Embed Size (px)
Citation preview
Cinématique II –Cinématique du solide – Mouvements simples - p.1
CINEMATIQUE DU SOLIDE – MOUVEMENTS SIMPLES
I – Introduction
Une chaîne fonctionnelle est commandée pour satisfaire une fonction de service. L'actionneur vamettre en mouvement les pièces de la chaîne de solides. Les impératifs liés aux technologies utiliséesconduisent à choisir des lois de mouvement . Ces lois seront des compromis entre les performancesoptimales et les limites technologiques.
Dans tous les cas, l'étude cinématique au cours du temps d'une chaîne de solides nécessite laconnaissance des caractéristiques des mouvements des différents solides qui la composent. Cescaractéristiques correspondent aux trajectoires de certains points, à la vitesse et à l'accélération depoints appartenant aux solides. On définit un espace-temps (dimension 1) dont les points sont lesinstants t.
II – Quelques rappels de cinématique du point
1. Vecteur position
On peut toujours exprimer le vecteur position d'un point M par ses trois coordonnées dans un dessystèmes usuels de coordonnées : M(x,y,z), M(r,θ,z) ou M(r,θ, ϕ).
Dans une chaîne de solides, un point sera facilement repéré en utilisant les différentes grandeursliées au mécanisme : dimensions, position et orientation des solides. On cherchera toujours aexprimer le vecteur position de la manière la plus simple en utilisant ces données .
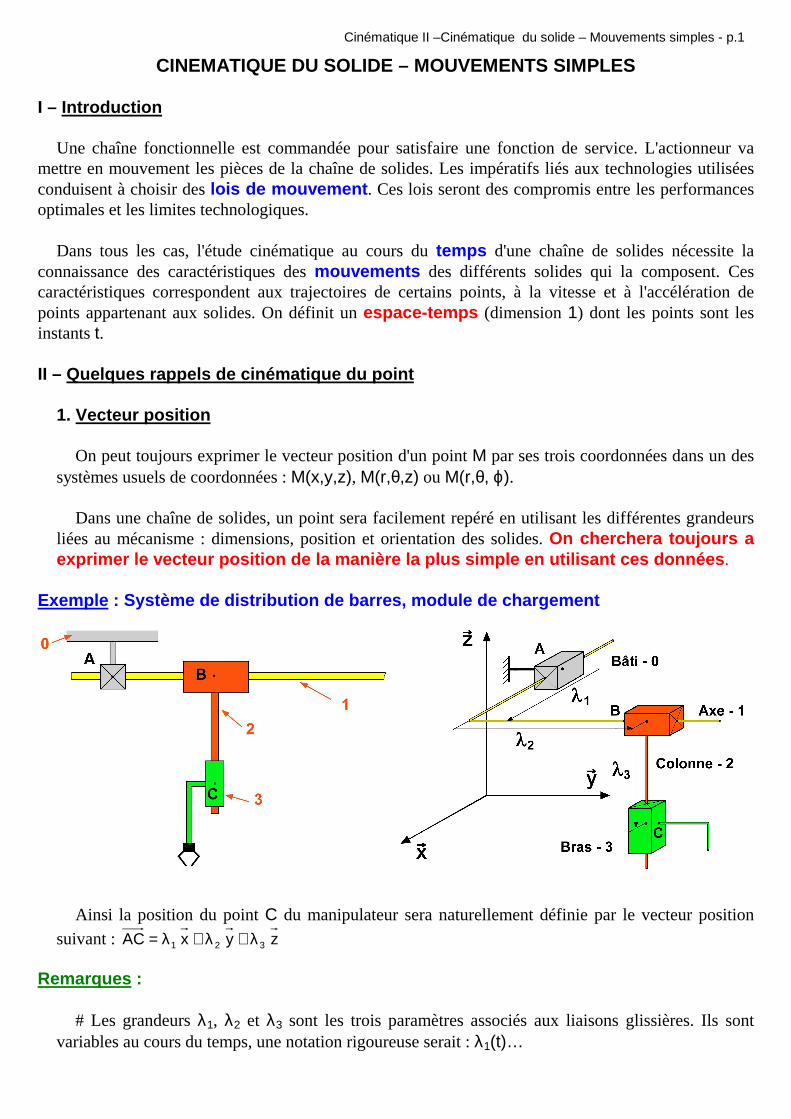
Exemple : Système de distribution de barres, module de chargement
Ainsi la position du point C du manipulateur sera naturellement définie par le vecteur position
suivant : z y x AC 321 λ+λ+λ=
Remarques :
# Les grandeurs λ1, λ2 et λ3 sont les trois paramètres associés aux liaisons glissières. Ils sontvariables au cours du temps, une notation rigoureuse serait : λ1(t)…
Cinématique II –Cinématique du solide – Mouvements simples - p.2
# Comme pour établir les figures de changement de base associées aux paramètres angulaires,pour le paramètre linéaire λ3 il est souhaitable de le considérer comme un scalaire, sur la figure il estnégatif.
Comme dans cet exemple ce paramètre sera toujours négatif, il est possible de le considérer en
valeur absolue, et intégrer le signe dans l'expression vectorielle ainsi : z BC 3λ−= avec λ3 > 0.
Mais en procédant ainsi Il faudra toujours être extrêmement prudent .
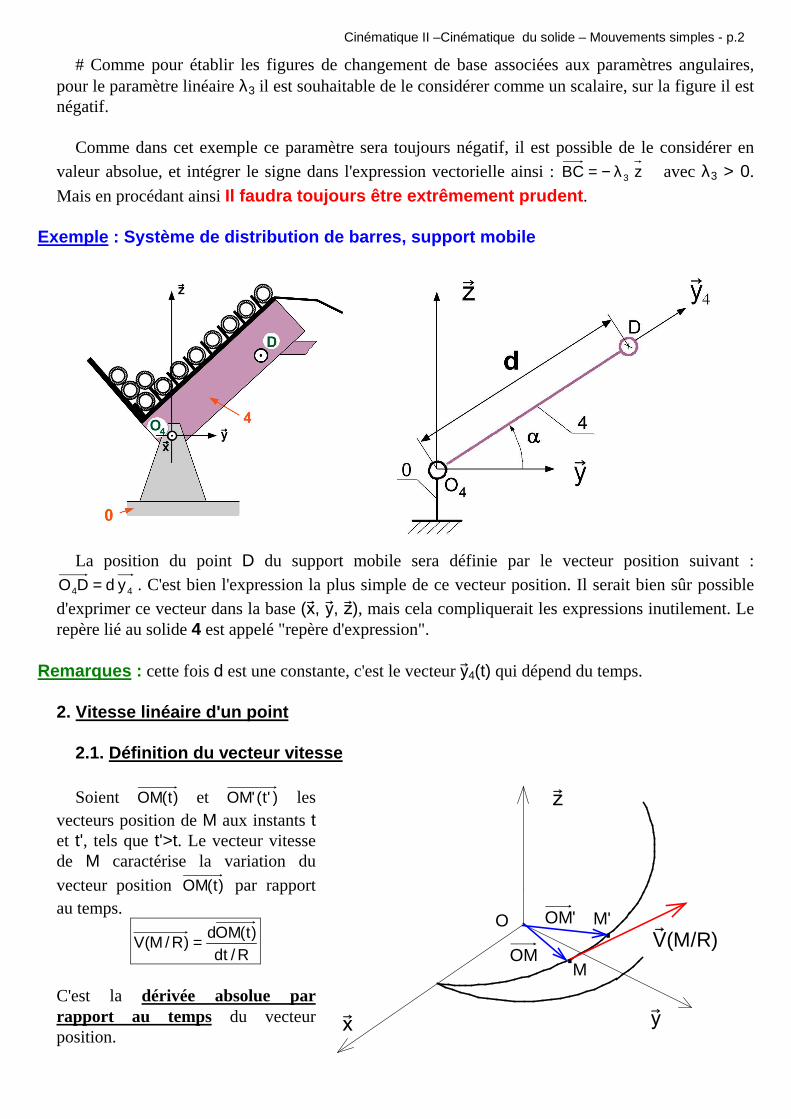
Exemple : Système de distribution de barres, suppor t mobile
La position du point D du support mobile sera définie par le vecteur position suivant :
44 y dDO = . C'est bien l'expression la plus simple de ce vecteur position. Il serait bien sûr possibled'exprimer ce vecteur dans la base (x, y, z), mais cela compliquerait les expressions inutilement. Lerepère lié au solide 4 est appelé "repère d'expression".
Remarques : cette fois d est une constante, c'est le vecteur y4(t) qui dépend du temps.
2. Vitesse linéaire d'un point
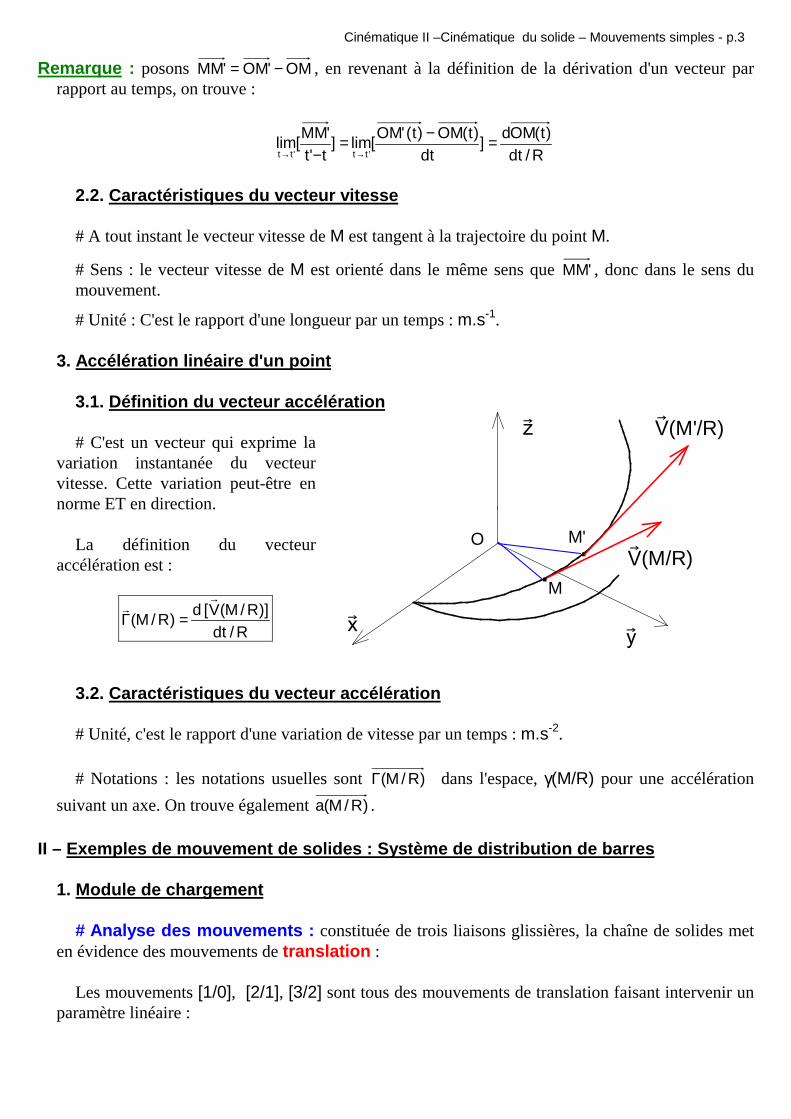
2.1. Définition du vecteur vitesse
Soient )t(OM et )'t('OM lesvecteurs position de M aux instants tet t', tels que t'>t. Le vecteur vitessede M caractérise la variation du
vecteur position )t(OM par rapportau temps.
R/dt)t(OMd
)R/M(V =
C'est la dérivée absolue parrapport au temps du vecteurposition.
OM
'OMV(M/R)
x
O
M
y
z
M'
..
Cinématique II –Cinématique du solide – Mouvements simples - p.3
Remarque : posons OM'OM'MM −= , en revenant à la définition de la dérivation d'un vecteur parrapport au temps, on trouve :
R/dt)t(OMd
]dt
)t(OM )t('OM[lim ]
t't'MM
[lim'tt'tt
=−=− →→
2.2. Caractéristiques du vecteur vitesse
# A tout instant le vecteur vitesse de M est tangent à la trajectoire du point M.
# Sens : le vecteur vitesse de M est orienté dans le même sens que 'MM , donc dans le sens dumouvement.
# Unité : C'est le rapport d'une longueur par un temps : m.s-1.
3. Accélération linéaire d'un point
3.1. Définition du vecteur accélération
# C'est un vecteur qui exprime lavariation instantanée du vecteurvitesse. Cette variation peut-être ennorme ET en direction.
La définition du vecteuraccélération est :
R/dt)]R/M(V[ d
)R/M(
rr
=Γ
z
V(M/R)
x
O
M
y
M'
..
V(M'/R)
3.2. Caractéristiques du vecteur accélération
# Unité, c'est le rapport d'une variation de vitesse par un temps : m.s-2.
# Notations : les notations usuelles sont )R/M(Γ dans l'espace, γ(M/R) pour une accélération
suivant un axe. On trouve également )R/M(a .
II – Exemples de mouvement de solides : Système de distribution de barres
1. Module de chargement
# Analyse des mouvements : constituée de trois liaisons glissières, la chaîne de solides meten évidence des mouvements de translation :
Les mouvements [1/0], [2/1], [3/2] sont tous des mouvements de translation faisant intervenir unparamètre linéaire :
Cinématique II –Cinématique du solide – Mouvements simples - p.4
[1/0] : translation suivant l'axe x, repérée par le paramètre λ1 ;
[2/1] : translation suivant l'axe y, repérée par le paramètre λ2 ;
[3/2] : translation suivant l'axe z, repérée par le paramètre λ3 ;
Si on considère le mouvement de [3/0], on constate qu'il s'agit d'une combinaison des troistranslations définies ci-dessus.
# Expression d'une vitesse d'un point : soit C point considéré lié au bras 3 , alors savitesse linéaire absolue (par rapport au référentiel d'observation fixe), par rapport au bâti 0 s'obtienten dérivant le vecteur position.
Repère d'observation fixe : R(A, x, y, z)
z y x R/dt
)z y x (dR/dt
)t(AC d)0/3C(V)0/3,C(V 321
321 λλλλλλ &&& ++=++==∈=
Remarques : la dérivation du vecteur est élémentaire, car les vecteurs de la base sont fixes.
# Expression d'une accélération d'un point :
z y x R/dt
)z y x (dR/dt
)0/3C(V d)0/3C()0/3,C( 321
321 λλλλλλ &&&&&&&&&
++=++=∈=∈Γ=Γ
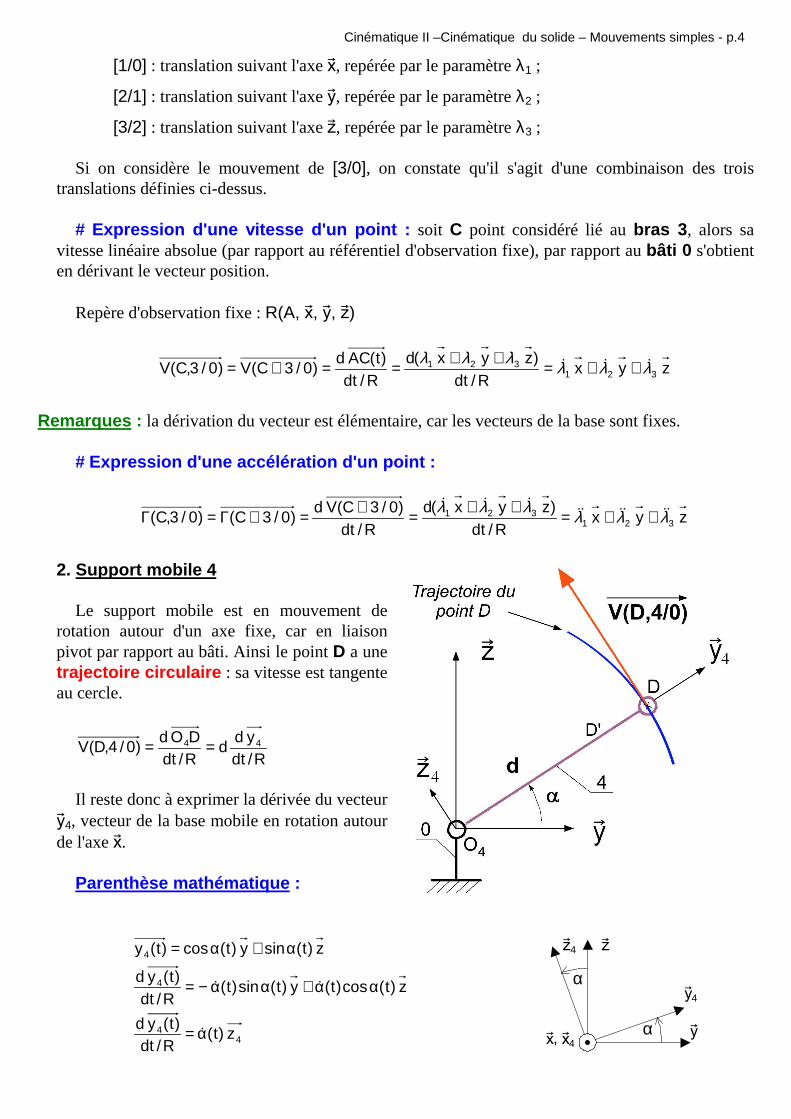
2. Support mobile 4
Le support mobile est en mouvement derotation autour d'un axe fixe, car en liaisonpivot par rapport au bâti. Ainsi le point D a unetrajectoire circulaire : sa vitesse est tangenteau cercle.
R/dty d
dR/dtDO d
)0/4,D(V 44 ==
Il reste donc à exprimer la dérivée du vecteury4, vecteur de la base mobile en rotation autourde l'axe x.
Parenthèse mathématique :
44
4
4
z )t( R/dt
)t(y d
z )t(cos)t(y )t(sin)t( R/dt
)t(y d
z )t(siny )t(cos)t(y
α=
αα+αα−=
α+α=
&
&&
α
z4
y
z
α
x, x4
y4
Cinématique II –Cinématique du solide – Mouvements simples - p.5
Remarques :
# Ce résultat est à connaître, il sera utilisé sans être redémontré.
# De la même manière on trouverait : 44 y )t( R/dt
)t(z d α&−=
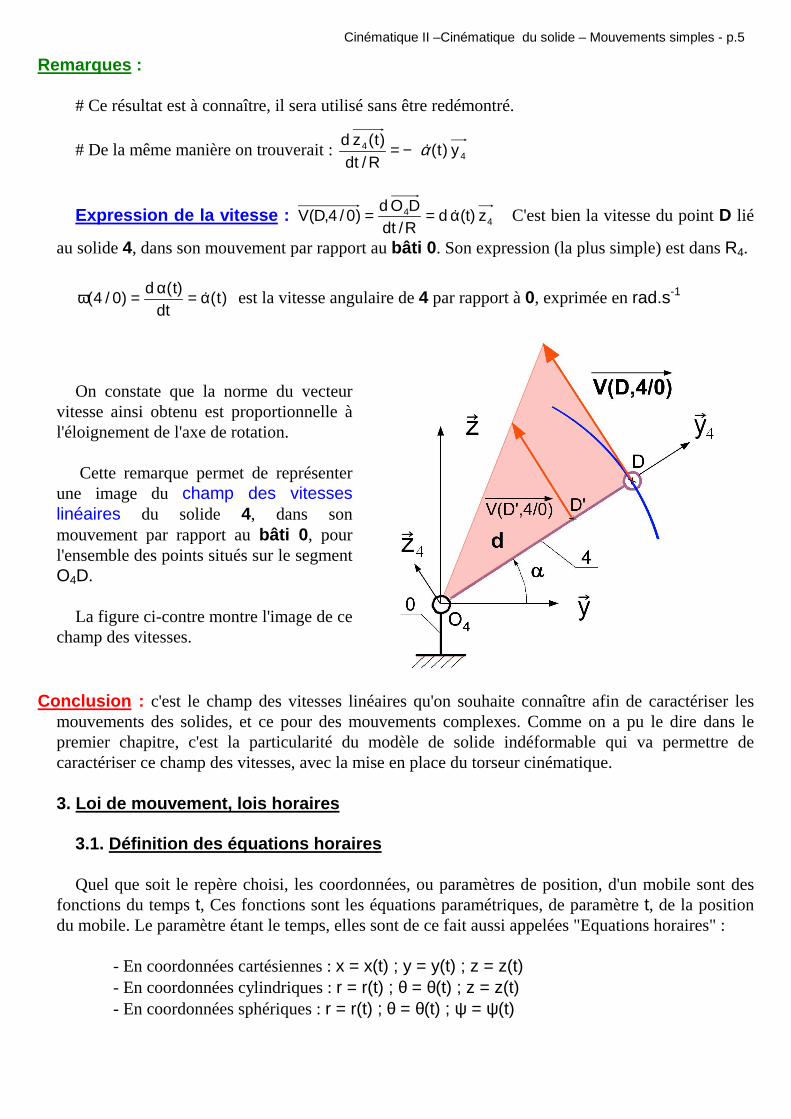
Expression de la vitesse : 44 z (t) dR/dtDO d
)0/4,D(V α== & C'est bien la vitesse du point D lié
au solide 4, dans son mouvement par rapport au bâti 0 . Son expression (la plus simple) est dans R4.
)t(dt
t)( d)0/4( α=α=ω & est la vitesse angulaire de 4 par rapport à 0, exprimée en rad.s-1
On constate que la norme du vecteurvitesse ainsi obtenu est proportionnelle àl'éloignement de l'axe de rotation.
Cette remarque permet de représenterune image du champ des vitesseslinéaires du solide 4, dans sonmouvement par rapport au bâti 0 , pourl'ensemble des points situés sur le segmentO4D.
La figure ci-contre montre l'image de cechamp des vitesses.
Conclusion : c'est le champ des vitesses linéaires qu'on souhaite connaître afin de caractériser lesmouvements des solides, et ce pour des mouvements complexes. Comme on a pu le dire dans lepremier chapitre, c'est la particularité du modèle de solide indéformable qui va permettre decaractériser ce champ des vitesses, avec la mise en place du torseur cinématique.
3. Loi de mouvement, lois horaires
3.1. Définition des équations horaires
Quel que soit le repère choisi, les coordonnées, ou paramètres de position, d'un mobile sont desfonctions du temps t, Ces fonctions sont les équations paramétriques, de paramètre t, de la positiondu mobile. Le paramètre étant le temps, elles sont de ce fait aussi appelées "Equations horaires" :
- En coordonnées cartésiennes : x = x(t) ; y = y(t) ; z = z(t)- En coordonnées cylindriques : r = r(t) ; θ = θ(t) ; z = z(t)- En coordonnées sphériques : r = r(t) ; θ = θ(t) ; ψ = ψ(t)

Cinématique II –Cinématique du solide – Mouvements simples - p.6
3.2. Exemple, loi de mouvement de l'axe 1 du module de chargement
On s'intéresse au déplacement en translation de l'axe 1. Le déplacement est commandé avec uneaccélération constante pour atteindre la vitesse de translation qui reste constante, jusqu'à unedécélération constante conduisant à l'arrêt.
Les paramètres de cette loi demouvement doivent répondre auxexigences, tout en restant acceptables pourles technologies utilisées. Ainsi à partir ducahier des charges, il est possible dedéterminer toutes les caractéristiques dumouvement. 1 2 3 t
)t(1λ&V10
t1 t1+t2 t1+t2+t3
Phase 1 - Mouvement uniformément accéléré (accélération γγγγ1) Jusqu'à la vitesse linéaire V10.
Phase 2 - Mouvement uniforme,
Phase 3 - Mouvement uniformément décéléré (accélération γγγγ3 < 0) Jusqu'à l'arrêt pour atteindrela position souhaitée X3.
# Détermination des caractéristiques de chaque phas e
Dans le cas de plusieurs phases il est plus simple de considérer une origine unique pour lesespaces, et des origines des temps différentes, en début de chaque phase.
- Phase 1 : ]V)t(0[ ; ]X)t(0[ ; ]tt0[ 011111 <<<<<< λλ &
Les équations horaires de la phase 1 s'écrivent :
+×=
+×=
02t
)t(
0t )t(2
11
11
γλ
γλ&Pour t = t1
=⇒
×=
==
2t
VX
2t
)t(
Vt )t(1
01121
11
011111
γλ
γλ& (1)
- Phase 2 : ]V)t([ ; ]X)t(X[ ; ]tt0[ 0112112 =<<<< λλ &
La vitesse est constante, les équations horaires de la phase 2 s'écrivent :
1101 Xt V)t( +×=λ Pour t = t2 ]2t
[t VX Xt V)t( 12102121021 +×=⇒+×=λ (2)
- Phase 3 : ]0)t(V[ ; ]X)t(X[ ; ]tt0[ 1013123 <<<<<< λλ &
Les équations horaires de la phase 3 s'écrivent pour t = t3 :
+×+×=
+×=
210
2
11
1031
XtV2t
)t(
Vt )t(
γλ
γλ&Pour t = t3 ]t
2tt
[VX XtV
2t
)t(
0Vt )t(2
13013
2301
23
331
013331
+
+=⇒++×=
=+=
γλ
γλ& (3)
Cinématique II –Cinématique du solide – Mouvements simples - p.7
Résolution : il reste à utiliser les éléments définis dans le cahier des charges, temps total dumouvement, déplacement total, accélération maximale… Les équations (1), (2) et (3) permettent deconclure.
III – Equiprojectivité du champs des vitesses linéa ires – Torseur cinématique
1. Champ de vecteurs équiprojectif
1.1. Définition : un champ de vecteurs est un ensemble fini ou non de vecteurs régis par unemême loi. Un champ de vecteurs est donc défini par une application f, qui à tout point M de l'espace,fait correspondre un vecteur HHHH. Notation : HHHH(M), est le résultat de l'application au point M.
Exemple : le champ de pesanteur, qui agit sur un solide S, est un champ de vecteurs.
Propriétés de certains champs de vecteurs : champ uniforme : ∀ (A,B) HHHH(A) = HHHH(B)
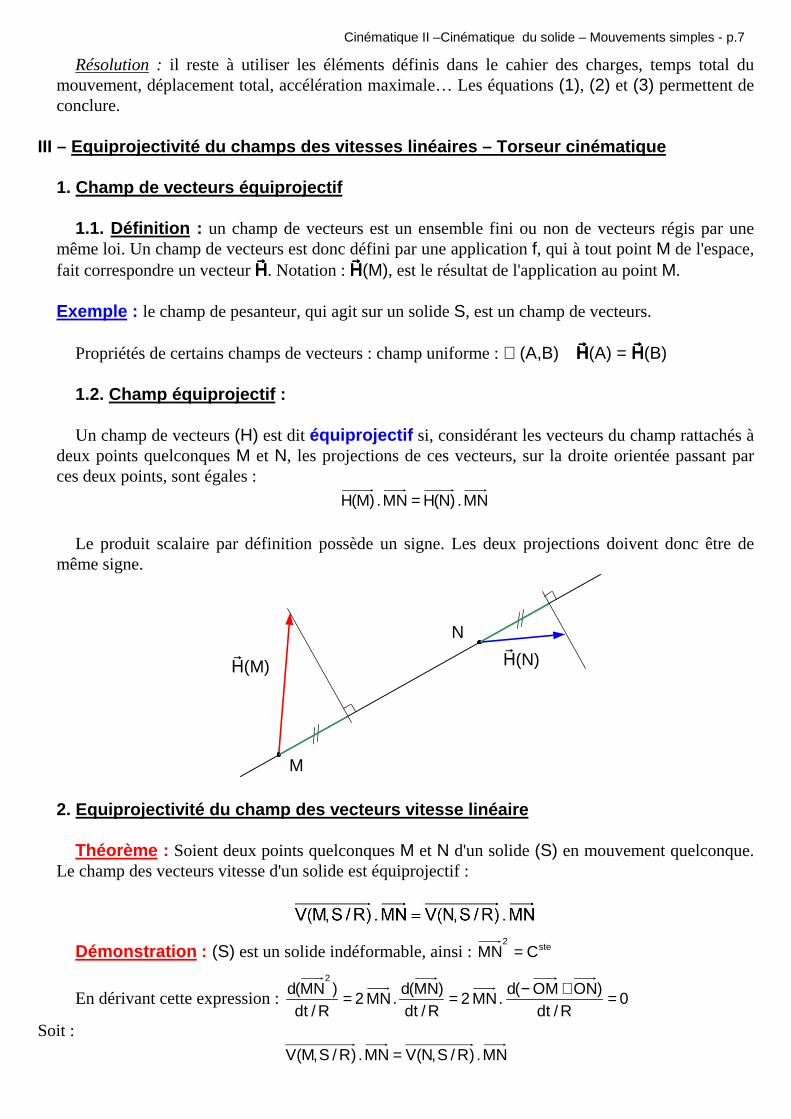
1.2. Champ équiprojectif :
Un champ de vecteurs (H) est dit équiprojectif si, considérant les vecteurs du champ rattachés àdeux points quelconques M et N, les projections de ces vecteurs, sur la droite orientée passant parces deux points, sont égales :
MN . )N(HMN . )M(H =
Le produit scalaire par définition possède un signe. Les deux projections doivent donc être demême signe.
M
N
H(M) H(N)
2. Equiprojectivité du champ des vecteurs vitesse l inéaire
Théorème : Soient deux points quelconques M et N d'un solide (S) en mouvement quelconque.Le champ des vecteurs vitesse d'un solide est équiprojectif :
Démonstration : (S) est un solide indéformable, ainsi : ste2
CMN =
En dérivant cette expression : 0 R/dt
)ONOM (d . MN 2
R/dt)MN(d
. MN 2 R/dt
)MN(d2
=+−==
Soit :
MN . )R/S,N(V MN . )R/S,M(V =

Cinématique II –Cinématique du solide – Mouvements simples - p.8
Conséquence : C'est cette propriété qui va permettre de connaître le champ des vitesseslinéaires d'un solide, dès lors que sa vitesse angulaire et la vitesse linéaire d'un point est connue.
Il sera démontré en STATIQUE, qu'un champ équiprojectif est aussi un champ de moments d'untorseur. Le champ des vecteurs vitesse est donc le champ de moments du torseur cinématique. Larésultante de ce torseur est le vecteur vitesse angulaire.
3. Présentation de l'outil torseur
3.1. Définition
Soit (R) un repère othonormé direct, soit (E) un espace vectoriel associé, de dimension 3, ondéfini un torseur de la façon suivante :
A A
A M
R T
= r
r
R est un représentant d'un champ de vecteurs uniforme, c'est larésultante du torseur.
MA est un vecteur appartenant au champ défini en chaque point
de l'espace par : R BA M M AB
rrr∧+= . C'est le moment du
torseur, au point A.
R BA M M AB
rrr∧+= est la relation fondamentale des moments .
3.2. Utilisation
Les torseurs sont très utilisés pour la mécanique du solide.
# En statique, pour la représentation globale d'une action mécanique.# En cinématique, dynamique pour caractériser les mouvements d'un solide (vitesse,accélération, inertie...)# En résistance des matériaux pour caractériser les efforts au sein de la matière.
IV – Torseur cinématique des liaisons usuelles
1. Définition du torseur cinématique, notation
A
A)R/S,A(V
)R/S()R/S(V
Ω=
# La résultante est le vecteur qui caractérise globalement la rotation du solide
# Le moment est la vitesse linéaire du point A, appartenant au solide. C'est un représentant duchamp des vitesses du solide.
La relation fondamentale des moments s'écrit :
)R/S(BA)R/S,A(V)R/S,B(V Ω∧+=
Cinématique II –Cinématique du solide – Mouvements simples - p.9
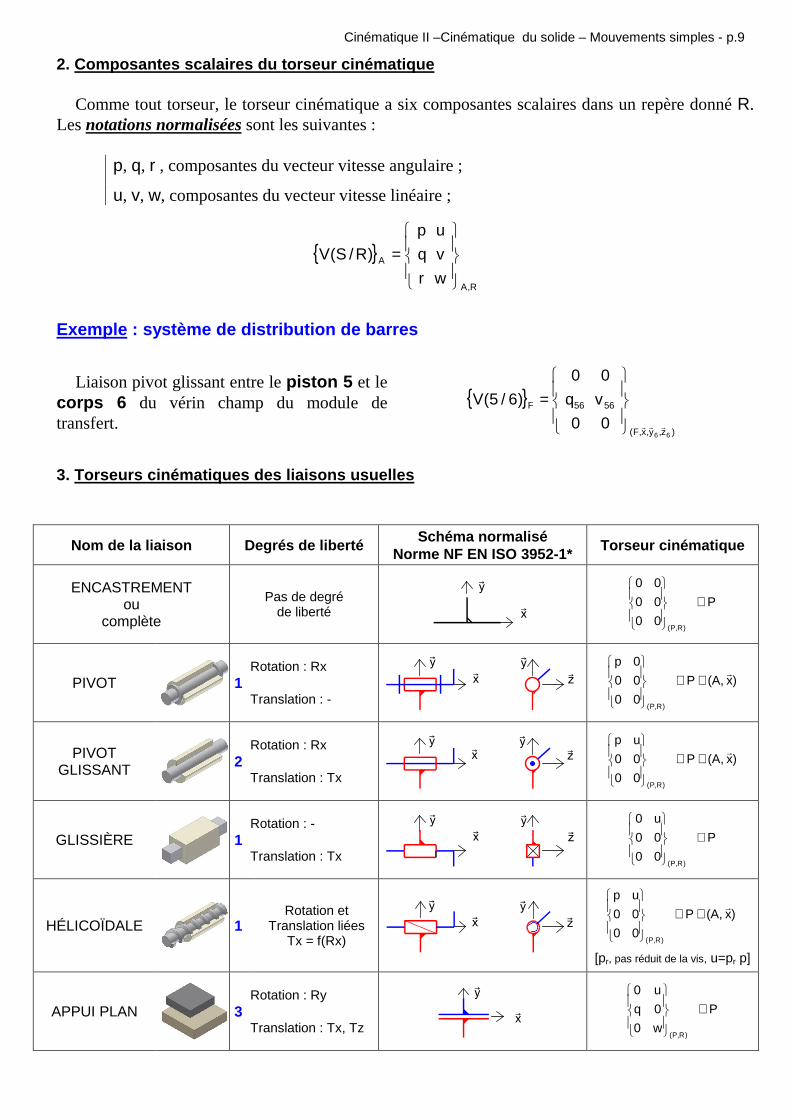
2. Composantes scalaires du torseur cinématique
Comme tout torseur, le torseur cinématique a six composantes scalaires dans un repère donné R.Les notations normalisées sont les suivantes :
p, q, r , composantes du vecteur vitesse angulaire ;
u, v, w, composantes du vecteur vitesse linéaire ;
R,A
A
w
v
u
r
q
p
)R/S(V
=
Exemple : système de distribution de barres
Liaison pivot glissant entre le piston 5 et lecorps 6 du vérin champ du module detransfert.
)z,y,x,F(
5656F
66
0
v
0
0
q
0
)6/5(V
rrr
=
3. Torseurs cinématiques des liaisons usuelles
Nom de la liaison Degrés de libertéSchéma normalisé
Norme NF EN ISO 3952-1*Torseur cinématique
ENCASTREMENTou
complète
Pas de degréde liberté
y
xP
00
00
00
)R,P(
∀
PIVOTRotation : Rx
1Translation : -
y
x
y
z )x (A, P
00
00
0p
)R,P(
r∈∀
PIVOTGLISSANT
Rotation : Rx2
Translation : Tx
y
x
y
z )x (A, P
00
00
up
)R,P(
r∈∀
GLISSIÈRERotation : -
1Translation : Tx
y
x
y
z P
00
00
u0
)R,P(
∀
HÉLICOÏDALE 1Rotation et
Translation liéesTx = f(Rx)
y
x
y
z)x (A, P
00
00
up
)R,P(
r∈∀
[pr, pas réduit de la vis, u=pr p]
APPUI PLANRotation : Ry
3Translation : Tx, Tz
y
xP
w0
0q
u0
)R,P(
∀
Cinématique II –Cinématique du solide – Mouvements simples - p.10
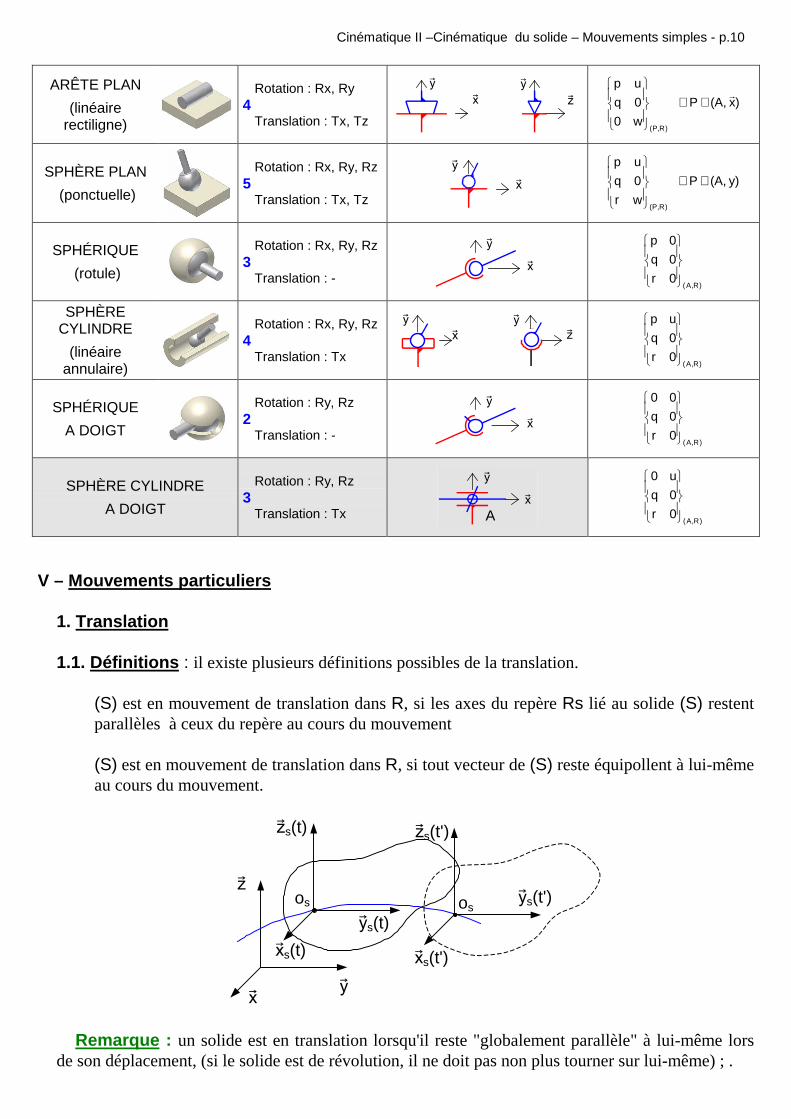
ARÊTE PLAN
(linéairerectiligne)
Rotation : Rx, Ry4
Translation : Tx, Tz
y
x
y
z )x (A, P
w0
0q
up
)R,P(
r∈∀
SPHÈRE PLAN
(ponctuelle)
Rotation : Rx, Ry, Rz5
Translation : Tx, Tz
y
x y)(A, P
wr
0q
up
)R,P(
∈∀
SPHÉRIQUE
(rotule)
Rotation : Rx, Ry, Rz3
Translation : -
y
x
)R,A(0r
0q
0p
SPHÈRECYLINDRE
(linéaireannulaire)
Rotation : Rx, Ry, Rz4
Translation : Tx
y
x
y
z
)R,A(0r
0q
up
SPHÉRIQUE
A DOIGT
Rotation : Ry, Rz2
Translation : -
y
x
)R,A(0r
0q
00
SPHÈRE CYLINDRE
A DOIGT
Rotation : Ry, Rz3
Translation : Tx
y
x
A )R,A(0r
0q
u0
V – Mouvements particuliers
1. Translation
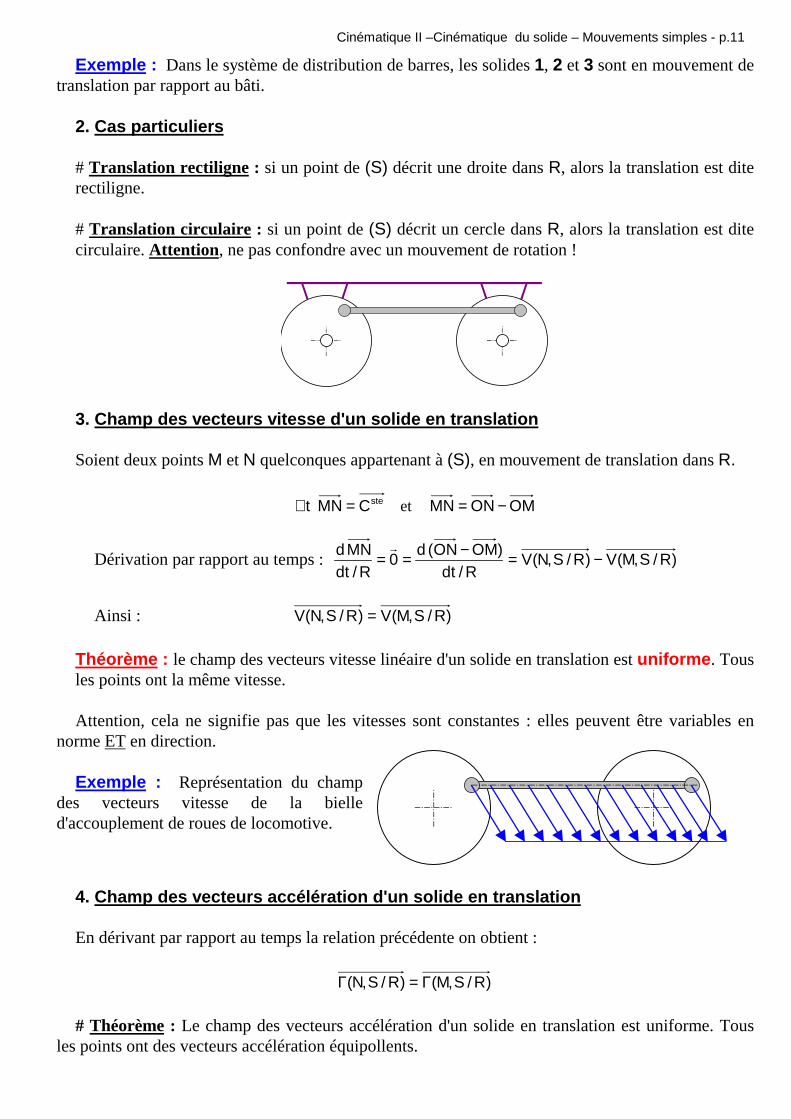
1.1. Définitions : il existe plusieurs définitions possibles de la translation.
(S) est en mouvement de translation dans R, si les axes du repère Rs lié au solide (S) restentparallèles à ceux du repère au cours du mouvement
(S) est en mouvement de translation dans R, si tout vecteur de (S) reste équipollent à lui-mêmeau cours du mouvement.
xy
z
xs(t)
ys(t)
zs(t)
os os
xs(t')
ys(t')
zs(t')
Remarque : un solide est en translation lorsqu'il reste "globalement parallèle" à lui-même lorsde son déplacement, (si le solide est de révolution, il ne doit pas non plus tourner sur lui-même) ; .
Cinématique II –Cinématique du solide – Mouvements simples - p.11
Exemple : Dans le système de distribution de barres, les solides 1, 2 et 3 sont en mouvement detranslation par rapport au bâti.
2. Cas particuliers
# Translation rectiligne : si un point de (S) décrit une droite dans R, alors la translation est diterectiligne.
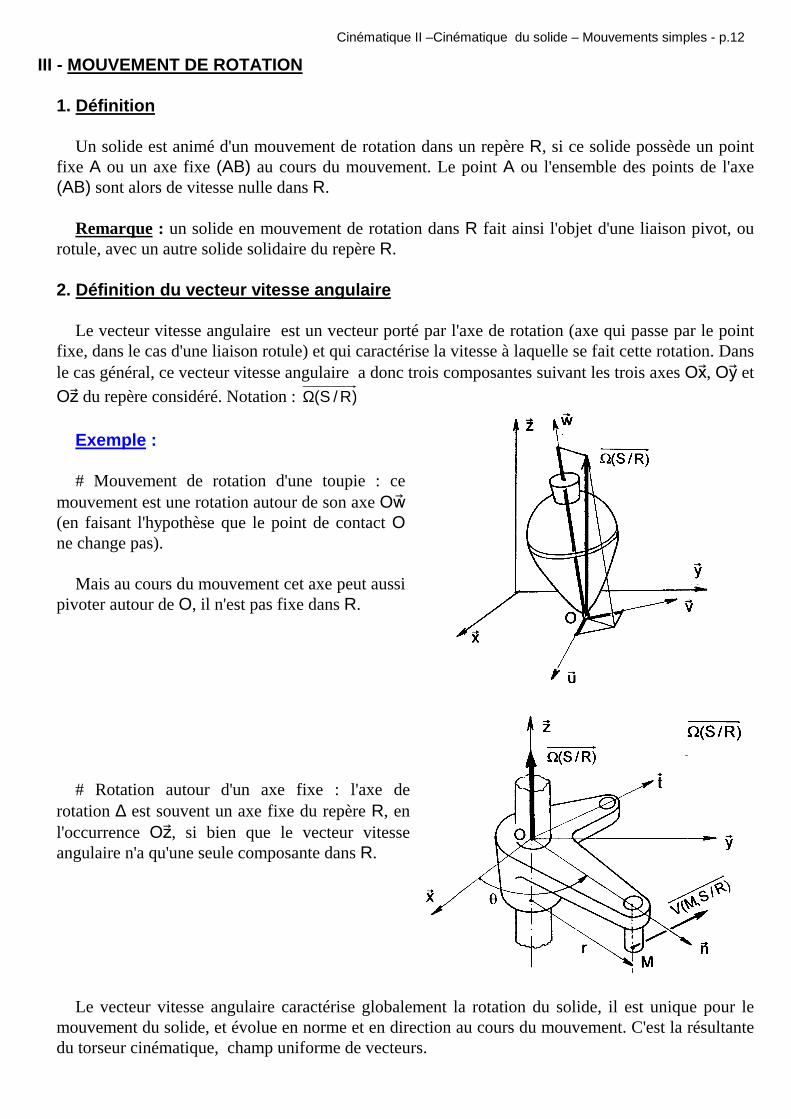
# Translation circulaire : si un point de (S) décrit un cercle dans R, alors la translation est ditecirculaire. Attention , ne pas confondre avec un mouvement de rotation !
3. Champ des vecteurs vitesse d'un solide en transl ation
Soient deux points M et N quelconques appartenant à (S), en mouvement de translation dans R.
steCMN t =∀ et OMONMN −=
Dérivation par rapport au temps : )R/S,M(V)R/S,N(VR/dt
)OMON( d0
R/dtMN d
−=−==r
Ainsi : )R/S,M(V)R/S,N(V =
Théorème : le champ des vecteurs vitesse linéaire d'un solide en translation est uniforme . Tousles points ont la même vitesse.
Attention, cela ne signifie pas que les vitesses sont constantes : elles peuvent être variables ennorme ET en direction.
Exemple : Représentation du champdes vecteurs vitesse de la bielled'accouplement de roues de locomotive.
4. Champ des vecteurs accélération d'un solide en t ranslation
En dérivant par rapport au temps la relation précédente on obtient :
)R/S,M()R/S,N( Γ=Γ
# Théorème : Le champ des vecteurs accélération d'un solide en translation est uniforme. Tousles points ont des vecteurs accélération équipollents.
Cinématique II –Cinématique du solide – Mouvements simples - p.12
III - MOUVEMENT DE ROTATION
1. Définition
Un solide est animé d'un mouvement de rotation dans un repère R, si ce solide possède un pointfixe A ou un axe fixe (AB) au cours du mouvement. Le point A ou l'ensemble des points de l'axe(AB) sont alors de vitesse nulle dans R.
Remarque : un solide en mouvement de rotation dans R fait ainsi l'objet d'une liaison pivot, ourotule, avec un autre solide solidaire du repère R.
2. Définition du vecteur vitesse angulaire
Le vecteur vitesse angulaire est un vecteur porté par l'axe de rotation (axe qui passe par le pointfixe, dans le cas d'une liaison rotule) et qui caractérise la vitesse à laquelle se fait cette rotation. Dansle cas général, ce vecteur vitesse angulaire a donc trois composantes suivant les trois axes Ox, Oy et
Oz du repère considéré. Notation : )R/S(Ω
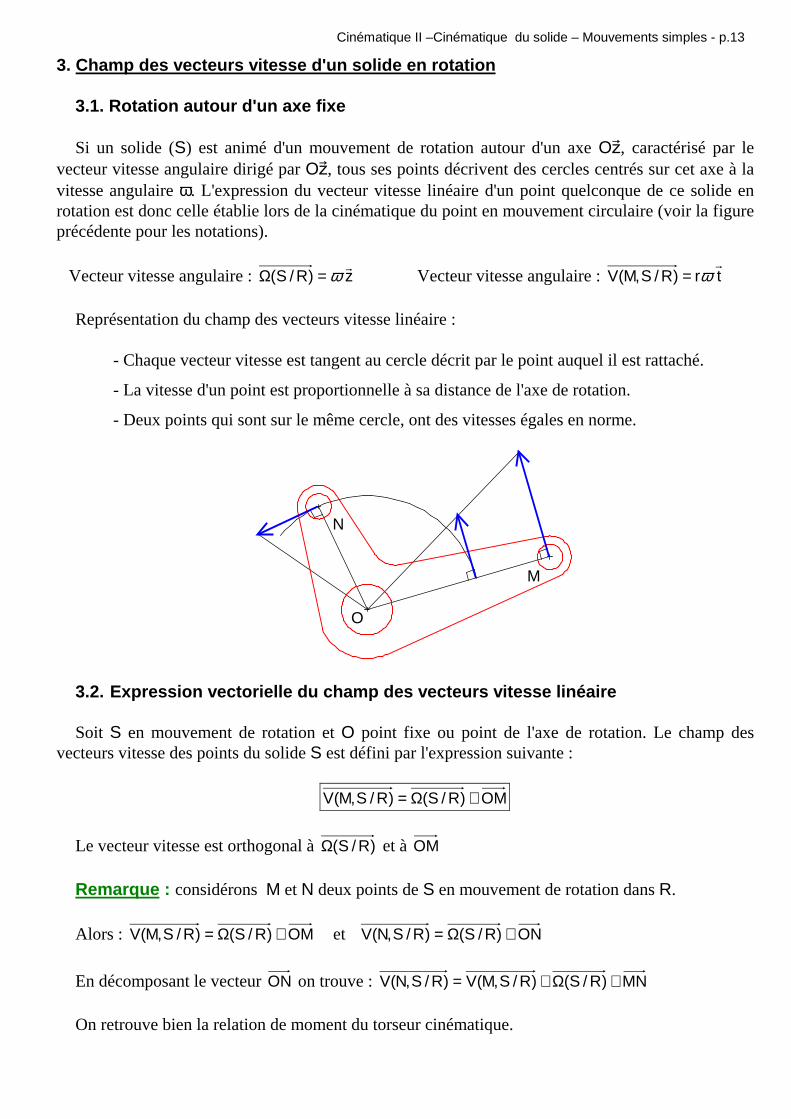
Exemple :
# Mouvement de rotation d'une toupie : cemouvement est une rotation autour de son axe Ow(en faisant l'hypothèse que le point de contact One change pas).
Mais au cours du mouvement cet axe peut aussipivoter autour de O, il n'est pas fixe dans R.
# Rotation autour d'un axe fixe : l'axe derotation ∆ est souvent un axe fixe du repère R, enl'occurrence Oz, si bien que le vecteur vitesseangulaire n'a qu'une seule composante dans R.
Le vecteur vitesse angulaire caractérise globalement la rotation du solide, il est unique pour lemouvement du solide, et évolue en norme et en direction au cours du mouvement. C'est la résultantedu torseur cinématique, champ uniforme de vecteurs.
Cinématique II –Cinématique du solide – Mouvements simples - p.13
3. Champ des vecteurs vitesse d'un solide en rotati on
3.1. Rotation autour d'un axe fixe
Si un solide (S) est animé d'un mouvement de rotation autour d'un axe Oz, caractérisé par levecteur vitesse angulaire dirigé par Oz, tous ses points décrivent des cercles centrés sur cet axe à lavitesse angulaire ω. L'expression du vecteur vitesse linéaire d'un point quelconque de ce solide enrotation est donc celle établie lors de la cinématique du point en mouvement circulaire (voir la figureprécédente pour les notations).
Vecteur vitesse angulaire : z )R/S(r
ω=Ω Vecteur vitesse angulaire : t r)R/S,M(Vr
ω=
Représentation du champ des vecteurs vitesse linéaire :
- Chaque vecteur vitesse est tangent au cercle décrit par le point auquel il est rattaché.
- La vitesse d'un point est proportionnelle à sa distance de l'axe de rotation.
- Deux points qui sont sur le même cercle, ont des vitesses égales en norme.
O
M
N
3.2. Expression vectorielle du champ des vecteurs vitess e linéaire
Soit S en mouvement de rotation et O point fixe ou point de l'axe de rotation. Le champ desvecteurs vitesse des points du solide S est défini par l'expression suivante :
OM)R/S()R/S,M(V ∧Ω=
Le vecteur vitesse est orthogonal à )R/S(Ω et à OM
Remarque : considérons M et N deux points de S en mouvement de rotation dans R.
Alors : OM)R/S()R/S,M(V ∧Ω= et ON)R/S()R/S,N(V ∧Ω=
En décomposant le vecteur ON on trouve : MN)R/S()R/S,M(V)R/S,N(V ∧Ω+=
On retrouve bien la relation de moment du torseur cinématique.
Cinématique II –Cinématique du solide – Mouvements simples - p.14
4. Champ des vecteurs accélération d'un solide en r otation
4.1. Rotation autour d'un axe fixe
L'expression du vecteur accélération d'un point quelconque d'un solide en rotation est celle établie
en cinématique du point en mouvement circulaire : t rn ²r)R/S,M(r
&r
ωω +−=Γ
2n r ωγ −= : Accélération normale, dirigée vers le centre, elle correspond physiquement à la
modification de la trajectoire, de l'orientation du vecteur vitesse.
ωγ &r t = : Accélération tangentielle, elle correspond physiquement à la variation de la norme du
vecteur vitesse.
4.2. Expression générale du champ des vecteurs accélérat ion
Le vecteur accélération d'un point est la dérivée par rapport au temps du vecteur vitesse de cemême point.
Remarque : le vecteur "dérivé du vecteur vitesse angulaire" )R/S(Ω& est le vecteur accélérationangulaire. Ce vecteur peut aussi avoir trois composantes dans l'espace et ses composantes sont lesdérivées par rapport au temps des composantes correspondantes du vecteur vitesse angulaire. Unitéde l'accélération angulaire : rad.s-2.
Dans le cas d'une composante : )t( dt
)]t([d )t( θωω &&& ==
Cinématique II –Cinématique du solide – Mouvements simples - p.15
EXERCICES D'APPLICATION
Ex. 1 - Etude d'un palan1 pouvant se déplacer sur deux rails parallèles et horizontaux montés sur unportique (pont roulant).
1. Etude du mouvement de translation du palan
Ce mouvement de translation s'effectue en trois phases :
- Mouvement uniformément accéléré, accélération a1, durée t1.- Mouvement uniforme, v = 0,2 m.s-1, temps t2 = 1min 20s.- Mouvement uniformément décéléré jusqu'à l'arrêt, décélération a3 telle que ||a3|| = ||a1||.
Déterminer les caractéristiques des trois phases sachant que la distance parcourue est de 20 m autotal.
2. Etude de la descente de la charge
La charge doit être déposée sur une table elle-même en descente verticale : vitesse de descente dela table, Vt = 0,1 m.s-1, vitesse de descente de la charge Vch = 0,2 m.s-1.
# L'ouvrier chargé de la manœuvre commence à freiner le mouvement de descente de la charge à2 cm au-dessus de la table, La décélération du mouvement est de 0,2 m.s-2. A quelle vitesse relativese fera la dépose de la charge ? Pour répondre à cette question, il est utile d'effectuer un schéma,avec l'origine en début de freinage, et un axe orienté pour repérer les abscisses de la charge et de latable.
# A quelle distance de la table l'ouvrier devrait-il commencer le freinage de la charge pour que ladépose se fasse en douceur, c'est à dire à vitesse relative nulle ?
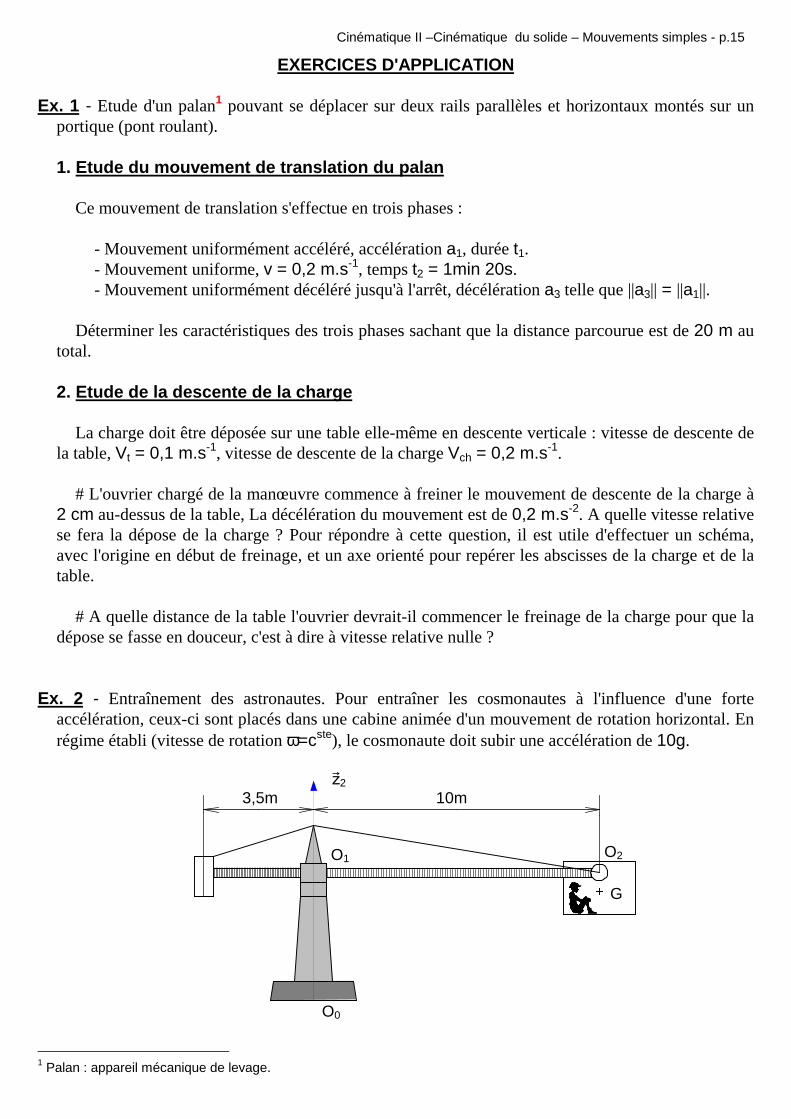
Ex. 2 - Entraînement des astronautes. Pour entraîner les cosmonautes à l'influence d'une forteaccélération, ceux-ci sont placés dans une cabine animée d'un mouvement de rotation horizontal. Enrégime établi (vitesse de rotation ω=cste), le cosmonaute doit subir une accélération de 10g.
G
O2O1
O0
10m3,5mz2
1 Palan : appareil mécanique de levage.
Cinématique II –Cinématique du solide – Mouvements simples - p.16
1. De quelle accélération s'agit-il ? Donner les expressions vectorielles dans un repère adéquat, dela vitesse et de l'accélération.
2. Quelle doit être la vitesse de rotation correspondante, et quelle a été l'accélération angulaire,supposée uniforme, pour obtenir ce régime en 5 min ? Le rayon décrit par la cabine étant de 10 m.
3. Combien de tours a fait le bras pendant le mouvement accéléré ?
4. Quelle a été l'accélération de la cabine Juste avant la fin de l'accélération angulaire ? Donnerson expression vectorielle, et la valeur de sa norme.
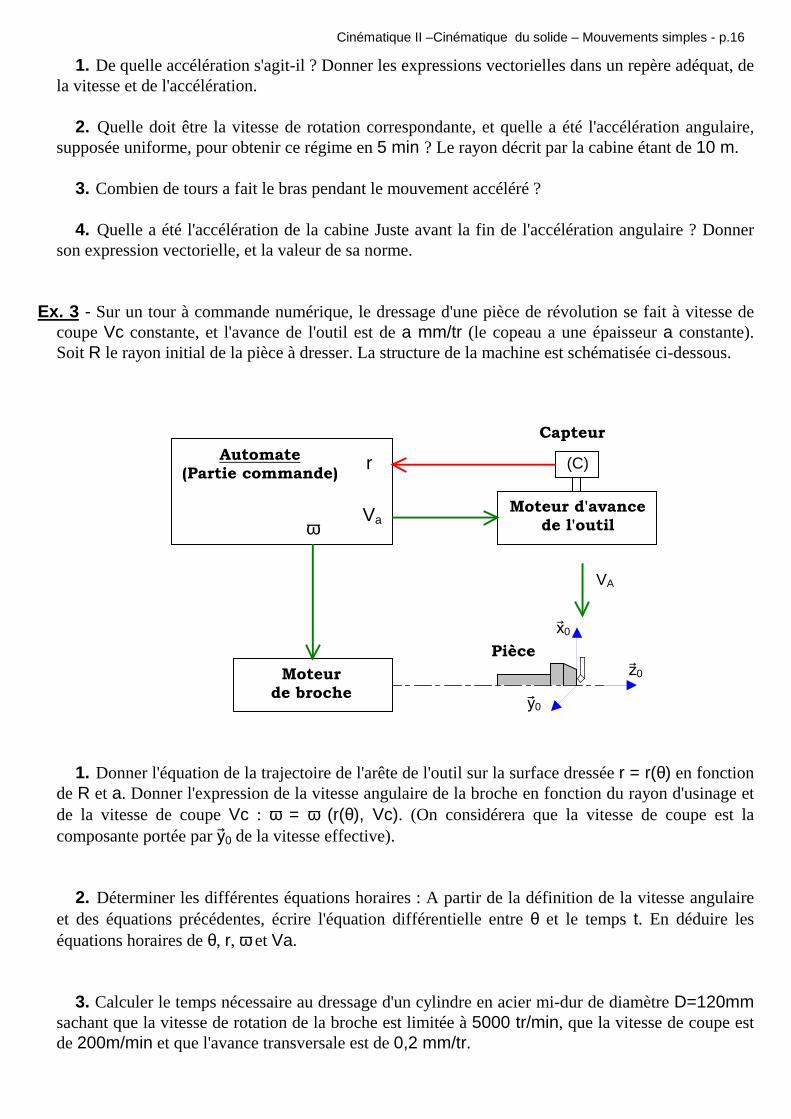
Ex. 3 - Sur un tour à commande numérique, le dressage d'une pièce de révolution se fait à vitesse decoupe Vc constante, et l'avance de l'outil est de a mm/tr (le copeau a une épaisseur a constante).Soit R le rayon initial de la pièce à dresser. La structure de la machine est schématisée ci-dessous.
Automate(Partie commande)
Moteurde broche
Moteur d'avancede l'outil
Capteur
(C)r
Vaω
Pièce
x0
z0
y0
VA
1. Donner l'équation de la trajectoire de l'arête de l'outil sur la surface dressée r = r(θ) en fonctionde R et a. Donner l'expression de la vitesse angulaire de la broche en fonction du rayon d'usinage etde la vitesse de coupe Vc : ω = ω (r(θ), Vc). (On considérera que la vitesse de coupe est lacomposante portée par y0 de la vitesse effective).
2. Déterminer les différentes équations horaires : A partir de la définition de la vitesse angulaireet des équations précédentes, écrire l'équation différentielle entre θ et le temps t. En déduire leséquations horaires de θ, r, ω et Va.
3. Calculer le temps nécessaire au dressage d'un cylindre en acier mi-dur de diamètre D=120mmsachant que la vitesse de rotation de la broche est limitée à 5000 tr/min, que la vitesse de coupe estde 200m/min et que l'avance transversale est de 0,2 mm/tr.
Cinématique II –Cinématique du solide – Mouvements simples - p.17
Ex. 4 – Système de distribution de barres, support mobile
Pour gérer le module de séparation, il est nécessaire de connaître la vitesse du centre E. Ce pointappartient au support mobile. On considère le support mobile dans la position de la figure réponse.
Le déplacement du vérin entraîne une rotation telle que || )0/4,D(V || = 0,15 m.s-1
Données : O4D = d = 400 mm ; 44 zn ymDErr
−= avec m = 215 mm et n = 280 mm
1. Détermination graphique de )0/4,E(V
1.1. Représenter le vecteur vitesse )0/4,D(V sur la figure R1 .
1.2. En utilisant le champ des vitesses linaires du solide 4 dans son mouvement par rapport à 0,
tracer )0/4,E(V . Préciser sa norme.
1.3. Retrouver ce vecteur en utilisant l'équiprojectivité du champ des vitesses linaires du solide 4dans son mouvement par rapport à 0.
2. Expression analytique de )0/4,E(V
2.1. Déterminer l'expression littérale analytique de )0/4,E(V .
2.2. Retrouver le résultat de la question 1.2..
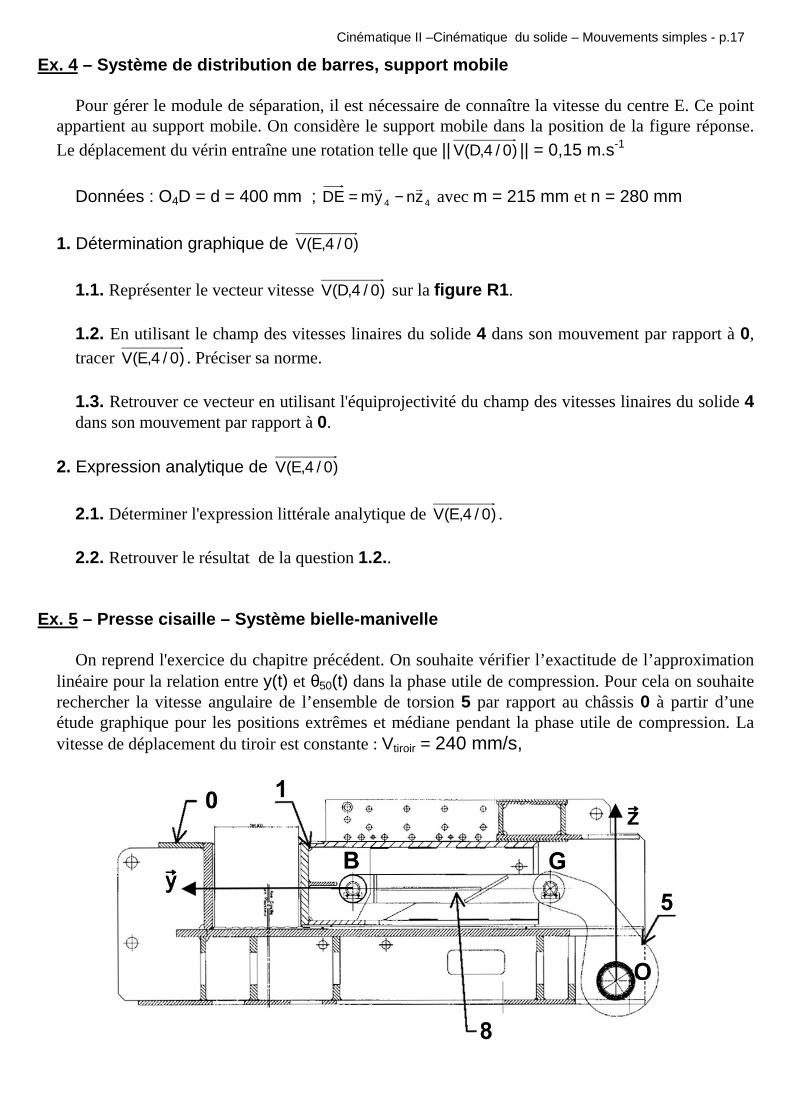
Ex. 5 – Presse cisaille – Système bielle-manivelle
On reprend l'exercice du chapitre précédent. On souhaite vérifier l’exactitude de l’approximationlinéaire pour la relation entre y(t) et θ50(t) dans la phase utile de compression. Pour cela on souhaiterechercher la vitesse angulaire de l’ensemble de torsion 5 par rapport au châssis 0 à partir d’uneétude graphique pour les positions extrêmes et médiane pendant la phase utile de compression. Lavitesse de déplacement du tiroir est constante : Vtiroir = 240 mm/s,
Cinématique II –Cinématique du solide – Mouvements simples - p.18
1. Hypothèse de linéarité
On considère K, le coefficient de linéarité trouvé entre y(t) et θ50(t) dans la phase utile decompression. K = -716 mm.rad-1. Après avoir redonné les définitions de )t(y& et )t(50θ& déterminer
une relation entre K, )t(y& et )t(50θ& . Faire l'application numérique.
2. Validation graphique
Après avoir justifié la démarche, construire sur la figure réponse R2 , la vitesse de G,
)0/5,G(V pour les positions relatives aux détecteurs t0, ti et t1. Conclure.
Echelle des vitesses : 1 cm pour 50 mm/s. OG = 800 mm