Embed Size (px)
Citation preview
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ENSTA - COURSMS 204DYNAMIQUE DES SYSTÈMES MÉCANIQUES:
ONDES ET VIBRATIONS
Amphi 6
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RAPPEL
Mise en ligne des documents :PC 5 :Les fichiers .m matlab dont le corrigé : TD5d.m:http://www.ensta-paristech.fr/∼touze/MS204/PC5
Amphi + examens pour révisions :http://www.ensta-paristech.fr/∼touze/MS204/
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
RAPPELS DE COURS
Dynamique des systèmes mécaniques :gouvernée par des EDP du type:
∀ x ∈ Ω, ∀ t :∂2w∂t2 + L(w(x , t)) = 0
Milieu infini : Formalisme des ondes :
w(x , t) = ei(kx−ωt)
Clé de la résolution : variable x − ct . Relation de dispersion .(Lien entre les mouvements temporels et spatiaux).
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
RAPPELS
Milieu fini :
∀ x ∈ Ω, ∀ t :∂2w∂t2 + L(w(x , t)) = 0.
∀ x ∈ ∂Ω, ∀ t : Bi(w(x , t)) = 0, i = 1... p.
Résolution du problème spatial : Calcul des modes propres : déformées modales + fréquences
propres Projection modale : w(x , t) =
∑+∞
n=1 Xp(t)φp(x). Problème temporel : oscillateurs découplés
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
RAPPELS
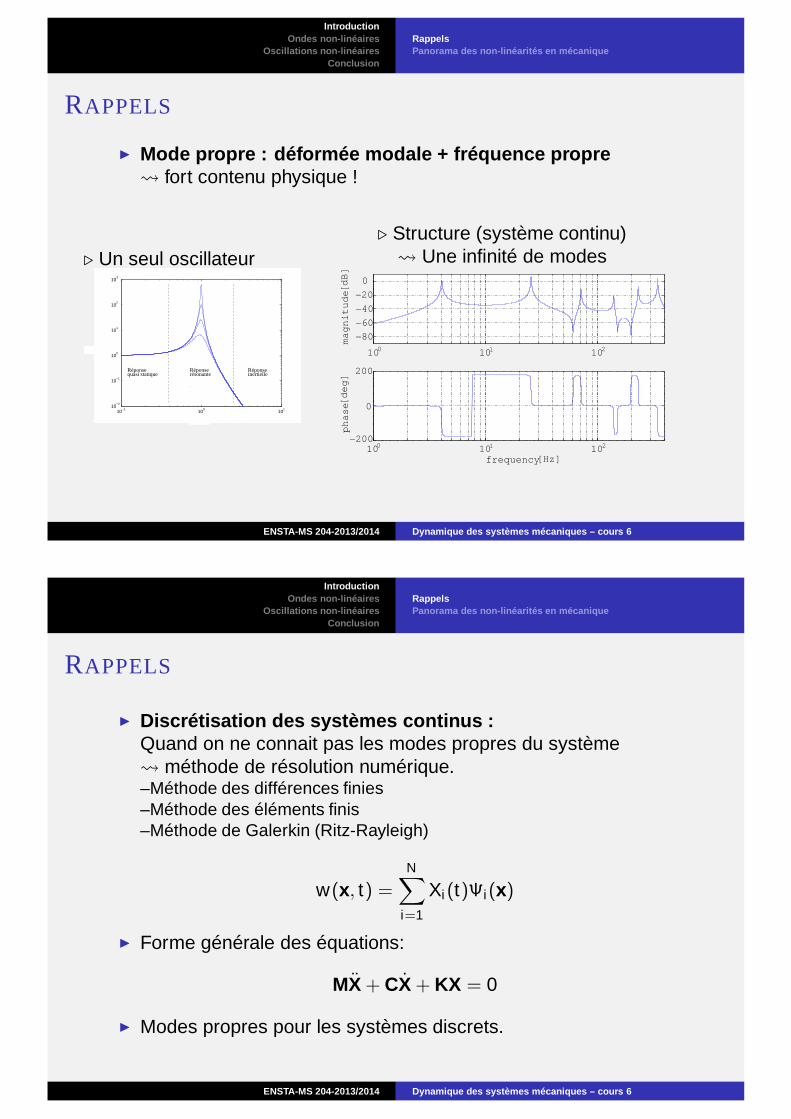
Mode propre : déformée modale + fréquence propre fort contenu physique !
⊲ Un seul oscillateur
10−1
100
101
10−2
10−1
100
101
102
103
PSzeta1
PSzeta2
PSzeta3
PSzeta4
PSH2
PSz
Réponsequasi statique
Réponserésonante
Réponseinertielle
PSeq1 PSeq2 PSeq3
⊲ Structure (système continu) Une infinité de modes
magnitude[dB]
frequency[Hz]
phase[deg]
100 101 102
100 101 102
−200
0
200
−80
−60
−40
−20
0
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
RAPPELS
Discrétisation des systèmes continus :Quand on ne connait pas les modes propres du système méthode de résolution numérique.–Méthode des différences finies–Méthode des éléments finis–Méthode de Galerkin (Ritz-Rayleigh)
w(x, t) =N∑
i=1
Xi (t)Ψi(x)
Forme générale des équations:
MX + CX + KX = 0
Modes propres pour les systèmes discrets.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
EFFETS NON-LINÉAIRES
Dans tout ce qui a été montré :Hypothèse Majeure :l’amplitude des mouvements considérés est petite
EDP linéaires .
But de ce cours : lever cette hypothèse.
Plan:– Classification des non-linéarités en mécanique.– Ondes non-linéaires.– Vibrations non-linéaires.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
CLASSIFICATION DES NON-LINÉARITÉS
Non-linéarité de comportement :Lorsque la loi de comportement n’est plus linéaire.
Non-linéarité d’amplitude :Lorsque les amplitudes du mouvement sont grandes :relation non-linéaire entre les déplacements et les déformations.
Discontinuités et interfaces :Discontinuités, chocs, ...Non-linéarité non-régulière.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
NON-LINÉARITÉS DE COMPORTEMENT
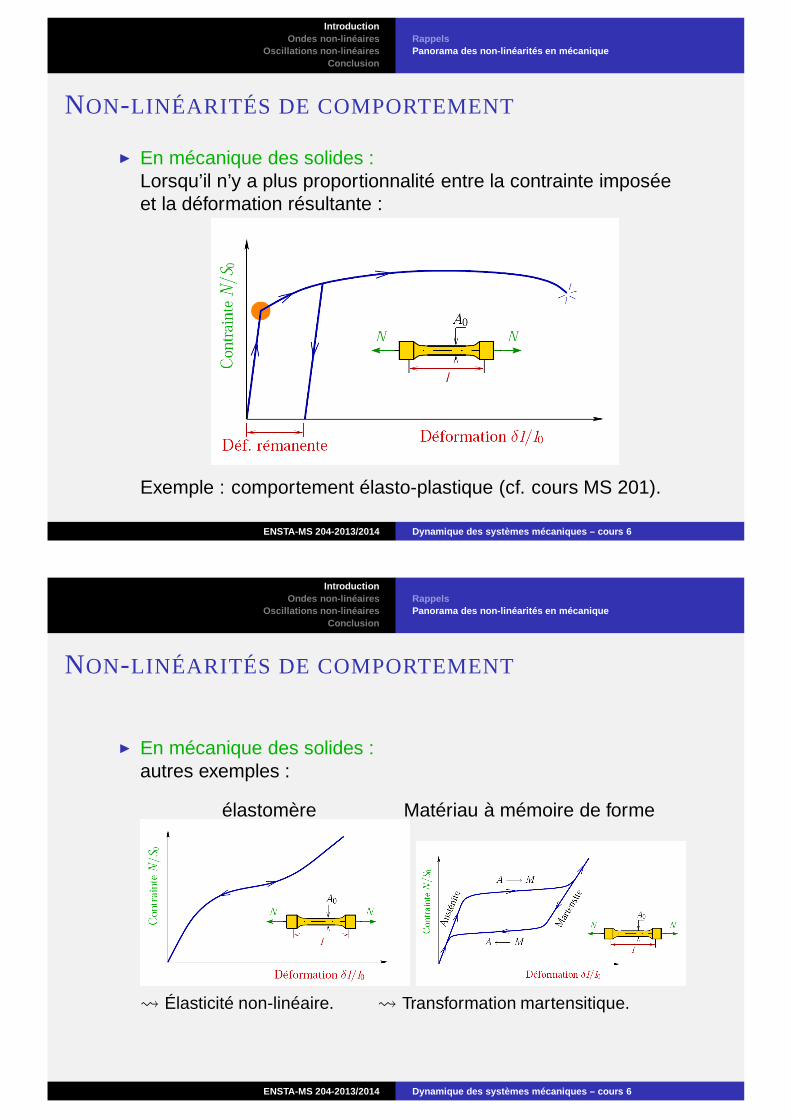
En mécanique des solides :Lorsqu’il n’y a plus proportionnalité entre la contrainte imposéeet la déformation résultante :
Exemple : comportement élasto-plastique (cf. cours MS 201).
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
NON-LINÉARITÉS DE COMPORTEMENT
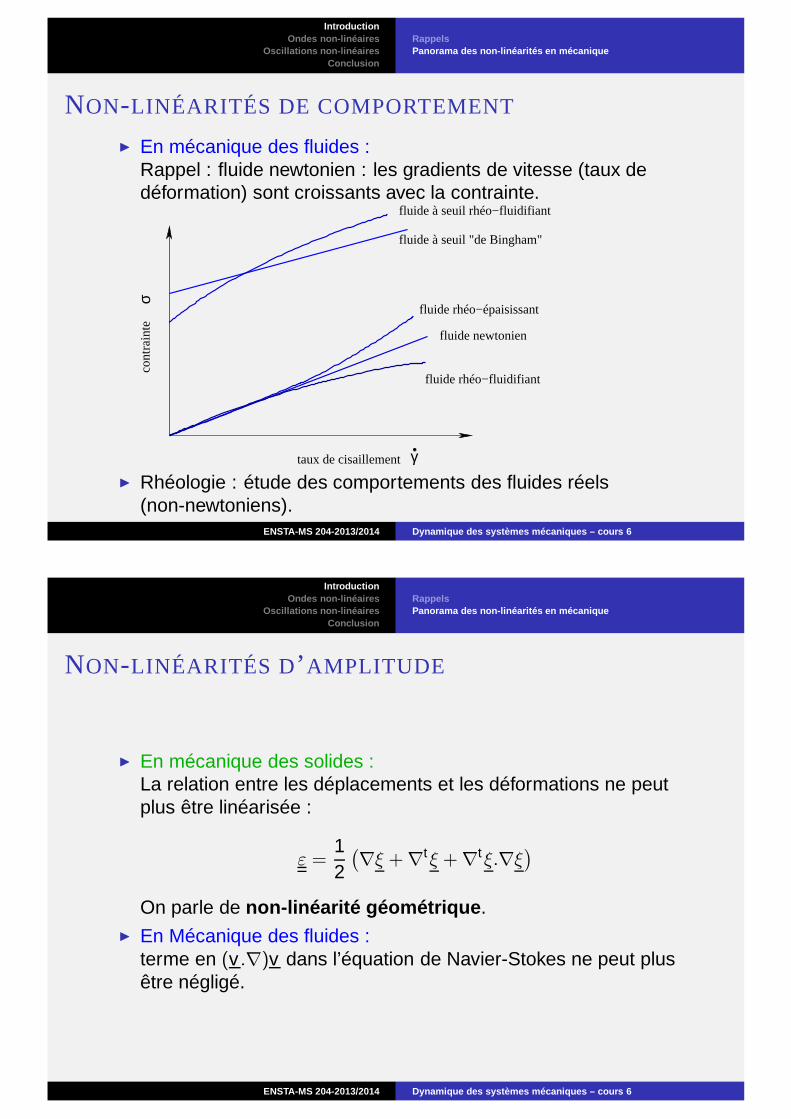
En mécanique des solides :autres exemples :
élastomère Matériau à mémoire de forme
Élasticité non-linéaire. Transformation martensitique.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
NON-LINÉARITÉS DE COMPORTEMENT
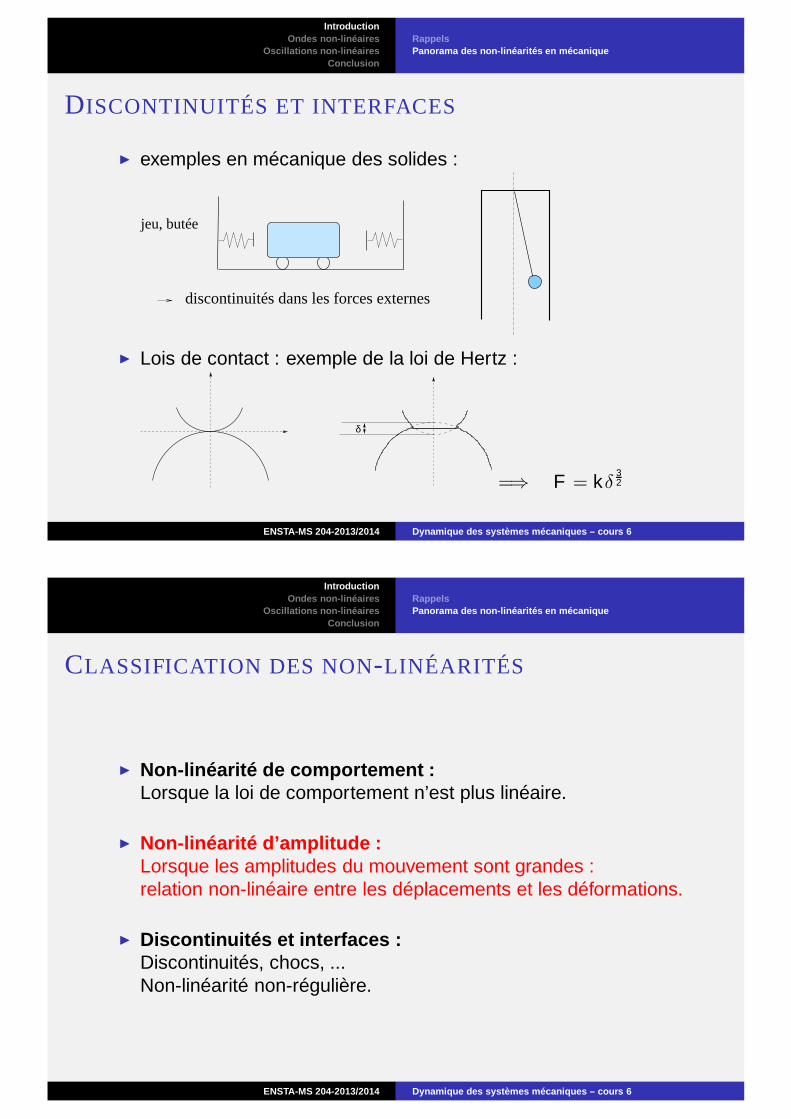
En mécanique des fluides :Rappel : fluide newtonien : les gradients de vitesse (taux dedéformation) sont croissants avec la contrainte.
fluide à seuil rhéo−fluidifiant
fluide à seuil "de Bingham"
fluide newtonien
fluide rhéo−épaisissant
fluide rhéo−fluidifiant
γtaux de cisaillement
cont
rain
teσ
Rhéologie : étude des comportements des fluides réels(non-newtoniens).
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
NON-LINÉARITÉS D’ AMPLITUDE
En mécanique des solides :La relation entre les déplacements et les déformations ne peutplus être linéarisée :
ε =12
(
∇ξ +∇tξ +∇tξ.∇ξ)
On parle de non-linéarité géométrique . En Mécanique des fluides :
terme en (v .∇)v dans l’équation de Navier-Stokes ne peut plusêtre négligé.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
DISCONTINUITÉS ET INTERFACES
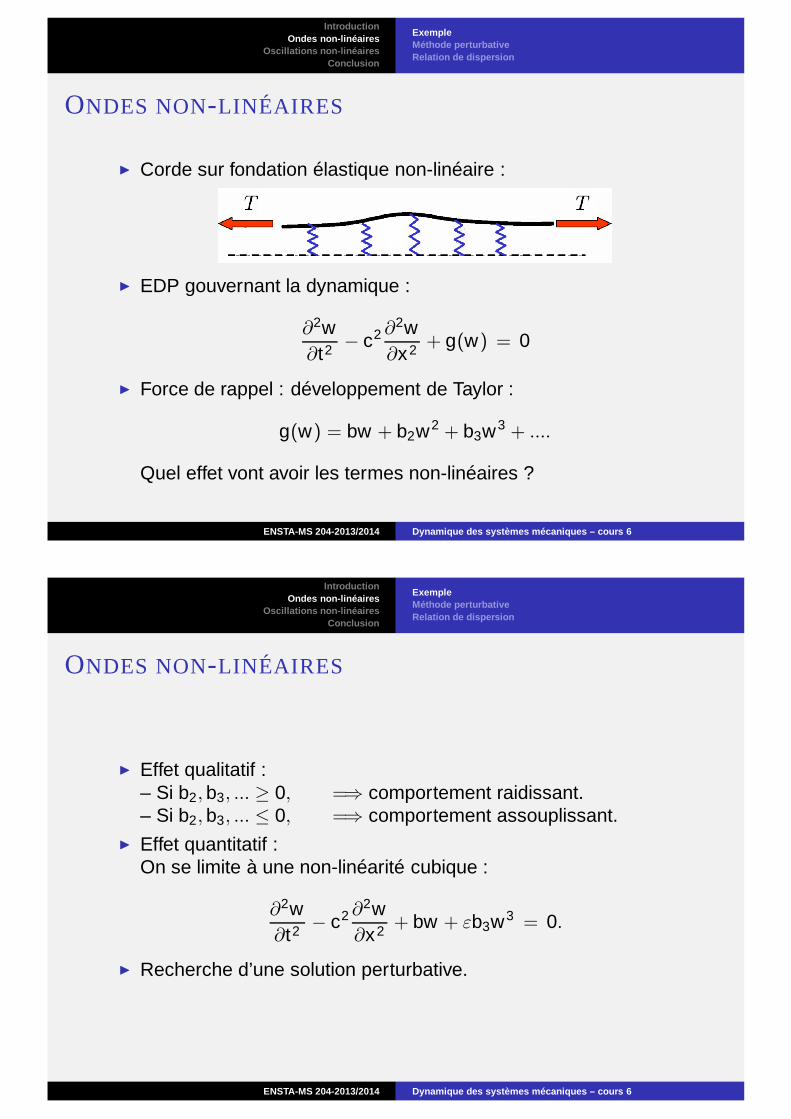
exemples en mécanique des solides :
discontinuités dans les forces externes
jeu, butée
Lois de contact : exemple de la loi de Hertz :
δ
=⇒ F = kδ32
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
RappelsPanorama des non-linéarités en mécanique
CLASSIFICATION DES NON-LINÉARITÉS
Non-linéarité de comportement :Lorsque la loi de comportement n’est plus linéaire.
Non-linéarité d’amplitude :Lorsque les amplitudes du mouvement sont grandes :relation non-linéaire entre les déplacements et les déformations.
Discontinuités et interfaces :Discontinuités, chocs, ...Non-linéarité non-régulière.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ExempleMéthode perturbativeRelation de dispersion
ONDES NON-LINÉAIRES
Corde sur fondation élastique non-linéaire :
EDP gouvernant la dynamique :
∂2w∂t2 − c2 ∂
2w∂x2 + g(w) = 0
Force de rappel : développement de Taylor :
g(w) = bw + b2w2 + b3w3 + ....
Quel effet vont avoir les termes non-linéaires ?
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ExempleMéthode perturbativeRelation de dispersion
ONDES NON-LINÉAIRES
Effet qualitatif :– Si b2, b3, ... ≥ 0, =⇒ comportement raidissant.– Si b2, b3, ... ≤ 0, =⇒ comportement assouplissant.
Effet quantitatif :On se limite à une non-linéarité cubique :
∂2w∂t2 − c2 ∂
2w∂x2 + bw + εb3w3 = 0.
Recherche d’une solution perturbative.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ExempleMéthode perturbativeRelation de dispersion
ONDES NON-LINÉAIRES : SOLUTION PERTURBATIVE
On pose, pour le déplacement w :développement de Taylor de termes propagatifs :
w(x , t) = w0(kx − ωt) + εw1(kx − ωt) + ...
La relation de dispersion sera modifiée :
ω2 − c2k2 = b + εδ,
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ExempleMéthode perturbativeRelation de dispersion
ONDES NON-LINÉAIRES : SOLUTION PERTURBATIVE
Développant et regroupant les puissances de ε :
w ′′0 + w0 = 0
b(w ′′1 + w1) + b3w3
0 + δw ′′0 = 0
solution à l’ordre ε0 :
w0(z) = A cos(z), avec z = kx − ωt .
En reportant à l’ordre ε :
b(w ′′1 + w1) =
[
−34
b3A3 + δA]
cos(z)−14
b3A3 cos 3z
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
ExempleMéthode perturbativeRelation de dispersion
ONDES NON-LINÉAIRES : SOLUTION PERTURBATIVE
Solution à l’ordre ε :on doit absolument annuler le terme résonnant pour obtenir unesolution acceptable physiquement. D’où :
δ =34
b3A2.
Conséquence : la relation de dispersion dépend del’amplitude A !
ω2 − c2k2 = b +3ε4
b3A2
Vitesse de phase :
cφ =ω
k= c
√
1 +b
k2c2 +3εb3A2
4k2c2 .
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
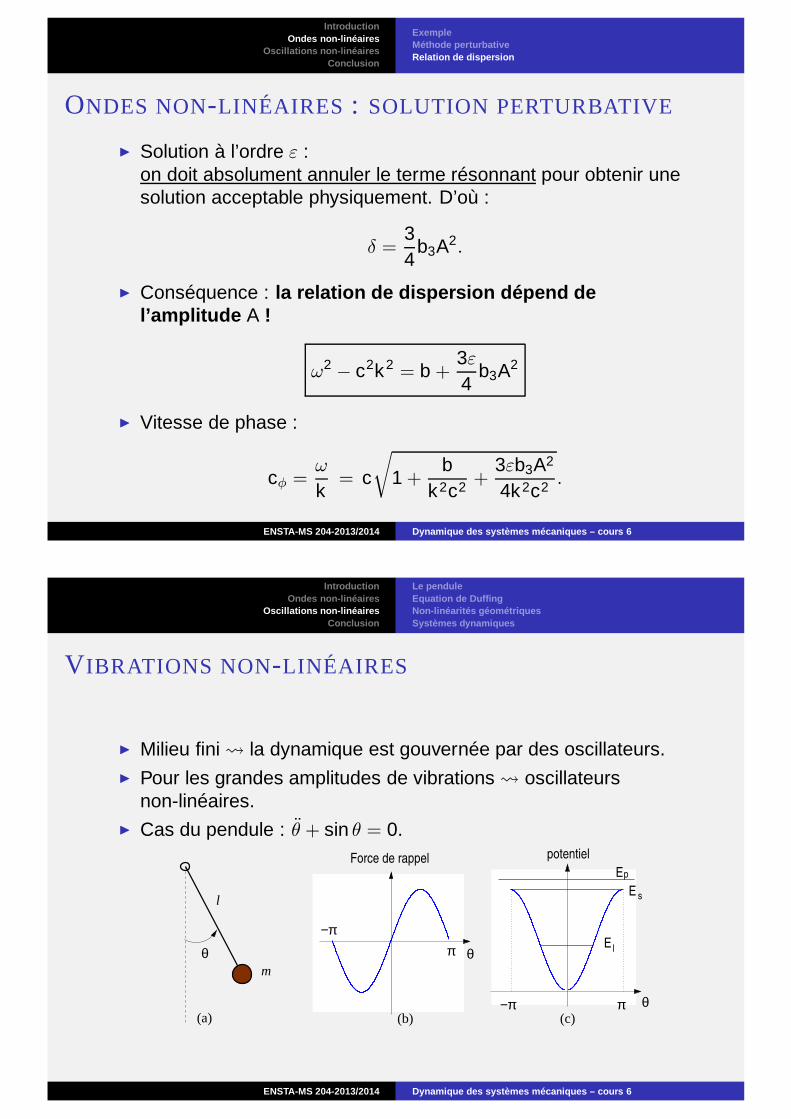
V IBRATIONS NON-LINÉAIRES
Milieu fini la dynamique est gouvernée par des oscillateurs. Pour les grandes amplitudes de vibrations oscillateurs
non-linéaires. Cas du pendule : θ + sin θ = 0.
θ
θ
θ
l
m
Force de rappel potentiel
E
E
E
p
s
l
(a) (b) (c)−π π
−ππ
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
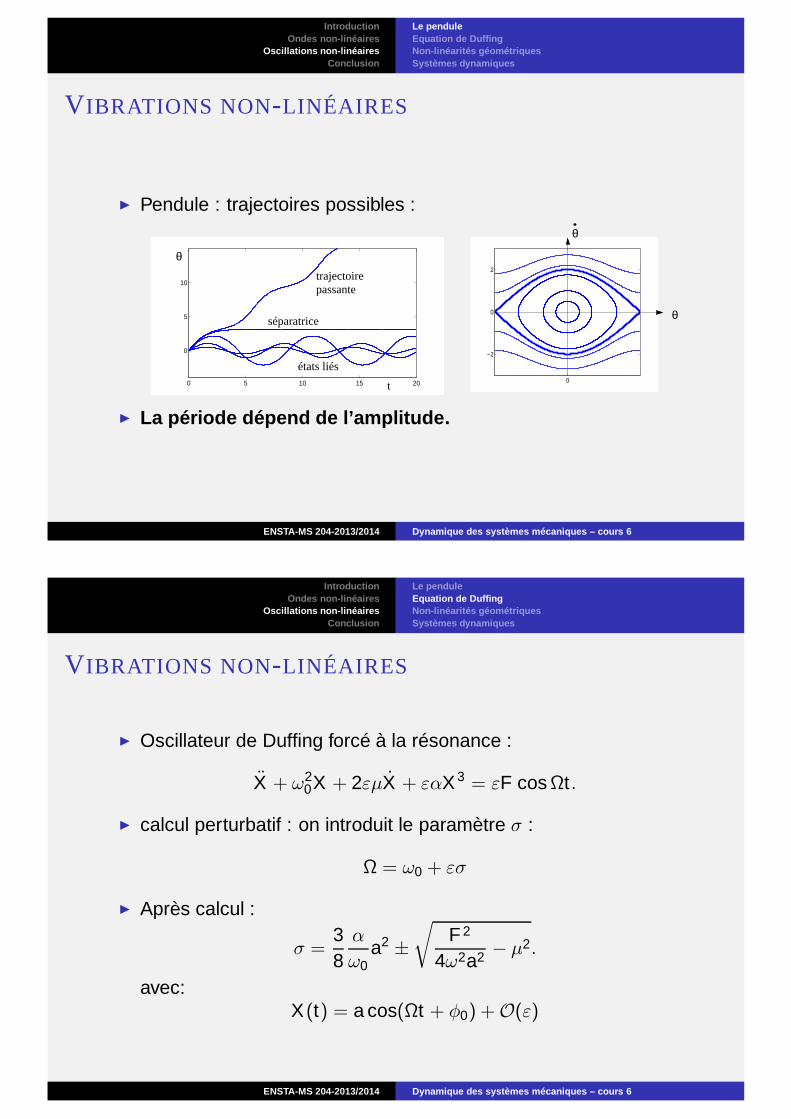
V IBRATIONS NON-LINÉAIRES
Pendule : trajectoires possibles :
0 5 10 15 20
0
5
10
0
−2
0
2trajectoirepassante
états liés
séparatrice
θ
θ
θ
t
La période dépend de l’amplitude.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
V IBRATIONS NON-LINÉAIRES
Oscillateur de Duffing forcé à la résonance :
X + ω20X + 2εµX + εαX3 = εF cosΩt .
calcul perturbatif : on introduit le paramètre σ :
Ω = ω0 + εσ
Après calcul :
σ =38α
ω0a2 ±
√
F 2
4ω2a2 − µ2.
avec:X(t) = a cos(Ωt + φ0) +O(ε)
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
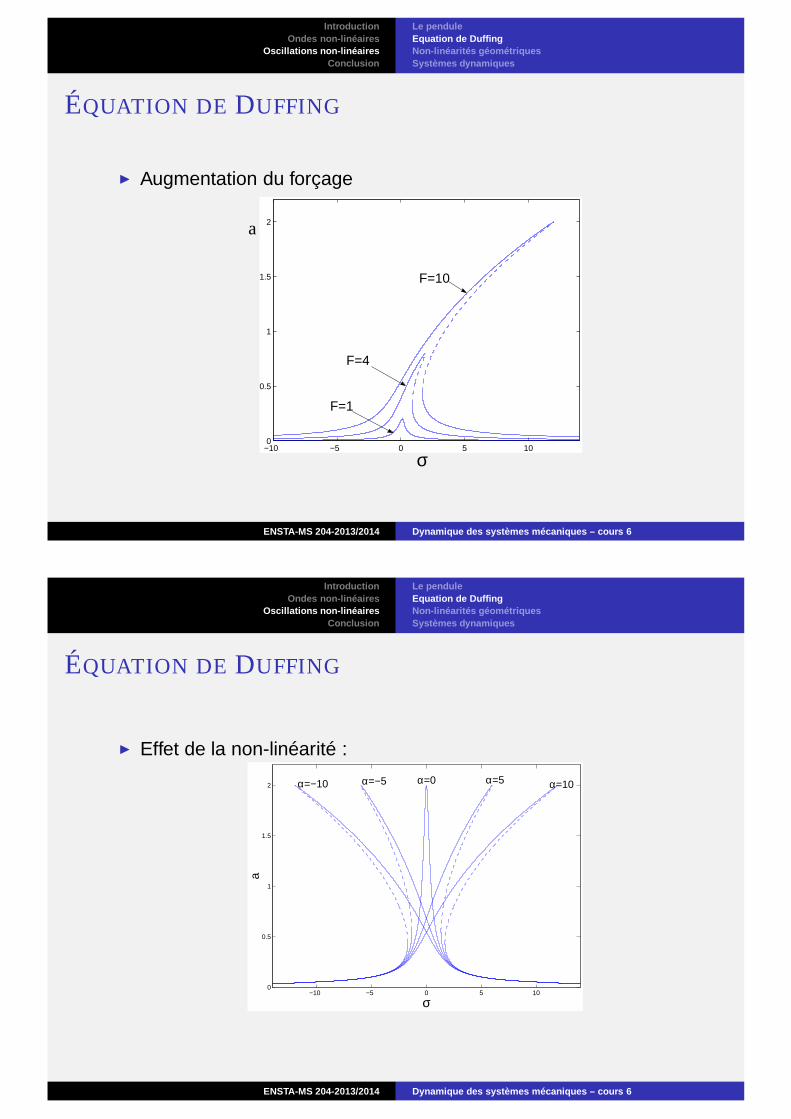
ÉQUATION DE DUFFING
Augmentation du forçage
−10 −5 0 5 100
0.5
1
1.5
2
F=1
F=4
F=10
σ
a
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
ÉQUATION DE DUFFING
Effet de la non-linéarité :
−10 −5 0 5 100
0.5
1
1.5
2
σ
a
α=−10 α=−5 α=0 α=5 α=10
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
ÉQUATION DE DUFFING
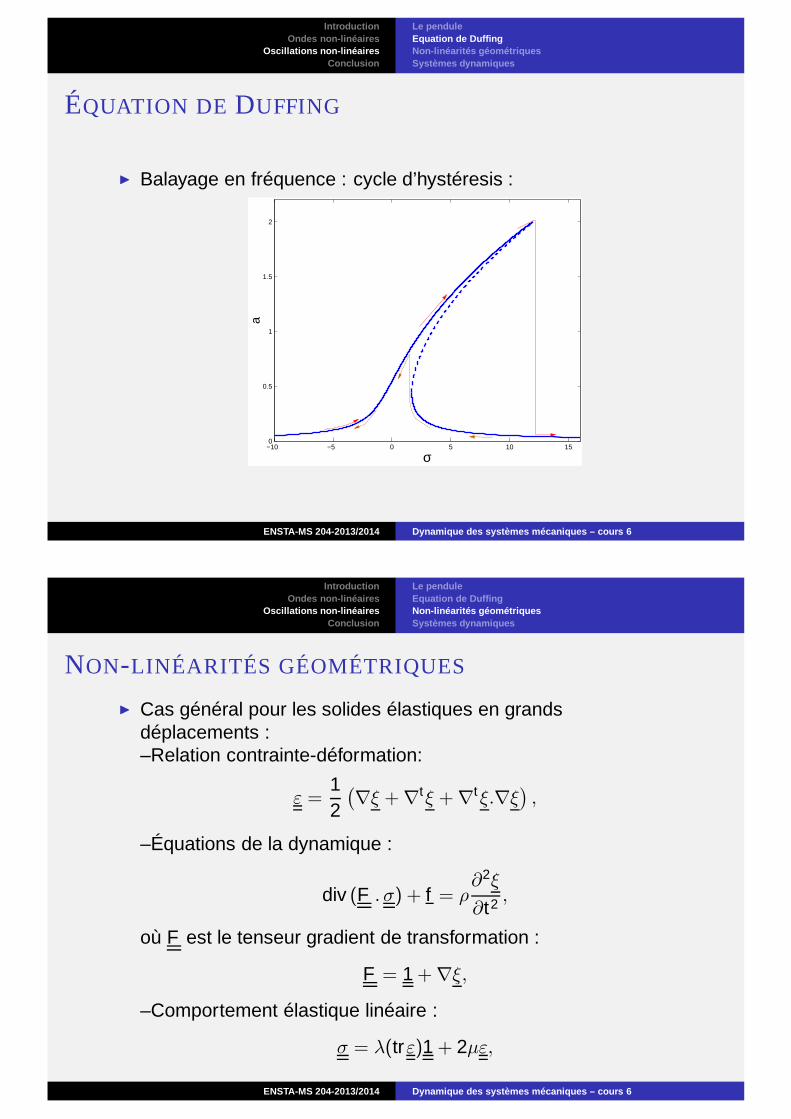
Balayage en fréquence : cycle d’hystéresis :
−10 −5 0 5 10 150
0.5
1
1.5
2
σ
a
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
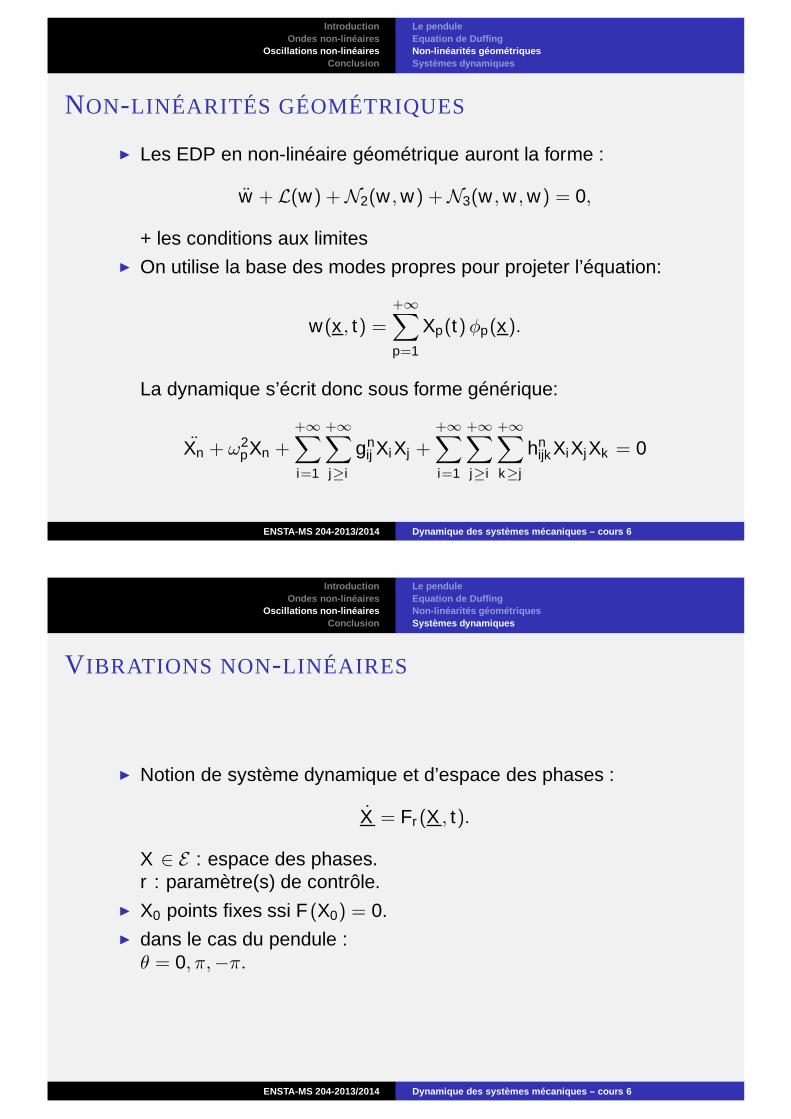
NON-LINÉARITÉS GÉOMÉTRIQUES
Cas général pour les solides élastiques en grandsdéplacements :–Relation contrainte-déformation:
ε =12
(
∇ξ +∇tξ +∇tξ.∇ξ)
,
–Équations de la dynamique :
div (F . σ) + f = ρ∂2ξ
∂t2 ,
où F est le tenseur gradient de transformation :
F = 1 +∇ξ,
–Comportement élastique linéaire :
σ = λ(trε)1 + 2µε,
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
NON-LINÉARITÉS GÉOMÉTRIQUES
Les EDP en non-linéaire géométrique auront la forme :
w + L(w) +N2(w ,w) +N3(w ,w ,w) = 0,
+ les conditions aux limites On utilise la base des modes propres pour projeter l’équation:
w(x , t) =+∞∑
p=1
Xp(t)φp(x).
La dynamique s’écrit donc sous forme générique:
Xn + ω2pXn +
+∞∑
i=1
+∞∑
j≥i
gnij Xi Xj +
+∞∑
i=1
+∞∑
j≥i
+∞∑
k≥j
hnijk XiXjXk = 0
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
V IBRATIONS NON-LINÉAIRES
Notion de système dynamique et d’espace des phases :
X = Fr (X , t).
X ∈ E : espace des phases.r : paramètre(s) de contrôle.
X0 points fixes ssi F (X0) = 0. dans le cas du pendule :
θ = 0, π,−π.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6

IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
SYSTÈMES DYNAMIQUES
Stabilité des points fixes : Développement limité en X = X0 : Soit X = X0 + ξ. Alors :
ξ = Fr (X 0) +
[
∂Fr
∂X
]
X=X 0
ξ.
ξ =
[
∂Fr
∂X
]
X=X0
ξ.
La stabilité est donnée par les valeurs propres de la matricejacobienne .
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
SYSTÈMES DYNAMIQUES
Cas du pendule : valeurs propres à l’origine :
λ = ±i
oscillations autour de l’origine. En ±π, les valeurs propres valent (1,−1) :
points fixes instables.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
Le penduleEquation de DuffingNon-linéarités géométriquesSystèmes dynamiques
SYSTÈMES DYNAMIQUES
Notion de bifurcation : le système dynamique dépend deparamètres :
X = Fr (X , t).
quand r varie, la nature des points fixes peut changer: bifurcation.
Etude des bifurcations en regardant comment les valeurspropres de la matrice jacobienne varient avec r .
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6
IntroductionOndes non-linéaires
Oscillations non-linéairesConclusion
CONCLUSION
Non-linéarité d’amplitude : La relation de dispersion dépend de l’amplitude. La période des oscillations dépend de l’amplitude.
D’autres solutions apparaissent : solutions multiples, hystéresis,bifurcations.
Formalisme mathématique adapté : théorie des systèmesdynamiques.
ENSTA-MS 204-2013/2014 Dynamique des systèmes mécaniques – cours 6





























