Embed Size (px)
Citation preview
Correction des systèmes linéaires continus
6. Méthodes de réglages des paramètres du régulateur PID
On rappelle que le rôle d’un régulateur est de maintenir la grandeur régulée à une valeur de la consigne malgré la présence des perturbations dans le fonctionnement en régulation ou suivre la variation d’une consigne dans le fonctionnement en asservissement. Au moyen du choix des actions et de leurs paramètres, il est possible d’obtenir un comportement désiré en boucle fermée, caractérisant les performances du système. De manière qualitative, les critères à satisfaire sont les suivants :
Ø Les effets de perturbations doivent être minimisés ou encore mieux, ils doivent être effacés complètementet ce, le plus rapidement possible.
Ø Les changements de consigne doivent être suivis rapidement et avec une bonne précision. De manière quantitative, il s’agit de proposer les actions (P,I,D) du régulateur et de leurs paramètres (Kp, Ti, Td) répondant le mieux possible aux spécifications d’un cahier de charges.
Ce problème est connu par la synthèse des régulateurs. Les méthodes de synthèse sont très nombreuses et une classification rigoureuse n’est pas une tâche facile. Néanmoins, on peut distinguer les deux types de méthodes :
Ø Des méthodes dites empiriques ne nécessitant pas une connaissance parfaite du modèle du procédé àcommander. Les paramètres du régulateur seront calculés à partir des essais expérimentaux sur le procédé(Relevé de la réponse indicielle par exemple). L’intérêt majeur de ces méthodes réside dans leur simplicité.Elles sont largement utilisées dans le domaine industriel et elles sont dans la plus part des cas suffisantesmais ne permettent pas un réglage fin.
Ø Des méthodes basées sur la connaissance d’un modèle du système sous forme d’une fonction de transfert.Les actions du régulateur seront calculées de façon à obtenir la fonction de transfert souhaitée en bouclefermée.
6.1 Méthodes empiriques (Méthodes de Ziegler et Nichols) Ziegler et Nichols ont proposé deux approches expérimentales destinées à ajuster rapidement les paramètres des régulateurs P, PI et PID. La première nécessite l’enregistrement de la réponse indicielle du système à régler, alors que la deuxième demande d’amener le système en boucle fermée à sa limite de stabilité. Il est important de souligner que ces méthodes ne s’appliquent en général qu’à des systèmes sans comportement oscillant et dont le déphasage en hautes fréquences dépasse -180°. Ces systèmes possèdent souvent un retard pur et/ou plusieurs constantes de temps. On les rencontre surtout dans les processus physicochimiques tels que la régulation de température, de niveau, de pression, etc.
a. Méthode de Ziegler-Nichols en boucle ouverte (première méthode de Ziegler-Nichols)
Sur l’enregistrement de la réponse indicielle du seul système à régler (c’est-à-dire sans le régulateur), on trace le mieux possible la tangente au point d’inflexion Q de la courbe. On mesure ensuite les temps Tu correspondant au point d’intersection entre l’abscisse et la tangente ainsi que le temps Ta (temps de montée de la tangente”).
Page 1 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
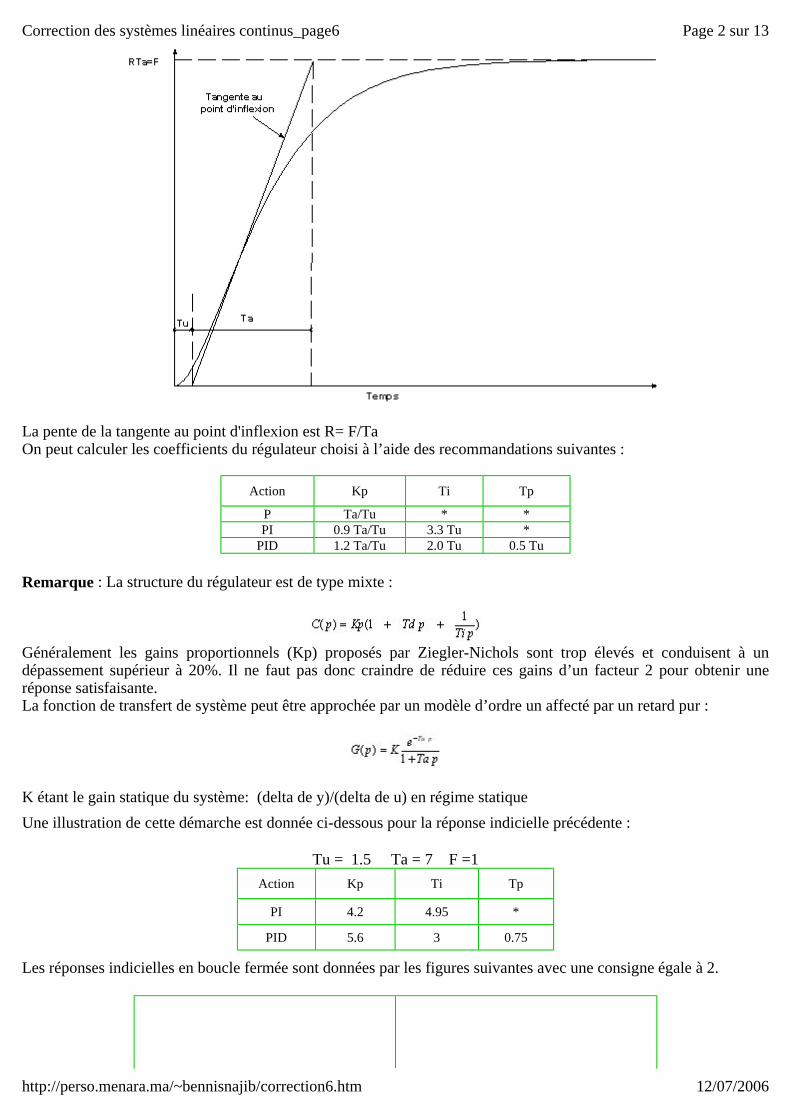
La pente de la tangente au point d'inflexion est R= F/Ta On peut calculer les coefficients du régulateur choisi à l’aide des recommandations suivantes :
Remarque : La structure du régulateur est de type mixte :
Généralement les gains proportionnels (Kp) proposés par Ziegler-Nichols sont trop élevés et conduisent à un dépassement supérieur à 20%. Il ne faut pas donc craindre de réduire ces gains d’un facteur 2 pour obtenir une réponse satisfaisante. La fonction de transfert de système peut être approchée par un modèle d’ordre un affecté par un retard pur :
K étant le gain statique du système: (delta de y)/(delta de u) en régime statique Une illustration de cette démarche est donnée ci-dessous pour la réponse indicielle précédente :
Tu = 1.5 Ta = 7 F =1
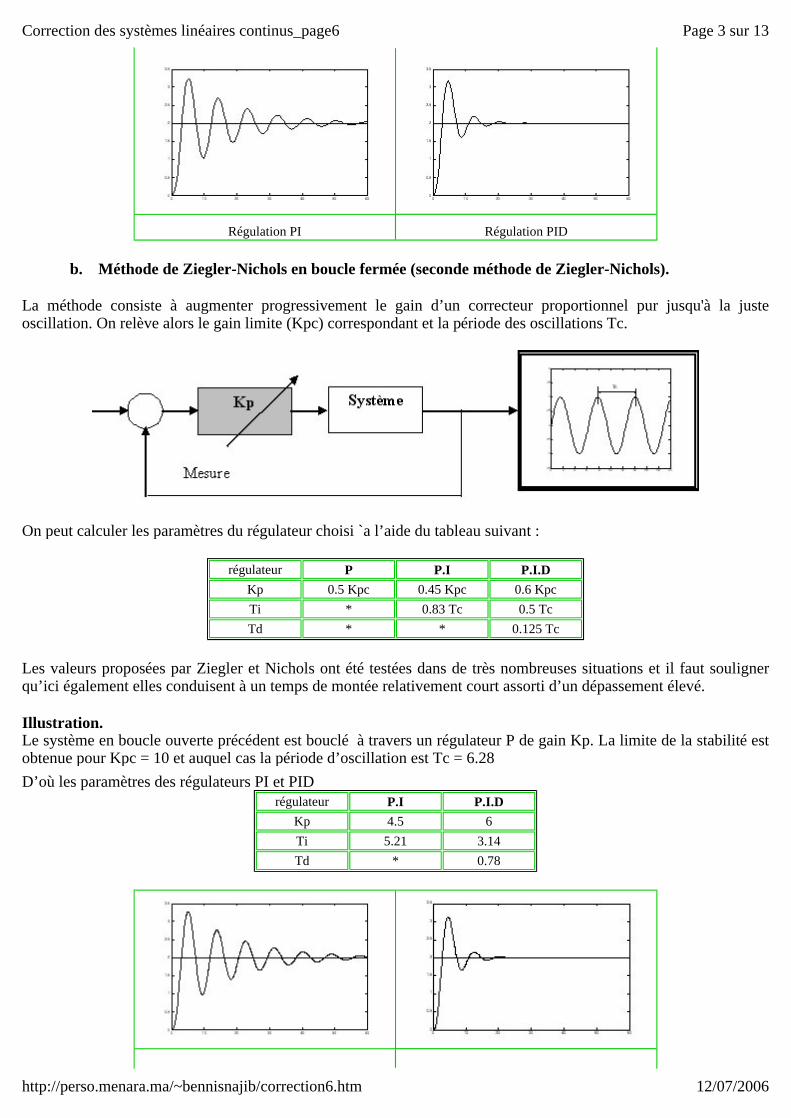
Les réponses indicielles en boucle fermée sont données par les figures suivantes avec une consigne égale à 2.
Action Kp Ti Tp
P Ta/Tu * * PI 0.9 Ta/Tu 3.3 Tu *
PID 1.2 Ta/Tu 2.0 Tu 0.5 Tu
Action Kp Ti Tp
PI 4.2 4.95 *
PID 5.6 3 0.75
Page 2 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
b. Méthode de Ziegler-Nichols en boucle fermée (seconde méthode de Ziegler-Nichols).
La méthode consiste à augmenter progressivement le gain d’un correcteur proportionnel pur jusqu'à la juste oscillation. On relève alors le gain limite (Kpc) correspondant et la période des oscillations Tc.
On peut calculer les paramètres du régulateur choisi `a l’aide du tableau suivant :
Les valeurs proposées par Ziegler et Nichols ont été testées dans de très nombreuses situations et il faut souligner qu’ici également elles conduisent à un temps de montée relativement court assorti d’un dépassement élevé.
Illustration. Le système en boucle ouverte précédent est bouclé à travers un régulateur P de gain Kp. La limite de la stabilité est obtenue pour Kpc = 10 et auquel cas la période d’oscillation est Tc = 6.28 D’où les paramètres des régulateurs PI et PID
Régulation PI Régulation PID
régulateur P P.I P.I.D Kp 0.5 Kpc 0.45 Kpc 0.6 Kpc Ti * 0.83 Tc 0.5 Tc Td * * 0.125 Tc
régulateur P.I P.I.D Kp 4.5 6 Ti 5.21 3.14 Td * 0.78
Page 3 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
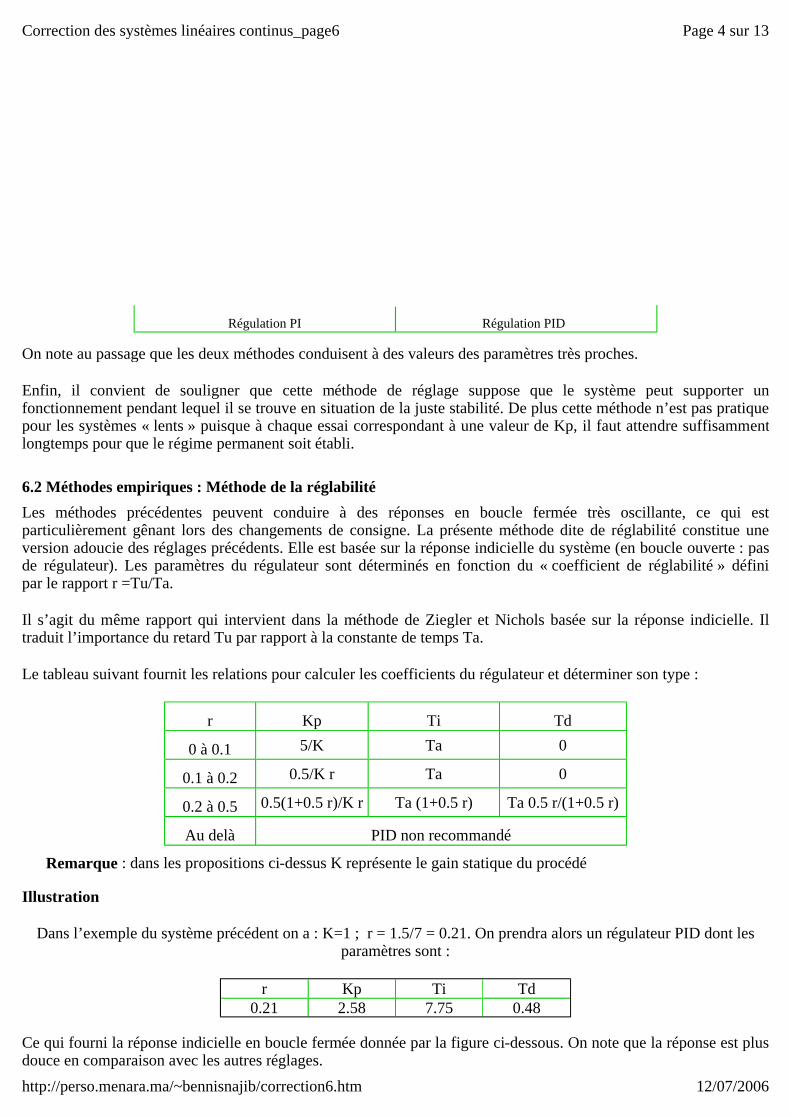
On note au passage que les deux méthodes conduisent à des valeurs des paramètres très proches.
Enfin, il convient de souligner que cette méthode de réglage suppose que le système peut supporter un fonctionnement pendant lequel il se trouve en situation de la juste stabilité. De plus cette méthode n’est pas pratique pour les systèmes « lents » puisque à chaque essai correspondant à une valeur de Kp, il faut attendre suffisamment longtemps pour que le régime permanent soit établi. 6.2 Méthodes empiriques : Méthode de la réglabilité Les méthodes précédentes peuvent conduire à des réponses en boucle fermée très oscillante, ce qui est particulièrement gênant lors des changements de consigne. La présente méthode dite de réglabilité constitue une version adoucie des réglages précédents. Elle est basée sur la réponse indicielle du système (en boucle ouverte : pas de régulateur). Les paramètres du régulateur sont déterminés en fonction du « coefficient de réglabilité » défini par le rapport r =Tu/Ta.
Il s’agit du même rapport qui intervient dans la méthode de Ziegler et Nichols basée sur la réponse indicielle. Il traduit l’importance du retard Tu par rapport à la constante de temps Ta.
Le tableau suivant fournit les relations pour calculer les coefficients du régulateur et déterminer son type :
Remarque : dans les propositions ci-dessus K représente le gain statique du procédé
Illustration
Dans l’exemple du système précédent on a : K=1 ; r = 1.5/7 = 0.21. On prendra alors un régulateur PID dont les paramètres sont :
Ce qui fourni la réponse indicielle en boucle fermée donnée par la figure ci-dessous. On note que la réponse est plus douce en comparaison avec les autres réglages.
Régulation PI Régulation PID
r Kp Ti Td
0 à 0.1 5/K Ta 0
0.1 à 0.2 0.5/K r Ta 0
0.2 à 0.5 0.5(1+0.5 r)/K r Ta (1+0.5 r) Ta 0.5 r/(1+0.5 r)
Au delà PID non recommandé
r Kp Ti Td0.21 2.58 7.75 0.48
Page 4 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
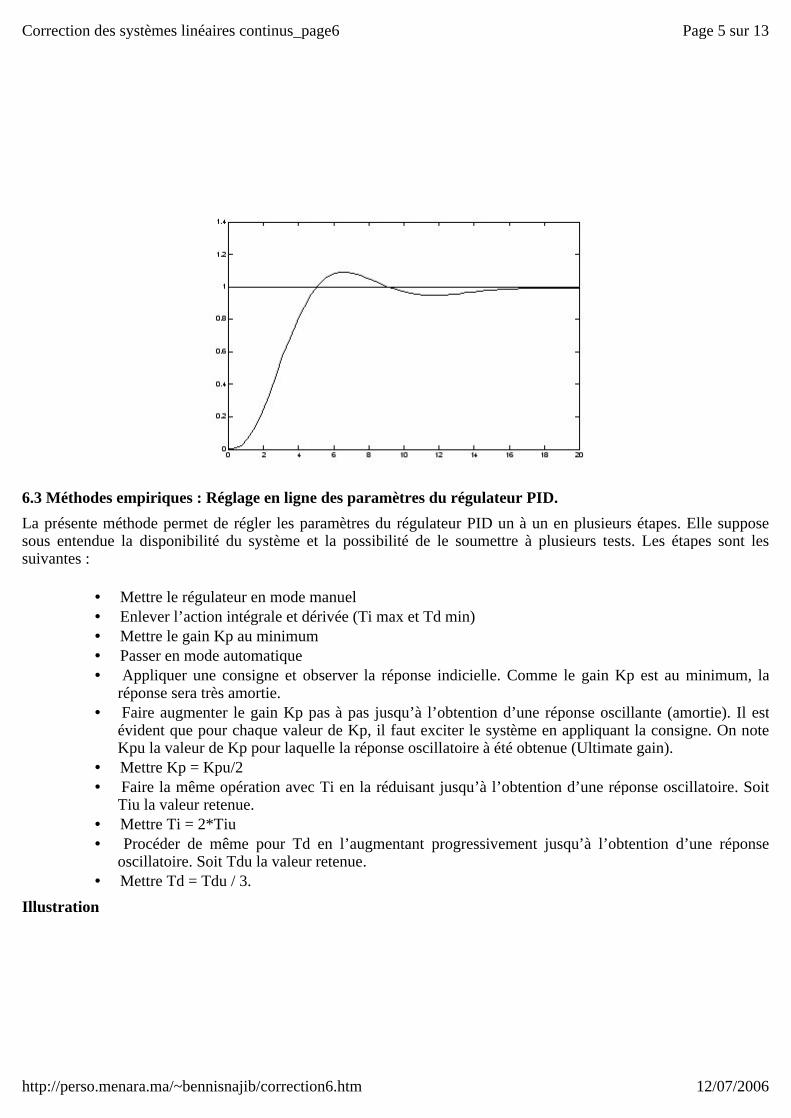
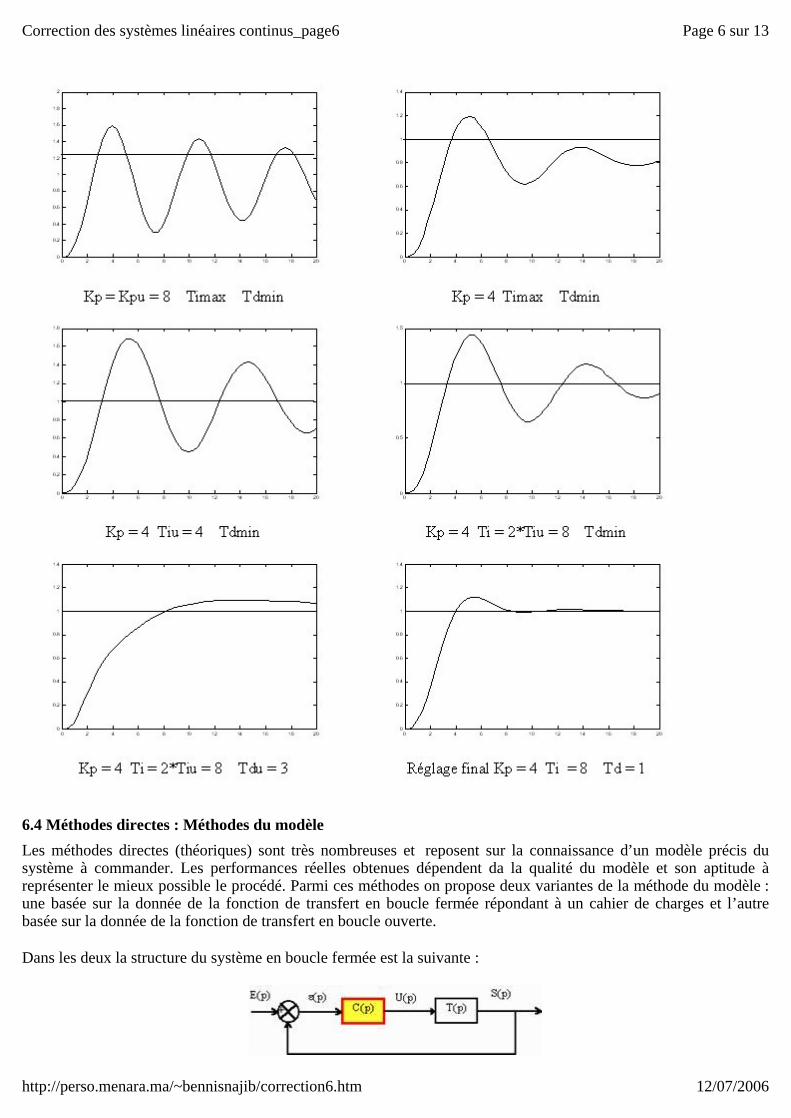
6.3 Méthodes empiriques : Réglage en ligne des paramètres du régulateur PID. La présente méthode permet de régler les paramètres du régulateur PID un à un en plusieurs étapes. Elle suppose sous entendue la disponibilité du système et la possibilité de le soumettre à plusieurs tests. Les étapes sont les suivantes :
• Mettre le régulateur en mode manuel • Enlever l’action intégrale et dérivée (Ti max et Td min) • Mettre le gain Kp au minimum • Passer en mode automatique • Appliquer une consigne et observer la réponse indicielle. Comme le gain Kp est au minimum, la
réponse sera très amortie. • Faire augmenter le gain Kp pas à pas jusqu’à l’obtention d’une réponse oscillante (amortie). Il est
évident que pour chaque valeur de Kp, il faut exciter le système en appliquant la consigne. On noteKpu la valeur de Kp pour laquelle la réponse oscillatoire à été obtenue (Ultimate gain).
• Mettre Kp = Kpu/2 • Faire la même opération avec Ti en la réduisant jusqu’à l’obtention d’une réponse oscillatoire. Soit
Tiu la valeur retenue. • Mettre Ti = 2*Tiu • Procéder de même pour Td en l’augmentant progressivement jusqu’à l’obtention d’une réponse
oscillatoire. Soit Tdu la valeur retenue. • Mettre Td = Tdu / 3.
Illustration
Page 5 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
6.4 Méthodes directes : Méthodes du modèle Les méthodes directes (théoriques) sont très nombreuses et reposent sur la connaissance d’un modèle précis du système à commander. Les performances réelles obtenues dépendent da la qualité du modèle et son aptitude à représenter le mieux possible le procédé. Parmi ces méthodes on propose deux variantes de la méthode du modèle : une basée sur la donnée de la fonction de transfert en boucle fermée répondant à un cahier de charges et l’autre basée sur la donnée de la fonction de transfert en boucle ouverte.
Dans les deux la structure du système en boucle fermée est la suivante :
Page 6 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
La fonction de transfert en boucle ouverte est G(p) = C(p) T(p)
La fonction de transfert en boucle fermée est:
a. Méthode du modèle : Orientation boucle fermée
Si la fonction de transfert en fermée est donnée (désirée), le régulateur C(p) est déterminé par la relation suivante :
La réalisabilité de C(p) est conditionnée par la différence des degrés des polynômes entre le numérateur et le dénominateur de cette fonction de transfert. En effet, on dit qu’un transfert est réalisable si le degré du dénominateur est supérieur ou égal à celui du numérateur. Usuellement, le comportement souhaité en boucle fermé est celui d’un système d’ordre un ou d’ordre deux avec un gain statique unitaire, ce qui permet une précision statique parfaite.
Exemple :
Soit Fd(p) la fonction de transfert désirée en boucle fermée :
où τ est choisi de manière à fixer le temps de réponse. Le régulateur C(p) est alors :
On note au passage que le régulateur apporte une intégration ce qui assure une précision statique parfaite.
Supposons que le système admet la fonction de transfert suivante :
, C(p) devient :
Le régulateur résultant est donc un PID de type série avec les paramètres :
Remarques :
• On aurait pu affecter à Ti la constante de temps τ2 et à Td la constante de temps τ1. En pratique, on fait le choix de manière à ce que Ti soit plus grande à Td.
• Autres structures pour C(p) sont possibles :
è PID mixte
è PID parallèle
• Il convient dans tous les cas d’ajouter un filtre passe-bas à l’étage réalisant l’action dérivée ou au montageréalisant C(p) comme le montre les expressions suivantes par exemple:
Page 7 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
τ0 doit être choisi de manière à réaliser une bonne qualité de filtrage des hautes fréquences sans pénaliser le système par l’ajout de cette constante de temps. En faite τ0 n’est pas un paramètre de synthèse comme Kp, Ti et Td, mais plutôt un paramètre de réglage supplémentaire d’ordre pratique.
• Dans la méthode du modèle, C(p) s’obtient par inversion du modèle du procédé :
et det donc elle ne convient pas pour les systèmes pour lesquels la fonction de transfert possède un retard pur ou un zéro
instable c'est-à-dire à partie réelle positive; car dans le premier cas C(p) est irréalisable (présence d’opérateuravance) et dans le second cas, le régulateur est instable :
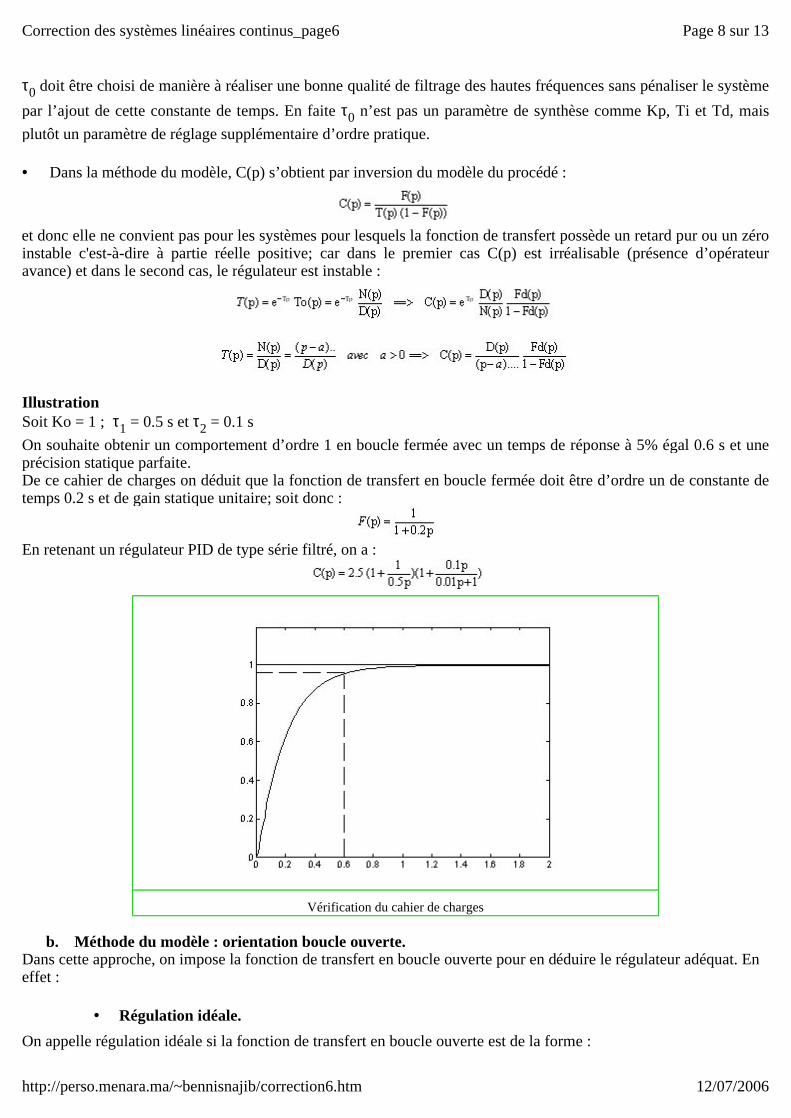
Illustration Soit Ko = 1 ; τ1 = 0.5 s et τ2 = 0.1 s On souhaite obtenir un comportement d’ordre 1 en boucle fermée avec un temps de réponse à 5% égal 0.6 s et une précision statique parfaite. De ce cahier de charges on déduit que la fonction de transfert en boucle fermée doit être d’ordre un de constante de temps 0.2 s et de gain statique unitaire; soit donc :
En retenant un régulateur PID de type série filtré, on a :
b. Méthode du modèle : orientation boucle ouverte. Dans cette approche, on impose la fonction de transfert en boucle ouverte pour en déduire le régulateur adéquat. En effet :
• Régulation idéale. On appelle régulation idéale si la fonction de transfert en boucle ouverte est de la forme :
Vérification du cahier de charges
Page 8 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm

La constante de temps T est donnée et la fonction de transfert T(p) du procédé est connue, on déduit alors l’expression du régulateur C(p) par :
En conséquence, la fonction de transfert F(p) en boucle fermée est donnée par :
C'est-à-dire un comportement transitoire d’ordre un avec une précision statique parfaite. Les performances sont alors : ü Stabilité inconditionnelle ü Précision statique parfaite ü Régime transitoire apériodique avec un temps de réponse fixé par le choix de T.
Exemple Soit
. La régulation idéale sera obtenue si C(p) est choisi tel que :
C'est-à-dire un régulateur de type PI avec un gain proportionnel Kp = 2/5T et de constante d’intégration Ti = 2. La constante de temps T sera choisie de manière à fixer le temps de réponse en boucle fermée. Remarque Il n’est pas toujours possible d’obtenir une régulation idéale car cela dépend de la réalisabilité de C(p). En effet, si
cela conduirait à l’expression irréalisable suivante pour le régulateur :
• Régulation parfaite
Ce type de régulation est envisagé si la régulation idéale n’est possible. Elle correspond à la définition suivante :
Les constantes T et λ sont fixées par les éléments du cahier des charges et la fonction de transfert T(p) est connue, C(p) se calcule par :
En conséquence de ce choix, la fonction de transfert en boucle fermée est :
Ce qui permet d’assurer les performances suivantes : ü Stabilité inconditionnelle ü Précision statique parfaite ü Régime transitoire fixé par les paramètres ξ et ωn et donc par les paramètres T et λ.
Exemple On reprend le cas du système précédent pour lequel la régulation idéale n’a pas été possible. C(p) est donné par :
Page 9 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm

En prenant λ = τ è
. Il s’agit donc d’un régulateur PID de type série de gain:
et Ti = Td = τ. Le choix de T impose le régime transitoire désiré. On termine cette série de méthodes de synthèse par une démarche basée sur des considérations fréquentielles.
6.5 Méthode directe : méthode fréquentielle Cette méthode est envisagée lorsque le cahier des charges contient des spécifications relatives à des considérations fréquentielles : bande passante, coefficient de qualité, marge de stabilité (marge de gain ou marge de phase)…, avec éventuellement une performance sur la précision. Il convient de souligner que dans ce cas, il n’existe pas une démarche systématique à suivre et souvent la synthèse est guidée par le bon sens du concepteur. Pour illustrer cette méthode, on considère les deux exemples suivants : Exemple 1 (facile !!) Le système à contrôler est donné par sa fonction de transfert suivante :
et le cahier des charges est : ü Erreur indicielle nulle. (Précision statique parfaite) ü Marge de phase MP= 45°.
La contrainte sur la précision impose l’introduction de l’action I. Quant à la deuxième contrainte, elle peut être ajustée par une action P. Soit donc le régulateur PI suivant:
On ajuste le gain Kp du régulateur P agissant seul de manière à satisfaire la contrainte sur la marge de phase :
è De l’équation (2) on déduit que wo =13.5 et de l’équation (1) on calcule Kp = 2.3. La figure suivante confirme ces résultats.
Il convient à présent d’ajuster la constante d’intégration Ti de manière à ce que la marge de phase reste égale à 45°. Ceci peut être assuré si on choisit Ti de telle sorte que la contribution en module et en argument du terme
C(p)=Kp = 3.8 MP = 45°
Page 10 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
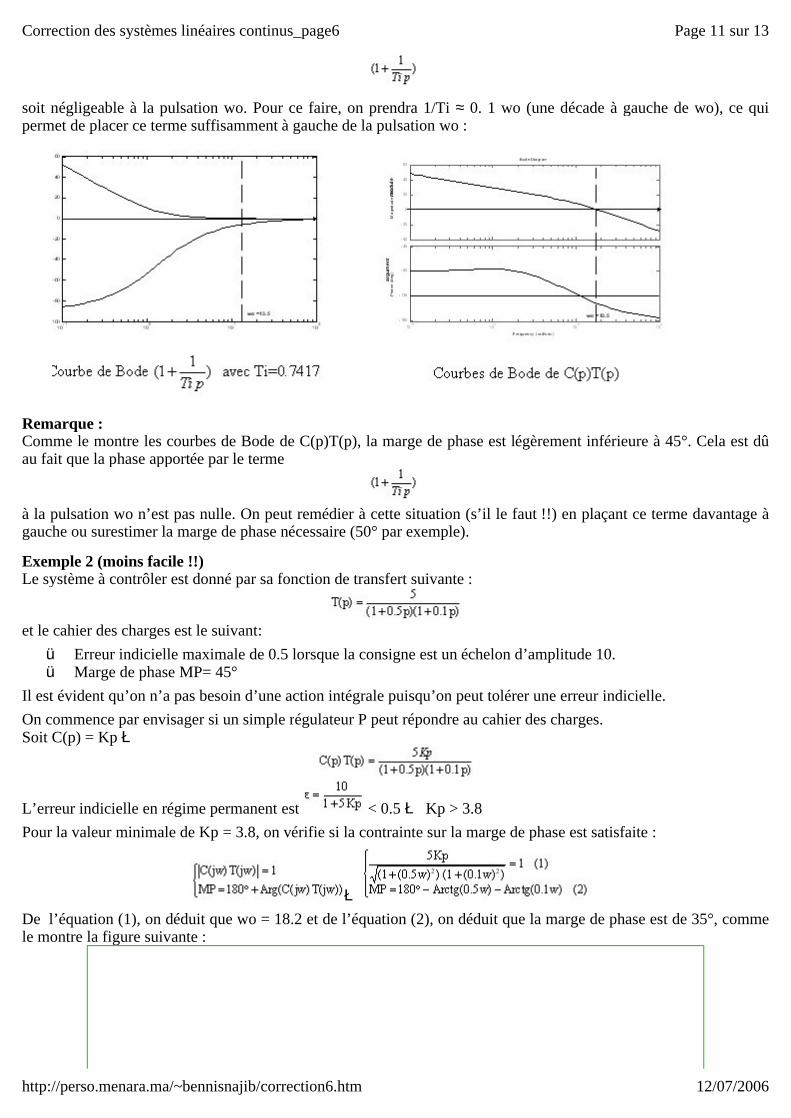
soit négligeable à la pulsation wo. Pour ce faire, on prendra 1/Ti ≈ 0. 1 wo (une décade à gauche de wo), ce qui permet de placer ce terme suffisamment à gauche de la pulsation wo :
Remarque : Comme le montre les courbes de Bode de C(p)T(p), la marge de phase est légèrement inférieure à 45°. Cela est dû au fait que la phase apportée par le terme
à la pulsation wo n’est pas nulle. On peut remédier à cette situation (s’il le faut !!) en plaçant ce terme davantage à gauche ou surestimer la marge de phase nécessaire (50° par exemple).
Exemple 2 (moins facile !!) Le système à contrôler est donné par sa fonction de transfert suivante :
et le cahier des charges est le suivant: ü Erreur indicielle maximale de 0.5 lorsque la consigne est un échelon d’amplitude 10. ü Marge de phase MP= 45°
Il est évident qu’on n’a pas besoin d’une action intégrale puisqu’on peut tolérer une erreur indicielle. On commence par envisager si un simple régulateur P peut répondre au cahier des charges. Soit C(p) = Kp è
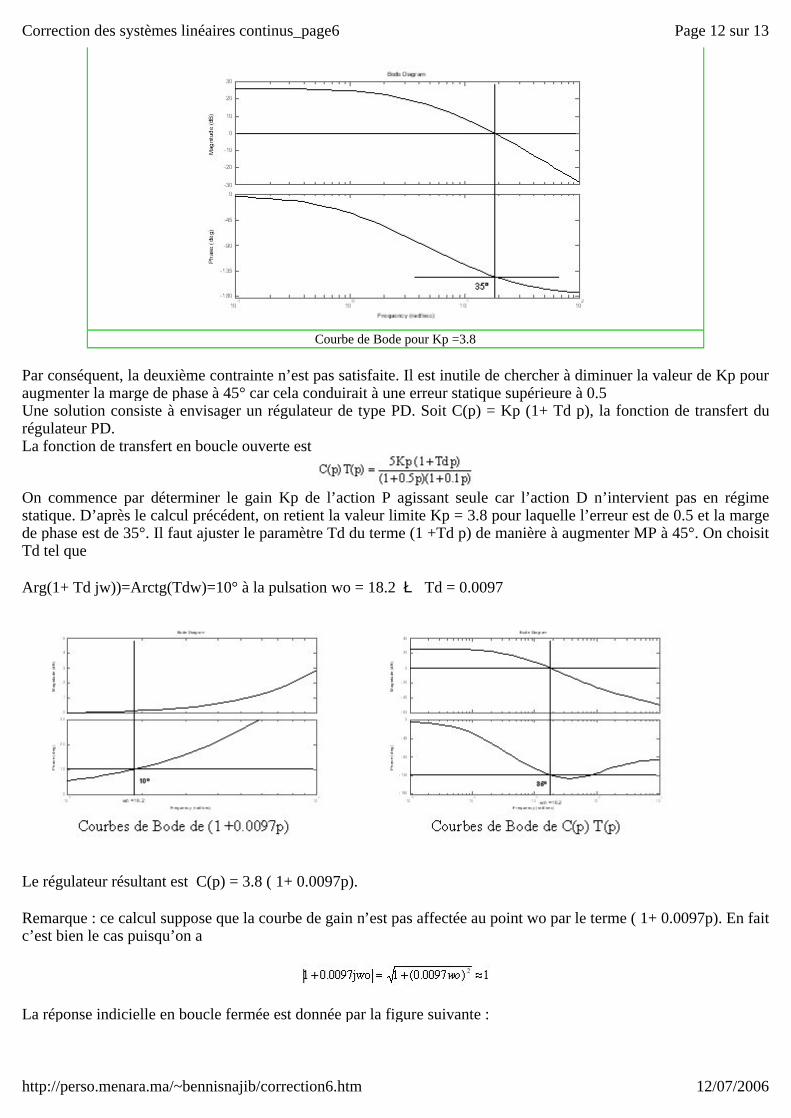
L’erreur indicielle en régime permanent est < 0.5 è Kp > 3.8 Pour la valeur minimale de Kp = 3.8, on vérifie si la contrainte sur la marge de phase est satisfaite :
è De l’équation (1), on déduit que wo = 18.2 et de l’équation (2), on déduit que la marge de phase est de 35°, comme le montre la figure suivante :
Page 11 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
Par conséquent, la deuxième contrainte n’est pas satisfaite. Il est inutile de chercher à diminuer la valeur de Kp pour augmenter la marge de phase à 45° car cela conduirait à une erreur statique supérieure à 0.5 Une solution consiste à envisager un régulateur de type PD. Soit C(p) = Kp (1+ Td p), la fonction de transfert du régulateur PD. La fonction de transfert en boucle ouverte est
On commence par déterminer le gain Kp de l’action P agissant seule car l’action D n’intervient pas en régime statique. D’après le calcul précédent, on retient la valeur limite Kp = 3.8 pour laquelle l’erreur est de 0.5 et la marge de phase est de 35°. Il faut ajuster le paramètre Td du terme (1 +Td p) de manière à augmenter MP à 45°. On choisit Td tel que
Arg(1+ Td jw))=Arctg(Tdw)=10° à la pulsation wo = 18.2 è Td = 0.0097
Le régulateur résultant est C(p) = 3.8 ( 1+ 0.0097p).
Remarque : ce calcul suppose que la courbe de gain n’est pas affectée au point wo par le terme ( 1+ 0.0097p). En fait c’est bien le cas puisqu’on a
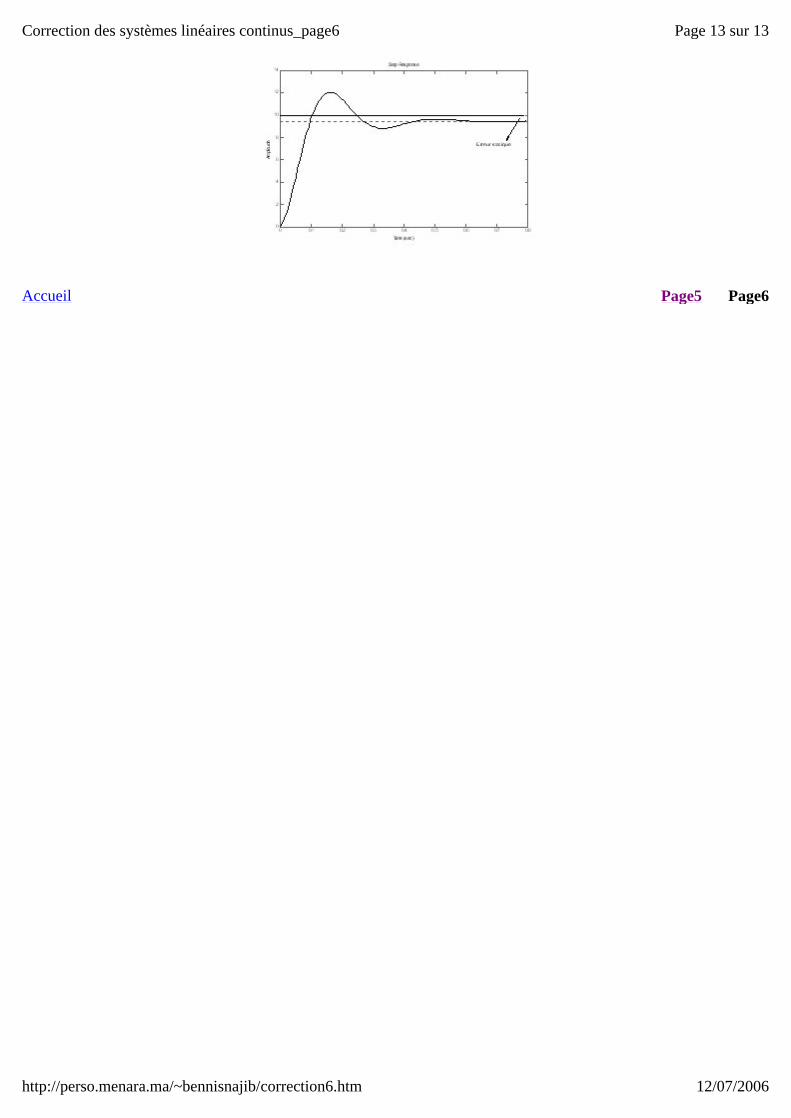
La réponse indicielle en boucle fermée est donnée par la figure suivante :
Courbe de Bode pour Kp =3.8
Page 12 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm
Accueil Page5 Page6
Page 13 sur 13Correction des systèmes linéaires continus_page6
12/07/2006http://perso.menara.ma/~bennisnajib/correction6.htm





























