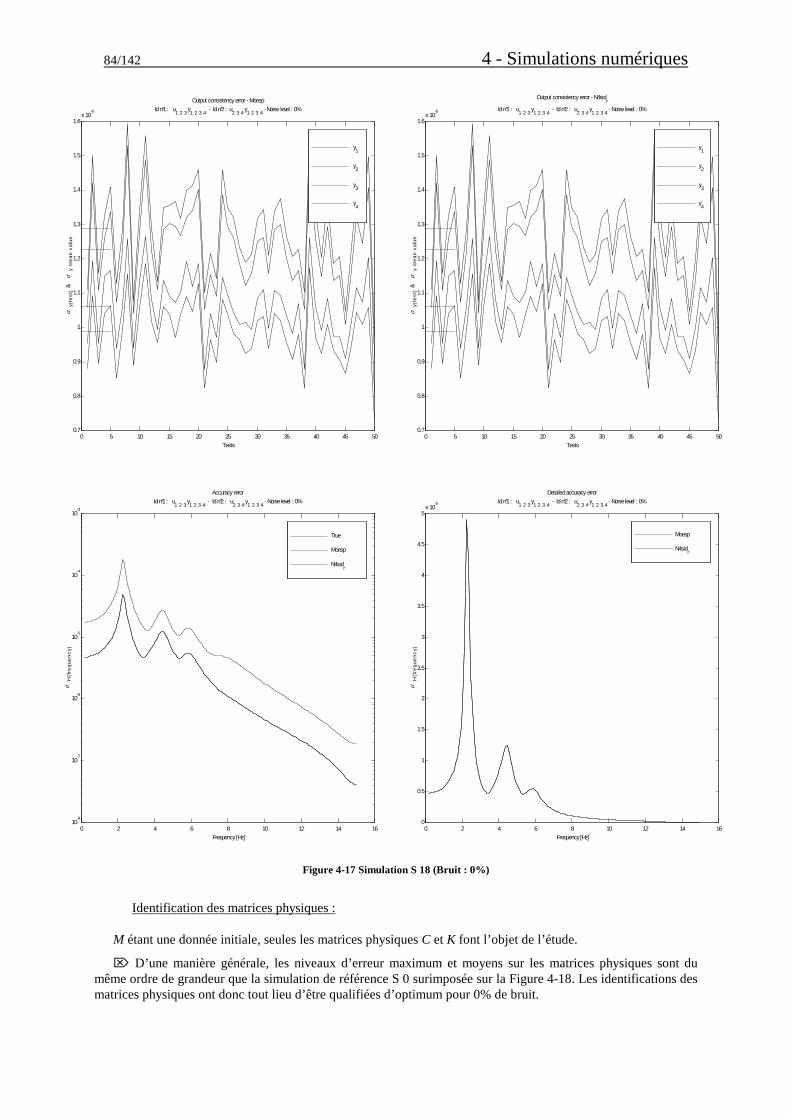
84/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
-6
Output consistency error - MoespId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
-6
Output consistency error - N4sidr
Id n°1 : u1 2 3
y1 2 3 4
- Id n°2 : u2 3 4
y1 2 3 4
- Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-5
Detailed accuracy errorId n°1 : u
1 2 3 y
1 2 3 4 - Id n°2 : u
2 3 4 y
1 2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-17 Simulation S 18 (Bruit : 0%)
Identification des matrices physiques :
M étant une donnée initiale, seules les matrices physiques C et K font l’objet de l’étude.
D’une manière générale, les niveaux d’erreur maximum et moyens sur les matrices physiques sont du même ordre de grandeur que la simulation de référence S 0 surimposée sur la Figure 4-18. Les identifications des matrices physiques ont donc tout lieu d’être qualifiées d’optimum pour 0% de bruit.
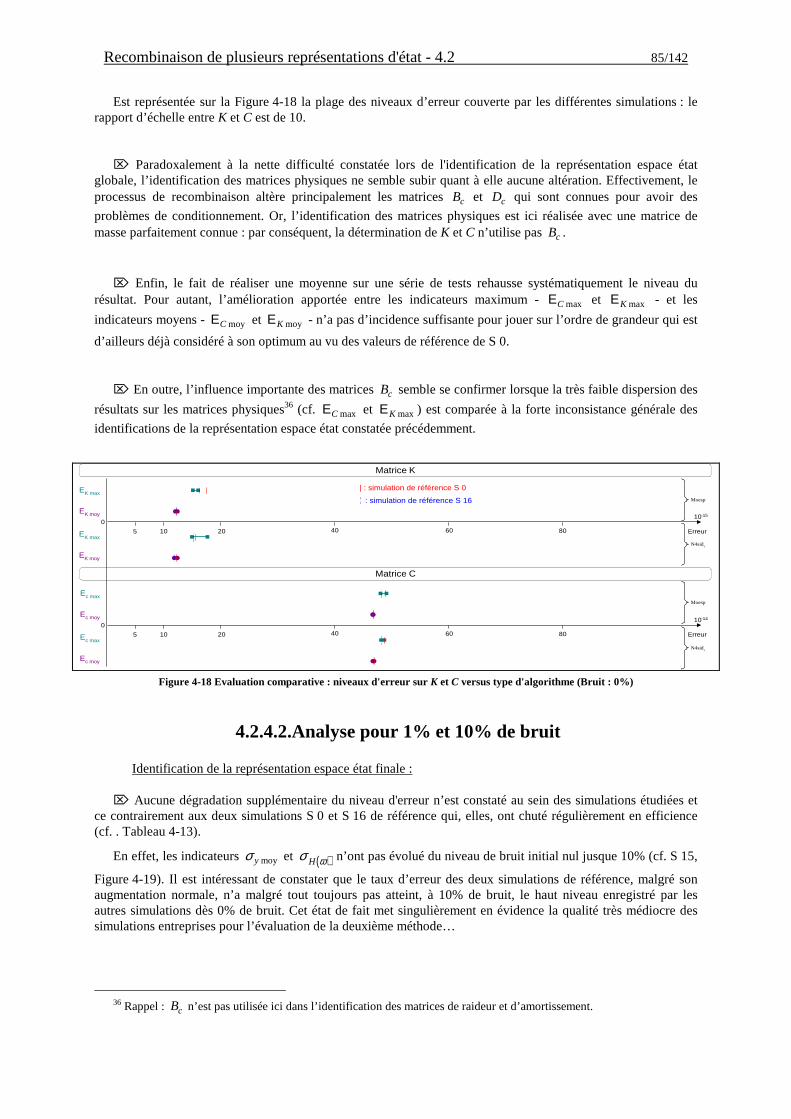
Recombinaison de plusieurs représentations d'état - 4.2 85/142
Est représentée sur la Figure 4-18 la plage des niveaux d’erreur couverte par les différentes simulations : le rapport d’échelle entre K et C est de 10.
Paradoxalement à la nette difficulté constatée lors de l'identification de la représentation espace état globale, l’identification des matrices physiques ne semble subir quant à elle aucune altération. Effectivement, le processus de recombinaison altère principalement les matrices Bc et Dc qui sont connues pour avoir des
problèmes de conditionnement. Or, l’identification des matrices physiques est ici réalisée avec une matrice de masse parfaitement connue : par conséquent, la détermination de K et C n’utilise pas Bc .
Enfin, le fait de réaliser une moyenne sur une série de tests rehausse systématiquement le niveau du résultat. Pour autant, l’amélioration apportée entre les indicateurs maximum - ΕC max et Ε K max - et les
indicateurs moyens - ΕC moy et Ε K moy - n’a pas d’incidence suffisante pour jouer sur l’ordre de grandeur qui est
d’ailleurs déjà considéré à son optimum au vu des valeurs de référence de S 0.
En outre, l’influence importante des matrices Bc semble se confirmer lorsque la très faible dispersion des
résultats sur les matrices physiques36 (cf. ΕC max et Ε K max ) est comparée à la forte inconsistance générale des
identifications de la représentation espace état constatée précédemment.
Moesp
N4sidr
EK max
EK moy 10-15
0
10 20 40 60 805
Matrice C
Matrice K
| : simulation de référence S 0
EK max
EK moy
Moesp
N4sidr
Ec max
Ec moy 10-14
0
10 20 40 60 805Ec max
Ec moy
Erreur
Erreur
: simulation de référence S 16
Figure 4-18 Evaluation comparative : niveaux d'erreur sur K et C versus type d'algorithme (Bruit : 0%)
4.2.4.2.Analyse pour 1% et 10% de bruit
Identification de la représentation espace état finale :
Aucune dégradation supplémentaire du niveau d'erreur n’est constaté au sein des simulations étudiées et ce contrairement aux deux simulations S 0 et S 16 de référence qui, elles, ont chuté régulièrement en efficience (cf. . Tableau 4-13).
En effet, les indicateurs σ y moy et ( )σ ωH n’ont pas évolué du niveau de bruit initial nul jusque 10% (cf. S 15,
Figure 4-19). Il est intéressant de constater que le taux d’erreur des deux simulations de référence, malgré son augmentation normale, n’a malgré tout toujours pas atteint, à 10% de bruit, le haut niveau enregistré par les autres simulations dès 0% de bruit. Cet état de fait met singulièrement en évidence la qualité très médiocre des simulations entreprises pour l’évaluation de la deuxième méthode…
36 Rappel : Bc n’est pas utilisée ici dans l’identification des matrices de raideur et d’amortissement.

86/142 4 - Simulations numériques
2ème méthode S 16 S 037 1% 10% 1% 10% 1% 10%
σ y moy 10 6− 10 9− 10 8− 10 9− 10 8−
( )σ ωH 10 4− 10 7− 10 6− 10 7− 10 6−
Tableau 4-13 Evaluation comparative des niveaux d’erreur (Bruit : 1 à 10%)
Il semble donc que cette deuxième méthode soit particulièrement sensible au processus de ré association des entrées (donc à Bc !) qui semble générer, même à faible niveau de bruit, un taux d'erreur très élevé.
Comme déjà mis en évidence pour 0% de bruit, la qualité des résultats gagne à disposer d’un nombre d’entrées le plus important possible (Comparer S 15 Figure 4-19 et S 17 Figure 4-20).
Enfin, au même titre que pour 0% de bruit, les deux algorithmes Moesp et N4sidr ne se distinguent pas pour ce qui concerne les simulations courantes. Seules les deux simulations de référence S 16 (Figure 4-21) et S 0 (Figure 4-11 page 75) confirment encore la supériorité de l’algorithme Moesp sur N4sidr.
37 cf. la Figure 4-11 page 75.
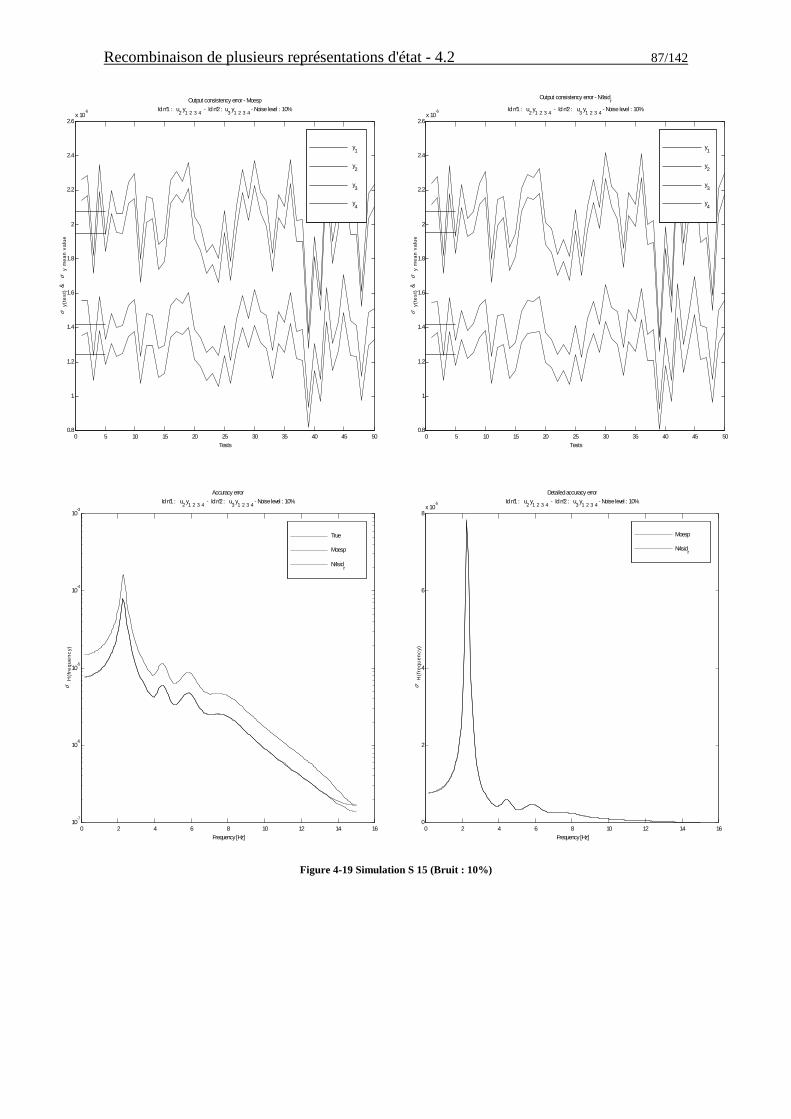
Recombinaison de plusieurs représentations d'état - 4.2 87/142
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6x 10
-6
Output consistency error - MoespId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
3 y
1 2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6x 10
-6
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 4 - Id n°2 : u
3 y
1 2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
3 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6
8x 10
-5
Detailed accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
3 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-19 Simulation S 15 (Bruit : 10%)
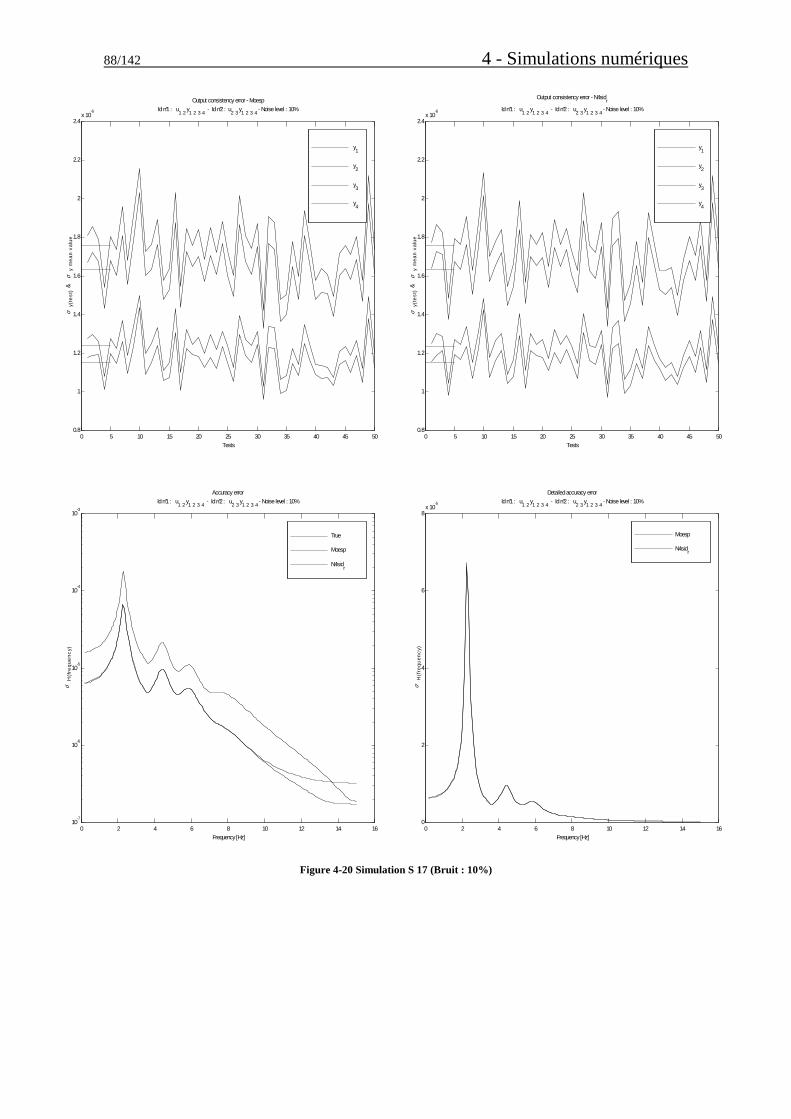
88/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10
-6
Output consistency error - MoespId n°1 : u
1 2 y
1 2 3 4 - Id n°2 : u
2 3 y
1 2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10
-6
Output consistency error - N4sidr
Id n°1 : u1 2
y1 2 3 4
- Id n°2 : u2 3
y1 2 3 4
- Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 y
1 2 3 4 - Id n°2 : u
2 3 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
2
4
6
8x 10
-5
Detailed accuracy errorId n°1 : u
1 2 y
1 2 3 4 - Id n°2 : u
2 3 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-20 Simulation S 17 (Bruit : 10%)
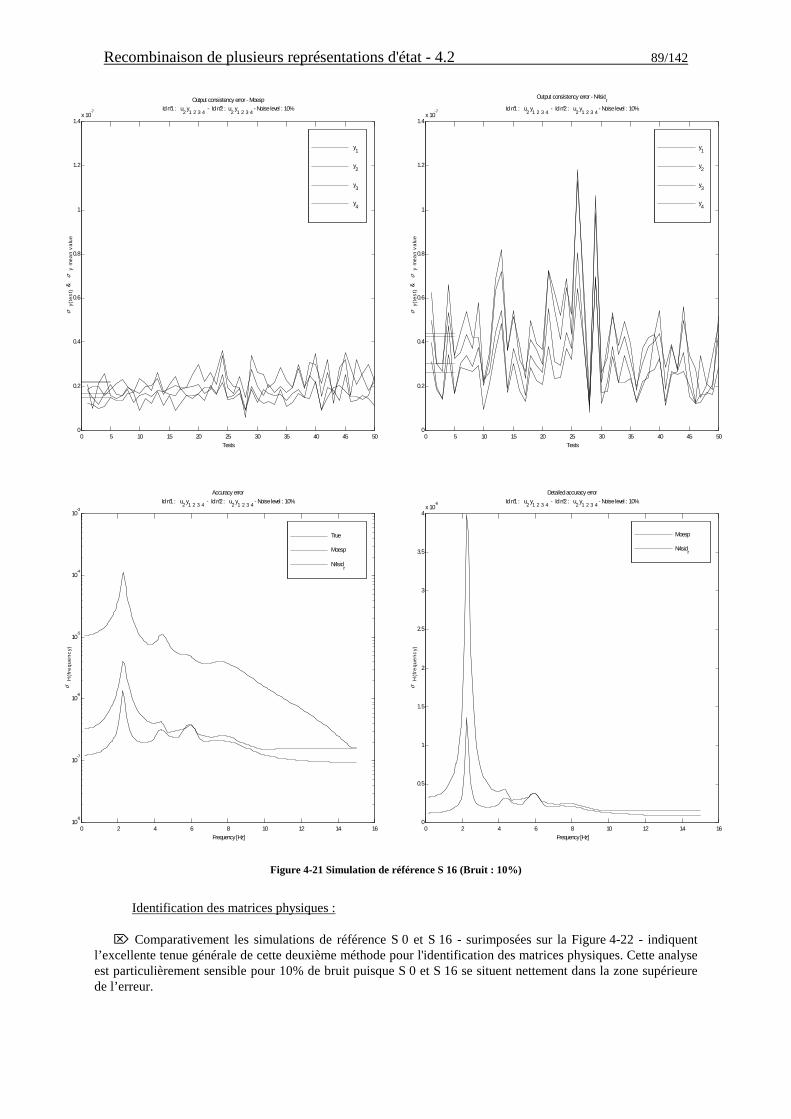
Recombinaison de plusieurs représentations d'état - 4.2 89/142
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-7
Output consistency error - MoespId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-7
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5
4x 10
-6
Detailed accuracy errorId n°1 : u
2 y
1 2 3 4 - Id n°2 : u
2 y
1 2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-21 Simulation de référence S 16 (Bruit : 10%)
Identification des matrices physiques :
Comparativement les simulations de référence S 0 et S 16 - surimposées sur la Figure 4-22 - indiquent l’excellente tenue générale de cette deuxième méthode pour l'identification des matrices physiques. Cette analyse est particulièrement sensible pour 10% de bruit puisque S 0 et S 16 se situent nettement dans la zone supérieure de l’erreur.

90/142 4 - Simulations numériques
Ce constat met à nouveau en valeur l’intérêt d’un nombre d’entrées le plus important possible dans le cadre de cette méthode projetant les représentations espace état dans l’espace physique. En effet, les deux simulations de référence concernées ici ne disposent que d’une entrée u2 .
La faible différence encore sensible à 0% de bruit entre les algorithmes Moesp et N4sidr n’est plus du tout perceptible dès lors que le bruit n’est plus nul.
Enfin, l'intérêt d'une moyenne sur une série de tests conserve un intérêt certain. Elle s'avère particulièrement utile pour l'identification de la matrice d'amortissement C qui reste toujours la matrice la plus délicate à identifier.
Bruit : 1%
Bruit : 10%
EK max
EK max
EK moy
EK moy
EC moy
EC moy
EC max
EC max
Erreur [%]0
50 100 200 300 350
(Moesp & N4sidr)
| : simulation de référence S 0
: simulation de référence S 16
Figure 4-22 Evaluation comparative : niveaux d'erreur sur K et C versus type d'algorithme (Bruit : 1% et 10%)
4.2.4.3.Bilan
Les résultats obtenus avec cette deuxième méthode mettent en exergue la difficulté particulière à ré associer les entrées dans l’espace physique. Il semble, compte tenu des diverses analyses précédentes, que la projection dans la base physique n’en est pas la cause directe ; son origine proviendrait plutôt du biais se créant entre les diverses identifications partielles de la matrice Bc - matrice des entrées dans l'espace physique - avant
toute recombinaison. En conséquence suite au processus de ré association, la matrice Bc finale décrit
inégalement la structure totale et génère les forts niveaux d’erreur constatés ci avant.
Dès lors, le taux d’erreur élevé découlant de la recombinaison détruit la singularité originelle entre les deux algorithmes utilisés - Moesp et N4sidr - qui de fait fournissent des résultats quasi similaires malgré la supériorité initiale de Moesp mise en valeur dans les simulations de référence S 0 et S 16.
Quant aux matrices physiques, leur identification s’avère globalement satisfaisante. Par contre, il est important de noter ici que, dans le cadre de ces identifications, la matrice Bc finale n’est pas exploitée pour
élaborer ces matrices physiques (matrice masse M donnée). Dans le cas contraire, il est fort probable que des résultats nettement plus médiocres soient obtenus au même titre que ceux obtenus lors de l’identification de la représentation espace état finale.
4.2.5.Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M
A la différence des précédentes méthodes, l’application de cette dernière impose la connaissance du système relationnel Γ de la structure qui décrit les liens comportementaux (raideur kk et amortissement ck ) existant
entre les n nœuds. Ces liens, réels (structures par nature très discrète) ou résultant d’une discrétisation volontaire type éléments finis, sont au nombre de p (k=1…p).

Recombinaison de plusieurs représentations d'état - 4.2 91/142
Une perception réelle du modèle est donc un préalable nécessaire afin de constituer ce système relationnel.
k1, c1 k2, c2
1 2
k3, c3
3
k4, c4
4
Figure 4-23 Représentation du système à 4 ddls
De plus, une représentation matricielle de Γ s’avère opportune pour faciliter aussi bien la visualisation que la programmation.
La matrice Γ de dimension n n× est donc définie. Dans celle-ci, la ligne i et la colonne j correspondent respectivement aux nœuds i et j. Dans cette matrice, la valeur 1 est attribuée lorsque les nœuds i et j sont reliés par un modèle de comportement mécanique ; la diagonale est égale à l’unité et les autres termes sont pris égaux à zéro.
Γ est une matrice symétrique.
Ainsi, la matrice Γ représentative du système à 4 degrés de liberté décrit par la Figure 4-23 prend la forme suivante :
( )
Γ =
1 1 0 0
1 1 1 0
0 1 1 1
0 0 1 1n n,
( 4-4)
Une fois construite pour un système mécanique donné, la matrice du système relationnel Γ permet de sélectionner aisément dans les matrices d’état partielles les lignes à invalider des autres.
Comme cela est développé au paragraphe 2.3.3, cette sélection dépend de la présence ou non des sorties nécessaires à la complète identification des caractéristiques mécaniques. La matrice Γ est exploitée de la manière suivante :
◊ Les numéros de lignes de Γ ne correspondant à aucun numéro de sorties sont invalidés d’office.
◊ Pour les lignes dont les numéros correspondent effectivement aux sorties utilisées : la ligne est invalidée si, au regard des numéros de colonnes de valeur unité (=1), les numéros de sorties correspondant ne sont pas présents.
En reprenant le cas du système à 4 degrés de liberté (équation ( 4-4)), et en considérant le cas d’une identification partielle utilisant les sorties y1 , y2 et y3 (le nombre et le numéro des entrées n’interviennent pas),
il vient :
◊ 1ère ligne : les sorties y1 et y2 doivent être présentes pour valider la ligne � OK
◊ 2ème ligne : les sorties y1 , y2 et y3 doivent être présentes pour valider la ligne � OK
◊ 3ème ligne : les sorties y2 , y3 et y4 doivent être présentes pour valider la ligne � invalidation de la ligne
3 dans la matrice d’état puisque y4 ne fait pas partie des sorties.
◊ 4ème ligne : cette ligne n’existe pas dans la matrice d’état.
En définitive, seules les lignes correspondant aux sorties y1 et y2 de la matrice d’état sont valides et sont
conservées.

92/142 4 - Simulations numériques
Pour le système à 4 degrés de liberté étudié, il s’avère que pour aboutir à une identification finale comprenant la totalité des sorties (identification des matrices physiques oblige !), une seule combinaison est possible :
◊ Identification n°1 : entrées quelconques - sorties y1 , y2 et y3 .
◊ Identification n°2 : entrées quelconques - sorties y2 , y3 et y4 .
De même qu‘il en est pour les simulations relatives à la méthode 1, l’entrée u2 est retenue comme l’entrée de
référence de part sa position numérique centrale. Enfin, les deux principaux paramètres variables intéressant l’étude sont le nombre d’entrées et le choix des modes retenus ; les sorties ainsi que le nombre de modes étant fixés. En outre, afin de limiter le nombre de simulations, les deux paramètres variables envisagés sont étudiés successivement38.
N° de Identification n°1 Identification n°2 Entrées u Entrées u
après
Modes
simulation ui modes ui modes communes recom-binaison
communs Commentaires
S 0 u2 y1-y2-y3-y4
1 2 3 4
- - - u2 - Identification directe sans recombinaison et avec toutes les sorties servant de référence.
S 19 u2 1 2 3
u2 2 3 4
u2 u2 2 3
1 entrée commune/1 + 2 modes communs.
S 20 u1 u2
1 2 3
u2 u3
2 3 4
u2 u1 u2 u3
2 3
1 entrée commune/2 + 2 modes communs.
S 21 u1 u2
1 2 3
u1 u2
2 3 4
u1 u2
u1 u2
2 3
2 entrées communes/2 + 2 modes communs.
S 22 u2 u3
1 2 3
u2 u3
2 3 4
u2 u3
u2 u3
2 3
2 entrées communes/2 + 2 modes communs.
S 23 u1 u2 u3
1 2 3
u1 u2 u3
2 3 4
u1 u2 u3
u1 u2 u3
2 3
3 entrées communes/3 + 2 modes communs.
S 24 u2 1 2 4
u2 2 3 4
u2 u2 2 4
2 modes communs.
S 25 u2 1 3 4
u2 2 3 4
u2 u2 3 4
2 modes communs.
S 26 u2 1 2 3
u2 1 3 4
u2 u2 1 3
2 modes communs.
S 27 u2 1 2 3
u2 1 2 4
u2 u2 1 2
2 modes communs.
Tableau 4-14 Récapitulatif des simulations effectuées sur un système à 4 ddls
La série de simulations - retenue pour cette étude - faisant varier ces deux paramètres est récapitulée dans le Tableau 4-14 :
38 Il semble par ailleurs - au vu précisément des simulations suivantes - que ces deux paramètres « sortie » et « mode »
n’aient pas d’influences réciproques particulières.
Recombinaison de plusieurs représentations d'état - 4.2 93/142
◊ Les premières simulations s’intéressent au paramètre « entrée ». Viennent ensuite les simulations faisant varier la sélection des modes.
◊ Le nombre de sorties y est identique pour les deux identifications partielles.
◊ Le nombre d’entrées pour chacune des deux identifications ainsi que le nombre d’entrées communes suivent une progression ascendante.
◊ S 0 est la simulation de référence ; elle ne fait pas intervenir de processus de ré association.
4.2.5.1.Analyse pour 0% de bruit
Identification de la représentation espace état finale :
Les simulations étudiées présentent en majorité un niveau de qualité certes inférieur à celui constaté en référence par la simulation S 0 mais restant tout de même à un assez bon niveau (rapport de 100 environ). Ainsi en est-il par exemple de la simulation S 22 (Figure 4-24) ou encore de S 26 (Figure 4-25).
Malgré tout, quelques-unes parmi celles-ci affichent certains résultats de tests fortement inconsistants (par exemple, cf. ( )σ y test de la simulation S 20), tout en conservant un taux d’erreur moyen globalement satisfaisant.
Ces défauts sur l’écart-type de l’erreur de prédiction indiquent donc une difficulté particulière à reconstituer des signaux de sorties fiables.
Finalement, le Tableau 4-15 résume, outre les niveaux d’erreur moyens, les maximum constatés sur certaines simulations. Les résultats de la simulation de référence S 0 y sont aussi précisés.
3ème méthode S 039
σ y moy 10 18− - max. : 10 16− 10 20−
( )σ ωH 10 16− - max. : 10 13− 10 18−
Tableau 4-15 Evaluation comparative niveaux d’erreur (Bruit : 0%)
L’analyse comparative des deux algorithmes Moesp et N4sidr employés met en valeur une faible différence de résultats.
Celle-ci est visible particulièrement sur les courbes d’erreur de consistance ( )σ y test . Par contre, l’inspection
des niveaux d’erreur moyen σ y moy ne permet pas de conclure sur la prééminence de l’un sur l’autre tant les
valeurs semblent proches.
Le constat est identique en ce qui concerne l’erreur d’exactitude ; la faible supériorité dont dispose en apparence l’un des algorithmes dans le cas d’une simulation s’inverse pour une autre simulation (cf. S 20 Figure 4-26 et S 23 Figure 4-27)… En outre, un certain nombre de simulations ne permettent carrément aucune distinction de leurs courbes ( )σ ωH .
39 cf. la Figure 4-5 page 65.
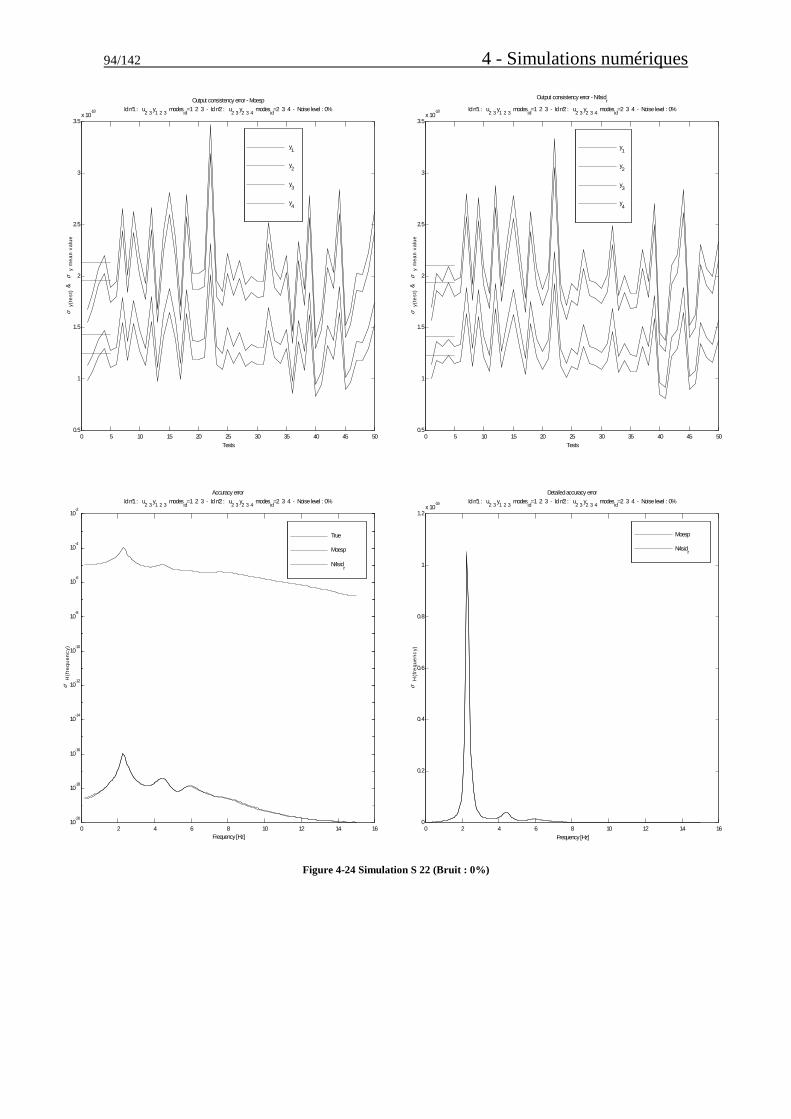
94/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500.5
1
1.5
2
2.5
3
3.5x 10
-18
Output consistency error - MoespId n°1 : u
2 3 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.5
1
1.5
2
2.5
3
3.5x 10
-18
Output consistency error - N4sidr
Id n°1 : u2 3
y1 2 3
modesid=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
2 3 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2x 10
-16
Detailed accuracy errorId n°1 : u
2 3 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-24 Simulation S 22 (Bruit : 0%)
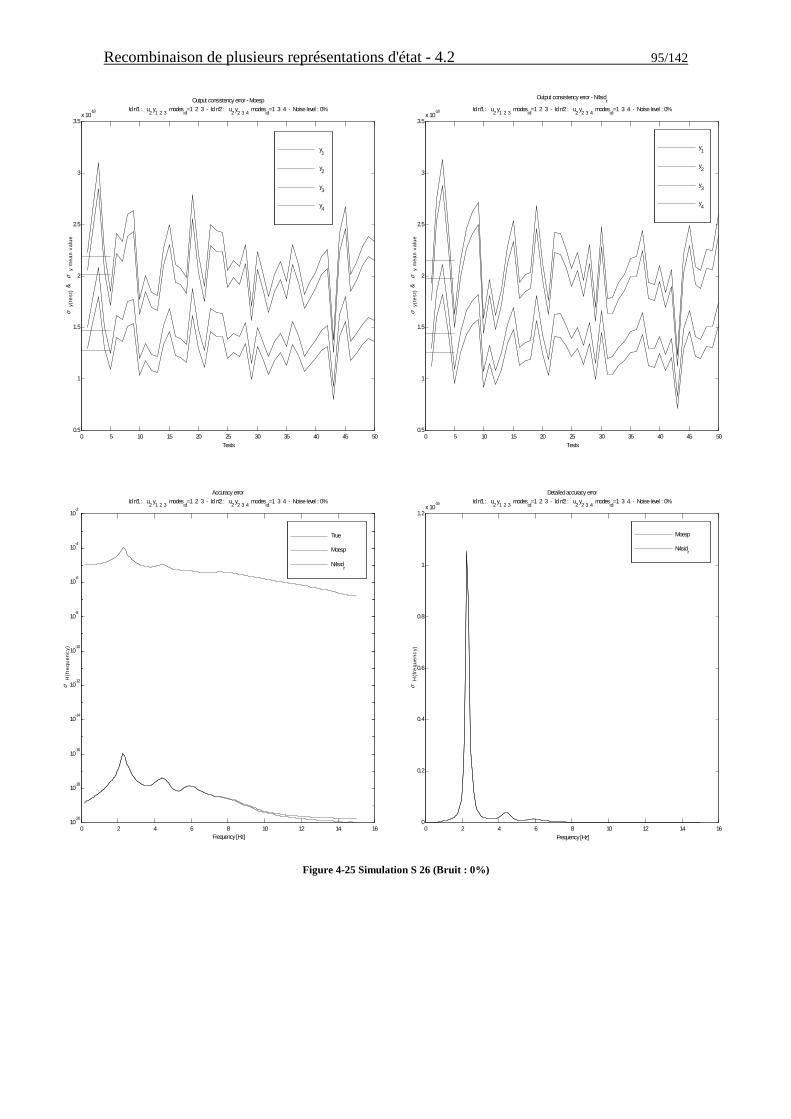
Recombinaison de plusieurs représentations d'état - 4.2 95/142
0 5 10 15 20 25 30 35 40 45 500.5
1
1.5
2
2.5
3
3.5x 10
-18
Output consistency error - MoespId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500.5
1
1.5
2
2.5
3
3.5x 10
-18
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2x 10
-16
Detailed accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-25 Simulation S 26 (Bruit : 0%)
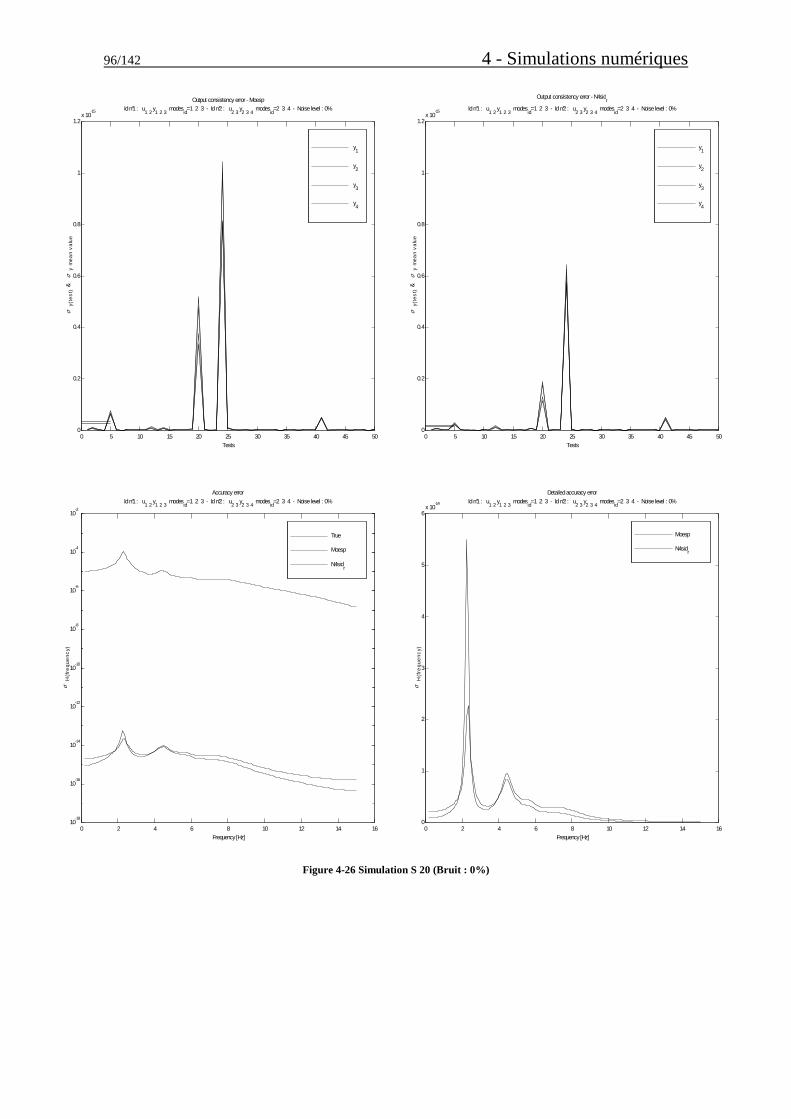
96/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2x 10
-15
Output consistency error - MoespId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2x 10
-15
Output consistency error - N4sidr
Id n°1 : u1 2
y1 2 3
modesid=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6x 10
-14
Detailed accuracy errorId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-26 Simulation S 20 (Bruit : 0%)
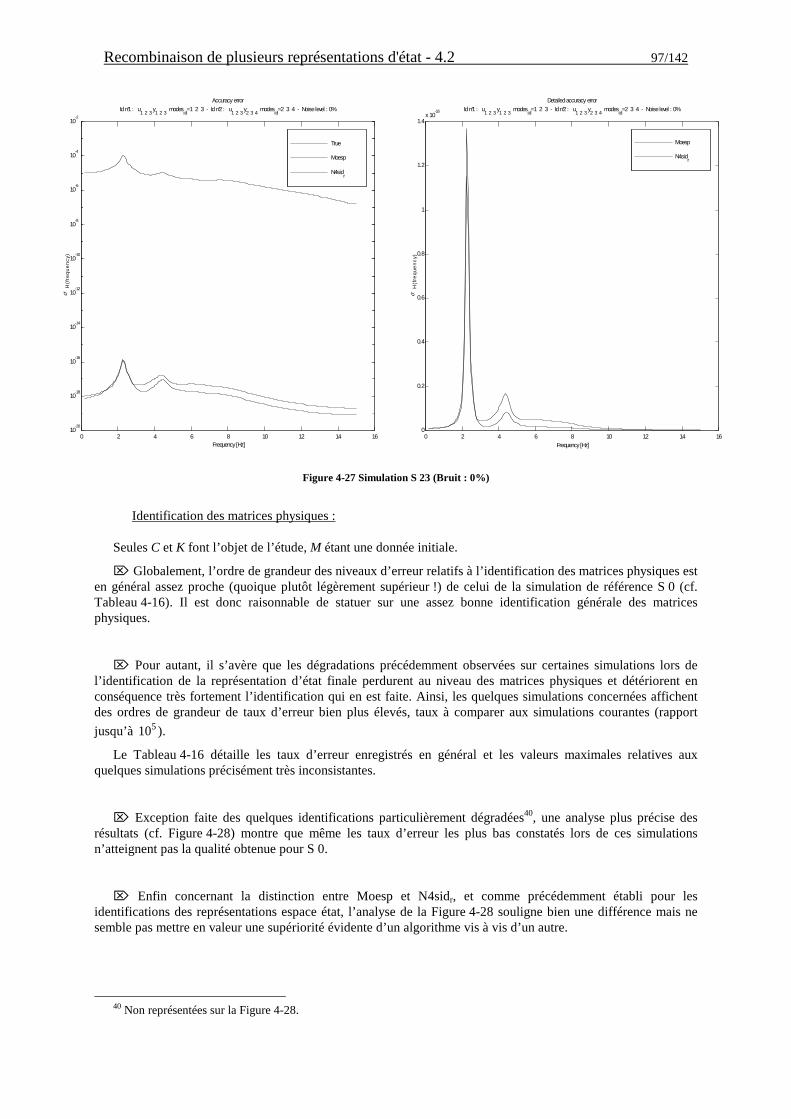
Recombinaison de plusieurs représentations d'état - 4.2 97/142
0 2 4 6 8 10 12 14 1610
-20
10-18
10-16
10-14
10-12
10-10
10-8
10-6
10-4
10-2
Accuracy errorId n°1 : u
1 2 3 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-16
Detailed accuracy errorId n°1 : u
1 2 3 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 3 y
2 3 4 modes
id=2 3 4 - Noise level : 0%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-27 Simulation S 23 (Bruit : 0%)
Identification des matrices physiques :
Seules C et K font l’objet de l’étude, M étant une donnée initiale.
Globalement, l’ordre de grandeur des niveaux d’erreur relatifs à l’identification des matrices physiques est en général assez proche (quoique plutôt légèrement supérieur !) de celui de la simulation de référence S 0 (cf. Tableau 4-16). Il est donc raisonnable de statuer sur une assez bonne identification générale des matrices physiques.
Pour autant, il s’avère que les dégradations précédemment observées sur certaines simulations lors de l’identification de la représentation d’état finale perdurent au niveau des matrices physiques et détériorent en conséquence très fortement l’identification qui en est faite. Ainsi, les quelques simulations concernées affichent des ordres de grandeur de taux d’erreur bien plus élevés, taux à comparer aux simulations courantes (rapport
jusqu’à 105).
Le Tableau 4-16 détaille les taux d’erreur enregistrés en général et les valeurs maximales relatives aux quelques simulations précisément très inconsistantes.
Exception faite des quelques identifications particulièrement dégradées40, une analyse plus précise des résultats (cf. Figure 4-28) montre que même les taux d’erreur les plus bas constatés lors de ces simulations n’atteignent pas la qualité obtenue pour S 0.
Enfin concernant la distinction entre Moesp et N4sidr, et comme précédemment établi pour les identifications des représentations espace état, l’analyse de la Figure 4-28 souligne bien une différence mais ne semble pas mettre en valeur une supériorité évidente d’un algorithme vis à vis d’un autre.
40 Non représentées sur la Figure 4-28.
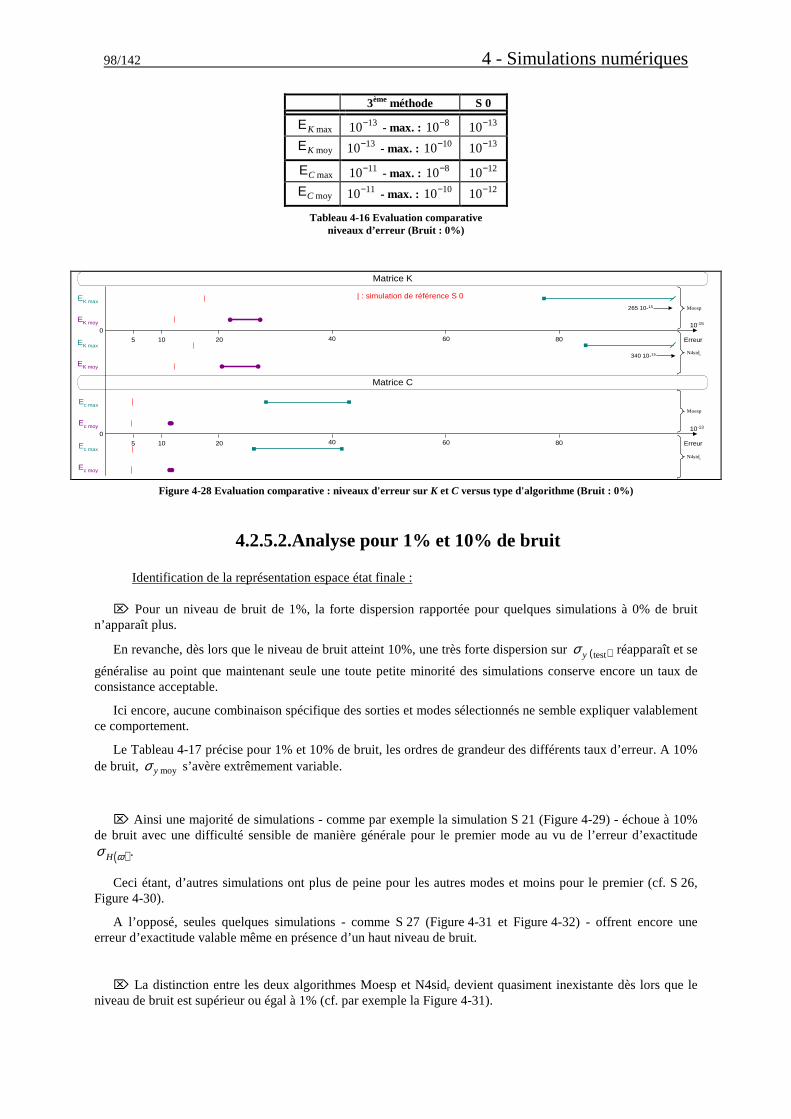
98/142 4 - Simulations numériques
3ème méthode S 0
Ε K max 10 13− - max. : 10 8− 10 13−
Ε K moy 10 13− - max. : 10 10− 10 13−
ΕC max 10 11− - max. : 10 8− 10 12−
ΕC moy 10 11− - max. : 10 10− 10 12−
Tableau 4-16 Evaluation comparative niveaux d’erreur (Bruit : 0%)
Moesp
N4sidr
EK max
EK moy 10-15
0
10 20 40 60 805
Matrice C
Matrice K
| : simulation de référence S 0
EK max
EK moy
265 10-15
340 10-15
Moesp
N4sidr
Ec max
Ec moy 10-13
0
10 20 40 60 805Ec max
Ec moy
Erreur
Erreur
Figure 4-28 Evaluation comparative : niveaux d'erreur sur K et C versus type d'algorithme (Bruit : 0%)
4.2.5.2.Analyse pour 1% et 10% de bruit
Identification de la représentation espace état finale :
Pour un niveau de bruit de 1%, la forte dispersion rapportée pour quelques simulations à 0% de bruit n’apparaît plus.
En revanche, dès lors que le niveau de bruit atteint 10%, une très forte dispersion sur ( )σ y test réapparaît et se
généralise au point que maintenant seule une toute petite minorité des simulations conserve encore un taux de consistance acceptable.
Ici encore, aucune combinaison spécifique des sorties et modes sélectionnés ne semble expliquer valablement ce comportement.
Le Tableau 4-17 précise pour 1% et 10% de bruit, les ordres de grandeur des différents taux d’erreur. A 10% de bruit, σ y moy s’avère extrêmement variable.
Ainsi une majorité de simulations - comme par exemple la simulation S 21 (Figure 4-29) - échoue à 10% de bruit avec une difficulté sensible de manière générale pour le premier mode au vu de l’erreur d’exactitude
( )σ ωH .
Ceci étant, d’autres simulations ont plus de peine pour les autres modes et moins pour le premier (cf. S 26, Figure 4-30).
A l’opposé, seules quelques simulations - comme S 27 (Figure 4-31 et Figure 4-32) - offrent encore une erreur d’exactitude valable même en présence d’un haut niveau de bruit.
La distinction entre les deux algorithmes Moesp et N4sidr devient quasiment inexistante dès lors que le niveau de bruit est supérieur ou égal à 1% (cf. par exemple la Figure 4-31).
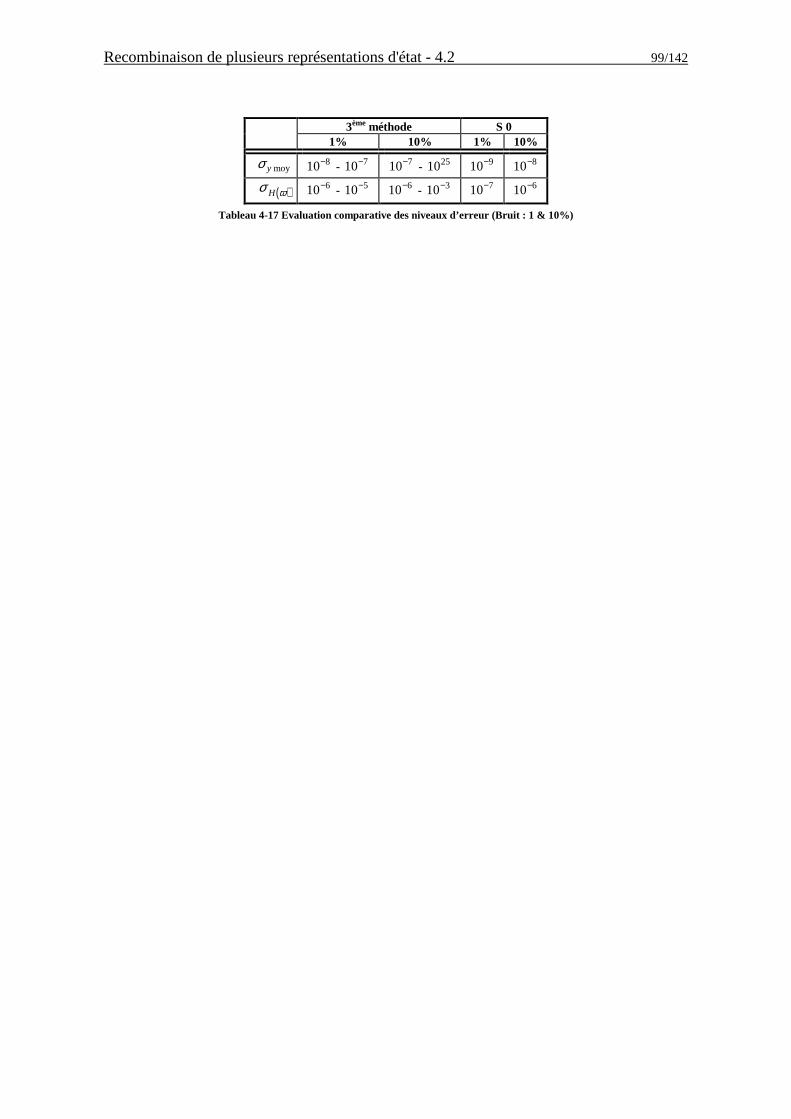
Recombinaison de plusieurs représentations d'état - 4.2 99/142
3ème méthode S 0 1% 10% 1% 10%
σ y moy 10 8− - 10 7− 10 7− - 1025 10 9− 10 8−
( )σ ωH 10 6− - 10 5− 10 6− - 10 3− 10 7− 10 6−
Tableau 4-17 Evaluation comparative des niveaux d’erreur (Bruit : 1 & 10%)
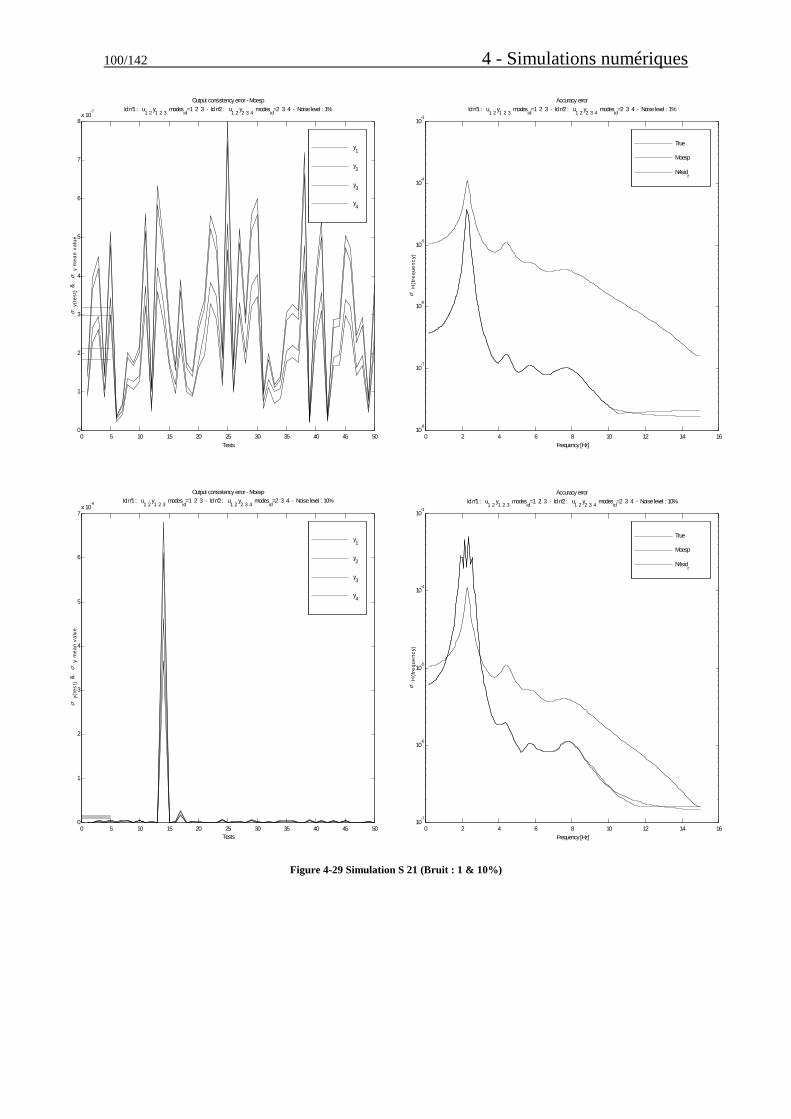
100/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8x 10
-7
Output consistency error - MoespId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 y
2 3 4 modes
id=2 3 4 - Noise level : 1%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 y
2 3 4 modes
id=2 3 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7x 10
-4
Output consistency error - MoespId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 y
2 3 4 modes
id=2 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
1 2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
1 2 y
2 3 4 modes
id=2 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
Figure 4-29 Simulation S 21 (Bruit : 1 & 10%)
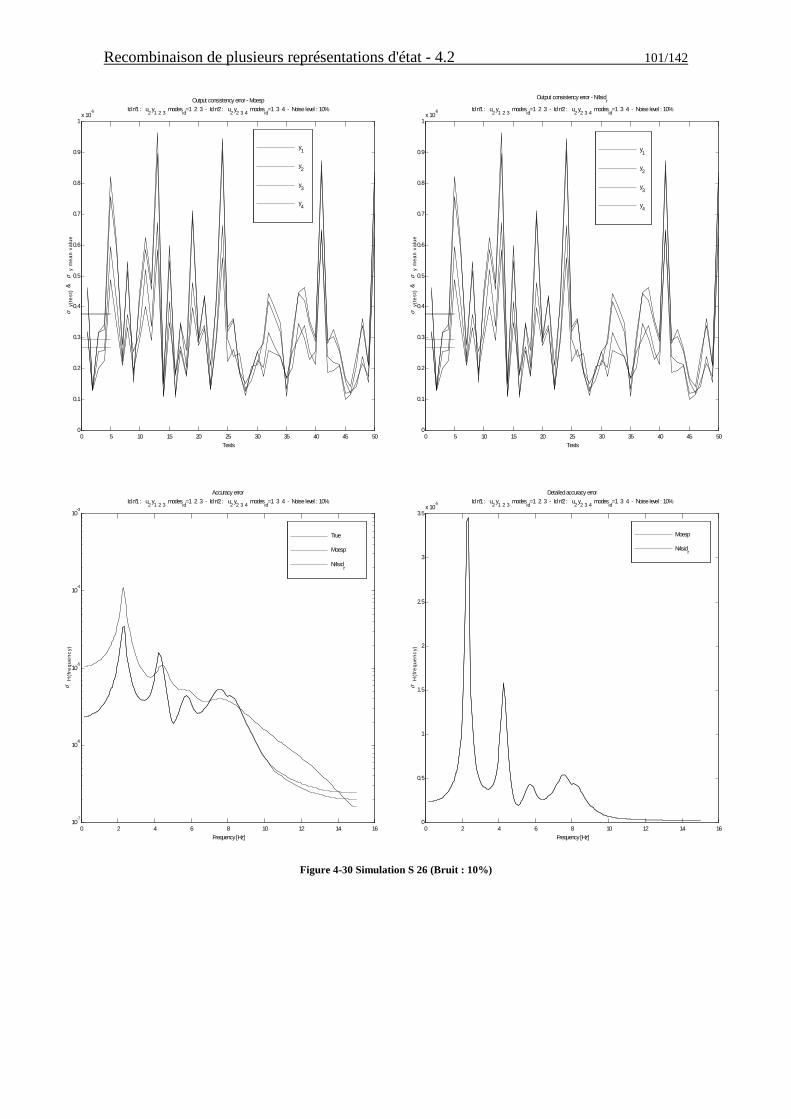
Recombinaison de plusieurs représentations d'état - 4.2 101/142
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-6
Output consistency error - MoespId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-6
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5
3
3.5x 10
-5
Detailed accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 3 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-30 Simulation S 26 (Bruit : 10%)
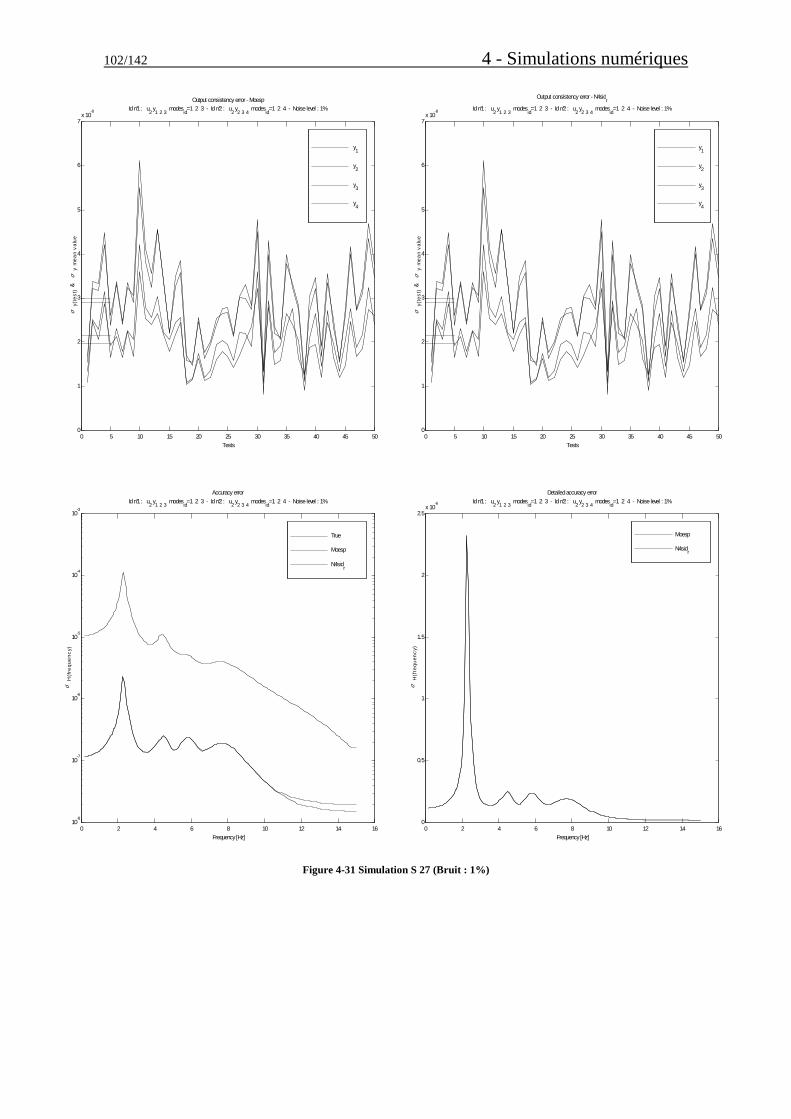
102/142 4 - Simulations numériques
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7x 10
-8
Output consistency error - MoespId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 1%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7x 10
-8
Output consistency error - N4sidr
Id n°1 : u2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 1%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-8
10-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
0 2 4 6 8 10 12 14 160
0.5
1
1.5
2
2.5x 10
-6
Detailed accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 1%
Frequency [Hz]
σH
(fre
qu
en
cy)
Moesp
N4sidr
Figure 4-31 Simulation S 27 (Bruit : 1%)
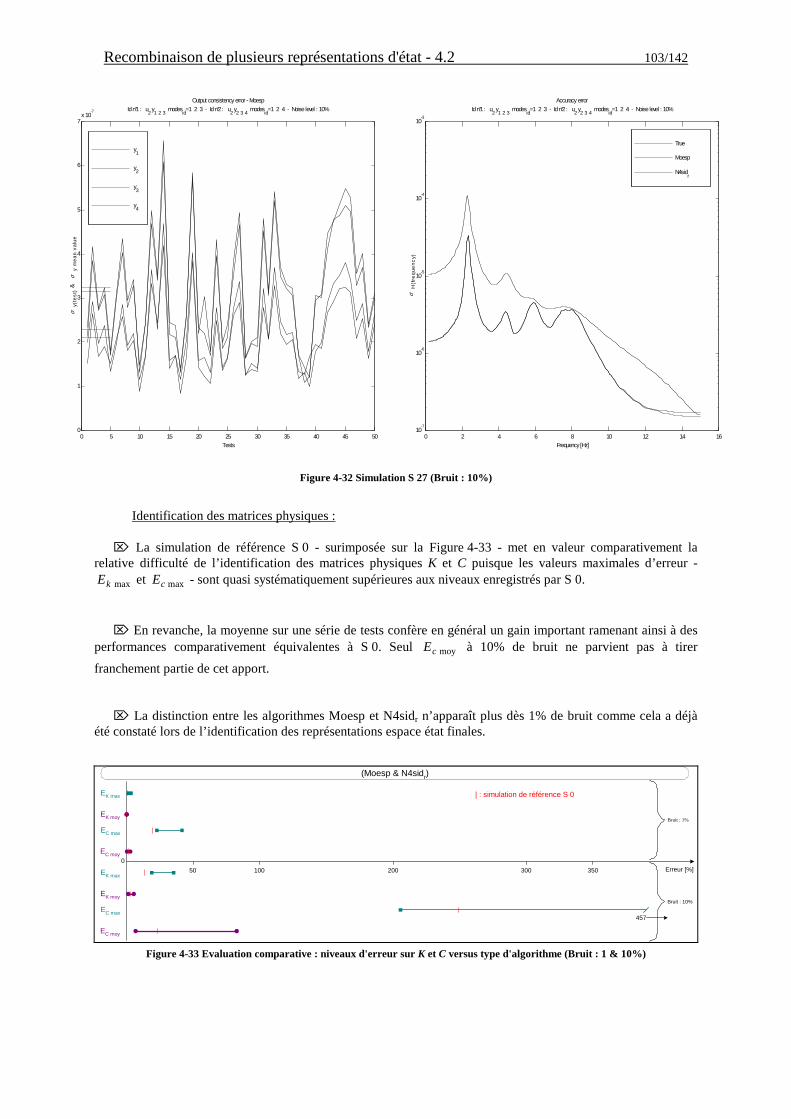
Recombinaison de plusieurs représentations d'état - 4.2 103/142
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7x 10
-7
Output consistency error - MoespId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 10%
Tests
σy(
tes
t) &
σ
y m
ea
n v
alu
e
y1
y2
y3
y4
0 2 4 6 8 10 12 14 1610
-7
10-6
10-5
10-4
10-3
Accuracy errorId n°1 : u
2 y
1 2 3 modes
id=1 2 3 - Id n°2 : u
2 y
2 3 4 modes
id=1 2 4 - Noise level : 10%
Frequency [Hz]
σH
(fre
qu
en
cy)
True
Moesp
N4sidr
Figure 4-32 Simulation S 27 (Bruit : 10%)
Identification des matrices physiques :
La simulation de référence S 0 - surimposée sur la Figure 4-33 - met en valeur comparativement la relative difficulté de l’identification des matrices physiques K et C puisque les valeurs maximales d’erreur - Ek max et Ec max - sont quasi systématiquement supérieures aux niveaux enregistrés par S 0.
En revanche, la moyenne sur une série de tests confère en général un gain important ramenant ainsi à des performances comparativement équivalentes à S 0. Seul Ec moy à 10% de bruit ne parvient pas à tirer
franchement partie de cet apport.
La distinction entre les algorithmes Moesp et N4sidr n’apparaît plus dès 1% de bruit comme cela a déjà été constaté lors de l’identification des représentations espace état finales.
Bruit : 1%
Bruit : 10%
EK max
EK max
EK moy
EK moy
EC moy
EC moy
EC max
EC max
Erreur [%]0
50 100 200 300 350
(Moesp & N4sidr)
| : simulation de référence S 0
457
Figure 4-33 Evaluation comparative : niveaux d'erreur sur K et C versus type d'algorithme (Bruit : 1 & 10%)

104/142 4 - Simulations numériques
4.2.5.3.Bilan
Les simulations entreprises au cours de cette partie pour valider numériquement la troisième méthode de recombinaison mettent en valeur une grande dispersion des résultats associée à une qualité générale assez médiocre dès lors que le niveau de bruit n’est plus négligeable.
Compte tenu que, dans le cadre de cette méthode, la matrice des entrées Bc est déduite directement de M, la
matrice jouant le rôle majeur dans la qualité des résultats est naturellement la matrice d’état Ac .
Cette dernière dépend de la qualité des différentes matrices d’état partielles mais aussi du biais existant entre elles lors de leur ré association. En effet, chaque identification partielle peut s’avérer de bonne qualité mais identifier une perception légèrement différente de la structure. De fait, la recombinaison subséquente va cumuler les biais successifs au sein de la matrice d’état finale. D’autant que l’étape délicate du passage dans la base physique (i.e. le passage discret ⇔ continue et la construction de la matrice de passage P) est directement liée à la qualité des identifications partielles.
Cette analyse justifie probablement les mauvais résultats - avec de fortes dispersions - constatés sur l’écart-type de l’erreur de prédiction au cours de ces simulations.
Pour autant et paradoxalement, l’identification des matrices physiques - C & K - semble ne pas souffrir exagérément de cette procédure et présente - sous réserve de réaliser impérativement une moyenne sur une série de tests - des résultats assez stables même pour un niveau de bruit assez élevé.
Enfin, les deux algorithmes Moesp et N4sidr. présentent des niveaux de résultats en tout point analogues même à 0% de bruit ; constat justifié par un taux d’erreur déjà suffisant pour dissimuler leur différence.
4.2.6.Conclusion Trois méthodes de ré association de « sous représentations » espace état ont été évaluées au cours de cette
étude numérique.
Chacune de ces méthodes impose un environnement théorique et pratique plus ou moins souple pour son exploitation. De manière croissante, plus l’intérêt d’une méthode est avérée (contraintes peu strictes, potentialités importantes), plus celle-ci sollicite les différentes étapes de calcul - et en particulier les algorithmes sous-espace utilisés.
Il n’est donc pas surprenant de constater une dégradation progressive des résultats au fur et à mesure de l’avancement des analyses numériques. Malgré tout, l’ensemble de ces simulations ne semble pas remettre en cause la validité des trois méthodes proposées41.
Une étude exhaustive des multiples paramètres intervenant dans les processus numériques successifs n’ayant point de sens compte tenu des éléments souhaitant être mis en valeur, seuls le nombre des entrées, le nombre des sorties, mais aussi le choix des modes pour ce qui concerne la dernière et troisième méthode ont été retenus comme variables utiles.
Les identifications des représentations espace état issues de la première méthode (1ère et 2ème catégorie) présentent généralement les meilleurs résultats. Bien entendu, le respect des règles énoncées relative à la première catégorie font s’approcher les résultats de l’optimum.
41 …excepté peut être la troisième et dernière méthode qui nécessite des améliorations pour notamment la rendre plus
robuste.
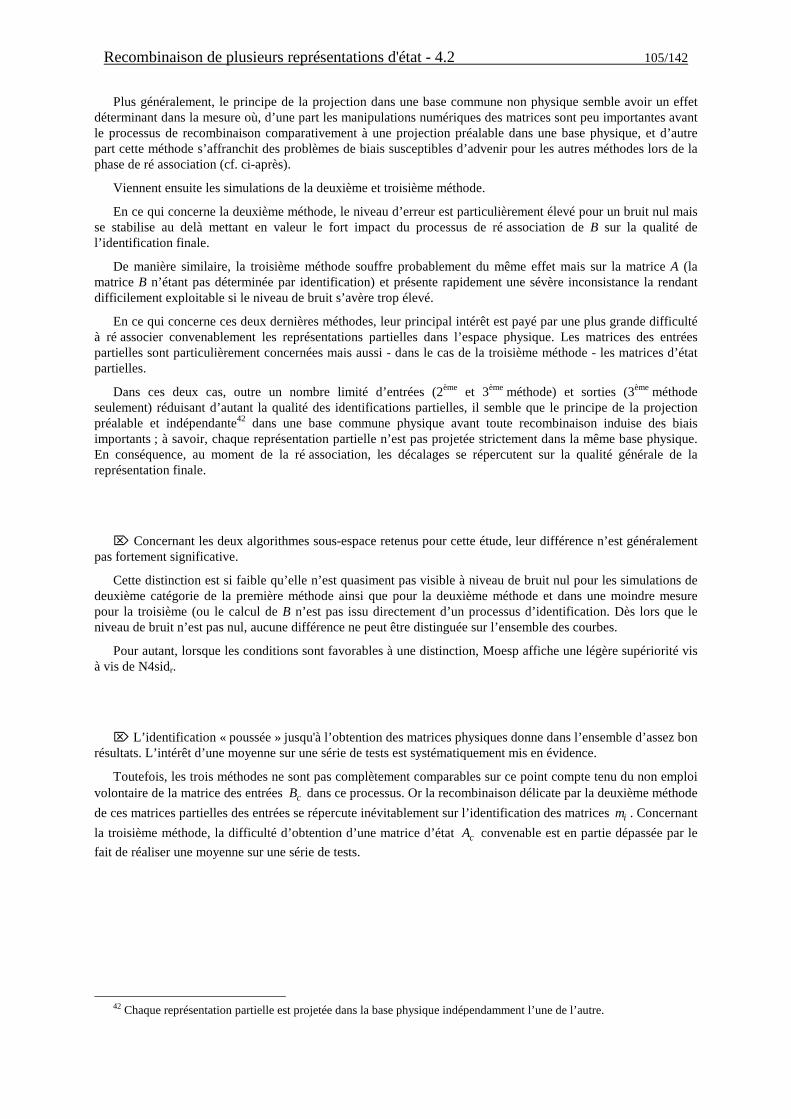
Recombinaison de plusieurs représentations d'état - 4.2 105/142
Plus généralement, le principe de la projection dans une base commune non physique semble avoir un effet déterminant dans la mesure où, d’une part les manipulations numériques des matrices sont peu importantes avant le processus de recombinaison comparativement à une projection préalable dans une base physique, et d’autre part cette méthode s’affranchit des problèmes de biais susceptibles d’advenir pour les autres méthodes lors de la phase de ré association (cf. ci-après).
Viennent ensuite les simulations de la deuxième et troisième méthode.
En ce qui concerne la deuxième méthode, le niveau d’erreur est particulièrement élevé pour un bruit nul mais se stabilise au delà mettant en valeur le fort impact du processus de ré association de B sur la qualité de l’identification finale.
De manière similaire, la troisième méthode souffre probablement du même effet mais sur la matrice A (la matrice B n’étant pas déterminée par identification) et présente rapidement une sévère inconsistance la rendant difficilement exploitable si le niveau de bruit s’avère trop élevé.
En ce qui concerne ces deux dernières méthodes, leur principal intérêt est payé par une plus grande difficulté à ré associer convenablement les représentations partielles dans l’espace physique. Les matrices des entrées partielles sont particulièrement concernées mais aussi - dans le cas de la troisième méthode - les matrices d’état partielles.
Dans ces deux cas, outre un nombre limité d’entrées (2ème et 3ème méthode) et sorties (3ème méthode seulement) réduisant d’autant la qualité des identifications partielles, il semble que le principe de la projection préalable et indépendante42 dans une base commune physique avant toute recombinaison induise des biais importants ; à savoir, chaque représentation partielle n’est pas projetée strictement dans la même base physique. En conséquence, au moment de la ré association, les décalages se répercutent sur la qualité générale de la représentation finale.
Concernant les deux algorithmes sous-espace retenus pour cette étude, leur différence n’est généralement pas fortement significative.
Cette distinction est si faible qu’elle n’est quasiment pas visible à niveau de bruit nul pour les simulations de deuxième catégorie de la première méthode ainsi que pour la deuxième méthode et dans une moindre mesure pour la troisième (ou le calcul de B n’est pas issu directement d’un processus d’identification. Dès lors que le niveau de bruit n’est pas nul, aucune différence ne peut être distinguée sur l’ensemble des courbes.
Pour autant, lorsque les conditions sont favorables à une distinction, Moesp affiche une légère supériorité vis à vis de N4sidr.
L’identification « poussée » jusqu'à l’obtention des matrices physiques donne dans l’ensemble d’assez bon résultats. L’intérêt d’une moyenne sur une série de tests est systématiquement mis en évidence.
Toutefois, les trois méthodes ne sont pas complètement comparables sur ce point compte tenu du non emploi volontaire de la matrice des entrées Bc dans ce processus. Or la recombinaison délicate par la deuxième méthode
de ces matrices partielles des entrées se répercute inévitablement sur l’identification des matrices mi . Concernant
la troisième méthode, la difficulté d’obtention d’une matrice d’état Ac convenable est en partie dépassée par le
fait de réaliser une moyenne sur une série de tests.
42 Chaque représentation partielle est projetée dans la base physique indépendamment l’une de l’autre.
107/142
5. Evaluations expérimentales
L’ensemble des résultats expérimentaux obtenus et rapportés dans ce chapitre ont été effectués au sein du Laboratoire de Mécanique et Génie Civil (LMGC) de l’Université des Sciences Montpellier II.
La première partie de ce chapitre détaille les conditions matérielles des expérimentations.
Ensuite sont abordés, dans une deuxième section, les critères d’évaluation susceptibles d’être utilisés pour apprécier les performances des différents algorithmes et méthodes traités dans la suite de ce chapitre.
Viennent ensuite, dans les deux parties suivantes, deux phases expérimentales relatives :
◊ d’une part à l’étude du processus d’identification autonome de la matrice physique lorsque le nombre
d’entrées est réduit (m< nid ). Celle-ci est menée sur une poutre cantilever volontairement réduite à deux nœuds (donc deux modes) dont on fait varier les masses.
◊ d’autre part à l’analyse des trois méthodes de recombinaison de représentations partielles. Une poutre cantilever - pour laquelle les quatre premiers modes ont été conservés - a été l’objet de l’étude.
Le traitement numérique des signaux résultant des acquisitions est effectué sur le logiciel Matlab®. L’étape fondamentale de la réalisation d’un modèle espace état à partir des entrées et sorties est confiée aux deux algorithmes sous-espace N4sidr et Moesp.
5.1. Environnement expérimental Ne disposant pas à ce jour d’une chaîne de mesure complète et intégrée, c’est donc une série de matériels
individuels qui ont été utilisés. Ci-après sont précisés les différents matériels exploités classés par catégorie.
◊ Capteurs (Figure 5-1 & Figure 5-2) :
Figure 5-1 Accéléromètre et tête d'impédance
• Accéléromètres : type 4338, 4332 & 4370 de Brüel & Kjaer (collés à la cire).
108/142 5 - Evaluations expérimentales
• Tête d’impédance : type 8200 de Brüel & Kjaer.
◊ Excitation :
• Pot vibrant (Figure 5-2) : type 4809 de Brüel & Kjaer (45 N - 10 Hz à 20 kHz - 8.3 kg - équipage mobile : 60 g).
• Amplificateur de puissance : type 3384-060 de Brüel & Kjaer.
Figure 5-2 Pot vibrant
◊ Amplification, intégrations et traitement (Figure 5-3) :
• Amplificateurs de charge : type 2651 & 2635 de Brüel & Kjaer.
• Ordinateur : Toshiba 4800 CT, 486DX, 8Mo de RAM.
• Carte d’extension pour acquisitions : carte DT 31-EZ (non DSP) de Data Translation avec boîte intermédiaire de connexion et câble nappe non blindé.
• Logiciel d’acquisition : DT VEE 3.12 for Windows® de Data Translation.
Figure 5-3 Amplification, intégrations et traitement
Le pot vibrant est suspendu par des tendeurs à un cadre métallique. Par ailleurs et à défaut d’un matériel plus adapté, la nécessité de disposer pour une poutre d’un encastrement « suffisamment » rigide a conduit à fixer de forts profils métalliques en U à même la dalle du sol (Figure 5-4).
Environnement expérimental - 5.1 109/142
Figure 5-4 Suspension et encastrement
5.2. Evaluation des résultats L’évaluation des résultats s’appuie en autres sur les aspects suivants :
1) L’analyse comparative des diverses méthodes et algorithmes utilisés. Outre les comparaisons possibles entre les signaux vrais et reconstitués à partir des différentes représentations d’état identifiées, un critère plus quantitatif peut être mis en œuvre et exploité : le critère MAC (§ 5.2.1).
2) L’estimation de la qualité d’identification de chaque pôle : pour ce faire, il est possible d’utiliser l’indicateur de cohérence d’observabilité (§ 5.2.2).
3) Par ailleurs, dans le cadre d’une comparaison à une représentation espace état de référence, les erreurs de consistance et d’exactitude peuvent être utilisées.
4) L’évaluation de la qualité des matrices physiques ; lorsque l’étude se veut exhaustive sur ce point, une série de 25 tests est entreprise43 ; simultanément sont extraites pour chaque matrice physique la moyenne sur la série de tests et les valeurs extrêmes (min. et max.). Ces dernières valeurs sont à même de fournir une information très utile sur la consistance des résultats obtenus.
43 Les simulations numériques ont mis nettement en exergue l’intérêt d’une moyenne sur un ensemble de tests.
110/142 5 - Evaluations expérimentales
De plus, les copies des signaux obtenus ont systématiquement été filtrées par une fenêtre de Hanning (filtre classique en analyse dynamique). Les calculs d'identification ont ainsi pu être menés simultanément avec les données brutes et filtrées permettant de mettre en valeur l'intérêt éventuel d'un filtrage de ce type.
5.2.1.Critère MAC (Modal Assurance Criteria) Ce critère classique [ 15] permet de comparer successivement chacun des modes identifiés obtenus grâce à
deux méthodes différentes. Il effectue un calcul de corrélation sur les vecteurs modaux et est à ce titre assez sensible. Soient Vk 1 et Vk 2 les vecteurs modaux du mode k obtenus successivement par les deux méthodes 1 et
2, il vient alors :
( ) ( )
( ) ( )( ) ( )MAC
V V
V V V Vk
k
T
k
k
T
k k
T
k
=
1 2
2
1 1 2 2
( 5-1)
La valeur MACk comprise en 0 et 1 est d’autant meilleure qu’elle se situe à proximité de 1.
5.2.2.Indicateur de cohérence d’observabilité Cet indicateur (Observability Coherence Indicator - OCI) [ 35] compare les matrices d’observabilité obtenues
d’une part directement grâce aux données expérimentales - Γi - et d’autre part calculées à partir des matrices A
et C du modèle espace état identifié -Γic . Ce critère OCI, vecteur de dimension n, fournit une information sur la
qualité de chaque fréquence identifiée.
[ ]( )( )
( ) ( )OCI
V V
V V V V
n
ic T
i
ic T
ic
i
T
i
,1 12
=
Γ Γ
Γ Γ Γ Γ
( 5-2)
où V est la matrice modale qui diagonalise A telle que A VA Vdiag= −1 .
Il s’avère à la pratique que cet indicateur n’est pas très performant du fait de la très faible différence44 constatée entre les deux matrices d’observabilité, identifiée et calculée.
44 …ou carrément l’absence de différence : c’est le cas de N4sidr (§ 3.3.2.1) qui recalcule justement sa matrice
d’observabilité.
5.3. Identification autonome des matrices physiques
Le but de cette expérimentation est de mettre en valeur les capacités expérimentales du processus d’identification autonome des matrices physiques tel qu’il est proposé en 2.2 ; à savoir avec un seul excitateur (une entrée).
L’expérimentation est menée sur une poutre aluminium de 2.35 m, travaillant sur sa plus grande inertie (section extérieure 8 sur 4 cm - épaisseur 4 mm) encastrée à une extrémité et libre à l’autre. Un système relationnel simple constitué de 2 nœuds (donc 2 modes) et 2 éléments est établi fournissant la représentation de la Figure 5-5.
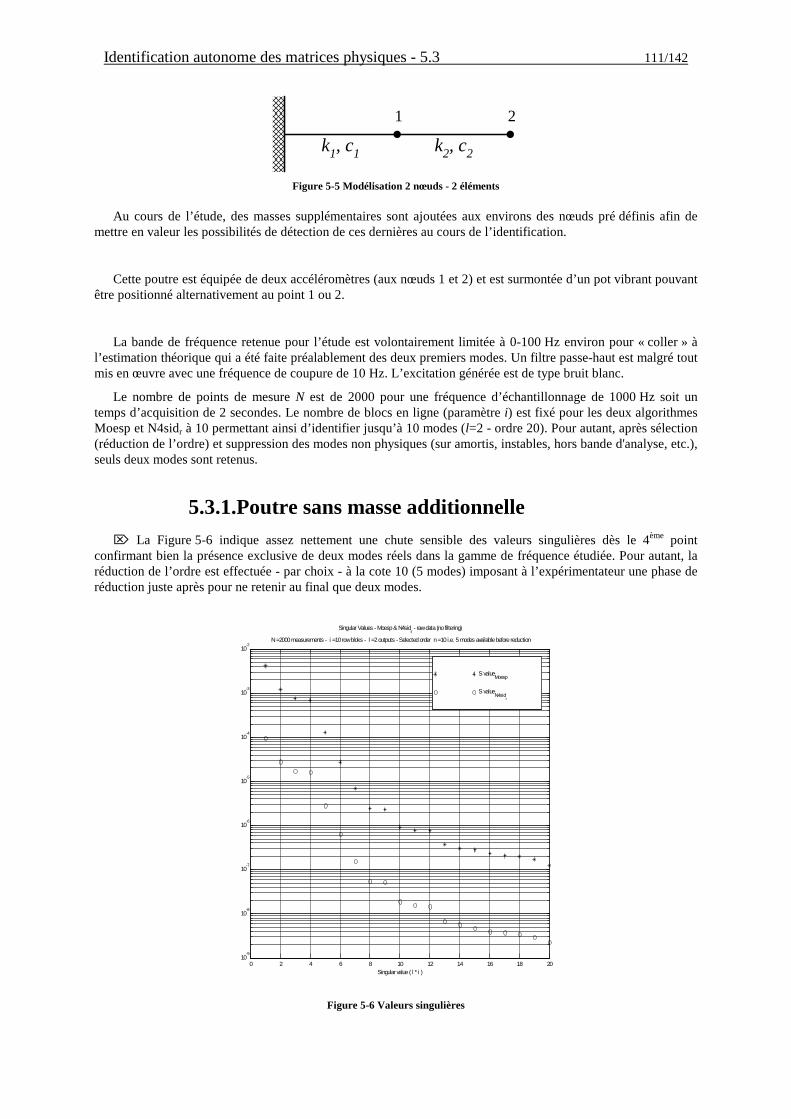
Identification autonome des matrices physiques - 5.3 111/142
k1, c1 k2, c2
1 2
Figure 5-5 Modélisation 2 nœuds - 2 éléments
Au cours de l’étude, des masses supplémentaires sont ajoutées aux environs des nœuds pré définis afin de mettre en valeur les possibilités de détection de ces dernières au cours de l’identification.
Cette poutre est équipée de deux accéléromètres (aux nœuds 1 et 2) et est surmontée d’un pot vibrant pouvant être positionné alternativement au point 1 ou 2.
La bande de fréquence retenue pour l’étude est volontairement limitée à 0-100 Hz environ pour « coller » à l’estimation théorique qui a été faite préalablement des deux premiers modes. Un filtre passe-haut est malgré tout mis en œuvre avec une fréquence de coupure de 10 Hz. L’excitation générée est de type bruit blanc.
Le nombre de points de mesure N est de 2000 pour une fréquence d’échantillonnage de 1000 Hz soit un temps d’acquisition de 2 secondes. Le nombre de blocs en ligne (paramètre i) est fixé pour les deux algorithmes Moesp et N4sidr à 10 permettant ainsi d’identifier jusqu’à 10 modes (l=2 - ordre 20). Pour autant, après sélection (réduction de l’ordre) et suppression des modes non physiques (sur amortis, instables, hors bande d'analyse, etc.), seuls deux modes sont retenus.
5.3.1.Poutre sans masse additionnelle La Figure 5-6 indique assez nettement une chute sensible des valeurs singulières dès le 4ème point
confirmant bien la présence exclusive de deux modes réels dans la gamme de fréquence étudiée. Pour autant, la réduction de l’ordre est effectuée - par choix - à la cote 10 (5 modes) imposant à l’expérimentateur une phase de réduction juste après pour ne retenir au final que deux modes.
0 2 4 6 8 10 12 14 16 18 2010
-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
Singular Values - Moesp & N4sidr - raw data (no filtering)
N =2000 measurements - i =10 row bloks - l =2 outputs - Selected order n =10 i.e. 5 modes available before reduction
Singular value ( l * i )
S valueMoesp
S valueN4sid
r
Figure 5-6 Valeurs singulières
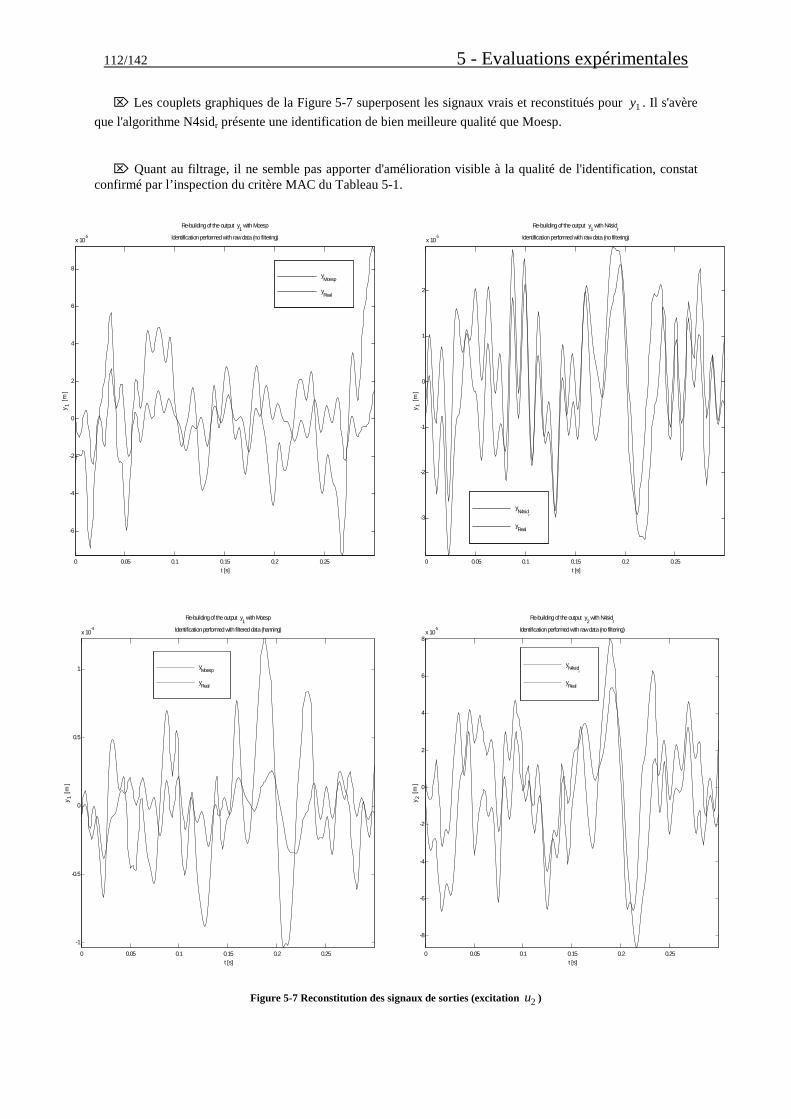
112/142 5 - Evaluations expérimentales
Les couplets graphiques de la Figure 5-7 superposent les signaux vrais et reconstitués pour y1 . Il s'avère
que l'algorithme N4sidr présente une identification de bien meilleure qualité que Moesp.
Quant au filtrage, il ne semble pas apporter d'amélioration visible à la qualité de l'identification, constat confirmé par l’inspection du critère MAC du Tableau 5-1.
0 0.05 0.1 0.15 0.2 0.25
-6
-4
-2
0
2
4
6
8
x 10-5
Re-building of the output y1 with Moesp
Identification performed with raw data (no filtering)
t [s]
y1 [
m]
yMoesp
yReal
0 0.05 0.1 0.15 0.2 0.25
-3
-2
-1
0
1
2
x 10-5
Re-building of the output y1 with N4sid
r
Identification performed with raw data (no filtering)
t [s]
y1 [
m]
yN4sid
r
yReal
0 0.05 0.1 0.15 0.2 0.25
-1
-0.5
0
0.5
1
x 10-4
Re-building of the output y1 with Moesp
Identification performed with filtered data (hanning)
t [s]
y1 [
m]
yMoesp
yReal
0 0.05 0.1 0.15 0.2 0.25
-8
-6
-4
-2
0
2
4
6
8x 10
-5
Re-building of the output y2 with N4sid
r
Identification performed with raw data (no filtering)
t [s]
y2 [
m]
yN4sid
r
yReal
Figure 5-7 Reconstitution des signaux de sorties (excitation u2 )

Identification autonome des matrices physiques - 5.3 113/142
Moesp N4sidr
MACMode 1
Mode 2
10000
10000
.
.
10000
10000
.
.
Tableau 5-1 Critère MAC - comparaison données brutes/filtrées
Les résultats présentés par la Figure 5-8 mettent en valeur la bonne consistance des identifications des modes. A noter que l'identification de la matrice d'état A - contenant l'information sur les fréquences, taux d'amortissement et vecteurs modaux - est quasi identique pour Moesp et N4sidr. Et c’est pourquoi les très faibles différences constatées ne justifient pas deux tracés différents.
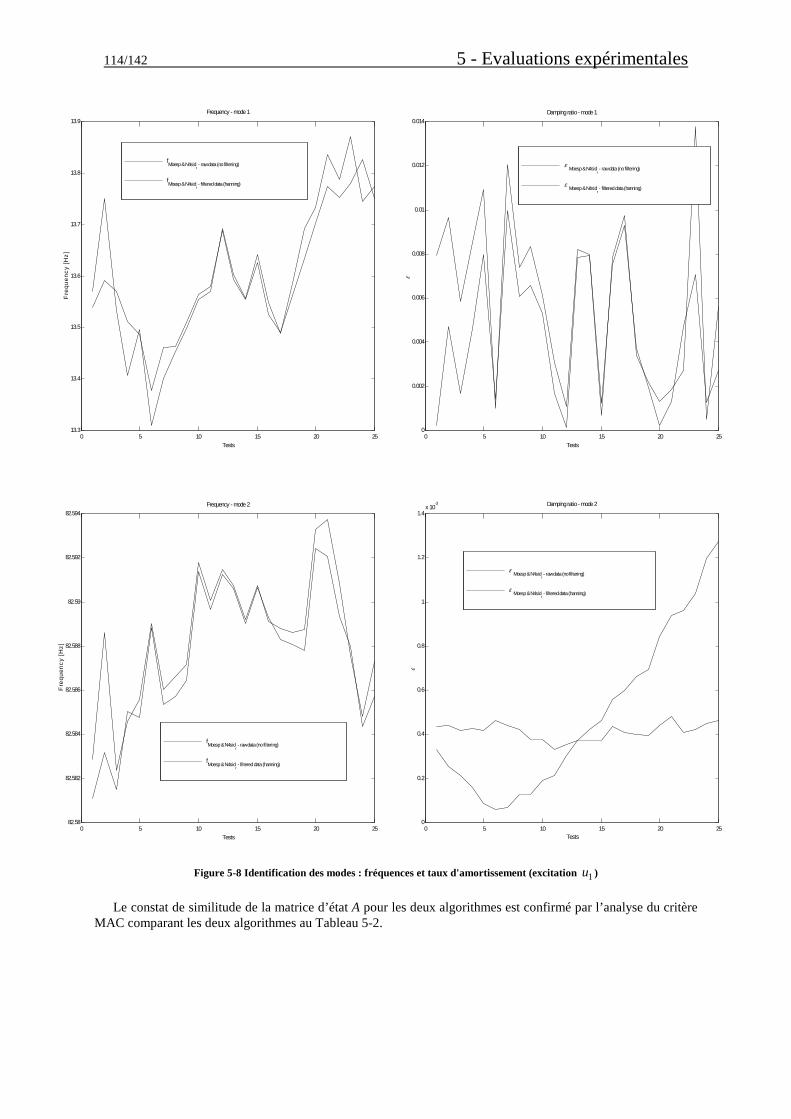
114/142 5 - Evaluations expérimentales
0 5 10 15 20 2513.3
13.4
13.5
13.6
13.7
13.8
13.9
Frequency - mode 1
Tests
Fre
qu
en
cy
[Hz
]
fMoesp & N4sid
r - raw data (no filtering)
fMoesp & N4sid
r - filtered data (hanning)
0 5 10 15 20 250
0.002
0.004
0.006
0.008
0.01
0.012
0.014Damping ratio - mode 1
Tests
ε
εMoesp & N4sid
r - raw data (no filtering)
εMoesp & N4sid
r - filtered data (hanning)
0 5 10 15 20 2582.58
82.582
82.584
82.586
82.588
82.59
82.592
82.594Frequency - mode 2
Tests
Fre
qu
en
cy
[Hz
]
fMoesp & N4sid
r - raw data (no filtering)
fMoesp & N4sid
r - filtered data (hanning)
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-3 Damping ratio - mode 2
Tests
ε
εMoesp & N4sid
r - raw data (no filtering)
εMoesp & N4sid
r - filtered data (hanning)
Figure 5-8 Identification des modes : fréquences et taux d'amortissement (excitation u1 )
Le constat de similitude de la matrice d’état A pour les deux algorithmes est confirmé par l’analyse du critère MAC comparant les deux algorithmes au Tableau 5-2.

Identification autonome des matrices physiques - 5.3 115/142
Données brutes Données filtrées
MACMode 1
Mode 2
0 9998
0 9988
.
.
0 9938
0 9943
.
.
Tableau 5-2 Critère MAC - comparaison Moesp/N4sidr
La Figure 5-9 donne une idée de la consistance des résultats lors de l’identification autonome du terme de masse m1 . L’algorithme Moesp présente des difficultés issues de la mauvaise identification de la matrice B. En
revanche, des résultats beaucoup plus stables sont obtenus par l’algorithme N4sidr.
0 5 10 15 20 25-20
0
20
40
60
80
100
Identified masses corresponding to the input u1
Both raw data (no filtering) or filtered data (hanning) are used
Tests
Ma
ss
1 [
kg
]
mMoesp - raw data (no filtering)
mMoesp - filtered data (hanning)
mN4sid
r - raw data (no filtering)
mN4sid
r - filtered data (hanning)
Figure 5-9 Identification autonome de m1 (excitation u1 )
Une fois l’une des masses élémentaires obtenue, l’identification complète de toutes les matrices physiques est possible. Les résultats sont fournis dans le Tableau 5-3.
A noter que l’expérimentation menée avec une excitation positionnée en u2 n’a pas donné de résultats
satisfaisants quant à l’identification des matrices physiques.
Vu l’identification peu fiable de m1 avec Moesp, l’identification globale de la matrice masse M est
logiquement peu consistante avec, en conséquence, des matrices K et C correspondantes de mauvaise qualité. Ces dernières n’ont pas été reportées dans le tableau.
En revanche, N4sidr procure des matrices physiques de bonne facture et relativement consistantes. L’écart entre les valeurs min. et max. sont assez faibles.
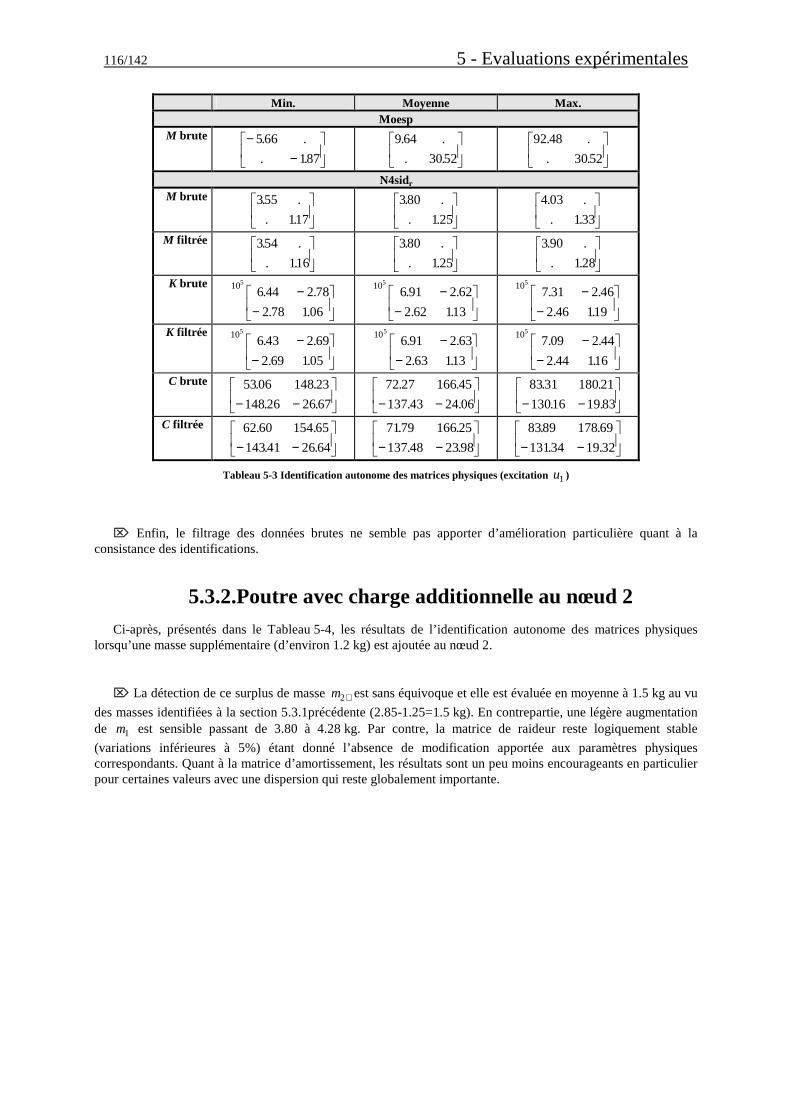
116/142 5 - Evaluations expérimentales
Min. Moyenne Max. Moesp
M brute −−
566
187
. .
. .
9 64
3052
. .
. .
92 48
3052
. .
. .
N4sidr M brute 355
117
. .
. .
380
125
. .
. .
4 03
133
. .
. .
M filtrée 354
116
. .
. .
380
125
. .
. .
390
128
. .
. .
K brute 105
6 44 2 78
2 78 106
. .
. .
−−
105
6 91 2 62
2 62 113
. .
. .
−−
105
7 31 2 46
2 46 119
. .
. .
−−
K filtrée 105
6 43 2 69
2 69 105
. .
. .
−−
105
6 91 2 63
2 63 113
. .
. .
−−
105
7 09 2 44
2 44 116
. .
. .
−−
C brute 5306 148 23
148 26 26 67
. .
. .− −
72 27 166 45
137 43 24 06
. .
. .− −
8331 180 21
13016 19 83
. .
. .− −
C filtrée 62 60 154 65
14341 26 64
. .
. .− −
7179 166 25
137 48 2398
. .
. .− −
8389 178 69
13134 19 32
. .
. .− −
Tableau 5-3 Identification autonome des matrices physiques (excitation u1 )
Enfin, le filtrage des données brutes ne semble pas apporter d’amélioration particulière quant à la consistance des identifications.
5.3.2.Poutre avec charge additionnelle au nœud 2 Ci-après, présentés dans le Tableau 5-4, les résultats de l’identification autonome des matrices physiques
lorsqu’une masse supplémentaire (d’environ 1.2 kg) est ajoutée au nœud 2.
La détection de ce surplus de masse m2+ est sans équivoque et elle est évaluée en moyenne à 1.5 kg au vu
des masses identifiées à la section 5.3.1précédente (2.85-1.25=1.5 kg). En contrepartie, une légère augmentation de m1 est sensible passant de 3.80 à 4.28 kg. Par contre, la matrice de raideur reste logiquement stable
(variations inférieures à 5%) étant donné l’absence de modification apportée aux paramètres physiques correspondants. Quant à la matrice d’amortissement, les résultats sont un peu moins encourageants en particulier pour certaines valeurs avec une dispersion qui reste globalement importante.
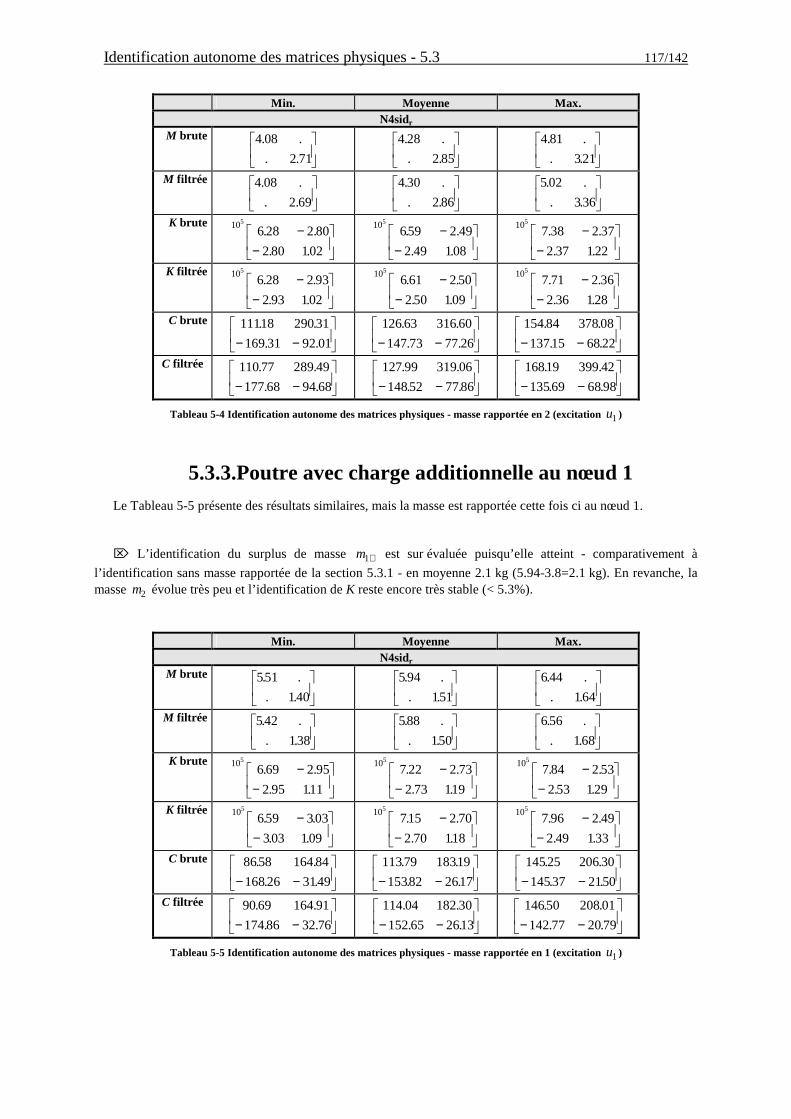
Identification autonome des matrices physiques - 5.3 117/142
Min. Moyenne Max. N4sidr
M brute 4 08
2 71
. .
. .
4 28
2 85
. .
. .
4 81
321
. .
. .
M filtrée 4 08
2 69
. .
. .
4 30
2 86
. .
. .
502
336
. .
. .
K brute 105
6 28 2 80
2 80 102
. .
. .
−−
105
659 2 49
2 49 108
. .
. .
−−
105
7 38 2 37
2 37 122
. .
. .
−−
K filtrée 105
6 28 2 93
2 93 102
. .
. .
−−
105
6 61 2 50
2 50 109
. .
. .
−−
105
7 71 2 36
2 36 128
. .
. .
−−
C brute 11118 29031
169 31 92 01
. .
. .− −
126 63 316 60
147 73 77 26
. .
. .− −
154 84 378 08
13715 68 22
. .
. .− −
C filtrée 110 77 289 49
177 68 94 68
. .
. .− −
127 99 319 06
14852 7786
. .
. .− −
16819 399 42
13569 68 98
. .
. .− −
Tableau 5-4 Identification autonome des matrices physiques - masse rapportée en 2 (excitation u1 )
5.3.3.Poutre avec charge additionnelle au nœud 1 Le Tableau 5-5 présente des résultats similaires, mais la masse est rapportée cette fois ci au nœud 1.
L’identification du surplus de masse m1+ est sur évaluée puisqu’elle atteint - comparativement à
l’identification sans masse rapportée de la section 5.3.1 - en moyenne 2.1 kg (5.94-3.8=2.1 kg). En revanche, la masse m2 évolue très peu et l’identification de K reste encore très stable (< 5.3%).
Min. Moyenne Max. N4sidr
M brute 551
140
. .
. .
594
151
. .
. .
644
164
. .
. .
M filtrée 542
138
. .
. .
588
150
. .
. .
656
168
. .
. .
K brute 105
6 69 2 95
2 95 111
. .
. .
−−
105
7 22 2 73
2 73 119
. .
. .
−−
105
7 84 2 53
2 53 129
. .
. .
−−
K filtrée 105
659 303
303 109
. .
. .
−−
105
715 2 70
2 70 118
. .
. .
−−
105
7 96 2 49
2 49 133
. .
. .
−−
C brute 8658 164 84
168 26 3149
. .
. .− −
11379 18319
15382 2617
. .
. .− −
14525 206 30
14537 2150
. .
. .− −
C filtrée 90 69 164 91
174 86 32 76
. .
. .− −
114 04 182 30
152 65 2613
. .
. .− −
14650 208 01
142 77 20 79
. .
. .− −
Tableau 5-5 Identification autonome des matrices physiques - masse rapportée en 1 (excitation u1 )
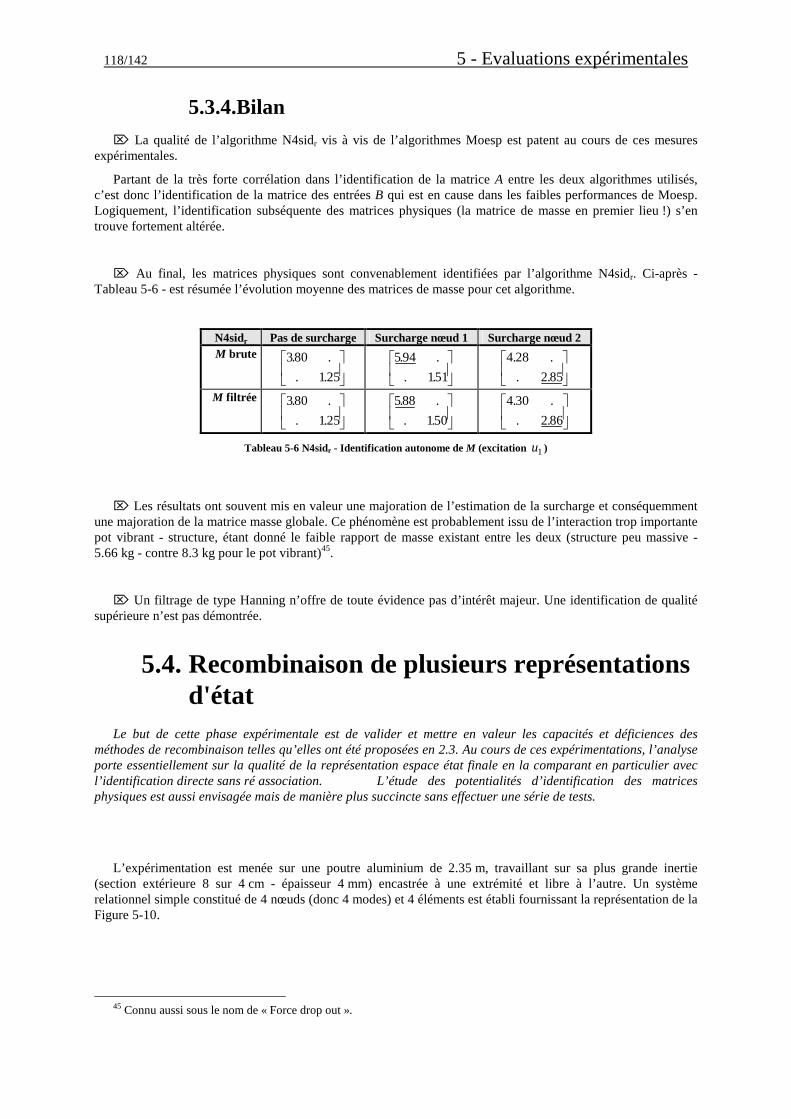
118/142 5 - Evaluations expérimentales
5.3.4.Bilan La qualité de l’algorithme N4sidr vis à vis de l’algorithmes Moesp est patent au cours de ces mesures
expérimentales.
Partant de la très forte corrélation dans l’identification de la matrice A entre les deux algorithmes utilisés, c’est donc l’identification de la matrice des entrées B qui est en cause dans les faibles performances de Moesp. Logiquement, l’identification subséquente des matrices physiques (la matrice de masse en premier lieu !) s’en trouve fortement altérée.
Au final, les matrices physiques sont convenablement identifiées par l’algorithme N4sidr. Ci-après - Tableau 5-6 - est résumée l’évolution moyenne des matrices de masse pour cet algorithme.
N4sidr Pas de surcharge Surcharge nœud 1 Surcharge nœud 2 M brute 380
125
. .
. .
594
151
. .
. .
4 28
2 85
. .
. .
M filtrée 380
125
. .
. .
588
150
. .
. .
4 30
2 86
. .
. .
Tableau 5-6 N4sidr - Identification autonome de M (excitation u1 )
Les résultats ont souvent mis en valeur une majoration de l’estimation de la surcharge et conséquemment une majoration de la matrice masse globale. Ce phénomène est probablement issu de l’interaction trop importante pot vibrant - structure, étant donné le faible rapport de masse existant entre les deux (structure peu massive - 5.66 kg - contre 8.3 kg pour le pot vibrant)45.
Un filtrage de type Hanning n’offre de toute évidence pas d’intérêt majeur. Une identification de qualité supérieure n’est pas démontrée.
45 Connu aussi sous le nom de « Force drop out ».
5.4. Recombinaison de plusieurs représentations d'état
Le but de cette phase expérimentale est de valider et mettre en valeur les capacités et déficiences des méthodes de recombinaison telles qu’elles ont été proposées en 2.3. Au cours de ces expérimentations, l’analyse porte essentiellement sur la qualité de la représentation espace état finale en la comparant en particulier avec l’identification directe sans ré association. L’étude des potentialités d’identification des matrices physiques est aussi envisagée mais de manière plus succincte sans effectuer une série de tests.
L’expérimentation est menée sur une poutre aluminium de 2.35 m, travaillant sur sa plus grande inertie (section extérieure 8 sur 4 cm - épaisseur 4 mm) encastrée à une extrémité et libre à l’autre. Un système relationnel simple constitué de 4 nœuds (donc 4 modes) et 4 éléments est établi fournissant la représentation de la Figure 5-10.
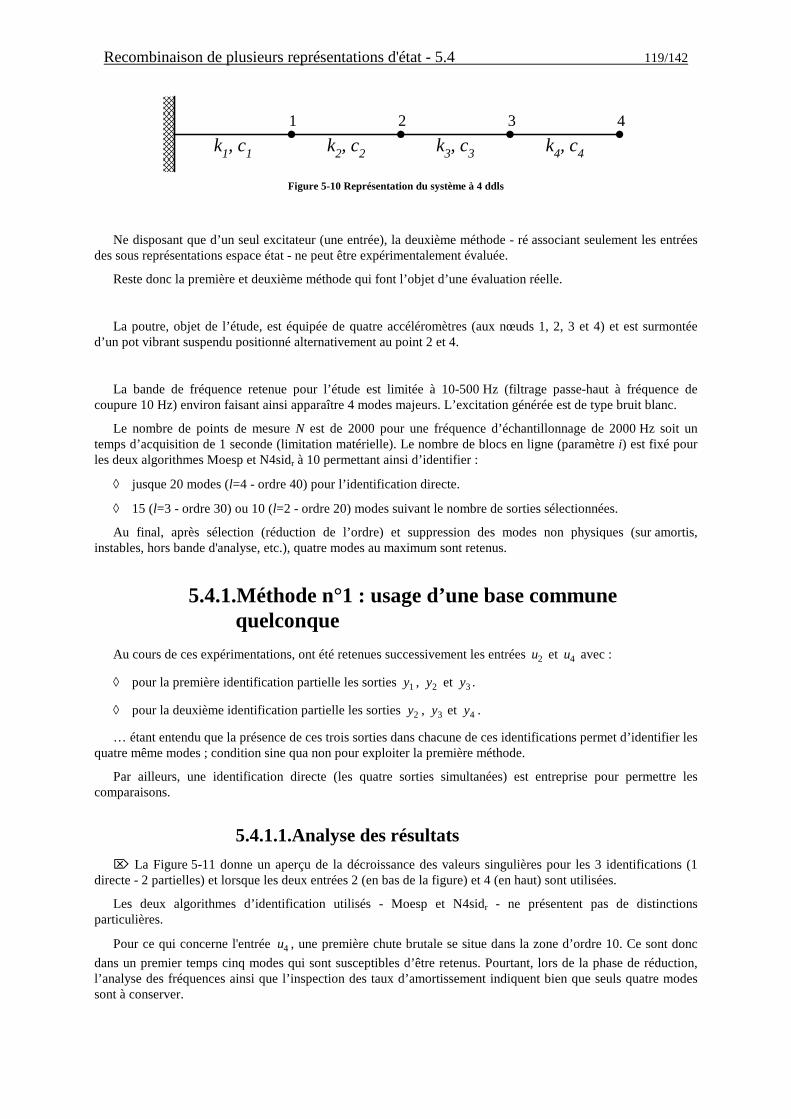
Recombinaison de plusieurs représentations d'état - 5.4 119/142
k1, c1 k2, c2
1 2
k3, c3
3
k4, c4
4
Figure 5-10 Représentation du système à 4 ddls
Ne disposant que d’un seul excitateur (une entrée), la deuxième méthode - ré associant seulement les entrées des sous représentations espace état - ne peut être expérimentalement évaluée.
Reste donc la première et deuxième méthode qui font l’objet d’une évaluation réelle.
La poutre, objet de l’étude, est équipée de quatre accéléromètres (aux nœuds 1, 2, 3 et 4) et est surmontée d’un pot vibrant suspendu positionné alternativement au point 2 et 4.
La bande de fréquence retenue pour l’étude est limitée à 10-500 Hz (filtrage passe-haut à fréquence de coupure 10 Hz) environ faisant ainsi apparaître 4 modes majeurs. L’excitation générée est de type bruit blanc.
Le nombre de points de mesure N est de 2000 pour une fréquence d’échantillonnage de 2000 Hz soit un temps d’acquisition de 1 seconde (limitation matérielle). Le nombre de blocs en ligne (paramètre i) est fixé pour les deux algorithmes Moesp et N4sidr à 10 permettant ainsi d’identifier :
◊ jusque 20 modes (l=4 - ordre 40) pour l’identification directe.
◊ 15 (l=3 - ordre 30) ou 10 (l=2 - ordre 20) modes suivant le nombre de sorties sélectionnées.
Au final, après sélection (réduction de l’ordre) et suppression des modes non physiques (sur amortis, instables, hors bande d'analyse, etc.), quatre modes au maximum sont retenus.
5.4.1.Méthode n°1 : usage d’une base commune quelconque
Au cours de ces expérimentations, ont été retenues successivement les entrées u2 et u4 avec :
◊ pour la première identification partielle les sorties y1 , y2 et y3 .
◊ pour la deuxième identification partielle les sorties y2 , y3 et y4 .
… étant entendu que la présence de ces trois sorties dans chacune de ces identifications permet d’identifier les quatre même modes ; condition sine qua non pour exploiter la première méthode.
Par ailleurs, une identification directe (les quatre sorties simultanées) est entreprise pour permettre les comparaisons.
5.4.1.1.Analyse des résultats
La Figure 5-11 donne un aperçu de la décroissance des valeurs singulières pour les 3 identifications (1 directe - 2 partielles) et lorsque les deux entrées 2 (en bas de la figure) et 4 (en haut) sont utilisées.
Les deux algorithmes d’identification utilisés - Moesp et N4sidr - ne présentent pas de distinctions particulières.
Pour ce qui concerne l'entrée u4 , une première chute brutale se situe dans la zone d’ordre 10. Ce sont donc
dans un premier temps cinq modes qui sont susceptibles d’être retenus. Pourtant, lors de la phase de réduction, l’analyse des fréquences ainsi que l’inspection des taux d’amortissement indiquent bien que seuls quatre modes sont à conserver.
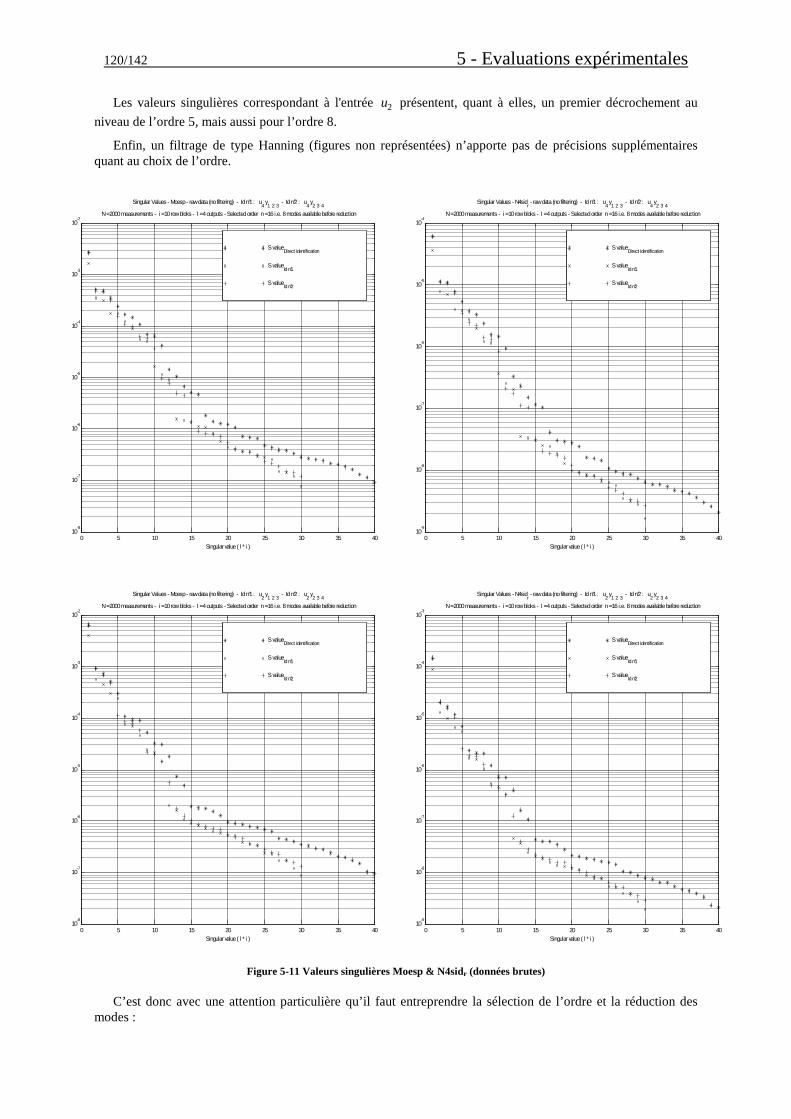
120/142 5 - Evaluations expérimentales
Les valeurs singulières correspondant à l'entrée u2 présentent, quant à elles, un premier décrochement au
niveau de l’ordre 5, mais aussi pour l’ordre 8.
Enfin, un filtrage de type Hanning (figures non représentées) n’apporte pas de précisions supplémentaires quant au choix de l’ordre.
0 5 10 15 20 25 30 35 4010
-8
10-7
10-6
10-5
10-4
10-3
10-2
Singular Values - Moesp - raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
N =2000 measurements - i =10 row bloks - l =4 outputs - Selected order n =16 i.e. 8 modes available before reduction
Singular value ( l * i )
S valueDirect identification
S valueId n°1
S valueId n°2
0 5 10 15 20 25 30 35 4010
-9
10-8
10-7
10-6
10-5
10-4
Singular Values - N4sidr - raw data (no filtering) - Id n°1 : u
4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
N =2000 measurements - i =10 row bloks - l =4 outputs - Selected order n =16 i.e. 8 modes available before reduction
Singular value ( l * i )
S valueDirect identification
S valueId n°1
S valueId n°2
0 5 10 15 20 25 30 35 4010
-8
10-7
10-6
10-5
10-4
10-3
10-2
Singular Values - Moesp - raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
N =2000 measurements - i =10 row bloks - l =4 outputs - Selected order n =16 i.e. 8 modes available before reduction
Singular value ( l * i )
S valueDirect identification
S valueId n°1
S valueId n°2
0 5 10 15 20 25 30 35 4010
-9
10-8
10-7
10-6
10-5
10-4
10-3
Singular Values - N4sidr - raw data (no filtering) - Id n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
N =2000 measurements - i =10 row bloks - l =4 outputs - Selected order n =16 i.e. 8 modes available before reduction
Singular value ( l * i )
S valueDirect identification
S valueId n°1
S valueId n°2
Figure 5-11 Valeurs singulières Moesp & N4sidr (données brutes)
C’est donc avec une attention particulière qu’il faut entreprendre la sélection de l’ordre et la réduction des modes :
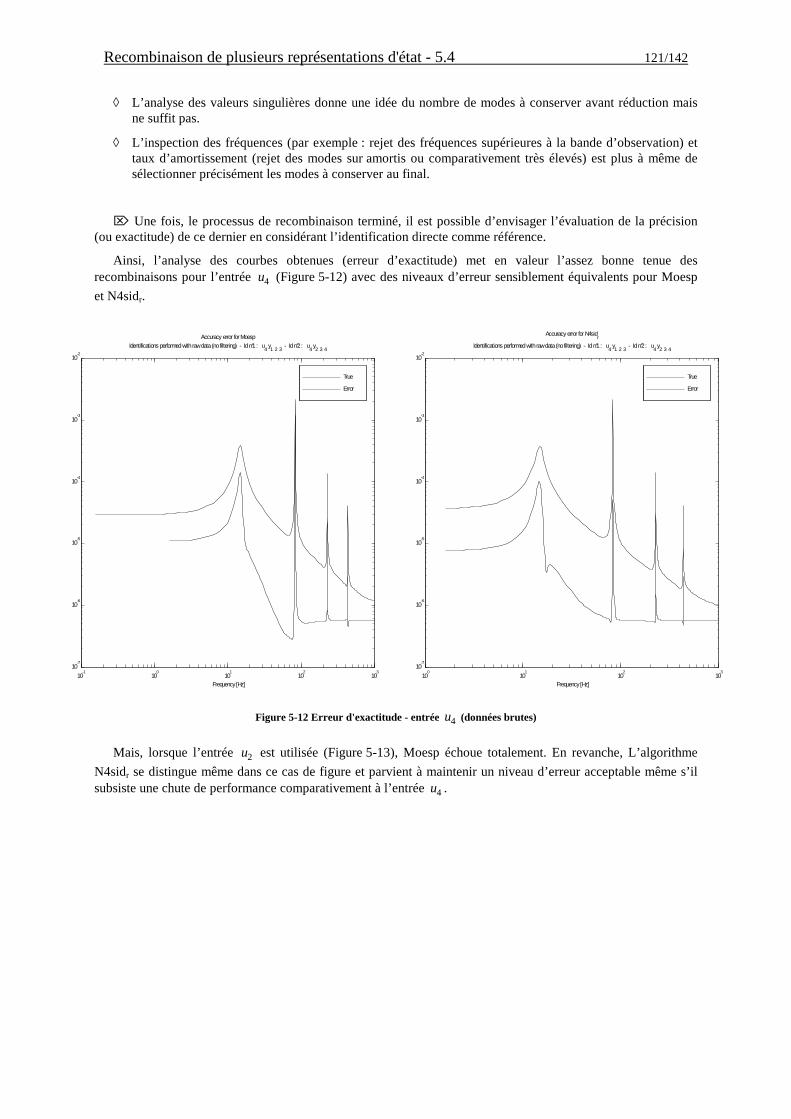
Recombinaison de plusieurs représentations d'état - 5.4 121/142
◊ L’analyse des valeurs singulières donne une idée du nombre de modes à conserver avant réduction mais ne suffit pas.
◊ L’inspection des fréquences (par exemple : rejet des fréquences supérieures à la bande d’observation) et taux d’amortissement (rejet des modes sur amortis ou comparativement très élevés) est plus à même de sélectionner précisément les modes à conserver au final.
Une fois, le processus de recombinaison terminé, il est possible d’envisager l’évaluation de la précision (ou exactitude) de ce dernier en considérant l’identification directe comme référence.
Ainsi, l’analyse des courbes obtenues (erreur d’exactitude) met en valeur l’assez bonne tenue des recombinaisons pour l’entrée u4 (Figure 5-12) avec des niveaux d’erreur sensiblement équivalents pour Moesp
et N4sidr.
10-1
100
101
102
103
10-7
10-6
10-5
10-4
10-3
10-2
Accuracy error for MoespIdentifications performed with raw data (no filtering) - Id n°1 : u
4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
Frequency [Hz]
True
Error
100
101
102
103
10-7
10-6
10-5
10-4
10-3
10-2
Accuracy error for N4sidr
Identifications performed with raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
Frequency [Hz]
True
Error
Figure 5-12 Erreur d'exactitude - entrée u4 (données brutes)
Mais, lorsque l’entrée u2 est utilisée (Figure 5-13), Moesp échoue totalement. En revanche, L’algorithme
N4sidr se distingue même dans ce cas de figure et parvient à maintenir un niveau d’erreur acceptable même s’il subsiste une chute de performance comparativement à l’entrée u4 .
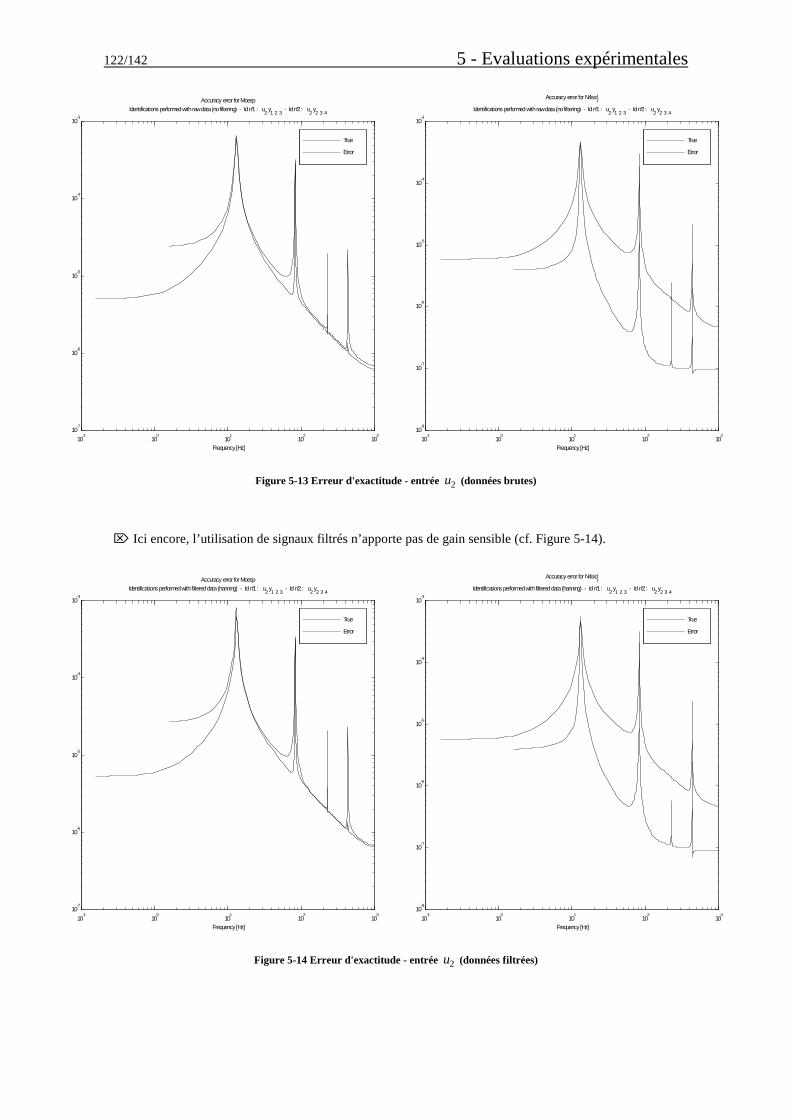
122/142 5 - Evaluations expérimentales
10-1
100
101
102
103
10-7
10-6
10-5
10-4
10-3
Accuracy error for MoespIdentifications performed with raw data (no filtering) - Id n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
Frequency [Hz]
True
Error
10-1
100
101
102
103
10-8
10-7
10-6
10-5
10-4
10-3
Accuracy error for N4sidr
Identifications performed with raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
Frequency [Hz]
True
Error
Figure 5-13 Erreur d'exactitude - entrée u2 (données brutes)
Ici encore, l’utilisation de signaux filtrés n’apporte pas de gain sensible (cf. Figure 5-14).
10-1
100
101
102
103
10-7
10-6
10-5
10-4
10-3
Accuracy error for MoespIdentifications performed with filtered data (hanning) - Id n°1 : u
2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
Frequency [Hz]
True
Error
10-1
100
101
102
103
10-8
10-7
10-6
10-5
10-4
10-3
Accuracy error for N4sidr
Identifications performed with filtered data (hanning) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
Frequency [Hz]
True
Error
Figure 5-14 Erreur d'exactitude - entrée u2 (données filtrées)
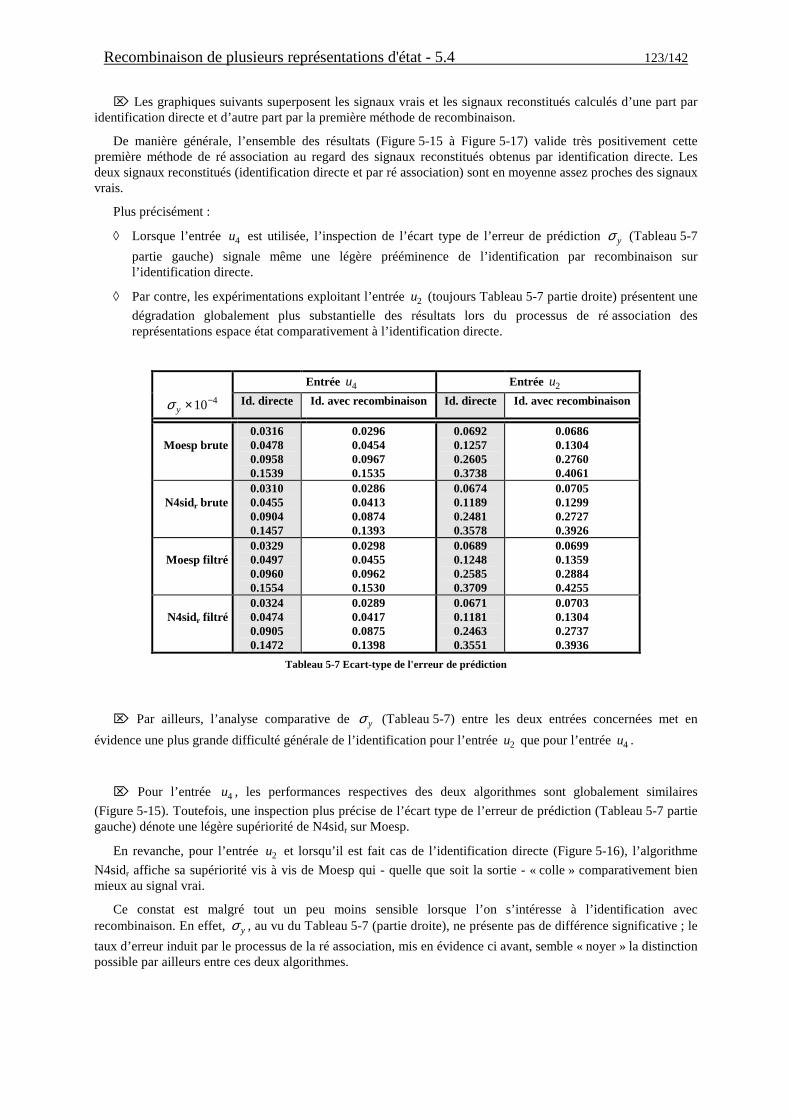
Recombinaison de plusieurs représentations d'état - 5.4 123/142
Les graphiques suivants superposent les signaux vrais et les signaux reconstitués calculés d’une part par identification directe et d’autre part par la première méthode de recombinaison.
De manière générale, l’ensemble des résultats (Figure 5-15 à Figure 5-17) valide très positivement cette première méthode de ré association au regard des signaux reconstitués obtenus par identification directe. Les deux signaux reconstitués (identification directe et par ré association) sont en moyenne assez proches des signaux vrais.
Plus précisément :
◊ Lorsque l’entrée u4 est utilisée, l’inspection de l’écart type de l’erreur de prédiction σ y (Tableau 5-7
partie gauche) signale même une légère prééminence de l’identification par recombinaison sur l’identification directe.
◊ Par contre, les expérimentations exploitant l’entrée u2 (toujours Tableau 5-7 partie droite) présentent une
dégradation globalement plus substantielle des résultats lors du processus de ré association des représentations espace état comparativement à l’identification directe.
Entrée u4 Entrée u2
σ y × −10 4 Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
Moesp brute
0.0316 0.0478 0.0958 0.1539
0.0296 0.0454 0.0967 0.1535
0.0692 0.1257 0.2605 0.3738
0.0686 0.1304 0.2760 0.4061
N4sidr brute
0.0310 0.0455 0.0904 0.1457
0.0286 0.0413 0.0874 0.1393
0.0674 0.1189 0.2481 0.3578
0.0705 0.1299 0.2727 0.3926
Moesp filtré
0.0329 0.0497 0.0960 0.1554
0.0298 0.0455 0.0962 0.1530
0.0689 0.1248 0.2585 0.3709
0.0699 0.1359 0.2884 0.4255
N4sidr filtré
0.0324 0.0474 0.0905 0.1472
0.0289 0.0417 0.0875 0.1398
0.0671 0.1181 0.2463 0.3551
0.0703 0.1304 0.2737 0.3936
Tableau 5-7 Ecart-type de l'erreur de prédiction
Par ailleurs, l’analyse comparative de σ y (Tableau 5-7) entre les deux entrées concernées met en
évidence une plus grande difficulté générale de l’identification pour l’entrée u2 que pour l’entrée u4 .
Pour l’entrée u4 , les performances respectives des deux algorithmes sont globalement similaires
(Figure 5-15). Toutefois, une inspection plus précise de l’écart type de l’erreur de prédiction (Tableau 5-7 partie gauche) dénote une légère supériorité de N4sidr sur Moesp.
En revanche, pour l’entrée u2 et lorsqu’il est fait cas de l’identification directe (Figure 5-16), l’algorithme
N4sidr affiche sa supériorité vis à vis de Moesp qui - quelle que soit la sortie - « colle » comparativement bien mieux au signal vrai.
Ce constat est malgré tout un peu moins sensible lorsque l’on s’intéresse à l’identification avec recombinaison. En effet, σ y , au vu du Tableau 5-7 (partie droite), ne présente pas de différence significative ; le
taux d’erreur induit par le processus de la ré association, mis en évidence ci avant, semble « noyer » la distinction possible par ailleurs entre ces deux algorithmes.
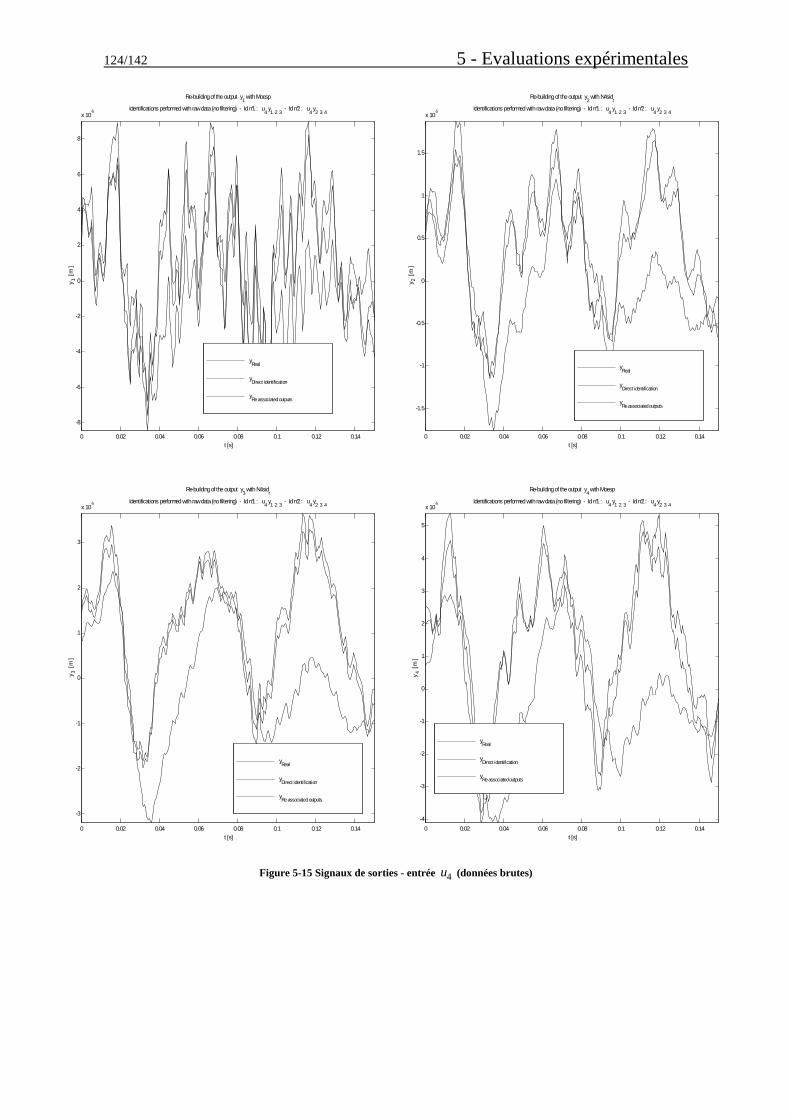
124/142 5 - Evaluations expérimentales
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-8
-6
-4
-2
0
2
4
6
8
x 10-6
Re-building of the output y1 with Moesp
Identifications performed with raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
t [s]
y1 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-1.5
-1
-0.5
0
0.5
1
1.5
x 10-5
Re-building of the output y2 with N4sid
r
Identifications performed with raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
t [s]
y2 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-3
-2
-1
0
1
2
3
x 10-5
Re-building of the output y3 with N4sid
r
Identifications performed with raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
t [s]
y3 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-4
-3
-2
-1
0
1
2
3
4
5
x 10-5
Re-building of the output y4 with Moesp
Identifications performed with raw data (no filtering) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
t [s]
y4 [
m]
yReal
yDirect identification
yRe associated outputs
Figure 5-15 Signaux de sorties - entrée u4 (données brutes)
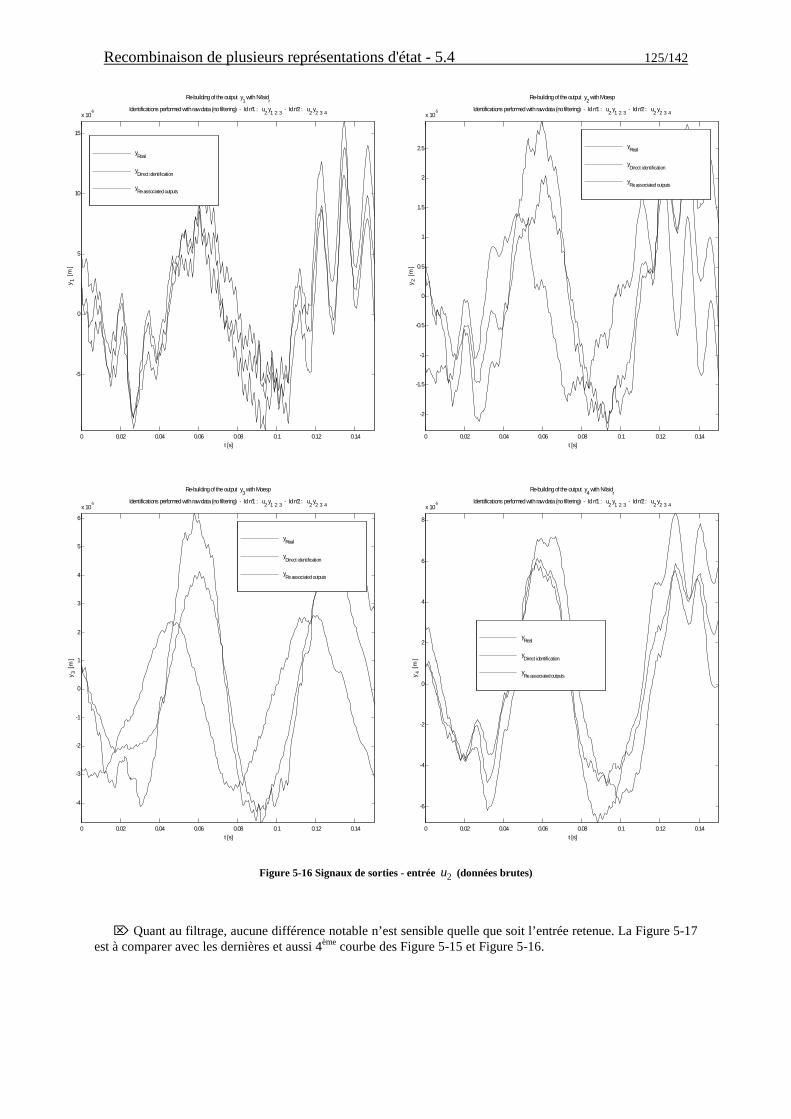
Recombinaison de plusieurs représentations d'état - 5.4 125/142
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-5
0
5
10
15
x 10-6
Re-building of the output y1 with N4sid
r
Identifications performed with raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
t [s]
y1 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
x 10-5
Re-building of the output y2 with Moesp
Identifications performed with raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
t [s]
y2 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-4
-3
-2
-1
0
1
2
3
4
5
6
x 10-5
Re-building of the output y3 with Moesp
Identifications performed with raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
t [s]
y3 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-6
-4
-2
0
2
4
6
8
x 10-5
Re-building of the output y4 with N4sid
r
Identifications performed with raw data (no filtering) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
t [s]
y4 [
m]
yReal
yDirect identification
yRe associated outputs
Figure 5-16 Signaux de sorties - entrée u2 (données brutes)
Quant au filtrage, aucune différence notable n’est sensible quelle que soit l’entrée retenue. La Figure 5-17 est à comparer avec les dernières et aussi 4ème courbe des Figure 5-15 et Figure 5-16.
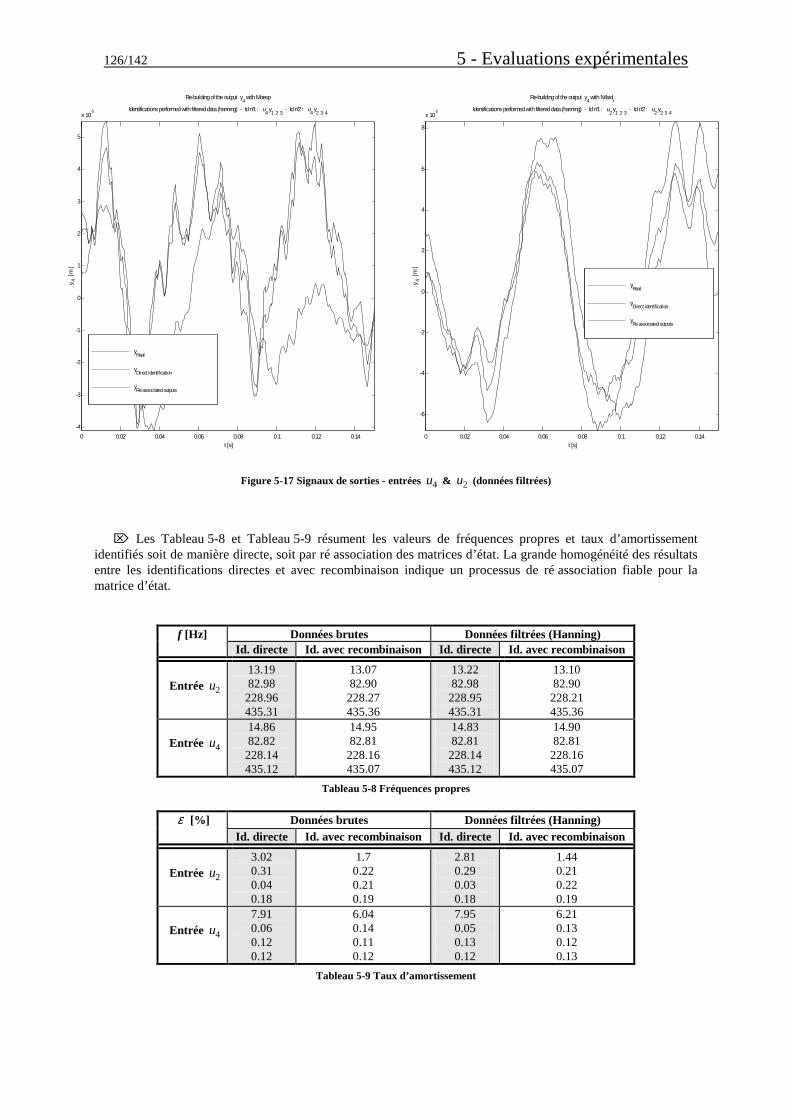
126/142 5 - Evaluations expérimentales
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-4
-3
-2
-1
0
1
2
3
4
5
x 10-5
Re-building of the output y4 with Moesp
Identifications performed with filtered data (hanning) - Id n°1 : u4 y
1 2 3 - Id n°2 : u
4 y
2 3 4
t [s]
y4 [
m]
yReal
yDirect identification
yRe associated outputs
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
-6
-4
-2
0
2
4
6
8
x 10-5
Re-building of the output y4 with N4sid
r
Identifications performed with filtered data (hanning) - Id n°1 : u2 y
1 2 3 - Id n°2 : u
2 y
2 3 4
t [s]
y4 [
m]
yReal
yDirect identification
yRe associated outputs
Figure 5-17 Signaux de sorties - entrées u4 & u2 (données filtrées)
Les Tableau 5-8 et Tableau 5-9 résument les valeurs de fréquences propres et taux d’amortissement identifiés soit de manière directe, soit par ré association des matrices d’état. La grande homogénéité des résultats entre les identifications directes et avec recombinaison indique un processus de ré association fiable pour la matrice d’état.
f [Hz] Données brutes Données filtrées (Hanning) Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
Entrée u2
13.19 82.98 228.96 435.31
13.07 82.90 228.27 435.36
13.22 82.98 228.95 435.31
13.10 82.90 228.21 435.36
Entrée u4
14.86 82.82 228.14 435.12
14.95 82.81 228.16 435.07
14.83 82.81 228.14 435.12
14.90 82.81 228.16 435.07
Tableau 5-8 Fréquences propres
ε [%] Données brutes Données filtrées (Hanning) Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
Entrée u2
3.02 0.31 0.04 0.18
1.7 0.22 0.21 0.19
2.81 0.29 0.03 0.18
1.44 0.21 0.22 0.19
Entrée u4
7.91 0.06 0.12 0.12
6.04 0.14 0.11 0.12
7.95 0.05 0.13 0.12
6.21 0.13 0.12 0.13
Tableau 5-9 Taux d’amortissement

Recombinaison de plusieurs représentations d'état - 5.4 127/142
Les Tableau 5-10 et Tableau 5-11 récapitulent les résultats de l’identification autonome des matrices élémentaires par exploitation de la matrice des entrées identifiée B (ici pas de moyenne). De manière générale, elles mettent en évidence une assez bonne corrélation entre les masses obtenues par identification directe et celles déduites de la ré association. On peut aussi remarquer le rapport d’environ 2 existant entre la masse m2 et m4 ;
rapport correspondant effectivement à la répartition des masses de la structure discrète telle qu’elle est modélisée à la Figure 5-10.
m [kg] Moesp (données brutes) N4sidr (données brutes) Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
m2 2.2572 2.0669 2.3109 2.2239
m4 0.9434 0.9932 0.8997 0.9270
Tableau 5-10 Identification autonome de m - données brutes
m [kg] Moesp (données filtrées) N4sidr (données filtrées) Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
m2 2.2314 2.0724 2.3361 2.2222
m4 0.9440 0.9880 0.8985 0.9259
Tableau 5-11 Identification autonome de m - données filtrées
Suite à l’identification des masses élémentaires, la poursuite de l’identification des matrices physiques peut s’envisager. Ainsi, les Tableau 5-12 et Tableau 5-13 sont les résultats de l’identification totalement autonome des matrices M, C et K (Seules les matrices correspondant à l’entrée u4 sont présentées).
Les deux algorithmes présentent des résultats honorables. Le filtrage de Hanning n’apporte que peu de changement.
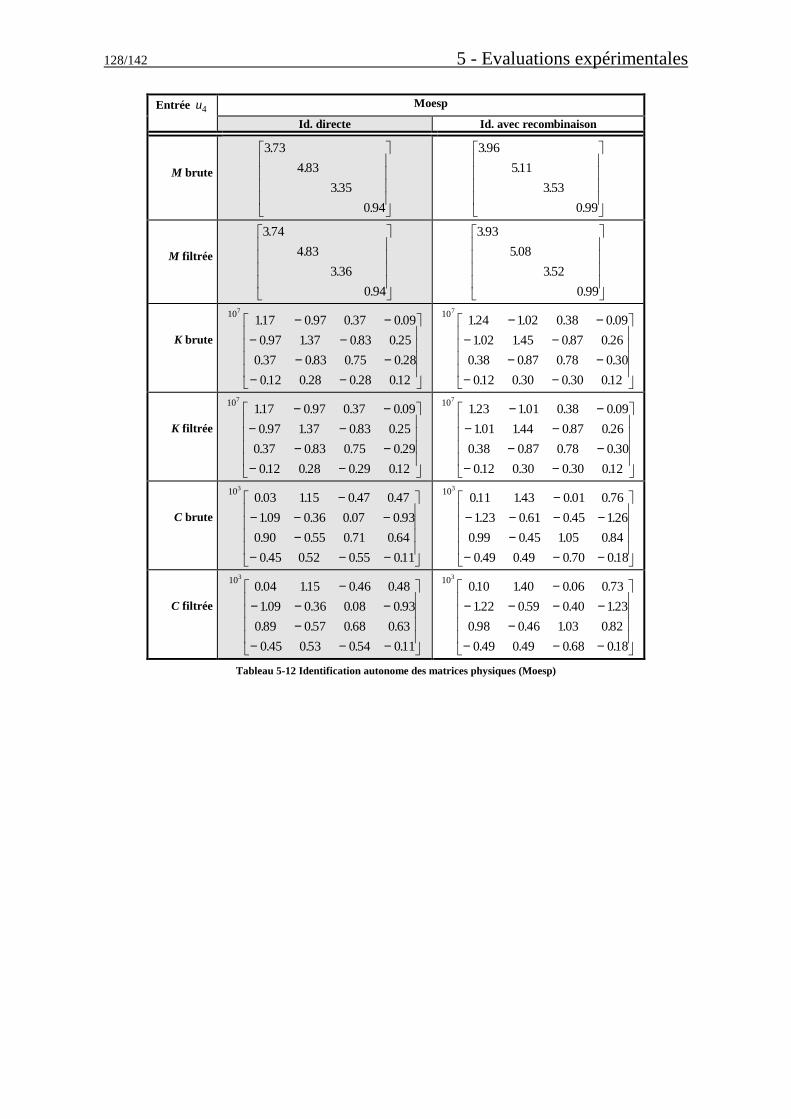
128/142 5 - Evaluations expérimentales
Entrée u4 Moesp
Id. directe Id. avec recombinaison
M brute
373
483
335
0 94
.
.
.
.
396
511
353
0 99
.
.
.
.
M filtrée
374
4 83
336
0 94
.
.
.
.
393
508
352
0 99
.
.
.
.
K brute
107
117 0 97 0 37 0 09
0 97 137 083 0 25
0 37 083 0 75 0 28
012 0 28 0 28 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
107
124 102 0 38 0 09
102 145 087 0 26
0 38 087 0 78 0 30
012 0 30 0 30 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
K filtrée
107
117 0 97 0 37 0 09
0 97 137 083 0 25
0 37 083 0 75 0 29
012 0 28 0 29 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
107
123 101 0 38 0 09
101 144 087 0 26
0 38 087 0 78 0 30
012 0 30 0 30 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
C brute
103
0 03 115 0 47 0 47
109 0 36 0 07 0 93
0 90 055 0 71 0 64
0 45 052 055 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
103
011 143 0 01 0 76
123 0 61 0 45 126
0 99 0 45 105 084
0 49 0 49 0 70 018
. . . .
. . . .
. . . .
. . . .
−− − − −
−− − −
C filtrée
103
0 04 115 0 46 0 48
109 0 36 0 08 0 93
089 057 0 68 0 63
0 45 053 054 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
103
010 140 0 06 0 73
122 059 0 40 123
0 98 0 46 103 082
0 49 0 49 0 68 018
. . . .
. . . .
. . . .
. . . .
−− − − −
−− − −
Tableau 5-12 Identification autonome des matrices physiques (Moesp)
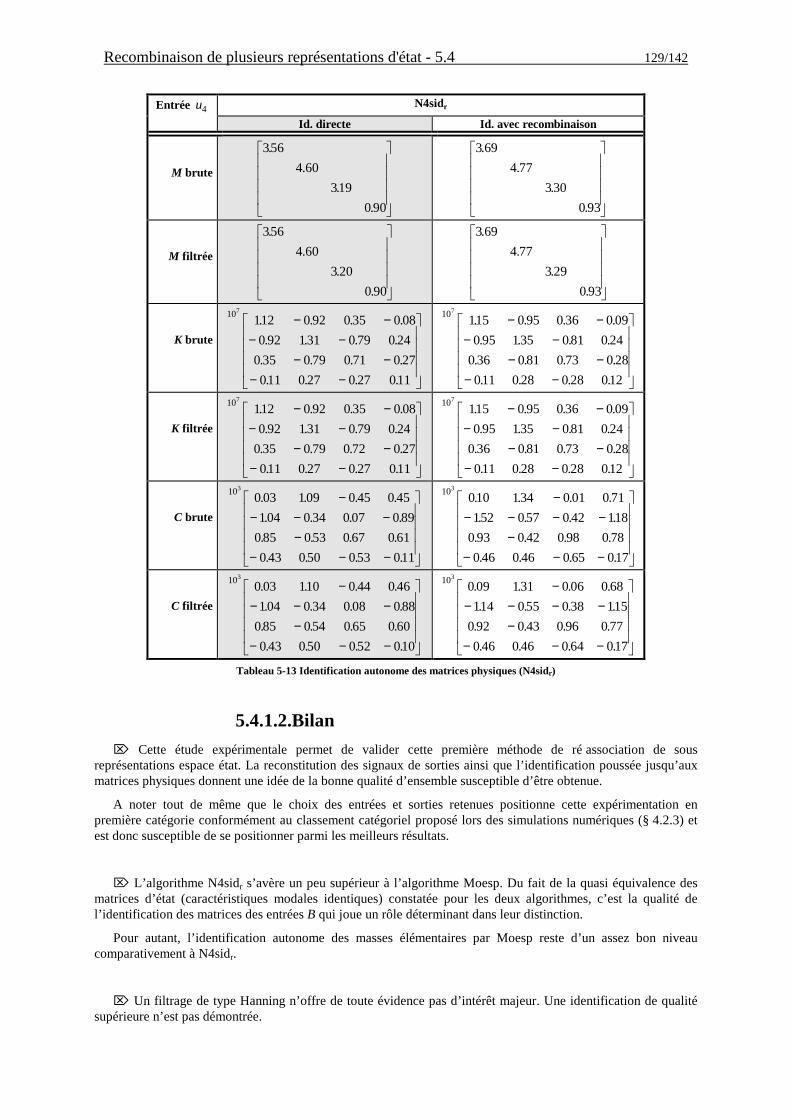
Recombinaison de plusieurs représentations d'état - 5.4 129/142
Entrée u4 N4sidr
Id. directe Id. avec recombinaison
M brute
356
4 60
319
0 90
.
.
.
.
3 69
4 77
330
0 93
.
.
.
.
M filtrée
356
4 60
3 20
0 90
.
.
.
.
3 69
4 77
3 29
0 93
.
.
.
.
K brute
107
112 0 92 0 35 0 08
0 92 131 0 79 0 24
0 35 0 79 0 71 0 27
011 0 27 0 27 011
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
107
115 0 95 0 36 0 09
0 95 135 081 0 24
0 36 081 0 73 0 28
011 0 28 0 28 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
K filtrée
107
112 0 92 0 35 0 08
0 92 131 0 79 0 24
0 35 0 79 0 72 0 27
011 0 27 0 27 011
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
107
115 0 95 0 36 0 09
0 95 135 081 0 24
0 36 081 0 73 0 28
011 0 28 0 28 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
C brute
103
0 03 109 0 45 0 45
104 0 34 0 07 089
085 053 0 67 0 61
0 43 050 053 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
103
010 134 0 01 0 71
152 057 0 42 118
0 93 0 42 0 98 0 78
0 46 0 46 0 65 017
. . . .
. . . .
. . . .
. . . .
−− − − −
−− − −
C filtrée
103
0 03 110 0 44 0 46
104 0 34 0 08 088
085 054 0 65 0 60
0 43 050 052 010
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
103
0 09 131 0 06 0 68
114 055 0 38 115
0 92 0 43 0 96 0 77
0 46 0 46 0 64 017
. . . .
. . . .
. . . .
. . . .
−− − − −
−− − −
Tableau 5-13 Identification autonome des matrices physiques (N4sidr)
5.4.1.2.Bilan
Cette étude expérimentale permet de valider cette première méthode de ré association de sous représentations espace état. La reconstitution des signaux de sorties ainsi que l’identification poussée jusqu’aux matrices physiques donnent une idée de la bonne qualité d’ensemble susceptible d’être obtenue.
A noter tout de même que le choix des entrées et sorties retenues positionne cette expérimentation en première catégorie conformément au classement catégoriel proposé lors des simulations numériques (§ 4.2.3) et est donc susceptible de se positionner parmi les meilleurs résultats.
L’algorithme N4sidr s’avère un peu supérieur à l’algorithme Moesp. Du fait de la quasi équivalence des matrices d’état (caractéristiques modales identiques) constatée pour les deux algorithmes, c’est la qualité de l’identification des matrices des entrées B qui joue un rôle déterminant dans leur distinction.
Pour autant, l’identification autonome des masses élémentaires par Moesp reste d’un assez bon niveau comparativement à N4sidr.
Un filtrage de type Hanning n’offre de toute évidence pas d’intérêt majeur. Une identification de qualité supérieure n’est pas démontrée.

130/142 5 - Evaluations expérimentales
5.4.2.Méthode n°3 : usage de la base à interprétation physique avec exploitation de tout ou partie de M
Au cours de cette phase expérimentale, seule l’entrée u4 a été retenue avec :
◊ pour la première identification partielle, les sorties y1 , y2 et y3 .
◊ pour la deuxième identification partielle, les sorties y2 , y3 et y4 .
Pour chaque identification partielle, seulement 3 modes ont été retenus pour correspondre au nombre de sorties ; condition autorisant la projection dans l’espace à interprétation physique.
Par ailleurs, une identification directe (les quatre sorties simultanées !) est entreprise d’une part pour permettre les comparaisons mais aussi pour déterminer la matrice de masse du système (par identification autonome).
Par la suite, cette dernière est utilisée pour calculer la matrice des entrées B globale, exploitée dans l’identification finale obtenue par recombinaison étant donné que l’identification de B par cette troisième méthode n’est pas possible directement.
5.4.2.1.Analyse des résultats
Un premier constat : d’une expérimentation à l’autre (avec des conditions identiques), des écarts très importants sont constatés.
En outre, une des difficultés réside dans le choix des modes (dans la mesure où les 4 sont ici tous disponibles) avec des résultats assez divers à la clé. Par exemple, les Tableau 5-14 et Tableau 5-15 précisent les fréquences propres et taux d’amortissement constatés pour deux séries différentes de modes sélectionnés.
Ainsi, la sélection des modes 1, 2 et 4 pour la première identification et 1, 2 et 3 pour la deuxième semble donner des résultats assez proches de l’identification de référence pour les trois premiers modes alors que la recombinaison prenant en compte la sélection des modes 1, 3 et 4 pour la deuxième identification partielle s’avère meilleure pour le quatrième mode.
f [Hz] Données brutes Données filtrées (Hanning) Modes Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
Id.1 : 1 2 4
Id.2 : 1 3 4
14.86 82.82 228.14 435.12
16.18 77.69 229.01 435.10
14.83 82.81 228.14 435.12
16.28 77.51 227.99 435.09
Id.1 : 1 2 4
Id.2 : 1 2 3
14.86 82.82 228.14 435.12
14.91 82.82 228.20 430.72
14.83 82.81 228.14 435.12
14.91 82.82 227.96 429.87
Tableau 5-14 Fréquences propres - entrée u4
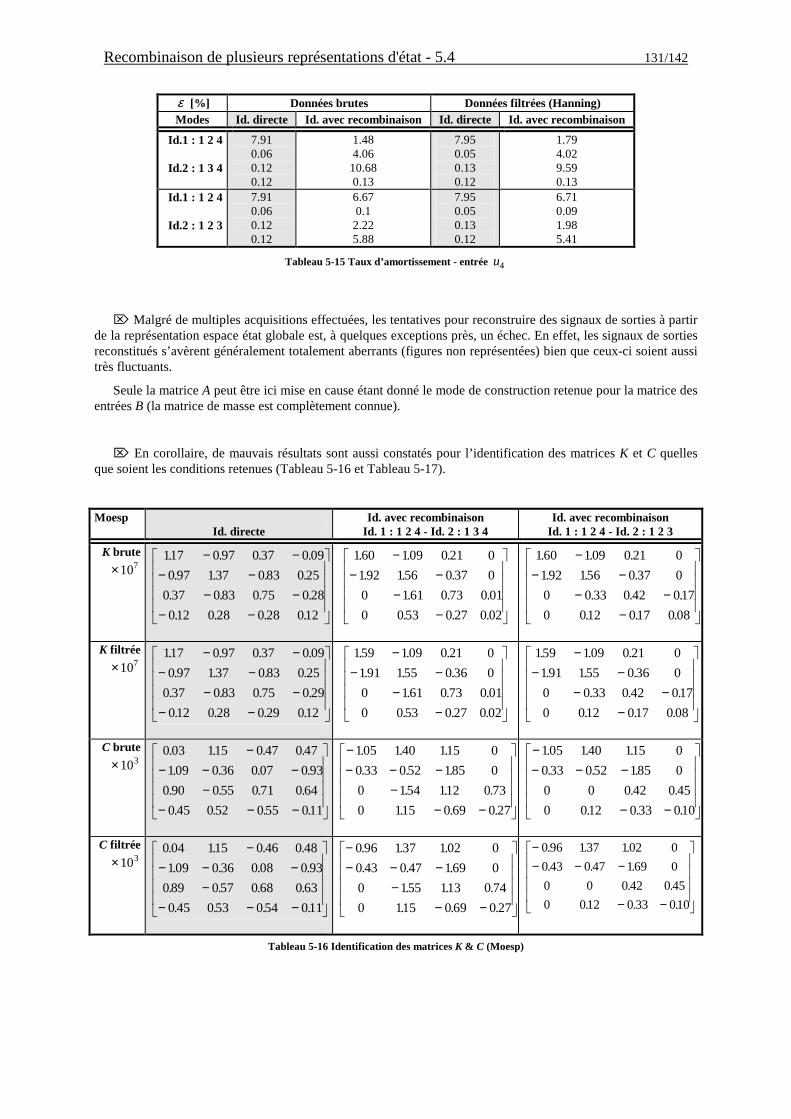
Recombinaison de plusieurs représentations d'état - 5.4 131/142
ε [%] Données brutes Données filtrées (Hanning) Modes Id. directe Id. avec recombinaison Id. directe Id. avec recombinaison
Id.1 : 1 2 4
Id.2 : 1 3 4
7.91 0.06 0.12 0.12
1.48 4.06 10.68 0.13
7.95 0.05 0.13 0.12
1.79 4.02 9.59 0.13
Id.1 : 1 2 4
Id.2 : 1 2 3
7.91 0.06 0.12 0.12
6.67 0.1 2.22 5.88
7.95 0.05 0.13 0.12
6.71 0.09 1.98 5.41
Tableau 5-15 Taux d’amortissement - entrée u4
Malgré de multiples acquisitions effectuées, les tentatives pour reconstruire des signaux de sorties à partir de la représentation espace état globale est, à quelques exceptions près, un échec. En effet, les signaux de sorties reconstitués s’avèrent généralement totalement aberrants (figures non représentées) bien que ceux-ci soient aussi très fluctuants.
Seule la matrice A peut être ici mise en cause étant donné le mode de construction retenue pour la matrice des entrées B (la matrice de masse est complètement connue).
En corollaire, de mauvais résultats sont aussi constatés pour l’identification des matrices K et C quelles que soient les conditions retenues (Tableau 5-16 et Tableau 5-17).
Moesp Id. directe
Id. avec recombinaison Id. 1 : 1 2 4 - Id. 2 : 1 3 4
Id. avec recombinaison Id. 1 : 1 2 4 - Id. 2 : 1 2 3
K brute
× 107 117 0 97 0 37 0 09
0 97 137 083 0 25
0 37 083 0 75 0 28
012 0 28 0 28 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
160 109 0 21 0
192 156 0 37 0
0 161 0 73 0 01
0 053 0 27 0 02
. . .
. . .
. . .
. . .
−− −
−−
160 109 0 21 0
192 156 0 37 0
0 0 33 0 42 017
0 012 017 0 08
. . .
. . .
. . .
. . .
−− −
− −−
K filtrée
× 107 117 0 97 0 37 0 09
0 97 137 083 0 25
0 37 083 0 75 0 29
012 0 28 0 29 012
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
159 109 0 21 0
191 155 0 36 0
0 161 0 73 0 01
0 053 0 27 0 02
. . .
. . .
. . .
. . .
−− −
−−
159 109 0 21 0
191 155 0 36 0
0 0 33 0 42 017
0 012 017 0 08
. . .
. . .
. . .
. . .
−− −
− −−
C brute
× 103 0 03 115 0 47 0 47
109 0 36 0 07 0 93
0 90 055 0 71 0 64
0 45 052 055 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
−− − −
−− −
105 140 115 0
0 33 052 185 0
0 154 112 0 73
0 115 0 69 0 27
. . .
. . .
. . .
. . .
−− − −
− −
105 140 115 0
0 33 052 185 0
0 0 0 42 0 45
0 012 0 33 010
. . .
. . .
. .
. . .
C filtrée
× 103 0 04 115 0 46 0 48
109 0 36 0 08 0 93
089 057 0 68 0 63
0 45 053 054 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
−− − −
−− −
0 96 137 102 0
0 43 0 47 169 0
0 155 113 0 74
0 115 0 69 0 27
. . .
. . .
. . .
. . .
−− − −
− −
0 96 137 102 0
0 43 0 47 169 0
0 0 0 42 0 45
0 012 0 33 010
. . .
. . .
. .
. . .
Tableau 5-16 Identification des matrices K & C (Moesp)
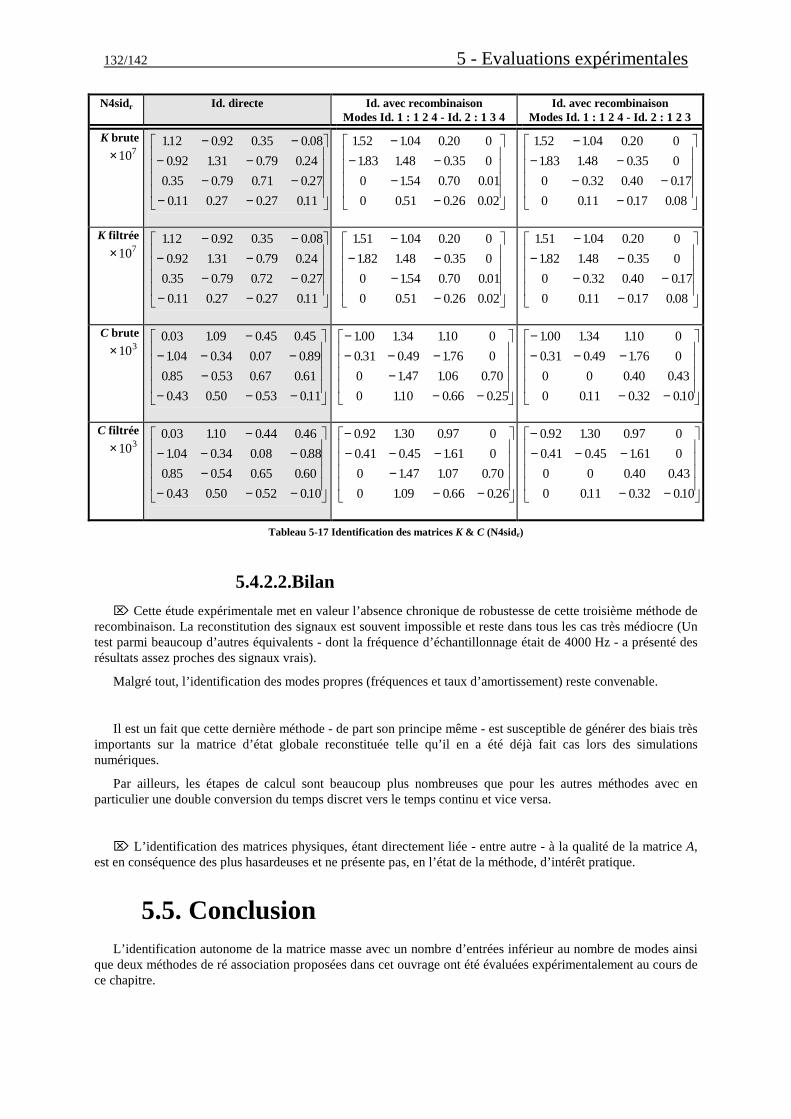
132/142 5 - Evaluations expérimentales
N4sidr Id. directe Id. avec recombinaison Modes Id. 1 : 1 2 4 - Id. 2 : 1 3 4
Id. avec recombinaison Modes Id. 1 : 1 2 4 - Id. 2 : 1 2 3
K brute
× 107 112 0 92 0 35 0 08
0 92 131 0 79 0 24
0 35 0 79 0 71 0 27
011 0 27 0 27 011
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
152 104 0 20 0
183 148 0 35 0
0 154 0 70 0 01
0 051 0 26 0 02
. . .
. . .
. . .
. . .
−− −
−−
152 104 0 20 0
183 148 0 35 0
0 0 32 0 40 017
0 011 017 0 08
. . .
. . .
. . .
. . .
−− −
− −−
K filtrée
× 107 112 0 92 0 35 0 08
0 92 131 0 79 0 24
0 35 0 79 0 72 0 27
011 0 27 0 27 011
. . . .
. . . .
. . . .
. . . .
− −− −
− −− −
151 104 0 20 0
182 148 0 35 0
0 154 0 70 0 01
0 051 0 26 0 02
. . .
. . .
. . .
. . .
−− −
−−
151 104 0 20 0
182 148 0 35 0
0 0 32 0 40 017
0 011 017 0 08
. . .
. . .
. . .
. . .
−− −
− −−
C brute
× 103 0 03 109 0 45 0 45
104 0 34 0 07 089
085 053 0 67 0 61
0 43 050 053 011
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
−− − −
−− −
100 134 110 0
0 31 0 49 176 0
0 147 106 0 70
0 110 0 66 0 25
. . .
. . .
. . .
. . .
−− − −
− −
100 134 110 0
0 31 0 49 176 0
0 0 0 40 0 43
0 011 0 32 010
. . .
. . .
. .
. . .
C filtrée
× 103 0 03 110 0 44 0 46
104 0 34 0 08 088
085 054 0 65 0 60
0 43 050 052 010
. . . .
. . . .
. . . .
. . . .
−− − −
−− − −
−− − −
−− −
0 92 130 0 97 0
0 41 0 45 161 0
0 147 107 0 70
0 109 0 66 0 26
. . .
. . .
. . .
. . .
−− − −
− −
0 92 130 0 97 0
0 41 0 45 161 0
0 0 0 40 0 43
0 011 0 32 010
. . .
. . .
. .
. . .
Tableau 5-17 Identification des matrices K & C (N4sidr)
5.4.2.2.Bilan
Cette étude expérimentale met en valeur l’absence chronique de robustesse de cette troisième méthode de recombinaison. La reconstitution des signaux est souvent impossible et reste dans tous les cas très médiocre (Un test parmi beaucoup d’autres équivalents - dont la fréquence d’échantillonnage était de 4000 Hz - a présenté des résultats assez proches des signaux vrais).
Malgré tout, l’identification des modes propres (fréquences et taux d’amortissement) reste convenable.
Il est un fait que cette dernière méthode - de part son principe même - est susceptible de générer des biais très importants sur la matrice d’état globale reconstituée telle qu’il en a été déjà fait cas lors des simulations numériques.
Par ailleurs, les étapes de calcul sont beaucoup plus nombreuses que pour les autres méthodes avec en particulier une double conversion du temps discret vers le temps continu et vice versa.
L’identification des matrices physiques, étant directement liée - entre autre - à la qualité de la matrice A, est en conséquence des plus hasardeuses et ne présente pas, en l’état de la méthode, d’intérêt pratique.
5.5. Conclusion L’identification autonome de la matrice masse avec un nombre d’entrées inférieur au nombre de modes ainsi
que deux méthodes de ré association proposées dans cet ouvrage ont été évaluées expérimentalement au cours de ce chapitre.
Conclusion - 5.5 133/142
De manière générale, et conformément au constat fait au cours des simulations numériques précédentes, la complexité induite par le processus de ré association de la première méthode est fort convenablement supportée.
En revanche, l’exploitation de la troisième méthode pose nettement plus de problèmes et échoue globalement en l’état actuel des expérimentations.
En outre et paradoxalement aux analyses numériques entreprises dans le chapitre précédent, les études expérimentales mettent nettement en valeur la supériorité des identifications de l'algorithme N4sidr par rapport à Moesp.
En fait, ce constat est confirmé par un certain nombre d’expériences antérieures [ 48] notifiant justement des estimations très médiocres des matrices B et D avec Moesp dans le cas d’environnement industriel et d’entrées colorées. Ceci appuie aussi singulièrement la faible robustesse de l’algorithme original Moesp soumis à un environnement industriel et/ou des entrées colorées.
Depuis, fort de ce constat, des améliorations pour rendre l’algorithme Moesp plus "robuste" ont été proposées notamment pour la phase d’identification des matrices B et D [ 1].
Lorsque l’étude a été réalisée, l’identification de la matrice masse M et en général des matrices physiques sont d’un bon niveau surtout pour l’algorithme N4sidr disposant d’une identification robuste de la matrice B. Les biais constatés étant probablement induits par la faible masse de la structure au regard de celle du pot vibrant.
L’étude comparative menée entre les signaux bruts et les signaux filtrés par un filtre de type Hanning ne porte à aucune conclusion. Il s’avère que ce type de filtrage n’est d’aucune influence dans un sens positif comme négatif.


135/142
6. Conclusion générale et perspectives
A été abordé au cours de ce travail la problématique de l’identification dans l’espace état des matrices physiques (matrices masse M, raideur K et amortissement C).
L’obtention de ces dernières est possible seulement si la représentation d’état du système dans l’espace à interprétation physique est disponible. Or, pour parvenir à cette représentation d’état similaire bien particulière, la condition sine qua non est d’avoir identifié un modèle espace état disposant d’autant de modes que de sorties (l=n). Outre les problèmes spécifiques liés à la détermination de l’ordre, le raffinement ou la réduction éventuelle du modèle brut, il est relativement peu réaliste d’avoir à disposition - dans un cadre d’identification de structures de génie civil - le nombre adéquat de sorties utiles. Il est hautement plus probable de n’en disposer que d’une partie seulement. Et parmi celles-ci, certaines peuvent n’avoir aucune efficience (si elles sont positionnées à un nœud par exemple).
C’est pourquoi, il est apparu opportun de s’intéresser aux diverses possibilités de recombinaisons de sous représentations issues de campagnes de mesures successives d’une même structure ; ceci afin de reconstituer, à partir de données fragmentaires, un modèle espace état plus complet (en nombre de sorties particulièrement).
C’est ainsi que trois méthodes de ré association - d’intérêt variable mais complémentaires - ont été proposées puis évaluées numériquement et enfin expérimentalement. Au cours de cette étude et conformément à la problématique originelle, les calculs d’identification ont été « poussés » jusqu'à l’obtention des caractéristiques physiques afin d’apprécier au final les dégradations et les attraits de telles méthodes sur les matrices physiques.
Par ailleurs, et toujours dans le but de répondre aux aspects pratiques d’analyses dynamiques en vraie grandeur, une extension a été apportée au processus de reconstitution des matrices physiques tel qu’il est décrit dans la littérature. En effet, originellement celui-ci ne permet l’identification des caractéristiques physiques que lorsque le nombre d’entrées est égal au nombre de sorties (et donc au nombre de modes) ou, dans le cas contraire (nombre d’entrées inférieur au nombre de sorties), lorsque au moins un terme élémentaire de la matrice masse est connu.
Il est désormais possible de reconstituer totalement - grâce à Bc - les matrices physiques avec un nombre
d’entrées réduit (dans la pratique, un seul excitateur est souvent utilisé) et en l’absence d’une quelconque connaissance préalable de M. Une évaluation numérique et expérimentale a permis de valider le procédé.
Numériquement et expérimentalement, la réalisation première du modèle espace état à partir des données entrées et sorties a été confiée à deux algorithmes sous-espace dans l’espace état : les algorithmes Moesp et N4sidr.
Vu la difficulté du problème à traiter, ces algorithmes ont été retenus du fait de leurs performances très nettement au dessus des méthodes de type réalisation de systèmes (ERA).
� Les simulations numériques ont permis de valider globalement les principes retenus pour :
◊ d’une part l’identification totalement autonome des masses élémentaires mi à partir de Bc lorsque le
nombre d’entrées est réduit et qu’aucune information sur les masses n’est préalablement disponible.
136/142 6 - Conclusion générale et perspectives
◊ d’autre part l’élaboration des trois méthodes de ré association tout en mettant en valeur, malgré tout, la moindre qualité des identifications finales lorsque le processus projette au préalable dans la base physique (2ème et 3ème méthode).
Concernant les méthodes de ré association, les difficultés relevées ont vraisemblablement porté sur la recombinaison biaisée de la matrice des entrées B (2ème méthode) et de la matrice A lorsque le nombre de sorties est inférieur au nombre de modes (3ème méthode).
Il reste qu’une fois obtenue une représentation d’état suffisamment étendue - même médiocre - grâce à l’une des méthodes de recombinaison, l’identification « poussée » jusqu'à l’obtention des matrices physiques reste, dans tous les cas, très valable en particulier si une moyenne sur une série de tests est réalisée.
� Les mesures expérimentales ont été réalisées sur une structure continue de type poutre cantilever à défaut de disposer d’une structure par nature plus discrète (masses plus concentrées).
Les performances et faiblesses des différentes méthodes constatées lors des analyses numériques se sont retrouvées lors de la phase expérimentale à l’exception toutefois du classement comparatif des deux algorithmes. En effet, la version originale de Moesp, affichant pourtant une qualité supérieure en numérique, a accusé un net manque de robustesse dans l’identification de la matrice B lors des tests réels.
◊ Au cours de cette phase expérimentale, l’identification autonome des masses élémentaires a pu être menée à bien, malgré probablement une interaction pot vibrant - structure assez importante qui a généré quelques biais dans les valeurs des masses identifiées.
◊ La première méthode de ré association (projection dans une base commune quelconque) a été validée expérimentalement avec succès. En revanche, la troisième méthode, malgré des résultats assez convenables quant aux caractéristiques modales - fréquences et taux d’amortissement - s’est avérée trop instable pour construire un modèle espace état apte à reconstituer, d’une part des signaux de sorties comparables aux signaux réels, d’autre part des matrices physiques avec un taux d’erreur valable.
� Malgré tout, l’ensemble des résultats obtenus restent extrêmement encourageants pour envisager à court terme des applications réelles sur des structures réticulées à base de barres et de câbles.
Perspectives :
� Il paraît opportun à ce stade de l’étude et afin de progresser dans la connaissance et les potentiels de l’identification des matrices physiques en association avec les méthodes de ré association proposées, d’envisager une campagne expérimentale sur un système plus adapté et mieux maîtrisé du point de vue expérimental. En particulier, un modèle fortement « discret » s’avérerai des plus adéquat tel que par exemple un système élémentaire du type « masse - ressort - amortissement » ou encore une structure réticulée à masses localisées relativement importantes.
En particulier, cette étude expérimentale, associée à de nouvelles simulations numériques, peut permettre d’accroître la connaissance pratique et numérique des principes de projection et de ré association dans la base physique employés dans les deuxième et troisième méthodes. Ainsi à terme, il est possible d’espérer des améliorations substantielles, entre autre sur le plan numérique, donnant plus d’intérêt au final à la dernière méthode.
� Un autre point à considérer reste l’étude plus systématique des divers paramètres entrant en ligne de compte dans la mise en œuvre des algorithmes sous-espace, en particulier : nombre de blocs en ligne et en

137/142
colonne, nombre de mesures, fréquence d’échantillonnage. Cette dernière peut permettre, tout à la fois, d’améliorer les résultats expérimentaux et de limiter l’excès de calculs numériques46 par optimisation des tailles des matrices.
� Enfin, des travaux ultérieurs de recherche peuvent s’intéresser à l’identification des matrices physiques en association - ou non - avec les méthodes de recombinaison par l’utilisation des algorithmes identifiant seulement la part stochastique des systèmes linéaires et invariants [ 41] [ 43]. Ces algorithmes ont la particularité de ne pas exploiter de mesures d’entrées et profitent seulement de l’excitation issue de l’environnement (vent, trafic d’objets de véhicules, tremblement de terre, vagues, etc.).
46 …susceptible de désavantager à terme les méthodes numériques sous-jacentes.

139/142
7. Références bibliographiques
[ 1] M. Abdelghani, “Identification Temporelle des Structures : Approche des Algorithmes Sous-Espace dans l'Espace Etat”, Thèse [95MON2185], Université Montpellier II, 5 December 1995.
[ 2] M. Abdelghani and F. Le Rohellec, “Modal Analysis and Identification of Time Varying Structures” Proceedings of New Advances in Modal Synthesis of Large Structures, Non-Linear, Damped and Non-Deterministic Cases, Lyon, October 1995.
[ 3] M. Abdelghani and M. Verhaegen, “Performance of Subspace Identification Methods Applied to Flexible Structures” Submitted to Journal of Sound and Vibration, 1995.
[ 4] P. Avitabile and D. Haselton, “A New Procedure for Selecting Modal Testing Reference Locations”, Sound and Vibration, April 1997, 24-29.
[ 5] F. S. V. Bazán and C. A. Bavastri, “An optimised Pseudo-Inverse Algorithm (OPIA) for Multi-Input Multi-Ouptut Modal Parameter Identification”, Mechanical Systems and Signal Processing, Vol. 10, N° 4, 1996, 365-380.
[ 6] W. Bin-Bing, “Tensegrity Structures as ‘Ring Beams’”, Journal of the International Association for Shell and Spatial Structures, Vol. 37, N° 120, 1996, 31-38.
[ 7] P. Borne, G. Dauphin-Tanguy, J.P. Richard, F. Rotella et I. Zambettakis, “Modélisation et Identification des Processus - tome 1”, Méthodes et pratiques de l’ingénieur, Editions Technip, 1992.
[ 8] Y. M. Cho, G. Xu and T. Kailath, “Fast Identification of State Space Models via Exploitation of Displacement Structure”, IEEE Transactions on Automatic Control, Vol. 39, N° 10, 1994.
[ 9] Y. M. Cho, G. Xu and T. Kailath, “Fast Recursive Identification of State Space Models via Exploitation of Displacement Structure”, Automatica, Special issue on Statistical Signal Processing and Control, Vol. 30, N° 1, 1994, 45-59.
[ 10] A. K. Chopra, “Modal Analysis of Linear Dynamic Systems : Physical Interpretation”, Journal of Structural Engineering, May 1996, 517-527.
[ 11] J. E. Cooper, “Identification of Time Varying Modal Parameters”, Aeronautical Journal, October 1990, 271-278.
[ 12] W. M. G. Courage, P. J. G. Schreurs and J. D. Janssen, “Estimation of Mechanical Parameter Values of Composites with the Use of Finite Element and System Identification Techniques”, Computers & Structures, Vol. 34, N° 2, 1990, 231-237.
[ 13] M. Donley, W. Stokes, G. S. Jeong, J. K. Suh and S. G. Jung, “Validation of Finite Elements Models for Noise/Vibration/Harshness Simulation”, Sound and Vibration, August 1996, 18-23.
[ 14] F. Escrig, J. P. Valcárcel and J. Sanchez, “Deployable Cover on a Swimming Pool in Seville”, Journal of the International Association for Shell and Spatial Structures : I.A.S.S., Vol. 37, N° 120, 1996, 39-70.
[ 15] D.J. Ewins, “Modal Testing : Theory and Practice”, John Wiley & Sons, Inc., 1984.
[ 16] A. M. Freed and C. C. Flanigan, “A Comparison of Test-Analysis-Model Reduction Methods”, Proceedings of the 8th International Model Analysis Conference, Kissimmee, Florida, February 1990, 1344-1351.
[ 17] G.M.L. Gladwell, “Inverse Vibration Problems for Finite-Element Models”, Inverse Problems, Vol. 13, N° 2, April 1997, 311-322.
[ 18] P. Hajela and F. J. Soeiro, “Recent Developments in Damage Detection based on System Identification Methods”, Structural Optimization, Vol. 2, 1990, 1-10.

140/142 7 - Références bibliographiques
[ 19] P. Hajela and F. J. Soeiro, “Structural Damage Detection on Static and Modal Analysis”, American Institute of Aeronautics and Astronautics, Vol. 28, N° 6, 1989, 1110-1115.
[ 20] J-N. Juang and R. S. Pappa, “An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction”, Journal of Guidance, Vol. 8, N° 5, September-October 1985, 620-627.
[ 21] T. Kailath, “Linear Systems”, Prentice Hall, Information and System Sciences Series, 1980.
[ 22] R. E. Kalman, “A New Approach to Linear Filtering and Prediction Problems”, Journal of Basic Engineering, Transaction of the ASME, Mars 1960, 35-45.
[ 23] Y. Kato, Y. Okada, T. Honma, M. Nakayama and K. Yamamoto, “Field Testing on the Structural Characteristics of Suspension Timber Roof”, Proceeding of the International IASS Symposium, Cophenhagen, Denmark, September 2-6 1991, 61-68.
[ 24] K. I. Kawaguchi, S. Pellegrino, H. Furuya and Y. Hangai, “Shape and Stress Control Analysis of Prestressed Truss Structures”, Session IV, 184-193.
[ 25] P. Lascaux et R. Théodor, “Analyse Numérique Matricielle Appliquée à l’Art de l’Ingénieur”, Masson, 1987.
[ 26] F. Le Rohellec, “Analyse Modale des Structures aux Paramètres Variant dans le Temps”, Rapport de DEA, Université Montpellier II (LMGC) 30 Juin 1995.
[ 27] F. Le Rohellec, “Modal Analysis and Identification of large and Time Varying Structures”, Proceedings of Engineering Systems Design & Analysis (ESDA) Conference, Montpellier, Juillet 1996.
[ 28] J-S. Lew, J-N. Juang and R.W. Longman, “Comparison of Several System Identification Methods for Flexible Structures”, Journal of Sound and Vibration, Vol. 167, N° 3, 1993, 461-480.
[ 29] L. Ljung, “System Identification, Theory for the User”, Prentice Hall, Information and System Sciences Series, 1987.
[ 30] R. L. Longman and J-N. Juang, “Recursive form of the Eigensystem Realization Algorithm for System Identification”, Journal of Guidance, Control and Dynamics, Vol. 8, September-October 1985, 620-627.
[ 31] R. B. Malla and R. L. Serrette, “Double-Layer Grids : Review of Static and Thermal Analysis Methods”, Journal of Structural Engineering, Vol. 122, N° 8, Août 1996, 873-881.
[ 32] R. B. Malla and R. L. Serrette, “Double-Layer Grids : Review of Dynamic Analysis Methods and Special Topics”, Journal of Structural Engineering, Vol. 122, N° 8, Août 1996, 882-892.
[ 33] R. B. Malla, B. Wang and B. B. Nalluri, “Dynamic Member Failure in Trusses by Pseudo-Force Method”, International Journal of Space Structures, Vol. 10, N° 2, 1995, 99-112.
[ 34] Matlab, “Matlab - Reference Guide”, The Mathworks Inc, 1992.
[ 35] T. Mckelvey, “Model Validation by geometric Arguments”, Proceedings of the 3rd European Control Conference, Rome Italy, September 1995, 1324-1329.
[ 36] M. Moonen, B. de Moor, L. Vandenberghe and J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, Int. J. Control, Vol. 49, N° 1, 1989, 219-232.
[ 37] R. Motro, “Formes et Forces dans les Systèmes Constructifs, Cas des Systèmes Réticulés Spatiaux Autocontraints”, Tome I et II, Thèse, Université Montpellier II, 2 Juin 1983.
[ 38] H. G. Natke, “Substructuring within Model Verification and Validation”, Proceedings of New Advances in Modal Synthesis of Large Structures, Non-Linear, Damped and Non-Deterministic Cases, Lyon, October 1995.
[ 39] P. Van Overschee, “Subspace Identification, Theory - Implementation - Application”, Thèse [UDC : 519.71], Katholieke Universiteit Leuven, February 1995.
[ 40] P. Van Overschee and B. De Moor, “N4SID : Subspace Algorithms for the Identification of Combined Deterministic-Stochastic Systems”,Automatica, Vol. 30, N° 1, 1994, 75-93.
[ 41] P. Van Overschee and B. De Moor, “N4SID : Subspace Algorithms for the Stochastic Identification Problem”,30th IEEE Conference on Decision and Control, Brighton, UK, 1991, 1321-1326.
141/142
[ 42] P. Van Overschee and B. De Moor, “A Unifying Theorem for Three Subspace System Identification Algorithms”, Proceedings of Sysid ’94, Vol. 2, July 4-6, Copenhagen, Denmark, 1994, 145-150.
[ 43] B. Peeters, G. De Roeck, T. Pollet, L. Shueremans, “Stochastic Subspace Techniques Applied to Parameters Identification of Civil Engineering Structures”, Proceedings of New Advances in Modal Synthesis of Large Structures, Non-Linear, Damped and Non-Deterministic Cases, Lyon, October 1995.
[ 44] M. H. Richardson, “Is It a Mode Shape, or an Operating Deflection Shape ?”, Sound and Vibration, January 1997, 54-61.
[ 45] M. Verhaegen, “Application of a Subspace Model Identification Technique to Identify LTI Systems Operating in Closed-Loop ”,Automatica, Vol. 29, N° 4, 1993, 1027-1040.
[ 46] M. Verhaegen, “Identification of the Deterministic Part of MIMO State Space Models Given in Innovations Form from Input-Output Data”,Automatica, Vol. 30, N° 1, 1994, 61-74.
[ 47] M. Verhaegen, P. Dewilde, “Subspace Model Identification. Part I : the Output-Error State Space Model Identification Class of Algorithms”, International Journal of Control, Vol. 56, N° 5, 1992, 1187-1210.
[ 48] M. Verhaegen and A. Varga, “Some Experience with the Moesp Class of Subspace Model Identification Methods in Identifying the bo105 Helicopter”, Technical Report TR R165-94, DLR Oberpfaffenhofen, 1994.
[ 49] W.M. Wonham, “On Pole Assignment in Multi-Input Controllable Linear Systems”, IEEE Trans. Autom. Control, Vol. 12, N° 6, 1968, 660-665.
[ 50] C.-D. Yang and F.-B. Yeh, “Identification, Reduction and Refinement of Model Parameters by the Eigensystem Realization Algorithm”, Journal of Guidance, Vol. 13, N° 6, November-December 1990, 1051-1059.
Nom : LE ROHELLEC Prénom : François
IDENTIFICATION DES MATRICES PHYSIQUES DANS L’ESPACE ETAT RECOMBINAISON DE SOUS-REPRESENTATIONS
Thèse présentée à l’Université de Montpellier II Sciences et Techniques du Languedoc
pour obtenir le diplôme de doctorat dans la spécialité « Mécanique, Génie Mécanique, Génie Civil »
Résumé
L’identification dynamique des matrices physiques peut s’avérer d’un grand intérêt dans le domaine du suivi de contrôle particulièrement pour certaines structures à la base déjà fortement réticulées et à masses concentrées. Mais les contraintes théoriques imposées par ces procédures sont souvent peu réalistes dans la pratique ; en particulier les nombres d’entrées et de sorties se doivent d’être égaux au nombre de modes identifiés.
C’est pourquoi, dans le cadre de la représentation d’état des systèmes dynamiques, différentes méthodes visant à ré associer deux à deux plusieurs sous-représentations identifiées sont proposées au cours de ce travail. Celles ci permettent de construire un modèle élargi de la structure considérée qui comprend l’ensemble des entrées/sorties et des modes respectivement utilisées et identifiés pour chacune des sous-structures instrumentées. Compte tenu de la difficulté de la problématique, l’identification du modèle espace état initial a été confiée à deux algorithmes (Moesp et N4sidr) issus des puissantes et récentes méthodes d’identification temporelles « sous-espace ».
La représentation d’état globale obtenue, la qualité de l’identification des paramètres modaux et des caractéristiques physiques est évaluée numériquement en détail et expérimentalement sur une poutre encastrée type cantilever.
Cette étude a permis de mettre en valeur l’intérêt certain de ces méthodes de ré association de sous-représentations tout particulièrement, mais non exclusivement, dans l’optique subséquente de l’identification des caractéristiques physiques des structures.
Mots clés
Analyse modale - Identification - Ré association de sous-systèmes - Espace état - Sous-espace
SUBSPACE IDENTIFICATION OF PHYSICAL MATRICES ASSOCIATION OF SUB-SPACE-STATE MODELS
Summary
The dynamical identification of the physical parameters (mass, stiffness, damping matrices) can be of a great interest in the control domain particularly for discrete structures with concentrated masses. Unfortunately, the theoretical background necessary to perform this step is practically difficult to apply. Effectively the number of inputs and outputs must be the same than the number of identified modes.
In the purpose to solve these problems, several methods have been proposed that combine two sub-space-state models of the same structure. This result in an enlarged space-state model comprising of the whole inputs, outputs and modes coming from the sub-space-state models.
To perform beforehand good identifications, two algorithms descending from the new and efficient subspace methods are used : Moesp and N4sidr.
Numerical and experimental evaluations are performed. Once an enlarged space-state model is reached, the modal and physical parameters are computed and the results discussed.
Keywords
Modal analysis - Identification - State-space model - Subspace method
Thèse préparée au Laboratoire de Mécanique et Génie Civil, Université Montpellier II. CC 034 – Place Eugène Bataillon – 34095 Montpellier cedex 05






![Variants of the Brocard-Ramanujan equation · 2019. 2. 7. · Ramanujan Diophantine equation. 1. Introduction Brocard (see [4, 5]), and independently Ramanujan (see [15, 16]), posed](https://img.pdfslide.fr/doc/110x75/60d37e5a0da2ff39e45fd22c/variants-of-the-brocard-ramanujan-equation-2019-2-7-ramanujan-diophantine-equation.jpg)


![MATHEMATIQUES - Equation de la parabole - Bienvenuenotesdecours.drivehq.com/courspdf/MatParabole.pdf · MATHEMATIQUES - Equation de la parabole ... certaine quantité [ c ]. Si [](https://img.pdfslide.fr/doc/110x75/5a78d0a97f8b9a07028eb173/mathematiques-equation-de-la-parabole-b-equation-de-la-parabole-certaine.jpg)

![Cauchy biorthogonal polynomialsmath.usask.ca/~szmigiel/BGS1JAT.pdfPeakons for the Degasperis–Procesi equation. In the early 1990’s, Camassa and Holm [13] introduced the (CH) equation](https://img.pdfslide.fr/doc/110x75/5f8191a3b65bbd7e95588b7e/cauchy-biorthogonal-szmigielbgs1jatpdf-peakons-for-the-degasperisaprocesi-equation.jpg)

















