Embed Size (px)
Citation preview

Table des matieres
1 Les logiciels libres 3
1.1 Qu’est-ce qu’un Logiciel Libre ? . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Qu’est-ce que le copyleft ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Le logiciel Glpk 5
2.1 Qu’est-ce que Glpk ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Ou le trouver ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Comment l’utiliser ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Le logiciel glpsol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4.1 Format Cplex lp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.2 Format mps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.3 Fichier de sortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5 L’interface API . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.6 Le modeleur GNU MathProg . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Le logiciel LP solve 15
3.1 En lignes de commandes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Via l’API . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Via l’IDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 A partir d’un modeleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.5 En bref . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 La suite logiciel COIN-OR 26
4.1 Liste des projets COIN par categorie . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Le projet OSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.3 Le projet CLP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.4 Le projet CBC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.5 Le projet BCP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31

TABLE DES MATIERES 3
4.6 Le projet CGL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.7 Le projet CSDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Le logiciel Abacus 34
5.0.1 Les differentes classes d’ABACUS . . . . . . . . . . . . . . . . . . . . . 34
5.0.2 Structure du programme MSIPND . . . . . . . . . . . . . . . . . . . . 36

Chapitre 1
Les logiciels libres
Texte tire du site http ://www.gnu.org/philosophy/free-sw.fr.html
1.1 Qu’est-ce qu’un Logiciel Libre ?
L’expression ≪ Logiciel libre ≫ fait reference a la liberte et non pas au prix. Pour comprendre
le concept, vous devez penser a la ≪ liberte d’expression ≫, pas a ≪ l’entree libre ≫.
L’expression ≪ Logiciel libre ≫ fait reference a la liberte pour les utilisateurs d’executer, de
copier, de distribuer, d’etudier, de modifier et d’ameliorer le logiciel. Plus precisement, elle
fait reference a quatre types de liberte pour l’utilisateur du logiciel :
– La liberte d’executer le programme, pour tous les usages (liberte 0).
– La liberte d’etudier le fonctionnement du programme, et de l’adapter a vos besoins
(liberte 1). Pour ceci l’acces au code source est une condition requise.
– La liberte de redistribuer des copies, donc d’aider votre voisin, (liberte 2).
– La liberte d’ameliorer le programme et de publier vos ameliorations, pour en faire profiter
toute la communaute (liberte 3). Pour ceci l’acces au code source est une condition
requise.
Un programme est un logiciel libre si les utilisateurs ont toutes ces libertes. Ainsi, vous
etes libre de redistribuer des copies, avec ou sans modification, gratuitement ou non, a tout le
monde, partout. Etre libre de faire ceci signifie (entre autre) que vous n’avez pas a demander
ou a payer pour en avoir la permission.
Vous devez aussi avoir la liberte de faire des modifications et de les utiliser a titre prive
dans votre travail ou vos loisirs, sans en mentionner l’existence. Si vous publiez vos modifica-
tions, vous n’etes pas oblige de prevenir quelqu’un de particulier ou de le faire d’une maniere
particuliere.
Vous pouvez avoir paye pour obtenir une copie d’un logiciel libre ou vous pouvez l’avoir
obtenu gratuitement. Mais indifferemment de la maniere dont vous vous l’etes procure, vous
avez toujours la liberte de copier et de modifier un logiciel et meme d’en vendre des copies.
≪ Logiciel libre ≫ ne signifie pas ≪ non commercial ≫. Un logiciel libre doit etre disponible
pour un usage commercial, pour le developpement commercial et la distribution commerciale.

CHAPITRE 1. LES LOGICIELS LIBRES 5
Le developpement commercial de logiciel libre n’est plus l’exception ; de tels logiciels libres
commerciaux sont tres importants.
Dans le projet GNU, nous utilisons le ≪ copyleft ≫ pour proteger ces libertes. Mais des
logiciels libres non-copyleftes existent aussi. Nous croyons qu’il y a de bonnes raisons qui font
qu’il est mieux d’utiliser le copyleft, mais si votre programme est libre non-copylefte, nous
pouvons tout de meme l’utiliser.
1.2 Qu’est-ce que le copyleft ?
Le Copyleft est une facon de rendre un programme ou tout autre œuvre libre, et qui requiert
que toutes les versions modifiees et etendues du programme soient libres egalement.
La maniere la plus simple de faire d’un programme un logiciel libre est de le distribuer dans
le domaine public, sans copyright. Cela autorise les gens a partager le programme et leurs
ameliorations si le cœur leur en dit. Mais cela autorise aussi des personnes indelicates a faire
du programme un logiciel proprietaire. Ils peuvent tres bien y effectuer des changements, juste
quelques-uns ou plusieurs, et distribuer le resultat comme un logiciel proprietaire. Ceux qui
recevront le programme dans sa forme modifiee n’auront pas la liberte que l’auteur original
leur aura donne ; l’intermediaire l’aura fait disparaıtre.
Dans le projet GNU, notre but est de donner a tous les utilisateurs la liberte de redistribuer
et de modifier les logiciels GNU. Si des intermediaires pouvaient enlever cette liberte, nous
aurions beaucoup d’utilisateurs, mais ils n’auraient aucune liberte. Alors, au lieu de mettre
les logiciels GNU dans le domaine public, nous les mettons sous ≪copyleft≫ ou ≪gauche d’au-
teur≫. Le copyleft indique que quiconque les redistribue, avec ou sans modifications, doit aussi
transmettre la liberte de les copier et de les modifier. Le copyleft garantit cette liberte pour
tous les utilisateurs.
Le copyleft fournit aussi un encouragement aux autres programmeurs qui veulent ajou-
ter des logiciels libres. Des programmes importants comme le compilateur C++ de GNU
n’existent que grace a lui.

Chapitre 2
Le logiciel Glpk
2.1 Qu’est-ce que Glpk ?
Glpk signifie GNU Linear Programming Kit. Il s’agit d’un ensemble d’algorithmes permet-
tant de resoudre differents problemes allant de la programmation lineaire (PL) a la program-
mation lineaire en nombres entiers (PLNE).
Ces deux types de problemes sont tres proche en apparence mais demandent a ce jour des
traitements bien differents.
Resoudre un programme lineaire peut se faire en temps polynomial. Glpk propose les 2
plus celebres algorithmes connus : la methode du simplexe (qui n’est pas polynomiale mais
qui est tres efficace) et une methode de points interieurs (qui est polynomiale).
Resoudre un PLNE est un probleme NP-difficile. Glpk utilise le seul algorithme connu
capable de resoudre efficacement tous les PLNE : la methode de branchement (Branch-and-
Bound) qui est exponentielle dans le pire des cas.
2.2 Ou le trouver ?
Glpk est une partie du GNU Project et est distribuee en logiciel libre a sources disponibles
(free software, open source), sous la licence publique generale GNU qui permet de la redistri-
buer ou de la modifier selon les termes publies par la Free Software Foundation.
Ce document resume les fonctionnalites principales du logiciel glpsol ainsi que les formats
principaux de donnees et de description. Pour obtenir des documents sur la bibliotheque C
API, installer le logiciel sous linux ou windows, avoir acces a une Faq,... vous pouvez acceder
a la page dediee a glpk sur le site general GNU :
http ://www.gnu.org/software/glpk/glpk.html.
1. Telecharger un fichier tar.gz sur http ://ftp.gnu.org/gnu/glpk/

CHAPITRE 2. LE LOGICIEL GLPK 7
(ex : glpk-4.44.tar.gz).
2. Decompresser tar -zxvf glpk-4.44.tar.gz.
3. Les instructions d’installation sont alors dans le fichier INSTALL.
4. Prendre soin de se placer en root.
5. Dans le repertoire glpk-4.44, lancer ./configure.
6. Puis make pour compiler le programme.
7. Puis make check pour tester.
8. Puis make install pour installer le logiciel.
9. L’executable glpsol est alors disponible dans /usr/local/bin/, la bibliotheque libglpk.a
dans /usr/local/lib/ et glpk.h dans /usr/local/include/ .
10. La documentation complete est disponible dans glpk-4.44/doc sous la forme de fichiers
postscripts (glpk.ps, gmpl.ps) ainsi que de nombreux exemples dans glpk-4.44/examples.
2.3 Comment l’utiliser ?
Glpk est code en langage C Ansi et on peut acceder directement aux algorithmes par
une API C (Application Program Interface), c’est-a-dire un ensemble de fonctions C. Il est
egalement possible d’acceder aux fonctionnalites de Glpk a partir d’un logiciel, dit solveur,
appele glpsol. Glpk peut traiter des programmes lineaires fournis sous differents formats (lp,
mps) ou decrits a partir d’un langage specialise, appele modeleur, le GNU MathProg.
Il existe ainsi trois facons d’acceder aux algorithmes de Glpk. Tous les olveurs lineaires
similaires a Glpk possedent ces 3 acces.
Si l’on desire une utilisation optimale, securisee, capable de fonctionner pour des grandes
tailles de problemes, il faut utiliser bien entendu l’interface API. Elle existe a l’origine en C
Ansi mais on peut trouver des interfaces externes pour Java, Delphi ou Glpkmex Matlab.
Pour resoudre des programmes de taille plus reduite, le logiciel glpsol est facile d’utilisation.
Il prend un fichier d’entree sous des formats simples et produit un fichier en retour contenant
le resultat. Il est ainsi possible de creer un logiciel complet utilisant glpsol, c’est-a-dire un
programmant creant le fichier d’entree pour glpsol et lisant son fichier de sortie.
Parmi les fichiers d’entree possible, le format modeleur peut etre tres utile. Un modeleur
decrit le PL ou le PLNE en utilisant une description mathematique assez simple. Ce format
de fichier peut ainsi etre lu par glpsol ou par l’interface API.
2.4 Le logiciel glpsol
Si votre systeme Unix/Linux ou Windows est bien configure, la commande glpsol (sous
un terminal Unix/Linux ou sous une fenetre Dos) vous permet d’acceder au logiciel glpsol.
L’usage de glpsol est glpsol [options...] nomdefichier

8 CHAPITRE 2. LE LOGICIEL GLPK
Avec les options principales suivantes :
--help: permet d’acceder a la liste de toutes les options.
-check: ne lance pas d’algorithme, sert a tester les donees d’entrees
--cpxlp: format Cplex lp pour le fichier d’entree PL ou PLNE nomdefichier
--mps: idem format mps,
--glp: idem format GNU lp
--math: idem format modeleur GNU MathProg.
--wcpxlp fichiersortie: ecrit dans fichiersortie le PL ou le PLNE au format Cplex LP
(idem avec –wmps, –wglp)
-o fichiersortie: ecrit dans fichiersortie l’ensemble des resultats dans un fichier “txt”
Il existe egalement des options specifiques aux algorithmes utilises comme par exemple le
choix entre algorithme du simplexe et des points interieurs, de la base intiale pour la methode
de simplexe ou la strategie de branchement dans le Branch-and-Bound.
Exemples :
glpsol --check --wmps entree.mps --cpxlp entree.lp : transfert du format .lp au for-
mat .mps
glpsol -o solution.txt --cpxlp entree.lp : resout entree.lp et donne la solution dans
sortie.txt
2.4.1 Format Cplex lp
Glpk peut donc lire differents formats d’entree. Le plus simple et le plus repandu a ete
cree pour le logiciel Cplex (Ilog). Il revient a ecrire un PL ou un PLNE sous le format habi-
tuel.Voici un petit exemple de programme lineaire sous le format Cplex lp.
\Problem name: exemple.lp
Maximize
obj: 5 x1 + 7 x2
Subject To
c1: 3 x1 - 2 x2 <= -9
c2: 10 x1 + 6 x2 >= 11
c3: 8 x1 + x2 = -6
Bounds
-Inf <= x1 <= 0
1 <= x2 <= 4
End
Cet exemple se passe de commentaires, mais il faut noter que :
- la premiere ligne, optionnelle, indique un nom de probleme
- les noms de la fonction obj ou des contraintes sont optionnels
- les variables peuvent prendre des noms quelconques
- Si une variable n’a pas borne inferieure dans la section Bounds,
elle est consideree positive ou nulle.
Pour les PL mixtes ou entiers, on ajoute une section.
- Integers contenant la liste des variables entieres
- Binary contenant la liste des variables binaires
2.4.2 Format mps
* Problem: UNKNOWN
* Class: LP
* Rows: 3
* Columns: 2

CHAPITRE 2. LE LOGICIEL GLPK 9
* Non-zeros: 6
* Format: Fixed MPS
*
NAME
ROWS
N R0000000
L R0000001
G R0000002
E R0000003
COLUMNS
C0000001 R0000000 5 R0000001 3
C0000001 R0000002 10 R0000003 8
C0000002 R0000000 7 R0000001 -2
C0000002 R0000002 6 R0000003 1
RHS
RHS1 R0000001 -9 R0000002 11
RHS1 R0000003 -6
BOUNDS
MI BND1 C0000001
UP BND1 C0000001 0
LO BND1 C0000002 1
UP BND1 C0000002 4
ENDATA
2.4.3 Fichier de sortie
Glpsol peut fournir en sortie un fichier .txt donnant la solution du PL ou du PLNE.Le tableau suivant est le fichier .txt correspondant au programme precedent. Il indique le
statut de la solution (optimale ou irrealisable) et la valeur de la fonction objective optimale.Dans le cas d’un PLNE, une valeur supplementaire finissant par (LP) est en fait la valeur duPLNE relaxee des contraintes d’integrite. .
Problem:
Rows: 3
Columns: 2
Non-zeros: 6
Status: OPTIMAL
Objective: obj = 21.75 (MAXimum)
No. Row name St Activity Lower bound Upper bound Marginal
------ ------------ -- ------------- ------------- ------------- -------------
1 c1 B -11.75 -9
2 c2 B 11.5 11
3 c3 NS -6 -6 = 0.625
No. Column name St Activity Lower bound Upper bound Marginal
------ ------------ -- ------------- ------------- ------------- -------------
1 x1 B -1.25 0

10 CHAPITRE 2. LE LOGICIEL GLPK
2 x2 NU 4 1 4 6.375
Les deux sections concernent les contraintes/lignes (Rows) et les variables/colonnes (Co-
lumns), pour lesquelles sont indiquees :
No le numero des contraintes et des variables
Row (Column) name le nom des contraintes et de variables
St: le statut de la ligne/colonne : B=en base (pour la variable ou la variable d’ecart associee
a la contrainte), NF NL NU NS=Hors-base libre, a borne inf, a borne sup ou valeur fixee.
Activity: Valeur d’activite de la ligne/colonne dans la solution : pour les lignes, c’est la
somme des variables fois leurs coefficients et pour les variables, c’est leur valeur.
Lower/Upper bound: sans commentaire.
Marginal: pour les variables hors-base, c’est le cout reduit.
2.5 L’interface API
On peut acceder directement aux algorithmes par une API C (Application Program Inter-
face), c’est-a-dire un ensemble de fonctions C.
#include <stdio.h>
#include </usr/local/include/glpk.h>
int main()
{
LPX *lp; /* le probleme */
int ia[6+1];
int ja[6+1];
double ar[6+1];
double x1, x2, z;
/* creation du probleme */
lp = lpx_create_prob();
/* le nom du probleme - facultatif */
lpx_set_prob_name(lp, "exemple");
/* c’est un probleme de maximisation */
lpx_set_obj_dir(lp, LPX_MAX);
/* le nom de la fonction objective - facultatif */
lpx_set_obj_name(lp, "obj");
/* on ajoute 3 contraintes et 2 variables */
lpx_add_rows(lp,3);

CHAPITRE 2. LE LOGICIEL GLPK 11
lpx_add_cols(lp,2);
/* les noms des contraintes et des variables */
/* attention les indices commencent a 1 */
lpx_set_row_name(lp, 1, "c1");
lpx_set_row_name(lp, 2, "c2");
lpx_set_row_name(lp, 3, "c3");
lpx_set_col_name(lp, 1, "x1");
lpx_set_col_name(lp, 2, "x2");
/* les coefficients de la fonction objective */
lpx_set_obj_coef(lp, 1, 5.0);
lpx_set_obj_coef(lp, 2, 7.0);
/* le type et le 2e membre de contraintes */
lpx_set_row_bnds(lp, 1, LPX_UP, 0.0, -9.0);
lpx_set_row_bnds(lp, 2, LPX_LO, 11.0, 0.0);
lpx_set_row_bnds(lp, 3, LPX_FX, -6.0, -6.0);
// LPX_FR : -inf < x < +inf
// LPX_LO : lb <= x < +inf
// LPX_UP : -inf < x <= ub
// LPX_DB : lb <= x <= ub
// LPX_FX : lb = x = ub
/* les bornes des variables */
lpx_set_col_bnds(lp, 1, LPX_UP, 0.0, 0.0);
lpx_set_col_bnds(lp, 2, LPX_DB, 1.0, 4.0);
/* preparation de la matrice */
ia[1]=1; ja[1]=1; ar[1]=3.0; //a[1,1]=3
ia[2]=1; ja[2]=2; ar[2]=-2.0; //a[1,2]=-2
ia[3]=2; ja[3]=1; ar[3]=10.0; //a[2,1]=10
ia[4]=2; ja[4]=2; ar[4]=6.0; //a[2,2]=6
ia[5]=3; ja[5]=1; ar[5]=8.0; //a[3,1]=8
ia[6]=3; ja[6]=2; ar[6]=1.0; //a[3,1]=1
/* chargement de la matrice */
lpx_load_matrix(lp, 6, ia, ja, ar);
/* ecriture du pb dans un fichier pour verification */
//lpx_write_lpt(lp, "toto.lpt");
lpx_write_mps(lp, "toto.mps");

12 CHAPITRE 2. LE LOGICIEL GLPK
/* resoudre le probleme par l’algo du simplexe */
lpx_simplex(lp);
/* recuperation des resultats */
x1 = lpx_get_col_prim(lp, 1);
x2 = lpx_get_col_prim(lp, 2);
z = lpx_get_obj_val(lp);
printf("Solution :\n");
printf("x1 = %.2f\n x2 = %.2f\n z = %.2f\n",x1,x2,z);
/* sauvegarde des solutions dans un fichier */
lpx_print_sol(lp, "solution_LIN.txt");
/* resoudre le probleme par l’algo des points-interieurs */
lpx_interior(lp);
/* sauvegarde des solutions dans un fichier */
lpx_print_ips(lp, "solution_PI.txt");
/* resoudre en entier */
lpx_integer(lp);
/* recuperation des resultats */
x1 = lpx_mip_col_val(lp, 1);
x2 = lpx_mip_col_val(lp, 2);
z = lpx_mip_obj_val(lp);
printf("Solution entiere :\n");
printf("x1 = %.2f\n x2 = %.2f\n z = %.2f\n",x1,x2,z);
/* sauvegarde des solutions dans un fichier */
lpx_print_mip(lp, "solution_MIP.txt");
glp_delete_prob(lp);
return 0;
}
et le makefile associe
PREFIX = /usr/local
CC=gcc
CFLAGS = -Wall -I$(PREFIX)/include
LDFLAGS = -L$(PREFIX)/lib
LDLIBS = -lglpk

CHAPITRE 2. LE LOGICIEL GLPK 13
exemple: exemple.o
2.6 Le modeleur GNU MathProg
Le langage-modeleur GNU MathProg est une partie du langage AMPL. Il s’agit d’un lan-
gage de description d’un PL sous un format assez naturel. En fait, ce format permet de diviser
un PL entre sa structure et ses donnees. Pour l’utiliser, glpsol necessite ainsi plusieurs op-
tions :
--math: pour indiquer que le fichier est dans ce format
--data fichierdata: indique le fichier des donnees
--display filename: redirige la sortie vers un fichier
Pour comprendre ce qu’est un modeleur, prenons le celebre exemple de Dantzig (1963) :
trouver le cout minimal de transport en respectant les demandes des clients et de l’approvi-
sionnement des usines. La description du probleme dans un fichier de format “modeleur” se
comprend elle-meme :
Fichier transport.math
set I;
/* I est l’ensemble des usines de production */
set J;
/* J est l’ensemble des clients */
param a{i in I};
/* a[i] est la capacite de production de l’usine i en nombre de caisses */
param b{j in J};
/* b[j] est la demande du client j en nombre de caisses */
param d{i in I, j in J};
/* d[i,j] est la distance en milliers de kilometres entre une usine i et un client j */
param f;
/* f est le cout de transport en dollars par caisse et par milliers de kilometre */
param c{i in I, j in J} := f * d[i,j] / 1000;
/* c[i,j] est le cout de transport en Kilo-dollars par caisse de l’usine i au client j */
var x{i in I, j in J} >= 0;
/* x[i,j] est une variable de decision egale au nombre de caisses tranportees de l’usine
i vers le client j */
/* Si on veut les variables x entieres, on ecrit: var x{i in I, j in J} >= 0, integer; */
minimize cost: sum{i in I, j in J} c[i,j] * x[i,j];
/* Objectif: cout total de transport minimum en kilo-dollars */
s.t. CteCapacite{i in I}: sum{j in J} x[i,j] <= a[i];

14 CHAPITRE 2. LE LOGICIEL GLPK
/* Contrainte due a la capacite max de production de chaque usine i */
s.t. CteDemande{j in J}: sum{i in I} x[i,j] >= b[j];
/* Contrainte due a la demande de chaque client j */
Dans un deuxieme fichier, on place les donnees de l’instance du probleme. Notez que les
dimensions du probleme ne sont pas donnees dans le fichier de description.
Fichier transport.data
data;
set I := Seattle San-Diego;
set J := New-York Chicago Topeka;
param a := Seattle 350
San-Diego 600;
param b := New-York 325
Chicago 300
Topeka 275;
param d : New-York Chicago Topeka :=
Seattle 2.5 1.7 1.8
San-Diego 2.5 1.8 1.4 ;
param f := 90;
end;
En fait un meme fichier de description produira autant de PL ou PLNE qu’il y a de fichiers
de donnees associes. Un fichier modeleur plus un fichier de donnees permet aisni a glpsol de
generer un PL ou un PLNE. On peut visualiser le resultat par exemple en ecrivant le PL ou
PLNE au format Cplex lp avec
glpsol --check --wcpxlp transport.lp --data transport.data.lp --math
transport.math
Ce langage est tres riche, pour en maıtriser les finesses, le fichier lang.ps, qui est fourni
avec les fichiers d’installation, contient une description complete du langage. Mais cette
generation par fichier de description reste neanmoins une etape potentiellement couteuse
pour un probleme de tres grande taille et il est preferable d’utiliser directement l’interface
API dans ce cas.
Le fichier lp cree est le suivant :
\* Problem: transport *\
Minimize
cost: + 0.225 x(Seattle,New~York) + 0.153 x(Seattle,Chicago)

CHAPITRE 2. LE LOGICIEL GLPK 15
+ 0.162 x(Seattle,Topeka) + 0.225 x(San~Diego,New~York)
+ 0.162 x(San~Diego,Chicago) + 0.126 x(San~Diego,Topeka)
Subject To
CteCapacite(Seattle): + x(Seattle,New~York) + x(Seattle,Chicago)
+ x(Seattle,Topeka) <= 350
CteCapacite(San~Diego): + x(San~Diego,New~York) + x(San~Diego,Chicago)
+ x(San~Diego,Topeka) <= 600
CteDemande(New~York): + x(Seattle,New~York) + x(San~Diego,New~York)
>= 325
CteDemande(Chicago): + x(Seattle,Chicago) + x(San~Diego,Chicago) >= 300
CteDemande(Topeka): + x(Seattle,Topeka) + x(San~Diego,Topeka) >= 275
End
et une fois resolu avec la commande glpsol -o sol.txt --cpxlp transport.lp
Problem:
Rows: 5
Columns: 6
Non-zeros: 12
Status: OPTIMAL
Objective: cost = 153.675 (MINimum)
No. Row name St Activity Lower bound Upper bound Marginal
------ ------------ -- ------------- ------------- ------------- -------------
1 CteCapacite(Seattle)
B 300 350
2 CteCapacite(San~Diego)
NU 600 600 < eps
3 CteDemande(New~York)
NL 325 325 0.225
4 CteDemande(Chicago)
NL 300 300 0.153
5 CteDemande(Topeka)
NL 275 275 0.126
No. Column name St Activity Lower bound Upper bound Marginal
------ ------------ -- ------------- ------------- ------------- -------------
1 x(Seattle,New~York)
B 0 0
2 x(Seattle,Chicago)
B 300 0
3 x(Seattle,Topeka)
NL 0 0 0.036
4 x(San~Diego,New~York)
B 325 0
5 x(San~Diego,Chicago)
NL 0 0 0.009
6 x(San~Diego,Topeka)
B 275 0

Chapitre 3
Le logiciel LP solve
Lp solve est un logiciel libre de la Free Software Foundation (licence GNU lesser general
public license). Lp solve est un logiciel de resolution de programmes lineaires et programmes
lineaires en nombres entiers. Ce solveur est base sur la methode revisee du simplexe et une
methode de type Branch-and-Bound pour les PLNE.
Lp solve est ecrit en langage C ANSI et peut etre compile sous differentes plateformes
comme linux et windows. Toutes les sources sont disponibles, ainsi que de nombreux exemples
et des manuels sur le site http ://lpsolve.sourceforge.net/5.5/. Lp solve a ete developpe par
Michel Berkelaar de l’universite de technologie de Eindhoven. Ces travaux ont ete ameliores
par Jeroen Dirks, Kjell Eikland, Peter Notebaert et Juergen Ebert. La participations de tous
est souhaitee comme pour les autres logiciels libres.
3.1 En lignes de commandes
Aucune installation n’est necessaire pour utiliser lp solve en ligens de commandes. Il suffit
de telecharger et de decompresser le fichier lp solve 5.5.2.0 exe.tar.gz qui peut etre compiler
a la fois sous Windows et sous Linux. Les fichiers obtenus sont lp solve.exe (Windows) et
lp solve (Unix/Linux).
Lp solve accepte en entree les fichiers de style lp ou mps.
En utilisant un fichier mps :
lp solve -max -mps exemple.mps
En utilisant un fichier lp :
lp solve exemple.lp
lp solve -h pour obtenir de l’aide.
Usage of lp_solve version 5.5.0.13:
lp_solve [options] [[<]input_file]
List of options:
-h prints this message
-lp read from LP file (default)
-mps read from MPS file in fixed format

CHAPITRE 3. LE LOGICIEL LP SOLVE 17
-fmps read from MPS file in free format
-rxli xliname filename
read file with xli library
-rxlidata datafilename
data file name for xli library
-rxliopt options
options for xli library
-rbas filename read basis from filename
-rpar filename read parameters from filename
-rparopt options
options for parameter file:
-H headername: header name for parameters. By default ’Default’
-wlp filename write to LP file
-wmps filename write to MPS file in fixed format
-wfmps filename write to MPS file in free format
-wxli xliname filename
write file with xli library
-wxliopt options
options for xli library
-wxlisol xliname filename
write solution file with xli library
-wxlisolopt options
options for xli library
-wbas filename write basis to filename
-wpar filename write parameters to filename
-wparopt options
options for parameter file:
-H headername: header name for parameters. By default ’Default’
-wafter Write model after solve (useful if presolve used).
-parse_only parse input file but do not solve
-nonames Ignore variables and constraint names
-norownames Ignore constraint names
-nocolnames Ignore variable names
-min Minimize the lp problem (overrules setting in file)
-max Maximize the lp problem (overrules setting in file)
-r <value> specify max nbr of pivots between a re-inversion of the matrix
-piv <rule> specify simplex pivot rule
-piv0: Select first
-piv1: Select according to Dantzig
-piv2: Select Devex pricing from Paula Harris (default)
-piv3: Select steepest edge
These pivot rules can be combined with any of the following:
-pivf In case of Steepest Edge, fall back to DEVEX in primal

18 CHAPITRE 3. LE LOGICIEL LP SOLVE
-pivm Multiple pricing. See set_pivoting
-piva Temporarily use First Index if cycling is detected
-pivr Adds a small randomization effect to the selected pricer
-pivll Scan entering/leaving columns left rather than right
-pivla Scan entering/leaving columns alternatingly left/right
-pivh Use Harris’ primal pivot logic rather than the default
-pivt Use true norms for Devex and Steepest Edge initializations
-o0 Don’t put objective in basis
-o1 Put objective in basis (default)
-s <mode> <scaleloop> use automatic problem scaling
-s0: No scaling
-s1: Geometric scaling (default)
-s2: Curtis-reid scaling
-s3: Scale to convergence using largest absolute value
-s:
-s4: Numerical range-based scaling
-s5: Scale to convergence using logarithmic mean of all values
-s6: Scale based on the simple numerical range
-s7: Scale quadratic
These scaling rules can be combined with any of the following:
-sp also do power scaling
-si also do Integer scaling (default)
-se also do equilibration to scale to the -1..1 range (default)
-presolve presolve problem before start optimizing (rows+columns)
-presolverow presolve problem before start optimizing (rows only)
-presolvecol presolve problem before start optimizing (columns only)
-presolvel also eliminate linearly dependent rows
-presolves also convert constraints to SOSes (only SOS1 handled)
-presolver If the phase 1 solution process finds that a constraint is
redundant then this constraint is deleted
-presolvek Simplification of knapsack-type constraints through
addition of an extra variable, which also helps bound the OF
-presolveq Direct substitution of one variable in 2-element equality
constraints; this requires changes to the constraint matrix
-presolvef Identify implied free variables (releasing their expl. bounds)
-presolveg Reduce (tighten) coef. in integer models based on GCD argument
-presolveb Attempt to fix binary variables at one of their bounds
-presolvec Attempt to reduce coefficients in binary models
-presolverowd Idenfify and delete qualifying constraints that
are dominated by others, also fixes variables at a bound
-presolvecold Deletes variables (mainly binary), that are dominated
by others (only one can be non-zero)
-C <mode> basis crash mode See set_basiscrash
-C0: No crash basis

CHAPITRE 3. LE LOGICIEL LP SOLVE 19
-C2: Most feasible basis
-C3: Least degenerate basis
-prim Prefer the primal simplex for both phases
-dual Prefer the dual simplex for both phases
-simplexpp Set Phase1 Primal, Phase2 Primal
-simplexdp Set Phase1 Dual, Phase2 Primal
-simplexpd Set Phase1 Primal, Phase2 Dual
-simplexdd Set Phase1 Dual, Phase2 Dual
-degen use perturbations to reduce degeneracy,
can increase numerical instability
-degenc use column check to reduce degeneracy
-degend dynamic check to reduce degeneracy
-degenf anti-degen fixedvars
-degens anti-degen stalling
-degenn anti-degen numfailure
-degenl anti-degen lostfeas
-degeni anti-degen infeasible
-degenb anti-degen B&B
-degenr anti-degen Perturbation of the working RHS at refactorization
-degenp anti-degen Limit bound flips
-trej <Trej> set minimum pivot value
-epsd <epsd> set minimum tolerance for reduced costs
-epsb <epsb> set minimum tolerance for the RHS
-epsel <epsel> set tolerance for rounding values to zero
-epsp <epsp> set the value that is used as perturbation scalar for
degenerative problems See set_epsperturb
-improve <level> iterative improvement level
-improve0: none
-improve1: Running accuracy measurement of solved equations on Bx=r
-improve2: Improve initial dual feasibility by bound flips (default)
-improve4: Low-cost accuracy monitoring in the dual
-improve8: check for primal/dual feasibility at the node level
-timeout <sec> Timeout after sec seconds when not solution found
-bfp <filename> Set basis factorization package
-noint Ignore integer restrictions
-e <number> specifies the tolerance which is used to determine whether a
floating point number is in fact an integer.
Should be < 0.5
-g <number>
-ga <number> specifies the absolute MIP gap for branch-and-bound
This specifies the absolute allowed tolerance
on the object function. Can result in faster solving times.
-gr <number> specifies the relative MIP gap for branch-and-bound

20 CHAPITRE 3. LE LOGICIEL LP SOLVE
This specifies the relative allowed tolerance
on the object function. Can result in faster solving times.
-f specifies that branch-and-bound algorithm stops at first found
solution
-b <bound> specify a lower bound for the objective function
to the program. If close enough, may speed up the
calculations.
-o <value> specifies that branch-and-bound algorithm stops when objective
value is better than value See set_break_at_value
-c
-cc during branch-and-bound, take the ceiling branch first
-cf during branch-and-bound, take the floor branch first
-ca during branch-and-bound, the algorithm chooses branch
-depth <limit> set branch-and-bound depth limit See set_bb_depthlimit
-n <solnr> specify which solution number to return See set_solutionlimit
-B <rule> specify branch-and-bound rule See set_bb_rule
-B0: Select Lowest indexed non-integer column (default)
-B1: Selection based on distance from the current bounds
-B2: Selection based on the largest current bound
-B3: Selection based on largest fractional value
-B4: Simple, unweighted pseudo-cost of a variable
-B5: This is an extended pseudo-costing strategy based on minimizing
the number of integer infeasibilities
-B6: This is an extended pseudo-costing strategy based on maximizing
the normal pseudo-cost divided by the number of infeasibilities.
Similar to (the reciprocal of) a cost/benefit ratio
These branch-and-bound rules can be combined with any of the following:
-Bw WeightReverse branch-and-bound
-Bb BranchReverse branch-and-bound
-Bg Greedy branch-and-bound
-Bp PseudoCost branch-and-bound
-Bf DepthFirst branch-and-bound
-Br Randomize branch-and-bound
-BG GubMode branch-and-bound
-Bd Dynamic branch-and-bound
-Bs RestartMode branch-and-bound
-BB BreadthFirst branch-and-bound
-Bo Order variables to improve branch-and-bound performance
-Bc Do bound tightening during B&B based of reduced cost info
-Bi Initialize pseudo-costs by strong branching
-time Print CPU time to parse input and to calculate result
-v <level> verbose mode, gives flow through the program
if level not provided (-v) then -v4 (NORMAL) is taken.

CHAPITRE 3. LE LOGICIEL LP SOLVE 21
-v0: NEUTRAL
-v1: CRITICAL
-v2: SEVERE
-v3: IMPORTANT (default)
-v4: NORMAL
-v5: DETAILED
-v6: FULL
-t trace pivot selection
-d debug mode, all intermediate results are printed,
and the branch-and-bound decisions
-R report information while solving the model See put_msgfunc
-Db <filename> Do a generic readable data dump of key lp_solve model variables
before solve
Principally for run difference and debugging purposes
-Da <filename> Do a generic readable data dump of key lp_solve model variables
after solve
Principally for run difference and debugging purposes
-i print all intermediate valid solutions. See set_print_sol
Can give you useful solutions even if the total run time
is too long
-ia print all intermediate (only non-zero values) valid solutions
Can give you useful solutions even if the total run time
is too long
-S <detail> Print solution. If detail omitted, then -S2 is used.
-S0: Print nothing
-S1: Only objective value See print_objective
-S2: Obj value+variables (default) See print_solution
-S3: Obj value+variables+constraints See print_constraints
-S4: Obj value+variables+constraints+duals
-S5: Obj value+variables+constraints+duals+lp model
-S6: Obj value+variables+constraints+duals+lp model+scales
-S7: Obj value+variables+constraints+duals+lp model+scales+lp tableau
3.2 Via l’API
L’API (Application Programming Interface) est un ensemble de routines pouvant etre uti-
lisees a partir d’un programme C/C++, Java, Delphi, Pascal, VB, C#,...
Un exemple de programme C/C++
#include "lp_lib.h"
int demo()

22 CHAPITRE 3. LE LOGICIEL LP SOLVE
{
lprec *lp;
int Ncol, *colno = NULL, j, ret = 0;
REAL *row = NULL;
/* We will build the model row by row
So we start with creating a model with 0 rows and 2 columns */
Ncol = 2; /* there are two variables in the model */
lp = make_lp(0, Ncol);
if(lp == NULL)
ret = 1; /* couldn’t construct a new model... */
if(ret == 0) {
/* let us name our variables. Not required, but can be useful
for debugging */
set_col_name(lp, 1, "x");
set_col_name(lp, 2, "y");
/* create space large enough for one row */
colno = (int *) malloc(Ncol * sizeof(*colno));
row = (REAL *) malloc(Ncol * sizeof(*row));
if((colno == NULL) || (row == NULL))
ret = 2;
}
if(ret == 0) {
set_add_rowmode(lp, TRUE); /* makes building the model faster
if it is done rows by row */
/* construct first row (120 x + 210 y <= 15000) */
j = 0;
colno[j] = 1; /* first column */
row[j++] = 120;
colno[j] = 2; /* second column */
row[j++] = 210;
/* add the row to lpsolve */
if(!add_constraintex(lp, j, row, colno, LE, 15000))
ret = 3;
}
if(ret == 0) {

CHAPITRE 3. LE LOGICIEL LP SOLVE 23
/* construct second row (110 x + 30 y <= 4000) */
j = 0;
colno[j] = 1; /* first column */
row[j++] = 110;
colno[j] = 2; /* second column */
row[j++] = 30;
/* add the row to lpsolve */
if(!add_constraintex(lp, j, row, colno, LE, 4000))
ret = 3;
}
if(ret == 0) {
/* construct third row (x + y <= 75) */
j = 0;
colno[j] = 1; /* first column */
row[j++] = 1;
colno[j] = 2; /* second column */
row[j++] = 1;
/* add the row to lpsolve */
if(!add_constraintex(lp, j, row, colno, LE, 75))
ret = 3;
}
if(ret == 0) {
set_add_rowmode(lp, FALSE); /* rowmode should be turned off again when
done building the model */
/* set the objective function (143 x + 60 y) */
j = 0;
colno[j] = 1; /* first column */
row[j++] = 143;
colno[j] = 2; /* second column */
row[j++] = 60;
/* set the objective in lpsolve */
if(!set_obj_fnex(lp, j, row, colno))

24 CHAPITRE 3. LE LOGICIEL LP SOLVE
ret = 4;
}
if(ret == 0) {
/* set the object direction to maximize */
set_maxim(lp);
/* just out of curioucity, now show the model in lp format on screen */
/* this only works if this is a console application. If not, use
write_lp and a filename */
write_LP(lp, stdout);
/* write_lp(lp, "model.lp"); */
/* I only want to see important messages on screen while solving */
set_verbose(lp, IMPORTANT);
/* Now let lpsolve calculate a solution */
ret = solve(lp);
if(ret == OPTIMAL)
ret = 0;
else
ret = 5;
}
if(ret == 0) {
/* a solution is calculated, now lets get some results */
/* objective value */
printf("Objective value: %f\n", get_objective(lp));
/* variable values */
get_variables(lp, row);
for(j = 0; j < Ncol; j++)
printf("%s: %f\n", get_col_name(lp, j + 1), row[j]);
/* we are done now */
}
/* free allocated memory */
if(row != NULL)
free(row);
if(colno != NULL)
free(colno);

CHAPITRE 3. LE LOGICIEL LP SOLVE 25
if(lp != NULL) {
/* clean up such that all used memory by lpsolve is freed */
delete_lp(lp);
}
return(ret);
}
int main()
{
demo();
}
Lors de l’execution, on obtient :
/* Objective function */
max: +143 x +60 y;
/* Constraints */
+120 x +210 y <= 15000;
+110 x +30 y <= 4000;
+x +y <= 75;
Objective value: 6315.625000
x: 21.875000
y: 53.125000
3.3 Via l’IDE
Il existe a present un programme appele LPSolve IDE et disponible sous Windows pour
donner un environnement graphique permettant un acces facile a Lp solve. Il utilise l’API
pour acceder au logiciel Lp solve. Il est alors inutile de connaitre la programmation ou les
commandes de l’API. Cette interface donne le modele au solveur et retourne le resultat.
Facile a installer, il suffit de telecharger le fichier lp solve 5.5.2.0 IDE Setup.exe sur le site
http ://lpsolve.sourceforge.net/5.5/ .
Il suffit de taper le modele sous l’onglet ”Source” sous le meme format que l’exemple suivant
et de cliquer sur la fleche verte pour lancer la resolution.
/* Objective function */
max 5 x1 + 7 x2;
3 x1 - 2 x2 <= -9;
10 x1 + 6 x2 >= 11;
8 x1 + x2 = -6;

26 CHAPITRE 3. LE LOGICIEL LP SOLVE
/* Variable bounds */
-Inf <= x1 <=0;
1<= x2 <= 4;
Toutes les fonctionnalites de Lp solve sont accessibles a partir de l’interface graphique.
– Tout est graphique et controlable par la souris.
– Peut convertir le modele sous un autre format.
– Permet de modifier le modele tres facilement.
– Lecture facile des resultats.
– Controle facile des options.
– Permet d’exporter le modele ou les resultats aux formats HTML, RTF, LaTeX.
– Montre des statistiques sur le modele.
3.4 A partir d’un modeleur
Plusieurs modeleurs disposent d’une interface permettant d’utiliser lp solve comme solveur
lineaire :
– AMPL
– MATLAB
– O-Matrix
– Scilab
– Python
– ...
Par exemple, pour utiliser lp solve a partir du modeleur ampl, il suffit de rajouter une
option dans la ligne de commande ampl.
ampl : model diet.mod;
ampl : data diet.mod;
ampl : option solver lpsolve;
ampl : solve;
3.5 En bref
Lp solve
– est un solveur de PL et PLNE
– n’est pas limite en taille de probleme
– est libre est open source
– peut lire les formats MPS et LP
– possede une interface API
– est facilement utilisable par d’autres languages de programmation
– donne la possibilite de convertir un format en un autre
– permet d’utiliser l’analyse de sensibilite

Chapitre 4
La suite logiciel COIN-OR
COIN-OR (COmputational INfrastructure for Operations Research) est un projet pour
le developpement des logiciels open-source a destination de la communaute de Recherche
Operationnelle.
Le site http ://www.coin-or.org/ regroupe les differents logiciels ainsi que des explications
claires sur leur utilite, leur fonctionnement, ainsi que de nombreux exemples.
Sous l’onglet ”Projects”, on retgrouve la liste des differents projets inclus dans COIN-OR.
Chaque projet est cliquable et ce qui nous amene a une premiere page de description du
projet presentant ses liens avec les autres projets. Une autre page propre a chaque projet
(http ://projects.coin-or.org/Nom projet/) donne les instructions d’installation et les docu-
mentations necessaires a son utilisation.

28 CHAPITRE 4. LA SUITE LOGICIEL COIN-OR
4.1 Liste des projets COIN par categorie
Developer tools
– BuildTools : COIN-OR Unix developer tools and documentation, tools for managing
configuration and compilation of various COIN-OR projects under Linux, Unix, and
Cygwin
– CoinBinary : COIN-OR Binary Distributions, pre-compiled binary distributions of COIN-
OR projects
– CoinWeb : COIN-OR Web Services, COIN-OR Web pages, Subversion, Trac, etc.
– TestTools : TestTools, Python scripts to automatically download, configure, build, test,
and install COIN-OR projects
Graphs
– CGC : COIN-OR Graph Classes, a collection of network representations and algorithms
Interfaces
– CoinMP : CoinMP, a lightweight API and DLL for CLP, CBC, and CGL
– GAMSlinks : GAMS/COIN-OR Links, links between GAMS (General Algebraic Mode-
ling System) and solvers that are hosted at COIN-OR
– NLPAPI : Nonlinear Programming API, a subroutine interface for defining and solving
nonlinear programming problems
– OS : Optimization Services, standards for representing optimization instances, results,
solver options, and communication between clients and solvers in a distributed environ-
ment using Web Services
– OSI : Open Solver Interface, a uniform API for calling embedded linear and mixed-integer
programming solvers
– SMI : Stochastic Modeling Interface, for optimization under uncertainty
Metaheuristics
– OTS : Open Tabu Search, a framework for constructing tabu search algorithms
Modeling systems
– FLOPC++ : FLOPC++, an algebraic modeling language embedded in C++
– GAMSlinks : GAMS/COIN-OR Links, links between GAMS (General Algebraic Mode-
ling System) and solvers that are hosted at COIN-OR
– OS : Optimization Services, standards for representing optimization instances, results,
solver options, and communication between clients and solvers in a distributed environ-
ment using Web Services
Optimization convex non-differentiable
– OBOE : Oracle Based Optimization Engine, optimization of convex problems with user-
supplied methods delivering key first order information (like support to the feasible set,
support to the objective function)

CHAPITRE 4. LA SUITE LOGICIEL COIN-OR 29
Optimization deterministic linear continuous
– CLP : COIN-OR LP, a simplex solver
– CoinMP : CoinMP, a lightweight API and DLL for CLP, CBC, and CGL
– DyLP : Dynamic LP, an implementation of the dynamic simplex methods
– FLOPC++ : FLOPC++, an algebraic modeling language embedded in C++
– OSI : Open Solver Interface, a uniform API for calling embedded linear and mixed-integer
programming solvers
– VOL : Volume Algorithm, a subgradient algorithm that also computes approximate
primal solutions
Optimization deterministic linear discrete
– BCP : Branch-Cut-Price Framework, a framework for constructing parallel branch-cut-
price algorithms for mixed-integer linear programs
– CBC : COIN-OR Branch and Cut, an LP-based branch-and-cut library
– CGL : Cut Generator Library, a library of cutting-plane generators
– CHiPPS : COIN-OR High Performance Parallel Search Framework, a framework for
constructing parallel tree search algorithms (includes an LP-based branch-cut-price im-
plementation)
– SYMPHONY : SYMPHONY, a callable library for solving mixed-integer linear programs
Optimization deterministic nonlinear
– DFO : Derivative-Free Optimization, a package for solving general nonlinear optimization
problems when derivatives are unavailable
– Ipopt : Interior-Point Optimizer, for general large-scale nonlinear optimization
– NLPAPI : Nonlinear Programming API, a subroutine interface for defining and solving
nonlinear programming problems
– SVM-QP : Support Vector Machine Quadratic Programming, support vector machine
quadratic programming
Optimization deterministic nonlinear discrete
– Bonmin : Basic Open-source Nonlinear Mixed INteger programming, an experimental
open-source C++ code for solving general MINLP (Mixed Integer NonLinear Program-
ming) problems
– LaGO : Lagrangian Global Optimizer, for the global optimization of nonconvex mixed-
integer nonlinear programs
Optimization deterministic semidefinite continuous
– CSDP : CSDP, an interior-point method for semidefinite programming
Optimization stochastic
– SMI : Stochastic Modeling Interface, for optimization under uncertainty

30 CHAPITRE 4. LA SUITE LOGICIEL COIN-OR
Optimization utility
– CoinUtils : COIN-OR utilities, utilities, data structures, and linear algebra methods for
COIN-OR projects
– CppAD : CppAD, a tool for differentiation of C++ functions
– OS : Optimization Services, standards for representing optimization instances, results,
solver options, and communication between clients and solvers in a distributed environ-
ment using Web Services
Web services
– OS : Optimization Services, standards for representing optimization instances, results,
solver options, and communication between clients and solvers in a distributed environ-
ment using Web Services

CHAPITRE 4. LA SUITE LOGICIEL COIN-OR 31
4.2 Le projet OSI
Un API (Application Program Interface) unifie pour les solveurs de PL et PLNE de COIN-
OR tels que CLP, BCP, CBC, ABACUS,... ou exterieurs a COIN tels que CPLEX, GLPK,
MOSEK, OSL, SoPlex, SYMPHONY, XPRESS-MP,...
4.3 Le projet CLP
CLP (COIN-OR LP) est un solveur lineaire base sur l’algorithme du simplexe.
CLP is a high quality open-source LP solver. Its main strengths are its Dual and Primal
Simplex algorithms. It also has a barrier algorithm for Linear and Quadratic objectives. There
are limited facilities for Nonlinear and Quadratic objectives using the Simplex algorithm. It
is available as a library and as a standalone solver.
#include "ClpSimplex.hpp"
int main (int argc, const char *argv[])
{
ClpSimplex model;
int status;
if (argc<2)
status=model.readMps("../../Data/Sample/p0033.mps");
else
status=model.readMps(argv[1]);
if (!status) {
model.primal();
}
return 0;
}
4.4 Le projet CBC
CBC (COIN-OR Branch-and-Cut) est une bibliotheque portant sur les algorithmes de
coupes et branchements pour la resolution des programmes lineaires en nombres entiers.
CBC is an open-source MILP solver. It uses many of the COIN components and is designed
to be used with CLP or dylp. It is available as a library and as a standalone solver.
#include "CbcModel.hpp"
// Using as solver
#include "OsiClpSolverInterface.hpp"
int main (int argc, const char *argv[])

32 CHAPITRE 4. LA SUITE LOGICIEL COIN-OR
{
OsiClpSolverInterface solver1;
// Read in example model
// and assert that it is a clean model
int numMpsReadErrors = solver1.readMps("../../Data/Sample/p0033.mps","");
assert(numMpsReadErrors==0);
// Pass data and solver to CbcModel
CbcModel model(solver1);
// uncomment to reduce printout
//model.setLogLevel(1);
//model.solver()->setHintParam(OsiDoReducePrint,true,OsiHintTry);
// Do complete search
model.branchAndBound();
/* Print solution. CbcModel clones solver so we
need to get current copy */
int numberColumns = model.solver()->getNumCols();
const double * solution = model.solver()->getColSolution();
for (int iColumn=0;iColumn<numberColumns;iColumn++) {
double value=solution[iColumn];
if (fabs(value)>1.0e-7&&model.solver()->isInteger(iColumn))
printf("%d has value %g\n",iColumn,value);
}
return 0;
}
4.5 Le projet BCP
BCP (Branch-and-Cut-and-Price) est une structure aidant au developpement d’algorithmes
de generation de coupes, generation de colonnes et branchements permettant la resolution de
programmes linaires en nombres entiers ou mixtes.
BCP is a parallel framework for implementing branch, cut, and price algorithms for solving
mixed integer programs (MIPs). BCP provides the user with an object-oriented framework
that can be used to develop an efficient problem class specific MIP solver without all the
implementational effort. involved with implementing a branch and bound framework from
scratch.
What is Branch-Cut-Price (BCP) ?
BCP is a parallel framework for implementing branch, cut, and price algorithms for solving
mixed integer programs (MIPs). BCP provides the user with an object-oriented framework
that can be used to develop an efficient problem class specific MIP solver without all the

CHAPITRE 4. LA SUITE LOGICIEL COIN-OR 33
implementational effort. involved with implementing a branch and bound framework from
scratch.
Who should use BCP?
Because BCP is an open-source framework, users have the flexibility to customize any as-
pect of their BCP algorithm. BCP is appropriate for researchers who would like to experiment
with different MIP formulations, new cut and/or variable generation techniques, branching
strategies, etc., as well as power users who would like to solve intractable problems in a parallel
environment.
How do I get it and how do I install it ?
You should read the InstallationAndGettingStarted document.
How is BCP parallelized ?
BCP processes the Branch-and-Bound search tree nodes in parallel by employing a mas-
ter/slave model. BCP is designed for a distributed network via a message passing protocol
(currently PVM, or a serial version).
Is there any alternative to BCP?
SYMPHONY is a very similar open-source, parallel branch, cut, and price framework im-
plemented in C. SYMPHONY compiles under MSVC++ and can also be compiled for shared
memory architectures with an OpenMP compliant compiler. It has a more simplified interface
and may be a better option for some users.
4.6 Le projet CGL
CGL (Cut Generator Library) est une bibliotheque d’algorithmes de generation de coupes.
The COIN-OR Cut Generation Library (Cgl) is an open collection of cutting plane imple-
mentations (”cut generators”) for use in teaching, research, and applications. Cgl can be used
with other COIN-OR packages that make use of cuts, such as the mixed-integer linear pro-
gramming solver Cbc. Each cut generator has its own Maintainer who leads the development
of its functionality, testing, and documentation. See below for a listing of available generators.
All the generators are combined in one library when Cgl is compiled. New contributions are
welcome.
– Combinatorial cuts :
o CglAllDifferent
o CglClique
o CglKnapsackCover
o CglOddHole
– Flow cover cuts :
o CglFlowCover
– Gomory cuts and variants :
o CglGomory
o CglRedSplit

34 CHAPITRE 4. LA SUITE LOGICIEL COIN-OR
– Lift-and-project cuts :
o CglLiftAndProject
o CglLandP
– Mixed integer rounding cuts and variants :
o CglMixedIntegerRounding
o CglMixedIntegerRounding2
o CglTwomir
o CglResidualCapacity
– Strengthening :
o CglDuplicateRow
o CglPreprocess
o CglProbing
o CglSimpleRounding
4.7 Le projet CSDP
CSDP est une methode de point interieur pour la programmation semi-definie.

Chapitre 5
Le logiciel Abacus
Avec glpk et lp solve -> nombre de variables et nombre de contraintes polnomial.
Mais comment gerer des formulations avec par exemple un nombre de contraintes expo-
nentiel ?
Probleme de voyageur de commerce ou probleme du sous-graphe 2 arete-connexe ?
Une solution parmi beaucoup d’autres : ABACUS ABACUS=A Branch And CUt System
Abacus fait depuis peu parti des projets COIN-OR. Abacus n’est pas un solveur lineaire.
C’est une interface entre l’utilisateur et le solveur. Initialement le solveur utilise etait Cplex,
mais depuis quelques mois, depuis l’entree de Abacus dans le projet COIN-OR, Abacus utilse
l’interface OSI et peut donc utiliser plusieurs solveurs comme CLP (le solveur de COIN-OR).
ABACUS est un logiciel fournissant une trame pour l’implementation d’algorithmes de
separation et evaluation (Branch-and-Bound Algorithms) qui peuvent etre completes par une
generation automatique de coupes (Branch-and-Cut Algoritms), ou de colonnes (Branch-
and-Price Algorithms), ainsi que de combinaisons de ces methodes. ABACUS a initialement
ete developpe par Stefan Thienel. Le fonctionnement d’ABACUS repose sur les concepts de
la programmation orientee objet avec le langage C++. ABACUS est implemente comme
une collection de classes C++. L’implementation d’un programme de resolution se fait en
derivant certaines classes d’ABACUS et en redefinissant certaines methodes de ces classes.
Cette demarche permet d’introduire dans le programme de resolution d’un probleme, des
algorithmes specifiques au dit probleme.
5.0.1 Les differentes classes d’ABACUS
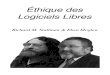
L’implementation d’une nouvelle application avec ABACUS passe par la derivation de
certaines classes propres au logiciel et la redefinition de certaines methodes. La figure 5.1
presente le diagramme de classes donnant les relations entre les principales classes du logiciel.
Toutes les classes du logiciel ABACUS derivent d’une meme classe appelee ABA ABACUSROOT.
La classe ABA MASTER est la classe centrale du programme. Elle controle le processus d’opti-
misation. Elle gere les principaux parametres du probleme. Pour chaque nouvelle application,
une classe propre au probleme doit deriver de cette classe. Tous les objets qui ont besoin d’un

36 CHAPITRE 5. LE LOGICIEL ABACUS
ABA SUB
ABA GLOBAL
ABA MASTER ABA CONSTRAINTABA VARIABLE
ABA ABACUSROOT
ABA CONVAR
Figure 5.1 Diagramme de classes d’ABACUS
acces a des informations globales du probleme devront posseder un pointeur sur l’instance de
la classe ABA MASTER correspondante.
La classe ABA SUB represente un sous-probleme c’est-a-dire un nœud de l’arbre de branche-
ment. Lorsque l’optimisation commence, le nœud racine doit etre initialise avec un objet de
la classe ABA SUB.
ABACUS propose des concepts de base pour la representation des variables et des con-
traintes. La classe ABA VARIABLE represente les variables du probleme. La classe ABA CONSTRAINT
decrit les differentes contraintes. Les variables et les contraintes sont stockees dans des pools.

CHAPITRE 5. LE LOGICIEL ABACUS 37
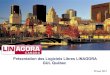
5.0.2 Structure du programme MSIPND
L’implementation du programme de resolution du probleme MSIPND a necessite la cretation
de classes derivees des classes specifiques d’ABACUS et la surcharge de differentes methodes.
La figure 5.2 donne une vue d’ensemble des differentes classes du programme.
ABA SUB
ABA GLOBAL
ABA MASTER
C MSIPNDmaster C MSIPNDsub C var arete C ctecoupesom
C ctecoupe
C ctepartition
C ctecutcycle
C cteSpartition
ABA CONSTRAINTABA VARIABLE
ABA ABACUSROOT
ABA CONVAR
Figure 5.2 Diagramme de classes du programme MSIPND
La classe C var arete est derivee de la classe ABA VARIABLE. Elle permet de preciser les at-
tributs specifiques aux variables de notre application. On definit par exemple que les variables
sont en 0-1 pour notre probleme.
Pour chaque classe de contraintes (contraintes de coupes reduites a un sommet, de coupes,
de partition, de coupe-cycle et d’etoile-partition), nous avons cree une classe specifique (C ctecoupesom,
C ctecoupe, C ctepartition, C ctecutcycle, C cteSpartition). Pour chacune de ces nou-
velles classes, nous avons surcharg les methodes coeff(), genRow() et slack(). La surcharge
de ces methodes permet d’acceler le programme.
La classe C MSIPNDmaster est derivee de la classe ABA MASTER. Cette classe contient entre
autres les methodes initializeOptimization() et initializeParameters() ainsi que la
definition des pools de contraintes.
La classe C MSIPNDsub est derivee de la classe ABA SUB. Les instances de cette classes
representent les nœuds du probleme. Parmi les methodes de cette classe, on peut remarquer
la methode feasible() qui teste la faisabilite d’une solution, la methode separate() qui
permet de gerer la generation de coupes. Les differentes procedures de separation pour les
differentes classes de contraintes sont des methodes de cette classe.
Pour un acces rapide a ces classes, nous avons partage le programme en differents fichiers

38 CHAPITRE 5. LE LOGICIEL ABACUS
situes dans le repertoire principal :
– MSIPNDmain.cpp contient le programme principal,
– MSIPNDmaster.h et MSIPNDmaster.cpp contiennent les attributs et les methodes de la
classe C MSIPNDmaster,
– var arete.h et var arete.cpp contiennent les attributs et les methodes de la classe
C var arete,
– MSIPNDsub.h et MSIPNDsub.cpp.
Pour chaque classe de contraintes, nous avons trois fichiers differents : un fichier .h et un
.cpp contenant les attributs et les methodes de la classe associee au type de contraintes et
un fichier .cpp contenant les procedures de separation associees a la classe de contraintes. La
declaration de ces dernieres methodes se trouvant dans le fichier MSIPNDsub.h.
En resume, nous avons les fichiers suivant :
– pour les contraintes de coupe reduites a un sommet :
ctecoupesom.h et ctecoupesom.cpp,
– pour les contraintes de coupe :
ctecoupe.h, ctecoupe.cpp et MSIPNDsubcoupe.cpp,
– pour les contraintes de partition :
ctepartition.h, ctepartition.cpp et MSIPNDsubpartition.cpp,
– pour les contraintes de coupe-cycle :
ctecutcycle.h, ctecutcycle.cpp et MSIPNDsubcutcycle.cpp,
– pour les contraintes d’etoile-partition :
cteSpartition.h, cteSpartition.cpp et MSIPNDsubSpartition.cpp,
Les instances de notre probleme peuvent etre modelisees sous forme de graphes. La struc-
ture de graphe utilisee est situee dans le repertoire graphe. Ce repertoire contient differents
fichiers :
– graphe.h et graphe.cpp contenant la structure de graphe,
– goldberg.cpp contenant l’implementation de l’algorithme de Goldberg et Tarjan qui est
utilisee pour la separation des contraintes de coupes,
– barahona.cpp contenant l’implementation de l’algorithme de Barahona pour la separation
des contraintes de partition,
– reduction.cpp contenant l’implementation des differentes operations de reduction de
graphes definies dans la section ??.
Les deux autres repertoires entree et sortie contiennent respectivement les instances du
probleme que nous avons traitees et les solutions obtenues a l’aide de notre algorithme.
Un makefile est egalement fourni pour permettre de compiler le programme. Les fichiers
lance sont de petits scripts permettant de lancer l’execution des jeux d’essais.
Le repertoire MSIPND contient egalement un fichier de parametres intitule
.mes parametres abacus dans lequel nous pouvons preciser differents parametres qu’ils soient
propres a ABACUS comme la strategie de branchement, le temps limite d’execution du pro-
gramme, ou qu’ils soient lies a notre implementation comme ceux permettant de definir quelles
classes de contraintes le programme doit considerer.