Embed Size (px)
DESCRIPTION
cours
Citation preview
1MK02 : Mécanique des systèmes
MK02 : MMK02 : Méécanique des systcanique des systèèmes mes
« Approche Newtonienne de la mécanique des solides
»
2MK02 : Mécanique des systèmes
Plan du coursPlan du cours
1 Modélisation des systèmes mécaniques :Rappels sur les bases, les repères, les coordonnées.Rappels sur les produits scalaire et vectoriel.Paramétrage dans l’espace, matrice de changement de repère.Modélisation de liaisons particulières : ressort et amortisseur
2 Cinématique du solide :Vitesse d’un point matériel et dérivation vectorielVitesse d’un point coïncident à un solideMouvements particuliers des solidesCIR, base et roulantesThéorie cinématique des mécanismes
3 Aspect dynamique des systèmes :Masse et centre de masseOpérateur d’inertie des solides.Principe fondamental de la dynamique et applications.Théorie dynamique des mécanismes
3MK02 : Mécanique des systèmes
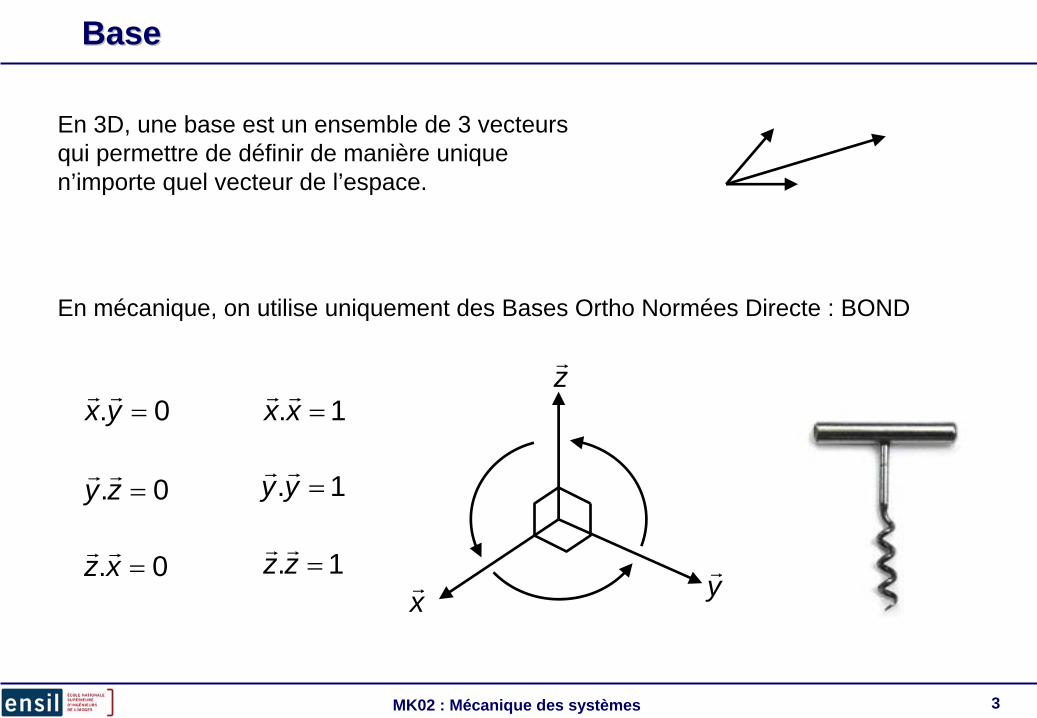
BaseBase
En 3D, une base est un ensemble de 3 vecteurs qui permettre de définir de manière unique n’importe quel vecteur de l’espace.
En mécanique, on utilise uniquement des Bases Ortho Normées Directe : BOND
xr y
r
zr
0. =yxrr
0. =zyrr
0. =xzrr
1. =xxrr
1. =yyrr
1. =zzrr
4MK02 : Mécanique des systèmes
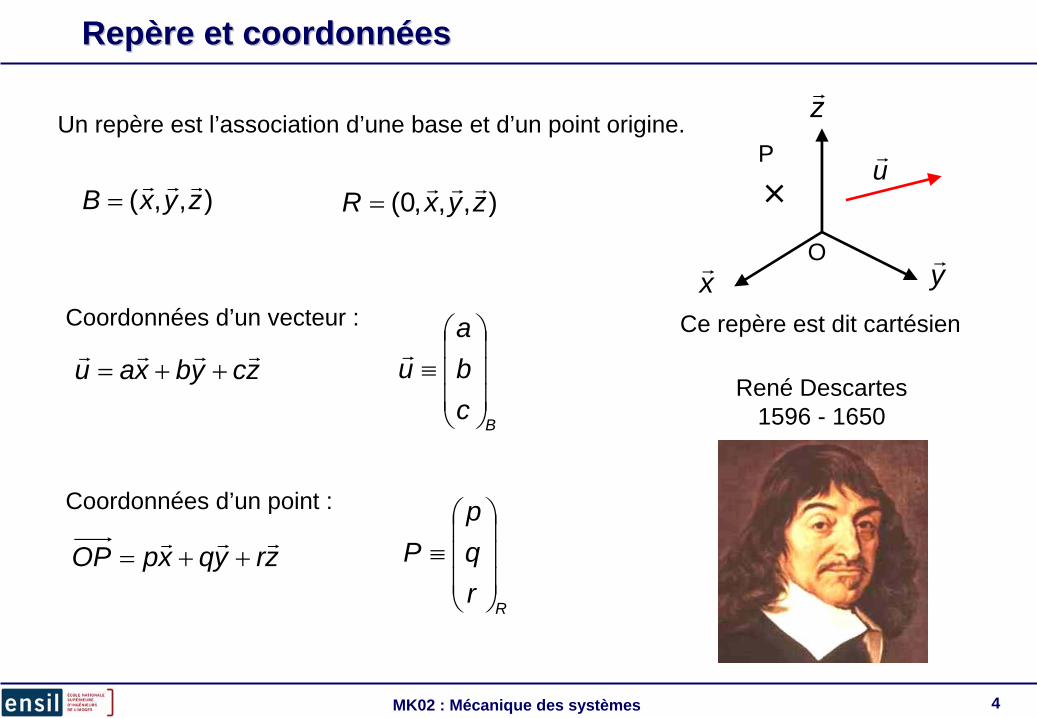
RepRepèère et coordonnre et coordonnééeses
Un repère est l’association d’une base et d’un point origine.
xr y
r
zr
Coordonnées d’un vecteur :
O
ur
),,( zyxBrrr
= ),,,0( zyxRrrr
=
P
zcybxaurrrr
++=
Bcba
u⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
Coordonnées d’un point :
zryqxpOPrrr
++=
Rrqp
P⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
Ce repère est dit cartésien
René Descartes1596 - 1650

5MK02 : Mécanique des systèmes
CoordonnCoordonnéées particulies particulièèresres
Coordonnées cylindriques
xr
yr
zr
O
θur
rur
RcyRcah
r
cba
P⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡ θ
P
θ r
h
xr
yr
zr
Oθur
rur
P
θ
r
ϕ
RspRca
r
cba
P⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
ϕθ
Coordonnées sphériques
ϕur
6MK02 : Mécanique des systèmes
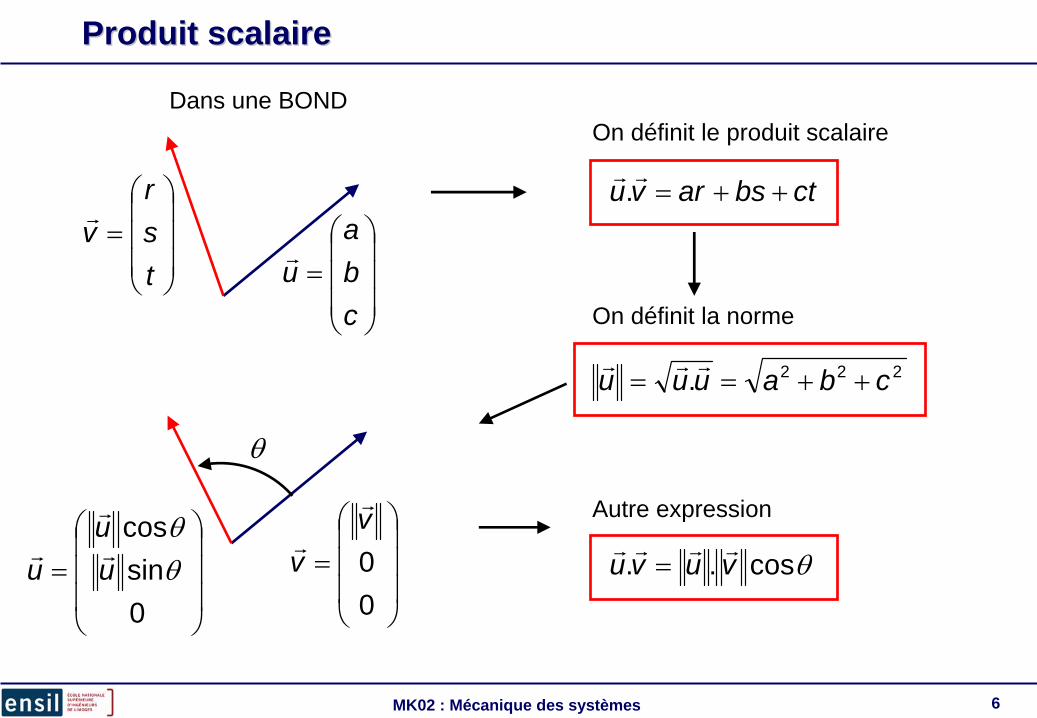
Produit scalaireProduit scalaire
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
cba
ur⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
tsr
vr
Dans une BONDOn définit le produit scalaire
ctbsarvu ++=rr
.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=0sincos
θθ
uu
ur
r
r
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=00v
v
r
r
On définit la norme
222. cbauuu ++==rrr
θ
Autre expression
θcos.. vuvurrrr
=

7MK02 : Mécanique des systèmes
PropriPropriééttéés du produit scalaires du produit scalaire
Commutatif : uvvurrrr
.. = Bilinéaire : wuvuwvurrrrrrr
..).( λλ +=+
ur
vr θ
)(.cos.. / vprojorthouvuvu u
rrrrrrr== θ
Interprétation géométrique : projection orthogonale
Relation fondamentale entre produit scalaire et coordonnées dans une BOND ),,( zyxrrr
zzuyyuxxuurrrrrrrrrr
).().().( ++=
vuvurrrr
⊥⇔= 0.
[ ]°∈ 90,0θ
8MK02 : Mécanique des systèmes
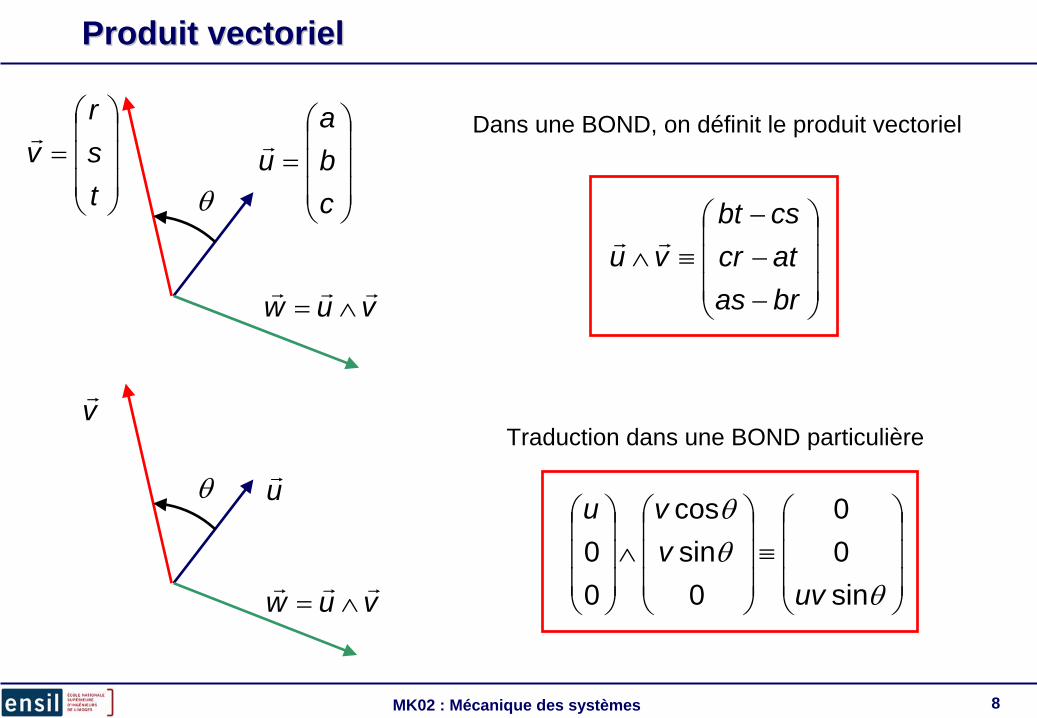
Produit vectorielProduit vectoriel
θ
vuwrrr
∧=
ur
vr
θ
vuwrrr
∧=
Dans une BOND, on définit le produit vectoriel
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
≡∧brasatcrcsbt
vurr
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
tsr
vr
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
cba
ur
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛∧
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
θθθ
sin00
0sincos
00
uvvvu
Traduction dans une BOND particulière
9MK02 : Mécanique des systèmes
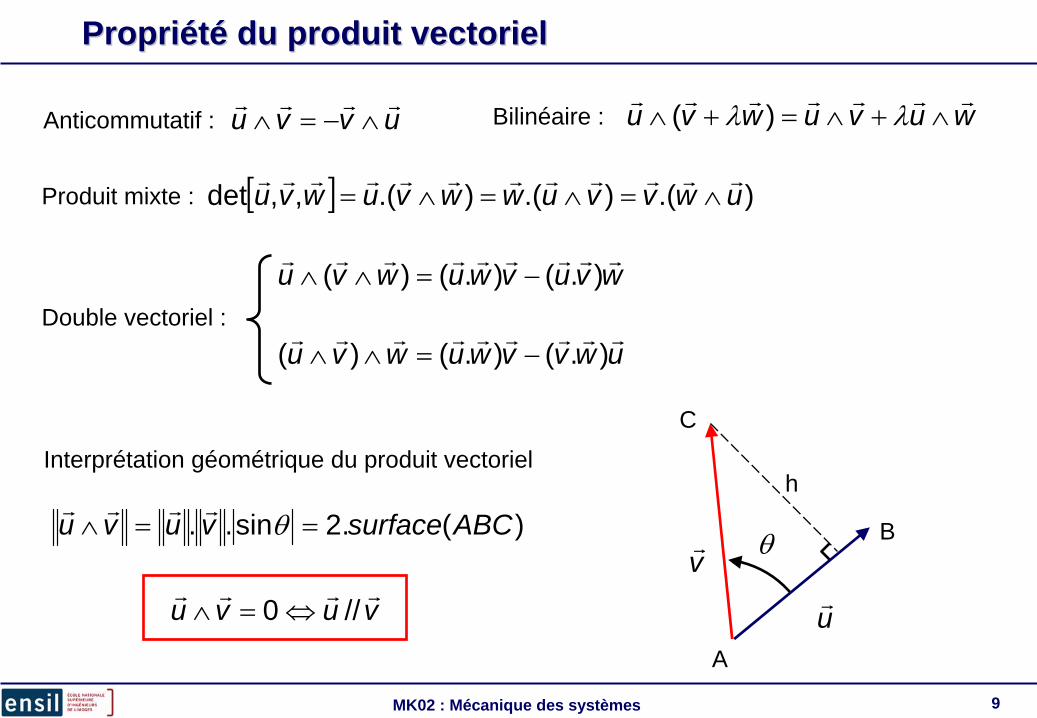
PropriPropriééttéé du produit vectorieldu produit vectoriel
Anticommutatif : uvvurrrr
∧−=∧ Bilinéaire : wuvuwvurrrrrrr
∧+∧=+∧ λλ )(
Produit mixte : [ ] ).().().(,,det uwvvuwwvuwvurrrrrrrrrrrr
∧=∧=∧=
Double vectoriel :
wvuvwuwvurrrrrrrrr
).().()( −=∧∧
uwvvwuwvurrrrrrrrr
).().()( −=∧∧
ur
vr θ
)(.2sin.. ABCsurfacevuvu ==∧ θrrrr
Interprétation géométrique du produit vectoriel
A
B
C
vuvurrrr
//0 ⇔=∧
h
10MK02 : Mécanique des systèmes
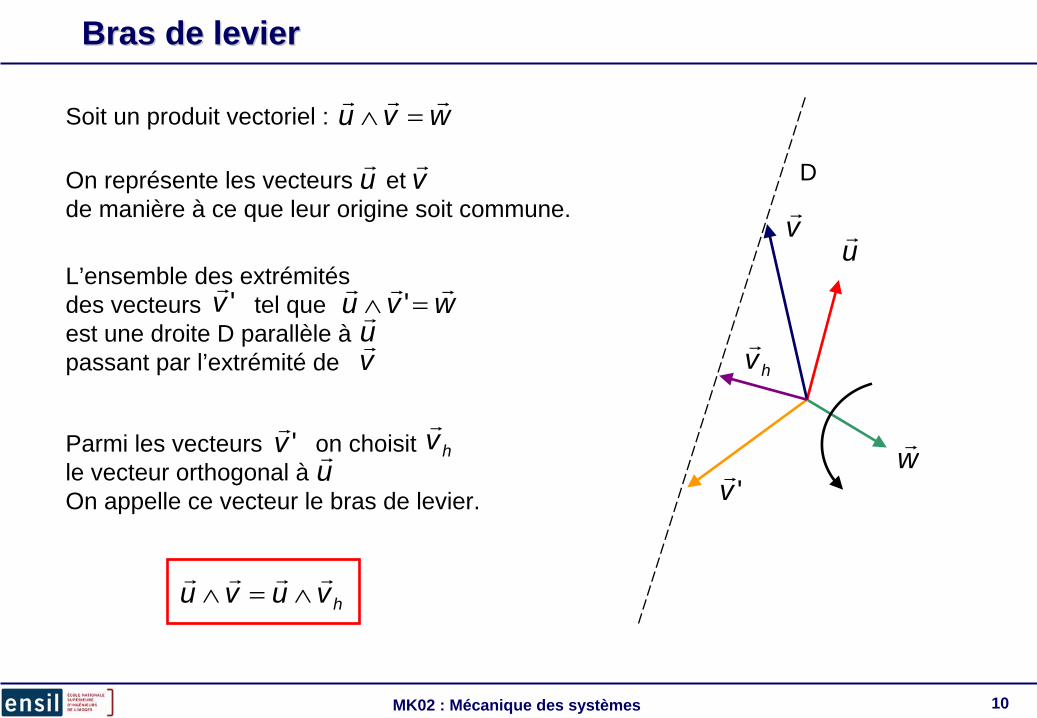
Bras de levierBras de levier
Soit un produit vectoriel : wvurrr
=∧
urv
r
wr
D
'vr
hvr
On représente les vecteurs et de manière à ce que leur origine soit commune.
ur
vr
L’ensemble des extrémitésdes vecteurs tel queest une droite D parallèle àpassant par l’extrémité de
ur
vr
'vr
wvurrr
=∧ '
Parmi les vecteurs on choisitle vecteur orthogonal àOn appelle ce vecteur le bras de levier.
'vr
hvr
ur
hvuvurrrr
∧=∧
11MK02 : Mécanique des systèmes
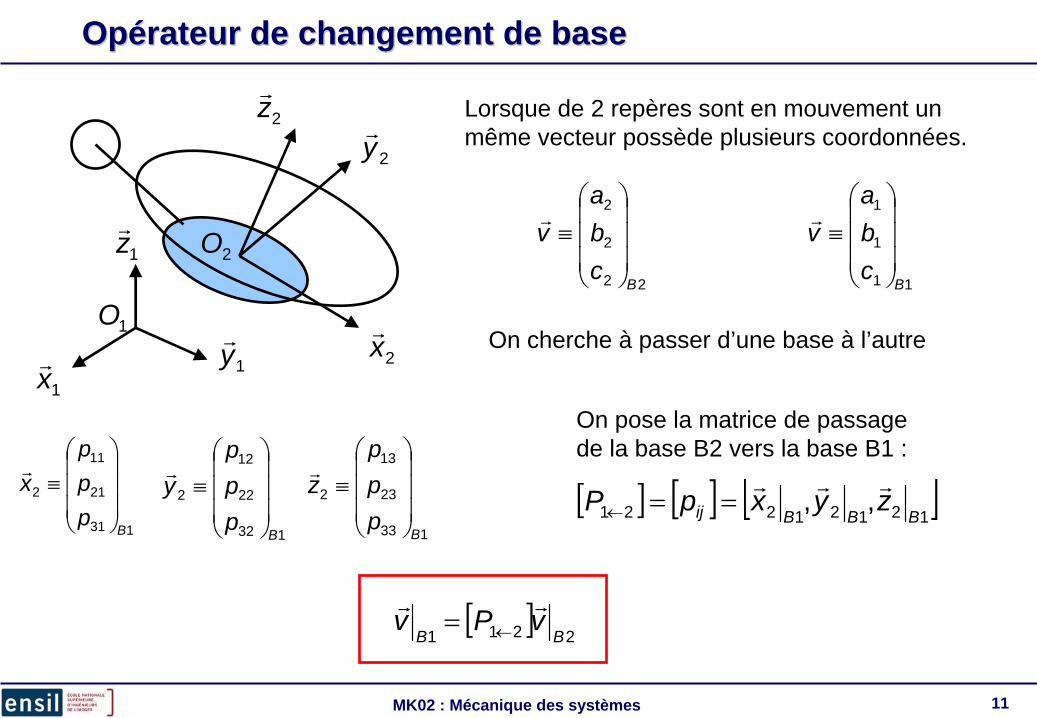
OpOpéérateur de changement de baserateur de changement de base
1xr 1y
r
1zr
11
1
1
Bcba
v⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
22
2
2
Bcba
v⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
1O2xr
2yr2z
r
2O
On cherche à passer d’une base à l’autre
131
21
11
2
Bppp
x⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
132
22
12
2
Bppp
y⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
133
23
13
2
Bppp
z⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
r
[ ]2211 BB
vPvrr
←=
On pose la matrice de passage de la base B2 vers la base B1 :
[ ] [ ] [ ]12121221 ,,
BBBij zyxpPrrr
==←
Lorsque de 2 repères sont en mouvement un même vecteur possède plusieurs coordonnées.
12MK02 : Mécanique des systèmes
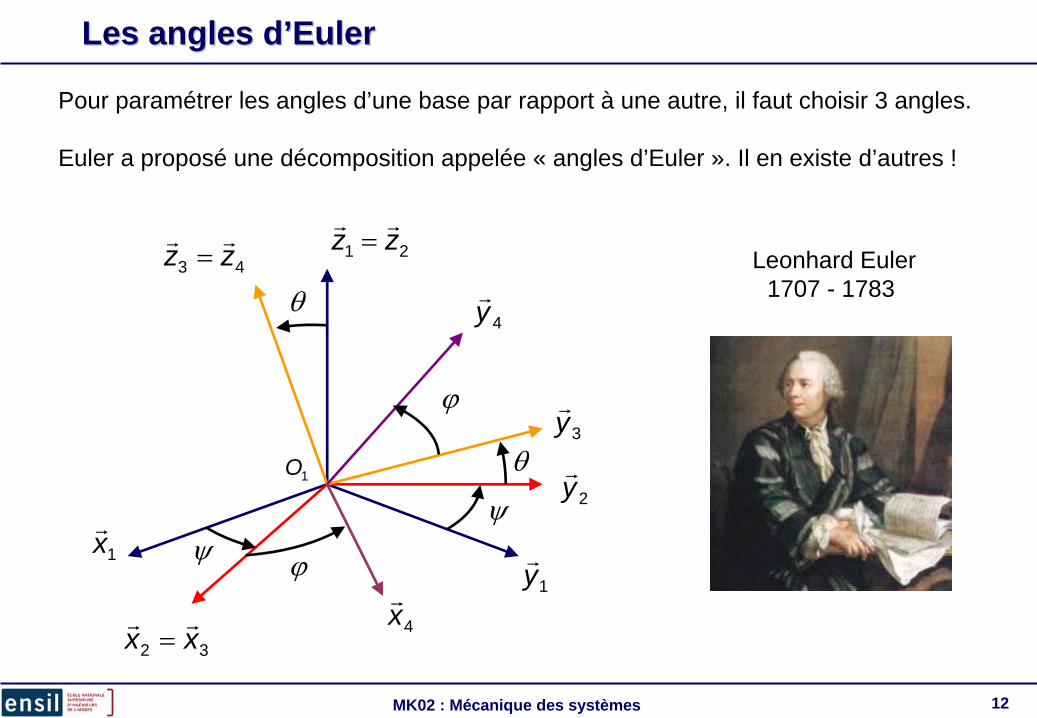
Les angles dLes angles d’’EulerEuler
1xr
1yr
21 zzrr
=
1O
43 zzrr
=
32 xxrr
= 4xr
2yr
3yr
4yrθ
θ
ϕ
ϕ
ψψ
Pour paramétrer les angles d’une base par rapport à une autre, il faut choisir 3 angles.
Euler a proposé une décomposition appelée « angles d’Euler ». Il en existe d’autres !
Leonhard Euler1707 - 1783
13MK02 : Mécanique des systèmes
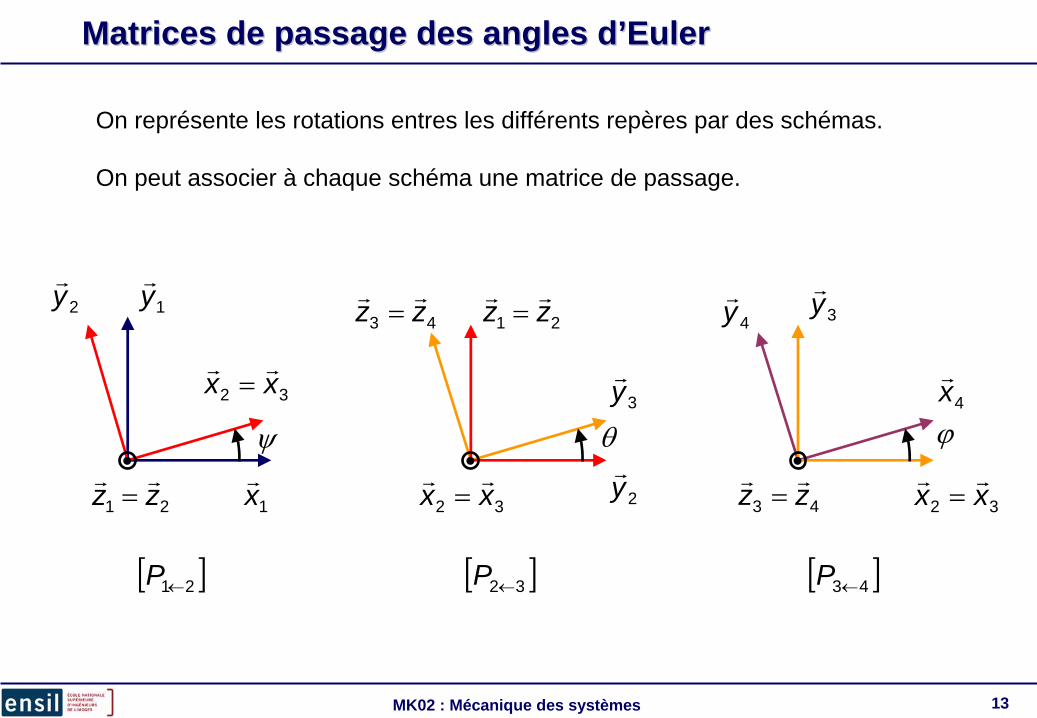
Matrices de passage des angles dMatrices de passage des angles d’’EulerEuler
θ
32 xxrr
= 2yr
3yr
43 zzrr
= 21 zzrr
=
1xr
1yr
32 xxrr
=
2yr
21 zzrr
=
ψ ϕ
43 zzrr
=
3yr
4yr
32 xxrr
=
4xr
[ ]43←P[ ]32←P[ ]21←P
On représente les rotations entres les différents repères par des schémas.
On peut associer à chaque schéma une matrice de passage.
14MK02 : Mécanique des systèmes
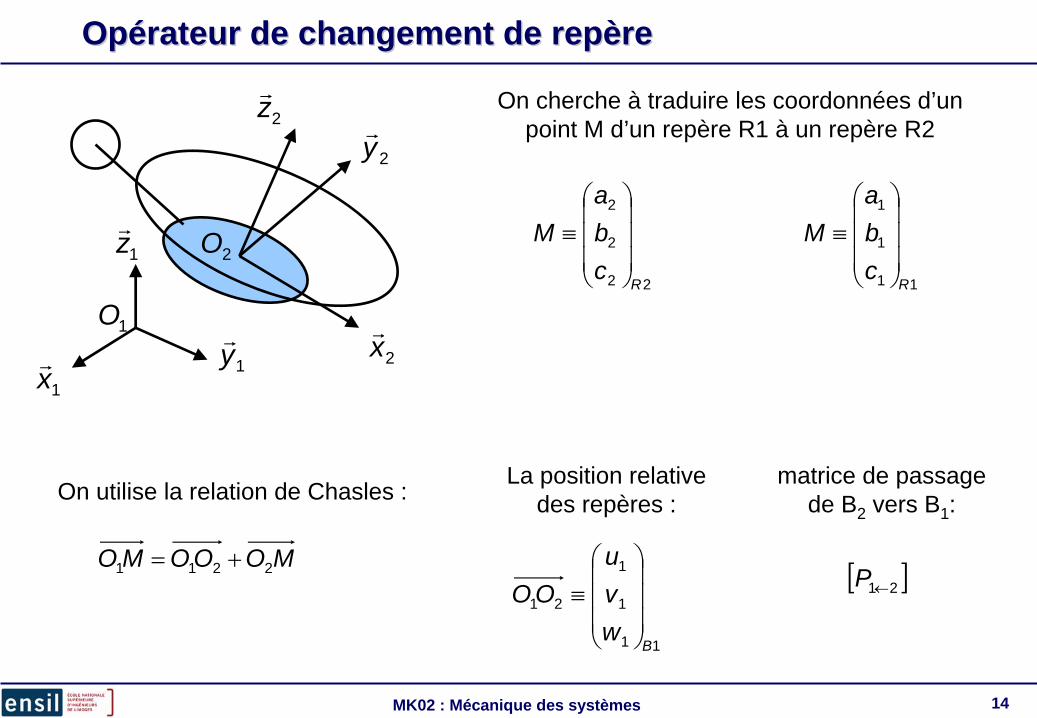
OpOpéérateur de changement de reprateur de changement de repèèrere
1xr 1y
r
1zr
1O2xr
2yr2z
r
2O11
1
1
Rcba
M⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
22
2
2
Rcba
M⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
On cherche à traduire les coordonnées d’un point M d’un repère R1 à un repère R2
11
1
1
21
Bwvu
OO⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
matrice de passage de B2 vers B1:
[ ]21←P
On utilise la relation de Chasles :
MOOOMO 2211 +=
La position relative des repères :
15MK02 : Mécanique des systèmes
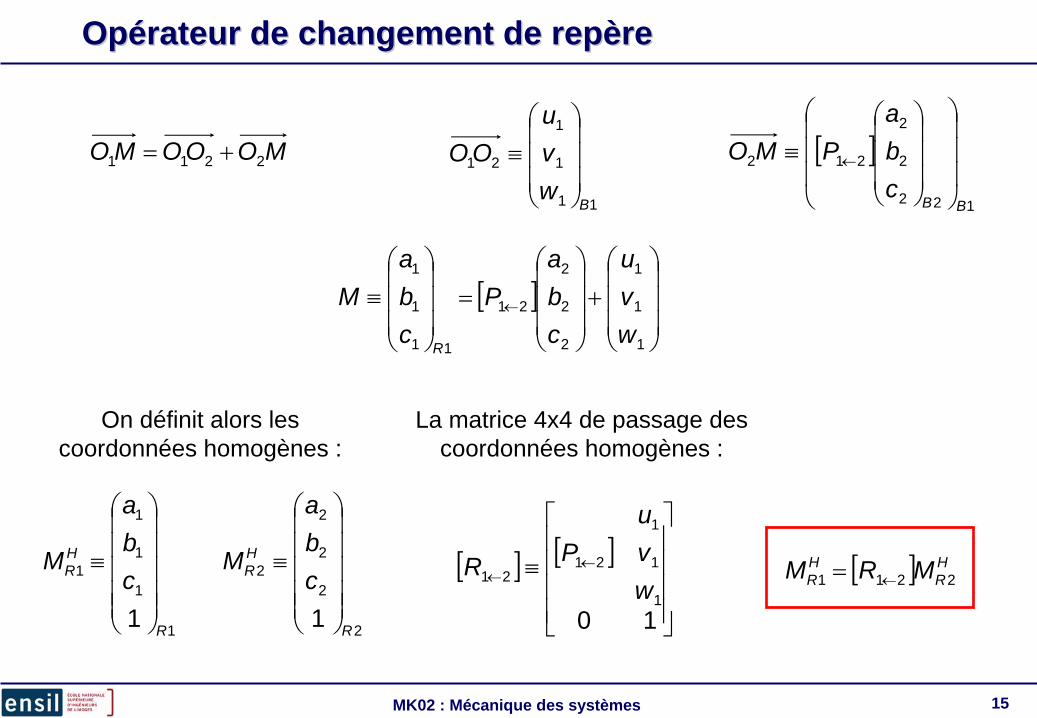
OpOpéérateur de changement de reprateur de changement de repèèrere
[ ]122
2
2
212
BBcba
PMO⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡ ←MOOOMO 2211 +=
11
1
1
21
Bwvu
OO⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
[ ]⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡ ←
1
1
1
2
2
2
21
11
1
1
wvu
cba
Pcba
M
R
1
1
1
1
1
1 R
HR c
ba
M
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
≡
On définit alors les coordonnées homogènes :
2
2
2
2
2
1 R
HR c
ba
M
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
≡
La matrice 4x4 de passage des coordonnées homogènes :
[ ] [ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
≡ ←←
101
1
1
2121
wvu
PR [ ] HR
HR MRM 2211 ←=
16MK02 : Mécanique des systèmes
ModModéélisation des ressortslisation des ressorts
Remarque :Il n’existe pas de matériau indéformable, toute pièce se déforme sous l’effet des actions mécaniques qui s’exercent sur elle.
Définition :
Toute pièce peut être considérée comme un ressort dés l’instant où les déformations dues aux actions extérieures ne sont plus négligeables devant les échelles du système étudié.
Carbone diamant Polystyrène expansé

17MK02 : Mécanique des systèmes
ÉÉlasticitlasticitéé / in/ inéélasticitlasticitéé
Arbre élastique :
Les déformations s’annulent lorsque l’effort s’annule.
4x4 inélastique :
Les déformations persistent lorsque l’effort s’annule.
18MK02 : Mécanique des systèmes
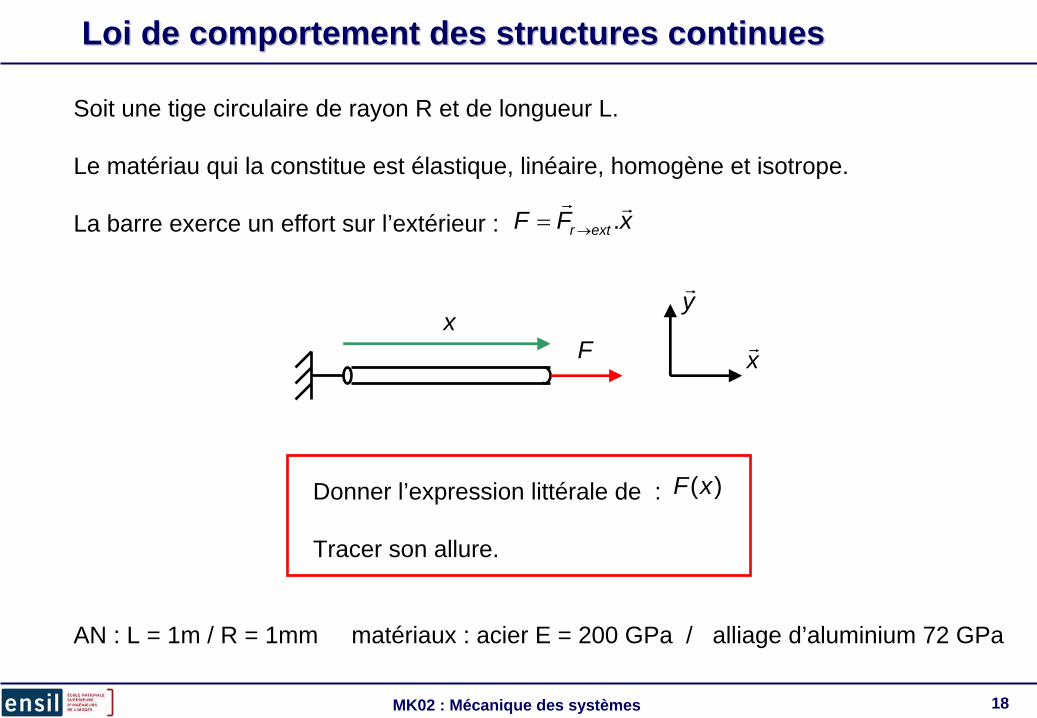
Loi de comportement des structures continuesLoi de comportement des structures continues
Soit une tige circulaire de rayon R et de longueur L.
Le matériau qui la constitue est élastique, linéaire, homogène et isotrope.
La barre exerce un effort sur l’extérieur :
xF
AN : L = 1m / R = 1mm matériaux : acier E = 200 GPa / alliage d’aluminium 72 GPa
xr
yr
xFF extr
rr.→=
Donner l’expression littérale de :
Tracer son allure.
)(xF
19MK02 : Mécanique des systèmes
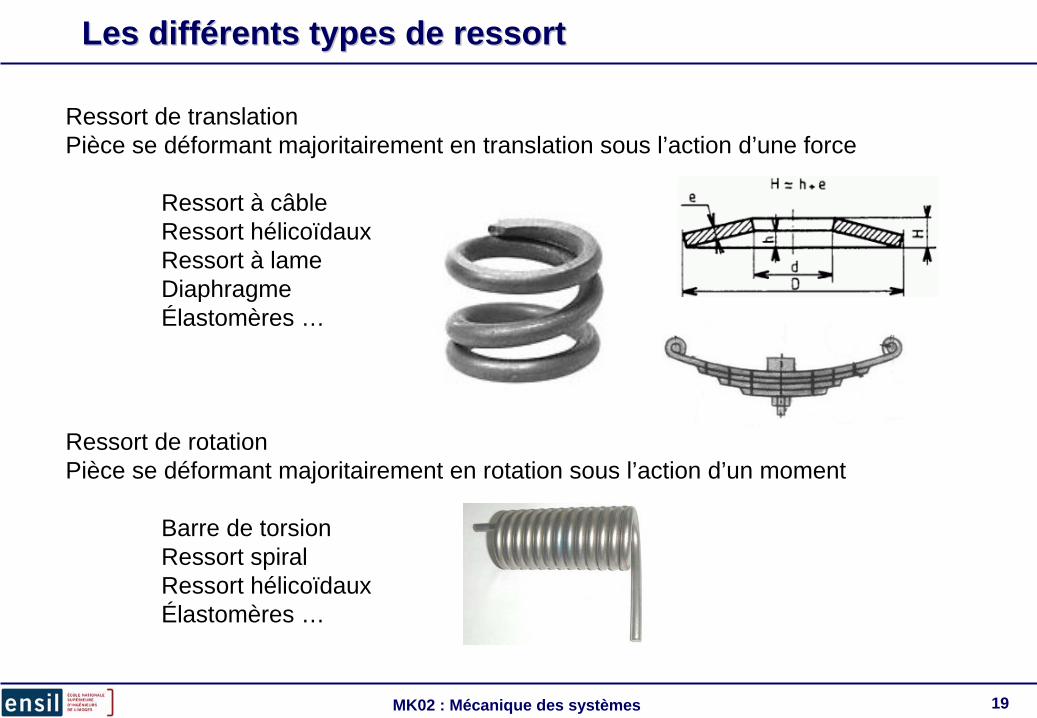
Les diffLes difféérents types de ressort rents types de ressort
Ressort de translationPièce se déformant majoritairement en translation sous l’action d’une force
Ressort à câbleRessort hélicoïdauxRessort à lameDiaphragmeÉlastomères …
Ressort de rotationPièce se déformant majoritairement en rotation sous l’action d’un moment
Barre de torsionRessort spiralRessort hélicoïdauxÉlastomères …
20MK02 : Mécanique des systèmes
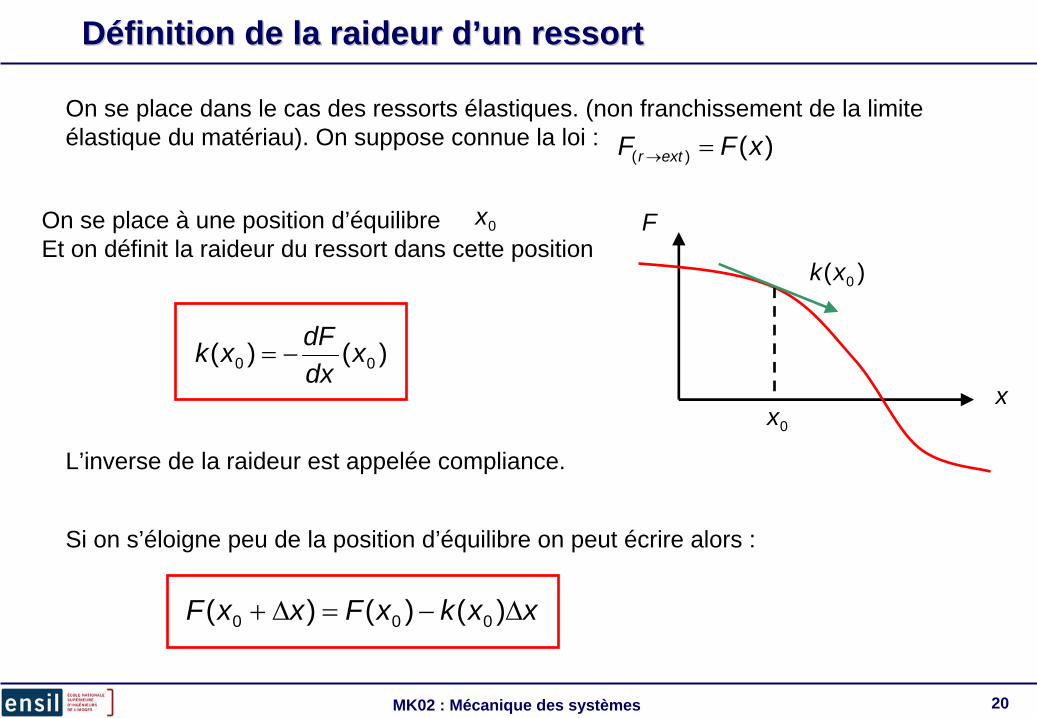
DDééfinition de la raideur dfinition de la raideur d’’un ressortun ressort
On se place dans le cas des ressorts élastiques. (non franchissement de la limite élastique du matériau). On suppose connue la loi :
On se place à une position d’équilibreEt on définit la raideur du ressort dans cette position
)()( 00 xdxdFxk −=
F
x0x
0x
)( 0xk
Si on s’éloigne peu de la position d’équilibre on peut écrire alors :
xxkxFxxF Δ−=Δ+ )()()( 000
L’inverse de la raideur est appelée compliance.
)()( xFF extr =→
21MK02 : Mécanique des systèmes
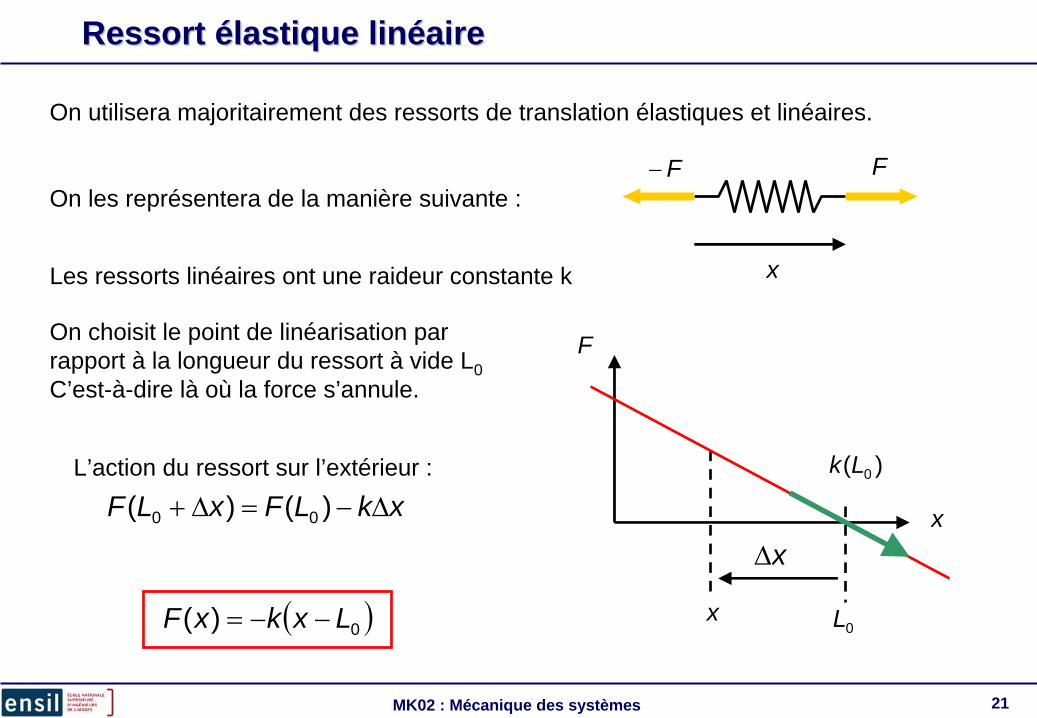
Ressort Ressort éélastique linlastique linééaireaire
Les ressorts linéaires ont une raideur constante k
F
x
x
)( 0Lk
On utilisera majoritairement des ressorts de translation élastiques et linéaires.
On les représentera de la manière suivante :
x
FF−
On choisit le point de linéarisation par rapport à la longueur du ressort à vide L0C’est-à-dire là où la force s’annule.
0L
xkLFxLF Δ−=Δ+ )()( 00
L’action du ressort sur l’extérieur :
( )0)( LxkxF −−=
xΔ
22MK02 : Mécanique des systèmes
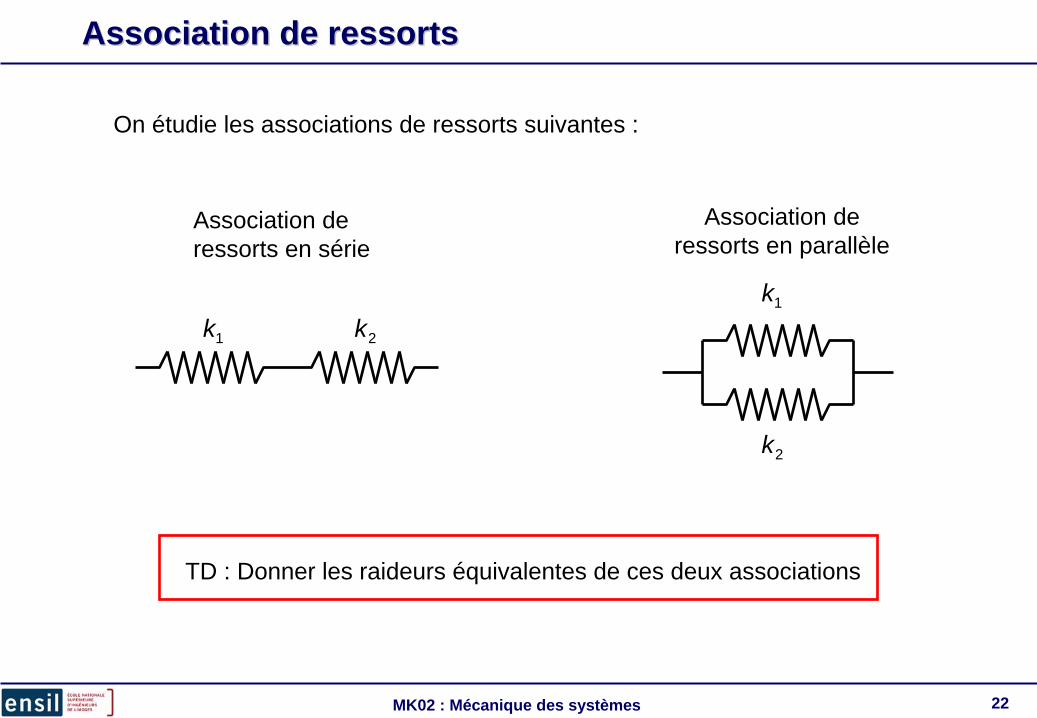
Association de ressortsAssociation de ressorts
TD : Donner les raideurs équivalentes de ces deux associations
1k 2k1k
2k
On étudie les associations de ressorts suivantes :
Association de ressorts en série
Association de ressorts en parallèle
23MK02 : Mécanique des systèmes
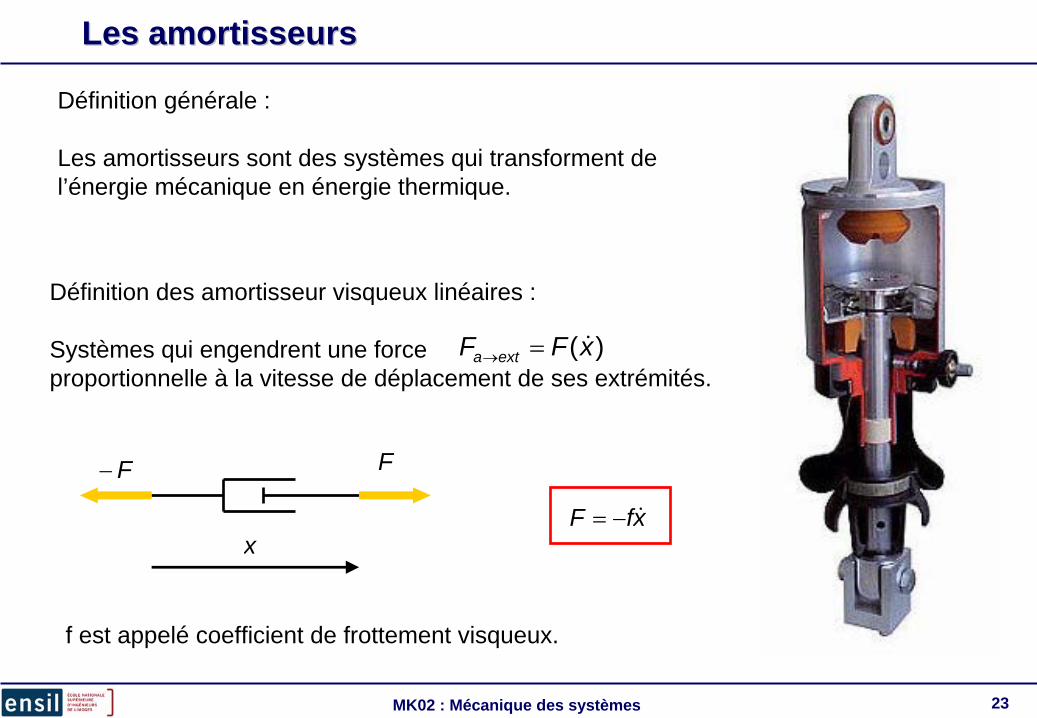
Les amortisseursLes amortisseurs
Définition générale :
Les amortisseurs sont des systèmes qui transforment de l’énergie mécanique en énergie thermique.
Définition des amortisseur visqueux linéaires :
Systèmes qui engendrent une forceproportionnelle à la vitesse de déplacement de ses extrémités.
x
FF−
)(xFF exta &=→
xfF &−=
f est appelé coefficient de frottement visqueux.
24MK02 : Mécanique des systèmes
Plan du coursPlan du cours
1 Modélisation des systèmes mécaniques :Rappels sur les bases, les repères, les coordonnées.Rappels sur les produits scalaire et vectoriel.Paramétrage dans l’espace, matrice de changement de repère.Modélisation de liaisons particulières : ressort, amortisseur, fil,...
2 Cinématique du solide :Vitesse d’un point matériel et dérivation vectorielVitesse d’un point coïncident à un solideMouvements particuliers des solidesCIR, base et roulantesThéorie cinématique des mécanismes
2 Aspect dynamique des systèmes :Masse et centre de masseOpérateur d’inertie d’un solide.Cinétique et dynamique d’un solide.Principe fondamental de la dynamique et applications.Théorie dynamique des mécanismes
25MK02 : Mécanique des systèmes
Elle traite essentiellement de
Des points matériels P
Position :
Vitesse :
Accélération :
CinCinéématiquematique
La cinématique est la science du mouvement.
A ne pas confondre avec la Cinétique qui est la science de la quantité de mouvement…
OP
0/PV
0/Pγ
Des solides S
Vitesse de rotation :
Vitesse de points coïncidents :
0/SΩ
Par rapport à un repère de référence 0.
0/SMV ∈
26MK02 : Mécanique des systèmes
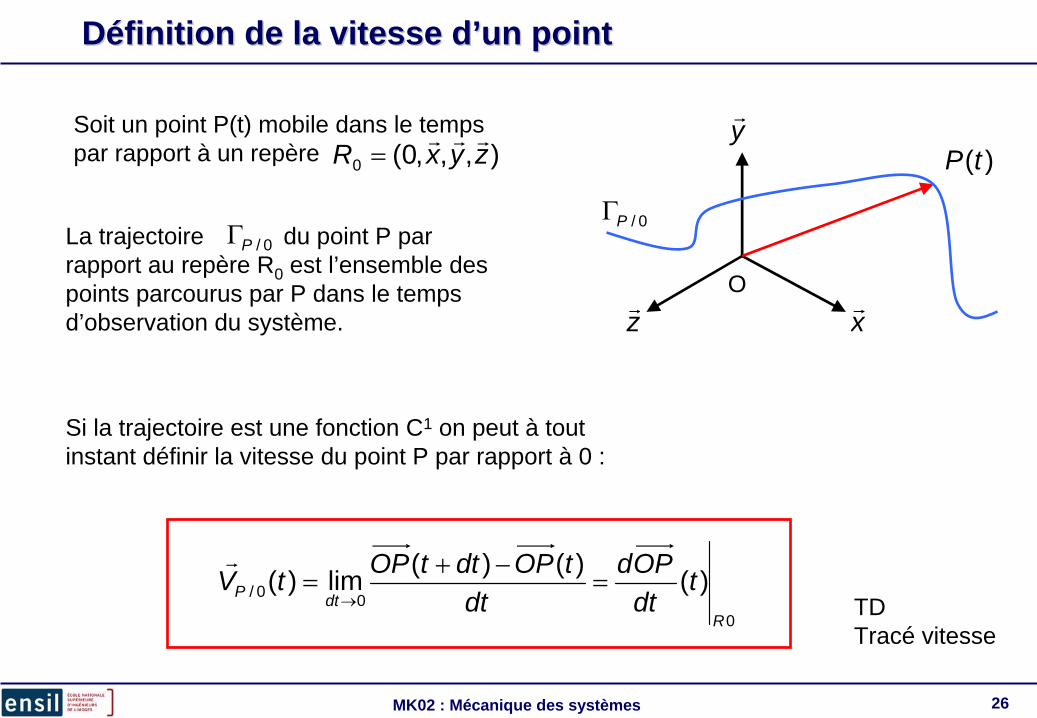
DDééfinition de la vitesse dfinition de la vitesse d’’un pointun point
xr
yr
zr
O
0/PΓ
)(tPSoit un point P(t) mobile dans le temps par rapport à un repère ),,,0(0 zyxR
rrr=
La trajectoire du point P par rapport au repère R0 est l’ensemble des points parcourus par P dans le temps d’observation du système.
0/PΓ
Si la trajectoire est une fonction C1 on peut à tout instant définir la vitesse du point P par rapport à 0 :
000/ )()()(lim)(
RdtP t
dtOPd
dttOPdttOPtV =
−+=
→
r
TDTracé vitesse
27MK02 : Mécanique des systèmes
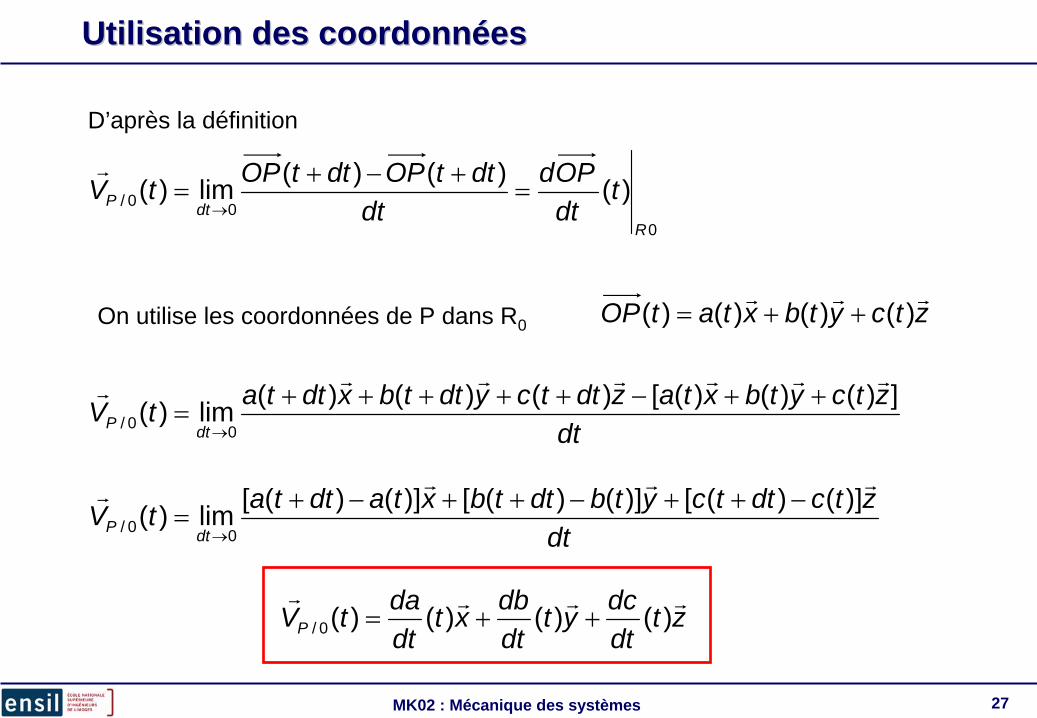
Utilisation des coordonnUtilisation des coordonnééeses
000/ )()()(lim)(
RdtP t
dtOPd
dtdttOPdttOPtV =
+−+=
→
r
ztcytbxtatOPrrr
)()()()( ++=
D’après la définition
On utilise les coordonnées de P dans R0
dtztcytbxtazdttcydttbxdttatV
dtP])()()([)()()(lim)(
00/
rrrrrrr ++−+++++=
→
dtztcdttcytbdttbxtadttatV
dtP
rrrr )]()([)]()([)]()([lim)(00/
−++−++−+=
→
ztdtdcyt
dtdbxt
dtdatVP
rrrr)()()()(0/ ++=
28MK02 : Mécanique des systèmes
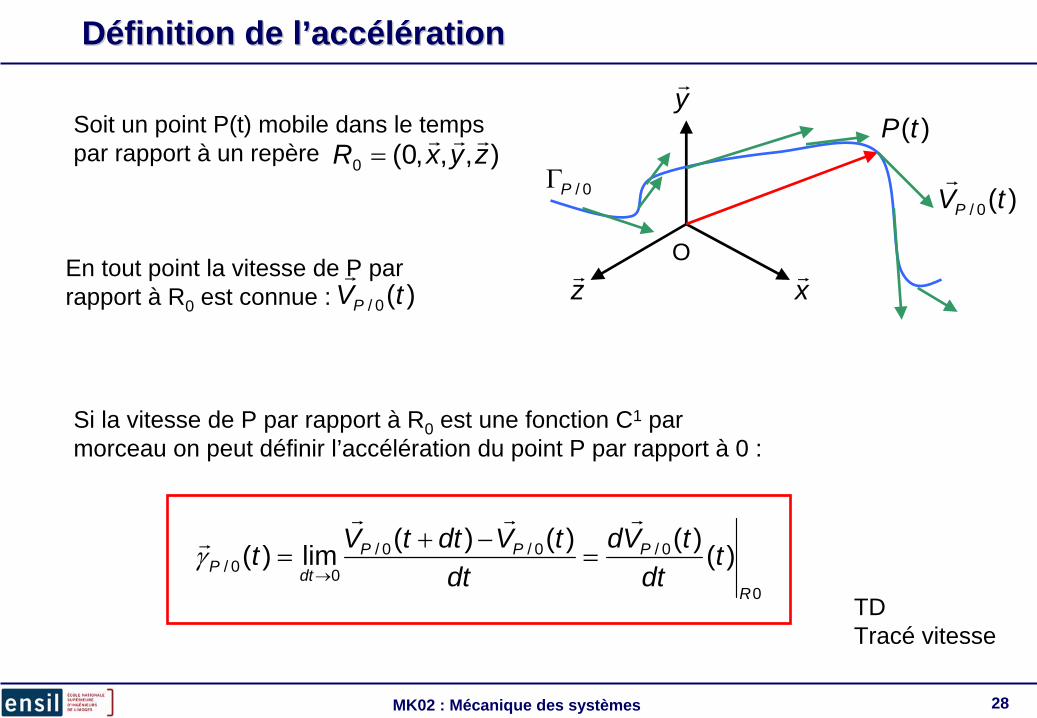
DDééfinition de lfinition de l’’accaccéélléérationration
xr
yr
zr
O
0/PΓ
)(tPSoit un point P(t) mobile dans le temps par rapport à un repère ),,,0(0 zyxR
rrr=
Si la vitesse de P par rapport à R0 est une fonction C1 par morceau on peut définir l’accélération du point P par rapport à 0 :
0
0/0/0/00/ )()()()(lim)(
R
PPPdtP t
dttVd
dttVdttVt
rrrr
=−+
=→
γ
En tout point la vitesse de P par rapport à R0 est connue :
)(0/ tVP
r
)(0/ tVP
r
TDTracé vitesse
29MK02 : Mécanique des systèmes
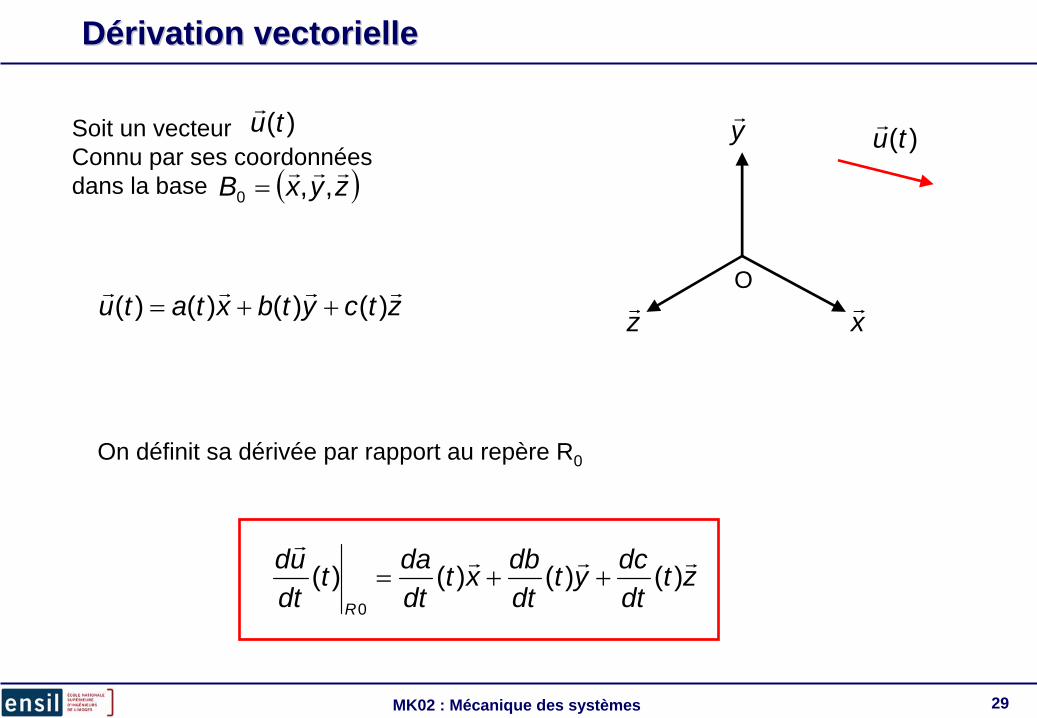
DDéérivation vectoriellerivation vectorielle
xr
yr
zr
)(turSoit un vecteur
Connu par ses coordonnées dans la base
)(tur
( )zyxBrrr
,,0 =
ztcytbxtaturrrr
)()()()( ++=
On définit sa dérivée par rapport au repère R0
ztdtdcyt
dtdbxt
dtdat
dtud
R
rrrr
)()()()(0
++=
O
30MK02 : Mécanique des systèmes
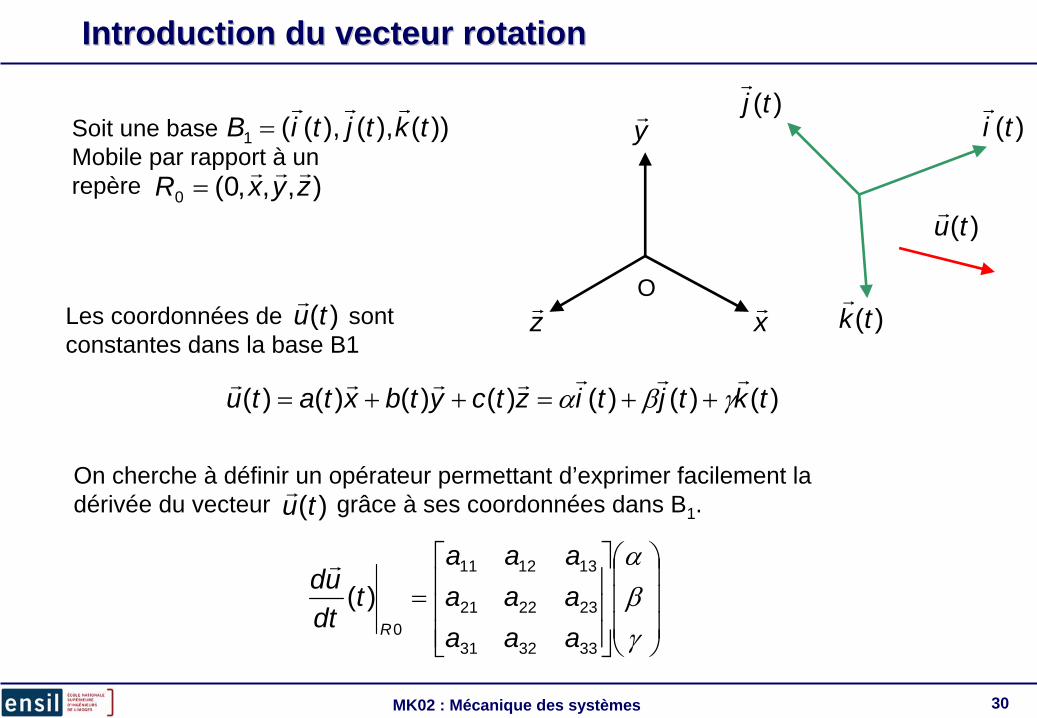
Introduction du vecteur rotationIntroduction du vecteur rotation
xr
yr
zr
)(tir)(tj
r
)(tkrO
Soit une base Mobile par rapport à unrepère ),,,0(0 zyxR
rrr=
))(),(),((1 tktjtiBrrr
=
On cherche à définir un opérateur permettant d’exprimer facilement ladérivée du vecteur grâce à ses coordonnées dans B1.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
γβα
333231
232221
131211
0
)(aaaaaaaaa
tdtud
R
r
)(tur
)()()()()()()( tktjtiztcytbxtaturrrrrrr
γβα ++=++=
Les coordonnées de sont constantes dans la base B1
)(tur
)(tur
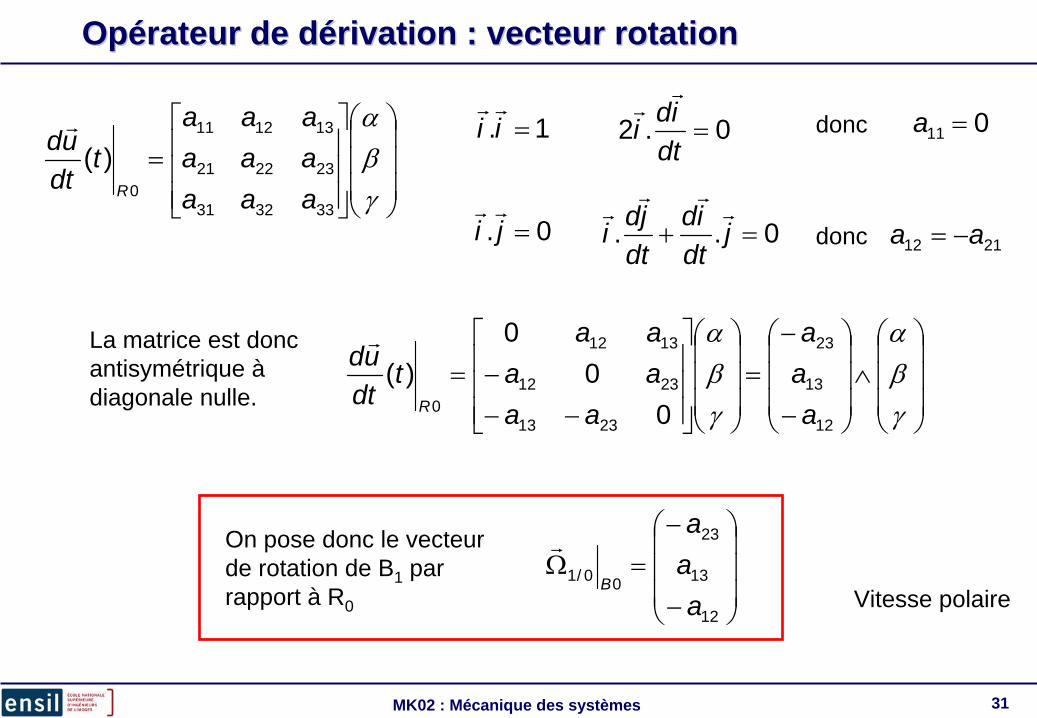
31MK02 : Mécanique des systèmes
OpOpéérateur de drateur de déérivation : vecteur rotationrivation : vecteur rotation
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
γβα
333231
232221
131211
0
)(aaaaaaaaa
tdtud
R
r 1. =iirr
0.2 =dtidir
rdonc 011 =a
0. =jirr
0.. =+ jdtid
dtjdi
rrr
rdonc 2112 aa −=
La matrice est donc antisymétrique àdiagonale nulle. ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛∧
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
γβα
γβα
12
13
23
2313
2312
1312
0 00
0)(
aaa
aaaaaa
tdtud
R
r
On pose donc le vecteur de rotation de B1 par rapport à R0 ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−=Ω
12
13
23
00/1
aaa
B
r
Vitesse polaire
32MK02 : Mécanique des systèmes
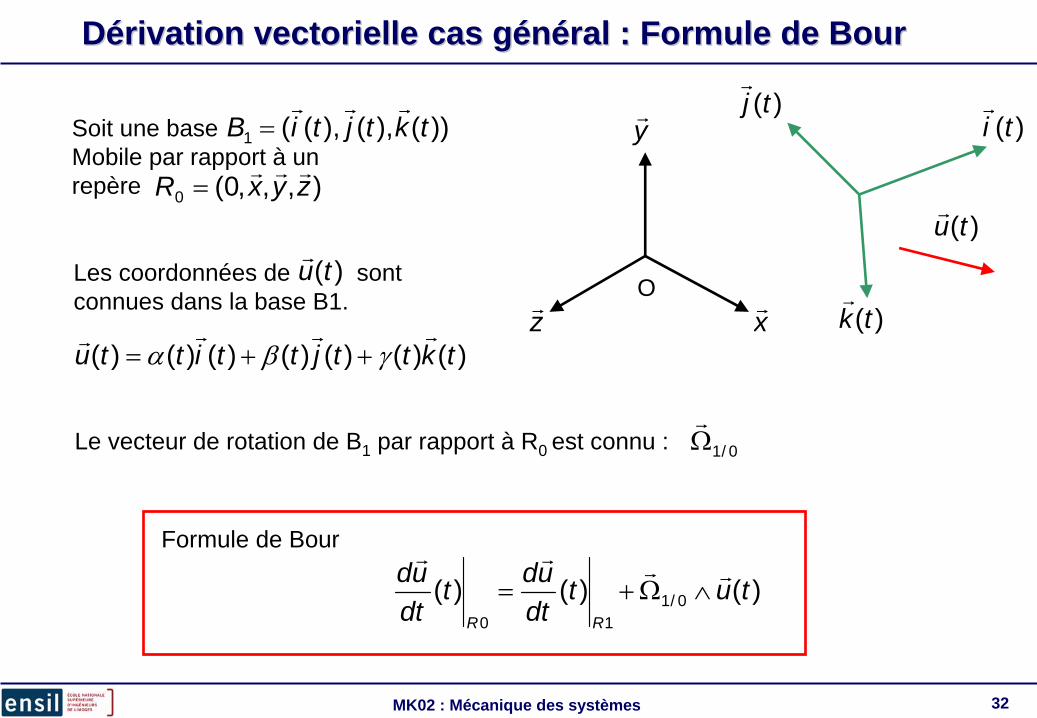
DDéérivation vectorielle cas grivation vectorielle cas géénnééral : Formule de ral : Formule de BourBour
xr
yr
zr
)(tir)(tj
r
)(tkrO
Soit une base Mobile par rapport à unrepère ),,,0(0 zyxR
rrr=
))(),(),((1 tktjtiBrrr
=
)(tur
)()()()()()()( tkttjttitturrrr
γβα ++=
Les coordonnées de sont connues dans la base B1.
)(tur
Formule de Bour
)()()( 0/110
tutdtudt
dtud
RR
rrrr
∧Ω+=
0/1Ωr
Le vecteur de rotation de B1 par rapport à R0 est connu :
33MK02 : Mécanique des systèmes
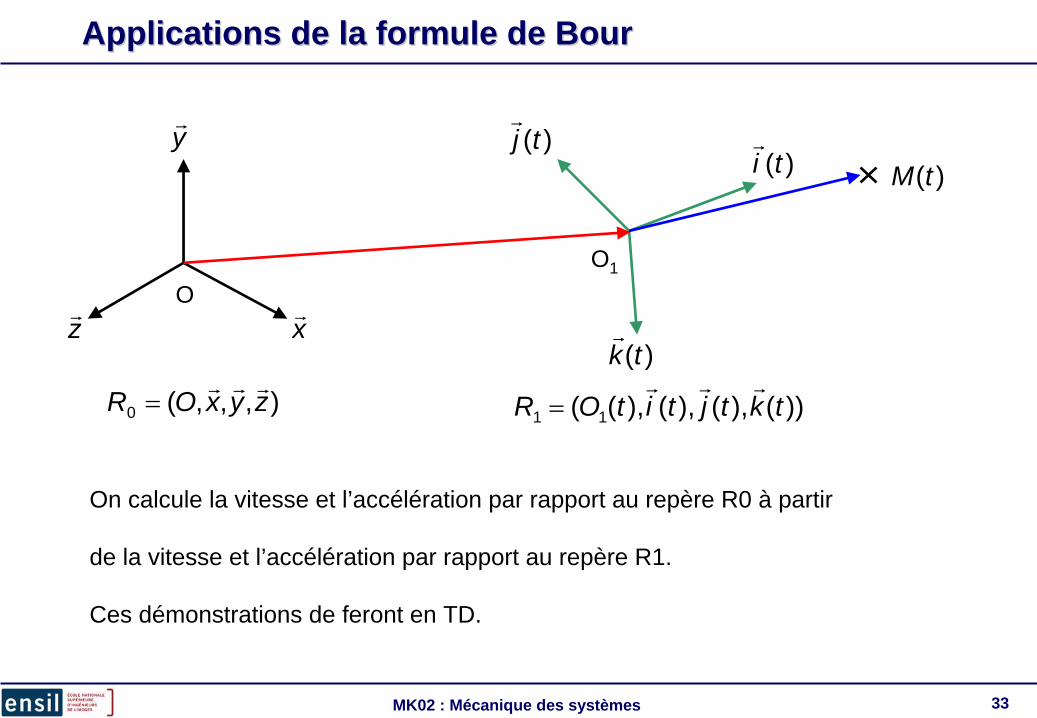
Applications de la formule de Applications de la formule de BourBour
xr
yr
zr
)(tir)(tj
r
)(tkr
O
)(tM
O1
),,,(0 zyxORrrr
= ))(),(),(),(( 11 tktjtitORrrr
=
On calcule la vitesse et l’accélération par rapport au repère R0 à partir
de la vitesse et l’accélération par rapport au repère R1.
Ces démonstrations de feront en TD.
34MK02 : Mécanique des systèmes
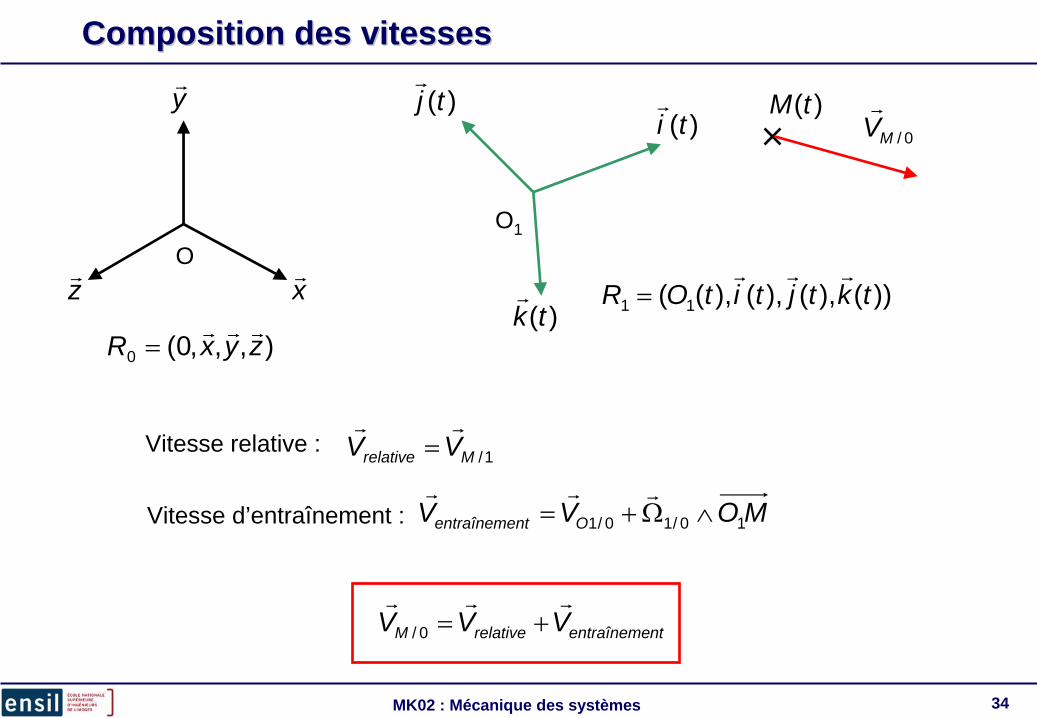
Composition des vitessesComposition des vitesses
Vitesse relative :
xr
yr
zr
)(tir)(tj
r
)(tkr
O
)(tM
O1
),,,0(0 zyxRrrr
=
))(),(),(),(( 11 tktjtitORrrr
=
1/Mrelative VVrr
=
Vitesse d’entraînement : MOVV Ontentraîneme 10/10/1 ∧Ω+=rrr
ntentraînemerelativeM VVVrrr
+=0/
0/MVr
35MK02 : Mécanique des systèmes
Composition des accComposition des accéélléérationsrations
Accélération relative : 1/Mrelative γγrr
=
Accélération d’entraînement : [ ]MOMOdt
dOntentraîneme 10/10/11
0/10/1 ∧Ω∧Ω+∧
Ω+=
rrr
rrγγ
CoriolisntentraînemerelativeM γγγγrrrr
++=0/
Accélération de Coriolis : 1/0/12 MCoriolis Vrrr
∧Ω=γ
Gaspard Coriolis1792 - 1843
36MK02 : Mécanique des systèmes
DDééfinition dfinition d’’un solideun solide
En mécanique, on appelle solide un corps qui vérifie :
0=dt
ABd
Quels que soient A et B deux points quelconques appartenant au solide.
Corollaire :Il est toujours possible (et souvent pratique) d’associer un repère à un solide.
37MK02 : Mécanique des systèmes
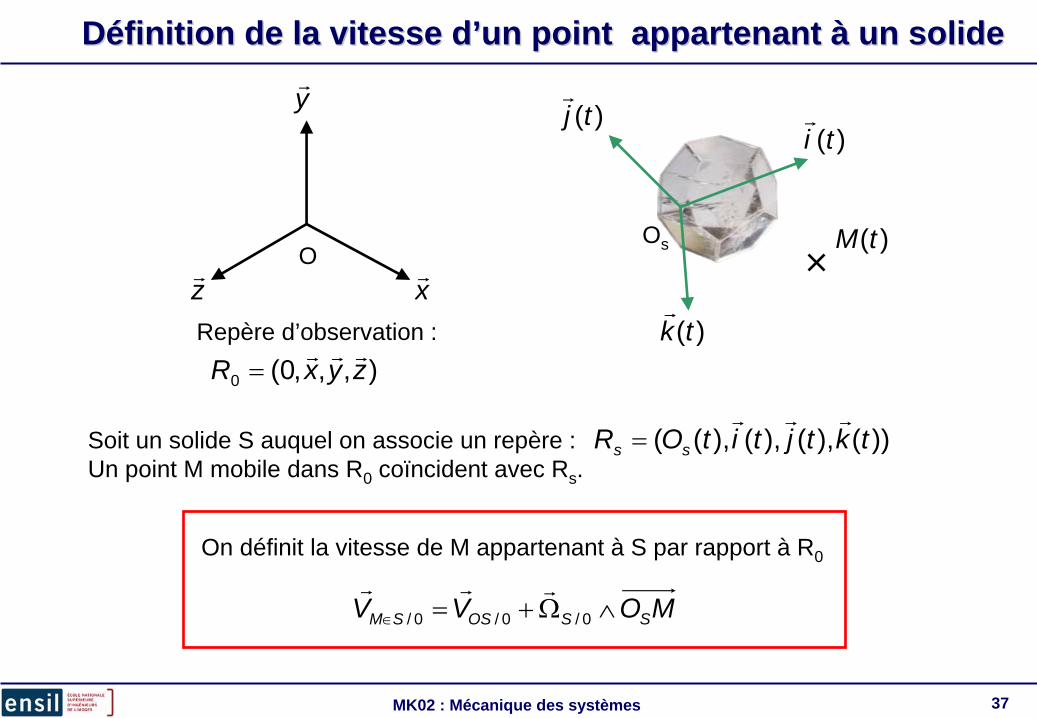
DDééfinition de la vitesse dfinition de la vitesse d’’un point appartenant un point appartenant àà un solideun solide
xr
yr
zr
)(tir)(tj
r
)(tkr
O)(tMOs
),,,0(0 zyxRrrr
=
Soit un solide S auquel on associe un repère :Un point M mobile dans R0 coïncident avec Rs.
))(),(),(),(( tktjtitOR ss
rrr=
Repère d’observation :
MOVV SSOSSM ∧Ω+=∈ 0/0/0/
rrr
On définit la vitesse de M appartenant à S par rapport à R0
38MK02 : Mécanique des systèmes
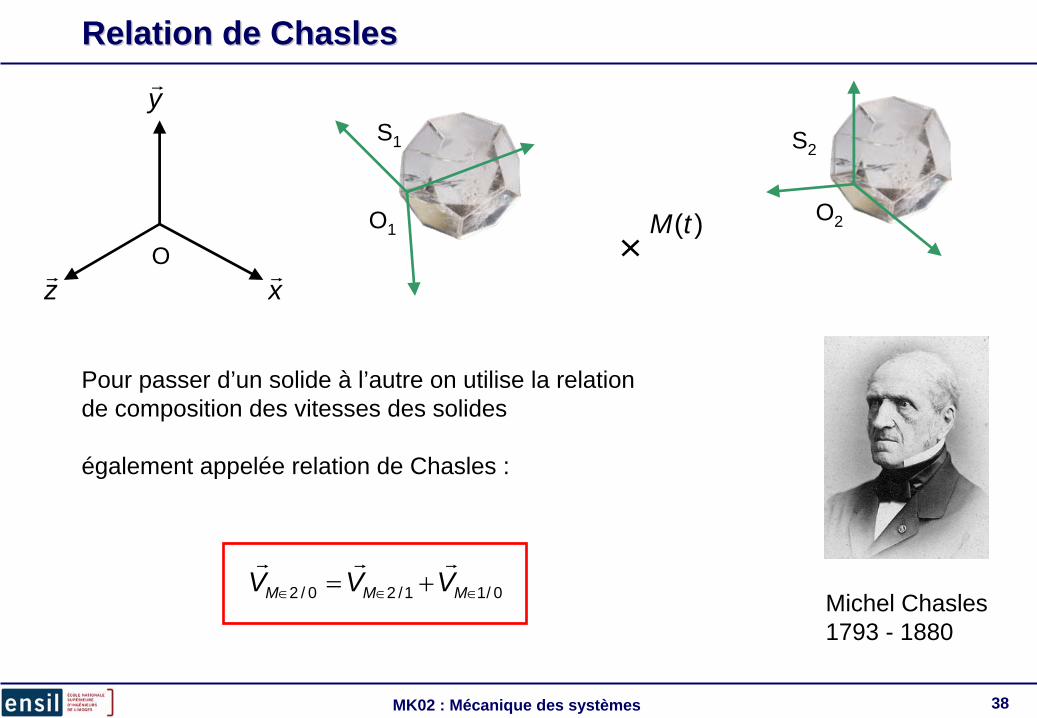
Relation de ChaslesRelation de Chasles
xr
yr
zr
O)(tMO1
S1
O2
S2
Pour passer d’un solide à l’autre on utilise la relation de composition des vitesses des solides
également appelée relation de Chasles :
0/11/20/2 ∈∈∈ += MMM VVVrrr
Michel Chasles1793 - 1880
39MK02 : Mécanique des systèmes
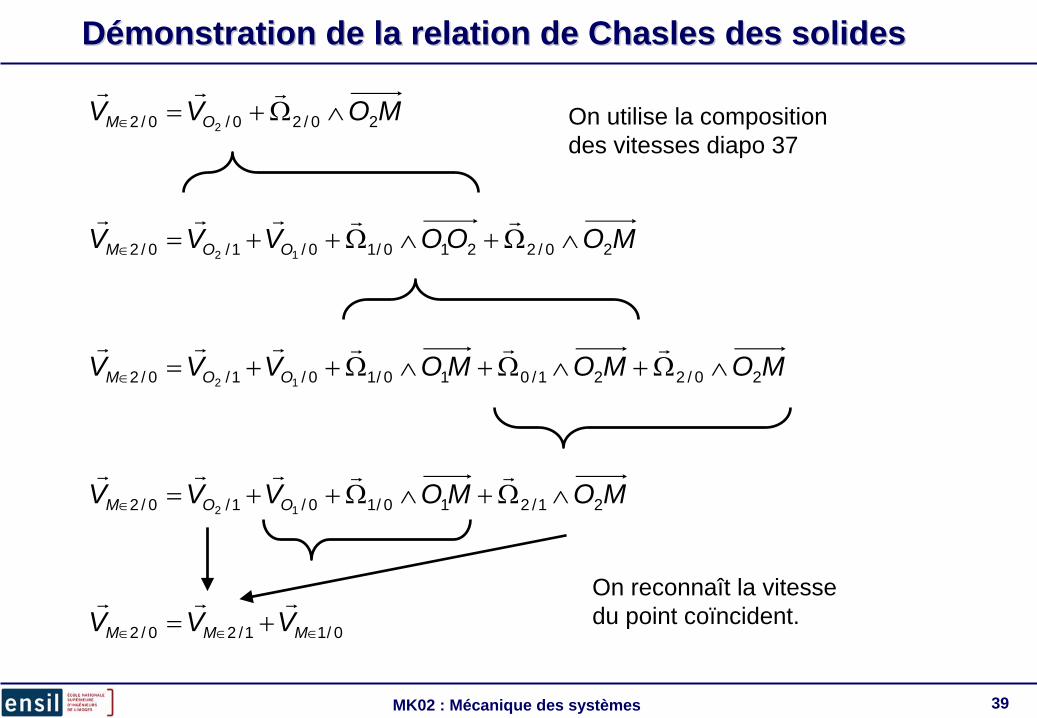
DDéémonstration de la relation de Chasles des solidesmonstration de la relation de Chasles des solides
MOVV OM 20/20/0/2 2∧Ω+=∈
rrr
MOOOVVV OOM 20/2210/10/1/0/2 12∧Ω+∧Ω++=∈
rrrrr
MOMOMOVVV OOM 20/221/010/10/1/0/2 12∧Ω+∧Ω+∧Ω++=∈
rrrrrr
MOMOVVV OOM 21/210/10/1/0/2 12∧Ω+∧Ω++=∈
rrrrr
0/11/20/2 ∈∈∈ += MMM VVVrrr
On utilise la composition des vitesses diapo 37
On reconnaît la vitesse du point coïncident.
40MK02 : Mécanique des systèmes
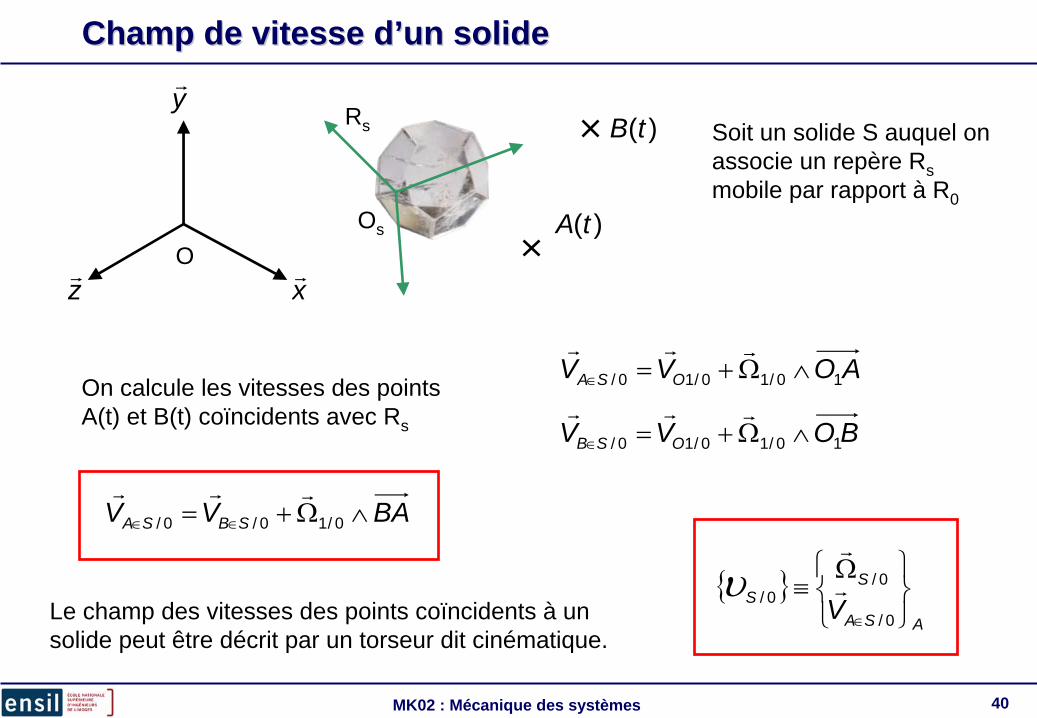
Champ de vitesse dChamp de vitesse d’’un solideun solide
xr
yr
zr
O)(tAOs
)(tB
AOVV OSA 10/10/10/ ∧Ω+=∈
rrr
On calcule les vitesses des points A(t) et B(t) coïncidents avec Rs
Soit un solide S auquel on associe un repère Rsmobile par rapport à R0
Rs
BOVV OSB 10/10/10/ ∧Ω+=∈
rrr
BAVV SBSA ∧Ω+= ∈∈ 0/10/0/
rrr
Le champ des vitesses des points coïncidents à un solide peut être décrit par un torseur dit cinématique.
{ }ASA
SS V ⎭
⎬⎫
⎩⎨⎧ Ω
≡∈ 0/
0/0/ r
r
υ
41MK02 : Mécanique des systèmes
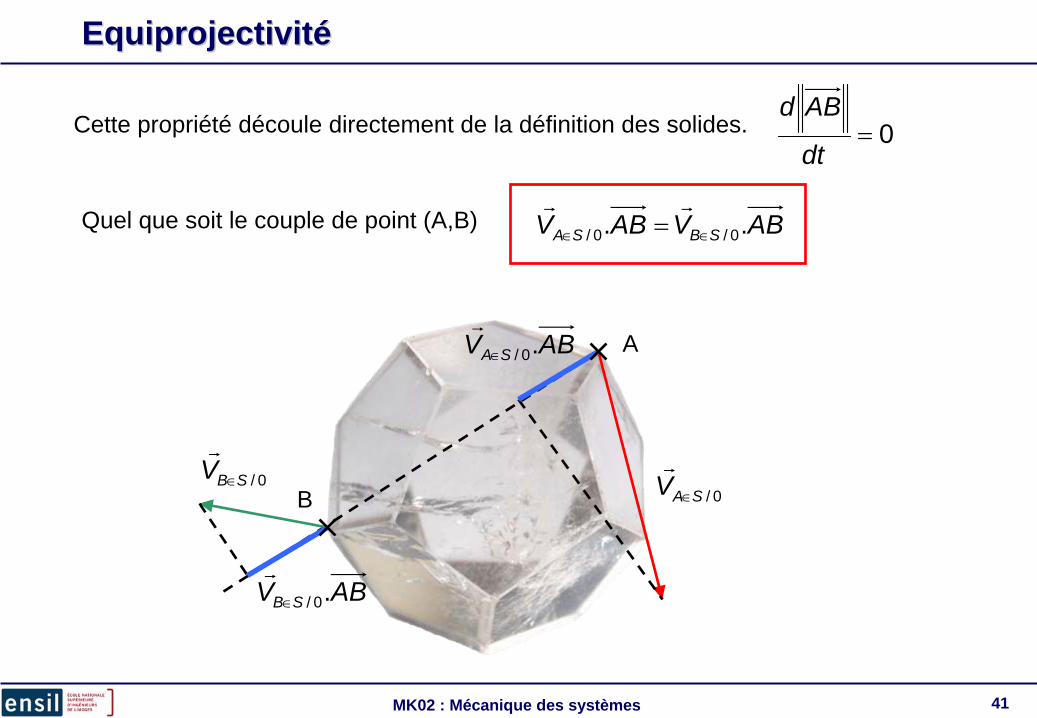
EquiprojectivitEquiprojectivitéé
Cette propriété découle directement de la définition des solides. 0=dt
ABd
ABVABV SBSA .. 0/0/ ∈∈ =rr
Quel que soit le couple de point (A,B)
0/SAV ∈
r
A
B
ABV SA .0/∈
r
0/SBV ∈
r
ABV SB .0/∈
r

42MK02 : Mécanique des systèmes
Mouvements particuliers des solidesMouvements particuliers des solides
Rotation
{ }O
S⎭⎬⎫
⎩⎨⎧Ω
≡0
0/10/ r
r
υ
Il existe un point O /
Mouvement planTranslation
Il existe un point A /
0. 0/0/1 =Ω ∈SAVrr00/1
rr=Ω
43MK02 : Mécanique des systèmes
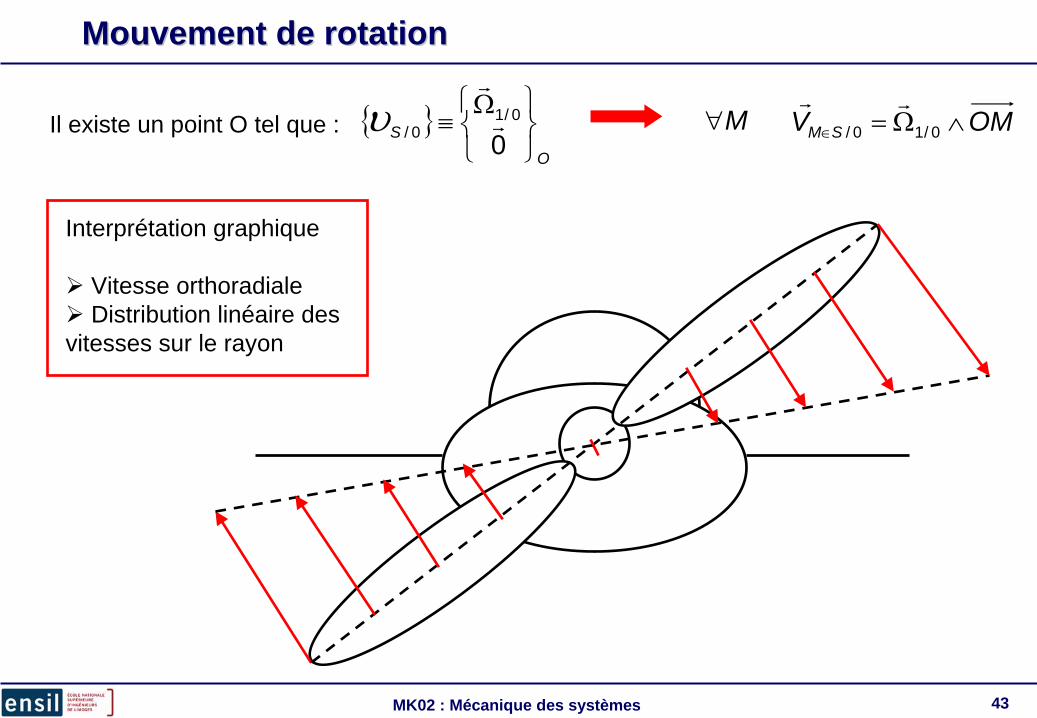
Mouvement de rotationMouvement de rotation
{ }O
S⎭⎬⎫
⎩⎨⎧Ω
≡0
0/10/ r
r
υIl existe un point O tel que : OMV SM ∧Ω=∈ 0/10/
rr
Interprétation graphique
Vitesse orthoradialeDistribution linéaire des
vitesses sur le rayon
M∀

44MK02 : Mécanique des systèmes
Mouvement de translationMouvement de translation
00/1
rr=Ω M∀ 0/0/ SASM VV ∈∈ =
rr
Interprétation graphique
Les vitesses de l’ensembledes points coïncidents avec S sont toutes identiques.
A

45MK02 : Mécanique des systèmes
Mouvement planMouvement plan
Il existe un point A / 0. 0/0/ =Ω ∈SAS Vrr
Les vecteurs vitesses sont coplanaires à un plan de normale
].[. 0/0/0/0/0/ ABVV SSASSBS ∧Ω+Ω=Ω ∈∈
rrrrr
0/1Ωr
0/1Ωr
46MK02 : Mécanique des systèmes
Vitesse de glissement et roulement sans glissementVitesse de glissement et roulement sans glissement
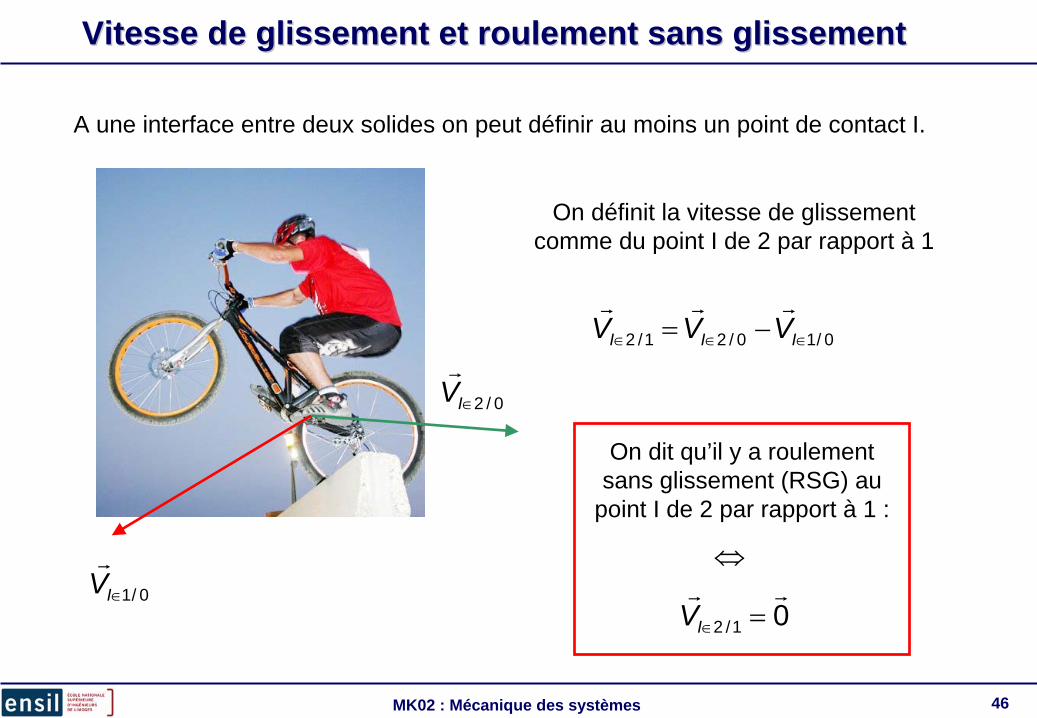
A une interface entre deux solides on peut définir au moins un point de contact I.
0/1∈IVr
0/2∈IVr
On définit la vitesse de glissement comme du point I de 2 par rapport à 1
0/10/21/2 ∈∈∈ −= III VVVrrr
On dit qu’il y a roulement sans glissement (RSG) au
point I de 2 par rapport à 1 :
01/2
rr=∈IV
⇔
47MK02 : Mécanique des systèmes
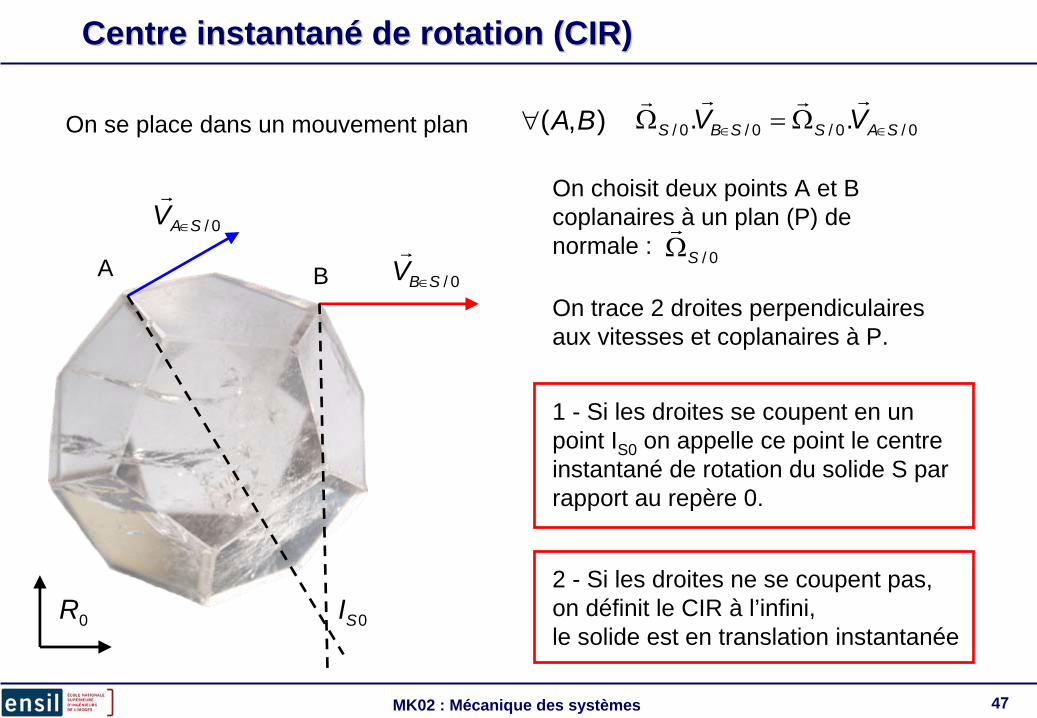
Centre instantanCentre instantanéé de rotation (CIR)de rotation (CIR)
On se place dans un mouvement plan 0/0/0/0/ .. SASSBS VV ∈∈ Ω=Ωrrrr
),( BA∀
A B 0/SBV ∈
r0/SAV ∈
r On choisit deux points A et B coplanaires à un plan (P) de normale : 0/SΩ
r
On trace 2 droites perpendiculaires aux vitesses et coplanaires à P.
0R2 - Si les droites ne se coupent pas, on définit le CIR à l’infini, le solide est en translation instantanée
1 - Si les droites se coupent en un point IS0 on appelle ce point le centre instantané de rotation du solide S par rapport au repère 0.
0SI
48MK02 : Mécanique des systèmes
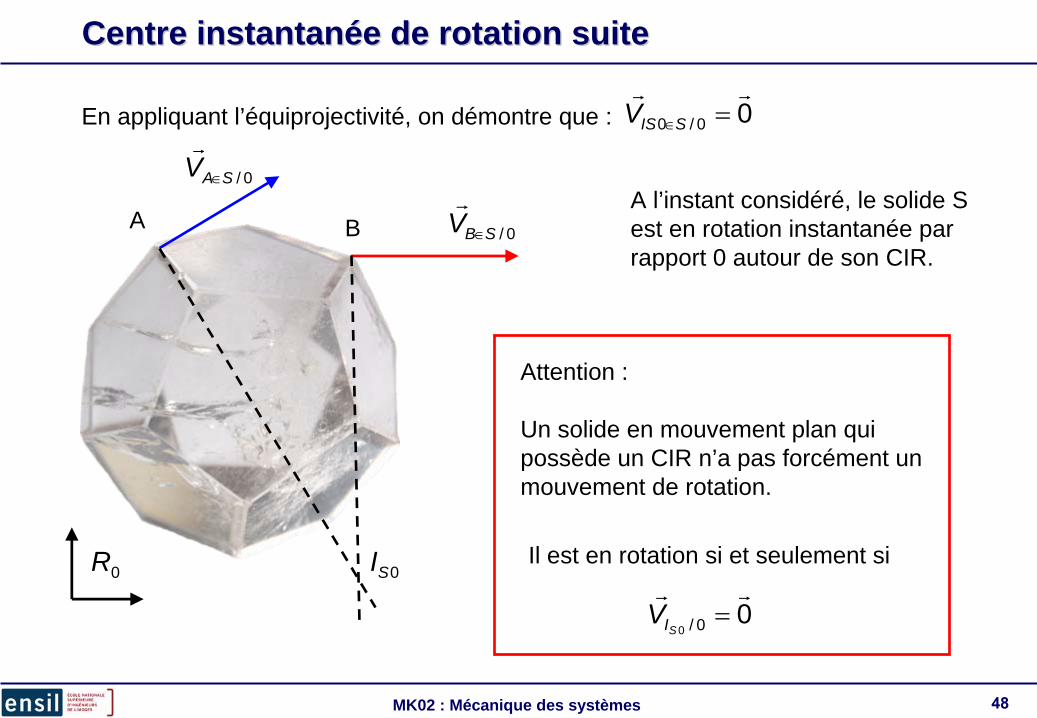
Centre instantanCentre instantanéée de rotation suitee de rotation suite
A B 0/SBV ∈
r0/SAV ∈
r
0R 0SI
En appliquant l’équiprojectivité, on démontre que : 00/0
rr=∈SISV
A l’instant considéré, le solide S est en rotation instantanée par rapport 0 autour de son CIR.
Attention :
Un solide en mouvement plan qui possède un CIR n’a pas forcément un mouvement de rotation.
Il est en rotation si et seulement si
00/0
rr=
SIV
49MK02 : Mécanique des systèmes
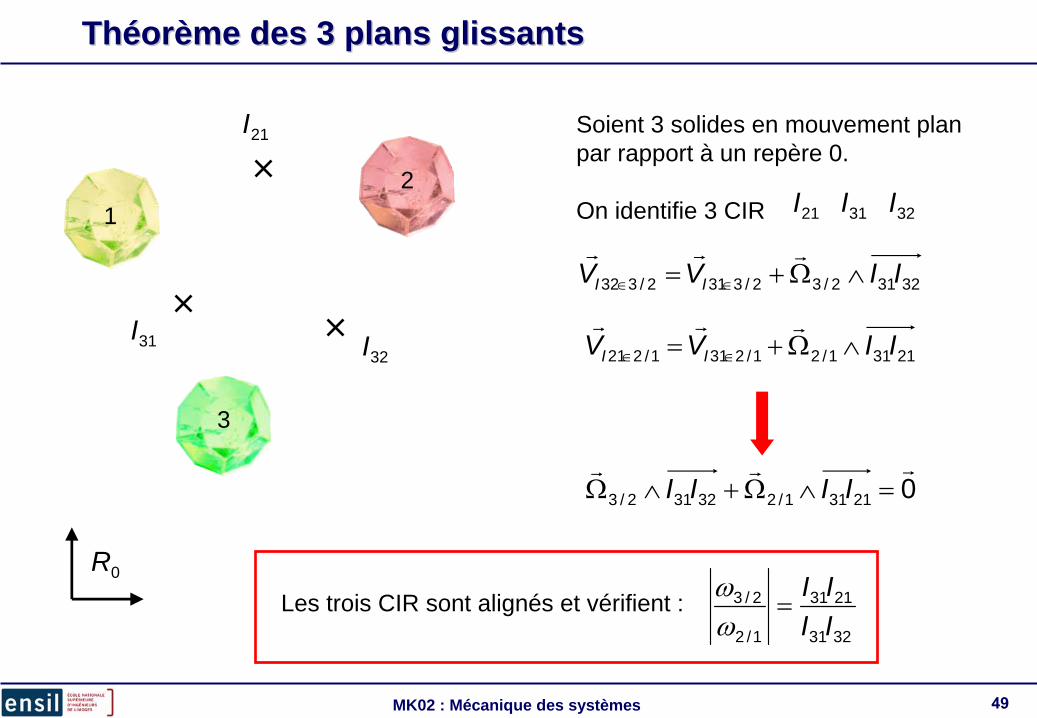
ThThééororèème des 3 plans glissantsme des 3 plans glissants
12
3
Soient 3 solides en mouvement plan par rapport à un repère 0.
On identifie 3 CIR
0R
31I
21I
32I
21I 31I 32I
32312/32/3312/332 IIVV II ∧Ω+= ∈∈
rrr
21311/21/2311/221 IIVV II ∧Ω+= ∈∈
rrr
021311/232312/3
rrr=∧Ω+∧Ω IIII
Les trois CIR sont alignés et vérifient :3231
2131
1/2
2/3
IIII
=ωω

50MK02 : Mécanique des systèmes
Base et RoulanteBase et Roulante
Dans certaines applications particulières (came, cinématiques complexes) il est commode de définir 2 courbes relatives à un mouvement plan 2/1. On identifie les trajectoires d’un CIR.
12
21ILa trajectoire de I21par rapport à 2 est appelé la roulante.
La trajectoire de I21par rapport à 1 est
appelé la base.
Remarque : La base et la roulante roulent sans glisser l’une sur l’autre sur le CIR.
51MK02 : Mécanique des systèmes
Analyse cinAnalyse cinéématique des mmatique des méécanismescanismes
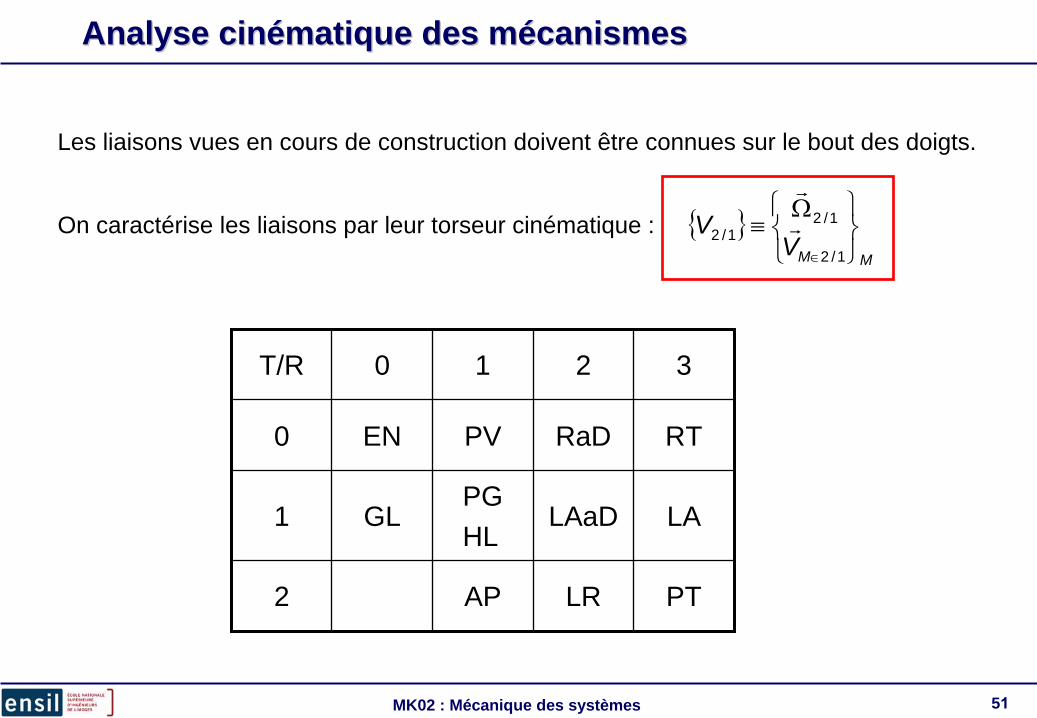
Les liaisons vues en cours de construction doivent être connues sur le bout des doigts.
PTLRAP2
LALAaDPGHL
GL1
RTRaDPVEN0
3210T/R
On caractérise les liaisons par leur torseur cinématique : { }MMV
V⎭⎬⎫
⎩⎨⎧ Ω
≡∈ 1/2
1/21/2 r
r
52MK02 : Mécanique des systèmes
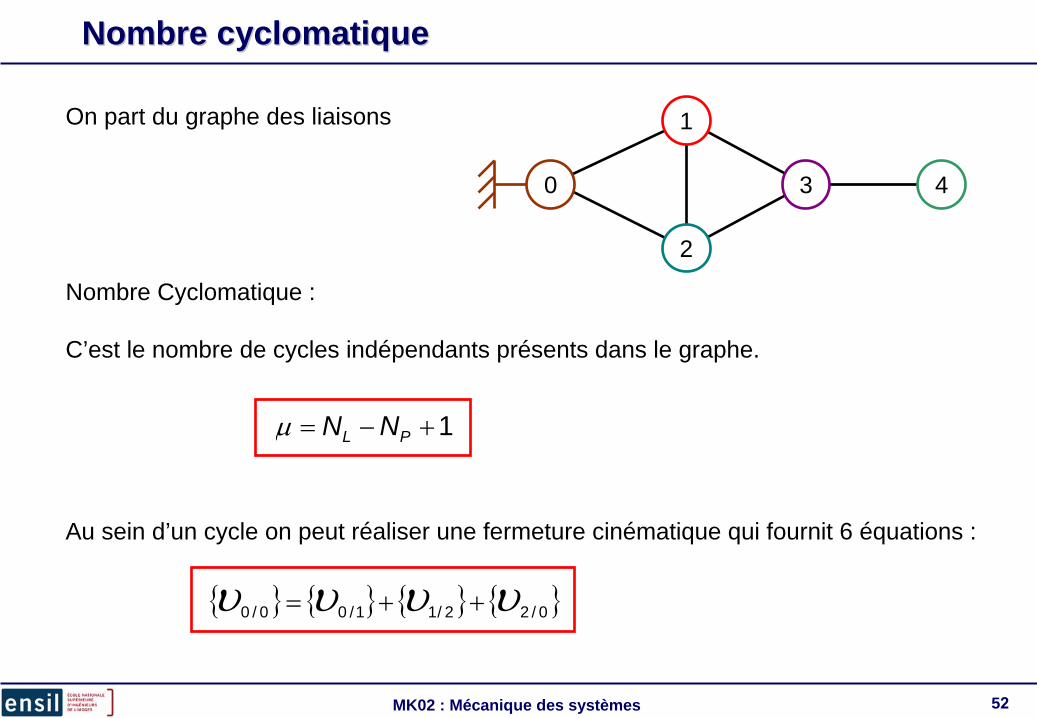
Nombre Nombre cyclomatiquecyclomatique
0
1
3 4
2
On part du graphe des liaisons
Nombre Cyclomatique :
C’est le nombre de cycles indépendants présents dans le graphe.
1+−= PL NNμ
Au sein d’un cycle on peut réaliser une fermeture cinématique qui fournit 6 équations :
{ } { } { } { }0/22/11/00/0 υυυυ ++=

53MK02 : Mécanique des systèmes
DDééfinition de la mobilitfinition de la mobilitéé dd’’un systun systèèmeme
On compte le nombre d’inconnues cinématiques :
On compte le nombre d’équations cinématiques :
On résout le système linéaire cinématique :
∑= cc iI
cr
cr
cE
RSGc NE += μ6
cI On identifie le rang du sytème rc(le nombre d’équations libres du système)
On définit la mobilité du système comme la somme des inconnues cinématiques incalculables.
ccc rIm −=
cm
La mobilité correspond au nombre de paramètres indépendants capable de commander complètement le système.
54MK02 : Mécanique des systèmes
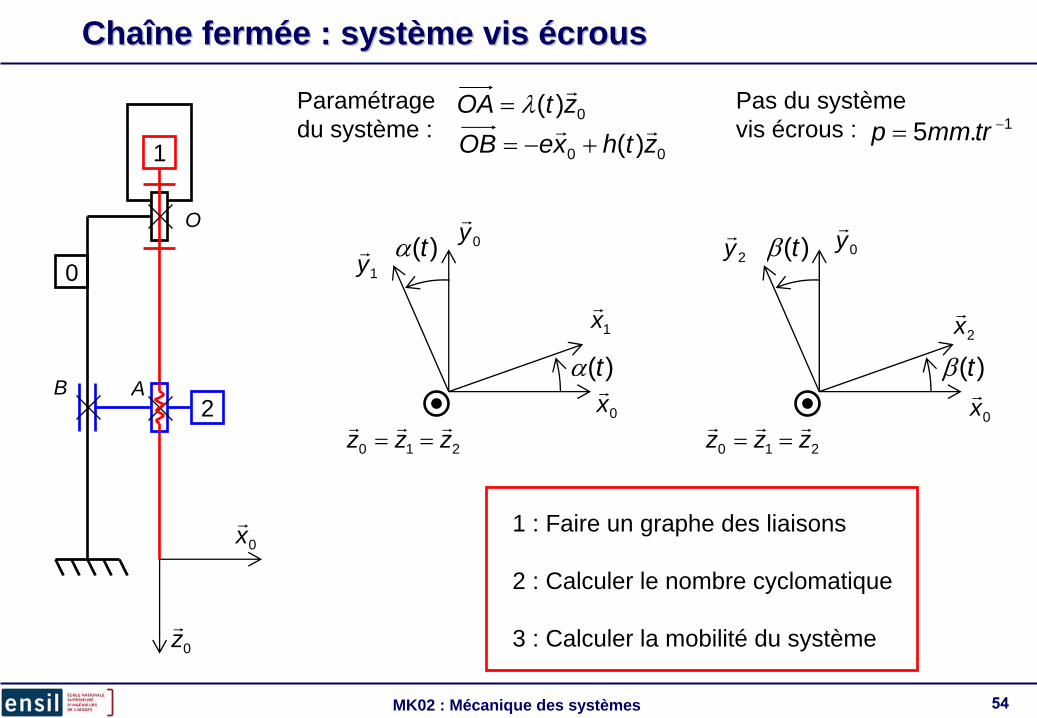
ChaChaîîne fermne ferméée : syste : systèème vis me vis éécrouscrous
1
0
2
1 : Faire un graphe des liaisons
2 : Calculer le nombre cyclomatique
3 : Calculer la mobilité du système
0xr
1xr
1yr
)(tα
)(tα 0yr
0zr
0xr
O
A
Paramétrage du système :
0)( ztOAr
λ= Pas du système vis écrous : 1.5 −= trmmp
0yr
)(tβ
)(tβ2yr
0xr
210 zzzrrr
==
B
00 )( zthxeOBrr
+−=
2xr
210 zzzrrr
==
55MK02 : Mécanique des systèmes
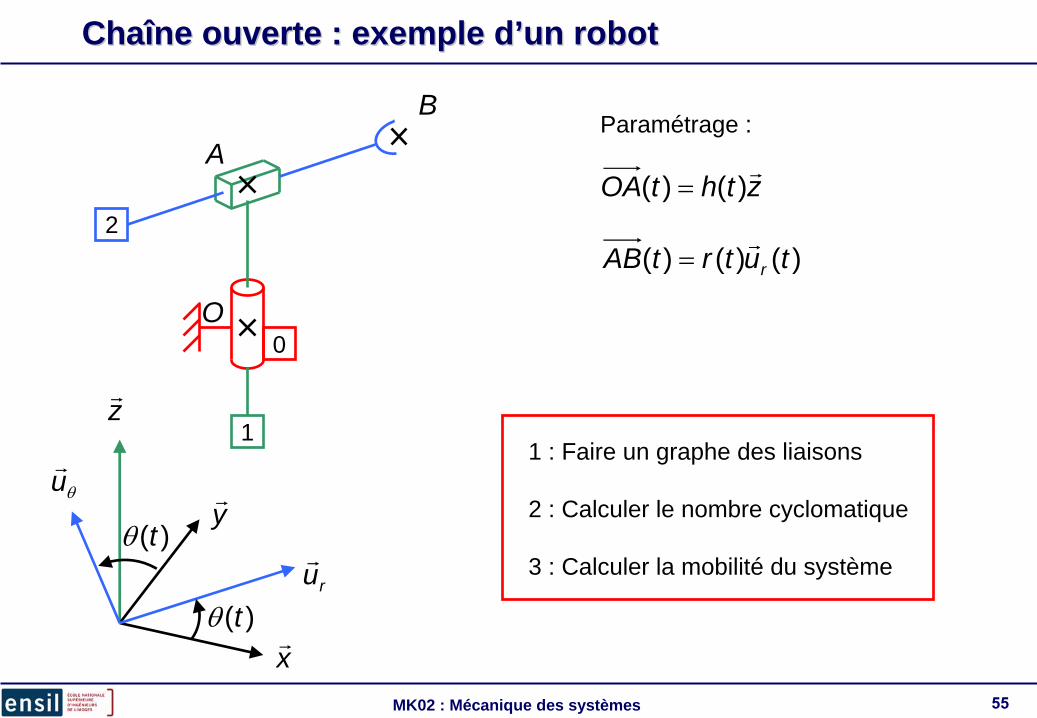
ChaChaîîne ouverte : exemple dne ouverte : exemple d’’un robotun robot
O
A
0
1
2
B
xr
yr
zr
rur
θur
)(tθ
)(tθ
zthtOAr
)()( =
)()()( tutrtAB r
r=
Paramétrage :
1 : Faire un graphe des liaisons
2 : Calculer le nombre cyclomatique
3 : Calculer la mobilité du système
56MK02 : Mécanique des systèmes
Fermeture gFermeture gééomoméétriquetrique
0xr
1xr
)(tα
O
B
C
A
2xr
)(tβ
3
1
2
0
0yr
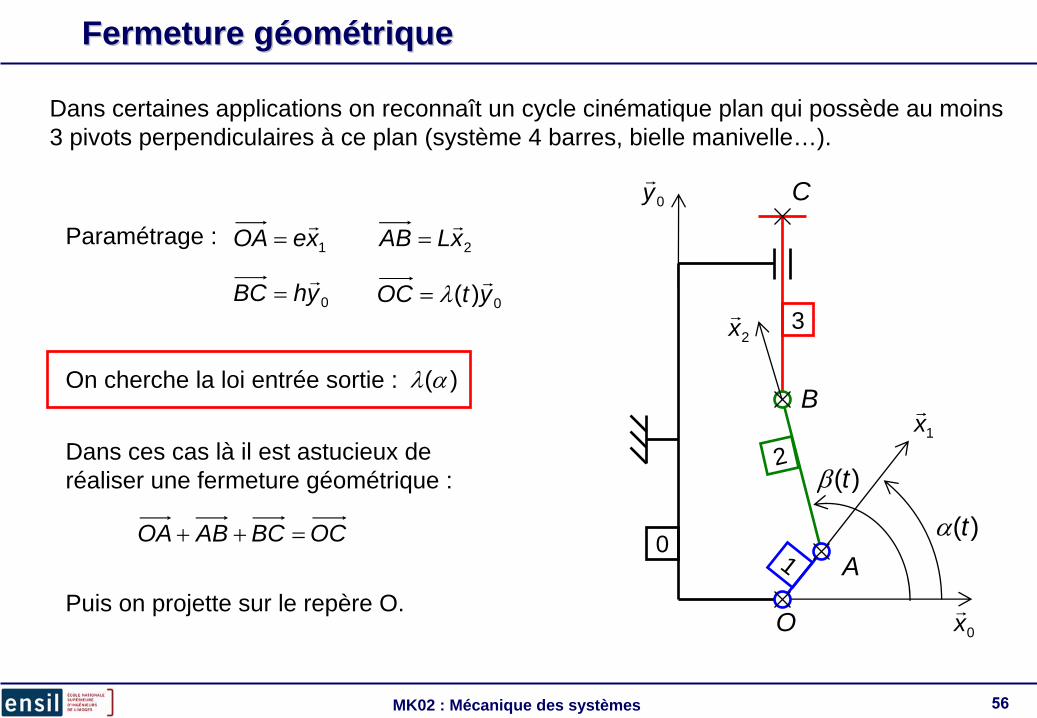
Dans certaines applications on reconnaît un cycle cinématique plan qui possède au moins 3 pivots perpendiculaires à ce plan (système 4 barres, bielle manivelle…).
Dans ces cas là il est astucieux de réaliser une fermeture géométrique :
Paramétrage : 1xeOAr
= 2xLABr
=
0yhBCr
= 0)( ytOCr
λ=
On cherche la loi entrée sortie : )(αλ
OCBCABOA =++
Puis on projette sur le repère O.
57MK02 : Mécanique des systèmes
Plan du coursPlan du cours
1 Modélisation des systèmes mécaniques :Rappels sur les bases, les repères, les coordonnées.Rappels sur les produits scalaire et vectoriel.Paramétrage dans l’espace, matrice de changement de repère.Modélisation de liaisons particulières : ressort et amortisseur
2 Cinématique du solide :Vitesse d’un point matériel et dérivation vectorielVitesse d’un point coïncident à un solideMouvements particuliers des solidesCIR, base et roulantesThéorie cinématique des mécanismes
3 Aspect dynamique des systèmes :Masse et centre de masseOpérateur d’inertie des solides.Principe fondamental de la dynamique et applications.Théorie dynamique des mécanismes
58MK02 : Mécanique des systèmes
CinCinéétique : tique : éénergie, masse, espace et tempsnergie, masse, espace et temps
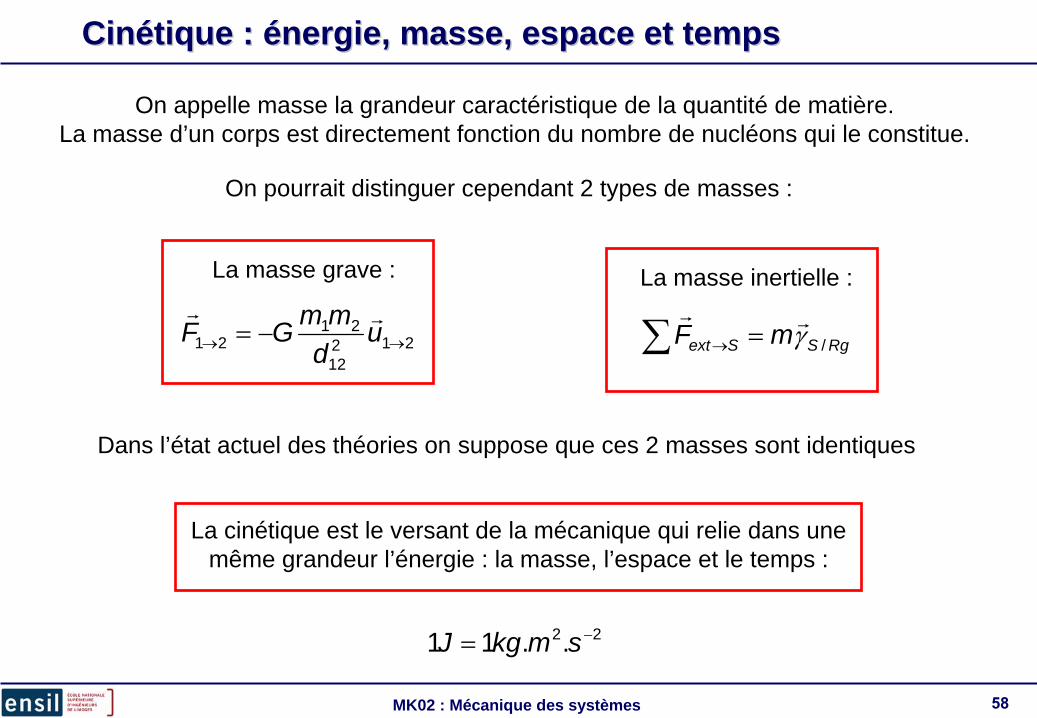
On appelle masse la grandeur caractéristique de la quantité de matière.La masse d’un corps est directement fonction du nombre de nucléons qui le constitue.
La cinétique est le versant de la mécanique qui relie dans une même grandeur l’énergie : la masse, l’espace et le temps :
22..11 −= smkgJ
On pourrait distinguer cependant 2 types de masses :
La masse grave :
21212
2121 →→ −= u
dmmGF
rr∑ =→ RgSSext mF /γ
rrLa masse inertielle :
Dans l’état actuel des théories on suppose que ces 2 masses sont identiques

59MK02 : Mécanique des systèmes
Impulsion / quantitImpulsion / quantitéé de mouvementde mouvement
PhilosophiaeNaturalis PrincipiaMathematicad’Isaac Newton publié en 1687
0dmdm =
Théorie de la relativitérestreinte d’Albert Einstein publiée en 1905
20/
0
)(1 cvdmdm
M−=
On définit l’impulsion (ou quantité de mouvement) d’une particule en mouvement par rapport à un référentiel 0.
dm
0/MVr
0/0/ MVdmpdrr
=Masse de la particule :
dm
Vitesse de la particule par rapport à 0 : 0/MVr
0/pdr
cvM <<0/
60MK02 : Mécanique des systèmes
CinCinéétique dtique d’’un solideun solide
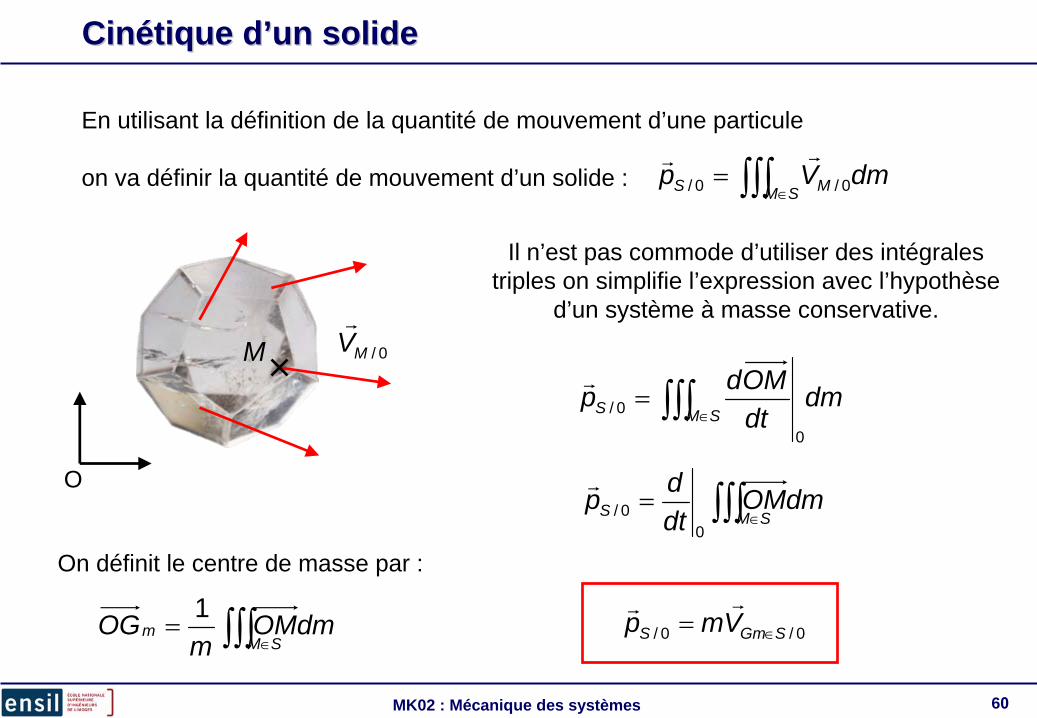
En utilisant la définition de la quantité de mouvement d’une particule
on va définir la quantité de mouvement d’un solide : ∫∫∫ ∈=
SM MS dmVp 0/0/
rr
∫∫∫ ∈=
SMS dmOMdtdp
00/
r
Il n’est pas commode d’utiliser des intégrales triples on simplifie l’expression avec l’hypothèse
d’un système à masse conservative.
O
dmdtOMdp
SMS
0
0/ ∫∫∫ ∈=
r
∫∫∫ ∈=
SMm dmOM
mOG 1
On définit le centre de masse par :
0/0/ SGmS Vmp ∈=rr
0/MVr
M
61MK02 : Mécanique des systèmes
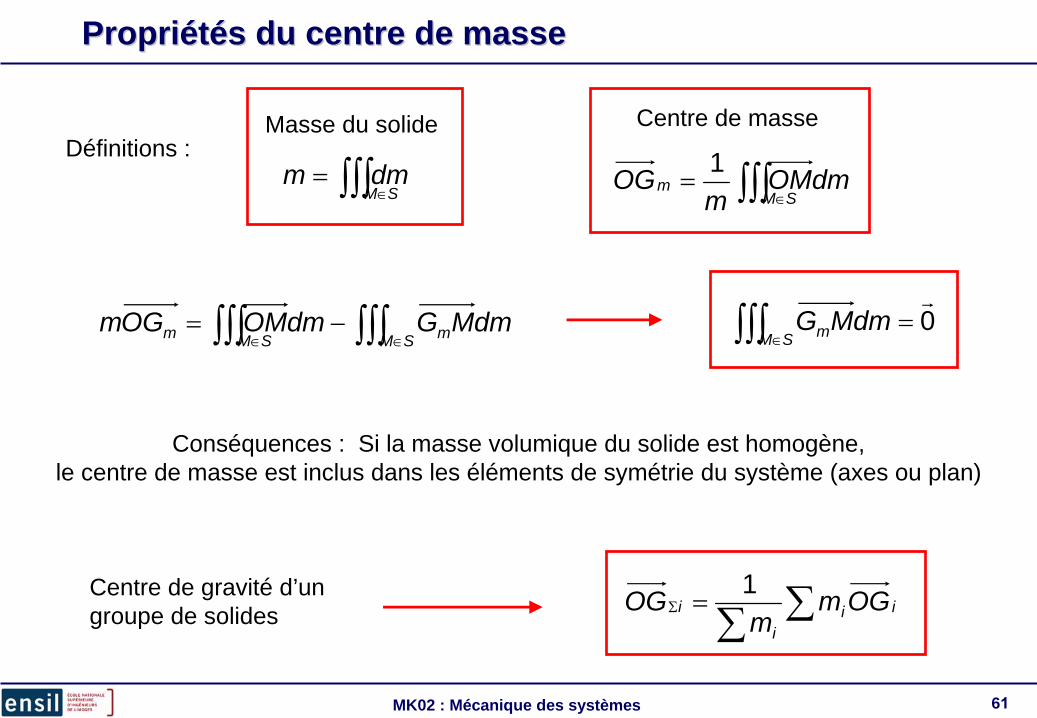
PropriPropriééttéés du centre de masses du centre de masse
∫∫∫ ∈=
SMm dmOM
mOG 1
Centre de masseMasse du solide
∫∫∫ ∈=
SMdmm
Définitions :
∫∫∫∫∫∫ ∈∈−=
SM mSMm dmMGdmOMOGm 0r
=∫∫∫ ∈SM m dmMG
Centre de gravité d’un groupe de solides ∑∑
=Σ iii
i OGmm
OG 1
Conséquences : Si la masse volumique du solide est homogène, le centre de masse est inclus dans les éléments de symétrie du système (axes ou plan)
62MK02 : Mécanique des systèmes
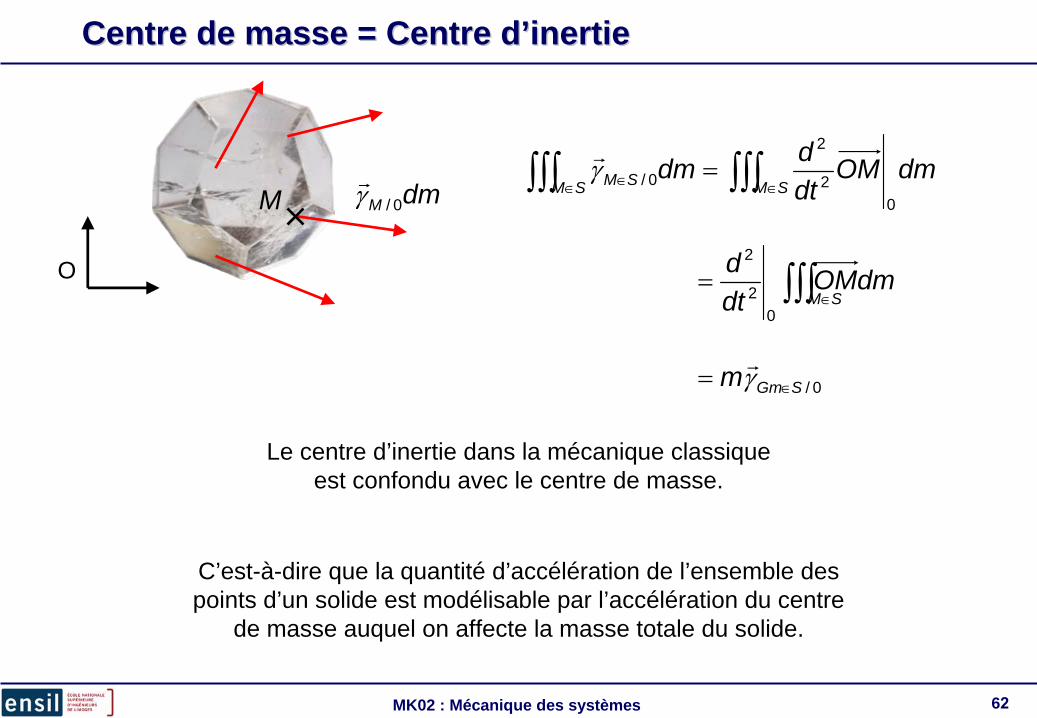
Centre de masse = Centre dCentre de masse = Centre d’’inertieinertie
O
Le centre d’inertie dans la mécanique classique est confondu avec le centre de masse.
∫∫∫∫∫∫ ∈∈ ∈ =SMSM SM dmOM
dtddm
02
2
0/γr
C’est-à-dire que la quantité d’accélération de l’ensemble des points d’un solide est modélisable par l’accélération du centre
de masse auquel on affecte la masse totale du solide.
dmM 0/γr
M
∫∫∫ ∈=
SMdmOM
dtd
02
2
0/SGmm ∈= γr
63MK02 : Mécanique des systèmes
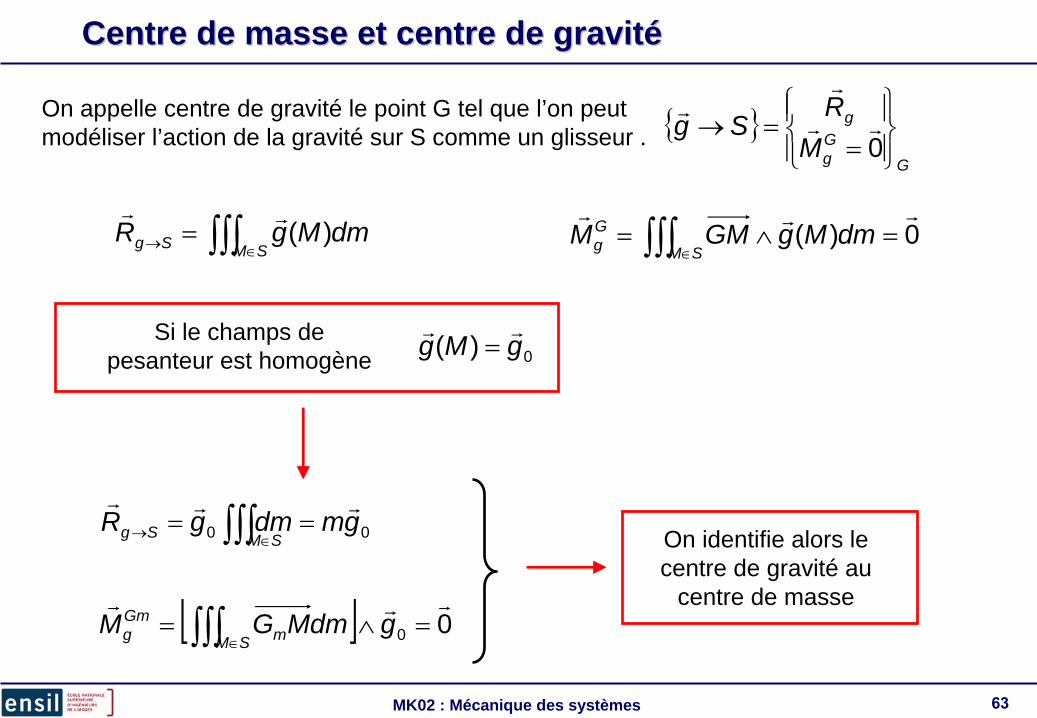
Centre de masse et centre de gravitCentre de masse et centre de gravitéé
0)( gMgrr
=
On appelle centre de gravité le point G tel que l’on peut modéliser l’action de la gravité sur S comme un glisseur . { }
GGg
g
MR
Sg⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
==→
0rr
rr
∫∫∫ ∈→ =SMSg dmMgR )(rr
0)(rrr
=∧= ∫∫∫ ∈SM
Gg dmMgGMM
Si le champs de pesanteur est homogène
00 gmdmgRSMSg
rrr== ∫∫∫ ∈→
[ ] 00
rrr=∧= ∫∫∫ ∈
gdmMGMSM m
Gmg
On identifie alors le centre de gravité au
centre de masse
64MK02 : Mécanique des systèmes
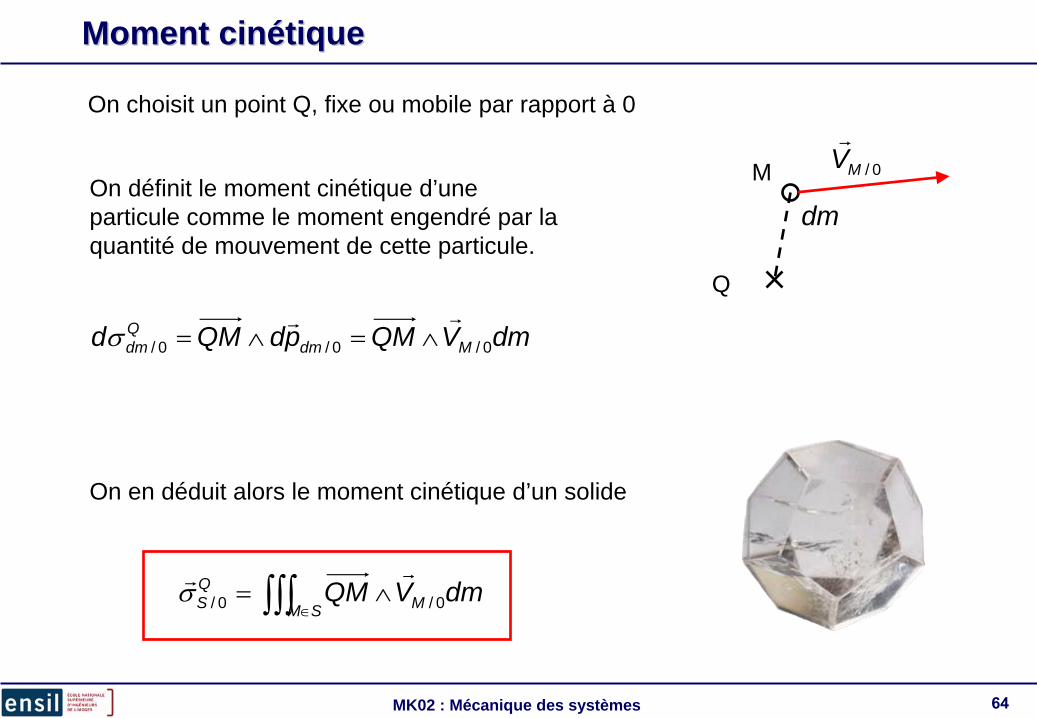
Moment cinMoment cinéétiquetique
On définit le moment cinétique d’une particule comme le moment engendré par la quantité de mouvement de cette particule.
0/MVr
dm
Q
dmVQMpdQMd MdmQdm 0/0/0/
rr∧=∧=σ
∫∫∫ ∈∧=
SM MQS dmVQM 0/0/
rrσ
On en déduit alors le moment cinétique d’un solide
On choisit un point Q, fixe ou mobile par rapport à 0
M
65MK02 : Mécanique des systèmes
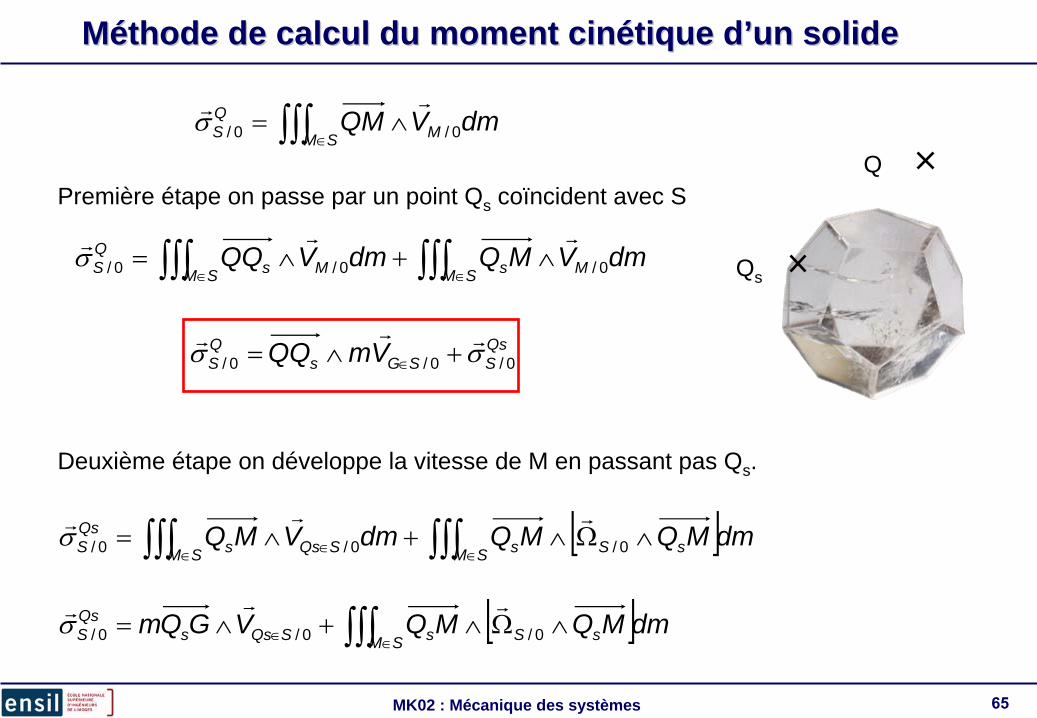
MMééthode de calcul du moment cinthode de calcul du moment cinéétique dtique d’’un solideun solide
Q
Qs
Première étape on passe par un point Qs coïncident avec S
∫∫∫ ∈∧=
SM MQS dmVQM 0/0/
rrσ
∫∫∫∫∫∫ ∈∈∧+∧=
SM MsSM MsQS dmVMQdmVQQ 0/0/0/
rrrσ
QsSSGs
QS VmQQ 0/0/0/ σσ rrr
+∧= ∈
Deuxième étape on développe la vitesse de M en passant pas Qs.
[ ]∫∫∫∫∫∫ ∈∈ ∈ ∧Ω∧+∧=SM sSsSM SQss
QsS dmMQMQdmVMQ 0/0/0/
rrrσ
[ ]∫∫∫ ∈∈ ∧Ω∧+∧=SM sSsSQss
QsS dmMQMQVGQm 0/0/0/
rrrσ

66MK02 : Mécanique des systèmes
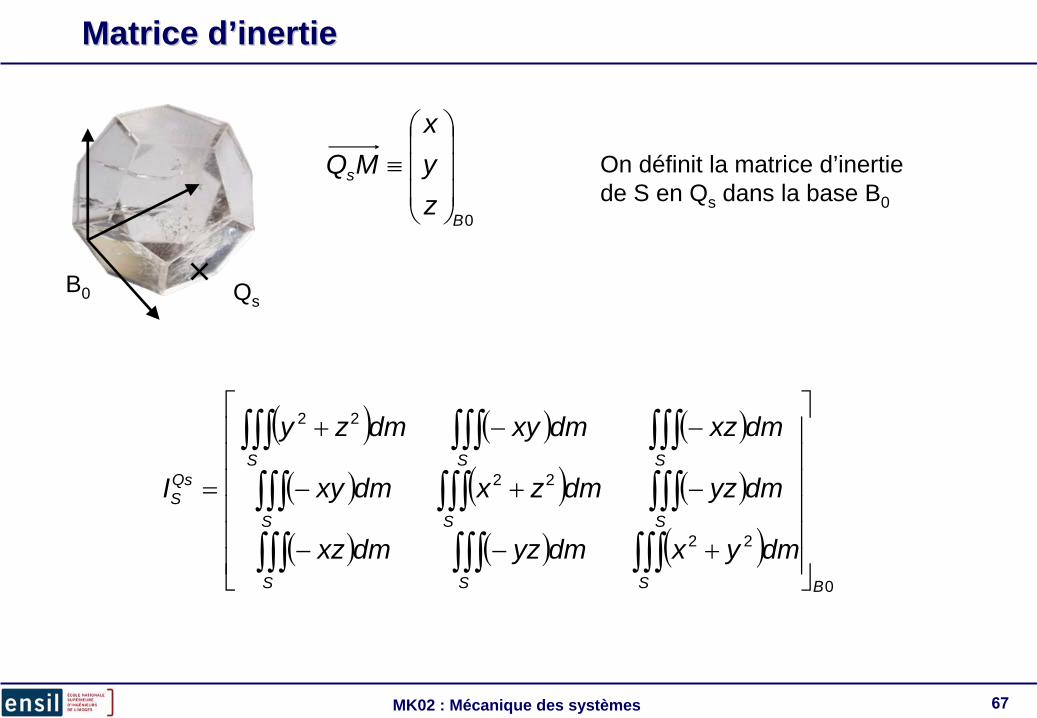
Matrice dMatrice d’’inertieinertie
[ ]∫∫∫ ∈∧Ω∧
SM sSs dmMQMQ 0/
rOn va réaliser une analyse du terme
afin d’en déduire un opérateur qui va directement s’appliquer au vecteur rotation.
On exprime les coordonnées dans la même base :⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡Ω
cba
S 0/
r
[ ] ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛++−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛++=∧Ω∧
zyx
zcybxacba
zyxMQMQ sSs )(2220/
r
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡
zyx
MQs
[ ]⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−−−+−−−+
=∧Ω∧cba
yxzyxzzyzxxyxzxyzy
MQMQ sSs22
22
22
0/
r
67MK02 : Mécanique des systèmes
Matrice dMatrice d’’inertieinertie
Qs
0B
s
zyx
MQ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛≡ On définit la matrice d’inertie
de S en Qs dans la base B0
B0
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )0
22
22
22
BSSS
SSS
SSSQsS
dmyxdmyzdmxz
dmyzdmzxdmxy
dmxzdmxydmzy
I
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
−+−
−−+
=
∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫∫
68MK02 : Mécanique des systèmes
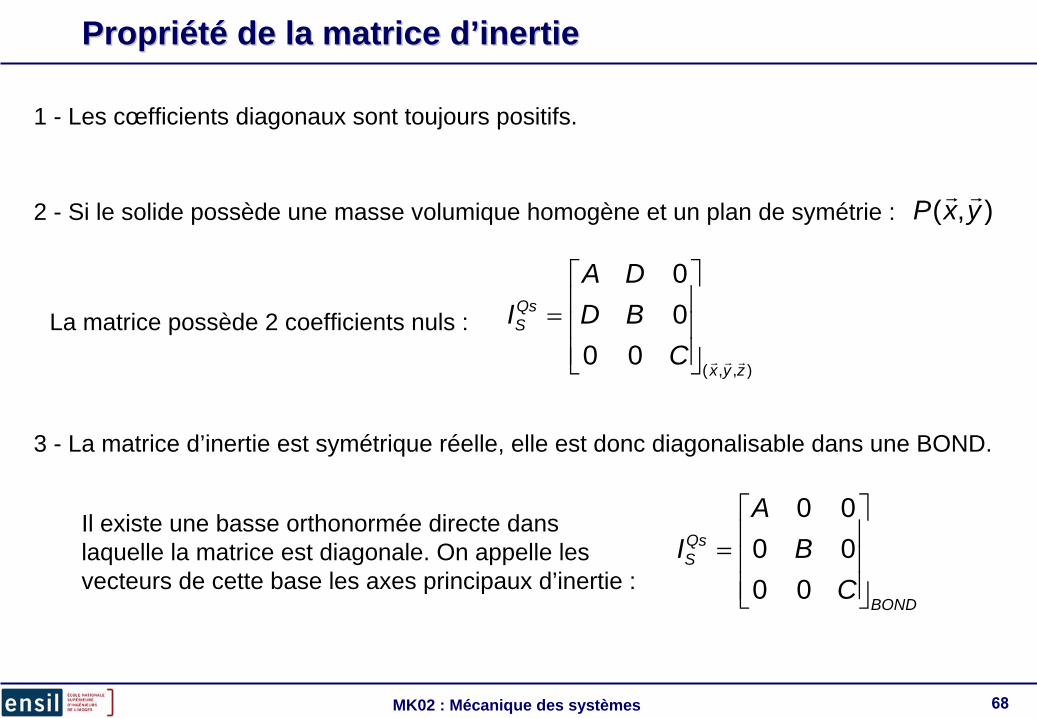
PropriPropriééttéé de la matrice dde la matrice d’’inertieinertie
3 - La matrice d’inertie est symétrique réelle, elle est donc diagonalisable dans une BOND.
Il existe une basse orthonormée directe dans laquelle la matrice est diagonale. On appelle les vecteurs de cette base les axes principaux d’inertie :
BOND
QsS
CB
AI
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
000000
1 - Les cœfficients diagonaux sont toujours positifs.
2 - Si le solide possède une masse volumique homogène et un plan de symétrie :
),,(00
00
zyx
QsS
CBDDA
Irrr⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
),( yxPrr
La matrice possède 2 coefficients nuls :
69MK02 : Mécanique des systèmes
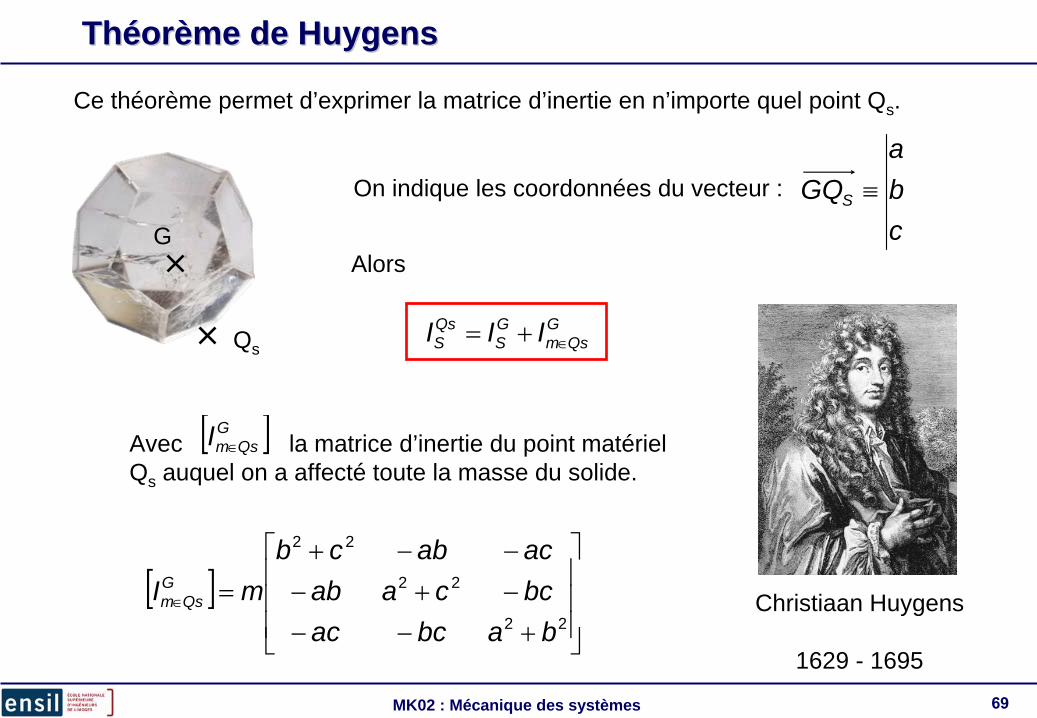
ThThééororèème de Huygensme de Huygens
Christiaan Huygens
1629 - 1695
Ce théorème permet d’exprimer la matrice d’inertie en n’importe quel point Qs.
cba
GQS ≡
Qs
G
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−−−+−−−+
=∈22
22
22
babcacbccaabacabcb
mIGQsm
On indique les coordonnées du vecteur :
GQsm
GS
QsS III ∈+=
Avec la matrice d’inertie du point matériel Qs auquel on a affecté toute la masse du solide.
[ ]GQsmI ∈
Alors
70MK02 : Mécanique des systèmes
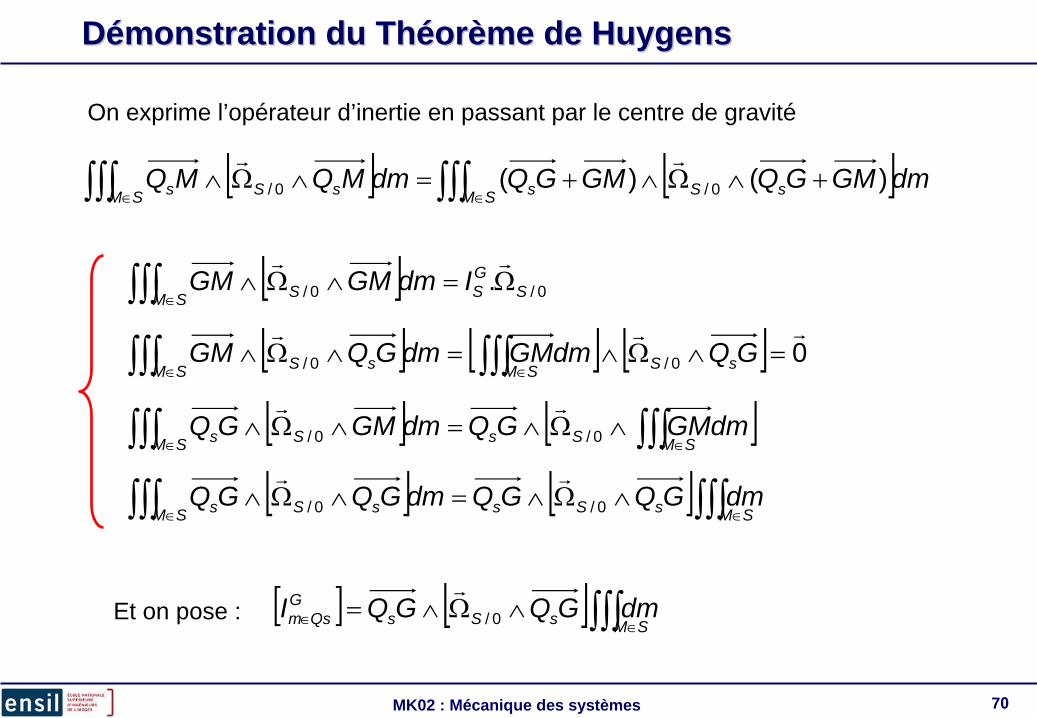
DDéémonstration du Thmonstration du Thééororèème de Huygensme de Huygens
On exprime l’opérateur d’inertie en passant par le centre de gravité
[ ] [ ]∫∫∫∫∫∫ ∈∈+∧Ω∧+=∧Ω∧
SM sSsSM sSs dmGMGQGMGQdmMQMQ )()( 0/0/
rr
[ ] [ ]∫∫∫∫∫∫ ∈∈∧Ω∧=∧Ω∧
SMsSsSM sSs dmGQGQdmGQGQ 0/0/
rr
[ ] [ ]∫∫∫∫∫∫ ∈∈∧Ω∧=∧Ω∧
SMSsSM Ss dmGMGQdmGMGQ 0/0/
rr
[ ] [ ] [ ] 00/0/
rrr=∧Ω∧=∧Ω∧ ∫∫∫∫∫∫ ∈∈
GQdmGMdmGQGM sSSMSM sS
[ ] 0/0/ . SGSSM S IdmGMGM Ω=∧Ω∧∫∫∫ ∈
rr
[ ] [ ]∫∫∫ ∈∈ ∧Ω∧=SMsSs
GQsm dmGQGQI 0/
rEt on pose :

71MK02 : Mécanique des systèmes
Utilisation des outils de CATIAUtilisation des outils de CATIA
Outil Matériau :
Permet d’appliquer les propriétés d’un matériau àune géométrie :
Masse volumique, Module d’Young,Conductivité thermique …
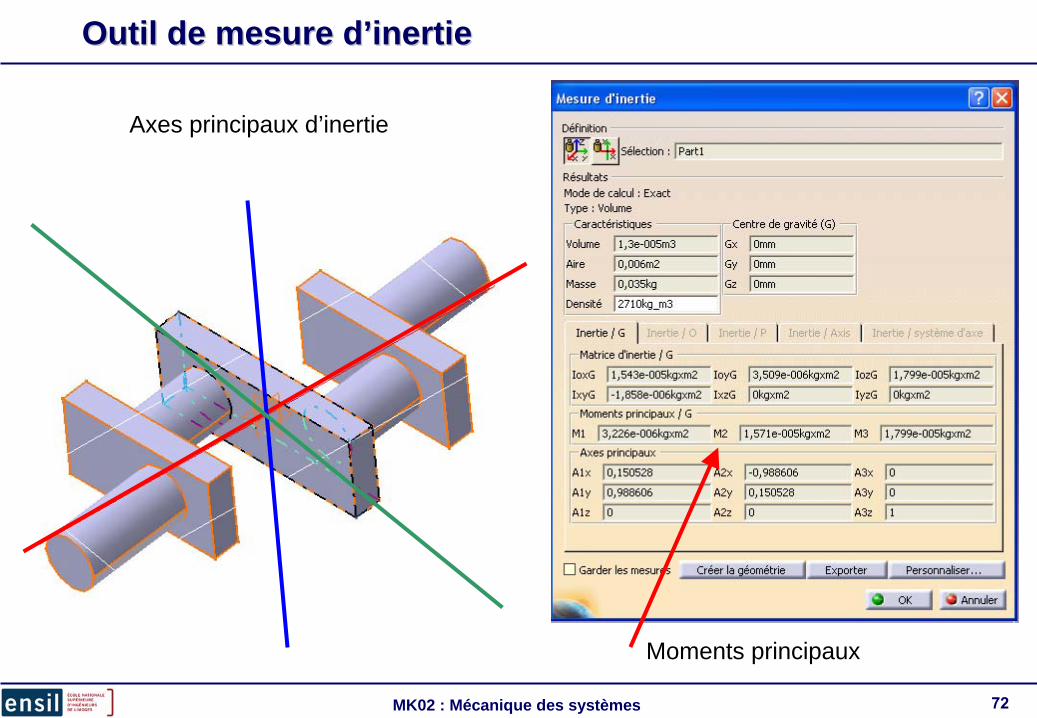
Outil Mesure d’inertie :
Permet de calculer les inerties des solides :
Masse,Centre de masse,Inertie
72MK02 : Mécanique des systèmes
Outil de mesure dOutil de mesure d’’inertie inertie
Moments principaux
Axes principaux d’inertie
73MK02 : Mécanique des systèmes
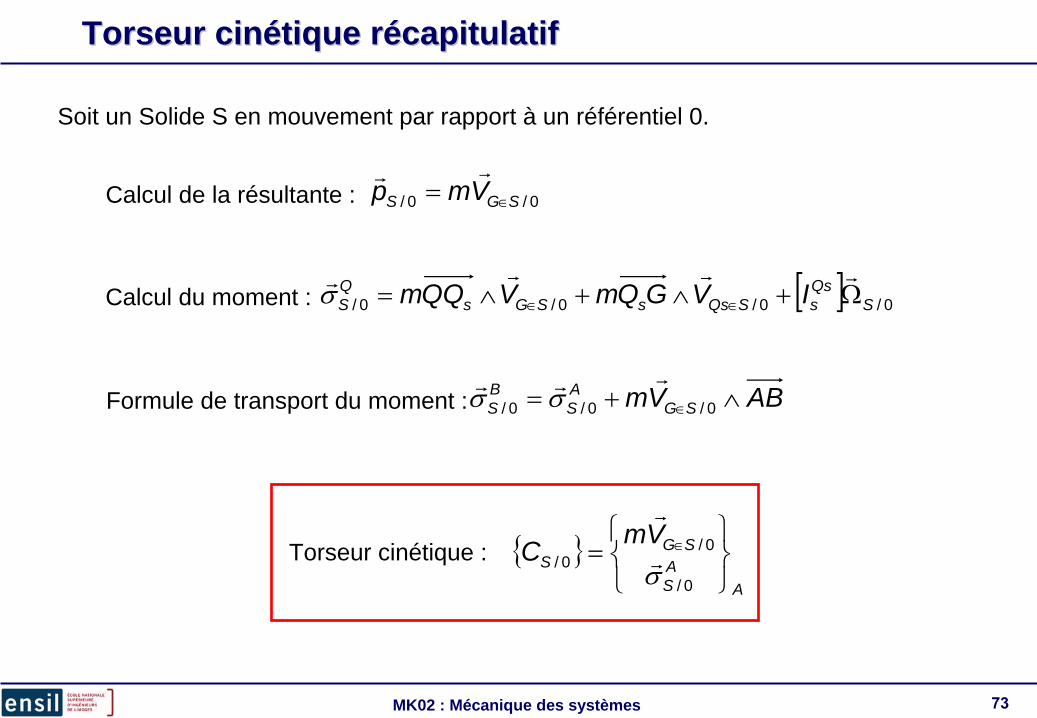
Torseur cinTorseur cinéétique rtique réécapitulatifcapitulatif
Calcul de la résultante : 0/0/ SGS Vmp ∈=rr
Calcul du moment : [ ] 0/0/0/0/ SQssSQssSGs
QS IVGQmVQQm Ω+∧+∧= ∈∈
rrrrσ
Formule de transport du moment : ABVm SGAS
BS ∧+= ∈ 0/0/0/
rrr σσ
Torseur cinétique : { }A
AS
SGS
VmC⎭⎬⎫
⎩⎨⎧
= ∈
0/
0/0/ σr
r
Soit un Solide S en mouvement par rapport à un référentiel 0.
74MK02 : Mécanique des systèmes
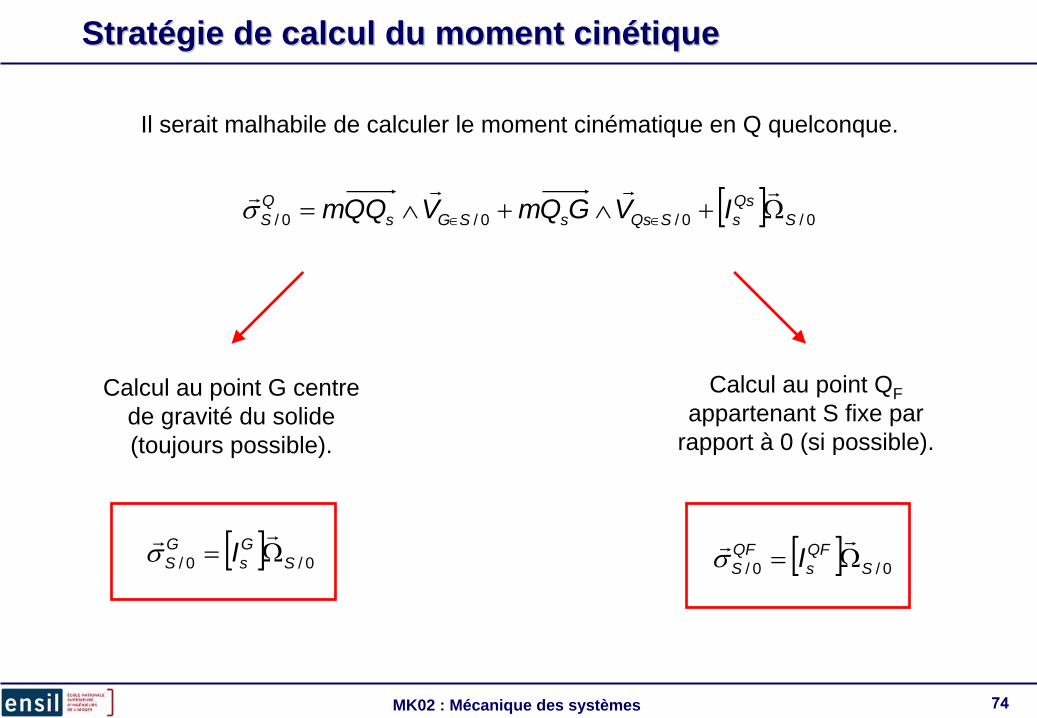
StratStratéégie de calcul du moment cingie de calcul du moment cinéétiquetique
Il serait malhabile de calculer le moment cinématique en Q quelconque.
[ ] 0/0/0/0/ SQssSQssSGs
QS IVGQmVQQm Ω+∧+∧= ∈∈
rrrrσ
[ ] 0/0/ SGs
GS I Ω=
rrσ [ ] 0/0/ SQFs
QFS I Ω=
rrσ
Calcul au point G centre de gravité du solide (toujours possible).
Calcul au point QFappartenant S fixe par
rapport à 0 (si possible).
75MK02 : Mécanique des systèmes
RRéésumsuméé des thdes thééories de Newtonories de Newton
« Tout corps persévère dans l'état de repos ou de mouvement uniforme en ligne droite dans lequel il se trouve, à moins que quelque force n'agisse sur lui et ne le contraigne à changer d'état. »
Première loi de Newton
Seconde loi de Newton « L’accélération subie par un corps dans un référentiel galiléen est proportionnelle à la résultante des forces qu'il subit, et inversement proportionnelle à sa masse m. »
Troisième loi de Newton (principe des actions réciproques)
« Tout corps A exerçant une force sur un corps B subit une force d'intensitéégale, de même direction mais de sens opposé, exercée par le corps B. »
« Deux référentiels d'espace en translation rectiligne uniforme l'un par rapport à l'autre sont équivalents pour les lois de la mécanique. »
Le principe de relativité

76MK02 : Mécanique des systèmes
RRééfféérentiel Galilrentiel Galilééenen
Newton POSTULE l’existence d’un temps et d’un espace absolu.
Cet ensemble forme ce que l’on appelle un référentiel Galiléen.
Ce référentiel est sensé être parfaitement immobile dans l’espace.
Le temps qui s’y écoule devient la référence des temps pour tous les autres référentiels.
Le seul candidat acceptable serait le centre de masse de l’univers.
Un référentiel Galiléen est un référentiel dans lequel les lois de Newton s’appliquent.
On utilise également le centre de masse du système solaire (héliocentrique) ou de centre de masse de la terre (géocentrique).
77MK02 : Mécanique des systèmes
Principe fondamental de la statiquePrincipe fondamental de la statique
Règle n°1 « Il ne faut jamais essayer d’écraser une mouche avec une massue. »
Dans un référentiel galiléen la somme des torseurs des actions extérieures sur un groupe de solides statiques est nulle.
{ } { }∑ →=k
ik Sext0
La résolution graphique est à privilégier dés qu’elle est possible.
Solides soumis à 2 glisseurs : Les résultantes sont opposées de même droite d’action
Solides soumis à 3 glisseurs :
2 actions sont parallèles : la troisième est parallèle et on applique les bras de levier.
2 actions sont concourantes : la troisième est concourante et on applique le triangle des forces.
78MK02 : Mécanique des systèmes
Principe de la conservation de la quantitPrincipe de la conservation de la quantitéé de mouvementde mouvement
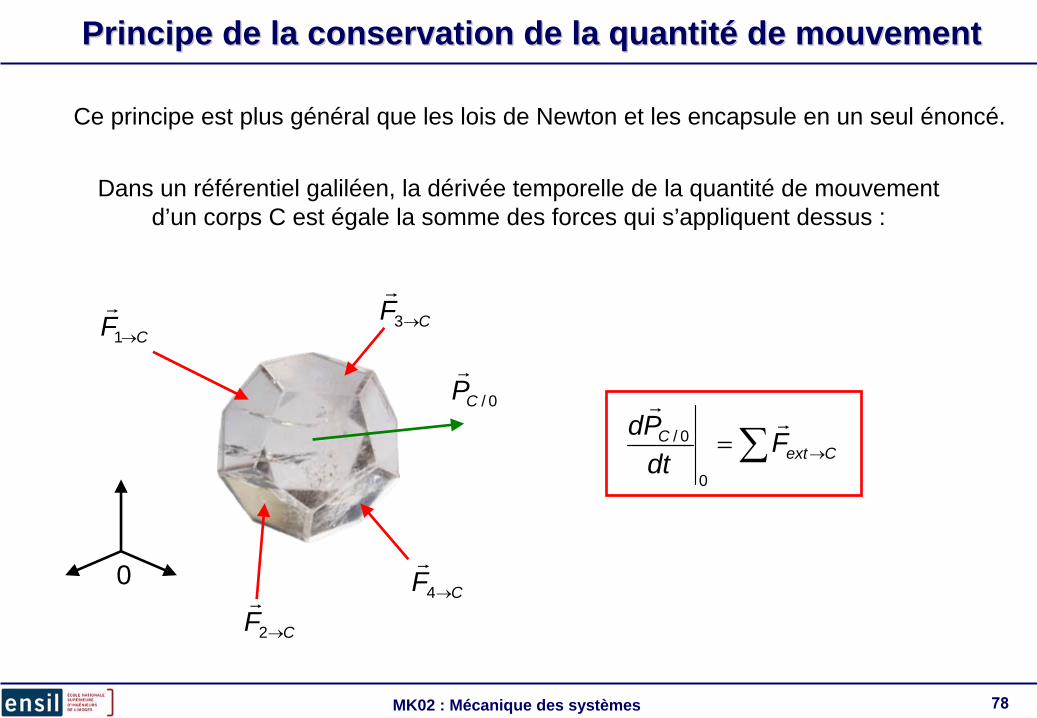
Ce principe est plus général que les lois de Newton et les encapsule en un seul énoncé.
Dans un référentiel galiléen, la dérivée temporelle de la quantité de mouvement d’un corps C est égale la somme des forces qui s’appliquent dessus :
CF →1
r
CF →2
r
CF →3
r
CF →4
r0
0/CPr
∑ →= CextC F
dtPd rr
0
0/
79MK02 : Mécanique des systèmes
HypothHypothèèse de masse conservativese de masse conservative
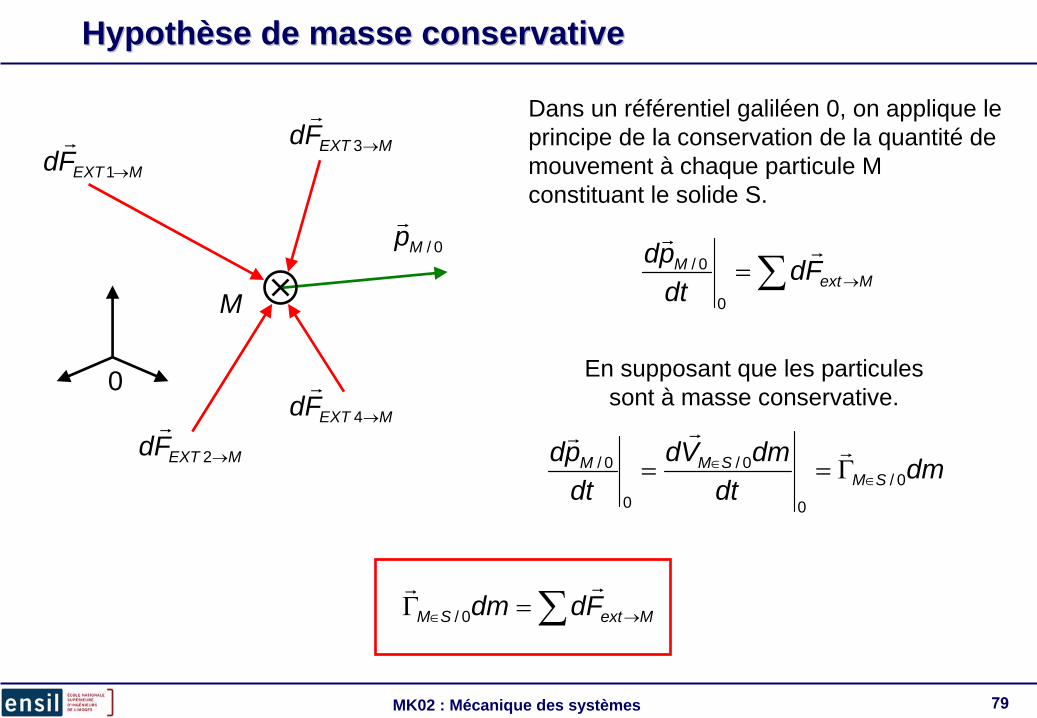
∑ →= MextM Fd
dtpd rr
0
0/
Dans un référentiel galiléen 0, on applique le principe de la conservation de la quantité de mouvement à chaque particule M constituant le solide S.
En supposant que les particules sont à masse conservative.
∑ →∈ =Γ MextSM Fddmrr
0/
dmdt
dmVddtpd
SMSMM
0/
0
0/
0
0/∈
∈ Γ==r
rr
MEXTFd →1
r
MEXTFd →2
r
MEXTFd →3
r
MEXTFd →4
r0
0/Mpr
M
80MK02 : Mécanique des systèmes
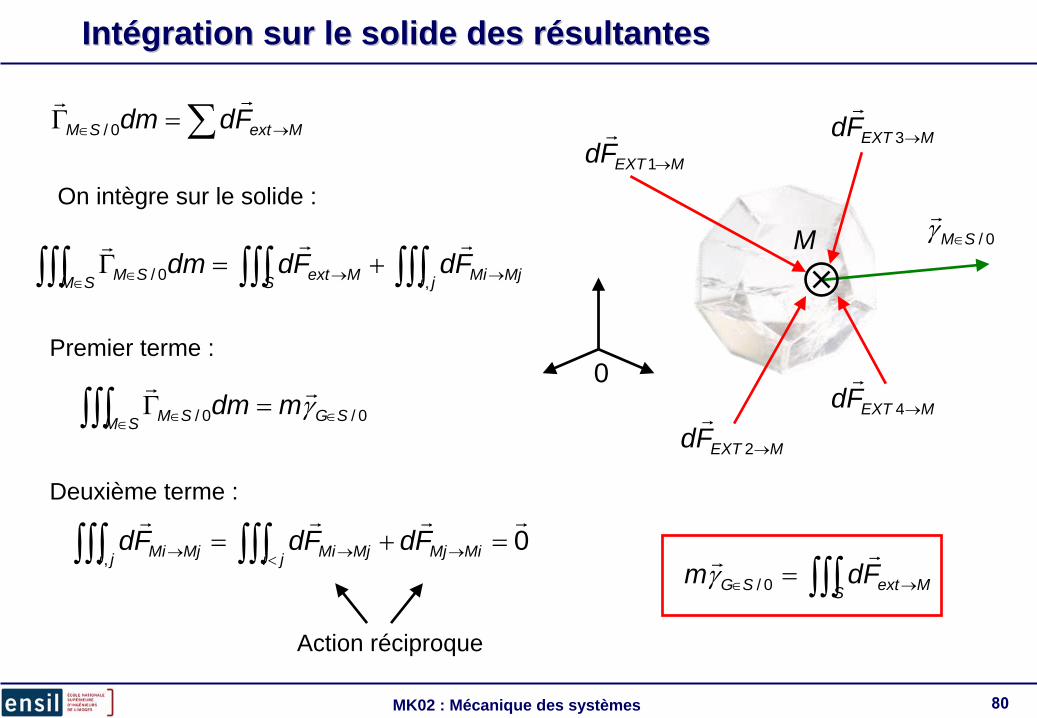
IntIntéégration sur le solide des rgration sur le solide des réésultantessultantes
MEXTFd →1
r
MEXTFd →2
r
MEXTFd →3
r
MEXTFd →4
r0
0/SM∈γr
M
∑ →∈ =Γ MextSM Fddmrr
0/
On intègre sur le solide :
∫∫∫∫∫∫∫∫∫ →→∈ ∈ +=Γji MjMiS MextSM SM FdFddm
,0/
rrr
0,
rrrr=+= →< →→ ∫∫∫∫∫∫ MiMjji MjMiji MjMi FdFdFd
Premier terme :
Deuxième terme :
0/0/ SGSM SM mdm ∈∈ ∈ =Γ∫∫∫ γrr
∫∫∫ →∈ =S MextSG Fdm
rr0/γ
Action réciproque
81MK02 : Mécanique des systèmes
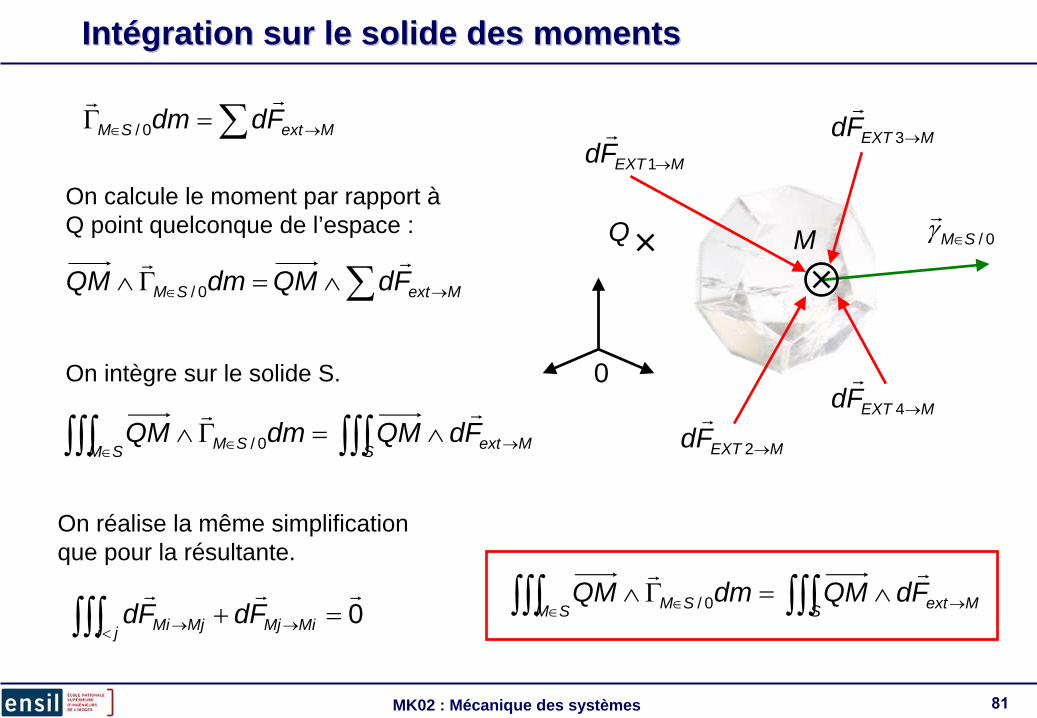
IntIntéégration sur le solide des momentsgration sur le solide des moments
On calcule le moment par rapport àQ point quelconque de l’espace :
On intègre sur le solide S.
On réalise la même simplification que pour la résultante.
∫∫∫∫∫∫ →∈ ∈ ∧=Γ∧S MextSM SM FdQMdmQM
rr0/
∑ →∈ =Γ MextSM Fddmrr
0/
∑ →∈ ∧=Γ∧ MextSM FdQMdmQMrr
0/
0rrr
=+ →< →∫∫∫ MiMjji MjMi FdFd ∫∫∫∫∫∫ →∈ ∈ ∧=Γ∧S MextSM SM FdQMdmQM
rr0/
Q
MEXTFd →1
r
MEXTFd →2
r
MEXTFd →3
r
MEXTFd →4
r0
0/SM∈γr
M
82MK02 : Mécanique des systèmes
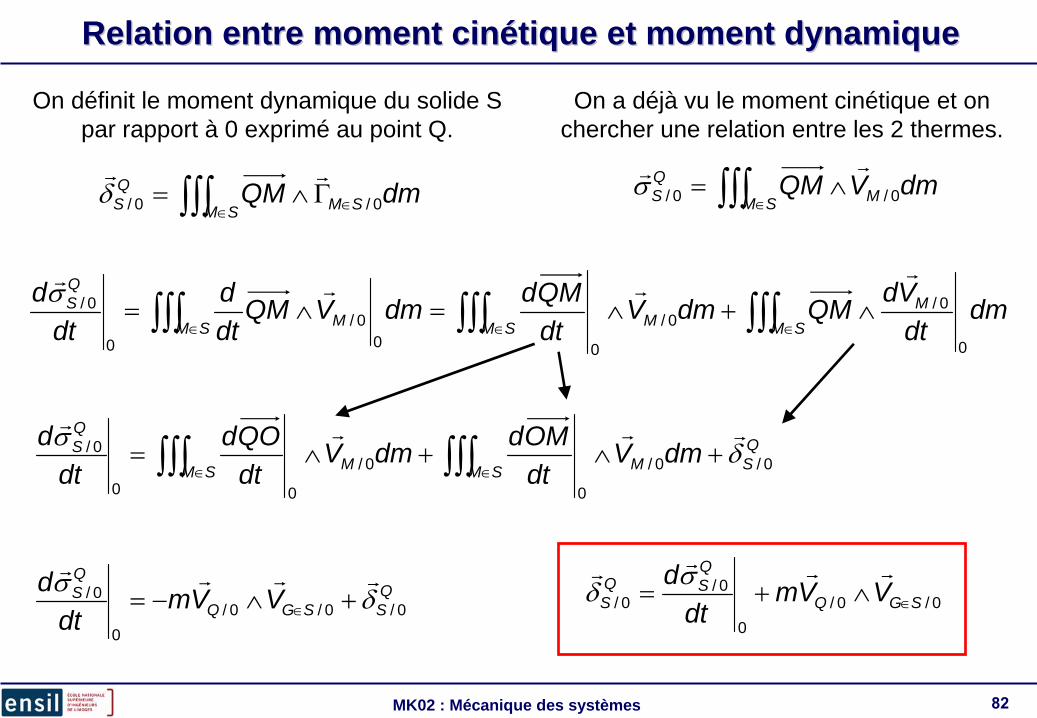
Relation entre moment cinRelation entre moment cinéétique et moment dynamiquetique et moment dynamique
On définit le moment dynamique du solide S par rapport à 0 exprimé au point Q.
∫∫∫ ∈ ∈Γ∧=SM SM
QS dmQM 0/0/
rrδ
On a déjà vu le moment cinétique et on chercher une relation entre les 2 thermes.
∫∫∫ ∈∧=
SM MQS dmVQM 0/0/
rrσ
∫∫∫∫∫∫∫∫∫ ∈∈∈∧+∧=∧=
SMM
SM MSM M
QS dm
dtVdQMdmV
dtQMddmVQM
dtd
dtd
0
0/0/
000/
0
0/
rrrrσ
QSSM MSM M
QS dmV
dtOMddmV
dtQOd
dtd
0/0/
0
0/
00
0/ δσ rrrr
+∧+∧= ∫∫∫∫∫∫ ∈∈
QSSGQ
QS VVm
dtd
0/0/0/0
0/ δσ rrrr
+∧−= ∈ 0/0/0
0/0/ SGQ
QSQ
S VVmdt
d∈∧+=
rrrr σδ
83MK02 : Mécanique des systèmes
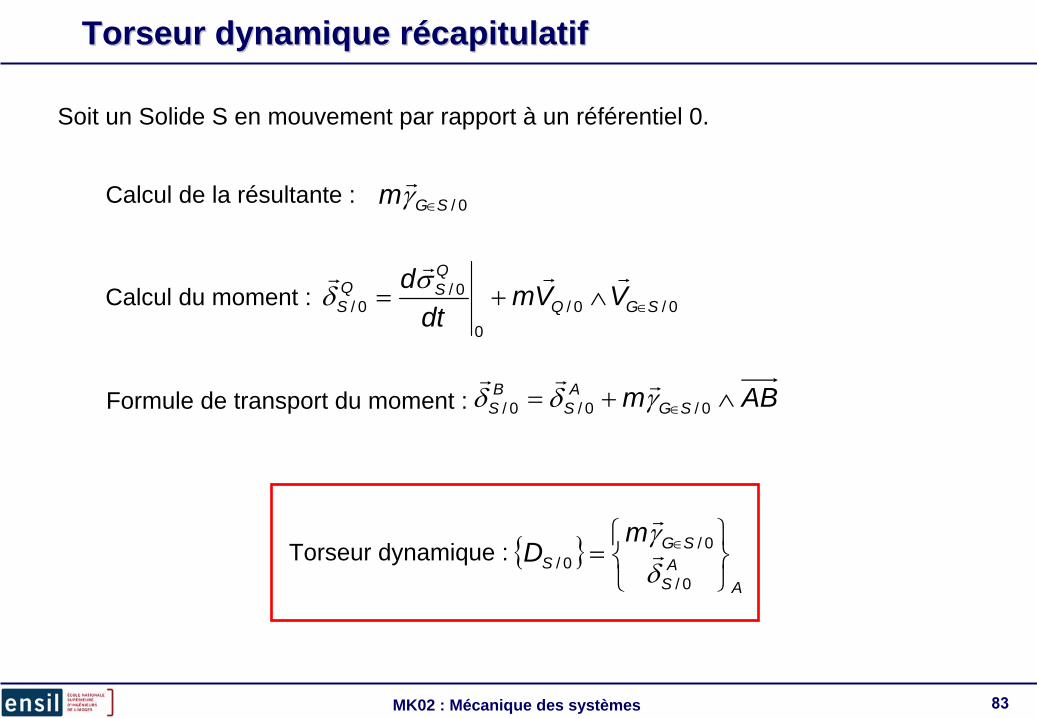
Torseur dynamique rTorseur dynamique réécapitulatifcapitulatif
Calcul de la résultante :
Calcul du moment :
Formule de transport du moment : ABm SGA
SB
S ∧+= ∈ 0/0/0/ γδδrrr
Torseur dynamique : { }A
AS
SGS
mD
⎭⎬⎫
⎩⎨⎧
= ∈
0/
0/0/ δ
γr
r
Soit un Solide S en mouvement par rapport à un référentiel 0.
0/SGm ∈γr
0/0/0
0/0/ SGQ
QSQ
S VVmdt
d∈∧+=
rrrr σδ
84MK02 : Mécanique des systèmes
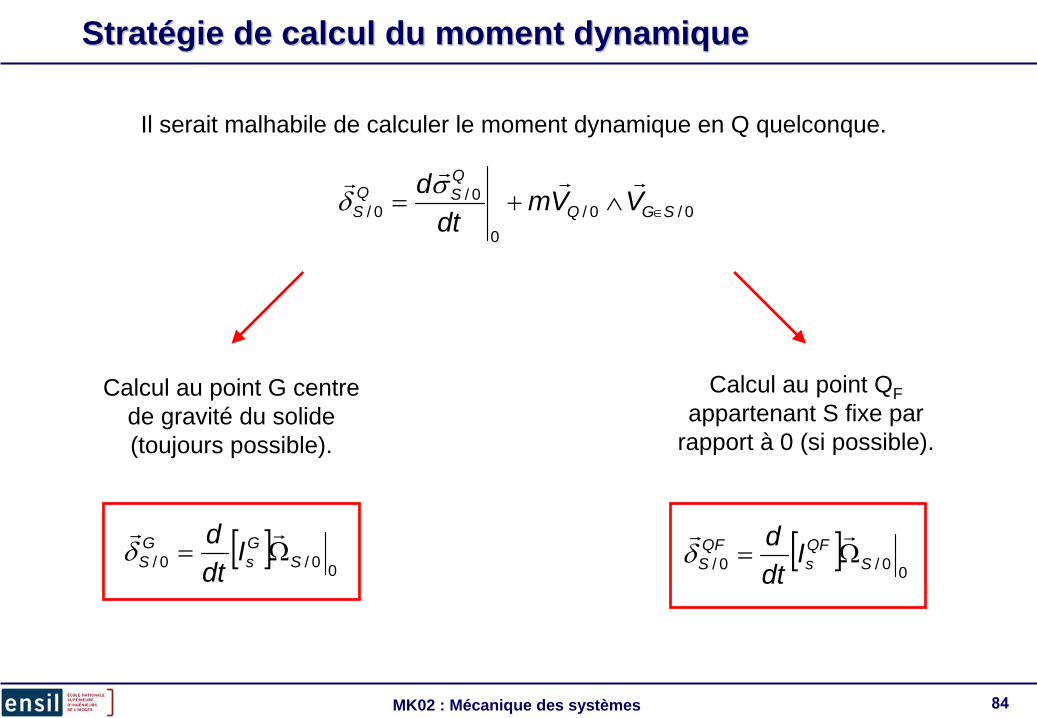
StratStratéégie de calcul du moment dynamiquegie de calcul du moment dynamique
Il serait malhabile de calculer le moment dynamique en Q quelconque.
[ ]00/0/ S
Gs
GS I
dtd
Ω=rr
δ
Calcul au point G centre de gravité du solide (toujours possible).
Calcul au point QFappartenant S fixe par
rapport à 0 (si possible).
0/0/0
0/0/ SGQ
QSQ
S VVmdt
d∈∧+=
rrrr σδ
[ ]00/0/ S
QFs
QFS I
dtd
Ω=rr
δ
85MK02 : Mécanique des systèmes
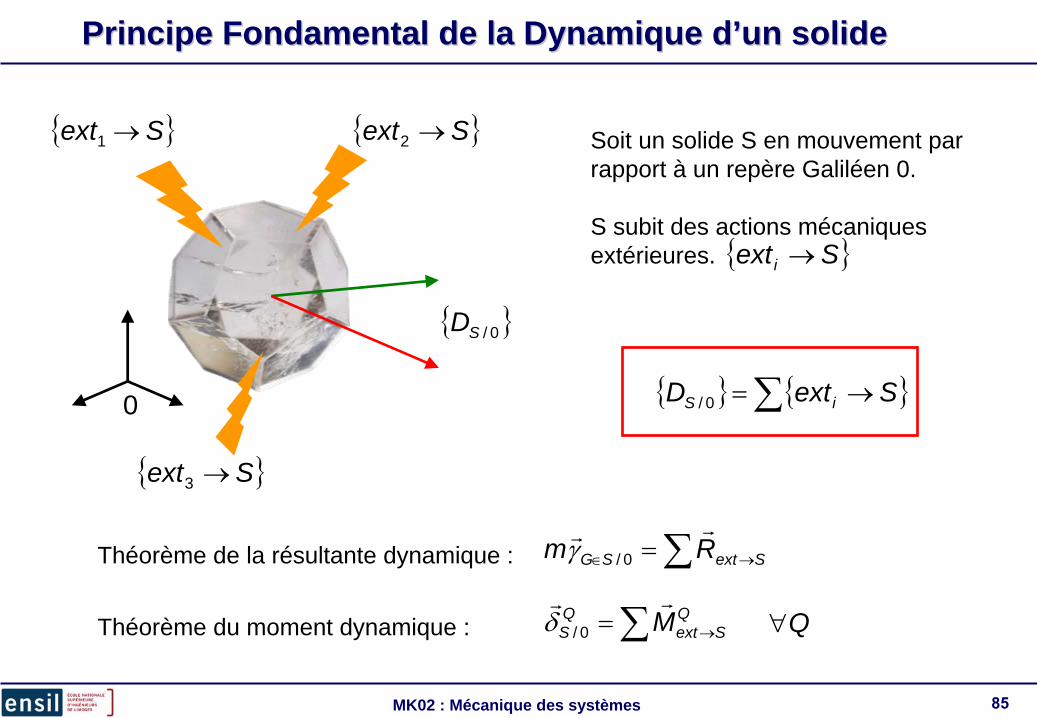
Principe Fondamental de la Dynamique dPrincipe Fondamental de la Dynamique d’’un solideun solide
0
{ }Sext →3
{ }Sext →1 { }Sext →2
{ }0/SD
Soit un solide S en mouvement par rapport à un repère Galiléen 0.
S subit des actions mécaniques extérieures. { }Sexti →
{ } { }∑ →= SextD iS 0/
Théorème de la résultante dynamique :
Théorème du moment dynamique :
∑ →∈ = SextSG Rmrr
0/γ
∑ →= QSext
QS M
rr0/δ Q∀
86MK02 : Mécanique des systèmes
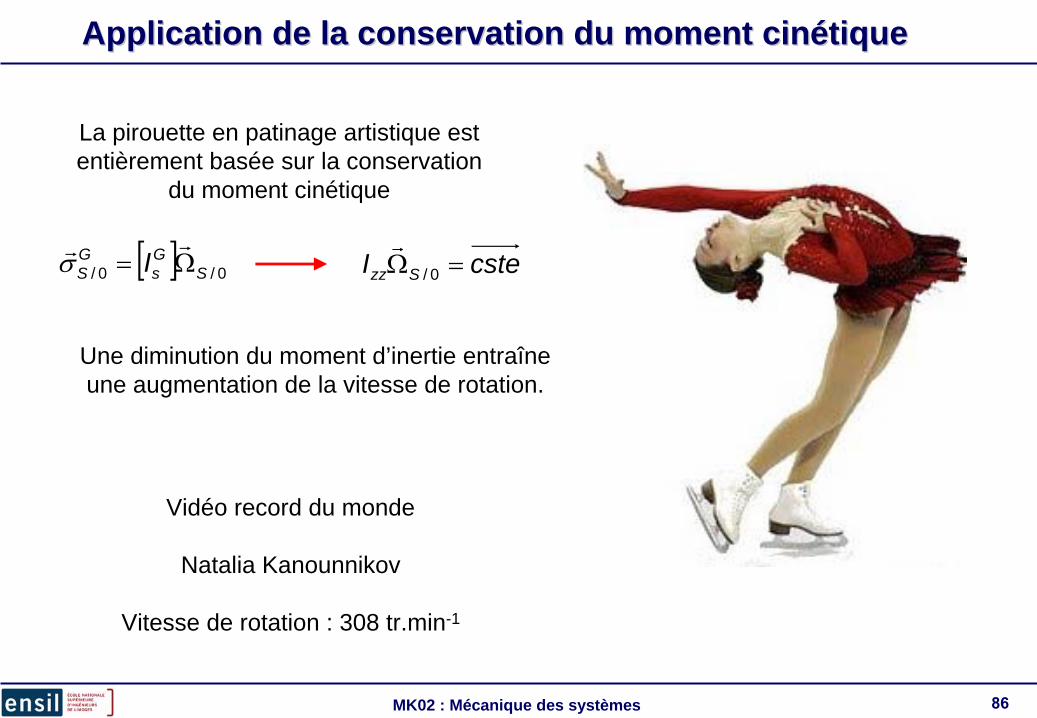
Application de la conservation du moment cinApplication de la conservation du moment cinéétique tique
La pirouette en patinage artistique est entièrement basée sur la conservation
du moment cinétique
Vidéo record du monde
Natalia Kanounnikov
Vitesse de rotation : 308 tr.min-1
[ ] 0/0/ SGs
GS I Ω=
rrσ csteI Szz =Ω 0/
r
Une diminution du moment d’inertie entraîne une augmentation de la vitesse de rotation.
87MK02 : Mécanique des systèmes
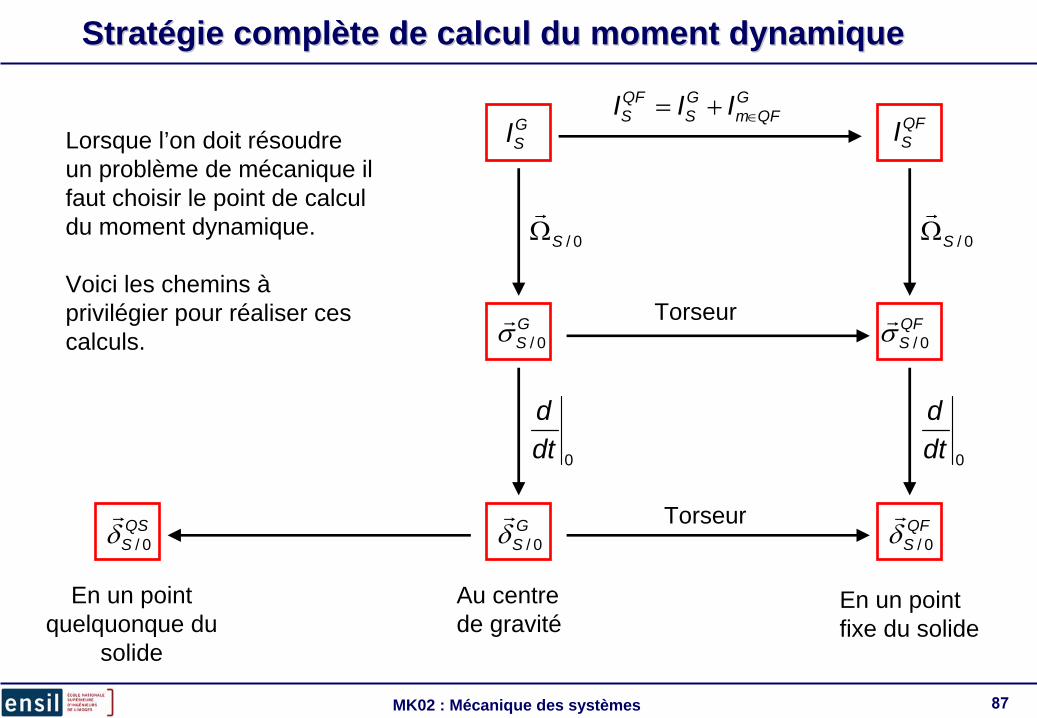
StratStratéégie complgie complèète de calcul du moment dynamiquete de calcul du moment dynamique
QFSI
GS 0/σr QF
S 0/σr
GS 0/δr
QFS 0/δr
GSI
GQFm
GS
QFS III ∈+=
Au centre de gravité
En un point fixe du solide
En un point quelquonque du
solide
0/SΩr
0/SΩr
0dtd
0dtd
Torseur
TorseurQSS 0/δr
Lorsque l’on doit résoudre un problème de mécanique il faut choisir le point de calcul du moment dynamique.
Voici les chemins àprivilégier pour réaliser ces calculs.
88MK02 : Mécanique des systèmes
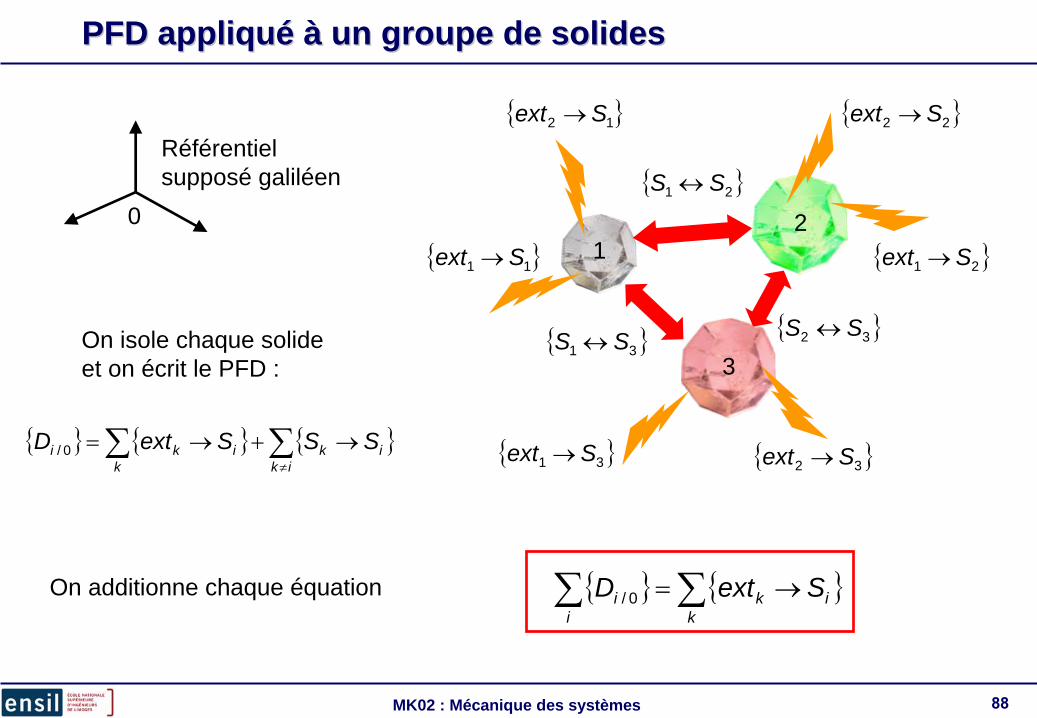
PFD appliquPFD appliquéé àà un groupe de solidesun groupe de solides
12
3
{ }31 Sext → { }32 Sext →
{ }11 Sext →
{ }12 Sext → { }22 Sext →
{ }21 Sext →
On isole chaque solide et on écrit le PFD :
{ }31 SS ↔
{ }21 SS ↔
{ }32 SS ↔
{ } { } { }∑∑≠
→+→=ik
ikk
iki SSSextD 0/
Référentiel supposé galiléen
0
On additionne chaque équation { } { }∑∑ →=k
iki
i SextD 0/

89MK02 : Mécanique des systèmes
Retour sur la thRetour sur la thééorie des morie des méécanismescanismes
0
1
3 4
2
On part du graphe des liaisons
On compte le nombre d’inconnues statiques de liaison : ∑= SS iI
On compte le nombre d’équations statiques : )1(6 −= PS NE
On compte le nombre de pièces isolables (toutes or bâti) : )1( −PN
90MK02 : Mécanique des systèmes
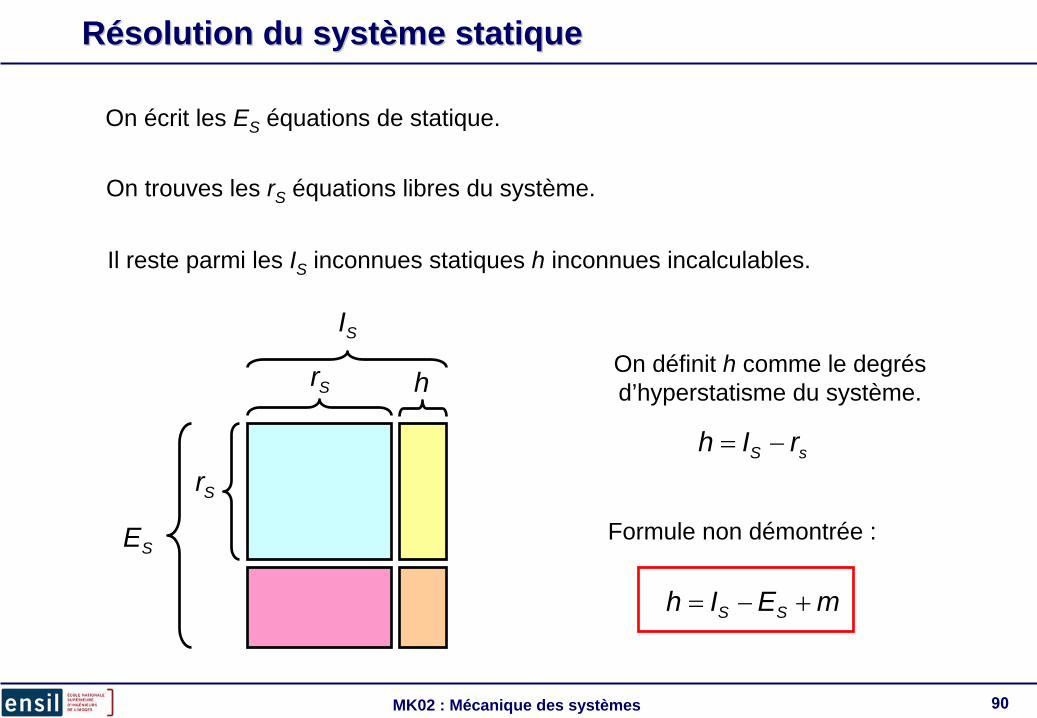
RRéésolution du systsolution du systèème statiqueme statique
Sr
Sr
SE
SI
On écrit les ES équations de statique.
h
On trouves les rS équations libres du système.
Il reste parmi les IS inconnues statiques h inconnues incalculables.
On définit h comme le degrés d’hyperstatisme du système.
mEIh SS +−=
Formule non démontrée :
sS rIh −=
91MK02 : Mécanique des systèmes
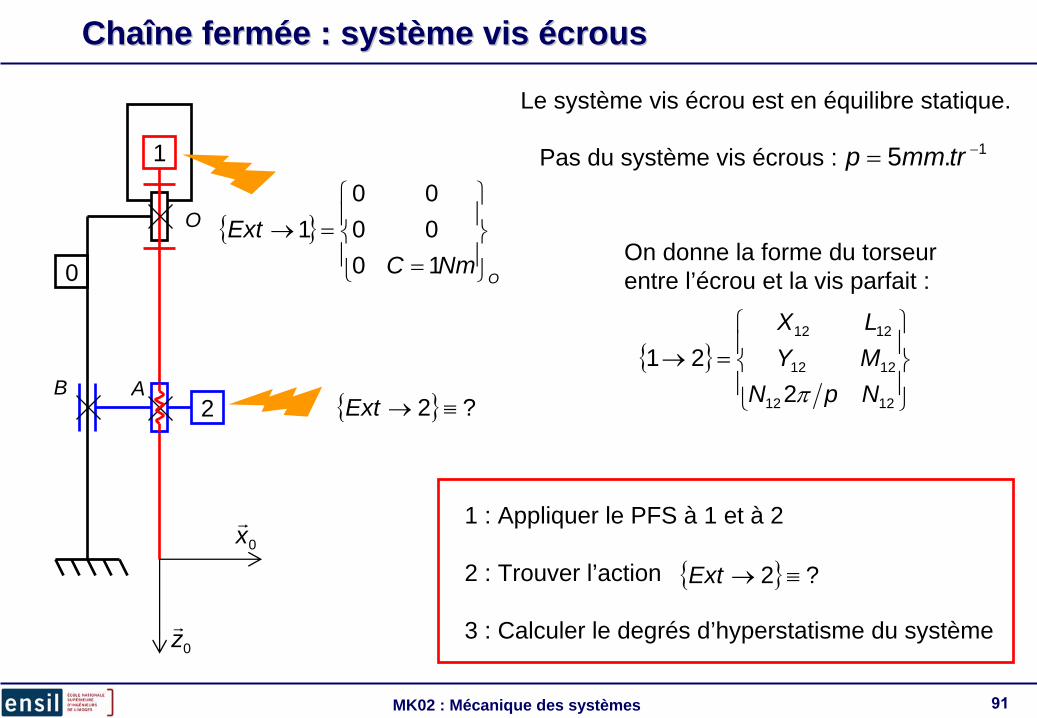
ChaChaîîne fermne ferméée : syste : systèème vis me vis éécrouscrous
1
0
2
1 : Appliquer le PFS à 1 et à 2
2 : Trouver l’action
3 : Calculer le degrés d’hyperstatisme du système0zr
0xr
O
AB
Pas du système vis écrous : 1.5 −= trmmp
{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=→
12
12
12
12
12
12
221
NML
pNYX
π
{ }O
NmCExt
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
==→
100
000
1
{ } ?2 ≡→Ext
On donne la forme du torseur entre l’écrou et la vis parfait :
Le système vis écrou est en équilibre statique.
{ } ?2 ≡→Ext
92MK02 : Mécanique des systèmes
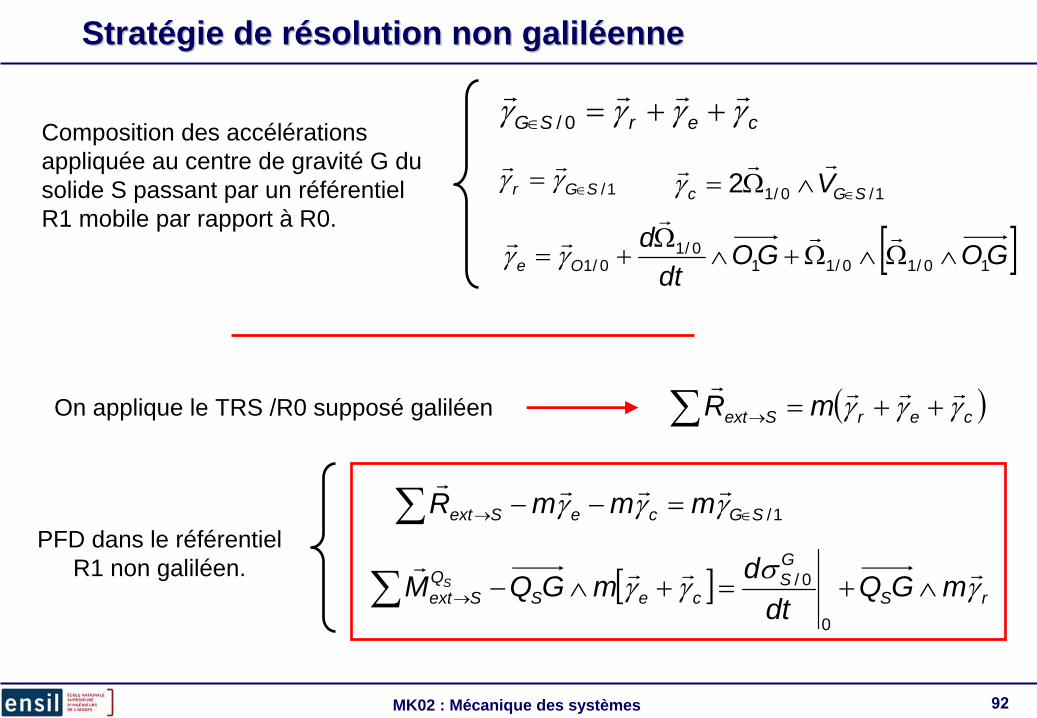
StratStratéégie de rgie de réésolution non galilsolution non galilééenneenne
1/SGr ∈= γγrr
[ ]GOGOdt
dOe 10/10/11
0/10/1 ∧Ω∧Ω+∧
Ω+=
rrr
rrγγ
cerSG γγγγrrrr
++=∈ 0/
1/0/12 SGc V ∈∧Ω=rrr
γ
Composition des accélérations appliquée au centre de gravité G du solide S passant par un référentiel R1 mobile par rapport à R0.
( )cerSext mR γγγrrrr
++=∑ →On applique le TRS /R0 supposé galiléen
1/SGceSext mmmR ∈→ =−−∑ γγγrrrr
[ ] rS
GS
ceSQ
Sext mGQdt
dmGQM S γσγγrrrr
∧+=+∧−∑ →
0
0/
PFD dans le référentiel R1 non galiléen.
93MK02 : Mécanique des systèmes
StratStratéégie de rgie de réésolutionsolution
4 : Choix du point de réduction pour appliquer le TMD.
1 : Paramétrage du problème
3 : Choix du groupe de solides à isoler
2 : Choix du référentiel pour la résolution (galiléen / non galiléen)
5 : Choix du cheminement pour calculer du moment dynamique
Prise en compte des roulements sans glissement
Résolution cinématique si possible
Schémas des rotations
Calcul du degrés d’hyperstatisme si possible
















![[XLS]fmism.univ-guelma.dzfmism.univ-guelma.dz/sites/default/files/le fond... · Web view1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1](https://img.pdfslide.fr/doc/110x75/5b9d17e509d3f2194e8d827e/xlsfmismuniv-fond-web-view1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1.jpg)