Embed Size (px)
Citation preview
Travaux Pratiques de Mecanique
TP L1-S2 Phys103
Arne KellerElias Khan
Univ. Paris-Sud 11
2009

Table des matieres
I Presentation generale du dispositif pour les TP1 et TP2 6I.1 Banc a coussin d’air . . . . . . . . . . . . . . . . . . . . . . . . . 7I.2 Remarques importantes . . . . . . . . . . . . . . . . . . . . . . . . 8
II TP1 : mouvements de translation rectiligne 9II.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 10II.1 Mouvement rectiligne uniforme . . . . . . . . . . . . . . . . . . . . 10
II.1.1 Experimentation . . . . . . . . . . . . . . . . . . . . . . 10II.2 Mouvement rectiligne uniformement varie . . . . . . . . . . . . . . 11
II.2.1 Principe du dispositif . . . . . . . . . . . . . . . . . . . 11II.2.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 11II.2.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . 12
III TP2 : Chocs a une dimension 13III.1 Configuration du materiel . . . . . . . . . . . . . . . . . . . . . . 14III.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14III.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
IV TP3 : Le pendule simple 17IV.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 18IV.2 Modelisation du pendule . . . . . . . . . . . . . . . . . . . . . . . 18IV.3 Experimentation : pendule simple vertical . . . . . . . . . . . . . . 19IV.4 Experimentation : pendule incline . . . . . . . . . . . . . . . . . . 20
V TP4 : Referentiels en rotation – pseudo forces 21V.1 Pendule de Foucault . . . . . . . . . . . . . . . . . . . . . . . . . 22
V.1.1 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 22V.1.2 Experimentation . . . . . . . . . . . . . . . . . . . . . . 22
V.2 Plateforme en rotation . . . . . . . . . . . . . . . . . . . . . . . . 22V.2.1 Configuration du Materiel . . . . . . . . . . . . . . . . . 23
4 Table des matieres
V.2.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 23V.2.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . 24
VI TP5 : Mesure du moment d’inertie d’un solide 26VI.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 27VI.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27VI.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
A Documents 29A.1 Incertitudes dans les mesures . . . . . . . . . . . . . . . . . . . . . 30A.2 Elements de mecanique . . . . . . . . . . . . . . . . . . . . . . . . 33A.3 Elements theoriques relatifs au TP1 . . . . . . . . . . . . . . . . . 36A.4 Elements theoriques relatifs au TP2 . . . . . . . . . . . . . . . . . 37A.5 Elements theoriques relatifs au TP3 . . . . . . . . . . . . . . . . . 40A.6 Elements theoriques relatifs au TP4 . . . . . . . . . . . . . . . . . 44A.7 Elements theoriques relatifs au TP5 . . . . . . . . . . . . . . . . . 50
5
Ce fascicule presente les cinq seances (Chapitres 2–6) de travaux pratiques (TP) dephysique du second semestre de licence a l’universite Paris–Sud 11. Le premier chapitreest une description generale du dispositif experimental utilise pour les travaux pratiquesTP1 et TP2. Chaque chapitre est en general divise en 3 sections. La premiere est une des-cription du dispositif experimental, la seconde presente une modelisation de l’experienceet la derniere presente l’experimentation que vous devez effectuer. De plus, a chacunedes seances est associee une annexe (Annexes A3–A7) qui introduit les elements theo-riques necessaires a la comprehension du TP et a sa modelisation. L’annexe A1 est uneintroduction aux incertitudes dans les mesures et l’annexe A2 introduit des notions ge-nerales de mecanique qui seront approfondies dans le cours et les travaux diriges (TD).Le chapitre ainsi que les annexes correspondantes doivent imperativement etre etudiesavant la seance de TP.
L’objectif de ces seances est de se retrouver face a une situation concrete en relationdirecte avec des notions abstraites que vous avez etudie (ou allez etudier) en cours eten TD. On s’appliquera particulierement dans la confrontation entre les resultats expe-rimentaux et les predictions du modele. C’est dans cette confrontation que l’estimationet le calcul des incertitudes est crucial.
A la fin de chaque seance de travaux pratiques vous donnerez a votre enseignantun compte rendu de TP qui sera note. Ce compte rendu sera en general compose deselements suivants :• Une breve introduction.• Pour chaque manipulation une description de la facon dont on fait les mesures.• Les resultats bruts des mesures (avant tout traitement). Par exemple : vous mesurez
des temps et des longueurs et non pas directement des vitesses.• L’evaluation des incertitudes sur les mesures.• Les resultats apres traitements (calcul des vitesses ou des energies cinetiques par
exemple). Cette partie pourra comporter des graphiques et des calculs d’incerti-tudes.• Souvent il y aura une comparaison avec un modele theorique.• Une conclusion (vos mesures sont elle en adequation avec le modele theorique ?).
Vous pourrez disposer de vos comptes rendus lors des duex seances d’interrogation deTP a la fin du semestre.
Chapitre I
Presentation generale du dispositifpour les TP1 et TP2
I.1 Banc a coussin d’air . . . . . . . . . . . . . . . . . . . . . . . . . 7I.2 Remarques importantes . . . . . . . . . . . . . . . . . . . . . . . . 8
On presente ici le dispositif experimental qui sera utilise pour les TP1 (MouvementsRectilignes) et le TP2 (Chocs).
Presentation generale du dispositif pour les TP1 et TP2 7
I.1 Banc a coussin d’air
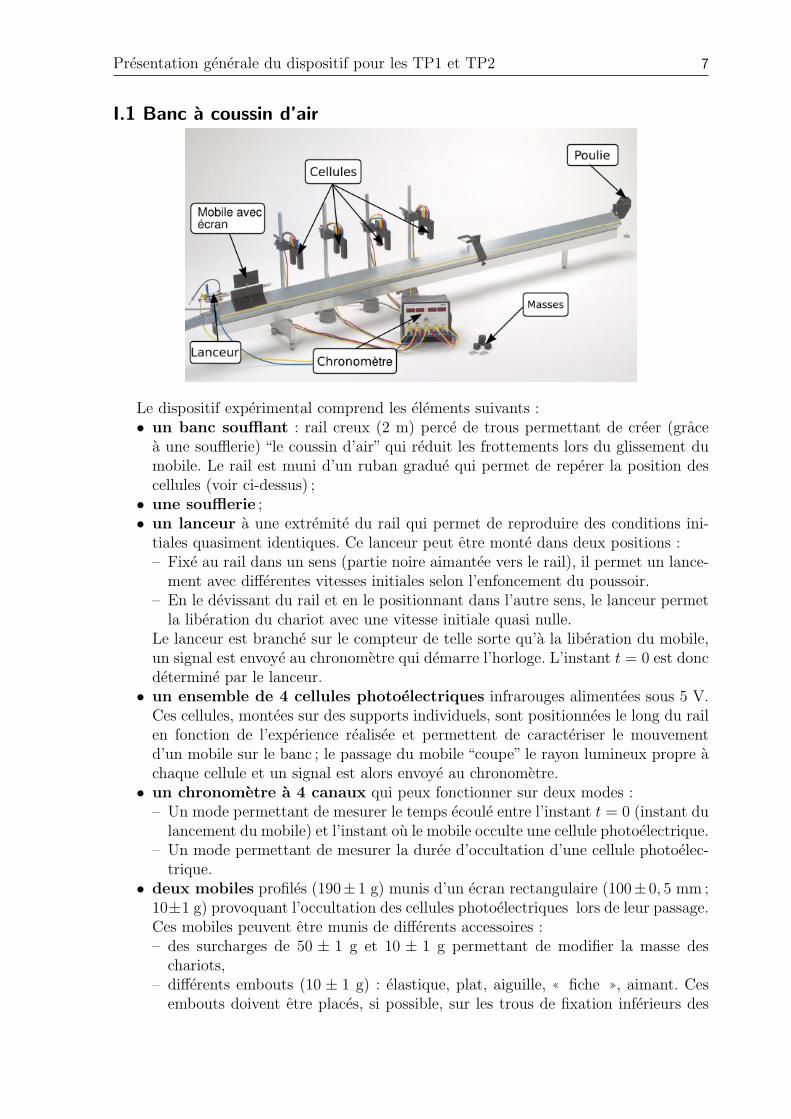
Le dispositif experimental comprend les elements suivants :• un banc soufflant : rail creux (2 m) perce de trous permettant de creer (grace
a une soufflerie) “le coussin d’air” qui reduit les frottements lors du glissement dumobile. Le rail est muni d’un ruban gradue qui permet de reperer la position descellules (voir ci-dessus) ;• une soufflerie ;• un lanceur a une extremite du rail qui permet de reproduire des conditions ini-
tiales quasiment identiques. Ce lanceur peut etre monte dans deux positions :– Fixe au rail dans un sens (partie noire aimantee vers le rail), il permet un lance-
ment avec differentes vitesses initiales selon l’enfoncement du poussoir.– En le devissant du rail et en le positionnant dans l’autre sens, le lanceur permet
la liberation du chariot avec une vitesse initiale quasi nulle.Le lanceur est branche sur le compteur de telle sorte qu’a la liberation du mobile,un signal est envoye au chronometre qui demarre l’horloge. L’instant t = 0 est doncdetermine par le lanceur.• un ensemble de 4 cellules photoelectriques infrarouges alimentees sous 5 V.
Ces cellules, montees sur des supports individuels, sont positionnees le long du railen fonction de l’experience realisee et permettent de caracteriser le mouvementd’un mobile sur le banc ; le passage du mobile “coupe” le rayon lumineux propre achaque cellule et un signal est alors envoye au chronometre.• un chronometre a 4 canaux qui peux fonctionner sur deux modes :
– Un mode permettant de mesurer le temps ecoule entre l’instant t = 0 (instant dulancement du mobile) et l’instant ou le mobile occulte une cellule photoelectrique.
– Un mode permettant de mesurer la duree d’occultation d’une cellule photoelec-trique.
• deux mobiles profiles (190± 1 g) munis d’un ecran rectangulaire (100± 0, 5 mm ;10±1 g) provoquant l’occultation des cellules photoelectriques lors de leur passage.Ces mobiles peuvent etre munis de differents accessoires :– des surcharges de 50 ± 1 g et 10 ± 1 g permettant de modifier la masse des
chariots,– differents embouts (10 ± 1 g) : elastique, plat, aiguille, (( fiche )), aimant. Ces
embouts doivent etre places, si possible, sur les trous de fixation inferieurs des

8 Presentation generale du dispositif pour les TP1 et TP2
mobiles afin de minimiser l’arc-boutement des mobiles en cas de choc.Aussi bien pour les surcharges que pour les embouts, vous penserez a les placer de
facon symetrique, de part et d’autre du chariot pour maintenir son equilibre !• une butee de fin de course permettant de realiser un mouvement aller-retour ;• un systeme de poulie, un plateau (1, 0± 0, 1 g) ;• un ensemble de masses additionnelles (1, 0± 0, 1g) permettant d’entraıner le
mobile ;
I.2 Remarques importantes
Vous utilisez un materiel de precision qui est fragile. Les manipulations sont donca effectuer avec le plus grand soin possible. Toute degradation de materiel entraınerades erreurs inevitables dans vos mesures, ainsi que dans celles de vos camarades quitravailleront ensuite sur cette experience.• Ne jamais faire glisser les mobiles sur le rail sans mettre en route au prealable la
soufflerie avec un debit d’air suffisant pour que le mobile ne frotte pas sur le rail.• Manipuler le mobile (changement d’embout, de surcharges, d’ecran. . .) sur la table
et non sur le banc.• C’est le meme boıtier (le chronometre) qui permet l’alimentation des cellules et
la mesure (fils bleus et rouges pour l’alimentation, fil jaune pour la detection desoccultations et des-occultations). Les cellules ont ete connectees a l’avance, vousn’avez pas a changer les branchements.• Pensez a baisser la soufflerie lorsqu’elle n’est pas utilisee pour une experience.
Chapitre II
TP1 : mouvements de translationrectiligne
II.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 10II.1 Mouvement rectiligne uniforme . . . . . . . . . . . . . . . . . . . . 10
II.1.1 Experimentation . . . . . . . . . . . . . . . . . . . . . . 10II.2 Mouvement rectiligne uniformement varie . . . . . . . . . . . . . . 11
II.2.1 Principe du dispositif . . . . . . . . . . . . . . . . . . . 11II.2.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 11II.2.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . 12
10 TP1 : mouvements de translation rectiligne
II.1 Configuration du Materiel
1. Mise en marche
• Reglez la soufflerie entre 4 et 5. Le debit d’air doit etre suffisant pour que le mobilene frotte pas sur le rail. Il n’est pas utile de mettre la soufflerie au maximum.• Fixez un ecran sur la partie superieure d’un mobile puis placez le mobile sur le
banc.• Positionnez les 4 cellules de detection a intervalles reguliers le long du rail.• Verifiez le libre passage du mobile sous les cellules photoelectriques en veillant a
bien les positionner :– pour ne pas risquer d’entraver le mouvement,– pour que l’ecran occulte bien le faisceau.
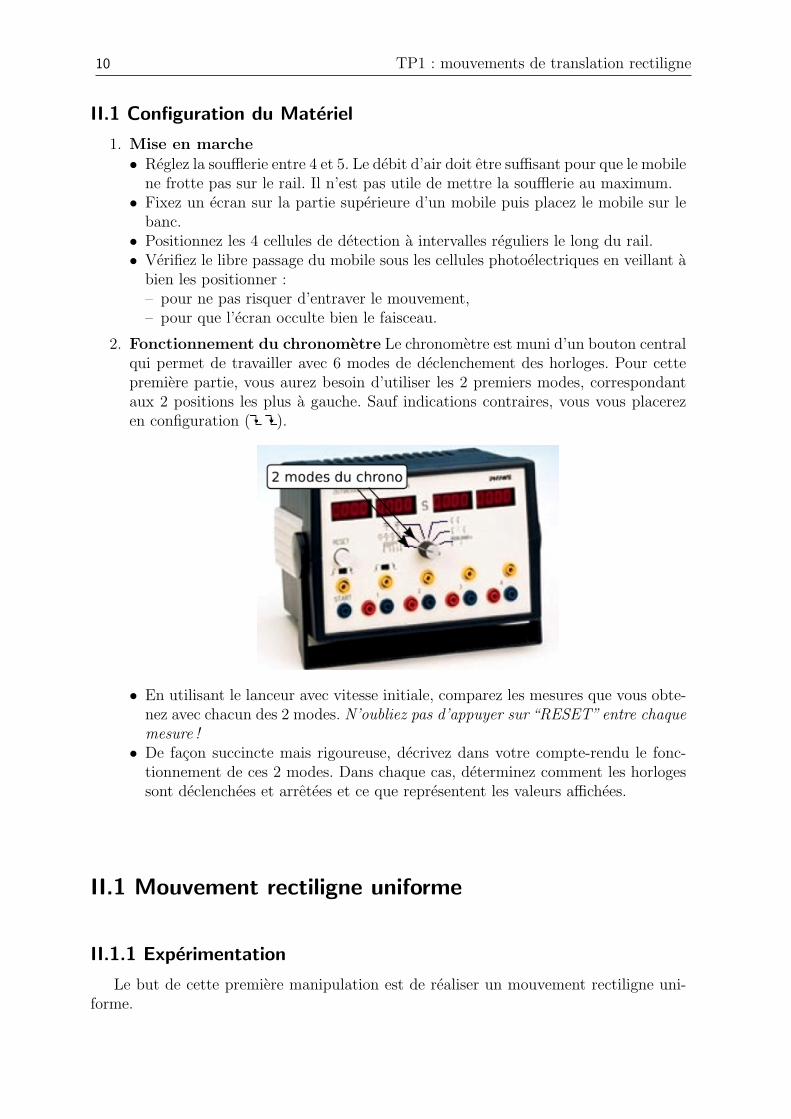
2. Fonctionnement du chronometre Le chronometre est muni d’un bouton centralqui permet de travailler avec 6 modes de declenchement des horloges. Pour cettepremiere partie, vous aurez besoin d’utiliser les 2 premiers modes, correspondantaux 2 positions les plus a gauche. Sauf indications contraires, vous vous placerezen configuration ( ).
• En utilisant le lanceur avec vitesse initiale, comparez les mesures que vous obte-nez avec chacun des 2 modes. N’oubliez pas d’appuyer sur “RESET” entre chaquemesure !• De facon succincte mais rigoureuse, decrivez dans votre compte-rendu le fonc-
tionnement de ces 2 modes. Dans chaque cas, determinez comment les horlogessont declenchees et arretees et ce que representent les valeurs affichees.
II.1 Mouvement rectiligne uniforme
II.1.1 Experimentation
Le but de cette premiere manipulation est de realiser un mouvement rectiligne uni-forme.
II.2 Mouvement rectiligne uniformement varie 11
Avec le materiel dont vous disposez, proposez une methode permettant de realisersimplement un mouvement uniforme et assurez vous que les conditions necessaires sontbien remplies.
1. Sans calcul ni traitement de mesures, verifiez que le mouvement du mobile estuniforme. On choisira pour cela le mode du chronometre le plus approprie.
2. Pour differentes positions du bouton poussoir du lanceur, determinez la valeur dela vitesse du mobile. S’agit-il d’une vitesse moyenne ou instantanee ?
3. Quelles sont les incertitudes de mesures ? En deduire l’incertitude sur les valeursdes vitesses obtenues. Conclure.
4. Determiner l’energie cinetique du mobile ainsi que son incertitude. Est-elle constanteau cours du mouvement ? Que dire de l’energie mecanique du mobile.
5. On utilise maintenant l’autre mode du chronometre. Reprendre les deux questionsprecedentes.
6. Comparer les deux methodes.
II.2 Mouvement rectiligne uniformement varie
Documents :Document A.3.1
II.2.1 Principe du dispositif
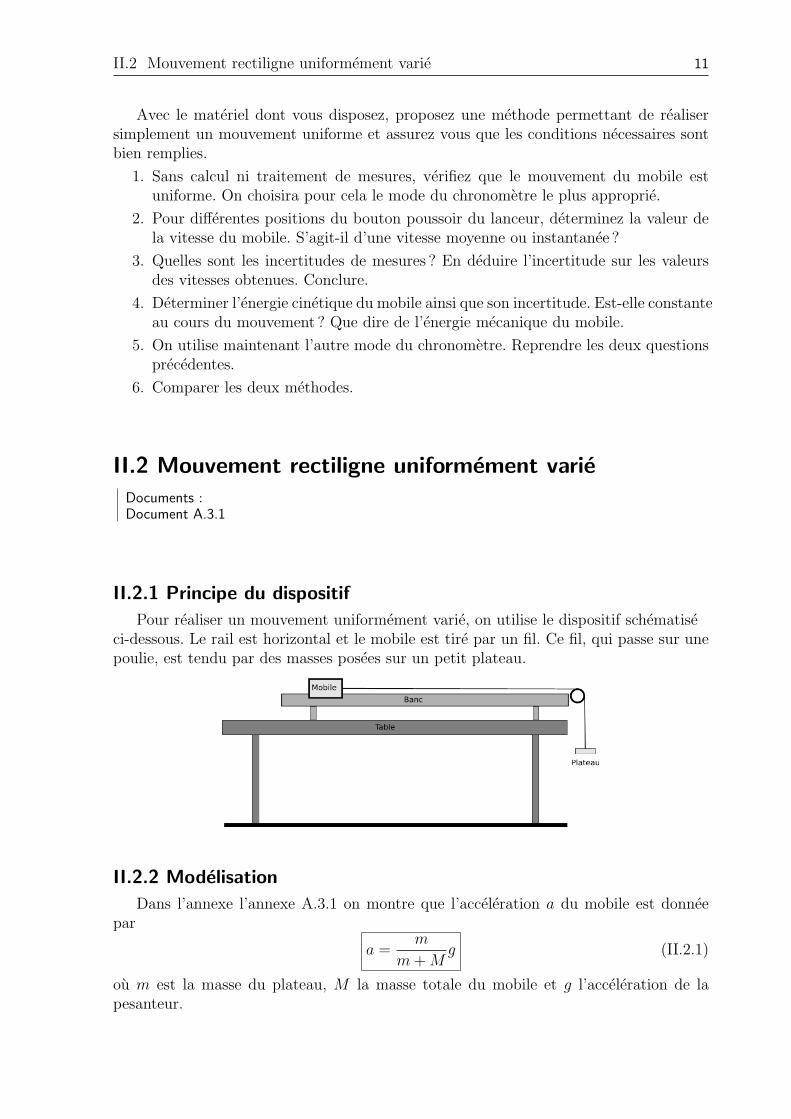
Pour realiser un mouvement uniformement varie, on utilise le dispositif schematiseci-dessous. Le rail est horizontal et le mobile est tire par un fil. Ce fil, qui passe sur unepoulie, est tendu par des masses posees sur un petit plateau.
II.2.2 Modelisation
Dans l’annexe l’annexe A.3.1 on montre que l’acceleration a du mobile est donneepar
a =m
m+Mg (II.2.1)
ou m est la masse du plateau, M la masse totale du mobile et g l’acceleration de lapesanteur.
12 TP1 : mouvements de translation rectiligne
1. Determiner l’expression de la force T qu’exerce le fil sur le mobile.
2. Determiner l’expression du travail W de T quand le mobile parcourt une distanced.
3. Determiner l’expression de la vitesse et de la position du mobile en fonction dutemps t.
II.2.3 Experimentation
1. Proposez une methode pour verifier que le mouvement du mobile est bien unifor-mement accelere.
2. Mettez en œuvre la methode choisie et deduisez-en par une determination gra-phique la valeur de l’acceleration aexp du mobile.
3. Determinez l’incertitude δaexp sur la valeur mesuree aexp.
4. En tenant compte des incertitudes sur les valeurs des masses m et M , determinezl’incertitude δa sur la valeur theorique de l’acceleration a.
5. Etant donnee ces incertitudes, peut-on dire que vos mesures sont conformes a latheorie ?
6. Deduisez de vos mesures la variation d’energie cinetique entre les passages du mo-bile au premier et au dernier capteur. Comparez ce resultat au travail W de Tentre ces deux memes instants. Ce resultat vous parait-il coherent ? Que dire del’energie mecanique du mobile au cours du mouvement ?
Chapitre III
TP2 : Chocs a une dimension
III.1 Configuration du materiel . . . . . . . . . . . . . . . . . . . . . . 14III.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14III.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Dans ce TP, on se propose d’etudier du point de vue dynamique et energetique,differentes situations de collision a une dimension : deux solides se deplacent selon unedirection donnee et entrent en interaction avec ou sans contact, avec rebond ou avecaccrochage.

14 TP2 : Chocs a une dimension
III.1 Configuration du materielVous utiliserez :• 2 cellules photoelectriques, chacune permettant de detecter deux passages d’un
mobile. Elles doivent alors etre placees sur les entrees 1 et 3. (N.B. : il n’est pasnecessaire de debrancher les cellules connectees aux voies 2 et 4) et elles doiventetre espacees d’au moins 50 cm de facon que le choc ait lieu entre les cellules et quela detection des passages des mobiles soit complete (occultation et des-occultation).
• le chronometre dont le bouton central doit alors etre place sur la position 3 :
Remarques importantes :• l’interpretation des valeurs affichees depend de l’experience realisee. Un affichage
qui reste a “0.000” indique que la cellule n’a pas ete occultee. Ceci est par exemplele cas lorsqu’un mobile vient heurter un 2eme mobile au repos. Apres le choc, lesdeux mobiles continuent dans le meme sens et le 1er mobile ne repasse pas devantle premier capteur.• Les durees affichee sont toujours positives mais les vitesses correspondantes peuvent
etre negatives.
III.2 ModelisationDocuments :Document A.4.1Document A.4.2Document A.4.3Document A.4.4
Les concepts essentiels a la comprehension de ce TP sont reunis dans les annexescitees ci-dessus. La lecture de ces annexes est bien sur obligatoire ! On rappel ici lesresultats important pour ce TP :
1. conservation de la quantite de mouvement : La quantite de mouvement d’unsysteme isole se conserve au cours du temps. En particulier, lors du chocs des deuxmobiles, si ceux-ci peuvent etre consideres comme un systeme isole, la somme desquantites de mouvement des mobiles est la meme avant et apres le choc :
~p1 + ~p2 = ~p′1 + ~p′2
ou pi = mivi (i = 1, 2) est la quantite de mouvement du mobile i avant le choc (lesquantites primees designent des quantites mesurees apres le choc).

TP2 : Chocs a une dimension 15
2. choc elastique : Le choc est dit elastique lorsque les masses de chacun des mobilesrestent les meme avant et apres le choc et lorsque l’energie cinetique initiale totaledu systeme constitue des deux mobiles est entierement restituee au systeme apresle choc. on aura donc aussi :
Ec1 + Ec2 = E ′c1 + E ′c2
ou Eci = 12miv
2i =
p2i2mi
(i = 1, 2) est l’energie cinetique du mobile i avant le choc et
E ′ci = 12miv
′2i =
p′2i
2mi(i = 1, 2) est l’energie cinetique du mobile i apres le choc.
III.3 Experimentation
1. Essai preliminaire.• Effectuez un premier choc elastique en lancant tres doucement les mobiles l’un
vers l’autre. Le choc doit avoir lieu entre les cellules. Relevez les durees d’occul-tation et affectez les aux evenements respectifs.• Etant donne l’incertitude estimee sur la vitesse au cours du TP1 (voir Cha-
pitre II) et etant donnees les incertitudes sur les masses, en deduire l’incertitudesur la quantite de mouvement et sur l’energie cinetique des mobiles consideres.
2. Etude de differents chocs. Realisez les chocs suivants :• Choc avec “accrochage” (aiguille–cire)• Choc avec “rebond elastique” (embout plat–elastique)• Choc par “repulsion sans contact” (aimant–aimant)On ne traitera que le cas ou l’un des mobiles est au repos. Pour chacun de ces chocsvous noterez dans un tableau les donnees suivantes :• Vitesses, quantites de mouvement et energie cinetique de chacun des mobiles
avant et apres le choc ; ainsi que les incertitudes correspondantes.• Quantite de mouvement et energie cinetique totale du systeme constitue des
deux mobiles avant et apres le choc ; ainsi que les incertitudes correspondantes.Puis vous repondrez aux questions suivantes en justifiant precisement votre re-ponse :
(a) Le choc est-il elastique ou inelastique ?
(b) Vos experiences sont-elles conformes aux predictions concernant la conserva-tion de la quantite de mouvement et de l’energie cinetique ?
3. Transfert d’energie cinetique. On se propose d’etudier le transfert d’energiecinetique d’un mobile ayant une vitesse initiale v1 sur un mobile repos (v2 = 0).
Dans l’annexe A.4.4, on montre que le rapport R =E′
c2
Ec1caracterisant le taux de
transfert de l’energie cinetique est donne par
R =E ′c2Ec1
= 4m1
m2
(1 +
m1
m2
)−2
ou Ec1 est l’energie cinetique initiale du mobile en mouvement et E ′c2 est l’energiecinetique apres le choc du mobile qui etait initialement au repos.

16 TP2 : Chocs a une dimension
(a) Realisez plusieurs chocs elastiques pour un rapport de masse m1
m2variant de
0.5 a 2. Dans chaque cas, mesurez les valeurs des vitesses et en deduire lesvaleurs des energies cinetiques des mobiles avant et apres le choc, ainsi queles incertitudes associees.
(b) Representez sur un graphe l’evolution de R (exprime en pourcentage) en fonc-tion du rapport des masses des mobiles m1
m2. On representera aussi les incerti-
tudes correspondantes.
(c) Tracez sur ce meme graphe la courbes theorique correspondante. On repre-sentera aussi sur ce graphe les incertitudes attachees aux valeurs theoriques.Conclure.
(d) Dans quelles conditions le transfert d’energie est il maximal ? minimal ?
(e) Donnez des exemples de la vie quotidienne pour les deux cas.
Chapitre IV
TP3 : Le pendule simple
IV.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 18IV.2 Modelisation du pendule . . . . . . . . . . . . . . . . . . . . . . . 18IV.3 Experimentation : pendule simple vertical . . . . . . . . . . . . . . 19IV.4 Experimentation : pendule incline . . . . . . . . . . . . . . . . . . 20
Cette seance est dediee a l’etude du pendule. Les resultats experimentaux serontconfrontes au modele dit du pendule simple. Dans une premiere partie on mesurerala periode du pendule, dans le but de determiner pour quelles valeurs de l’amplitudel’approximation des petites oscillations est elle applicable. Dans une seconde partie onconsiderera un pendule mais ou le plan d’oscillation n’est plus vertical.
18 TP3 : Le pendule simple
IV.1 Configuration du Materiel
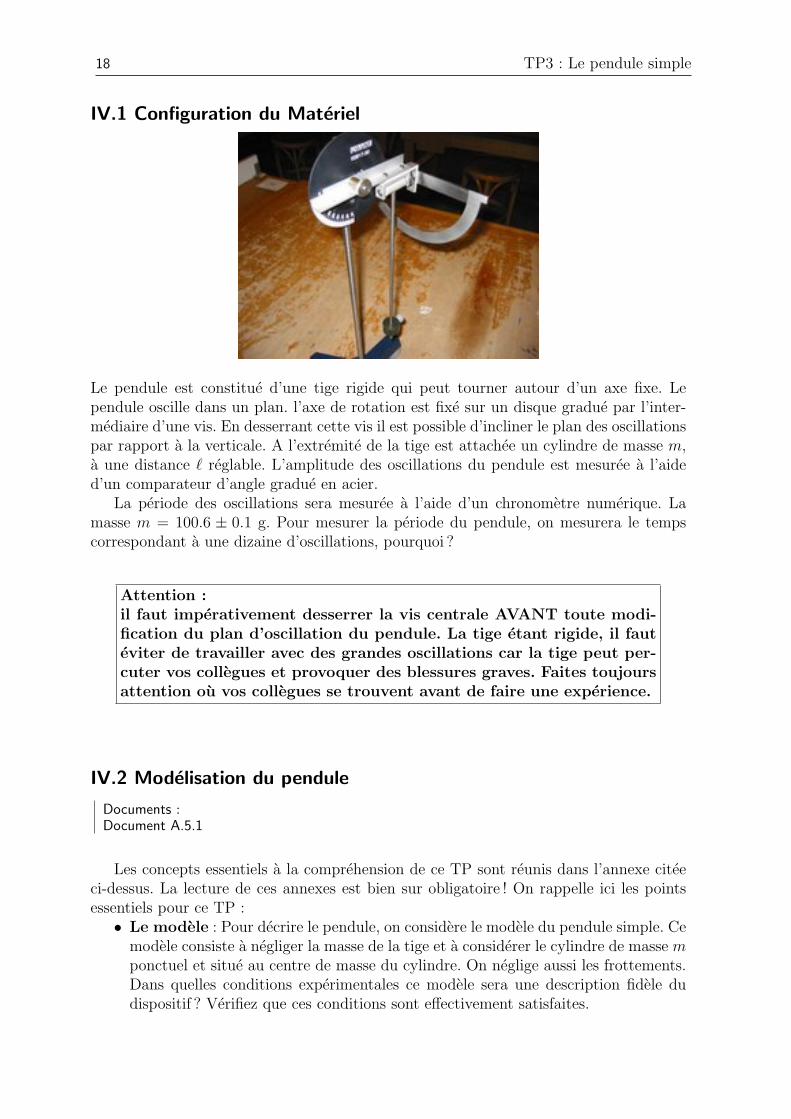
Le pendule est constitue d’une tige rigide qui peut tourner autour d’un axe fixe. Lependule oscille dans un plan. l’axe de rotation est fixe sur un disque gradue par l’inter-mediaire d’une vis. En desserrant cette vis il est possible d’incliner le plan des oscillationspar rapport a la verticale. A l’extremite de la tige est attachee un cylindre de masse m,a une distance ` reglable. L’amplitude des oscillations du pendule est mesuree a l’aided’un comparateur d’angle gradue en acier.
La periode des oscillations sera mesuree a l’aide d’un chronometre numerique. Lamasse m = 100.6 ± 0.1 g. Pour mesurer la periode du pendule, on mesurera le tempscorrespondant a une dizaine d’oscillations, pourquoi ?
Attention :il faut imperativement desserrer la vis centrale AVANT toute modi-fication du plan d’oscillation du pendule. La tige etant rigide, il fauteviter de travailler avec des grandes oscillations car la tige peut per-cuter vos collegues et provoquer des blessures graves. Faites toujoursattention ou vos collegues se trouvent avant de faire une experience.
IV.2 Modelisation du pendule
Documents :Document A.5.1
Les concepts essentiels a la comprehension de ce TP sont reunis dans l’annexe citeeci-dessus. La lecture de ces annexes est bien sur obligatoire ! On rappelle ici les pointsessentiels pour ce TP :• Le modele : Pour decrire le pendule, on considere le modele du pendule simple. Ce
modele consiste a negliger la masse de la tige et a considerer le cylindre de masse mponctuel et situe au centre de masse du cylindre. On neglige aussi les frottements.Dans quelles conditions experimentales ce modele sera une description fidele dudispositif ? Verifiez que ces conditions sont effectivement satisfaites.

TP3 : Le pendule simple 19
• Limite des petites oscillations : Dans la limite des petites oscillations, la periodeT0 du pendule est donnee par l’expression suivante :
T0 = 2π
√`
g. (IV.1)
Cette expression est remarquable pour deux raisons :– La periode T0 ne depend pas de la masse m.– La periode T0 ne depend pas de l’amplitude des oscillations.La premiere restera valable que si les frottements peuvent etre negliges. La seconden’est valable que si l’amplitude des oscillations est suffisamment faible.• Ecart a l’approximation des petits angles : Si l’amplitude des oscillations
n’est plus suffisamment faible, la periode T du pendule peut s’ecrire sous la formed’une serie (voir Eq. (A.5.7)). La periode T1, compte tenu de la premiere correctiona l’approximation des faibles amplitudes est :
T1 = T0
(1 +
θ20
16
), (IV.2)
ou θ0 est l’amplitude du pendule.• Plan des oscillations incline : Incliner le plan des oscillations du pendule simple
d’un angle φ par rapport a la verticale est equivalent a diminuer la valeur de l’ac-celeration de la pesanteur d’un facteur cosφ. Dans le limite des petites oscillationsla periode T0(φ) du pendule incline est donnee par :
T0(φ) = 2π
√`
g cosφ. (IV.3)
IV.3 Experimentation : pendule simple vertical
1. Mesurez la periode Texp du pendule pour plusieurs valeurs de l’amplitude θ0 ∈[5, 70]. Pour chaque valeur de θ0 on fera plusieurs mesures de la periode et onestimera l’incertitude δT sur la mesure de la periode. On reportera ces resultatsdans un tableau.
2. Mesurez ` et calculez la valeur theorique T0 de la periode du pendule dans l’ap-proximation des petits angles. Compte tenu de l’incertitude δ` et δg, calculer δT0
l’incertitude sur T0.
3. Faire un graphique sur du papier millimetre representant la periode Texp en fonctionde θ0. On reportera sur ce graphique la valeur theorique T0 de la periode dansla limite des petits angles. On tracera aussi les incertitudes de mesure ainsi quel’incertitude sur la valeur theorique δT0.
4. Pour quelles valeurs de l’amplitude θ0 l’expression theorique T0 donnee par l’equa-tion (IV.1), est elle suffisante pour decrire vos resultats de mesure ? Justifier pre-cisement votre reponse.
5. Pour quelles valeurs de θ0 l’expression T1, donnee par l’equation (IV.2), est ellesuffisante pour decrire vos resultats de mesure ? Justifier precisement votre reponse.

20 TP3 : Le pendule simple
IV.4 Experimentation : pendule incline
1. Mesurez la periode Texp des oscillations du pendule incline, pour plusieurs valeursde l’angle d’inclinaison φ du plan des oscillations par rapport a la verticale. Pourchaque valeur de φ, on estimera l’incertitude sur la mesure de la periode. On resteradans le regime des faibles amplitudes d’oscillation.
2. Faites un graphique qui permet de comparer simplement vos mesure avec l’expres-sion theorique donnee par l’equation (IV.3). Conclure.
Chapitre V
TP4 : Referentiels en rotation –pseudo forces
V.1 Pendule de Foucault . . . . . . . . . . . . . . . . . . . . . . . . . 22V.1.1 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 22V.1.2 Experimentation . . . . . . . . . . . . . . . . . . . . . . 22
V.2 Plateforme en rotation . . . . . . . . . . . . . . . . . . . . . . . . 22V.2.1 Configuration du Materiel . . . . . . . . . . . . . . . . . 23V.2.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . 23V.2.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . 24
Cette seance est dediee a l’etude des referentiels en rotation, elle s’articule en deuxparties :• Une premiere partie ou l’on met en evidence la rotation de la terre en mesurant la
rotation du plan des oscillations d’un pendule de Foucault.• Une seconde partie permettant la mesure de la pseudo–force centrifuge qui s’exerce
sur un mobile sur une plateforme en rotation.

22 TP4 : Referentiels en rotation – pseudo forces
V.1 Pendule de FoucaultLe but du TP est de determiner la latitude de la salle de TP en mesurant l’angle
dont a tourne le plan des oscillations du pendule, pendant un certain temps.
V.1.1 Modelisation
Documents :Document A.6.2
Vous trouverez dans l’annexe citee ci-dessus les elements theoriques concernant lependule de Foucault. La lecture de cette annexe est bien sur obligatoire pour la compre-hension de ce TP.
On rappelle dans cette section les points suivants :• L’experience du pendule de Foucault est une demonstration locale de la rotation de
la Terre sur elle meme. L’experience montre que le plan des oscillations du pendulen’est pas fixe mais qu’il tourne.• Cette rotation du plan des oscillations, peut etre interpretee comme l’effet de la
force de Coriolis sur le pendule en mouvement. En effet la Terre tournant sur elle-meme, elle ne constitue pas un referentiel galileen, le mouvement d’un mobile dansun tel referentiel est soumis a des forces d’inertie dont la force de Coriolis.• Soient T le temps que met le plan des oscillations a faire un tour complet et T0 le
temps que met la Terre a faire un tour sur elle meme (T0 est appele le jour sideral,T0 = 23h 56 mn 4 s ou encore T0 = 86164 s). On demontre que :
T =T0
sinλ(V.1.1)
V.1.2 Experimentation
1. Mesurer l’angle α0 (par rapport a une direction arbitraire) que fait le plan desoscillations du pendule en debut de seance. Evaluer l’incertitude de mesure δα0
2. Dans quel sens le plan d’oscillation du pendule va tourner ? expliquer pourquoi.
3. Apres un certain temps τ (τ ' 3 h), mesurer a nouveau cet angle qu’on notera α1.On note α = α1 − α0 l’angle de deviation. On estimera les incertitudes de mesureδτ et δα1. On donnera aussi l’incertitude δα sur l’angle α.
4. En deduire le temps T que met le plan des oscillations a faire un tour complet,ainsi que l’incertitude δT .
5. En utilisant l’equation (V.1.1) en deduire la latitude λ de la salle de TP.
6. Calculer l’incertitude δλ en fonction de l’incertitude δT (on negligera l’incertitudesur T0). Donner la valeur de δλ.
V.2 Plateforme en rotation
V.2 Plateforme en rotation 23
V.2.1 Configuration du Materiel
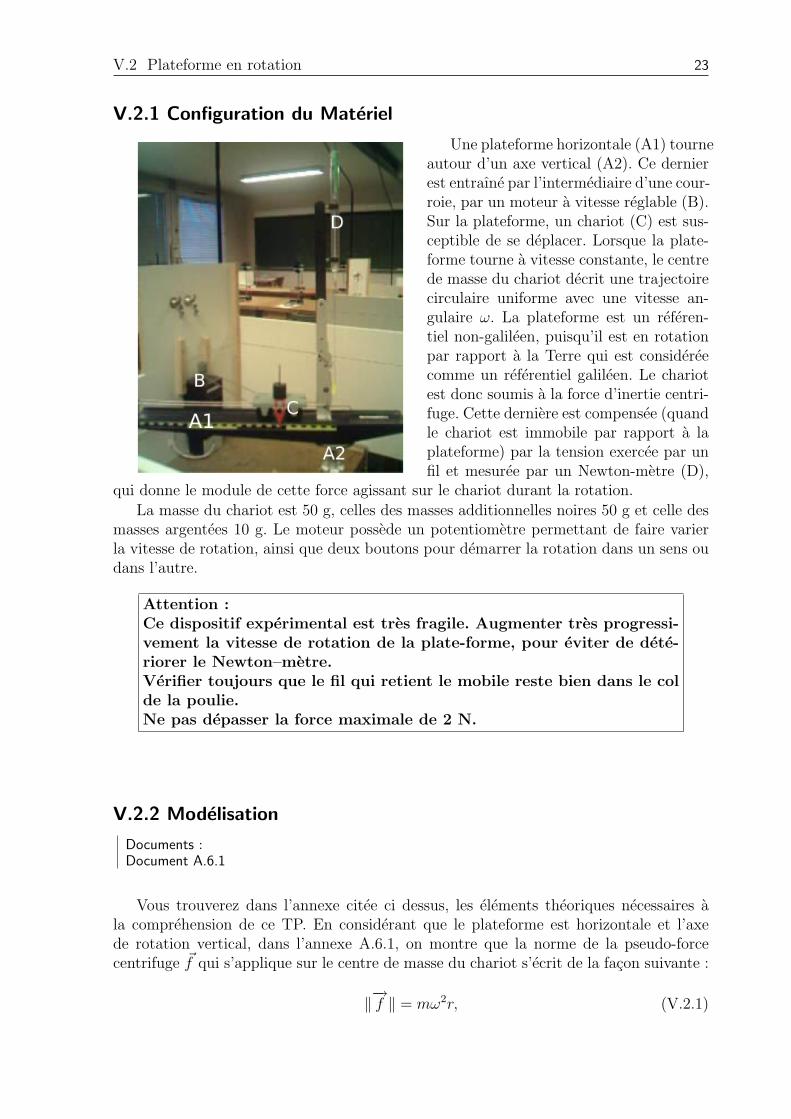
Une plateforme horizontale (A1) tourneautour d’un axe vertical (A2). Ce dernierest entraıne par l’intermediaire d’une cour-roie, par un moteur a vitesse reglable (B).Sur la plateforme, un chariot (C) est sus-ceptible de se deplacer. Lorsque la plate-forme tourne a vitesse constante, le centrede masse du chariot decrit une trajectoirecirculaire uniforme avec une vitesse an-gulaire ω. La plateforme est un referen-tiel non-galileen, puisqu’il est en rotationpar rapport a la Terre qui est considereecomme un referentiel galileen. Le chariotest donc soumis a la force d’inertie centri-fuge. Cette derniere est compensee (quandle chariot est immobile par rapport a laplateforme) par la tension exercee par unfil et mesuree par un Newton-metre (D),
qui donne le module de cette force agissant sur le chariot durant la rotation.
La masse du chariot est 50 g, celles des masses additionnelles noires 50 g et celle desmasses argentees 10 g. Le moteur possede un potentiometre permettant de faire varierla vitesse de rotation, ainsi que deux boutons pour demarrer la rotation dans un sens oudans l’autre.
Attention :Ce dispositif experimental est tres fragile. Augmenter tres progressi-vement la vitesse de rotation de la plate-forme, pour eviter de dete-riorer le Newton–metre.Verifier toujours que le fil qui retient le mobile reste bien dans le colde la poulie.Ne pas depasser la force maximale de 2 N.
V.2.2 Modelisation
Documents :Document A.6.1
Vous trouverez dans l’annexe citee ci dessus, les elements theoriques necessaires ala comprehension de ce TP. En considerant que le plateforme est horizontale et l’axede rotation vertical, dans l’annexe A.6.1, on montre que la norme de la pseudo-forcecentrifuge ~f qui s’applique sur le centre de masse du chariot s’ecrit de la facon suivante :
‖−→f ‖ = mω2r, (V.2.1)

24 TP4 : Referentiels en rotation – pseudo forces
ou m est la masse du chariot, ω est la vitesse angulaire de la plateforme et r la distanceentre le centre de masse du chariot et l’axe de rotation.
Pourquoi, la salle de TP est-elle consideree ici comme un referentiel galileen ? alorsque dans l’etude du pendule de Foucault, on tient compte explicitement de la rotationde la Terre sur elle meme, et que cette derniere ne constitue pas un referentiel galileen.
V.2.3 Experimentation
L’objectif est de chercher empiriquement l’expression de la pseudo-force centrifugequi agit sur le chariot.
On ecrira la norme de la force centrifuge sous la forme
f = Amαrβωγ,
ou A est une constante sans dimension. Le but du TP est de determiner les exposantsα, β et γ.
1. Etalonnage du Newton–metre : Il est necessaire d’etalonner le Newton–metre,c’est-a-dire etablir la correspondance entre la valeur de la force lue sur les gra-duations, et celle s’exercant sur l’appareil. Utiliser les masses de 50 g et de 10 gpour etalonner le Newton–metre, a l’aide des petits plateaux (m = 1 g) a votredisposition.
2. Mesure de γ : On veut mesurer la force f pour plusieurs valeurs de la vitesseangulaire, tout en gardant r etm constants. Il est facile de garder la masse constantemais plus difficile de verifier que la distance a l’axe r reste la meme pour des vitessesangulaires differentes.
On propose donc le protocole suivant : On choisi une distance r que l’on veutgarder constante. La plateforme etant a l’arret, on place le Newton–metre de facona ce qu’il mesure une force f = f0 non nulle lorsque le chariot est positionne a ladistance r. On met la plateforme en mouvement et on regle la vitesse angulaireω de telle sorte que la force affichee sur le Newton–metre soit justement f0. Onmesure alors la periode de rotation T de la plateforme a l’aide du chronometre eton en deduit la vitesse angulaire ω. Justifier que ce protocole permet effectivementde mesurer f en fonction ω en gardant r constant.
• Faites l’acquisition d’un premier couple (f , T ), ou T est la periode de rotation,avec une masse de 50 g sur le chariot. Attendre une dizaine de secondes quele Newton–metre se stabilise avant de debuter une mesure. Est-il preferable demesurer la periode sur un tour ou sur plusieurs tours ? Justifier precisement votrereponse.• Augmentez petit a petit la vitesse de rotation et mesurer ainsi quatre points
(f ,T ) ainsi que les incertitudes associees.• Tracez ln(f) en fonction de ln(ω) sur du papier millimetre.• En effectuant une regression lineaire du type y = ax+ b, deduisez-en la pente de
la droite, et evaluez l’incertitude correspondante, en considerant les droites depentes maximun et minimum.• La valeur de l’exposant γ mesure est il en accord avec l’expression theorique de
l’Eq. (V.2.1) ?

V.2 Plateforme en rotation 25
3. Mesure de α : Le principe de la manipulation est semblable a celui de la questionprecedente, mais cette fois, il faut faire varier la masse totale du chariot, tout enconservant la meme vitesse de rotation et la meme distance r.• Surchargez le chariot avec une masse de 150 g et positionnez-le a une distance r
d’environ 15 cm.• Choisissez une periode de rotation d’environ 1 s et mesurez f .• Quel protocole experimental imaginer pour effectuer les mesures a r constant ?
Discutez-en avec l’enseignant.• Coupez l’alimentation du moteur sans modifier le reglage de la vitesse de rota-
tion. Diminuez la masse de la surcharge et verifiez que la periode de rotation estinchangee (l’ajuster si necessaire). Faites une nouvelle acquisition.• Refaites ainsi 3 ou 4 mesures, pour des masses de plus en plus faibles.• Tracez f(m).• Effectuez une regression lineaire. Quelle relation lie f et m ?• Vos mesures sont elles en accord avec la valeur theorique de α.
Chapitre VI
TP5 : Mesure du moment d’inertied’un solide
VI.1 Configuration du Materiel . . . . . . . . . . . . . . . . . . . . . . 27VI.2 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27VI.3 Experimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Le but de ce TP est de determiner le moment d’inertie, par rapport a un axe derotation, de differents solides. Pour cela on mesurera la periode des oscillations de torsiondu solide autour de l’axe.
TP5 : Mesure du moment d’inertie d’un solide 27
VI.1 Configuration du Materiel
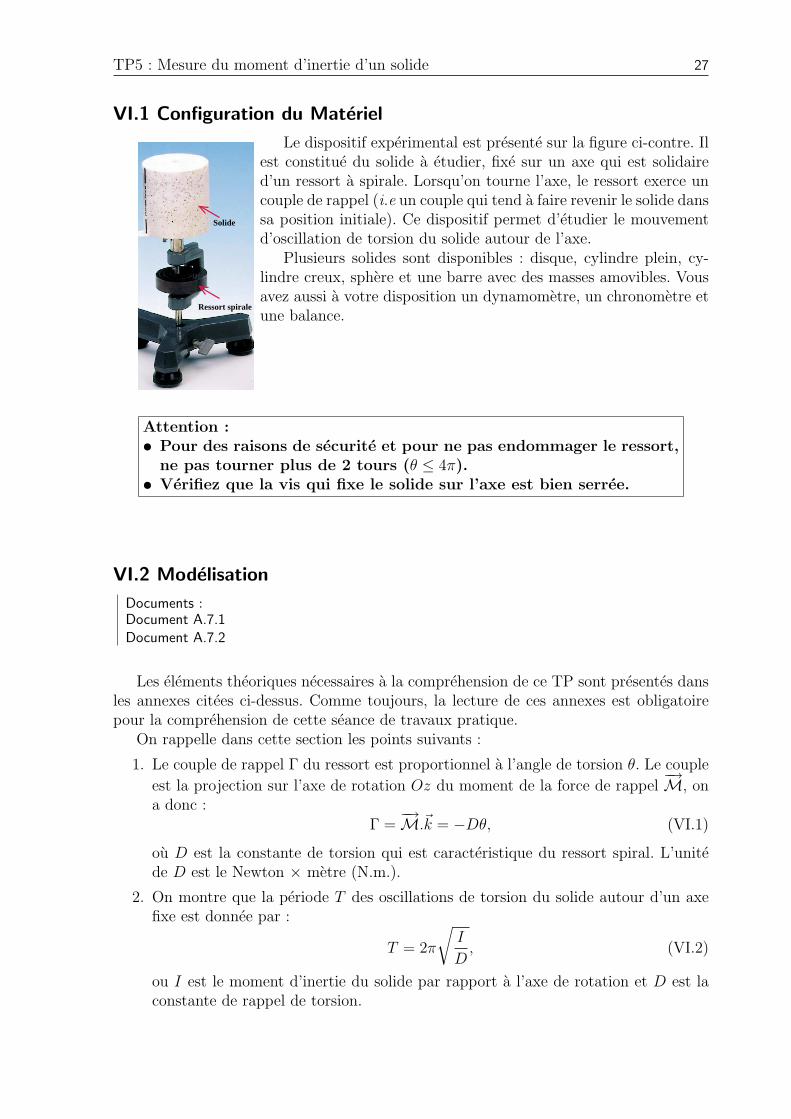
Le dispositif experimental est presente sur la figure ci-contre. Il
Ressort spirale
Solide
est constitue du solide a etudier, fixe sur un axe qui est solidaired’un ressort a spirale. Lorsqu’on tourne l’axe, le ressort exerce uncouple de rappel (i.e un couple qui tend a faire revenir le solide danssa position initiale). Ce dispositif permet d’etudier le mouvementd’oscillation de torsion du solide autour de l’axe.
Plusieurs solides sont disponibles : disque, cylindre plein, cy-lindre creux, sphere et une barre avec des masses amovibles. Vousavez aussi a votre disposition un dynamometre, un chronometre etune balance.
Attention :• Pour des raisons de securite et pour ne pas endommager le ressort,
ne pas tourner plus de 2 tours (θ ≤ 4π).• Verifiez que la vis qui fixe le solide sur l’axe est bien serree.
VI.2 Modelisation
Documents :Document A.7.1Document A.7.2
Les elements theoriques necessaires a la comprehension de ce TP sont presentes dansles annexes citees ci-dessus. Comme toujours, la lecture de ces annexes est obligatoirepour la comprehension de cette seance de travaux pratique.
On rappelle dans cette section les points suivants :
1. Le couple de rappel Γ du ressort est proportionnel a l’angle de torsion θ. Le couple
est la projection sur l’axe de rotation Oz du moment de la force de rappel−→M, on
a donc :Γ =−→M.~k = −Dθ, (VI.1)
ou D est la constante de torsion qui est caracteristique du ressort spiral. L’unitede D est le Newton × metre (N.m.).
2. On montre que la periode T des oscillations de torsion du solide autour d’un axefixe est donnee par :
T = 2π
√I
D, (VI.2)
ou I est le moment d’inertie du solide par rapport a l’axe de rotation et D est laconstante de rappel de torsion.
28 TP5 : Mesure du moment d’inertie d’un solide
VI.3 Experimentation
1. Mesure du couple : Fixez la barre sur l’axe en son centre. Pour mesurer lecouple (ou moment de la force par rapport a l’axe) de rappel du ressort on fixera ledynamometre sur la barre, a une distance r de l’axe de rotation. On fera tourner labarre d’un angle θ en tirant sur l’autre extremite du dynamometre. La direction dudynamometre sera maintenue horizontale et perpendiculaire a la barre, pourquoi ?
Pour une valeur de θ fixee on mesure la norme de la force ‖−→F ‖ qui s’exerce sur le
dynamometre, puis on en deduit le couple. Pour une valeur de θ fixee et differentesvaleurs de r, faites plusieurs mesures de la force de rappel et calculez le couple.Compte tenu des incertitudes de mesure, verifier que le couple de depend pas de r.
2. Determination de D :
(a) Premiere methode (statique) : Fixez la barre sur l’axe. A l’aide du dyna-mometre, mesurez la force de rappel du ressort et en deduire le moment de laforce par rapport a l’axe, pour plusieurs valeurs de l’angle θ ∈ [0, 4π]. Verifiezla relation (VI.1) et en deduire D ainsi que son incertitude absolue δD et sonincertitude relative δD
D.
(b) Seconde methode (dynamique) : Fixez les deux masses amovibles a labarre, et fixer le tout sur l’axe de facon symetrique, de telle sorte que le centrede masse soit confondu avec l’axe de rotation. En utilisant la relation A.7.3,montrer qu’en mesurant la periode des oscillations T en fonction de la distancer des masses a l’axe de rotation, on peut determiner la constante de torsionD et le le moment d’inertie I0 de la barre seule. Pour mesurer la periode derotation, on tournera la barre d’un demi-tour, puis on mesurera a l’aide duchronometre la periode de rotation. La masse de chacune des masses amoviblessera determinee a l’aide de la balance.
3. Moment d’inertie de plusieurs solides : Mesurer la periode d’oscillation detorsion T de plusieurs solides et en deduire, en utilisant la relation (VI.2), le momentd’inertie I par rapport a l’axe de rotation. En tenant compte des incertitudes,comparer les valeurs obtenues avec les valeurs theoriques (voir table ci-dessous).Pour mesurer la periode de rotation, on tournera le solide d’un demi-tour, puis onmesurera a l’aide du chronometre la periode de rotation.
Solide r (cm) I
Cylindre plein 4.9 mr2/2Cylindre creux re/ri = 5.0/4.6 m(r2
e + r2i )/2
Sphere 7.0 2mr2/5
Les masses des differents solides seront determinees a l’aide de la balance.
Annexe A
Documents
A.1 Incertitudes dans les mesures . . . . . . . . . . . . . . . . . . . . . 30A.2 Elements de mecanique . . . . . . . . . . . . . . . . . . . . . . . . 33A.3 Elements theoriques relatifs au TP1 . . . . . . . . . . . . . . . . . 36A.4 Elements theoriques relatifs au TP2 . . . . . . . . . . . . . . . . . 37A.5 Elements theoriques relatifs au TP3 . . . . . . . . . . . . . . . . . 40A.6 Elements theoriques relatifs au TP4 . . . . . . . . . . . . . . . . . 44A.7 Elements theoriques relatifs au TP5 . . . . . . . . . . . . . . . . . 50

30 Documents
A.1 Incertitudes dans les mesures
Document A.1.1 Incertitudes dans les mesures1. Origine des erreurs de mesures : Au cours d’une experience, les erreurs de
mesures peuvent provenir de plusieurs sources :
(a) de la facon de faire la mesure. Par exemple si vous mesurez une duree entredeux evenements a l’aide d’un chronometre, il y aura une incertitude surl’instant de declenchement du chronometre. Ce type d’incertitude doit etreevaluee sur place (en effectuant plusieurs mesures par exemples).
(b) de l’appareil de mesure lui meme, par exemple, la precision du chronometre.Cette incertitude est en general donnee par le constructeur.
2. Definition : Au cours d’une experience, on mesure une grandeur physique Get on obtient la valeur Gexp. On estime que la valeur exacte Gex de G doitse trouver dans l’intervalle [Gexp − δG,Gexp + δG] ou δG > 0 est l’incertitudeabsolue sur G.
L’incertitude relative sur G sera definie par le rapport δG|Gexp| . L’incertitude re-
lative s’exprime souvent en pourcentage.
La dimension de l’incertitude absolue δG est la meme que celle de G. L’incer-titude relative n’a pas de dimension.
3. Calculs d’incertitude : Souvent, la grandeur physique que l’on cherche a eva-luer n’est pas mesuree directement. Par exemple on ne mesure pas la vitessev d’un mobile mais son deplacement ` pendant un temps t. v est une fonctiondes quantites mesurees : v = `
t. De facon generale, on mesure des grandeurs
x, y, z, · · · avec les incertitudes respectives δx, δy, δz, · · · et la grandeur G cher-chee est une fonction de x, y, z, · · · : G = f(x, y, z, · · · ). La question est la sui-vante : connaissant les valeurs mesurees xexp, yexp, zexp, · · · et les incertitudesassociees δx, δy, δz, · · · comment evaluer l’incertitude sur G ?
Supposons que G ne depend que d’une quantite mesuree x : G = f(x). Sixexp est la mesure obtenue pour x, on obtient pour G la valeur experimentaleGexp = f(xexp). La valeur exacte de x peut s’ecrire xex = xexp + ∆x ou ∆x estdans l’intervalle [−δx,+δx]. La valeur exacte de G sera donc donnee par :
Gex = f(xex) = f(xexp + ∆x).
En general (si l’experience est bien faite) l’incertitude δx (et donc aussi |∆x|)est tres petite devant |xexp|. On peut donc approcher la valeur exacte de G parson developpement limite au premier ordre :
Gex ' f(xexp) +df
dx(xexp)∆x,
ou dfdx
(xexp) designe la derivee de la fonction f calculee en x = xexp. En utilisantla definition Gexp = f(xexp) on peut ecrire cette derniere equation de la faconsuivante :
Gex −Gexp 'df
dx(xexp)∆x.

A.1 Incertitudes dans les mesures 31
L’incertitude sur G sera definie par le maximum de la valeur absolue du membrede droite :
δG ≡∣∣∣∣ dfdx(xexp)
∣∣∣∣ δx.On generalise au cas ou G est une fonction de plusieurs quantites mesurees dela facon suivante : Soit G = f(x, y), et soit xexp, yexp les quantites mesurees. Ondefinit Gexp = f(xexp, yexp) la valeur experimentale de G (nous nous contentonsdu cas a 2 variables (x et y), mais le cas a N variables se traite de la memefacon). La valeur exacte de G pourra s’ecrire :
Gex = f(xex, yex) = f(xexp + ∆x, yexp + ∆y),
ou −δx ≤ ∆x ≤ +δx et −δy ≤ ∆y ≤ +δy. On peut approcher l’expression deGex par son developpement limite au premier ordre (d’une fonction a plusieursvariables) :
Gex ' f(xexp, yexp) +∂f
∂x(xexp, yexp)∆x+
∂f
∂y(xexp, yexp)∆y,
ou ∂f∂x
(xexp, yexp) designe la derivee partielle de la fonction f par rapport a x
evaluee en x = xexp et y = yexp (la derivee partielle ∂f∂x
s’obtient en derivant lafonction f(x, y) par rapport a x en considerant que y est une constante). Onpourra ecrire :
Gex −Gexp '∂f
∂x(xexp, yexp)∆x+
∂f
∂y(xexp, yexp)∆y, (A.1.1)
qui exprime (de facon approche) l’ecart entre la valeur exacte et la valeurmesuree de G. L’incertitude sur G est definie de la facon suivante :
δG ≡∣∣∣∣∂f∂x (xexp, yexp)
∣∣∣∣ δx+
∣∣∣∣∂f∂y (xexp, yexp)
∣∣∣∣ δyc’est un majorant de la valeur absolue du membre de droite de l’equation A.1.1.
En conclusion :
Soit G une grandeur physique dependant de plusieurs quantites mesu-rees x, y, z, · · · :
G = f(x, y, z, · · · )
l’incertitude absolue δG sur G est calculee de la facon suivante :
δG =
∣∣∣∣∂f∂x∣∣∣∣ δx+
∣∣∣∣∂f∂y∣∣∣∣ δy +
∣∣∣∣∂f∂z∣∣∣∣ δz + · · ·
ou les derivees partielles sont calculees en x = xexp, y = yexp, z =zexp, · · · et δx, δy, δz, · · · sont les incertitudes associees aux quantitesmesurees respectives x, y, z, · · · .

32 Documents
4. Exemple : On veut mesurer la vitesse v d’un mobile. Pour cela on mesure letemps t = 10± 1 s qu’il met pour parcourir une distance ` = 12.0± 0.5 cm. Lavitesse v est la grandeur G cherchee. C’est une fonction de ` et t :
v = f(`, t) =`
t.
On a texp = 10 s, `exp = 12.0 cm, δt = 1 s et δ` = 0.5 cm. La valeur experimen-tale vexp de la vitesse est donnee par :
vexp =`exp
texp
=12
10= 1.2 cm/s.
Pour calculer l’incertitude sur v on calcule les derivees partielles de la fonctionf(`, t) = `
t:
∂f
∂`(`, t) =
1
t∂f
∂t(`, t) = − `
t2.
L’incertitude sur la vitesse sera donnee par :
δv =
∣∣∣∣∂f∂` (`exp, texp)
∣∣∣∣ δ`+
∣∣∣∣∂f∂t (`exp, texp)
∣∣∣∣ δt=
1
texp
δ`+`
t2exp
δt
=1
10× 0.5 +
12
102× 1 = 0.05 + 0.12 = 0.17 cm/s.
On ecrira finalement : v = 1.2± 0.2 cm/s.
Remarque : Nous n’avons pas ecrit v = 1.2± 0.17 cm/s pourquoi ?
5. Incertitude relative : Pour calculer l’incertitude relative on peut calculerl’incertitude absolue δG et evaluer le rapport δG
|Gexp| . Il est souvent plus simple
d’obtenir une relation qui permet d’exprimer l’incertitude relative sur G enfonction des incertitudes relatives sur les quantites mesurees δx
|x| ,δy|y| ,
δz|z| , · · · .
Pour obtenir cette relation supposons qu’au lieu de chercher l’incertitude sur G,on cherche l’incertitude absolue sur la grandeur L = ln(G) = ln[f(x, y, z, · · · )](ln designe la fonction logarithme neperien). Dans un premier temps on peutconsiderer que la grandeur L ne depend que de la variable G par l’intermediairede la fonction logarithme. L’incertitude absolue sur L s’ecrit donc :
δL =
∣∣∣∣ dLdG∣∣∣∣ δG =
∣∣∣∣d ln(G)
dG
∣∣∣∣ δG =δG
|G|.
L’incertitude absolue sur L = ln(G) est justement l’incertitude relative surG. L’incertitude relative s’obtient par la derivee logarithmique de G. On auradonc :
δG
|G|=
∣∣∣∣ ∂∂x ln[f(x, y, · · · )]∣∣∣∣ δx+
∣∣∣∣ ∂∂y ln[f(x, y, · · · )]∣∣∣∣ δy + · · · (A.1.2)

A.2 Elements de mecanique 33
Dans le cas particulier ou la fonction f(x, y, z, · · · ) est un produit de puissancesdes quantites x, y, z, · · · , l’ expression A.1.2 se simplifie. En effet, consideronsque la grandeur G, dont on cherche a calculer l’incertitude relative, depend desquantites mesurees de la facon suivante :
G = f(x, y, z) = x`ymzn,
ou `, m et n sont des entiers relatifs (positif ou negatifs), alors :
∂
∂xln[f(x, y, z)] =
∂
∂xln(x`ymzn) =
∂
∂x[` ln(x) +m ln(y) + n ln(n)] =
`
x.
De la meme facon on obtient :
∂
∂yln[f(x, y, z)] =
m
y;
∂
∂zln[f(x, y, z)] =
n
z.
En utilisant l’equation A.1.2, on obtient l’incertitude relative sur G :
δG
|G|= |`| δx
|x|+ |m| δy
|y|+ |n| δz
|z|,
qui s’exprime tres simplement en fonction des incertitudes relatives sur lesquantites mesurees.
En conclusion :
Si la grandeur physique G depend des quantites mesurees x, y, z · · · dela facon suivante :
G = x`ymzn · · · ,
alors l’incertitude relative δG|G| s’exprime directement en fonction des
incertitudes relatives δx|x| ,
δy|y| ,
δz|z| , · · · des quantites mesurees :
δG
|G|= |`| δx
|x|+ |m| δy
|y|+ |n| δz
|z|+ · · ·
6. Exemple : Reprenons l’exemple precedent et calculons l’incertitude relative δv|v|
sur la vitesse du mobile. Les incertitudes relatives sur les quantites mesureessont : δ`|`| = 0.5
12' 4% et δt
|t| = 110
= 10%. Comme v = `t
= `×t−1 on a δv|v| = δ`
|`|+δt|t| .
Donc donc δv|v| = 14%. On verifie que δv = δv
|v| × |v| = 14100× 1.2 = 0.17 cm/s ;
qui est bien le resultat que nous avions obtenu precedemment.
A.2 Elements de mecanique

34 Documents
Document A.2.1 Cinematique1. Referentiel : On appelle referentiel un systeme d’axes lie a un solide indefor-
mable. Un observateur, immobile par rapport a ce referentiel, pourra decrirele mouvement d’un objet : mouvement de la Terre dans un referentiel helio-centrique, mouvement d’un satellite dans un referentiel geocentrique, ou d’unballon dans un referentiel terrestre.
2. Repere : Une fois le referentiel choisi, il est necessaire de definir un repere,c’est-a-dire une base orthonormee de vecteurs, permettant de determiner lescoordonnees du point materiel dont on etudie le mouvement. Il permet egale-ment de definir les composantes de tout vecteur associe au mouvement de cepoint (vitesse, force, etc. . .). Ainsi, la position d’un point M est definie dans
un referentiel par les coordonnees du vecteur−−→OM , ou O est un point fixe du
referentiel.
3. Equation horaire et trajectoire : Le mouvement d’un point M conduita etudier l’evolution de ce dernier au cours du temps et a donner l’equation
horaire du mouvement par−−→OM(t) ou ses composantes dans le repere choisi. La
courbe decrite par un point M au cours du mouvement est appelee trajectoire.
4. Vitesse : Si, a la date t1, le point M occupe la position M1, et a la date t2 laposition M2, la vitesse moyenne ~vmoy :
~vmoy =
−−−−→M1M2
t2 − t1=
∆−−→OM
∆t,
ou on a note ∆−−→OM la variation du vecteur position
−−→OM2−
−−→OM1 =
−−−−→M1M2 ; et
∆t = t2 − t1.
La notion de vitesse instantanee decoule de cette definition. En effet, en prenantdes positions separees par un intervalle de temps ∆t de plus en plus court, on serapproche de la vitesse a une date donnee. On definit alors la vitesse instantaneecomme etant :
~v(t) = lim∆t→0
∆−−→OM
∆t=
d
dt
−−→OM(t).
5. Acceleration : De la meme facon, on definit le vecteur l’acceleration instan-tanee comme la derivee par rapport au temps du vecteur vitesse :
~a(t) =d
dt~v(t) =
d2
dt2−−→OM(t).
Document A.2.2 Dynamique1. 1ere loi de Newton : Dans un referentiel galileen, un systeme isole, c’est a dire
qui n’est soumis a aucune force, est soit au repos, soit anime d’un mouvementde translation rectiligne et uniforme.
Ce principe postule l’existence de referentiels galileens et en donne une de-finition a partir du mouvement d’un systeme isole. Pour les experiences quiseront effectuees dans le TP1, les effets du mouvement de la Terre (rotation

A.2 Elements de mecanique 35
sur elle-meme, mouvement autour du Soleil) seront negliges. Ainsi, le “referen-tiel du laboratoire” sera considere comme galileen. En revanche, dans le TP3ou nous etudierons le mouvement d’un mobile dans un referentiel non galileenen rotation, le principe d’inertie ne sera plus verifie.
2. Seconde loi de Newton : Dans un referentiel galileen, l’acceleration ~a d’unpoint materiel, de masse m, soumis a une force ~F est donnee par :
m~a = ~F .
3. Theoreme du centre d’inertie : Le centre d’inertie (ou centre de masse) Gd’un systeme de N points materiels Mi de masse mi, reperes par leurs vecteurs
positions−−→OM i (i = 1, 2, · · ·N) est definie par :
M−→OG =
N∑i=1
mi
−−→OM i,
ou M est la masse totale du systeme de N points materiels : M =∑N
i=1mi.
Dans un referentiel galileen, l’acceleration ~aG du centre d’inertie d’un systememateriel obeit a la relation suivante :
M~aG =N∑i=1
~F exti ,
ou ~F exti est la force exterieure qui s’applique au point Mi.
4. 3eme loi de Newton : Lorsqu’un solide exerce une force sur un autre solide,ce dernier exerce sur le premier solide une force de meme norme de memedirection, mais de sens oppose.
Document A.2.3 Energie1. Travail d’une force : Le travail WAB(~F ) d’une force ~F constante, sur un
deplacement rectiligne−→AB est definie par le produit scalaire entre les vecteurs
force et le vecteur deplacement :
WAB(~F ) = ~F .−→AB.
Cette definition sera suffisante pour les travaux pratiques. Elle sera generali-see en cours au cas d’une force non constante et a un deplacement curvilignequelconque.
2. Energie cinetique : L’energie cinetique Ec d’une masse m animee d’une vi-tesse ~v est definie par :
Ec =1
2m‖−→v ‖2.
3. Theoreme de l’energie cinetique : Dans un referentiel galileen, la variationd’energie cinetique d’un solide entre deux instants tA et tB est egale au travail
36 Documents
des forces exterieures sur le deplacement du centre d’inertie du solide entre lesdeux instants consideres :
Ec(tB)− Ec(tA) = WAB(~F ),
ou A et B sont les positions du centre d’inertie du solide aux instants tA et tBrespectivement.
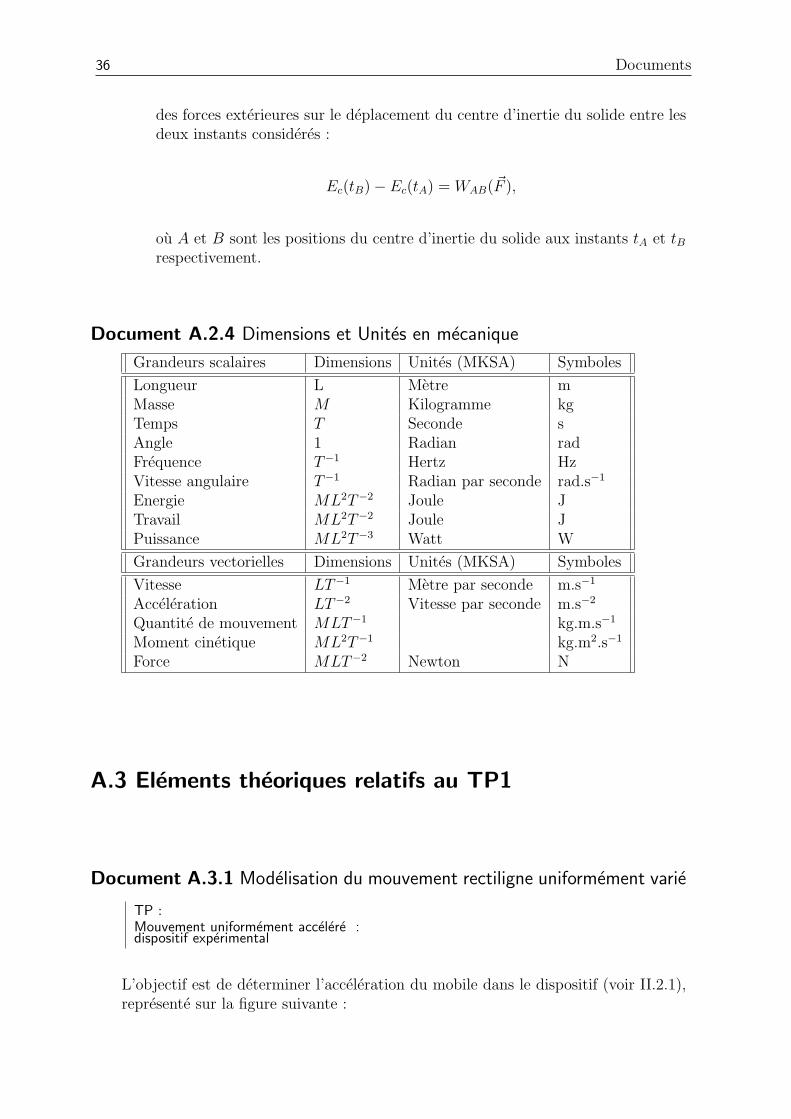
Document A.2.4 Dimensions et Unites en mecanique
Grandeurs scalaires Dimensions Unites (MKSA) Symboles
Longueur L Metre mMasse M Kilogramme kgTemps T Seconde sAngle 1 Radian radFrequence T−1 Hertz HzVitesse angulaire T−1 Radian par seconde rad.s−1
Energie ML2T−2 Joule JTravail ML2T−2 Joule JPuissance ML2T−3 Watt W
Grandeurs vectorielles Dimensions Unites (MKSA) Symboles
Vitesse LT−1 Metre par seconde m.s−1
Acceleration LT−2 Vitesse par seconde m.s−2
Quantite de mouvement MLT−1 kg.m.s−1
Moment cinetique ML2T−1 kg.m2.s−1
Force MLT−2 Newton N
A.3 Elements theoriques relatifs au TP1
Document A.3.1 Modelisation du mouvement rectiligne uniformement varie
TP :Mouvement uniformement accelere :dispositif experimental
L’objectif est de determiner l’acceleration du mobile dans le dispositif (voir II.2.1),represente sur la figure suivante :
A.4 Elements theoriques relatifs au TP2 37
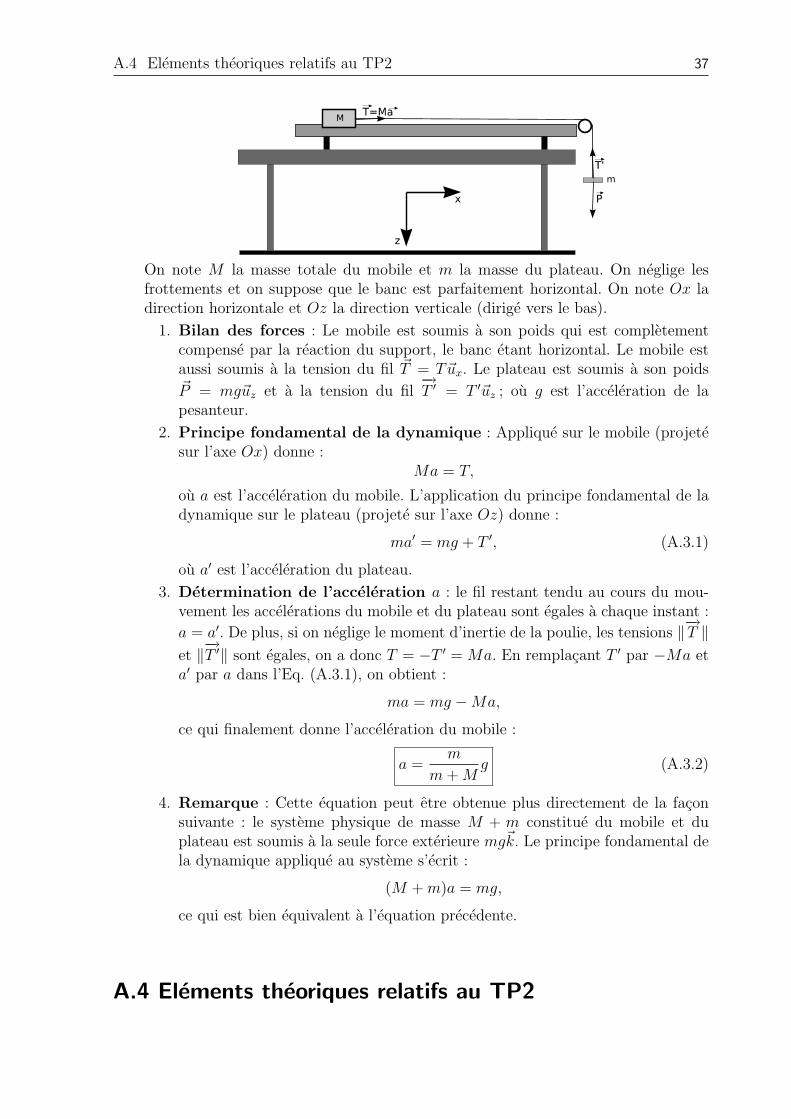
On note M la masse totale du mobile et m la masse du plateau. On neglige lesfrottements et on suppose que le banc est parfaitement horizontal. On note Ox ladirection horizontale et Oz la direction verticale (dirige vers le bas).
1. Bilan des forces : Le mobile est soumis a son poids qui est completementcompense par la reaction du support, le banc etant horizontal. Le mobile estaussi soumis a la tension du fil ~T = T~ux. Le plateau est soumis a son poids~P = mg~uz et a la tension du fil
−→T ′ = T ′~uz ; ou g est l’acceleration de la
pesanteur.
2. Principe fondamental de la dynamique : Applique sur le mobile (projetesur l’axe Ox) donne :
Ma = T,
ou a est l’acceleration du mobile. L’application du principe fondamental de ladynamique sur le plateau (projete sur l’axe Oz) donne :
ma′ = mg + T ′, (A.3.1)
ou a′ est l’acceleration du plateau.
3. Determination de l’acceleration a : le fil restant tendu au cours du mou-vement les accelerations du mobile et du plateau sont egales a chaque instant :
a = a′. De plus, si on neglige le moment d’inertie de la poulie, les tensions ‖−→T ‖
et ‖−→T ′‖ sont egales, on a donc T = −T ′ = Ma. En remplacant T ′ par −Ma et
a′ par a dans l’Eq. (A.3.1), on obtient :
ma = mg −Ma,
ce qui finalement donne l’acceleration du mobile :
a =m
m+Mg (A.3.2)
4. Remarque : Cette equation peut etre obtenue plus directement de la faconsuivante : le systeme physique de masse M + m constitue du mobile et duplateau est soumis a la seule force exterieure mg~k. Le principe fondamental dela dynamique applique au systeme s’ecrit :
(M +m)a = mg,
ce qui est bien equivalent a l’equation precedente.
A.4 Elements theoriques relatifs au TP2

38 Documents
Document A.4.1 Quantite de mouvement–definitions et proprietesOn rappelle ici la definition et les proprietes de la quantite de mouvement .
1. Definition : La quantite de mouvement ~p d’un point materiel de masse manime d’une vitesse ~v est definie par :
~p = m~v.
2. Quantite de mouvement d’un systeme de points materiels : La quantitede mouvement d’un systeme de N points materiels Mi de masse mi et animes devitesses ~vi (i = 1, 2, · · ·N) est definie par la somme des quantites de mouvementde chacun des points materiels :
~p =N∑i=1
mi~vi.
3. Quantite de mouvement du centre de masse d’un systeme de pointsmateriels : La position du centre de masse G d’un systeme de N points mate-
riels Mi de masse mi, reperes par leurs vecteurs positions−−→OM i (i = 1, 2, · · ·N)
est definie par :
M−→OG =
N∑i=1
mi−−→OM i,
ou M est la masse totale du systeme de N points materiels : M =∑N
i=1mi.En derivant par rapport au temps cette equation on obtient :
M~vG =N∑i=1
mi~vi =N∑i=1
~pi,
ou ~vG = d−−→OGdt
est la vitesse du centre de masse. On obtient donc le resultantimportant suivant :
La somme des quantites de mouvement d’un systeme de points mate-riels est la quantite de mouvement de son centre de masse, affectee dela masse totale du systeme.
Un solide etant considere comme un ensemble de points materiels, la quantitede mouvement totale d’un solide sera la quantite de mouvement de son centrede masse.
Document A.4.2 Conservation de la quantite de mouvementLe principe fondamental de la dynamique donne la variation de la quantite de mou-vement d’un systeme de points materiels soumis a des forces exterieures au systeme(i.e des forces qui ne sont pas des forces d’interactions entre les points materiels) :
d
dt
N∑i=1
~pi =N∑i=1
~F exti ,
A.4 Elements theoriques relatifs au TP2 39
ou ~pi est la quantite de mouvement du point i et ~F exti est la force exterieure s’ap-
pliquant sur point materiel Mi.Si la resultante des forces exterieures est nulle (
∑Ni=1
~F exti = 0), on obtient le resultat
fondamental suivant :
La quantite de mouvement d’un systeme isole (ou pseudo–isole) est unequantite qui se conserve au cours du temps.
Au cours d’un choc de deux solides, le systeme constitue des deux solides pouvantetre considere comme un systeme isole, on aura ~p1 + ~p2 qui est conserve au cours dutemps. Ou ~p1 et ~p2 sont les quantites de mouvement des centres de masse de chacundes solides.
Document A.4.3 Types de collisions
On distingue deux type de collisions• Le choc elastique : Le choc entre deux mobiles est dit elastique lorsque les masses
de chacun des mobiles restent les meme avant et apres le choc et lorsque l’energiecinetique totale initiale du systeme constitue des deux mobiles est entierementrestituee au systeme apres le choc.Lors d’un choc elastique, en plus de la conservation de la quantite de mouvement,l’energie cinetique totale apres le choc sera egale a l’energie cinetique initiale totaledu systeme.
Lors d’un choc elastique on aura a notre disposition deux lois de conser-vation :
~p1 + ~p2 = ~p′1 + ~p′2Ec1 + Ec2 = E ′c1 + E ′c2
Ou ~p1, ~p2 designent les quantites de mouvement respectives des mobiles avant lechoc. Ec1, Ec2 sont les energies cinetiques respectives avant le choc. Les quantitesprimees representent des quantites apres le choc.• Le choc inelastique : Le choc entre deux mobiles est dit inelastique si les conditions
precedentes ne sont pas remplis. C’est le cas lorsqu’il y a un transfert d’unepartie de l’energie cinetique initiale en une autre forme d’energie : chaleur parfrottements, deformation de l’un des mobiles ou echange de matiere entre lesmobiles par exemples. Le choc mou, dans lequel les deux mobiles restent accrochesl’un a l’autre apres la collision, est un cas particulier de choc inelastique.
Document A.4.4 Choc elastique – Transfert d’energie cinetique
On considere un mobile de masse m1 anime d’une vitesse ~v1 = v1~ux qui entre encollision avec un mobile de masse m2 initialement au repos. On suppose que lemouvements des mobiles a lieu sur un rail sans frottement. Le mouvement a donc

40 Documents
lieu sur une droite que l’on notera Ox. Le but de cette section est de determinerl’energie cinetique apres le choc E ′c2 du mobile de masse m2 en fonction de l’energiecinetique initiale du mobile de masse m1.Le choc etant elastique nous avons a notre disposition deux lois de conservation : laconservation de l’energie cinetique :
Ec1 = E ′c1 + E ′c2 ⇔p2
1
2m1
=p′21
2m1
+p′22
2m2
et la conservation de la quantite de mouvement (projetee sur l’axe Ox) :
p1 = p′1 + p′2, (A.4.1)
ou les notations sont les meme que dans la section precedente et on a tenu comptedu fait que le mobile de masse m2 est initialement au repos : p2 = 0, Ec2 = 0.Ces deux equations peuvent s’ecrire de la facon suivante :
p21 − p′21 =
m1
m2
p′22
p1 − p′1 = p′2,
puis en utilisant l’identite p21 − p′21 = (p1 − p′1)(p1 + p′1) et en faisant le rapport des
deux equations, on obtient :
p1 + p′1 =m1
m2
p′2.
En utilisant l’equation A.4.1 pour exprimer p′1 en fonction de p1 et p′2, on obtient :
2p1 − p′2 =m1
m2
p′2 ⇔ p′2 =2m2
m1 +m2
p1.
Le taux de transfert de quantite de mouvement est donc donne par :
p′2p1
= 2
(1 +
m1
m2
)−1
Le rapport R =E′
c2
Ec1caracterisant le taux de transfert de l’energie cinetique est donc
donne par :
R =E ′c2Ec1
=p′22
2m2
(p2
1
2m1
)−1
=m1
m2
(p′2p1
)2
,
ce qui finalement donne :
R = 4m1
m2
(1 +
m1
m2
)−2
On remarque que R ne depend que du rapport des masses des mobiles m1
m2.
A.5 Elements theoriques relatifs au TP3

A.5 Elements theoriques relatifs au TP3 41
Document A.5.1 Modelisation du Pendule simple
TP :Pendule : modelisation
L’objectif de cette section est de determiner la periode T du pendule simple.
1. pendule simple : Le pendule simple est un modele qui consiste en une massem ponctuelle accrochee a une tige de longueur ` et de masse negligeable. L’autreextremite de la tige, situee au point O, est accrochee a un axe horizontal, detelle sorte que la tige puisse tourner, sans frottement, dans un plan vertical. Laposition de la masse m est reperee a chaque instant par son vecteur position−−→OM .
2. Bilan des forces : La masse m est soumise a son poids ~p = m~g et a la force deliaison avec la tige ~T . La trajectoire de la masse m etant un arc de cercle, nousallons utiliser les coordonnees polaires pour reperer sa position. Dans la baselocale (~uρ, ~uθ) associees aux coordonnees polaires les vecteurs forces s’exprimentde la facon suivante :
~T = T~uρ; ~p = mg(cos θ~uρ − sin θ~uθ), (A.5.1)
ou θ est l’angle que fait la tige avec la verticale, a chaque instant t.
3. Principe fondamental de la dynamique : Le but est d’ecrire
~p+ ~T = m~a, (A.5.2)
dans la base locale (~uρ, ~uθ), pour obtenir l’equation differentielle satisfaite parθ(t). Pour cela calculons les composantes de l’acceleration ~a dans cette base.Le vecteur position est donne a chaque instant t par :
−−→OM = `~uρ.
En derivant cette equation par rapport au temps on obtient le vecteur vitesse :
~v ≡ d
dt
−−→OM = `
dθ
dt~uθ.
En derivant une nouvelle fois on obtient l’acceleration :
~a ≡ d2
dt2−−→OM = −`
(dθ
dt
)2
~uρ + `d2θ
dt2~uθ. (A.5.3)

42 Documents
En utilisant l’equation A.5.1 et l’equation A.5.3 dans le principe fondamentalde la dynamique A.5.2, et en projetant sur ~uθ on obtient :
d2θ
dt2+g
`sin θ = 0. (A.5.4)
C’est une equation differentielle du second ordre et non lineaire (a cause duterme sin θ). C’est cette equation que doit satisfaire la fonction θ(t). On l’ap-pelle : equation differentielle du mouvement.
4. Approximation des petits angles : Pour de petits angles d’oscillation, onpeut faire l’approximation
sin θ ' θ,
et l’equation differentielle du mouvement Eq. (A.5.4) devient :
d2θ
dt2+g
`θ = 0. (A.5.5)
C’est l’equation d’un oscillateur harmonique de pulsation ω =√
g`. On en
deduit que :
Pour de faibles amplitudes des oscillations, la periode T0 du penduleest donnee par :
T0 = 2π
√`
g(A.5.6)
5. Ecart a l’approximation des petits angles : Il faut bien faire attention etse rappeler que l’expression A.5.6 donnant T0 n’est valable que pour de faiblesangles. Quand l’amplitude des oscillations devient plus grande, la periode dupendule devient une fonction de l’amplitude des oscillations. On peut calculerles corrections a l’approximation des petits angles, la periode du pendule peuts’ecrire sous la forme d’une serie.
La periode T du pendule depend en general de l’amplitude des oscilla-tions θ0. T peut s’ecrire sous la forme d’une serie :
T = T0
1 +
(1
2
)2
sin2
(θ0
2
)+
(1× 3
2× 4
)2
sin4
(θ0
2
)
+
(1× 3× 5
2× 4× 6
)2
sin6
(θ0
2
)+ · · ·
(A.5.7)
La periode T1 du pendule compte tenu de la premiere correction a l’approxi-mation des petits angles, pour la periode du pendule est donc :
T1 = T0
(1 +
θ20
16
)(A.5.8)
A.5 Elements theoriques relatifs au TP3 43
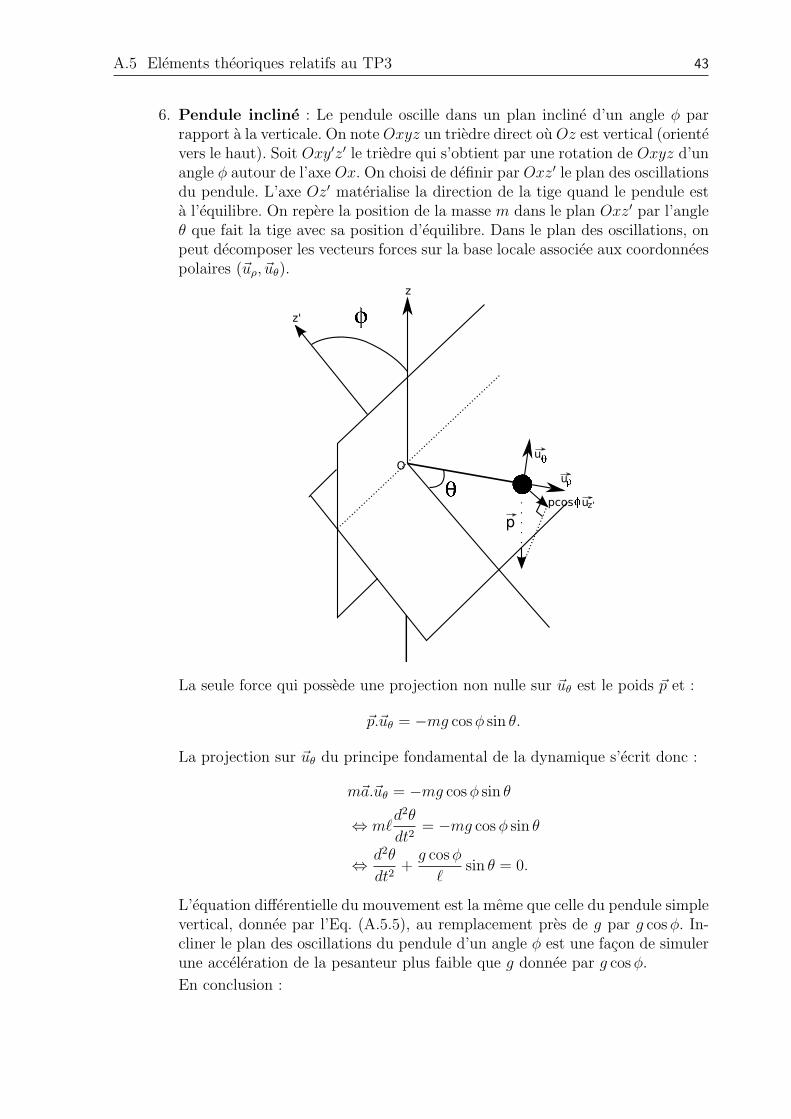
6. Pendule incline : Le pendule oscille dans un plan incline d’un angle φ parrapport a la verticale. On note Oxyz un triedre direct ou Oz est vertical (orientevers le haut). Soit Oxy′z′ le triedre qui s’obtient par une rotation de Oxyz d’unangle φ autour de l’axe Ox. On choisi de definir par Oxz′ le plan des oscillationsdu pendule. L’axe Oz′ materialise la direction de la tige quand le pendule esta l’equilibre. On repere la position de la masse m dans le plan Oxz′ par l’angleθ que fait la tige avec sa position d’equilibre. Dans le plan des oscillations, onpeut decomposer les vecteurs forces sur la base locale associee aux coordonneespolaires (~uρ, ~uθ).
La seule force qui possede une projection non nulle sur ~uθ est le poids ~p et :
~p.~uθ = −mg cosφ sin θ.
La projection sur ~uθ du principe fondamental de la dynamique s’ecrit donc :
m~a.~uθ = −mg cosφ sin θ
⇔ m`d2θ
dt2= −mg cosφ sin θ
⇔ d2θ
dt2+g cosφ
`sin θ = 0.
L’equation differentielle du mouvement est la meme que celle du pendule simplevertical, donnee par l’Eq. (A.5.5), au remplacement pres de g par g cosφ. In-cliner le plan des oscillations du pendule d’un angle φ est une facon de simulerune acceleration de la pesanteur plus faible que g donnee par g cosφ.
En conclusion :
44 Documents
L’equation differentielle du mouvement d’un pendule dont le plan desoscillations est incline d’un angle φ par rapport a la verticale, est lameme que celle du pendule simple, au changement pres de g par g cosφ :
d2θ
dt2+g cosφ
`sin θ = 0. (A.5.9)
Dans la limite des petites oscillations, la periode T0(φ) du pendule in-cline est donc donnee par
T0(φ) = 2π
√`
g cosφ. (A.5.10)
A.6 Elements theoriques relatifs au TP4
Document A.6.1 Chariot sur plateforme tournanteTP :Plateforme en rotation TP4
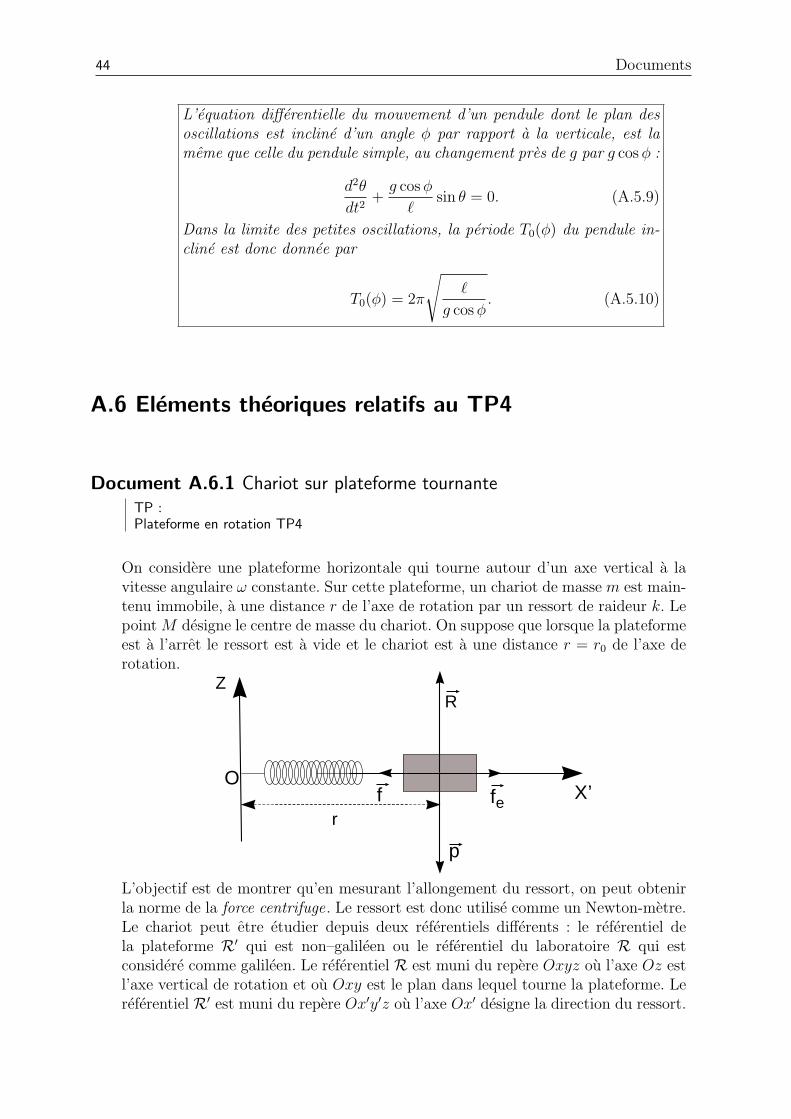
On considere une plateforme horizontale qui tourne autour d’un axe vertical a lavitesse angulaire ω constante. Sur cette plateforme, un chariot de masse m est main-tenu immobile, a une distance r de l’axe de rotation par un ressort de raideur k. Lepoint M designe le centre de masse du chariot. On suppose que lorsque la plateformeest a l’arret le ressort est a vide et le chariot est a une distance r = r0 de l’axe derotation.
O
Z
X’
R
fe
p
fr
L’objectif est de montrer qu’en mesurant l’allongement du ressort, on peut obtenirla norme de la force centrifuge. Le ressort est donc utilise comme un Newton-metre.Le chariot peut etre etudier depuis deux referentiels differents : le referentiel dela plateforme R′ qui est non–galileen ou le referentiel du laboratoire R qui estconsidere comme galileen. Le referentiel R est muni du repere Oxyz ou l’axe Oz estl’axe vertical de rotation et ou Oxy est le plan dans lequel tourne la plateforme. Lereferentiel R′ est muni du repere Ox′y′z ou l’axe Ox′ designe la direction du ressort.

A.6 Elements theoriques relatifs au TP4 45
1. Dans le referentiel du laboratoire R : Lorsque le chariot est immobilepar rapport a la plateforme, son mouvement dans le referentiel du laboratoireest connu : c’est un mouvement circulaire et uniforme (norme de la vitesseconstante) a la vitesse angulaire ω. Il est avantageux de reperer le chariot parses coordonnees polaires (ρ, θ) et d’exprimer les vecteurs (position, vitesse etacceleration) par leurs composantes dans la base locale (~uρ, ~uθ) associee a cescoordonnees.
(a) Determination de l’acceleration : En partant du vecteur position−−→OM(t)
et en derivant deux fois par rapport au temps on obtient l’acceleration :
−−→OM = r~uρ ⇔ ~v ≡ d
dt
−−→OM = r
dθ
dt~uθ
⇔ ~a ≡ d2
dt2−−→OM = −r
(dθ
dt
)2
~uρ = −rω2~uρ,
ou on a explicitement utilise le fait que le chariot est immobile par rapporta R′ ce qui implique que dr
dt= 0 et que le mouvement circulaire de la
plateforme est uniforme : d2θd2
= dωdt
= 0. L’acceleration a la meme directionque ~uρ mais elle est de sens oppose. Elle est dirigee vers l’axe de rotation,on dit que l’acceleration est centripete.
(b) Bilan des force : Le chariot est soumis a son poids ~p et a la reaction du
support ~R qui compense completement ce dernier : ~p + ~R = ~0. Le chariotest aussi soumis a la force de rappel du ressort ~f :
~f = −k(r − r0)~uρ. (A.6.1)
(c) Principe fondamental de la dynamique : Le referentiel R etant gali-leen on peut appliquer le principe fondamental de la dynamique :
~p+ ~R + ~f = m~a⇒ ‖−→f ‖ = mrω2. (A.6.2)
En utilisant l’expression de ~f donne par l’Eq. (A.6.1), on obtient
k(r − r0) = mrω2. (A.6.3)
Si on connaıt la raideur du ressort k, en mesurant l’allongement du res-sort, on obtient mrω2 qui s’interprete ici comme l’acceleration du chariotmesuree dans R.
2. Dans le referentiel de la plateforme R′ :
(a) Bilan des forces et pseudo–forces : Dans le referentiel R′ lie a la pla-teforme, le chariot est soumis a son poids qui est completement compensepar la reaction du support. Le ressort exerce la force ~f = −k(x− x0)~i′. Lereferentiel R′ dans lequel on etudie l’equilibre du chariot n’etant pas gali-leen, il faut tenir compte des forces d’inertie (appelees aussi pseudo-forces).Le chariot etant immobile dans R′ il n’est pas soumis a la pseudo–force deCoriolis, il est neanmoins soumis a la force d’entraınement centrifuge :
~fe = −m~ω ∧(~ω ∧−−→OM
)= mω2r~i′.
46 Documents
(b) Condition d’equilibre : Dans le referentiel non galileen de la plateformela condition d’equilibre est :
~p+ ~R + ~f + ~fe = ~0,
qui projetee sur l’axe Ox′ nous donne :
‖−→f ‖ = ‖
−→fe‖ = mω2r.
La norme de la force exercee par le ressort est bien egale a la norme de laforce centrifuge. En mesurant l’allongement r− r0 du ressort on peut donc
mesurer la force centrifuge. En effet, en remplacant ‖−→f ‖ par son expression
on obtient :k(r − r0) = mω2r.
L’etalonnage du Newton–metre effectue au debut de la seance du TP4, estequivalent a une mesure de k. Si on connaıt k, en mesurant l’allongementdu ressort on obtient la force centrifuge.
Document A.6.2 Le pendule de Foucault
TP :Pendule de Foucault (TP4)
1. Introduction : La premiere demonstration publique date de 1851. Le penduleetait accroche a la voute du Pantheon de Paris. Le pendule etait constitued’une masse de 28 kg accrochee a un fil d’acier de 67 metres. Depuis, cetteexperience a ete realisee de nombreuses fois dans divers endroits. Aujourd’huion peut visiter facilement le pendule de Foucault installe au Musee des Arts etMetiers a Paris.
L’experience met en evidence que le plan des oscillations du pendule est enrotation, autour de la verticale, dans le sens horaire dans l’hemisphere nord etdans le sens inverse dans l’hemisphere sud.
Cette rotation du plan d’oscillation du pendule peut s’expliquer par le faitque la Terre n’est pas un referentiel galileen car elle tourne sur elle meme.L’experience du pendule de Foucault est donc une demonstration locale de larotation de la Terre.
On montre que le temps T que met le plan d’oscillation pour revenir a saposition initiale est donnee par l’expression suivante :
T =T0
sinλ(A.6.4)
ou λ est la latitude du lieu et T0 est le temps que met la Terre a faire un toursur elle meme. T0 est appele le jour sideral et T0 = 23 h 56 mn 4 s ou encoreT0 = 86164 s.
A.6 Elements theoriques relatifs au TP4 47
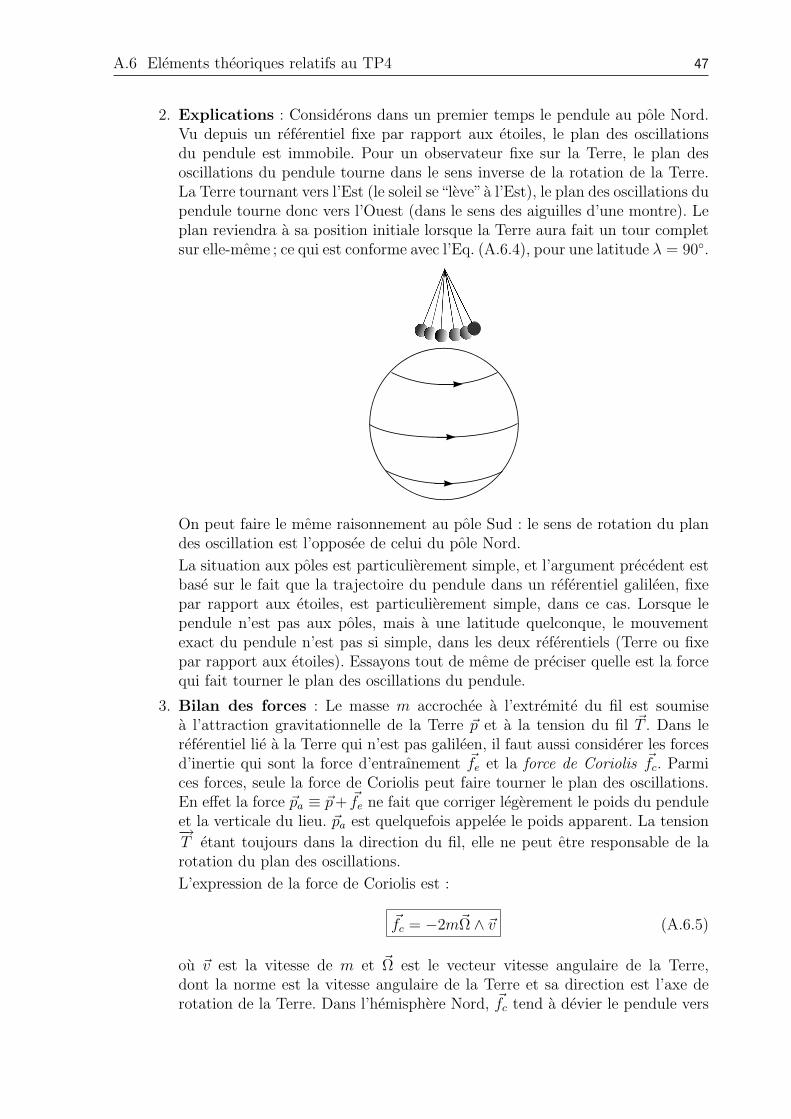
2. Explications : Considerons dans un premier temps le pendule au pole Nord.Vu depuis un referentiel fixe par rapport aux etoiles, le plan des oscillationsdu pendule est immobile. Pour un observateur fixe sur la Terre, le plan desoscillations du pendule tourne dans le sens inverse de la rotation de la Terre.La Terre tournant vers l’Est (le soleil se“leve”a l’Est), le plan des oscillations dupendule tourne donc vers l’Ouest (dans le sens des aiguilles d’une montre). Leplan reviendra a sa position initiale lorsque la Terre aura fait un tour completsur elle-meme ; ce qui est conforme avec l’Eq. (A.6.4), pour une latitude λ = 90.
On peut faire le meme raisonnement au pole Sud : le sens de rotation du plandes oscillation est l’opposee de celui du pole Nord.
La situation aux poles est particulierement simple, et l’argument precedent estbase sur le fait que la trajectoire du pendule dans un referentiel galileen, fixepar rapport aux etoiles, est particulierement simple, dans ce cas. Lorsque lependule n’est pas aux poles, mais a une latitude quelconque, le mouvementexact du pendule n’est pas si simple, dans les deux referentiels (Terre ou fixepar rapport aux etoiles). Essayons tout de meme de preciser quelle est la forcequi fait tourner le plan des oscillations du pendule.
3. Bilan des forces : Le masse m accrochee a l’extremite du fil est soumisea l’attraction gravitationnelle de la Terre ~p et a la tension du fil ~T . Dans lereferentiel lie a la Terre qui n’est pas galileen, il faut aussi considerer les forcesd’inertie qui sont la force d’entraınement ~fe et la force de Coriolis ~fc. Parmices forces, seule la force de Coriolis peut faire tourner le plan des oscillations.En effet la force ~pa ≡ ~p+ ~fe ne fait que corriger legerement le poids du penduleet la verticale du lieu. ~pa est quelquefois appelee le poids apparent. La tension−→T etant toujours dans la direction du fil, elle ne peut etre responsable de larotation du plan des oscillations.
L’expression de la force de Coriolis est :
~fc = −2m~Ω ∧ ~v (A.6.5)
ou ~v est la vitesse de m et ~Ω est le vecteur vitesse angulaire de la Terre,dont la norme est la vitesse angulaire de la Terre et sa direction est l’axe derotation de la Terre. Dans l’hemisphere Nord, ~fc tend a devier le pendule vers

48 Documents
sa droite, c’est cette force qui va faire tourner lentement le plan des oscillationsdu pendule dans le sens des aiguilles d’une montre.
4. Remarque : Considerons le pendule de Foucault vu d’un referentiel galileen,fice par rapport aux etoies. Si le pendule n’est pas situes aux pole, alors le plandes oscillations n’est pas fixe non plus dans ce referentiel. En effet comme lefait remarquer Norman Phillips (Norman Phillips, La Meteorologie - nr 34 -aout 2001. http ://www.smf.asso.fr/Ressources/Phillips34.pdf) :
“Considerons l’exemple du pendule du Pantheon. Le sinus de la latitude de Pa-ris est proche de 0.75 et, d’apres la formule de Foucault (Eq. (A.6.4)), 32 heuressiderales sont necessaires pour une rotation complete (mesure dans le referen-tiel fixe par rapport a la Terre). Ainsi, le plan des oscillations a tourne de troisquarts de tour au bout de 24 heures et il est donc oriente perpendiculairementa sa position initiale dans le Pantheon (mesure dans le referentiel fixe par rap-port a la Terre). Mais comme le Pantheon a retrouve la meme orientation parrapport aux etoiles que 24 heures siderales plus tot, le plan des oscillations estaussi perpendiculaire a celui des oscillations initiales quand on le regarde (de-puis un referentiel fixe par rapport aux etoiles). En depit de cette explicationdirecte, qui merite le nom d’observation, il est encore courant de trouver desmusees et leurs sites Web ou l’on soutient que la trajectoire du pendule est fixedans l’espace.”
Document A.6.3 Principe d’equivalenceLa genese de la relativite generale repose sur une idee simple et ancestrale (quiremonte a Galilee et Newton), liee au principe d’inertie : tous les referentiels doiventetre equivalents pour la formulation generale des lois de la nature.
1. Position du probleme : La question posee par Einstein repose sur un constattres simple que l’on peut exprimer sous differentes formes :• Tous les referentiels ne sont pas equivalents pour la formulation generale des
lois de la nature.• Dans un referentiel accelere (dit non-galileen ), le principe d’inertie n’est pas
valable.• Dans un referentiel non-galileen, le Principe Fondamental de la Dynamique
(PFD) n’est pas valable : il faut rajouter les pseudo-forces (entrainement,centrifuge, Coriolis) au bilan des forces, pour decrire les memes phenomenesque dans un referentiel galileen.
Un mouvement accelere est donc absolu : le voyageur dans un wagon est capablede determiner si c’est le wagon qui freine dans un paysage immobile, ou sic’est le paysage qui accelere autour d’un wagon immobile. Dans le premier casseulement, il subira une pseudo-force d’entrainement qui va l’ecarter de sonsiege. Cette non-universalite des lois de la nature, et le caractere absolu de cesmouvements sont difficilement acceptables. La relativite generale permet d’yremedier.
Newton avait deja remarque le caractere absolu de ces mouvements acceleresavec l’experience du sceau rempli d’eau, qui tourne sur lui-meme : la surfacede l’eau prend une forme parabolique. Si, au contraire, le reste de l’Univers
A.6 Elements theoriques relatifs au TP4 49
tournait par rapport au sceau immobile, la surface de l’eau resterait plane,d’apres Newton.
Il est cependant impossible de realiser cette derniere experience. Ernst Mach(1872) prit le parti inverse et postulat que la surface de l’eau prendrait aussiune forme parabolique si le sceau etait immobile, mais que le reste de l’Universtournait autour de lui. Grace au principe de Mach, l’acceleration redevenaitun mouvement relatif. Ce principe, impossible a verifier experimentalement,n’a pas de consequence sur les observables physiques. Il est donc tombe endesuetude, mais il inspira Einstein et son principe de relativite generale.
2. Le cas de la rotation : Dans le TP4 sur la rotation, on considere deuxreferentiels : celui, galileen, de la salle de TP, et celui, non-galileen, de la plate-forme en rotation. On etudie les forces subies par le chariot dans ces deuxreferentiels. La pseudo-force est ici la force centrifuge.• Vu du referentiel galileen de la salle de TP, le chariot est en mouvement
circulaire uniforme (il est entraine par les rails de la plate-forme et retenupar le fil). Le PFD s’ecrit :
~f = m~a = −mrω2~uρ
ou ~f est la tension du fil.• Vu du referentiel non-galileen de la plate-forme, le chariot, a l’equilibre, subit
la pseudo-force centrifuge et la tension ~f du fil. Le PFD s’ecrit :
~f + ~fe = 0→ ~fe = mrω2~uρ
Comment prouver que c’est la Terre qui tourne sur elle-meme et nonl’Univers qui tourne autour de la Terre ? Dans le cas de la rotation de la Terresur elle-meme, un observateur a la surface de celle-ci subit une acceleration cen-trifuge (dans le referentiel de la Terre) : rω2 ' 3,4.10−2 N ' g/300. Cette forcecentrifuge due a la rotation de la Terre n’a aucun lien direct avec l’attractiongravitationnelle du noyau terrestre. Un pendule s’ecarte tres legerement de laverticale sous l’effet de cette force centrifuge (cf p. 100 de L’Univers Mecanique-L. Valentin). Cet effet est difficile a detecter, c’est pourquoi il a fallu attendrele pendule de Foucault pour mettre en evidence la rotation absolue de laTerre sur elle-meme a l’aide de la pseudo-force de Coriolis. Ainsi les pseudosforces sont la preuve que l’on est dans un referentiel non Galileen, c’est a direque l’on subit une certaine acceleration. L’existence d’une pseudo force rendl’acceleration absolue.
3. Le principe d’equivalence : Le principe d’equivalence permet de conside-rer une pseudo force comme une force gravitationnelle. Par exemple, la forcecentrifuge subie par le chariot de masse m peut etre simulee par une force gra-vitationnelle generee par une masse M situee a une distance D du chariot, telleque :
mω2r =mMG
D2
En simplifiant par m a gauche (masse inerte) et a droite (masse pesante) onobtient :
M =ω2rD2
G

50 Documents
M est independante de l’etat physique du chariot (masse, charge,...), ce quipermet d’introduire le principe d’equivalence : grace a l’egalite de la masseinerte (PFD) et de la masse pesante (gravitation), il est toujours possible deremplacer une pseudo-force par une force de gravitation (et vice-versa). Vu dela plate-forme, le chariot est donc comme attire vers l’exterieur par une massede ' 1010 kg. situee a ' 1 m du chariot. Noter que M se situerait a l’exterieurde l’orbite circulaire de la plate-forme, et que ce principe d’equivalence n’estvalable qu’en un point de l’espace donne (principe local).
Ainsi les pseudos forces dues aux mouvement acceleres peuvent toujours seramener a une force de gravitation et inversement. Le chariot qui subit uneforce centrifuge peut etre considere comme libre mais plonge dans un champde gravitation qui l’attire vers l’exterieur. Du point de vue du chariot il estimpossible de faire la distinction !
Enfin la theorie de la relativite generale montre que la gravitation deformel’espace : un mouvement du a la graviation (ou a une pseudo force) est unmouvement libre dans un espace deforme ce qui permet de rendre tous lesreferentiels equivalents pour la formulation generale des lois de la nature. Dansle cadre de cette theorie le referentiel de la plate forme tournante est doncequivalent a celui de la salle de TP pour decrire les phenomenes physiquessubis par le chariot.
A.7 Elements theoriques relatifs au TP5
Document A.7.1 Elements de mecanique du solideLe but de cette section est de donner quelques definitions et proprietes relatives ala dynamique d’un solide en rotation. Ces notions seront abordees dans le detail encours.
1. Couple : Soit ~F une force s’appliquant en un point M , on note−→M =
−−→OM ∧ ~F ,
le moment de ~F par rapport au point O situe sur un axe Oz. Le couple Γ
qu’exerce la force ~F par rapport a l’axe Oz designe la projection de−→M sur
l’axe :Γ =−→M.~k (A.7.1)
2. Theoreme du moment cinetique : Soit un solide tournant autour d’un point
O, fixe dans un referentiel galileen. On note−→M le moment par rapport a O
de la resultante des forces s’exercant sur le solide et ~L le moment cinetique dusolide par rapport a O. Le theoreme du moment cinetique s’ecrit :
d
dt~L =−→M. (A.7.2)
De la meme facon qu’une force fait varier la quantite de mouvement (prin-cipe fondamental de la dynamique), un moment de force fait varier le momentcinetique.

A.7 Elements theoriques relatifs au TP5 51
3. Moment d’inertie : Le moment d’inertie I par rapport a un axe, d’un en-semble de N masses ponctuelles mi (i = 1, 2, · · · , N) est defini par la relation :
I =N∑i=1
mir2i ,
ou ri est la distance de la masse mi a l’axe.
Le moment d’inertie par rapport a un axe Oz, d’un solide de densite de massepar unite de volume ρ(x, y, z), est donne par l’integrale, sur le volume du solide,suivante :
I =
∫solide
ρ(x, y, z)(x2 + y2)dxdydz.
Le moment d’inertie caracterise la repartition geometrique de la masse autourde l’axe. Pour une masse ponctuelle m situee a une distance r de l’axe, lemoment d’inertie est I = mr2. I augmente donc assez rapidement quand raugmente.
Soit deux solides S1 et S2 et soit I1 et I2 leurs moments d’inertie respectifspar rapport au meme axe. Le moment d’inertie par rapport a l’axe du systemeconstitue des deux solides est
I = I1 + I2. (A.7.3)
4. Moment cinetique et vitesse angulaire : Considerons un solide tournant ala vitesse angulaire Ω, autour d’un axe Oz fixe. Soit ~L le moment cinetique dusolide par rapport au point O (O est situe sur l’axe de rotation). On montre
que la projection ~L.~k = Lz du moment cinetique ~L sur l’axe de rotation estdonne par :
Lz = IΩ, (A.7.4)
ou I est le moment d’inertie par rapport a l’axe de rotation.
Document A.7.2 Oscillations de torsion d’un solideTP :Mesure du moment d’inertie : dispositifexperimental
Le but du TP est de determiner le moment d’inertie I de differents solides parrapport a un axe, en mesurant la periode T des oscillations de torsion du solideautour de l’axe qui sera note Oz. Nous avons donc besoin d’une relation entre laperiode d’oscillation T et le moment d’inertie I du solide.Considerons le solide effectuant un mouvement d’oscillation de torsion autour del’axe Oz. La position du solide a l’instant t est reperee par l’angle θ(t) de rotationpar rapport a la position d’equilibre. A chaque instant t, il est soumis au couplede rappel du ressort a spirale. On suppose que le couple de rappel Γ du ressort estproportionnel a l’angle de torsion θ. Le couple est la projection sur l’axe de rotationdu moment de la force de rappel (voir Eq. (A.7.1)), on a donc :
Γ =−→M.~k = −Dθ, (A.7.5)

52 Documents
ou D est la constante de torsion qui est caracteristique du ressort spiral. L’unite deD est le Newton × metre (N.m.). En vertu de l’Eq. (A.7.4), la projection sur l’axe
de rotation du moment cinetique ~L du solide est :
~L.~k = Iθ.
En derivant par rapport au temps cette equation par rapport au temps on obtient :
d~L
dt.~k = Iθ.
On transforme le membre de gauche de cette egalite en utilisant le theoreme dumoment cinetique (voir Eq. (A.7.2). Ce qui donne :
−→M.~k = Iθ.
Dans le membre de gauche, on reconnaıt le couple Γ = −Dθ (voir l’Eq. (A.7.5)), onobtient donc :
θ +D
Iθ = 0
C’est l’equation differentielle d’un oscillateur harmonique de pulsation ω =√
DI
. On
en deduit :
la periode T des oscillations de torsion d’un solide autour d’un axe fixe, estdonnee par :
T = 2π
√I
D, (A.7.6)
ou I est le moment d’inertie du solide par rapport a l’axe de rotation etD est la constante de rappel de torsion. Si on connaıt D, la mesure de laperiode T permet d’obtenir le moment d’inertie I.

A.7 Elements theoriques relatifs au TP5 53

Index des TP
BBanc a coussin d’air . . . . . . . . . . . . . . . . . . . . .7
CChocs a une dimension : Modelisation. .14Chocs : dispositif experimental . . . . . . . . .14Chocs : Experimentation . . . . . . . . . . . . . . .15
MMesure du moment d’inertie : dispositif ex-
perimental. . . . . . . . . . . . . . . . . . . . .27,51
Moment d’inertie : experimentation . . . . 28Mouvement rectiligne uniforme : Experimen-
tation . . . . . . . . . . . . . . . . . . . . . . . . . .10Mouvement translation rectiligne : disposi-
tif experimental . . . . . . . . . . . . . . . . 10Mouvement uniformement accelere : dispo-
sitif experimental . . . . . . . . . . . . . . 36Mouvement uniformement accelere : dispo-
sitif experimental . . . . . . . . . . . . . . 11Mouvement uniformement accelere : Expe-
rimentation . . . . . . . . . . . . . . . . . . . . 12Mouvement uniformement varie : modelisa-
tion . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
PPendule de Foucault (TP4) . . . . . . . . . . . 46Pendule de Foucault (TP4) . . . . . . . . . . . . 22
Pendule de Foucault : experimentation . 22Pendule incline : experimentation . . . . . . 20Pendule vertical : experimentation . . . . . 19Pendule : dispositif experimental . . . . . . . 18Pendule : modelisation . . . . . . . . . . . . .18, 41Plateforme en rotation TP4. . . . . . . .23, 44Plateforme tournante TP4 : experimenta-
tion . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
RReferentiel en rotation TP4 : dispositif ex-
perimental . . . . . . . . . . . . . . . . . . . . . 23Remarques importantes . . . . . . . . . . . . . . . . . 8

Index des notions
Aacceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34acceleration centripete . . . . . . . . . . . . . . . . . 45
Ccentre d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . 35choc elastique . . . . . . . . . . . . . . . . . . . . . . . . . . 39choc inelastique . . . . . . . . . . . . . . . . . . . . . . . . 39couple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Fforce centrifuge. . . . . . . . . . . . . . . . . . . . . . . . .44force de Coriolis . . . . . . . . . . . . . . . . . . . . . . . .47
Iincertitude absolue . . . . . . . . . . . . . . . . . . . . . 30incertitude relative . . . . . . . . . . . . . . . . . . . . . 30
Mmoment d’inertie . . . . . . . . . . . . . . . . . . . . . . . 51
Pperiode du pendule . . . . . . . . . . . . . . . . . . . . . 42pendule simple . . . . . . . . . . . . . . . . . . . . . . . . . 41
Qquantite de mouvement (conservation). .39quantite de mouvement (definition). . . . .38
Rreferentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34referentiel galileen . . . . . . . . . . . . . . . . . . . . . . 34repere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Ttheoreme de l’energie cinetique . . . . . . . . . 35theoreme du moment cinetique . . . . . . . . . 50transfert de l’energie cinetique. . . . . . . . . .40travail d’une force . . . . . . . . . . . . . . . . . . . . . . 35
Vvitesse instantanee . . . . . . . . . . . . . . . . . . . . . 34vitesse moyenne . . . . . . . . . . . . . . . . . . . . . . . . 34





























