Embed Size (px)
Citation preview
République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur
et de la Recherche Scientifique
Université Batna 1 – Batna
ⵜ
77
ⵜⵡ ⵜⴱ
9
ⴰ
1
ⵙ ⵏⵏ ⴻ
I ES NAE
ⴷ ⵜⴰ
TIV
ⵉ
Aⵜ
NR TB
Uⴰ
Facluté des Sciences de la Matière
Département de Physique
Mémoire de Soutenance
En Vue de l’obtention du Diplôme de Master en Physique
Option : Physique Théorique
Thème :
La relativité générale et lagravitation quantique
Présenté par : Sous la direction de :
GHEDJOUTI Bochra Pr. S.ZAIM
BAGHEZZA Sabrina
devant le jury :
Président : Dr. Y.Delenda Univ Batna 1.
Rapporteur : Pr. S.Zaim Univ Batna 1.
Examinateur : Pr. M.Aouachria Univ Batna 1.
Année Universitaire : 2015 – 2016
Table des matières
1 Introduction 11
2 Introduction à la relativité générale 14
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Comparaison entre la théorie de gravitation de Newton et d’Einstein . . . . . . . 15
2.2.1 Différence de la théorie Newtoniènne de gravitation à celle d’Einstein . . 15
2.2.2 Théorie de Newton comme une limite de théorie d’Einstein . . . . . . . . 16
2.3 Les postulats de la relativité générale : . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Formalisme mathématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.1 Équation de géodésique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.2 Les symboles de Christoffel . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.3 Tenseur de courbure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.4 Tenseur de Ricci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.5 Tenseur d’Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.6 Tenseur d’énergie-impulsion . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 L’équation d’Einstein 23
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 L’équation d’Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 la limite Newtonienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 la solution de Schwarzchild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5 Représentation de la métrique de Schwarzschild . . . . . . . . . . . . . . . . . . 34
3.6 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2
4 La relativité générale dans l’espace-temps non commutative 36
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Thermodynamique de Schwarzschild de trous noirs . . . . . . . . . . . . . . . . 36
4.2.1 La température de Hawking : . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 l’espace-temps non commutative . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3.1 Calcule de rH dans l’espace-temps non commutative . . . . . . . . . . . . 42
4.3.2 Température non commutative de Hawking . . . . . . . . . . . . . . . . . 42
4.4 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 conclusion 45
A Les Calculs 47
A.1 Le tenseur d’Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
B Definition 49
B.1 Les postulats de la relativité générale . . . . . . . . . . . . . . . . . . . . . . . . 49
3

Dédicace
Je dédie ce travail aux symbole de dévouement ; mes chères parents qui ne m’avarent pas à aucun
effort pour m’aident durant mon chemin d’etude.
À ma sœur Nouara.
À mes frères : Ibrahim, Saâdane, Kamel, Hichame, et Houcine.
À ma coupine Bochra .
À toute ma famille, et à tout mes amies .
SABRINA
4

Dédicace
Je dédie ce modeste travail :
À toute ma famille ; mes chers parents qu’Allah me les garde, mon unique frère Walid et la
petite Batoul.
À ma coupine Sabrina et mes collègues.
À tous mes amies.
À ceux qui m’aiment.
Bochra
5
Remerciements
Nos premiers remerciements vont à Dieu Le Clément et Le Miséricordieux, qui nous a accordés
tous les bénédictions.
Nos remerciements s’adressent tout particulièrement au professeur S.ZAIM notre directeur de
recherche, pour avoir accepté de diriger ce travail, pour sa disponibilité, sa patience, son encou-
ragement et ses conseils précieux, qui nous ont permis de réaliser ce travail dans les meilleures
conditions.
Nous tenons également à remercier les membres de jury : Dr Y.Delenda. et Prof. M.Aouachria
d’avoir accepté de lire et d’évaluer ce modeste travail.
Nous tenons à remercier aussi tous nos enseignants du département de la science de la matière
puisque nous leur devons nos progrès et nos connaissances. Nous tenons à remercier aussi tous
ceux qui ont contribué de près ou de loin à la réalisation de ce travail.
6
Table des figures
2.1 géodésique dans l’espace plat et lespace courbé . . . . . . . . . . . . . . . . . . . 17
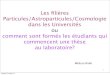
3.1 L’evolution d’univers selon les valeurs de Λ [15] . . . . . . . . . . . . . . . . . . 28
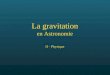
3.2 L’effet de la matière sur la géométrie de l’espace-temps [16] . . . . . . . . . . . . 29
3.3 diagramme de la métrique de Schwarzschild dans l’espace-temps . . . . . . . . . 35
4.1 g00 dans l’espace-temps non-commutative . . . . . . . . . . . . . . . . . . . . . . 41
4.2 La température de hawking dans l’espace non-commutative . . . . . . . . . . . . 44
7
8
Résumé
Le sujet qui sera traité ; la relativité générale et la gravitation quantique est, depuis long-
temps, l’une des problématiques primordiales dans le domaine de la physique. Notre étude donc
s’inscrira dans le domaine de la relativité générale, elle aura pour objet la solution de la métrique
de schwarzschild qui sera traité analytiquement, et aussi la thermodynamique du trou noir dans
l’espace commutative et non-commutative, nous commencerons d’abord par les calculs analy-
tiques d’horizon des géométries extèrnes du trou noir, ensuite nous analyserons la température
non commutative de Hawking, et enfin nous discuterons l’effet de non commutativité sur la
température calculée.
Abstract
The study of the general relativity and the quantum gravity has traditionally been one of the
most problematic views for the field of general relativity. The present study will endeavor to
append to the field of general relativity. It will aim at scrutinising the solution of schwarzschild
metric, using analytical method, as for the thermodynamics of the black hole on the commutative
or non-commutative space-time. Foremost, we will start calculating analytically the horizons of
external geometries of the black hole, including the Hawking temperature. Eventually, we will
discuss the effect of the non commutative property on the calculated temperature.
9
Chapitre 1
Introduction
Dans la théorie Newtoniènne les lois de la mécanique classique donnent les solutions aux pro-
blèmes physiques, mais quelques difficultés s’apparrait, alors en 20eme sciècle il apparait deux
grandes découvertes scientifiques, d’une part la mécanique quantique et d’autre part la théorie
de relativité introduisait par A.Einstein. La théorie de la relativité contient deux théorèmes
principales : relativité restreinte et générale ; ces deux dérnières ont remplacés les concepts d’es-
pace absolu et de temps absolu de Newton.
La relativité générale comme s’appelle théorie d’Einstein ; c’est une théorie moderne de l’espace-
temps et de la gravitation, elle permet de concilier deux différentes théorèmes importantes, celle
de la gravitation Newtoniènne et celle de la relativité restreinte[1]. Cette théorie est devenu l’un
des acteurs essentiele de la science de point, elle est un outil fondamental de cosmologie par ce
qu’elle décrit l’univers macroscopique depuis le big bang, en passant par le système solaire, les
étoiles à neutrons et les ondes gravitaionnelles jusqu’à la physique des trous noirs.
La relativité générale qui est au cœur de ce mémoire c’est la théorie de la gravitation formu-
lée par A.Einstein en 1915 aprés la formulation de la relativité restreinte en 1905, dans laquelle
l’espace et le temps sont considérés comme une seule entité appelée l’espace-temps[2]. Ce dérnier
est caractérisé dans la relativité générale par la courbure résultée à cause de la présence de la
matière, au contraire de laquel la relativité reistreinte où l’espace-temps est plat.
La théorie d’Einstein décrit l’intéraction gravitationnelle entre les masses et les particules par
une courbure de l’espace-temps, où cette théorie indique que l’espace-temps est un champs pos-
sède une géométrie Riemaniènne dans laquelle la courbure est présente et les corps se mouvent
10
au cours des géodésiques ; qui sont la généralisation des lignes droites, alors l’intèraction est
dècrit totalement par la gèomètrie.
Par conséquent la théorie générale d’Einstein est fondée sur l’idée que l’espace-temps est cour-
bée, donc quelle forme doit il prend les lois classiques ?
À ce mémoire nous allons faire une extension la théorie de Newton à la théorie plus générale
d’Einstein (relativité générale).
La deuxième découverte la plus importante de 20eme sciècle c’est la découverte de la for-
mulation mathématique de la mécanique quantique par Heisenberg en 1925, la transition de
la mécanique classique à la mécanique quantique donne le passage de l’algèbre commutative
des observables classiques à l’algèbre des observables quantiques. c’est-à-dire dans la mécanique
classique les observables comme l’énergie, position et moment angulaire sont des fonctions dans
l’espace de phase du système, mais aprés Heisenberg les observables sont des opérateurs dans
l’espace de Hilbert nommé l’espace des états du système, alors l’algèbre commutative des fonc-
tions remplacée par l’algèbre non commutative des opérateurs nommée comme algèbre non
commutative.[3].
Le passage de la mécanique quantique à la la mécanique classique ou réciproquement est
trés difficile, donc la géomérie non-commutative fournit un langage dont permet de formuler ces
deux théorèmes et nous pourrions qualifier le passage de la théorie classique des champs à la
théorie quantique, ou le passage de la mécanique classique à la mécanique quantique.
La géométrie non commutative permet de considérer sur un pied d’égalité des objets discrets et
des objets continus, et fournit de très intéressants modèles pour la physique[4].
Notre objectif est la quantification de la gravitation, Pour arriver à cette fin nous avons pris
comme point de départ les questionnements suivant : quel est le formalisme des lois classiques
dans l’espace courbure ? et comment quantifier la gravitation ?.
La quantification des grandeurs physiques dans la mécanique quantique ne dépend pas de l’es-
pace, mais la gravitation relie à la courbure de l’espace-temps, c’est-à-dire elle représente un
espace lui même ; pour quantifier la gravitation il faut quantifier l’espace. Pour cela nous in-
troduisons une algèbre comme l’algèbre de l’espace de phase qui décrit les systèmes physiques.
11
L’algèbre de cet espace c’est la géométrie non-commutative où les points ne commutent pas
relient entre eux par un paramètre semblable à ~ "constante de Planck" qui est θ.
Notre recherche sera axée sur cinq chapitres, le premier chapitre est une introduction gé-
nérale sur notre sujet, le deuxième chapitre exposera un rappel sur la théorie de la relati-
vité générale, le troisième chapitre s’occupera de l’équation d’Einstein et sa simple solution de
schwarzschild, le quatrième chapitre sera un traitement du formalisme mathématique sur l’es-
pace non-commutative.
Le dérnier chapitre est une conclusion générale de notre travail de recherche et qui fera le point
sur les résultats que nous allons trouver. 1
1. Dans ce mémoire nous allons prend ~ = G = c = 1.
12
Chapitre 2
Introduction à la relativité générale
2.1 Introduction
La théorie restreinte traite tout les phénomènes naturels dans les référentiels galiléens et
n’introduit pas la gravitation dans ces études, ce qui donne des limitations à cette théorie et
devient incompatible avec la théorie de la gravitation de Newton.
Pour trouver une déscription correcte à la gravitation ; A.Einstein construisait la théorie de re-
lativité générale, qui étudie les évènements dans les référentiels non galilèens, avec l’application
de la gravitation et tout ce qui est produit au changement de la vitesse et de la direction du
mouvement.[5]
Le père de cette théorie comprit qu’il n’était pas possible d’inclure les phénomènes gravitation-
nels dans le cadre de la relativité reistreinte, comme il a disait :«...je ne traiterai plus dès lors
le problème de la gravitation dans le cadre de la théorie de la relativité reistreinte, car ce cadre
ne correspond absolement pas à la propriété fondamentale de la gravitation.... »[2]
Donc il parvint à une telle théorie dans laquelle la gravitation est en codée dans la géométrie
de l’espace-temps.
Avant d’expliquer plus sur la nouvelle théorie de la gravitation, nous allons faire une petite
comparaison entre la gravité de Newton, et celle d’Einstein.
13
2.2 Comparaison entre la théorie de gravitation de Newton
et d’Einstein
2.2.1 Différence de la théorie Newtoniènne de gravitation à celle d’Ein-
stein
Dans la théorie de Newton, les masses sont en attraction à cause de la force de gravité, alors
les corps sont en mouvement comme une conséquence de cette force agissait sur eux, selon la
loi de mouvement de Newton.
La force d’attraction s’exerce entre deux masses est proportionnelle à leur produit et inversement
proportionnelle au carré de la distance qui sépare leur centre de masses ; selon la relation :
F = Gm1m2
r2(2.2.1)
où
- G : c’est la constante Newtoniènne de la gravitation, et égale à 6.67× 10−11N.m2.Kg−2.
-m1, m2 les masses des corps 1 et 2. et r, la distance entre les corps m1 et m2.
Cependant, à la théorie d’Einstein les corps sont en mouvement à cause de la courbure de
l’espace-temps, qui est maximum près de masse, et nul à distance ce qui implique que les
masses mouvent dans des chemins droites.
Les effets gravitationnel de masse sur l’espace-temps, et sa réponse à ces éffets exprime la
géométrie de l’espace-temps. L’idée de Newton d’attraction entre les masses remplacée par
l’idée que la graviitation est une conséquence de la courbure de l’espace-temps, ce qui induise
les masses de produire la courbure de l’espace-temps et la courbure détermine le mouvement
des masses .
On peut résumer cette idée par la paraphrase de "John Weeler" (Space time tells matter how
to move, and matter tells space time how to curve.)[6]
À partir de la relation d’Einstein E = mc2 ; la masse c’est l’energie alors, n’est pas seulement
la masse cause la courbure de l’espace-temps mais l’énergie aussi .
14

2.2.2 Théorie de Newton comme une limite de théorie d’Einstein
La théorie de Newton n’est pas faute, elle représente une approximation exacte de celle
d’Einstein, cette limite peut définir comme :
- La courbure d’espace-temps est nulle.
- Les vitesses des corps sont trés petite devant celle de la lumière.
- Le champ gravitationnel est faible, et statique [7].
2.3 Les postulats de la relativité générale :
La relativité générale comme s’appelle théorie d’Einsteine ; c’est une théorie moderne de
l’espace-temps et de la gravitation, elle permet de concilier deux différentes théorèmes impor-
tantes, celle de la gravitation Newtoniènne et celle de la relativité restreinte.
Cette théorie est complémentaire de la théorie de relativité restreinte, elle est basée sur quelques
idées principales s’appellant les postulats, ils sont comme suit [8] :
Postulat n0 1 :
L’espace temps est une variété différentiable à 4 dimensions munie d’une métrique g.
i.e L’espace-temps c’est une combinaison à 4D de l’espace et de temps, cet entité porte trois
dimensions spatiale plus une dimension temporelle.
Chaque espace-temps est caractériser par un métrique propre, ce dérnier par exemple dans
l’espace Minkowskièn peut définir comme le produit scalaire de deux vecteurs de base ;
g(~eα;~eβ) = ηαβ = gαβ (2.3.1)
Cette métrique peut écrire sous forme une matrice ;
gαβ =
−1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
Postulat n0 2 :Principe d’équivalence
Pour toute région infiniment petite de l’espace temps (c’est-à-dire suffisamment petite que la
15
variation spatiale et temporelle de la gravitation peut être négligée), il existe un système de
coordonnées K0 = xα dans lequel la gravitation n’a aucune influence soit sur le mouvement
des particules soit sur tout autre processus physique. En particulier, les lois qui décrivent les
processus physiques au moyen de la relativité restreinte sont valables dans ce système .
Les différents systèmes de coordonnées k0 seront reliés entre eux par une transformation de
Lorentz. on les appelle des référentiels d’inertie locaux.
i.e En tout point de l’espace-temps il est possible de choisir un système de coordonnées loca-
lement inertièl qui soit tel que dans une région suffisament petite, les lois de la nature prennent
la même forme que dans un référentièl Galilièen.
Ou on peut dire que, dans n’importe quelle région localisée de l’espace-temps on peut trou-
ver un système de référence dans lequel les forces de gravitation sont nulles, alors la masse
gravitationnelle égale à la masse d’inertie.[5](voir annexe B).
Postulat n0 3 :
Le mouvement d’une particule qui ne subit aucune autre force que la gravitation est une ligne
géodésique.
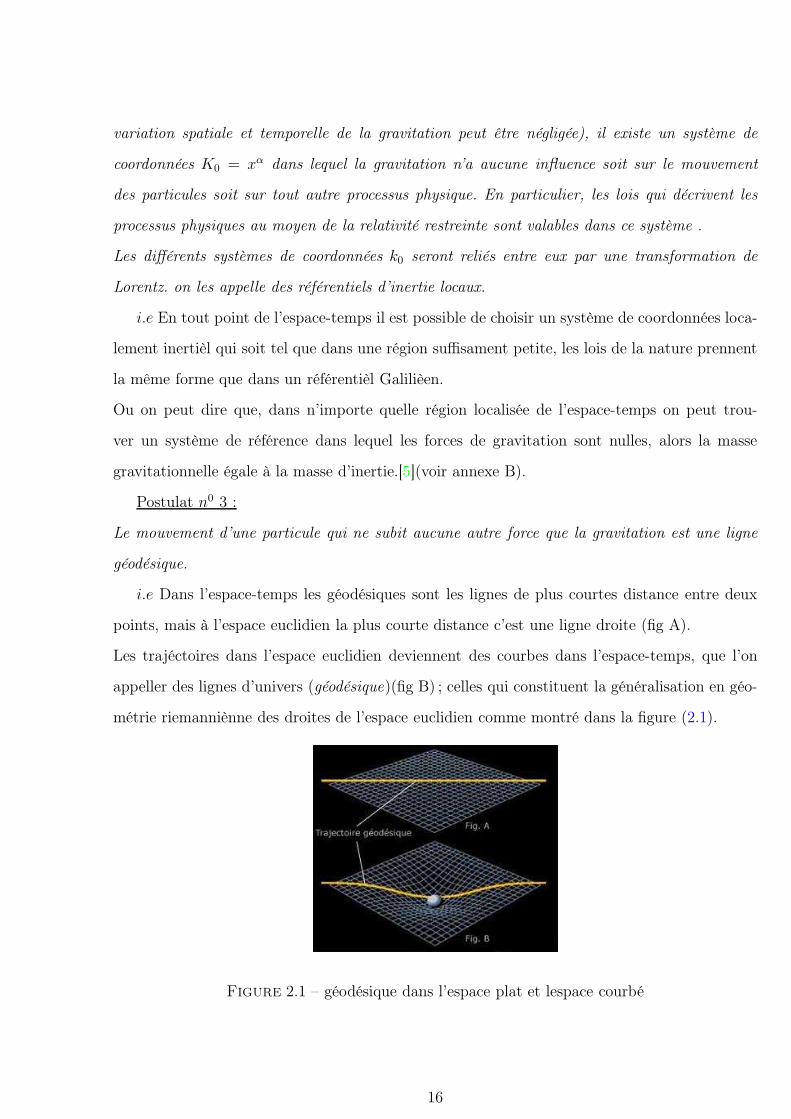
i.e Dans l’espace-temps les géodésiques sont les lignes de plus courtes distance entre deux
points, mais à l’espace euclidien la plus courte distance c’est une ligne droite (fig A).
Les trajéctoires dans l’espace euclidien deviennent des courbes dans l’espace-temps, que l’on
appeller des lignes d’univers (géodésique)(fig B) ; celles qui constituent la généralisation en géo-
métrie riemanniènne des droites de l’espace euclidien comme montré dans la figure (2.1).
Figure 2.1 – géodésique dans l’espace plat et lespace courbé
16
Postulat n0 4 : Principe de covariance
Tous les observateurs sont équivalents. Les équations de la physique devraient avoir une forme
tensorielle.
i.e En mécanique classique on a ∇Φ(vecteur) devient Γ, alors les éléments de la métrique
gαβ joue le rôle de potentièl Φ (scalaire).
Postulat n0 5 : Principe du couplage gravitationnel minimal.
Remplacer dans les équations de la relativité restreinte.
1. ηαβ → gαβ,
2. ∂α → ∇α,
3. ne pas ajouter de termes contenant explicitement la courbure.
i.e -∂α = ∂∂xα désigne la dérivée partièlle par rapport à la coordonnée xα dans l’espace
euclidien.
-∇α c’est la dérivée covariante dans l’espace courbé ; ∇α = ∂α + Γλµν .
où Γλµν sont les symboles de christoffel. (voir plus tard).
Postulat n0 6 : Principe de correspondance
Retrouver la théorie de Newton comme une limite de la théorie générale.
i.e La nouvelle théorie (relativité générale) se réduit à la théorie du gravitation de Newton ;
si on utilise la limite Newtoniènne.
2.4 Formalisme mathématique
La physique suit dans un premier temps les mathématiques : le domaine du certain est roi ;
les équations différentielles montrent la nécessité d’une compréhension globale de l’espace et
donne naissance à la géométrie différentielle.
2.4.1 Équation de géodésique
D’aprés le principe d’équivalence, il existe un système de coordonnées ξα dans lequel la
particule se meut comme une particule libre (pas de champ gravitationnel) :
d2ξα
dt2= 0. (2.4.1)
17

avec ; dt2 = ηαβdξαdξβ.
On peut définir au voisinage de point ξα la fonction ξα = ξα(xµ).
Aprés la dérivation de l’équation (2.4.1) on trouve
∂2ξα
∂xν∂xµ
dxν
dτ
dxµ
dτ+
∂ξα
∂xµ
d2xµ
dτ 2= 0 (2.4.2)
On multiplie par ∂xλ/∂ξα on obtient :
d2xλ
dτ 2+
∂xλ
∂ξα∂2ξα
∂xµ∂xµ
︸ ︷︷ ︸
Γλµν
dxµ
dτ
dxν
dτ= 0 (2.4.3)
Alors l’équation de géodésique c’est :
d2xλ
dt2+ Γλ
µν
dxµ
dt
dxν
dt= 0; (2.4.4)
où les quantités Γλµν appelés les coefficients de Christoffel.
L’équation de géodésique ramène à la notion de ligne droite en espace euclidien, si les coef-
ficients de Christoffel sont nuls, et l’équation (2.4.4) devient :
∂2xλ
dt2= 0; (2.4.5)
ce qui correspond à celle d’une droite.
2.4.2 Les symboles de Christoffel
Les symboles de Christoffel contient des informations sur la géométrie de l’espace-temps, ils
sont calculés en chaque point à partir des composantes de la métrique gµν selon la relation :
Γλµν =
1
2gλσ(∂µgνσ + ∂νgµσ − ∂σgµν) (2.4.6)
et gλσ désigne la matrice inverse de gλσ avec ; gµσgσν = δµν (δµν : Delta Chronecker égale à 1 si
µ = ν ou 0 sinon.)
Ces coefficients possèdent deux propriétés principales :
1. Ils sont symétriques ; Γλµν = Γλ
νµ, car la métrique gµν est symétrique ; gµν = gνµ.
2. Ils sont nuls dans un référentièl inertièl (espace local), puisque les composantes de mé-
trique gµν sont des constantes.
Les connexions de Christoffel ne sont pas des tenseurs, malgrés ses notations [9].
18

2.4.3 Tenseur de courbure
Le tenseur de courbure est un tenseur de type(13
), il est résponsable de la description math
ématique du champ gravitationnel de l’espace-temps.
Ce tenseur permet d’exprimer le commutateur de deux dérivées covariantes d’un vecteur cova-
riante :
Rαβµν(vβ) = [∇µ,∇ν](vβ). (2.4.7)
Si Rαβµν(vβ) = [∇µ,∇ν ](vβ) = 0 ; la géométrie riemanniene de l’espace-temps devient euclidien
(espace plat).
À partir de cet commutateur on peut décrit le tenseur de courbure par la relation :
Rαβµν = ∂µΓ
αβν − ∂νΓ
αβµ + Γα
σµΓασν − Γα
σνΓσβµ. (2.4.8)
On définit le tenseur de courbure complètement covariante ;
Rαβµν = gαλRλβµν ; (2.4.9)
Ce tenseur appelé aussi tenseur de Riemann, il a caractérisé par les quatre propriétés prin-
cipales suivantes :[10]
1. Antisymétrique dans ces deux premiers indices : Rαβµν = −Rβαµν .
2. L’antisymétrie des deux dérniers indices : Rαβµν = −Rαβνµ.
3. La symétrie par permutation des premier et deuxième paires d’indices : Rαβµν = Rβανµ.
4. Une symétrie cyclique sur les trois dérniers indices : Rαβµν +Rα
µνβ +Rανβµ = 0.
Alors la dérivée covariante de tenseur de Riemann vérifiée une identité trés importante,
appelée identité de Bianchi :
∇ρRαβµν +∇µR
αβνρ +∇νR
αβρµ = 0. (2.4.10)
2.4.4 Tenseur de Ricci
Le tenseur de Ricci est un tenseur du type(02
), obtenu par simple contraction du premier et
troisième indice du tenseur de Riemann, tel que[11] :
Rαβ = Rσασβ . (2.4.11)
19

Au contraire de tenseur de Riemann, le tenseur de Ricci est symétrique ; Rαβ = Rβα.
L’expression de tenseur de Ricci en fonction des symboles de Christoffel, s’écrit comme :
Rαβ = Rσασβ = ∂µΓ
µαβ − ∂βΓ
µαµ + Γµ
αβΓνµν − Γν
αµΓµνβ. (2.4.12)
Nous pouvons définir le tenseur de Ricci contravariante ;
Rµν = gµαgνβRαβ (2.4.13)
et le tenseur mixte ;
Rµν = gµαRαν (2.4.14)
Par la contraction sur tous les indices de tenseur de courbure, on obtient le scalaire de courbure
qui définit de la façon suivante :
R = gµνRµν = gλσgµνRλµσν (2.4.15)
2.4.5 Tenseur d’Einstein
Le tenseur d’Einstein peut retrouver par une simple démonstration utilisant l’identité de
Bianchi, alors à partir de la relation (2.4.10) de Bianchi, en contractant sur les indices α ,µ et
on utilise la définition du tenseur de Ricci (2.4.11) on trouve[12] :
∇ρR− 2gβν∇νRβρ = 0 (2.4.16)
En multipliant cette équation par −(1/2), avec l’utilisation de propriété de symétrie de tenseur
de Ricci , il vient au final à :
∇β[Rβα − 1
2Rgαβ] = 0. (2.4.17)
où le tenseur
Gαβ = Rβα − 1
2Rgαβ (2.4.18)
s’appelle le tenseur d’Einstein.(voir annexe A)
2.4.6 Tenseur d’énergie-impulsion
Le tenseur d’énergie-impulsion noté T est un tenseur de forme bilinéaire(02
)permet de
représenter la répartition de masse et de l’énergie dans l’espace-temps, il décrit le contenu en
20

matière de l’espace-temps ce qui laisse possède une grande importance en relativité générale.
Si la matière modélisée comme un fluide parfait de densité ρ et de pression p, alors on a :[13]
T = (p+ ρ)u⊗ u− pg (2.4.19)
ou bien
Tαβ = (p+ ρ)uαuβ − pgαβ (2.4.20)
donc
T αβ u
β = ((p+ ρ)uαuβ − pδαβ )uβ
= (p+ ρ)uα − puα
= ρuα (2.4.21)
et aussi
Tαβuαuβ = ρ (2.4.22)
où uα = dxα/dτ c’est la quadri-vitesse du fluide.
Cette valeure indique que les quantité représentées par ce tenseur se conservent ; (div T = 0),
et la divergence ici soit classique si l’espace plat, ou couvariante (∇αTαβ = 0) si l’espace courbé.
2.5 conclusion
Dans ce chapitre nous avons introduit premièrement ; une petite comparaison entre les deux
théories de gravité, celle de Newton et d’Einstein, puis un nombre d’idées de base conduisant aux
hypothèses qui va être utilisé pour poser les fondements de la relativité générale, et enfin nous
avons voire les outils fondamentaux nécessaires a la comprehension de la relatevite générale.
21
Chapitre 3
L’équation d’Einstein
3.1 Introduction
Les équations de champ d’Einstein sont la généralisation relativiste de la loi de Newton de la
gravitation . La vision d’Einstein, fondée sur l’égalité des masses d’inertie et de la gravitation,
et qu’il n’y a pas de force gravitationnelle du tout.
Dans ce chapitre nous allons intéresser par la solution d’équation d’Einstein, spécialement à la
plus simple solution qui est celle de Schwarzschild.
Avant d’entrer dans les détails de calculs nous devons faire un démonstration de l’équation
d’Einstein.
3.2 L’équation d’Einstein
Dans la théorie Newtonienne "l’espace euclidien", la source de champ gravitationnel c’est la
densité de masse qui vérifie l’équation de poisson suivante :
∆Φ = 4πGρ. (3.2.1)
Pour généraliser cette équation dans la théorie de l’espace courbe, on utilise l’algèbre tensorièl
"postulat n 04", le chois évident pour la source c’est le tenseur d’énergie impulsion, et ∆Φ
remplacé par le tenseur Gµν puisque le principe qui sous-tend l’équation d’Einstein consiste à
écrire une relation entre la géométrie de l’espace-temps et l’énergie-impulsion, donc l’équation
22

devrait être de la forme :
Gµν = KTµν . (3.2.2)
D’aprés la conservation de Tµν ⇒ ∇µTµν = 0 alors :
∇µGµν = 0. (3.2.3)
et nous avons dfini le tenseur d’Einstein comme :
Gµν = Rµν −1
2gµνR. (3.2.4)
donc il ya une égalité entre (3.2.2) et (3.2.4) comme ;
Rµν −1
2gµνR = KTµν . (3.2.5)
Notez que les deux parties en dérivées covariantes nulle.
Nous pouvons écrire l’équation 3.2.5 dans une autre forme ; on multipliant par gµν ;
gµν(
Rµν −1
2gµνR
)
= gµν(KTµν). (3.2.6)
On a gµνgµν = δµµ = 4, alors l’équation (3.2.5) devient :
R = −KT. (3.2.7)
Nous avons écrit le scalaire de Ricci en termes de la trace de tenseur d’énergie-impultion, par
conséquent nous pouvons écrit l’équation d’Einstein comme :
Rµν = K
(
Tµν −1
2gµνT
)
(3.2.8)
Cette équation représente l’équation fondamentale de la reltivité générale car elle détermine le
tenseur métrique g en fonction du contenu en énergie-impulsion de l’espace-temps.
Maintenant il faut détérminer la constante K, pour cela nous utiliserons la limite Newtonienne.
3.3 la limite Newtonienne
En théorie de Newton les équations des mouvements des particules dans un potentiel gravi-
tationnel φ s’écrivent : ∂2x/∂t2 = −∇φ.
Il doit vérifier : φ ≪ c2 si c = 1 → φ ≪ 1.
23

En relativité générale la faiblesse du champ gravitationnel nous autorise à écrire la métrique
sous la forme Minkowskienne entachée d’une petite perturbation (hµν ≪ 1)[10].
gµν = ηµν + hµν +O(h2). (3.3.1)
Par définition la métrique inverse gµν telle que gµνgνα = δνα au premier ordre de h, qui nous
donne
gµν = ηµν − hµν . (3.3.2)
Où hµν = ηµαηνβhµν
Nous allons écrire les équations des mouvements en gardant les termes de premier ordre avec
une petite perturbation, c’est-à-dire nous allons négliger les terme (hiµνv
i).
Les symboles de Christoffel devient au 1er ordre comme suit :
Γµνα =
1
2gµλ(∂νgλα + ∂αgνλ − ∂λgνα)
=1
2ηµλ(∂νhλα + ∂αhνλ − ∂λhνα) +O(h2). (3.3.3)
L’équation de géodésique c’est :
d2xµ
ds2+ Γµ
αβ
dxα
ds
dxβ
ds= 0. (3.3.4)
pour µ = 0
d2x0
ds2+ Γ0
αβ
dxα
ds
dxβ
ds= 0. (3.3.5)
d2t
ds2+ Γ0
00
(dt
ds
)2
+ 2Γ00i
dt
ds
dxi
ds+ Γ0
ij
dxi
ds
dxj
ds= 0 (3.3.6)
Le champs statique implique que : ∂0gµν = ∂0hµν = 0 ⇒ Γ000(
dtds)2 = 0.
Multiplions par dt/dt on trouve :
d2t
ds2+ 2Γ0
0i
(dt
ds
)2
vi + Γ0ijv
ivj(dt
ds
)2
= 0 (3.3.7)
et les termes : 2Γ00i
(dtds
)2vi + Γ0
ijvivj(dtds
)2sont négligés.
L’équation (3.3.7) se transforme à :d2t
ds2= 0 (3.3.8)
ceci indique que dt/ds est constante .
Pour µ = i
d2xi
ds2+ Γi
να
dxν
ds
dxα
ds= 0 (3.3.9)
24
d2x
ds2+ Γi
00
(dt
ds
)2
+ 2Γi0j
dt
ds
dxj
ds+ Γi
ik
dxj
ds
dxk
ds= 0 (3.3.10)
Nous multiplions par (dt/dt)2 nous obtenons ;
d2xi
ds2+ Γi
00 + 2Γi0jv
j + Γiikv
jvk = 0 (3.3.11)
Les termes 2Γi0jv
j + Γiikv
jvk sont négligées, alors (3.3.11) devient :
d2xi
ds2+ Γi
00 = 0. (3.3.12)
Calculer Γi00
Comme le champ est statique les symboles de Christoffel concernent Γi00 se simplifient
Γi00 = −1
2ηij∂jh00. (3.3.13)
on a ηii = −1 alors :d2xi
ds2+
1
2∂ih00 = 0. (3.3.14)
Ecrire cela comme une équation véctorielle
d2xi
ds2= −1
2∇h00. (3.3.15)
Rappeler l’équation Newtonienne :
d2xi
ds2= −∇Φ(x). (3.3.16)
Le potentiel gravitationnel Φ à une distance r du centre d’un corps sphérique, de masse M prend
la forme Φ = −GM/r
Nous comparons (3.3.15) avec (3.3.16) Nous concluons que :
− 1
2∇h00 = −∇Φ(x). (3.3.17)
Alors :
h00 = 2Φ. (3.3.18)
Comme la métrique est juste g00 = η00 + h00
Puis :g00 = 1 + 2Φ ⇒
Φ =1
2(g00 − 1). (3.3.19)
25

Maintenant nous allons calculer le tenseur de Riemann ;
Ri0j0 = ∂jΓ
i00 − ∂0Γ
ij0 + Γi
jλΓλ00 − Γi
0λΓλj0. (3.3.20)
Le 2eme terme est un dérivé par rapport au temps qui est nul pour le champ statique, le 3eme et
4eme sont d’ordre supérieurs et peuvent être négligés, il nous reste :
Ri0j0 = ∂jΓ
j00. (3.3.21)
R00 = Ri0j0.
= ∂i(−1
2∂jh00).
= −1
2∆h00. (3.3.22)
On a h00 = 2Φ alors :
R00 = ∆Φ. (3.3.23)
D’autre part dans l’équation d’Einstein ;
R00 = K
(
T00 −1
2g00T
)
. (3.3.24)
on a
g00T = (η00 + h00)(η00 − h00)T00.
= (η00η00 − η00h
00 + η00h00 − h00h00)T00.
= T00. (3.3.25)
L’équation (3.3.24) devient :
R00 = K
(
T00 −1
2T00
)
=1
2K T00
=1
2Kρ. (3.3.26)
alors l’équation (3.3.23) s’écrit comme suit
∇2Φ =1
2Kρ
Nous avons l’équation de Poisson (3.2.1) ce qui implique que : 12Kρ = 4πGρ. donc :
K = 8πG. (3.3.27)
26
Par conséquence l’équation d’Einstein devient :
Rµν −1
2gµνR = 8πGTµν . (3.3.28)
Cette équation décrit la relation entre la géométrie et le tenseur d’énergie-impulsion via :
Gµν = 8πGTµν (3.3.29)
avec Gµν = Rµν − 12gµνR.
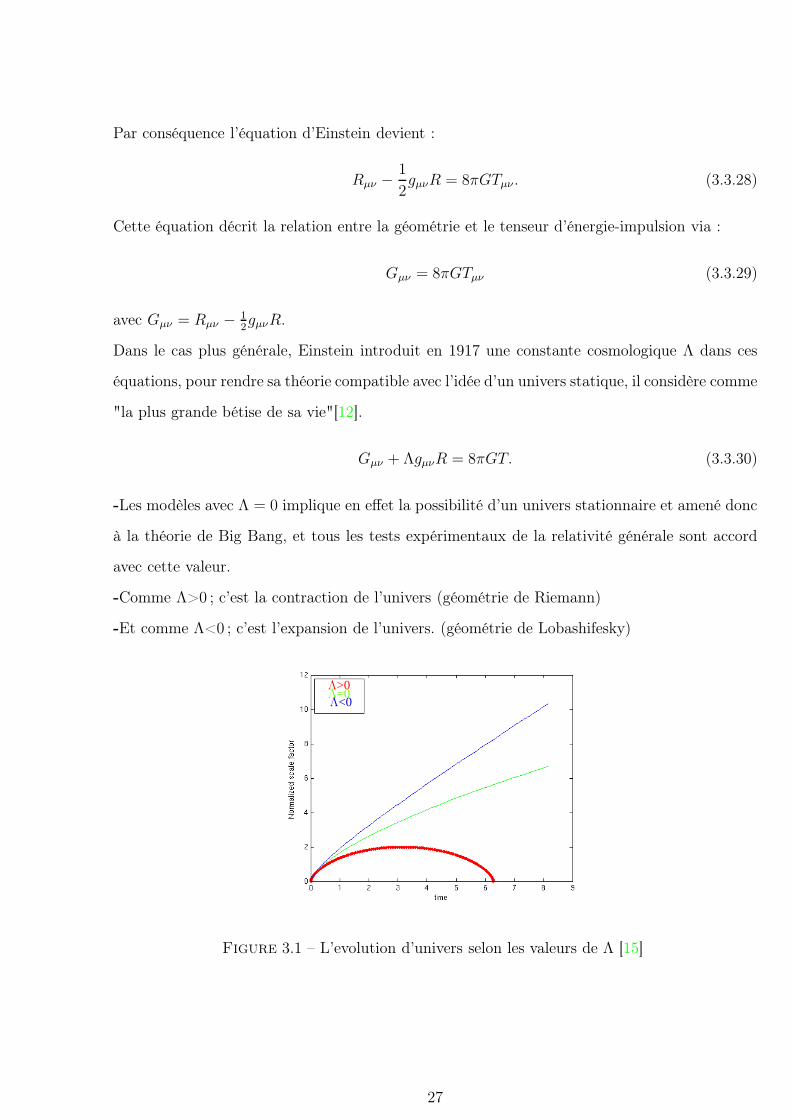
Dans le cas plus générale, Einstein introduit en 1917 une constante cosmologique Λ dans ces
équations, pour rendre sa théorie compatible avec l’idée d’un univers statique, il considère comme
"la plus grande bétise de sa vie"[12].
Gµν + ΛgµνR = 8πGT. (3.3.30)
-Les modèles avec Λ = 0 implique en effet la possibilité d’un univers stationnaire et amené donc
à la théorie de Big Bang, et tous les tests expérimentaux de la relativité générale sont accord
avec cette valeur.
-Comme Λ>0 ; c’est la contraction de l’univers (géométrie de Riemann)
-Et comme Λ<0 ; c’est l’expansion de l’univers. (géométrie de Lobashifesky)
Λ>0Λ=0Λ<0
Figure 3.1 – L’evolution d’univers selon les valeurs de Λ [15]
27
L’équation d’Einstein est une équation compliquée et difficile à résoudre, parce qu’elle est
un ensemble d’équations non linéaires, aux dérivés partiels du seconde ordre, À la limite New-
tonnienne, elle se réduit à l’équation de Poisson (3.2.1) qui relie le potentiel gravitationnel à la
densité de masse.
Cette équation relie la géométrie de l’espace-temps à l’énergie et à la matière, la présence de
la matière ou d’énergie induise à une modification de la géométrie de l’espace-temps comme
indiqué l’image de figure (3.2).
Ainsi la gravitation s’explique simplement par le fait que, les trajéctoires suivent la géométrie
courbée par la matière ou l’énergie. La gravitation c’est une force fondamentale comme les trois
autres forces, sa particularité est d’être expliquer géométriquement.
Figure 3.2 – L’effet de la matière sur la géométrie de l’espace-temps [16]
Pour le moment nous intéressons à la plus simple solution de l’équation (3.3.28), c’est-à-dire
dans le vide (Tµν = 0) et où (Λ = 0) ; ça nous conduit à la solution de Schwarzschild.
3.4 la solution de Schwarzchild
Les équations de champ sous vide décrivent la structure métrique de l’espace vide entourant
d’un corps massif. Lors de l’examen de l’espace vide où aucune matière ou d’énergie est présent,
nous avons mis Tµν = 0. dans ce cas, la solution de Schwarzchild est une première exacte solution
et très importante pour l’équation d’Einstein dans le vide qui donne
Rµν = 0 (3.4.1)
28

Cette solution est un métrique qui doit vérifier ces conditions :
solution statique et à symétrie sphérique telque ;
- un tenseur métrique statique veut dire :
1. La dépendance en temps est nulle c’est-à-dire "stationnaire", pour les composantes de la
métrique.
∂tgµν = 0 (3.4.2)
2. L’élément de longueur ne change pas sous la transformation t → −t :
ds2(t) = ds2(−t). (3.4.3)
et - la métrique à symétrie sphérique implique que les composantes de la métrique sont
inchangeable lors d’une rotation θ → −θ et φ → −φ.
Maintenant nous sommes en train de faire la solution d’équation (3.3.28)[14].
Choisissons un système de coordonnées (t, r, θ, φ) où r est un variable radiale (0 < r < ∞),
θ, φ les deux variables angulaires 0 ≤ θ ≤ π et 0 ≤ φ < 2π.
Le système est à symétrie sphérique, la métrique doit être indépendante des variables angulaires
θ et φ, (∂θgµν = ∂φgµν = 0) ,de sorte que la métrique ne peut dépendre du temps et de la direc-
tion radiale gµν = gµν(t, r).
La symétrie sphérique implique que le système est invariant par un changement de la variable
angulaire θ → π − θ ou bien φ → 2π − φ .
φ → 2π − φ
ds2 = gijdxidxj + 2giθdx
idxθ + gθθdθ2 → gijdx
idxj − 2giθdxidxθ + gθθdθ
2 (3.4.4)
ou i, j = (t, r, φ), le terme 2giθdxidxθ avec i 6= θ est pas invariant par ce changement, et devrait
donc giθ = 0.
De la même façon pour φ → 2π − φ, giθ = 0 ∀ i 6= φ
La solution est statique, alors en peut supprimer la dépendance de t on g0i = 0
La métrique dans une symétrie sphérique peut donc être coule sous forme :
ds2 = g00dt2 + grrdr
2 + r2a(r)dθ2 + r2b(r)dφ2 (3.4.5)
29

— pour :(t, r, φ) fixes et dθ = ǫ → ds2 = r2a(r)ǫ2.
— Pour :(t,r) fixes mais θ = π/2 et φ = ε → ds2 = r2b(r)ǫ2.
ce qui donne a(r) = b(r)
Nous avons aussi t et r fixes sur un sphère à deux dimensions et ds2 = r2(dθ2 + sin2θdφ2)
donc a(r) = b(r) = 1
Nous avons montré que la métrique la plus générale que nous devons considérer est :
ds2 = −f(r)dt2 + h(r)dr2 + r2(dθ2 + sin2(θ)dφ2.) (3.4.6)
i.e
gµν =
g00 0 0 0
0 grr 0 0
0 0 gθθ 0
0 0 0 gφφ
→ gµν =
−f(r) 0 0 0
0 h(r) 0 0
0 0 r2 0
0 0 0 r2 sin2 θ
La matrice da la métrique inverse est : gµν =
− 1f(r)
0 0 0
0 1h(r)
0 0
0 0 1r2
0
0 0 0 1r2sin2 θ
Pour détérminer les valeurs de f(r) et h(r), tout d’abord nous devrons calculer les différents
grandeurs suivants :
1. Les symboles de Christoffel non nuls :
Γrrr =
h′(r)2h(r)
(3.4.7)
Γrtt = − f ′(r)
2h(r)(3.4.8)
Γrθθ = − r
h(r)(3.4.9)
Γrφφ =
r
h(r)sin2(θ) (3.4.10)
Γttr = Γt
rt
f ′2f
(3.4.11)
Γθφφ = − sin(θ) cos(θ) (3.4.12)
30

Γθθr = Γθ
rθ =1
r(3.4.13)
Γφφr = Γφ
rφ =1
r(3.4.14)
Γφφθ = Γφ
θφ = cot(θ) (3.4.15)
2. Le tenseur du Ricci
R00 = ∂0Γλ0λ − ∂λΓ
λ00 + Γδ
0λΓλδ0 − Γδ
00Γλδλ (3.4.16)
= −f ′′2h
+f ′h′4h2
+f ′4hf
− f ′hr
(3.4.17)
Rrr =f ′′2f
− f ′24f 2
− h′f ′4hf
− h′hr
(3.4.18)
Rθθ = −1 +1
h− h′r
2h2+
rh′2hf
(3.4.19)
Rφφ = sin2(θ)Rθθ (3.4.20)
3. Le tenseur Scalaire
R = g00R00 + grrRrr + gθθRθθ + gφφRφφ (3.4.21)
=f ′′fh
− f ′22hf 2
− f ′h′2h2f
+2f ′rfh
− 2h′h2r
+2
hr2− 2
r2(3.4.22)
4. Le tenseur d’Einstein
G00 = R00 −1
2Rg00 (3.4.23)
G00 = − f
r2h
(
rh′h
+ h− 1
)
(3.4.24)
Grr = − 1
r2
(
rf ′f
− h+ 1
)
(3.4.25)
Gθθ =r(2)
h
(
−f ′′2f
+1
4
(f ′f
)2
− f ′h′4hf
− 1
2r
(f ′f
+h′h
))
(3.4.26)
Gφφ = sin(θ)Gθθ (3.4.27)
La solution dans l’espace vide c’est à dire le tenseur d’énergie-impulsion identiquement nul
Tµν = 0
Gµν = 8πGTµν (3.4.28)
Gµν = 0 (3.4.29)
G00 = 0 (3.4.30)
31

rh′h
+ h− 1 = 0 (3.4.31)
rf ′f
− h+ 1 = 0 (3.4.32)
− f ′′2f
+1
4
(f ′f
)2
− f ′h′4hf
− 1
2r
(f ′f
+h′h
)
= 0 (3.4.33)
Par la sommation des équations (3.4.31) et (3.4.32)
r
(h′h
+f ′f
)
= 0 (3.4.34)
h′h
+f ′f
= 0 (3.4.35)
ln(fh) = cte (3.4.36)
fh = cte (3.4.37)
On a r → ∞ l’espace plat
ds2 = −f(r)dt2 + h(r)dr2 + r2(dθ2 + sin2(θ)dφ2
)(3.4.38)
r → ∞ la solution asymptotiquement Minkowskienne
ds2 = −dt2 + dr2 + r2(dθ2 + sin2(θ)dφ2
)(3.4.39)
h et f → 1 cte = 1
Alors :h = 1/f
Donc nous reportons ces résultats dans l’équations (3.4.32) elle vient :
rf ′f
+ 1− 1
f= 0
rf ′+ f − 1 = 0
(rf)′ − 1 = 0
(rf)′ = 1
rf = r + cte
f = 1 +cte
r(3.4.40)
Afin de fixer la constante d’intégration nous utilisons la limite Newtonienne :
r → ∞ g00 = 1 + 2φ
= 1− 2GM
r(3.4.41)
32

⇒ cte = −2GM (3.4.42)
Alors :
f = 1− 2GM
r
h =1
1− 2GMr
(3.4.43)
ds2 = −(
1− 2M
r
)
dt2 +
(
1− 2M
r
)−1
dr2 + r2(dθ2 + sin2 θdφ2
)(3.4.44)
où r c’est le rayon de Schwarzschild.
Finalement cette équation (3.4.44) c’est la métrique de Schwarzschild ; "a été trouvé en 1916
par le physicien allemand Karl Schwarzschild qu’il servait sur le front russe pendant la première
guerre mondiale" qui définit la façon dont nous mesurons les intervalles invariants autour d’une
masse M dans un espace-temps à symétrie sphérique et statique.
Par conséquent nous avons la métrique de Schwarzschild, nous pouvons trouver les équations
exactes de mouvement pour les objets dans un espace-temps décrit par ce métrique, par exemple
nous pouvons trouver des orbites autour d’une étoile ou d’un trou noir.
3.5 Représentation de la métrique de Schwarzschild
La métrique de Schwarzschild est symmétrique, sphérique et statique, donc on peut considère
un plan équatorial dans l’espace-temps à un moment spécifique de coordonnés t.
i.e : on considère une surface de 2-dimensions t = cst, θ = π2
dans l’espace-temps de l’équation
(3.4.44).
Alors l’élément de ligne ds2 dans cette surface équatorial est
ds2 =dr2
1− 2mr
+ r2dφ2. (3.5.1)
Nous cherchons à construire dans un espace euclidien à 3-dimensions une surface à 2-dimensions,
avec la même précision des deux géométries.
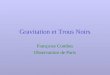
La figure (3.3) représente la métrique de Schwarzschild.
33

ϕx
yr
intérieur de trou noir extérieur de trou noir
z
Figure 3.3 – diagramme de la métrique de Schwarzschild dans l’espace-temps
Chaque cercle représente une sphère d’environ 2πr selon la métrique de Schwarzschild, la
distance mesuré au repos est plus grande que l’intervalle attendues dans un espace plat (géo-
métrie euclidiènne).
Comme r est trés grande la métrique devient plat.
comme M est petite, la métrique aussi plat (pas de courbure sans masse).
Les caractéristiques la plus importante dans ce diagramme c’est l’utilisations de l’effet de la
matière sur l’espace-temps, par exemple la distance entre la centre de la terre et cèrcle prés de
la surface de terre est supèrieure de environ/2π d’environ 1.5 mm (un nombre dont la petitesse
par rapport à rayon réel, 6.4× 108cm.)
Ce résultat représente la faiblesse de la courbure d’espace-temps.
Un autre exemple c’est trou noir, comme ce dérnier est trés lourd il cause un grande courbure
sur l’espace-temps.
3.6 conclusion
Dans cette partie nous sommes intéréssées aux formules fondamentales appelées équations
du champs de gravitation ; "équation d’Einstein", et ses solutions dans le vide avec la symétrie
sphérique et statique ; c’est-à-dire la métrique de Schwarzschild qui nous permet de trouver les
chemins des objets dans l’espace-temps puis sa représentation dans l’espace-temps.
34
Chapitre 4
La relativité générale dans l’espace-temps
non commutative
4.1 Introduction
La géométrie non-commutative est un cadre qui généralise la géométrie ordinaire, en mé-
canique classique les fonctions ordinaires ou les observables forment une algèbre commutative
où le produit de deux quantités algébriques ne dépend pas à l’ordre de terme, La mécanique
quantique enrichit de nouvelle propriété d’algèbre commutative des fonctions par une algèbre
non-commutative d’opérateurs qui ne commutent plus.
4.2 Thermodynamique de Schwarzschild de trous noirs
La relativité générale classique donne une idée sur les trous noirs ; dont lesquels n’émettent
aucune choses, alors leurs température est nulle.
Les trous noirs sont des objets célestes extraordinairement compact, forcee forme par l’implosion
du cœur des grosses etoiles à la fin de leurs vie.
En raison de leur immense force de gravité rien ne peut s’échapper d’un trou noir, même pas la
lumière, tout ce qui tombe dans un trou noir est coupé à jamais de notre univers, ils pourraient
même être des portes vers d’autres univers.
Cependant cette idée changée par Hawking quand il introduit la mécanique quantique ; sa vision
est la combinaison entre la gravité et la mécanique quantique ; Il a constaté que si aucune par-
35
ticule du champ quantique sont présents au début du temps, dans un temps avancé il détectera
un flux sortant de particules ayant le spèctre thermique, où le trou noir émet un spèctre qui est
l’analogue au spèctre d’un corps noir, donc il possède une température, ces dérniers caractérisés
par trois paramètres : masse, charge et moment angulaire[17] .
4.2.1 La température de Hawking :
La solution de Schwarzschild est statique et symétrie sphérique, la température de Hawking
TH est reliée à la gravitation de surface κ par la relation suivante[18] :
TH =κ
2π. (4.2.1)
où la gravitation de surface d’un trou noir est donnée par :
κ =1
2
(dg00dr
)
r=rh
, (4.2.2)
et
g00 = 1− 2M
r(4.2.3)
Pour calculer la température de Hawking nous remplaçons les équations (4.2.2) et (4.2.3) dans
(4.2.1) :
TH =1
2π
1
2
(
d(1− 2M
r
)
dr
)
r=rh
=1
2π
M
r2h. (4.2.4)
Où rh = 2M
4.3 l’espace-temps non commutative
La non commutativité de l’espace-temps est une option convaincante pour la description
d’espace-temps quantifiée et, il est important pour l’étude et de répondre à la question ultime
à propos de la nature quantique de l’espace-temps à des échelles de très haute énergie.
Pour simplifier les calculs nous utilisons le produit star, ce dérnier se définit en terme de la ma-
trice antysimétrique θµν qui paramètre le non commutativité de l’espace-temps de Minkowski[20].
36

[xµ, xν ] = xµ ⋆ xν − xν ⋆ xµ (4.3.1)
= iθµν . (4.3.2)
Le produit star de deux champs φ1(x) et φ2(x) est donné par :
φ1(µ) ∗ φ2(ν) = expa i2θµν∂µ∂ν φ1(µ) ∗ φ2(ν)
∣∣x1=x2=x
(4.3.3)
La non commutativé donne la relation d’incertitude
∆xµ∆xν ≥ 1
2θµν (4.3.4)
Dans la mécanique quantique non commutative les relations du commutation sont :
[xµ, xν ] = iθµν (4.3.5)
[xµ, pν] = iδµν (4.3.6)
[pµ, pν ] = 0 (4.3.7)
dans ce chapitre nous allons utilisé la relation :
[xµ, xν ] = iθµν (4.3.8)
Il suffit de remplacer les produits de fonction d’onde (ou les champs) par le produit star où le
produit de Moyal[21].
En utilisant le développement donnant le produit star :
V (x) ∗Ψ(x) = V (x)Ψ(x) + Σ∞
n=1(ı
2)n
1
n...θµnνn∂µ1
...∂µnV (x)θµ1ν1∂ν1 ...θ
µnνn∂νnΨ(x). (4.3.9)
nous avons la relation
∂νı = ıpνı. (4.3.10)
Alors :
V (x) ∗Ψ(x) = V (x)Ψ(x) + Σ∞
n=1
( ı
2
)n 1
n...θµnνn∂µ1
...∂µnV (x)θµ1ν1pν1 ...θ
µnνnpνnΨ(x). (4.3.11)
D’autre part en posant
θµıνıpνı = pµı . (4.3.12)
37

nous obtenons
V (x) ∗Ψ(x) = V (x)Ψ(x) + Σ∞
n=1
( ı
2
)n 1
n∂µ1
...∂µnV (x)pµ1 ...pµıΨx. (4.3.13)
nous prenons la transformée de Fourier de V (k) :
V (x) =
∫
dkeıkxV (k). (4.3.14)
Par la sommation sur n nous trouvons :
V (x) ∗Ψ(x) = V (x)Ψ(x) +
∫
Σ∞
n=1
(
− ı
2
)n 1
n(kp)ν
︸ ︷︷ ︸
(exp[− 1
2k.p]−1)
eıkxV (k)Ψ(x)dk. (4.3.15)
D’autre part∫
dk.exp[− ı
2k.p].exp[ıkx].V (k) = V (x− p
2). (4.3.16)
D’où
V (x) ∗Ψ(x) = V (x− p
2)Ψ(x). (4.3.17)
avec p = θıpx
la métrique de Schwarzschild dans l’espace non commutative
ds2 = −(
1− 2M√rr
)
dt2 +
(
1− 2M√rr
)−1
dr2 + rr(dθ2 + sin2 θdφ2
)(4.3.18)
avec le potentiel g00 donnée par
g00 = 1− rH√rr
(4.3.19)
Où r satisfait
xµ = xµ +1
2θµν pν (4.3.20)
pµ = pµ (4.3.21)
d’aprés les relations du commutation :
[xµ, xν ] = 0. (4.3.22)
[xµ, pν ] = ıδµν . (4.3.23)
[pµ, pν ] = 0. (4.3.24)
38

Maintenant nous allons calculer g00 [19]
g00 = 1− rH√rr
(4.3.25)
= 1− rH√
(xi − 12θıp)(xi − 1
2θıkpk)
= 1− rH√
r2 − xıθıp +14θıθıkppk
(4.3.26)
on a θı =12ǫıkθk, et ǫırǫıks = δrδrs − δsδrk, alors ;
θijpjθikpk =1
2ǫırθrpj
1
2ǫıksθspk
=1
4(ǫırǫıks)θrpjθspk
=1
4(δk δrs
︸︷︷︸
r=s
−δs δrk︸︷︷︸
r=k
)θrpjθspk
=1
4( δjk︸︷︷︸
j=k
θrpjθrpk − δs︸︷︷︸
j=s
θrpjθspr)
=1
4(θrpjθrpj − θrpjθjpr)
=1
4(θ2p2 − (θp)r(θp)j) (4.3.27)
nous pouvons écrire l’expression de g00 comme :
g00 = 1− rH√
r2 − 12ǫırθrxıp +
θ2p2−(~θ ~p)2
16
(4.3.28)
nous avons aussi les expressions suivantes : Lk = ǫırθrxıpj , ~L.~θ = Lzθ et ~p~θ = pzθ.
Alors ;
g00 = 1− rH√
r2 − ~L.~θ4
+ 116(p2 − p2z)θ
2
. (4.3.29)
et p2 = p2x + p2y + p2z ; ce qui implique que :
g00 = 1− 2M√
r2 − Lz .θ4
+ 116(p2x + p2y)θ
2. (4.3.30)
Le trou noir de schwarzschild est stationaire ; (~L = 0 ⇒ Lz = 0.)
Donc
g00 = 1− 2M√
r2 +(p2x+p2y)θ
2
16
(4.3.31)
39
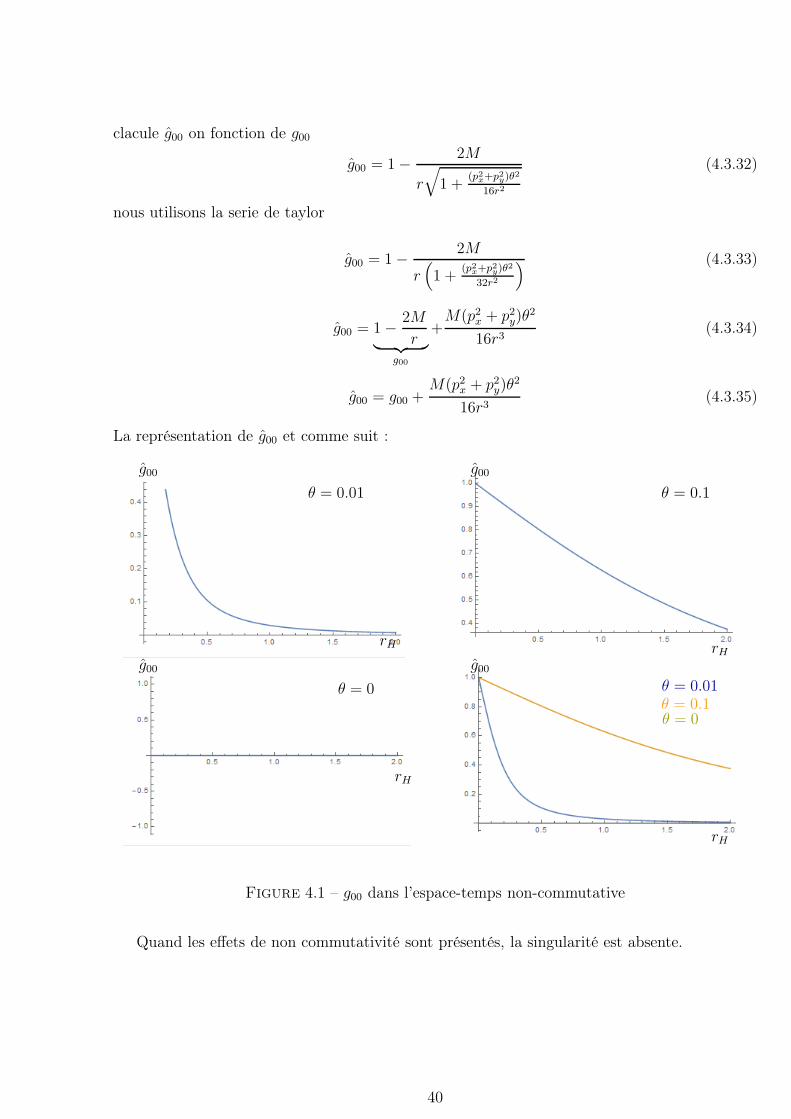
clacule g00 on fonction de g00
g00 = 1− 2M
r
√
1 +(p2x+p2y)θ
2
16r2
(4.3.32)
nous utilisons la serie de taylor
g00 = 1− 2M
r(
1 +(p2x+p2y)θ
2
32r2
) (4.3.33)
g00 = 1− 2M
r︸ ︷︷ ︸
g00
+M(p2x + p2y)θ
2
16r3(4.3.34)
g00 = g00 +M(p2x + p2y)θ
2
16r3(4.3.35)
La représentation de g00 et comme suit :
θ = 0.01 θ = 0.1
θ = 0
θ = 0θ = 0.1θ = 0.01
g00
g00g00
g00
rH
rH
rH
rH
Figure 4.1 – g00 dans l’espace-temps non-commutative
Quand les effets de non commutativité sont présentés, la singularité est absente.
40

4.3.1 Calcule de rH dans l’espace-temps non commutative
L’horizon de la métrique de Schwarzschild non commutative se satisfait comme toujours la
condition g00 = 0 qui mène à :
1− 2M√
r2h +(p2x+p2y)θ
2
16
= 0 (4.3.36)
2M =
√
r2H +(p2x + p2y)θ
2
16(4.3.37)
r2H = 4M2 −(p2x + p2y)θ
2
16(4.3.38)
rH = ±√
4M2 −(p2x + p2y)θ
2
16; (4.3.39)
comme rH représente le radius de trou noir alors ;
rH =
√
4M2 −(p2x + p2y)θ
2
16. (4.3.40)
calcule rH on fonction de rH
rH = 2M
√
1−(p2x + p2y)θ
2
64M2(4.3.41)
nous utilisons la série de Taylor nous trouvons :
rH = 2M
(
1−(p2x + p2y)θ
2
128M2
)
(4.3.42)
rH = 2M︸︷︷︸
rH
−(p2x + p2y)θ
2
128M2(4.3.43)
rH = rH −(p2x + p2y)θ
2
32r2H(4.3.44)
L’observation intéressée dans ce point c’est ; quand θ = 0, rH revient à rH .
4.3.2 Température non commutative de Hawking
Maintenant nous allons calculé la température de Hawking TH dans l’espace non commuta-
tive ; On a la relation :
TH =1
2π
1
2
(dg00dr
)
r=rH
(4.3.45)
nous allons calculer la dérivé de g00 par rapport à r d’aprés l’équation (4.3.31)
∂g00∂r
∣∣∣∣r=rH
=2Mr
(
r2 +(p2x+p2y)θ
2
16
)(√
r2 +(p2x+p2y)θ
2
16
)
∣∣∣∣∣∣∣∣r=rH
(4.3.46)
41
nous remplaçons r =
√
4M2 − (p2x+p2y)θ2
16, dans (4.3.46) ce qui nous donne
∂g00∂r
∣∣∣∣r=rH
=2M
√
4M2 − (p2x+p2y)θ2
16
4M2 − (p2x+p2y)θ2
16+
(p2x+p2y)θ2
16
√
4M2 − (p2x+p2y)θ2
16+
(p2x+p2y)θ2
16
(4.3.47)
Aprés la réduction nous trouvons :
∂g00∂r
=2M
√
4M2 − (p2x+p2yθ2)
16
4M2.2M(4.3.48)
∂g00∂r
=2M
√
1− (p2x+p2y)θ2
64M2
4M2(4.3.49)
Nous compensons ∂g00∂r
dans l’équation (4.3.45)
TH =1
4π
∂g00∂r
=M
8M2π
√
1−(p2x + p2y)θ
2
64M2
=M
2πr2H
√
1−(p2x + p2y)θ
2
64M2(4.3.50)
Par simplification de cette dérnière équation par le développement de Taylor, nous obtenons :
TH =M
2πr2H
(
1−(p2x + p2y)θ
2
128M2
)
(4.3.51)
TH =M
2πr2H︸ ︷︷ ︸
TH
−(p2x + p2y)θ
2
128M(4.3.52)
TH = TH −(p2x + p2y)θ
2
128M(4.3.53)
Donc ; le deuxième terme d’équation (4.3.53) indique l’effet de non-commutativité sur la tem-
pérature de Hawking.
42
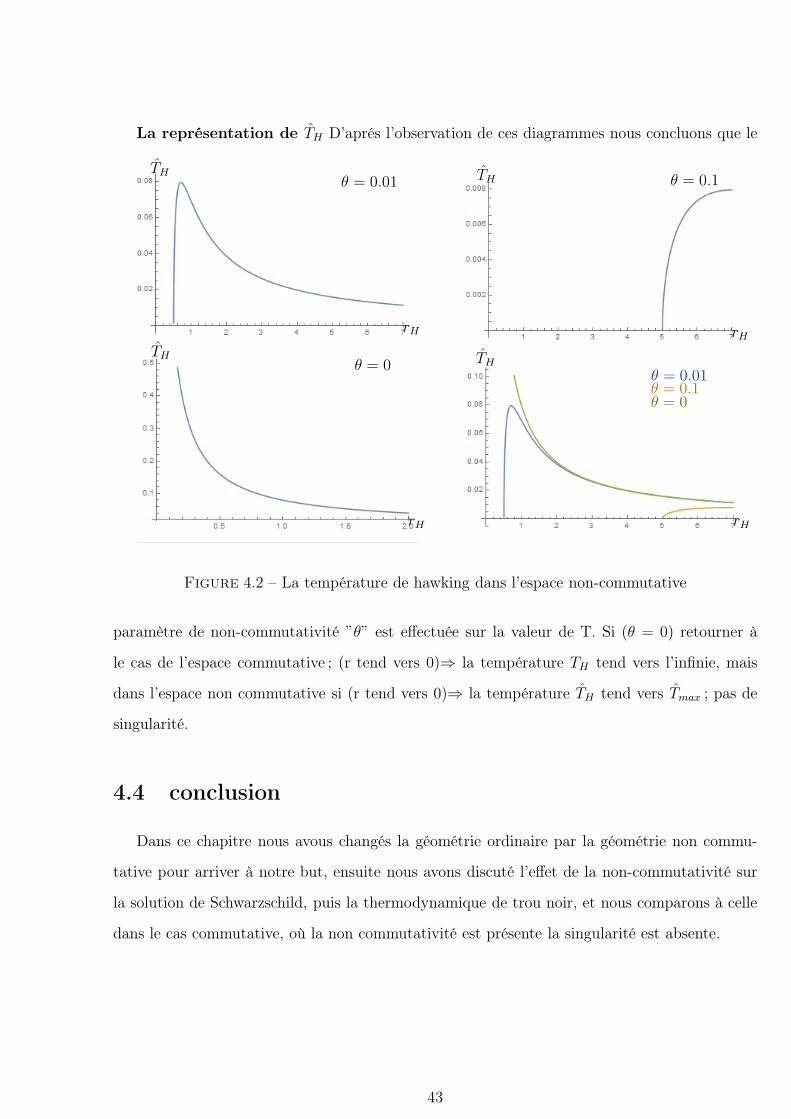
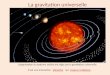
La représentation de TH D’aprés l’observation de ces diagrammes nous concluons que le
TH
TH TH
THθ = 0.01
θ = 0
θ = 0.1
θ = 0.01θ = 0.1θ = 0
rH
rH
rH
rH
Figure 4.2 – La température de hawking dans l’espace non-commutative
paramètre de non-commutativité ”θ” est effectuée sur la valeur de T. Si (θ = 0) retourner à
le cas de l’espace commutative ; (r tend vers 0)⇒ la température TH tend vers l’infinie, mais
dans l’espace non commutative si (r tend vers 0)⇒ la température TH tend vers Tmax ; pas de
singularité.
4.4 conclusion
Dans ce chapitre nous avous changés la géométrie ordinaire par la géométrie non commu-
tative pour arriver à notre but, ensuite nous avons discuté l’effet de la non-commutativité sur
la solution de Schwarzschild, puis la thermodynamique de trou noir, et nous comparons à celle
dans le cas commutative, où la non commutativité est présente la singularité est absente.
43
Chapitre 5
conclusion
Notre travail touche à son terme, et avant de le clôturer, il nous semble opportun de se
rappeler que nous étions parties de rappel sur le formalisme de la théorie d’Einstein. Pour arri-
ver à l’objectif fixé au début de notre travail de recherche nous avons d’abord résolu l’équation
fondamentale de la relativité générale ; elle représente la relation entre la géométrie et le contenu
en matière de l’espace-temps. En générale c’est difficile de résoudre cette équation à cause des
non-linéarités, la plus simple solution dans le vide avec la symétrie sphérique et statique est
présentée par la métrique de schwarzschild. Ce dérnier traite la dynamyque des objets qui nous
appliquons sur le trou noir.
Enfin, pour quantifier la gravitation nous avons quantifier l’espace, pour cela nous avons
changés la géométrie ordinaire par la géométrie non commutative ensuite nous avons calculé
la métique de Schwarzschild non commutative, puis le potentièl gravitationnel g00, rH et la
température de Hawking d’un trou noir, alors nous trouvons l’effet de non-commutativité sur
la métrique de schwarzschild puis sur la thermodynamique de trou noir spésifiquement sur T.
Il est probable que cet effet représente l’effet de la mécanique quantique sur les grandeurs
physiques, en tout cas l’expérience reste la seule preuve de cela.
Notre recherche de ce fait n’est qu’une entrée à ce champ fertile.
44
45

Annexe A
Les Calculs
A.1 Le tenseur d’Einstein
L’identité de Bianchi définit comme
∇ρRαβµν +∇µR
αβνρ +∇νR
αβρµ = 0 (A.1.1)
En contractant sur les indices α et µ, et on utilise la définition du tenseur de Ricci (Rαβ=Rσασβ),
l’équation A.1.1 devient
∇ρRβν +∇µRµβνρ −∇νRβρ = 0
En multiplie cette dérnière équation par gβν :
∇ρ(gβνRβν) +∇µ(g
βνRµβνρ)−∇ν(g
βνRβρ) = 0. (A.1.2)
D’autre part nous avons
gβνRµβνρ = gβνgµσRσβνρ = gµσgβνRσβνρ = −gµσgβνRνσβρ = −gµσRσνρ = −gµσRν
σνρ
Ainsi l’équation A.1.1 devient :
∇ρR − gµσ∇µRσρ − gβν∇νRβρ = 0
⇒ ∇ρR− gβν∇νRβρ − gβν∇νRβρ = 0
⇒ ∇ρR− gβν∇νRβρ = 0
Nous multiplions cette équation par (−1/2), avec l’utilisation de la propriété de tenseur de
Riemann (Rβρ = Rρβ), puis nous effectuons les changements de notation (ν ↔ µ) et ρ ↔ α,
46

nous obtenons :
gβµ∇µRβα − 1
2∇αR = 0. (A.1.3)
Par addition nous avons ∇αR = δµα∇µR = gαβgβµ∇µR = gβµ∇µ(gαβR) = ∇βgαβR.
Par conséquent l’équation A.1.3 au final est
∇β[Rβα − 1
2Rgαβ] = 0.
où
Rβα − 1
2Rgαβ = Gαβ
définit comme le tenseur d’Einstein.
47
Annexe B
Definition
B.1 Les postulats de la relativité générale
Définition de la masse inertièlle et la masse gravitationnelle
masse inerte : sense inertielle, elle décit comment le corps va réagit à une tentative pour le
faire changer d’état de mouvement.
La loi de la dynamique de Newton postule que la résultante des forces appliquées à un corps est
égale au produit de son accélération ’a’ par un coéfficient s’appelle masse inertielle ; notée mi,
du corps : F = mia.
masse gravitationnelle : sense purement gravitationnelle, elle décrit comment le corps crée
son propre champs gravifique et comment il réagit à un champs extérieur.
D’autre part, Newton introduisit la masse gravitationnelle notée Mg ou mg dans l’expression de
la loi d’attraction universelle entre les corps, on peut considérer que les masses graves agissent
comme des sources qui engendent la force de gravitation, ou encore comme des charges gravi-
tationnelles qui s’attirent l’une l’autre.
48
Bibliographie
[1] Robert M.Wald. GENERAL RELATIVITY, The University of Chicago Press, 1984.
[2] Yannis Bardoux. Trous noirs dans des théories modifiées de la gravitation, 24 septembre
2012.
[3] Masoud Khalkhali. Very Basic Non commutative Géométry.
[4] Emmanuel Sérié. Théories de jauge en geéomeétrie non commutative et généralisation du
modèle de Born-Infeld, https://tel.archives-ouvertes.fr/tel-00010487v3
[5] Poggiaspalla . G, Tests classiques de la relativité générale, le 16 juin 1999.
[6] Vesselin Petkov.Space, Time, and Spacetime : Physical and Philosophical Implications of
Minkowski’s Unification of Space and Time, Springer Science and Business Media, 2 sept.
2010
[7] JAMES B. HARTLE et all.Gravitational Physics Exploring the Structure of Space and
Time, National Academy of Sciences, 1999.
[8] Hervé Kunz. Relativité Générale, itp.epfl.ch (Courses),Septembre 2007.
[9] DAVID McMAHON. Relativity Demystified, The McGraw-Hill Companies, 2006.
[10] Christiane Schomblond et Glenn Barnich. Introduction à la Relativité Générale.
[11] Éric Gourgoulhon. Relativité générale, Observatoire de Paris, Universités Paris 6, Paris 7
et Paris 11, École Normale Supérieure, 2013 - 2014.
[12] Alexandre FAURE.Equation des géodésiques dans un espace-temps de Schwarzschild-(anti-
)de Sitter : solutions analytiques et application à l’anomalie Pioneer, Université Paul Sa-
batier, Juin 2010.
[13] J.Pearson. Gravitation, Lecture Notes, July 20, 2009.
[14] Jérôme Picard. Les équations d’Einstein et leur résolution en symétrie sphérique.
49
[15] Cosmological Evolutionand Dependenceon Curvature
http://www.astro.umd.edu/ cychen/MATLAB/ASTR320/Spring2011/cosmicEvol.html
[16] physique théorique. http://www.pourlascience.fr
[17] Hirosuke Kuwabara. Hawking radiation of Black Holes, 2014
[18] Forough Nasseri.Schwarzschild Black Hole in Noncommutative Spaces,
arXiv:hep-th/0508051v1
[19] Xin-zhou Li. Comment on ’Schwarzschild Black Hole in Noncommutative Spaces’,
arXiv:hep-th/0508128v1
[20] Jaume Gomis and Thomas Mehen.Space-Time Noncommutative Field Theories And Uni-
tarity, arXiv:hep-th/0005129v2.
[21] L. Mezincescu. Star operation in Quantum Mechanics, arXiv:hep-th/0007046v2.
50