Embed Size (px)
Citation preview

1Automatique
Introduction à la représentation d'état
UV Automatique
ASI 3
Cours 8
2Automatique
Contenu
! Notion de variables d'état" Exemples
" Définitions
! Représentation d'état d'un système continu LTI" Structure d'un modèle d'état
" Représentation schématique d'un modèle d'état
" Représentations d'état équivalentes
! Linéarisation d'un modèle d'état" Modèle d'état d'un système non-linéaire
" Linéarisation autout d'un point de fonctionnement
3Automatique
Introduction à la notion d'état
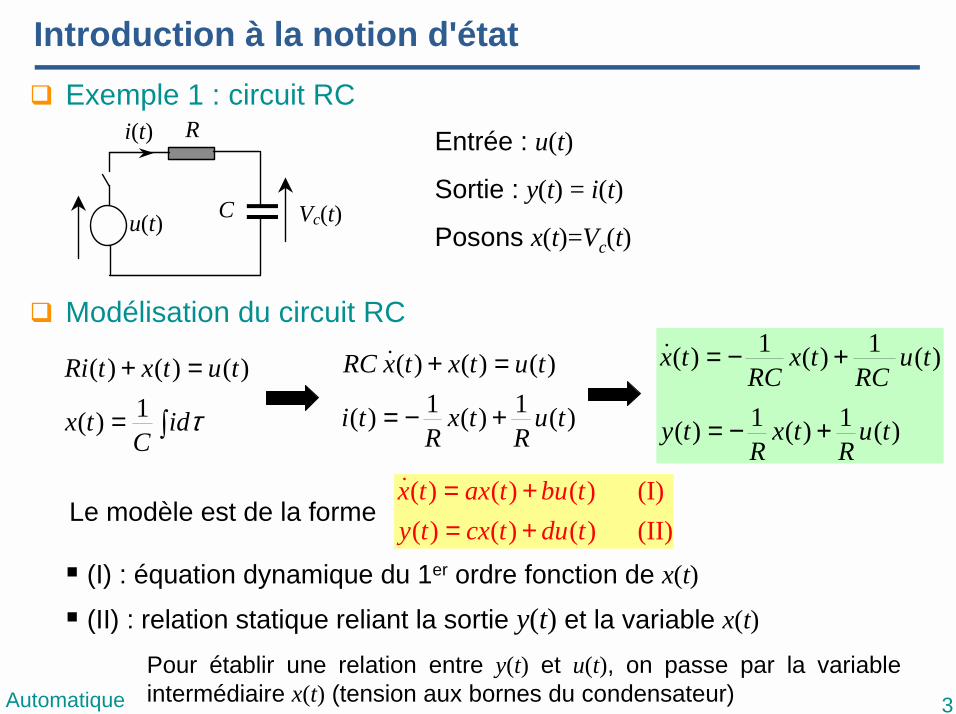
! Exemple 1 : circuit RC
! Modélisation du circuit RC
# (I) : équation dynamique du 1er ordre fonction de x(t)
# (II) : relation statique reliant la sortie y(t) et la variable x(t)
Le modèle est de la forme
R i(t)
C Vc(t) u(t)
∫=
=+
τidC
tx
tutxtRi1)(
)()()(
Entrée : u(t)
Sortie : y(t) = i(t)
Posons x(t)=Vc(t)
)(1)(1)(
)()()(
tuR
txR
ti
tutxtxRC
+−=
=+&
)(1)(1)(
)(1)(1)(
tuR
txR
ty
tuRC
txRC
tx
+−=
+−=&
(II))()()((I))()()(
tdutcxtytbutaxtx
+=+=&
Pour établir une relation entre y(t) et u(t), on passe par la variable intermédiaire x(t) (tension aux bornes du condensateur)
4Automatique
Introduction à la notion d'état : exemple 1
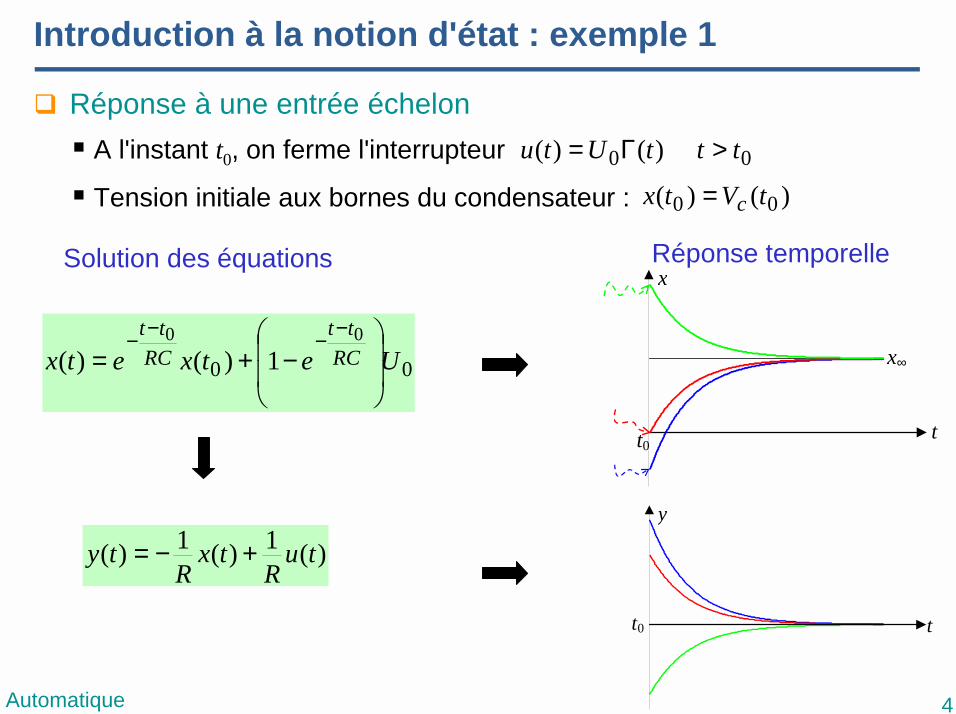
! Réponse à une entrée échelon
Solution des équations
# A l'instant t0, on ferme l'interrupteur
# Tension initiale aux bornes du condensateur : 00 )()( tttUtu >Γ=
)()( 00 tVtx c=
00
001)()( Uetxetx RC
ttRC
tt
−+=
−−−−
Réponse temporelle
)(1)(1)( tuR
txR
ty +−=
t0 t
x
x∞
t0 t
y
5Automatique
Introduction à la notion d'état : exemple 1
! Remarques
! Définitions
# La connaissance de x(t) (et donc de y(t)) sur l'intervalle de temps [t0, t]ne dépend que de la condition initiale x(t0) et des équations (I) et (II)
# La connaissance de x sur l'intervalle de temps ]-∞, t0] n'est pas nécessaire pour déterminer x sur [t0, t]
# Si à l'instant t1, on applique un nouveau signal d'entrée u1(t), l'évolution de x (t) et y (t) dans l'intervalle [t1, t] ne dépendra que de x(t1) et de u1(t)
# x(t) est appelé l'état du circuit électrique
# L'état d'un système à un instant t représente la mémoire minimaledu passé nécessaire à la détermination du futur
# Les équations (I) et (II) définissent entièrement le comportement dynamique du circuit électrique
6Automatique
Introduction à la notion d'état : exemple 2
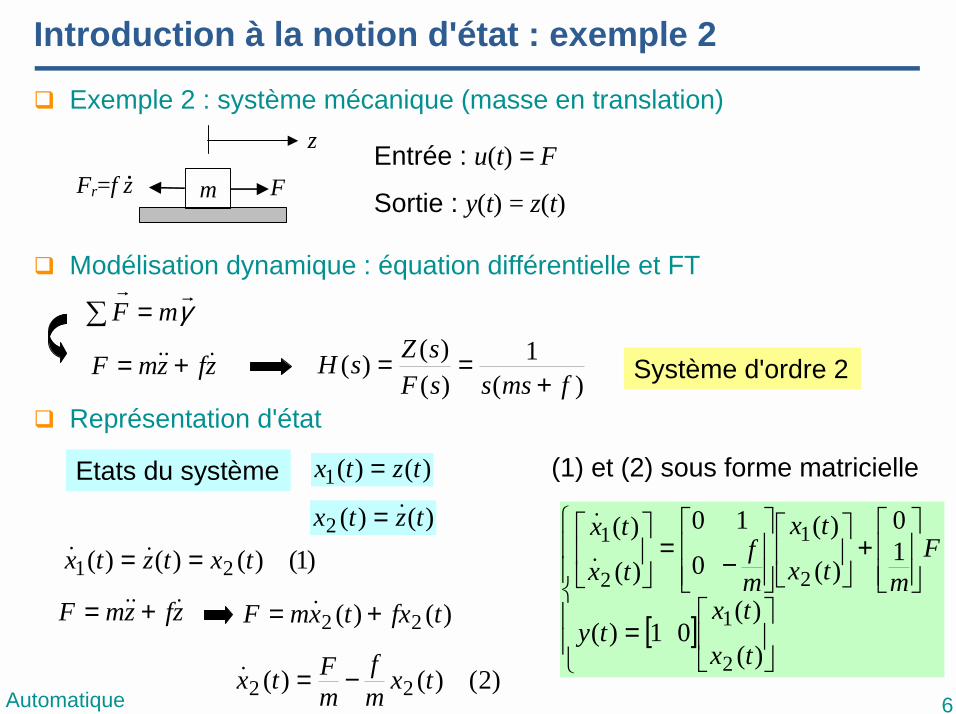
! Exemple 2 : système mécanique (masse en translation)
! Modélisation dynamique : équation différentielle et FT
! Représentation d'état
Etats du système
m F
z
Fr=f z .Entrée : u(t) = F
Sortie : y(t) = z(t)
γrr
mF =∑
zfzmF &&& +=)(
1)()()(
fmsssFsZsH
+==
)()(1 tztx =
)()(2 tztx &=)1()()()( 21 txtztx == &&
zfzmF &&& += )()( 22 tfxtxmF += &
)2()()( 22 txmf
mFtx −=&
(1) et (2) sous forme matricielle
[ ]
=
+
−=
)(
)(01)(
10
)(
)(0
10
)(
)(
2
1
2
1
2
1
tx
txty
Fmtx
tx
mf
tx
tx&
&
Système d'ordre 2
7Automatique
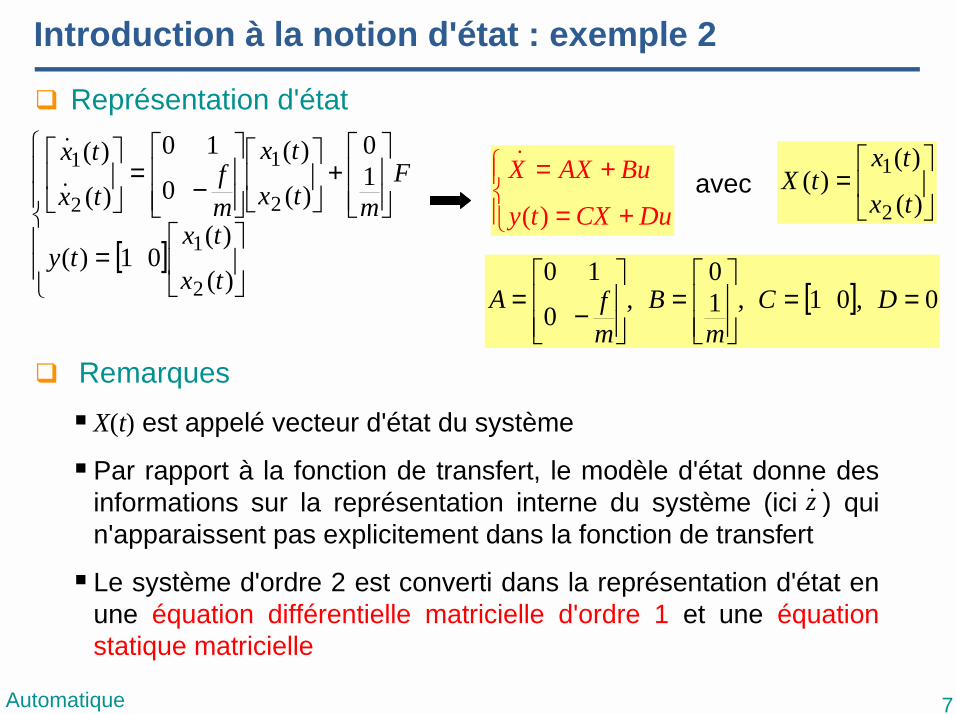
Introduction à la notion d'état : exemple 2
! Représentation d'état
! Remarques
[ ]
=
+
−=
)(
)(01)(
10
)(
)(0
10
)(
)(
2
1
2
1
2
1
tx
txty
Fmtx
tx
mf
tx
tx&
&
avec
=
)(
)()(
2
1
tx
txtX
+=
+=
DuCXty
BuAXX
)(
&
[ ] 0,01,10
,0
10==
=
−= DCm
BmfA
# X(t) est appelé vecteur d'état du système
#Par rapport à la fonction de transfert, le modèle d'état donne des informations sur la représentation interne du système (ici ) qui n'apparaissent pas explicitement dans la fonction de transfert
# Le système d'ordre 2 est converti dans la représentation d'état en une équation différentielle matricielle d'ordre 1 et une équation statique matricielle
z&
8Automatique
Représentation d'état d'un système
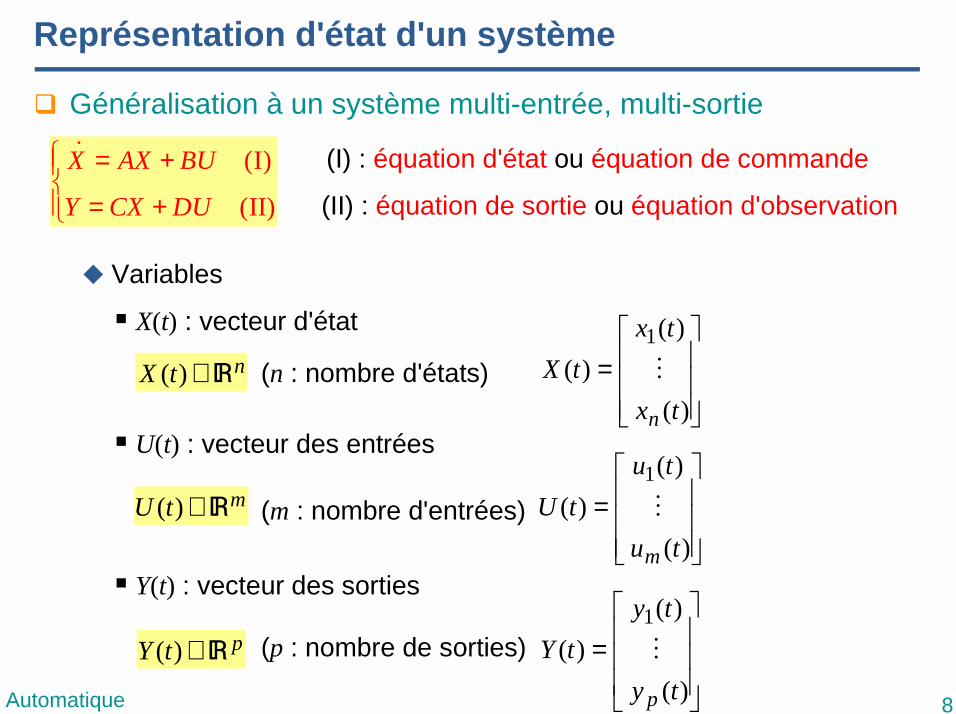
! Généralisation à un système multi-entrée, multi-sortie
" Variables
+=
+=
)II(
)I(
DUCXY
BUAXX&
=
)(
)()(
1
tx
txtX
n
M
# X(t) : vecteur d'état
(n : nombre d'états)
(I) : équation d'état ou équation de commande
(II) : équation de sortie ou équation d'observation
ntX R∈)(
=
)(
)()(
1
tu
tutU
m
M
# U(t) : vecteur des entrées
(m : nombre d'entrées)mtU R∈)(
=)(
)()(
1
ty
tytY
p
M
# Y(t) : vecteur des sorties
(p : nombre de sorties)ptY R∈)(
9Automatique
Représentation d'état d'un système
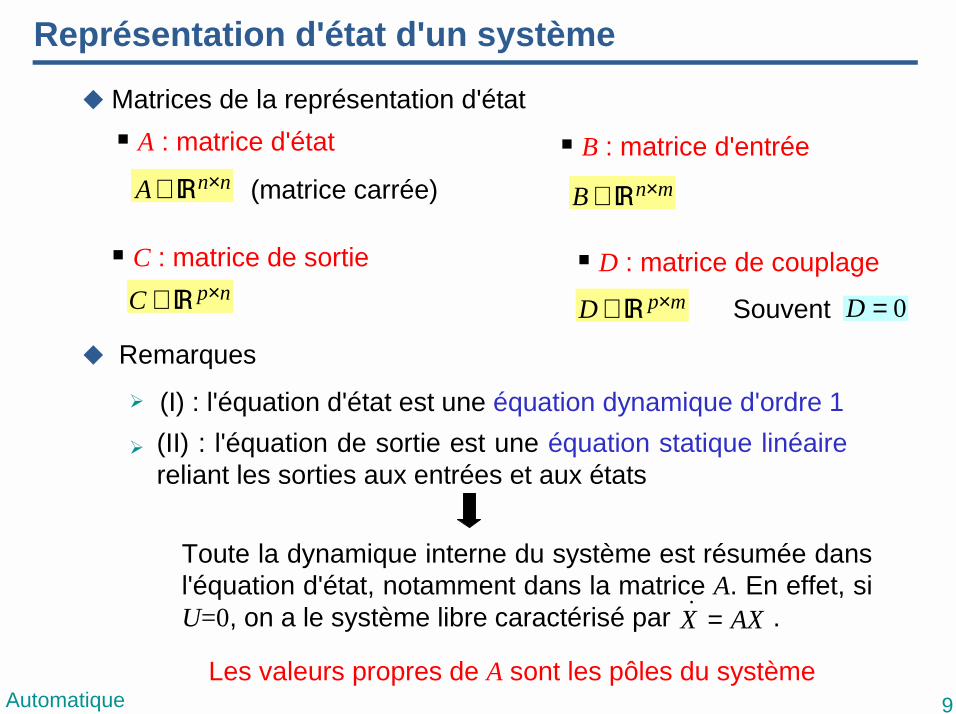
" Matrices de la représentation d'état
" Remarques$
$
# A : matrice d'étatnnA ×∈ R (matrice carrée)
# B : matrice d'entréemnB ×∈ R
# C : matrice de sortienpC ×∈ R
# D : matrice de couplagempD ×∈ R
(I) : l'équation d'état est une équation dynamique d'ordre 1(II) : l'équation de sortie est une équation statique linéairereliant les sorties aux entrées et aux états
Toute la dynamique interne du système est résumée dans l'équation d'état, notamment dans la matrice A. En effet, si U=0, on a le système libre caractérisé par .AXX =&
Souvent 0=D
Les valeurs propres de A sont les pôles du système
10Automatique
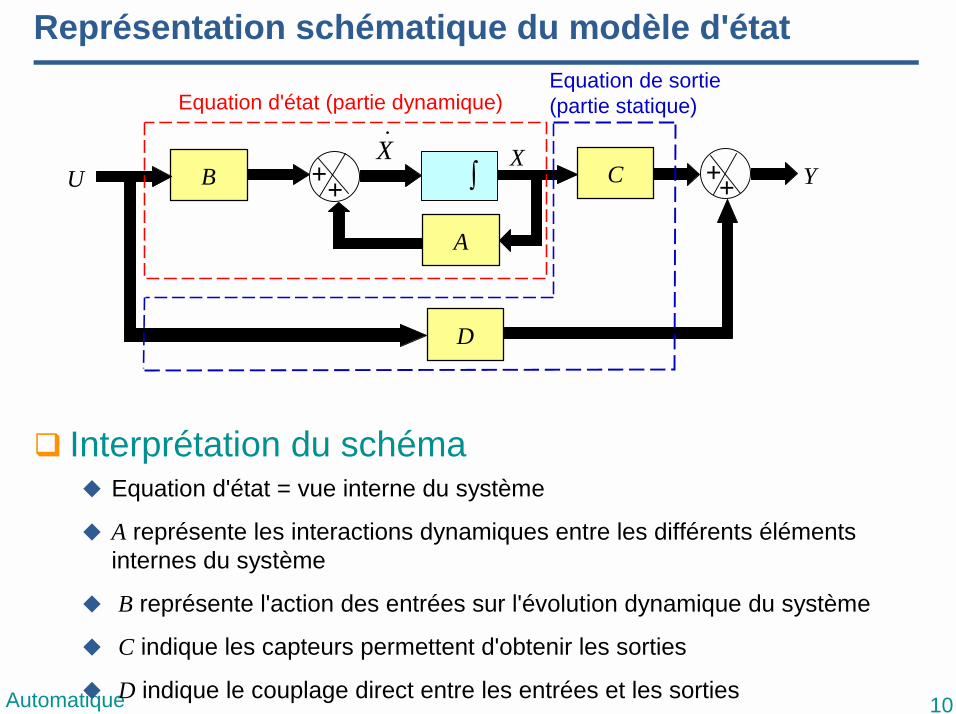
Représentation schématique du modèle d'état
! Interprétation du schéma" Equation d'état = vue interne du système
" A représente les interactions dynamiques entre les différents éléments internes du système
" B représente l'action des entrées sur l'évolution dynamique du système
" C indique les capteurs permettent d'obtenir les sorties
" D indique le couplage direct entre les entrées et les sorties
B U
D
A
∫++++
C
Y
X X&Equation d'état (partie dynamique)
Equation de sortie (partie statique)
11Automatique
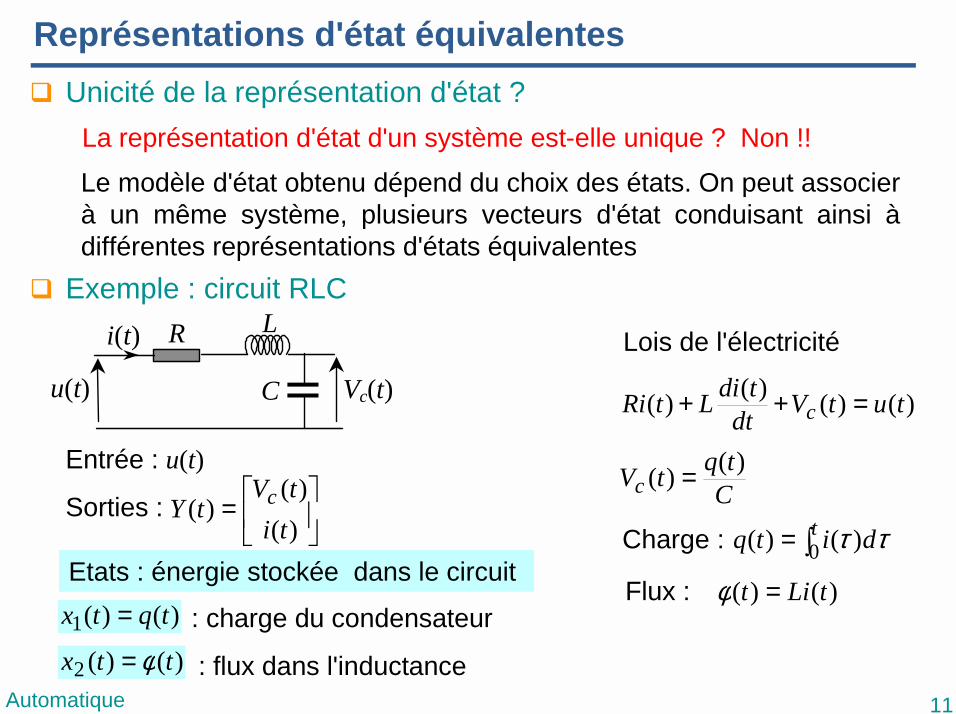
Représentations d'état équivalentes! Unicité de la représentation d'état ?
! Exemple : circuit RLC
La représentation d'état d'un système est-elle unique ? Non !!
Le modèle d'état obtenu dépend du choix des états. On peut associer à un même système, plusieurs vecteurs d'état conduisant ainsi à différentes représentations d'états équivalentes
R
u(t)
i(t)
C Vc(t)
L
)()()()( tutVdttdiLtRi c =++
CtqtVc)()( =
Entrée : u(t)
Sorties :
=
)()(
)(titV
tY c
Etats : énergie stockée dans le circuit)()(1 tqtx =
)()(2 ttx φ=: charge du condensateur
: flux dans l'inductance
Lois de l'électricité
∫= t ditq 0 )()( ττCharge :
Flux : )()( tLit =φ
12Automatique
Représentations d'état équivalentes
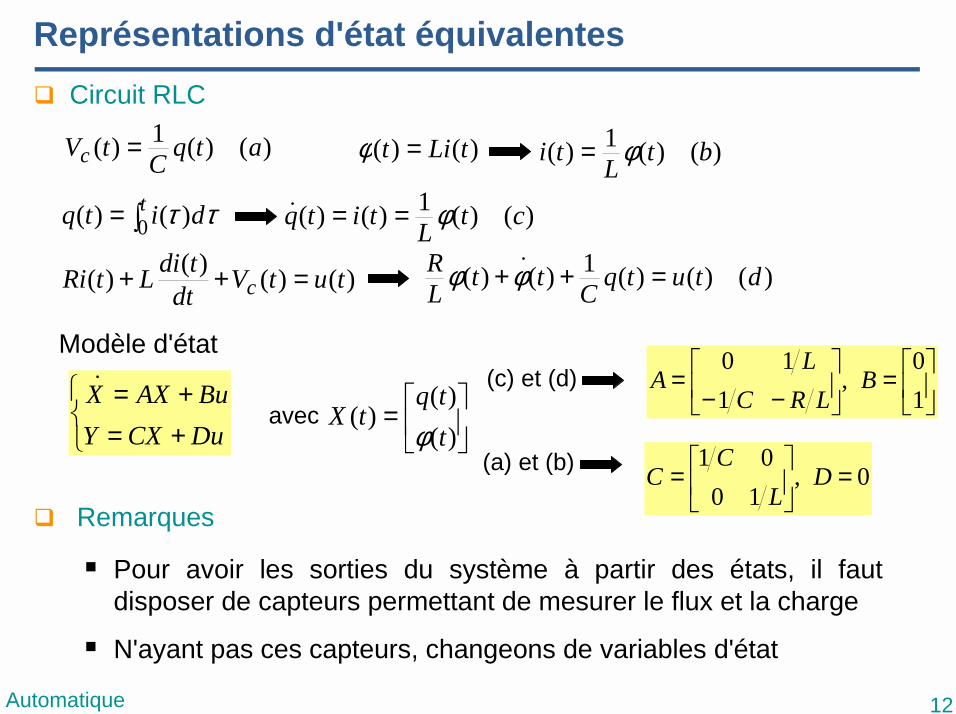
! Circuit RLC
! Remarques
avec
)()()(1)()( dtutqCttLR =++φφ &
)()(1)( atqCtVc =
∫= t ditq 0 )()( ττ
)()( tLit =φ )()(1)( btLti φ=
)()(1)()( ctLtitq φ==&
)()()()( tutVdttdiLtRi c =++
Modèle d'état(c) et (d)
+=+=DuCXYBuAXX&
=
−−
=10
,1
10B
LRCL
A
0,1001
=
= D
LC
C(a) et (b)
=
)()(
)(ttq
tXφ
# Pour avoir les sorties du système à partir des états, il faut disposer de capteurs permettant de mesurer le flux et la charge
# N'ayant pas ces capteurs, changeons de variables d'état
13Automatique
Représentations d'état équivalentes
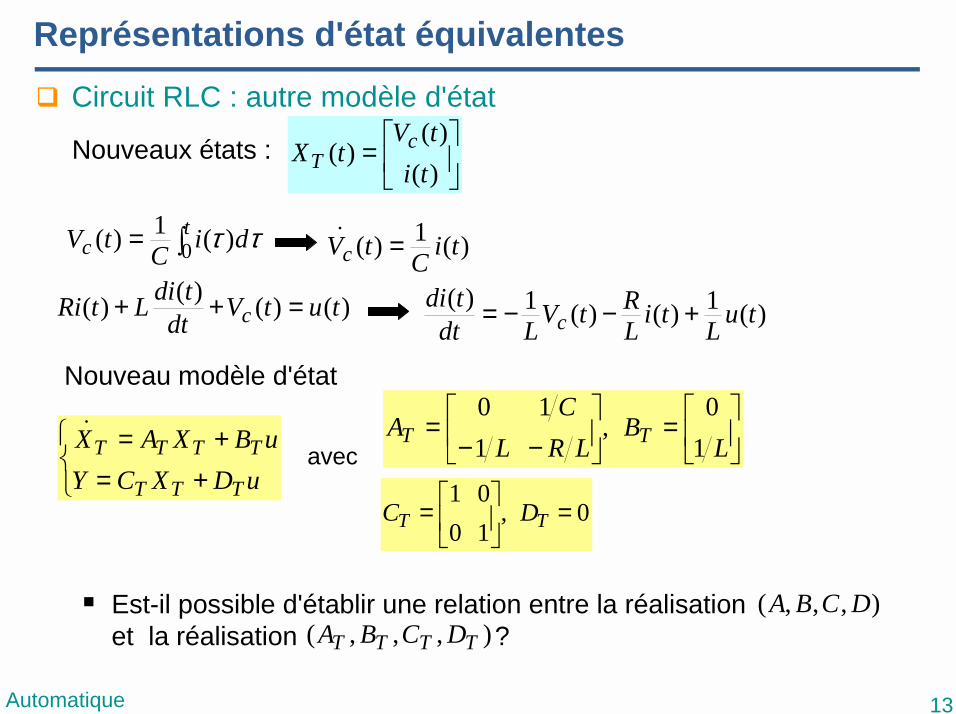
! Circuit RLC : autre modèle d'état
Nouveaux états :
=
)()(
)(titV
tX cT
∫= tc diCtV 0 )(1)( ττ )(1)( tiCtVc =&
)()()()( tutVdttdiLtRi c =++ )(1)()(1)( tuLtiL
RtVLdttdi
c +−−=
avec
Nouveau modèle d'état
+=+=
uDXCYuBXAX
TTT
TTTT&
=
−−
=L
BLRL
CA TT 1
0,
110
0,1001
=
= TT DC
# Est-il possible d'établir une relation entre la réalisation et la réalisation ?
),,,( DCBA),,,( TTTT DCBA
14Automatique
Représentations d'état équivalentes
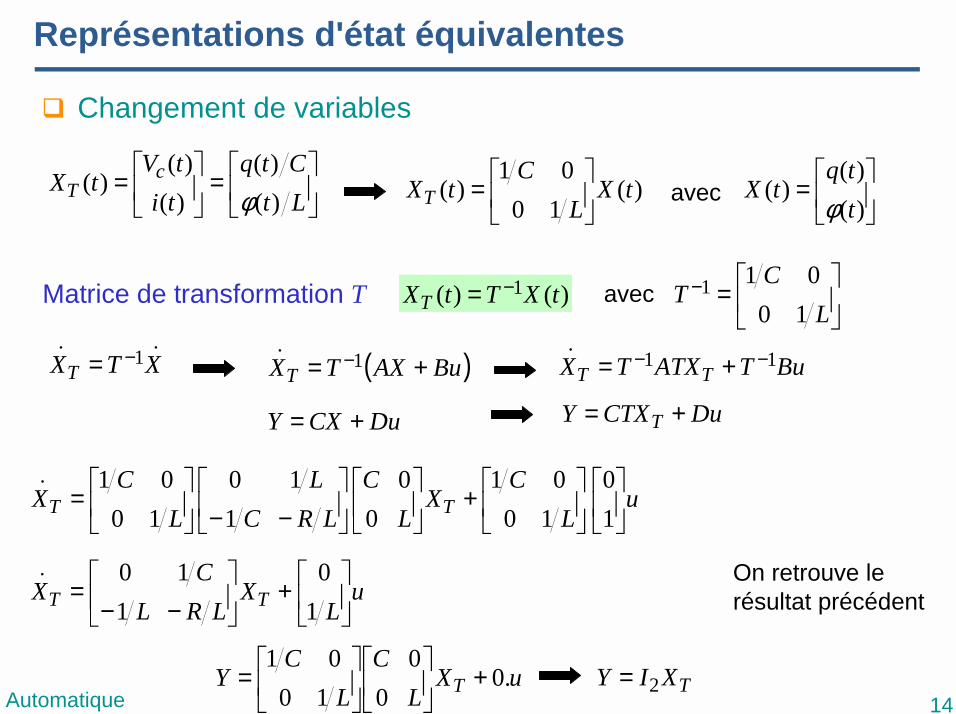
! Changement de variables
=
)()(
)(ttq
tXφ
=
=
LtCtq
titV
tX cT )(
)()()(
)(φ )(
1001
)( tXL
CtXT
= avec
Matrice de transformation T )()( 1 tXTtXT−=
=−
LC
T10011
XTXT&& 1−=
avec
( )BuAXTXT += −1& BuTATXTX TT11 −− +=&
DuCXY += DuCTXY T +=
uL
CX
LC
LRCL
LC
X TT
+
−−
=
10
1001
00
110
1001&
uL
XLRL
CX TT
+
−−
=10
110&
uXL
CL
CY T .0
00
1001
+
= TXIY 2=
On retrouve le résultat précédent
15Automatique
Représentations d'état équivalentes
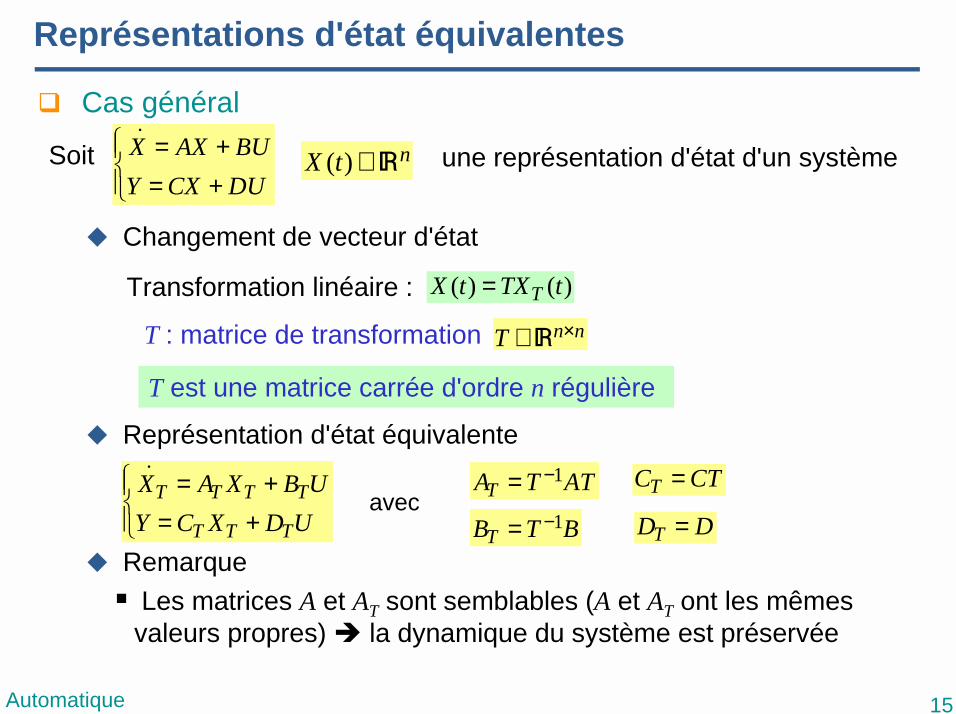
! Cas général
" Changement de vecteur d'état
" Représentation d'état équivalente
" Remarque# Les matrices A et AT sont semblables (A et AT ont les mêmes
valeurs propres) % la dynamique du système est préservée
Soit
+=+=DUCXYBUAXX& une représentation d'état d'un systèmentX R∈)(
Transformation linéaire : )()( tTXtX T=
T : matrice de transformation nnT ×∈ R
T est une matrice carrée d'ordre n régulière
avec
+=+=
UDXCYUBXAX
TTT
TTTT& ATTAT
1−= CTCT =
BTBT1−= DDT =
16Automatique
Choix des variables d'état
! Préliminaires et définitions# L'état d'un système à l'instant t0 est un n-uplet X(t0) d'un espace E
dont la connaissance associée à celle de l'entrée u(t) dans l'intervalle [t0, t] permet de connaître la sortie y(t).
# E est appelé espace d'état. E est un sous-espace de Rn.
# Le nombre minimal d'état correspond à l'ordre du système
# Le concept d'état découle donc d'une suite de grandeurs physiques (courant, vitesse, …) ou non suffisantes pour caractériser le fonctionnement d'un système. Le choix des états est laissé au libre arbitre du concepteur
#Par une transformation linéaire, il est possible de passer d'unereprésentation d'état à une autre équivalente
# Un système admet donc une infinité de représentation d'état
#Par la transformation linéaire , on peut avoir des variables d'état qui physiquement ne correspondent à rien
)()( tTXtX T=
17Automatique
Choix des variables d'état
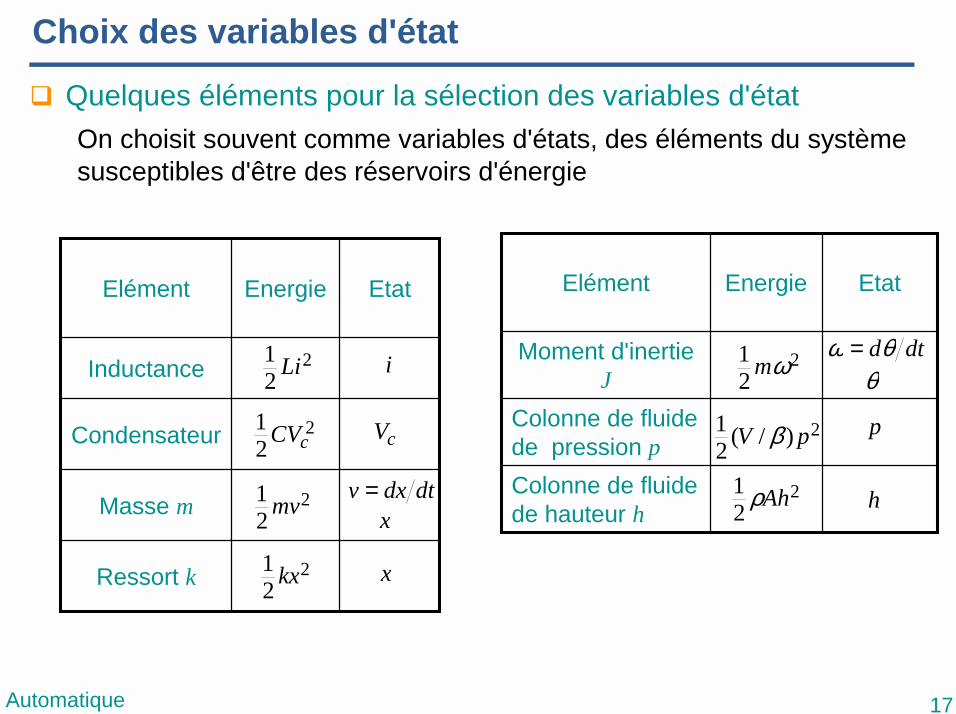
! Quelques éléments pour la sélection des variables d'étatOn choisit souvent comme variables d'états, des éléments du système susceptibles d'être des réservoirs d'énergie
Masse m
Ressort k
Inductance
Condensateur
EtatEnergieElément
Colonne de fluide de pression p
Moment d'inertie J
Colonne de fluide de hauteur h
EtatEnergieElément
221
cCV cV
221 Li i
221 mv
221 kx
dtdxv =
x
2)/(21 pV β
221 ωm
x
dtdθω =θ
p
221 Ahρ h
18Automatique
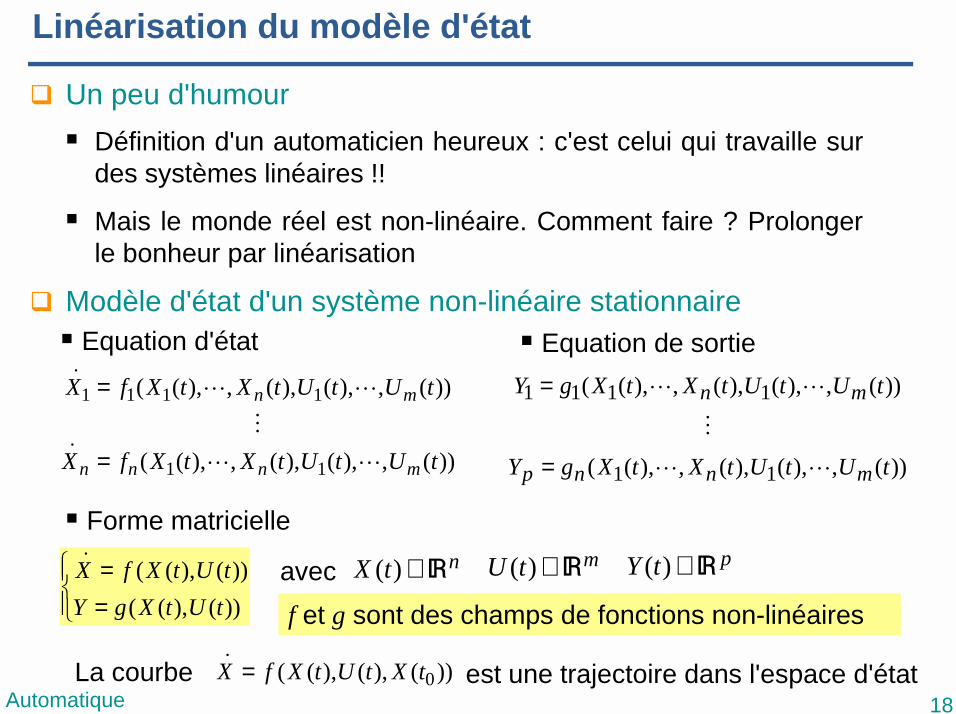
Linéarisation du modèle d'état
! Un peu d'humour
! Modèle d'état d'un système non-linéaire stationnaire
# Définition d'un automaticien heureux : c'est celui qui travaille sur des systèmes linéaires !!
# Mais le monde réel est non-linéaire. Comment faire ? Prolonger le bonheur par linéarisation
==
))(),(())(),((
tUtXgYtUtXfX& ntX R∈)( mtU R∈)( ptY R∈)(avec
f et g sont des champs de fonctions non-linéaires
La courbe est une trajectoire dans l'espace d'état))(),(),(( 0tXtUtXfX =&
# Forme matricielle
))(,),(),(,),((
))(,),(),(,),((
11
1111
tUtUtXtXfX
tUtUtXtXfX
mnnn
mn
LL&M
LL&
=
=
))(,),(),(,),((
))(,),(),(,),((
11
1111
tUtUtXtXgY
tUtUtXtXgY
mnnp
mn
LL
M
LL
=
=
# Equation d'état # Equation de sortie
19Automatique
Linéarisation du modèle d'état
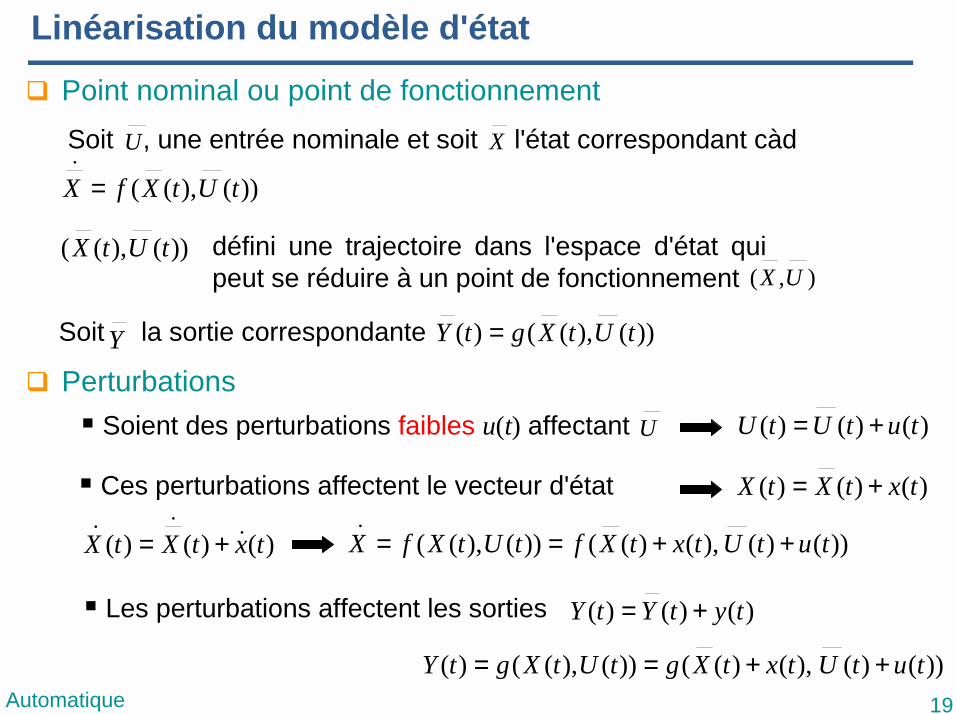
! Point nominal ou point de fonctionnement
! Perturbations
Soit , une entrée nominale et soit l'état correspondant càd
# Soient des perturbations faibles u(t) affectant
défini une trajectoire dans l'espace d'état qui peut se réduire à un point de fonctionnement
))(),(( tUtXfX =&
U X
))(),(( tUtX),( UX
U )()()( tutUtU +=
)()()( txtXtX +=# Ces perturbations affectent le vecteur d'état
)()()( tytYtY +=
)()()( txtXtX &&& += ))()(),()(())(),(( tutUtxtXftUtXfX ++==&
))(),(()( tUtXgtY =Soit la sortie correspondanteY
# Les perturbations affectent les sorties
))()(),()(())(),(()( tutUtxtXgtUtXgtY ++==
20Automatique
Linéarisation du modèle d'état
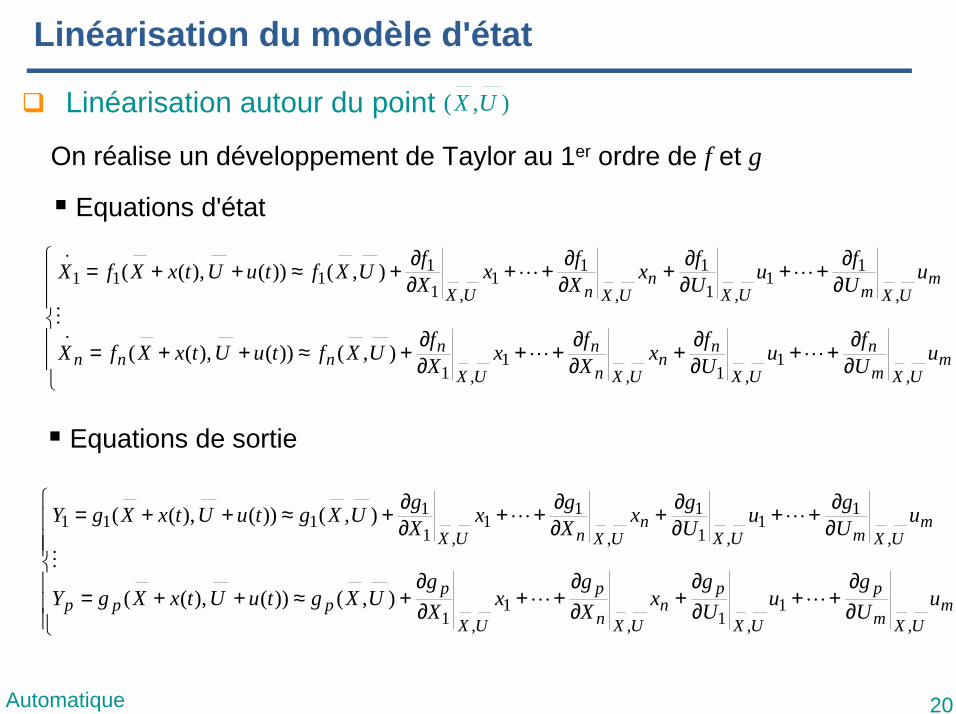
! Linéarisation autour du point ),( UX
On réalise un développement de Taylor au 1er ordre de f et g
∂∂
++∂∂
+∂∂
++∂∂
+≈++=
∂∂++∂
∂+∂∂++∂
∂+≈++=
mUXm
p
UX
pn
UXn
p
UX
pppp
mUXmUX
nUXnUX
uUg
uUg
xXg
xXg
UXgtuUtxXgY
uUguU
gxXgxX
gUXgtuUtxXgY
,1
,1,1
,1
,
11
,11
,
11
,11
111
),())(),((
),())(),((
LL
M
LL
# Equations d'état
# Equations de sortie
∂∂++∂
∂+∂∂++∂
∂+≈++=
∂∂++∂
∂+∂∂++∂
∂+≈++=
mUXm
n
UX
nn
UXnn
UX
nnnn
mUXmUX
nUXnUX
uUfuU
fxXfxX
fUXftuUtxXfX
uUfuU
fxXfxX
fUXftuUtxXfX
,1
,1,1
,1
,
11
,11
,
11
,11
111
),())(),((
),())(),((
LL&M
LL&
21Automatique
Linéarisation du modèle d'état
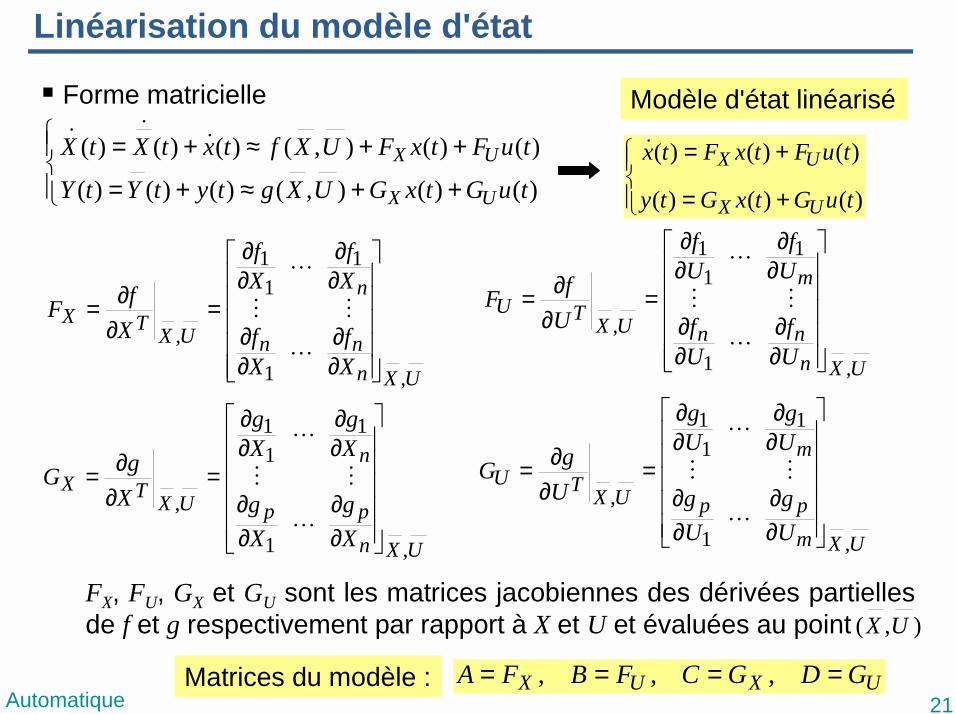
# Forme matricielle
++≈+=
++≈+=
)()(),()()()(
)()(),()()()(
tuGtxGUXgtytYtY
tuFtxFUXftxtXtX
UX
UX&&&
+=
+=
)()()(
)()()(
tuGtxGty
tuFtxFtx
UX
UX&
Modèle d'état linéarisé
UXnnn
n
UXTX
Xf
Xf
Xf
Xf
XfF
,1
111
,
∂∂
∂∂
∂∂
∂∂
=∂∂=
L
MM
L
UXnnn
m
UXTU
Uf
Uf
Uf
Uf
UfF
,1
11
1
,
∂∂
∂∂
∂∂
∂∂
=∂∂=
L
MM
L
UXnpp
n
UXTX
Xg
Xg
Xg
Xg
XgG
,1
111
,
∂∂
∂∂
∂∂
∂∂
=∂∂=
L
MM
L
UXmpp
m
UXTU
Ug
Ug
Ug
Ug
UgG
,1
111
,
∂∂
∂∂
∂∂
∂∂
=∂∂=
L
MM
L
FX, FU, GX et GU sont les matrices jacobiennes des dérivées partielles de f et g respectivement par rapport à X et U et évaluées au point ),( UX
UXUX GDGCFBFA ==== ,,,Matrices du modèle :
22Automatique
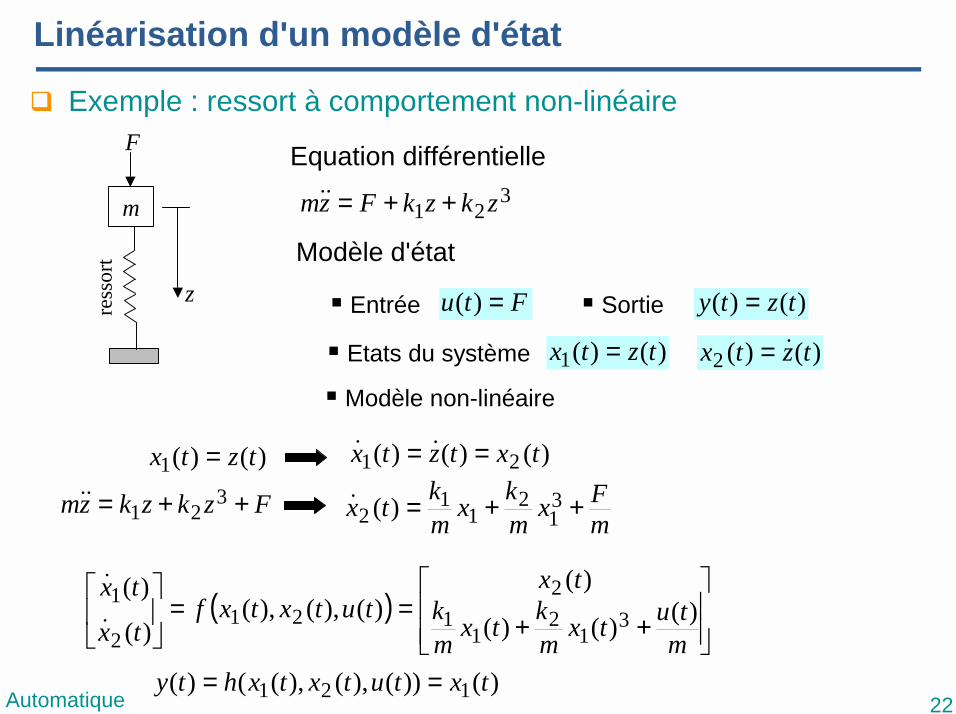
Linéarisation d'un modèle d'état
! Exemple : ressort à comportement non-linéaire
m
z
ress
ort
F Equation différentielle3
21 zkzkFzm ++=&&
Modèle d'état
# Modèle non-linéaire
# Etats du système )()(1 tztx = )()(2 tztx &=
)()(1 tztx = )()()( 21 txtztx == &&
Fzkzkzm ++= 321&&
mFxm
kxmktx ++= 3
12
11
2 )(&
( )
++==
mtutxm
ktxmk
txtutxtxf
tx
tx)()()(
)()(),(),(
)(
)(3
12
11
221
2
1&
&
# Entrée Ftu =)( # Sortie )()( tzty =
)())(),(),(()( 121 txtutxtxhty ==
23Automatique
Linéarisation d'un modèle d'état
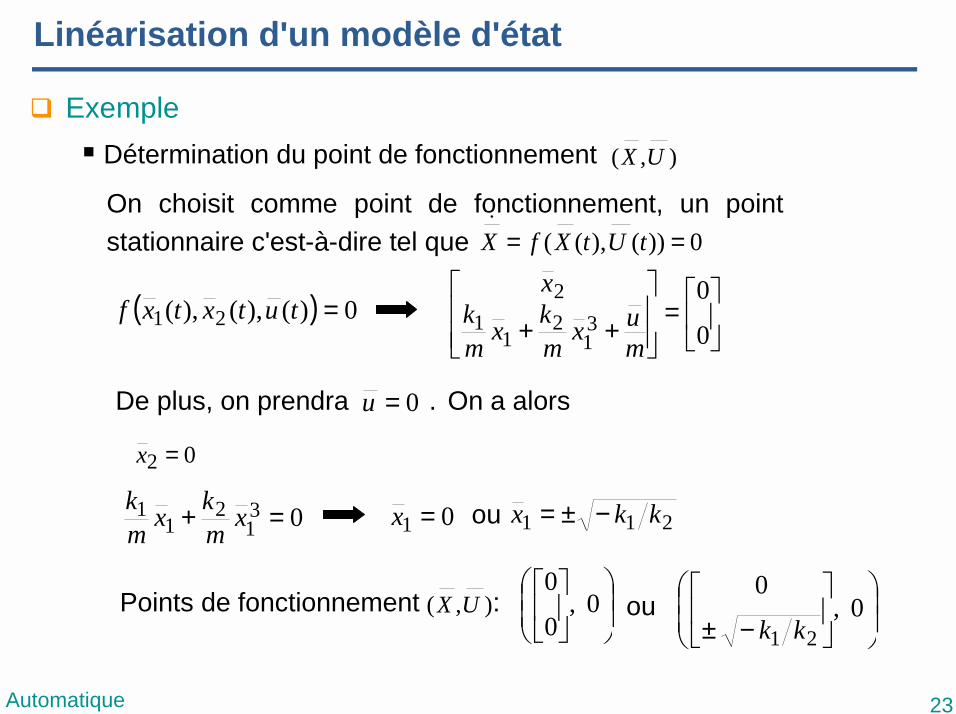
! Exemple# Détermination du point de fonctionnement ),( UX
On choisit comme point de fonctionnement, un point stationnaire c'est-à-dire tel que
( ) 0)(),(),( 21 =tutxtxf
0))(),(( == tUtXfX&
=
++ 0
031
21
12
muxm
kxmk
x
02 =x
031
21
1 =+ xmkxm
k
De plus, on prendra .0=u On a alors
01 =x 211 kkx −±=ou
Points de fonctionnement :
0,
0
0ou
−±0,
0
21 kk),( UX
24Automatique
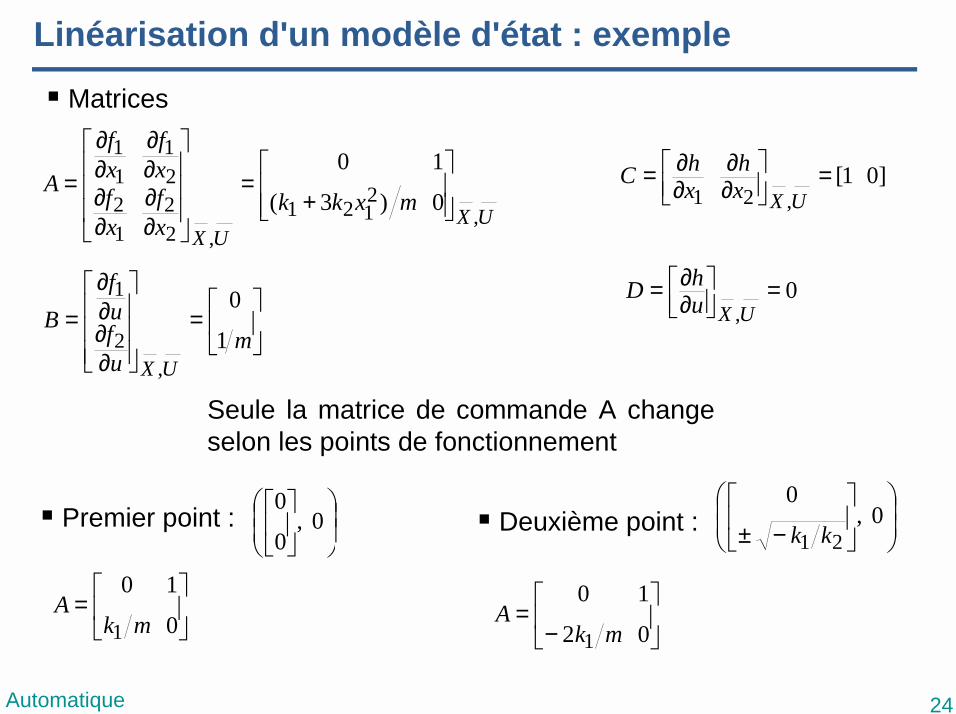
Linéarisation d'un modèle d'état : exemple
# Premier point :
0,
0
0
UXUX
mxkkxf
xf
xf
xf
A,
2121
,22
12
21
11
0)3(
10
+=
∂∂
∂∂
∂∂
∂∂
=
=
∂∂∂∂
=m
ufuf
B
UX1
0
,2
1
]01[,21
=
∂∂
∂∂=
UXxh
xhC
=
0
10
1 mkA
0,
=
∂∂=
UXuhD
# Matrices
# Deuxième point :
−±0,
0
21 kk
−=
02
10
1 mkA
Seule la matrice de commande A change selon les points de fonctionnement