Embed Size (px)
Citation preview
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 1/40
CFPT SENEGAL/JAPON
KEBE 1
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 2/40
GENERALITES SUR LES SYSTEMESAUTOMATISES
Dans son évolution, l’homme a toujours senti le besoind’économiser des efforts et du temps pour son bien être et pours’occuper d’autres activités. Il a ainsi inventé des outils et destechniques qu’il n’a jamais cessées de perfectionner. Il a ainsiutilisé l’énergie animale, puis l’esclavage et maintenant lesmultiples ressources naturelles existantes.La mécanisation s’est particulièrement développée au XIXe, tandisque le XXe siècle a vu le développement de l’automatisation et del’informatique.L’évolution de l’allègement des tâches de l’homme peut être
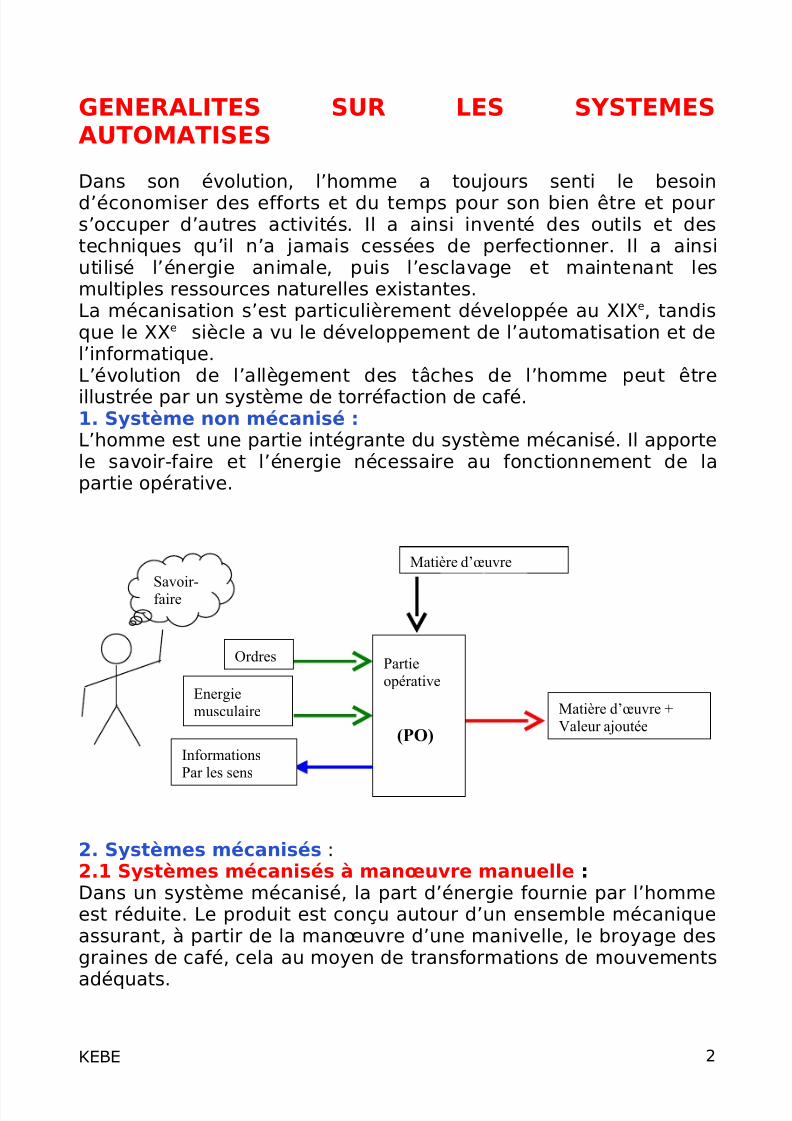
illustrée par un système de torréfaction de café.1. Système non mécanisé :L’homme est une partie intégrante du système mécanisé. Il apportele savoir-faire et l’énergie nécessaire au fonctionnement de lapartie opérative.
2. Systèmes mécanisés :2.1 Systèmes mécanisés à manœuvre manuelle :Dans un système mécanisé, la part d’énergie fournie par l’hommeest réduite. Le produit est conçu autour d’un ensemble mécaniqueassurant, à partir de la manœuvre d’une manivelle, le broyage desgraines de café, cela au moyen de transformations de mouvements
adéquats.
KEBE 2
Matière d’œuvre
Partie
opérative
(PO)
Matière d’œuvre +
Valeur ajoutée
Ordres
Energie
musculaire
Informations
Par les sens
Savoir-faire
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 3/40
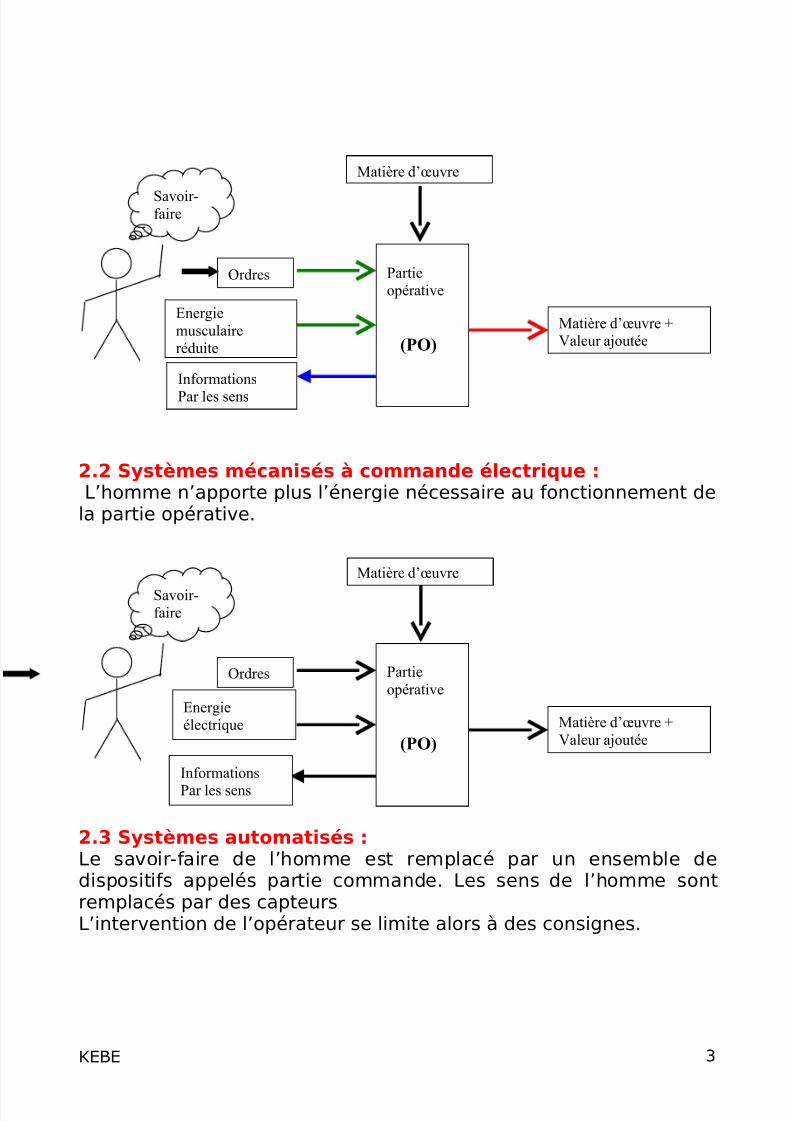
2.2 Systèmes mécanisés à commande électrique :L’homme n’apporte plus l’énergie nécessaire au fonctionnement de
la partie opérative.
2.3 Systèmes automatisés :Le savoir-faire de l’homme est remplacé par un ensemble dedispositifs appelés partie commande. Les sens de l’homme sontremplacés par des capteursL’intervention de l’opérateur se limite alors à des consignes.
KEBE 3
Matière d’œuvre
Partie
opérative
(PO)
Matière d’œuvre +
Valeur ajoutée
Ordres
Energie
électrique
Savoir-
faire
Informations
Par les sens
Matière d’œuvre
Partie
opérative
(PO)
Matière d’œuvre +
Valeur ajoutée
Ordres
Savoir-faire
Energie
musculaire
réduite
Informations
Par les sens
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 4/40
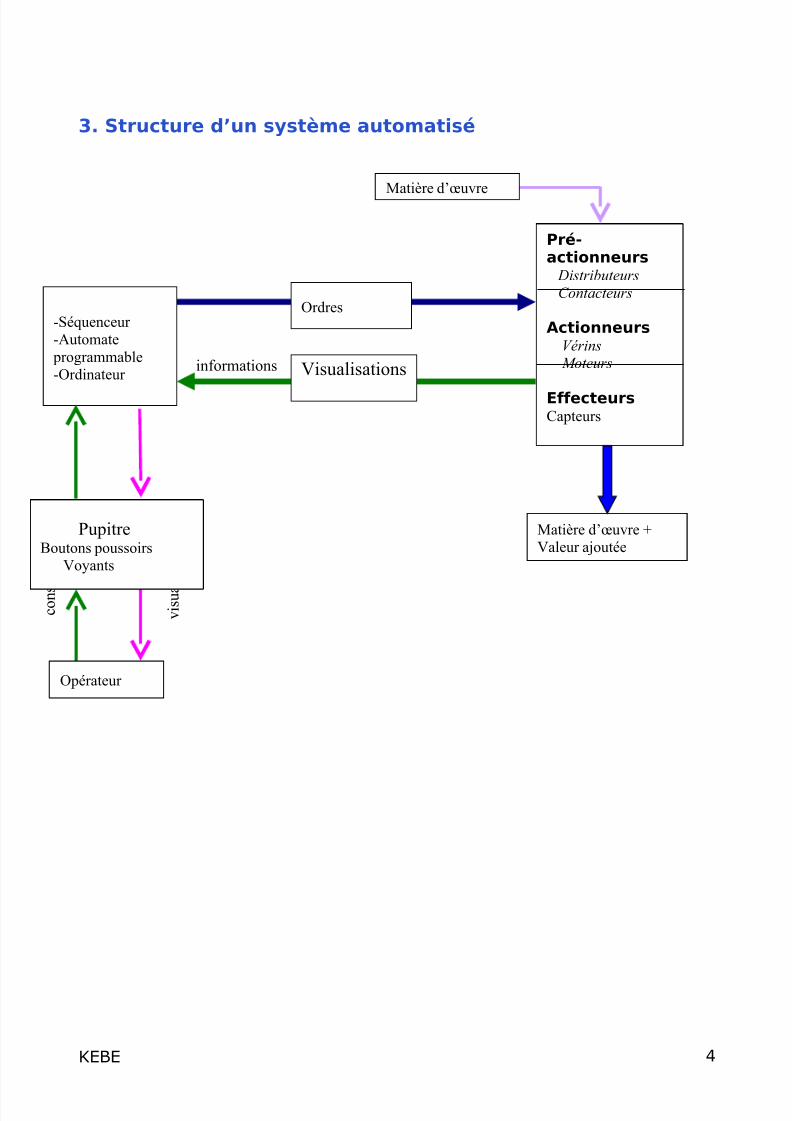
3. Structure d’un système automatisé
KEBE 4
informations
Ordres
Visualisations
Pré-actionneurs Distributeurs
Contacteurs
ActionneursVérins
Moteurs
EffecteursCapteurs
-Séquenceur
-Automate
programmable
-Ordinateur
Matière d’œuvre
Matière d’œuvre +
Valeur ajoutée
c o n s
i g n e s
v i
s u a
l i
s a
t i
o n
Opérateur
PupitreBoutons poussoirs
Voyants
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 5/40
EQUIPEMENTS DE FORCE MOTRICE
1. Caractéristiques générales :Dans un équipement de force motrice l’ensemble des circuits et des
matériels associés est utilisé pour assurer:- la commande- le contrôle- la protectiond’un ou plusieurs récepteurs qui sont toujours des moteurs
2. Contraintes du cahier des charges:La conception de tout équipement doit prendre en compte lesdonnées du cahier des charges qui précise:
- Les caractéristiques de grandeur et de forme du couple résistant(TR)- Les conditions d’exploitation de l’ensemble “Equipement- Moteur-Machine”- Les caractéristiques du réseau de distribution d’énergie.Exemple: Extrait du cahier des charges relatif à une unité debroyage dans une carrière pour matériaux de construction:…Le broyeur principal qui fonctionne en régime continu, présenteun couple résistant de forme hyperbolique de 1800N au décollage.
Il est accouplé à un réducteur mécanique de rapport 1/15.Sa vitessede rotation est de 100tr/mn.Implanté au voisinage de la carrière, le broyeur est dans desconditions d’ambiance difficile: intempéries, poussières, vibrationsmécaniques.Un réseau de distribution BT triphasé 4 fils dessert le chantier.
3. Choix du moteur:Ce choix dépend des trois facteurs mis en évidence par le cahier
des charges:*Les conditions de fonctionnement de la machine entraînée: naturedu cycle de marche; couple de décollage (TR) à l’arrêt; vitessenominale et c…*Les conditions locales d’exploitation: température; atmosphèreetc…*Les caractéristiques du réseau de distribution d’énergie électrique3.1 Conditions de fonctionnement:
KEBE 5
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 6/40
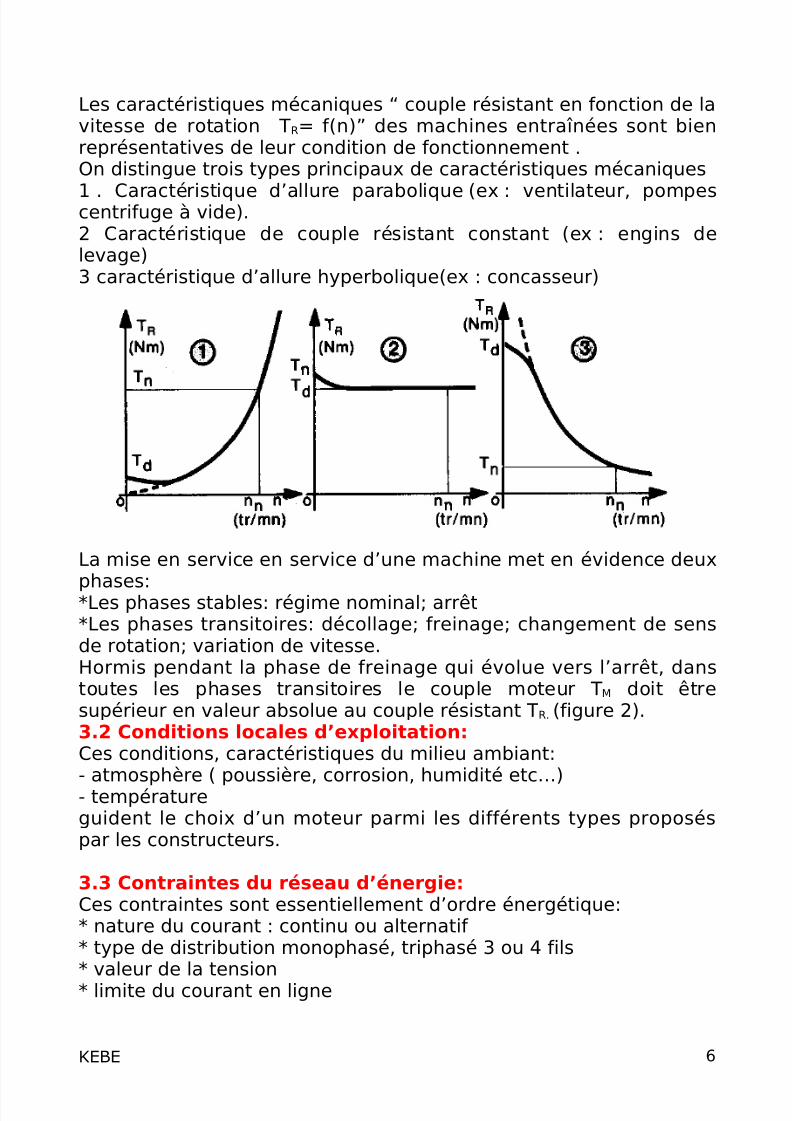
Les caractéristiques mécaniques “ couple résistant en fonction de lavitesse de rotation TR= f(n)” des machines entraînées sont bienreprésentatives de leur condition de fonctionnement .On distingue trois types principaux de caractéristiques mécaniques
1 . Caractéristique d’allure parabolique (ex : ventilateur, pompescentrifuge à vide).2 Caractéristique de couple résistant constant (ex : engins delevage)3 caractéristique d’allure hyperbolique(ex : concasseur)
La mise en service en service d’une machine met en évidence deux
phases:*Les phases stables: régime nominal; arrêt*Les phases transitoires: décollage; freinage; changement de sensde rotation; variation de vitesse.Hormis pendant la phase de freinage qui évolue vers l’arrêt, danstoutes les phases transitoires le couple moteur TM doit êtresupérieur en valeur absolue au couple résistant TR. (figure 2).3.2 Conditions locales d’exploitation:Ces conditions, caractéristiques du milieu ambiant:
- atmosphère ( poussière, corrosion, humidité etc…)- températureguident le choix d’un moteur parmi les différents types proposéspar les constructeurs.
3.3 Contraintes du réseau d’énergie:Ces contraintes sont essentiellement d’ordre énergétique:* nature du courant : continu ou alternatif * type de distribution monophasé, triphasé 3 ou 4 fils* valeur de la tension* limite du courant en ligne
KEBE 6
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 7/40
sont imposées à l’utilisateur et sont déterminant dans le choix dumoteur.
4. Problème de démarrage de l’ensemble “moteur -machine”:Le branchement du moteur sur le réseau peut se réaliser:- soit sans perturbation pour les autres récepteurs et sans
détérioration du moteur: dans ce cas le démarrage directs’impose .
- soit avec perturbation à la fois pour le réseau et les autresrécepteurs.
L’équipement de force motrice doit assurer le démarrage suivant un
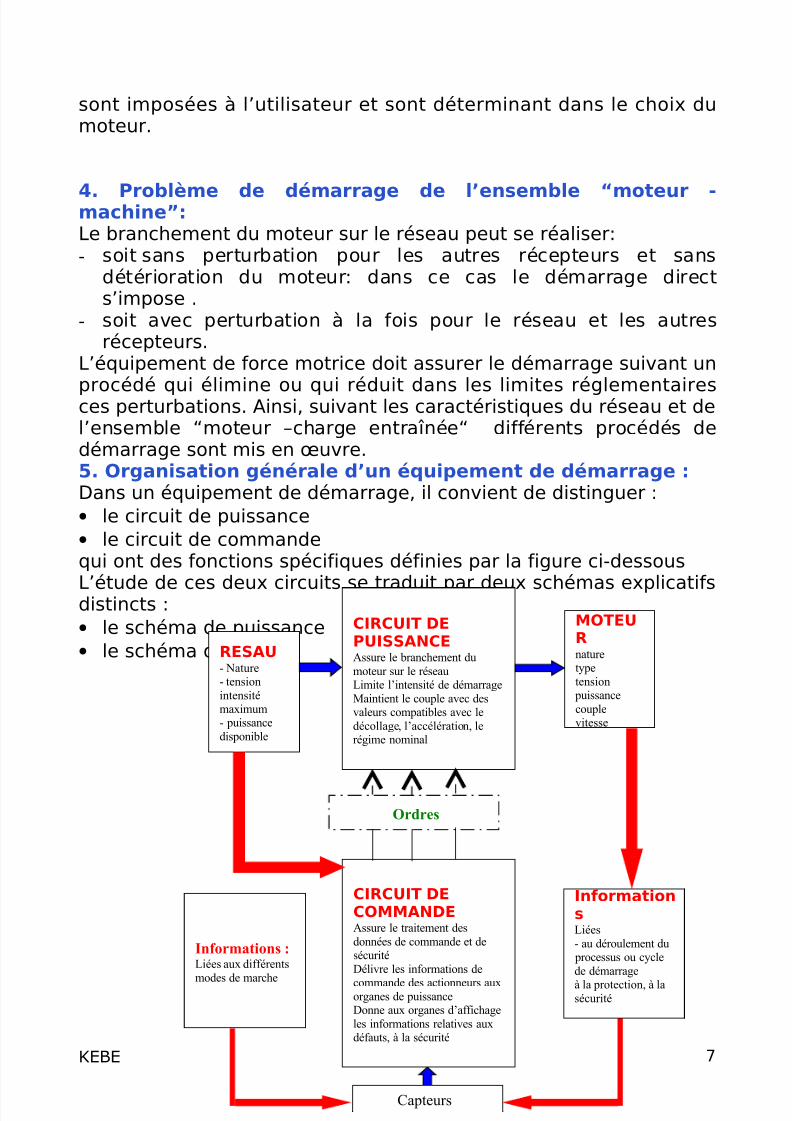
procédé qui élimine ou qui réduit dans les limites réglementairesces perturbations. Ainsi, suivant les caractéristiques du réseau et del’ensemble “moteur –charge entraînée“ différents procédés dedémarrage sont mis en œuvre.5. Organisation générale d’un équipement de démarrage :Dans un équipement de démarrage, il convient de distinguer :
• le circuit de puissance
• le circuit de commandequi ont des fonctions spécifiques définies par la figure ci-dessous
L’étude de ces deux circuits se traduit par deux schémas explicatifsdistincts :
• le schéma de puissance
• le schéma de commande
KEBE 7
Informations :Liées aux différents
modes de marche
InformationsLiées
- au déroulement du processus ou cycle
de démarrageà la protection, à la
sécurité
CIRCUIT DEPUISSANCEAssure le branchement du
moteur sur le réseauLimite l’intensité de démarrage
Maintient le couple avec desvaleurs compatibles avec le
décollage, l’accélération, lerégime nominal
RESAU- Nature- tension
intensitémaximum- puissance
disponible
MOTEURnaturetype
tension puissance
couplevitesse
Capteurs
CIRCUIT DECOMMANDEAssure le traitement des
données de commande et desécurité
Délivre les informations de
commande des actionneurs auxorganes de puissanceDonne aux organes d’affichage
les informations relatives auxdéfauts, à la sécurité
Ordres
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 8/40
6. Structure logique du circuit de commande :Le circuit de commande reçoit des informations de commande, decontrôle et de sécurité. Il enregistre et assure le traitement desdonnées correspondantes. Ainsi, il transmet aux organes decommande des actionneurs les ordres nécessaires aufonctionnement de la partie puissance de l’équipement.Pour satisfaire à ces différentes fonctions, le circuit de commande
fait appel à différentes formes de logique : 6.1 La logique combinatoire :A une combinaison des états des variables d’entrée faitcorrespondre une et une seule combinaison d’état des variables desortie .Exemple :La condition préalable à l’autorisation de fonctionnementd’un ascenseur se traduit par :
• la fermeture de la porte de cabine
•
le non dépassement de la charge limite.
6.2 . La logique séquentielle :Elle prend en compte à la fois les combinaisons des états des
variables d’entrée et la succession chronologique des combinaisonsd’états relatives aux situations antérieures .Exemple : Dans un équipement d’ascenseur, si la cabine estimmobilisée au 3ème étage,- Une action sur le bouton poussoir d’appel du 3ème étage est sans
effet.- Une action sur le bouton poussoir du 5ème étage se traduit parune montée
- Une action sur le bouton poussoir du 1er étage provoque ladescente.
L’état immédiatement antérieur à toute action a été pris en comptedans la logique de commande.6.3 Logique câblée : Les différentes composantes de l’automatisme sont interconnectées
par un câblage représentatif du fonctionnement.6.4 Logique programmée :
KEBE 8
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 9/40
Le fonctionnement d’un équipement initialement représenté par :* un schéma électrique à contacts, un logigramme ou undiagramme fonctionnel, est traduit en équations booléennes et enun programme qui peut être traité par un ordinateur ou un
automate programmable.
Appareillage utilisé dan les installations de forcemotrice
L'utilisation de l'énergie électrique a fait d'énormes progrès depuis
le milieu du XIX ème siècle. Aujourd'hui, grâce à la souplesse desméthodes de transport et d'utilisation, cette source d'énergiedemeure une richesse inégalée. Il n'est donc pas surprenant queses techniques de production, de transport et d'utilisation soientencore en plein essor. Ainsi, la création de nouveaux matériaux etles progrès de la technologie ont permis de réduire la grosseur et lecoût des appareils électriques si bien que les machines modernespèsent cinq fois moins que celles construites il y a soixante ans àpeine.
Chaque fois que nous aurons à traiter un problèmeélectrotechnique nous serons amenés à regarder la fonction del'appareillage étudié :
• Distribuer ,protéger, isoler, commander, convertir, etc…
Ceci nous permettra de placer dans la chaîne de production,transport ou conversion de l'énergie électrique, notreappareillage de base. Ces constituants seront présents dans :
• la distribution industrielle et domestique,• les départs moteur,• les postes de livraison,• les systèmes automatisés,• etc...
1 - Le sectionneur :
a. Rôle
KEBE 9
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 10/40
Le sectionneur est un appareil de connexion qui permet d'isoler (c'est sa fonction) un circuit pour effectuer des opérations demaintenance, de dépannage ou de modification sur les circuitsélectriques qui se trouvent en aval. Il peut être considéré comme
un appareil de connexion et/ou de raccordement mais jamaiscomme un appareil de protection.
Le pouvoir de coupure et de fermeture, c'est à dire la capacitéqu'a cet appareil à fermer ou à ouvrir un circuit, est nul. Ceci estd'une importance capitale : UN SECTIONNEUR SE MANIPULE
TOUJOURS A VIDE (aucun courant ne le traverse lorsqu'onl'actionne, les circuits en aval doivent être ouverts).
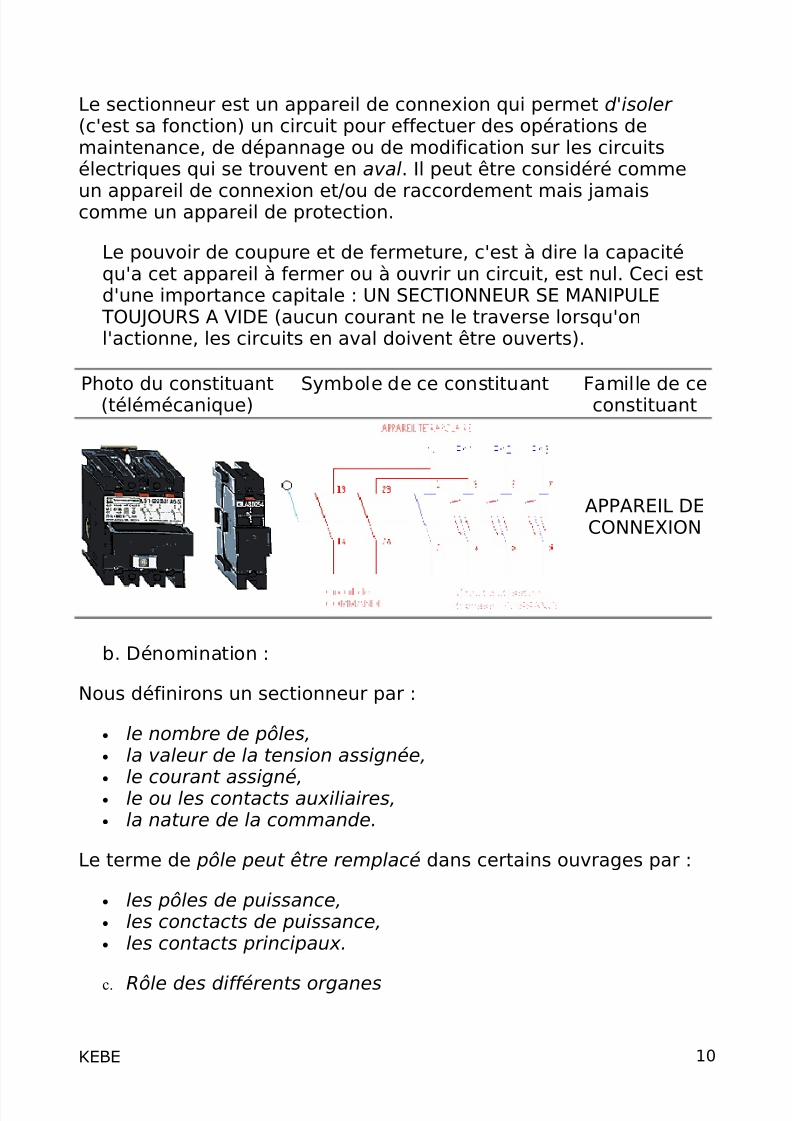
Photo du constituant(télémécanique) Symbole de ce constituant Famille de ceconstituant
APPAREIL DECONNEXION
b. Dénomination :
Nous définirons un sectionneur par :
• le nombre de pôles,• la valeur de la tension assignée,•
le courant assigné,• le ou les contacts auxiliaires,• la nature de la commande.
Le terme de pôle peut être remplacé dans certains ouvrages par :
• les pôles de puissance,• les conctacts de puissance,• les contacts principaux.
c. Rôle des différents organes
KEBE 10
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 11/40
Les contacts principaux permettent d'assurer le sectionnement del'installation et d'isoler la partie en aval. Ils sont câblés dans lapartie puissance de notre installation et repérés sur le symbole del'appareillage par les chiffres 1 à 8. Les contacts auxiliaires
permettent de couper le circuit de commande, ils sont repérés 13-14, 23-24. Certains sectionneurs porte fusibles comme ceux detélémécanique dans la g sont équipés d'un système de pré-coupure de l'installation :
si par hasard un intervenant non habilité actionne lesectionneur alors que celui ci est traversé par un courant, lecontact auxiliaire va couper le circuit de commande ce quiarrêtera la circulation de l'énergie électrique. Lorsque les pôles
de puissance s'ouvriront ils le feront A VIDE. duit dans le seultemps d'action de la poignée de manœuvre. Un sectionneurpeut normalement être condamné en position ouverte oufermée via un système de cadenas. Exemple : je suis chargéde dépanner une installation, je sectionne l'installation,
j'interviens sur celle-ci. Mon associé voyant que l'installationne fonctionne plus et ne sachant pas que je suis en train de ladépanner remet l'installation sous tension........ DANGER..... Ilaurait fallu CADENASSER le sectionneur.
2 - Le contacteur :
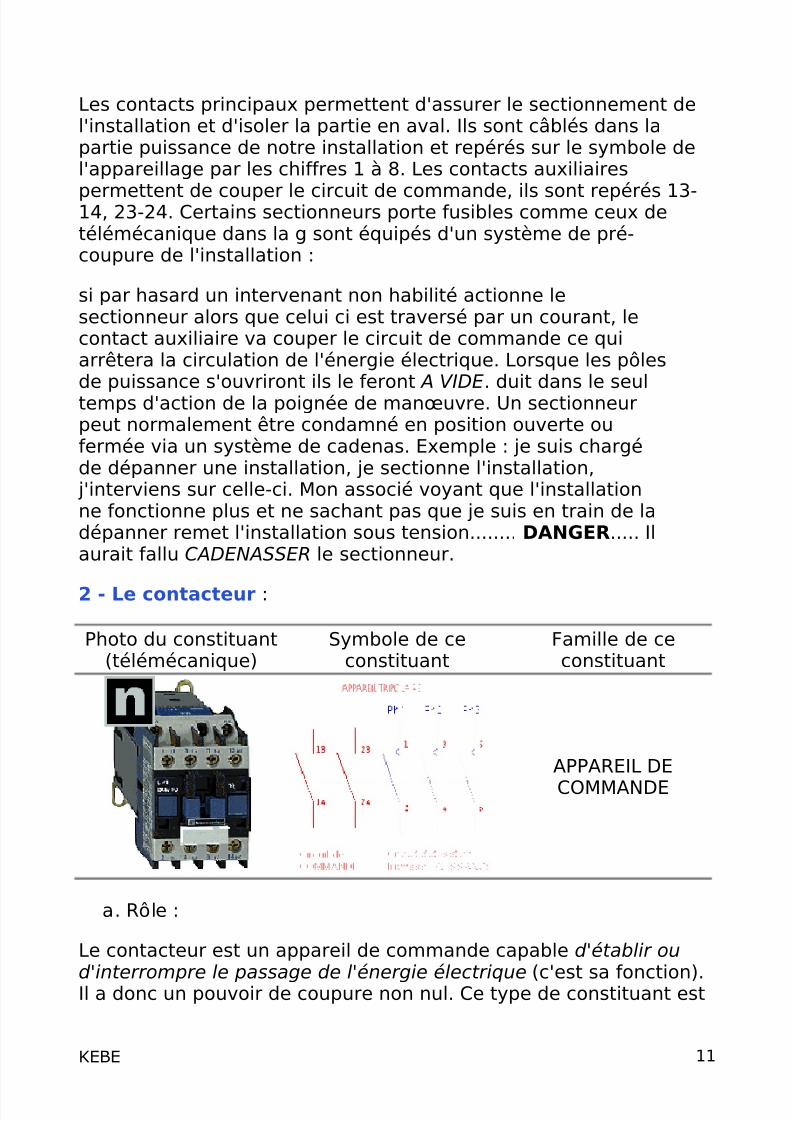
Photo du constituant(télémécanique)
Symbole de ceconstituant
Famille de ceconstituant
APPAREIL DE
COMMANDE
a. Rôle :
Le contacteur est un appareil de commande capable d'établir ou
d'interrompre le passage de l'énergie électrique (c'est sa fonction).Il a donc un pouvoir de coupure non nul. Ce type de constituant est
KEBE 11
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 12/40
aussi appelé pré actionneur puisqu'il se trouve avant l'actionneurdans la chaîne des énergies. Ce dernier peut être commandé àdistance au moyen de contacts actionnés manuellement (boutonpoussoir) ou automatiquement (asservi à une grandeur physique :
pression, température, vitesse, etc.).
Nous venons de dire un peu plus haut que le contacteur était unappareil possédant un pouvoir de coupure..... POURQUOI EN A T-ILBESOIN ?
La séparation de deux contacts sous tension (c'est le cas des pôlesprincipaux d'un contacteur) provoque généralement la formationd'un arc électrique qui doit être rapidement éteint puisque :
le courant électrique continue à circuler tant que l'arcélectrique n'est pas éteint d'où le risque de ne pouvoir arrêter l'installation. L'arc s'accompagne d'un dégagement de chaleur important qui provoque l'usure voire la destruction del'appareil de coupure (réduction de l'endurance électrique,risque de soudure des contacts),
l'arc est dangereux de par sa mobilité. Risque d'amorçageentre phase-terre ou phase-phase et risque d'électrocution des
personnels,
La capacité à "souffler " cet arc électrique (à le supprimer)sera donc donné par le pouvoir de coupure. Un pouvoir decoupure de 10 KA (kilo ampère : 10000 A) permettra decouper un circuit où circule 10000 A max. et desupprimer l'arc électrique qui résulte de l'ouverture de cedernier. Sans pouvoir de coupure, pas de suppression del'arc électrique et donc pas de possibilité d'ouverture du
circuit : la fonction de commande n'est pas réalisée. Lesconstructeurs utilisent plusieurs procédés de suppressionde l'arc. Parmi les plus répandus nous trouverons:
• allongement de l'arc électrique,• utilisation de matériaux anti-arc (cuivre,bronze, zinc),• guidage l'arc sur des contacts autres que lescontacts utilisés dans l'installation,•
soufflage magnétique,
KEBE 12
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 13/40
b. Constitution :
Un contacteur est constitué par :
• des pôles principaux de puissance,• des contacts auxiliaires (possibilité d'additionner au
contacteur un bloc de contacts auxiliaires instantanés outemporisés .
• une armature fixe et une autre mobile,• un ressort de rappel,• un circuit magnétique feuilleté de manière à réduire les pertes
par courant de Foucault ( dues à la présence d'un flux d'induction magnétique alternatif)
• une bobine (insérée dans le circuit de commande). Si la bobineest alimenté en courant alternatif le courant d'appel sur lecircuit de commande lors de la fermeture du contacteur peut atteindre 6 à 10 fois le courant de maintien (utile pour le choix
du transformateur de commande...). Une bobine peut êtrealimentée en courant continu (faire le bon choix lors de lacommande du matériel) ce qui accroît la force d'attraction del'électro-aimant constitué par la bobine et l'armature fixe.
• une "spire de frager" ou "bague de déphasage" qui évite lesvibrations dues à l'alimentation en courant alternatif de labobine du contacteur.
c. Les contacts auxiliaires instantanés et temporisés :
Les principales fonctions des contacts auxiliaires sont :
• réaliser l'auto- alimentation (fonction mémoire),• les verrouillages électriques,• les asservissements,• la logique de commande....
ILS SE TROUVENT DANS LE CIRCUIT DE COMMANDE...Il faut
également savoir que deux types de contact existent. Le contactnormalement ouvert (NO pour "normaly open") et le contact
KEBE 13
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 14/40
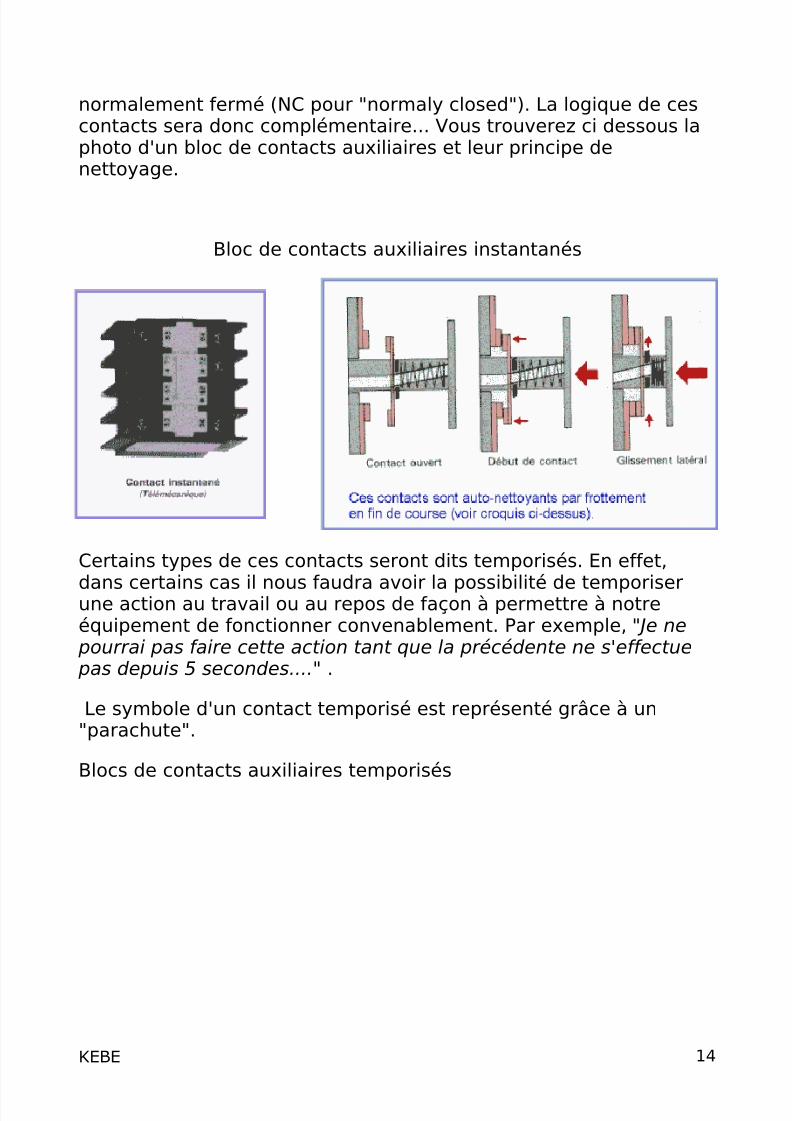
normalement fermé (NC pour "normaly closed"). La logique de cescontacts sera donc complémentaire... Vous trouverez ci dessous laphoto d'un bloc de contacts auxiliaires et leur principe denettoyage.
Bloc de contacts auxiliaires instantanés
Certains types de ces contacts seront dits temporisés. En effet,
dans certains cas il nous faudra avoir la possibilité de temporiserune action au travail ou au repos de façon à permettre à notreéquipement de fonctionner convenablement. Par exemple, "Je ne
pourrai pas faire cette action tant que la précédente ne s'effectue pas depuis 5 secondes...." .
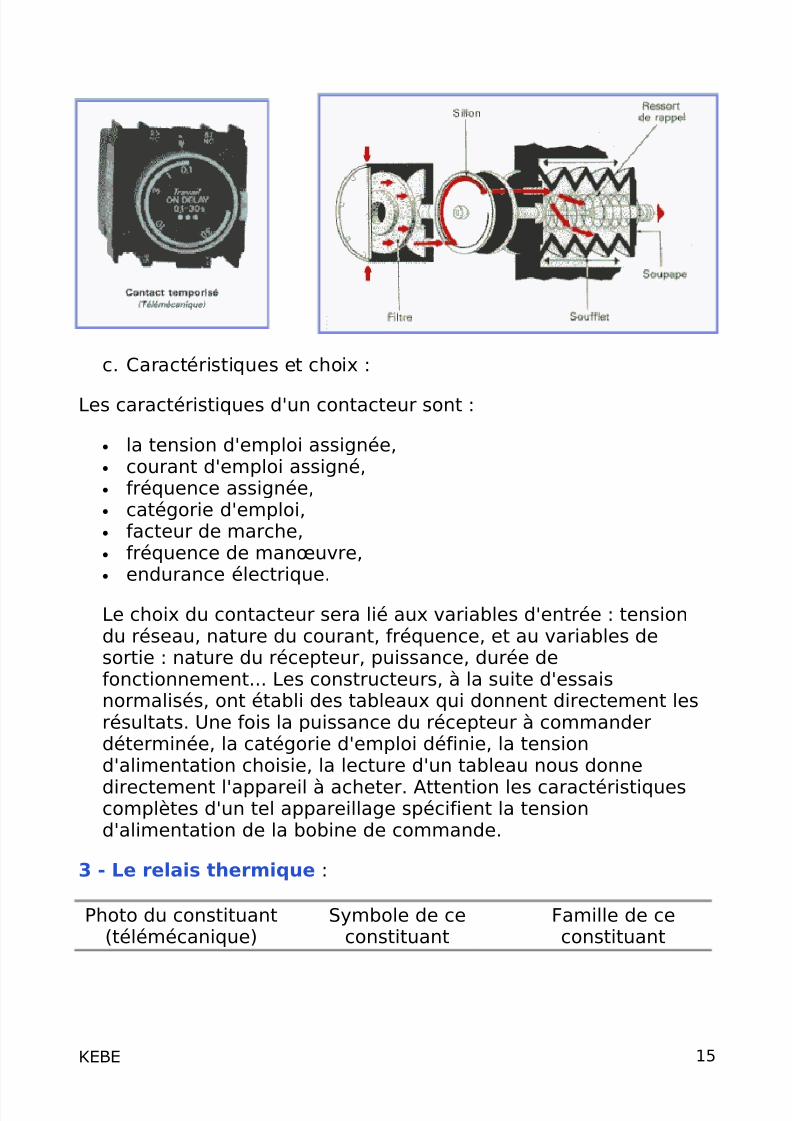
Le symbole d'un contact temporisé est représenté grâce à un"parachute".
Blocs de contacts auxiliaires temporisés
KEBE 14
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 15/40
c. Caractéristiques et choix :
Les caractéristiques d'un contacteur sont :
• la tension d'emploi assignée,• courant d'emploi assigné,• fréquence assignée,• catégorie d'emploi,• facteur de marche,• fréquence de manœuvre,• endurance électrique.
Le choix du contacteur sera lié aux variables d'entrée : tensiondu réseau, nature du courant, fréquence, et au variables desortie : nature du récepteur, puissance, durée defonctionnement... Les constructeurs, à la suite d'essaisnormalisés, ont établi des tableaux qui donnent directement lesrésultats. Une fois la puissance du récepteur à commanderdéterminée, la catégorie d'emploi définie, la tensiond'alimentation choisie, la lecture d'un tableau nous donne
directement l'appareil à acheter. Attention les caractéristiquescomplètes d'un tel appareillage spécifient la tensiond'alimentation de la bobine de commande.
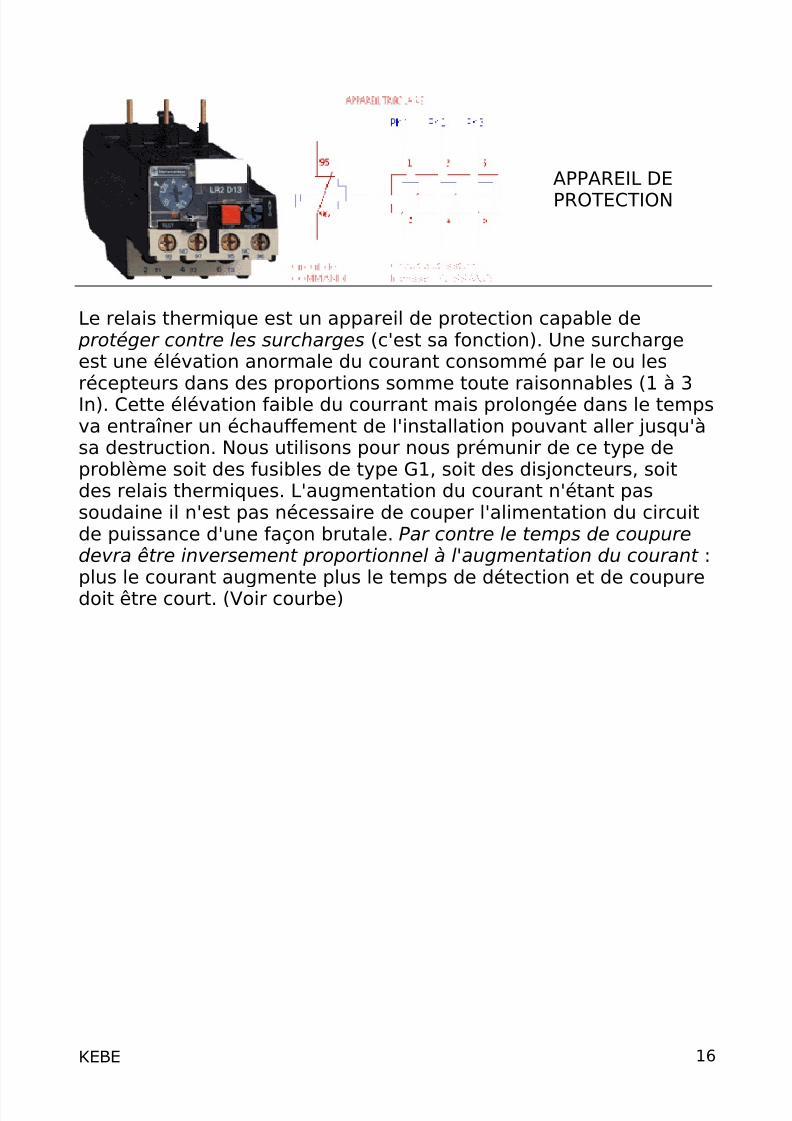
3 - Le relais thermique :
Photo du constituant(télémécanique)
Symbole de ceconstituant
Famille de ceconstituant
KEBE 15
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 16/40
APPAREIL DE
PROTECTION
Le relais thermique est un appareil de protection capable de protéger contre les surcharges (c'est sa fonction). Une surchargeest une élévation anormale du courant consommé par le ou les
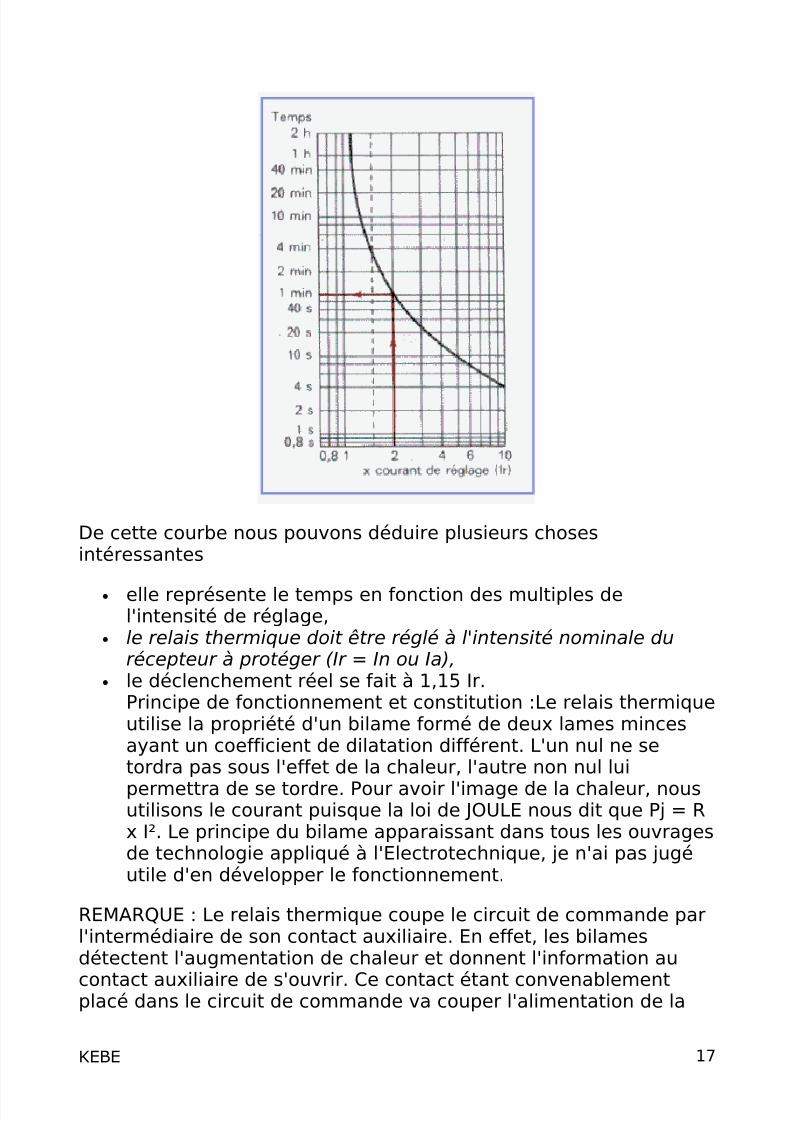
récepteurs dans des proportions somme toute raisonnables (1 à 3In). Cette élévation faible du courrant mais prolongée dans le tempsva entraîner un échauffement de l'installation pouvant aller jusqu'àsa destruction. Nous utilisons pour nous prémunir de ce type deproblème soit des fusibles de type G1, soit des disjoncteurs, soitdes relais thermiques. L'augmentation du courant n'étant passoudaine il n'est pas nécessaire de couper l'alimentation du circuitde puissance d'une façon brutale. Par contre le temps de coupuredevra être inversement proportionnel à l'augmentation du courant :plus le courant augmente plus le temps de détection et de coupuredoit être court. (Voir courbe)
KEBE 16
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 17/40
De cette courbe nous pouvons déduire plusieurs chosesintéressantes
• elle représente le temps en fonction des multiples del'intensité de réglage,
• le relais thermique doit être réglé à l'intensité nominale durécepteur à protéger (Ir = In ou Ia),
• le déclenchement réel se fait à 1,15 Ir.Principe de fonctionnement et constitution :Le relais thermiqueutilise la propriété d'un bilame formé de deux lames mincesayant un coefficient de dilatation différent. L'un nul ne setordra pas sous l'effet de la chaleur, l'autre non nul lui
permettra de se tordre. Pour avoir l'image de la chaleur, nousutilisons le courant puisque la loi de JOULE nous dit que Pj = Rx I². Le principe du bilame apparaissant dans tous les ouvragesde technologie appliqué à l'Electrotechnique, je n'ai pas jugéutile d'en développer le fonctionnement.
REMARQUE : Le relais thermique coupe le circuit de commande parl'intermédiaire de son contact auxiliaire. En effet, les bilamesdétectent l'augmentation de chaleur et donnent l'information au
contact auxiliaire de s'ouvrir. Ce contact étant convenablementplacé dans le circuit de commande va couper l'alimentation de la
KEBE 17
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 18/40
bobine du contacteur qui va ouvrir ses pôles de puissances etinterrompre le passage de l'énergie électrique au travers durécepteur. Ce n'est donc pas le relais thermique qui coupe le circuitde puissance mais bel et bien l'appareillage de commande...
Le moteur asynchrone
1. Principe de fonctionnement:
KEBE 18
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 19/40
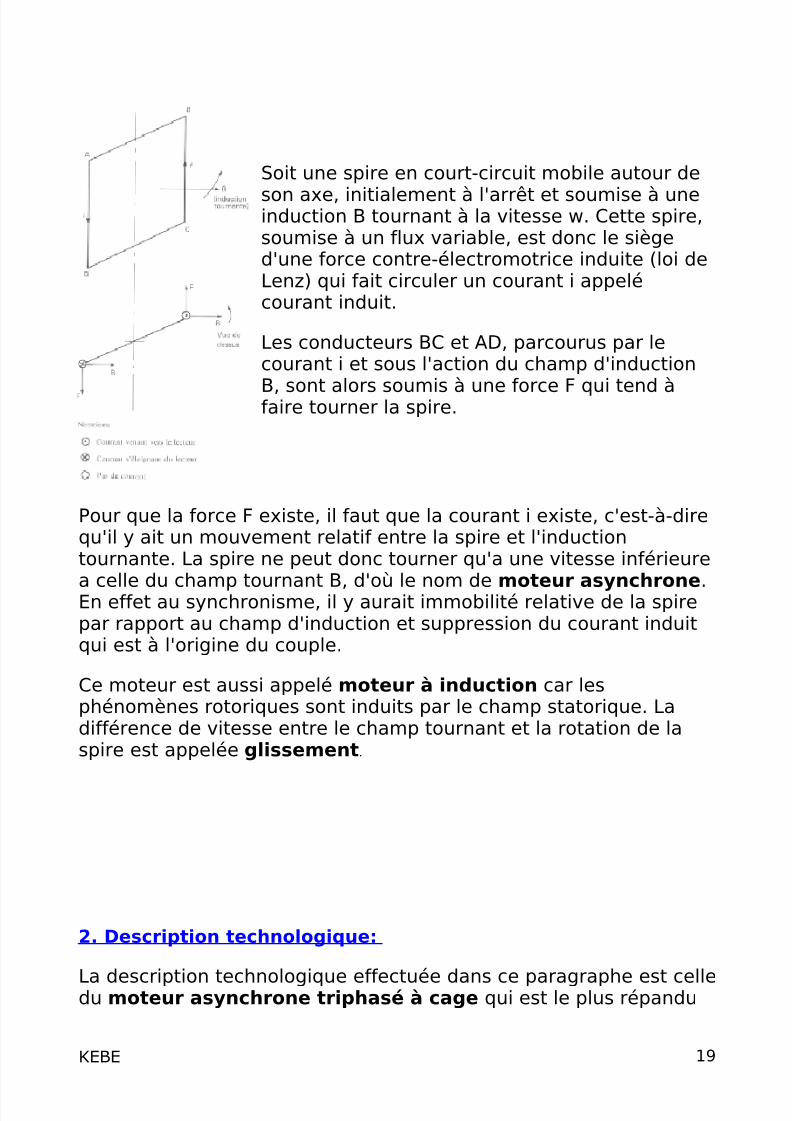
Soit une spire en court-circuit mobile autour de
son axe, initialement à l'arrêt et soumise à uneinduction B tournant à la vitesse w. Cette spire,soumise à un flux variable, est donc le sièged'une force contre-électromotrice induite (loi deLenz) qui fait circuler un courant i appelécourant induit.
Les conducteurs BC et AD, parcourus par lecourant i et sous l'action du champ d'induction
B, sont alors soumis à une force F qui tend àfaire tourner la spire.
Pour que la force F existe, il faut que la courant i existe, c'est-à-direqu'il y ait un mouvement relatif entre la spire et l'inductiontournante. La spire ne peut donc tourner qu'a une vitesse inférieure
a celle du champ tournant B, d'où le nom de moteur asynchrone.En effet au synchronisme, il y aurait immobilité relative de la spirepar rapport au champ d'induction et suppression du courant induitqui est à l'origine du couple.
Ce moteur est aussi appelé moteur à induction car lesphénomènes rotoriques sont induits par le champ statorique. Ladifférence de vitesse entre le champ tournant et la rotation de laspire est appelée glissement.
2. Description technologique:
La description technologique effectuée dans ce paragraphe est celledu moteur asynchrone triphasé à cage qui est le plus répandu
KEBE 19
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 20/40
des moteurs asynchrones. Les particularités technologiques desautres types de moteurs sont décrites dans le chapitre suivant.
Le moteur comporte un inducteur fixe, le stator, et un induit
mobile, le rotor. Aucune liaison électrique n'existe entre le rotor etle stator.
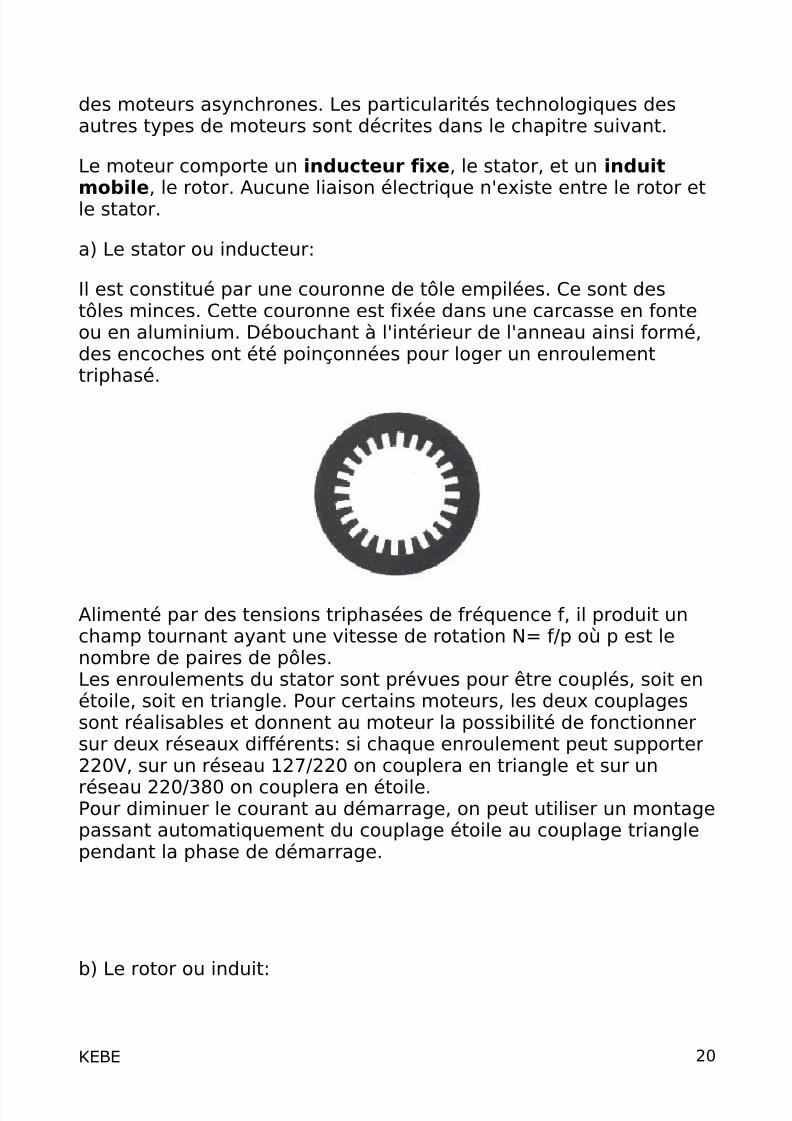
a) Le stator ou inducteur:
Il est constitué par une couronne de tôle empilées. Ce sont destôles minces. Cette couronne est fixée dans une carcasse en fonteou en aluminium. Débouchant à l'intérieur de l'anneau ainsi formé,des encoches ont été poinçonnées pour loger un enroulementtriphasé.
Alimenté par des tensions triphasées de fréquence f, il produit unchamp tournant ayant une vitesse de rotation N= f/p où p est lenombre de paires de pôles.Les enroulements du stator sont prévues pour être couplés, soit enétoile, soit en triangle. Pour certains moteurs, les deux couplagessont réalisables et donnent au moteur la possibilité de fonctionnersur deux réseaux différents: si chaque enroulement peut supporter220V, sur un réseau 127/220 on couplera en triangle et sur un
réseau 220/380 on couplera en étoile.Pour diminuer le courant au démarrage, on peut utiliser un montagepassant automatiquement du couplage étoile au couplage trianglependant la phase de démarrage.
b) Le rotor ou induit:
KEBE 20
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 21/40
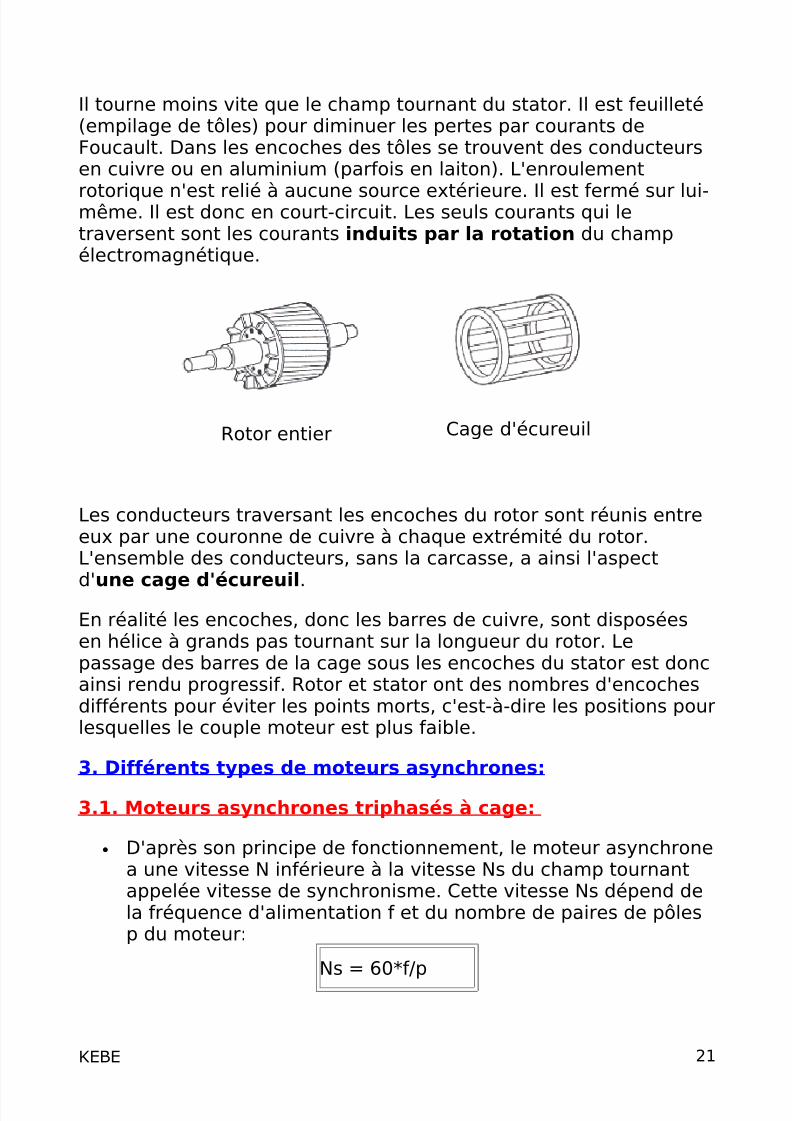
Il tourne moins vite que le champ tournant du stator. Il est feuilleté(empilage de tôles) pour diminuer les pertes par courants deFoucault. Dans les encoches des tôles se trouvent des conducteursen cuivre ou en aluminium (parfois en laiton). L'enroulement
rotorique n'est relié à aucune source extérieure. Il est fermé sur lui-même. Il est donc en court-circuit. Les seuls courants qui letraversent sont les courants induits par la rotation du champélectromagnétique.
Rotor entier Cage d'écureuil
Les conducteurs traversant les encoches du rotor sont réunis entreeux par une couronne de cuivre à chaque extrémité du rotor.L'ensemble des conducteurs, sans la carcasse, a ainsi l'aspect
d'une cage d'écureuil.
En réalité les encoches, donc les barres de cuivre, sont disposéesen hélice à grands pas tournant sur la longueur du rotor. Lepassage des barres de la cage sous les encoches du stator est doncainsi rendu progressif. Rotor et stator ont des nombres d'encochesdifférents pour éviter les points morts, c'est-à-dire les positions pourlesquelles le couple moteur est plus faible.
3. Différents types de moteurs asynchrones:
3.1. Moteurs asynchrones triphasés à cage:
• D'après son principe de fonctionnement, le moteur asynchronea une vitesse N inférieure à la vitesse Ns du champ tournantappelée vitesse de synchronisme. Cette vitesse Ns dépend dela fréquence d'alimentation f et du nombre de paires de pôlesp du moteur:
Ns = 60*f/p
KEBE 21
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 22/40
• avec Ns en tr/min et f en Hz.Exemple: Pour un moteur à 2 pôles (une paire) alimenté parle réseau SENELEC à 50 Hz, Ns = 3000 tr/min.Les moteurs standards ont entre 1 et 6 paires de pôles ce qui
donne des vitesses comprises entre 3000 et 500 trs/min. • La différence entre N et Ns s'appelle le glissement et
s'exprime en % de la vitesse de synchronisme.
g = (Ns-N)/Ns = 1-(N/Ns)
• Le glissement dépend du couple résistant. Il varie entre 0 pourun couple nul et 5 à 6% pour un couple égal au couplenominal.Exemple: Avec un glissement de 5%, la vitesse de rotation durotor est égale à: N= (1-g)*Ns = 2850 tr/min pour un moteur à
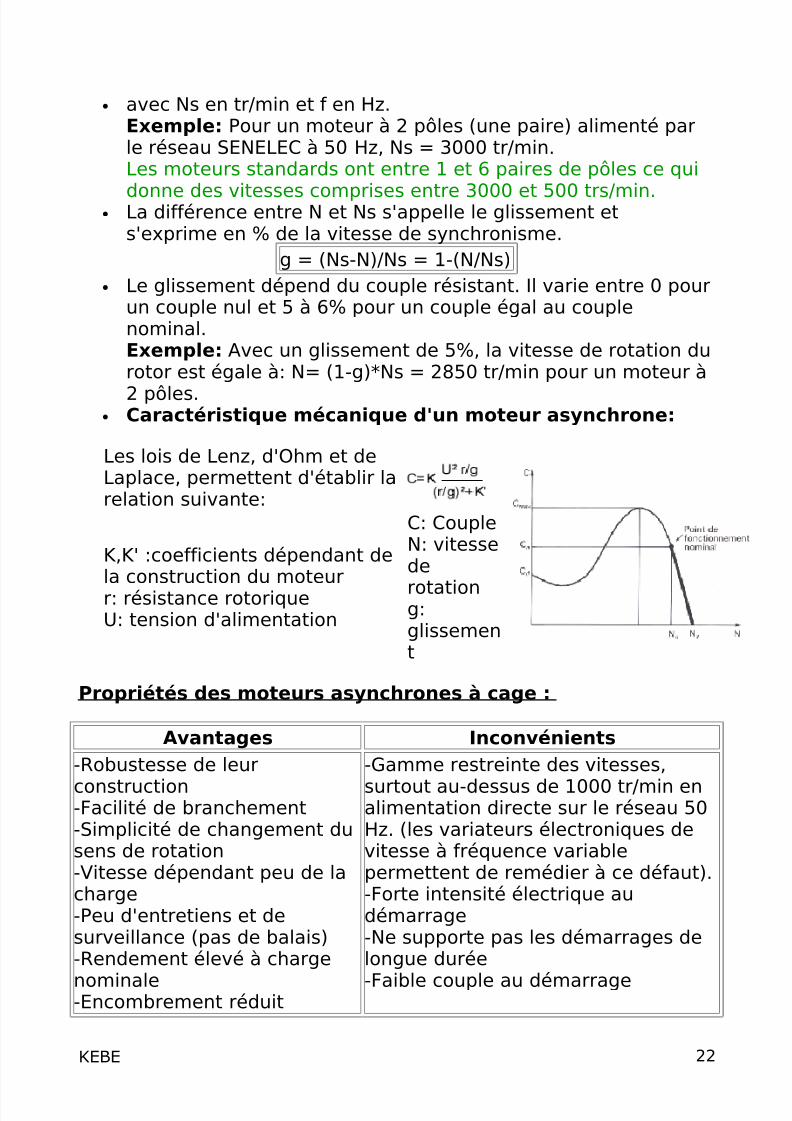
2 pôles.• Caractéristique mécanique d'un moteur asynchrone:
Les lois de Lenz, d'Ohm et deLaplace, permettent d'établir larelation suivante:
K,K' :coefficients dépendant dela construction du moteurr: résistance rotoriqueU: tension d'alimentation
C: CoupleN: vitessede
rotationg:glissement
Propriétés des moteurs asynchrones à cage :
Avantages Inconvénients
-Robustesse de leur
construction-Facilité de branchement-Simplicité de changement dusens de rotation-Vitesse dépendant peu de lacharge-Peu d'entretiens et desurveillance (pas de balais)-Rendement élevé à charge
nominale-Encombrement réduit
-Gamme restreinte des vitesses,
surtout au-dessus de 1000 tr/min enalimentation directe sur le réseau 50Hz. (les variateurs électroniques devitesse à fréquence variablepermettent de remédier à ce défaut).-Forte intensité électrique audémarrage-Ne supporte pas les démarrages delongue durée
-Faible couple au démarrage
KEBE 22
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 23/40
-Simplicité de l'appareillage decommande en cas dedémarrage direct-Prix le plus faible de tous les
moteurs à induction
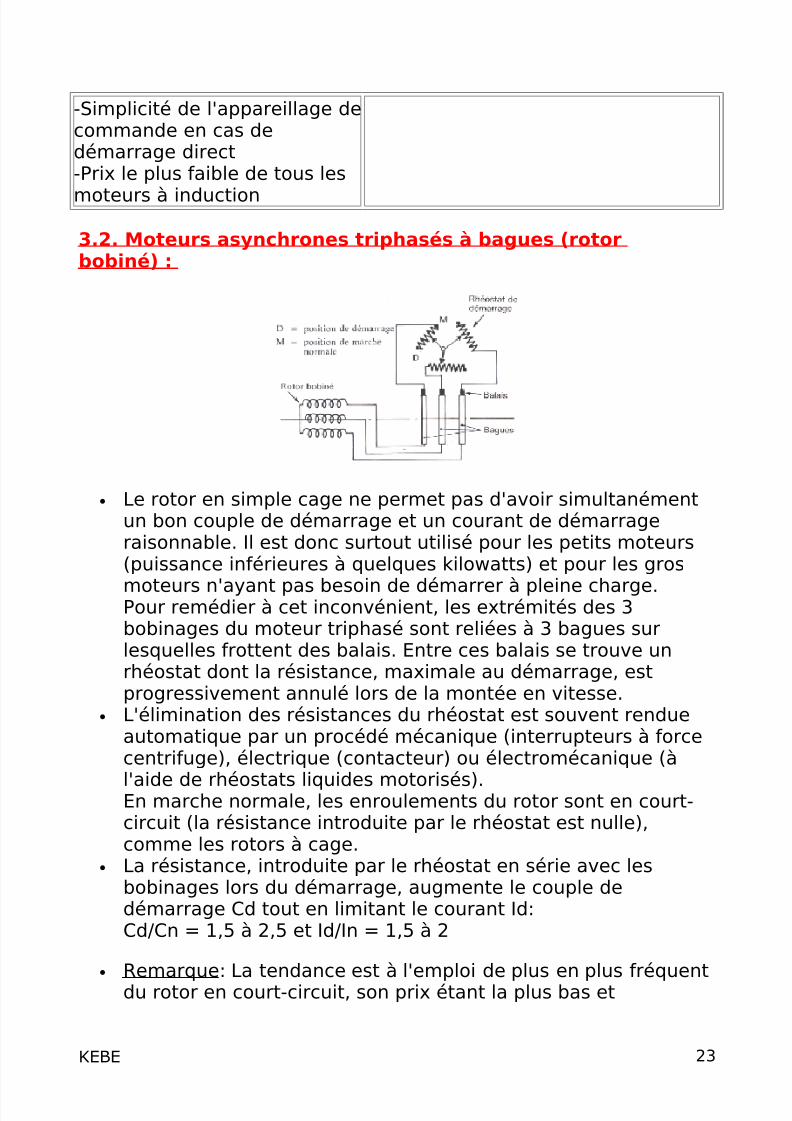
3.2. Moteurs asynchrones triphasés à bagues (rotorbobiné) :
• Le rotor en simple cage ne permet pas d'avoir simultanémentun bon couple de démarrage et un courant de démarrageraisonnable. Il est donc surtout utilisé pour les petits moteurs(puissance inférieures à quelques kilowatts) et pour les gros
moteurs n'ayant pas besoin de démarrer à pleine charge.Pour remédier à cet inconvénient, les extrémités des 3bobinages du moteur triphasé sont reliées à 3 bagues surlesquelles frottent des balais. Entre ces balais se trouve unrhéostat dont la résistance, maximale au démarrage, estprogressivement annulé lors de la montée en vitesse.
• L'élimination des résistances du rhéostat est souvent rendueautomatique par un procédé mécanique (interrupteurs à forcecentrifuge), électrique (contacteur) ou électromécanique (à
l'aide de rhéostats liquides motorisés).En marche normale, les enroulements du rotor sont en court-circuit (la résistance introduite par le rhéostat est nulle),comme les rotors à cage.
• La résistance, introduite par le rhéostat en série avec lesbobinages lors du démarrage, augmente le couple dedémarrage Cd tout en limitant le courant Id:Cd/Cn = 1,5 à 2,5 et Id/In = 1,5 à 2
•
Remarque : La tendance est à l'emploi de plus en plus fréquentdu rotor en court-circuit, son prix étant la plus bas et
KEBE 23
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 24/40
l'augmentation de la puissance des réseaux de distributionpermettant généralement de supporter les appels de courantde démarrage.
Propriétés des moteurs asynchrones à bagues:
Avantages Inconvénients
-Possibilité d'obtenir un couplede décollage adapté à la
machine entraînée-Réduction maximale del'appel de courant pendant ledémarrage-Permet des démarrages delongue durée ou fréquents àl'aide des rhéostats appropriés
-Le rotor bobiné est plus sensible auxcontraintes mécaniques centrifugesque le rotor à cage d'écureuil-Risques de court-circuit augmentéspar la présence de poussières
graphito- métalliques des balais.-Nécessité d'entretien et desurveillance des bagues et des balais(rodage obligatoire)-Nécessité d'un rhéostat dedémarrage-Encombrement plus grand que lemoteur à rotor en court-circuit-Prix plus élevés que les moteurs à
cage
3.3. Moteurs asynchrones monophasés :
Les moteurs sont réalisés avec un seul enroulement au stator,alimenté par une tension monophasée. En effet, pour des trèsfaibles puissances il peut être intéressant, plus simple et moinscoûteux d'utiliser le réseau de distribution SENELEC monophasé.
Principe de fonctionnementLe courant alternatif monophasé produit dans le stator du moteurun champ unidirectionnel d'amplitude sinusoïdale qui ne peutproduire de courant induit dans le rotor et ne peut donc produire decouple moteur.Cependant quand le rotor tourne, il produit un flux à angle droitdans l'espace et dans le temps avec le flux principal produit dans lestator, ce qui donne un champ comparable à celui d'un stator à 2phases.Ceci peut s'expliquer en assimilant le champ à 2 champs tournanten sens contraire, produisant donc 2 couples Ca et Cr. Le champ quitourne dans le même sens que le moteur produit un couple
KEBE 24
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 25/40
important, l'autre qui tourne en sens inverse un couple faible.A l'arrêt: Ca + Cr = 0 mais lorsque le rotor tourne Ca + Cr estdifférent de 0.Pour assurer le démarrage de ce moteur, plusieurs techniques sont
utilisées pour transformer lors du démarrage le moteur monophaséen moteur diphasé:
• Bague de déphasage• Enroulement auxiliaire de démarrage• Moteur à condensateur
Les caractéristiques de ce moteur, comparées à celle des moteurstriphasés sont les suivantes:-puissance massique plus faible-facteur de puissance plus faible-rendement inférieur-ne démarre pas seulLes performances du moteur monophasé sont nettement moinsbonnes que celles des moteurs triphasés. Ils sont essentiellementutilisés pour les faibles puissances (<10kW)
3.4. Moteur universel :
Le principe de fonctionnement est le même que celui d'un moteur àcourant continu série. C'est donc un moteur à collecteur comportantun enroulement inducteur en série avec l'enroulement induit. Lesforces électromagnétiques qui créent le couple moteur sontindépendantes du sens du courant et de sa nature (continu oualternatif), puisque le changement a lieu simultanément dansl'induit et l'inducteur.
Les performances de ce moteur sont faibles. Il est utilisé pour des
applications de très faible puissance (électroménager).
DEMARRAGE DIRECT
KEBE 25
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 26/40
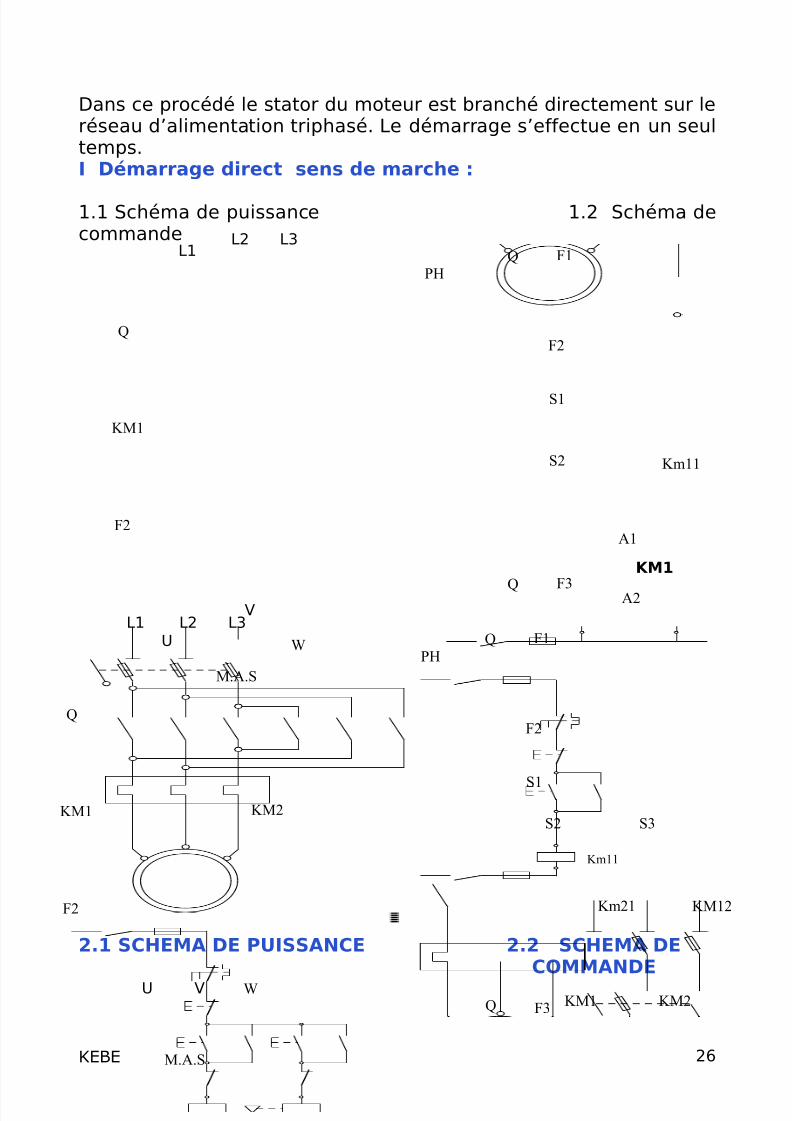
Dans ce procédé le stator du moteur est branché directement sur leréseau d’alimentation triphasé. Le démarrage s’effectue en un seultemps.I Démarrage direct sens de marche :
1.1 Schéma de puissance 1.2 Schéma decommande
2.1 SCHEMA DE PUISSANCE 2.2 SCHEMA DECOMMANDE
KEBE 26
Km21
Km11
S1
KM1
F2
Q
PH
Q
KM1
F2
M.A.S
L1 L2 L3
U V W
F1
Q F3
S2KM2
S3
KM2
Km21 KM12
Q
KM1
F2
M.A.S
L1
L2 L3
U
V
W
Km11
S1
KM1
F2
Q
PH
F1
Q F3
S2
A1
A2
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 27/40
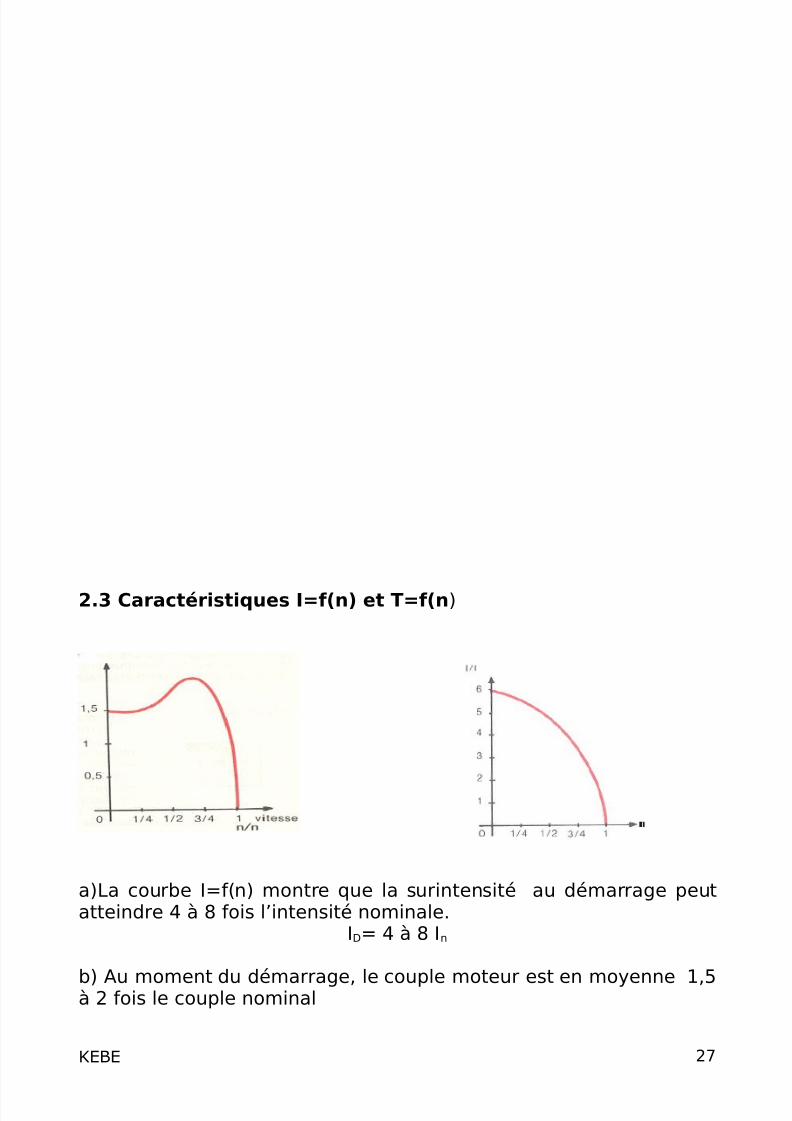
2.3 Caractéristiques I=f(n) et T=f(n)
a)La courbe I=f(n) montre que la surintensité au démarrage peutatteindre 4 à 8 fois l’intensité nominale.
ID= 4 à 8 In
b) Au moment du démarrage, le couple moteur est en moyenne 1,5à 2 fois le couple nominal
KEBE 27
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 28/40
TD=1,5 à 2 Tn
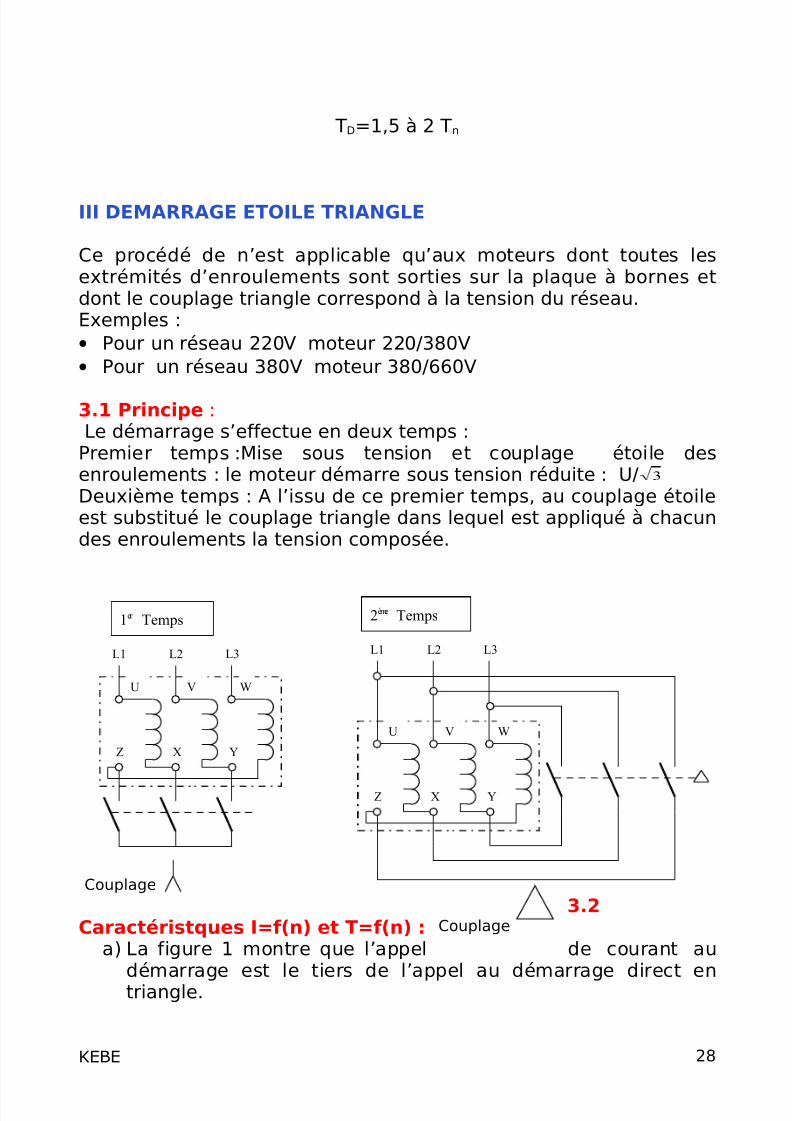
III DEMARRAGE ETOILE TRIANGLE
Ce procédé de n’est applicable qu’aux moteurs dont toutes lesextrémités d’enroulements sont sorties sur la plaque à bornes etdont le couplage triangle correspond à la tension du réseau.Exemples :
• Pour un réseau 220V moteur 220/380V
• Pour un réseau 380V moteur 380/660V
3.1 Principe :Le démarrage s’effectue en deux temps :
Premier temps :Mise sous tension et couplage étoile desenroulements : le moteur démarre sous tension réduite : U/ 3
Deuxième temps : A l’issu de ce premier temps, au couplage étoileest substitué le couplage triangle dans lequel est appliqué à chacundes enroulements la tension composée.
3.2Caractéristques I=f(n) et T=f(n) :
a) La figure 1 montre que l’appel de courant au
démarrage est le tiers de l’appel au démarrage direct entriangle.
KEBE 28
Couplage
Z X Y
U V W
L1 L2 L3
1er Temps 2ème Temps
Z X Y
U V W
L1 L2 L3
Couplage
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 29/40
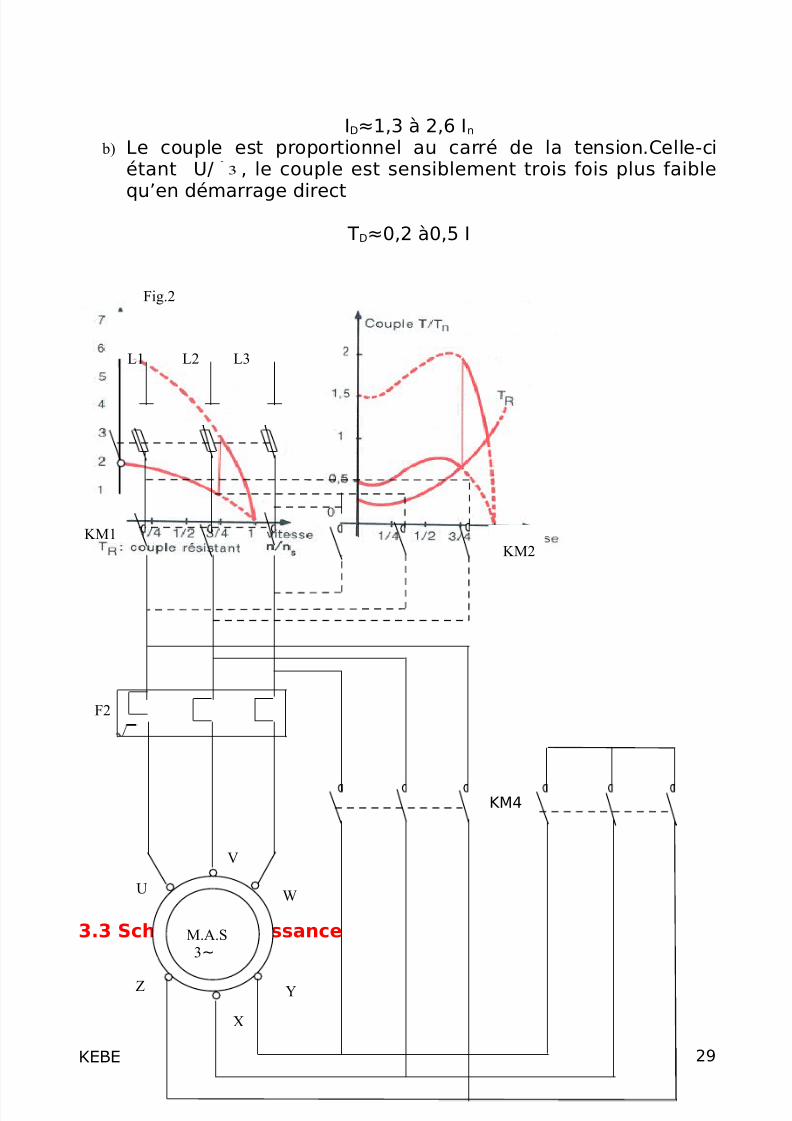
ID≈1,3 à 2,6 In b) Le couple est proportionnel au carré de la tension.Celle-ci
étant U/ 3 , le couple est sensiblement trois fois plus faible
qu’en démarrage direct
TD≈0,2 à0,5 I
3.3 Schéma de puissance
KEBE 29
Fig.2
L1 L2 L3
KM1
F2
U
V
W
M.A.S
3~
Y
KM4
X
KM2
Z
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 30/40
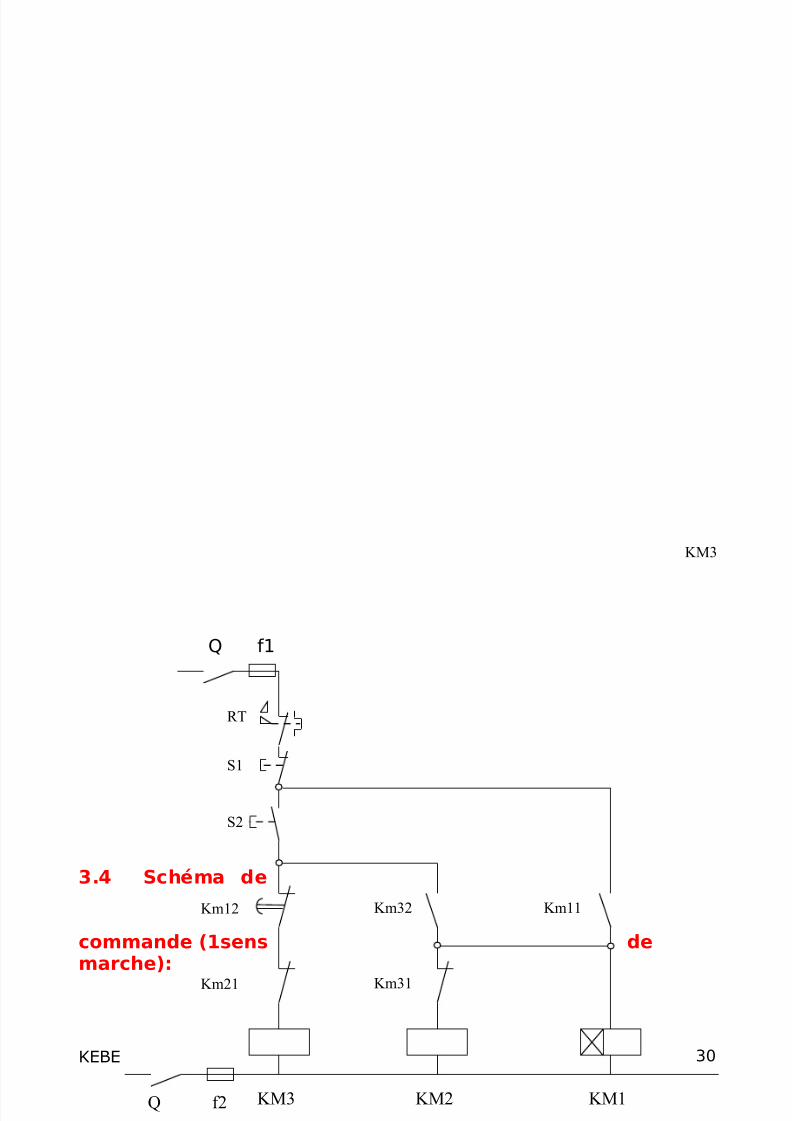
3.4 Schéma de
commande (1sens demarche):
KEBE 30
KM3
Km12 Km32
Q
Q KM2 KM1
Km31Km21
f2
RT
f1
S1
S2
Km11
KM3
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 31/40
Q
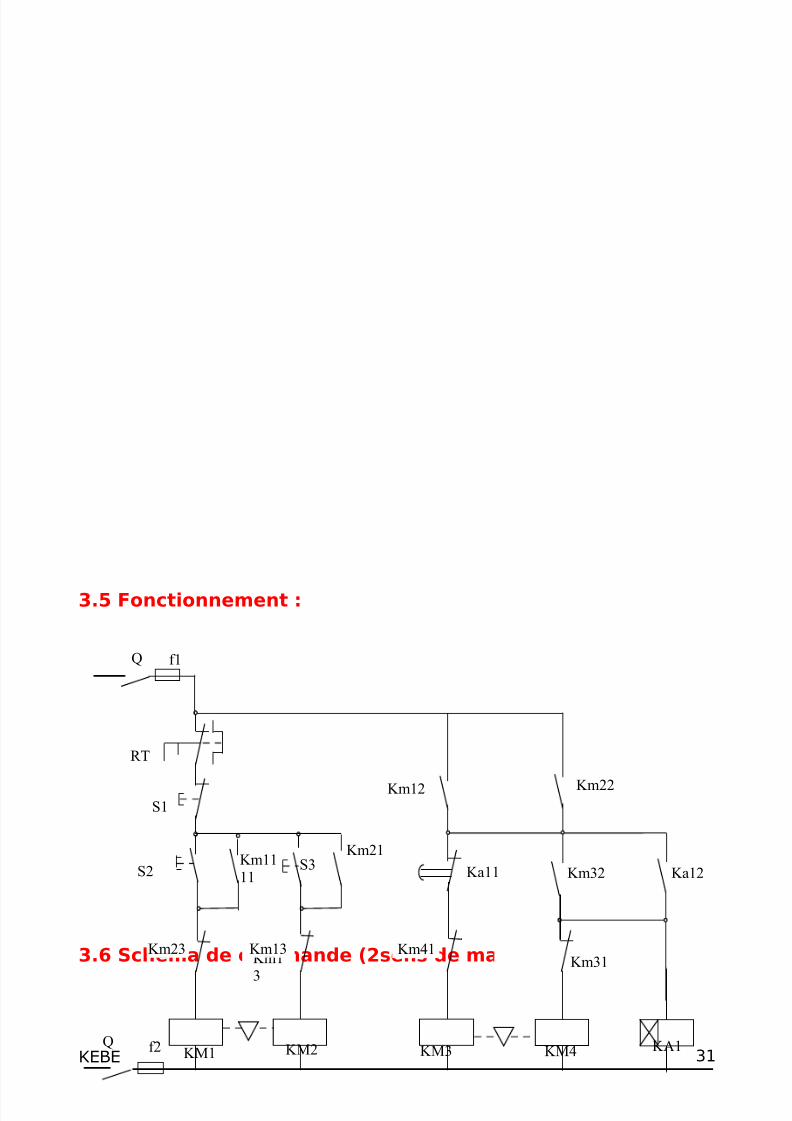
3.5 Fonctionnement :
3.6 Schéma de commande (2sens de marche)
KEBE 31
S2 Ka12
S3Km21
Km12
Ka11
Km41Km23
Km1
3
Q
Km22
Km32
Km31
Q f2 KM2 KM3 KM4 KA1KM1
Km11
11
Km13
S1
RT
f1

5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 32/40
3.7 Fonctionnement :
IV DEMARRAGE PAR AUTO-TRANSFORMATEUR
4.1 Principe :
KEBE 32
2S2 S2 S2S2
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 33/40
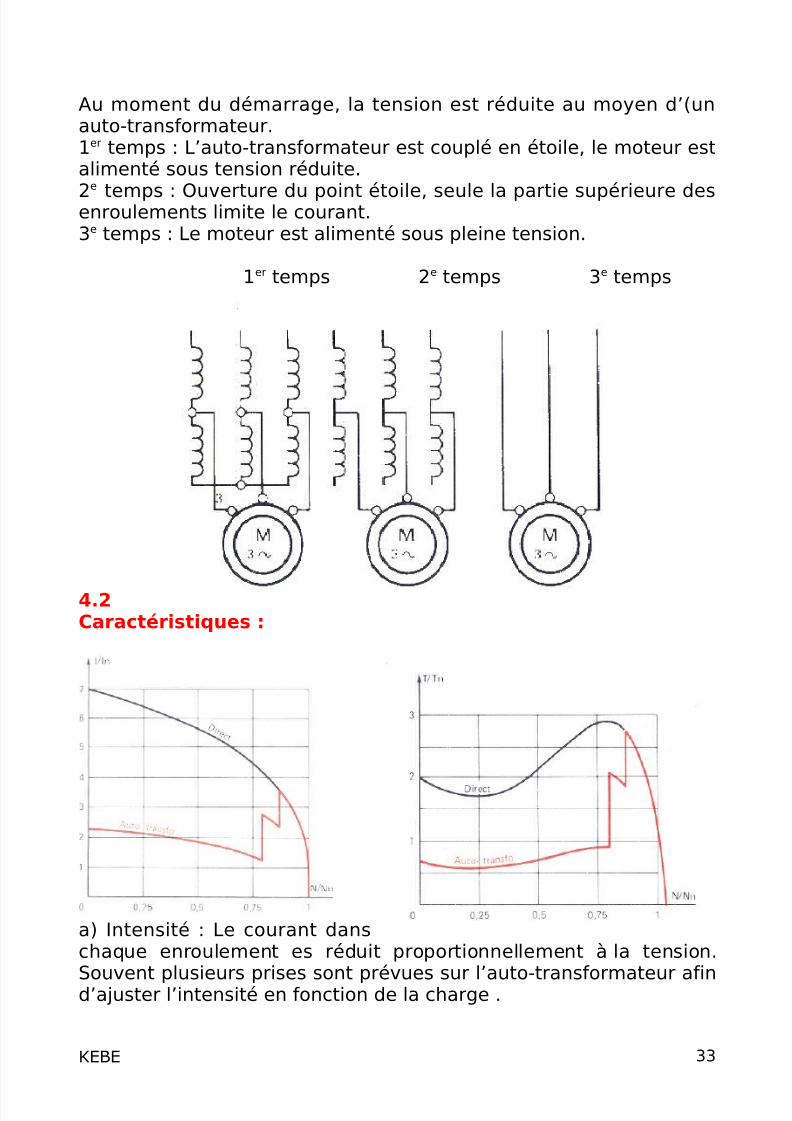
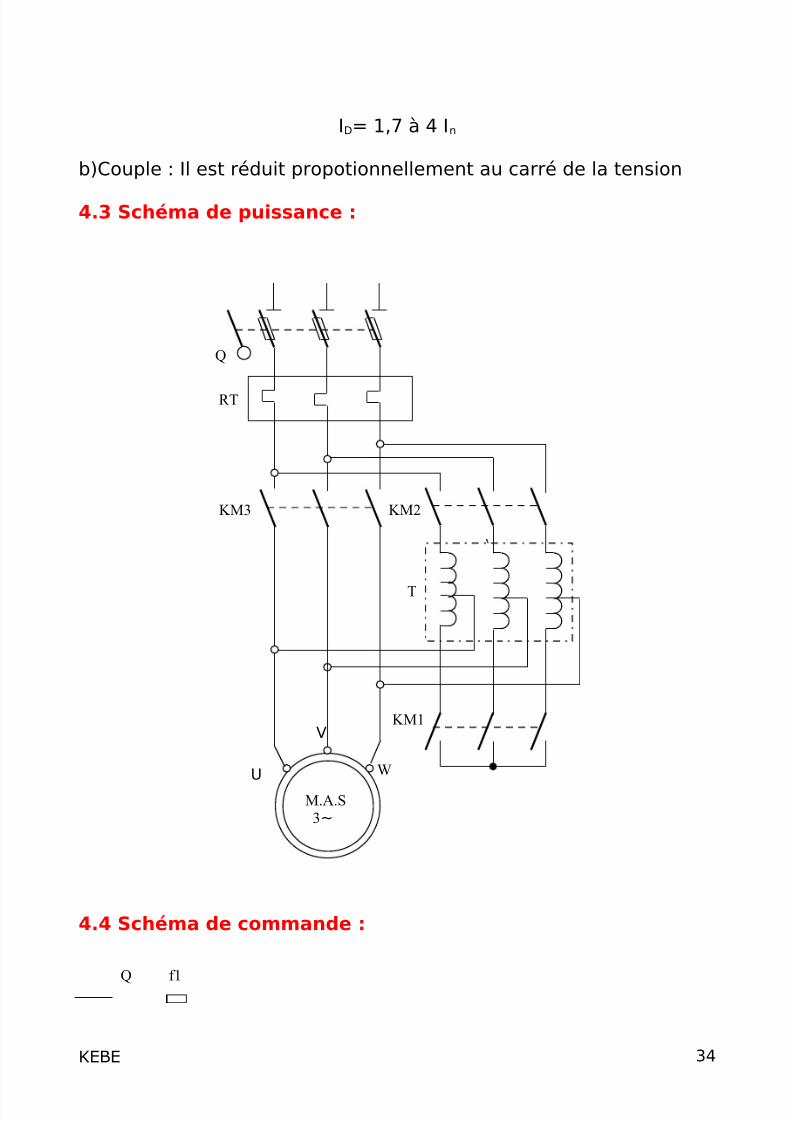
Au moment du démarrage, la tension est réduite au moyen d’(unauto-transformateur.1er temps : L’auto-transformateur est couplé en étoile, le moteur estalimenté sous tension réduite.
2e
temps : Ouverture du point étoile, seule la partie supérieure desenroulements limite le courant.3e temps : Le moteur est alimenté sous pleine tension.
1er temps 2e temps 3e temps
4.2Caractéristiques :
a) Intensité : Le courant danschaque enroulement es réduit proportionnellement à la tension.
Souvent plusieurs prises sont prévues sur l’auto-transformateur afind’ajuster l’intensité en fonction de la charge .
KEBE 33
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 34/40
ID= 1,7 à 4 In
b)Couple : Il est réduit propotionnellement au carré de la tension
4.3 Schéma de puissance :
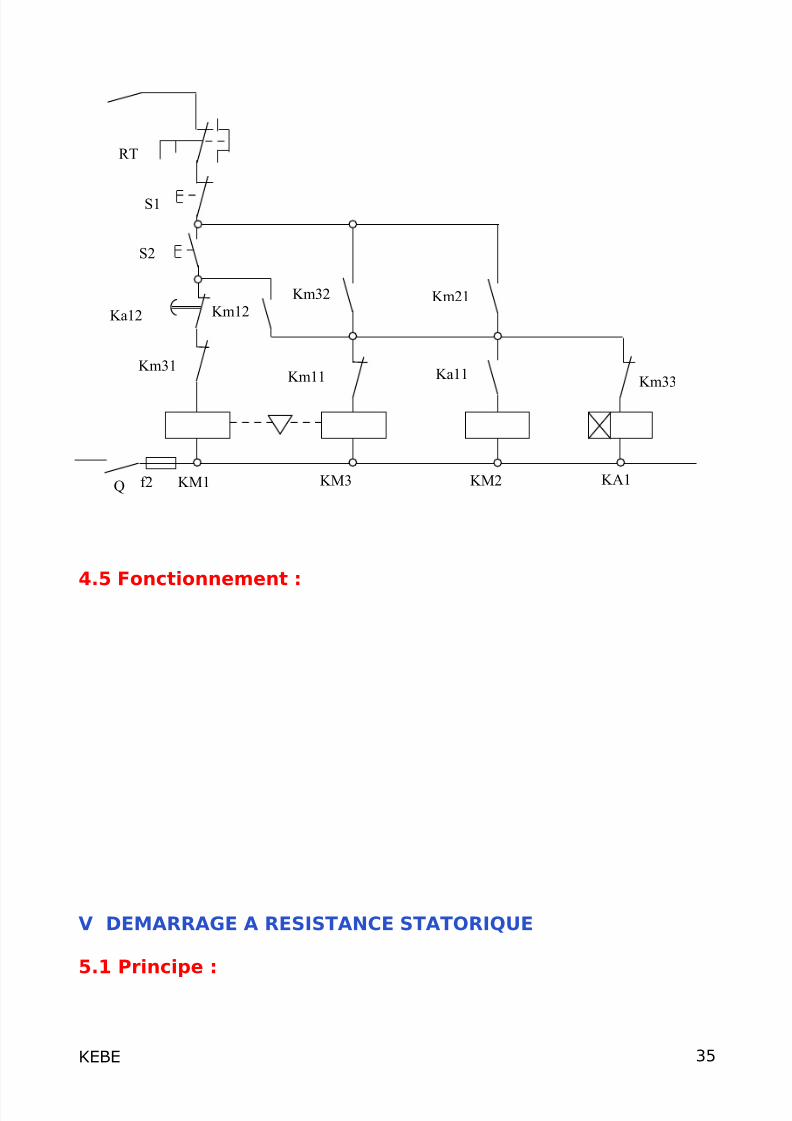
4.4 Schéma de commande :
KEBE 34
Q
U
V
W
KM2
KM1
KM3
T
RT
M.A.S
3~
Q f1
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 35/40
4.5 Fonctionnement :
V DEMARRAGE A RESISTANCE STATORIQUE
5.1 Principe :
KEBE 35
Ka11Km31
Q f2 KM3 KM2 KA1KM1
S2
S1
RT
Ka12 Km12
Km32 Km21
Km11 Km33
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 36/40
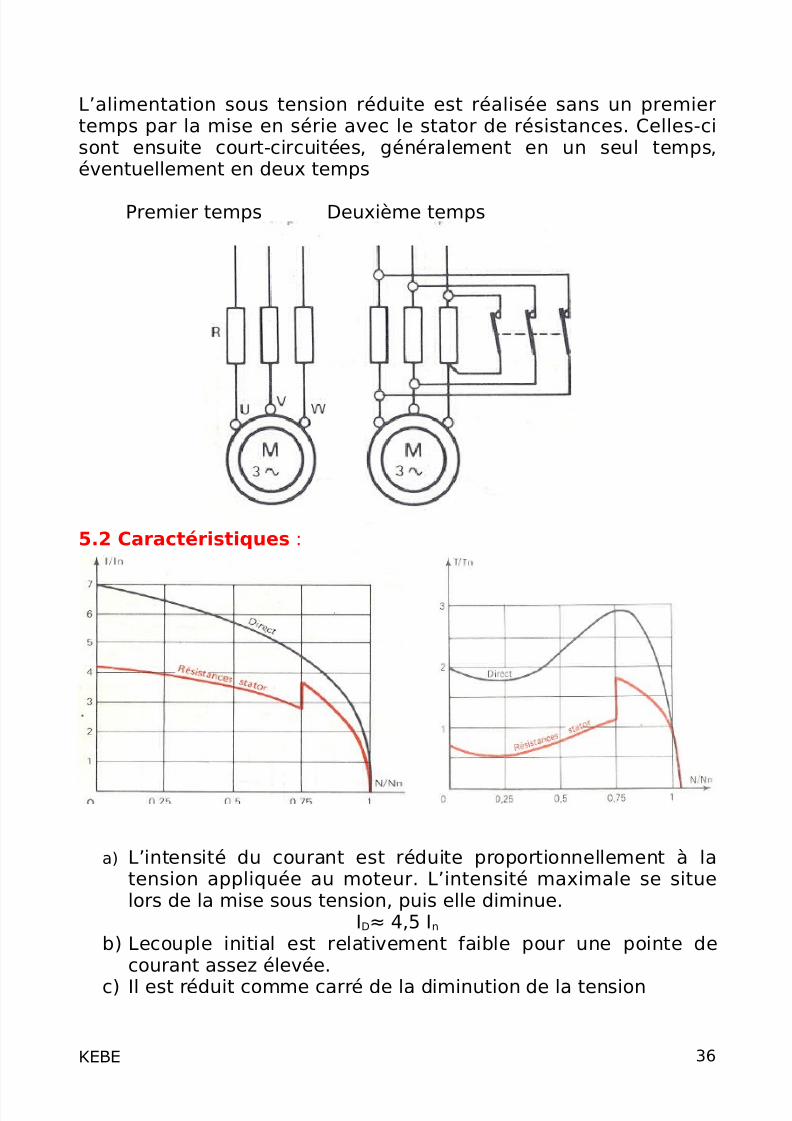
L’alimentation sous tension réduite est réalisée sans un premiertemps par la mise en série avec le stator de résistances. Celles-cisont ensuite court-circuitées, généralement en un seul temps,éventuellement en deux temps
Premier temps Deuxième temps
5.2 Caractéristiques :
a) L’intensité du courant est réduite proportionnellement à latension appliquée au moteur. L’intensité maximale se situelors de la mise sous tension, puis elle diminue.
ID≈ 4,5 Inb) Lecouple initial est relativement faible pour une pointe de
courant assez élevée.c) Il est réduit comme carré de la diminution de la tension
KEBE 36
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 37/40
TD=0,75 Tn
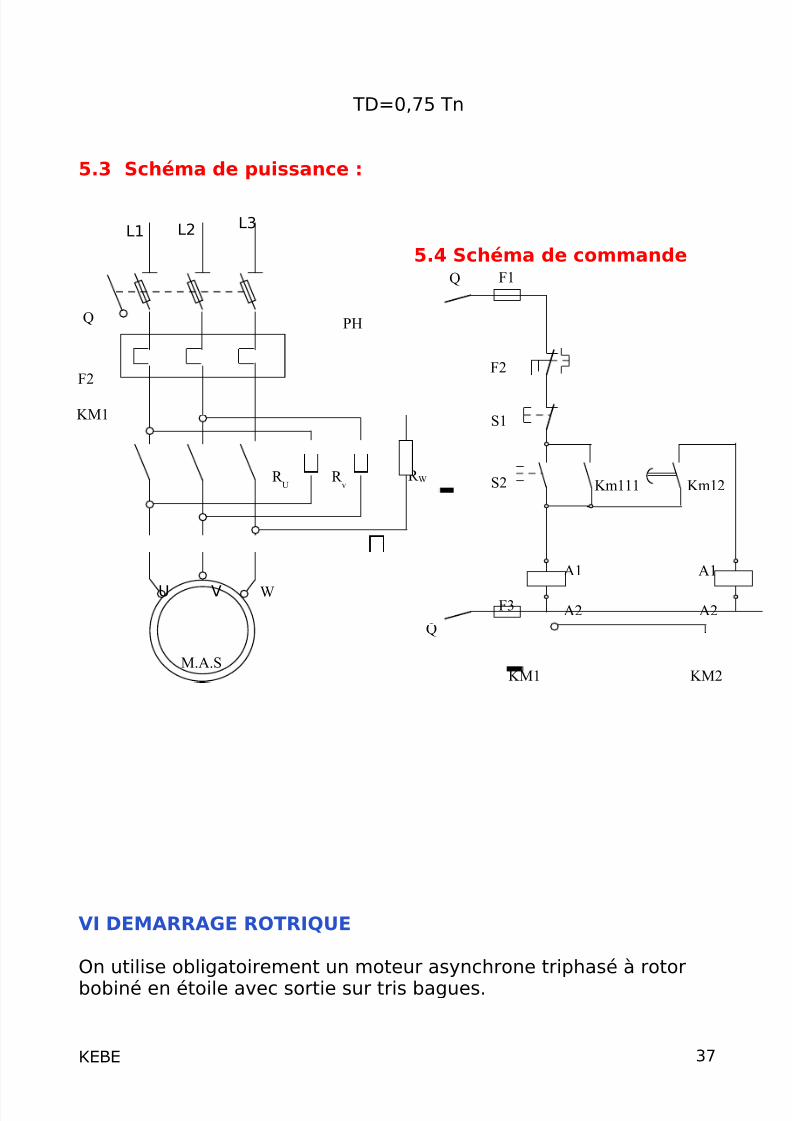
5.3 Schéma de puissance :
5.4 Schéma de commande
VI DEMARRAGE ROTRIQUE
On utilise obligatoirement un moteur asynchrone triphasé à rotorbobiné en étoile avec sortie sur tris bagues.
KEBE 37
R W
KM1
Q
KM2
L1 L2 L3
R v
Q
KM1
M.A.S
F2
U V W
PH
R U
A2
Km111
S1
F2
Q F1
F3
S2
A1
A2
Km12
A1
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 38/40
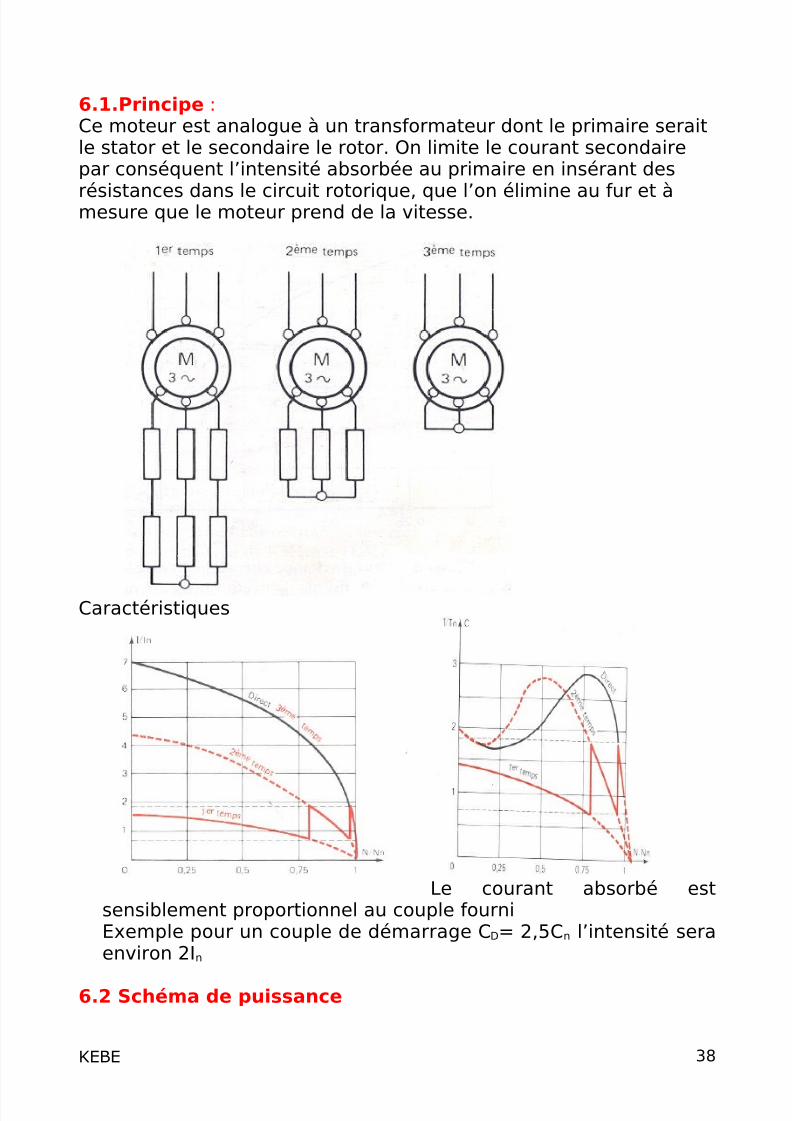
6.1.Principe :Ce moteur est analogue à un transformateur dont le primaire seraitle stator et le secondaire le rotor. On limite le courant secondairepar conséquent l’intensité absorbée au primaire en insérant des
résistances dans le circuit rotorique, que l’on élimine au fur et àmesure que le moteur prend de la vitesse.
Caractéristiques
Le courant absorbé estsensiblement proportionnel au couple fourniExemple pour un couple de démarrage CD= 2,5Cn l’intensité seraenviron 2In
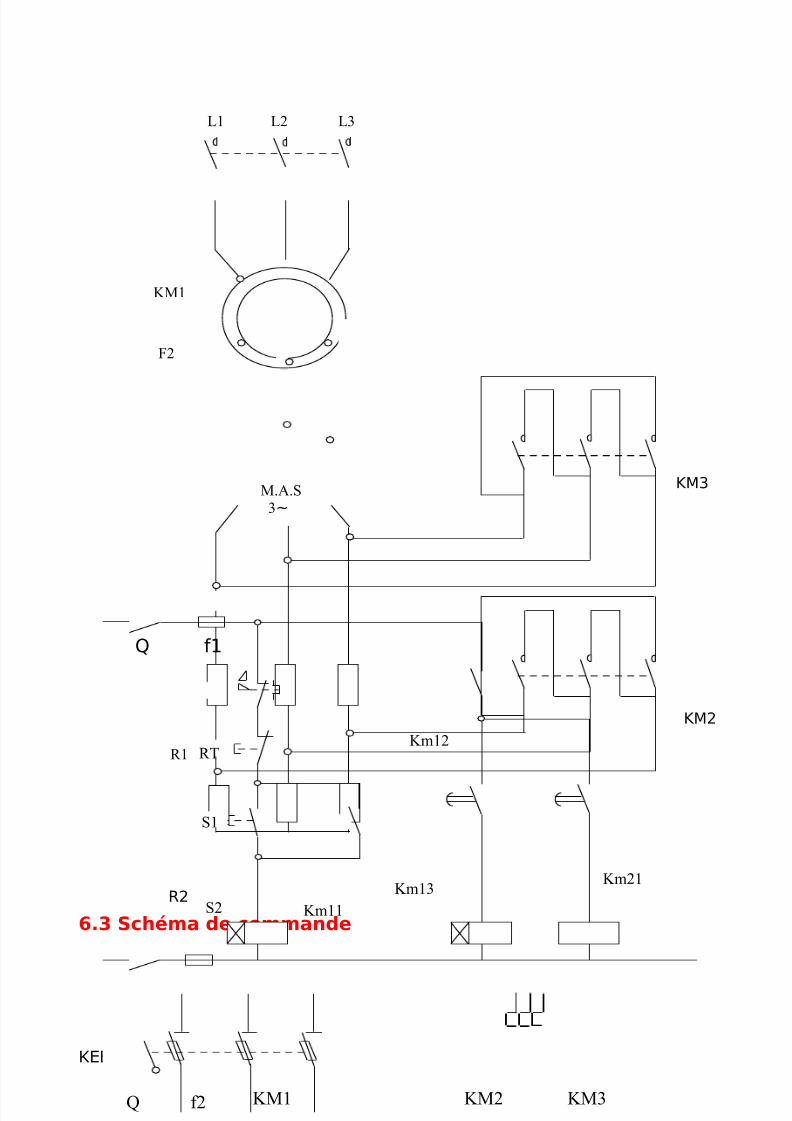
6.2 Schéma de puissance
KEBE 38
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 39/40
6.3 Schéma de commande
KEBE 39
KM2
F2
KM1
M.A.S
3~
R1
R2
L1 L2 L3
KM3
Km13
Km11
Q
Q KM2 KM3
Km12
f2
f1
RT
S1
S2
Km21
KM1
5/11/2018 sysauto - slidepdf.com
http://slidepdf.com/reader/full/sysauto 40/40
Q
6.4 Fonctionnement :
KEBE 40





























