Embed Size (px)
Citation preview
Chapitre 1 :
Résolution des systèmes linéaires
Introduction Les phénomènes abondés en économie ou en gestion dépendent le plus souvent de plusieurs
paramètres. Pour les modéliser, on peut fait appel aux systèmes d'équations linéaires à plusieurs inconnues.
Ces derniers sont relativement simples d’un point de vue mathématique, précisément en raison de la linéarité
des équations. Pour leurs résolutions, on mettra en œuvre que des méthodes directes.
A. Généralités sur le système linéaire
I. Définition d’un hyperplan affine (équation linéaire à inconnues)
Définition :
Un hyperplan affine est représenté par une équation de type :
où les coefficients sont non tous nuls. C’est un sous-espace affine de dimension –
dans .
EXEMPLE :
La notion d'hyperplan est confondue avec celle
d’une droite dans le plan
d’un plan dans l’espace .
Deux équations linéaires sont équivalentes s’ils ont exactement les mêmes solutions. Si on multiplie, divise,
additionne ou soustrait les deux membres d’une équation par un même nombre non nul, on obtient une
équation équivalente à .
EXEMPLE :
l’équation est équivalente à l’équation
.
a. Équation linéaire à deux inconnues (une droite dans le plan )
Définition :
Une équation linéaire (du premier degré) à deux inconnues et et à coefficients réels est de la forme :
où les coefficients , et la constante sont des données ( et sont non tous nuls).
EXEMPLE :
Un fleuriste propose un type de bouquets de fleurs composé de 2 roses jaunes et 3 iris pour un prix de 8
Unités Monétaires. Soit le prix d'une rose jaune et le prix d'un iris. On peut modéliser le problème
sous forme d’une équation linéaire à deux inconnues .
Résoudre une telle équation dans revient à rechercher tous les couples de solutions qui la vérifient :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 2
EXEMPLE :
Soit l’équation linéaire à deux inconnues
Comme , alors le couple est solution de l’équation :
Comme , alors le couple n’est pas solution de l’équation :
IL existe une infinité de solutions vérifiant l’équation :
à chaque choix de correspond un calculé par la formule
. On écrit ainsi,
ou encore, à chaque choix de correspond un calculé par la formule
. On écrit,
Chaque équation linéaire à deux inconnues, de type où définit une fonction affine, et
est donc représentée graphiquement par une droite dans le plan muni d'un repère orthonormé.
Si et , l’équation réduite
est
équivalente à l’équation . La représentation
graphique de la fonction affine
dans le plan est
une droite oblique (non parallèle ni à l'axe des abscisses ni à
l’axe des ordonnées) d’équation réduite
de
coefficient directeur
( est dit aussi pente de la
droite). est un vecteur directeur de la droite. Le
coefficient
n’est autre que l’ordonnée à l’origine.
EXEMPLE : l’équation .
Si ( ) alors on a l’équation réduite (où
) qui représente graphiquement une droite horizontale
(parallèle à l'axe des abscisses).
EXEMPLE : l’équation .
Si ( ) alors on a l’équation réduite (où
) qui représente graphiquement une droite verticale
(parallèle à l'axe des ordonnées).
EXEMPLE : l’équation .
Propriétés :
1. Par deux points distincts dans le plan passe une et une seule droite.

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 3
2. Soit une droite dans le plan passant par deux points distincts
et
:
si , alors l'équation réduite de la droite est tout simplement .
si , alors l'équation réduite de la droite est tout simplement .
si et , alors l'équation réduite de la droite est tels que le
coefficient directeur vaut
, et l'ordonnée à l'origine est calculé en remplaçant les
coordonnées de l’un des deux points dans l’équation .
3. Le coefficient directeur d’une droite est positif si et seulement la droite monte. De même, il est négatif si
et seulement si la droite descend.
4. Deux droites dans le plan d'équations réduites respectives et sont :
parallèles si et seulement si ;
sécantes si et seulement si ;
perpendiculaires si et seulement si .
b. Équation linéaire à trois inconnues (un plan dans l’espace )
Définition :
Une équation linéaire à trois inconnues , et à coefficients réels est de la forme :
Les coefficients , , et la constante sont des données (les coefficients , et sont non tous
nuls).
EXEMPLE :
Un fleuriste propose un type de bouquets de fleurs composé de 3 roses jaunes, 2 roses rouges et 1 iris
pour un prix de 12 Unités Monétaires. Soit le prix d'une rose jaune, le prix d’une rose rouge et le
prix d'un iris. On peut modéliser le problème sous forme d’une équation linéaire à trois inconnues :
Résoudre une telle équation dans revient à rechercher tous les triplets de solutions qui la
vérifient :
EXEMPLE :
Soit l’équation linéaire à trois inconnues
Comme , alors le triplet est solution de l’équation :
Comme , alors le triplet n’est pas solution de l’équation :
Chaque équation linéaire à trois inconnues, écrite sous forme cartésienne où
( est représentée graphiquement par un plan dans le l’espace muni d'un repère
orthonormé. Le vecteur
est un vecteur normal au plan (perpendiculaire ou orthogonal au plan).
EXEMPLE :
est l’équation cartésienne d’un plan de vecteur normal
.
Propriétés :
1. Par trois points non alignés passe un et un seul plan.

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 4
2. Un plan dans l’espace, noté , d’équation cartésienne , passant par trois
points non alignés
,
et
. On prend un point de référence par exemple «
» et on détermine un vecteur normal
orthogonal aux deux vecteurs
et
. Ceci revient à résoudre un système de deux équations à trois
inconnues :
Puis pour trouver le second membre « »,il suffit de remplacer les coordonnées du point « » dans
l’équation .
3. Deux plans dans l’espace sont parallèles si et seulement si les coefficients respectifs des variables sont
proportionnelles.
4. Deux plans dans l’espace sont sécantes si et seulement si les coefficients respectifs de l’une des
variables sont non proportionnelles.
Remarques importantes :
1. Dans l’espace , étant donnée une droite de vecteur directeur
et passant par un point
. Un point est un point de la droite si et seulement si il existe tel que :
. Il s’agit de la représentation paramétrique de la droite :
2. Dans l’espace , la représentation paramétrique d’un plan passant par un point
et de
vecteurs directeurs
et
est donnée par :
II. Définition classique d’un système linéaire
Définition :
On appelle système d'équations linéaires (ou tout simplement système linéaire) de type (ou encore de
équations à inconnues ) à coefficients dans , le système :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 5
où
les inconnues , , ... , sont des scalaires réels ;
les données sont composées par des coefficients aux premiers membres et par les seconds
membres , pour tous et ;
Les accolades du système désignent la conjonction « et » de conditions portant sur les variables ,
, ... , .
EXEMPLE :
est un système de 2 équations linéaires à 2 inconnues,
est un système de 3 équations linéaires à 2 inconnues,
est un système de 3 équations linéaires à 3 inconnues,
est un système de 3 équations linéaires à 4 inconnues.
Vocabulaire :
Lorsqu’on a plus d’équations que d’inconnues : , le système (S) est dit « système surabondant »,
lorsqu’on a moins d’équations que d’inconnues : , le système (S) est dit « système sousabondant »,
lorsqu’on a autant d’équations que d’inconnues : , le système (S) est dit « carré »,
un système est dit homogène si le vecteur second membre est nul. À tout système (S), on associe un
système homogène obtenu en conservant les premiers membres de (S) et en annulant tous les
seconds membres :
III. Définition matricielle d’un système linéaire
Définition :
Le système s’écrit sous la forme matricielle suivante : où est la matrice de transformation de
type (ou encore, matrice des coefficients), est le vecteur colonne second membre et est l’inconnue,
avec
Le nombre de colonnes de A est égal au nombre d’inconnues ;
Le nombre de lignes de A est égal au nombre d’équations ;
Pour le système homogène associé , le second membre est nul : .
On appelle matrice augmentée du système , la matrice, notée , de type contenant toutes
les données du système :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 6
EXEMPLE :
Soit le système suivant,
Le système homogène associé est donné par :
Le système (S) s’écrit sous la forme matricielle , et son système homogène associé s’écrit sous
la forme avec,
La matrice augmentée du système est la matrice donnée par :
Vocabulaire :
Lorsque tous les coefficients situés en dessous de la diagonale d’une matrice carrée
sont nuls, la matrice est dite « triangulaire supérieure » et le système associé est dit « triangulaire
supérieur »,
lorsque tous les coefficients situés en dessus de la diagonale d’une matrice carrée
sont nuls, la matrice est dite « triangulaire inférieure » et le système associé est dit « triangulaire
inférieur »,
on appelle rang du système, le rang de la matrice associée.
IV. Définition vectorielle d’un système linéaire
Définition :
À chaque système linéaire on associe une application linéaire définie comme suit :
Où :
est la matrice associée à l’application linéaire ,
est un espace vectoriel de dimension le nombre d’inconnues (nombre de colonnes de la matrice ),
est un espace vectoriel de dimension le nombre d’équations (nombre de lignes de la matrice ),
est un vecteur colonne des coordonnées d’un vecteur ,
est un vecteur colonne des coordonnées d’un vecteur .
EXEMPLE :
Soit le système suivant,

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 7
avec,
On associe canoniquement à ce système une application linéaire définie comme suit :
on pose . Ainsi,
B. Résolution d’un système linéaire
Définitions :
Étant donné un système linéaire de équations à inconnues à coefficients réels :
Résoudre un tel système, c’est décrire l’intersection de hyperplans dans . Une solution du système
est un -uplet vérifiant les équations de . Ainsi, résoudre ce système
revient à montrer qu’il n’a pas de solution, ou alors en exhiber une résolution. Le système est dit :
Incompatible, inconsistant ou encore impossible s’il n’admet aucune solution,
compatible s’il admet au moins une solution. Dans le cas où il admet une infinité de solutions, le
système est dit indéterminé.
L’ensemble solution « » du système , s’il n’est pas vide, est un sous-espace affine de ,
Le système est toujours compatible, en effet, le -uplet est solution triviale du système,
L’ensemble solution « » du système homogène est un sous-espace vectoriel de de
dimension au moins égale à – .
La solution générale d’un système linéaire est la somme d’une solution particulière de et de la
solution générale du système homogène associé .
Deux systèmes linéaires et aux mêmes inconnues sont dits équivalents s’ils ont exactement le
même ensemble de solutions : il existe des manipulations qui permettent de transformer un système
en un système équivalent.
Les méthodes de résolution d’un système linéaire sont multiples selon que la matrice du système linéaire soit
carrée ou de dimension quelconque.
V. Méthode du pivot de Gauss

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 8
Étant donné un système d’équations linéaires quelconque, l’idée générale de base de la méthode
d’élimination de Gauss consiste à appliquer successivement des opérations élémentaires sur ce système en
vue de le transformer en un système échelonné en forme réduite équivalent, dont la résolution est très facile.
En pratique, on travaillera avec la matrice augmentée associée au système étudié.
EXEMPLE :
Soient les trois systèmes linéaires suivants :
Les trois systèmes sont équivalents. La résolution du système est plus simple comparée à celle de .
De même, la résolution du système est encore plus simple comparée à celle de . La méthode de
Gauss consiste à passer du système au système échelonné puis en fin au système échelonné en
forme réduite
c. Opérations élémentaires-lignes
On cite trois types d’opérations élémentaires-lignes définies comme suit où :
L’opération : on multiplie la ligne par un scalaire non nul :
L’opération : on permute la ligne avec la ligne : et
L’opération : on ajoute à la ligne la ligne multipliée par :
On définit aussi l’opération (on permute la colonne avec la colonne : et ).
La notation « », signifie « prend la valeur ».
d. Matrices lignes-équivalentes :
Deux matrices et sont dites lignes-équivalentes si l’une est la transformée de l’autre par une suite finie
d’opérations élémentaires-lignes. On note tout simplement la notation «
», signifie « équivalent à
l’aide de l’opération ».
En effectuant l’opération élémentaire , on obtient une nouvelle matrice lignes-équivalente à
. On note
En effectuant l’opération élémentaire , on obtient une nouvelle matrice lignes-équivalente à .
On note
En effectuant l’opération élémentaire , on obtient une nouvelle matrice lignes-équivalente à
. On note
Les matrices lignes-équivalentes ont le même rang.
EXEMPLE :
Soit la matrice donnée par :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 9
Effectuons simultanément sur les opérations élémentaires-lignes , puis :
On constate que
e. Matrice échelonnée en forme réduite ou canonique
Définition d’une matrice lignes-échelonnée
Une matrice est dite une matrice lignes-échelonnée s’il existe un entier , appelé rang de la
matrice ( ), tels que :
toute ligne qui succède une ligne nulle de la matrice est aussi nulle,
le nombre de zéros consécutifs commençant une ligne non nulle de la matrice est strictement croissant
de ligne en ligne,
toutes les lignes après les premières lignes sont nulles.
Vocabulaire :
Le premier coefficient non nul de toute ligne non nulle de la matrice lignes-échelonnée est appelé « pivot »
de cette ligne. La colonne qui contient ce pivot est appelée colonne de pivot. Le rang d’une matrice lignes-
échelonnée est tout simplement : c’est le nombre des premières lignes non nulles ou encore le nombre de
pivots.
Une matrice est dite une matrice colonnes-échelonnée si la matrice transposée est lignes-
échelonnée :
EXEMPLE :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 10
La matrice est lignes-échelonnée avec . Les deux pivots sont 3 et .
La matrice est colonnes-échelonnée avec . Les trois pivots sont 1, 2 et 5.
La matrice n’est pas lignes-échelonnée puisque le deuxième critère n’est pas vérifié.
Recherche d’une matrice lignes-échelonnée
Soit la matrice non nulle .
1. déplacer toutes les lignes nulles en bas de la matrice ;
2. si tous les coefficients de la première colonne sont nuls, on effectue une permutation des colonnes
pour obtenir une première colonne non nulle ;
3. on choisit dans la première colonne un élément non nul (appelé pivot) tel que pour
tout indice , et on effectue l’opération élémentaire , échange des lignes 1 et i. On obtient ainsi
une matrice dont le coefficient
est non nul ;
4. annuler tous les coefficients en bas du pivot en effectuant l’opération élémentaire
; on
obtient alors une nouvelle matrice sous la forme
5. si la matrice B est nulle, alors ;
6. sinon on répète les itérations sur la matrice autant de fois que nécessaire. Si, au bout de
itérations, la matrice constituée des – dernières lignes et – dernières colonnes est nulle,
alors .
EXEMPLE :
Définition d’une matrice lignes-échelonnée en forme réduite :
Une matrice lignes-échelonnée est dite lignes-échelonnée en forme réduite si :
tous les pivots des lignes de la matrice sont égaux à 1,
chaque pivot de ligne est le seul coefficient non nul de la colonne de pivot correspondante.
EXEMPLE :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 11
La matrice est lignes-échelonnée en forme réduite, alors que la matrice ne l’est pas.
Recherche d’une matrice lignes-échelonnée en forme réduite équivalente
Soit la matrice non nulle . On détermine tout d’abord une matrice lignes-échelonnée
équivalente à . En suite, on rend tous les pivots égaux à 1 et puis on annule tous les coefficients en haut des
pivots en effectuant des opérations élémentaires lignes par remontée en commençant par la dernière ligne de
pivot. On obtient alors une nouvelle matrice, par exemple, sous la forme :
EXEMPLE :
Système linéaire échelonné en forme réduite
i. Système linéaire échelonné
Nous dirons qu’un système linéaire est échelonné s’il se présente sous la forme suivante :
Mettre un système sous forme échelonnée , c’est passer de à par une suite
d’opérations lignes-élémentaires, et une permutation éventuelle des variables et/ou des équations, de sorte
que :
les inconnues de sont celles de , mais dans un ordre qui peut être différent, on les
appelle « les inconnues principales ». Les autres inconnues sont dites non principales ou secondaires,
les coefficients , appelés pivots, sont tous non nuls.
La matrice associée à un système linéaire échelonnée est une matrice lignes-échelonnée :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 12
Avec est le rang du système ou encore le rang de la matrice associée.
En effectuant l’opération , on obtient un nouveau système équivalent à en multipliant
la équation de par un scalaire non nul : . On note
.
En effectuant l’opération , on obtient un nouveau système équivalent à en permutant la
équation avec la équation de : et
. On note
En effectuant l’opération , on obtient un nouveau système équivalent à en permutant la
inconnue avec la inconnue de : et
. On note
En effectuant l’opération on obtient un nouveau système équivalent à en ajoutant à
la équation de la équation de multipliée par : . On note
.
EXEMPLE :
Soit le système linéaire échelonné suivant :
Sa matrice lignes-échelonnée associée est donnée par :
Le rang de la matrice est égal à trois, . Les pivots sont 1, 4, 2. Les variables correspondants
aux colonnes de pivot sont les inconnues principales , et . Seule est une inconnue
secondaire.
ii. Compatibilité d’un système linéaire échelonné
Une équation de compatibilité est toute équation du système échelonné dont le premier membre est nul. En
général, on a conditions de compatibilité à vérifier. Deux cas se posent :
le second membre de l’une des équations de compatibilité est non nul,
tous les seconds membres des équations de compatibilité sont nuls.
EXEMPLE :
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 13
Le système n’admet aucune équation de compatibilité,
Le système admet deux équations de compatibilité toutes ayant un second membre nul,
Le système admet trois équations de compatibilité dont l’une admet un second membre non nul.
iii. Résolution d’un système linéaire échelonné :
Si , le système est compatible et admet une unique solution.
Si , on a équations de compatibilité à vérifier :
o Si le second membre de l’une des équations de compatibilité est non nul, alors le système
linéaire échelonné est incompatible et par conséquent son ensemble de solution est vide.
o Si les seconds membres de toutes les équations de compatibilité sont nuls, alors le système est
compatible. On retire les équations de compatibilité et on obtient un autre système équivalent à
, puis on résout le système par remontée en commençant par calculer l’inconnue principale
dans sa dernière équation :
si , on considère les inconnues secondaires comme des paramètres et on
les fait passer dans le second membre. Le système admet une infinité de solutions.
si , si le système admet une solution alors elle est unique.
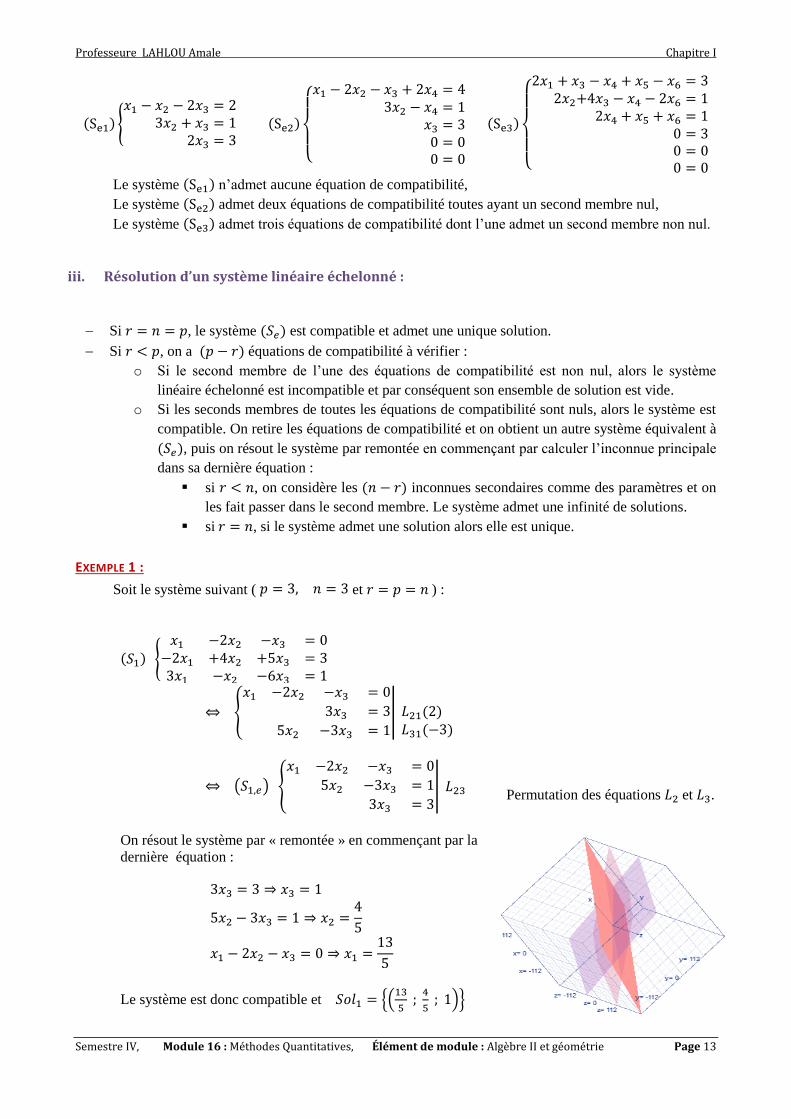
EXEMPLE 1 :
Soit le système suivant ( et ) :
Permutation des équations et .
On résout le système par « remontée » en commençant par la
dernière équation :
Le système est donc compatible et
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 14
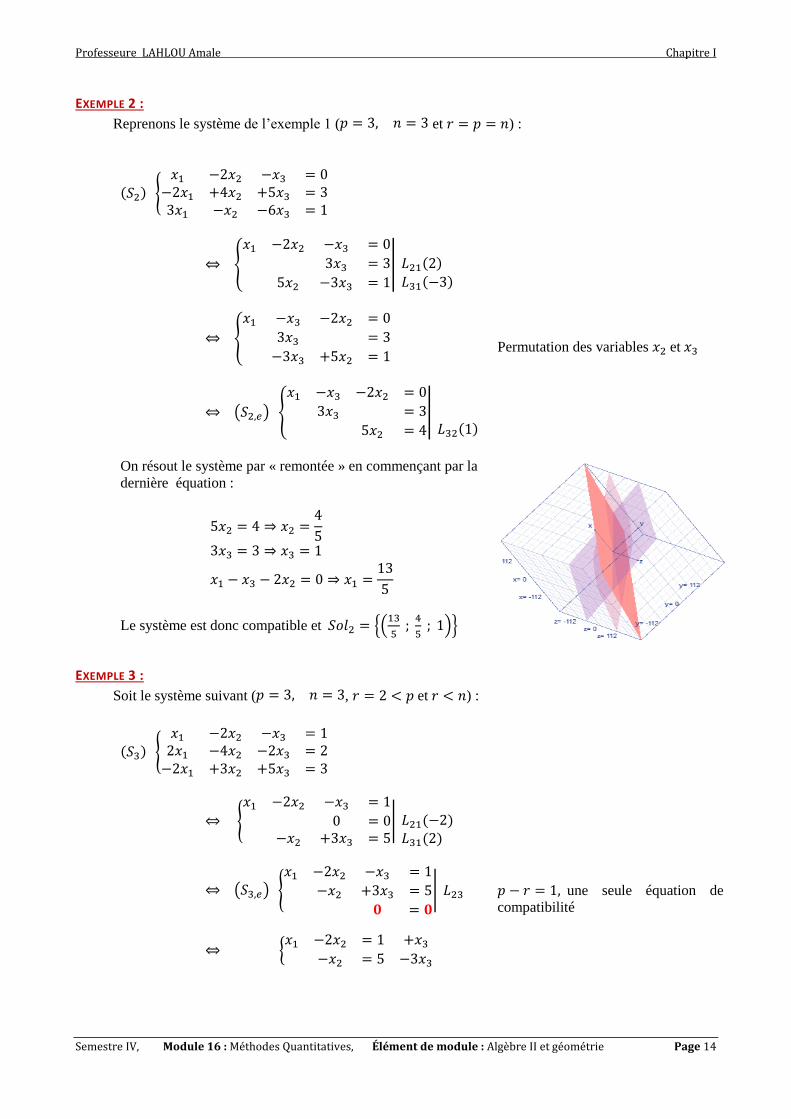
EXEMPLE 2 :
Reprenons le système de l’exemple 1 ( et ) :
Permutation des variables et
On résout le système par « remontée » en commençant par la
dernière équation :
Le système est donc compatible et
EXEMPLE 3 :
Soit le système suivant ( , et ) :
une seule équation de
compatibilité
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 15
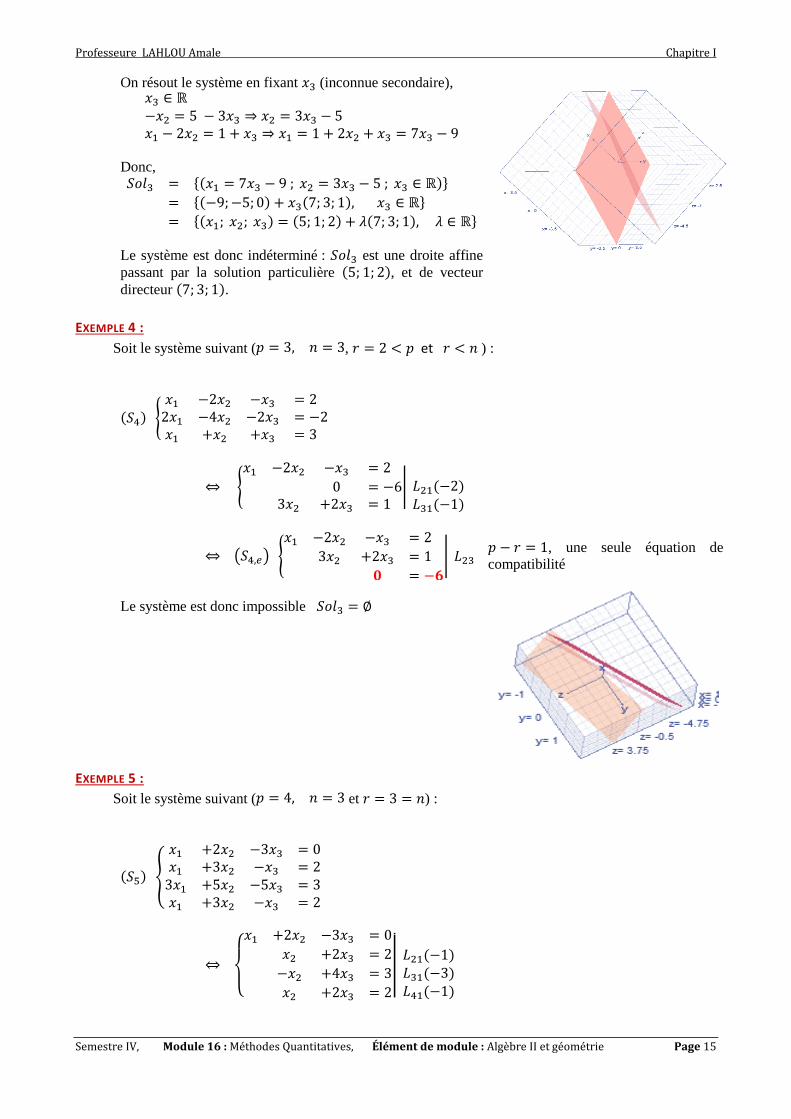
On résout le système en fixant (inconnue secondaire),
Donc,
Le système est donc indéterminé : est une droite affine
passant par la solution particulière , et de vecteur
directeur .
EXEMPLE 4 :
Soit le système suivant ( , et ) :
, une seule équation de
compatibilité
Le système est donc impossible
EXEMPLE 5 :
Soit le système suivant ( et ) :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 16
On résout le système par « remontée » en commençant par la
dernière équation :
Le système est donc compatible et
iv. Système linéaire échelonné en forme réduite
Nous dirons qu’un système linéaire est échelonné en forme réduite si la matrice associée est lignes-
échelonnée en forme réduite.
EXEMPLE :
Le système linéaire suivant est échelonné en forme réduite,
puisque sa matrice associée est lignes-échelonnée en forme réduite, en effet :
v. Résolution d’un système échelonné en forme réduite
Une fois le système mis sous forme échelonnée, on discute :
Si , le système est compatible et admet une unique solution.
Si , on a équations de compatibilité à vérifier :
o si le second membre de l’une des équations de compatibilité est non nul, alors le système
linéaire échelonné est incompatible et par conséquent son ensemble de solution est vide,
o Si les seconds membres de toutes les équations de compatibilité sont nuls, alors le système est
compatible et on doit chercher les solutions :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 17
on retire les équations de compatibilité et on obtient un autre système équivalent à
avec lequel on va travailler,
On divise chacune des équations restantes par son pivot. Le nouveau pivot vaut 1,
s , on a que des inconnues principales et si , on considère les
inconnues secondaires comme des paramètres qui peuvent prendre des valeurs
arbitraires et on les fait passer dans le second membre,
en commençant par la dernière inconnue principale et dans la dernière équation du
système, on annule les termes au dessus du pivot. On recommence cette procédure par
remontée jusqu’à parcourir toutes les inconnues principales.
Reprenons quelques exemples précédents :
EXEMPLE 1 :
Soit le système suivant,
Ainsi,
. On a bien
EXEMPLE 2 :
Soit le système suivant,
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 18
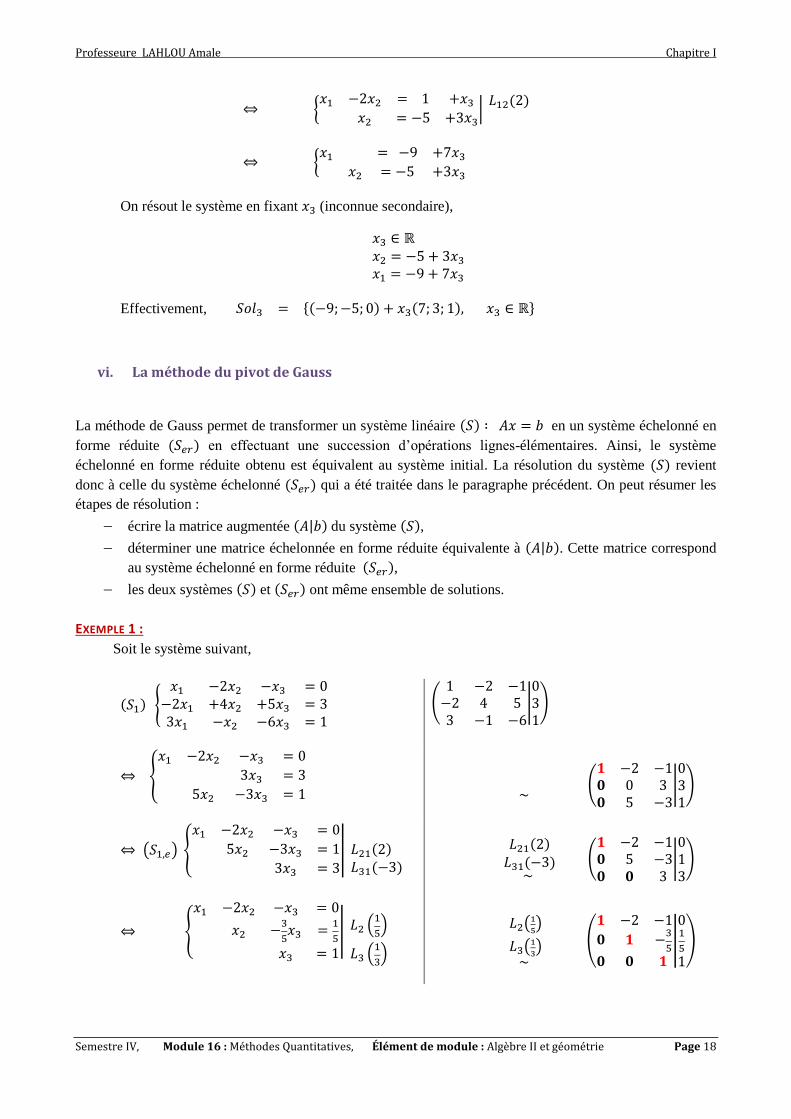
On résout le système en fixant (inconnue secondaire),
Effectivement,
vi. La méthode du pivot de Gauss
La méthode de Gauss permet de transformer un système linéaire en un système échelonné en
forme réduite en effectuant une succession d’opérations lignes-élémentaires. Ainsi, le système
échelonné en forme réduite obtenu est équivalent au système initial. La résolution du système revient
donc à celle du système échelonné qui a été traitée dans le paragraphe précédent. On peut résumer les
étapes de résolution :
écrire la matrice augmentée du système ,
déterminer une matrice échelonnée en forme réduite équivalente à . Cette matrice correspond
au système échelonné en forme réduite ,
les deux systèmes et ont même ensemble de solutions.
EXEMPLE 1 :
Soit le système suivant,
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 19
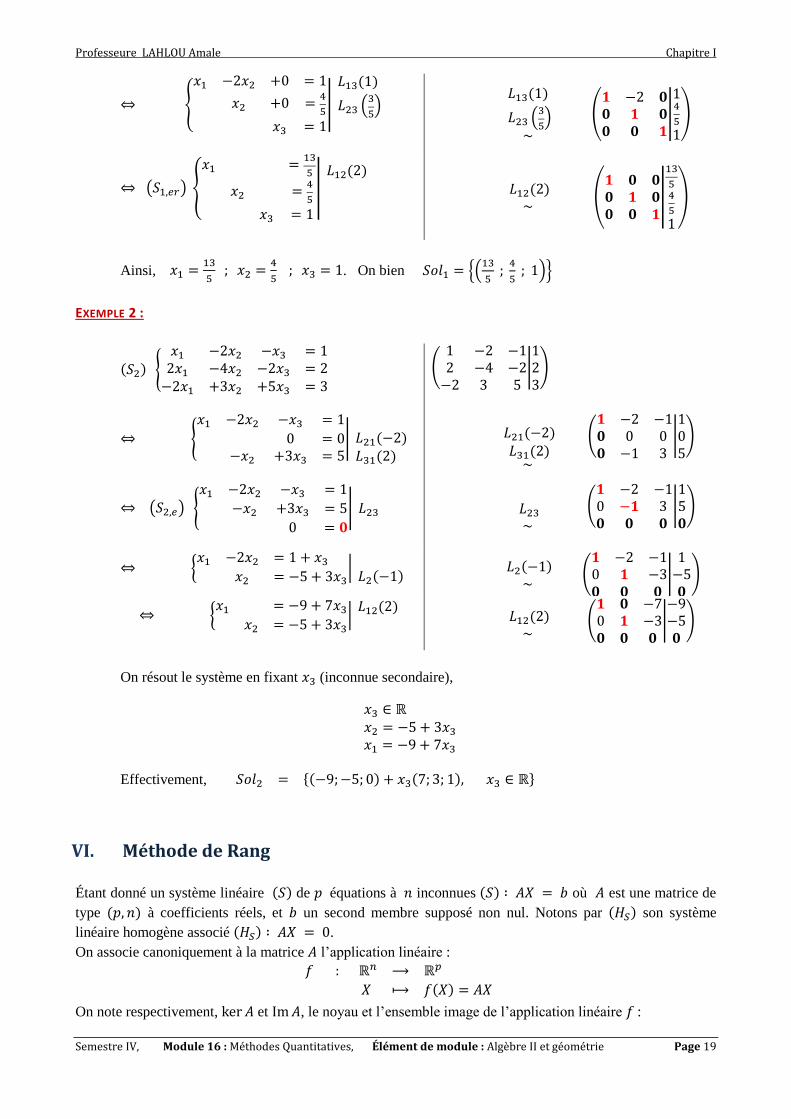
Ainsi,
. On bien
EXEMPLE 2 :
On résout le système en fixant (inconnue secondaire),
Effectivement,
VI. Méthode de Rang
Étant donné un système linéaire de équations à inconnues où est une matrice de
type à coefficients réels, et un second membre supposé non nul. Notons par son système
linéaire homogène associé .
On associe canoniquement à la matrice l’application linéaire :
On note respectivement, et , le noyau et l’ensemble image de l’application linéaire :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 20
et .
On note par , l’ensemble des solutions du système et par , l’ensemble des solutions du système
homogène associé .
Proposition :
La solution générale du système non homogène est donnée par où :
est une solution particulière du système non homogène ( ),
est une solution du système homogène ( ).
Si la matrice est inversible, alors est le vecteur nul, sinon, est un vecteur non nul.
EXEMPLE :
Soit le système avec,
,
et
On a trouvé antérieurement que le système admet une infinité de solutions. Une solution générale du
système est donnée par :
où est une variable arbitraire.
on vérifie que
est une solution particulière du système et est une solution
du système homogène associé .
f. Cas où il y a autant d’équations que d’inconnues :
Dans ce cas, on s’intéresse au système à matrice carrée d’ordre et à coefficients réels :
avec, et .
Définition :
Le système est dit de Cramer si la matrice associée est carrée et inversible.
N.B. : est carrée si et seulement si .
est inversible si et seulement si si et seulement si .
Théorème :
Tout système de Cramer admet une et une seule solution.
Résolution par inversion de matrice :
Étant donné un système de Cramer, la matrice associée est inversible ainsi,
où
.
Résolution par les formules de Cramer :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 21
La méthode des déterminants est particulièrement efficace pour résoudre des systèmes linéaires de Cramer.
En effet, les formules de Cramer expriment les coordonnées de l’unique solution comme des rapports de
déterminants :
a) Systèmes homogènes
On montre facilement que , c'est-à-dire, l’ensemble des solutions du système n’est
autre que le noyau de l’application linéaire associée et le système est compatible. Deux cas se présentent :
La matrice est inversible, i.e., : dans ce cas l’application linéaire est bijective et donc
et . Le vecteur nul est l’unique solution du système, .
La matrice est non inversible, i.e., : dans ce cas l’application linéaire est non
bijective et par conséquent et où , le système
admet une infinité de solutions.
EXEMPLES :
1. Soit le système avec,
et
Tout calcul fait, on obtient donc est inversible et
2. Soit le système avec,
et
Tout calcul fait, on obtient donc est non inversible avec .
où est l’inconnue secondaire qui parcourt . Ainsi
.
est un sous espace vectoriel de dimension 1 engendré par le vecteur
N.B. : ici,
3. Soit le système avec,
et
Tout calcul fait, on obtient donc est non inversible avec .

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 22
où et sont les inconnues secondaires qui parcourent . Ainsi
est un sous espace vectoriel de dimension 2 engendré par les vecteurs et
. C’est un
plan dans l’espace d’équation .
N.B. : ici,
b) Systèmes non homogènes
Trois cas se présentent :
Si , alors le système n’admet aucune solution ;
Si et
o si , alors le système est de Cramer et donc admet une unique solution. En effet,
la matrice est inversible, i.e., et . Dans ce cas, le vecteur solution
est l’unique solution du système. On peut retrouver la solution par les formules de
Cramer.
o si , alors la matrice est non inversible, i.e., : pour que le système
admet une infinité de solutions il faut que .
EXEMPLE 1 :
Soit le système avec,
,
et
Tout calcul fait, on obtient donc est inversible.
Méthode 1 de résolution : par inversion matricielle
et
Méthode 2 de résolution : en appliquant les formules de Cramer
–

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 23
Méthode 3 de résolution : élimination de Gauss
Le système admet donc une unique solution
.
EXEMPLE 2 :
Soit le système avec,
,
et
Tout calcul fait, on obtient donc est non inversible. La matrice échelonnée en forme
réduite de la matrice est donnée par :
donc .
Soit la matrice associée au système avec,
La matrice échelonnée en forme réduite de la matrice est donnée par :
Et comme , le système est donc impossible : .
EXEMPLE 3 :
Soit le système avec,
,
et
Tout calcul fait, on obtient donc est non inversible. La matrice échelonnée en forme
réduite de la matrice est donnée par :
donc .

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 24
Soit la matrice associée au système avec,
On a la matrice échelonnée en forme réduite de la matrice est donnée par :
Et comme , le système est donc compatible (admet une infinité de
solutions) et on a :
Donc, est une droite dans l’espace passant par le point
et de vecteur directeur
EXEMPLE 4 :
Soit le système avec,
,
et
Tout calcul fait, on obtient donc est non inversible. La matrice échelonnée en forme
réduite de la matrice est donnée par :
donc .
Soit la matrice associée au système avec,
On a la matrice échelonnée en forme réduite de la matrice est donnée par :
Et comme , le système est donc compatible (admet une infinité de
solutions) et on a :
Donc, est un plan dans l’espace passant par le point et de vecteurs directeurs
et
:
g. Cas où le nombre d’équations est différent de celui des inconnues :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 25
Étant donné un système linéaire où est une matrice carrée d’ordre à coefficients réels et
le second membre. On associe canoniquement à la matrice l’application linéaire
Trois cas se présentent :
si , alors le système n’admet aucune solution ;
si et
o si , alors le système admet une unique solution ;
o si , alors le système admet une infinité de solutions.
c) Pour les systèmes surabondant
En général, le système est incompatible. Toutefois on peut rencontrer des systèmes avec une infinité de
solutions.
EXEMPLE :
Soit le système avec,
,
et
La matrice échelonnée en forme réduite de la matrice est donnée par :
donc .
Soit la matrice associée au système avec,
On a la matrice échelonnée en forme réduite de la matrice est donnée par :
Et comme , le système est donc incompatible.
d) Pour les systèmes sousabondant
En général, le système admet une infinité de solutions. Toutefois on peut rencontrer des systèmes
incompatibles.
EXEMPLE :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 26
Soit le système avec,
,
et
La matrice échelonnée en forme réduite de la matrice est donnée par :
donc .
Soit la matrice associée au système avec,
On a la matrice échelonnée en forme réduite de la matrice est donnée par :
Et comme , le système est donc compatible (admet une infinité de
solutions) et on a :
Donc,
C. Résolution d’un système linéaire de 2 équations à 2 inconnues
Définition :
Un système de deux équations linéaire à deux inconnues et (ou tout simplement un système linéaire carré
à deux inconnues) est un système de la forme suivante :
où les inconnues et sont des scalaires réels et les données sont composées par des coefficients et
par le second membre pour tout et
EXEMPLE :
Un fleuriste propose deux types de bouquets de fleurs :
l'un composé de 2 roses jaunes et 3 iris pour 9 UM.
l'autre composé de 1 rose jaune et 1 iris pour 3.5 UM.
Pour calculer le prix x d'une rose et le prix y d'un iris, il faut résoudre le système suivant :
Définition :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 27
Le système (S) s’écrit sous la forme matricielle suivante où la matrice carrée d’ordre 2 et le
second membre sont les données, et l’inconnue avec
On appelle le déterminant du système (S), le déterminant de la matrice associée donné par :
EXEMPLE :
L’équation est l’écriture matricielle du système :
Avec,
Résoudre un système linéaire de 2 équations à 2 inconnues dans le plan revient à rechercher tous les couples
de solutions qui vérifient simultanément les deux équations. Ce type de système admettra une solution
unique (droites sécantes), aucune solution (droites strictement parallèles), ou une infinité de solutions
(droites parallèles confondues).
Notons qu’en remplaçant l’une des équations par une équation équivalente, ceci ne change en rien
l’ensemble des solutions. Pour résoudre (S), on résout le système équivalent ,
Il existe plusieurs méthodes pour résoudre un tel système. Le choix de la méthode dépend du système
considéré.
résolution algébrique (inversion de matrice, formules de Cramer, substitution, comparaison,
combinaison linéaire, …) : donne une valeur exacte de la solution du système.
résolution graphique : donne souvent une valeur approchée de la solution du système.
Résolution algébrique
Soit à résoudre le système linéaire suivant :
Trois cas sont possibles selon la nullité ou non du déterminant de ce système :
CAS 1 : , dans ce cas le système admet une unique solution,
CAS 2 : et , dans ce cas le système n’admet aucune solution,
CAS 3 : et , dans ce cas le système admet une infinité de solutions.
CAS 1 : , dans ce cas le système admet une unique solution
Le système linéaire de 2 équations à 2 inconnues a une solution unique si et seulement si la
matrice associée est inversible, si et seulement si son déterminant est non nul.
Dans ce cas, le système est de Cramer.

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 28
On traite l’exemple suivant via plusieurs méthodes :
Méthode par inversion de matrice :
Pour cet exemple, on a bien une matrice inversible puisque . Ainsi, l’unique solution est
donnée par
On sait que :
Ainsi,
Et donc
Formules de Cramer :
Pour cet exemple, le système est bien de Cramer et on trouve la solution à l’aide des formules de Cramer,
Ainsi,
=
Méthode d’élimination par substitution :
Elle consiste à exprimer dans une équation une des deux inconnues en fonction de l’autre, puis à remplacer
l’expression obtenue dans l’équation restante ; on obtient ainsi une équation à une seule inconnue :
on isole l’inconnue dans la deuxième équation
–
on remplace par son expression dans la première
équation

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 29
on détermine la valeur de l’inconnue
on détermine la valeur de l’inconnue
Donc,
Méthode par comparaison :
Elle consiste à exprimer dans les deux équations une des deux inconnues en fonction de l’autre. On obtient
ainsi une équation à une seule inconnue :
on exprime par exemple dans chaque équation en
fonction de
à partir de ces deux égalités, on va former une équation
qui ne dépend que de
on détermine la valeur de l’inconnue
puis on détermine la valeur de l’inconnue
Donc,
Méthode par combinaisons linéaires (combinaisons de lignes) :
Encore dite méthode d’addition, Cette méthode s'adapte facilement aux cas les plus complexes. Elle consiste
à ajouter, membre à membre, les deux équations après les avoir multipliées par des coefficients
convenablement choisis pour éliminer l’une des deux inconnues ; on obtient ainsi une équation à une seule
inconnue :
on multiplie les deux équations par des nombres
choisis de manière à obtenir les coefficients
opposés dans chacune des deux équations pour,
par exemple, l’inconnue .
on additionne membre à membre les deux
équations du système afin d’obtenir une équation
à une seule inconnue .
on détermine alors en résolvant cette équation.
on détermine ensuite l’inconnue en reportant la
valeur dans une des équations de départ.
Donc

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 30
CAS 2 : et , dans ce cas le système n’admet aucune solution
Le système linéaire de 2 équations à 2 inconnues est indéterminé si et seulement si les deux équations
formant ce système sont équivalentes. Dans ce cas, il est possible de chercher les mêmes coefficients des
variables dans les deux équations du système (puisque ) avec des seconds membres identiques
(puisque ).
On traite l’exemple suivant :
Notons que le déterminant du système et On cherche les mêmes
coefficients des variables dans les deux équations du système,
On remarque qu’on aboutit à une même équation. Donc le système est indéterminé : l’une des inconnues est
choisie arbitrairement et l’autre calculée à partir du choix de la première :
CAS 3 : et , dans ce cas le système admet une infinité de solutions
Le système linéaire de 2 équations à 2 inconnues n’admet aucune solution si et seulement si et
. Dans ce cas, il est possible de chercher les mêmes coefficients des variables dans les
deux équations du système (puisque ) mais on se trouve avec des seconds membres différents
(puisque ).
On traite l’exemple suivant :
Notons que le déterminant du système et On cherche les mêmes
coefficients des variables dans les deux équations du système,
On remarque qu’on aboutit à deux équations telles que les premiers membres sont identiques et les seconds
membres sont différents. Donc le système est impossible : .
Résolution graphique :
Une lecture graphique conduit souvent à une solution approchée du système.
Soit à résoudre le système linéaire suivant :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 31
Chacune des équations linéaires de ce système représente une droite :
La droite a pour coefficient directeur
et de vecteur directeur
La droite a pour coefficient directeur
et de vecteur directeur
La résolution d’un tel système est liée à la position relative des deux droites et dans le plan. Elle
peut être vide, réduite à un point, ou égale à une droite :
Droites sécantes :
Si les deux équations représentent deux droites avec des coefficients directeurs différents
« autrement dit, les deux vecteurs directeurs associés et sont non colinéaires ( ) »,
alors l’intersection de ces deux droites est un unique point. Et donc, le système correspondant admet
une solution unique.
Droites parallèles confondues :
Si les deux équations représentent deux droites avec des coefficients directeurs identiques
« autrement dit, les deux vecteurs directeurs associés et sont colinéaires ( ) » et
les ordonnées à l’origine sont identiques, alors l’intersection des deux droites est une infinité de points.
Le système se résume donc en une seule équation et donc admet une infinité de solution.
Droites strictement parallèles :
Si les deux équations représentent deux droites avec des coefficients directeurs identiques
« autrement dit, les deux vecteurs directeurs associés et sont colinéaires ( ) » et
les ordonnées à l’origine sont différents, alors l’intersection de ces deux droites est vide. Le système
correspondant n’a aucune solution.
EXEMPLE 1 : vecteurs directeurs non colinéaires
On prend l’exemple suivant :
Chacune des équations linéaires du système représente une droite :
La représentation graphique de la fonction affine
est une droite, qu’on notera
, d’équation
de coefficient directeur
et de vecteur directeur ,
La représentation graphique de la fonction affine
est une droite, qu’on notera ,
d’équation
de coefficient directeur et de vecteur directeur

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 32
Ainsi, les deux droites ont des coefficients directeurs différents
et donc des vecteurs
directeurs non colinéaires.
Résoudre le système revient à déterminer les points d’intersection des deux droites
et . Ces deux droites sont sécantes puisque leurs coefficients directeurs sont différents. Pour tracer
chaque droite, on cherche le tableau de valeurs de deux points,
0
3 0
0
0
La droite passe par les points de coordonnées
et
et la droite passe par les
points de coordonnées
et
. On trace
dans un repère les deux droites. Les deux droites se
coupent en un point dont les coordonnées donnent
la solution du système
. Il est indispensable
de vérifier la solution lors d’une résolution d’un
système.
Il faut donc toujours vérifier les résultats de la
lecture graphique par le calcul
On peut ainsi lire graphiquement une approximation
de la solution du système.
EXEMPLE 2 : vecteurs directeurs colinéaires et les ordonnées à l’origine sont identiques
On prend l’exemple suivant :
est l’équation d’une droite de vecteur directeur ,
est l’équation d’une droite de vecteur directeur
.
Ainsi, les deux droites ont des vecteurs directeurs colinéaires (et par conséquent des
coefficients directeurs identiques) et les ordonnées à l’origine sont identiques. Ainsi, les deux
équations du système représentent la même droite :
Graphiquement, on obtient un cas particuliers de droites
parallèles « droites confondues »
EXEMPLE 3 : vecteurs directeurs colinéaires et les ordonnées à l’origine sont différentes
On prend l’exemple suivant :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 33
est l’équation d’une droite de vecteur directeur ,
est l’équation d’une droite de vecteur directeur
.
Ainsi, les deux droites ont des vecteurs directeurs
colinéaires (et par conséquent des coefficients
directeurs identiques) mais les ordonnées à l’origine sont
différentes ( ). Ainsi, les deux équations du système
représentent deux droites strictement parallèles.
D. Résolution d’un système linéaire de 3 équations à 2 inconnues
Définition :
Considérons le système formé par trois équations linéaires à deux inconnues et :
où les inconnues et sont des scalaires réels et les données sont composées par des coefficients
et et par le second membre pour tout et
Résolution algébrique :
EXEMPLE 1 :
Soit à résoudre le système linéaire suivant,
On considère le sous système de deux équation à deux inconnues
qui admet comme
unique solution . Ce pendant cette solution ne vérifie pas l’équation restante, en effet,
. De ce fait, le système est impossible.
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 34
On considère le sous système de deux équation à deux inconnues
qui admet comme
unique solution . Cette solution vérifie aussi l’équation restante, en effet, .
De ce fait, le système admet une solution unique.
EXEMPLE 3 :
Soit à résoudre le système linéaire suivant :
On considère le sous système de deux équation à deux inconnues
qui admet une infinité
de solutions pour tout réel . Cette solution vérifie aussi l’équation restante, en effet,
.
De ce fait, le système admet une infinité de solutions.
Résolution graphique :
Géométriquement, résoudre un tel système revient à déterminer l’intersection de trois droites dans le plan
. Le système est généralement impossible, mais il peut être indéterminé ou avoir une solution unique.
EXEMPLE 1 :
Soit à résoudre le système linéaire suivant,
L’intersection de ces trois droites dans le plan est vide. Ainsi,
le système n’admet aucune solution.
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :
L’intersection de ces trois droites dans le plan se réduit à un
point. Ainsi, le système admet une solution unique.
EXEMPLE 3 :
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 35
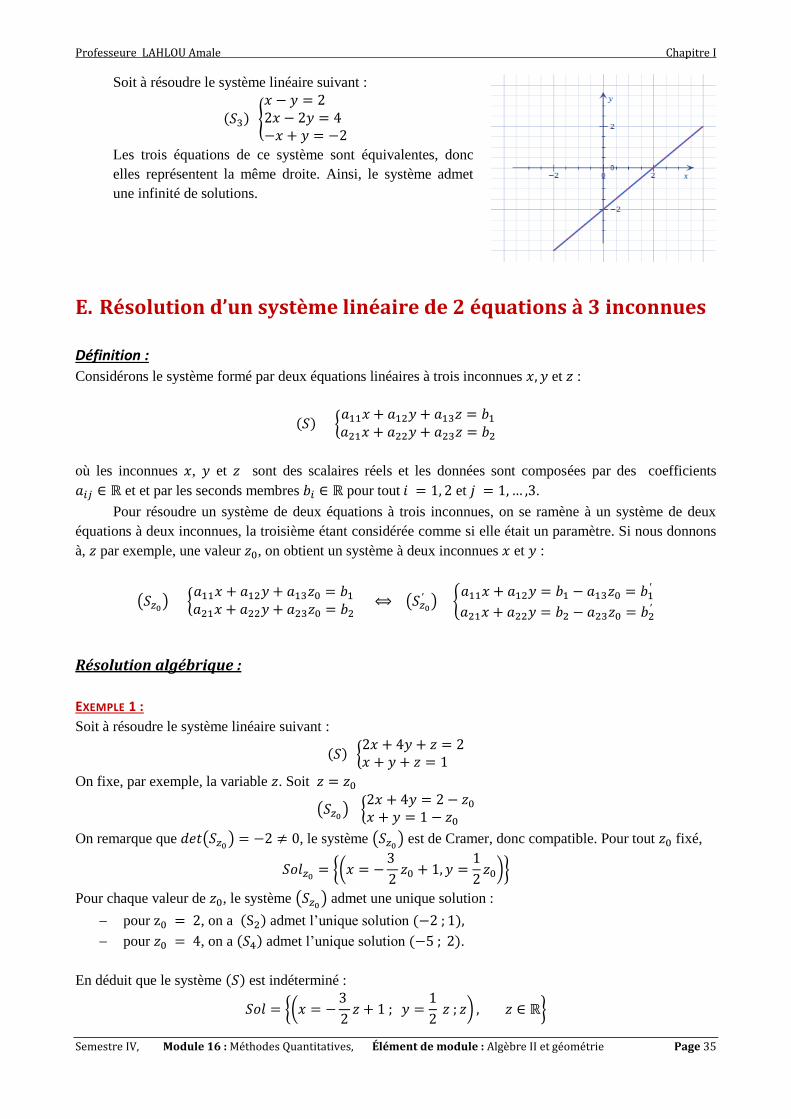
Soit à résoudre le système linéaire suivant :
Les trois équations de ce système sont équivalentes, donc
elles représentent la même droite. Ainsi, le système admet
une infinité de solutions.
E. Résolution d’un système linéaire de 2 équations à 3 inconnues
Définition :
Considérons le système formé par deux équations linéaires à trois inconnues et :
où les inconnues , et sont des scalaires réels et les données sont composées par des coefficients
et et par les seconds membres pour tout et .
Pour résoudre un système de deux équations à trois inconnues, on se ramène à un système de deux
équations à deux inconnues, la troisième étant considérée comme si elle était un paramètre. Si nous donnons
à, par exemple, une valeur , on obtient un système à deux inconnues et :
Résolution algébrique :
EXEMPLE 1 :
Soit à résoudre le système linéaire suivant :
On fixe, par exemple, la variable . Soit
On remarque que , le système
est de Cramer, donc compatible. Pour tout fixé,
Pour chaque valeur de , le système admet une unique solution :
pour , on a admet l’unique solution
pour , on a admet l’unique solution .
En déduit que le système est indéterminé :

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 36
Pour chaque valeur de , le système admet une solution :
pour , le système admet la solution
pour , le système admet la solution .
On donne une autre écriture de l’ensemble des solutions à l’aide d’une équation paramétrique :
L’ensemble des solutions est une droite passant par et de vecteur directeur
« ou encore
»
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :
On fixe, par exemple, la variable . Soit :
On remarque que on peut donc chercher un système qui lui est équivalent
dont les
premiers membres de ses équations sont identiques. Dans ce cas, les seconds membres des équations
formants sont différents donc le système
est donc impossible et par suite le système est
aussi impossible. Il en est de même pour le système
EXEMPLE 3 :
Soit à résoudre le système suivant :
On fixe, par exemple, la variable . Soit :
On remarque que on peut donc chercher un système qui lui est équivalent
dont les
premiers membres de ses équations sont identiques. Dans ce cas, les équations de sont carrement
équivalentes donc le système est donc indéterminé et par suite le système
est aussi indéterminé.
Il en est de même pour le système
Pour tout fixé on a,
En déduit que :
En effet, Les deux équations du système représentent le même plan. L’ensemble des solutions du
système est un plan d’équation
.
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 37
Résolution graphique :
Géométriquement, résoudre un tel système revient à calculer l’intersection de deux plans dans l’espace .
Le système est généralement indéterminé, mais il peut être impossible.
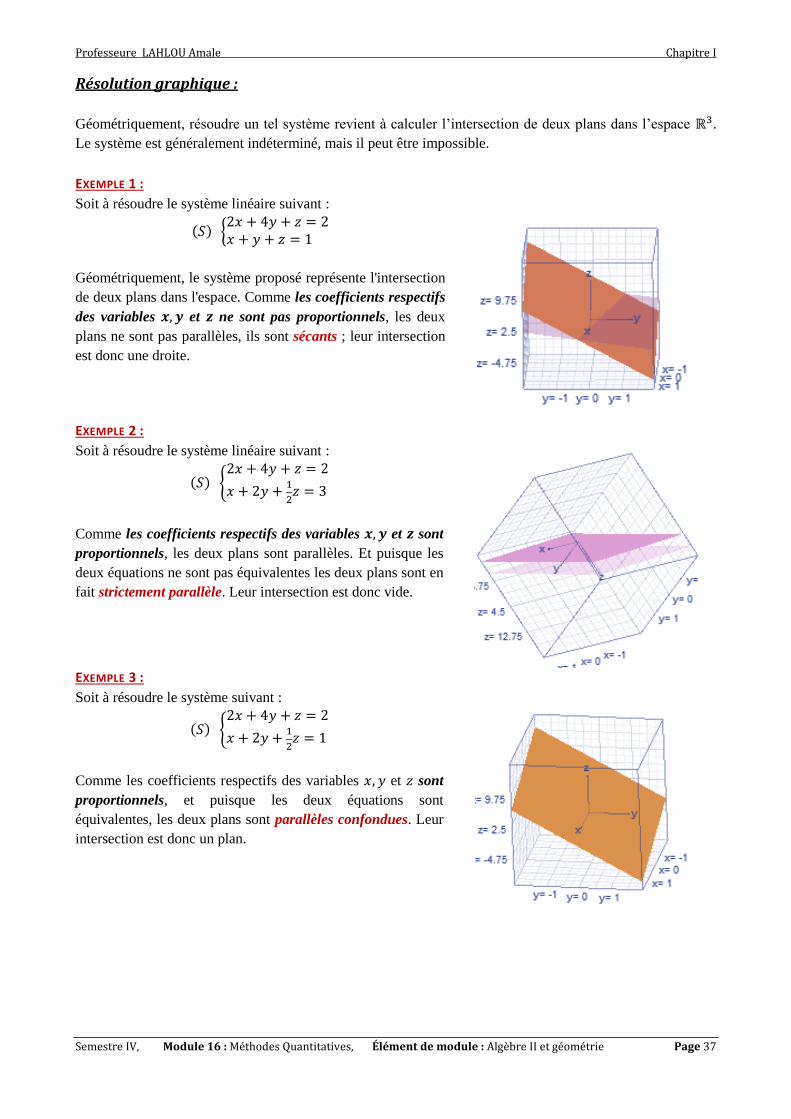
EXEMPLE 1 :
Soit à résoudre le système linéaire suivant :
Géométriquement, le système proposé représente l'intersection
de deux plans dans l'espace. Comme les coefficients respectifs
des variables et ne sont pas proportionnels, les deux
plans ne sont pas parallèles, ils sont sécants ; leur intersection
est donc une droite.
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :
Comme les coefficients respectifs des variables et sont
proportionnels, les deux plans sont parallèles. Et puisque les
deux équations ne sont pas équivalentes les deux plans sont en
fait strictement parallèle. Leur intersection est donc vide.
EXEMPLE 3 :
Soit à résoudre le système suivant :
Comme les coefficients respectifs des variables et sont
proportionnels, et puisque les deux équations sont
équivalentes, les deux plans sont parallèles confondues. Leur
intersection est donc un plan.

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 38
F. Résolution d’un système linéaire de 3 équations à 3 inconnues
Définition :
Un système linéaire de 3 équations à 3 inconnues , et (ou tout simplement un système carré à trois
inconnues) est un système qui peut être écrit sous la forme standard suivante :
où les inconnues , et sont des scalaires réels et les données sont composées par des coefficients
et par les seconds membres pour tout .
Pour un système de 3 équations à 3 inconnues on a trois cas possibles :
Il peut avoir une solution unique (l’intersection de trois plans est un point de l’espace).
il peut se faire que deux des plans soient parallèles, auquel cas le système n’aura pas de solution,
l’un des plans contienne l’intersection des deux autres, auquel cas le système aura une infinité de
solutions.
Un système peut présenter des particularités qui permettent de le résoudre plus rapidement en employant une
méthode adaptée à ces particularités. En particulier, si un système de 3 équations à 3 inconnues présente
deux équations équivalentes, il se ramène alors à un système de deux équations à trois inconnues. Ce système
admet alors une infinité de solutions, que l’on exprime en fonction d’une des trois inconnues. Dans ce cas de
figure, il y a donc plusieurs façons d’exprimer les triplets solutions, suivant l’inconnue que l’on conserve en
paramètre. On présentera dans ce qui suit quelques méthodes de résolution.
Résolution algébrique :
EXEMPLE 1 :
Soit à résoudre le système linéaire suivant :
( )
Le système étant de Cramer puisque , donc admet une et une seule solution.
Par inversion de matrice :
On calcule la matrice inverse de la matrice :
Ainsi,

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 39
Méthode de Cramer :
Le système est de Cramer, on peut appliquer les formules de Cramer :
Ainsi,
Méthode d’élimination (ou encore, méthode du pivot de Gauss) :
Le principe de base consiste à former un système triangulaire (inférieur ou supérieur) équivalent de trois
équations. On garde la variable dans la première équation et on l’élimine dans les deux équations restantes.
Par remontée on calcule les variables,

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 40
Ainsi,
Méthode de substitution :
Pour résoudre un système de 3 équations à 3 inconnues, il est pratique d’exprimer, à l’aide de l’une des trois
équations, une inconnue en fonction des deux autres, puis de remplacer cette inconnue par sa nouvelle
expression dans les deux équations restantes. Ces deux dernières équations forment alors un système de deux
équations à deux inconnues déjà traité.
De la première équation, tirons l’expression de en fonction de et de :
et remplaçons par son expression obtenue dans les deux autres équations. On obtient ainsi un système de
deux équations à deux inconnues et :
Ou encore,
On est donc ramené à résoudre le système :
Entre les deux dernières équations, éliminons par soustraction membre à membre :
On en tire : .
L’équation : donne alors
.
L’équation équivalente à la première équation du système nous donne
Ainsi,
Méthode par combinaisons linéaires :
Eliminons par addition entre les deux dernières équations
Eliminons par addition entre la première et la dernière équation.
Résolvons le système :
En soustrayons membre à membre, ces deux équations, on obtient : ou encore

Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 41
L’équation donne alors
Enfin une des équations du système donné en amont, la première par exemple, donne la valeur de :
Ainsi,
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :
On constate que :
En effet, les deux premières équations du système sont équivalentes. Le système se résume maintenant
en un système de deux équations à trois inconnues,
Ainsi, l’ensemble des solutions est une droite dans l’espace passant par le point
et de vecteur
directeur
:
EXEMPLE 3 :
Soit à résoudre le système linéaire suivant :
On constate que
En effet, la première et la troisième équation du système sont équivalentes. Un système équivalent se
résume en un système de deux équations à trois inconnues,
Ainsi, l’ensemble des solutions est vide :
EXEMPLE 4 :
Soit à résoudre le système linéaire suivant :
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 42
On constate que
En effet, les trois équations du système sont équivalentes. Le système se résume maintenant en un
système d’une seule équation à trois inconnues .
Ainsi, l’ensemble des solutions est un plan dans l’espace passant par le point
et de vecteur
normal
:
Résolution graphique :
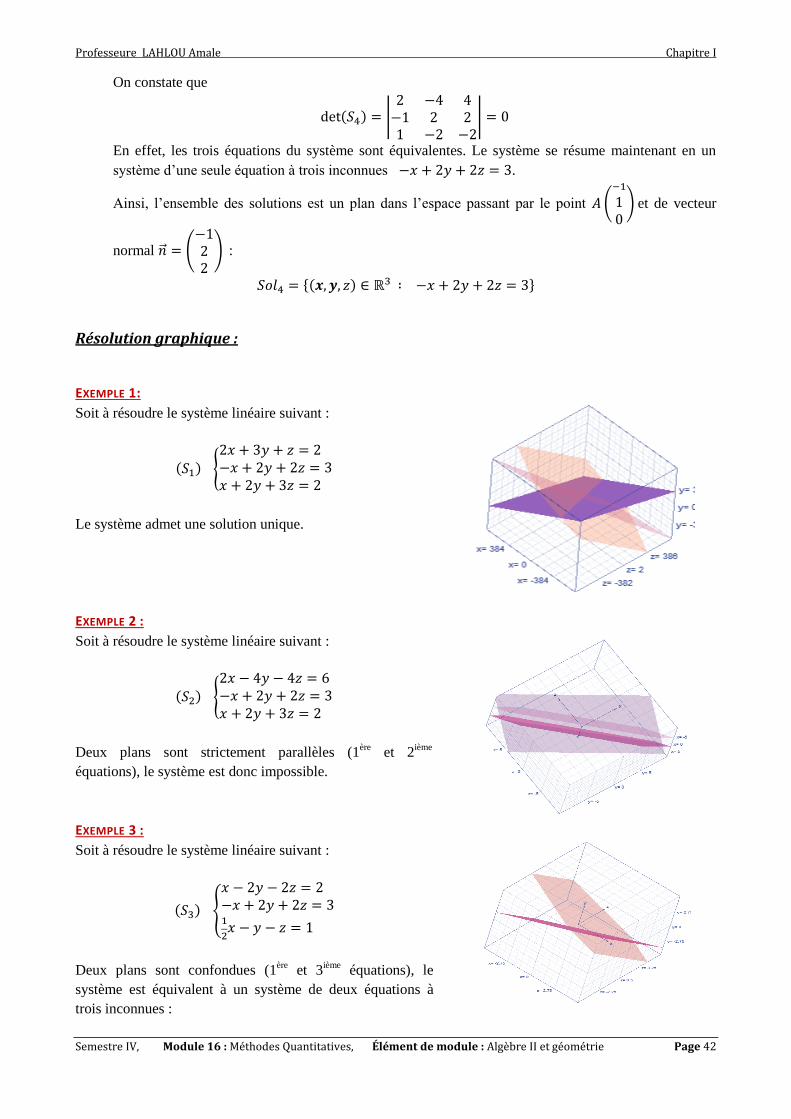
EXEMPLE 1:
Soit à résoudre le système linéaire suivant :
Le système admet une solution unique.
EXEMPLE 2 :
Soit à résoudre le système linéaire suivant :
Deux plans sont strictement parallèles (1ère
et 2ième
équations), le système est donc impossible.
EXEMPLE 3 :
Soit à résoudre le système linéaire suivant :
Deux plans sont confondues (1ère
et 3ième
équations), le
système est équivalent à un système de deux équations à
trois inconnues :
Professeure LAHLOU Amale Chapitre I
Semestre IV, Module 16 : Méthodes Quantitatives, Élément de module : Algèbre II et géométrie Page 43
le système est donc indéterminé : l’ensemble solution est une
droite dans l’espace.
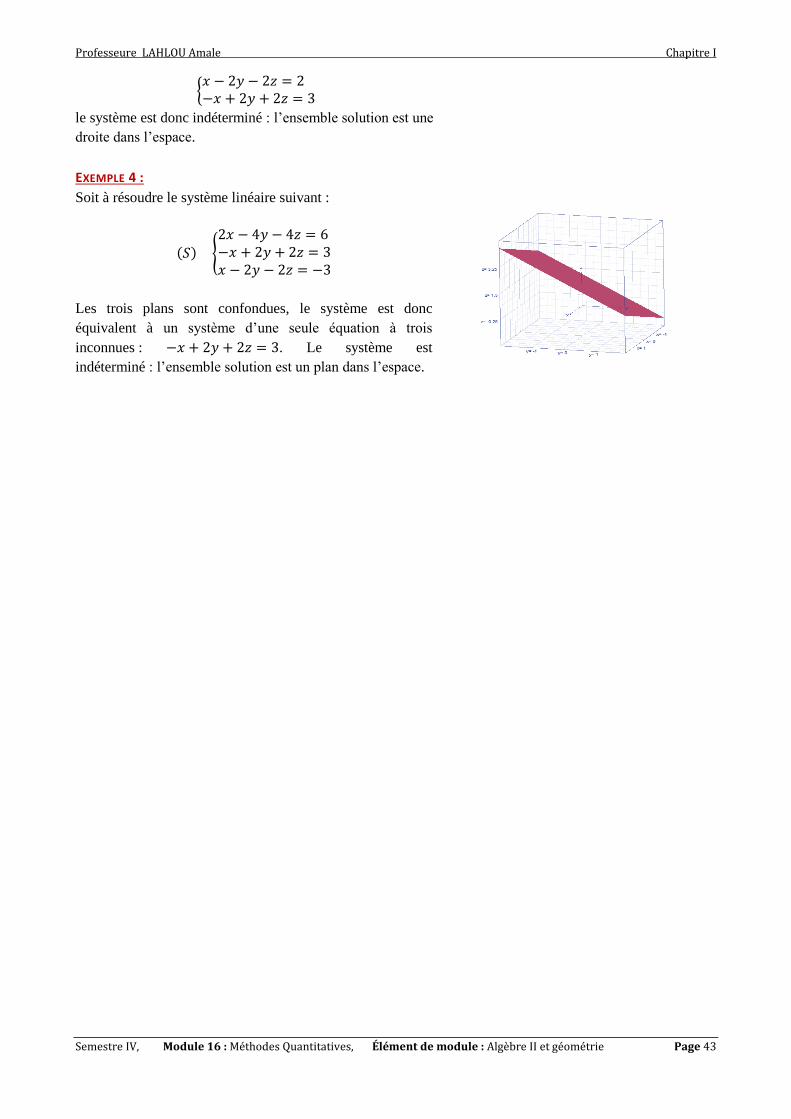
EXEMPLE 4 :
Soit à résoudre le système linéaire suivant :
Les trois plans sont confondues, le système est donc
équivalent à un système d’une seule équation à trois
inconnues : . Le système est
indéterminé : l’ensemble solution est un plan dans l’espace.





























