Embed Size (px)
Citation preview
CINÉMATIQUE DU POINT
Cinématique du Point 1-3 22/01/2016
T(MS/R)
M (t)
tangente en M àT(MS/R)
V(MS/R)
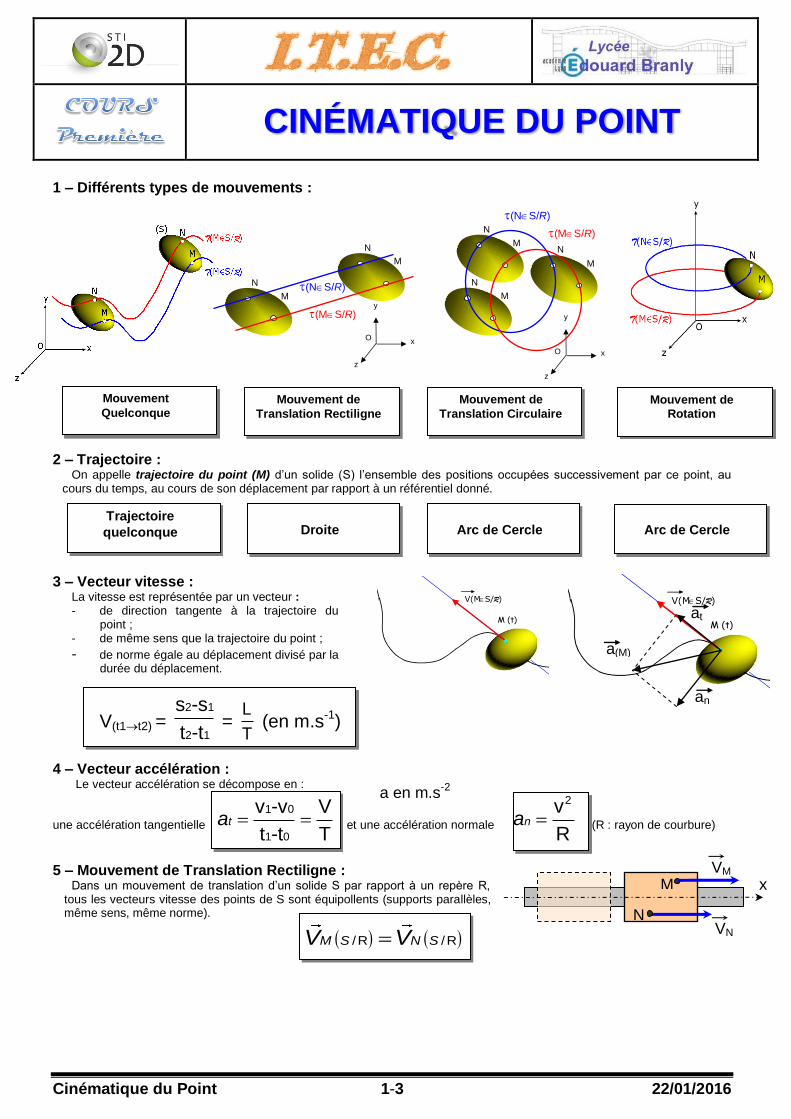
1 – Différents types de mouvements :
2 – Trajectoire : On appelle trajectoire du point (M) d’un solide (S) l’ensemble des positions occupées successivement par ce point, au
cours du temps, au cours de son déplacement par rapport à un référentiel donné.
3 – Vecteur vitesse : La vitesse est représentée par un vecteur : - de direction tangente à la trajectoire du
point ; - de même sens que la trajectoire du point ;
- de norme égale au déplacement divisé par la durée du déplacement.
V(t1t2) = 2 1
2 1
s -s
t -t =
L
T (en m.s
-1)
4 – Vecteur accélération :
Le vecteur accélération se décompose en :
une accélération tangentielle
1 0
1 0
v -v V
t -t Tta et une accélération normale na
2v
R (R : rayon de courbure)
5 – Mouvement de Translation Rectiligne :
Dans un mouvement de translation d’un solide S par rapport à un repère R, tous les vecteurs vitesse des points de S sont équipollents (supports parallèles, même sens, même norme).
N
M
N
M
(MS/R)
(NS/R)
O
z
x
y
N
M N
M
N
M
(MS/R)
(NS/R)
O
z
x
y
Mouvement
Quelconque Mouvement de
Translation Rectiligne Mouvement de
Rotation Mouvement de
Translation Circulaire
/R /RM S N SV V
x VM M
N VN
T(MS/R)
M (t)
tangente en M àT(MS/R)
V(MS/R)
an
at
a(M)
Trajectoire
quelconque Droite Arc de Cercle Arc de Cercle
a en m.s-2
Cinématique du Point 2-3 22/01/2016
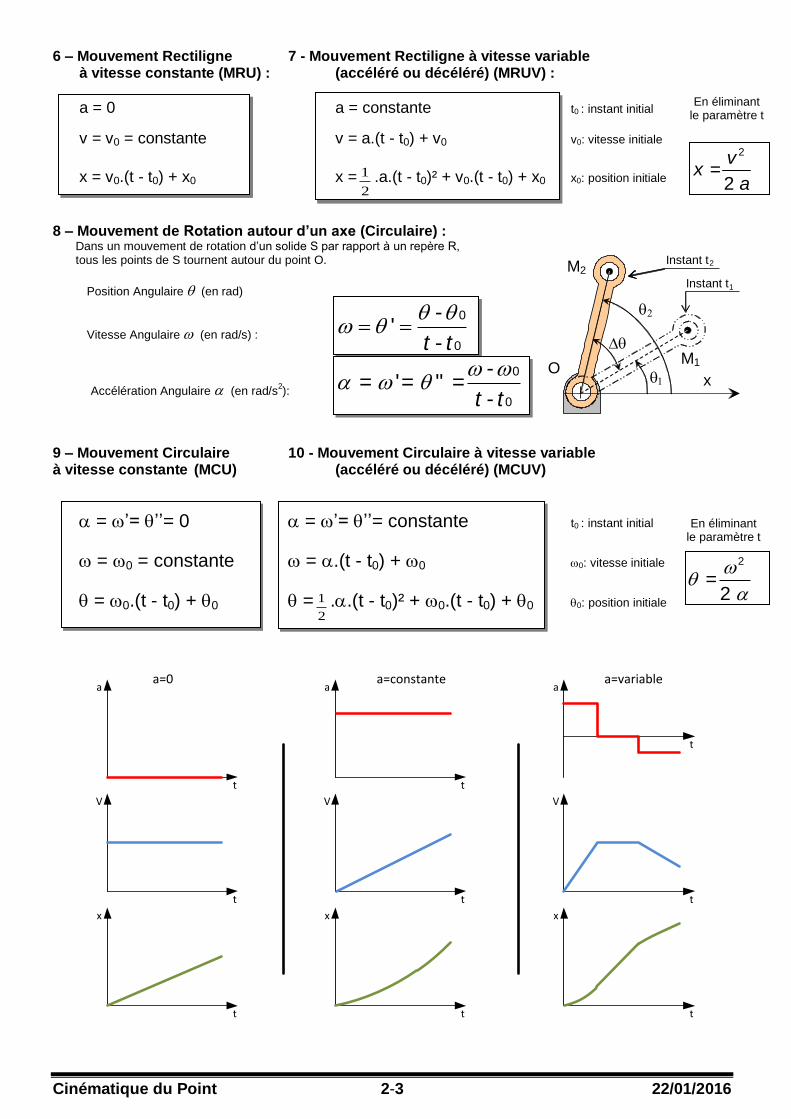
6 – Mouvement Rectiligne 7 - Mouvement Rectiligne à vitesse variable à vitesse constante (MRU) : (accéléré ou décéléré) (MRUV) :
a = 0 a = constante t0 : instant initial
v = v0 = constante v = a.(t - t0) + v0 v0: vitesse initiale
x = v0.(t - t0) + x0 x =2
1 .a.(t - t0)² + v0.(t - t0) + x0 x0: position initiale
8 – Mouvement de Rotation autour d’un axe (Circulaire) : Dans un mouvement de rotation d’un solide S par rapport à un repère R, tous les points de S tournent autour du point O.
Position Angulaire (en rad)
Vitesse Angulaire (en rad/s) :
0
0
-'
-t t
Accélération Angulaire (en rad/s2):
0
0
- = '= '' =
-t t
9 – Mouvement Circulaire 10 - Mouvement Circulaire à vitesse variable à vitesse constante (MCU) (accéléré ou décéléré) (MCUV)
= ’= ’’= 0 = ’= ’’= constante t0 : instant initial
= 0 = constante = .(t - t0) + 0 0: vitesse initiale
= 0.(t - t0) + 0 =2
1 ..(t - t0)² + 0.(t - t0) + 0 0: position initiale
a
t
V
t
x
t
a
t
V
t
x
t
V
t
x
t
a=0 a=constante a=variablea
t
2
= 2
2
= 2
vx
a
M1
M2
x
Instant t 1
Instant t 2
O
En éliminant le paramètre t
En éliminant le paramètre t
Cinématique du Point 3-3 22/01/2016
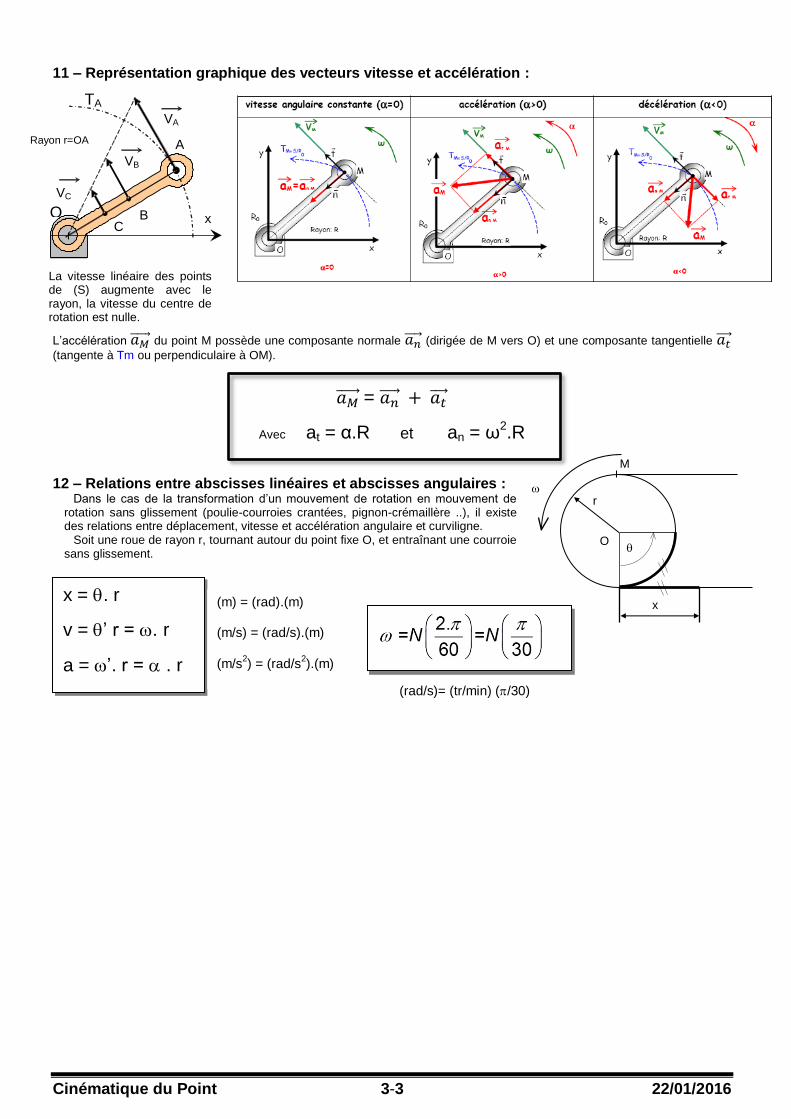
11 – Représentation graphique des vecteurs vitesse et accélération :
.
L’accélération 𝑎𝑀⃗⃗⃗⃗ ⃗ du point M possède une composante normale 𝑎𝑛⃗⃗⃗⃗ (dirigée de M vers O) et une composante tangentielle 𝑎𝑡⃗⃗ ⃗
(tangente à Tm ou perpendiculaire à OM).
𝑎𝑀⃗⃗ ⃗⃗ ⃗ = 𝑎𝑛⃗⃗ ⃗⃗ + 𝑎𝑡⃗⃗ ⃗
Avec at = α.R et an = ω2.R
12 – Relations entre abscisses linéaires et abscisses angulaires : Dans le cas de la transformation d’un mouvement de rotation en mouvement de
rotation sans glissement (poulie-courroies crantées, pignon-crémaillère ..), il existe des relations entre déplacement, vitesse et accélération angulaire et curviligne.
Soit une roue de rayon r, tournant autour du point fixe O, et entraînant une courroie sans glissement.
A
x
TA
Rayon r=OA
O
VC
C B
VB
VA
r
M
O
x
x = . r
v = ’ r = . r
a = ’. r = . r
La vitesse linéaire des points de (S) augmente avec le rayon, la vitesse du centre de rotation est nulle.
(m) = (rad).(m) (m/s) = (rad/s).(m)
(m/s2) = (rad/s
2).(m)
(rad/s)= (tr/min) (/30)





























