Embed Size (px)
Citation preview

UE433 Communications numériques
Chapitre 1 - Introduction
Jean-Pierre Barbot
Université Paris Sud 11 / ENS CachanM1-IST
Vendredi 13 mars 2015

1 Chapitre 1 : Introduction et dé�nitions de baseIntroductionHistoriquePrincipe d'une chaîne de transmission numérique
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 2 / 31

Chapitre 1 : Introduction et dé�nitions de base Introduction
Excepté la radio, toutes les communications actuelles sont numériques(TNT, DVB-S, GSM, UMTS, ADSL, ...)
Canaux de transmission : paire torsadée (téléphone), ligne �laire,propagation sans �l, �bre optique, ...
Type de source : analogique (voix) ou numérique (données)
Objectifs
Transmettre le maximum de donnée (débit ↗) avec une �abilité maximale(probabilité d'erreur ↘)avec :
1 des limites théoriques (Shannon),2 des contraintes physiques (propagation),3 des contraintes économiques (énergie, complexité)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 3 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
Historique
XVe siècle
1464 : Création de la Poste Royale par Louis XI
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 4 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
XVIIIe siècle
1792 : Début du télégraphe optique de Claude Chappe
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 5 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
XIXe siècle
1832 : Invention du télégraphe électrique par Samuel Morse
1854 : Projet de téléphone de F. Bourseul
1860 : Lois de l'électromagnétisme par Maxwell
1865 : Création de l'Union internationale du télégraphe (UIT)
1866 : Premier câble télégraphique transatlantique
1876 : Téléphone de Graham Bell & Elisha Gray
1876 : Premiers enregistrements de Thomas Edison
1887 : Ondes radioélectriques de H. Hertz
1892 : Téléphone automatique de d'A. Strowger
1892 : Radiodi�usion par W. Crookes
1896 : Première liaison de "TSF" par G. Marconi
1897 : Émission radio au Panthéon de Paris par Eugène Ducretet
1898 : Camille Tissot établit la première liaison radio opérationnelleFrançaise en mer.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 6 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
Télégraphe de Morse (1837)
Téléphone...
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 7 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
XXe siècle
1901 : Première liaison radio transatlantique1902 : Découverte de l'ionosphère par O. Heaviside1915 : Téléphone automatique Rotary1921 : Premiers "courants porteurs" d'E. Colpits et O. Blackwell1922 : Premières émissions régulières de radiodi�usion de la tour Ei�el1926 : Premier câble à grande distance électronisé1932 : Création de l'Union internationale des télécommunications, UIT1935 : Émissions régulières de télévision depuis la tour Ei�el1936 : Premier télex Creed1938 : Principes de la numérisation par A. Reeves1940 : Création du CCTI, Comité de coordination destélécommunications1941 : Mise au point du radar1943 : Premier calculateur électronique ENIAC de J. Mauchly et J.-P.Eckert1947 : Invention du transistor par J. Bardeen, W. Shockley, W.Brattain
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 8 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
1948 : Shannon fonde la �théorie de l'information�1951 : Premiers faisceaux hertziens1954 : Premiers postes radio à transistor1956 : Câble sous-marin transistorisé1960 : Codes correcteur d'erreur Reed-Solomon (article "PolynomialCodes over Certain Finite Fields." Reed & Solomon, 1960)1960 : Invention des codes correcteur d'erreur BCH (1959 parHocquenghem et 1960 par Bose and Ray-Chaudhuri)1962 : Première liaison Télévision par satellite Amérique-France depuisPleumeur-Bodou1966 : Première liaison numérique MIC1969 E. Berlekamp and J. Massey découvre un algorithme e�cace dedécodage des codes Reed-Solomon.1970 : Fibres optiques de Corning Glass1971 : Premiers microprocesseurs1971 : En France, mise en service du premier autocommutateurélectronique
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 9 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
(1G) : Téléphone �Radiocom-2000�
(2G) Premier téléphone GSM Français (Alcaltel, 1992)
(2G) Téléphone �portable� GSM Français (Alcaltel, 1993) ; 151 x 68 x 40 mm
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 10 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
1973 : Premier appel depuis un téléphone cellulaire (attribué à MartinCooper, direct. R&D motorola)1977 : Lodes RS implémentés dans le programme �Voyager�1982 : Norme �compact disc� audio déposée par Philips, utilisant lescodes RS1982 : Groupe de travail chargé par la CEPT pour la dé�nition de lanorme Européenne GSM1983 : O�cialisation de TCP-IP comme protocole de l'Internet1987 : Ampli�cation optique par dopage à l'Erbium1988 : Mise en service de TAT8, 1er câble transatlantique à �bresoptiques1991 : Première communication expérimentale faite par le groupe GSM1992 : Choix bandes hertziennes 3G IMT-2000 (UMTS)1993 : Découverte des �Turbo-Codes� par C. Berrou et A. Glavieux1995 : Mise en service des câbles transatlantiques TAT12, TAT13 etTPC5 à ampli�cation optique (répéteurs par �bres dopées à l'erbium,EDFA).1999 : ADSL chez les particuliers (France)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 11 / 31

Chapitre 1 : Introduction et dé�nitions de base Historique
XXIe siècle
2000 : Crise boursière a�ectant les valeurs Télécom : éclatement de laBulle Internet
2001 : Accord de l'Union Européenne pour lancer le projet Galileo
2004 : Première o�re commerciale 3G en France
2008 : L'UIT-R établi les spéci�cations � IMT-Advanced (en) �(International Mobile Telecommunications Advanced) pour les normes4G.
2011 : Généralisation de la TNT sur le territoire français (DVB-T).
2013 : Début des émissions de la Radio Numérique Terrestre (DAB+).
2013 : Début de la 4G LTE.
....
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 12 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Principe d'une chaîne de transmission numérique
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 13 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
(S)
emetteur
x ySource
Source d'information ⇔ signal aléatoire
communications num. ⇒informations discrètes.
Informations obtenues :1 échantillonnage + CAN,2 symboles d'une source discrète (les 26 lettres de l'alphabet
alphanumérique).
Etape suivante : le codage source
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 14 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Codage source ⇔ associe à l'information (discrète) de façon bijective unesuite de k éléments binairesCette suite :
doit être décodable !
prend ses valeurs dans l'alphabet binaire {0b, 1b} pour former unsymbole du code {ck},éventuellement de longueur variable,
en moyenne la plus courte possible (pas de redondance)
Mesure de la redondance :
la fonction d'entropie (Shannon 1948),
Réalisations : Code Morse, Alg. d'Hu�man,Etape suivante : le codage canal
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 15 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Codage canal ⇔ lutte contre les e�ets du canal,Pour cela, le codage canal :
introduit de bonnes redondances,
ajoute des bits de redondance à {ck} pour former {dn},n > k donc le rendement du code , k
n< 1
permet éventuellement la correction d'erreur (Codes Reed-Solomon,BCH, ...),
=⇒ résulte d'un compromis {rendement (débit)/pourvoir de correction}Réalisations : Bit de parité, Code de Reed-Solomon (CD, ADSL), BCH,Turbo-codes (1993),...Etape suivante : Codage bande de base + modulation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 16 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Codage Bande de Base : n'est pas un code au sens mot binaire,Le codage en bande de base :
donne une réalité physique au message (tension, énergie),
utilise des formes d'impulsion (rectangulaire, impulsion de Nyquist, ...),
donne au spectre du signal des propriétés �utiles� (bande occupée,présence de raie à la fréquence d'horloge)
Réalisations : RZ, NRZ, Manchester, code de Miller, code HDB3, ...Etape suivante : modulation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 17 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
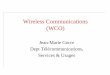
Formes d'impulsion g(t) :1 Impulsion rectangulaire (exemple : sortie de portes logiques, ...),2 Impulsion de Nyquist (exemple : téléphones numériques 3G (UMTS))
g(t)
t0
V
Tb
−6 −4 −2 0 2 4 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tb
Impulsion de Nyquist(alpha = 0.22)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 18 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
transmission en Bande de Base : le signal bande de base est transmissans décalage fréquentiel (ADSL, signal téléphonique RTC)Modulation numérique :
modulation analogique ayant pour modulant un code bande de base,
réalise une transposition fréquentielle du signal B de B,
Réalisations : ASK, OOK, BPSK, QPSK, QAM, FSK, ...Etape suivante : Canal de propagation.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 19 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Modulation numérique :comme pour une modulation analogique
e(t) = A(t)× cos (Φi (t))
avec : A(t) l'amplitude instantanée, Φi (t) la phase instantanée.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 20 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
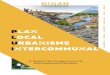
Exemple : cas d'une modulation QPSK (QAM-4)
Possible avec :
A(t) = A = constante
Φi (t) = 2πfpt + φ(t) et φ(t) ∈{0,+π
2 ,−π2 , π
}
où fp est la fréquence de la porteuse, φ(t) peut prendre 4 états de phases.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 21 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
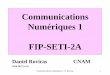
O.L
e(t)
A× cos(2πfpt)
dephas. π2
∑
A× sin(2πfpt)
ak = ±1
bk = ±1
Principe d'un modulateur QPSK
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 22 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Exemple 2 : QAM-16
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 23 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Canal de transmission : canal hertzien, lignes �laires, câble coax., �breoptique, CD,...Caractérisé : par sa réponse impulsionnelle complexe, par sa bandepassante B,Limitations : Capacité (Shannon) C = B. log2
(1 + S
N
)[Bits/seconde]
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 24 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Bruit : présent pendant la transmission (propagation, bruit équipements,brouilleurs)Caractérisé : par sa densité de probabilité, généralement supposé BruitAdditif Blanc Gaussien (BABG)
p(b) =1√2πσ2
b
exp
(−(b − µb)2
2σ2b
)
avec µb la moyenne du bruit et µb = 0 et σ2b la variance du bruit.Limitations dues au bruit : Capacité (Shannon) C = B. log2
(1 + S
N
)
[Bits/seconde]Etape suivante : Démodulation.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 25 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Démodulation : opération inverse à celle de la modulationDémodulation numérique : c'est une démodulation analogique
passage ou non en FI (récepteur super-hétérodyne),
démodulation complexe (passage en voie I et Q),
Etape suivante : Egaliseur-régénérateur
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 26 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
t0 + kT
t0 + kT
A× sin(2πfpt)
A× cos(2πfpt)
r(t)
ak
�ltre adapté à g(t)
�ltre adapté à g(t)
bk
Principe d'un démodulateur QPSK
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 27 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Egaliseur régénérateur : présent pendant la transmission (propagation,bruit équipements, brouilleurs)Utilité : lutte contre les e�ets du canal de transmission pour augmenter ledébit
Capacité (Shannon) C = B. log2(1 + S
N
)[Bits/seconde], C ↗ si B ↗
⇒ �ltrage inverse,
transmission analogique, il s'agit d'un �ltrage inverse (cas deségaliseurs analogiques) D(f ) = H−1(f ),
Attention : transmissions numériques ⇒�ltrage inverse + contraintesliées à la forme d'impulsion du signal numérique (pour éviter l'IES).
Etape suivante : Décodage.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 28 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
Codage B de BCodage
canal
Codage
source Modulation
(M)(Cc)(Cs)
Codage Bruit
Canal
(H)
Demod
(D)
Canal de transmission recepteur
Source
(S)
emetteur
x y
Décodeur : Passage analogique-numérique + décodage canal (correctiond'erreur) + décodage sourceRéalisations :
échantillonnage (càd prise de décision) : �ltrage adapté(Matched-�lter) + sortie dure (hard decision) ou sortie souple (Softdecision),
décodage canal (correction d'erreur), exemple : turbo-décodeurs,déécodeur de Reed-Solomon, ...
décodage source
Fin de la chaîne de réception
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 29 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Harry Nyquist (1889-1976)
Claude Shannon (1916-2001)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 30 / 31

Chapitre 1 : Introduction et dé�nitions de base Principe d'une chaîne de transmission numérique
Irvin Stoy Reed (1923-2012)
Gustave Solomon (1930-1996)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 1) Vendredi 13 mars 2015 31 / 31

UE433 Communications numériquesChapitre 2 - La source de l’information
Jean-Pierre BarbotUniversité Paris Sud 11 / ENS Cachan
M1-IST
Vendredi 13 mars 2015

1 Chapitre 2 : La source de l’informationCodage de données discrètesCodage d’une information analogique MIC (ou PCM)Modulation différentielles DPCM
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 2 / 32

Chapitre 2 : La source de l’information Codage de données discrètes
Messages représentés par des symboles en nombres bornés (m symbolesdistincts).Exemple :
les alphabets (26 lettres ou 26 symboles),les systèmes de numérotation (décimal, octal, . . . ).
On dit qu’on a une représentation m-aires ou à m moments.Ces symboles peuvent être codés par des symboles m-aires inférieur, parexemple codés en binaire :
Sources Symb. Dimensions Codage bin.alpha. simplifié lettres 27-aires 5 éb
alphabet Lettres 128-aires 7 ébNombres Chiffres Déc. : 0-9 10-aires 4 éb (DCB)Nombres Chiffres Hex. : 0-F 16-aires 4 éb (. . .)HNombres Chiffres Ternaire : a,b,c 2 ébNombres Digits Binaire : 0-1 1 éb
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 3 / 32

Chapitre 2 : La source de l’information Codage de données discrètes
Symboles binaires ⇐⇒ digits ou éléments binaires (notés éb) : bits.Coder un alphabet à m = 2n symboles avec des mots binaires à ndigits⇒ il y a m! possibilités.
Exemple : mots de 2 éb (m = 4, n = 2) ⇒ 4! = 24 possibilités.
1 “étiquetage” des symboles en code binaire naturel ou en code Gray .2 signe ⇒ utiliser des codes binaires décalés ou symétriques ou encore
complément à 2 .
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 4 / 32

Chapitre 2 : La source de l’information Codage de données discrètes
Symb. nat. Compl Gray Compl.à2 sym. autre etc
0 A +1 00 11 00 01 11 01 xx1 B +0 01 10 01 00 10 10 xx2 C -0 10 01 11 10 00 01 xx3 D -1 11 00 10 11 01 11 xx
Remarque 1 :5 premiers codes signe,existe des codages plus complexes, exemple mieux adaptés auxordinateurs (EBDIC, ASCII, différents DCB,...),
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 5 / 32

Chapitre 2 : La source de l’information Codage de données discrètes
Remarque 2 :si le nombre de mots binaires possibles est plus grand que le nombrede symboles codés (alphabet simplifiés, DCB. . .)⇒ on dit que lecodage est redondant par rapport aux codages optimaux (Hexa,alphabet 128 signes).Cas redondants ⇒ envisager des codages non-uniformes (mots delongueur différente pour les différents symboles),
diminue la redondance,et augmente le débit binaire (codages sources ou compressions),exemple de mise en oeuvre : algorithme d’Huffman.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 6 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Codage d’une information analogique
Opérations effectuéesOpérations effectuées :
1 échantillonnage temporel du signal analogique (tension),2 quantification sur N niveaux, (pas de quantification uniforme ou non
uniforme),3 codage de chacun des niveaux.
En somme, c’est une conversion Analogique/Numérique classique{échatillonnage+blocage ; CAN}nomée curieusement Modulation par Impulsion et Codage (MIC) ou PulseCoded Modulation en anglais (PCM).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 7 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Première étape : échantillonnage temporelle
t
Te
x(t)
t
x (t)e
L’outil mathématique privilégié pour exploiter l’échantillonnage est ladistribution (impulsion) de Dirac qu’on notera δ(t).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 8 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Distribution de Dirac
Quelques rappels sur δ(t) :
x(t).δ(t) = x(0)x(t) ∗ δ(t) = x(t)
δTe (t) =+∞∑
k=−∞δ(t − k.Te)
F7−→ 1Teδ1/Te (f )
cos(2πf0t))F7−→ 1
2 (δ(f − f0) + δ(f + f0))
où :“∗” est le produit de convolution,δTe (t) est appelé “peigne de Dirac”,
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 9 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
L’échantillonnage idéal d’un signal x(t) à la période période Te :
xei (t) = x(t).δTe (t) (1)
la transformée de Fourier Xei (f ) = F(xei (t)) s’écrit :
Xei (f ) = X (f ) ∗ 1Teδ1/Te (f )
= 1Te
+∞∑
k=−∞X (f − k
Te)
(2)
conséquences de l’échantillonnageLe spectre du signal échantillonné est :
la somme de versions décallées de X (f ),atténuées d’un facteur 1/Te .
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 10 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
δTe
(t)
x(t)x(t)
t
tTe 2Te−Te
fFe−Fe 2Fe0
0 f
δ1/Te
(f)
x(f)Φ
eiΦ(f)
f
.Te
2
−Fe
Fmax
FeFe/2
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 11 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
La densité spectrale de X (f ) 7→ Φxei (f ) :
Φxei (f ) =
( 1Te
)2 +∞∑
k=−∞Φx (f − k
Te).
D’où le théorème d’échantillonnage de Shannon-Nyquist :
Théorème de Shannon-NyquistSoi un signal à spectre de type passe-bas strictement borné par Fmax ,échantillonné à la fréquence Fe .La condition de réversibilité impose :
Fe ≥ 2.Fmax . (3)
Remarque : le signal réel x(t) a forcément un contenu spectral dépassantFmax (Bruits de mesure), ⇒ l’échantilonneur bloqueur doit être précédépar un filtre anti-repliement (ou anti-aliasing en anglais).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 12 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Mise en oeuvre de l’échantillonnagedurée de conversion des CAN ⇒ échantillonneur bloqueur.Modèle de l’échantillonneur bloqueur : rectτ (t) (brève impulsionrectangulaire de largeur τ)
x(t)
t
xei(t)
τ
Xei (f ) s’obtient par :xei (t) = [x(t).δTe (t)] ∗ rectτ (t − τ
2 )
Xei (f ) =[
1Teδ1/Te (f ) ∗ X (f )
].τ sin(πτ f )
πτ f exp (−jπf τ)
=
1
Te
+∞∑
k=−∞X (f − k
Te)
.τ sin(πτ f )
πτ f exp (−jπf τ)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 13 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Remarque : Le spectre d’origine , en plus de la périodisation en fréquence,affecté d’une atténuation complexe en sin(x)/x
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 14 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Conversion analogique numérique
1 phase d’échantillonnage temporel2 coder numériquement l’échantillon analogique. plage de conversion d’amplitude crête-crête V (écrêtage de l’amplitudedu signal) le codage numérique par appartenance à une “plage de tension”.plages de tensions ⇔ plage de conversion V en N plages de
niveaux d’amplitudes ∆i = Vi+1 − Vi
Attention : non nécessairement de taille égale.A chaque plage correspond une tension de seuil de V0 à VN−1généralement au milieu de la plage de conversion.La conversion s’opérera par détection de franchissement de ces seuils.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 15 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Les niveaux quantifiés sont alors :1 numérotés,2 puis codés en binaire (binaire naturel, code de gray, ou autres).
Remarque :conversion simple si N = 2n,composants : Converstisseurs Analogiques-Numérique (CAN ou ADCen anglais pour Analog to Digital Convertors).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 16 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Bruit de quantificationBruit additif de quantification ⇔ erreur de quantification :
eq(t) = x(t)− xq (4)
0110
0101
0100
0011
0010
0001
0000
N
v(t)
x(t)
x (t)q
e (t)
v(t)
q
∆ 2∆ 3∆ 4∆ 5∆ 6∆
−∆/2
∆/2
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 17 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
1 x(t) est équiréparti dans la plage V ⇒ le signal d’erreur eq(t) est àmoyenne nulle.
2 les ∆i ne sont pas nécessairement équidistants.Si (〈eq〉 = 0), alors la puissance moyenne de buit est égale à sa variance :
σ2q = E[e2q]
(5)
Si le signal a la densité de probabilité p(x) de prendre la valeur x , ilaura la probabilité p(xi ) d’être quantifié en xi .
Rappel :
+∞∫
−∞p(x)dx = 1
N−1∑
i=1p(xi )∆i = 1
(6)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 18 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
On peut donc, d’après 5 et 6, exprimer σ2q sous la forme :
σ2q =N−1∑
i=0
[∫
∆i
(x − xi )2 p(x)dx
](7)
S’il est possible d’assimiler p(x) et p(xi ), (N grand) :
σ2q =N−1∑
i=0p(xi )
[∫
∆i
(x − xi )2 dx
](8)
Si xi est la médianne de l’intervalle, (7) s’écrit :
σ2q =N−1∑
i=0p(xi )
xi +∆i /2∫
xi −∆i /2
(x − xi )2 dx
=N−1∑
i=0p(xi ).
∆3i
12
(9)
⇒ connaître p(xi ) permet de minimiser la puissance du bruit dequantification σ2q.J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 19 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Quantification uniforme
∆i = ∆ = D
D = 2N
α
−1 +1
+1
−1
2
Quantification uniforme
y
x
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 20 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Si p(xi ) = cste (Loi uniforme) alors ∆i = ∆ et (9) devient :
σ2q =∆2
12 (10)
Pour une conversion sur n bits et une plage de conversion V∆ = V
2n−1 approximé par ∆ = V2n ( 2n grand)
pas de quantification ∆ “quantum”.
Second critère de choix d’un CAN : le RSBDans la pratique, on le choix d’un CAN s’effectue généralement à partir deconsidérations sur le RSB (Rapport Signal à Bruit). Le RSB est définitpar :
RSB =Pxσ2q
(11)
Px : puissance du signal analogique à quantifierσ2q puissance du bruit de quantification.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 21 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
En décibel (dB), l’équation (11) donne :
RSBdB = 10.log10(
Pxσ2q
)
= 6.n + 10.77− 10.log10(
PxV 2
)− [FdB]
(12)
F : facteur de crêteEmpiriquement F est de l’ordre de 12 à 15 dB pour la quantificationdes signaux sonores.
Remarque 1 : Ce rapport signal sur bruit dépend beaucoup de l’amplitudedu signal par rapport à la plage V , ce qui défavorise les petits signaux.Remarque 2 : Ce rapport augmente de 6dB quand on double le nombre deniveaux c’est à dire quand on ajoute un digit de codage.Remarque 3 : si x(t) signal sinusoïdal d’amplitude crête-crête V(Amplitude Max. = V /2), (12) devient :
RSBdB = 6× n + 1.8− [FdB] (13)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 22 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Quantification non-uniforme
+1
−1
2
D=2/N
+1−1
x i
α
∆ i
N niveaux Codage non−uniforme
∆ i+1
y
x
Signal codé y normalisé et signal converti (entre −1 et +1),N niveaux, y divisé en N intervalles équidistants : D = 2/N.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 23 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
1 Loi uniforme ⇒ intervalles sur x équidistants : ∆i = ∆ = D ettan (α) = 1.
2 Loi non uniforme, toujours D = 2/N=constante, mais ∆i différents.On a :
tan (α) =
(dydx
)
x=xi
∆i =D
tan (α)=
2N
(dxdy
)
x=xi
Remarque : ∆iest divisé par 2 pour un digit de codage suplémentaire (carN = 2n).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 24 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Loi A et loi µLoi A et loi µ : conversion non-uniformeobjectifRendre le rapport signal sur bruit de quantification indépendant du niveaudu signal,c’est-à-dire imposer Px
σ2Q= cste.
Puissance du signal :
Px =
∫ 1
−1x2p(x)dx
Puissance de bruit donné par (9) avec ∆i dépendant de x , à la limiteet en remplaçant ∆i par son expression :
σ2q =
+1∫
−1p(x).
∆2i
12 dx =
+1∫
−1p(x).
[2N
dxdy
]2
12 dx
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 25 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Le RSB s’écrit alors :
Pxσq
=
+1∫
−1x2p(x)dx
13N2
+1∫
−1
[dxdy
]2p(x).dx
= cste
possible avec dxdy = kx
D’oùPxσq
= 3N2
k2
en dB :(
Pxσq
)dB
= 6n + 4.7− 20.log10 (k)
(car N = 2n avec n le nombre de bit)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 26 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Si dxdy = kx alors :
y =1k Ln |x |+ 1
Irréalisable au voisinage de “0”, les approximations pratiques sont lessuivantes :
Loi µ : (Etats Unis)y = ln(1+µ|x |)
ln(1+µ)µ = 255Loi A : (Europe){ y = Ax
1+ln(A) si |x | < 1A
y = 1+ln(A|x |)1+ln(A) si |x | ≥ 1
AA = 87, 6
[1] ITU -R Recommendation G.711, Pulse Code Modulation of voicefrequencies
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 27 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Valeurs de x
Lo
i A
et
loi
mu
Loi A
Loi mu
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 28 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
Mise en oeuvre pratique
������������
������������
������������
������������
������������
������������
������������
������������
����
����
������������
������������
� � � �
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
������������
� � � �
!�!!�!!�!!�!
"�""�""�""�"
#�##�##�##�#
$�$$�$$�$$�$
%�%%�%%�%%�%
&�&&�&&�&&�&
'�''�''�''�'
(�((�((�((�(
)�))�))�))�)
*�**�**�**�*
A B C D0001A B C D001 1A B C D001 1A B C D01 1 1A B C D001 1A B C D01 1 1A B C D01 1 1A B C D1 1 1 17
A B C D00 1A B C D00 1
A B C D0 1 1A B C D0
A B C D01 1A B C D1
A B C D1 10 10
0 11 01 001 0 0 01 0 0 0 0
A B C D0001 0 0 0 0
y
23456
1x
Pente
1684211/21/4
bit de signe n◦ du segment
n◦ segment CAN : 12 bitsCompression 13 segmentscodé sur 8 bits
Son 8 bits Loi A
1 Europe : compression et codage à 13 segments,2 Etats Unis : compression similaire à 15 segments
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 29 / 32

Chapitre 2 : La source de l’information Codage d’une information analogique MIC (ou PCM)
MIC 30 voies[2] Norme CEPT Commission Européenne des Postes etTélécommunications.
Te = 125 µs => Fe = 8 kHz
MVT 1
IT : 0 1
2
2 16
16
17
17
18
3031
MVT
1 D=2Mbits/s : 30 voies,2 D=8Mbits/s : 120 voies,3 D=34Mbits/s : 480 voies,4 D=140Mbits/s : 1920 voies.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 30 / 32

Chapitre 2 : La source de l’information Modulation différentielles DPCM
AN
extrapolateur extrapolateur
s(t)
e(n)
s(n) s(n)-e(n) m bits
AN
s*(n)-e*(n) s*(n)
e*(n)+-
∑ ∑++
MIC Différentielle (DPCM) : on ne transmet que la différence.
Filtre passe−basde lissage
s*(n)e*(n)
AN
extrapolateur
AN
NA
extrapolateur
s(t) s*(n)∑+
+e*(n)
m bits
+
+
s(n)-e*(n)
s*(n)-e*(n)-+
s(n)s*(n)-e*(n)
∑
∑
Modulateur différentiel
Remarque 1 : choix de l’interpolateur fonction de la statistique du signals(t).Remarque 2 : l’interpolation la plus courante consiste à prendresimplement l’échantillon précédent e*(n)=s*(n-1).Remarque 3 : on peut parfois améliorer l’interpolation en intégrant lesignal avant codage (exemple : modulation delta-sigma (Σ∆)).J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 31 / 32

Chapitre 2 : La source de l’information Modulation différentielles DPCM
Modulation ∆
Cas particulier : modulation ∆ :
tt
∆
Phénomène de traînage1 1 1 1 0 1 0 1 0 0 1 0 1
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 2) Vendredi 13 mars 2015 32 / 32

UE433 Communications numériquesChapitre 3 - Choix d’un code en bande de base (BdeB)
Jean-Pierre BarbotUniversité Paris Sud 11 / ENS Cachan
M1-IST
Vendredi 13 mars 2015

1 Chapitre 3 : Choix d’un code en Bande de BaseMise en équationClassificationCodes BdeB usuelsEmbrouillage et étalement de spectre
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 2 / 42

Chapitre 3 : Choix d’un code en Bande de Base
Signal en Bande de Base (BdeB) ⇔ signal n’ayant pas subit detransposition en fréquence
un code en bande de base 6= codage source ou canal, n’est pas uncryptage,consiste à :
choisir une forme d’impulsion de tension,des niveaux de tension
ceci afin de transmettre un débit D dans un canal de bande passanteB.
Le codage en BdeB assure une DSP compatible avec la fonction detransfert du canal, + transmission fréquence horloge.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 3 / 42

Chapitre 3 : Choix d’un code en Bande de Base
Source
(S)
Bruit
CanalCodage
(C)
Modulation Demodulation
(M) (H) (D)
Egaliseur
Regenrateur
(E)
Decodeur
(Decod)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 4 / 42

Chapitre 3 : Choix d’un code en Bande de Base
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 5 / 42

Chapitre 3 : Choix d’un code en Bande de Base
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 6 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
3.1 Mise en équation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 7 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
Objectif : transmettre dn, mot de code constitué d’une suite d’élémentsbinaires {βn},⇒on émet e(t) (Pulse Amplitude Modulation : PAM)
e(t) =∑
kak .g(t − kT ) (1)
ak pris dans un alphabet de tension {A0,A1, · · · ,AM−1} à M niveauxde tension possibles (cas d’un codage de tension M-aire),g(t) une forme d’impulsion (ex : rectangulaire de durée T ,triangulaire de durée T , impulsion de Nyquist de durée T ).T est la durée du symbole transmis avec T = n.Tb, (transmissiond’un n-uplet d’éléments binaires choisi parmi M = 2n élémentspossibles).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 8 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
Exemples de forme d’impulsiong(t)
t0
V
Tb
Impulsion rectangulaire
−6 −4 −2 0 2 4 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tb
Impulsion de Nyquist(alpha = 0.22)
Impulsion de NyquistJ.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 9 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
Exemple : Cas binaireM = 21,1 seul élément élément binaire transmis pendant T = 1.Tb,ak peut prendre les amplitudes A0 = 0 et A1 = +1.
Exemple : Cas quaternairen = 2,2 éléments binaires transmis simultanément,M = 22 = 4,T = 2.Tb,ak peut prendre par exemple les amplitudes A0 = 0, A1 = +1 ,A2 = +2, A1 = +3 (cas d’un format unipolaire).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 10 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 11 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
La rapidité de modulation en sortie du codeur ligne est donc :
R = 1T
= 1nTb
= Dlog2(M)
(2)
Le débit binaire D = 1/Tb (en bits/s),la rapidité de modulation R = D/log2(M) (en Bauds).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 12 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
e(t) sous forme d’un produit de convolution :
e(t) = g(t) ∗ a(t) (3)
a(t) =∑
kak .δ (t − kT ).
La DSP du signal émis s’écrit (formule des interférences) :
φee(f ) = |G(f )|2 × φaa(f ) (4)
φee(f ) est le V 2/Hz,G(f ) = T .F .(g(t)),φaa(f ) D.S.P. de a(t).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 13 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
Or a(t) est aléatoire ⇒ impossible de calculer A(f ).La DSP φaa(f ) s’obtient par :
φaa(f ) = T .F . (Raa(τ))
avec Raa(τ) définie par :
Raa(τ) = E [a∗(t).a(t + τ)]
= limT 7→+∞
1T
∫ +T/2
−T/2a∗(t).a(t + τ).dt (5)
(unité de Raa(τ) est le V 2).On obtient φaa(f ) à partir des propriétés statistiques de ce signal (codesavec ou sans mémoire, moyenne statistique nulle, stationnarité, ...).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 14 / 42

Chapitre 3 : Choix d’un code en Bande de Base Mise en équation
Remarque 1 La densité spectrale de puissance φee(f ) d’un signalnumérique e(t) est constituée d’éventuelles raies et dumodule au carré de la transformée de Fourier G(f ) au carréde l’impulsion g(t). Parmi les propriétés recherchées danscertains codes en bande de base, celle de la présence deraies à la fréquence d’horloge du code (fhorl−code = 1/T )est très importante. Cette propriété permet lasynchronisation du récepteur à l’aide par exemple d’une PLL,boucle de Costas, ....
Remarque 2 La fonction d’autocorrelation de e(t), Ree(τ) est périodique.Cette propriété s’appele la cyclostationarité. Elle est utiliséedans certaines applications pour la récupération du rythme Tet la synchronisation.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 15 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
3.2 Classification
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 16 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Les codes en BdeB peuvent être classés suivant les arguments :1 Codes (ou formats) NRZ et RZ,2 Codes (ou formats) M-aires unipolaires ou antipolaires,3 Codes avec ou sans mémoires
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 17 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Codes RZ et NRZ
RZ = Return to Zerol’impulsion utilisée repasse par zéro pendant T
g(t) =
6= 0 ∀t ∈ [0, λT [
0 ∀t ∈ ]λT ,T ]
NRZ = Non Return to Zerol’impulsion utilisée ne repasse pas par zéro pendant T
g(t) 6= 0 ∀t ∈ [0,T [
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 18 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Codes (ou formats) M-aires unipolaires ou antipolaires
M-Aires : information codée sur plusieurs niveaux de tension(Bin-aires = 2 niveaux de tension)Les codes unipolaires ⇔ un seul signe,càd ttes les différentes amplitudes possibles de ak(ak ∈ {0, 1, 2, · · · ,m − 1}) pour un codes m-aire sont toutes positives(ou toutes négatives. ⇒ leurs moyennes ne sont pas nulles.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 19 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Codes (ou formats) M-aires unipolaires ou antipolaires(suite)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 20 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Codes (ou formats) M-aires unipolaires ou antipolaires(suite)
Les codes antipolaires sont symétriques par rapport à 0, on distingue :les cas pairs : ak ∈
{± 1
2 ,± 32 ,± 5
2 , · · · ,±m2}
les cas impairs : ak ∈{0,± 1
2 ,± 32 ,± 5
2 , · · · ,±m2}
Les codes antipolaires peuvent être à moyenne statistique nulle.
Exemple :pour une transmission binaire ak = ±1
2 peut convenir,Le cas impair ne peut convenir au binaire (exemple du cas ternaireak ∈
{0,±1
2
}à trois niveaux), mais peut être utilisé pour un système
binaire pseudo-ternaire.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 21 / 42

Chapitre 3 : Choix d’un code en Bande de Base Classification
Codes avec ou sans mémoire
Codes BdeB sans mémoire : transcodage systématique.exemple : dans le cas binaire, on aura toujours :ak = +1 si βk = 1ak = 0 si βk = 0Codes avec mémoire utilise les valeurs des bits précédemmenttransmis (βk−1, βk−2, ... etc) pour déterminer la valeur de ak .exemple : codes AMI (Alterned Marked Impulsion) où le bit βk = 1est codé altenativement par ak = +1 et ak = −1.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 22 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
3.3 Codes BdeB usuels
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 23 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Rappel :
φee(f ) = |G(f )|2 × φaa(f ) (6)
Dans le cas d’un code BdeB :1 à symboles indépendants (sans mémoire),2 à symboles identiquement distribués (même Prob. d’apparition pour
chaque symbole)alors :
φaa(f ) =σ2aT +
m2a
T 2
+∞∑
k=−∞δ
(f − k
T
)(7)
ma la moyenne statisque de ak (ma = E [ak ] ∀k),et σ2a la variance du signal (σ2a = E
[|ak −ma|2
]∀k).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 24 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Codes NRZ binaires
NRZ binaire antipolaire
Tb
1 l 0 l 1 l 0 l 0 l 1 l
+V
−V
t
g(t)
b2T 3T 4T 6T
b b5T
b b
on a :ak = +1 si βk = 1ak = −1 si βk = 0alors ma = 0, σ2a = V 2.Pour la forme d’impulsion rectangulaire (généralement le cas) :
φee(f ) = V 2Tb.(sinπfTb
πfTb
)2(8)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 25 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Code NRZ binaire unipolaire on a :ak = +1 si βk = 1ak = 0 si βk = 0⇒ ma = +V /2 et σ2a = V 2/4, d’où :
φee(f ) =V 2Tb4 .
(sinπfTbπfTb
)2+
V 2
4 δ(f ) (9)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 26 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Code NRZ M-AireGénéralisation du code NRZ binaire.Soit ak ∈ {±1,±2, · · · ,±(M − 1)},
ma = 0
σ2a = 2M
(M/2)−1∑
p=0(2p + 1)2
Si impulsion rectangulaire de durée T = nT b
φee(f ) =(M − 1)2
3 .V 2T .(sinπfT
πfT
)2(10)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 27 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Codes RZ binairesPour un RZλ et une impulsion rectangulaire, on a :
g(t) =
+V ∀t ∈ [0, λTb]
0 ∀t ∈ ]λTb,Tb]
φee(f ) = V 2λ2Tb4 .
(sinπf λTbπf λTb
)2
+V 2λ2Tb4
+∞∑
k=−∞
(sin (kπλ)kπλ
)2δ
(f − k
Tb
) (11)
Le plus classique : code RZ1/2.Pour RZ1/2 :Avantage : Raie à 1/Tb,Incovéniant : longue suite de 0l ⇒ D.S.P. s’annule.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 28 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Code Manchester :ak = +1 si βk = 1ak = −1 si βk = 0Pour une impulsion rectangulaire :
g(t) =
+V ∀t ∈[0, Tb
2
]
−V ∀t ∈]
Tb2 ,Tb
]
0 ∀t /∈ [0,Tb]
alors :
φee(f ) = V 2Tb.
(sinπf Tb
2πf Tb
2
)2
.
(sinπf Tb
2
)2(12)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 29 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
remarque 1 : Codage Manchester est un transcodage 1B2B(le 1l est codé par 10 alors qu’un 0l est codé par 01. Lesdeux mots 11 et 00 ne sont jamais utilisés.
remarque 2 : La DSP d’un code Manchester a une raie à la fréquencef = 1/Tb (synchronisation possible).Sa densité spectrale de puissance est nulle à f = 0.Une longue suite de 0l⇒ D.S.P. 7→ 0.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 30 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Codes en Bande de Base à symboles dépendants
Code Bipolaire RZ1/2 : (également appelé code AMI-RZ1/2)ak = ±1 si βk = 1ak = 0 si βk = 0donc ma =0 et σ2a = 1/2.Impulsion de type RZ1/2, ici de forme rectangulaire :
g(t) =
+V ∀t ∈[0, 12Tb
]
0 ∀t ∈]12Tb,Tb
]
φee(f ) =V 2Tb4 sin2 (πfTb) .sinc2
(πfTb2
)(13)
Remarque : le code bipolaire RZ1/2 est un code à symboles dépendants(ou code avec mémoire)J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 31 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Cas d’un code avec mémoirePour un code avec “mémoire” :
φaa(f ) =σ2aT +
2σ2aT
∞∑
k=1Raa (k) cos (2πkfT ) +
m2a
T 2
+∞∑
k=−∞δ
(f − k
T
)(14)
avec : ma la moyenne statisque de ak (ma = E [ak ] ∀k),σ2a la variance dusignal (σ2a = E
[|ak −ma|2
]∀k), Raa (k) fonction d’aucorrélation
normalisée des symboles ak
Raa (k) =E [(an −ma) (an−k −ma)]
σ2a
Remarque : e(t) prend 3 niveaux de tension : {+V ,−V , 0}, (1l codéalternativement par {+V ,−V }, 0l par 0 Volts : code pseudo-ternaire.Si{βk} est une longue succession de 0l ⇒ D.S.P. → 0.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 32 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Code Bipolaire NRZ (AMI NRZ)Comme pour le code bipolaire :ak = ±1 si βk = 1ak = 0 si βk = 0Avec g(t) NRZ de forme rectangulaire
g(t) =
+V ∀t ∈ [0,Tb]
0 ∀t /∈ [0,Tb]
Longue suite de 0l , D.S.P 7→ 0.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 33 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Codes HDBn
But : éviter DSP 7→ 0 pour une longue suite de 0l ,⇒ code HDBn interdisent la transmission de plus de n “0l” successifs.Le plus utilisé, le code HDB3 :Exemple :
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 34 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 35 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Code de Miller :Ce code contient une transistion au moins toutes les deux durées Tb,⇒ récupération possible de l’horloge.
φee(f ) = V 2Tb [1− cos (2πfTb)][1− cos (πfTb)]
(πfTb)2 (15)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 36 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 37 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 38 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Autres codes en BdeB :Buts :s’affranchir d’une suite de digits identiques,éventuellement de détecter des erreurs, ...Moyen : transcodage de x éléments binaires en mots de y symbolesM-aires.Nom : transcodage xByM (bien sur My > 2x ).Exemple :le transcodage 5B6B (32 mots binaires de 5 digits en 64 mots binaires de6 digits) un mot sur deux n’est pas utilisé ce qui permet de détecter desanomalies de transmission.Le transcodage 4B3T qui transforme 16 mots binaires en 27 motsternaires, très utilisé car bien adapté aux câbles coaxiaux.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 39 / 42

Chapitre 3 : Choix d’un code en Bande de Base Codes BdeB usuels
Cas particulier :code CMI (Coded Mark Inversion)
Il s’agit d’un code établi à partir d’un transcodage 1B2B. Le bit βk = 0 estcodé par la suite binaire 10 et le bit βk = 1 est codé alternativment par 11et 00. Ce transcodage est bien adapté à la transmission sur fibre optique.
code ManchesterIl s’agit à nouveau d’un code établi à partir d’un transcodage 1B2B.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 40 / 42

Chapitre 3 : Choix d’un code en Bande de Base Embrouillage et étalement de spectre
3.4 Embrouillage et étalement de spectre
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 41 / 42

Chapitre 3 : Choix d’un code en Bande de Base Embrouillage et étalement de spectre
Afin d’assurer dans une suite d’éléments binaires une succession detransistion suffisante, on utilise parfois un embrouilleur-désembrouilleur :
Autres applications :pour le cryptage d’informations numériques,pour l’étalement de spectre (exemple : communications par satellitesen large bande),pour permettre l’accès multiple en CDMA (exemple de système : lanorme Européenne 3G UMTS).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 3) Vendredi 13 mars 2015 42 / 42

UE433 Communications numériquesChapitre 4 - Transmission dans un canal en bande de
base (non bruité)
Jean-Pierre BarbotUniversité Paris Sud 11 / ENS Cachan
M1-IST
Vendredi 13 mars 2015

1 Chapitre 4 : Transmission dans un canal BdeB (non bruité)Définitions (et rappels)Carractéristiques du canalPremier critère de NyquistImpulsions de NyquistCapacité du canal
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 2 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Définitions (et rappels)
4.1 Définitions (et rappels)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 3 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Définitions (et rappels)
Objectif : transmettre dn, mot de code constitué d’une suite d’élémentsbinaires {βn},⇒on émet e(t) (Pulse Amplitude Modulation : PAM)
e(t) =∑
kak .g(t − kT ) = a(t)⊗ g(t) (1)
ak pris dans un alphabet de tension {A0,A1, · · · ,AM−1} à M niveauxde tension possibles (cas d’un codage de tension M-aire),⊗ est le produit de convolution, a(t) =
∑
kak .δ(t − kT ),
g(t) une forme d’impulsion (ex : rectangulaire de durée T ,triangulaire de durée T , impulsion de Nyquist de durée T ).T est la durée du symbole transmis avec T = n.Tb, (transmissiond’un n-uplet d’éléments binaires).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 4 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Définitions (et rappels)
Définitions à connaître :1 La rapidité de modulation : R = 1/T (ou rapidité de modulation), R
s’exprime en Bauds.2 Le débit binaire D = 1/Tb (en bit/s),avec Tb la durée d’un bit (ou
digit) .Comme T = log2(M).Tb, on a :
R =D
log2(M)(2)
D’où, pour M (ou moments) fixé :
M D2 D = R3 D = 1.538R4 D = 2R
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 5 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
4.2 Caractéristiques du canal
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 6 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
Source
+codage
(S+C)
Bruit
Canal
(H)
Fitre de
e(t) n(t)
Gr(f)
reception
t=t0+nT
Detecteur
a seuil
Filtre
d’emission
G(f)
d(t)r(t)
Canal supposé :1 linéaire et invariant ⇒ entièrement caractérisé par sa réponse
fréquentielle H(f ),2 bruité par un bruit n(t) additif.3 de type passe-bas et de bande B (transmission en bande de base).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 7 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
Source
+codage
(S+C)
Bruit
Canal
(H)
Fitre de
e(t) n(t)
Gr(f)
reception
t=t0+nT
Detecteur
a seuil
Filtre
d’emission
G(f)
d(t)r(t)
Le signal reçu et filtré r(t), s’écrit :
r(t) = gr (t)⊗ h(t)⊗ e(t) + gr (t)⊗ n(t)= gr (t)⊗ h(t)⊗
∑
kak .g(t − kT ) + b(t)
=∑
kak .y(t − kT ) + b(t)
(3)
g(t) la forme d’impulsion (filtre d’émission G(f )),gr (t) la réponse impulsionnelle du filtre de réception (de fonction detransfert Gr (f )),b(t) la contribution du Bruit
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 8 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
Précisons :b(t) est supposé Additif Blanc Gaussien (BABG), à moyenne nulle etde variance σ2 :
p(b) = 1√2πσ2
exp(− b2
2σ2
)(4)
Le filtre de réception peut être optimisé afin de maximiser le rapportsignal sur bruit après réception.Dans ce cas :
Goptr (f ) = (G(f ).H(f ))∗ (5)
Nous supposerons maintenant que Gr (f ) = Goptr (f ).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 9 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
Ainsi, après échantillonnage à l’instant de prise de décision, nous auronsdonc :
r(t0 + nT ) =∑
kak .y(t0 + nT − kT ) + b(t0 + nT ) = d(t0 + nT )
r(t0 + nT ) = any(t0) +∑
k 6=nak .y(t0 + (n − k)T ) + b(t0 + nT ) (6)
Dans cette espression :any(t0) représente l’information voulue,∑
k 6=nak .y(t0 + (n − k)T ) terme due à l’Interférences Entre Symboles
transmis (IES),et b(t0 + nT ) contribution du bruit BABG.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 10 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
Pour un récepteur est parfaitement synchronisé, on souhaite qu’à l’instantde prise de décision :
r(t0 + nT ) = any(t0) + b(t0 + nT ) (7)
donc il faut :∑
k 6=nak .y(t0 + (n − k)T ) = 0 (8)
Le terme d’interférence entre symboles s’écrivant :
IES =∑
k 6=nak .y(t0 + (n − k)T )
=∑
kak .gr (t0 + nT )⊗ h(t0 + nT )⊗ g(t0 + (n − k)T )
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 11 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
L’IES dépend ainsi de h(.) et du choix de g(.) et de gr (.).Dans le cas d’un filtre de réception optimal Gopt
r (f ) = (G(f ).H(f ))∗et pour une synchronisation parfaite, l’annulation de l’IES consiste àchoisir une forme d’impulsion compatible avec le canal et telle quel’IES soit nulle (équation (8)).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 12 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Carractéristiques du canal
En résumé :
Le canal de transmission engendre plusieurs effets :1 De possibles interférences entre symboles (IES) ⇒ forme de
l’impulsion et filtre de réception en fonction de critères liés à laréponse impulsionnelle du canal.Le canal sera supposé, pour une transmission en bande de base, detype passe-bande de bande passante B,⇒ choix de choix : le “premier critère de Nyquist”.
2 La bande passante limitée B et la présence de bruit conduisent àlimiter le débit maximal de la transmission D : Dmax < C , C la“capacité de Shannon”.
3 A cause de ce buit additif, il y a des risques d’erreurs de décision ensortie du détecteur à seuil⇒ calcul de la“probabilité d’erreur”.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 13 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Premier critère de Nyquist
4.3 Premier critère de Nyquist
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 14 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Premier critère de Nyquist
En l’absence de bruit, on a :
r(t0 + nT ) = any(t0) +∑
k 6=nak .y(t0 + (n − k)T ) (9)
Si on souhaite que :
r(t0 + nT ) = any(t0)
il faut que :
y(t0 + nT ) =
y(t0) pour n = 0
0 ∀n 6= 0(10)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 15 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Premier critère de Nyquist
Exprimons cette condition en sortie de l’échantillonneur de prise dedécision d(t) :
d(t) = y(t)∑
nδ (t − t0 − nT ) (11)
dont la transformée de Fourier s’écrit :
D(f ) = 1T∑
nY(
f − nT
)e−j2πn t0
T (12)
Or, comme (11) s’écrit également :
d(t) =∑
ny(t0 + nT )δ (t − t0 − nT ) (13)
expression dont la transformée de Fourier est :
D(f ) =∑
ny(t0 + nT ).e−j2πf (t0+nT ) (14)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 16 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Premier critère de Nyquist
Sachant que (12) et (14) sont égales (unicité de la transformée deFourier), il vient :
∑
nY(
f − nT
)e−j2π(f− n
T )t0 = T .y(t0) (15)
En posant :
Y (t0)(f ) = Y (f )y(t0)
.ej2πft0 (16)
le premier critère de Nyquist s’énonce donc ainsi :∑
nY (t0)
(f − n
T
)= T (17)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 17 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Premier critère de Nyquist
A SAVOIR
1 On ne peut pas transmettre sans Interférence Entre Symboles (IES)un signal de rapidité de modulation R = 1/T dans une bandeinférieure à 1/2T .
2 un canal respectant le premier critère de Nyquist est tel queB ≥ 1/2T .
3 On appelle bande de Nyquist :BNyquist = 1/2T (18)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 18 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
4.4 Impulsion de Nyquist
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 19 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
Toutes les fonctions qui satisfont l’équation (17) :∑
nY (t0)
(f − n
T
)= T
vérifient le critère de Nyquist.
L’impulsion du filtre rectangulaire :
G1(f ) = T ∀f ∈[− 1
2T ,12T
]
G1(f ) = 0 ailleurs
vérifie l’équation (17),d’où à g1(t) = sinc
(πtT).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 20 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
Problème : lobes secondaires élevés (dramatique en cas d’une mauvaisesynchronisation)Il faut chercher un filtre ayant des lobes secondaires moins élevés....Donc 2 critères :
1 Vérifier le 1er critère de Nyquist,2 avoir une impulsion ayant de faibles lobes secondaires.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 21 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
Impulsion de Nyquist
Le filtre en cosinus surélevé vérifie ces 2 critères :
G2(f ) =
T ∀f ∈[−1−α
2T , 1−α2T
]
T2
[1+ sin
(πTα
(12T − |f |
))]1−α2T ≤ |f | ≤ 1−α
2TG1(f ) = 0 ailleurs
et donc g2(t) =sin(πt
T ) cos(παtT )
πtT .
(1−4α2 t2
T2
) .
avec α,le Roll Off, tel que 0 ≤ α ≤ 1.Pour α = 0, on reconnait l’impulsion g1(t), pour α = 1 on reconnaitl’impulson du filtre de Hanning.
Exemple : pour le système de téléphonie radio-mobile 3G UMTS,l’impulsion a un Roll Off α = 0.22.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 22 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 23 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Impulsions de Nyquist
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 24 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Capacité du canal
4.5 Capacité du canal
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 25 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Capacité du canal
Hartley, Tuller et Shannon (HTS) ont établi une formule universellementreconnue comme critère bien qu’en grande partie empirique :
m ≤ mmax =
√
1+ SN (19)
où S/N est le rapport signal sur bruit, S étant la puissance du signal, N lapuissance du bruit.
rappel Comme S et N sont des puissances, le rapport signal sur bruitexprimé en dB s’obtient par (S/N)dB = 10.log10 (S/N).
C’est une limite supérieure qu’on ne peut “a priori” jamais atteindre, maisqui permet de caractériser les performances maximales d’un canal detransmission.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 26 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Capacité du canal
C , la capacité du canal, est le nombre maximal de bits qu’il est susceptiblede transmettre par seconde :D’après les relations (2 et 18) il vient :
C = Dmax = R.log2 (mmax ) = B.log2(1+ S
N
)(20)
L’unité de C est bien sur le bit/s. C est la capacité de Shannon.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 27 / 28

Chapitre 4 : Transmission dans un canal BdeB (non bruité) Capacité du canal
A savoir :Pour un canal de transmission de type passe-bas (en bande de base), debande passante B et bruité par un BABG (Bruit Additif Blanc Gaussien),le débit doit toujours être inférieur à :
C = Dmax = B.log2(1+ S
N
)(21)
C s’appelle capacité de Shannon, exprimée en bits/s, S est la puissance dusignal transmis et N est la puissance du bruit.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 4) Vendredi 13 mars 2015 28 / 28

UE433 Communications numériquesChapitre 5 - Egalisation
Jean-Pierre BarbotUniversité Paris Sud 11 / ENS Cachan
M1-IST
Vendredi 13 mars 2015

1 Chapitre 5 : EgalisationEgaliseur numériqueRèglage de l’égaliseur
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 2 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Egaliseur numérique
Source
+codage
(S+C)
Bruit
t=t0+nT
Detecteur
a seuil
d(t)r(t)Canal
(H)
Fitre de
e(t) n(t)
Gr(f)
reception
Filtre
d’emission
G(f)
Egaliseur
(E)
Figure: Chaîne de transmission numérique avec égaliseur
Un canal de transmission idéal :
h(t) = K .δ(t − τ) (1)
(càd H(f ) = TF (h(t)) = K .e−2iπf τ )
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 3 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Si le canal était idéal :signal en sortie du canal sans déformation,si de plus l’impulsion émise vérifiait le critère de Nyquist, il suffiraitalors dans ce cas de se placer au rythme d’échantillonnage T etd’isoler, en comparant l’amplitude du signal reçu à des seuils, lesdifférents niveaux correspondants au code m-aire (voir figure 1).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 4 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Pour un canal H(f ) quelconque, les effets :du bruit (N élevée),des atténuations (S faible),de la bande limitée B (IES), · · ·
⇒les échantillons prélevés conduisent à des erreurs d’interprétation.
Afin de limiter les effets du canal on place toujours un égaliseur (E) dansla chaîne de réception du signal.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 5 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Remarque :(Attention) Le rôle de l’égaliseur n’est pas le même en transmissionanalogique et en transmission numérique.
En transmission analogique, l’idéal consiste à réaliserH(f ).E (f ) = exp (−2πf τ), ce qui correspond à un simple retard τ , etrevient donc à éliminer les effets du canal pour se ramener, vu durécepteur, à un canal idéal.Théoriquement il faudrait donc réaliser |E (f )| = |H(f )|−1, c’est àdire, dans le cas d’un canal analogique, l’égaliseur idéal est un filtreinverse.Pour une transmission numérique : il faut que l’impulsion reçue et vueaprès l’égaliseur respecte le premier critère de Nyquist.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 6 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Ainsi, il faut que :∑
nG(
f − nT
).H(
f − nT
).Gr
(f − n
T
).E(
f − nT
)= T (2)
Une réalisation possible est alors :
G(
f − nT
).H(
f − nT
).Gr
(f − n
T
).E(
f − nT
)= T .rect1/T (f ) (3)
pour une impulsion issue d’un filtre rectangulaire.Comme nous l’avons vu au chapitre précédent, on choisit plutôt unimpulsion de Nyquist.L’égaliseur est implémenté numériquement et s’apparente à un filtrenumérique.Différentes stratégies d’optimisations sont possibles (Moindres carrés,adaptatifs, etc...).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 7 / 11

Chapitre 5 : Egalisation Egaliseur numérique
Figure: Egaliseur DFE (Decision Feedback Equalizer)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 8 / 11

Chapitre 5 : Egalisation Règlage de l’égaliseur
Réglage de l’égaliseur
Figure: Diagramme de l’oeil
Dans cet exemple , on voit superposées plusieurs réalisations du signalreçu, c’est à dire plusieurs impulsions successives.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 9 / 11

Chapitre 5 : Egalisation Règlage de l’égaliseur
Les indications fournies par le diagramme de l’oeil sont :1 L’épaisseur de la paupiére (a) qui est un indicateur de la présence et
de l’écart type du bruit additif,2 L’ouverture de l’oeil permet de savoir si la détection sera aisée ou non
(immunité au bruit),3 la commisure de l’oeil, (c), permet de savoir si le signal présente de la
“gigue”, c’est à dire si l’on est ou non parfaitement synchronisé.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 10 / 11

Chapitre 5 : Egalisation Règlage de l’égaliseur
Ce diagramme permet également de détecter la présence d’interférencesentre symboles (IES), et donc savoir si l’égaliseur remplie son rôle et s’il acompensé les effets des éléments de la chaîne de transmission.
Figure: Diagramme de l’oeil en présence d’IES
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 5) Vendredi 13 mars 2015 11 / 11

UE433 Communications numériquesChapitre 6 - Erreurs de décision (influence du bruit)
Jean-Pierre BarbotUniversité Paris Sud 11 / ENS Cachan
M1-IST
Vendredi 13 mars 2015

1 Chapitre 6 : Erreurs de décision (influence du bruit)HypothèsesTaux d’erreur binaire (BER)Introduction du rapport signal sur bruit (S/N)Filtre adapté (optimisation du RSB)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 2 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Hypothèses
Hypothèses
1 Synchronisation parfaite,2 égalisation parfaite de la chaîne de transmission⇒les erreurs de décision sont uniquement dues au bruit.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 3 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
Taux d’erreursLe signal reçu r(t) peut se mettre sous la forme :
r(t) = u(t) + b(t) (1)
u(t) la partie utile du signal, que l’on échantillonne à l’instant de prisede décision,b(t) le bruit, que l’on suppose BABG, c’est à dire tel que :
p(b) =1√2πσ2
exp(− b2
2σ2
)(2)
DéfinitionLe Taux d’Erreur Binaire (TEB) ou Bit Error Rate (BER) est défini par :
BER =nbre bits faux
nbre total de bits transmisJ.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 4 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
Taux d’erreurOn appelle taux d’erreur, ε, la probabilité de prendre une mauvaisedécision sur l’information transmise→ sachant les conditions de bruit (càd pour une variance de bruit σ2donnée)→ en connaissant l’emplacement des seuils de décision,→ en connaissant la probabilité d’apparition des symboles.
Utilité : permet de connaitre a priori la qualité de la transmission.Remarque : dans le cas binaire, ε = εb s’appelle Taux d’Erreur Binaire(BER en anglais pour Bit Error Rate)Exemple : dans le cahier des charges de l’ADSL, le BER maximal est fixé àεb ≤ 1.10−7
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 5 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
ExempleSoit une transmission binaire, où :
u(t0) = +1V si le bit transmis est un 1l ,u(t0) = −1V si le bit transmis est un 0l ,p(1l ) = p(0l ) = 0.5la variance du bruit est σ2
En conséquenceLe seuil est placé à : 0 Volt,on a un écart de ∆ = 2V entre les niveaux de tension.
Erreur de décision ⇔ décider qu’un 1l avait été transmis alors que c’étaitun 0l (et inversement).Ecrivons ce qu’est ε dans ce cas concret :
ε = prob (de transmettre un 0l ) .prob (choisir un 1l )+prob (de transmettre un 1l ) .prob (choisir un 0l )
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 6 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
Ce qui peut se ré-écrire sous la forme :
ε = p (0l ) .prob (r(t0) > 0) + p (1l ) .prob (r(t0) < 0)
où r(t0) est la tension mesurée à l’instant de prise de décision.Représentons à quoi cela correspond :
Figure: Probabilité d’erreur d’estimation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 7 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
On peut donc maintenant calculer la probabilité d’erreur :
ε = p (0l ) .prob (r(t0) > 0) + p (1l ) .prob (r(t0) < 0)
Si p (0l ) = p (1l ) = 1/2, et p(x) donné par (2) :
ε = 12 ×
∫ +∞
0
1√2πσ2
exp(−(x + ∆/2)2
2σ2
)dx
+12 ×
∫ 0
−∞
1√2πσ2
exp(−(x −∆/2)2
2σ2
)dx
changement de variable x ′ = x −∆/2 :
ε =12 ×
∫ +∞
∆/2σ
1√2π
exp(−(x)2
2
)dx +
12 ×
∫ −∆/2σ
−∞
1√2π
exp(−x2
2
)dx
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 8 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
Comme la loi de distribution Gaussienne est paire, on obtient :
ε =12
∫ +∞
∆/2σ
1√2π
exp(−x2
2
)dx +
12
∫ +∞
∆/2σ
1√2π
exp(−x2
2
)dx
=
∫ +∞
∆/2σ
1√2π
exp(−x2
2
)
⇒ fct de répartition complémentée de la loi Gaussienne normalisée(σ = 1) :
Gc(
∆2σ
)=
∫ +∞
∆/2σ
1√2π
exp(−x2
2
)dx
= 1−∫ ∆/2σ
−∞
1√2π
exp(−(x)2
2
)dx
= 1− F ( ∆2σ )
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 9 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 10 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
L’usage, dans le domaine des télécommunications numériques, estd’utiliser la fonction erfc(.) (pour complementary error function) :
erfc(x) =2√π
+∞∫
xexp
(−r2
)dr = 1− erf (x)
la relation entre la fonction Gc(.) et erfc(.) est donc :
Gc (x) =12 .erfc
( x√2
)
Remarque : MatLab possède les fonctions erfc(.) et erf (.).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 11 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Taux d’erreur binaire (BER)
Code m-aire unipolaire
Soit un code m-aire unipolaire tel que :écart entre niveaux uniforme vallant ∆,seuils de décision situés à ∆/2,
le taux d’erreur moyen ε est donné par l’expression :
ε = p (0) .prob(u > ∆
2
)+ p (m − 1) .prob
(u < −∆
2
)
+m−2∑
k=1p(k).prob
(|u| ≥ ∆
2
)
avec : p(k) la probabilité pour que l’on transmette un niveau kSi les niveaux sont équiprobables, p(k) = 1
m on a :
ε =2 (m − 1)
m .Gc
(∆
2σ
)=
(m − 1)
m .erfc(
∆
2√2σ
)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 12 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Introduction du rapport signal sur bruit (S/N)
Expression du taux d’erreur en fonction du rapport signal àbruit
Signal en bande de base est un signal aléatoire, la puissance du signals’exprime sous la forme :
S =m−1∑
k=0p(k).a2k
Si tous les niveaux sont équiprobables et pour un écart constants entreniveaux ∆, on obtient :
pour les codes m−aires unipolaire S = (m−1)(2m−1)6 ∆2
pour les cas antipolaires S = m2−112 ∆2
La puissance du bruit est σ2.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 13 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Introduction du rapport signal sur bruit (S/N)
On obtient avec les formules précédantes :pour les cas unipolaire ε = 2(m−1)
m .Gc(√
32(m−1)(2m−1) .
SN
)
pour les cas antipolaires ε = 2(m−1)m .Gc
(√3
m2−1 .SN
)
et pour les cas binaires, on a respectivement εb = Gc
(√S2N
);
εb = Gc
(√SN
).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 14 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Introduction du rapport signal sur bruit (S/N)
Cas d’un mot à “n” digits
Soit un sytème de transmission dont le taux moyen d’erreur par élémentbinaire εb, avec lequel on transmet une information à l’aide de mots delongueur n (n digits), on peut dire :
que la probabilité pour qu’un élément binaire soit juste est (1− εb),que la probabilité que tous les éb du mot, qui sont indépendants,soient justes, donc que le mot n’ait pas d’erreur, estM(0) = (1− εb)n,que la probabilité pour qu’il n’y ait qu’une erreur (un seul élémentbinaire faux dans le mot) est M(1) = n.εb. (1− εb)n−1,
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 15 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Introduction du rapport signal sur bruit (S/N)
que la probabilité pour qu’il y ait k erreurs dans le mot (k<n) estM(k) = Ck
n εkb (1− εb)n−k avec Ck
n = n!(n−k)!k! ,
que la probabilité pour qu’il y ait au moins une erreur dans le mot estM(> 0) = 1− (1− εb)n qui est souvent approximée par (∼= nεb),que la probabilité pour qu’il y ait plus d’une erreur dans le mot estM(> 1) = 1− (1− εb)n − n.εb. (1− εb)n−1 càd tous les cas possiblesauf ceux où il n’y a pas d’erreur et ceux où il n’y a qu’une erreur.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 16 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
Le filtre adapté
(H)
Filtre deréception
gr(t)
Filtre adapté
t = t0 + nTd(t)
Détecteurà seuil
r(t)CanalFiltred’émission
g(t)a(t)
Bruit
Egaliseur(E)
e(t) s(t)
Chaîne de transmission
Le BER est directement lié au RSB :
par exemple εb = Gc
√
SN
dans le cas binaire antipolaire
⇒ le filtre de réception doit maximiser le RSB à l’instant de prise dedécision, le filtre de réception s’appelle dans ce cas Filtre Adapté
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 17 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
A l’instant de prise de décision t = t0 + nT , le RSB doit être maximal :
S/N =r2 (t0 + nT )
E [b2 (t0 + nT )]
avec :r(t) = gr (t) ∗ s(t) =
∫ +∞
−∞gr (t − τ) s (τ) dτ
b(t) = gr (t) ∗ n(t)
n(t) un BABG de moyenne nulle et de variance σ2n
p(n) =1√2πσ2n
exp(− n22σ2n
)
De plus, on a φbb (f ) = |Gr (f )|2 φnn (f ) (formule des interférences)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 18 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
Puissance de bruit :
N =
+∞∫
−∞φbb(f )df
=
+∞∫
−∞|Gr (f )|2 φnn (f ) df
= σ2n2
+∞∫
−∞|gr (τ)|2 df
Hypothèses- l’égaliseur a parfaitement compensé l’effet du canal- le système est parfaitement synchronisé⇒ s(t0 + nT ) ≈ ge (t0 + nT )
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 19 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
Puissance du signal :
r (t0 + nT ) =
+∞∫
−∞ge (t0 + nT − τ) gr (τ) dτ (3)
S (t0 + nT ) = |r (t0 + nT )|2
=
∣∣∣∣∣∣
+∞∫
−∞ge (t0 + nT − τ) gr (τ) dτ
∣∣∣∣∣∣
2
≤+∞∫
−∞|ge (t0 + nT − τ)|2 dτ ×
+∞∫
−∞|gr (τ)|2 dτ
(inégalité de Schwarz)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 20 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
S (t0 + nT ) sera donc maximale si :
gr (t) = C × g∗e (t0 + nT − t) avec C une constante
(condition pour laquelle l’inégalité de Schwarz devient une égalité)Le filtre adapté a donc pour réponse impulsionnelle :
gr (t) = C × g∗e (TD − t)
Dans ce cas, le RSB s’exprime sous la forme :
S/N =
+∞∫
−∞|ge (t0 + nT − τ)|2 dτ
σ2n2
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 21 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
Réalisation du filtre adapté
(H)
Filtre deréception
gr(t)
Filtre adapté
t = t0 + nTd(t)
Détecteurà seuil
r(t)CanalFiltred’émission
g(t)a(t)
Bruit
Egaliseur(E)
e(t) s(t)
Chaîne de transmission
Réalisation du filtre adaptéPeut être réalisé :- soit directement par une réalisation électronique,- ou numériquement en exploitant les propriétés de la “corrélation”.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 22 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
Rappel : corrélationLa corrélation de 2 fonctions, ge (.) et s (.), peut s’écrire :
Rges(t) =
∞∫
−∞g∗e (τ)s(t + τ)dτ (4)
Par changement de variable, on obtient la “classique” relation entreproduit de convolution et corrélation :
Rges(t) =
∞∫
−∞g∗e (τ)s(t + τ)dτ
=
∞∫
−∞g∗e (−τ ′)s(t − τ ′)dτ ′
= g∗e (−t) ∗ s(t)
(5)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 23 / 24

Chapitre 6 : Erreurs de décision (influence du bruit) Filtre adapté (optimisation du RSB)
On remarquera que :
Rges (t) = g∗e (−t)︸ ︷︷ ︸gr (t)
∗ s(t)
la corrélation de s(.) par ge(.) est donc bien une mise en oeuvre possibledu filtre adapté.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 6) Vendredi 13 mars 2015 24 / 24

UE433 Communications numériquesChapitre 7 - Modulations numériques.
Jean-Pierre Barbot
Université Paris Sud 11 / ENS CachanM1-IST
Vendredi 10 avril 2015

Chapitre 7 : Modulations Numériques
1 RappelsModulation d’AmplitudeModulations Angulaires
2 Modulations numériquesModulation d’amplitudeModulations angulairesFSK cohérenteFSK incohérenteDémodulation
3 Modulations dérivéesMAQExemples d’application
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 2 / 30

Modulation analogique : le modulant contient l’information, laporteuse est un signal (sinusoïde) modulé en amplitude (AM) ouangulairement (FM, PM),Modulation numérique : le modulant contient l’information (souventcode en B de B), la porteuse est un signal (sinusoïde) modulé enamplitude (ASK) ou angulairement (FSK, PSK, DPSK, MSK ) ou enamplitude et en phase (QAM).
⇒ Il n’y a pas de différence entre une modulation analogique et unemodulation numérique.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 3 / 30

Rappels
Rappels
s(t) signal modulé :
s(t) = u(t). cos (2πf0t + φ(t)) = Re [u(t). exp (j (2πf0t + φ(t)))]
f0 7→ fréquence porteuse,u(t) 7→amplitude instantannée, (AM)φ(t) 7→ phase de la porteuse. (FM, PM)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 4 / 30

Rappels Modulation d’Amplitude
AM : u(t) modulée par m(t) et φ(t) = φ0
modulation d’amplitude avec porteuse :u(t) = A (1 + e.m(t))
où e taux de modulation (en %), avec e ≤ 1.
s(t) = A (1 + e.m(t)) cos (2πf0t + φ0)
= A cos (2πf0t + φ0) + A.m.e(t) cos (2πf0t + φ0)
modulation d’amplitude à porteuse supprimée :s(t) = A.m(t) cos (2πf0t + φ0)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 5 / 30

Rappels Modulation d’Amplitude
S(f ) = U(f )⊗ 12 (δ(f − f0) + δ(f + f0))
= 12U(f − f0) + 1
2U(f + f0)
Si U(f ) occupe la bande B, le signal modulé S(f ) occupe la bande :
BAM = 2× B. (1)
bande latérale supérieure U(f + f0) =⇒ BBLU−Sup = Bbande latérale inférieure U(f − f0) =⇒ BBLU−Inf = B
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 6 / 30

Rappels Modulations Angulaires
Modulations angulaires : φ(t) modulée par m(t) et u(t) = Aφi (t) la phase instantanée du signal s(t), définie ainsi :
φi (t) = 2πf0t + φ(t)
fi (t) la fréquence instantanée de s(t) :
fi (t) =12π
dφi (t)
dt = f0 +12π
dφ(t)
dtEn exprimant la fréquence instantanée fi (t) sous la forme :
fi (t) = f0 + ∆.mf (t)
∆ : excursion en fréquence maximale (|mf (t)| ≤ 1).
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 7 / 30

Rappels Modulations Angulaires
fi (t) ∈ [f0 −∆ ; f 0 + ∆].Bande de Carson Bc :
Bc = 2× (B + ∆) = 2B × (1 + β) (2)
β est l’indice de modulation,B est la bande occupée, en bande de base par mf (t).
Modulation FM
mf (t) = α.m(t)
avec α permettant de réaliser la contrainte |mf (t)| ≤ 1Modulation PM
φ(t) = αm(t)
mf (t) =12π
d (α.m(t))
dt =α
2πd (m(t))
dt
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 8 / 30

Modulations numériques
Modulations numériques
Modulations numériquesModulation numérique ≡ modulation analogique dont le modulant est unsignal “type” code en bande de base
Indicateurs suplémentaires :l’efficacité spectrale
η =DB (en bit/s/Hz) (3)
D le débit (en bit/s), avec D = R × log2(M),B bande occupée.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 9 / 30

Modulations numériques
l’énergie bit sur la puissance de bruit :
EbN0
=Energie bit (Joule/bit)
Densité spectrale de bruit unilaterale (W /Hz)(4)
le Rapport Signal à Bruit (RSB) :
PsPb
=D × EbB × N0
= η × EbN0
(5)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 10 / 30

Modulations numériques Modulation d’amplitude
Modulations ASK (Amplitude Shift Keying)
u(t) prend M valeurs discrètes pour une transmission M-aire.Exemple de réalisation :
u(t) s(t)
p(t) = cos(2πf0t)
1 u(t) de type NRZ unipolaire à M niveaux et impulsion rectangulaire :R = 1
T (1er lobe),BASK−Rect = 2R =
2T
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 11 / 30

Modulations numériques Modulation d’amplitude
2 u(t) de type NRZ unipolaire, à M niveaux et dont l’impulsionrespecte le 1er critère de Nyquist :
BASK−Nyquist = R = 2× 12T
Avantages :variations de f0 et de la phase de φ(t) sans influence,
Inconvéniants :très sensible au bruit additif (fading), agissant donc sur l’amplitudedu signal.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 12 / 30

Modulations numériques Modulation d’amplitude
⇒ Cas particulier : OOK (On Off Keying)
Efficacité spectrale :OOK avec impulsion rectangulaire :
ηOOK−rect , DB = 1/T
2×1/T = 0, 5(bit/s)/Hz
OOK respectant le 1er critère de NyquistηOOK−Nyquist , D
B = 1/T2×1/2T = 1 (bit/s)/Hz
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 13 / 30

Modulations numériques Modulation d’amplitude
Représentation polaire de u(t):
s(t) = Re [u(t). exp (j (2πf0t + φ(t)))]
= Re [u(t). exp (jφ(t)) exp (j2πf0t)]
= Re [u(t) exp (j2πf0t)]
0 A0l
Im(u(t))
Re(u(t))
1l
Q
I
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 14 / 30

Modulations numériques Modulations angulaires
Modulation numérique de phase (PSK)
Modulations numériques PSKDans le cas des modulations PSK :
l’amplitude est constante,seule φ(t) code l’info. numérique (u est constante)
s(t) = Re [u. exp (j (2πf0t + φ(t)))]
= Re [u. exp (jφ(t)) exp (j2πf0t)]
= Re [u(t) exp (j2πf0t)]
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 15 / 30

Modulations numériques Modulations angulaires
PSK-2 (BPSK)
Pour une modulation BPSK u(t) = A, φ(t) = {0, π}
s(t) = A cos (ω0t + φ(t) + ϕ)
φ(t) = 0 ou π,à la fréquence R = 1
Tb(on suppose
une BPSK est une modulation d’amplitude
s(t) = ±A. cos (ω0t + ϕ)
⇒ modulation d’amplitude d’un signal sinusoïdal par un signal modulantnumérique au format NRZ antipolaire(±1).⇒ BBPSK−rect = 2R
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 16 / 30

Modulations numériques Modulations angulaires
Efficacité spectrale :ηBPSK−rect = D
B = R2R = 0.5 (bit/s)/Hz
ηBPSK−Nyquist = DB =
1Tb
2× 12Tb
= 1 (bit/s)/Hz
0
Im(u(t))
Re(u(t))
1l
Q
I0l
A−A
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 17 / 30

Modulations numériques Modulations angulaires
Démodulation
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 18 / 30

Modulations numériques Modulations angulaires
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 19 / 30

Modulations numériques Modulations angulaires
PSK-4 (QPSK)
Pour une modulation QPSK u(t) = A, φ(t) ={0, π
2 , π,−π2}
s(t) = A cos (ω0t + φ(t) + ϕ)
φ(t) ∈ {0, π2 , π,−π
2}
à la fréquence rythme R = 1T = 1
2Tb
s(t) = A cos (ω0t + φ(t) + ϕ) =A cos (φ(t))× cos (ω0t + ϕ)− A sin (φ(t))× sin (ω0t + ϕ)
Efficacité spectrale :ηQPSK−rect = D
B = 2R2R = 1 (bit/s)/Hz
ηQPSK−Nyquist = DB = 2 (bit/s)/Hz
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 20 / 30

Modulations numériques Modulations angulaires
0
Im(u(t))
Re(u(t))
Q
IA−A
00
01
10
11
i × A
−i × A
O.L
e(t)
A× cos(2πfpt)
dephas. π2
∑
A× sin(2πfpt)
ak = ±1
bk = ±1
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 21 / 30

Modulations numériques Modulations angulaires
Comme il y a 4 points dans une constellation QPSK, la durée T = 2×Tb.Pour un même débit binaire D = 1/Tb que pour une BPSK,l’encombrement en fréquences sera de 4f = 2. 1
2T = R : (0,7-0,8 R enpratique). L’encombrement est ainsi divisé par deux, ce qui est un grandavantage. Une autre possibilité consiste à doubler le rythme detransmission, en conservant l’encombrement d’une modulation 2 états.
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 22 / 30

Modulations numériques FSK cohérente
Modulation FSK (Frequency Shift Keying)
La fréquence de la porteuse ∈ {f0, f1, f2, · · · , fM−1}.Modulation par sauts de fréquence : FSK (Frequency Shift Keying).
FSK cohérenteA et 0 au rythme (cas unipolaire) R = 1
T ,ou +A et −A, toujours au rythme R = 1
T , (cas antipolaire).
A la sortie du VCO on a la fréquence instantanée :fi (t) = f0 + αA = f0 ±∆
VCOx(t)FSK
Bc(FSK ) = 2.R (β + 1) = 2 (∆ + R)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 23 / 30

Modulations numériques FSK cohérente
f
β = 14 très utilisé (GSM)
β = 1π
intéressant (spectre carré)
β = 12 début d’élargissement
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 24 / 30

Modulations numériques FSK incohérente
Deux oscillateurs de fréquences f1 et f2 différentes, commutés au rythmeR = 1
T suivant un format NRZ.
On a donc :
∆ =|f2 − f1|
2
f0 =f1 + f2
2
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 25 / 30

Modulations numériques Démodulation
systèmes classiques de démodulation de fréquence,(PLLs,discriminateurs de phase)un démodulateurs par comptage,quand β est grand et que les deux fréquences sont éloignées : 2 filtressélectifs .
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 26 / 30

Modulations dérivées
Modulations derivees
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 27 / 30

Modulations dérivées MAQ
MAQ
Modulations MAQC’est à la fois une modulation de phase et d’amplitude :
s(t) = Re [u(t). exp (jφ(t))× exp (j2πf0t)]
u(t) varie, u(t) = {+A,+2A,+3A, · · · },φ(t) varie, φ(t) = {φ1, φ2, φ3, · · · }
Représentation polaire de u(t):
s(t) = Re [u(t). exp (j (2πf0t + φ(t)))]
= Re [u(t). exp (jφ(t)) exp (j2πf0t)]
= Re [u(t) exp (j2πf0t)]
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 28 / 30

Modulations dérivées MAQ
La modulation BPSK (PSK-2) est aussi une MAQ-2 (QAM-2 enanglais)
La modulation QPSK (PSK-4) est aussi une MAQ-4 (QAM-4 inenglish)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 29 / 30

Modulations dérivées MAQ
MAQ-16 (ou QAM-16)
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 29 / 30

Modulations dérivées Exemples d’application
Exemples d’application
Modulation SystèmesMSK, GMSK GSM, CDPD
BPSK telemetrie spatiale, cable.QPSK DQPSK CDMA, DVB-S, cable, cable modems
OQPSK CDMA, satellite, DECT8PSK Satellite, avionique
16 QAM DVB-C, DVB-T (TNT)32 QAM DVB-T64 QAM DVB-C256 QAM DVB-C (Europe), Video numérique(US)4096 QAM ADSL, VDSL2
J.-P. Barbot (U-PSud (M1-IST)) UE433 (Ch 7) Vendredi 10 avril 2015 30 / 30