Embed Size (px)
Citation preview
244
~,,CUEILS ET DIVERSITY, DES TRAITEMENTS ADAPTATIFS D'ANTENNE par
Henr i MERMOZ Ing6nieur g6n6ral des t616communications *
R~SUMg. - - La construction d'une anlenne adaptative ]onctionnant en temps rdel peut manquer compldlement son but si l'on ne respecte pas une r~gle essentielle sur l'dlimination du signal de eertaines parties du traitement. Cet article explique pourquoi celte r~gle est ndcessaire et donne des indications sur les diverses lar de
l' appliquer.
PLAN. - - I : Introduction. e 2 : Degr~ de liberld de l'optimalisation. �9 3 : Signaux identiques et signal unique, �9 4 : Introduction de l'adaptativit& �9 5 : Ecueil [ondamental de l'adaptativitd. �9 6 : Cas particulier de compatibilitd : bande dtroite. �9 7 : Compromis possible & bande large. �9 8 : Inversion de la matrice de
corrdlation. �9 9 : Conclusion. Bibliographie (7 r6f.).
I N T R O D U C T I O N
Le probl~me de l ' an t enne de r~ception adapta t ive a d~pass6 le stade de l 'explorat ion th6orique. De nombreux chercheurs et techniciens se sont aujour- d 'hui familiaris6s avec les id6es de base. Quelques
an tenncs adapta t ives fonc t ionnan t en temps r&l ont 6t6 r6alis6es, ainsi que de nombreuses simulat ions sur ordinateur . Les unes et les autres conf i rment sans aucun doute possible l ' avan tage de l ' a n t e nne
adapta t ive sur l ' anterme classique. Cependant les modes de r~alisation res tent tr~s divers. C'est un des aspects de eette th6orie que d 'accepter un grand hombre de sch6mas fonctionnels ~qu iva len t s ; de plus, pour chaque sch6ma fonctionnel , plusieurs technologies analogiques ou num6riques peuven t 6tre propos&s. II en r~sulte un certain t f i tonnement - - d'ail leurs f ruc tueux - - et aussi quelques m~comptes. Peut-Stre est-ce le m o m e n t de revenir sur la pat t ie la plus d61icate des principes de base : h savoir la n~cessit~, sous peine de contre-performance grave, de bfitir le t r a i t emen t adapta t i f en dliminant le signal (non pas de la sortie, bien stir, off on veut au contraire le faire apparaRre) mais de certains 6tages interm6- diaires, off il (~ pollue ~> le r&u l t a t cherch~. C'est ce que l ' au teur a appel~ dans des publ icat ions pr~c6- dentes [1], la condi t ion de r~ldrence bruit seul, dont le sens s'6claireira darts la suite.
En m~me temps cet article souligne au passage la diversit6 des schemas fonctionnels possibles.
i . R A P P E L S
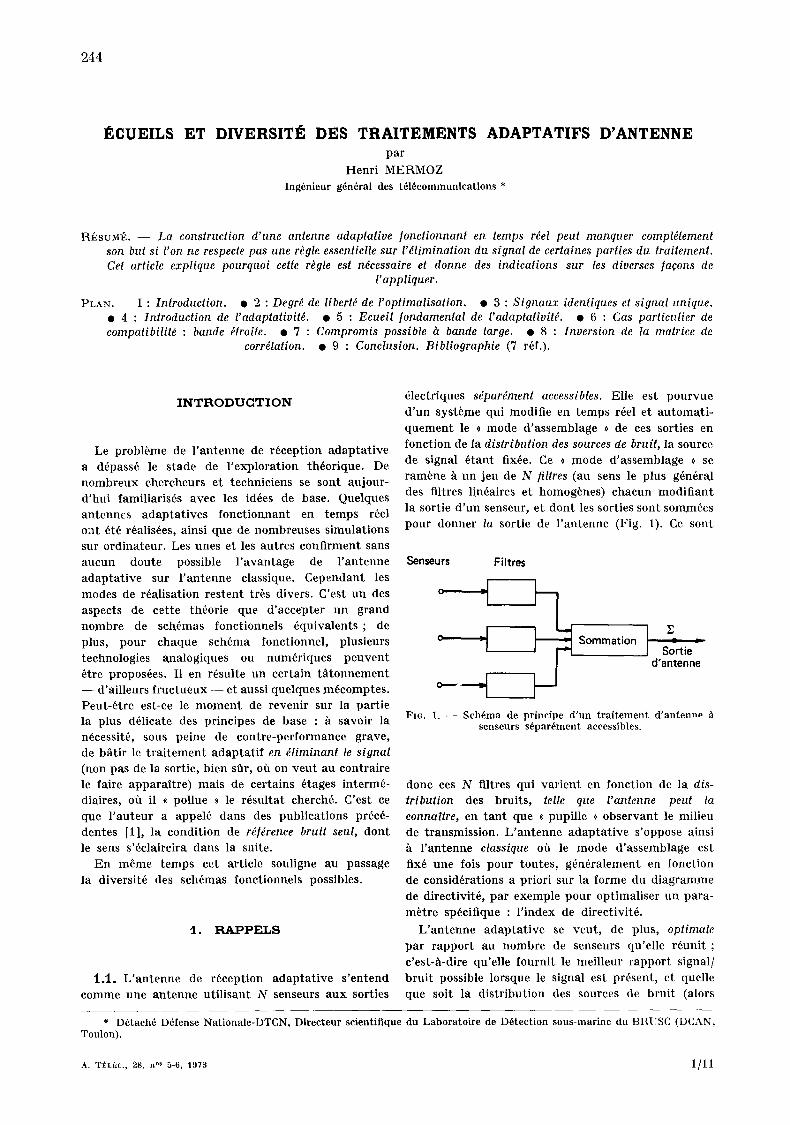
1.1. L ' a n t e n n e de r6ception adapta t ive s ' en tend comme une an t enne u t i l i san t N senseurs aux sorties
6lectriques sdpardment accessibles. Elle est pourvue
d ' un syst~me qui modifie en temps r6el et au tomat i - quement le ~ mode d 'assemblage ,~ de ces sorties en fonct ion de la distribution des sources de bruit, la source de signal 6tant fix&. Ce (~ mode d 'assemblage ,~ se
ram~ne h un jeu de N filtres (au sens le plus g6n~ral des filtres lin6aires et homog~nes) chacun modi f ian t la sortie d ' u n senseur, et dont les sorties sont somm6es pour donner la sortie de l ' an t enne (Fig. 1). Ce sont
Senseurs Filtres
c _[
c - I Sommation I I So ie-
d'antenne
FIG. 1. - - S c h e m a d e p r i n c i p e d ' u n t r a i t e m e n t d ' a n t e n n a h s e n s e u r s s 6 p a r 6 m e n t a c c e s s i b l e s .
donc ces N filtres qui varier~t en fonction de la dis- Iribution des bruits , telle que l'antenne peut la
connaHre, en t a n t que (~ pupille , observant le milieu de t ransmission. L ' a n t e n n e adapta t ive s'oppose ainsi
l ' an t enne classique off le mode d 'assemblage est fix6 une lois pour toutes, g6n6ralement en fonction de consid6rations a priori sur la forme du diagramme de directivit6, par exemple pour optimaliser un para-
m~tre sp6cifique : l ' index de directivit6.
L ' a n t e nne adapta t ive se veut , de plus, oplimale
par rappor t au hombre de senseurs qu'elle r6uni t ; c 'est-h-dire qu'elle fourni t le meil leur rappor t signal/ b ru i t possible lorsque le signal est pr6sent, et quelle que soil la d is t r ibut ion des sources de bru i t (alors
* D6tach6 D6fense Nationale-DTCN, Directeur scientifique Toulon).
d u L a b o r a t o i r e d e D 6 t e c t i o n s o u s - m a r i n e d u B R U S C ( D C A N ,
A. T~L~C., 28, n ~ 5-6, 1973 1/11
H. MERMOZ. ECUEILS ET DIVERSlTI~ DES TRAITEMENTS ADAPTATIFS D ' A N T E N N E 245
que l ' index de directivit~ maximal n ' es t opt imal que dans le b ru i t omrfidirectionnel).
Enf in la th6orie montre que la (( d is t r ibut ion des sources de b r u i t , est exhaus t ivement conteRue - - au mieux de ce que l ' an t enne peut en connai t re - - dans la matr ice de correlation mesur~e aux sorties des senseurs.
Nous reviendrons plus tard sur l ' adapta t iv i t~ elle- m6me. Rappelons d 'abord les condit ions d'optimalit~
des filtres.
1.2. En conservant les nota t ions d6jh utilis6es
([1] p. 38 ~ 40) rappelons que la source-signal est ponctuelle ; sa d6finition spatiale (sa direction ou sa posit ion ~ distance finie) est connue, et de m6me, sa d6finitiorl temporelle ou spectrale. Deux cas sent possibles mais relbvent du m6me formalisme.
a) Le signal 6mis par la source est non al6atoire (6cho de radar ou de sonar actif). On en connaR alors un mod~le norm~ (d'6nergie unit6)
So(t) ~ So(V) .
Les s ignaux r6els so r t identiques au mod61e h u n facteur d 'ampl i tude pros, a, et ~ un retard pros z, tous deux inconnus :
a So( t - - ~) ~- a s0(v ) e - 2 n i w .
En t re la source et la sortie d u / e senseur, le t ransfer t est repr6sentable par u n filtre lin6aire de gain complexe ~j (v) 6galement connu.
Pour un signal identique au mod61e qui serait envoy6 par la source, le signal it la sortie du/ 'e seuseur serait :
So(V)~j(v) .
Le filtre ~j (v) repr6sente essentiel lement, en pra- t ique, le retard de parcours entre la source et le
senseur, mais il englobe 6galement une 6ventuelle a t t6nuat ion s61ective du milieu, une diffraction 6ventuelle sur l ' an t enne et ta travers6e du senseur lui-m6me. C'est l 'ensemble des ~j (v) qui const i tue la ddfinition spatiale du signal.
OR appelle alors matrice-sigrml s, la matrice-l igne
s = so(v) [~l(v), ~ v ) ... ~N(v)],
soit plus s implement * r s so(v ) .
Les caract~res gras d6siguent les matrices par opposition aux scalaires, et le signe* d6signe l ' imagi- naire conjugu~.
b) Le signal 6mis par la source est une fonction al6atoire (sonar passif) ; on connai t alors sa densit6 spectrale normde c'est-h-dire la forme du spectre :
z0(v) .
Le signal r6el, s'il est pr6sent, it la m6me densit6
spectrale f i u n facteur de puissance pros, a ~ soit :
Pour un signal ident ique au mod61e (a = 1) la densit~ spectrale croisde (transform6e de Fourier de la fonction d'intercorr61ation) aux sorties de /e et k e senseurs est donn6e par la relation classique :
%(v) ~j(v) ~0~(v),
ce qui permet d'6crire la matrice d'intercorrglation du signal aux sorties des senseurs sous la forme
~0(v) ~ ~o*,
off le signe - d6signe la matrice transpos6e. Si on pose alors, pour d~finir la matrice-l igne-signal :
s = [ ( y o ( V ) ] l / 2 ~ * ,
on ram~ne la matr ice d ' intercorr6lat ion
$ + $
oh s + est la transpos6e-imaginaire conjugu6e de s. Cette matrice est d 'ordre N, de rang 1, et, comme
toute matr ice de corr61ation, hermi t ienne d~fiuie positive.
1.3. Les N brui ts sent repr6sent6s par leur matr ice de densit6 spectrale y den t l'616ment
~.j k(v)
est par d~finition la densit6 spectrale crois6e des deux bruits aux sorties de ]'e et du k e senseur. Insistons sur le fait que y e t les yjk (v) ne repr6sentent que les bruits seuls et non le sigrml + brui t , en cas de presence de signal. La matrice y est d 'ordre N ; elle est hermit ienue d6fitlie positive et g6n6ralement de rang N.
1.4. I1 est 6galement admis que, si les brui ts sent intercorr616s entre eux, le signal est ind~pendant
de tous les bruits. Darts ces condit ions la th6orie montre que le syst~me de N filtres op t imaux est repr6sent~ par la matrice-l igne h den t les 616ments hj (v) sent les gains complexes. Cette matr ice se d6duit des donn6es du probl~me par
(1) h - - k s y -1 ,
off k est uu scalaire arbi traire mais non [onction de
v. ([1] p. 30 et 31). La (~ performance ~) du prec6d6 (rapport s ignal /brui t dans le cas g6n6ral et rappor t de vraisemblance dans le cas gaussien) est maximale lorsqu 'on applique les filtres pr6c6dents. Elle s 'exprime par
/7 (2) r = (s y-1 s +) dr .
La fonction de ,
(3) p(v) = S y--1 S.{-
est r~elle et non n~gative. Le fait que r e s t max imal implique donc que • (v) est maximal h route fr6quence
([1] p. 38-40). On mont re que p (v) est pr~cis6ment
2/11 A, T~L~C,, 28, n ~ 5-6~ 1973
246 H MERMOZ. -- ~CUEILS ET DIVERSITY, DES TRAITEMENTS ADAPTATIFS D'ANTENNES
la va leur maximalis6e du rapport des densitds spec- trales de signal el de bruit sur la sortie de l ' antenne.
Cette propri6t6, qui est, de toute fa~on, ex t r6mement
intui t ive, est une condit ion ndcessaire mais non suffi-
sante de l 'opt imal isa t ion.
2. D E G P ~ D E L I B E R T I ~ D E L ' O P T I M A L I S A T I O N
2.1. Nous a]lons ma in t enan t d6montrer rapi-
dement une propri6t6 qui est h la base, au fond, de la
diversit6 des r6alisations possibles du t r a i t em en t
adap ta t i f d 'an tenne .
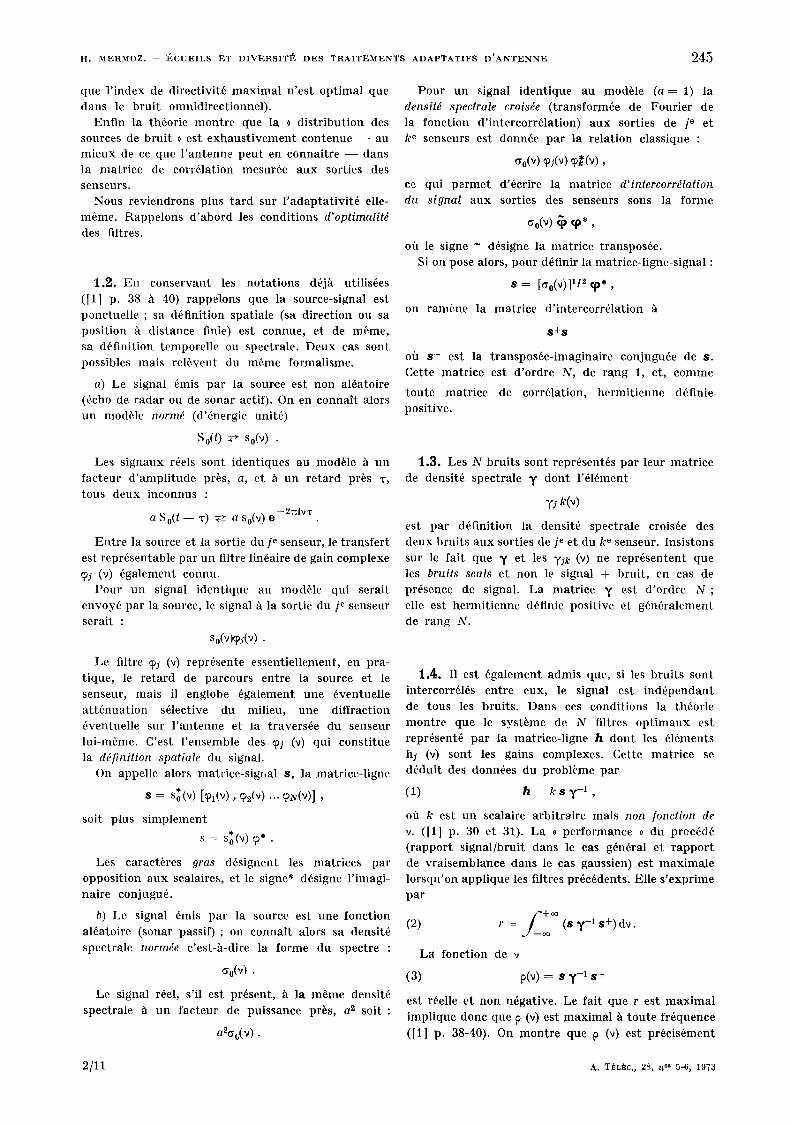
Le r~sultat du traitement optimal d'anlenne est indd-
pendant d'une matrice de filtres arbitraire lransformant les entrdes originales.
L'expression <~ matr ice de filtres ,) est illustr6e par
la figure 2. Le mot ~( filtre ~ s 'y entend au sens le
plus large, en y ineluant potent iombtres , d6phaseurs,
Les nouveaux filtres sont par d6finition :
(6) H = k S r -1
et la nouvelle per/ormance, homologue de p(v) est
h pr6sent :
(7) P(v)---- s r l s §
Or, on a pr6cis6ment :
(8) P(v) = p (v ) .
En effet, pourvu que la matr ice inverse m -1 soit
d6finie :
(9) P(v) = $ r - 1 S§ = s m [ m + y m ] -1 m + s + ,
: s [ m m - J ] y-i [m+]-i r e + s + ,
= S y - 1 S + ,
ce qui d6montre (8).
Le nouveau t r a i t emen t reste done opt imal par
rapport aux s ignaux el aux bruits originaux.
La matr ice m doit 6tre non singuli~re h tou te fr&
quence, mais elie reste l a rgement arbitraire. Elle
peu t 6tre, en part iculier , un produi t de matr ices non
singulibres.
Entr6es originales
(Sorties des
senseurs)
Sorties (Nouveaux signaux, nouveaux bruits)
FIG. 2. ~ Matrice de filtrage.
3. SIGNAUX IDENTIQUES ET SIGNAL UNIQUE
3.1. Nous allons profi ter de cet te libert6 pour
effectuer des t ransformat ions des entr6es originales
qui pe rme t t ron t :
- - de me t t r e en 6vidence des propri6t6s gdndrales
du t r a i t emen t adapta t i f ,
- - de donner des exemples de moyens pra t iques
de le r6aliser.
ligne ~ retard, et 6ventuel lement les filtres (( iden-
t iques ,) (de gain unit6 ~ tou te fr6quence).
2 .2. Soit alors m une matr ice de filtres dont,
les 616ments my~ (v) sont les gains c o m p l e x e s ; on
l ' appl ique aux sorties des N senseurs.
La matr ice- l igne signal s devient , aux sorties de
]a mat r ice m :
(4) S = s m .
La mat r ice de corr6lation y des bruits parasi tes
devien t su ivant une expression classique [2] :
(5) r = m + y m ,
en res tan t hermi t ienne d6finie posi t ive bien entendu.
Appl iquons ma in t enan t le t r a i t emen t opt imal
aux n o u v e a u x s ignaux et aux nouveaux bruits.
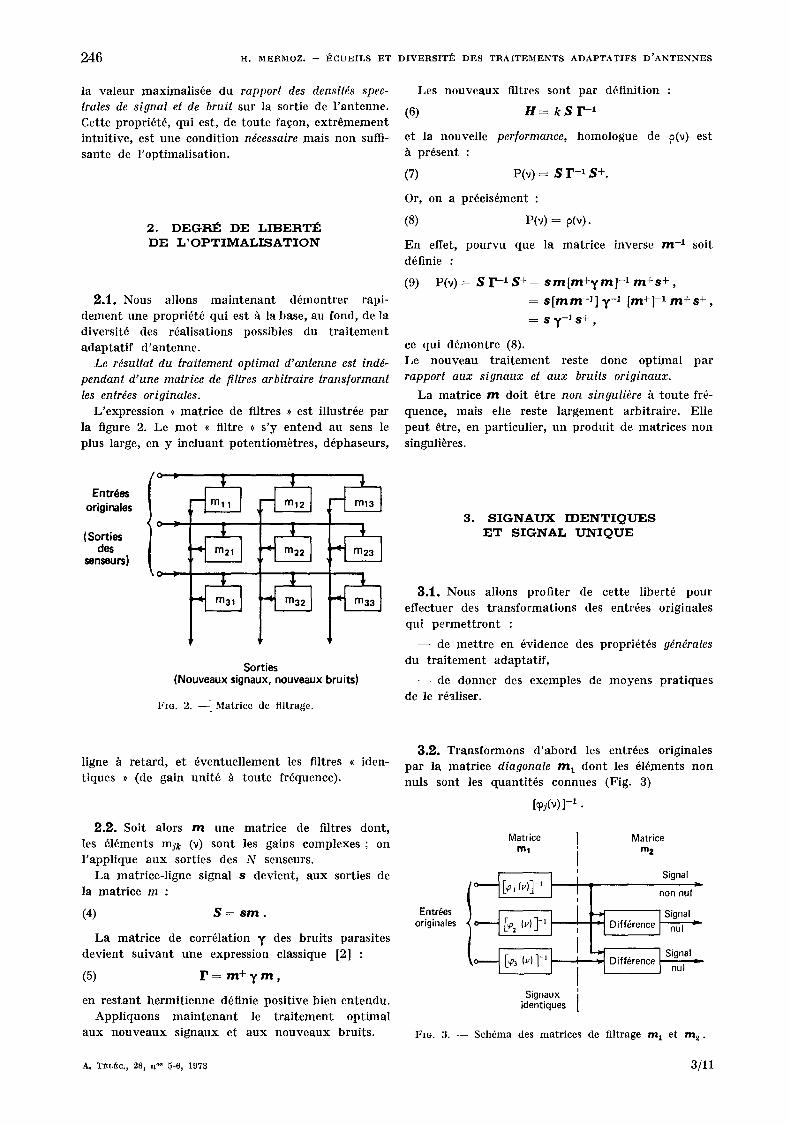
3.2. Transformons d 'abord les entrdes originales
par la matr ice diagonale m 1 dont les 616ments non
nuls sont ies quanti t6s connues (Fig. 3)
[?/~)]-~.
Matrice ] Matrice i 1111 ) m2
t Signal
originales [~2 (v)]-I i Diff&ence
[~3 (v)]-' ! giff&ence 1 Signal i "1 J n u l -
Signaux ' identiques [
FI~. 3. - - Sch6ma des matrices de filtrage m 1 et m 2 .
A. T~L~C,~ 28~ n~ 5-6, 1973 3/11

H. M E R M O Z . -- E C U E I L S E T D I V E R S I T ] ~ D E S T R A I T E M E N T S A D A P T A T I F S D ~ A N T E N N E 247
Cet t e t r a n s f o r m a t i o n r e v i e n t h inve r se r la d~finition
du signal (en gros, h (~ r a t t r a p e r ~) les t e m p s de pa rcour s
en t r e la source e t les sort ies de senseurs) e t pa r cons6-
q u e n t h se r a m e n e r ~ ]a source, c ' e s t -h -d i re d des signaux identiques h S o (t). Sous sa fo rme un peu
a b s t r a i t e ce t t e op6ra t ion g6n6ralise, en fa i l , ce q u ' o n
fa i t e o u r a m m e n t en 6gal i saut les r e t a rd s d ' u n e onde
p lane (ou sph6r ique) derr i6re un r6seau de senseurs .
On o b t i e n t alors, non pas e x a c t e m e n t S o (t) mais
le m 6 m e signal h un r e t a r d pros So(t - - %). Ce r e t a r d
~o ~ faei l i te ~ p r a t i q u e m e n t l ' invers ior t des ~%. (v)
mais ne joue aucun r61e dans la suite. Nous le n6gli-
geons donc pour al l6ger l '~cr i ture . N o u s avons done
affaire a u x sor t ies de la m a t r i e e m 1 h des s i gnaux
i den t i ques cer ta ins ou a l6atoires . L ' i n t e r p r 6 t a t i o n
p h y s i q u e p r6c6deu te a ide h a d m e t t r e que la m a t r i e e
mx n ' e s t pas, en g6n6ral, s ingulibre.
3.3. E n r e p a r t a n t des sort ies de m~ on t r a u s f o r m e
h p r e s e n t de la fa~on ci-apr~s (Fig. 3) :
- - - o n laisse la sort ie n o 1 inchang~e (f i l t re
iden t ique) ,
- - o n r emp lace la sor t ie n o 2 p a r sa dif ference
a v e c la sor t ie u ~ 1,
- - o n r emp lace la sort ie n o 3 p a r sa dif ference
a v e c la sort ie n o 1 etc. ,
- - on r emp lace la sor t ie n o N p a r sa dif ference
avec la sor t ie a o 1.
Ceci r e v i e n t h t r a i t e r les sor t ies de m~ p a r uue m a t r i c e
m s du t y p e :
~r12= 1 . 0
I1 est clair que m 2 n ' e s t pas singuli~re, que l que
soi t son ordre .
3 .4 . Au t e r m e de la t r a n s f o r m a t i o n g lobale non
siuguli~re,
l rn 1 D2 2
l~ m a t r i c e l igne-s igua l s es t devenue :
- - dans le cas de s i gnaux non a l~atoi res :
(10) S = s~(~) [1 , 0 ... 0] ;
- - d a n s le cas de s i gnaux a l~atoi res :
(10 bis) S = [O'(~(V)] 112 [ 1 , 0 . . . 0 ] .
Q u a n t ~ la m a t r i c e de co r re l a t ion des b ru i t s y elle
es t d e v e n u e
r = [ m ~ m 2 ] + y [ m l m 2]
t o u j o u r s h e r m i t i e n n e d~finie pos i t ive , e t n o n sin-
guli~re s i y ne l ' e s t pas.
3 .5 . Nous savons depu is le p a r a g r a p h e 2.2. que
nous res tons o p t i m a l p o u r les entr~es or ig inales eu
a p p l i q u a n t le t r a i t e m e n t o p t i m a l a u x sor t ies de m 2 .
N o t o n s que t ou t e s ces sort ies , saul la p remie re , son t
d e v e n u e s des (( r~f~rences b ru i t s seuls ~) du sys tSme,
c 'est-i~-dire qu ' e l l es ne son t pas modif ides p a r la p resence ~ven tue l le du s i g n a l N o t o n s enf in que la
m a t r i c e m s choisie ici p o u r sa s impl ic i t~ n ' e s t pas
la seule qu i o b t i e n n e ce r~sul ta t , ce qui laisse une
m a r g e d ' i n i t i a t i v e tr~s large a u x r6al i sa t ions p r a t i q u e s
(cf. w 5.6).
Nous devons donc a p p l i q u e r a u x sor t ies de m 2
les fi l tres repr~seut~s pa r
(6) H = K S r -~ .
Fa i sons K = 1 p o u r all~ger l '~cr i ture .
T o u s l e s au t re s scalaires (saul le f a c t eu r d ' a m p l i -
t u d e a que nous r e t r o u v e r o n s plus loin) c t lcs m a t r i c e s
~ tan t f onc t i on de v, nous ne le r e p r ~ s e n t e r o n t pus
d~sormais (saul p o u r le soul igner) . C o m p t e t e n u
de la v a l e u r de S, donn~e pa r (10) ou (10 bis), les
fi l tres o p t i m a u x s '~c r iveu t :
- - pour les s i gnaux non al~atoires :
(12) H 1 = s* o Cj I IA ,
- - p o u r des s i gnaux a l~atoi res :
(12 bis) H I = [aol 1/2 CA/A ,
off C A est le c o f a c t e u r de l '~ l~ment P j l de la m a t r i c e r ,
e t off A en est le d ( ! t e rminan t (r~el e t non n~gatif) .
La (( p e r f o r m a n c e ~) p r e u d alors la fo rme
(13) P s r - i s ~ = [So]2Cn/A, ou
(13 bis) P = S r -1 s + = (y0 czz[ A ,
off c n e s t le c o f a c t e u r de 1~11 c ' e s t -h -d i re le d~ter-
m i n a n t de la matrice de corrdIations des nouveaux
bruits n o 2, 3, N (qui son t des (( r~f~rences b ru i t seul ~)
du sys t~me original) . D o n c C n e s t r~el e t non n~gat i f .
Le s c h e m a du sys t~me h p a r t i r des sort ies m s
(Fig. 3) es t doan~ p a r la figure 4, off l ' o n r appe l l e
qu ' i l n ' y a de s ignal que sur l ' en t r~e n o 1.
~.w,~ Somme [
FIG. 4. - - F i l t r a g e H .
Z~. I N T I ~ O D U C T I O N D E L ' A D A P T A T I V I T ~
Cons t ru i re les fll tres /4/ p r6c6dents ne pose ra i t
a u c u n p rob l~me si on conna i s sa i t a priori la m a t r i c e
y e t pa r c o n s 6 q u e n t r .
4/11 A. T~L~C., 28, n ~ 5-6, 1973
248 H. MERMOZ. -- ~CUEILS ET DIVERSIT]~ DES TRAITEMENTS ADAPTATIFS D'ANTENNES
Mais il s 'agit de ]es r6aliser de fa~on adaptat ive . Cela signifie qu 'on ne sait rien a priori sur y ou r , saul qu'elle varie au cours du temps ; on admet seu- lement que ces var ia t ions sont suffisamment lentes pour qu 'on puisse faire des est imations raisonnables des Flk (donc de Cjl ) en mesuran t en permanence les corr6]ations h la sortie des senseurs et en u t i l i san t pour ces mesures des constantes de temps suffisam- men t longues. La proc6dure adapta t ive est donc la suivante h premi6re rue :
a) ayan t appliqu6 les t ransformat ions m I et m 2 aux entr6es originales, on mesure - - ou p lu t6 t on estime, avec une constaute de temps forc6ment limit6e 0 - - les fonctions d' intereorr61ation entre les sorties de m 2 ;
b) on en d6duit (en temps r6el) des valeurs des PJk, puis en inversan t r (on verra qu ' en pra t ique
cette op6ration compliqu6e peut 6tre escamot6e, w 8) on en tire les valeurs des Cj l , de A e t des Hj ;
c) on applique ces filtres H 1 aux sorties de m~ su ivant la figure 4.
Nous admet tons que l ' es t imat ion des Pj~ est suffi- s amment correcte pour ne pas entra lner par elle- meme d 'erreur appr6ciable - - Montrons, que meme ainsi, on about i t dans le cas le plus g~ndral }t une esp~ce de conlresens : d lravers le sysldme prdcddent, le signal
signal s' efface lui-mgme.
5. I~.GUEIL F O N D A M E N T A L D E L ' A D A P T I V I T ] ~
5.1. Restons en, pour le moment , au cas du signal al6atoire, en principe s tat ionnaire , ou en tou t cas de tr6s longue dur6e devan t la constante de temps 0. Dans la proc6dure qui v ient d 'etre d6crite et lorsqu'il n 'g a pas de signal sur les entr6es originales (done pas de signal sur l 'entr6e n o 1 de la figure 4), les Flk sont mesur6s tels qu'i ls sont par d6finition, c'est- h-dire les densitds spectrales directes ou croisdes des bruits seuls.
Les filtres H 1 qu 'on en d6duit alors ne d6pendent 6videmment que des brui ts seuls. La densit6 spec- trale d o de bruit en l'absence de signal est donc sur la sortie, su ivant une relat ion elassique :
(14) d o = H r H § = 6 0 C l l ] A .
5.2. Si un signal st pr6sente aux entr6es originales il se t r adu i t sur l 'entr6e n o 1 de la figure 4 par une densit~ spectrale
a20" 0
off a est un faeteur d'amplitude arbitraire (non fonc-
tion de ~).
La mesure de PII est alors enlachde d'erreur ear on
ne mesure plus la densit6 spectrale du bruit n o I seul,
mais :
1~11 A- a ~ 6 0 .
Par contre t o u s l e s autres Utk res tent inchang6s puisque :
- - les autres entr6es ne sont pas (~ affect6es , par le signal,
- - l e signal est ind~pendant de t o u s l e s bruits .
5 .3 . L'expression du filtre H 1 est :
(15) H i = [6011] 2 C i l i a .
Les cofacteurs C11 ne con tenan t pas l'616ment F n res tent inchangds par la presence du signal. Ils restent , meme en pr6sence de signal, des (~ r6f6rences brui ts seuls ~). Par contre le d6 te rminan t A qui peu t s'6crire
A---- 1~11Cll -F F12C12 -}- ... F1NCIN
est , alt6r6 , par la pr6sence du signal et devient :
h -~- a 2 6 0 C l l .
Donc en prdsence de signal le filtre Hj mesur~ adap- tativement devient :
HI ~ ; = I + a 2 6 0 C l l / A '
soit
[6o1112 C/1]A (16) 3Ei = 1 + a 2 ($0 C l l ] A '
et ce sont ces filtres faux qui sont appliqu6s aux entr6es de la fgure 4.
5.4. Or la cons6quence en est grave. En effet :
a) la densit6 spectrale de signal h la sortie du syst~me est
ds= a2 ~o I ~ l 2
puisqu ' i l n 'a r r ive de signal que par l 'entr6e n o 1, soit :
Clll• _'? (17) ds = a 2 ff] ~ _~_ a2ff0 C l t / A / ] ;
b) la densit6 speetrale du bruit en presence de signal prend, sur la sortie la valeur :
H F H+
(1 Ji- a 2 6 0 C l l / A ) 2 '
c'est-h-dire
6o C l J h (18) dB = (1 + a 2 6 0 C i l I A ) 2 ;
c) la densit6 totale observ6e sur la sortie en presence
de signal est donc
(5" o C i l I A (19) d s + dB = 1 + a 2 6 0 C i l I A "
Le num6ra teur de cette fraction n 'es t autre que d o c'est-h-dire la densit6 spectrale du b ru i t de sortie en l'absence de signal. Quant au d6nominateur , off 6 o, C n et A sont r6els et non n6gatifs, il est sup6rieur
A, T~L~C,, 28~ nO, 5-6~ 197~ 5/11
H. M E R M O Z . -- ~ ; C U E I L S E T D I V E B S I T I ~ D E S T R A I T E M E N T S A D A P T A T I F S D ' A N T E N N E 249
h 1 h route fr6quence si petit que soil a 2 , c'est-h-dire si [aible qae soil le signal.
I1 en r6sulte done cette s i tuat ion paracloxale : pour une s i tuat ion stable des bruits, la proc6dure adapta t ive telle qu'elle a 6t6 d~crite, fail apparai t re sur la sortie un niveau de puissance totale plus [aible en presence de
signal qu'en l'absence de signal.
ds + d B < d a.
5.5. Le cas du signal non al6atoire est un peu plus nuanc6 et c'est peut-6tre 1/~ ce qui pr6te h une certaine confusion. On con~oit en effet que pour un signal :
a) trbs bref devant la constaute de temps 0,
b) faible, sur l 'entr6e n o 1 de la figure 4,
l ' es t imat ion de Fll soit fa iblemeat alt6r6e par l 'arriv6e du signal et que la proc6dure pr6c6dente puisse 6tre consid6r6e comme fi la lois adapta t ive et optimale. Ce n ' e s t ceperLdant q u ' u n mauvais compromis. Les s ignaux brefs t r anspor ten t moins d'6nergie que les longs. D 'au t re part , allonger la constante ~ limite la facult6 d ' adap ta t iv i t6 du systbme. Le signal ne peut qu 'a l t6rer le contraste opt imal de sortie entre pr6sence et absence de signal.
Ainsi l ' adapta t iv i t6 semble d6truire ellc-mdme,
to ta lement ou part ie l lement , le r6sultat de l 'opt ima- lit6. Dans le cas le plus g6n6ral, ces deux propri6t6s soul incompatibles.
On reste cependant sur l ' impression qu ' i l s'en /aut
de peu puisqu 'on peut s 'ar ranger pour qu 'un seul
616ment d 'une matr ice d 'ordre N soit alt6r6 par le signal.
La densit6 ao (v) est toujours celle du <~ module norm6 )) du signal, suppos6 connu. Si on cherche h mesurer
y adap ta t ivement , on mesure, en pr6sence de signal, y + a~ao et on retrouve facilement que :
ds + dB < d o �9
6 . G A S P A R T I C U L I E B D E C O M P T A B I L I T ] ~ B A N D E ~ . T R O I T E
6.1. Nous avons vu que les filtres Hj ne sont alt6r6s en JEj que par l ' interm6diaire du discr imant A. Les
cofacteurs Cjl sont des (~ r6f6rences brui t seul ~>. D 'au t re
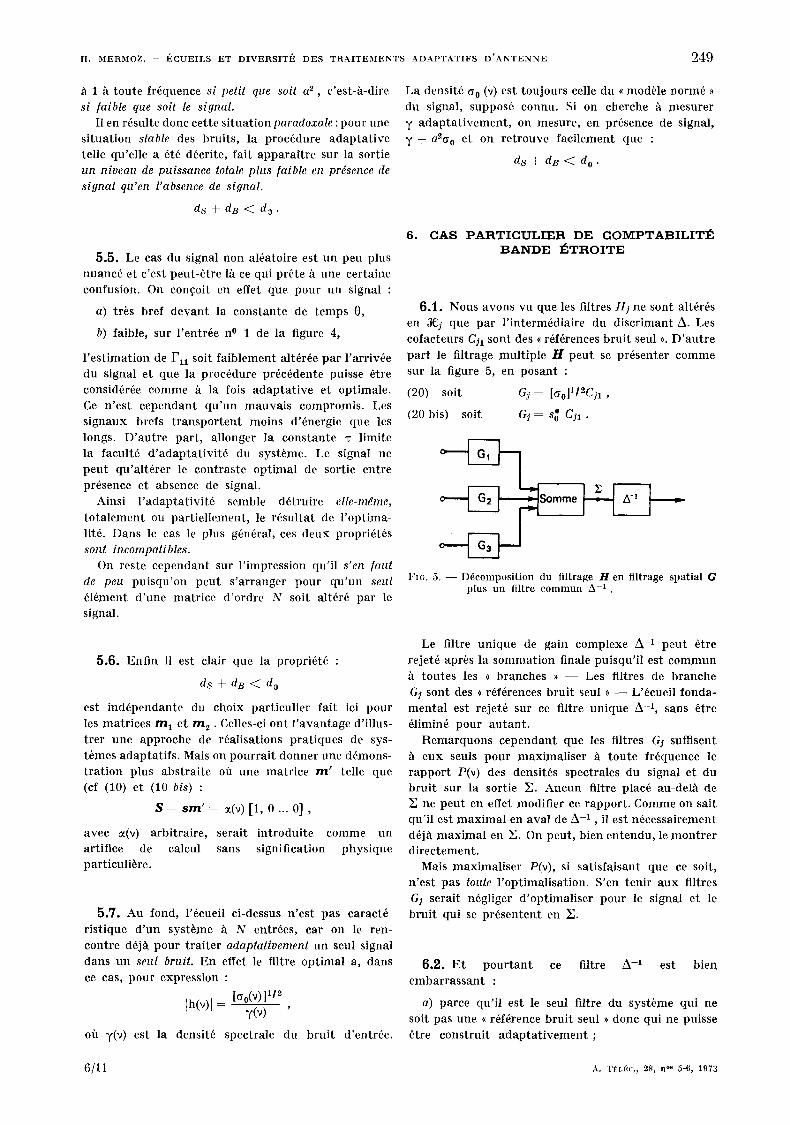
par t le filtrage mult iple H peut se pr6senter eomme sur la figure 5, en posant :
(20) soit G j = [(~o]l/2Cj1,
(20 bis) soit Gj = S~ C j l .
o
Fro. 5. - - D@omposition du filtrage H en filtrage spatial G plus un filtre eommun A-~.
5.6. Enf in il est clair que la propri6t6 :
ds + dB ~ d o
est ind6pendante du choix part iculier fail ici pour les matrices m 1 e t m 2 . Celles-ci out l ' avan tage d'illus- trer une approche de r6alisations prat iques de sys- throes adaptatifs . Mais on pourra i t donner une d6mons- t ra t ion plus abstrai te off une matrice rn' telle que (cf (10) et (10 his) :
S = s i n ' = a(v) [1, 0 ... O] ,
avee ~(v) arbitraire, serait in t rodui te comme un artifice de ealcul sans signification physique partieulibre.
5.7. Au fond, l '6cueil ci-dessus n 'es t pas caract6- ristique d ' u n syst~me ~ N entr6es, car on le ren- contre d6j~t pour t ra i ter adaptativement u n s e u l signal daas un seul bruit. E n effet le filtre opt imal a, dans
ce cas, pour expression :
Ih(')l [%(~)]1/2 7(~) '
off y ( ~ ) e s t la densit6 spectrale du bru i t d'entr6e.
Le filtre unique de gain complexe A -1 peut 6tre rejet6 aprbs la sommat ion fna le puisqu ' i l est commun
/~ toutes les ~ branches ~) - - Les filtres de branche Gj sont des (( r6f6rences brui t seul ~> - - L'6cueil fonda- menta l est rejet6 sur ce filtre un ique A -1, sans 6tre 61imin6 pour au tan t .
Remarquons cependant que les filtres Gj suffisent eux seuls pour maximaliser h route fr6quence le
rappor t P(v) des densit6s spectrales du signal et du bru i t sur la sortie Y~. Aucun filtre plac6 au-delh de Y, ne peut en effet modifier ce rapport . Comme on sait qu ' i l est maximal en ava] de A-1, il est n6cessairement d6jh maximal en Y,. On peut, bien entendu, le mont re r directement.
Mais maximaliser P(v), si satisfaisant que ce soit, n ' es t pas route l 'opt imal isat ion. S'en tenir aux filtres G i serait n6gliger d 'opt imaliser pour le signal et le b ru i t qui se pr6sentent en Y,.
6.2. Et p o u r t a n t ce filtre A -1 est bien embarrassan t :
a) parce qu ' i l est le seul filtre du systbme qui ne soil pas une (( r6f6rence bru i t seul ,) donc qui ne puisse
6tre construi t adap t a t i vemen t ;
6/11 A, T~Lt?C., 28, n ~ 5-6, 1973
250 n . M E R M O Z . -- ] ~ C U E I L S E T D I V E R S I T ~ D E S T R A I T E M E N T S A D A P T A T I F S D ' A N T E N N E S
b) parce que si la matr ice r devient siuguli~re,
ce filtre n ' e s t plus d6fini (A = 0). Or c'est j u s t emen t le cas off le gain du syst6me optimal par rappor t
l ' an t enne classique est consid6rable puisqu ' i l est lh~oriquement infini. I1 suffit, pour le voir, de se reporter h l 'expression de la performance
(3) p(v) = S y - t S+,
o n
(7) P(v) = S r -~ s + .
ces expressions sont des quot ients par le d6ter- m i n a n t de la matrice, de quant i t6s qui res tent fiuies
lorsque cette matr ice devient singuli6re. Donc p e t P deviennent alors infinis (bruits 61iminables, cf
[11).
6.3. II est heureusement un cas - - tr6s vaste - - off le dilemme pr6c6dent se r6sout de lui-m6me. Toutes les fois qu 'on peut consid6rer que la valeur de A (v) n'est plus /onction de la fr~quence ou ne varie pas de fa ;on significative avec cette fr6quence, il devient
abso lument 16gitime de supprimer pu remen t et sim- p lement le filtre A-~ de la figure 5. En effet ce ~, filtre ~ devient un simple potent iom6tre (A est r6el et non n6gatif), et le gain non s61ectif qu ' i l pourra i t afficher entre darts la valeur du coefficient K, arbi traire du paragraphe 1-4. Son affichage cesse d'etre une condition d'oplimalit~.
Or dans tous les probl~mes dits (( ~ bande 6troite , off les s ignaux sont h bande relative limit6e au tour
de v o
bande utile 1/10,
fr6quence centrale v o
le probl~me de l ' an t enne adapta t ive se simplifie d 'une
dimension. Les filtres H et G dev iennent des nombres
complexes. Construits adap ta t ivement , ils se ram~nent ehacun (dans une image analogique qui n 'engage en rien le type de r6a]isation) ~ un circuit de d6pha- sage et h u n potent iom~tre tous deux pilot6s par la (( b o r e noire ~) off s'61aborent leurs valeurs en fonction des l~jk. Ceux-ei m6mes sont r6duits h des nombres complexes. Dans ces condit ions A-~ se ram~ne h u n hombre r6el positif. Cessant d'~lre une /onction de la fr~quence, il cesse d'etre indispensable ~ l'optimalitd du syst~me. Du m~me coup on s 'affranchit de la difficult6 inh6rente aux singularit6s de la matr ice
y o u r . Donc h bande dtroile c'est-h-dire en prat ique dans
le cas du radar, du sonar actif et des t616communi-
cations hertzienues, il y a compatibilitd [ormelle entre optimalit~ el adaptalivitd et l '6cueil fondamen- tal disparat t si on n6glige le filtre A-Z.
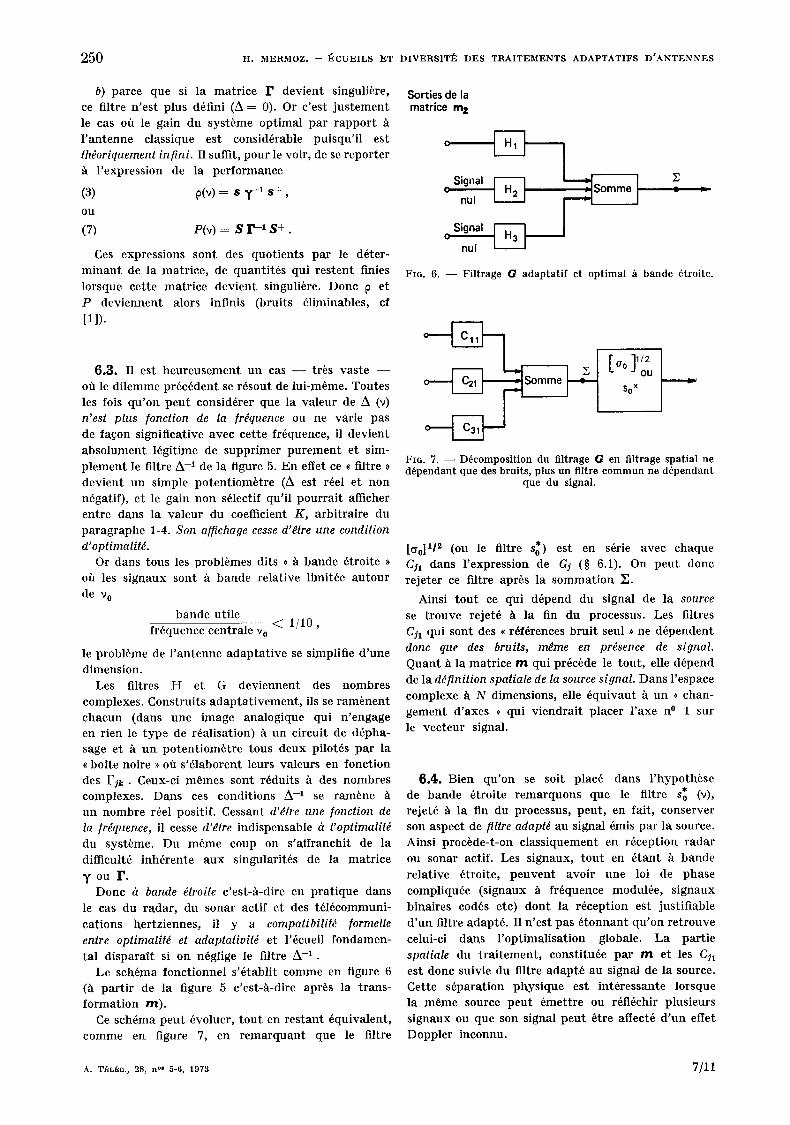
Le sch6ma fonct ionnel s '6tabl i t comme en figure 6 (h par t i r de la figure 5 c'est-h-dire apr~s la t rans-
format ion m) . Ce sch6ma peut 6voluer, tou t en res tant 6quivaleut ,
comme en figure 7, en r emarquan t que le filtre
Sorties de la matrice m=
Signal ~ Z 0
nul
o Signal nul
Fro. 6. - - Filtrage G adaptatif et optimal h bande 6troite.
0
Oo ]1/2 OU
SO x
Fro. 7. - - D~composition du filtrage G en filtrage spatial ne d6pendant que des bruits, plus un filtre commun ne d6pendant
que du signal.
[~o]11 ~ (ou le filtre s*) est en s6rie avec chaque Cjl duns l 'expression de Gj (w 6.1). On peut donc rejeter ce filtre aprbs la sommat iou Z.
Ainsi tou t ce qui d6pend du signal de la source se t rouve rejet6 ~ la fin du processus. Les filtres
Cjl qui sont des (, r6fdrences b ru i t seul ,) ne d6pendent doric que des bruits, mdme en prdsence de signal. Quanta la matrice m qui pr6c6de le tout, elle d6pend de la ddfinition spaliale de la source signal. Duns l 'espace
complexe ~ N dimensions, elle 6quivaut ~ un (~ chan- gement d 'axes ,) qui v iendra i t placer l 'axe u ~ 1 sur
le vecteur signal.
6.4. Bien qu 'on se soit plac6 darts l 'hypoth~se de bande 6troite remarquons que le filtre s o (v), rejet6 ~ la fin du processus, peut , en fail, conserver son aspect de filtre adaptd au signal 6mis par la source. Ainsi proc~de-t-on classiquement eu r6ception radar
ou sonar actif. Les signaux, tou t en 6rant ~ bande relative 6troite, peuven t avoir une loi de phase compliqu6e (signaux fi fr6quence modul6e, s ignaux
binaires cod6s etc) dont la r6ception est justif iable d ' u n filtre adapt6. I1 n 'es t pus 6 tonnan t qu 'on retrouve celui-ci dar~s l 'opt imal isa t ion globale. La part ie
spatiale du traitement, constitu6e par m e t les Cjl est doric suivie du filtre adapt6 au signal de la source. Cette s6paration physique est int6ressante lorsque la m6me source peut 6mettre ou r6fl6chir plusieurs signaux ou que son signal peu t 6tre affect6 d ' u n effet
Doppler inconnu.
A. T~L~C., 28, n ~ 5-6, 1973 7/11
H. M E R M O Z -- E C U E I L S E T D I V E R S I T ~ D E S T B A I T E M E N T S A D A P T A T I F S D ' A N T E N N E S 251
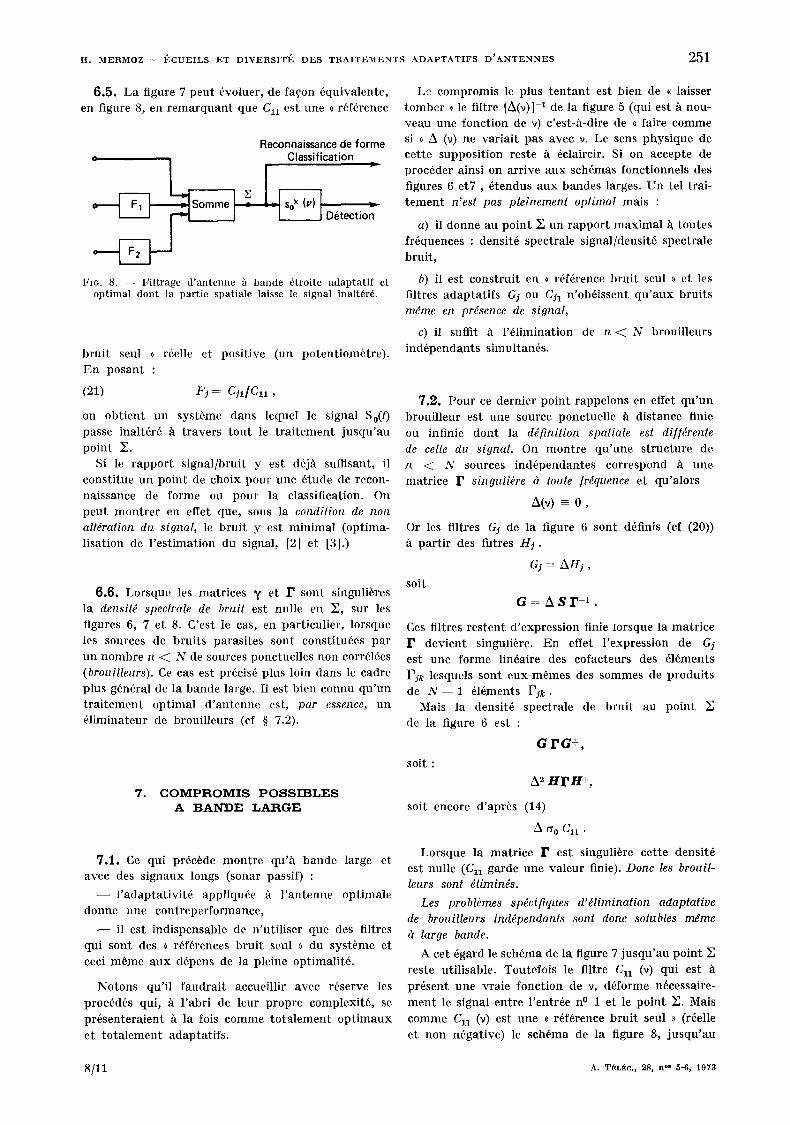
6.5. La figure 7 peut 6voluer, de fa~on 6quivalente, en figure 8, en r emarquan t que C n est une ~( r6f6rence
Reconnaissance de forme Classification
D6teetion
FIG. 8. - - Filtrage d'antenne fi bande 6troite adaptatif et optimal dont la partie spatiale laisse le signal inalt6r6.
brui t seul ~> r6elle et positive (un potentiom6tre) . E n posant :
(21) F j : C ] I / C l l ,
on obt ient un syst~me dans lequel lc signal S0(l ) passe inalt6r6 ~ travers tou t le t r a i t emeu t jusqu ' au point E.
Si le rappor t s ignal /brui t y cst d6jfi suffisaut, il consti tue u n point de choix pour uric 6tude de recon- naissance de forme ou pour la classification. On peut mont re r en effet que, sous la condition de non altdration du signal, le brui t y est min imal (optima- lisation de l ' es t imat ion du signal, [2] et [3].)
6.6. Lorsque les matrices y et r sont singuli6res la densitd speclrale de bruit est nulle cn Z, sur les figures 6, 7 et 8. C'est le cas, en particulier, lorsque lcs sources de brui ts parasites sont constitu6es par
un nombre n < N de sources ponctuelles non corr616es (brouilleurs). Ce cas est pr6cis6 plus loin dans lc cadre plus g6n6ral de la bande large. I1 est bien connu qu ' un t r a i t emcn t optimal d ' an t enne est, par essence, un 61iminateur de brouillcurs (cf w 7.2).
7 . G O M P R O M I S P O S S I B L E S
A B A N D E L A B G E
7.1. Ce qui pr6c6de montre qu'it bande large et avec des s ignaux longs (sonar passif) :
- - l ' a d a p t a t i v i t 6 appliqu6e h l ' an t enne optimale donne une contreperformance,
- - il est indispensable de n 'ut i l iscr que des filtres qui sont des (( r6f6rences bru i t seul ~) du syst~me et ceci m6me aux d6pens de la pleine optimalit6.
Notons qu ' i l faudra i t accueillir avec r6serve les
proc6d6s qui, h l 'abr i de leur propre complexit6, se
pr6senteraient h la fois comme to ta lement op t imaux
et to ta lement adaptatifs.
Le compromis le plus t e n t a n t est bien de (, laisser tomber }~ le filtre [A(v)] -1 de la figure 5 (qui est h nou- veau une fonct ion de v) c'est-h-dire de (~ faire comme si ~> A (v) ne var ia i t pas avec v. Le sens physique de cette supposition reste ~ gclaircir. Si on accepte de proc6der ainsi on arrive aux sch6mas fonctionnels des
figures 6 e t 7 , 6tendus aux bandes larges. Un tel trai- t emen t n'est pas pleinement optimal m a i s :
a) il donne au point Y, un rapport maximal ~ toutes fr6quences : densit6 spectrale signal/densit6 spectrale brui t ,
b) il est construi t en (~ r6f6rence bru i t seul ~} et les
filtres adaptat ifs G i o u Cjl n'ob6issent qu ' aux brui ts mgme en presence de signal,
c) il suffit ~ l '61imination de n < N brouilleurs
ind6pendants simultan6s.
7.2. Pour ce dernier point rappelons en effet q u ' u n brouil leur est une source ponctuelle h distance finie
ou infinie dont la d~finition spatiale est di/fdrenle de celle du signal. On montre qu 'une s t ructure de n < N sources ind6pendantes correspond ~ une matr ice r singulidre & route /r~quence et qu'alors
A(v) - 0 ,
Or les filtres 6j de la figure 6 sont d6finis (cf (20)) par t i r des fi~tres H j .
Gj= AHj,
soit
G = A s r - t .
Ces filtres res tent d 'expression finic lorsque la matricc r devient singuli~re. En effet l 'expression de G i
est une Iorme lin6aire des cofacteurs des 616ments l~3.k lesquels sont eux-m6mes des sommes de produi ts
de N - - 1 616merits l~lk. Mais la densit6 spectrale de brui t au point
de la figure 6 est :
a r a + , soit :
A 3 / t r / f + ,
soit encore d'aprbs (14)
A G o C n .
Lorsque la matrice r e s t singulibre cette densit6 est nulle (C n garde une valeur finie). Doric les brouil- leurs sont dlimin~s.
Les probldmes sp~cifiques d'dlimination adaptative de brouilleurs ind~pendants sont donc solubles mgme
large bande.
A cet 6gard le sch6ma de la figure 7 jusqu ' au point F,
reste utilisable. Toutefois le filtre C n (v) qui est h
pr6sent une vraic fonct ion de v, d6forme n6cessaire-
men t le signal entre l 'entr6e n o 1 et lc point Z. Mais
comme C n (v) est une (~ r6f6rence bru i t seul }~ (r6elle et non n6gative) le sch6ma de la figure 8, j u squ ' au
8/11 h. T~LffC., 28, n ~ 5-6, 1973

252 H. MERMOZ. -- ]~CUEILS ET DIVERSITI~ DES TRAITEMENTS ADAPTATIFS D'ANTENNES
point Y;, 6tendu aux larges bandes et par cons6quent avec
Fj(v) = Cj1('9)/C11('9),
fourni t un dlimlnateur de N - - 1 brouilleurs avec signal
non alldrd.
8 . I N V E R S I O N D E L A M A T R I G E D E C O B B ~ L A T I O N
8.1. On se propose iei d ' ind iquer pourquoi et comment on peut 6viter d ' inverser une matr ice de corr61ation, c 'est-h-dire calculer di rectement ( e t e n
temps r6el) les filtres Cjl, cofacteurs de A [sinon A lui m~me, qui est soit inuti le (bande 6troite) soit inuti l isable (bande large)].
Nous avons vu qu ' i l est toujours possible de ramener un t r a i t emen t opt imal adapta t i f au cas off le signal
ne peut survenir que sur une seule er~tr6e que nous prenons pour entr6e n o 1. Repar tons donc de cette si tuation. En ver tu du paragraphe 2 nous avons toujours le droit de t ransformer nos N entr6es par une matr ice de filtres. Mais nous savons aussi que route op6rat ion adaptalive qui impliquerai t une mesure de la densit6 spectrale F n sur la branche n o 1, serait
dangereusement (, pollu6e ,) par la pr6sence du signal. Imposons nous alors de ne pas toucher ~ cette branche et de t ransformer seulement les N - 1 (, brui ts souls ,) des autres branches sur lesquels tou t filtrage lin6aire
adaptati/ est 16gitime. Au t r emen t dit l imitons la matr ice de t ransforma-
t ion h la forme
I 1 0 0 1 0 a b
0 c d
qu 'on 6crira plus g6n6ralement
1 0 10Tl o/1 T e s t une matr ice de filtres por t an t seulement sur les ( N - 1) (( brui ts seuls ,~.
8.2. Or, il serait particuli~remer~t agr6able que ces , brui ts seuls ,> fussent ind6pendants les uns des autres ( tout en conservant chacun une corr61ation avec le b ru i t de la branche n o 1, sans quoi tou t trai-
t emen t serait inutile). E n effet la matr ice r aurai t alors la forme
F l l 1712 F in ]
F21 F2g 0
Fal 0 Pas
et le cofacteur C h se r6duirai t au seul produi t de
l~lj par N - - 2 densit6s spectrales de (, brui ts seuls ,). Par exception, C n est 6gal au produi t de toutes les densit6s spectrales de bru i t seul.
Les choses seraient donc encore plus simples si ces densit6s spectrales de brui ts seuls 6talent routes
uni/ormes (au moins dans la bande utile) et toutes
amen6es h la m6me valeur, 8, constante avec la fr6quence.
Dans ces condit ions on aura i t
C11 = ~?r
(21) ] :7 (= 1, Cj t = F i j ( - - 1 ) i + 1 .
Comme 8 est, apr6s tout , une (~ constante tech- nologique )~ on peut la prendre 6gale h l 'uni t6 et le syst6me de filtres de la figure 7 se simplifie consi- d6rablement :
a) le filtre de la branche n o 1 est un filtre idcnt ique qui laisse passer le signal inalt6r6 jusqu ' en Y~;
b) le filtre Cjl de la ]e branche (] :/: 1) ne d6pend
que de l~h c'est-h-dire de l ' intercorr61ation entre cette branche et la premi6re.
Alors route l'op~ralion se famine d u n e somme d'opd-
rations inddpendantes chacune ne concernant que deux branches, la 1 re et la ]e (] =f= 1). I1 n'est donc
plus n~cessaire d'inverser la matrice r . Chacun des (~ doublets ~) pr6c6dents consiste h filtrer la ]e branche
par le filtre de gain complexe PlJ estim6 adapta t ive-
m e n t ea mesuran t la corr61ation entre cette branche et la premiere. Le r6sultat est ajout6 h ou retranch6 de cette premiere branche.
8.3. I1 reste ~ t rouver cette matr ice T qui permet t ra i t de remplacer l ' inversion de la matr ice r par des t rans- formations lin~aires de N - - 1 (( brui ts seuls )). Rap- pelons que, aux sorties de T ;
- - Les nouveaux brui ts doivent 6tre non corr616s,
- - l e u r densit6 spectrale doit ~tre uniforme et norm6e,
- - a u c u n e restr ict ion n 'es t opposable ~ ces op6- rat ions puisqu' i l s 'agit u n i q u e m e n t de brui ts souls.
Or la matr ice T existe, il eu existe m6me toute une classe. I1 est donc th6or iquement possible d 'obteni r le r6sultat pr6c6dent. Un mode op6ratoire a d6j~ 6t6 propos6 pour les syst~mes h bande 6troite [4] et un grand nombre de var iantes seront sans doute 6tudi6es.
L'existence de T d6rive de celle des ~, images ortho- gonales ~ de n bruits corr~16s ; cos images sont des brui ts non corr~lds obtenus/~ par t i r des brui ts or iginaux
pass6s par une matr ice de filtres ([5], chapitre V, p. 60,
h 68). Sans reprendre cette discussion en d6tail, rap- pelons en los points essentiels.
8.4. Soit Z la matr ice des densit6s spectrales (her- mi t ienne d6finie positive (HDP)) de n bruits. I1 s 'agit de t rouver une matrice T dont les 616merits T~e (~)
A. T~LI~C., 28, n ~ 5-6, 1973 9/11
H . M E R M O Z . -- ~ C U E I L S E T D I V E R S I T E D ~,S T R A I T E M E N T S A D A P T A T I F S D ' A N T E N N E S 253
seraient les gains complexes des filtres cherch6s. La
matr ice des densit6s spectrales des bruits aux sorties
de T e s t :
T+Z T .
L'ensemble des conditions exig6es pour T expr ime :
- - que T + Z T est diagonale,
- - que ses ~l~ments d iagonaux sont constants
avee v e t de m~me valeur.
A u n facteur pros sans signification, on dolt done avoir :
(2) T + Z T : I
le second membre ~tant la matr ice unit~.
Remarquons que s'il existe uae matr ice T o r4pondant
h eet te condition, tou te matr ice
T o U
off U est une matr ice unitaire (done ~ton singuli6re)
est aussi aec3ptable, car
(23) [ToU]+Z[ToU ] = U+[T+oU T o ] U = U+U = I .
Cette relat io~ explique la multip]icit~ des solutions
possibles car, bien entendu, T o existe.
8 .5 . L 'exis tence de T O est li6e aux propri6t6s des
matr ices hermit iennes telles que Z. Une telle matr ice
a n directions propres, orthogonales entre elles. Les
composants des vecteurs uni taires de ces directions
forment un tableau carr~ (n,n) qui est lui-m~me une
matr ice unitaire (~
~+~ : I ,
e t telle que
(24) a + Z a : D ,
off D est la matr ice diagonale des valeurs propres
(r6elles et non n~gatives) de Z. Les 61~ments ~ ( ~ )
de ~ peuven t ~tre consid~r~s comme les gains
complexes d 'une matr ice de filtrage. La relat ion
pr~e6dente expr ime alors que, si on t ra i te les n bruits
corr616s par la matr ice ~, on obt ient un ensemble
de n nouveaux bruits dont la malrice de correlation est D.
Donc les nouveaux bruits sont ind~pendants et leurs
densitSs spectrales sont les 616ments
Dz(~) �9
Ces nouveaux bruits sont les images orthogonales des anciens su ivant une expression d~jh employ6e.
La matr ice r est parfois appel~e matr ice de diago-
nalisation. Les ~l~ments ~.j sont fonctions des Zik
et par cons6quent constructibles adaptativement h par t i r de la mesure de ces Zjk.
Appelons h present
D-~I~
la nmtrice diagonale des ~16ments r6els
[D~] -11~ ,
il est clair que
D-U2 = [ D - 1 1 ~ ] + .
Posons alors :
T o : ~ D .
La relation (24) peut s'~crire :
(26) D I I ' ~ + Z t ~ D - 1 I 2 : D - 1 1 U D D - 1 1 2 = I ,
soit T o + Z T o : I .
Ainsi se t rouve ddfinie une matr ice T o ayan t la
propridtd recherch6e h par t i r des directions propres
et des valeurs propres de la matr ice Z. Les dldments
de T O sont donc adaptativement constructibles h par t i r
de ceux de Z.
8.6. En d6finitive le probl6me de l ' invers ion de
la matr ice r est remplac~ par celui de la
(~ diagonal isa t ion-normal isa t ion ~) de la matr ice Z,
ou, de fa~on plus physique :
- - p a r la recherche des images orthogonales des
N - - 1 <, bruits seuls ~),
- - par le (( lissage ~) du spectre de chacurL d 'eux.
Nous ne pouvons pas entrer ici darts le d~tail des
<~ astuces )) possibles pour obtenir ce r6sultat (que
ce soit de fa~on analogique ou num6rique, m~me en
res tant au plan des schemas fonctimmels). Soulignons
encore la richesse possible de cet te famille de proe~d~s
puisque toute matr ice
T : T o U
off U est une uni taire arbi traire, peut ~tre utilis6e.
On peut doric imposer des conditions suppl6men-
taires ~ T, par exemple d '6tre (( t r iangulaire , ; o rL
mont re alors qu 'on est ramen6 au proc6d6 de Gram-
Schmidt [4].
9 . C O N C L U S I O N S
- - II est essentiel, sous peine de contre-performance
f~cheuse, qu 'un syst6me d ' an tenne adap ta t ive se
conforme h la condit ion dite de (~ r6f6rence brui t seul ~)
telle qu 'el le est pr6cis~e ci-avant .
- - Cette condi t ion ne comporte aucune res t r ic t ion d 'opt imal i t~ (par rappor t au erit6re de d6tection)
pour les syst~mes h bande ~troite (radar, sonar actif,
t615communications hertziennes).
- - Elle impose une restr ict ion d 'opt imal i t6 ff bande
large (sonar passif) pour ce qui eoncerne la ddtection, mais permet cependant une estimation opt imale des
s ignaux en les pr~sentant non alt~rSs darts le m in imum
de brui t compat ible avec cet te <, non al t6rat ion ~).
- - Elle ne compromet pas l ' apagnage des antennes
10/11 A. T~Lf~C., 28, n ~s 5-6, 1973
254 H. MERMOZ. -- ]~CUEILS ET DIVERSIT]~ DES T R A I T E M E N T S ADAPTA, TIFS D ' A N T E N N E S
a d a p t a t i v e s qui est de pouvoi r dliminer s imut tan~ment N - - 1 broui l leurs mobi les ind~pendauts , ~ bande large eommc h bande 6troite.
- - L ' i n v e r s i o n d ' une mat r i ee de correlat ion, qui est inscri te dans les dquations de base du f i l t rage op t ima l h N entrdes, peu t , en fait , ~tre 6vit6e pa r des opera t ions pr~alables plus simples, qui sont des transformations lindaires des bru i t s or ig inaux amends ainsi h des formes plus (, maniab les ,>.
- - C e s t r ans fo rma t ions sont ldgit imes du po in t de vue de l ' op t imal i sa t ion . Elles sont de plus a da p t a - t i r e s daus la mesure oh est respect~e la condi t ion de (, r~f~rence b ru i t seul )>.
Manuscri t recu le 17 ddcembre 1972.
BIBL1OGRAPHIE
[l] MEaMOZ (H.). Antennes de ddtection optimales et adaptatives. Collection Technique et Scientifique du CNET (1971). Ed. Jacques et Demontrond, Fr. 52 p. Ce recueil rdunit quatre articles sur le m~me sujet, paru de 1963 h 1970 darts les Annales des Tdldcommu- nications. I1 est accompagnd de tr~s nombreuses
rdf~rences bibliographiques. Sont citdes ci-apr~s celles qui il est fait directement rSfdrence dans le texte
et darts l 'ordre de ces r~f~rences. [2] ARqUES (P. Y.). Etude de syst~mes de ddtection de
signaux par trai tement quadratique gdndralisd Th~se de Doctorat ~s Sciences, Universitd de Grenoble ( l i juillet 1966), 218 p.
[3] BIF.~VENU (G.). Contribution h l'dcoute passive, t rai tement spatial adaptat i f h large bande. ThOse de Docteur-ing~nieur. Universit~ d'Orsay (avril 1973), 96 p.
[4J G I R h U D O N (C.). Traitement optimal d'antenne. 5~e Col- loque Gt tETSI sur le Traitement du Signal et ses applications, Nice, mai 1973, publi~ par secretariat du Colloque GRETSI, bolte postale 93, 06802 - Cagnes- sur-Mer, 21 p.
[5] MEaMOZ (H.). Extension de la mdthode du filtrage adapt~ au cas de plusieurs entrdes pour l 'optimalisa- tion de la ddtection des signaux faibles. Fil trage adaptd et directivit~. ThOse de Doctorat ~s Sciences Grenoble (2 juillet 1964), 197 p. I1 convient dgalement d 'a jouter :
[6] MACCHI (C.). Simplifcat ion du filtrage optimum d'antenne. 4 e Colloque GTtETSI sur le Traitement du signal et ses applications, Nice, mai 1973, publid par secrdtariat sur Colloque GRETSI, bolte postale 93, 06802- Cagnes-sur-Mer, 30 p.
[7] AaquEs (P. Y.). D~tection, estimation et perfor- mances de signaux certains de date d'arrivde et de direction inconnues. Ann. Tdldcom., Ft. (sept.-oct. 19?l), 26, nos 9-10, pp. 371-380.
A. T~L~C., 28, n ~ 5-6, 1973 11/11





























