Embed Size (px)
Citation preview

Outils numériques
225
Partie IV
SIMULATIONS NUMÉRIQUES
Outils numériques
226
Chapitre VIII
Simulations numériques des essais sous chargement simple
Outils numériques
227
Table des matières I. OUTILS NUMÉRIQUES........................................................................................................................ 228
I.1. INTRODUCTION...................................................................................................................................... 228 I.2. DESCRIPTION DU CODE DE CALCUL FLAC............................................................................................. 228
I.2.1. Les différences finies. .................................................................................................................. 228 I.2.2. Schéma de résolution explicite. ................................................................................................... 228 I.2.3. Equations générales .................................................................................................................... 229 I.2.4. Passage du problème continu à la discrétisation........................................................................ 230 I.2.5. Elément d’interface ..................................................................................................................... 231
II. SIMULATION NUMÉRIQUE DES ESSAIS SOUS CHARGEMENT SIMPLE ............................. 233
II.1. ESSAI BIAXIAL .................................................................................................................................. 233 II.1.1. Maillage utilisé et Interface ........................................................................................................ 233 II.1.2. Paramètres du modèle MMC ...................................................................................................... 233 II.1.3. Contraintes initiales .................................................................................................................... 234 II.1.4. Simulation de l’essai de compression isotrope............................................................................ 234 II.1.5. Application du déviateur ............................................................................................................. 234 II.1.6. Résultats des essais biaxiaux....................................................................................................... 235
II.2. ESSAIS OEDOMÉTRIQUES .................................................................................................................. 238 II.3. VALIDATION DU MODÈLE SUR DES ESSAIS RÉALISÉS SUR LE MATÉRIAU ANALOGIQUE PAR D’AUTRES CHERCHEURS................................................................................................................................................... 239
III. INFLUENCE DES PARAMÈTRES DU MODÈLE MMC SUR LA SIMULATION DES ESSAIS D’IDENTIFICATION ...................................................................................................................................... 241
III.1. PARAMÈTRES ÉLASTIQUES................................................................................................................ 242 III.2. PARAMÈTRES À LA RUPTURE............................................................................................................. 243 III.3. SYNTHÈSE DES RÉSULTATS ............................................................................................................... 245
IV. CONCLUSIONS...................................................................................................................................... 246
Outils numériques
228
I. Outils numériques
I.1. Introduction La modélisation numérique des géomatériaux est une étape indispensable pour le dimensionnement des ouvrages. Ces méthodes numériques fournissent les champs de déformation et des contraintes ainsi que les mécanismes de rupture. Le code de calcul FLAC2D utilisé dans nos modélisations est basé sur la méthode des différences finies. Les créateurs de ce code ont utilisé un concept appelé «méthode des éléments Lagrangiens». Il consiste en une application non traditionnelle de la méthode des différences finis explicites. (Billaux [1993]). Une courte description de cette méthode et du logiciel FLAC2D est présentée au début de ce chapitre. La loi élastoplastique, nommée MMC, développée au cours de ce travail de thèse à été implantée dans le code de calcul FLAC2D. Par la suite, toutes les simulations numériques présentées seront effectuées avec cette loi.
I.2. Description du code de calcul FLAC.
I.2.1. Les différences finies. La méthode de différences finies est l’une des plus anciennes méthodes de résolution numérique d’un système d’équations différentielles avec conditions initiales et, conditions aux limites (Desai & Christian [1977]). La plupart des méthodes utilisant cette technique adoptent une discrétisation du milieu en mailles rectangulaires exclusivement. L’approche en différences finies utilisée dans Flac est basée sur la méthode de Wilkins [1964] et permet de formuler les équations des différences finies pour des éléments de forme quelconque. On peut donner n’importe quelle forme aux limites et, faire varier les propriétés d’un élément à l’autre. De ce point de vue elle est donc aussi performante que la méthode des éléments finis, avec des éléments triangulaires à 3 nœuds. Dans la méthode des différences finies, toute dérivée présente dans le système d’équations est directement remplacée par une expression algébrique écrite en termes de variations en des lieux discrets de l’espace. Ces variables sont indéterminées partout ailleurs, contrairement aux éléments finis pour lesquels des fonctions de forme décrivent les variations (contraintes et déplacements) dans tout le massif.
I.2.2. Schéma de résolution explicite. La présentation de la méthode de résolution implantée à l’intérieur du code est limitée à son mode de fonctionnement. Le lecteur intéressé peut se reporter à Marti & Cundall [1982] qui décrit la procédure en détails. Basé sur le fait que dans la réalité, une partie de l’énergie de déformation accumulée par le système est convertie en énergie cinétique qui va se propager et se dissiper dans le matériau environnant, le schéma de résolution explicite intègre ce phénomène en prenant en compte les équations dynamiques du mouvement. Le déséquilibre induit en une zone va se propager dans l’ensemble du massif. L’objectif de la méthode aux éléments lagrangiens n’en reste pas moins la résolution d’un problème statique ou quasi-statique par l’intermédiaire de la dynamique.
Outils numériques
229
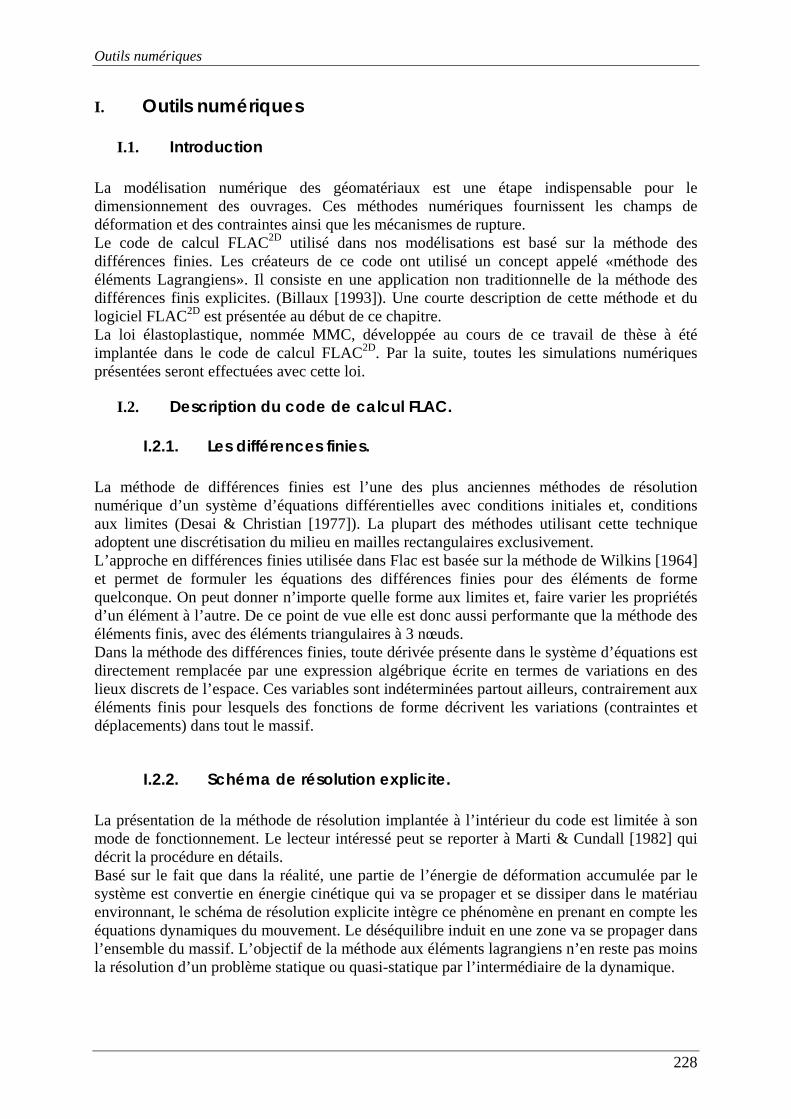
Le mode incrémental de résolution du système assure la stabilité du schéma numérique puisque, même si le système est instable à certains instants les chemins de contraintes et de déformations sont respectées à chaque pas. La Figure 1 illustre la séquence de calcul utilisée.
Figure 1: Séquence de calcul générale (Billaux [1993]).
Le principe fondamental de la résolution explicite est que chaque boîte de la Figure 1 remet à jour toutes les variables qu’elle doit traiter à partir de valeurs connues et qui restent fixées durant les calculs dans l’autre boîte. La procédure de résolution explicite n’étant pas inconditionnellement stable, il est nécessaire que la vitesse du front de calcul soit plus grande que la vitesse maximale de propagation de l’information, pour cela le choix du pas de temps est important en effet il doit être plus petit qu’un certain pas de temps critique (Billaux [1993]). Le critère de convergence pour contrôler la fin des cycles de calcul est simplement basé sur l’état d’équilibre de l’ensemble des éléments. Le programme teste pour chacun des éléments le déséquilibre de force et retient la force maximale non équilibrée. L’utilisateur définit la force en dessous de laquelle la convergence est supposée suffisante. Ainsi formulée, la méthode de résolution implémentée dans FLAC présente des avantages et des inconvénients si on tente de la comparer à d’autres méthodes bien connues telle que la méthode implicite généralement utilisée en éléments finis.
I.2.3. Equations générales L’équation du mouvement de Newton est exprimée par l’équation différentielle suivante :
ij
iji gxt
u ρσ
ρ +∂
∂=
∂∂ &
Avec : ρ la masse volumique t le temps u& le vecteur vitesse x le vecteur position g accélération due aux forces de volume
Les taux de déformations ije& sont ensuite déduits et la loi de comportement du matériau est utilisée pour calculer de nouvelles contraintes et forces déduites des taux de déformation, chaque séquence de calcul formant ainsi un cycle de calcul. Les taux de déformations incrémentales :

Outils numériques
230
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+∂∂
=i
j
j
iij x
uxue
&&&
21
( )K,e,f pn &σ=σ
Avec : nσ Contraintes nouvelles
pσ Contraintes au cycle de calcul précédent K Paramètre d’écrouissage
iju& déplacements incrémentaux xij les axes
I.2.4. Passage du problème continu à la discrétisation. Le milieu continu est discrétisé par des quadrilatères, chacun d’eux étant divisé en deux paires d’éléments triangulaires (a et b, c et d) à déformation uniforme comme indiqué sur la Figure 2. La force exercée sur un nœud est prise comme la moyenne des forces pour les deux paires de triangles, ce qui permet d’assurer une réponse symétrique à un chargement symétrique.
Quadrilatères superposés. Vecteurs vitesse. Vecteur force nodale.
Figure 2: Discrétisation mixte. Les équations aux différences finies sont déduites du théorème de divergence de Gauss :
Adxfdsfn
A iSi ∫∫ ∂
∂=
Où : s périmètre de l’élément de surface A. n vecteur unitaire normal à s. f scalaire, vecteur ou tenseur défini sur A et son périmètre.
La valeur moyenne du gradient de f sur A ix
f∂∂ , est calculée en fonction des valeurs de f sur
le périmètre s :
∫=∂∂
Si
i
dsfnAx
f 1
Appliquée à un élément triangulaire, cette relation devient :

Outils numériques
231
∑ ∆=∂∂
Si
i
snfAx
f 1
où : La sommation s’applique aux trois côtés du triangle.
f valeur moyenne de f sur un côté s∆ longueur du côté
L’équation suivante permet d’écrire le tenseur taux de déformation e& en fonction des vitesses aux nœuds :
( ) ( )( ) snuuAx
uj
S
bi
ai
j
i ∆+≅∂∂ ∑ &&&
21
Où a et b sont les nœuds extrémités d’un côté du triangle. L’utilisation d’éléments triangulaires élimine le problème de déformations non restreintes qui se pose avec les éléments quadrilatères à déformation uniforme. Ce problème, pour les polygones à plus de trois sommets, tient au fait qu’il existe des combinaisons de déplacements nodaux qui ne produisent aucune déformation, et donc ne sont restreints par aucune force. Un autre problème de la modélisation de matériaux en plasticité n’est pas résolu par l’utilisation d’éléments triangulaires : il s’agit de la formulation de la condition d’incompressibilité lors de l’écoulement plastique.
I.2.5. Elément d’interface Les éléments d’interface sont utilisés pour représenter de manière simplifiée le comportement des zones de localisation des déformations soit en cisaillement (surface de glissement) soit en traction (fissures).
Figure 3: Détail des composants d’un élément d’interface (Itasca [1994]).
Pour les caractéristiques de frottement, cohésion, dilatance et traction limite, on prend généralement celles du matériau le moins résistant, éventuellement réduites en cas d’interface « lisse » (frottement sol/acier par exemple). Les raideurs kn et ks sont plus difficiles à estimer. Afin de simuler le comportement rigide plastique dans un premier temps, nous avons retenu les valeurs recommandées par les auteurs de FLAC consistant à prendre kn et ks dix fois plus
Outils numériques
232
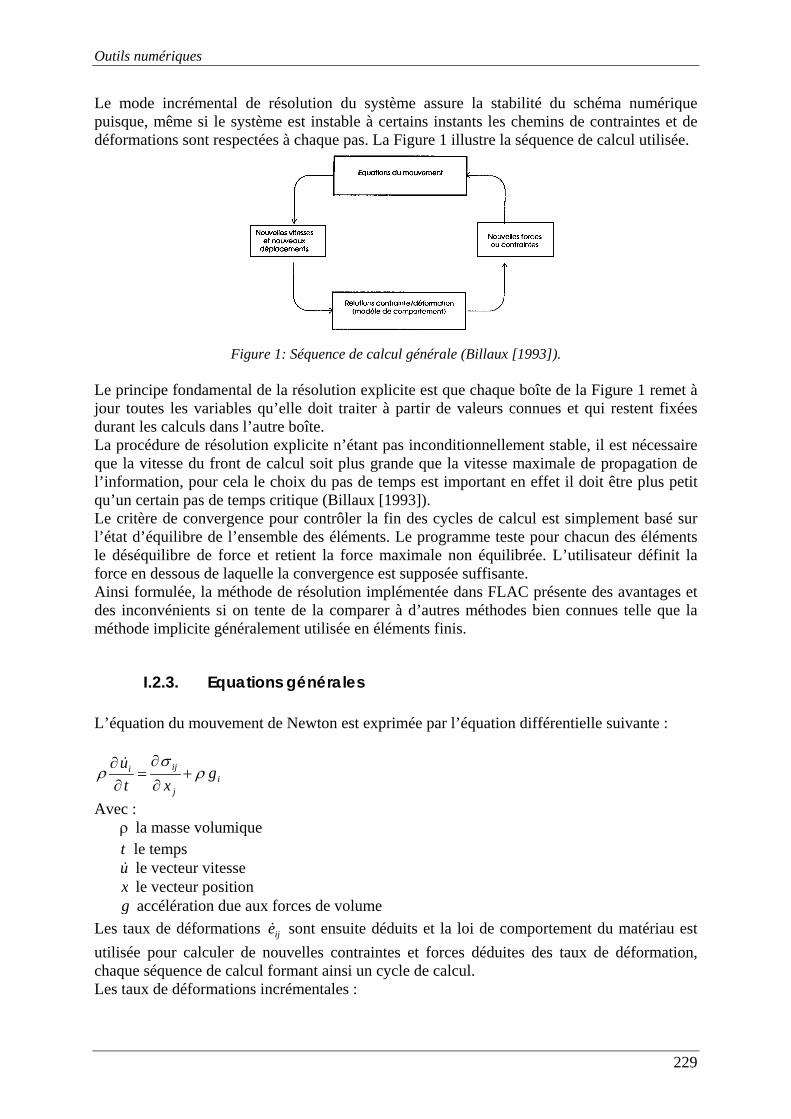
élevées que la raideur équivalente de la zone voisine la plus raide. La raideur apparente de ladite zone dans la direction normale étant donnée par la relation suivante :
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∆
⎟⎠⎞
⎜⎝⎛ +
min
34
maxz
GK
Avec minz∆ la plus petite dimension de la zone contigue dans la direction normale (voir Figure 4.)
Figure 4: Dimension de la zone utilisée pour le calcul des raideurs (Itasca [1994]).
Les tests ont permis de montrer la sensibilité assez faible sur les résultats de ces deux paramètres. Cette recommandation permet de ne pas pénaliser les temps de calcul lors de la prise en compte d’une interface.
Simulation numérique des essais sous chargement simple
233
II. Simulation numérique des essais sous chargement simple Dans cette partie nous présentons une étude de simulation numérique des essais biaxiaux et oedométriques avec la loi MMC à l’aide du logiciel FLAC2D. Les simulations numériques seront effectuées avec les paramètres déterminés à partir des méthodes présentées dans le chapitre précédent.
II.1. Essai biaxial Afin de simuler les essais biaxiaux nous avons décidé de reproduire numériquement toutes les phases expérimentales effectuées.
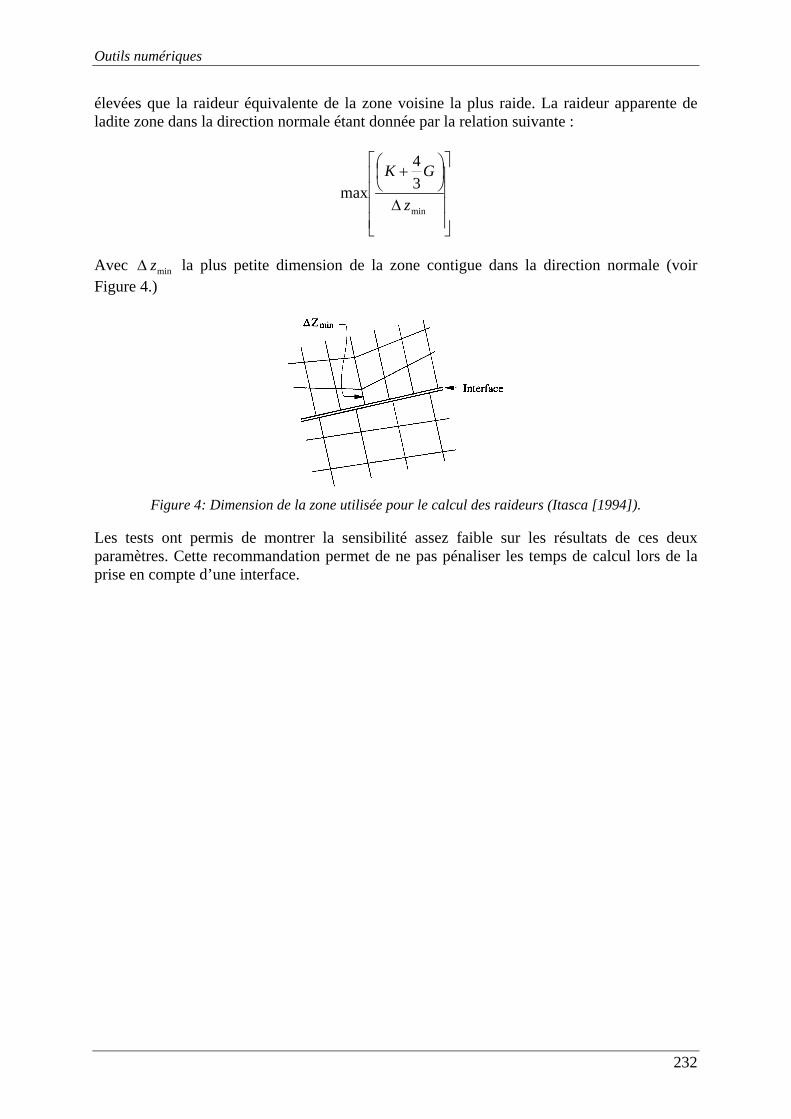
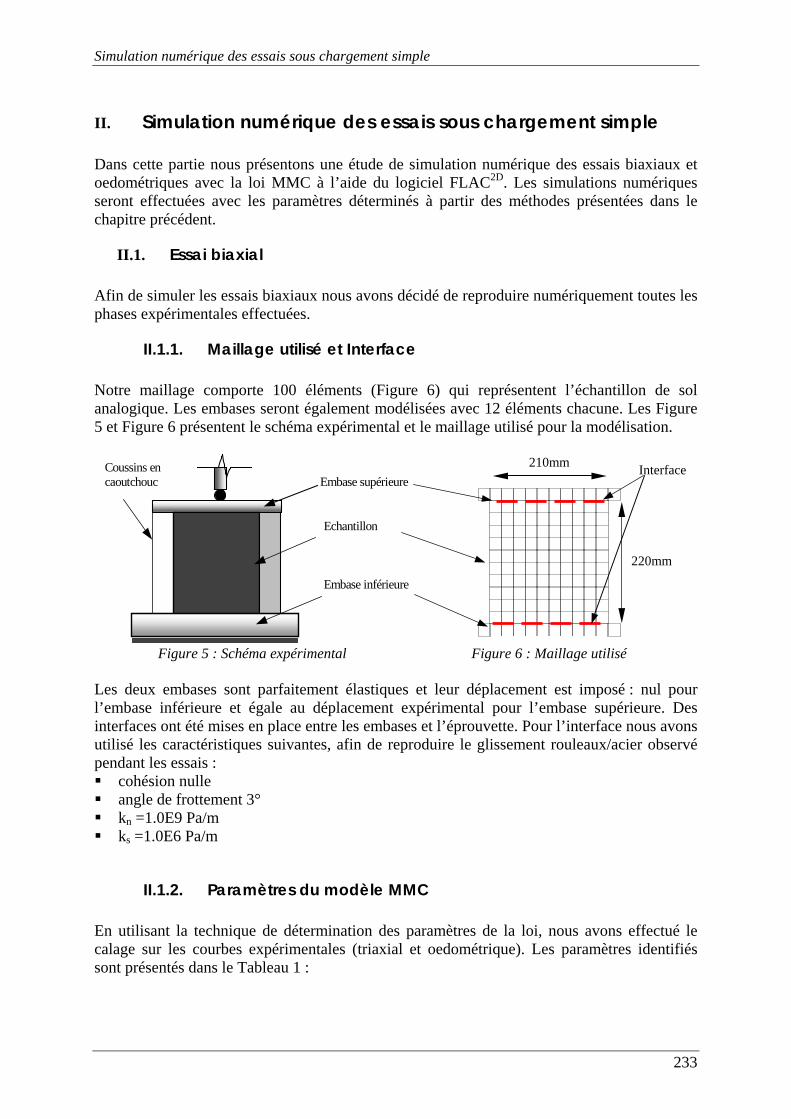
II.1.1. Maillage utilisé et Interface Notre maillage comporte 100 éléments (Figure 6) qui représentent l’échantillon de sol analogique. Les embases seront également modélisées avec 12 éléments chacune. Les Figure 5 et Figure 6 présentent le schéma expérimental et le maillage utilisé pour la modélisation.
Coussins encaoutchouc Embase supérieure
Embase inférieure
Echantillon
Figure 5 : Schéma expérimental
Figure 6 : Maillage utilisé Les deux embases sont parfaitement élastiques et leur déplacement est imposé : nul pour l’embase inférieure et égale au déplacement expérimental pour l’embase supérieure. Des interfaces ont été mises en place entre les embases et l’éprouvette. Pour l’interface nous avons utilisé les caractéristiques suivantes, afin de reproduire le glissement rouleaux/acier observé pendant les essais : cohésion nulle angle de frottement 3° kn =1.0E9 Pa/m ks =1.0E6 Pa/m
II.1.2. Paramètres du modèle MMC En utilisant la technique de détermination des paramètres de la loi, nous avons effectué le calage sur les courbes expérimentales (triaxial et oedométrique). Les paramètres identifiés sont présentés dans le Tableau 1 :
220mm
Interface210mm
Simulation numérique des essais sous chargement simple
234
Paramètres du modèle Kc Kd ν n ϕ ψr C0 ψ1 SLψ
120 1200 0.9 0.25 22 3 0.65 8 0.5
Tableau 1 : Paramètres du modèle MMC pour le matériau analogique de Schneebeli
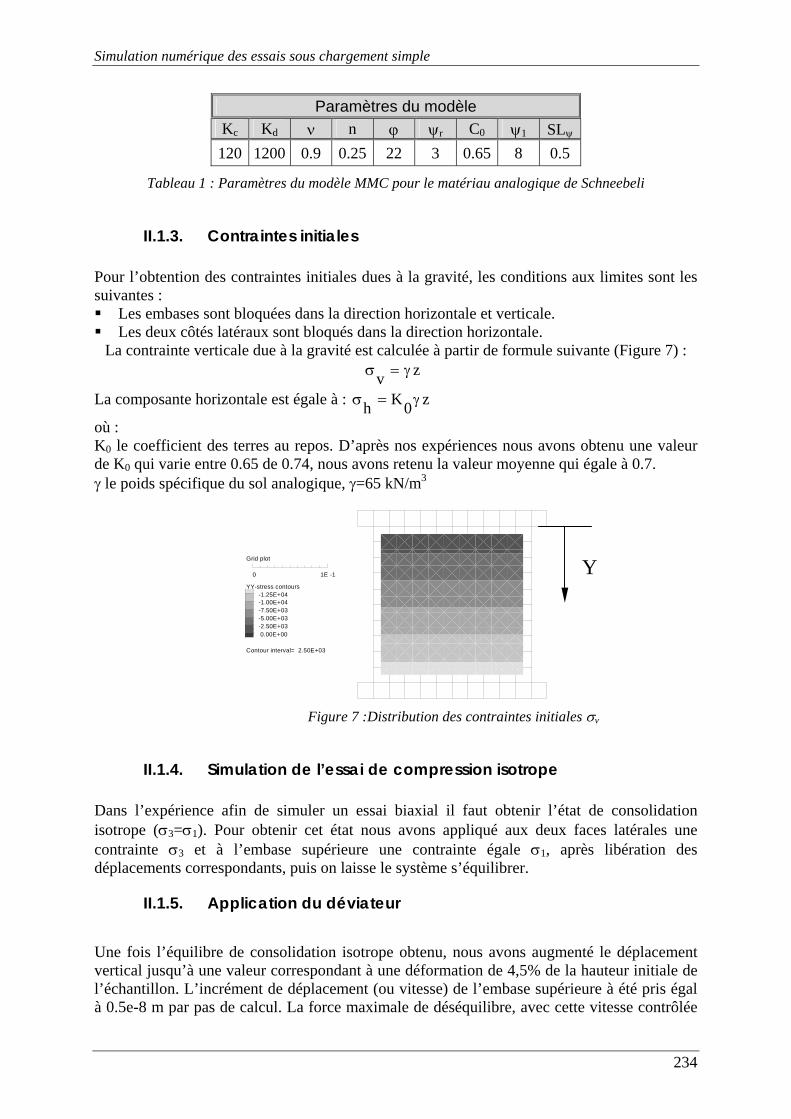
II.1.3. Contraintes initiales Pour l’obtention des contraintes initiales dues à la gravité, les conditions aux limites sont les suivantes : Les embases sont bloquées dans la direction horizontale et verticale. Les deux côtés latéraux sont bloqués dans la direction horizontale. La contrainte verticale due à la gravité est calculée à partir de formule suivante (Figure 7) :
zv γ=σ
La composante horizontale est égale à : z0Kh γ=σ
où : K0 le coefficient des terres au repos. D’après nos expériences nous avons obtenu une valeur de K0 qui varie entre 0.65 de 0.74, nous avons retenu la valeur moyenne qui égale à 0.7. γ le poids spécifique du sol analogique, γ=65 kN/m3
Grid plot
0 1E -1
YY-stress contours -1.25E+04 -1.00E+04 -7.50E+03 -5.00E+03 -2.50E+03 0.00E+00
Contour interval= 2.50E+03
Figure 7 :Distribution des contraintes initiales σv
II.1.4. Simulation de l’essai de compression isotrope Dans l’expérience afin de simuler un essai biaxial il faut obtenir l’état de consolidation isotrope (σ3=σ1). Pour obtenir cet état nous avons appliqué aux deux faces latérales une contrainte σ3 et à l’embase supérieure une contrainte égale σ1, après libération des déplacements correspondants, puis on laisse le système s’équilibrer.
II.1.5. Application du déviateur
Une fois l’équilibre de consolidation isotrope obtenu, nous avons augmenté le déplacement vertical jusqu’à une valeur correspondant à une déformation de 4,5% de la hauteur initiale de l’échantillon. L’incrément de déplacement (ou vitesse) de l’embase supérieure à été pris égal à 0.5e-8 m par pas de calcul. La force maximale de déséquilibre, avec cette vitesse contrôlée
Y
Simulation numérique des essais sous chargement simple
235
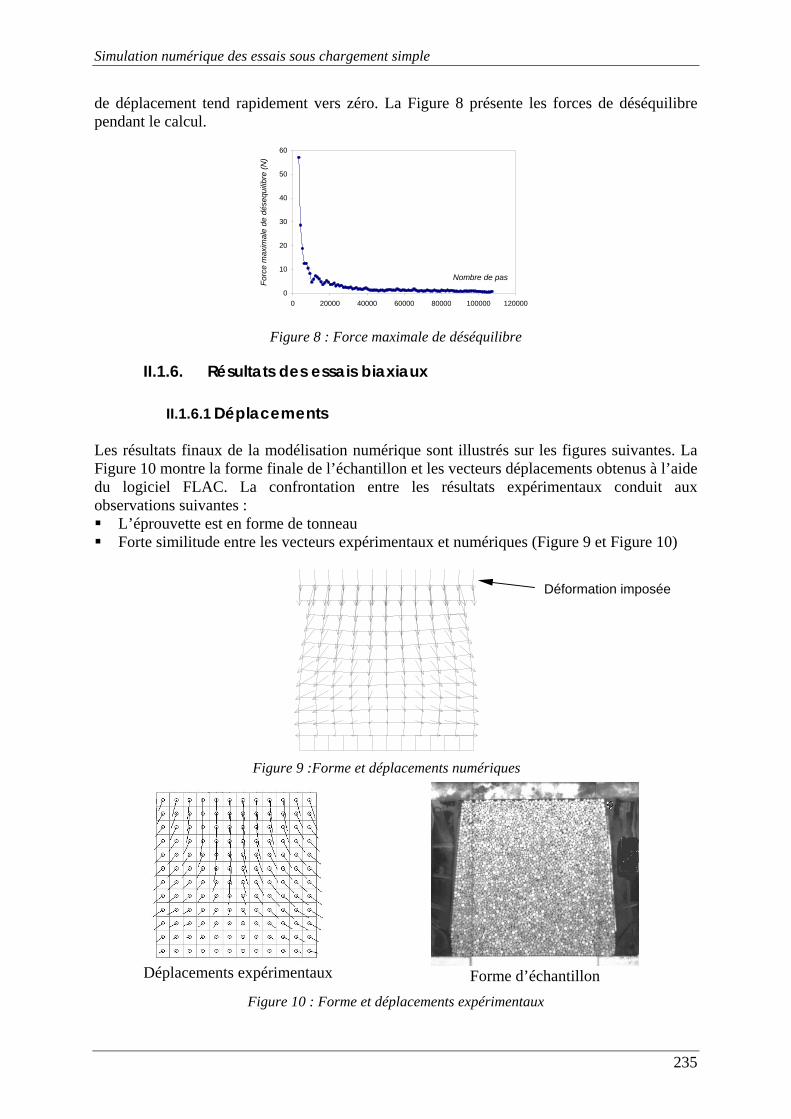
de déplacement tend rapidement vers zéro. La Figure 8 présente les forces de déséquilibre pendant le calcul.
0
10
20
30
40
50
60
0 20000 40000 60000 80000 100000 120000
Nombre de pas
Forc
e m
axim
ale
de d
éseq
uilib
re (N
)
Figure 8 : Force maximale de déséquilibre
II.1.6. Résultats des essais biaxiaux
II.1.6.1 Déplacements Les résultats finaux de la modélisation numérique sont illustrés sur les figures suivantes. La Figure 10 montre la forme finale de l’échantillon et les vecteurs déplacements obtenus à l’aide du logiciel FLAC. La confrontation entre les résultats expérimentaux conduit aux observations suivantes : L’éprouvette est en forme de tonneau Forte similitude entre les vecteurs expérimentaux et numériques (Figure 9 et Figure 10)
Figure 9 :Forme et déplacements numériques
Déplacements expérimentaux
Forme d’échantillon
Figure 10 : Forme et déplacements expérimentaux
Déformation imposée
Simulation numérique des essais sous chargement simple
236
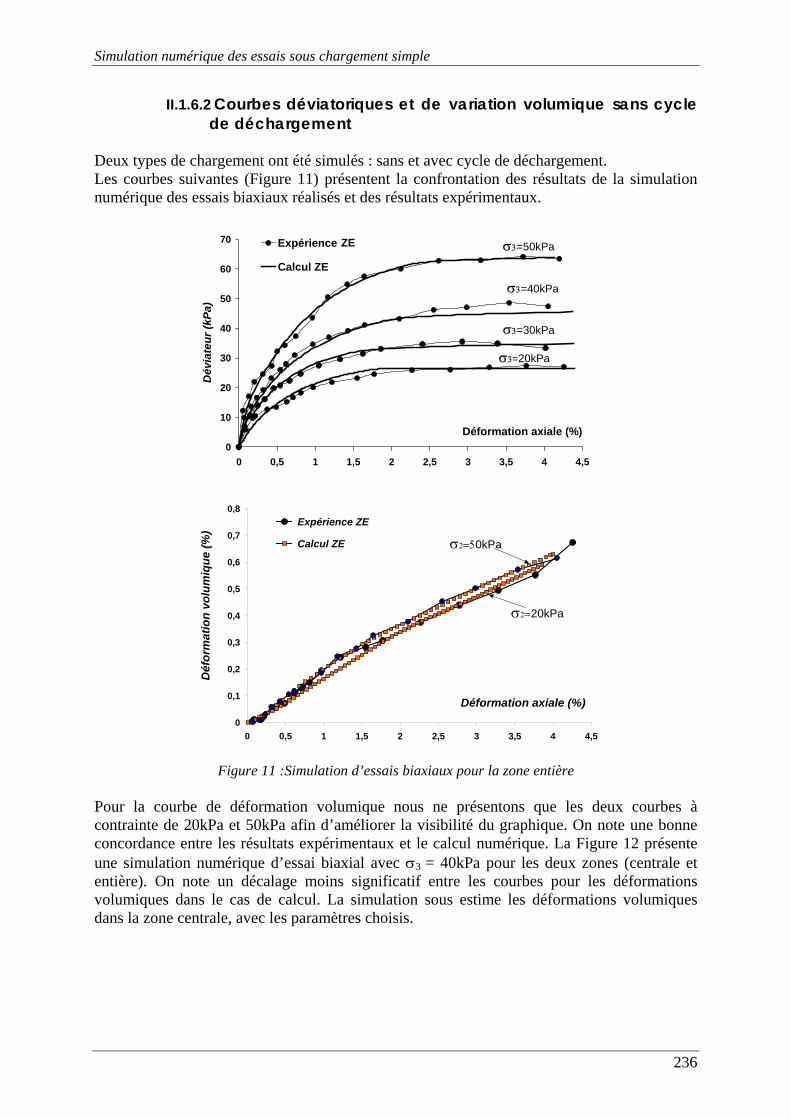
II.1.6.2 Courbes déviatoriques et de variation volumique sans cycle de déchargement
Deux types de chargement ont été simulés : sans et avec cycle de déchargement. Les courbes suivantes (Figure 11) présentent la confrontation des résultats de la simulation numérique des essais biaxiaux réalisés et des résultats expérimentaux.
0
10
20
30
40
50
60
70
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5
Déformation axiale (%)
Dév
iate
ur (k
Pa)
Expérience
Calcul ZE
σ3=50kPa
σ3=40kPa
σ3=30kPa
σ3=20kPa
ZE
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
Expérience ZE
Calcul ZE
σ2=20kPa
σ2=50kPa
Figure 11 :Simulation d’essais biaxiaux pour la zone entière
Pour la courbe de déformation volumique nous ne présentons que les deux courbes à contrainte de 20kPa et 50kPa afin d’améliorer la visibilité du graphique. On note une bonne concordance entre les résultats expérimentaux et le calcul numérique. La Figure 12 présente une simulation numérique d’essai biaxial avec σ3 = 40kPa pour les deux zones (centrale et entière). On note un décalage moins significatif entre les courbes pour les déformations volumiques dans le cas de calcul. La simulation sous estime les déformations volumiques dans la zone centrale, avec les paramètres choisis.
Simulation numérique des essais sous chargement simple
237
0
10
20
30
40
50
60
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5
Déformation axiale (%)
Dév
iate
ur (
kPa)
Calcul ZE et ZC
Expérience ZE et ZC
ZC
ZE
0
0,2
0,4
0,6
0,8
1
1,2
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%) Calcul ZE et ZC
Expérience ZE et ZCZC
ZE
Figure 12 :Simulation d’essais biaxiaux pour les deux zones ZE et ZC (σ3=40kPa)
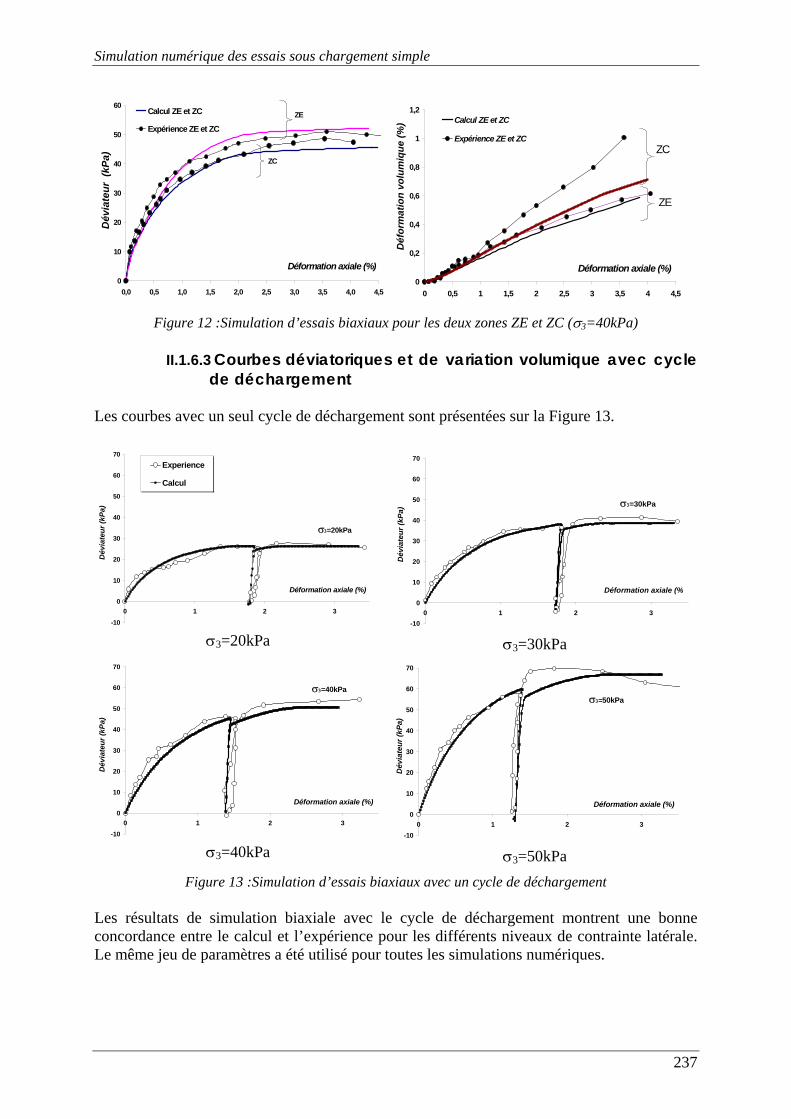
II.1.6.3 Courbes déviatoriques et de variation volumique avec cycle de déchargement
Les courbes avec un seul cycle de déchargement sont présentées sur la Figure 13.
-10
0
10
20
30
40
50
60
70
0 1 2 3
Déformation axiale (%)
Dév
iate
ur (k
Pa)
Experience
Calcul
σ3=20kPa
σ3=20kPa -10
0
10
20
30
40
50
60
70
0 1 2 3
Déformation axiale (%)
Dév
iate
ur (k
Pa) σ3=30kPa
σ3=30kPa
-10
0
10
20
30
40
50
60
70
0 1 2 3
Déformation axiale (%)
Dév
iate
ur (k
Pa)
σ3=40kPa
σ3=40kPa -10
0
10
20
30
40
50
60
70
0 1 2 3
Déformation axiale (%)
Dév
iate
ur (k
Pa)
σ3=50kPa
σ3=50kPa Figure 13 :Simulation d’essais biaxiaux avec un cycle de déchargement
Les résultats de simulation biaxiale avec le cycle de déchargement montrent une bonne concordance entre le calcul et l’expérience pour les différents niveaux de contrainte latérale. Le même jeu de paramètres a été utilisé pour toutes les simulations numériques.
Simulation numérique des essais sous chargement simple
238
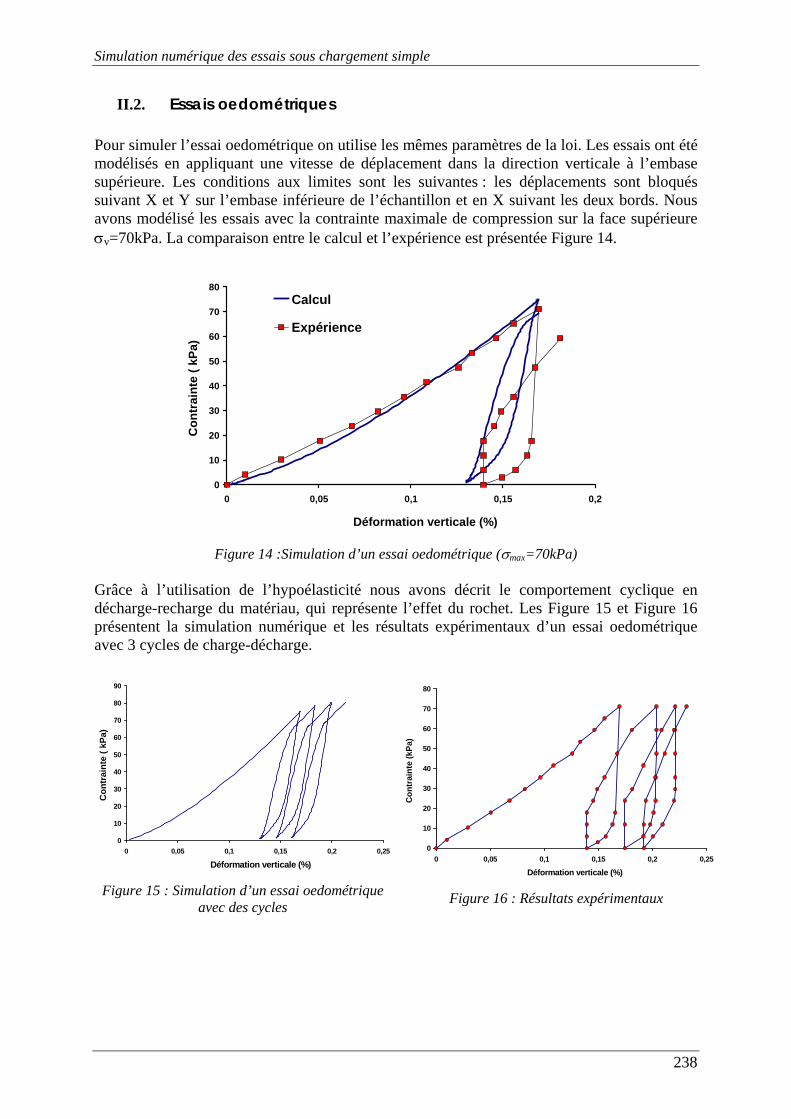
II.2. Essais oedométriques Pour simuler l’essai oedométrique on utilise les mêmes paramètres de la loi. Les essais ont été modélisés en appliquant une vitesse de déplacement dans la direction verticale à l’embase supérieure. Les conditions aux limites sont les suivantes : les déplacements sont bloqués suivant X et Y sur l’embase inférieure de l’échantillon et en X suivant les deux bords. Nous avons modélisé les essais avec la contrainte maximale de compression sur la face supérieure σv=70kPa. La comparaison entre le calcul et l’expérience est présentée Figure 14.
0
10
20
30
40
50
60
70
80
0 0,05 0,1 0,15 0,2
Déformation verticale (%)
Con
trai
nte
( kPa
)
Calcul
Expérience
Figure 14 :Simulation d’un essai oedométrique (σmax=70kPa)
Grâce à l’utilisation de l’hypoélasticité nous avons décrit le comportement cyclique en décharge-recharge du matériau, qui représente l’effet du rochet. Les Figure 15 et Figure 16 présentent la simulation numérique et les résultats expérimentaux d’un essai oedométrique avec 3 cycles de charge-décharge.
0
10
20
30
40
50
60
70
80
90
0 0,05 0,1 0,15 0,2 0,25
Déformation verticale (%)
Con
trai
nte
( kPa
)
Figure 15 : Simulation d’un essai oedométrique avec des cycles
0
10
20
30
40
50
60
70
80
0 0,05 0,1 0,15 0,2 0,25
Déformation verticale (%)
Con
trai
nte
(kPa
)
Figure 16 : Résultats expérimentaux
Simulation numérique des essais sous chargement simple
239
II.3. Validation du modèle sur des essais réalisés sur le matériau analogique par d’autres chercheurs
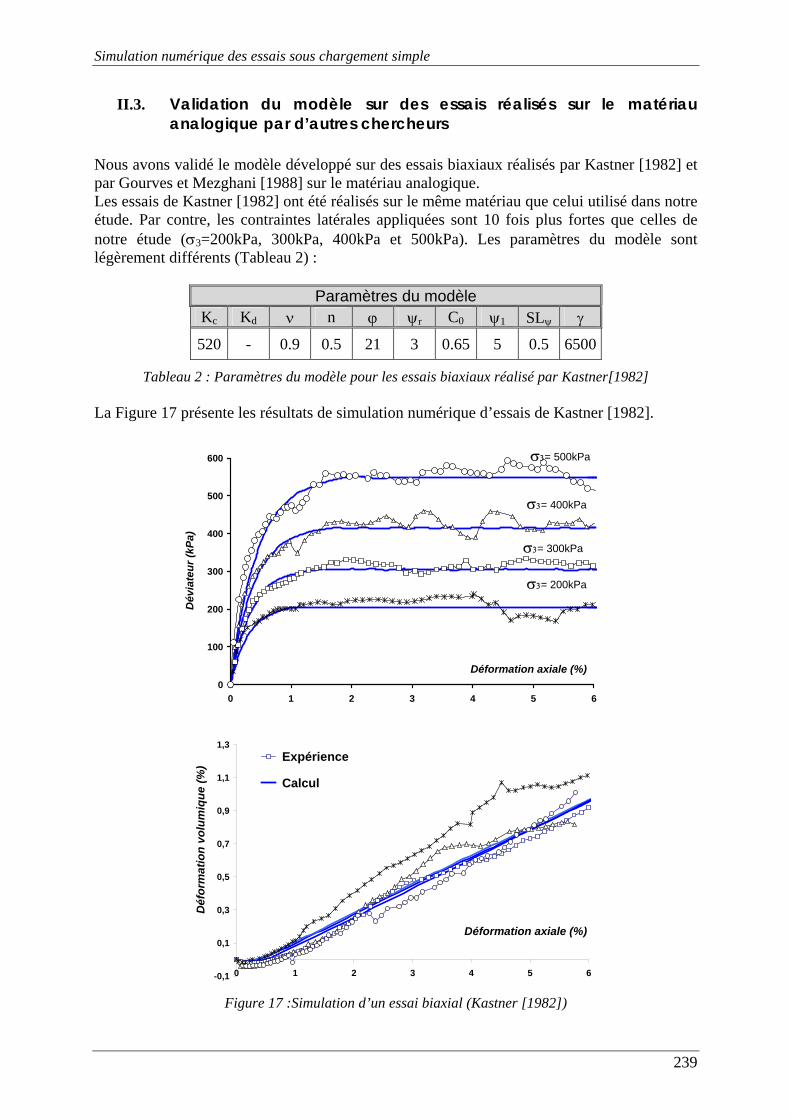
Nous avons validé le modèle développé sur des essais biaxiaux réalisés par Kastner [1982] et par Gourves et Mezghani [1988] sur le matériau analogique. Les essais de Kastner [1982] ont été réalisés sur le même matériau que celui utilisé dans notre étude. Par contre, les contraintes latérales appliquées sont 10 fois plus fortes que celles de notre étude (σ3=200kPa, 300kPa, 400kPa et 500kPa). Les paramètres du modèle sont légèrement différents (Tableau 2) :
Paramètres du modèle Kc Kd ν n ϕ ψr C0 ψ1 SLψ γ
520 - 0.9 0.5 21 3 0.65 5 0.5 6500
Tableau 2 : Paramètres du modèle pour les essais biaxiaux réalisé par Kastner[1982] La Figure 17 présente les résultats de simulation numérique d’essais de Kastner [1982].
0
100
200
300
400
500
600
0 1 2 3 4 5 6
Déformation axiale (%)
Dév
iate
ur (k
Pa)
σ3= 200kPa
σ3= 300kPa
σ3= 400kPa
σ3= 500kPa
-0,1
0,1
0,3
0,5
0,7
0,9
1,1
1,3
0 1 2 3 4 5 6
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
Expérience
Calcul
Figure 17 :Simulation d’un essai biaxial (Kastner [1982])
Simulation numérique des essais sous chargement simple
240
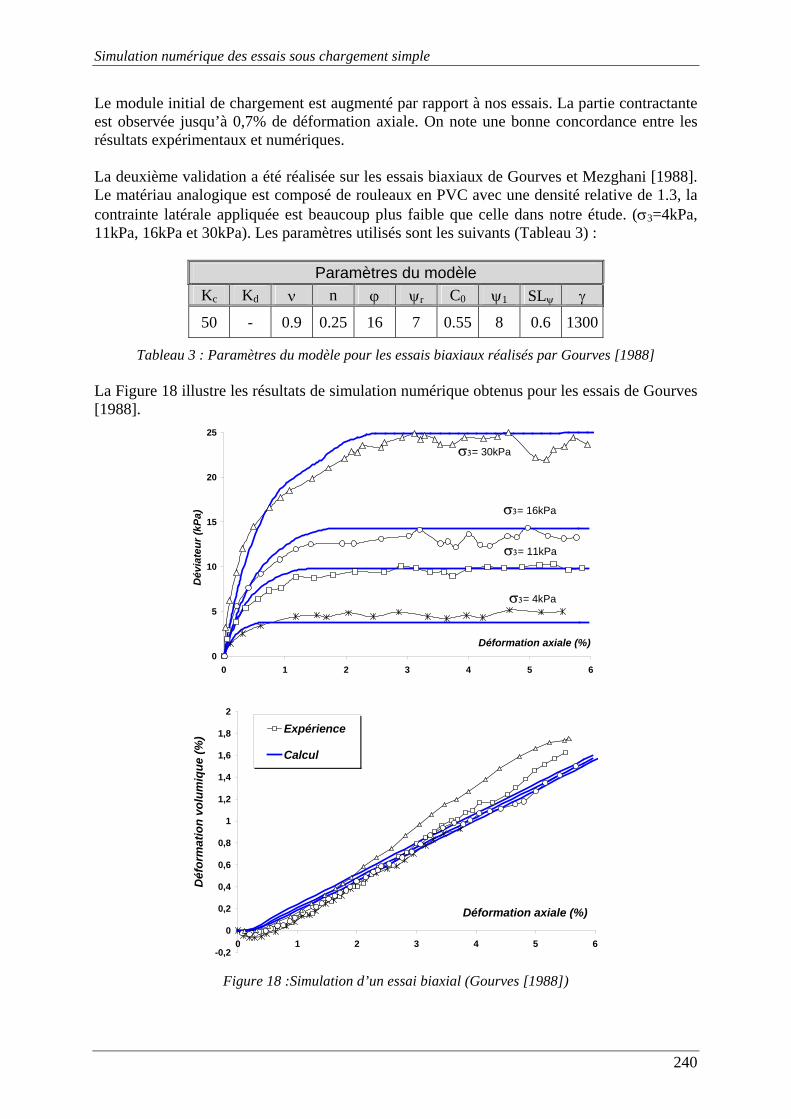
Le module initial de chargement est augmenté par rapport à nos essais. La partie contractante est observée jusqu’à 0,7% de déformation axiale. On note une bonne concordance entre les résultats expérimentaux et numériques. La deuxième validation a été réalisée sur les essais biaxiaux de Gourves et Mezghani [1988]. Le matériau analogique est composé de rouleaux en PVC avec une densité relative de 1.3, la contrainte latérale appliquée est beaucoup plus faible que celle dans notre étude. (σ3=4kPa, 11kPa, 16kPa et 30kPa). Les paramètres utilisés sont les suivants (Tableau 3) :
Paramètres du modèle Kc Kd ν n ϕ ψr C0 ψ1 SLψ γ
50 - 0.9 0.25 16 7 0.55 8 0.6 1300
Tableau 3 : Paramètres du modèle pour les essais biaxiaux réalisés par Gourves [1988] La Figure 18 illustre les résultats de simulation numérique obtenus pour les essais de Gourves [1988].
0
5
10
15
20
25
0 1 2 3 4 5 6
Déformation axiale (%)
Dév
iate
ur (k
Pa)
σ3= 4kPa
σ3= 11kPa
σ3= 16kPa
σ3= 30kPa
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4 5 6
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%) Expérience
Calcul
Figure 18 :Simulation d’un essai biaxial (Gourves [1988])
Simulation numérique des essais sous chargement simple
241
On note une zone de contractance très faible tout au début de chargement. La valeur de ϕ est différente de la notre du fait de la densité des rouleaux et de la nature du matériau (PVC). Nous avons comparé les paramètres utilisés pour les trois études, afin de trouver une liaison entre eux. Le Tableau 4 réunit les paramètres adaptés pour les différentes expérimentations.
Paramètres du modèle Kc Kd ν n ϕ ψr C0 ψ1 SLψ γ
Dolzhenko [2001] 120 1200 0.9 0.25 22 3 0.65 8 0.5 6500Kastner [1982] 520 - 0.9 0.5 21 3 0.65 5 0.5 6500Gourves [1988] 50 - 0.9 0.25 16 7 0.55 8 0.6 1300
Tableau 4 : Comparaison des paramètres pour les différents essais Pour les essais de Gourves les paramètres sont très différents car il s’agit d’un matériau différent. Par contre, pour les essais de Kastner (fort niveau de contraintes) et le notre (faible niveau de contraintes) il s’agit de même matériau. On constate qu’il est difficile de garder les mêmes paramètres sur une très grande plage de contraintes. A forte contrainte latérale, on voit une légère diminution de ϕ et ψ et une augmentation du Kc, paramètre du module d’Young en chargement primaire. Cette étude nous a permis de valider notre modèle de comportement sur différents essais réalisés sur des matériaux plus au moins proches du notre avec différents niveaux de contrainte latérale appliquée.
III. Influence des paramètres du modèle MMC sur la simulation des essais d’identification
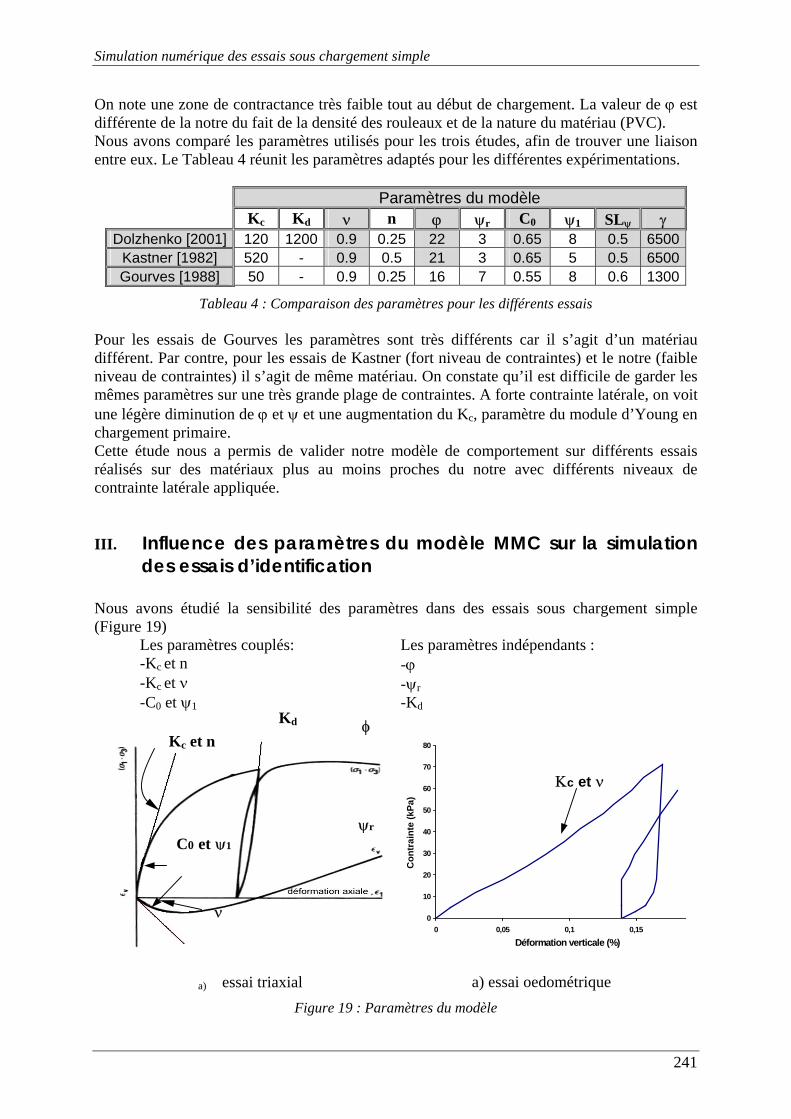
Nous avons étudié la sensibilité des paramètres dans des essais sous chargement simple (Figure 19)
Les paramètres couplés: -Kc et n -Kc et ν -C0 et ψ1
Les paramètres indépendants : -ϕ -ψr -Kd
a) essai triaxial
0
10
20
30
40
50
60
70
80
0 0,05 0,1 0,15
Déformation verticale (%)
Con
trai
nte
(kPa
)
a) essai oedométrique
Figure 19 : Paramètres du modèle
Κc et ν
Kd Kc et n
ν
C0 et ψ1
φ
ψr
Simulation numérique des essais sous chargement simple
242
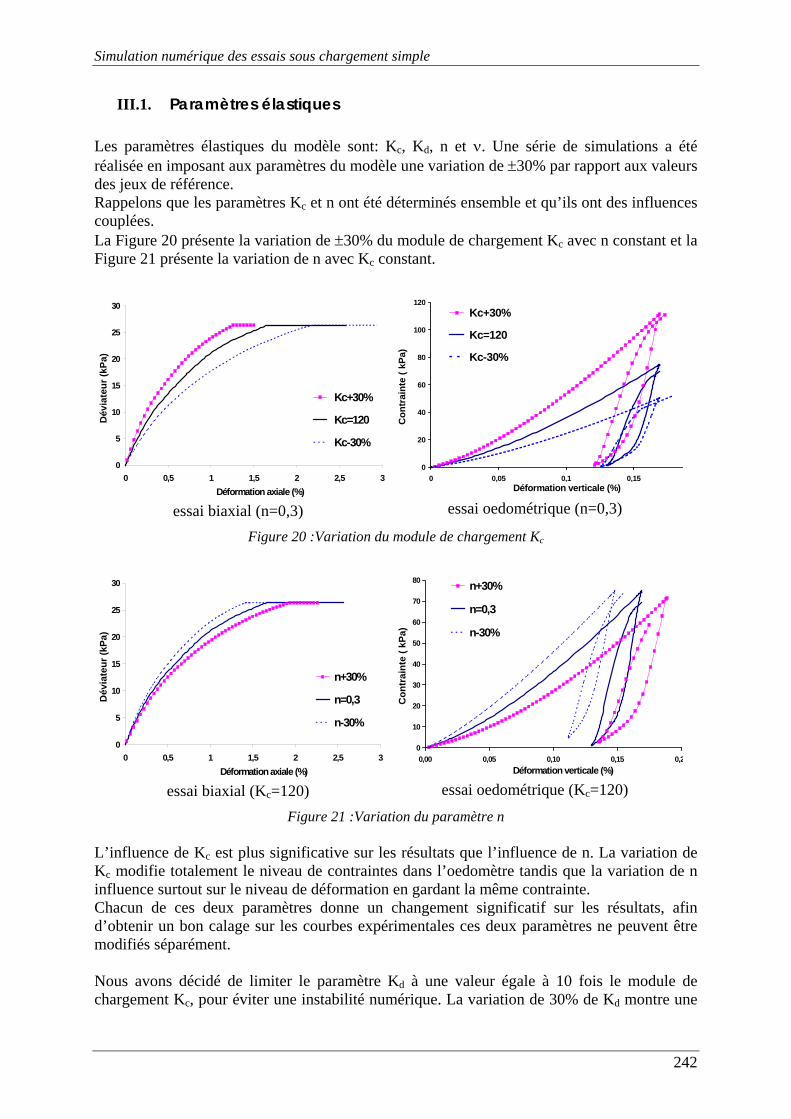
III.1. Paramètres élastiques Les paramètres élastiques du modèle sont: Kc, Kd, n et ν. Une série de simulations a été réalisée en imposant aux paramètres du modèle une variation de ±30% par rapport aux valeurs des jeux de référence. Rappelons que les paramètres Kc et n ont été déterminés ensemble et qu’ils ont des influences couplées. La Figure 20 présente la variation de ±30% du module de chargement Kc avec n constant et la Figure 21 présente la variation de n avec Kc constant.
0
5
10
15
20
25
30
0 0,5 1 1,5 2 2,5 3Déformation axiale (%)
Dév
iate
ur (k
Pa)
Kc+30%
Kc=120
Kc-30%
essai biaxial (n=0,3)
0
20
40
60
80
100
120
0 0,05 0,1 0,15Déformation verticale (%)
Con
trai
nte
( kPa
)
Kc+30%
Kc=120
Kc-30%
essai oedométrique (n=0,3)
Figure 20 :Variation du module de chargement Kc
0
5
10
15
20
25
30
0 0,5 1 1,5 2 2,5 3Déformation axiale (%)
Dév
iate
ur (k
Pa)
n+30%
n=0,3
n-30%
essai biaxial (Kc=120)
0
10
20
30
40
50
60
70
80
0,00 0,05 0,10 0,15 0,2Déformation verticale (%)
Con
trai
nte
( kPa
)
n+30%
n=0,3
n-30%
essai oedométrique (Kc=120)
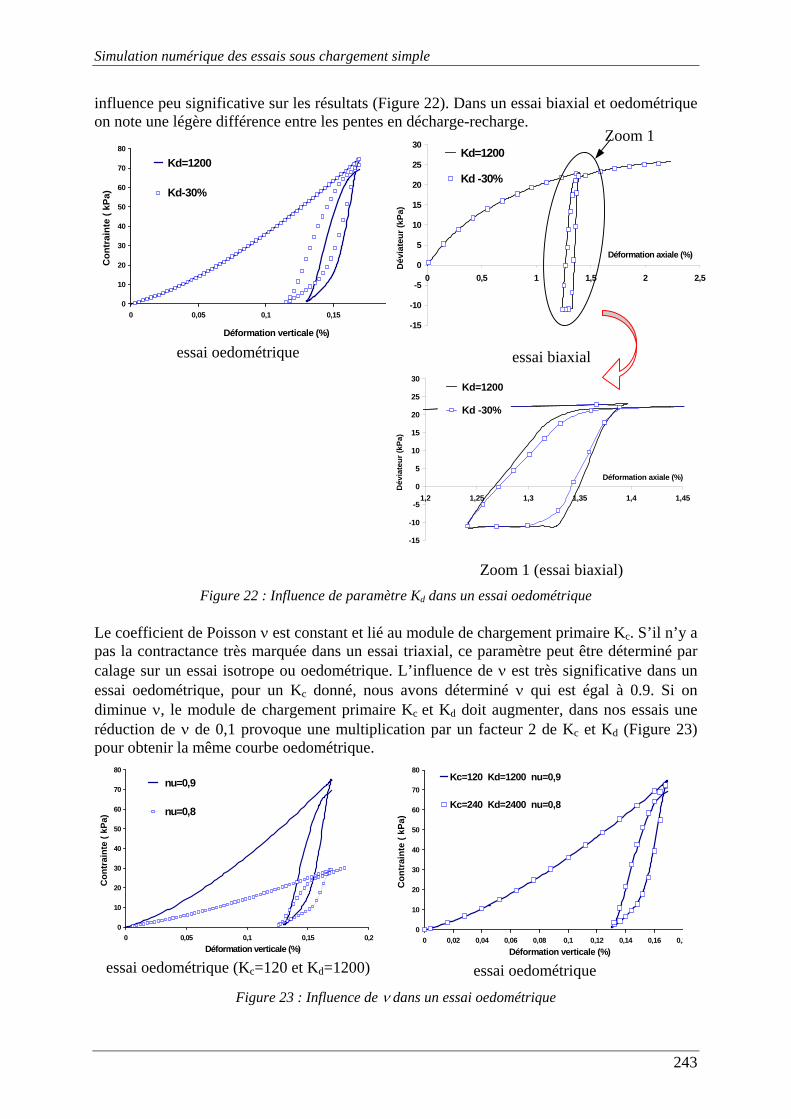
Figure 21 :Variation du paramètre n L’influence de Kc est plus significative sur les résultats que l’influence de n. La variation de Kc modifie totalement le niveau de contraintes dans l’oedomètre tandis que la variation de n influence surtout sur le niveau de déformation en gardant la même contrainte. Chacun de ces deux paramètres donne un changement significatif sur les résultats, afin d’obtenir un bon calage sur les courbes expérimentales ces deux paramètres ne peuvent être modifiés séparément. Nous avons décidé de limiter le paramètre Kd à une valeur égale à 10 fois le module de chargement Kc, pour éviter une instabilité numérique. La variation de 30% de Kd montre une
Simulation numérique des essais sous chargement simple
243
influence peu significative sur les résultats (Figure 22). Dans un essai biaxial et oedométrique on note une légère différence entre les pentes en décharge-recharge.
0
10
20
30
40
50
60
70
80
0 0,05 0,1 0,15
Déformation verticale (%)
Con
trai
nte
( kPa
)
Kd=1200
Kd-30%
essai oedométrique
-15
-10
-5
0
5
10
15
20
25
30
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Dév
iate
ur (k
Pa)
Kd=1200
Kd -30%
essai biaxial
-15
-10
-5
0
5
10
15
20
25
30
1,2 1,25 1,3 1,35 1,4 1,45
Déformation axiale (%)
Dév
iate
ur (k
Pa)
Kd=1200
Kd -30%
Zoom 1 (essai biaxial)
Figure 22 : Influence de paramètre Kd dans un essai oedométrique Le coefficient de Poisson ν est constant et lié au module de chargement primaire Kc. S’il n’y a pas la contractance très marquée dans un essai triaxial, ce paramètre peut être déterminé par calage sur un essai isotrope ou oedométrique. L’influence de ν est très significative dans un essai oedométrique, pour un Kc donné, nous avons déterminé ν qui est égal à 0.9. Si on diminue ν, le module de chargement primaire Kc et Kd doit augmenter, dans nos essais une réduction de ν de 0,1 provoque une multiplication par un facteur 2 de Kc et Kd (Figure 23) pour obtenir la même courbe oedométrique.
0
10
20
30
40
50
60
70
80
0 0,05 0,1 0,15 0,2Déformation verticale (%)
Con
trai
nte
( kPa
)
nu=0,9
nu=0,8
essai oedométrique (Kc=120 et Kd=1200)
0
10
20
30
40
50
60
70
80
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,1Déformation verticale (%)
Con
trai
nte
( kPa
)
Kc=120 Kd=1200 nu=0,9
Kc=240 Kd=2400 nu=0,8
essai oedométrique
Figure 23 : Influence de ν dans un essai oedométrique
Zoom 1
Simulation numérique des essais sous chargement simple
244
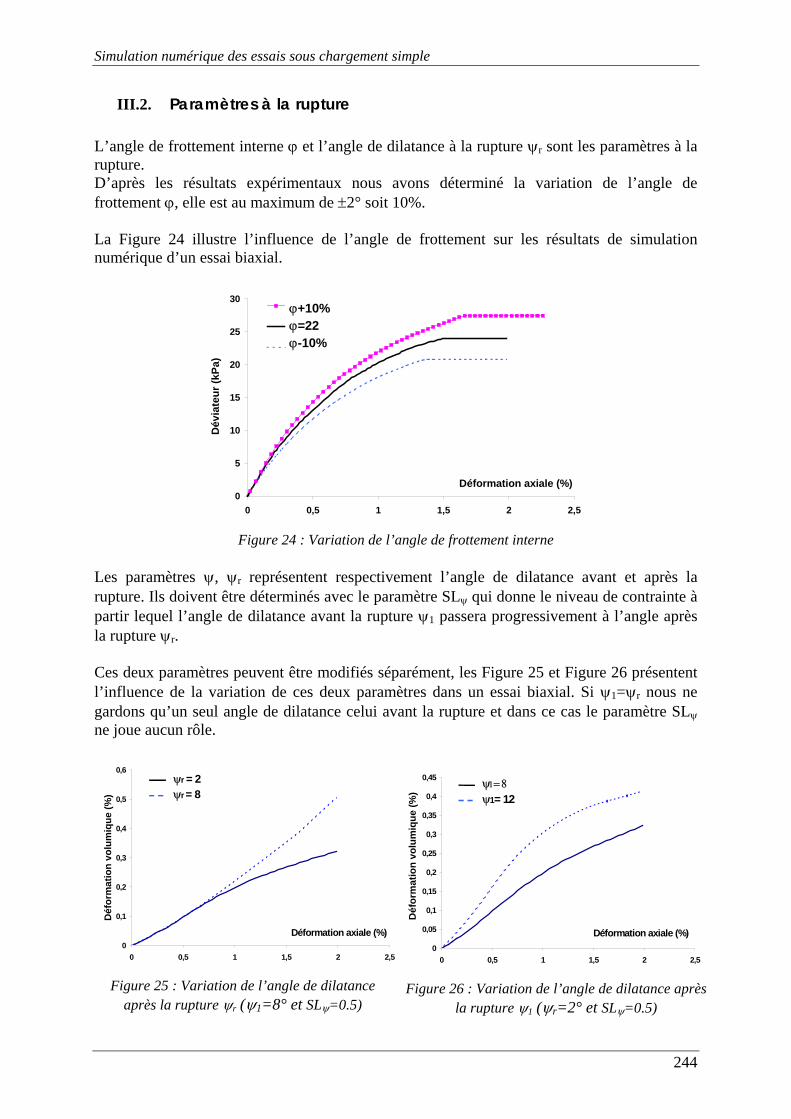
III.2. Paramètres à la rupture L’angle de frottement interne ϕ et l’angle de dilatance à la rupture ψr sont les paramètres à la rupture. D’après les résultats expérimentaux nous avons déterminé la variation de l’angle de frottement ϕ, elle est au maximum de ±2° soit 10%. La Figure 24 illustre l’influence de l’angle de frottement sur les résultats de simulation numérique d’un essai biaxial.
0
5
10
15
20
25
30
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Dév
iate
ur (k
Pa)
phi +10%phi=22phi -10%
ϕ+10%ϕ=22ϕ-10%
Figure 24 : Variation de l’angle de frottement interne
Les paramètres ψ, ψr représentent respectivement l’angle de dilatance avant et après la rupture. Ils doivent être déterminés avec le paramètre SLψ qui donne le niveau de contrainte à partir lequel l’angle de dilatance avant la rupture ψ1 passera progressivement à l’angle après la rupture ψr. Ces deux paramètres peuvent être modifiés séparément, les Figure 25 et Figure 26 présentent l’influence de la variation de ces deux paramètres dans un essai biaxial. Si ψ1=ψr nous ne gardons qu’un seul angle de dilatance celui avant la rupture et dans ce cas le paramètre SLψ ne joue aucun rôle.
0
0,1
0,2
0,3
0,4
0,5
0,6
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
ψr = 2 ψr = 8
Figure 25 : Variation de l’angle de dilatance après la rupture ψr (ψ1=8° et SLψ=0.5)
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
ψ1= 8 ψ1= 12
Figure 26 : Variation de l’angle de dilatance après la rupture ψ1 (ψr=2° et SLψ=0.5)
Simulation numérique des essais sous chargement simple
245
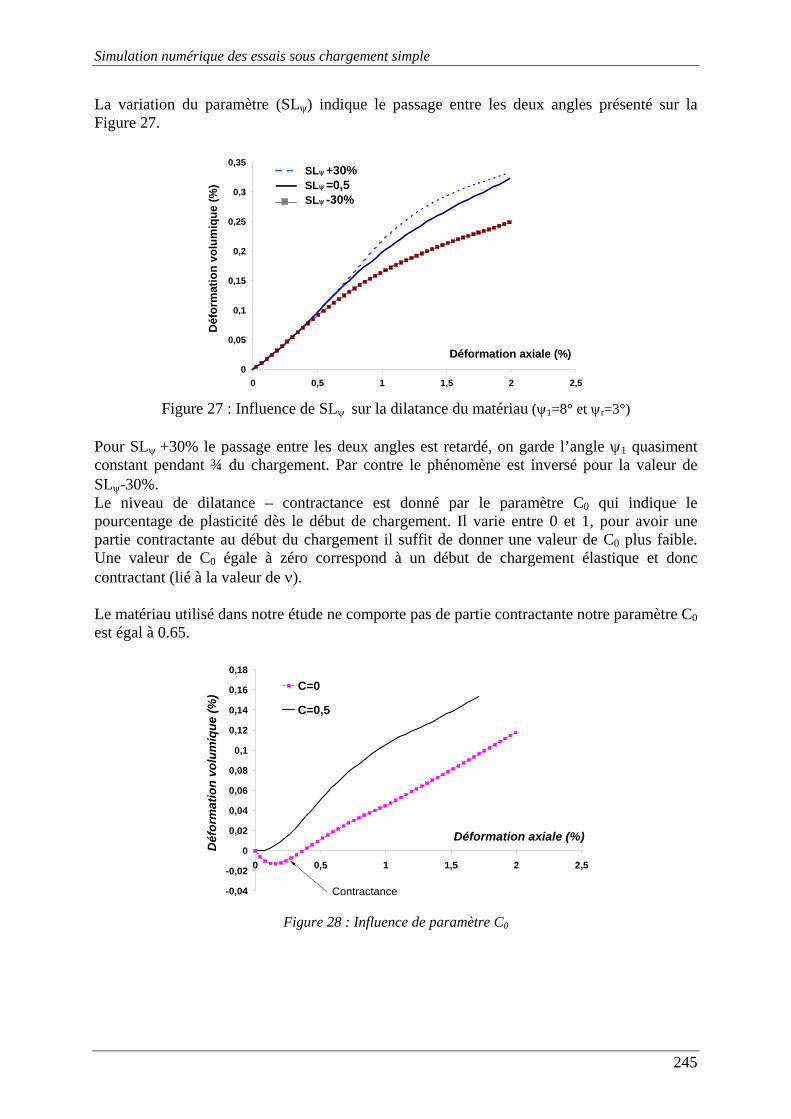
La variation du paramètre (SLψ) indique le passage entre les deux angles présenté sur la Figure 27.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
SLψ +30% SLψ =0,5 SLψ -30%
Figure 27 : Influence de SLψ sur la dilatance du matériau (ψ1=8° et ψr=3°)
Pour SLψ +30% le passage entre les deux angles est retardé, on garde l’angle ψ1 quasiment constant pendant ¾ du chargement. Par contre le phénomène est inversé pour la valeur de SLψ-30%. Le niveau de dilatance – contractance est donné par le paramètre C0 qui indique le pourcentage de plasticité dès le début de chargement. Il varie entre 0 et 1, pour avoir une partie contractante au début du chargement il suffit de donner une valeur de C0 plus faible. Une valeur de C0 égale à zéro correspond à un début de chargement élastique et donc contractant (lié à la valeur de ν). Le matériau utilisé dans notre étude ne comporte pas de partie contractante notre paramètre C0 est égal à 0.65.
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,16
0,18
0 0,5 1 1,5 2 2,5
Déformation axiale (%)
Déf
orm
atio
n vo
lum
ique
(%)
C=0
C=0,5
Contractance Figure 28 : Influence de paramètre C0
Simulation numérique des essais sous chargement simple
246
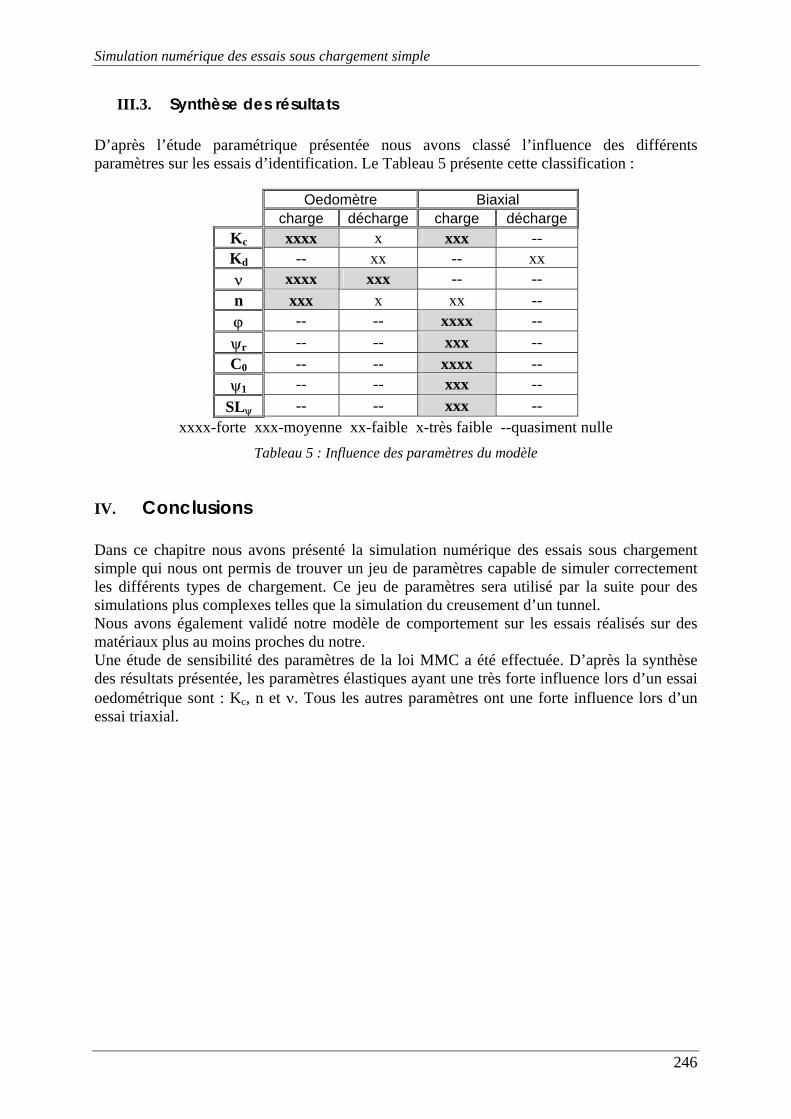
III.3. Synthèse des résultats D’après l’étude paramétrique présentée nous avons classé l’influence des différents paramètres sur les essais d’identification. Le Tableau 5 présente cette classification :
Oedomètre Biaxial
charge décharge charge décharge Kc xxxx x xxx -- Kd -- xx -- xx ν xxxx xxx -- -- n xxx x xx -- ϕ -- -- xxxx -- ψr -- -- xxx -- C0 -- -- xxxx -- ψ1 -- -- xxx --
SLψ -- -- xxx -- xxxx-forte xxx-moyenne xx-faible x-très faible --quasiment nulle
Tableau 5 : Influence des paramètres du modèle
IV. Conclusions Dans ce chapitre nous avons présenté la simulation numérique des essais sous chargement simple qui nous ont permis de trouver un jeu de paramètres capable de simuler correctement les différents types de chargement. Ce jeu de paramètres sera utilisé par la suite pour des simulations plus complexes telles que la simulation du creusement d’un tunnel. Nous avons également validé notre modèle de comportement sur les essais réalisés sur des matériaux plus au moins proches du notre. Une étude de sensibilité des paramètres de la loi MMC a été effectuée. D’après la synthèse des résultats présentée, les paramètres élastiques ayant une très forte influence lors d’un essai oedométrique sont : Kc, n et ν. Tous les autres paramètres ont une forte influence lors d’un essai triaxial.