Embed Size (px)
Citation preview

TTHHÈÈSSEE
En vue de l'obtention du
DDOOCCTTOORRAATT DDEE LL’’UUNNIIVVEERRSSIITTÉÉ DDEE TTOOUULLOOUUSSEE
Délivré par l'INSA de Toulouse
Discipline ou spécialité : Systèmes Automatiques
Présentée et soutenue par Mme Fatima El Guezar Le 17 Décembre 2009
Titre : Modélisation et Simulation des Systèmes Dynamiques Hybrides Affines par
Morceaux. Exemples en Électronique de Puissance.
JURY Pascal Acco, Maitre de Conférences, INSA-Toulouse, France.
Karim Afdel, Professeur d’Université, Faculté des Sciences, Agadir, Maroc. Hassane Bouzahir, Professeur Habilité (HDR), ENSA, Agadir, Maroc.
Safwan El Assad, Maitre de Conférences HDR, Polythec’Nantes, France. Rapporteur Malika El Kyal, Professeur Habilité (HDR), ENSA, Agadir, Maroc.
Danièle Fournier-Prunaret, Professeur, INSA-Toulouse, France. Directrice de thèse Hicham Jamouli, Professeur Habilité (HDR), ENSA, Agadir, Maroc. Rapporteur
Ina Taralova, Maitre de Conférences, ECN, Nantes, France
Ecole doctorale : Ecole doctorale Systèmes (EdSys) Unité de recherche : Laboratoire Toulousain de Technologie et Ingénierie des Systèmes
Directeur(s) de Thèse : D. Fournier-Prunaret, P. Acco & Hassane Bouzahir Rapporteurs : Mohamed El Ansari, Safwan El Assad et Hicham Jamouli

N° d'ordre : 1019
THÈSE
Présentée en vue de l'obtent ion du titre
DOCTEUR
de l'Université de Toulouse délivré par l'Institut Nati onal des SciencesAppliquées de Toulouse
Spécialité: Systèmes Automatiqueset
de l'Universit é Ibn Zohr délivré par la Faculté des Sciences d 'AgadirSpécialit é : Systèmes Informatiques
par
Mme Fatima EL GUEZAR
LABORATOIRE TO ULOUSAIN DE TECH NOLOGIES ET D'INGÉ NIERIE DESSYSTÈMES (Toulouse- France)
Eco le Doctorale Systèmes
LABORATOIRE DES SYSTÈMES INFORMATIQUES ET VISION(Agadir-Maroc)
Titre de la thèse :
MODÉLISATION ET SIMULATION DES SY ST È M ES
DYNAMIQUES HYBRIDES AFFINES PAR MORCEAUX.EXEMPLES EN ÉLECTRONIQUE DE PUISSANCE.
Soutenue le 17 Décembre 2009 devant le jury :
Président :Rapporteurs :
Examinateurs :
Mme Malika E L KYALM. Safwan E L ASSADM. Hicham JA MO ULIM. Pascal AccoM. Karim AFDELM. Hassane BOUZAHIRMme Danièle FOURNIER-PRUNARETM?" Ina TARALOVA
Professeur Habilité, ENSA , Agadir, MarocMaître de Conférences HDR, Polythec'Nantes, FranceProfesseur Habilité, ENSA , Agadir, MarocMaître de conférence, INSA de Toulouse, Fran ceProfesseur, Faculté des Sciences d 'Agadir, MarocProfesseur Habilité, ENSA d'Agadir, MarocProfesseur, INSA de Toulouse, Fran ceMaître de Conférences, ECN , Nantes , France .


Remerciements
Les t ravaux présentés ont été initiés au Laboratoire Toulou sain de Technologies et d 'Ingénierie des Systèmes (LATTIS) de l'In sti tut National desSciences Appl iquées de Toulouse en Fra nce et poursuivis en cot utelle ent rece dernier et le Laboratoire des Systèmes Informatiques et Vision (LabSIV)de l'Université Ibn Zohr à la Faculté des Sciences d'Agadi r au Maroc avecla collaboration de l'Equipe Signaux Systèmes et Informatique (ESSI) del'ENSA d'Agadir.
Au terme de cette thèse, j 'adresse mes sincères remerciements à tou tepersonne dont l'intervention a favorisé son abouti ssement .
Mes remerciements les plus sincères vont à mes directeurs de recherchepour leur disponibilité et leur soutien tout au long de mes années de thèse .Je tiens à leur exprimer ma profonde gratitude pour avoir pris le risque dem'accepter en thèse sur un sujet exot ique. Je salue surtout la rigueur , le sensdu détail et l'espri t de synt hèse de Mme Dan ièle Fournier-P runaret et M.Pascal Acco ainsi que les conseils avisés de M. Hassane Bouzahi r.
Mes remerciement vont aussi à M. Karim Afdel pour son aide et saparticipation au Jury.
J 'exprime ici ma profonde gratitude à Messieurs Mohamed El Ansari ,Safwan El Assad et Hicham Jamouli qui m'ont honoré en acceptant la t âchede rapporteur.
Ma reconnaissan ce va aussi à Mme Malika El kyal pour la présidence duJury.
Je suis t rès sensible à l'honneur que me fait Mme Ina Taralova enexaminant cette ét ude.
Je t iens à remercier le Ministère de l'Enseignement Supérieur Maro cainà t ravers le CNRST-Maro c d'avoir financé partiellement mes activités derecherche par une bourse d'excellence. Ce qui m'a permis de finir ma thèsedans de bonnes condit ions. Par la même occasion , je remercie aussi tous lesresponsa bles et évalu ateurs de ce programme de bourses.

Il
.Jc remercie aussi le Laboratoire LATTIS pour le financement partielde missions au Maroc, Tunisie et Grande I3retagne et les responsables duprojet Maroc-Espagne A/6827/06 "Modélisation et commande hybride dessystèmes d'électronique de puissance" surtout :.vI. Abdelali El Aroudi pour lefinancement d'une mission benefique à Univcrsiti Rovira i Virgili, Tarragona.
Pour finir, mes remerciements les plus profonds vont à ma famille. Merci à
mes parents, à ma belle mère, à mon marie et à mes enfants: Abdurrahrnane,Ayah et mon après thèse né (Abdellah, 08/01/2010), pour leur patience etleur soutien.

Références personnelles
Articles parus dans des Journaux Internationaux :
• F. EL GUEZAR & H. BOUZAHIR : A Scenario for Generating ChaoticSignaIs from A Piecewise Linear System. ALHOSN University Journalof Engineering and Applied Sciences, (ISSN 2076-8516), Vol. 2, N. 2-3,December (2009).
• F. EL GUEZAR & H. BOUZAHIR : Chaotic Behavior in a SwitchedDynamical System. Modeling and Simulation in Engineering , Volume2008, Article ID 798395, 6 pages (2008).
• F. EL GUEZAR, H. BOUZAHIR, P. ACCO, D. FOURNIERPRUNARET & K. AFDEL : Scénario de Génération d 'un SignalChaotique à partir d'un Système Hybr ide Affine par Morceaux. e-TI- la revue électronique des technologies d'information, N. 4, (2007),http :/ /www.revue-eti .net /document .php ?id= 1290. ISBN 1114-8802.
Articles téléchargéables de la Librairie digitale de l'IEEE :
• H. BOUZAHIR, F. EL GUEZAR, A. EL AROUDI & T . UETA : Partial Time Delayed Feedback Control of Chaos in a Hybrid Model of aDC-DC Converter , Proceedings of the IEEE Internat ional Symposiumon Communication, Control and Signal Processing, St . Julians, Malta,March 12-14, pp . 158-161, 2008.
• F. EL GUEZAR, H. BOUZAHIR , P. ACCO, K. AFDEL & D.FOURNIER-PRUNARET : Modeling and Simulation in Scicos : A CaseStudy, Third IEEE International Symposium on Comp utational Intelligence and Intelligent Informatics, (ISCIII 2007), 28-30 March, AgadirMorocco, pp . 105-110, 2007. IEEE Catalog Number : 07EX1756 andISBN : 1-4244-1157-2.
Articles communiqués et publiés dans des proceeding de congrès :
• F. EL GUEZAR, P. ACCO , H. BOUZAHIR & D. FOURNIERPRUNARET : Accurate and Fast Event Detection Occurrence in PlanarPiecewise Affine Hybrid Systems , Proceedings of the Internat ional Symposium NOLTA (NOn Linear T heory and its App lications), Sept ember7-10, Budapest-Hungary, pp . 341-344, 2008.
• F. EL GUEZAR, H. BOUZAHIR , P. ACCO & T . UETA : Chaos in aSwitched Dynamical System : Scicos as a Modeler and Simulator, Proceedings of the International Symposium NOLTA (NOn Linear Theoryand its Applications), September 16-19, Vancouver-Canada, pp. 164167, 2007.

IV
• H. B(}CZAHIR, F. EL G"CEZAR & T. "CETA : On Sciees Simulationof a Hybrid Dynarnical System, 15th IEEE International Workshop onNonlinear Dynarnics of Electronic Systems (NDES 2(07), July 23-26,Tokushima-Japan, pp. 62-65, 2007.
• F. EL G"CEZAR, P. ACCO, P. CHARGE, D. FO"cRNIER-PRU.\"ARET& K. AFDEL : Gônôration du Chaos à Partir d'un Système DynamiqueHybride Affine par Morceaux, EDSys 2007, 8èm e congrès des doctorants,Ecole des mines d'Albi-Carmaux Toulouse-France, mai 10, (6 pages),2007.
• F. EL GUEZAR, H. BO"CZAHIR & P. ACCO : A Scenario for Generating Chaotic SignaIs from Piecewise Linear Systems, Information andCommunication Technologies International Symposium (ICTIS 20(7),3-5 Avril, Fes-Morocco, Article ID 44 SSD07-PES-2008, pp. 203-26, 2007.IEEE Morocco Section, ISB.\" : 9954-8577-0-2.
• F. EL GUEZAR, H. BO"CZAHIR & P. ACCO : On the Chaotic SignalGeneration from a Piecewise Linear Dynarnical System Fourth MultiConference on Systems, Signals & Devices (SSD 2(07), 19-22 March2007, Hammamct-Tunisia, (4 pages), 2007. ISBN 978-9973-959-06-5.
• F. EL GUEZAR, H. BOUZAHIR & P. ACCO : Chaotic Signal Generation from a Switched Dynamical System, 4th International Conference :Sciences of Electronic, Technologies of Information and Telecornrnunications (SETIT 2007), 25-27 :.YIarch 2007, Hammamct-Tunisia, pp. 115,2007. Book ISB.\" : 978-9973-61-474-2 and CD ISBN: 978-9973-61-475-9.
• F. EL GUEZAR, H. BOUZAHIR, P. ACCO & D. FOURSIERPR"CNARET : Occurrence of Chaos in the Dynamics of the BoostConvertcr : Sciees as an Altcrnatc Open Source Modeler and Simulator. Accepté au Congrès Systèmes Electroniques Informatiques et Traitement de l'Information (SEI&TI 2007), 25-26 Janvier, Faculté desSciences et Techniques de Mohammadia-Maroc, pp. 178-183, 2007.
• F. EL G"CEZAR, H. BOUZAHIR, P. ACCO, D. FOURSIERPR"CNARET & K. AFDEL : Scénario de Gônôration d'un Signal Chaotique à partir d'un Système Hybride Affine par Morceaux, Actes de9t h :.YIaghrebian Conference on Information Technologies Former :.YIaghrebian Conference on Software Engineering and Artificial Intelligence(:.YICSEAI'06, Agadir-Morocco : 7-9 Decernber}, pp. 199-204, 2006.
• F. EL GUEZAR, H. BOUZAHIR, P. ACCO & D. FOUR.\"IERPR"CNARET : Poster on Modeling and Simulation by Sciees : On Chaotic Signal Generation from a Simple Hybrid System, CD proceeding ofthe Workshop on Transmission of Chaotic Signals, University of Bristol,1'1 - 3rd August, Bristol-Ulv, 2006.

v
• F. EL GUEZAIl, H. BOUZAHIIl, P. ACCO & D. FOUIl.\"IEIlPRCNARET : Scicos : An Alternate Open Source Modeler and Sirnu
lator of Switched Dynarnical System, Actes du Colloque International
Sur l'Informatique et ses Applications, (IA'2006, Oujda-Morocco : 31
Octobre, 1 et 2 Xovcmbrc), pp. 119-122, 2006.
• F. EL GL;EZAIl, H. BOUZAHIIl, P. ACCO, D. FOUIl.\"IEIlPRL;NARET & K. AFDEL : Génération du Chaos à Partir d'un Sys
tème Hybride Modélisant le Convertisseur Boost en Boucle Ouverte,Actes des Premières Journées de Tclécommunications d'Electronique et
Electrotechnique (PJTEE'06, Oujda-Maroc : 25 et 26 :.vIai) , pp. 59-62,
2006.
Communications dans des congrès avec évaluation des articles etproceedings de leurs Résumés :
• H. BOUZAHIIl, F. EL GL;EZAIl, P. ACCO & T. L;ETA : Chaos andIts Control in Some Switched Dynarnical Systems, Proceeding of the "
Premier Congrès de la Société Marocaine de Mathématiques Appliquées
" Fcbruary 06-08, Rabat-Morocco, (1 page), 2008.
• F. EL GL;EZAIl, H. BOL;ZAHIIl & P. ACCO : Chaotic Bchavior in aHybrid System that arises in Electronics. 6ème Conférence Internatio
nale AIMS "Systèmes Dynamiques, Equations Différentielles et Appli
cations", 25-28 Juin, Université de Poitiers, France, 2006.
• F. EL GUEZAIl, H. BOL;ZAHIIl & P. ACCO : Hybrid Systems :Examples and Simulation. World Conference on DifferentiaI Equa
tions and Applications. University Cadi Ayyad, 15-20 June, .vlarrakesh
Morocco, 2006.
Autres participations sans communication:
• International Workshop on Nonlinear Maps and their Applications (NO:.vIA'(7) I.\"SA, Toulouse, France, December 13-14, 2007.
• 1ères Journées Scientifiques en Technologie de l'Information et de la Com
munication, (JOSTIC'07), organisées par l'Association des Chercheurs
en Technologies de l'InFormation "ACTIF", le "IEEE Student Branch"
de I'Lniversité Mohammed V Agdal, l'UFR ACSYS et le Laboratoire
LI:.vIIARF de la faculté des sciences Rabat, Maroc, 24 Février, 2007.


Table des matières
Introduction Générale 10.1 Etude et découverte du chaos 10.2 Contributions de ce travail . 20.3 Organisation de ce mémoire 3
1 État de l'art 51.1 Introduction . . . . . . . . . . . . . . . . . . . 71.2 Notions de base sur les systèmes dynamiques . 7
1.2.1 Systèmes dynamiques cont inus . 71.2.2 Systèmes dynamiques discrets 71.2.3 Singularités . . . . . . 81.2.4 Nature des singularités 81.2.5 Attracteur chaot ique 101.2.6 Bassin d'attraction . . 101.2.7 Bifurcation 101.2.8 Différents types de bifurcations 111.2.9 Bifurcation collision de frontière 121.2.10 Diagramme de bifurcation . . . 13
1.3 Stratégies classiques de mod élisation des convertisseurs à com-mutations . . . . . . . . . . . . . . . . . . . . . . . . . 131.3.1 Présentation générale . . . . . . . . . . . . . . . 131.3.2 Analyse du fonctionnement du convertisseur Boost
contrôlé en mode courant . . . . . . . . 141.3.3 Analyse du fonctionnement du convert isseur Buck
contrôlé en mode tension . . . . . . . . . . . 151.3.4 L'approche de fonction discrétisée en temps . . 161.3.5 L'approche de moyennisation 171.3.6 Procédure général e de dérivation des fonctions it ératives
discrétisées en temps pour les convertisseurs de base à
commutations . . . . . . . . . . . . . . . . . . . . . . . 181.3.7 Fonctions itératives approchées des convertisseurs Boost
et Buck 221.3.8 Remarques sur les modèles classiques des convertisseurs
à commutation . . . . . 231.4 Systèmes dynamiques hybrides . . . . . . . . 24
1.4.1 Définitions . . . . . . . . . . . . . . . 241.4.2 Différents types de modèles hybrides 24

VIU Table des matières
1.4.3 Définition du modèle hybride de Pcttcrsson . . . . . .. 25
1.4.4 Systèmes hybrides affines considérés . . . . . . . . . .. 26
1.5 Simulation des systèmes dynamiques hybrides et problématique 27
2 Modélisation hybride des convertisseurs de puissance à commutations 312.1 Introduction............................ 32
2.2 Fonctionnement hybride des convertisseurs de puissance à com-
mutations . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 33
2.3 Modèle hybride des convertisseurs de l'èlcctroniquc de puis-
sance en cas du mode de conduction continue 33
2.4 :Ylodôlisation.................... 342.5 Convertisseur Boost contrôlé en mode courant . 34
2.5.1 Résultats de simulation et commentaires 35
2.6 Convertisseur Buck contrôlé en mode tension. . 42
2.6.1 Résultats de simulation et commentaires 42
2.7 Conclusion . . . . . . . . . . . . . . . . . . . . . 48
3 Simulation précise des systèmes hybrides planaires affines parmorceaux 513.1 Introduction................. 52
3.2 Frontière fixe 53
3.2.1 Système dynamique hybride étudié 53
3.2.2 Simulation des systèmes hybrides affines par morceauxet detection d'ôvônements . . . . . . . . . . . . . . 54
3.2.3 Algorithme qui detecte l'occurrence des évènements 54
3.2.4 Etude des cas . . . . . . 57
3.2.5 Architecture du solveur. . . . . . . . . . . . . . . . 64
3.2.6 Exemple d'application . . . . . . . . . . . . . . . . 64
3.2.7 Exemple du convertisseur Boost entre deux limites 65
3.2.8 Exemple du convertisseur Boost contrôlé en mode courant 68
3.3 Frontière mobile. . . . . . . . . . . . . . . . . . . . . . . . .. 77
3.3.1 Processus général . . . . . . . . . . . . . . . . . . . .. 77
3.3.2 Exemple du convertisseur Buck contrôlé en mode tension 78
3.4 Conclusion............................. 83
Conclusion Générale et Perspectives 85
A Annexe des algorithmes 87A.1 Cas de deux valeurs propres réelles non nulles . . . . . . . .. 88
A.2 Cas d'une seule valeur propre réelle non nulle (l'autre est nulle) 89

Table des matières
A.3 Cas de deux valeurs propres réelles egales .A.4 Cas de deux valeurs propres nulles. . .A.5 Cas de deux valeurs propres complexes
Bibliographie
IX
909192
93


Liste des tableaux
1.1 Différences qualitatives entre les bifurcations régulières et labifurcation collision de frontière . . . . . . . . . . . . . . . . . 12
1.2 Tableau des expressions approchées des fij et gi pour les conver-tisseurs Boost et Buck. . . . . . . . . . . . . . . . . . 23
3.1 Expressions de f(t) selon les valeurs propres Pl et P2 . 563.2 Expressions de f'(t) suivant Pl et P2 . . . . . . . . . . 563.3 Expressions de f(t) dans le cas d 'une frontière oblique, selon
les valeurs propres Pl et P2. . . . . . . . . . . . . . . . . . . .. 773.4 Expressions de f'(t) dans le cas d 'une frontière oblique, suivant
Pl et P2 78


Table des figures
1.1 Convert isseur Boost contrôlé en mode courant . . . . . 141.2 Convert isseur Buck cont rôlé en mode tension. . .. . 151.3 Signal de cont rôle Vcon (t), signal rampe en dents de scie
Vramp(t), signal de commande Q(t) et ét ats du commutateurs. 16
1.4 Convert isseur Boost en mode de conduction cont inue. (a) Circuit de base ; (b) Topologie du circuit quand S est fermé ; (c)Topologie du circuit quand S est ouvert. . . . . . . . . . . .. 19
1.5 Convert isseur Buck en mode de conduct ion cont inue. (a) Cir-cuit de base ; (b) Topologie du circuit quand S est fermé ; (c)Topologie du circuit quand S est ouvert. . . . . . . . . . . .. 20
1.6 (a) Mod èle concept uel d 'un système hybride générique ; (b)Troi s sit uations pour lesqu elles des simulate urs classiqu eséchouent à détecter ou localiser proprement des événements . . 28
2.1 Diagramme d 'état du modèle hybride des convert isseur s Boostet Buck. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2 Modèle hybride du convert isseur Boost donné au simulateurnumérique Scicos. . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3 Diagramme de bifurcation du Boos t dans le plan (Ire! , i L) pourI re! E [0.5, 1.6] et Vin = 10V fixé. . . . . . . . . . . . . . . . . 36
2.4 Régime périodique fond amental pour Ir e! = 0.7A : (a) formed 'onde temporelle du courant ii. . (b) plan de phase (vc , i L).(On a évité de visualiser le régime transitoire en prenant lacondit ion initiale appartenan t au cycle). 38
2.5 Cycle d 'ordre 2 pour Ir e! = lA : (a) forme d 'onde te mporelledu courant it. , (b) plan de phase (vc , id . . . . . . . . . . . .. 39
2.6 Cycle d 'ordre 4 pour I re! = 1.3A : (a) forme d 'onde temporelledu courant it. , (b) plan de phase (vc , iL ) . . . . . . . . . . . .. 40
2.7 Régime chaotique pour Ir e! = 1.5A : (a) forme d 'onde tempo-relle du courant it. , (b) plan de phase (vc , iL ) . . . . . . . . .. 41
2.8 Modèle hyb ride du convert isseur Buck donné au simulateur nu-mérique Scicos. . . . . . . . . . . . . . . . . . . . . . . . . .. 43
2.9 Diagramme de bifurcation du convertisseur Buck dans le plan(Vin, vc) pour Vin E [30, 47] et ~e! = 11.3V fixé. 43
2.10 Régime périodique fond amental pour Vin = 30V : (a) formed 'onde temporelle de la te nsion uc , (b) plan de phase (vc , id. 45

XIV Table des figures
2.11 Cycle d'ordre 2 pour Vin = 37.5V : (a) forme d'onde temporelle
de la tension Ue, (b) plan de phase (ue, iL)' 46
2.12 Cycle d'ordre 4 pour Vin = 41V : (a) forme d' onde temporelle
de la tension Ue, (b) plan de phase (ue, iL)' 47
2.13 Régime chaotique pour Vin = 46.5V :(a) forme d'onde tempo-
relle de la tension Ue, (b) plan de phase (ue, iL)' . . . . . . .. 48
3.1 Transitions dépendant de l'Nat et de l'orientation. . 53
3.2 Recherche d'une racine t* > 0 d'une fonction parabolique. . 58
3.3 Recherche d'une racine t* > 0 d'une fonction admettant unpoint d'inflexion tnn. . . . . . . . . . . . . . . . . . . . . . .. 59
3.4 Diagramme de transition de l'exemple d'application. . . . . .. 66
3.5 Simulation de Scicos versus notre simulation scmi-analytiquc. 66
3.6 Boost entre deux limites de courant l r e f l = lA et l re f '2 = 0.5A :
(a) (haut) forme d'onde temporelle de la tension /Je, (bas) forme
d'onde temporelle du courant il,; (b) plan (Ue, id· 67
3.7 Diagramme de balayage du I300st dans le plan (IrcI' Vin) pourl rcI E [0.5, 1.6]A et Vin E [5,20]V. . . . . . . . . . . . . . .. 69
3.8 Diagramme de bifurcation du I300st dans le plan (Ircl , il,) pour
l rcI E [0.5, 1.6]A et Vin = 10V fixé. . . . . . . . . . . . . . .. 70
3.9 Diagramme de bifurcation du I300st dans l'espace (IrcI' il" /Je)pour ln'f E [0.5, 1.6]A et Vin = 10V fixe. . . . . . . . . . . .. 71
3.10 Zoom de la figure 3.8 : Collision frontière (border collision) en
ln'f = 1.23A. 71
3.11 Rôgime périodique fondamental pour l r e f = 0.7A : (a) (haut)
forme d'onde temporelle de la tension /Je, (bas) forme d'onde
temporelle du courant il,; (b) plan de phase (/Je, iL)' ..... 73
3.12 Cycle d'ordre 2 pour l rcI = lA: (a) (haut) forme d'onde tempo-
relle de la tension /Je, (bas) forme d'onde temporelle du courant
it.: (b) plan de phase (/Je, irJ . . . . . . . . . . . . . . . . .. 74
3.13 Cycle d'ordre 4 pour l rcI = 1.3A : (a) (haut) forme d'onde
temporelle de la tension /Je, (bas) forme d'onde temporelle du
courant it.: (b) plan de phase (/Je, i t.). 75
3.14 Rôgime chaotique pour l r e f = 1.5A :(a) (haut) forme d'onde
temporelle de la tension /Je, (bas) forme d'onde temporelle du
courant sL; (b) plan de phase (/Je , iL)' 76
3.15 Régime périodique fondamental pour Vin = 30V : (a) (haut)forme d'onde temporelle de la tension uc, (bas) forme d'onde
temporelle du courant t t.: (b) plan de phase (/Je, i t.). ..... 80

Table des figures xv
3.16 Cycle d'ordre 2 pour Vin = 37.5V : (a) (haut) forme d'ondetemporelle de la tension Ve, (bas) forme d'onde temporelle ducourant sL; (b) plan de phase (ve , iL)' 81
3.17 Cycle d'ordre 4 pour Vin = 41V : (a) (haut) forme d'onde temporelle de la tension Ve, (bas) forme d'onde temporelle du cou-rant i r, ; (b) plan de phase (ve, i rJ 82


Introduction Générale
0.1 Etude et découverte du chaos
L'étude des systèmes dynamiques a débuté dans les mi-années 1600 [Str94],quand Newton a inventé les équations différentielles, a découvert les lois dumouvement et la gravitation universelle et les a associés pour expliquer leslois de Kepler du mouvement planétaire. Vers la fin des années 1800, Poincaré
a développe une nouvelle approche geometrique pour analyser les problèmes
dynamiques. Cette approche a permis un développement des études de la dynamique, avec des applications qui dépassent le cadre de la mécanique céleste.
L'invention des ordinateurs dans les années 1950 a été un tournant dansl'histoire des systèmes dynamiques. L'ordinateur permet des calculs rapides etdes simulations numériques des equations cc qui ôtait impossible avant. Cela acntrainé par la suite un developpement important des systèmes non linéaires
et cela a conduit à la découverte par Lorenz en 1963 de la dynamique chaotique avec un attracteur! étrange [Lor63]. Il a ainsi mis en évidence l'extrêmesensibilité aux perturbations d'un simple modèle de calcul de la convectionatmosphèriquc.
Le travail de Lorenz n'a eu que peu d'impact sur les systèmes non linéaires
jusqu'aux années 1970, quand les recherches sur le chaos ont véritablement ex
plosé. En 1971, Ruelle et Takens ont proposé une nouvelle théorie concernantl'initialisation de la turbulence dans les fluides, basée sur la considération d'attracteurs étranges [Rue71]. En 1975, dans leur article [Li75], Li et York ontpour la première fois de l'histoire utilisé le terme" chaos". Un an après, Maya trouvé des exemples de chaos dans les applications itératives modélisant des
interactions de populations en biologie et il a écrit un article important décrivant comment un simple système non linéaire peut avoir un comportementcomplexe et chaotique [:.vlay76]. Ensuite, le physicien Feigenbaum a découvertqu'il y a des lois universelles qui gouvernent la transition d'un comportementrégulier vers un comportement chaotique lFei801. Ses travaux ont permis d'ôta
blir une relation entre ce qui est appelé "cascade de doublements de période"
et le chaos et cela a conduit les physiciens à s'intéresser à l'étude des systèmesdynamiques.
Parallèlement au chaos, une autre notion a été développée dans le domainedes systèmes dynamiques dans les années 1970. Mandclbrot s'est intéresse aux
1 C'est un ensemble invariant de l'espace d'états d'un système dynamique, qui est atteint
asymptotiquement quand t ---+ -l-oc ou t ---+ -oc.

2 Introduction Générale
fractales, il a produit des magnifiques graphiques sur ordinateur de ces frac
tales et il a montré comment cette notion peut être utilisée dans différents
domaines [Man82]. En particulier, en biologie mathématique, Winfree a ap
pliqué des méthodes géométriques permettant de caractériser des fractales
aux oscillations biologiques, entre autres les rythmes circadiens et les rythmes
cardiaques I\Vin801.
Les effets chaotiques dans les circuits électroniques ont ôtô constatés pour
la première fois par Van der Pol en 19271vdP271. En 1983, Chua et Matsurnoto
ont synthétisé le premier circuit électronique, autonome et chaotique, l'oscilla
teur double spirale, maintenant connu sous la dénomination "circuit de CIma"
IChu92J, qui est actuellement etudie comme un circuit électronique chaotique
modèle IChu941. Dans les decennies passees, beaucoup de chercheurs ont travaille sur les systèmes dynamiques, avec des contributions trop nombreuses
pour les lister toutes.
0.2 Contributions de ce travail
Ln système dynamique hybride est un système contenant à la fois des
variables d'état continues et des variables événementielles en interaction. On
trouve des systèmes hybrides dans des domaines très variés, on peut citer dessystèmes robotiques, des equipements chimiques contrôlés par des vannes et
des pompes, des cellules biologiques (croissance et division) et des circuitsélectroniques non linéaires.
En raison de l'interaction entre les aspects continus et discrets, le compor
tement des systèmes hybrides peut sembler extrêmement complexe. Cepen
dant ce comportement devient relativement simple dans des systèmes hybrides
affines par morceaux qui peuvent néanmoins faire apparaître des bifurcations
et du chaos. Il y a plusieurs exemples tels que les convertisseurs DC-DC dèlcc
tronique de puissance.
Les principaux convertisseurs DC-DC d'ôlectronique de puissance sont le
I3uck (abaisseur de tension) et le I300st (survolteur). Ce sont des systèmes à
commutation dont la structure change avec le temps [eA05].
Les convertisseurs DC-DC sont largement utilisés dans différentes applica
tions industrielles, domestiques ou aérospatiales. Ces circuits sont typiquement
contrôlés par la modulation de largeur d'impulsions P\VM (Picco \Vise Mo
dulation) ou autres techniques semblables pour régler la tension ou le courant
fourni aux charges. Le contrôleur décide qu'on passe d'une configuration à
une autre en faisant en sorte que les transitions se produisent cycliquement
ou en temps discret. La plupart des traitements mathématiques, dans le but
de rendre l'analyse possible, utilisent des techniques qui sont soit basées sur la

0.3. Organisation de ce mémoire 3
moyennisation soit sur la discrétisation. La moyennisation peut mener à des
conclusions fausses sur le fonctionnement du système. Les modèles discrets ne
donnent aucune information sur les états du système entre les instants d'échan
tillonnage, de plus ils sont très difficiles à obtenir. En fait, dans la plupart des
cas, une etude analytique pure est incnvisagcablc. 1; ne approche possible pour
analyser ces convertisseurs peut se faire via des modèles de systèmes dyna
miques hybrides. Les convertisseurs DC-DC sont particulièrement de bons
candidats pour ce type d'analyse étant donné leur structure naturellement
hybride. La nature des commutations de ces systèmes les rend fortement nonlinéaires. Ils peuvent présenter des phènomèncs spécifiques complexes comme
des structures fractales de bifurcations ou du chaos.
L'étude de la dynamique non linéaire des convertisseurs DC-DC a débuté
en 1984 par les travaux de I3rockett et Wood [I3ro84]. Depuis, le chaos et
les phénomènes non linéaires dans les circuits d'électronique de puissance ont
attiré l'attention de différents groupes de recherche dans le monde entier. Différcnts phènomèncs non linéaires ont ôtô observés, comme les routes vers le
chaos à partir de la cascade de doublements de période [Ham88], [Dea90],
[Tse94a], [Tse94b] et [Yua98] ou des phénomènes de quasi-périodicité [eAOOb],[eAOOa] et [eAOl], ainsi que des bifurcations de type "border collision" (colli
sion frontière) IYua981 et IBanOOI.
La simulation des circuits d'ôlectronique de puissance et des systèmes hy
brides affines par morceaux en general, se base sur des simulateurs purement
numériques. Même si ces simulateurs peuvent atteindre une précision relative
suffisante pour une trajectoire continue, ils peuvent omettre certaines condi
tions de commutations et par suite diverger radicalement de la trajectoire
réelle du système. Un de nos objectifs est de fournir un outil de simulationprécis et rapide, qui sert notamment à étudier les systèmes hybrides affines
par morceaux en prenant en compte les événements d'états de type frontière
fixe ou mobile et des événements temporels de type périodiques. L'outil de si
mulation que nous proposons permet une meilleure détection de l'occurrence
des evenements dans les systèmes hybrides affines par morceaux, car notre
approche repose en partie sur les expressions analytiques du modèle hybride
étudié.
0.3 Organisation de ce mémoire
Les travaux de cette thèse sont présentés en trois chapitres:
Le chapitre 1 regroupe les définitions des concepts utilisés tout au long de
ce manuscrit. Ces définitions ont été regroupées en quatre grandes parties:dans la première partie nous donnons des définitions relatives aux systèmes

4 Introduction Générale
dynamiques décrits par des récurrences. Xous abordons ainsi des notions spéci
fiques aux systèmes non linéaires. Nous développons plus particulièrement des
concepts liés à la dynamique chaotique et à la bifurcation. La deuxième partie
de ce chapitre présente les deux techniques classiques de base de l'analyse des
convertisseurs DC-DC d'électronique de puissance, à savoir la moyennisation
et la discrétisation, ainsi que leurs avantages et inconvénients. La troisième
partie introduit les systèmes hybrides affines par morceaux et présente la dé
finition des systèmes hybrides adoptée par Petersson et utilisée dans cette
thèse. La dernière partie propose un tour d'horizon général sur la simulation
numérique des systèmes dynamiques hybrides, l'intérêt de leur simulation et
les approches numériques données dans la littérature. Enfin, le travail per
sonnel apporté à ce mémoire est expliqué dans les derniers paragraphes de ce
chapitre.
Le chapitre 2 donne le modèle hybride général des convertisseurs DC-DC
d'électronique de puissance en citant deux exemples de convertisseurs : le
Boost et le Buck. Les résultats de simulations obtenus par l'outil numérique
toolbox scicos sont donnés.
Le chapitre 3 présente notre outil de simulation des systèmes hybrides
planaires affines par morceaux d'ordre 2, pour les deux types de frontières fixe
et mobile.1; ne conclusion générale et les perspectives de ce travail sont données dans
le dernier chapitre.
Enfin, le lecteur trouvera en annexe les algorithmes des différents cas de
simulations du chapitre 3.

CHAPITRE 1~
Etat de l'art
SommaireIntroduction .
Notions de base sur les systèmes dynamiques
1.2.1 Systèmes dynamiques continus
1.2.2 Systèmes dynamiques discrets
1.2.3 Singularités .
1.2.4 ~ature des singularités
1.2.0 Attracteur chaotique
1.2.6 Bassin d'attraction
1.2.7 I3ifurcation ....
1.2.8 Différents types de bifurcations
1.2.9 Bifurcation collision de frontière.
1.2.10 Diagramme de bifurcation ....
Stratégies classiques de modélisation des convertis-seurs à commutations . . .. . . . . . .
1.1
1.2
1.3
1.3.1
1.3.2
Présentation générale .
Analyse du fonctionnement ducontrôlé en mode courant
convertisseur I300st
7
7
7
7
8
8
10
10
10
11
12
13
13
13
14
1.3.3
1.3.4
1.3.5
1.3.6
Analyse du fonctionnement du convertisseur Buck
contrôlé en mode tension. .. .
L'approche de fonction discrétisée en temps
L'approche de moyennisation .
Procédure générale de dérivation des fonctions itéra
tives discrétisées en temps pour les convertisseurs de
base à commutations. . . . . . . . .
1.3.7 Fonctions itératives approchées des convertisseurs
Boost et Buck. . . .
15
16
17
18
22
1.3.8 Remarques sur les modèles classiques des convertisseurs
à commutation . . . . . . . . . . . . . . . . . . 23
1.4 Systèmes dynamiques hybrides .. . . . . . . . 24
1.4.1 Définitions 24
1.4.2 Différents types de modèles hybrides 24

6 Chapitre 1. État de l'art
1.4.3 Définition du modèle hybride de Pcttcrsson . . . . .. 25
1.4.4 Systèmes hybrides affines considérés 26
1.5 Simulation des systèmes dynamiques hybrides et pro-blématique 27

1.1. Introduction
1.1 Introduction
7
Dans cette thèse nous étudions les convertisseurs DC-DC à commutation
qui exhibent un comportement chaotique. Le présent chapitre rappelle les
principales définitions relatives aux systèmes dynamiques discrets et continus,
en particulier, celles concernant la notion de chaos ou d'attracteur chaotique.
Les notions de bifurcation et le diagramme de bifurcation sont également
traités dans ce chapitre.
Ce chapitre cite notamment deux approches classiques de modélisation des
convertisseurs DC-DC, leurs avantages et leurs inconvenients.Ce chapitre introduit egalement une classe de systèmes dynamiques hybrides,
la classe des systèmes hybrides affines par morceaux. Les systèmes de ce type
apparaissent dans beaucoup d'applications comme, par exemple, les systèmeslinéaires avec entrées saturées, les robots sautillants et les approximations des
systèmes non lineaires, etc. On définit les systèmes dynamiques hybrides et la
classe des systèmes hybrides affines par morceaux etudies.
La simulation numérique est un outil important pour le design et l'analyse
des systèmes hybrides. On rappelle les techniques et les approches numériquesadoptees pour la simulation numerique des systèmes hybrides en général et
les systèmes hybrides affines par morceaux en particulier. Enfin, on donne laproblématique générale de cette thèse.
1.2 Notions de base sur les systèmes dyna-.
nuques
1.2.1 Systèmes dynamiques continus
Ln système dynamique continu est gcnéralcmcnt decrit par un système
d'équations différentielles du type:
dX ( )dt = F X, A, t (1.1 )
où X E iRN est l'état du système, A E iRP est un vecteur de paramètres, Festune fonction non linéaire de l'état.
Lorsque dans cette relation, le temps t n'apparaît pas explicitement, le système
est dit autonome.
1.2.2 Systèmes dynamiques discrets
Les systèmes dynamiques discrets sont généralement décrits par la relationsuivante appelée récurrence ou equation aux récurrences ou encore transfor-

8
mation ponctuelle de dimension N :
Chapitre 1. État de l'art
(1.2)
où X E ~N est le vecteur d'Nat et A E ~p est un vecteur paramètre. X n + 1 est
appelé image ou conséquent de rang 1 de X n par F et X n est un antécédent
de Xn+l.X(n = 0) = X o est appelé condition initiale.
Les systèmes décrits par (1.2) sont dits non autonomes lorsque n figure expli
citement dans l'expression de X n+l • Les systèmes decrits par l'équation :
X n+1 = F(Xn , An) (1.3)
sont dits autonomes. Dans le souci d'alléger la notation, la récurrence sera
notée Xn+l = T(Xn).Si chaque point X n possède un antécédent unique X n - I , alors la récurrence
F est dite inversible sinon elle est non inversible. La dynamique des systèmes
décrits par des récurrences non inversibles est plus complexe que celle des
systèmes décrits par des récurrences inversibles.
1.2.3 Singularités
On distingue deux types de singularités de dimension 0 les points fixeset les cycles, encore appelés orbites périodiques.
point fixeLn point fixe X* est un point de l'espace d'état vérifiant:
X* = T(X*)- Cycle d'ordre k
C'est la gcnéralisation d'un point fixe lorsqu'on considère la récurrence
obtenue après k applications de T notée T(k). Les k points Xt ,i =1, ... ,k avec k > 1, appartenant à un cycle d'ordre k vérifient les deux
relations:
x; T(k) (X;)
X; =1= T(s) (X;) si 0 < 8 < k
avecT(k) = ToTo· .. oT
"--v---'k fois
1.2.4 Nature des singularités
(1.4)
(1.5)
Pour caractériser la nature de ces singularités on introduit la notion de
multiplicateur :

1.2. Notions de base sur les systèmes dynamiques 9
- a) Lorsque la dimension de la récurrence est N = 1, le multiplicateur
d'un point fixe x* est À = T'(X*) avec T' = ~~ et le multiplicateur
d'un cycle d'ordre k (Xr, X~, ... ,X;:J est À = TI~=l T'(Xt). Un pointfixe ou un cycle est dit attractif si 1 À 1 < 1 et répulsif si 1 À 1 > 1.
- b) Lorsque la dimension de la récurrence est N > 1, les multiplica
teurs d'un point fixe X* ou d'un cycle d'ordre k (X~, X~, ... ,X~)sont les valeurs propres de la matrice jacobienne de T(X*) ou deT (k) (X*) . - 1 /..i , Z - , ••• , rc .
Pour une récurrence bi-dimensionnelle (N = 2)
(Xn+] , ~!+]) = T(Xn , ~!) (1.6)
(1.7)
On associe à un point fixe ou à un cycle, deux multiplicateurs À i (i = 1,2) quisont les valeurs propres de la linéarisation de T(k), i = 1, ... , k définie par:
[
aXn+k axn+k]J- aXn ~• - DYn +k DYn +k
D x; DYn
Selon les valeurs de À] et À2 , on peut définir plusieurs types de cycles(respectivement de points fixes). Ces types caractérisent la dynamique dusystème au voisinage des points de cycle (respectivement du point fixe).
Si À1 et À2 sont complexes conjugués, le cycle est dit de type foyer. Il
est stable si IÀ]I < 1 et IÀ21 < 1 et il est instable si IÀ]I > 1 ou IÀ21 > 1.- Si À] et À2 sont réels et si 1 À] 1 < 1 et 1 À2 1 < 1 le cycle est de type noeud
stable.Si À1 et À2 sont réels et si 1 À1 1 > 1 et 1 À2 1 > 1 le cycle est de type noeudinstable.
- Si À] et À2 sont réels et si 1 À] 1 < 1 et 1 À2 1 > 1 le cycle est de type col.Pour une récurrence définie dans ]RN :
(1.8)
Ln cycle d'ordre k génère par cette récurrence possède ::\ multiplicateurs,valeurs propres de la matrice Jacobienne de T(k) en un point du cycle. Lamatrice Jacobienne de T(k) est définie par:
r
D Xl
D~t .....1= : '.
DXNn+kaxA ...
D Xl 1------!l.±.&.Dx~v
DXNn+k
ax;:
(1.9)
Le cycle est stable si tous ses multiplicateurs sont dans le cercle unité. Il estinstable si un de ses multiplicateurs au moins ne se trouve pas dans le cercleunité.

10 Chapitre 1. État de l'art
1.2.5 Attracteur chaotique
Les définitions suivantes sont extraites de [Mirûôb], On appelle un ensembleinvariant D une zone de l'espace d'ôtat vérifiant :
F(D) = D
Ln ensemble invariant fermé D est dit attractif si :
• • T { F(U) c U:..J un voisinage Ù tel que . T. (: ) ( .) n---++oo
V:L'E ù,FT!:L' --+ D
(1.10)
(1.11)
Ln ensemble attractif est appelé un attracteur lorsqu'il est topologiquement
transitif, c'est-à-dire que pour deux sous-ensembles non vides quelconques Uet V de D :
:..Jk > 0 tel queF(k)(U) n V =1- 0 (1.12)
1;n attracteur est dit chaotique lorsque les points le constituant génèrent destrajectoires sensibles aux conditions initiales. Un attracteur chaotique est généralement associé à l'existence d'une infinité de trajectoires instables de tousordres. Un attracteur chaotique génère un comportement chaotique stable alorsqu'un répulseu: chaotique génère un transitoire chaotique.
1.2.6 Bassin d'attraction
On définit le bassin d'attraction (ou simplement le bassin) d'un ensembleattractif A (c'est-à-dire un trajectoire stable ou un attracteur chaotique)comme l'ensemble ouvert de tous les points X E ]RN tels que:
(1.13)
Le bassin d'attraction peut être simplement connexe, rnultiplcmcnt connexe,
non connexe ou à frontières floues [:.vIir96a] [:.vIir96c].
1.2.7 Bifurcation
La bifurcation signifie un changement qualitatif de la dynamique du systèrnc, qui résulte du changement d'un des paramètres 1\ du système. Par
exemple déstabilisation d'un équilibro stable, apparition ou disparition d'un
cycle ou d'un attracteur, ...La valeur pour laquelle la bifurcation se produit est nommée le point de bi
furcation.

1.2. Notions de base sur les systèmes dynamiques
1.2.8 Différents types de bifurcations
Il
Dans cette section, on considère trois types de bifurcations locales: la bifurcation de doublement de période, la bifurcation de :.'\eimark et la bifurcationpoint selle (ou col) noeud. Ces bifurcations sont locales car elles peuvent êtreanalysées par la linéarisation du système au voisinage d'un point d'équilibreou d'un cycle limite. Tous les types de bifurcations étudiées correspondent
toujours à IÀi 1 = 1.
1.2.8.1 Bifurcations flip ou doublement de période (À = -1)
Cette bifurcation a lieu lorsqu'une des deux valeurs propres est égales à
-1. Un cycle d'ordre k qui subie cette bifurcation va changer de nature etcrée un cycle d'ordre 2k de la même nature. C'est-à-dire, un point fixe stabled'ordre 1, par exemple, devient instable en même temps que l'apparition d'uncycle d'ordre 2 stable.Cette situation peut être représenté par:
Cycle attractif d'ordre k H cycle répulsif d'ordre k+ cycle attractif d'ordre 2k
(1.14)
1.2.8.2 Bifurcation fold ou noeud-col (À = +1)
La bifurcation À = +1 correspond à la situation où l'une des deux valeurspropres est égale à +1. Ce type de bifurcation donne naissance à deux cyclesd'ordre k en même temps, l'un est attractif et l'autre est instable.Cette situation peut être représentée par:
o H cycle attractif + cycle répulsif
où 0 signifie absence de cycle.
1.2.8.3 Bifurcation de Neimark (p = 1)
(1.15)
Cette bifurcation se produit lorsque la matrice Jacobienne possèdo deuxvaleurs propres complexes conj uguécs À 1 = '\2 et de plus 1À i= 1,21 = 1.Elle se traduit par:
Foyer attractif d'ordre k H foyer répulsif d'ordre k+ une courbe invariante attractive
(1.16)

12 Chapitre 1. État de l'art
1.2.9 Bifurcation collision de frontière
Ce type de bifurcation se produit dans le cas des systèmes dynamiques hy
brides affines par morceaux. Quand un paramètre du système traverse la fron
tière de deux sous-systèmes de différentes structures cela produit un brusque
changement au niveau du comportement du système [Tse03].
Il vaut la peine d'être noté qu'à l'exception de la collision de frontière, les
types de bifurcations decrites avant n'entraînent pas un changement structurel dans le système. Ces bifurcations sont nommées bifurcations régulières ou
bifurcations standards. Mathérnatiquernent., la signification du terme "régu
lier" est liée à la différentiabilité de la fonction qui décrit le système. Le terme
"non regulier" convient bien à l'introduction du diagramme de bifurcation
qui permet d'observer des transitions non usuelles qui ne ressemblent pas aux
bifurcations de type standard. En outre, une bifurcation régulière est asso
ciée normalement au changement de stabilité d'une solution et à l'apparition
d'une autre, tandis que la bifurcation collision de frontière est caractérisée
par une brusque modification du fonctionnement principal. Autrement dit,une bifurcation régulière se produit à une frontière de stabilité, alors que la
bifurcation collision de frontière se produit à une frontière de fonctionnement
où le système subit un changement structurel. Le tableau 1.1 qui suit résume
les différences de base entre ces deux classes de bifurcations.
Caractéristiques Bifurcations régu- Bifurcation collisionlières (doublement de de frontièrepériode, Hopf, etc.)
Cause Perte de stabilité Alteration de fonctionne-
ment du circuit
Structure du sys- Pas de changement de Changement de structure
tème structure (pas de chan- (modification de séquence
gement de séquence d'un d'un point de vue topolo-
point de vue topologique) giquc)
Manifestation Apparition dans le dia- Transition brusque qui ne
dans le dia- gramme de bifurcation ressemble à aucune des
gramme de des bifurcations de type bifurcations de type stan-
bifurcation standard dard (courbure brusque,discontinui té. sauts. etc.), ,
TAB. 1.1 - Différences qualitatives entre les bifurcations régulières et la bifur
cation collision de frontière

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 13
1.2.10 Diagramme de bifurcation
L'introduction de l'espace d'état et les mesures dans les domaines tempo
rels et fréquentiels sont utiles pour caractériser les comportements des états
d'équilibres, mais il existe également de nombreux autres outils d'étude des
dynamiques non linéaires, en particulier concernant les bifurcations.
Le diagramme de bifurcation est un tracé des points de l'Nat stationnaire
du système en fonction du paramètre du contrôle. Typiquement, on choisit
un état variable et on trace la valeur limite de celui-ci en fonction d'un seul
paramètre de contrôle. Pour les systèmes discontinus, on trace simplement les
valeurs successives d'un Nat variable. Pour les systèmes continus, un certain
type de discrétisation est demandée, en général à l'aide d'une section de Poin
caré. Un diagramme de bifurcation résume l'information sur l'espace d'état et
la variation en fonction du paramètre peut être visualisée. La transition d'un
état stationnaire vers le chaos peut être observée.
Parmi les circuits qui exhibent un comportement chaotique on trouve les
circuits d'électronique de puissance.
1.3 Stratégies classiques de modélisation des
convertisseurs à commutations
1.3.1 Présentation générale
Les convertisseurs à commutations sont essentiellement des circuits affines
par morceaux à commutations ITse031. En termes simples, le fonctionnementd'un convertisseur à commutations peut être décrit comme une répétitionordonnée d'une suite fixée de topologies d'un circuit. La fonction de conversion
du convertisseur est déterminée à partir des topologies les constituant et del'ordre dans lequel elles sont répétées. Ce basculement entre les topologies est
réalisé par des commutations adéquates de topologies.
Pour atteindre une fonction de conversion du convertisseur, la stratégie
usuelle de contrôle consiste en la variation des temps relatifs que durent les
topologies le constituant. Ces temps ne sont pas usuellement linéairement
reliés à l'objectif final du contrôle. Ainsi, le fonctionnement global dépend
du temps et il est non linéaire. Sans des modèles appropriés, l'analyse de ces
circuits à commutations peut apparaître difficile.
La modélisation classique de ces convertisseurs à commutations a été élaborée
autour de deux approches de base, à savoir, l'approche de fonction discrétisée
en temps et l'approche de moyennisation.
Xot.ons qu'il est bien connu que les topologies existantes des circuits

14 Chapitre 1. État de l'art
+Vin - S
D
R c
Horloge QllR+->T
R Q
S Q'
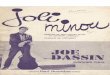
FIG. 1.1 - Convertisseur Boost contrôlé en mode courant.
de convertisseurs à commutations peuvent être dérivées de combinaisonsdes convertisseurs Boos t et /ou Buck et d 'un transformateur idéal tension/courant [Sev85]. Une démonstration rigoureuse de ce point de vue a étéfournie par Liu et Lee [Liu88].
Ainsi , les convert isseurs Boost et Buck sont d 'une importance fondamentale et leurs propriétés ont naturellement un rapport avec tout système complexe de convertisseur qui en dérive .
1.3.2 Analyse du fonctionnement du convertisseur Boostcontrôlé en m ode courant
Le convertisseur Boost cont rôlé en mode courant en boucle ouverte estconsti t ué de deux parti es : le convertisseur et l'unité de cont rôle (voir figure1.1).Le convertisseur est un circuit d 'ordre deux, qui comprend une induct ance ,une capacité, une diode, un commutate ur et une résistance mise en parallèleavec la capacité.Le fonctionnement général du convertisseur est commandé par l'unité decontrôle. Elle compare le courant d 'induct ance ii. avec le courant de référence Ire! et génère le signal de commande on /off par une bascule RS pour lacommande de l'ouverture et de la fermeture du commutate ur S . On considèrele commutateur S ferm é au débu t d 'un cycle, c'est à dir e à t = nT. Le courantd 'inductance i L augmente tant que S est fermé jusqu 'à ce que le courant i L

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 15
cRD
Q 1!;.amp !VV1vcon a Vrej
++
S LZL
FIG . 1.2 - Convertisseur Buck contrôlé en mode ten sion .
at teigne Irej ; à ce moment là le commutateur S s'ouvre et reste à cet étatjusqu 'au début d'un autre cycle.
1.3.3 Analyse du fonctionnement du convertisseur Buckcontrôlé en mode tension
Le convertisseur Buck est un circuit d 'élect ronique de puissance qui convert it une tension DC en une tension DC inférieure. Ce convertisseur cont rôlé enmode ten sion est constitué de deux parties : le convertisseur et l'unité decontrôle (voir figure 1.2). Le convertisseur est un circuit d 'ordre deux , quicomprend une inductance, une capacité, une diode, un commutateur et unerésistance mise en parallèle avec la capacité.Le fonctionnement général du convertisseur est commandé par l'unité decontrôle. Dans ce circuit, le commutateur S est contrôlé par le comparateurqui compare le signal de contrôle vcon (t) avec le signal ra mpe Vramp(t). Eneffet, le commutateur S est ouvert lorsque vcon (t ) > 1!;.amp(t) et il est fermédan s l'autre cas. Le signal de cont rôle vcon (t ) est une combinaison linéaire dusigna l de sortie aux bornes de la capacité vc (t ) et la tension de référence 1!;.ej :
(1.17)
où a est le gain de la chaîne du retour et le signal rampe 1!;.amp(t) est donnépar :
(1.18)
La figure 1.3 représente la forme d 'onde du signal de cont rôle vcon (t), du signalrampe en dents de scie 1!;.amp(t) du signal de commande Q(t) ainsi que les états

16
Vu
8.0
7.5
7.0
6.5
6.0
5.5
5.0
4.5
VL4.0
Vramp(t )
Chapitre 1. État de l'art
11 1
1 1
1 1
1 1 Q(t)1 1
1 1
1 1
1 11 1
o
0.0000 O.OOO? 0.0004 0.0006 0.0008 0.0010 tes)11
So n T So ff Son Son
F IG. 1.3 - Signal de contrôle vcon (t ), signal rampe en dents de scie ~amp (t) ,
signal de commande Q(t) et états du commutateur S .
du commut ateur S .
1.3.4 L'approche de fonction discrétisée en temps
Une approche de modélisation qui donne une information complète sur ladynamique est l' approche de fonction ité ra ti ve discrétisée en te mps. Si on souhaite modéliser la dynam ique d 'une mani ère discrét isée, on prend la valeur duvecteur d 'ét at X n , en commencement d 'une période , on poursuit sa trajectoireau long des N ét apes, et on trouve sa valeur à la fin de la période. Le but finalest de produire une équa ti on de différence de la form e :

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 17
où :I:n est le vecteur d'état à t = nT, Vin est la tension d'entrée, d est le vecteur
des rapports cycliques, i. e., d = [dl d2 ... dN ]. Pour compléter le modèle, uneequation de contrôle similaire est exigée. Il vaut la peine d'être note que la
description ci-dessus suppose que la période d'ôchantillonnage est égale à la
pèriodo de commutation. Ainsi, le modèle obtenu est capable de dècrirc la
variation de la dynamique jusqu'à la fréquence de commutation.
1.3.5 L'approche de moyennisation
Il s'agit probablement de l'approche classique de modélisation la plus large
ment adoptée. Elle a été développée par R. Middlebrook dans les années 1970
[:.vIid76] pour modéliser les convertisseurs à commutations. Cette approche de
modélisation enlève effectivement la dépendance explicite en temps du modèle
initial èvoluant en fonction du temps. Le but final est de produire une cqua
tion d'ôtat en temps continu qui ne contient aucune dépendance explicite en
temps.
L'idée clef dans cette approche se base sur le fait qu'on se débarrasse des dé
tails de commutations des variables d'ôtat et on ne laisse que leurs dynamiques
moyennes. Essentiellement, un modèle moyonnisé se focalise sur l'enveloppe
de la dynamique du mouvement et, pour cette raison, il est plus adapté à la
caractérisation des convertisseurs à commutations dans le domaine des basses
fréquences. Notons qu'en ingénierie pratique, de tels modèles rnoyennisès sont
souvent linéarises pour donner des modèles linéaires invariants par rapport
au temps qui peuvent être analysés dans le domaine fréquentiel standard,
facilitant la conception de boucles de contrôle et l'évaluation des réponses
transitoires d'une façons familière aux ingénieurs. Toutefois, si l'objectif est
l'étude du comportement non linéaire, la linéarisation ne s'effectue pas mais
c'est plutôt l'analyse directe du modèle moyonnisé tel qu'il est qui est noces-
saire.Le modèle moyennisè s'effectue sur un cycle périodiquo de commutations par
faitement identifié. Dans le processus de modélisation, les équations d'état
qui correspondent aux étapes possibles sont d'abord écrites, et le modèle final est simplement la moyenne pondéréo de toutes les équaticns d'Nat. La
pondération est determinee à partir des durées relatives de chaque etape. Ty
piquement, un modèle moyennisè a la forme suivante:
N N
~~ = (L diAi):c + (L diBi)Vini=l i=l
(1.19)
où .7: est le vecteur d'Nat, N est le nombre dètapcs dans une période, di est
la période fractionnaire (ou rapport cyclique) de la i ôm c etape, Ai et Bi sont

18 Chapitre 1. État de l'art
les matrices du système à laièrn e étape. Finalement, on doit définir la loi du
contrôle pour compléter le modèle. Cela est souvent donné comme un ensemble
dèquations qui définissent implicitement ou explicitement les quantités d j . Laforme générale de ce genre d'ensemble d'ôquations est
G 1( dl, d'l, , Vin, :r) = 0G'2(dl, d'l, , Vin, :r) = 0
(1.20)
A noter que les equations ci-dessus définissent généralement les rapports cy
cliques dj comme des fonctions non linéaires des états et des paramètres du
système. Ainsi, le modèle rnoyennisè est non linéaire malgré son apparencelinéaire. Clairement, le modèle moyennisè comme il est derive néglige tous les
détails liés aux hautes fréquences et donc il n'est pas adapté à la caractérisa
tion des hautes fréquences et des dynamiques à échelle rapide. Comme regle,
on doit seulement utiliser un modèle rnoyennisè pour l'analyse et la caracté
risation des phénomènes qui arrivent lentement avec un ordre de magnitude
sous la fréquence de commutation.
1.3.6 Procédure générale de dérivation des fonctions itératives discrétisées en temps pour les convertisseurs de base à commutations
Dans cette section, on décrit une procédure formelle pour dériver l'équation
d'état matricielle discrétisée en temps, qui est valable pour tout convertisseur à
commutations indcpondarnrnont des topologies exactes du circuit et des suites
de topologies. Lorsque le convertisseur à commutations fonctionne en mode
de conduction continue, à ce point, on peut simplement regarder le mode
de conduction continue comme une condition spécifique de fonctionnement
pendant lequel le courant traversant l'inductance est toujours différent dezéro, sa séquence de topologies consiste en deux circuits linéaires définis par
les équaticns d'ôtat suivantes:
.T
z
AI.T + Ble(t) pour t; < t < t; + dT
A 2 ::c + B 2e(t ) pour t-. + dT <::: t < tn +1
(1.21)
(1.22)
où z est le vecteur d'état [UCiLjT, e(t) est la tension d'entrée (qui, en géné
ral, varie en fonction du temps), d est le rapport cyclique, T est la période de
commutation, les Ai et Bi représentent les matrices du système et t; dénote
nT. Les figures (1.4) et (1.5) montrent, respectivement, la séquence des topo
logies des convertisseurs Boost et Buck fonctionnant en mode de conduction

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 19
Vin -
L
L
D
(a)
R
L
(b)
(c)
R
R
F IG. 1.4 - Convertisseur Boost en mode de conduct ion cont inue. (a) Circuitde base ; (b) Topologie du circ uit quand S est fermé ; (c) Topologie du circuitquand S est ouvert .

20
Vin -
s
D
L
(a)
L
Chapitre 1. État de l'art
R
L
(b)
R
(c)
R
F IG . 1.5 - Convertisseur Buck en mode de conduction cont inue. (a) Circuitde base ; (b) Topologie du circuit quand S est fermé ; (c) Topologie du circuitquand S est ouvert .

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 21
continue. Pour simplicité, on fixe la valeur de la résistance équivalente en série
à zéros TC = onLes matrices Ai et Bi du convertisseur Boost, sont données par:
[-l, •• [ 0 ]A - ne e B-
f12 - -1 0 ' 2 - lI, I,
Pour le convertisseur Buck, les matrices Ai et Bi, sont comme suit:
A = [~c\ .• B = [ 0 ]1 .=..lOlOI,
La valeur de :r: à la borne supérieure du premier sous intervalle est d'abordecrite en fonction de celle à la borne inférieure du sous intervalle. La formestandard de cette expression est : .::r(tn + dT) = iD 1 (dT ):I:(tn ) + iD 1 (tn + dT - r)B1e(r).c1T(1.23)
t n
iD I (dT).T(tn ) + r'l' iD I (E,)Blc(tn + dT - E,).dE, (1.24)./0
où iD 1 est la matrice de transition correspondante. De façon similaire, pour lesecond sous intervalle, on obtient l'expression suivante:
:r(tn +1 ) = iD 2 (tn +1 - (tn + dT)):I:(tn + dT)
t:+ iD 2 (tn+l - r)B2e(r).drtn+dT
-i-er= iD 2 (tn + T - t; + dT):r:(trJ + f iD 2 (Ç) B2e(tn+1 - Ç).dE,
./0·d'l'
= iD 2 (dT ):r: (trJ + f iD 2 (E, )B2c(tn +1 - E,).dE,./0
(1.25)
où,
d=l-d

22 Chapitre 1. État de l'art
L'incrémentation totale de z acquise sur une période de commutation est alors
obtenue en su bstituant l'expression précédente de :1; (tn + dT) dans l'expres
sion précédontc de .T(tn+1). De plus, en supposant que la tension d'entrée e(t)est une fonction qui varie très lentement (dans le sens que e(t) reste presque
constante sur une pèriodo de commutation), le processus de substitutions suc
cessives ci-dessus donne l'équation itérative générale discrétisée en temps pour
les convertisseurs de base à commutations fonctionnant en mode de conduc
tion continue :
où,
:[n z (tn ) ,
<I>2 (dT) <I> 1(dT),·dï' -dï'
<I>2(cIT) j <I>1(ç)B1.dE, +! <I>2(ç)B2.dE,o . 0
(1.26)
(1.27)
(1.28)
(1.29)
Il est à noter que, d'un point de vue systèmes, d est l'entrée du système et
l'équation ne possède pas de terme linéaire en tl. Lne application directe des
méthodes linéaires est alors impossible.
1.3.7 Fonctions itératives approchées des convertisseursBoost et Buck
Dans cette section, on résume les expressions approximatives obtenuespour les différentes matrices et fonctions qui définissent les fonctions itéra
tives des convertisseurs Boost et Buck. L'utilisation de ces fonctions itératives
permet l'analyse du comportement non linéaire des convertisseurs à commu
tations. L'application de l'approximation de degré deux aux convertisseurs
à commutations fonctionnant en mode de conduction continue mène à une
equation d'ôtat approchée de forme similaire à (1.26), à savoir,
.Tn+1 = F(d).Tn + G(d)e(nT)
où e(nT) est la valeur de la tension d'entree au temps t = tn ,
[fll (d) f12 (d) ] [ 091 (d) ]
F (d) = f2l (d) .1'22 (d) et G (d) = 092 (d) .
(1.30)
Le tableau (1.2) résume les expressions approchées des fij et o9i pour les convertisseurs I300st et I3uck. Pour des raisons de simplifications des notations, C
et L ont Nô utilisés pour noter les constantes en temps CRet L / R respec
tivement. L'approximation R + TC ~ R a egalement ôtô appliquée à ces
expressions.

1.3. Stratégies classiques de modélisation des convertisseurs àcommutations 23
Convertisseur Boost'1' '1,2 (1-d)2'1'21 - - + -, - -'--;;-....L..-_
TC 2T(; 2TeTLn(l-d)T (l-d?T 2 Tc(I-d)2T2
TC 2T 2, 2TeTI,-(I-d)T (l-dE)T2 Tc(I-d?T2
RTl, 2RTeTL 2R2T~
1(l-d)2T2 TZ;(I-d?T2
- 2 + 2 2TCTI, 2R TI,(l-d2)T2
2TeTI,'1' Te(1-d2)'1'2
nTL 2n2T?
Convertisseur Buck
TAB. 1.2 - Tableau des expressions approchées des fij et gi pour les conver
tisseurs Boost et Buck.
1.3.7.1 Modèles moyennisés pour les convertisseurs Boost et Buck
Clairement, la dérivation de Am et Dm est tout ce qui est nécessaire pour
trouver le modèle moyennisé pour n'importe quel convertisseur à commuta
tions. L'algèbre utilisée est simple. Pour le cas des convertisseurs simples à
commutations fonctionnant en mode de conduction continue, le modèle prend
la forme suivante:
.7; = Am (d):r + E m(d) ~n pour tout t(1.31)
où d est le rapport cyclique. Pour le convertisseur I3oost, Am et Dm sont
données, respectivement, par:
[
-1
4 - C(R+Tc)" m - -n(l-d)
L(R+Te)
n(l-d)C(R+Te)
-nTc(I-d)L(R+Tc)
(1.32)
et pour le convertisseur Buck, elles sont données par:
[
-1
A = C(n+rc)fim -n
L(R+rc)
C(n~T(.'.') ] ct B = [ _Ct) ] .-Rre" mL(R+rc)
(1.33)
Les valeurs des rapport cycliques d sont ensuite déterminés en fonction de
la commande et du cycle périodiquo de moyennisation. Ceci dépend du type
de commande définissant les relations implicites (1.20)
1.3.8 Remarques sur les modèles classiques des convertisseurs à commutation
La moyennisation peut mener à des conclusions fausses sur le fonctionnement du système. En effet, la moyennisation ne donne qu'un modèle linéaire

24 Chapitre 1. État de l'art
autour d'un point de fonctionnement convenable. Et puisque le but est l'ana
lyse non linéaire, la linéarisation n'est pas utilisée au début de l'analyse, si
non cela cntrainc la suppression de tous les termes non linéaires. L'étape demodélisation la plus importante avant la linéarisation est la dérivation d'unmodèle non linéaire adéquat. D'une manière générale, le modèle moyennisè est
bon pour une caractérisation à échelle lente (basses fréquences). Les modèles
discrets ne donnent aucune information sur les états du système entre les ins
tants d'ôchantillonnage, de plus ils sont très difficiles à obtenir par rapport à la
première approche. En fait, dans la plupart des cas, ils ne sont pas mathérna
tiqucmcnt traitables. Une approche possible pour analyser ces convertisseurs
est reste donc l'étude du système en tant que système dynamique hybride.
1.4 Systèmes dynamiques hybrides
1.4.1 Définitions
L'expression hybride signifie, en général, hétérogène en nature ou en com
position. La notion du terme système hybride a été développée pour indiquer
des systèmes avec un comportement défini par des entités ou des processusde caractéristiques distinctes. Les systèmes hybrides, étudiés ici, sont des sys
tèrncs dynamiques où le comportement est determine par l'interaction de deux
types de variables: les variables à valeurs continues et les variables à valeurs
discrètes. Ces systèmes contiennent typiquement des variables ou des signaux
qui prennent des valeurs d'un ensemble continu (par exemple, l'ensemble des
nombres reels) et egalement des variables qui prennent des valeurs d'un en
semble discret qui est, en general un ensemble fini (par exemple, l'ensemble
de symboles {a, b, c}).
Les systèmes dynamiques hybrides couvrent plusieurs domaines d'applica
tions tels que les procédés Batch, les systèmes électrotechniques, les réseauxde communication, les systèmes de transport, la commande des procédés in
dustriels, les systèmes flexibles de production, l'industrie agro-alimcntaire, la
commande des moteurs, les systèmes biologiques et la robotique, ...
1.4.2 Différents types de modèles hybrides
Il existe une multitude de définitions de modèles hybrides dans la littéra
ture. Ces modèles sont plus ou moins généralistes et plus ou moins adaptés
à la simulation ou à l'analyse. Le modèle doit representer mathématiquement
le comportement et les interactions entre les parties continues et discrètes dusystème.

1.4. Systèmes dynamiques hybrides 25
Certains modèles sont basés sur une représentation d'un système continusupervisé par un réseau de Pétri dont les transitions sont infiuencées par l'état
continu IPel88J, IPel891 et IPel931.D'autres modèles utilisent des transformations interfaces pour établir une
relation entre le vecteur d'Nat réel et des événements. Ces événements animent
un automate dont l'Nat discret agit à son tour sur le système continu ISti921,
[Lem93] et [Ner93].Beaucoup de modèles définissent des ensembles de commutations dans l'es
pace de phase. 1;n événement est généré lorsque l'état continu pénètre dansune de ces régions de commutation. Le système discret stimulé par ces événements agit sur le système continu en le faisant commuter [Tav87], [vVit66],
IDog94J, IPet951 et ILen961·Avec ce genre de modèle, l'Nat discret peut aussi dependre d'ôvônements
extérieurs en entrée du système. Le modèle le plus généraliste est obtenu par
Branicky dans IBra95aJ, IBra941 et IBra95bl en ajoutant des sauts de valeursdans les variables d'état continues lors des commutations du système discret.
:.\"ous utilisons une représentation hybride simple, à base de systèmes continus commutés dans certaines régions. Ce type de modélisation est proposée
par Pettersson dans [Pet95] et [Pet99].
1.4.3 Définition du modèle hybride de Pettersson
La définition du modèle hybride, présentée ici, est assez générale etconvient à une analyse de stabilité. La caractéristique essentielle d'un systèrnc hybride est de contenir à la fois un vecteur d'ôtat continu X(t) à valeurs
réelles, et un vecteur d'état discret E(t) dont les valeurs appartiennent à unensemble discret fini M.Le terme système hybride vient de la coexistence de ces deux types de variables. Le système continu est modélisé par une èquation différentielle ordi
naire, ayant la particularitè de dependre du vecteur d'Nat discret E(t).Le système discret est un système événementiel dont les événements provoquant un changement d'état discret sont issus soit d'une entrée discrète, soitd'un événement lié à l'état du système continu.Dans cette etude ces derniers evenements sont liés à la traversée par le vecteurd'ôtat de surfaces du plan de phase dites surfaces de commutations.
I3ien qu'un système hybride puisse être aussi bien à temps continu qu'à tempsdiscret, nous limitons la définition suivante aux systèmes à temps continu.
Définition 1.1 Un système hybTide Ji = (~n X M, ~p x Z=, F, cjJ) est défini
par:- un ensemble non-vide appelé l'espace d'états hybTide H = ~n X M;

26 Chapitre 1. État de l'art
un ensemble ]RP x L appelé l' espace des entrées externes de 1{ ;
des fonctions de transition F : DF --+ ]Rn et cP : D,p --+ M vérifiant
et
X(t) = F (X(t), E(t), u(t))E+(t) = cP (X(t), E(t), CT(t))
(1.34)
D Ji ç ]Rn X M X ]RP
D r/J ç ]Rn X M X ]RP XL,
O'IL E+(t) désigne l'état E(t) immédiatement après l'instant t.
(1.35)
La composante X, qui est à valeurs réelles, du vecteur d'état du systèmehybride 1{ est appelée variable d'Nat continue. De même, la composante E, quiest à valeurs discrètes, du vecteur d'ôtat est appelée variable d'ôtat discrète.
De manière identique pour les entrées du système, on appelle chaque élémentII une entrée continue du système et chaque élément CT une entrée discrète.
La transition d'un état discret à un autre se produit lorsqu'un événementest détecte. Il y a deux types d'ôvônements : les evenements dctats et lesévénements temporels. Les événements dctats surviennent quand l'Nat X(.)atteint un ensemble de commutation Sb'ib'j qui représente l'hypersurface detransition de l'état discret E(t) = i à un autre E+(t) = .7; alors que lesévénements temporels sont des événements qui se réalisent quand des datesprcdèfinics sont atteintes.
1.4.4 Systèmes hybrides affines considérés
:.'\ous présentons dans cette section le sous-ensemble des systèmes hybridesaffines utilisé pour modéliser les circuits commutés.
Ln système hybride est dit affine par morceaux si la fonction F(.,.) estdéfinie pour chaque E EMet X E ]Rn par F(X(t), E(t)) = Ar;(t)X + Br;(t) ,
où Ar;(t) E ]Rn X ti et Br;(t) E ]Rn sont des matrices qui dépendent de l'état
discret E(t). Ainsi, un système hybride affine par morceaux est un systèmehybride qui est sous la forme:
X(t) = Ar;(t)X + Br;(t) ,
E(t) E M = {I, 2, ... ,N}(1.36)
Remarque 1.1 Le couple de fonctions (X, E) est dit solution du sys-tème hybride affine par morceaux (1.86) s'il satisfait (1.86), O'IL E(.) estune fonction constante par morceaux.
- Un temps t est dit temps de commutation d'une solution (X, E) de (1.86)si la fonction E est discontinue en t.

1.5. Simulation des systèmes dynamiques hybrides etproblématique 27
On dit qu'une trajectoire de (1.36) commute en un temps t si ce dernierest un temps de commutation.
- Si une solution (X, E) de (1.36) est définie sur [0, +CXJ [, les temps decommutations forment une suite {tn }.~=o de nombres réels positifs telleque
to = 0, t n +! > t-: TI = {O, 1, 2, ... } et lim t; = OC,n-----+x
qu'on appelle suite de commutations de la solution (X, E).
Les transitions d'état discret s'effectuent lors d'événements de trois sortes:
événements d'état ou frontière fixe: Dans l'espace d'état, les commuta
tions se produisent en des surfaces de commutations qui se composent
d'hyperplans de dimension TI - 1 :
(1.37)
avec N ij E ]R! x ri et lij E IR.
événements périodiques: D'une manière générale, pour les systèmes dy
namiques hybrides non autonomes, la fonction cP peut dépendre aussi
du temps Ç) (X, E, t) : ]Rn X M X ]R --+ M. Dans ce cas, des événe
ments temporels peuvent avoir lieu et valider une transition vers unautre Nat discret. Ces événements peuvent être, par exemple, des évcnc
mcnts périodiques. Ces derniers sont simplement définies par les instants
t = dPb'ib'j' où dPb'ib'j appartient à l'ensemble
P Ei Ej = {t E ]R : t = kT + cp, kEN} (1.38)
avec T la période et cp la phase de ces événements périodiques.
frontière mobile: Les commutations peuvent se réaliser aussi en des sur
faces obliques de commutations définies par:
SHiHj = {X(t) E ]Rn, =j t* E ]R: Nij.X:S ~ij.t + bij 'II t < t*} (1.39)
t * .: 'ifi i'T X (t*) - A t* b .' i'T TIll! X ti A TIll t b TIll. vell e nij' - L..:J.ij' + ij, ou "'ij E li"'. ,L..:J.ij E li"'. e ij E li"'..
1.5 Simulation des systèmes dynamiques hy
brides et problématique
L'objectif de l'automatisation est de garantir qu'un système réel répond à
un certain nombre de spécifications. Il est donc necessaire d'Nudier et d'ana
lyser le comportement du système et de sa commande. Plusieurs approches

28 Chapitre 1. État de l'art
g(X(t)) = 0
(a)
X(tk)
X( tk)
X(tk+d
X(tk+ l )
(b)
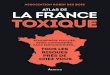
F IG. 1.6 - (a) Modèle concept uel d 'un système hybride générique; (b) Troissituation s pour lesquelles des simulateurs classiques échouent à détecter oulocaliser proprement des événements.
sont possibles suivant la difficulté du problème d 'analyse et le niveau de garantie souhaité pour le résultat. L'approche la plus générale consiste à ét udierle système par simulation numérique [Zayûl]. En effet, les difficultés d 'analyseet de synthèse des systèmes dynamiques hybrides font de leur simulation unoutil d 'étude privilégié.
En plus de la simulation, des techniques numériques d'approximation sontde plus en plus utili sées pour analyser de manière automatique cert ains typesde systèmes hybrides [Chu991, [Dan9S], [MitOO] . Il est connu que lorsqu e lasimulation des systèmes hybrides échoue dans la détection d'un événement,cela peut avoir des conséquences néfastes sur la connaissance de la solutionglobale. Plusieurs publications mettent l'accent sur la détection précise desévénements comme un des principaux verrous à lever dans la mise en place desimulateurs de systèmes hybrides [Mos99], [Kow971.
La figure 1.6(a) représente graphiquement le comportement du modèled'un système hybride générique. A un instant initial to , le mode ql est actifet le système continu suit l'équation différentielle X = I, (X) avec unecondit ion initiale Xo = X(to). Une fois la condition de commutation réalisée,la t ra nsit ion de l'état discret ql vers q2 est permise ; l'état peut êt re réinitialiséinstantanément et le systè me ent re en mod e q2 où il évolue suivant l'équationdifférentielle X = h(X) . Ainsi, un événement se produit quand une solut ion

1.5. Simulation des systèmes dynamiques hybrides etproblématique 29
X(t) d'un système hybride vérifie la condition g(X(t)) = 0 (g est appelée la
fonction garde, la condition de commutation est appelée condition garde).
Xotre problèmo est de detecter correctement les transitions discrètes. Plusformellement le problèmo est donné par:
t* = ma::CIE[lo,x] / g(X(t)) < 0, 'lit E [ta, t*] (1.40)
avec f : ]Rn ---+ ]Rn, X o = X(to) E ]Rn et 9 : ]Rn ---+ ]R telle que g(Xo) < 0,
ainsi que X = f(X)La plupart des solveurs classiques ODE utilisent une discrétisation uni
forme du temps pour évaluer les différentes valeurs de la solution X(t). Ces
simulateurs hybrides divisent la tache en une phase de detection d'ôvônement
poursuivie par une phase de localisation d'ôvônement. Ils procèdent de la
phase de détection en vérifiant si g(X(to)) 2: O. Si la condition est fausse, il
y a intégration numérique de l'équation différentielle en un seul pas du tempst l = to+h et vérification si g(X(t l ) ) 2: O. Cette procédure est répétée jusqu'à
un pas du temps pour lequel g(:r:(t k ) ) 2: 0 est vraie, pour ce point un ôvôncrncnt est supposé produit dans l'intervalle (tk - I , tk ] . Xot.ons que la valeur
du pas h est choisie sans considérer les dynamiques de garde. C'est ainsi que
la phase de localisation est activée pour déterminer le temps de l'occurrenceplus précisèmcnt, mais parfois on suppose simplement que l'événement est
survenue à tk . La phase de localisation est typiquement une variante entre les
algorithmes numériques classiques (bissection ou brackcting). Une fois qu'un
événement est localisé, l'intégration est arrêtée et les transitions sont autori
sées.
Il y a plusieurs cas où les solvcurs classiques ODE peuvent rater certainsévénements (figure 1.6 (b )) .
De nombreuses techniques ont été proposées pour résoudre le problème
de detection dèvéncmcnts. Dans ISha871, Shampine et al. ont proposé une
methode fiable pour tester si un événement s'est produit pendant l'intervalle
[t k , t k +1Loù tk et tk +1 sont deux instants successifs. Cette approche est basée
sur la construction d'une approximation polynomiale de la fonction de garde
sur l'intervalle d'étude et l'application d'un algorithme qui cherche le zéro de
ce polynôme. L'inconvénient majeur de cette technique, est qu'elle consomme
beaucoup de puissance de calcul.
Park et Barton IPar961 ont combiné l'idée de l'approximation polynomiale
avec des méthodes issues de l'arithmétique des intervalles pour déterminer
les intervalles durant lesquels X(t) peut sortir du domaine. Esposito et al.
IEspOlI ont utilisé des techniques de la théorie du contrôle pour calculer un
pas de temps adaptatif, ralentissant la simulation quand on se rapproche dela frontière du domaine.

30 Chapitre 1. État de l'art
Toutes ces techniques sont basées sur des schémas d'approximation nu
mérique des solutions des équations différentielles. Elles possèdent donc deuxinconvénients majeurs. D'abord, la précision de la détection est évidemment
limitée par celle du schema numerique utilisé. De plus, le pas de temps doit
rester suffisamment fin pour garder une précision acceptable, ce qui peut me
ner à un grand nombre d'itérations.
1;n outil de simulation qui permet une meilleure détection de l'occurrence
des evenements dans les systèmes hybrides affines par morceaux dont l'état
continue se trouve dans un polytope convexe fermé, est presente dans les références IGir021 et IGir041. Il est basé sur l'expression symbolique de la solution
X(t) et, par conséquent, ne possède pas les défauts décrits précédernrnent.
Signalons à ce propos qu'en électronique, certains circuits sont modélisés par
des systèmes hybrides affines par morceaux, les commutations se font sur des
frontières fixes, c'est le cas du Boost ou de la PLL (Phase Locked Loop : Boucle
à Verrouillage de Phase) ou encore du circuit dAlpazur. Les commutations
peuvent également se faire sur des frontières mobiles, c'est le cas du conver
tisseur Buck. Contrairement à ce qui est supposé dans la méthode de Girard,
l'ensemble de ces frontières est un ouvert et non pas un polytope convexefermé. Par conséquent, une telle approche ne peut pas être appliquée pour le
cas des circuits électroniques. Une nouvelle approche pour simuler ce type de
système hybride affine par morceaux est nécessaire. Notre objectif à travers
cette thèse, est de donner un outil de simulation précis et rapide qui sert pour
simuler ce type de systèmes et permet de donner les dates d'intersections avec
des frontières mobiles ou fixes ou egalement pour des evenements périodiques.

CHAPITRE 2
Modélisation hybride desconvertisseurs de puissance à
commutations
Sommaire2.1
2.2
2.3
2.4
2.5
Introduction
Fonctionnement hybride des convertisseurs de puissance à commutations . . . . . . . . . . . . . . . . . . .
Modèle hybride des convertisseurs de l'électroniquede puissance en cas du mode de conduction continue
Modélisation .
Convertisseur Boost contrôlé en mode courant .
32
33
33
34
34
2.5.1 Hcsultats de simulation ct commentaires . . . . . 35
2.6 Convertisseur Buck contrôlé en mode tension . 42
2.6.1 Hcsultats de simulation ct commentaires . . . . . 42
2.7 Conclusion....................... 48

Chapitre 2. Modélisation hybride des convertisseurs de puissance32 à commutations
2 .1 Introduction
En électronique de puissance, les circuits à commutations, de par leur na
ture, présentent un comportement hybride. Ce type de circuits peut être decrit
par un ensemble dctats discrets avec des dynamiques continues associees. De
ce fait, on se concentre sur l'étude des circuits de l'électronique de puissance
en utilisant la structure des systèmes dynamiques hybrides [Sen03]. On pré
sente un modèle general pour les circuits de l'èlcctroniquc de puissance. De
manière générale, on peut affirmer que ce modèle est meilleur que les modèlesmoycnnisés ct/cm linéarises, en effet, il n'y a pas d'approximation impliquée
et la synthèse du contrôleur n'est pas limitée par le modèle.
Plusieurs analyses typiques des circuits à cornrnutations se basent sur les
techniques de moyennisation pour que l'étude du circuit soit simple. Avec ces
méthodes, les actions de commutations sont ignorees et les rapports cycliques
de commutations deviennent des gains dans la gamme [0, 1]. La fréquence de
commutation n'apparaît pas dans l'analyse et les trajectoires du système ont
une dérivée première continue. Ce qui permet d'obtenir un modèle moyennisé à
temps continu [Kas91]. Le modèle n'est pas à l'origine nécessairement linéaire
du fait des commutations, mais après moyennisation, il le devient et les rapports cycliques apparaissent comme des termes multiplicatifs dans l'équation
d'ôtat résultante.
Lne autre approche est de construire un modèle à temps discret ou échan
tillonné. Les valeurs des inconnus qui nous intéressent sont calculées seulement
aux instants discrets, synchronisés d'habitude avec la fréquence de commuta
tion. Comme dans rapproche de moyennisation, la frequence de commutationn'apparaît pas explicitement dans l'analyse. En revanche, par discrétisation,
on n'obtient pas nécessairement un modèle linéaire. Ainsi, il est courant, après
discrétisation, de faire une petite linéarisation du signal du modèle autour du
point d'intérêt du fonctionnement par calcul du jacobien du modèle en ce
point.
Il est clair que les modèles obtenus avec l'une ou l'autre methode sont limités en leur capacité de dècrirc les dynamiques du système car le comportement
du circuit entre les instants de cornrnutations est perdu ainsi que, parfois, le
pouvoir de prédire des phénomènes non linéaires importants.
De point de vue synthèse du contrôle, la performance du contrôleur est
limitée par la précision du modèle; le fait que les dynamiques du système
deviennent seulement approximccs, rend aussi inadéquate l'application des
techniques de contrôle linéaire.

2.2. Fonctionnement hybride des convertisseurs de puissance àcommutations 33
2.2 Fonctionnement hybride des convertisseurs
de puissance à commutations
Dans cette section, on définit formellement la classe des systèmes dyna
miques hybrides proposés pour l'étude des circuits dèlcctroniquo de puissance.
Ln circuit d'ôlectronique de puissance peut être decrit comme ôtant un réseau
de composants électriques choisis parmi les trois groupes suivants: les sources
idéales de tension ou de courant, les éléments linéaires (résistances, capacités,
inductances, transformateurs) et les éléments non linéaires agissant comme
des commutateurs.Le comportement d'un commutateur est considère idéal, ayant deux états
discrets: un circuit ouvert et un circuit court-circuité.
Dans un circuit de k commutateurs, il y a 2k états discrets possibles.
Cependant dans la pratique, ces états discrets ne peuvent pas être exécutés
tous. Quelques-uns ne sont pas faisables à cause des caractéristiques physiques
des commutateurs, tandis que d'autres sont interdits lors de la conception car
ils seraient destructeurs, inutiles ou inadaptés à l'application.
Le choix des éléments du circuit va permettre de generer les proprietes vou
lues, i. c., les dynamiques continues de chaque etat discret sont linéaires ou
affines. :.'\otons, toutefois, que ces dynamiques peuvent arbitrairement tolérer
une large déviation des états continus, ou permettre au système de demeurer
à un point dcquilibro trivial. C'est en exploitant les différences entre les dyna
miques des différentes configurations de commutations qu'un comportement
desire du circuit est atteint.
Ainsi, dans le cadre de la définition proposée, l'unique entrée du système
est le choix des états discrets. Les transitions discrètes ne sont pas nécessai
rement sous contrôle. Certaines transitions sont imposées par les caractéristiques physiques des éléments de commutations et l'évolution des courants et
des tensions dans le circuit.
2.3 Modèle hybride des convertisseurs de l'élec
tronique de puissance en cas du mode de
conduction continue
Définition 2.1 Soit o, ç Rn l'espace d'état continu et soit M{El, ... ,EN} un ensemble .fini d'états discrets. L'espace d'état continu spécifieles valeurs possibles des états continus pour chaque E, où E E M représenteles conjiquraiions onloff de tous les commutateurs dans le circuit. Comme décrit précédemment, les réseaux sont constitués de sources idéales, d'éléments

Chapitre 2. Modélisation hybride des convertisseurs de puissance34 à commutations
linéaires et de commutateurs idéaux; donc pour chaque E E M la dynamiquecontinue peut être modélisée par une équation différentielle de la forme :
X(t) = FdX(t)) = AEX(t) + BE, t > 0 (2.1)
La transition d'un Nat discret à un autre se réalise si l'état continu X(.)atteint une surface de commutations définie par (1.37) ou qu'un événement
périodique de type (1.38) s'est produit.
2.4 Modélisation
Il est simple d'élaborer le modèle hybride pour un circuit d'électronique
de puissance comme définie en (2.1). Xot.ons qu'à l'inverse des techniques de
modélisation déjà discutées, le modèle hybride donne le comportement exact
du circuit sans approximation.
Dans ce chapitre, deux exemples sont présentés. Les convertisseurs Beost et
Buck sont deux exemples de circuits d'électronique de puissance parmi les plus
connus dans la littérature. Ces convertisseurs sont des systèmes à commuta
tions dont la structure change avec le temps. Ils peuvent être modélisés par
un système hybride affine par morceaux.
2.5 Convertisseur Boost contrôlé en mode courant
Le convertisseur Beost contrôlé en mode courant et en boucle ouverte est
un système dynamique de dimension 2. Rappelons qu'en mode de conduction
continue, deux états de commutations sont envisageables:
Commutateur 5 fermé et diode D ouverte
Commutateur 5 ouvert et diode D fermée
Il y a deux états discrets: 15 fermé, D ouvert] et 15 ouvert, D fermé], qu'on
va appeler El et E2 respectivement. D'où, M = {El, E 2 } et l'état du système
est définie par X = [UrlLjT qui donne les équations d'état affines pour E i
(i = 1,2) de la forme de l'équation (2.1), où :
[ \f;, ]

2.5. Convertisseur Boost contrôlé en mode courant 35
Les fron tières de commutations des systèmes SI : X = A E j X +B E j et S2 : X =AE 2X + B E 2 sont données par un événement d 'état et un autre périodique:
13E j ,E 2 = {(X, t) E ]R2 X ]R : SI2(X) = ii. - I re! = O}13E 2,Ej = {(X, t) E]R2 x]R : P21(t) = t - nT = O}
(2.2)
Le convertisseur Boos t en mode de conduction cont inue commute entre deuxsystèmes SI et S2 quand les sections de commutations 13Ej ,E 2 et 13E 2,E j sontat teintes (voir le diagramme d'état en figure 2.1).
F IG. 2.1 - Diagramme d'état du modèle hybride des convert isseurs Boost etBuck.
2.5.1 Résultats de simulation et commentaires
Cette section présen te des résultats de simul ation du modèle hybride obtenu avec un solveur classique : Scilab jScicos. Toutes les simulat ions sonteffect uées avec les valeurs numériques des param ètres suivantes : L = 1.5 mH ,F = 10 khz, R = 40 D, Vin = 10V et C = 5/-l,F. Pour nos simulations on considère le courant de référence Ir e! comme param ètre de bifurcation. En faisantvarie r Ir e! le circuit cha nge son comportement qualitatif d 'un ét at périodiquest able à un autre ét at chaot ique.En utilisant Scicos (voir le schéma modèle de Scicos en figure 2.2), on commence par t racer le diagramme de bifurcation donné en figure 2.3 où I re! estun paramètre de bifurcation et ii. échant illonné est la vari abl e. En augmentantIr e! , le diagramme donné mon tre un doublement de période avec productionde la bifurcation collision frontière au point crit ique Ir e!c = 1.23A après unesolu tion 2T périodique. Ensuite, le système passe au comporte ment 4T périodique et suit la rou te de doublement de période vers le chaos où la bifurcationcollision de front ière peut ent rer en jeu .

Chapitre 2 . Modélisation hybride des convertisseurs de puissance36 à com m utat ion s
vc
iL
F IG . 2.2 - Modèle hybride du convertisseur Boost donné au simulateur numérique Scicos.
1.8
1.6
1.4
1.2
1.0idA) 1T périodique
0.8
/0.6
0.4
0.2
0.0
4T pério dique
2T périod ique
/
0.6 0.8 1.0 1.2Iref(A)
1.4 1.6
FIG . 2.3 - Diagramme de bifurcation du Boost dans le plan (Ire! , i L) pourI re! E [0.5, 1.6] et Vin = 10V fixé.
En augmentant I re! , on donne pour différent es valeurs de I re! la formed'onde temporelle du courant d 'inductance it. et son plan de phase uc - iL

2.5. Convertisseur Boost contrôlé en mode courant 37
correspondant.
Pour une valeur I r e f = O.7A, la figure 2.4 montre un régime périodique fon
damental. D'une part la figure 5(a) présente la forme d'onde temporelle du
courant ir" d'autre part la figure 5(b) donne le plan de phase correspondant.Ces deux figures prouvent la nature stable et périodique du circuit. Ce régime
périodique n'est possible que pour des valeurs faibles de I r e f .
Pour I r e f = l A et I r e f = 1.3A, des régimes subharrnoniques ont été observés.
La figure 2.5 présente un cycle 2T périodique, tandis que la figure 2.6 illustre
un cycle 4T périodique. Le regime chaotique est donné en figure 2.7 pour une
valeur I r e f = 1.5A : (a) indique un signal chaotique avec un ordre infini et (b)
le plan de phase (uc,id correspond à un attracteur chaotique.

Chapitre 2 . Modélisation hybride des convertisseurs de puissance38 à com m utat ion s
0.5 1.0 1.5 2.0 2.5 3.0 3.5 x 10- 4
t(S)
0.80
0.75
0.70
0.65
0.60idA) 0.55
0.50
0.45
0.40
0.35
0.0
(a)
16.5
16.0
15.5
VC (V)15.0
14.5
14.0
0.45 0.50 0.55 0.60
idA)
(b)
0.65 0.70
FIG . 2.4 - Régime périodique fondamental pour Ir e! = O. 7A : (a) forme d'ondetemporelle du courant it. , (b) plan de phase (vc , iL) ' (On a évité de visualiserle régime transitoire en prenant la condition initiale appartenant au cycle).

2.5 . Convertisseur Boost contrôlé en mode courant 39
1.1
1.0
0.9idA)
0.8
0.7
0.6
0.5
0.0 2 3t (s)
4 5 X 10- 4
(a)
22
21
20
19vc(V)
18
17
16
15
14
130.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1
idA)
(b)
FIG . 2.5 - Cycle d 'ordre 2 pour Ir e! = lA : (a) forme d 'onde temporelle ducourant iL , (b) plan de phase (vc , iL) '

Chapitre 2 . Modélisation hybride des convertisseurs de puissance40 à com m utat ion s
1.3 - - - - - - - - - - - - - - - - - - - - - - - - - - - -
1.2
1.1
1.0iL (A)
0.9
0.8
0.7
0.6
0.5
a 2 3 4 5
t(S)(a)
6 7 X 10- 4
28
26
24
22VC (V )
20
18
16
14
12
0.5 0.6 0.7 0.8 0.91.0 1.1 1.21.31.4
idA)
(b)
FIG. 2.6 - Cycle d 'ordre 4 pour Ir e! = 1.3A : (a) forme d 'onde temporelle ducourant iL , (b) plan de phase (VCl i L)'

2.5 . Convertisseur Boost contrôlé en mode courant
1.6
1.4
1.2id A)
1.0
0.8
0.6
41
0 0.5 1.5 2.0 2.5 3.0 3.5 x 10- 3
t(s)
(a)
28
26
24vc (V )
22
20
18
16
14
0.6 0.8 1·e 1.2 1.4ii. A)
(b)
F IG . 2.7 - Régime chaot ique pour I re! = 1.5A : (a) forme d'onde temporelledu courant i L, (b) plan de phase (vc , i L)'

Chapitre 2. Modélisation hybride des convertisseurs de puissance42 à commutations
2.6 Convertisseur Buck contrôlé en mode ten-.
SIon
Le convertisseur Buck contrôlé en mode tension et en boucle ouverte est
un système dynamique de dimension deux. En mode de conduction continue,
deux états de commutations sont envisageables:
Commutateur 5 ouvert et diode D fermée
Commutateur 5 fermé et diode D ouverte
Il y a deux etats discrets: 15 ouvert, D fermé] et 15 ferme, D ouvert], qu'on
va appeler El et E 2 respectivement. D'où, M = {El, Ed et l'Nat du système
est définie par X = [UclLjT qui donne les équations d'état affines pour E i (i= I ,2)
de la forme de l'équation (2.1), où :
[-1, 1,] [0 ] [ 0 ]AiS] = A iS2 = ~ 8 ,BiS] = 0 et B iS2 = vr'
La transition d'un système à un autre se produit due à un événement temporel
définie par l'expression suivante:
P(X, t) = uwn(t) -urarnp(t)= a(vc(t) - 1/;'ef) - VL - (Vu - VdJ-; for t E [0, T]
Les sections de commutations des systèmes 51 et 52 sont données par:
BiS2,iS] = {(X, t) E ~2 X ~: P(X, t) ::;. O}{)b'] ,b'2 = {(X, t) E ~2 X ~ : P(X, t) < O}
(2.3)
(2.4)
Le convertisseur Buck en mode de conduction continue commute entre deux
systèmes 51 : X = Ab'] X + Db'] et 52 : X = Ab'2X + DH2 quand l'état :r:(t)atteint les sections de commutations {312 etB2 1 (voir le diagramme d'ôtat en
figure 2.1).
2.6.1 Résultats de simulation et commentaires
Dans cette section nous présentons les simulations du modèle hybride ef
fectuées par un solveur classique (scialb/scicos). Nous avons fixé les para
mètres du système aux valeurs suivantes: L = 30mH, T = 400/1s, R = 220,
C = 47J1.F, a = 8.4, 1/;'ef = 11.3V, VL = 3.8V et Vu = 8.2V et choisi commeparamètre de bifurcation la tension d'entree Vin' En variant cette dernière, le
circuit change son comportement qualitatif d'un régime fondamental stable à
un autre qui est chaotique.
Les résultats de simulations effectuées montrent que la variation de Vin a
conduit à la generation du chaos par une succession de doublements de pô
l'iode interrompue par des bifurcations collision de frontière en certains points

2.6 . Convertisseur Buck contrôlé en mode tension 43
crit iques tels que Vine = 41.45V. Ce phénomène est illustré par le diagrammede bifurcation obtenu par Scicos (voir figure 2.9).
iL
FIG . 2.8 - Modèle hybride du convertisseur Buck donné au simulat eur numérique Scicos.
46444236 38 40
Vin(V)
3432
4T périodique
2T Pér iO\diQue \
1T périodique
\ ~~
12.6
12.5
12.4
12.3
vc(V)12.2
12.1
12.0
11.9
11.8
30
FIG . 2.9 - Diagramme de bifurcat ion du convertisseur Buck da ns le plan(Vin,VC) pour Vin E [30, 47] et Y;.ef = 1l.3V fixé.

Chapitre 2. Modélisation hybride des convertisseurs de puissance44 à commutations
Pour différentes valeurs de Vin, on donne la forme d'onde de la tension Ve
et son plan de phase correspondant (ve, id.En choisissant Vin = 30V, on obtient un régime périodiquo fondamental. Ceregime n'est possible que pour des valeurs petites de Vin. La figure 2.10 montrele regime périodiquo fondamental: (a) la tension aux bornes de la capacité et
(b) le plan de phase correspondant. Pour les tensions Vin = 37.5V et Vin =41V, il en résulte un régime subharrnonique. La figure 2.11 présente un cycle2-T périodique, alors que la figure 2.12 illustre un cycle 4-T périodique.
La figure 2.13 montre la forme d'onde temporel d'un signal chaotique, le plande phase (?Je, id correspond à un attracteur chaotique, est donné pour une
tension Vin = 46.5V.

2.6. Convertisseur Buck contrôlé en mode tension 45
12.12
12.10
vc (V)12.08
12.06
12.04
12.02
o 1 2 3 4 5 6 7 8 9 X 10- 4
t(S)(a)
12.12
12.10
12.08VC (V)
12.06
12.04
12.02
0.50 0.52 0.54 0.56 0.58 0.60idA)
(b)
F IG . 2.10 - Régime périodique fondamental pour Vin = 30V : (a) forme d'ondetemporelle de la tension uc , (b) plan de phase (vc , iL )'

Chapitre 2 . Modélisation hybride des convertisseurs de puissance46 à com m utat ion s
12.30
12.25
12.20
12.15VC (V )
12.10
12.05
12.00
11.95
11.90
0 5 10 15 20 25 x 10- 4
t(s)
(a)
12.30
12.25
12.20
12.15vc( V)
12.10
12.05
12.00
11.95
11.90
4.8 5 5.2 5.4 5.6 5.8 6 6.2 x 10- 1
id A)
(b)
FIG . 2.11 - Cycle d'ordre 2 pour Vin = 37.5V : (a) forme d'onde temporellede la tension VC, (b) plan de phase (vc , iL)'

2.6 . Convertisseur Buck contrôlé en mode tension 47
12.4 4T.. •12.3
12.2
Vc(V)12.1
12.0
11.9
11.8
0 5 10 15 20 25 30 35 x 10- 4
t (s)
(a)
12.4
12.3
12.2vc (V )
12.1
12.0
11.9
11.8
0.45 0.50 0.55id A)
0.60 0.65
(b)
F IG . 2.12 - Cycle d'ordre 4 pour Vin = 41V : (a) forme d 'onde temporelle dela tension vc, (b) plan de phase (vc , iL )'

Chapitre 2 . Modélisation hybride des convertisseurs de puissance48 à commutations
12.8
12.6
12.4VC (V)
12.2
12.0
11.8
o 2 4 6 8 10 12 14 16 18 x 10- 3
t(S)(a)
12.8
12.6
12.4
VC (V)12.2
12.0
0.45 0.50 0.55id A)
(b)
0.60 0.65 0.70
F IG . 2.13 - Régime chaotique pour Vin = 46.5V :(a) forme d'onde temporellede la tension Vc, (b) plan de phase (vc , iL )'
2.7 Conclusion
Dans ce cha pit re, nous avons présenté le modèle hybride des convertisseursde l'électronique de puissance. Comm e exemples d'applicat ion nous avons citéle convertisseur Boost cont rôlé en mode courant et le convertisseur Buck

2.7. Conclusion 49
contrôlé en mode tension. Nous avons donné une étude numerique de cesconvertisseurs en nous basant sur l'outil numérique Scicos de Scilab. :.'\ousavons montré pour le cas du Beost, que la variation du courant de référence
mène à une route vers le chaos; le système suit une cascade de doublementde période avec des perturbations par une bifurcation collision de frontière
en certains points critiques. Pour le cas du Buck, la variation de la tensiond'entrée amène le système à une route de doublement de période interrompue egalement par une bifurcation collision de frontière en certains pointscritiques.


CHAPITRE 3
Simulation précise des systèmeshybrides planaires affines par
morceaux
Sommaire3.1 Introduction
3.2 Frontière fixe
3.2.1
3.2.2
3.2.3
3.2.4
Système dynamique hybride étudié . . . . . . . .
Simulation des systèmes hybrides affines par morceaux
et détection d'événements .
Algorithme qui détecte l'occurrence des événements.
Etude des cas . . . . . .
52
53
53
54
54
57
3.2.5 Architecture du solveur 64
3.2.6 Exemple d'application . 64
3.2.7 Exemple du convertisseur I300st entre deux limites 65
3.2.8 Exemple du convertisseur I300st contrôlé en mode courant 68
3.3 Frontière mobile . . . . . . . . . . . . . . . . 77
3.3.1 Processus général. . . . . . . . . . . . . . . 77
3.3.2 Exemple du convertisseur Buck contrôlé en mode tension 78
3.4 Conclusion.......................... 83

Chapitre 3. Simulation précise des systèmes hybrides planaires52 affines par morceaux
3 .1 Introduction
La dynamique des circuits à commutations est le plus souvent simulee enutilisant des méthodes numériques pures dont le pas de précision augmente au
fur et à mesure que le système se rapproche de la condition de commutation.
Ces outils numériques sont largement utilisés principalement à cause de leur
facilité d'utilisation et de leur capacité à simuler une considérable gamme de
circuits y compris les systèmes non linéaires, autonomes et non autonomes.
Même si ces simulateurs peuvent atteindre la précision relative désirée
pour une trajectoire continue, ils peuvent négliger certaines conditions de
commutation et par suite diverger radicalement de la trajectoire réelle du
système comme le montre la figure 3.5. Cela peut être embarrassant si on
s'intéresse aux bifurcations de type collision de frontière, ou lorsqu'on exige
qu'un comportement local soit donné avec une meilleure précision. Pour ce
genre d'applications, une solution est d'inclure les trajectoires analytiques ou
scrni-analytiqucs et les conditions de commutations pour obtenir une récur
rence qui est très précise et rapide à executer. La construction et l'adaptation
de tels simulateurs acl'hoc nécessitent de grands efforts et présentent d'amples
risques d'erreurs.
Des simulateurs generiques exacts peuvent être proposés si on se limite
à une certaine classe de systèmes. Un outil de simulation qui permet une
meilleure détection de l'occurrence des événements pour les systèmes hybrides
affines par morceaux dont l'état continu se trouve dans un polytope convexe
ferme, est presente dans les références IGir021 et IGir041. Il est connu que lafamille des systèmes differentiels affines par morceaux, est largement etudiee
comme une technique d'approximation des systèmes non linéaires. Mais, une
répartition de l'espace d'états en un polytope convexe fermé ne permet pas la
simulation de la plupart des circuits à commutations où les frontières de com
mutations sont le plus souvent définies par une hypersurface affine et uniqueou par des événements temporels périodiques. Dans ce chapitre, on s'inté
l'esse aux systèmes hybrides affines par morceaux plans avec des conditions
de commutations simples qui peuvent modéliser une classe de circuits à com
mutations planaires comme: le bang-bang, les régulateurs, le convertisseur
Boost, la boucle à verrouillage de phase (PLL), ...
Cette classe de systèmes possède des trajectoires analytiques qui aident à
obtenir un algorithme rapide et précis. Ce dernier permet de détecter l'occurrence des événements dètats et de déterminer leurs dates exactes. On propose
ainsi un solvcur scrni analytique des systèmes dynamiques hybrides qui repose
sur:
1; ne methode numerique pure quand le système est non linéaire ou non
planaire;

3.2. Frontière fixe 53
- Une méthode analyt ique pure quand tout es les parties du système et lescondit ions de commutations peuvent être résolus symboliquement . Celapeut êt re le cas du convertisseur Boost [Bou07] et [Tse03] et de la PLLen 2èm e ordre [Acc03], [Hed97] et [Pae94] ;
- Une méthode mixte avec des trajectoires analyt iques et un calcul numérique des instants de commutations, quand ces solu tions sont transcen dantes. Cette méthode a été adoptée pour la simulation de la CP-PLLen 3ème ordre [Hed97]. Cela peut êt re aussi le cas du convertisseur Buck[eG08b] et [Tse03], . ..
3.2 Frontière fixe
3.2.1 Système dyna m ique hybride étudié
On considère un système hybride affine par morceaux de dimension 2(X(t) E ]R2) , définie par l'équation (1.36) . On t ient compte de deux typesd'événements : les événements d'états et les événements temporels périodiques.Les événements d 'états S EiEj sont définis par les frontières affines d 'états dela forme Nq. X < lij . Dans ce cas, un événement survient quand l'état X(.)at teint une frontière de l'ensemble : S EiEj = {X(t) E ]R2 : Nq. X. :::; lij} .Notons que la surface S EiEj est ouverte.Nous admettons, sans perte de généralité, le cas où une transition se produità un temps dSEiEj si et seulement si l'état X(dSEiEj) at teint une frontièrede l'ensemble S EiEj de l'extérieur. La figure 3.1 présente une transition avecl'ensemble complémentaire 5, ce qui permet de détecter l'événement dans lesdeux directions. Les deux transitions peuvent êt re croisées avec l'ensemble
FIG. 3.1 - Transitions dépendant de l'état et de l'orientation.
B =su5.

Chapitre 3. Simulation précise des systèmes hybrides planaires54 affines par morceaux
3.2.2 Simulation des systèmes hybrides affines par morceaux et détection d'événements
La d'un modèle hybride itère les variables dctats continues et discrètes
d'un événement à un autre [eG08a]. Pour cela on utilise un algorithme qui,à partir d'un instant tA; où les variables d'état X(tAJ et E(tt) sont connues,determine l'Nat hybride du système à l'instant tA;+! où un événement intervient. Connaissant l'Nat continu et admettant que l'état discret est constantE(t > tt) = E(tt), on peut trouver la trajectoire en considérant :
Cette simulation nécessite une methode appropriee que l'on peut décomposer
en quatre etapes :
calcul des dates t i des événements pouvant se produire;sélection de l'événement arrivant en premier, on note sa date tHl ;
- calcul des variables dètats continues à l'instant tH!, on les note X H! ;- calcul des variables discrètes immédiatement après la commutation
ayant lieu à l'instant tH!, notees EH!,L'algorithme suivant calcul le prochain état hybride qui correspond à la pluspetite date positive au prochain événement détecté:
Données: i«, XA;, EA;.tant que t < tfin faire
Calcul de toutes les dates d'événements détectés : dSb"ib"j et dPb"ib"j
tA;+l = min(dSH i H j , dPH i H j ) ;
X H! = f (XA;, EA;, tHd;EH! = cp (XA;, EA;, tH!);
fin
Algorithme 3.1 : Algorithme qui calcule l'état hybride à tHl
3.2.3 Algorithme qui détecte l'occurrence des événements
On considère un problème de Cauchy affine sur ]R2 :
{X(t) = AX(t) + D,X(to) = X o
t > t o (3.1)
où X o est la valeur initiale.On désire calculer le plus petit instant strictement positif t* pour lequel latrajectoire de l'état X(t) coupe la frontière fixe Bi arrivant du plan où Ni.X <

3.2. Frontière fixe 55
(3.3)
li' La fonction fi(t) = Ni.X(t) - li définit la condition de garde pour unefrontière Bi. Ainsi, le problème peut être formulé comme suit
Trouver le plus petit t* > 0 tel que { ~(~*) ~ ~ ] * c, *[ .f·(t) < 06 > , t E t - 6, t ,(3.2)
Si la fonction fi ne possèdo aucune racine strictement positive ou que la dernière condition n'est pas satisfaite, on donne à t: la valeur infinie.
3.2.3.1 Trajectoires analytiques
La trajectoire analytique X(t) est donnée par la forme intégrale généralesuivante:
X(t) = eA(t-to) X o + t eA(t-s) Bds.flo
Quand la matrice A est inversible, l'expression précédente devient linéaire :
(3.4)
L'expression analytique de la matrice exponentielle e,11 prend deux formes
selon que les valeurs propres PI et P'2 de la matrice A sont egales ou non.En effet, soit
(PIIT - Aü)
Pl - P2
(P'2 IT - AD)
lh - P2(3.5)
Si Pl = P2 = P, alors(3.6)
En utilisant ces expressions, on peut determiner la fonction f(t) du problème
(3.2) qui prend la forme:
f·( ) '2 ( ) P t p' t. t = (ll + (l2 t + (l:i t + (l4 + (l5 tel + (l6 e 2
où les ai sont des scalaires réels.
Selon les valeurs propres lh et P2, il y a cinq cas qui déterminent les valeursdes coefficients (li comme montre le Tableau 3.1.
Les coefficients ai sont des scalaires réels qui dépendent des valeurs propresPI et P'2, du présent point X k et des paramètres Ni et li de la frontière decommutations.

Chapitre 3. Simulation précise des systèmes hybrides planaires56 affines par morceaux
f( t) = al+··· Pl E)R* Pl = 0
P l = P2 E C*
P l = P2 E )R*
TAB. 3.1 - Expressions de f( t) selon les valeurs propres P l et P2.
Dans certains cas (P l = P2 = 0, la cellule grise dans le Tableau 3.1),les racines de la fonction f(t) peuvent être retrouvées analyt iquement et leproblème est résolu avec la précision de la machine .
Dans les au tres cas, la solution peut êt re retrouvée avec des fonct ions classiques et par suite un algorit hme numérique doit êt re utilisé. L'utilisation desméthodes classiques comme Newton ne garantit pas l'exis tence ou la convergence de la plus petite racine. Pour satisfaire ces conditions, on utilise lesracines analytiques de la fonction dérivée J'( t) donn ée au Tableau 3.2.
J'( t) = ...
P2 E )R*
P2 = 0
Pl = P2 E C*
P l = P2 E )R*
Pl E )R* Pl = 0
TAB . 3.2 - Expressions de f'(t) suivant Pl et P2
On peut donccines ordonnées demonotones de f (t)trouver la solution
calculer analytiquement l'ensemble Lf' (t) . Ces racines déterminent deset l'algori thme suivant est utili sé
t* quand elle existe ou la valeur
des raintervallespour re
00 sinon.

3.2. Frontière fixe
Données: Ni, li, A, D, x,Résultat: construction de l'ensemble L, calcul de t*
T +- {O,L,oc};t* +- CXJ;pour i +- 1 à (card(T) - 1) faire
si f(T(i)) < 0 & f(T(i + 1)) > 0 alors
1
t* +- I.'ôsoudre [T. (i), T(i + 1)];Sortie de boucle;
finfin
Algorithme 3.2 : Algorithme qui calcule t* quand la solution est transcendante
57
Remarque 3.1 Quand (PI, P2) E C* x C*, l'ensemble L est infinie: lorsque la
partie réelle de Pi est positive, L'exécution de l'algorithme précédent donne une
racine. Dans les autres cas, l'ensemble L doit être limité aux trois premiers
éléments, pour retrouver le point d'intersection quand il existe.
Remarque 3.2 La fonction f peut avoir la forme d'une parcbole. on peut
avoir trois cas qui peuvent donner une solution t* > O. La jiqure 3.2 donne les
formes possibles de f.
La fonction f peut dans certains cas, admettre un point d'infie.'Cion t u u , il Y a
trois cas pour lesquels une solution t* > 0 peut exister. La figure 3.3 schématise
ces trois cas.
3.2.4 Etude des cas
3.2.4.1 Cas de deux valeurs propres réelles non nulles
On considère le cas où la matrice A a deux valeurs propres réelles non
nulles PI et P2·On suppose sans perte de généralité que Pl > lh
Dans ce cas.la matrice A est inversible et la matrice exponentielle eAt estdonnée par la formule (3.5) qui peut être écrite sous la forme:
(3.7)
où(PIIT - AO)
Pl - P2et
(P2IT - AO)
Pl - P2

Chapitre 3. Simulation précise des systèmes hybrides planaires58 affines par morceaux
Bonne solution
Solution impossible
Solution impossibl e
lin1
1
1
1
1
1
nes: {)
i n < 0
(a)
o
f(O) < 0
Bonne solut ion
o L"
- - - - - - - - - -~~--.----:
f(i n ) < 0
i n > 0
(b)
Solution impossiblef(i n ) > 0
o
i n > 0
(c)
Bonne solution
i *
FIG . 3.2 - Recherche d 'une rac ine t * > 0 d 'une fonction parabolique.

3.2. Frontière fixe
o
o
f(O) < 0
i "
tn n < 0
(a)
Itn n
1
1
1
t -.« > 0
(b)
o
f(O) < 0
59
t -.« > 0
(c)
F IG. 3.3 - Recherche d 'une rac ine t * > 0 d 'une fonction admettant un pointd 'inflexion tnn-

Chapitre 3. Simulation précise des systèmes hybrides planaires60 affines par morceaux
La solution X(t) a la forme donnée en (3.4). Posons X(t) = X(t) + A- I B onobtient: X(t) = eA(t-to)Xo où X o = X o + A-lB.
Donc la fonction f est donnée par :
f(t) = N.X(t) - [
avec [= l + NA-lBSi on remplace X(t) par son expression en utilisant la forme exponentielle
donnée en (3.7), pour ta = 0 on obtient alors:
avec
La première et la seconde dérivée f' et fil de f sont alors:
f' (t) = œ p, eP Ji - /3 P'2 eP2 t
f"(t) = (lPTeP11 - .Bp~eP2t.
Selon les valeurs de 0: et notre analyse est présentée par l'algorithme donné
en Annexe A.1.
3.2.4.2 Cas d'une seule valeur propre réelle non nulle (l'autre estnulle)
On considère le cas où la matrice A a une seule valeur propre réelle non
nulle Pl = P et P2 = o.Dans ce cas, la matrice A n'est pas inversible et la matrice exponentielle eAt
est donnée par la formule (3.5) qui peut être écrite sous la forme:
(3.8)
où
et
(l =(p li - AD)
P
4D
.(J=-"-P
La solution X (t) a la forme donnée en (3.3) et la fonction f est donnée par :
f(t) = iV.X(t) -l

3.2. Frontière fixe 61
Si on remplace X(t) par son expression en utilisant la forme exponentielledonnée par (3.8) on obtient alors:
avec
_ 7\T A.0X 7\T(pI-. ,10) n.a] - 1V P 0 - 1V -P- p'
La première et la seconde dérivée f' et .1" de .1 sont alors:
f'(t) = (Ji2 + pCJ!;iep t
f"(t) = p2a3 epl.
Selon les valeurs de a], a2 et Ct:" notre analyse est présentée par l'algorithmedonné en Annexe A.2.
3.2.4.3 Cas de deux valeurs propres réelles égales
On considère le cas où la matrice A a deux valeurs propres réelles égales
et non nulles (Pl = P2 = P =1- 0).Dans ce cas, la matrice A est inversible et la matrice exponentielle eAt estdonnée par la formule (3.6).
La solution X(t) a la forme (3.4) et on peut faire le changement de variableX(t) = X(t) + A-] B comme en section 3.2.4.1.
Donc la fonction .1 al'expression :
f(t) = iYX(t) - [
Si on remplace X(t) par son expression en utilisant la forme exponentielle(3.7) on obtient alors:
avec
La première et la seconde dérivée f' et .1" de .1 sont alors:
Selon les valeurs de Ct] et Ct2, notre analyse est presentee par l'algorithmedonné en Annexe A.3.

Chapitre 3. Simulation précise des systèmes hybrides planaires62 affines par morceaux
3.2.4.4 Cas de deux valeurs propres nulles
On considère le cas où la matrice A a deux valeurs propre nulles PI = P'2 =O.Dans ce cas, la matrice A n'est pas inversible et la matrice exponentielle eAt
est donnée par la formule (3.6).
La solution X(t) a la forme (3.3) et la fonction f est définie par:
f(t) = iv'X(t) - l
Si on remplace X(t) par son expression en utilisant la forme exponentielle(3.8), on obtient alors:
avec
0:1 = -N'1ü
B 0:2 = N(-Ao X o+ liB) et ()!:i = NliXo-l
Le discriminant de f est :
Selon les valeurs de al, a'2, Ct:, et 6., notre analyse est présentée par l'algorithmedonné en Annexe A.4.
3.2.4.5 Cas de deux valeurs propres complexes
On considère le cas où la matrice A a deux valeurs propres complexes
conjuguées lh et P2 :
PI = Re + i LmP'2 = Re - i Lm
avec Re E]R et lm E ]R+*.
Dans ce cas, la matrice A est inversible et la matrice exponentielle eAt estdonnée par la formule (3.6) que l'on peut écrire sous la forme:
e,1! = eHcI (li cos(Im t) + NI sin(Im t))
avec

3.2. Frontière fixe
La solution X(t) a la forme (3.4).
Donc la fonction f est donnée par :
f(t) = N.X(t) - [
63
Si on remplace X(t) par son expression en utilisant la forme exponentielle
(3.7) on obtient alors:
f (t) = c RetPcos (Im. t - Y?) - ï
avec
P = JOVXo)2 + (N NIXo)2 et Y? = arg(NN:~O).
L ièrivé f'l i f' ta ( envee, (e, est :
avec
Pd = (ReNXo+ ImN ivIXoF + (ReN ivIXo - lm NXoF
et
( Re ~V~o + ImN i~~Xo)Y?d = arg - -.Re N ivIXo - ImiYXo
Les extrema sont obtenus pour f'(t) = 0 ce qui est équivalent à
'iflm t - Y?d = "2 + tut: avec 71 E Z
Les instants ta auxquels la fonction f (t) possède des extrema sont :
a ('if ) 1t = - + ru: - Y?d - avec ri E Z.2 lm
Sachant que lm E jR+*, les instants ta > 0 sont donnés pour 71 2: no où
Donc il suffit de chercher les 71 2: no pour avoir les instants t':n.in et t~nax et parsuite l'intervalle [t':nin, t~nax] où la solution t* du problème peut exister.Selon les valeurs de Re, notre analyse est presentee par l'algorithme donné enAnnexe A,5,

Chapitre 3. Simulation précise des systèmes hybrides planaires64 affines par morceaux
3.2.5 Architecture du solveur
:.'\otre solveur serni-numèrique est composé de différents programmes prin
cipaux qui définissent le système affine étudié. D'abord on crée un système
affine donné sous un nom choisi, on définit les matrices Ai et Bi, puis on donne
les frontières de commutations avec le signe de transition et tous les clémentsnécessaires ou on donne la période quand il s'agit d'un événement périodique.
Après cela, on lance la simulation en précisant l'état initial et le temps de
simulation.Les lignes suivantes définissent l'exemple du convertisseur Beost contrôlé
en mode courant.
H = crcatc_hybrid_systcm('Boost - Convcrtcr');H = add_statc(H, 1,' On', Al, BI) ;H = add_state(H, 2,' Off', A2, B2) ;H = add_euent(H, 1,' Lte]', NI, Lims:' <') ;H = add_transition(H, 1,2,1) ;
H = add_pcriodic_cvcnt(H, 2,' Clock', T, 0);H = add_pcriodic_transition(H, 2,1,2) ;
Han = H;X an = hsim(Han, XO, 4 *T) ;
3.2.6 Exemple d'application
:.'\otre approche serni-analytique expliquée avant a été implémentée et tes
tée en utilisant le système hybride affine par morceaux suivant (figure 3.4)
(3.9)
avec les événements dètats donnés par les frontières des ensembles suivants:
SEj r;2 = {X E ]R2 : [1 0] X < -0.5l3036}SE2 r; j = {X E]R2: [0 l]X < l}
(3.10)
Pour illustrer l'efficacité de notre approche, nous avons comparé nos résul
tats de simulation avec ceux obtenus par le solveur numérique Scicos (ODE
"lsoda"). La figure 3.5 qui représente les deux simulations différentes avec
une condition initiale X o = [0; 0.17] et la même précision relative et absolue,
montre que la trajectoire de Sciees representee par une courbe en tirets dans

3.2. Frontière fixe 65
le tracé, a sauté un événement d'état qui est détecté par notre algorithme à
t = 11.096993 s.
En ce qui concerne le temps d'exécution, notre solvcur permet une simula
tion rapide pendant un temps tsolveUT = 0.218 s alors que le solvcur numerique
Sciees donne un temps dcxècution de l'ordre de tscicos = 0.468 s
3.2.7 Exemple du convertisseur Boost entre deux limites
L'exemple présent est donné pour un convertisseur I300st dont le courant
d'inductance commute entre deux limites inférieure Jref ] = lA et supérieure
Jref'2 = 0.5A. Il s'agit donc d'un système hybride affine par morceaux définipar les sous-systèmes :
[-1
~~]X(t)+[0 ]S] X(t) = ne
0 h.u.L
(3.11)
[-] t ]X (t) + [ V~n ]S2 : X(t) = ne-1T,
avec les evenements dètats définissant les limites des courants Jref ] et Jref'2
qui sont définis par les frontières fixes des ensembles suivants:
81';11')2 = {X E ffi.'2 : [0 1] X < 1}81';21')1 = {X E ffi.'2 : [0 1] X < 0.5}
(3.12)
Les valeurs des paramètre R, C et L sont prises de la même façon que dans
la section 2.5.1 du chapitre précédent, pour une valeur de tension d'entrée fixe
Vin = 10V.
La figure 3.6 donne les résultats de simulation obtenus par notre solvcur
serni-analytique. Les formes d'onde temporelles de la tension Ve et du courant
ii. sont tracées en figure 3.6(a). Par ailleurs le plan de phase est illustré en
figure 3.6(b).
La figure 3.6(a) montre la forme d'onde temporelle du courant qui est un
signal périodiquo de période T = 169.3jIS, qui varie dans l'intervalle [0.5,1 ]A.
Dans cette figure le trait bleu représente la trajectoire du premier système SI,alors que la trajectoire du deuxième système S2 est représentée par le trait
rouge. Le premier événement survient quand le courant iL descend à la valeur
0.5A. Cela arrive à la date tO.5A = 9.43jIS, l'autre événement arrive à la date
t]A = 169.3jIS.

Chapitre 3. Simulation précise des systèmes hybrides planaires66 affines par morceaux
FIG . 3.4 - Diagramme de transition de l'exemple d 'application.
/ ' t "' ~,; /~2.044783 .
Simulation semi-analytique
Simulation par Scieos
2.0
1.5
1.0
0.5
NX
0.0
- 0.5
-1.0
- 1.5- 2.0 -1.5 -1.0
7.645797
- 0.5
X(1)
0.0 0.5 1.0 1.5
FIG . 3.5 - Simu lation de Scicos versus notre simu lation semi-analytique.

3.2. Frontière fixe 67
21
20 .0000943 .000263 4
19
VC(V)18
17
16
15
14 .000 1693
13O.Oe+OOO 5.0e-005 1.0e-004 1.5e-004 2.0e-004 2.5e-004
1.0
0.9
0.8
id A)0.7
0.6
0.5 .00009 43 .000263 4
004
O.Oe+OOO 5.0e-005 1.0e-004 1.5e-004 2.0e-004 2.5e-004t (s)
(a)
1.1
1.0
0.9
0.8
id A)
0.7
0.6
0.5
004
13 14 15 16 17 18 19 20 21vc (V )
(b)
F IG . 3.6 - Boost ent re deux limites de courant I re f l = l A et I re f 2 = O. 5A : (a)(haut) forme d 'onde tempo relle de la tension vc , (bas) forme d 'onde tempo relledu courant ii. : (b) plan (vc , i L)'

Chapitre 3. Simulation précise des systèmes hybrides planaires68 affines par morceaux
3.2.8 Exemple du convertisseur Boost contrôlé en modecourant
Dans le chapitre précédent, la modélisation hybride du convertisseur Beost
contrôlé en mode courant a donné un système hybride affine par morceaux
défini par:
[-1
~]X(t)+[0 ]He
0 b.a.L
(3.13)
[-1
b ] X() [0]ne-1 o t + vtL
Dans le cas du convertisseur Boost contrôlé en mode courant, il y a deux types
d'ôvônements :
un événement d'état défini par la frontière fixe de l' ensemble SHI H2
(3.14)
et un autre périodique défini par les instants t = dPr;;r;j' où dPr;;r;j appar
tient à l'ensemble
(3.15)
où T est la période de cet événement périodique.
Les différentes simulations ont été effectuées à l'aide de notre solveur serni
analytique.
Avant de faire une etude des bifurcations observées dans ce circuit, une
simulation numerique dans le plan paramétrique est necessaire. La figure 3.7
du plan paramétrique permet de mettre en évidence les valeurs des paramètres
pour lesquelles il existe au moins un attracteur (point fixe, cycle d'ordre k,attracteur etrange). Dans cette figure, une distinction est faite entre les attracteurs de type cycle attractif d'ordre 1 à 14. A chaque cycle d'ordre k estassociée une couleur.
Par exemple, les zones bleues 01 représentent les valeurs des paramètres pour
lesquelles il existe un point fixe attractif (régime périodique fondamental),
les zones rouges 02 représentent l'existence d'un cycle attractif d'ordre 2, les
zones jaunes 04 représentent l'existence d'un cycle attractif d'ordre 4 et ainsi
de suite jusqu'aux cycles 014 d'ordre k = 14. Les zones noires 0+ corres
pondent aux valeurs des paramètres (Ire}, Vin) pour lesquelles il existe descycles d'ordre k 2: 15 ou d'autres types d'attracteur. Dans ces zones desphénomènes chaotiques peuvent être observés. Ce diagramme bidimensionnel
montre certaines courbes de bifurcation.En effet, pour le rectangle défini par l'intervalle du paramètre Vin E [7,15] et

3.2. Frontière fixe 69
du paramètre Ire! E [0.5, 1.6], on observe une zone de couleur bleue (existenced 'un point fixe attractif) suivie par une zone de couleur rouge (existence decycle d 'ordre 2), une zone de couleur jaune (exist ence de cycle d 'ordre 4) etune autre de couleur noire (existence de cycle d 'ordre k 2: 15 ou d 'un autretyp e d 'at tracteur) ; cette success ion de zones correspond à l'exist ence d 'unecascade de doublements de période.Cette représentation du plan paramé trique ne suffit pas à ét ablir une structurede bifurcation du modèle hybride du converti sseur Boost , mais elle est util epour l'initialisation des programmes de tracer des cour bes de bifurcation.
0 1 02 0 3 0 4 05 06 0 7 08 0 9 0 10 0 11012013014 0+
20
15
:;-cs
10
50.6 0.8 1
Iref(A)1.2 1.4 1.6
FIG . 3.7 - Diagramme de balayage du Boost dans le plan (Ire!, Vin) pourIre! E [0.5, 1.6]A et Vin E [5, 20]V.

Chapitre 3. Simulation précise des systèmes hybrides planaires70 affines par morceaux
La figure 3.8 présente un diagramme de bifurcation (type Feigenbaum)dans le plan (Irej , iL )' La figure 3.9 présente un diagramme de bifurcationdans le plan (Irej , it. , vc) . Dans ces deux figures, la tension Vin est fixé à 10Vet le courant I rej varie dans l'intervalle [0.5, 1.6] . On observe une cascade dedoublement de période menant à un régime chaotique, interro mpu par unebifurcation collision de front ière au point I rej = 1.23A (voir figure 3.10).
/0.4
0.6
0.8
1.2
1.6.--------,----,---------,---------,----,---------,--------,r--------,
1.4
0.2 '---------'--_...L-__----'--__----'- L..-__...L-__----'--__---'
0.5 0.6 0.8 1.2Iref(A)
1.4 1.6
F IG . 3.8 - Diagramme de bifurcat ion du Boost dans le plan (Irej , id pourI rej E [0.5, 1.6]A et Vin = 10V fixé.

3.2. Frontière fixe 71
30
25
s 20èS>
15
10
1.6
1.4
1.2
0.8
0.6iL(A)
0.4 0.6
1.2 1.4
Iref (A)
FIG. 3.9 - Diagramme de bifurcation du Boost dans l'espace (Ire! , ii. , vc) pourI re! E [0.5, 1.6]A et Vin = 10V fixé.
1.4
1.3
1.2
1.1
;;{~
0.9
0.8
0.7
0.6
0.5
1.2 1.23 1.4Iref(A)
FIG . 3.10 - Zoom de la figure 3.8 Collision fronti ère (border collision) enI re! = 1.23A .

Chapitre 3. Simulation précise des systèmes hybrides planaires72 affines par morceaux
Les résultats de simulation (domaine temporel et plan tension-courant(ve, iL)) sont donnés par le solveur serni-analytique dans le cas du convertisseur Boost contrôlé en mode courant pour les périodes IT (figure 3.11), 2T(figure 3.12), 4T (figure 3.13) et le régime chaotique (figure 3.14).

3.2. Frontière fixe 73
17 .0 .----------------------------,
16 .5 0 .0001 0.000 2
16 .0
vc (V )1 5 . 5
15 .0
1 4 .5
14 .0
13 . 5 -I----~----~---__---_----lO.Oe+OOO 4 .0e-005 S .Oe-005 1 .2e-004 1 . 6e -004 2 .0e-004
0 .0000353 0.000 13530 .70 - - - -- --------------- ----------
0 .65
0 .60iL(A)
0 .55
0 .50
0 .00020 .45
O.Oe+OOO 4 .0e-005 S .Oe-005 1. 2e -004 1 .6e-004 2 .0e-004
t(s)
(a)
0.75
0.70
0.65
i L(A)
0.60
0.55
0.50
0.45"13.5 14.0 14.5 15.0 15.5 16.0 16.5
vc (V )
(b)
FIG. 3.11 - Régime périodiq ue fondamental pour Ir e! = O.7A : (a) (haut)forme d'onde temporelle de la tension vc , (bas) forme d 'onde temporelle ducourant it. : (b) plan de phase (vc , i L) .

Chapitre 3. Simulation précise des systèmes hybrides planaires74 affines par morceaux
21
2 0 O. 004
19
18
VC(V)17
1 6
15
14
130 .0000 0 .0001 0 .0002 0 .0003 0 .0004
1. 10 .000080 5 0 .000280 4
1.0 0 .000 1096 0 .0003096-------
2T 030 .9
0 .8
iL(A)0 .7
0 .6
0 .5 . 004
0 .40 .0000 0 .0001 0 .0002 0 .0003 0 .000 4
t(s)
(a)
1.1
1.0
0.9
0.8iL(A)
0.7
0.6
0.5
0.413 14 15 16 17 18 19 20 21
vc(V)
(b)
FIG. 3.12 - Cycle d'ordre 2 pour Ir e! = l A : (a) (hau t) forme d 'onde temporelle de la tension uc , (bas) forme d'onde temporelle du courant it. : (b) plande phase (vc ,id .

3.2 . Frontière fixe 75
26
24
22
VC(V)20
18
16
14
120.0000 0.0001 0.0002 0.0003 0.0004 0.0005 0.0006 0.0007 0.0008
1.4
1.3
1.2
1.1
i (A) 1.0L 0.9
0.8
0.7 -
0.6
0.50.0000 0.0001 0.0002 0.0003 0.0004 0.0005 0.0006 0.0007 0.0008
t(s)
(a)
1.4
1.3
1.2
1.1
iL(A)1.0
0.9
0.8
0.7
0.6
0.512 14 16 18 20 22 24 26
vc(V)
(b)
F IG. 3.13 - Cycle d'ordre 4 pour I re! = 1.3A : (a) (haut) forme d'onde temporelle de la tens ion vc, (bas) forme d'onde temporelle du courant ii. : (b) plande phase (vc , iL ).

Chapitre 3. Simulation précise des systèmes hybrides planaires76 affines par morceaux
30 ...--- - - - - - - - - - - - - - - - - - - -----,
vc (V )
25
20
15
10 +-~_____,-~___._~-.___~____r-~__.__~-.___~____r-,...._____j0.0000 0.0005 0.0010 0.0015 0.0020 0.0025 0.0030 0.0035 0.0040
1.6 ...--- - - - - - - - - - - - - - - - - - - -----,
~ :~ trw--l -tr ---t -~ -- -- -- ~ -~ -- -- -- A- ~ -- -- ~--- t
1.3 IX1 I ~1.21.11.00.90.80.70.60.5 +-~_____,-~___._~-.___~____r-~__.__~-.___~____r-,...._____j
0.0000 0.0005 0.0010 0.0015 0.0020 0.0025 0.0030 0.0035 0.0040t(s)
(a)
1.6 -.---------------------------,
1.5
1.4
1.3
1.2
1.1iL(A)
1.0
0.9
0.8 _
0.7
0.6
10 15
(b)
20vc(V )
25 30
FIG . 3.14 - Régime chaotique pour Ir e! = 1.5A :(a) (haut) forme d'ondetemporelle de la tension vc, (bas) forme d'onde temporelle du courant ii. : (b)plan de phase (vc , i L)'

3.3. Frontière mobile
3.3 Frontière mobile
3.3.1 Processus général
77
On considère un système hyb ride affine par morceau x de dim ension 2 défini par l'équation (1.36) . On tient compte de deux types d 'événements: lesévénements d 'états et les événements temporels périodiques.Les événements d 'états S E i E j sont définis par la frontière oblique mobile d 'ét atsde la forme Nij .X < Èlij.t + bij , un événement survient quand l'état X(.) atteint une front ière de l'ensemble : S Ei E j = {X(t) E lR2
: Nij .X :::; Èlij .t + bij}.Notons que la surface S E i E j est ouverte.
Le problème de détection de l'occurrence d 'un événement revient à calculerle plus pet it instant st ricte ment positif t* pend ant lequel la t raj ectoire de l'ét atX(t) coupe la frontiè re mobile Bi(t) en arr ivant du plan où Ni.X < Èli.t + bi.La fonction fi (t ) = Ni.X (t ) - Èli.t - bi définit ainsi la condit ion de gardepour une front ière Bi(t ). En utilisant les expressions ana lytiques de la trajectoire données par (3.3) et (3.4) , ainsi que les expressions des exponent iellesmatricielles eA t des relations (3.5) et (3.6), on peut déterminer la fonctionf (t ) :
où les ai sont des scalaires réels.Selon les valeurs propres Pl et P2, il y a cinq cas qui déterminent les valeursdes coefficients a i comme montre le Tableau 3.3.
f( t) = al + · · · Pl E lR* Pl = 0
Pl = P2 E C*
Pl = P2 E lR*
T A B . 3.3 - Expressions de f(t) dans le cas d 'une frontière oblique, selon lesvaleurs propres Pl et P2.

Chapitre 3. Simulation précise des systèmes hybrides planaires78 affines par morceaux
.l'(t) = ...
]J2 E ~*
]J2 = 0
]JI = ]J2 E C*
]JI =]J2 E ~*
]JI E ~* ]JI = 0
02 + (Oi]JI + 05 + 05]JI t) ep If
(3.16)
TAB. 3.4 - Expressions de .l'(t) dans le cas d'une frontière oblique, suivant p,
et ]J2
Les coefficients a; dépendent des valeurs propres ]JI et ]J'l, de l'Nat X k et
des paramètres 6. i et bi de la frontière de commutation.
De même pour une frontière fixe, il existe le cas (lh = ]J2 = 0 du Ta
bleau 3.3) pour lequel les racines de la fonction f(t) peuvent être obtenus
analytiquement et le problème est résolu avec la précision de la machine.
Dans les autres cas, on a recours aux racines analytiques de la fonction
dérivée f'(t) donnée au Tableau 3.4 pour calculer un extremum de la fonction
f et retrouver ainsi la plus petite racine positive du problème général.
3.3.2 Exemple du convertisseur Buck contrôlé en mode
tension
De la même façon, le modèle hybride du convertisseur I3uck contrôlé en
mode tension est un système hybride affine par morceaux défini par les soussystèmes :
[
-1
SI: X(t) = ~?T,
S2: X(t) = [~t· • X (t) + [ \t' ].Le convertisseur Buck contrôlé en mode tension est un système hybride qui a
deux types d'événements:
Ln événement d'état défini par la frontière mobile de l'ensemble S1';11')2 :
SEj [<;2 = {X E ~2, t E ~ : iV.X(t) < 6. t + b} (3.17)
où N = [a 0], 6. = (V,,;Vz), b= a.Vrcj' + \Il + NA- I BI et les matrices A et BIsont données par :

3.3. Frontière mobile 79
Ln autre événement, périodique, qui est défini par les instants t = dPH i H j,
où dPHib'j appartient à l'ensemble
(3.18)
où T est la période du signal périodique défini par l'équation u(t) = L}. t + b.En simulant le système hybride affine par morceaux (3.16) à l'aide du
solvcur scmi-analytique on trouve les résultats (domaine temporel et plan
tension-courant (uc, iL)) suivants:Les subharrnoniques de périodes 1T, 2T et 4T sont donnés respectivementdans les figures 3.15, 3.16 et 3.17.

Chapitre 3. Simulation précise des systèmes hybrides planaires80 affines par morceaux
12.3
12.2V(t ) = II t +
L12.1
VC(V)0.0002389 0.0004 0.0008
12.0
11.9
11.S
11.7
0.0000 0.0001 0.0002 0.0003 0.0004 0.0005 0.0006 0.0007 O.OOOS
0.60 0.00080.59
0.5S
0.57
idA)0.56
0.55
0.54
0.53
0.52
0.51
0.500.0000 0.0001 0.0002 0.0003 0.0004 0.0005 0.0006 0.0007 O.OOOS
t(s)
(a)
12.14
12.12
12.10
vc(V)12.08
12.06
12.04
12.02
0.50 0.51 0.52 0.53 0.54 0.55 0.56 0.57 0.58 0.59 0.60idA)
(b)
FIG . 3.15 - Régime périodique fondamental pour Vin = 30V : (a) (haut) formed'onde temporelle de la tension Vc, (bas) forme d'onde temporelle du courantii.: (b) plan de phase (vc , iL )'

3.3. Frontière mobile 81
12.3 ....----------------------------,
12.2
12.1VC (V )
12.0
11.9
11.8
11.7 +_~-....__~-+_~-....__~-....__~-....__~-+_~-,.._~-----i
.0016
0.0000 0.0002 0.0004 0.0006 0.0008 0.0010 0.0012 0.0014 0.0016
0.00160.0014
0.0012
0.00120.00100.0008
t(S)0.0006
0.0004
0.00040.0002
0.66 ....__-----------""""""""--------------,.00 16
0.64
0.62
0.60
0.58
0.56
0.54
0.52
0.50
0.48
0.46 +-~-....__~-....__~-....__~-....__~-....__~-....__~-....__~-----1
0.0000
(a)
12.30
12.25
12.20
12.15
VC(V)12.10
12.05
12.00
11.95
11.900.46 0.48 0.50 0.52 0.54 0.56 0.58 0.60 0.62 0.64 0.66
iL(A)
(b)
FIG. 3.16 - Cycle d 'ordre 2 pour Vin = 37.5V : (a) (haut) forme d'ondetemporelle de la tension vc, (bas) forme d'onde temporelle du courant ii. : (b)plan de phase (vc , id.

Chapitre 3. Simulation précise des systèmes hybrides planaires82 affines par morceaux
12.4 -,------------------------------,
12.3
12.2
12.1VC(V)
12.0
11.9
11.8
0.0019956
OO~ ~oo .t 16J
0.0000 0.0005 0.0010 0.0015 0.0020 0.0025
0.70 -,------------------------------,
0.65
0.60
0.55idA)
0.50
0.45
0.0000 0.0005
0.0008
0.0010
t( s)
(a)
0.0016
0.0015 0.0020
0.00 4
0.0025
12.4
12.3
12.2
vc(V)12.1
12.0
11.9
11.80.40 0.45 0.50 0.~5
it,(A)
(b)
0.60 0.65 0.70
FIG. 3.17 - Cycle d'ordre 4 pour Vin = 41V : (a) (ha ut) forme d'onde temporelle de la tension uc , (bas) forme d'onde temporelle du courant it. : (b) plande phase (vc , iL) '

3.4. Conclusion
3.4 Conclusion
83
Dans ce chapitre, nous avons expliqué en detail une methode rapide et efficace pour determiner l'occurrence d'événements pour les systèmes hybridesplanaires affines par morceaux d'ordre 2. Nous avons implémenté notre algorithme dans une boîte à outils Scilab et dans une autre équivalent sur matlab, qui sera prête à être téléchargé gratuitement. Cette boîte à outils a ôtéaussi complété par des outils d'analyse des bifurcations et de visualisation dudiagramme paramétrique. L'algorithme utilisé profite de la forme analytiqueprésentée dans le cas planaire. On ne peut pas étendre notre approche pourdes dimensions supérieures à deux, car, dans ce cas l'algorithme donné dansles références IGir021 et IGir041 doit être adapté au cas des problèmes nonbornés en prenant en considération la direction des événements d'états.


Conclusion Générale etPerspectives
Récemment les systèmes dynam iques hybrides ont fait l 'objet de beaucoup d 'at tention , plu sieurs méthodes et outil s d 'aide à la modélisation et àl'analyse de ces systèmes ont été développés. Les systèmes dynamiques hybride s ont des applications dans plu sieurs disciplines comme la génétique, larobo tique et l'électronique. Ces systè mes font intervenir deux types de dynamiques différentes, des dynamiques cont inues et d 'autres discrètes, en interaction. Une sous-classe importante des systèmes hyb rides est la classe dessystèmes hybrides affines par morceaux qui ont été utilisés depuis longtempspour approximer les systèmes dynamiques non linéaires.
Le mécanisme de fonctionnement d 'un système hyb ride en général se basesur l'exist ence des événements, d 'où l'importance de la détection de l'occurrence de ces événements dans l'étude de ces systèmes. Même la simulation,qui est un outil simple pour l'analyse des systèmes hybrides , dem ande un processus précis de détection. En effet , à cause de la discontinui té des systèmeshyb rides, une erreur dans ce domaine peut entraîner un grand changement ducomporte ment global des solut ions. Différentes techniques ont été proposéespour résoudre ce problème, mais ces méthodes utili sent des approches num ériques d 'in tég ration. Ces approximations ne permet tent pas d 'assurer qu 'unévénement s'est produit réellement . Un algorithme qui a dernièrement étéfourn i dans les références [Gir02] et [Gir04] permet une meilleure détection,mais just e pour le cas d 'un polyt op e fermé.
La présente thèse présente une approche semi-ana lytique de simulati ondes systèmes hybrides affines par morceaux plans d 'ordre 2, qui se base sur lesexpressions analyt iques exactes du systè me . L' algor ithme proposé permet unedétection précise et rapide des événements d 'ét ats et des événements temporelsde type périodique, . Nous avons implémenté notre outil dans une boî te à
outil de Scilab et une aut re sous Matlab. Not re bu t est de fournir un outilde simulati on des systè mes affines par morceaux exhibant des comportementscomplexes te ls que le chaos, pour en parti culier de futures applicat ions dansle domaine des transmissions sécurisées.
Nous avons également souligné l'aspect hybride des convertisseurs d 'électronique de puiss ance . Contrairement aux modèles classiques existants(moyennisation et discréti sation), le modèle hybride permet une représentat ion fidèle sans approximation de la dynamique du circuit . Une telle mod élisation permet de développer un nouveau concept pour ét udier et analyser les

86 Conclusion Générale et Perspectives
convertisseurs DC-DC d'électronique de puissance à la lumière des systèmes
hybrides. :.'\otons que l'étude du chaos généré par ces circuits de structure
simple a attiré les chercheurs qui font de plus en plus d'efforts pour l'explorer.
Cette thèse est divisée en trois chapitres. Le premier chapitre rappelle
les concepts de base pour l'étude des systèmes non linéaires et du chaos. Ce
chapitre introduit la classe des systèmes hybrides affines par morceaux. Lnedéfinition de la bifurcation collision de frontière liée à ce type de systèmes, est
proposée dans ce chapitre. En fin de ce chapitre, nous citons les différentes
methodes numériques d'approximation des systèmes dynamiques hybrides et
nous décrivons le problématique de cette thèse. Le deuxième chapitre est dédié
aux modélisations classiques des convertisseurs DC-DC. La modélisation et la
simulation hybride des convertisseurs DC-DC est donnée au chapitre deux.
La simulation hybride numérique de deux exemples, les convertisseurs de type
Buck et Boost, est effectuée avec notre outil numérique développé sous Scicos.Xotre approche scmi-analytiquc de simulation des systèmes hybrides affines
par morceaux, est détaillée au chapitre trois.
De nombreuses perspectives s'ouvrent à l'issue de ce travail de thèse. Tout
d'abord, l'outil de simulation proposé dans cette thèse permet d'ôtudier et
d'analyser le chaos généré par les systèmes hybrides affines par morceaux
d'ordre 2, soit pour l'appliquer, par exemple, dans le domaine des transmis
sions sécurisées en profitant des avantages du chaos hybride généré, soit en
vue d'éliminer le chaos si le régime périodique est le régime de fonctionnement
désiré.1; ne deuxième piste nous conduit au domaine du contrôle du chaos, un thème
sur lequel nous avons commencé à travailler dans notre article [BouDS].
L'idée d'utiliser le chaos pour des transmissions sécurisées doit nous conduire à
faire une étude plus poussée des caractéristiques du chaos obtenu. Des études
statistiques seraient également nécessaires.
Il est possible aussi de généraliser certains aspects de notre etude à d'autres
systèmes. Cela permettra d'utiliser, selon le choix, un des systèmes chaotiques
pour une éventuelle application en sécurité des transmissions. Il faudra pour
cela sélectionner les dynamiques les plus performantes parmi celles étudiées.
Les aspects complexité des dynamiques et robustesse doivent faire partie des
caractéristiques recherchées pour les générateurs. Ces derniers seront couplés
dans des configurations simples et analysés par des outils appropriés ainsi que
par des techniques de simulation exhaustives. Le problème de la synchronisa
tion doit être également traité.
Des réalisations effectives pourraient être envisagées en utilisant des compo
sants programmables, par exemple de type FPGA (Field Programmable Gate
Array}.

ANNEXE A
Annexe des algorithmes

88
A.l
Annexe A. Annexe des algorithmes
Cas de deux valeurs propres réelles non
nulles
Rësultat : Calcul t 'si #- 0 alors
si 0: f::- 0 alors
Cl f-- ~;si Cl > l alors
ln f-- (Pl ~P2) ln(q); f f-- f(in); ddf f-- .{"(in);
si l' (0) > a & > 0 & f(O) < 0 alors
1
1.* f-- ln]);retourner t." ~
sinon si 1" (0) < 0 & f < 0 & I < 0 alors
Id f-- J-2 ci~J ;t." f-- JVelvtonmethod([t n + d: ocj};retourner r*;
sinon
1 ~:t:~rn~r r* ;fin
sinon si a < Cl < 1 alors
t-, f-- (Pl ~P2) In(e-)) ~ff--f(in);si f(O) < 0 & (0) > a alors
1 ~:t:~rner r* ;fin
sinon
oo] ) ;
1fin
f-- oc ;retourner t." ~
sinon
C2 f-- ;};
si [(C2 > 1 & 1'2 > 0) Il (0 < 0'2 < 1 & 1'2 < O)J &f(O) < 0 alors
1
t." f--~:P2
retourner t." ~
sinon
fin
1fin
t." +-- ocretourner
sinonsi 0: f::- 0 alors
c:~ f-- f;si [(C;] > 1 & Pl > 0) Il (0 < C:J < 1 & Pl < O)J &.f(0) < 0 alors
1
f-_'n(c,,):pol
retourner
sinon
1fin
f-- oc ;retourner t." ~
1fin
fin
sinonr*+--oc:retourner t." ~
Algorithme A.l : Algorithme qui calcule t* dans le cas de deux valeurs
propres réelles non nulles

A.2. Cas d'une seule valeur propre réelle non nulle (l'autre estnulle) 89
A.2 Cas d'une seule valeur propre réelle non
nulle (l'autre est nulle)
Rêsultat : Calculsi 0::3 cf- a alors
si 0'2 cf- () alors
Cl f-- ~ ~
si [(Cl > 1 & p > 0) Il (0 < c[ < 1 & p < 0)] alorsln f-- (~) ln(Cj);I f-- fCl n); ddf f-- f"(l n);
si l' (0) > a & > a & f(O) < a alors
1
1.* f-- ln]);retourner t." ~
sinon si l' (II) < Il & f < Il alors
Id f-- J-2-!J:r;
+-- .i.Vcw/;on_m_crhod([/n + a. oc]):retourner t ~ ~
sinon
1
+-- C)() ;
retourner t." ~
fin
sinon si [(Cj > 1 & p < Il) Il (II < Cj < 1 & p > Il)] alorsln f-- ln(Cj);ff-- fCl. n);
(0) > a alorsrn.cl.ho'd([lI, cc] ) ;
sinon
C2 +-_ l~(~l ;
si [(C2 > 1 & p > 0) Il (0 < C2 < 1 & p < 0)] &f(O) < a alors
1
t." f--~:1'2
retourner t." ~
sinon
fin
1fin
t." +-- oc ~
retourner
sinonsi 0::2 cf- 0 alors
c:~ +-_ l~(~l ;
si (c:J > 0) &f(O) > a alors
1
1.* f-- C:J;retourner t." ~
sinon
fin
1fin
t." f-- oc :retourner
Algorithme A.2 : Algorithme qui calcule t* dans le cas d'une seulevaleur propre réelle non nulle (l'autre est nulle)

90 Annexe A. Annexe des algorithmes
A.3 Cas de deux valeurs propres réelles égales
Rësultat : Calcul t '
si œt cf- 0 alorssi 0::2 cf- 0 alors
Cl f-- -P,;;t;~~n2
si Cl > 0 alors
mcl.hooé([O.lnJ) ;
: ddf i-- i" (t n ) ;< 0 alors
t-, +-- Col ;
si l' (0) > 0
1
1.* i-- D'ich.ol.o m.ieretourner t." ~
rncl.hod([/ n + a. =J):
sinon si 1" (0) < 0 & f < 0 & I < 0 alors
Id i-- J-2 ci~J :
f-- .i.Vcwl;onretourner t ~ ~
sinon
1
f-- C)() ;
retourner t." ~
fin
1sinon
1 ~:t::-rn:rfin
> 0 alors
ton_",ElI'wd([O. =J);
sinon
C2 f-- .L:
si [(C2 > 1 & p > 0) Il (0 < C2 < 1 & p < 0)] & f(O) < 0 alors
1
t." i--~:
retourne: t." ~
fin
sinon
si 0'2 cf- () alors
t" i-- ~/ :f i-- fCtn);
si p < 0 alorssiI'(O»O&
1
1.* i-- D'ich.ol.o m.ieretourner t." ~
< () alorsmcl.hooé([O.lnJ) ;
sinon si f' (0) < 0 & f
1
ddfi--f"(tn):di--
i-- m.cl.hc1d([/nretourner t." ~
sinon
1
f-- C)() ;
retourner t." ~
fin
sinon
si l' (0) > 0 & < 0 alors
1
1.* i-- mcl:hol/([O,=J) ;retourner t."
sinon
1fin
t." +-- C)()
retourner r*;
fin
1fin
sinonr*+--oc:retourner t." ~
fin
Algorithme A.3 : Algorithme qui calcule t* dans le cas de deux valeurs
propres réelles égales

A.4. Cas de deux valeurs propres nulles 91
A.4 Cas de deux valeurs propres nulles
1
fin
Résultat: Calcul l."
si al cF 0 alorssi ~ = 0 alors
t-. +- ;::'-~ ;si t-. > 0 alors
1
l* +-- l'n;retourner t*;
sinoni: +-- De ;
retourner t*;
sinon si ~ > 0 alors-U2+VZ
{'IL 1 +--- 2rq ;
-U2-VZf'n2 +--- 2rq ;
('rTI.in, = min(lnl, f'n2);
t m a x = rnax(tnl, t n '2 ) ;si tTwin > 0 alors
1
t* +--- tTwin ;
retourner l *
sinon si trnaJ..: > ü alors
1
t* +--- t m a x ;
retourner l *sinon
1
l* +-- De ;
retourner t*;fin
sinon
1
fin
t" +-- 00 ;
retourner t* ;
sinon
si a2 cF 0 alors
f'T"+-~;
si t-. > 0 alors
1
t* +-- t n ;
retourner l * ;
sinont* +--- x ;retourner l * ;
fin
sinont" +-- 00 ;
retourner l * ;fin
fin
Algorithme A.4 Algorithme qui calcule t* dans le cas de deux valeurs
propres nulles

92
A.5
Annexe A. Annexe des algorithmes
Cas de deux valeurs propres complexes
Rêsultat : Calculsi He > a alors
si 1= () alors1 f-- "'-"0;
sinon
7'T"8 f-- [Inl In(1 . f I)J 1He p Slll(tp !Pd) ;:-;
n."; f-- il'ns l ~
si T"s > "'-"0 + 2 alors1 T" f-- T"s - 1;
sinon1 T" f-- "'-"0;
finfin
sinon si IlE < 0 alorsf-- no;
i.;»; f-
YJn i n f--tr qu:,-_ n
finsi 0 alors
1 CXJ:
sinon
+ (n + ±);r);
'"maœ+-- +Cn+~)7r);Ym a ", f-- ):
si (Ymax < 0) alorsT" f-- T" +lm.",,, f-- + (n + ~);r);Y rn a x f-- );
si a alors1 ClO:
finfin
finsinon
si Ipsin(:p - :Pd)1 < Ifl alors1 f-- 00:
sinon1 f-- "'-"0;
finfinsi = oc alors
r* f-- oc;retourner t*:
sinon
tmin f-- rn a.xf G, I;n (:Pd + (n + ~)1T))~v;«; f-- ):
tant que 0) faire
1
tm7: 2- rn a.xf G, + (n + ~ )1T))~Ym.in f-
fin
'"maa: f-- + (n + ~)7r);Ym a ,,, f-- ):
sil (Yma:,-~ ,?)+alorsI m a. ,,, f-- + (n + ~);r):Y m a œ f-- );
fint." f-- l rich.ot ornie method([tmin' trT!.rJ,:r:]);retourner
fin
Algorithme A.5 Algorithme qui calcule t* dans le cas de deux valeurspropres complexes

Bibliographie
[Acc03] P. Acco. Etude de la boucle à nerrouillaqe de phase par impulsionsde charge : Prise en compte des aspects hybrides. Thèse de doctorat, Institut National des Sciences Appliquées de Tou louse, France,Décembre 2003. 53
[Ban OO] S. BANER.JEE. « Bifu rcations in two-dimensional piecewise smooth.maps-theo ry and applications in switching circuits. » IEEE Trans. onCircuits and Systems-l, Vol. 47, pp. 633-647, 2000. 3
[Bou07] H. BOUZAHIR, F . EL GUEZAR & T . UETA. « Scicos simulation of ahybrid dynamical system. » Dans Pmceedings of the 15th IEEE International Workshop on Nonlinear Dynamics of Electronic Systems,pp . 62-65. Tokushima, Japan, 2007. 53
[Bou08] H. BOUZAHIR, F. El GUEZAR, A. El AROUDI & T . UETA. « Partialtime delayed feedback control of chaos in a hybrid model of a de-deconverter. » Dans Pmceedings of the IEEE International Symposiumon Communication, Control and Signal Processinq, pp. 158-161. St .J ulians, Malta, March 2008. 86
[Bra94] M. S. BRANICKY, V. S. BORKAR & S. K. MITTER. « A unified framework for hybrid control. » Dans Pree . of the ss» IEEE Conferenceon Decision and Control, pp. 4228-4234. 1994. 25
[Bra95a] M. S. BRANICKY. Studies in hybrid systems: Modeling, Analysis,and control . Thèse de doctorat, Massachusetts Institute of technologies, Boston , USA, 1995. 25
[Bra95b] M. S. BRANICKY, V. S. BORKAR & S. K. MITTER . « A unified framework for hybrid control: model and optimal control theory. » Vol. 43,no. 1, pp. 31-45, 1995. 25
[Bro84 ] R. VV. BROCKETT & J . R. VVOOD. « Understanding power converterchaotic behavior mechanisms in protective and abnormal modes. » pp.E-14. Proceedings of POvVERCO N 11, 1984. 3
[Chu92] L. O. CHUA. « The genesis of chua's circuit. » Archie [iir Elektronikund Überiraqunçs technik, Vol. 46, no . 4, pp . 250-257, 1992. 2
[Chu94] L. O. CHUA. « Chua's circuit 10 years later. » International Journalof Circuit Theoru and Applications, Vol. 22, no. 4, pp. 279-305, J uly1994. 2
[Chu99] A. CHUTINAN & B. H. KROGH. « Verification of polyhedral-invarianthybrid automata using polygonal flow pipe approximations. » pp. 76-90.Springer, 1999. 28

94 Bibliographie
[Dan98] T. DA.\'G & O. :.vIALER. « Reachability analysis via face lifting. »Dans HSCC, pp. 96 109. 1998. 28
IDea901 J. H. B. DEA.\'E & D. C. HAMILL. « Instability, subharmonics, andchaos in power electronic systems. » IEEE Trans. Power Electrouics,Vol. 5, pp. 260 268, 1990. 3
IDog941 M. DOGRL"EL & t. OZGUNER. « Stability of hybrid systems. » Dans
IEEE International Symposium on Intelligent Control; pp. 129-134.
1994. 25
leAOOal A. EL AROL"DI. Study of Nonlinear Phenomene and (JuasiperiodicityRoute to Chaos in PWM DC/DC Conoerters. Thèse de doctorat,
Lniversitat Politéc:nic:a de Catalunya, Spain, February 2000. 3
leAOObl A. EL AROUDI, L. BE.\'ADERO, E. TORIBIO & S. :.vIACHICHE. « Quasiperiodicty and chaos in the dc-dc buck-boost converter.» Interna
tional Journal of Bifurcation and Chaos, Vol. 10, pp. 359-371, 2000.
3
leAOlI A. EL AROUDI & R. LEYVA. « Quasi-periodic route to chaos in a pwmvoltage-controlled dc-dc boost converter.» IEEE Trans. on Circuits
and Systems, Vol. 48, no. 8, pp. 967 978, 2001. 3
leA051 A. EL AROL"DI, M. DEBBAT, R. Gm.AL, G. OLIVAR, L. BENADERO
& E. TORIBIO. « Bifurcations in dc-dc switching converters : reviewof methods and applications.» International Journal of Bifurcation
and Chaos, Vol. 5, pp. 1549 1578, 2005. 2
leG08al F. EL GUEZAR, P. Acco, H. BOUZAHIR & D. FOL"RNIER
PRL".\'ARET. « Accurate and fast event detection occurrence in planarpiecewise affine hybrid systems. » Dans Proceediriqs of the International Symposium NOLTA (NOn Luiear Theoru and iis Applications),
pp. 341-344. Budapest, Hungary, Scptcmbcr 2008. 54
[eG08b] F. EL GL"EZAR & H. I30L"ZAHIR. « Chaotic behavior in a switcheddynamical system.» Modelling and Simulation in Engineering, Vol.
2008, p. 6, 2008. 53
IEspOlI J. M. ESPOSITO, V. KLVIAR & G. J. PAPEi\S. « Accurate event detection for simulating hybrid systems.» Dans In Hubrid Systems :Computation and Control, LNCS 2084, pp. 204 217. Springer
Verlag, 2001. 29
[Fei80] M. FEIGENI3ALVI. « Universal behaviour in nonlinear systems.» LosAlamos Science, Novernber 1980. 1
IGir021 A. GIRARD. « Detection of event occurrence in piecewise linear hybridsystems. » Dans Proceedinqs of the 4th International Conference on

Bibliographie 95
Recent Adcances in Soft Computuiq, pp. 19 25. Nottingham, United
Kingdom, December 2002. 30, 52, 83, 85
[Gir04] A. GIRARD. Analyse algorithmique des systèmes hybrides. Thèse de
doctorat, Insti tu t :.'\ational Polytechnique, Grenoble, France, Sep
tembre 2004. 30, 52, 83, 85
[Ham88] D. C. HAMILL & D. J. JEFFRIES. « Subharmonics and chaos in a
controlled switched-mode power converter.» IEEE Trans. Circuits
Systs. t, Vol. 35, no. 8, pp. 1059-1060, 1988. 3
IHed971 C. D. HEDAYAT, A. HACHEM, Y. LEDUC & G. BENBASSAT. « High
level modeling applied to the second-order charge-pump pli circuit. »
Modelling and Simulation in Engineering, Vol. 14, no. 2, :.vIarch
April 1997. 53
[Kas91] J. G. KASSAKIAN, M. F. SCHLECHT & G. C. VERGHESE. Principles
of Power Electronics. Addison-Wesley, 1991. 32
[Kow97] S. KOWALEWSKI, :.vI. FRITz, H. GRAF, S. SIMO.\', O. STURSI3ERG
& H. TRESELER. « A case study in tool-aided analysis of discretely
controlled continuous systems: the two tanks problem.» Dans In
Hybrid Systems V, pp. 163-185. Springcr-Verlag, 1997. 28
ILem931 M. D. LE:.YIMO.\', J. A. STIVER & P. J. A.\'TSAKLIS. Hybrid systems,
chapitre Event identification and intelligent hybrid control, pp. 317
356. Springer Verlag, 1993. 25
ILen961 B. LE.\'.\'ARTSO.\', M. TITTL"S, B. EGAIWT & S. PETTERSSON.
« Hybrid systems in process control.» Control Systems Magazine,
Vol. 16, no. 5, pp. 45 55, 1996. 25
[Li75] T.-Y. LI & J. A. YORKE. « Period three implies chaos. » AmericanMathematical MontiLly, Vol. 82, pp. 985 992, 1975. 1
[Liu88] K. H. LIU & F. C. LEE. « Topological constraints. on basic pwm
converters.» Dans IEEE Power Electrotiics Specialists Conference
Record, pp. 164-172. 1988. 14
[Lor'63] E. N. LORE.\'Z. « Deterministic nonperiodic f1ow.» Journal of the
Atmospheric Sciences, Vol. 20, March 1963. 1
[:.vlan82] 13. 13. J\!IANDELI3ROT. The Fractal Geometre of Nature. San Fran
cisco : Frccman, 1982. 2
[:.vlay76] R. M. :.vIAY. « Simple mathematical models with very complicated
dynamics. » Nature, June 1976. 1
I:.vIid761 R. D. :.vIIDDLEBROOK & S. CL"K. « A general unified approach to
modeling. switching converter power stages. » Dans IEEE Power Elec
ironies Specialisis Conference Record, pp. 18-34. 1976. 17

96 Bibliographie
[:.vIir96a] C. MIRA. « About two dimensional piecewise continuous noninvertiblemaps.» International Journal of Bifurcation and Chaos, Vol. 6,
no. 5, pp. 893-918, 1996. 10
I:.vIir96bl c. Mm.A, L. GAImINI, A. BUGOLA & J.-C. CATHALA. « Chaoticdynamics in two-dimensional noninvertible maps.» WoTld Scieniific,1996. 10
[:.vIir96c:] C. MIRA, L. GARDINI, A. DUGOLA & ,J.-C. CATHALA. « Chaoticdynamics in two-dimensional noninvertible maps.» World ScientijicSeries on Nonlinear Science Serie A, Vol. 20, 1996. 10
I:.vIit001 1. MITCHELL & C. TO:.YILIN. « Level set methods for computation inhybrid systems. » Dans HSCC, pp. 310-323. 2000.
"CIlL citeseer. ist .psu. edu/mitchellOOlevel. html 28
[:.vIos99] P. J. :.vIOSTERMA.\'. « An overview of hybrid simulation phenomenaand their support by simulation packages.» Dans Hybrid Systems:Computation and Control (HSCC'99j, pp. 165 177. 1999. 28
[Ner93] A. :."JERODE & \V. KOHN. Theory of hybrid systems, pp. 317 356.
Springcr Verlag, 1993. 25
IPae941 M. Van PAE:.YIEL. « Analysis of a charge-pump pli: a new model. »IEEE Transactions on Communications, Vol. 42, no. 7, July 1994.
53
[Par96] T. PARK & P. 1. DARTON. « State event location in differentialalgebraic models.» ACM Trans. ModeZ. Comput. Sitnul., Vol. 6,
no. 2, pp. 137-165, 1996. 29
IPcl88! P. PELETIES & Il. DECARLO. « Modeling of interacting continuoustime and discrete event systems: An example.» Dans 36th Annual
Allertoti Conference on Communication, Control and Computinq,pp. 1150 1159. 1988. 25
[Pe189] P. PELETIES & R. DECARLo. « A modeling strategy with event structures for hybrid systems. » Dans Proc. of the 28th IEEE Conferenceon Decision and Control, pp. 1308-1313. Tampa, Floride, 1989. 25
IPcl93! P. PELETIES & Il. DECARLO. A Modeling Strategy for Hybrid Systems Based on Event Structures, pp. 39-69. 1993. 25
[Pet95] S. PETTERSSON & D. LE.\'.\'ARTSO.\'. « Hybrid modelling focused onhybrid petri nets.» Dans 2n d European ioorkshop on real iime andhybrid systems, pp. 303 309. Grenoble, 1995. 25
IPet99! S. PETTERSSO.\'. Analysis and design of hybrid systems. Thèse de
doctorat, Chalrncrs university of tcchnology, Côteborg, Suède, 1999.
25

Bibliographie 97
[Rue71] D. ReELLE & F. TAKE.\'S. « On the nature of turbulence.» Math.Phys., Vol. 20, pp. 167 192, 1971. 1
[Sen03] M. SENESKY, G. EIREA & T. John Koo. « A unified frameworkfor hybrid control: model and optimal control theory. » Vol. 2623, pp.
450 465, 2003. 32
[Sev85] R. P. SEVER.\'S & G. I3LOCLVI. Modern DC-DC Sunich-tnotle PowerConversion Circuits. New York: Van Nostrand Reinhold Co., 1985.
14
[Sha87] 1. F. SHAMPI.\'E, 1. GLADWELL & R. \V. I3RANKIN. « Reliable solution of special event location prablems for odes.» A CM transactions
on Maihemaiical Software, Vol. 17, pp. 11-25, 1987. 29
[Sti92] J. A. STIVER & P. J. ANTSAKLIS. « Modeling and analysis of hybrid control systems.» Dans Proc. of the sr' IEEE Conference onDecision and Control, pp. 3748-3751. Tucson, Arizona, 1992. 25
[Str94] S. H. STROGATZ. Nonlinear dimamics and chaos: with applications
to plujsics, biology, chemistrsj, and enginœr'i'ng. Addison-Wesley,1994. 1
ITav871 1. TAVERNINI. « Differentiai automata and their discrete simulators. »Vol. 11, no. 6, pp. 665-683, 1987. 25
[Tse94a] C. K. TSE. « Chaos fram a buck switching regulator operating indiscontinuous mode.» International Journal of Circuit Theoru andApplication, Vol. 22, pp. 262-278, 1994. 3
ITse94bl C. K. TSE. « Flip bifurcation and chaos in three-state boost switchingregulators. » IEEE Transactions on Circuits and Systems I : Theoryand Applications, January 1994. 3
ITse031 C.K. TSE. Complei Beluunor of Switching Power Conoerters. Boca
Raton: CRC Press, 2003. 12, 13, 53
IvdP271 B. VAN DER POL & J. VA.\' DER MARK. « Frequency demultiplication. » Nature, Vol. 120, pp. 363-364, September 1927. 2
I\Vin801 T. VVINFIŒE. The qeomeiri] of biological iime. New York: SpringcrVerlag, 1980. 2
[\Vit66] H. S. VVITSENHAL"SE.\'. « A c1ass of hybrid-state continuous-timedynamic systems. » IEEE Transaction on auiomaiic control. Vol. 11,
no. 2, pp. 161-167, 1966. 25
IYua981 G. H. YUAN, S. BA.\'ETUEE, E. OTT & J. A. YC)TI.KE. « Bordercollision bifurcations in the buck converter. » IEEE Trans. on Circuitsand Systems-l, Vol. 45, pp. 707-715, 1998. 3

98 Bibliographie
[Zay01] J. ZAYTOON. Systèmes dynamiques hybrides. Collection Hermès
Paris, France, 2001. 28

Résumé:Les systèmes hybrides affines par morceaux forment une classe importante
et simple de systèmes dynamiques hybrides. Il s'agit d'un ensemble fini de
sous-systèmes affines associés à une ou plusieurs lois de commutations quidéfinissent à chaque instant le système affine actif. Ces systèmes sont non
linéaires et peuvent présenter une variété de phénomènes complexes liés à des
bifurcations et au chaos. On s'intéresse à plusieurs exemples en électronique
de puissance : des convertisseurs de type DC-DC. La modélisation de cesconvertisseurs est donnée par des modèles classiques approchés ou discrétisés.
Ces circuits peuvent egalement être analysés en utilisant des modèles hybrides.
Le comportement des systèmes hybrides se base sur l'existence d'événements.
La simulation qui est un outil simple d'analyse de ces systèmes demande un
algorithme qui donne les dates exactes de commutations. Les techniques de
detection qui existent se basent essentiellement sur des approximations et
elles peuvent omettre certains evenements et par suite générer des trajectoires
qui divergent radicalement de la trajectoire réelle du système hybride simulé.
:.'\otre objectif à travers cette thèse, est de fournir un outil rapide et précis de
simulation des systèmes hybrides plans affines par morceaux d'ordre 2. Xotre
approche scmi-analytique utilise l'expression analytique des solutions et
donne les instants de commutations des evenements dètats et des evenements
temporels de type périodique. Notre algorithme est implémenté en une boîte
à outil sous Sciees et sous Matlab.
Mots clés : Chaos, système hybride, système affine par morceaux, dynamique non linéaire, Scicos, Scilab, Matlab, simulationscrni-analytiquc, convertisseur Boost, convertisseur Buck, stabilité,cycle limite, bifurcation.

Modeling and Simulation of Piecewise Affine HybridSystems.
Examples in Power Electronics.
Abstract : Picccwise affine hybrid systems arc an important and simpleclass of hybrid dynarnical systems. A piecewise affine systern is cornposed ofseveral dynarnical affine subsysterns and of switching rules that decide thebchavior of the active subsystcrn during cach switching intcrval. Rcccntly, ithas bccn shown that this class of systems is very rich in nonlincar phcnomcnasuch as bifurcations and chaos. Picccwise affine hybrid systems arise in manyengineering applications such as DC-DC converters. Modeling of such couverters is given using c:lassical averaged or discrete rnodels. However, a possibleapproach to analyzc thcsc circuits can be donc using hybrid rnodcls.
The bchavior of a hybrid system is bascd on events' existence. Simulationwhich is a simple tool to analyzc thesc systems, rcquires an algorithm thatgives exact switched dates. Existing detection techniques, that are essentiallybased on approxirnated schernes, rnay lose sorne events and then divergedrastically from the l'cal trajectory of the simulatcd hybrid system. Our aimwithin this thcsis is to provide a fast and accuratc simulation tool of 2nd ordcrplanar picccwise hybrid systems, which is bascd on analytical expressions ofsolutions. Our serni-analytic approach gives switching instants of state eventand periodic temporal events. Our algorithrn is implernented in a Scicostoolbox, anothcr alternative in Matlab is also availablc.
Key words : Chaos, hybrid system, piecewise linear system, nonlinear dyriamics, Sciees, Scilab, Matlab, scmi-analytical simulation,Beost converter, Buck converter, stability, limit cycle, bifurcation.